1. Introduction
In recent years, the application of microgrids in power system has drawn growing attention. A microgrid is characterized by flexibility, intelligence and compatibility. It is not only able to integrate the small-scale distributed renewable resources, but also helps to enhance the reliability and efficiency of the power system [
1]. There are two operation modes for the microgrid, namely grid-connected mode and islanded mode [
2,
3]. In the grid-connected mode, the microgrid usually provides ancillary service to the main power grid. In the islanded mode, the microgrid needs to keep the supply-demand balance by itself.
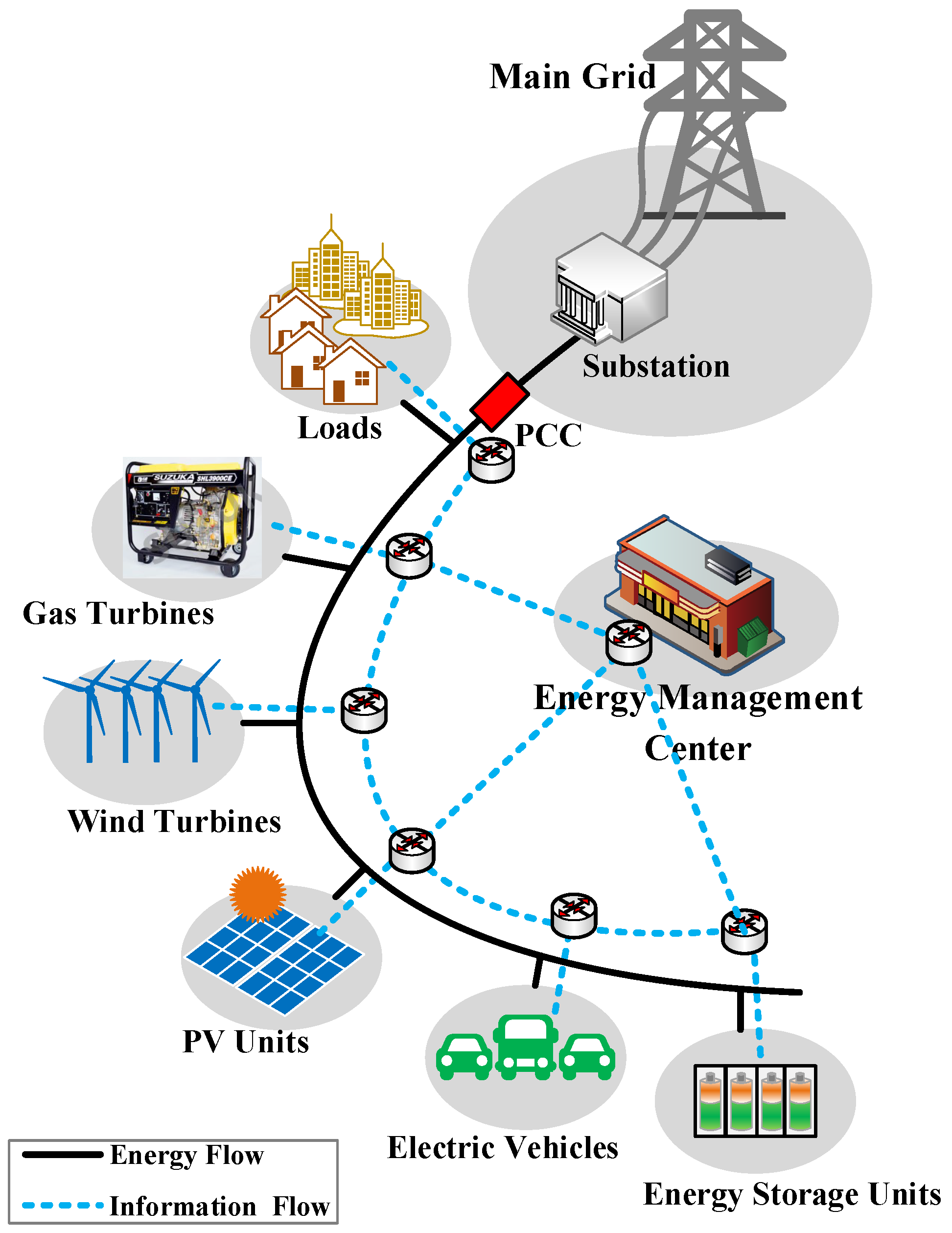
It is assumed that a microgrid comprises wind turbines (WTs), photovoltaic units (PVs) and gas turbines (GTs), energy storage units (ESUs), electric vehicles (EVs) and loads (see
Figure 1). In order to provide high-quality and economical electricity, the microgrid operation needs to be scheduled reasonably [
4]. As the brain of the microgrid, the energy management system (EMS) takes charge of coordinating the output power of the distributed resources and the exchanged power with the main grid to minimize the operational cost or maximize the total profits, according to the information from load prediction, power prediction of renewable energy and electricity price [
5,
6,
7]. As far as the architecture of EMS is concerned, there exist three kinds of structures: the centralized structure [
8], the hierarchical structure [
7,
9] and the distributed structure [
5,
10]. The authors in [
11] give a comprehensive review about the EMS of microgrids and summarize the recent state of the art in control structures, strategies and technologies for the multi-time-scale energy management of microgrids.
Power generation scheduling in the EMS plays an important role in the microgrid operation, which is used to dispatch various energy resources to meet the load demands at the minimum cost subject to the physical constraints of the microgrid [
12]. Generally speaking, the power generation scheduling of the microgrid involves economic dispatch (ED) and optimal power flow (OPF). In essence, both the ED and the OPF can be boiled down to the optimization issue.
In the past ten years, the optimization issue of the microgrid has been investigated by many researchers. In [
13], the authors present an optimization algorithm to minimize the total cost of buying power from multiple generations under the microgrid framework. In [
14], an optimization procedure is developed to make a schedule for the distributed generators and the storage in the microgrid to minimize the operating cost and the pollutant emission. For multiple interconnected microgrids, the authors in [
15] propose a pricing mechanism based on the potential game theory to study the anticipated benefits in an open market. Considering the users’ thermal comfort and the system constraints, the authors in [
