
Circulating Current Reduction Strategy for Parallel-Connected Inverters Based IPT Systems


Abstract
:1. Introduction
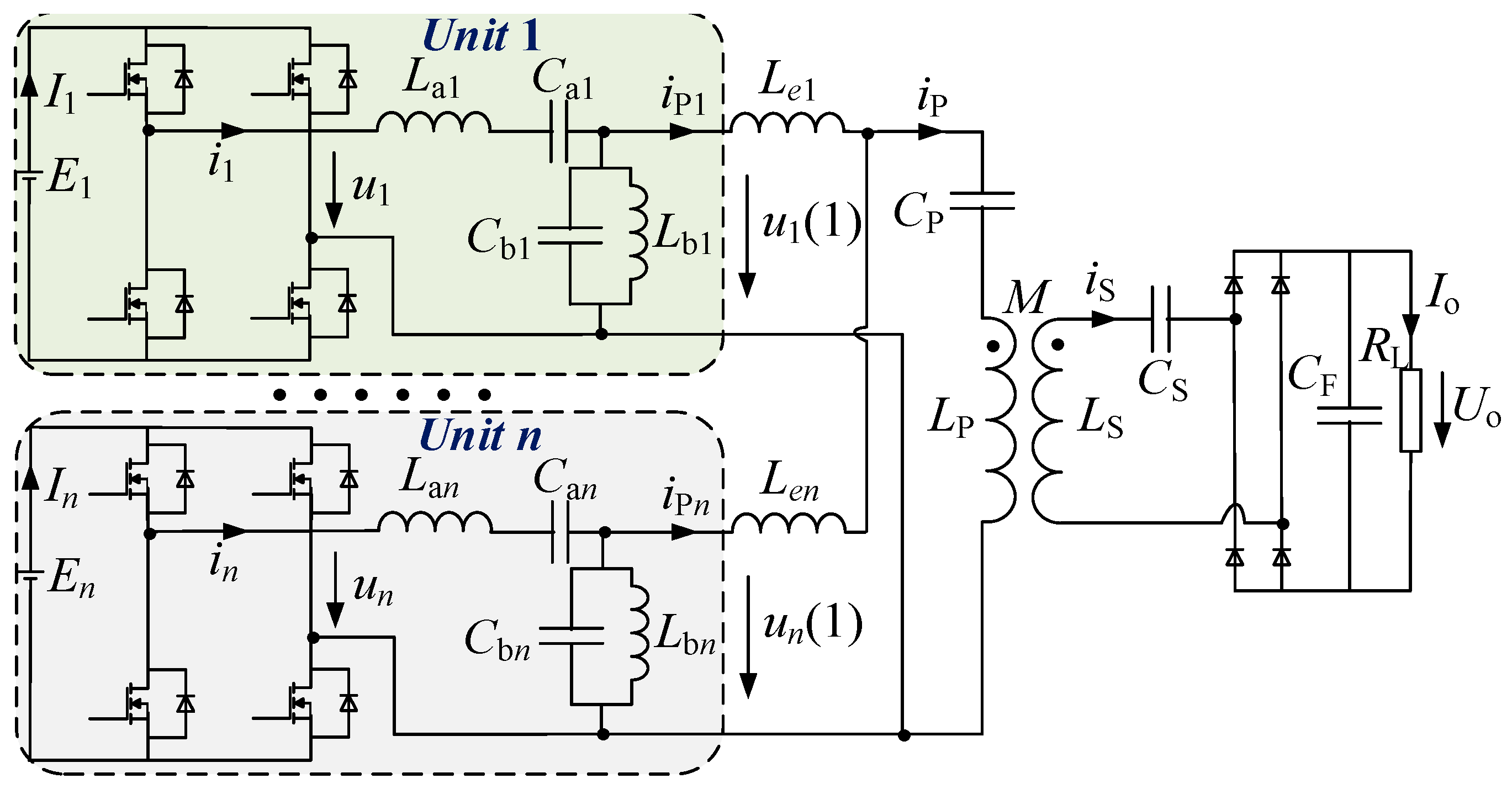
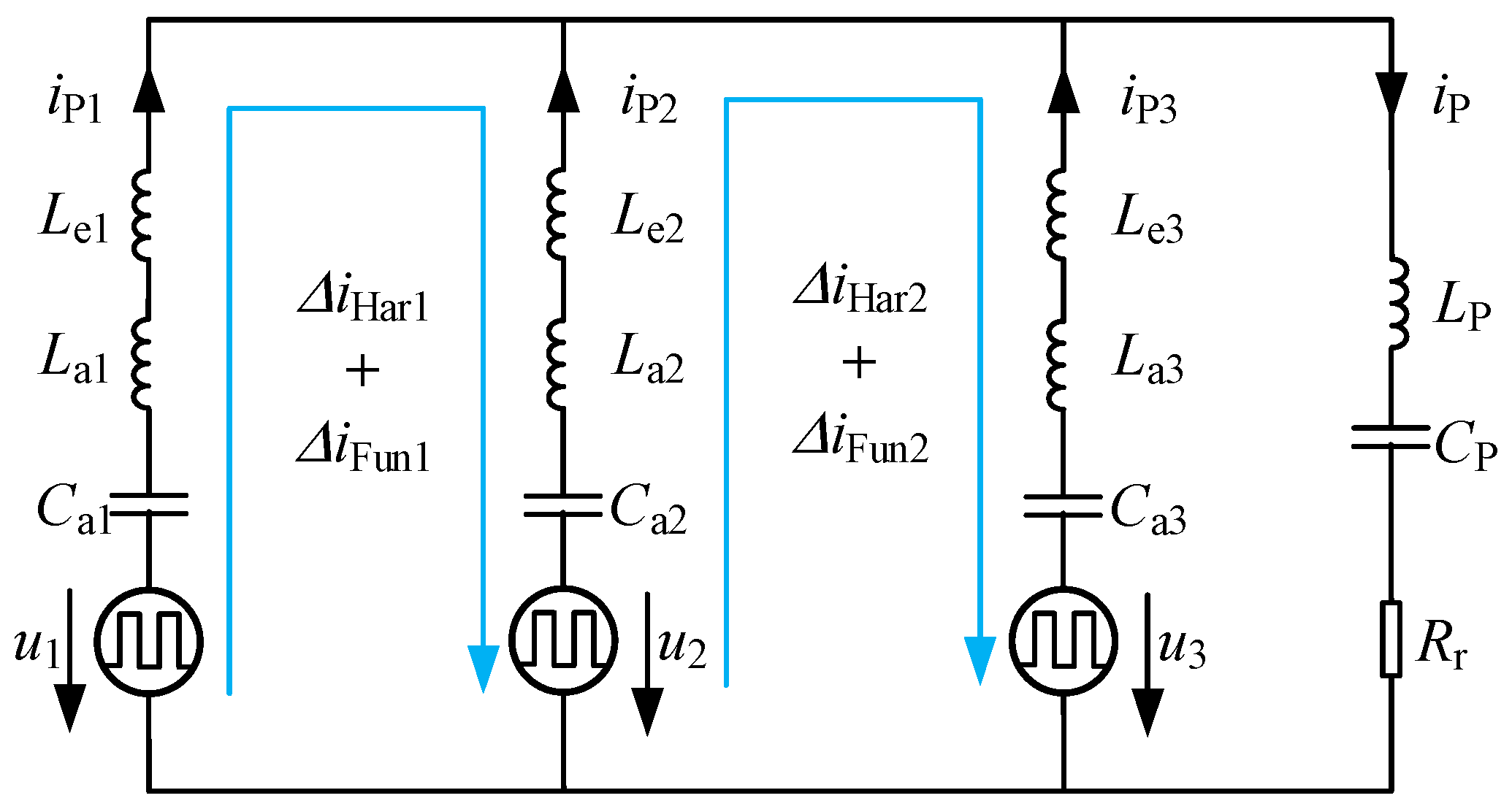
2. Principle Description of the Parallel-Connected Inverter Topology
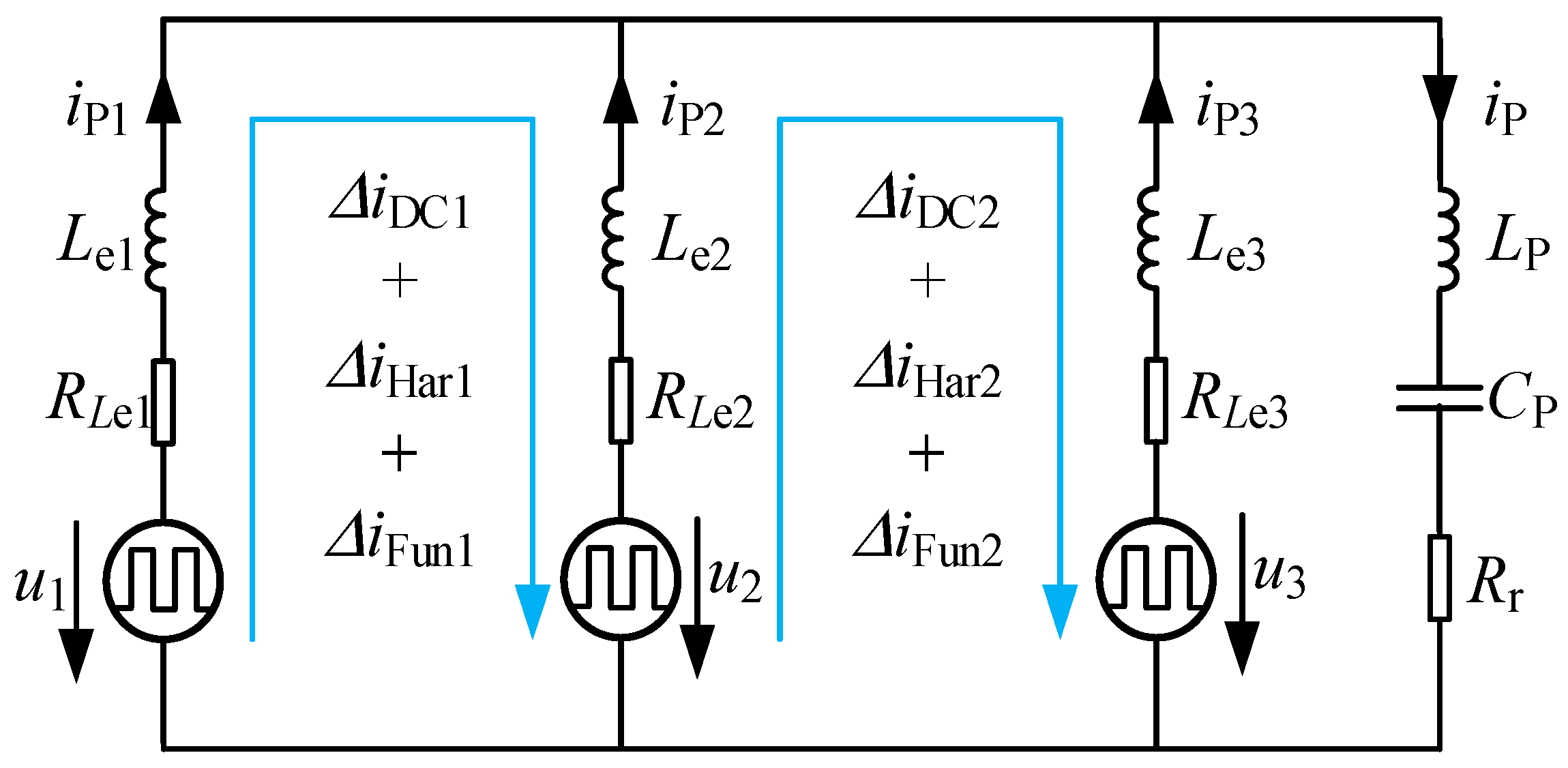
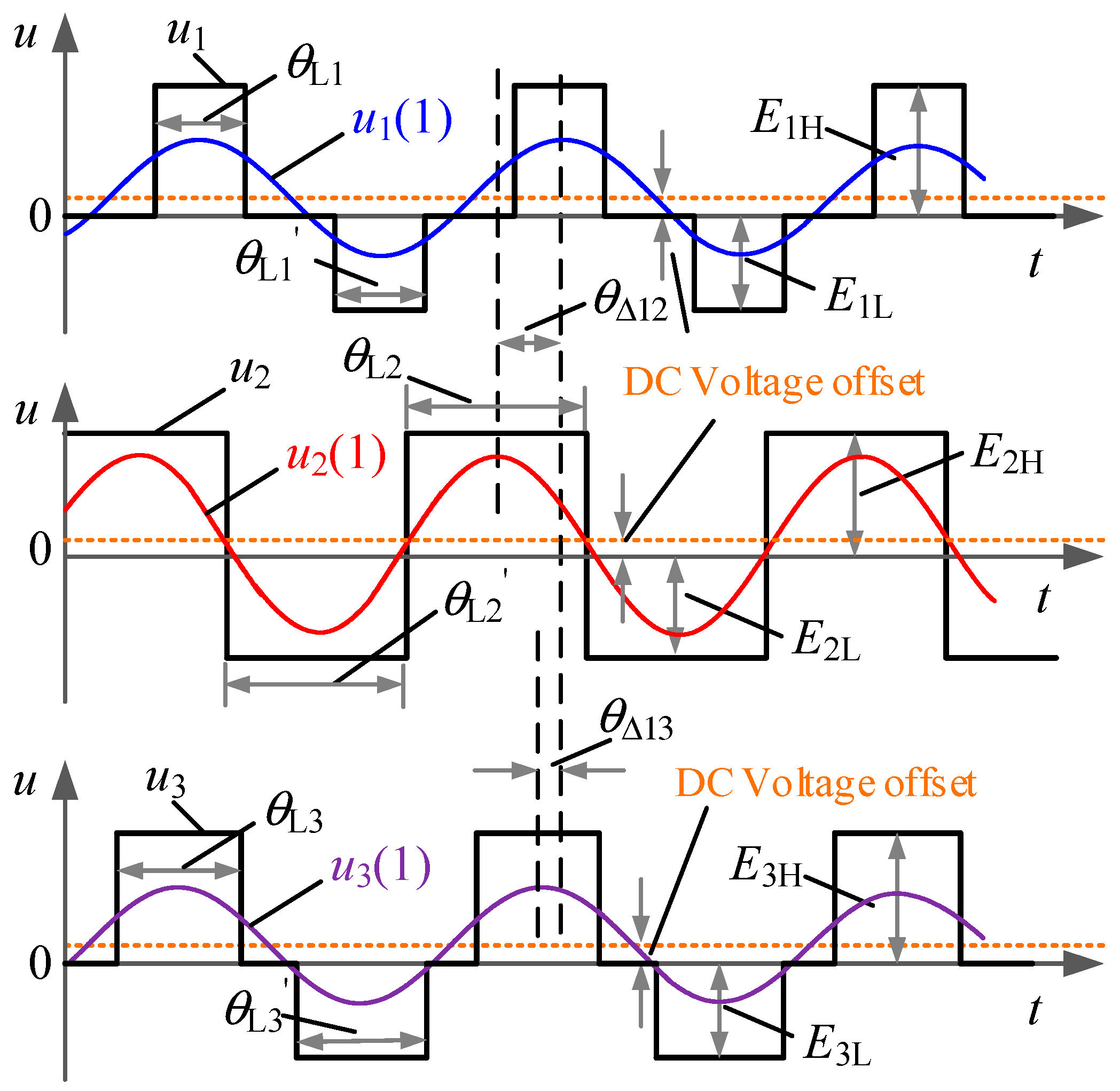
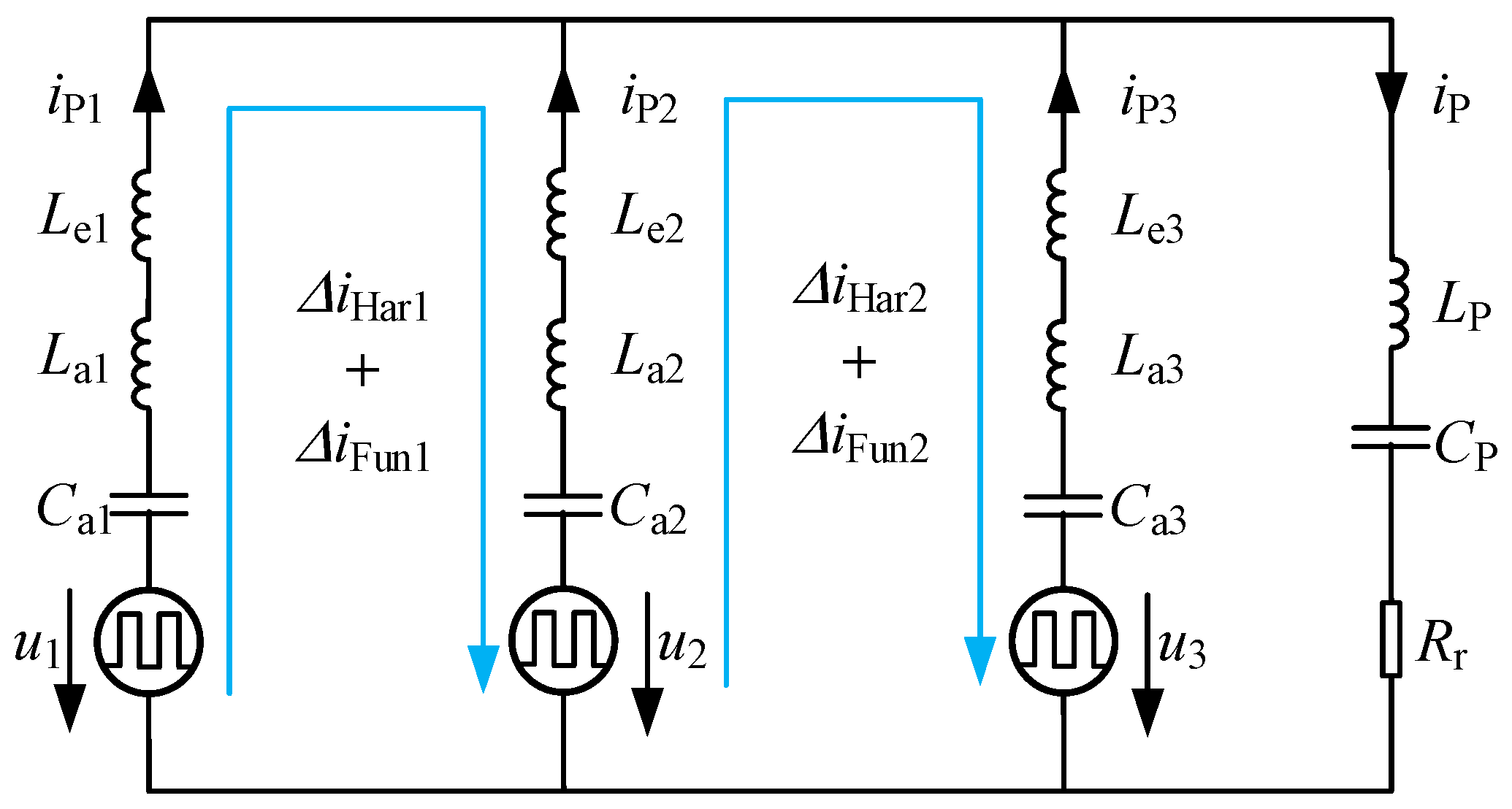
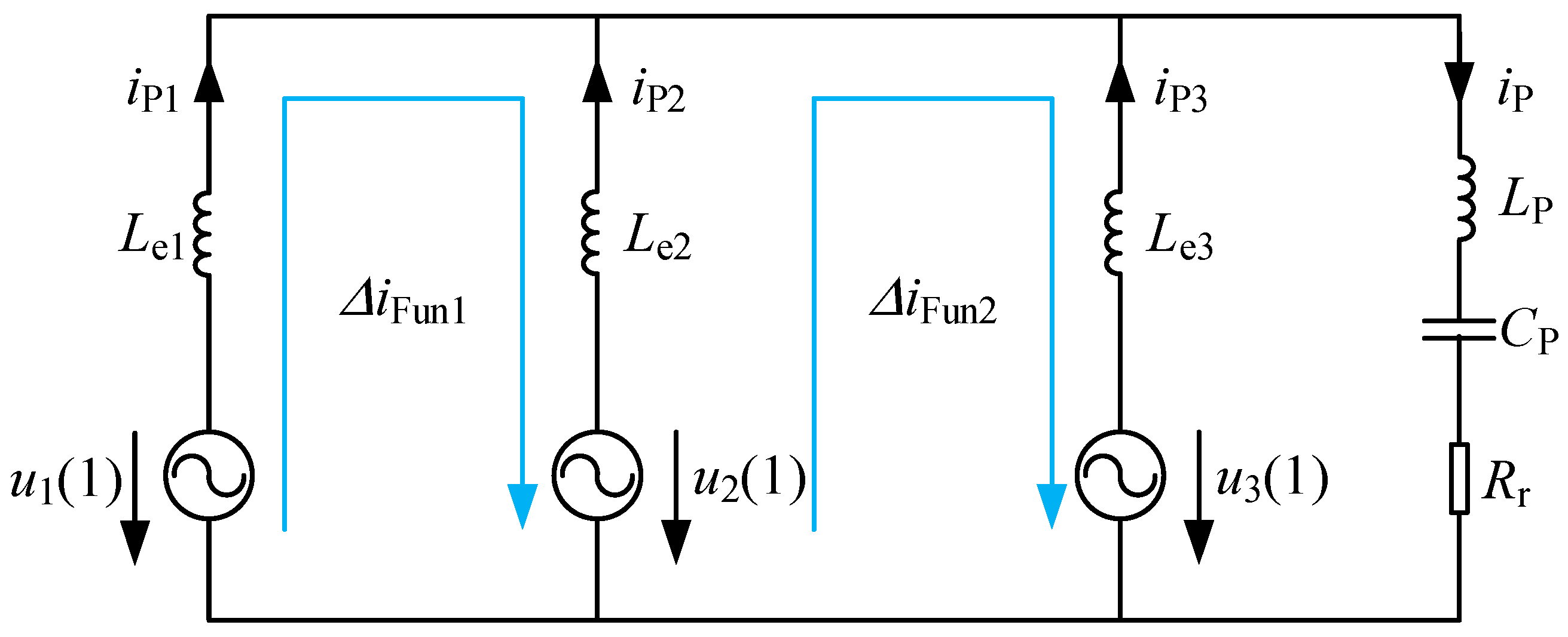
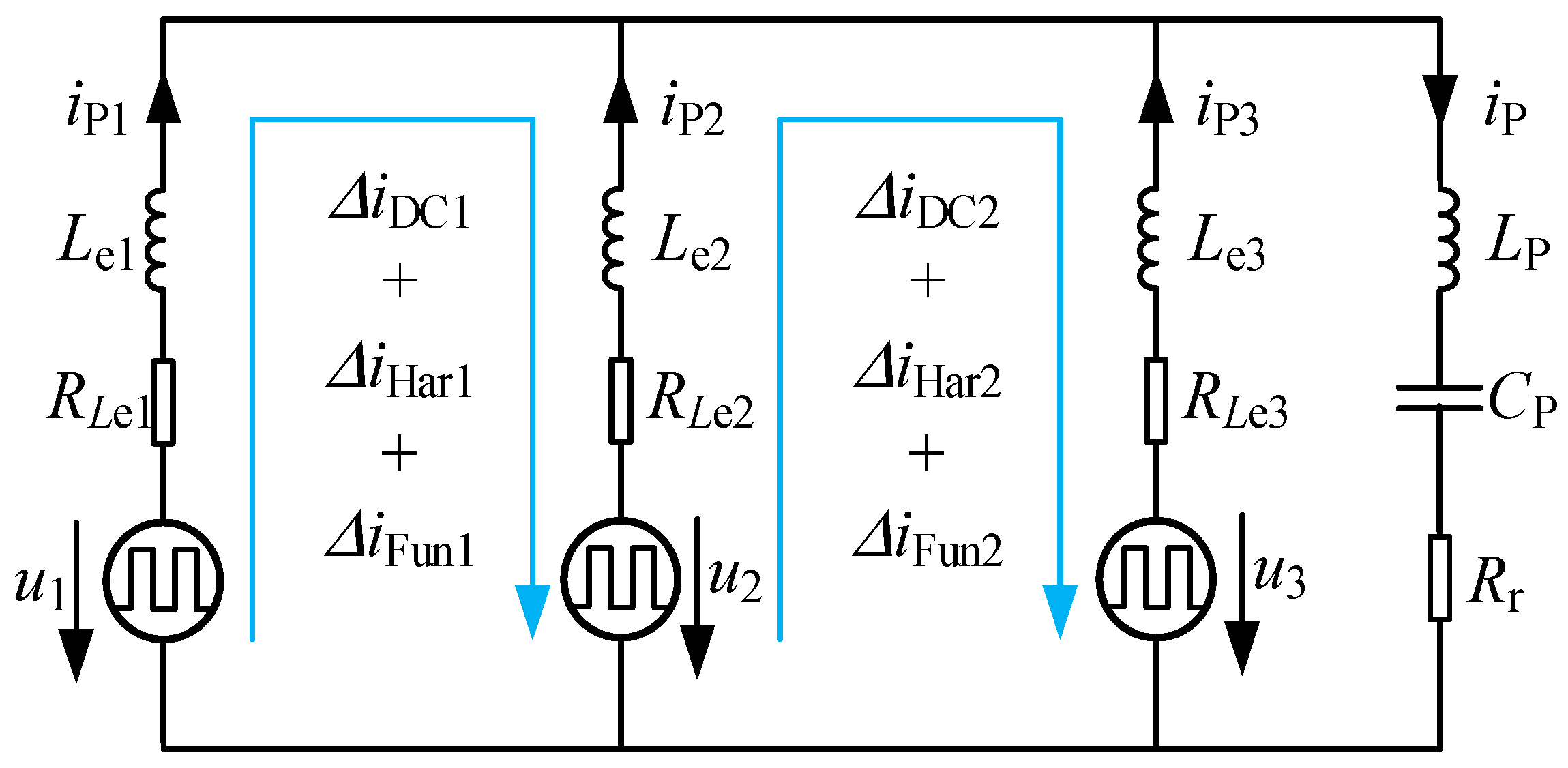