16] propose an optimal day-ahead price-based power scheduling scheme for a community-scale microgrid for the purpose of maximizing the expected benefit and minimizing the operational cost. For a multi-microgrid interconnected system, the authors in [
7] present a two-level hierarchical optimization method. Under the hierarchical framework, the lower level and the upper level are responsible for an individual microgrid and the entire system, respectively. In [
17], the authors propose a hierarchical decision-making framework for a distribution company and a microgrid to optimize their respective objective in a cooperative manner. It should be noted that the uncertainties of renewable energies in microgrids have not been considered in the aforementioned works.
Comparing with the conventional power systems, more uncertainties will be confronted in the generation scheduling of a microgrid due to less accuracy in the prediction of small-scale renewable energies and load demands [
12,
18]. Recently, some researchers have studied the problems about the generation scheduling of microgrids considering the prediction uncertainties. Their works can be categorized into stochastic optimization, fuzzy optimization, robust optimization and interval optimization.
For the stochastic optimization for microgrid operation, some research works have been done in recent years. In [
19], the authors develop a cuckoo optimization algorithm to solve the stochastic unit commitment problem of microgrids. In [
20], the availability of distributed generators, energy storage units and responsive loads are studied through analyzing their uncertainty natures, and then, a stochastic optimization method based on Monte Carlo simulation is used to cope with the uncertainties. For a typical microgrid with a diesel generator, renewable energies and energy storage, the authors in [
21] present a probabilistic constrained approach to model the uncertainties of load and renewable power predictions and use stochastic dynamic programming to find the optimal day-ahead scheduling of the microgrid. In [
22], a hierarchical stochastic control scheme is proposed to coordinate the charging power of the plug-in electric vehicles and the wind power. In this scheme, the truncated Gaussian distribution is used to describe the uncertainty of wind power prediction. In [
23], the authors model the forecast errors of wind speed and solar irradiance using the probability distribution functions and then take the Latin hypercube sampling to generate the possible scenarios of renewable generation for day-head energy and reserve scheduling. It is known that the stochastic optimization approach relies on the accurate probability distribution functions of the uncertain variables. However, it is difficult for us to obtain the accurate probability distributions.