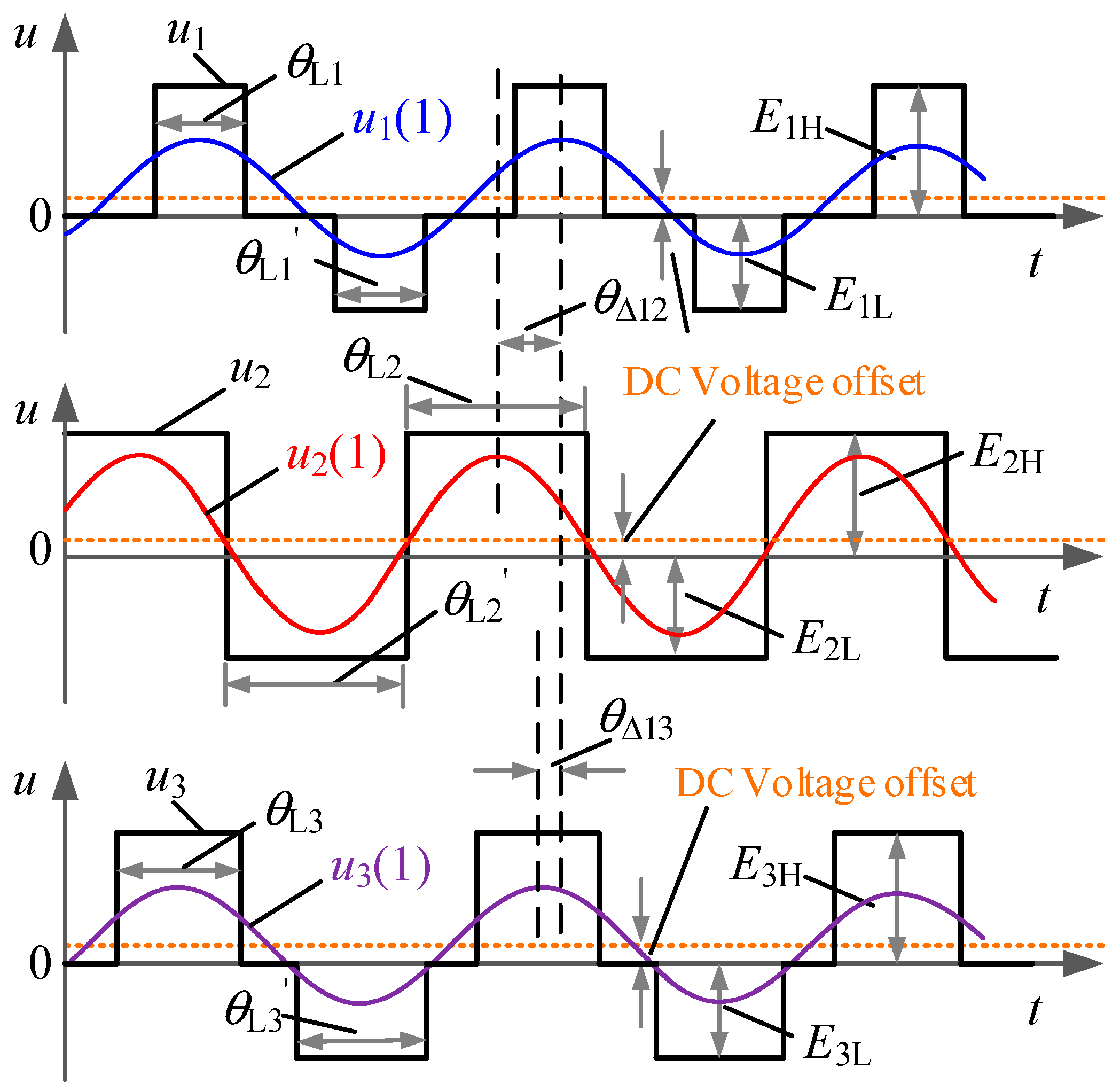
3. Analysis of the Fundamental Circulating Current
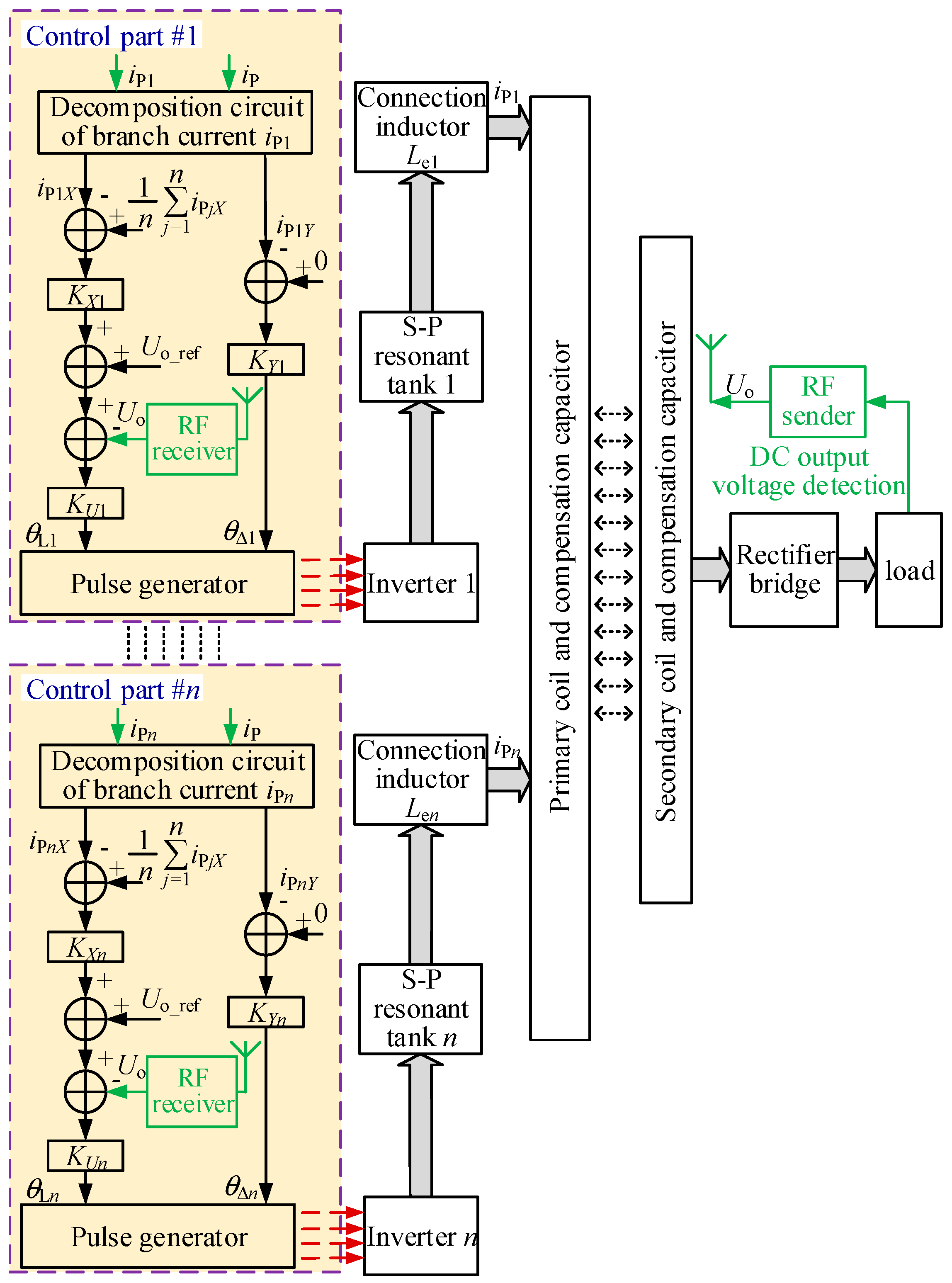
4. Analysis of a Current Decomposed Method and Control Diagram
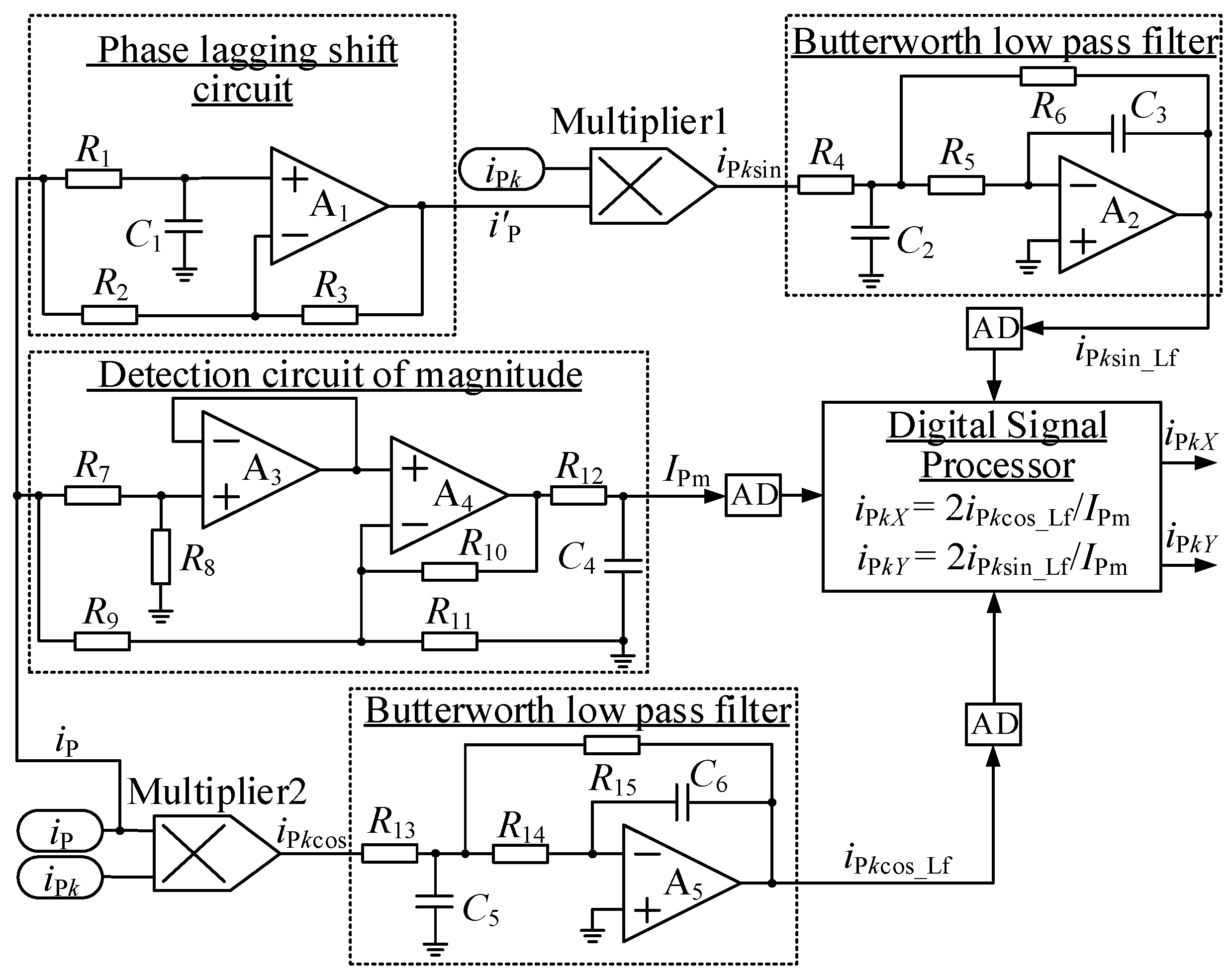
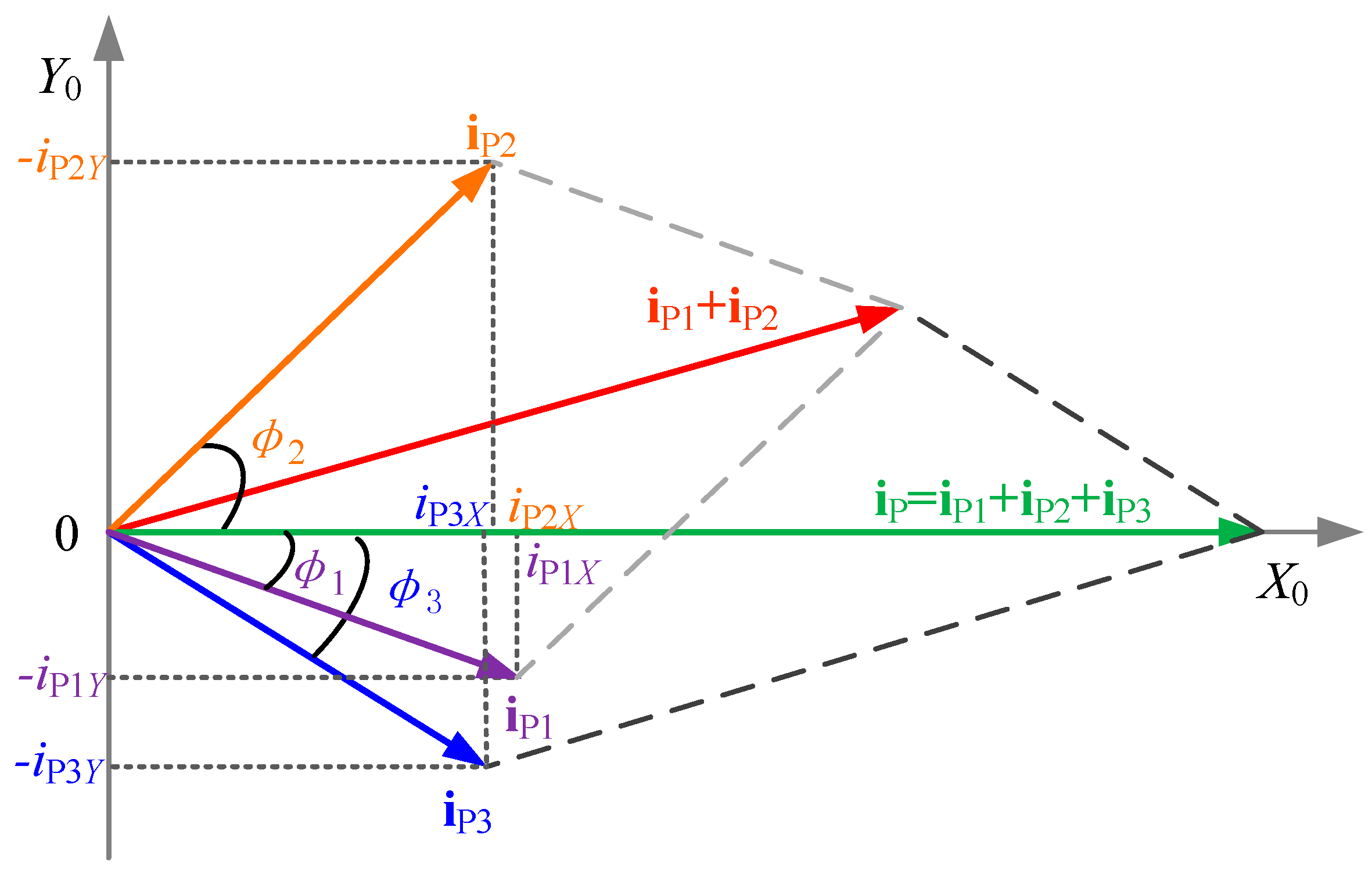
4.1. Current Decomposition
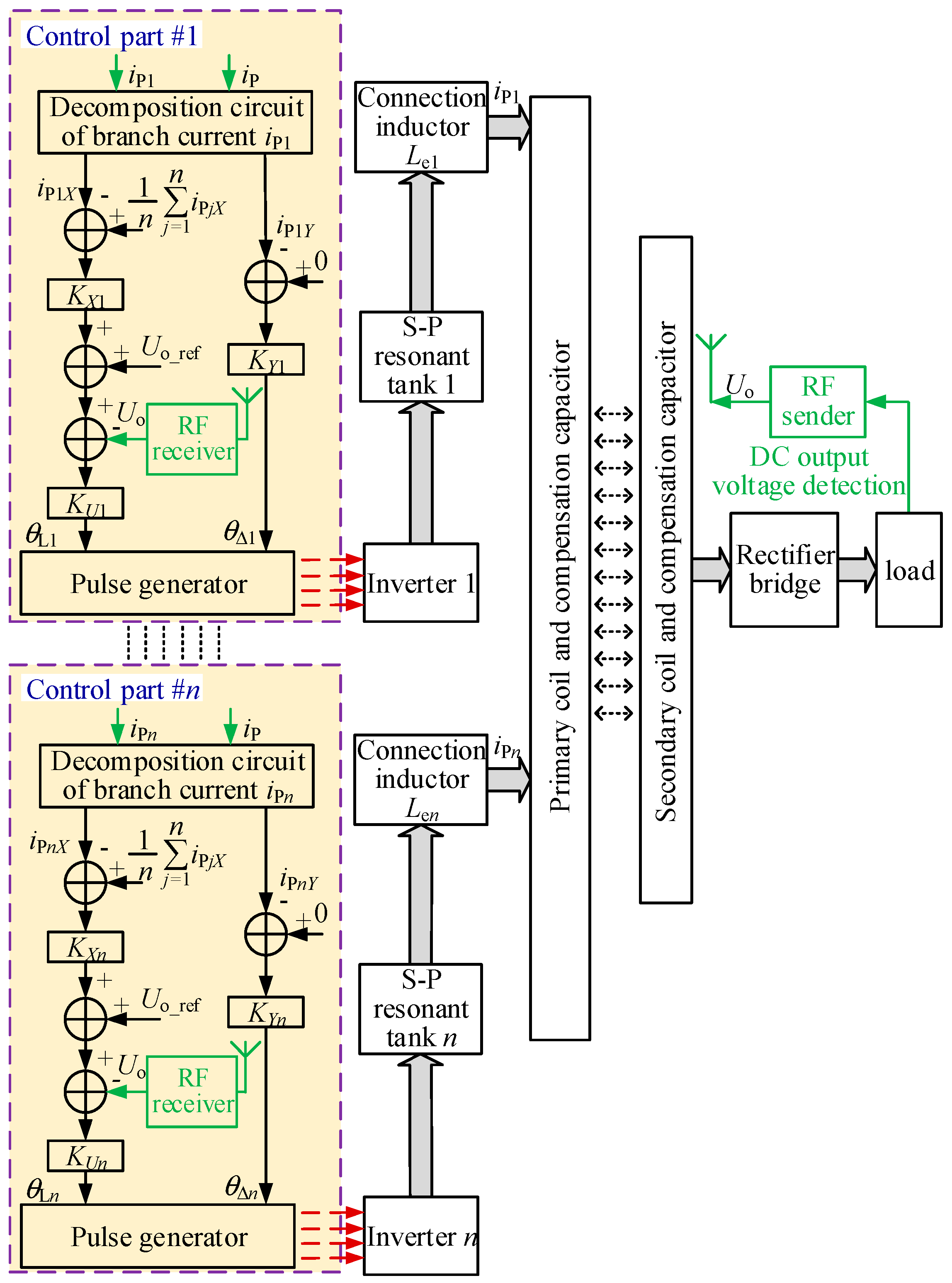
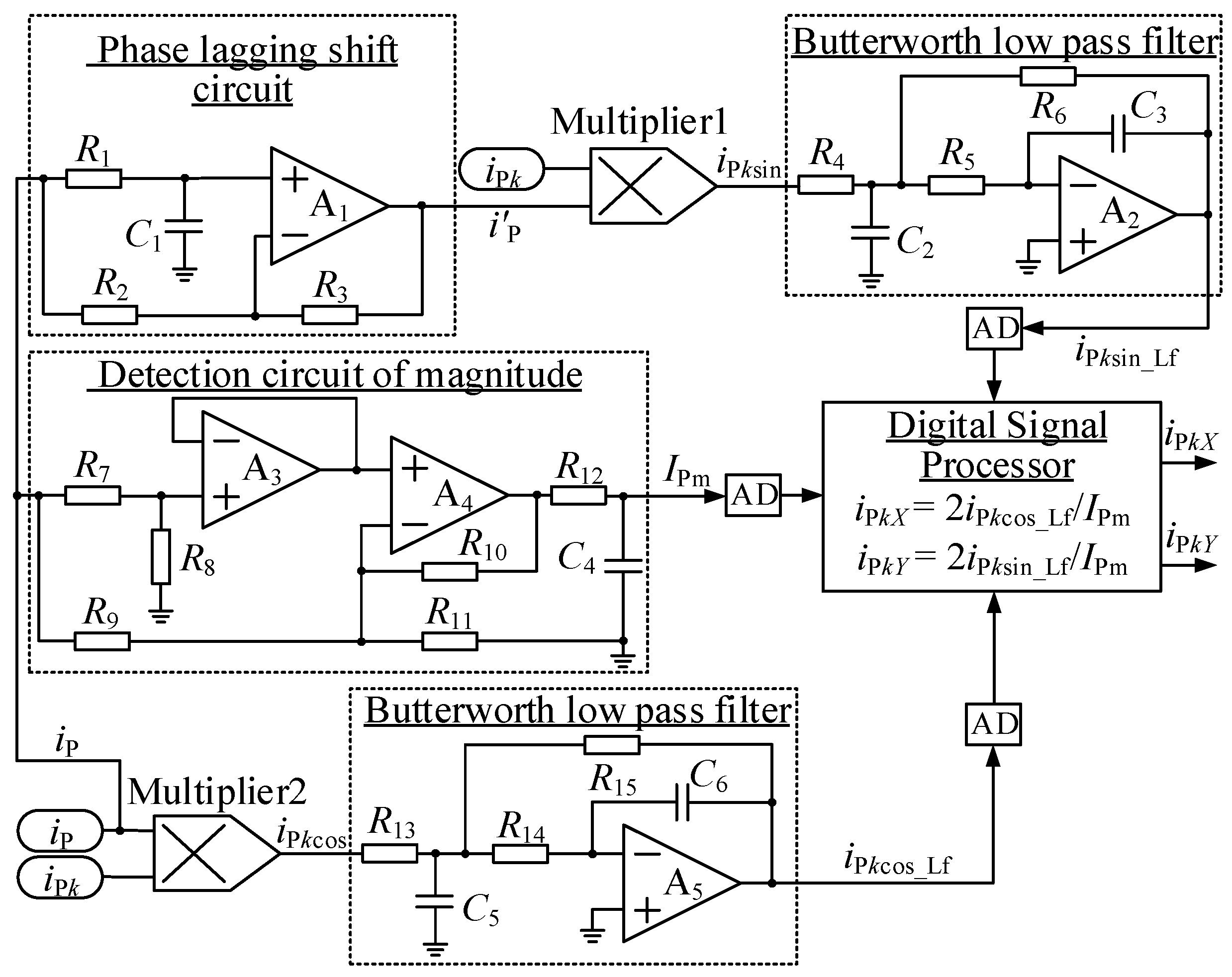
4.2. Control Diagram
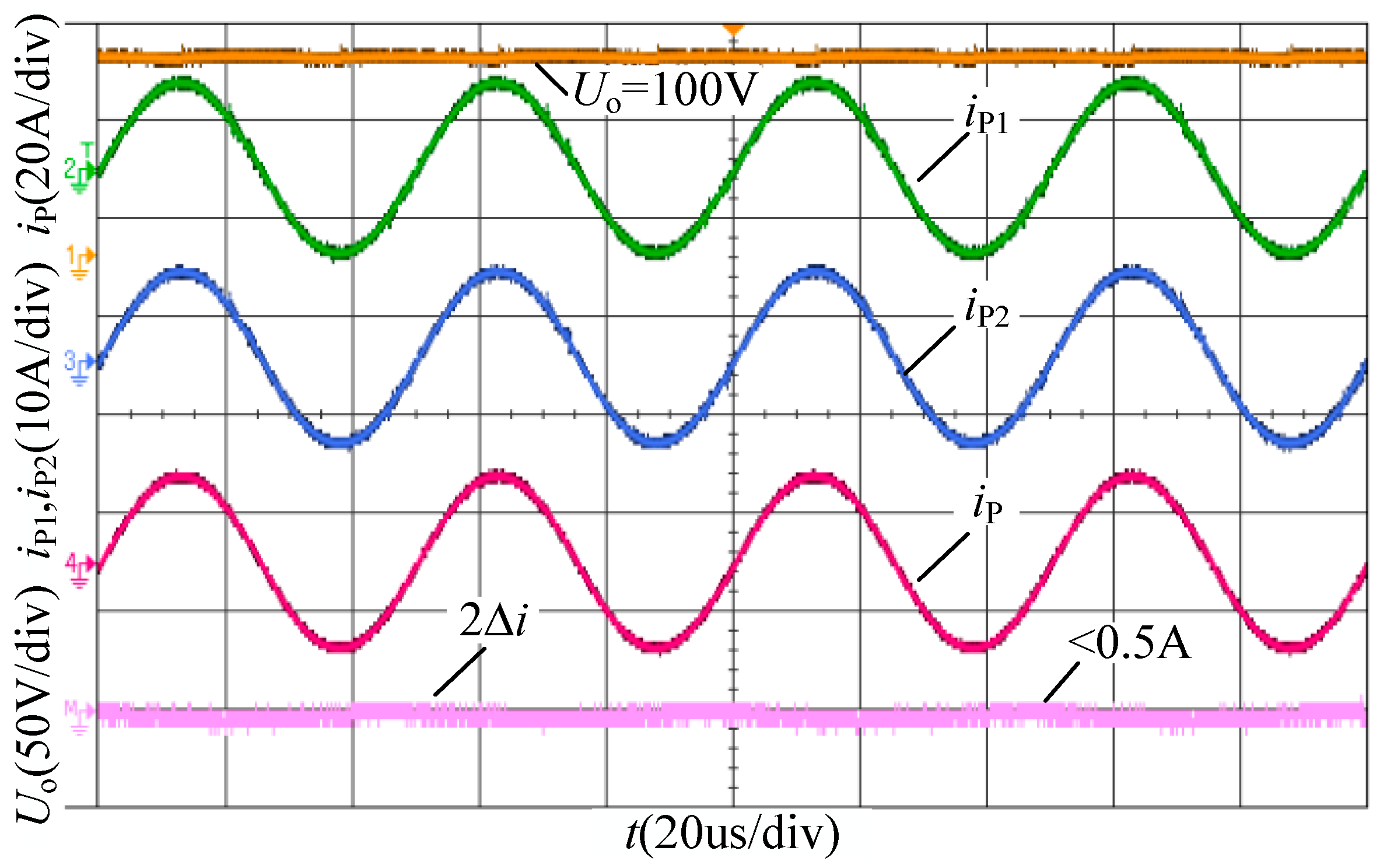
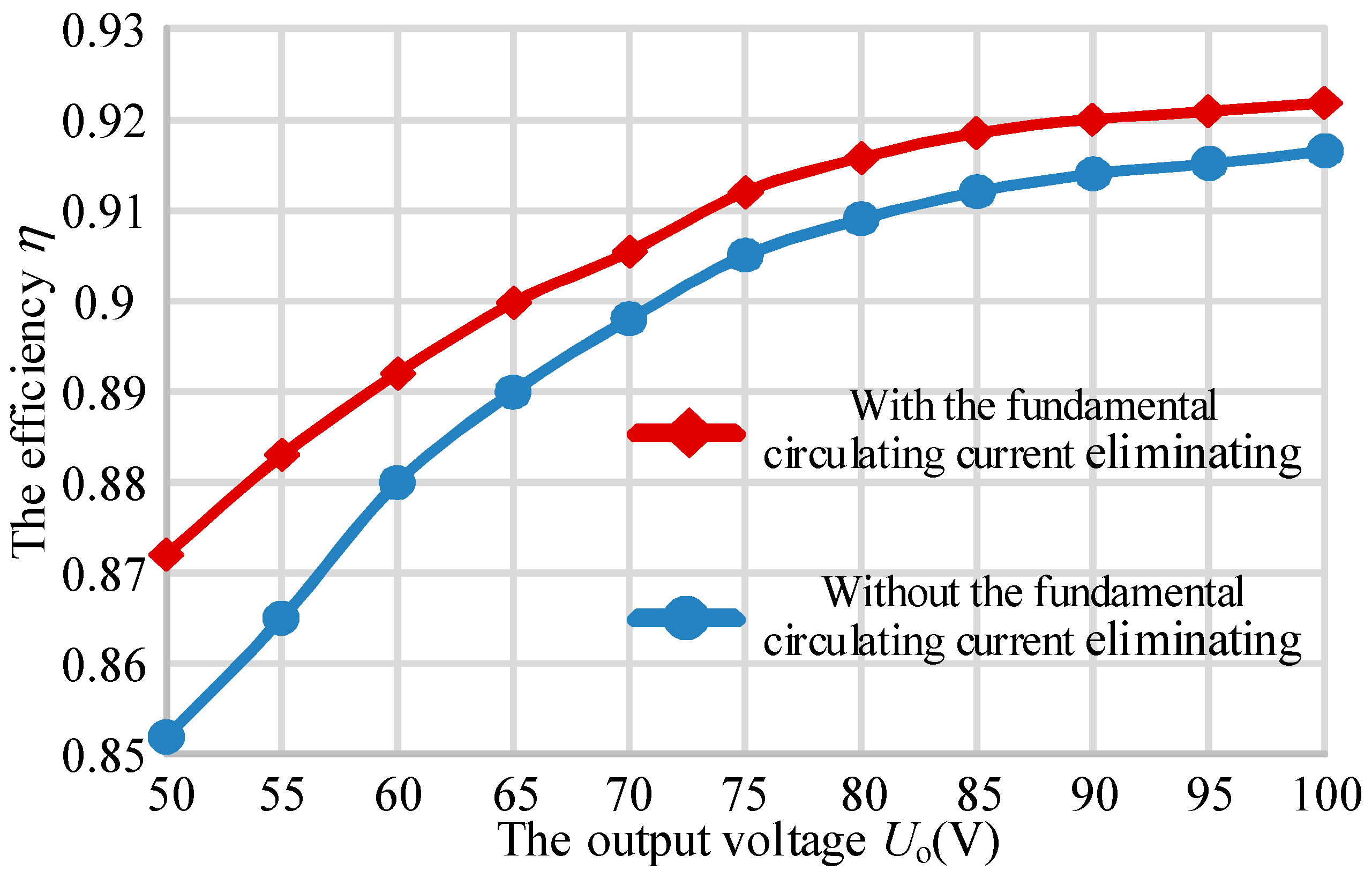
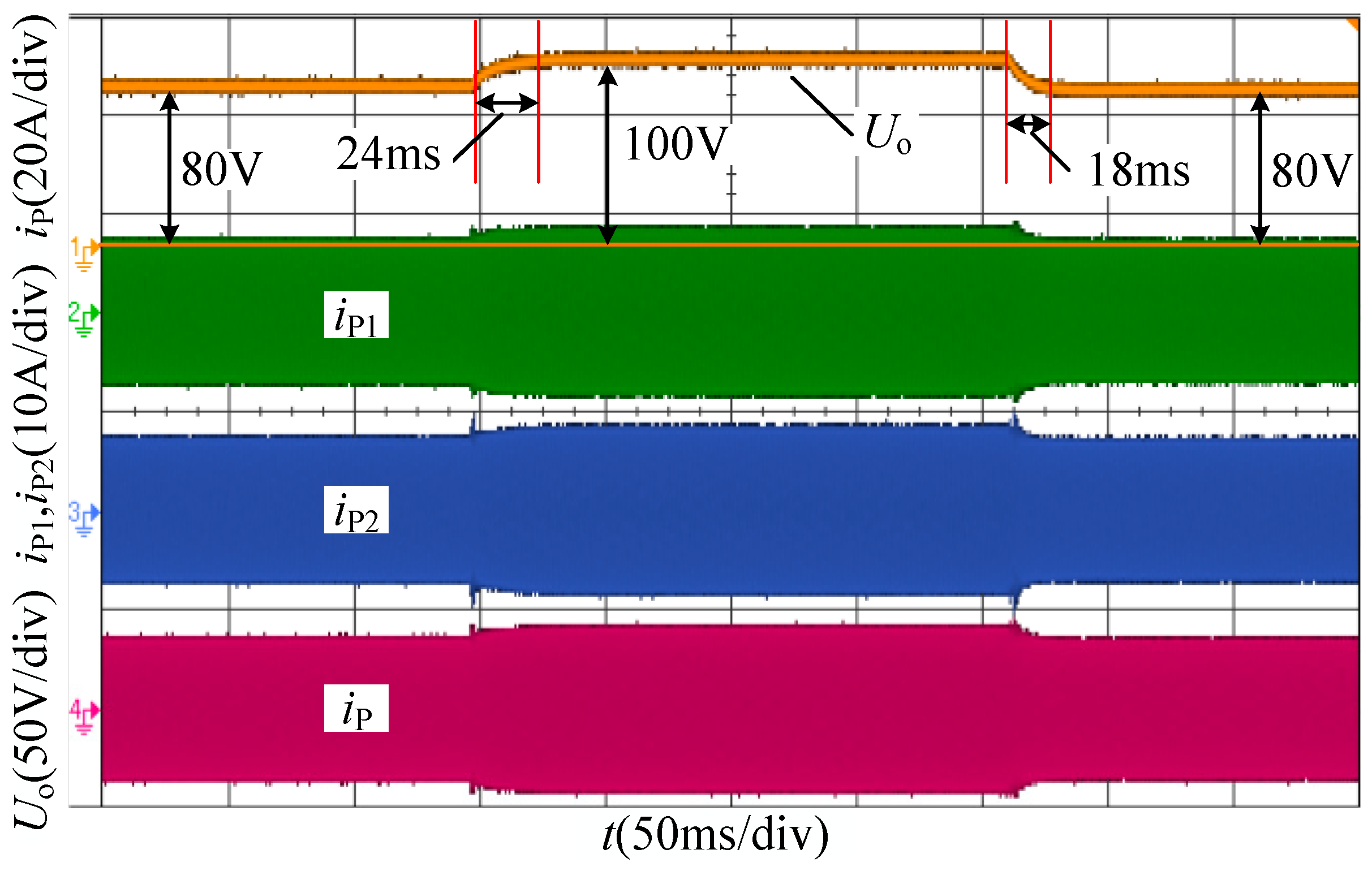
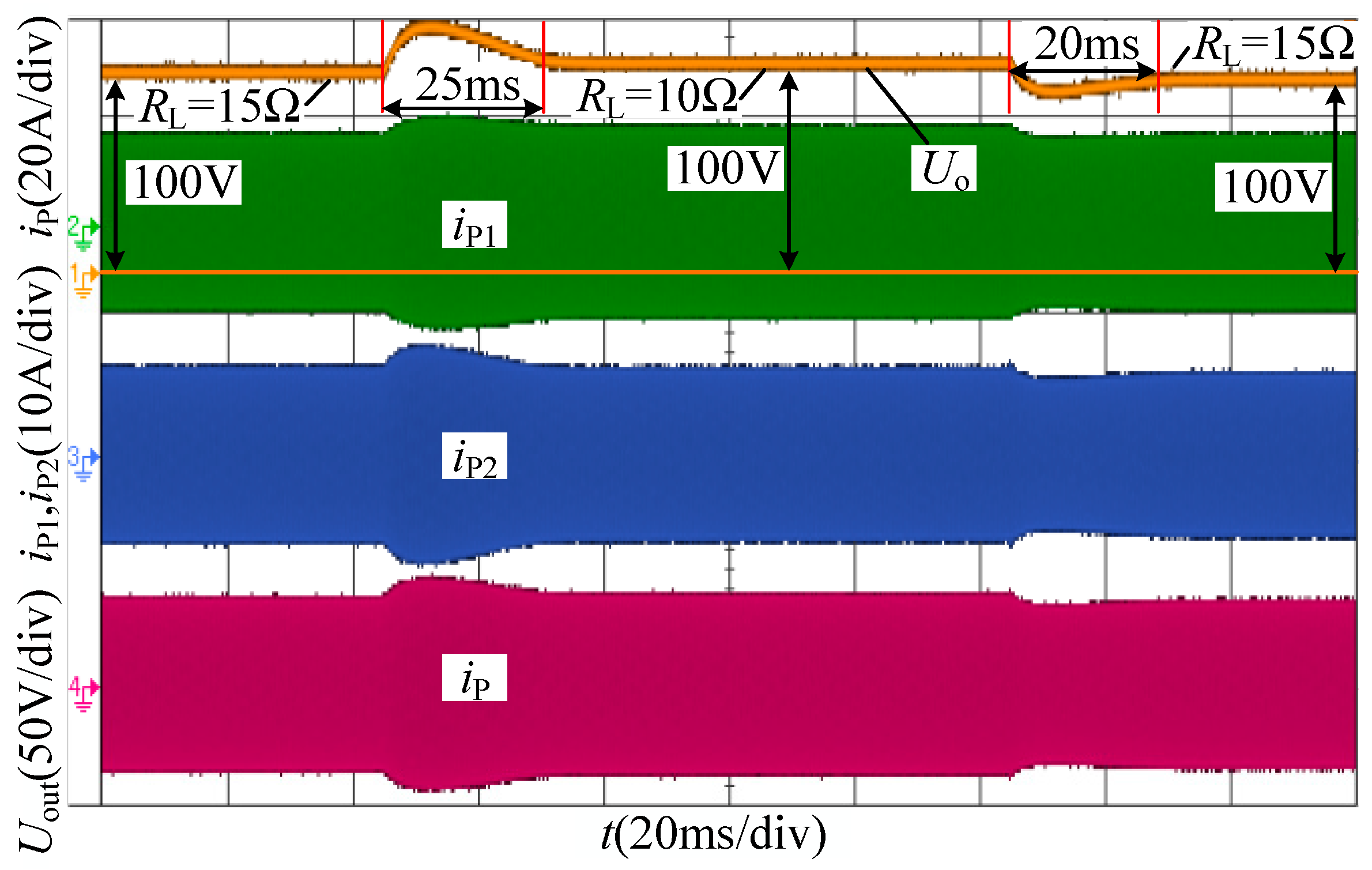
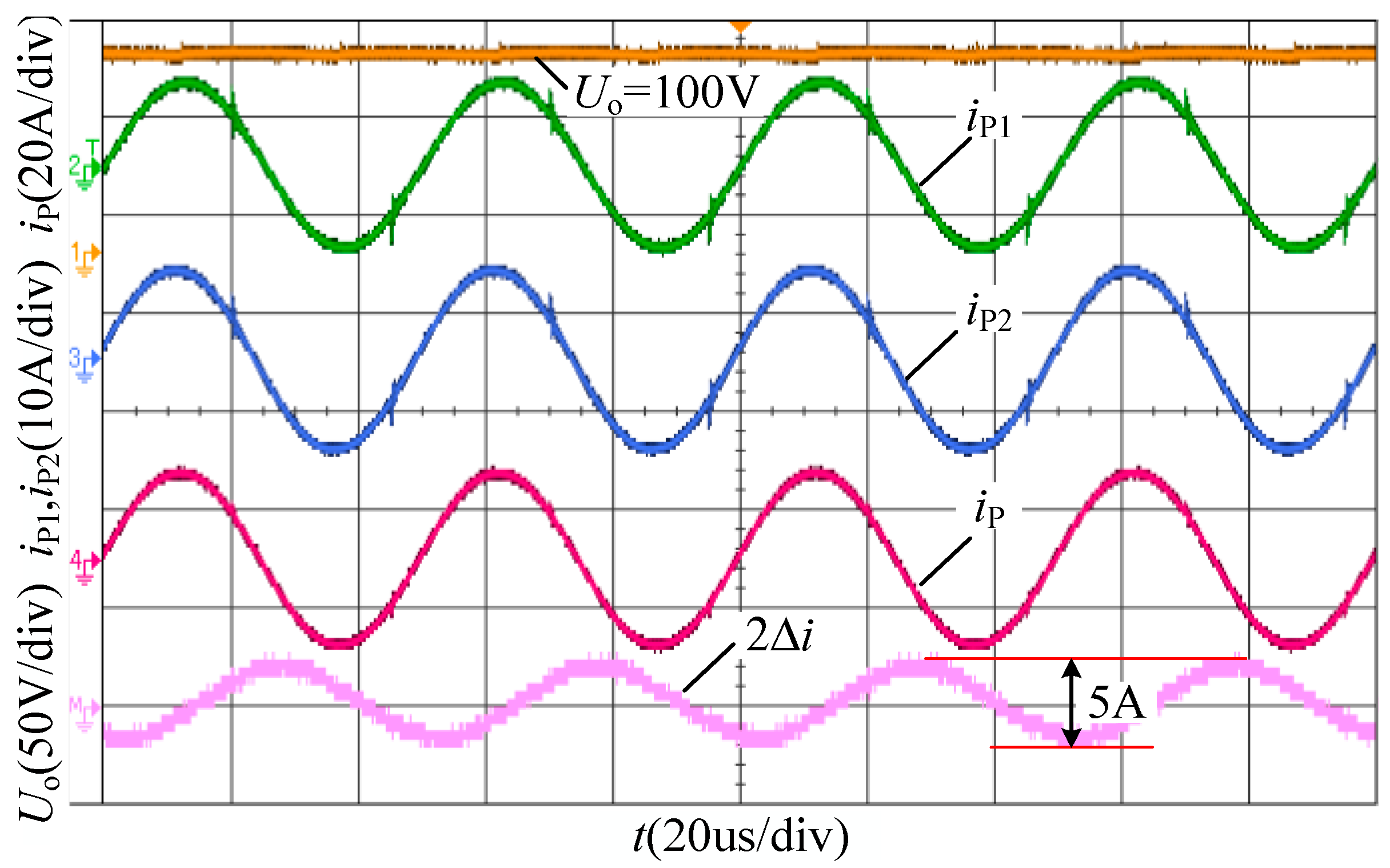
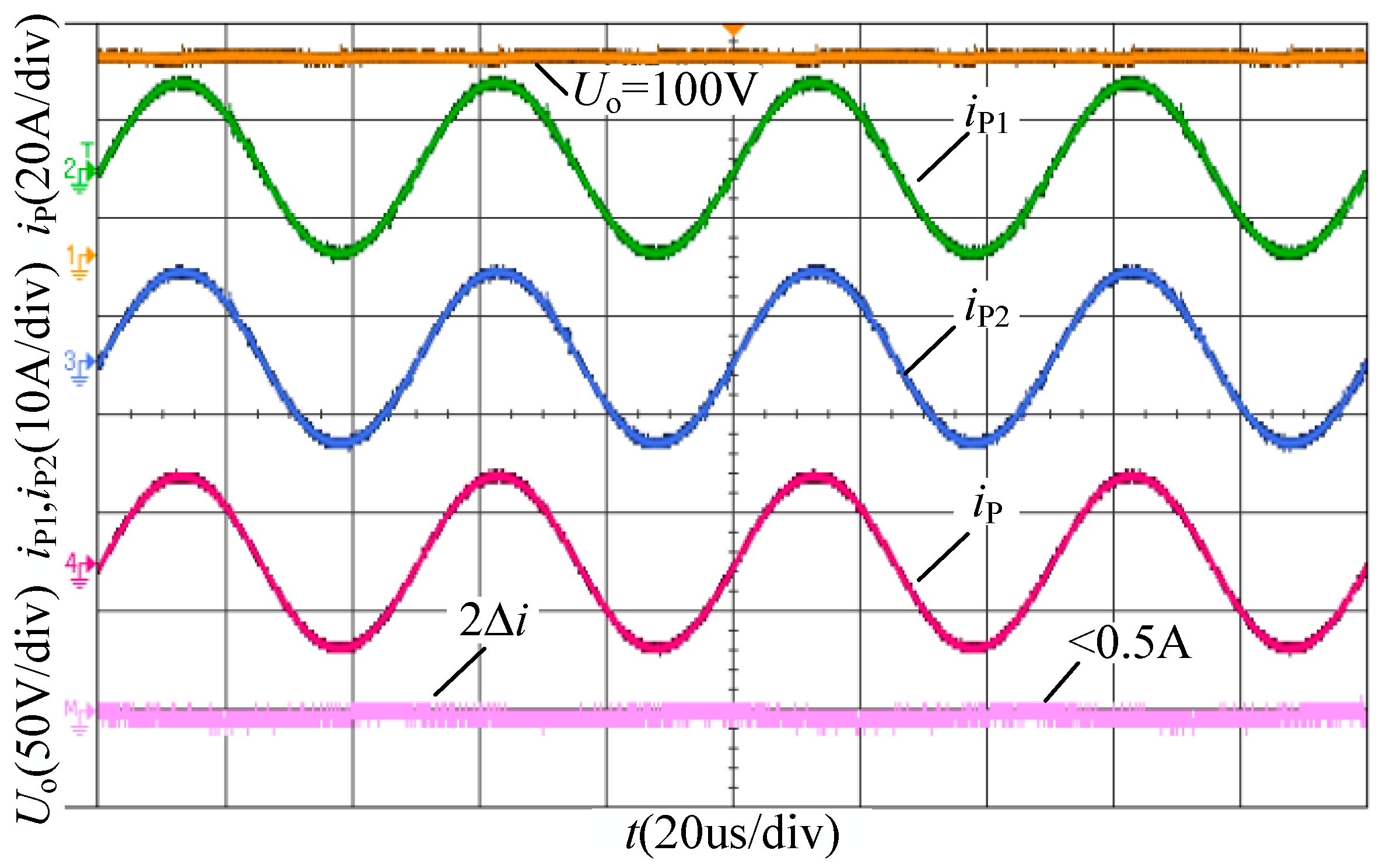
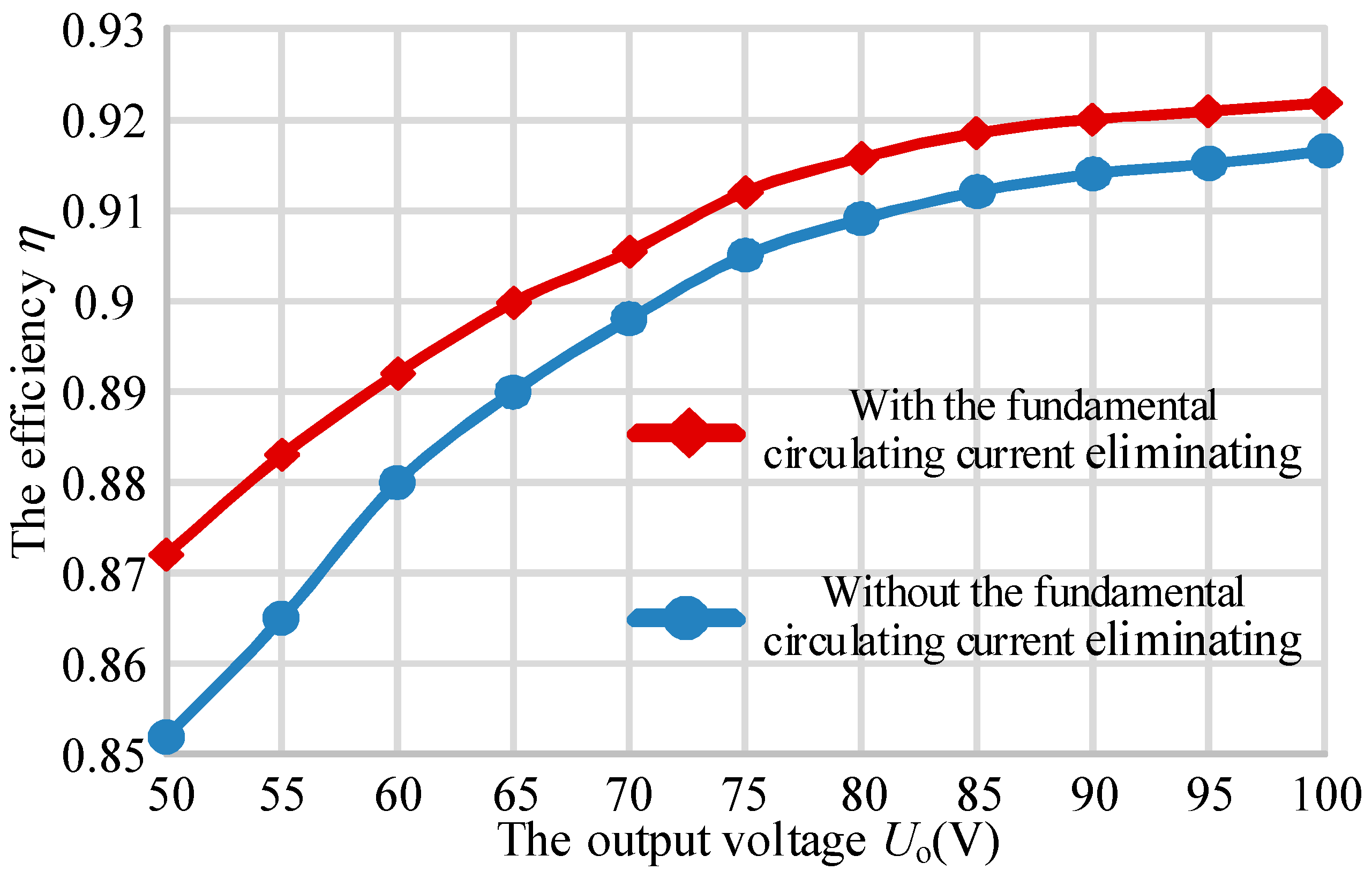
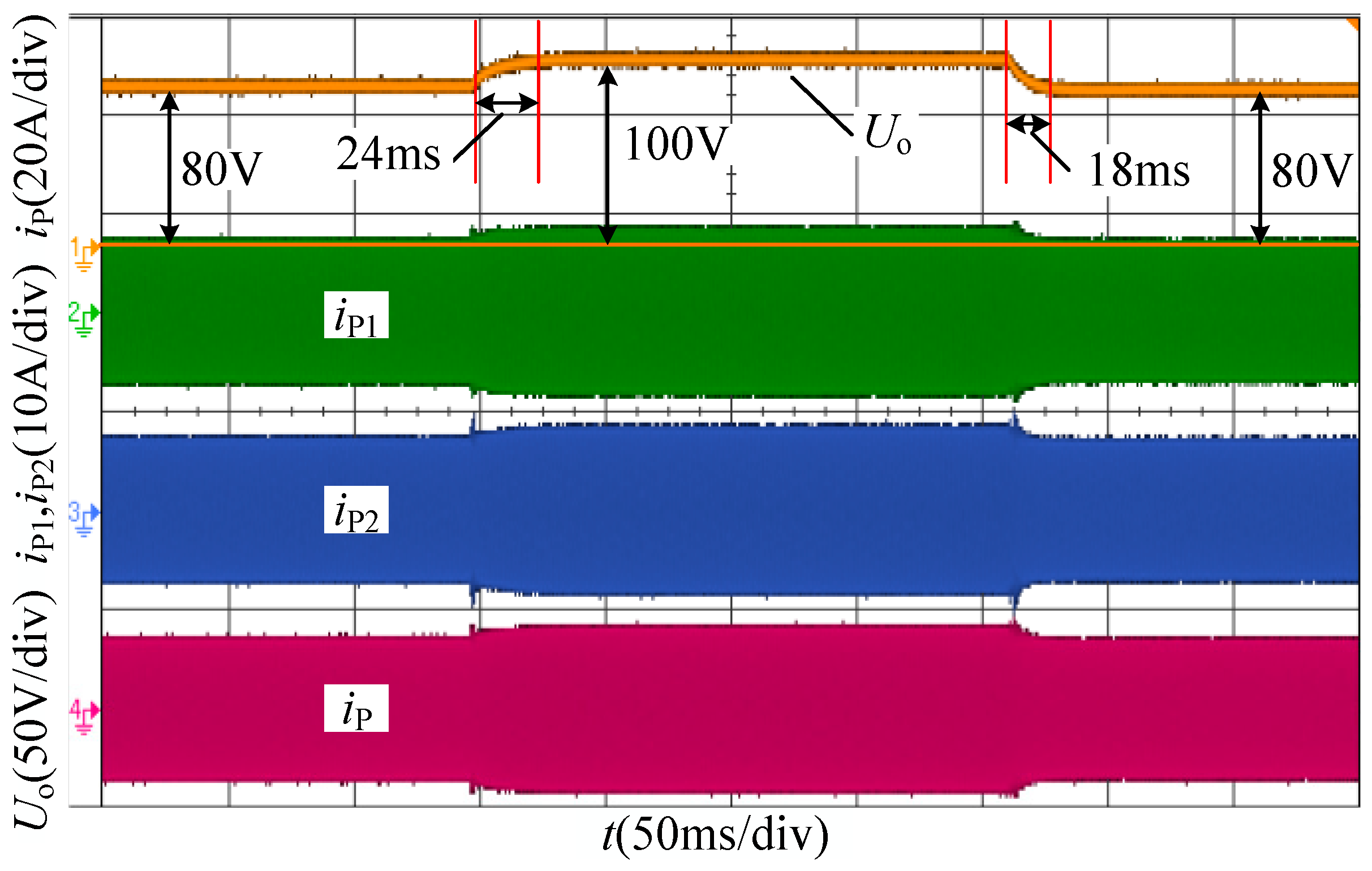
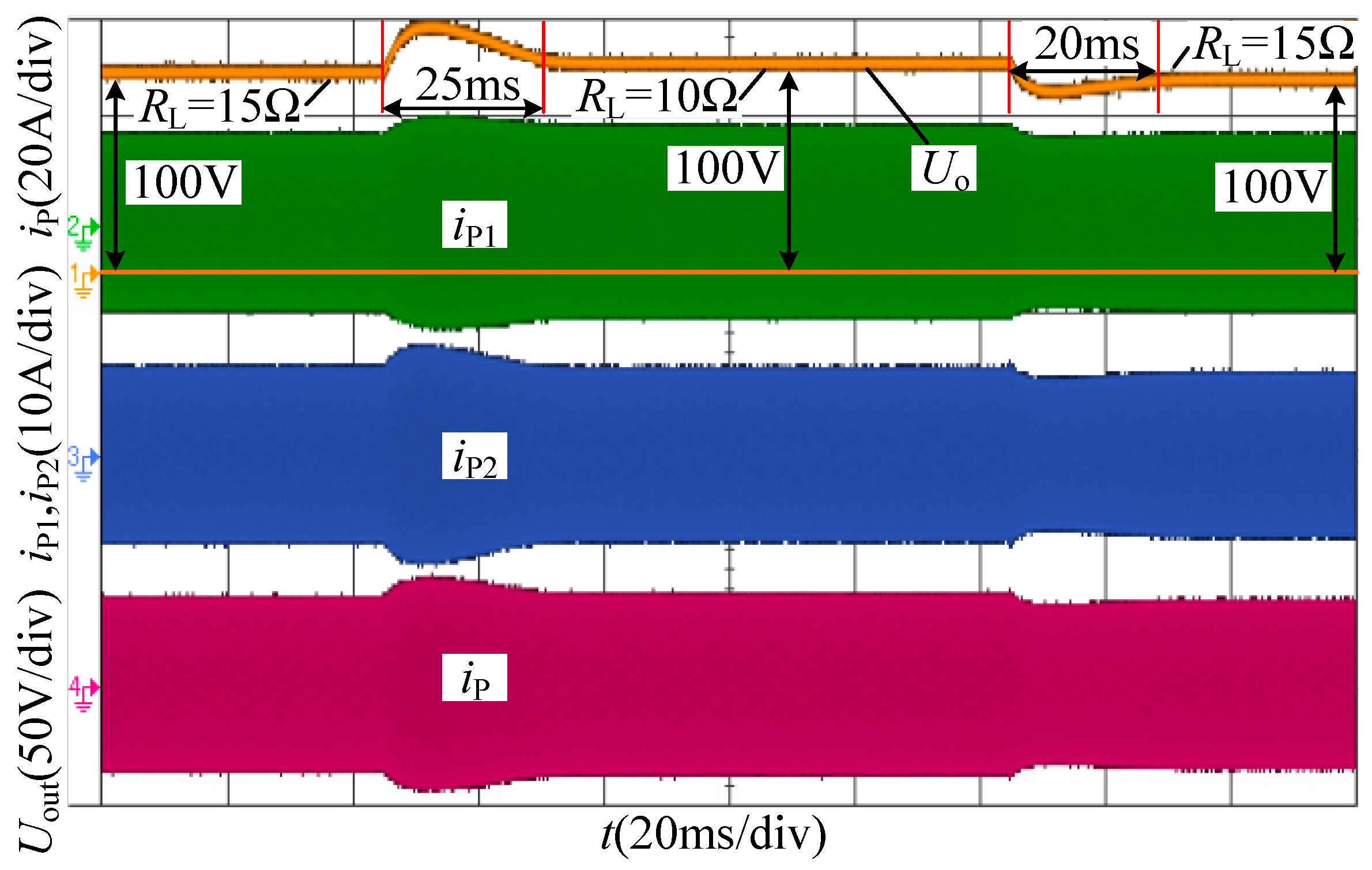
5. Experimental Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| DC input voltage of each MOSFET inverter | |
| DC input current of each MOSFET inverter | |