In fuzzy optimization methods, fuzzy variables are used to describe the uncertainties of optimization model, fuzzy sets are composed of all of the uncertain constraints, and the degree to meet constraints is defined as the membership function [
24]. Recently, the fuzzy optimization methods have been applied to microgrid scheduling preliminarily. For instance, the authors in [
25] present a fuzzy-logic expert system to handle uncertainties related to the forecasted parameters and the fuzzy operational environment of the microgrid. In the context of multi-objective optimization of the microgrid, the authors in [
26] propose a fuzzy decision approach to represent microgrid operators’ preferences in compromising between two objectives. As far as the fuzzy optimization methods are concerned, the fuzzy membership functions of the uncertainties often have some subjective arbitrariness since they are determined by decision-maker’s personal experience [
27].
To enhance the robustness of the generation scheduling, some researchers have studied several robust optimization methods. Considering the prediction errors of energy generation and consumption in a long time scale, the authors in [
28] present a robust multi-objective scheduling approach for dispatching distributed energy resources in the microgrid. In [
29], the authors present a robust optimization method to deal with the uncertainty of wind power output and provide a robust unit commitment schedule in the day-ahead market. The authors in [
30] propose a robust distributed economic dispatch approach for a grid-connected microgrid with high-penetration renewable energy and optimize the worst-case transaction cost stemming from the uncertainties of the renewable energy. In [
31], the authors present a multi-level robust optimization model for an energy-intensive corporate microgrid to minimize the unbalance cost in the worst case considering the uncertainties of loads. To save the cost and reduce the emission, the authors in [
32] develop a multi-objective robust planning approach for the microgrid with the consideration of multiple uncertainties during operation, for the purpose of calculating the worst-case cost among possible scenarios. The authors in [