| Resonant inductance of each unit in series | |
| Resonant capacitance of each unit in series | |
| Resonant inductance of each unit in parallel | |
| Resonant capacitance of each unit in parallel | |
| The connection inductance of each unit in parallel | |
| The number of parallel units | |
| The output voltage of each inverter | |
| The output current of each inverter | |
| The output fundamental voltage of each parallel unit | |
| The branch current of each parallel unit | |
| The compensation capacitance of the primary circuit | |
| The current in the primary coil | |
| The inductance of the primary coil | |
| The mutual inductance between the primary and the secondary coils | |
| The inductance of the secondary coil | |
| The compensation capacitance of the secondary coil | |
| The current in the secondary coil | |
| The capacitance of the load-side DC filter | |
| The equivalent load resistance | |
| The output voltage across the load | |
| The output current through the load |
References
- Boys, J.T.; Covic, G.A.; Green, A.W. Stability and control of inductively coupled power transfer systems. IEE Proc. Electr. Power Appl. 2000, 147, 37–43. [Google Scholar] [CrossRef]
- Aditya, K.; Williamson, S. Linearization and control of series-series compensated inductive power transfer system based on extended describing function concept. Energies 2016, 9, 962. [Google Scholar] [CrossRef]
- Li, Y.L.; Sun, Y.; Dai, X. μ-Synthesis for frequency uncertainty of the ICPT system. IEEE Trans. Ind. Electron. 2013, 60, 291–300. [Google Scholar] [CrossRef]
- Wen, F.; Huang, X. Optimal magnetic field shielding method by metallic sheets in wireless power transfer system. Energies 2016, 9, 733. [Google Scholar] [CrossRef]
- Zaheer, A.; Kacprzak, D.; Covic, G.A. A bipolar receiver pad in a lumped IPT system for electric vehicle charging applications. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 283–290.