33] develop a robust EMS for a microgrid under the mathematical framework of model predictive control, in which a fuzzy prediction interval model is used to describe the uncertainties of the renewable energy sources. Though the robust optimization methods do not require the explicit probability distribution functions of the uncertain variables, the obtained generation scheduling strategy tends to be conservative.
As we know, it is easier in practice to determine the upper and lower bounds of an uncertain variable than to obtain its probability distribution function. Mathematically, an interval is usually used to describe an uncertain variable whose upper-lower bounds are known [
34,
35]. Recently, the interval optimization for the generation scheduling of power system has drawn increasing attention. For example, the authors in [
36,
37] present an interval-based optimization method to solve the unit commitment problem of the power system considering the uncertainties of distributed energy resources and loads. The authors in [
38] adopt intervals to describe the uncertainty of load prediction in the linear economic dispatch model and then formulate the optimistic and pessimistic solution. In [
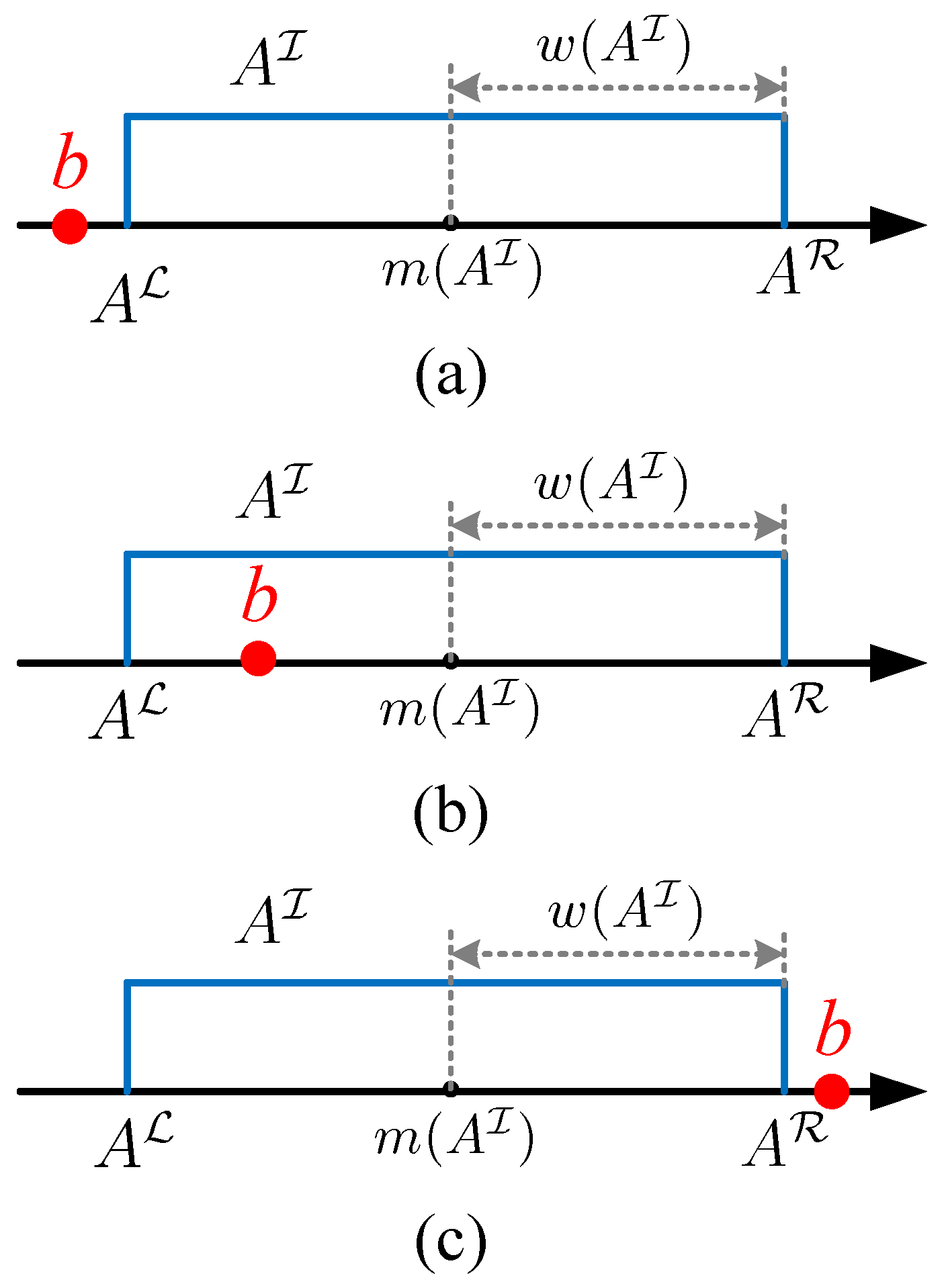
39], the authors propose an improved interval optimization method based on differential evolution for dynamic economic dispatch to minimize the economic and environmental costs of a microgrid. Comparing robust optimization with interval optimization, we can draw the differences between them. The robust optimization is to achieve the optimal decision under the worst case of uncertain parameters. Therefore, the solution of the robust optimization has good robustness against uncertainties, but it has much conservativeness, as well. The interval optimization uses the intervals to describe the uncertain parameters in objective function and constraints. The solution of the interval optimization is related to the possibility degree that the interval constraints are satisfied. In general, the bigger the possibility degree the decision-maker chooses for the constraints, the better the robustness of the solution the decision-maker obtains, but the more conservativeness the decision-maker needs to bear, and vice versa. In comparison with the robust optimization, the interval optimization is very flexible, though it has some subjectivity.