- Huh, J.; Lee, S.W.; Lee, W.Y.; Cho, G.H.; Rim, C.T. Narrow-width inductive power transfer system for online electrical vehicles. IEEE Trans. Power Electron. 2011, 26, 3666–3679. [Google Scholar] [CrossRef]
- Miller, J.M.; Jones, P.T.; Li, J.M.; Onar, O.C. ORNL experience and challenges facing dynamic wireless power charging of EV’s. IEEE Circuits Syst. Mag. 2015, 15, 40–53. [Google Scholar] [CrossRef]
- Kim, S.; Park, H.H.; Kim, J.; Ahn, S. Design and analysis of a resonant reactive shield for a wireless power electric vehicle. IEEE Trans. Microw. Theory Tech. 2014, 62, 1057–1066. [Google Scholar] [CrossRef]
- Lee, J.Y.; Yoo, K.M.; Jung, B.S.; Chae, B.S.; Seo, J.K. Large air-gap 6.6 kW wireless EV charger with self-resonant PWM. Electron. Lett. 2014, 50, 459–461. [Google Scholar] [CrossRef]
- Hao, H.; Covic, G.A.; Boys, J.T. A parallel topology for inductive power transfer power supplies. IEEE Trans. Power Electron. 2014, 29, 1140–1151. [Google Scholar] [CrossRef]
- Ye, Z.; Jain, P.K.; Sen, P.C. Circulating current minimization in high-frequency AC power distribution architecture with multiple inverter modules operated in parallel. IEEE Trans. Ind. Electron. 2007, 54, 2673–2687. [Google Scholar]
- Borrega, M.; Marroyo, L.; Gonzalez, R.; Balda, J.; Agorreta, J.L. Modeling and control of a master–slave PV inverter with N-paralleled inverters and three-phase three-limb inductors. IEEE Trans. Power Electron. 2013, 28, 2842–2855. [Google Scholar] [CrossRef]
- Mohammadpour, A.; Parsa, L.; Todorovic, M.H.; Lai, R.; Datta, R.; Garces, L. Series-Input parallel-output modular-phase DC–DC converter with soft-switching and high-frequency isolation. IEEE Trans. Power Electron. 2016, 31, 111–119. [Google Scholar] [CrossRef]
- Namadmalan, A.; Moghani, J.S. Tunable self-oscillating switching technique for current source induction heating systems. IEEE Trans. Ind. Electron. 2014, 61, 2556–2563. [Google Scholar] [CrossRef]
- Kim, J.H.; Lee, B.S.; Lee, J.H.; Lee, S.H.; Park, C.B.; Jung, S.M.; Baek, J. Development of 1-MW inductive power transfer system for a high-speed train. IEEE Trans. Ind. Electron. 2015, 62, 6242–6250. [Google Scholar] [CrossRef]
- Miller, J.M.; Daga, A. Elements of wireless power transfer essential to high power charging of heavy duty vehicles. IEEE Trans. Transp. Electrification 2015, 1, 26–39. [Google Scholar] [CrossRef]
- Li, Y.; Mai, R.K.; Lu, L.W.; He, Z.Y. Active and reactive currents decomposition based control of angle and magnitude of current for a parallel multi-inverter IPT system. IEEE Trans. Power Electron. 2017, 32, 1602–1614. [Google Scholar] [CrossRef]
- Li, Y.; Mai, R.K.; Yang, M.K.; He, Z.Y. Cascaded multi-level inverter based IPT systems for high power applications. J. Power Electron. 2015, 15, 1508–1516. [Google Scholar] [CrossRef]
- Li, Y.; Mai, R.K.; Lu, L.W.; He, Z.Y. A novel IPT system based on dual coupled primary tracks for high power applications. J. Power Electron. 2016, 16, 111–120. [Google Scholar] [CrossRef]
- Li, Y.; Mai, R.; Lin, T.; Sun, H.; He, Z. A novel WPT system based on dual transmitters and dual receivers for high power applications: Analysis, design and implementation. Energies 2017, 10, 174. [Google Scholar] [CrossRef]
- Mai, R.K.; Li, Y.; Lu, L.W.; He, Z.Y. A power regulation and harmonic current elimination approach of parallel multi-inverter for supplying IPT systems. J. Power Electron. 2016, 16, 1245–1255. [Google Scholar] [CrossRef]
- Kawabata, T.; Higashino, S. Parallel operation of voltage source inverters. IEEE Trans. Ind. Appl. 1988, 24, 281–287. [Google Scholar] [CrossRef]
- Zhang, Y.; Duan, S.; Kang, Y.; Chen, J. The restrain of harmonic circulating currents between parallel inverters. In Proceedings of the CES/IEEE 5th International Power Electronics and Motion Control Conference (IPEMC 2006), Shanghai, China, 14–16 August 2006; pp. 1–5.
- Ye, Z.; Boroyevich, D.; Choi, J.Y.; Lee, F.C. Control of circulating current in two parallel three-phase boost rectifiers. IEEE Trans. Power Electron. 2002, 17, 609–615. [Google Scholar]
- Chen, J.F.; Chu, C.L. Combination voltage-controlled and current-controlled PWM inverters for UPS parallel operation. IEEE Trans. Power Electron. 1995, 10, 547–558. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Hang, L.; Uceda, J. Control of distributed uninterruptible power supply systems. IEEE Trans. Ind. Electron. 2008, 55, 2845–2859. [Google Scholar] [CrossRef] [Green Version]
- Kosaka, T.; Tanahashi, F.; Matsui, N.; Fujitsuna, M. Current zero cross detection-based position sensorless control of synchronous reluctance motors. In Proceedings of the 37th Industry Applications Society (IAS) Annual Meeting. Conference Record of the Industry Applications Conference, Pittsburgh, PA, USA, 13–18 October 2002; pp. 1610–1616.
- Nedeljkovic, D.; Ambrozic, V.; Nastran, J.; Hudnik, D. Synchronization to the network without voltage zero-cross detection. In Proceedings of the 9th Mediterranean Electrotechnical Conference (MELECON’98), Tel-Aviv, Israel, 18–20 May 1998; pp. 1228–1232.
- Ye, Z.; Lam, J.C.W.; Jain, P.K.; Sen, P.C. A robust one-cycle controlled full-bridge series-parallel resonant inverter for a high-frequency AC (HFAC) distribution system. IEEE Trans. Power Electron. 2007, 22, 2331–2343. [Google Scholar] [CrossRef]
- Hu, A.P. Selected Resonant Converters for IPT Power Supplies. Ph.D. Thesis, University Auckland, Auckland, New Zealand, 2001. [Google Scholar]
- Wei, X.; Zhu, G.; Lu, J.; Xu, X. Instantaneous current-sharing control scheme of multi-inverter modules in parallel based on virtual circulating impedance. IET Power Electron. 2016, 9, 960–968. [Google Scholar] [CrossRef]
- Guerrero, J.M.; De Vicuna, L.G.; Matas, J.; Miret, J.; Castilla, M. Output impedance design of parallel-connected UPS inverters with wireless load-sharing control. IEEE Trans. Ind. Electron. 2005, 52, 1126–1135. [Google Scholar] [CrossRef]
- Datasheetarchive. Available online: http://www.datasheetarchive.com/dl/Datasheets-UD1/DSAUD006800.pdf (accessed on 27 November 2016).
- Yuan, J.; Gao, F.; Gao, H.; Zhang, H.; Wu, J. An adaptive control strategy for parallel operated photovoltaic inverters. In Proceedings of the Power Electronics and Motion Control Conference (IPEMC), Harbin, China, 2–5 June 2012; pp. 1522–1526.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| The resistance of R2, R3, R7, R8/kΩ | 10 |
| The resistance of R1/Ω | 995.2 |
| The resistance of R4, R6, R13, R15/kΩ | 2.16 |
| The resistance of R5, R14/kΩ | 1.03 |
| The resistance of R9, R10/kΩ | 2 |
| The resistance of R11/kΩ | 1 |
| The resistance of R12/kΩ | 4.7 |
| The capacitance of C1/nF | 8 |
| The capacitance of C2, C5/uF | 2.67 |
| The capacitance of C3, C6/uF | 1 |
| The capacitance of C4/uF | 10 |
| Multiplier 1 and 2: MLT04 | |
| Operational amplifier A1–A5: LM6142 | |
| Parameters | Value |
|---|---|
| Inverter frequency f/kHz | 20 |
| Inductance of inverter 1 in series La1/μH | 445.0 |
| Capacitance of inverter 1 in series Ca1/nF | 143.3 |
| Inductance of inverter 1 in parallel Lb1/μH | 42.7 |
| Capacitance of inverter 1 in parallel Cb1/nF | 1476.0 |
| The connection inductance of inverter 1 Le1/μH | 60.9 |
| Inductance of inverter 2 in series La2/μH | 432.8 |
| Capacitance of inverter 2 in series Ca2/nF | 147.0 |
| Inductance of inverter 2 in parallel Lb2/μH | 43.6 |
| Capacitance of inverter 2 in parallel Cb2/nF | 1472.0 |
| The connection inductance of inverter 2 Le2/μH | 39.2 |
| Inductance of the primary coil LP/μH | 195.0 |
| Capacitance of primary circuit CP/nF | 323.7 |
| Mutual inductance M/μH | 60.0 |
| The air gap of the primary and secondary coils d/cm | 12 |
| Inductance of the secondary coil LS/μH | 507.34 |
| Capacitance of secondary circuit CS/nF | 124.8 |
| Equivalent resistance of the load RL/Ω | 10 |
| MOSFET: IRF640N | |
| RF: nRF24L01 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mai, R.; Lu, L.; Li, Y.; Lin, T.; He, Z. Circulating Current Reduction Strategy for Parallel-Connected Inverters Based IPT Systems. Energies 2017, 10, 261. https://doi.org/10.3390/en10030261
Mai R, Lu L, Li Y, Lin T, He Z. Circulating Current Reduction Strategy for Parallel-Connected Inverters Based IPT Systems. Energies. 2017; 10(3):261. https://doi.org/10.3390/en10030261
Chicago/Turabian StyleMai, Ruikun, Liwen Lu, Yong Li, Tianren Lin, and Zhengyou He. 2017. "Circulating Current Reduction Strategy for Parallel-Connected Inverters Based IPT Systems" Energies 10, no. 3: 261. https://doi.org/10.3390/en10030261