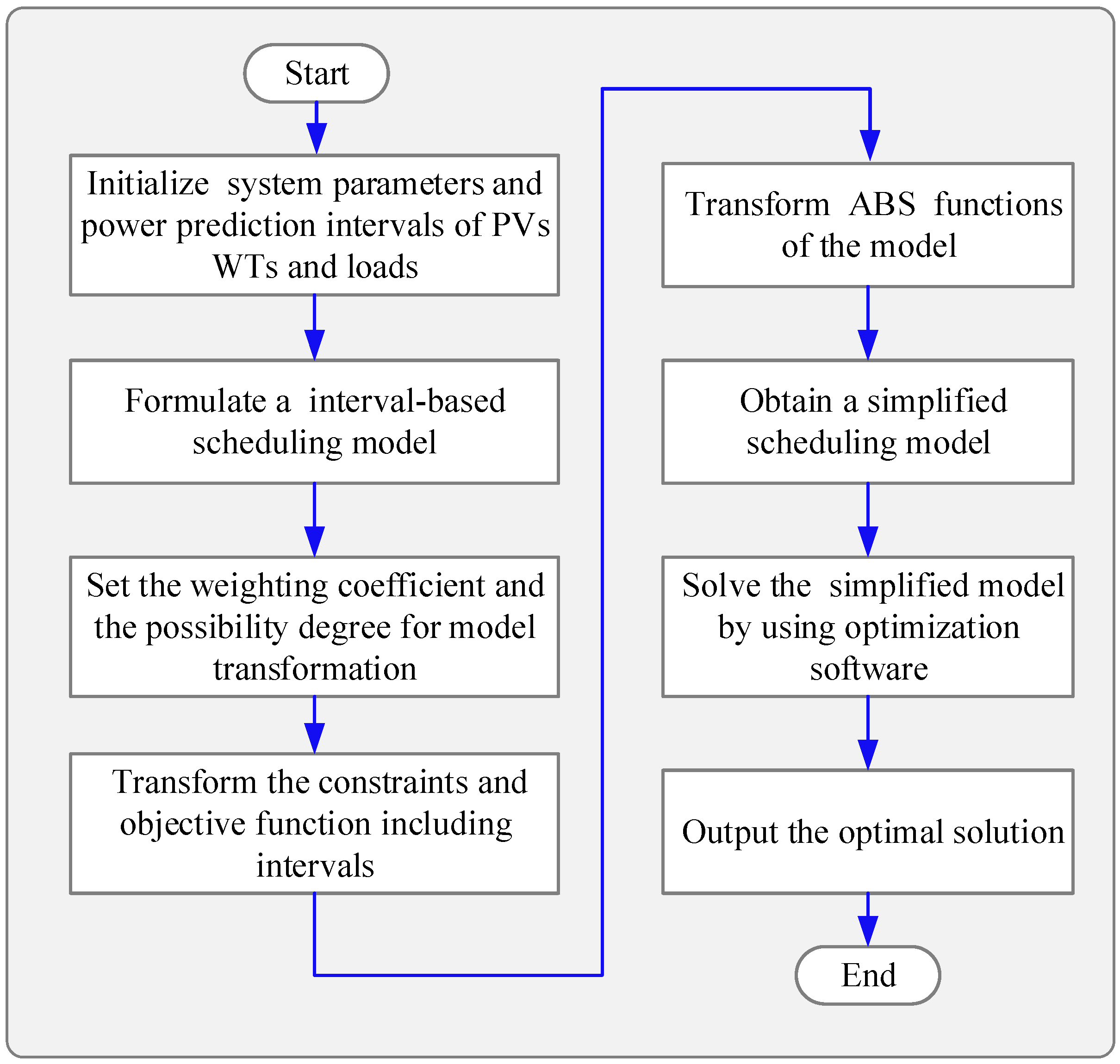
This paper focuses on the optimal day-ahead scheduling problem for a microgrid with multiple distributed energy resources. The optimization objective is to maximize the profits of the microgrid operation by scheduling the active and reactive power of all of the controllable energy resources under the time-of-use price mechanism. In the optimization model, the uncertainties of renewable resource prediction and load prediction are modeled by using intervals. Meanwhile, a set of interval decision variables (active and reactive power output of a gas turbine) are designed to balance the fluctuations of the renewable energies in the microgrid. To facilitate solving the optimization model, the possibility degree comparison between an interval and a real number is adopted to simplify the objective function and the constraints. In addition, some slack variables and complementary conditions are introduced to eliminate the absolute-value function (ABS function). The solution of the optimization problem in this paper provides a schedule for the active and reactive power output of all of the controllable energy resources, as well as the possible profit interval and the expected optimal profit of the microgrid.
The rest of this paper is organized as follows.
Section 2 formulates a day-ahead scheduling model for the microgrid in which the interval variables are used to describe the uncertainties of the renewable resource and load prediction. In
Section 3, the mathematical transformations are adopted to eliminate the ABS functions and the interval variables of the scheduling model for reducing the model complexity. In
Section 4, the case studies on a typical microgrid are presented to demonstrate the effectiveness of the proposed method.
Section 5 draws the conclusions of this paper.
2. Scheduling Problem Formulation
This paper considers a kind of microgrid consisting of gas turbines (GTs), photovoltaic units (PVs), wind turbines (WTs), energy storage units (ESUs), electric vehicles (EVs) and a number of loads. For the microgrid, the power predictions of PVs and WTs have inevitable uncertainties, since the power of PVs and WTs is subject to the local weather conditions, such as irradiance, temperature and wind speed [
40]. In addition, load prediction is also inaccurate due to the randomness in load demand.
In this paper, intervals are adopted to describe the prediction values with uncertainties for PV power, WT power and load power, i.e.,
where the superscripts
,
and
denote an interval, left bound and right bound of the corresponding power prediction, respectively. Generally, it is easy for us to determine the left bound and right bound of the prediction interval by analyzing the historical predicted data and real data. Therefore, it is assumed in this paper that the bounds of the above prediction intervals in (
1) have been known in advance.
According to the power balance requirements of the microgrid, the power output of the controllable distributed resources should vary in a certain range to counteract the uncertainties of the PV power, WT power and loads. Here, the power outputs of GTs are selected to take the counteracting responsibility. Thus, the active power and the reactive power of a GT are designed to be two interval variables, i.e.,
where
and
denote the active and reactive power intervals of the GT, respectively. It should be noted that the power intervals
and
serve as decision variables, not uncertain parameters.
2.1. Objective Function
This paper concerns the grid-connected microgrid, which allows bidirectional power flow at the point of common coupling (PCC). This means that the microgrid operator is permitted to buy the short electricity from (or sell the spare electricity to) the main grid at any time. The objective of power generation scheduling can be to maximize the benefits or minimize the cost. Here, we take the maximum profits as the objective of the power generation scheduling for the microgrid.
Generally, the profits of the microgrid are equal to the total earnings minus the total costs. The objective function for the generation scheduling of the microgrid is formulated as:
where
and
denote the earnings and costs of the microgrid in the
time interval (1 h for each time interval), respectively;
T denotes the number of time intervals.
The earnings
are calculated by:
where
is the selling price;
is the buying price;
is the subsidy price from the government;
is the power, which is sold to the main grid;
is the number of PVs;
is the number of WTs.
The costs
are calculated by:
where
is the power, which is bought from the main grid;
is the total power loss of microgrid;
is the total cost of GTs;
is the total cost of ESUs;
is the total cost of EVs.
As we know, for a grid-connected microgrid, selling electricity to the main power grid and buying electricity from the main power grid cannot occur at the same time. Therefore, to avoid this phenomenon appearing in the objective function, the sold power and the bought power at the
time interval can be expressed as follows:
where
denotes the actual power at the PCC (the direction of power flow is from the main grid to the microgrid). Obviously,
implies the selling-electricity transaction, otherwise implying the buying-electricity transaction.
For the microgrid with
buses, the total active power loss is calculated as follows [
41]:
where
and
denote the voltage at bus
i and bus
j, respectively;
denotes the phase difference between bus
i and bus
j;
and
are the real component and the imaginary component of the complex admittance matrix elements
, respectively;
is the resistance of the line between bus
i and bus
j.
Assuming that the operational cost of a GT is proportional to the active power output, then the total costs of all of the GTs can be calculated by:
where
and
are the active power interval and the cost coefficient of the
g-th GT, respectively;
is the number of GTs.
The operational cost of an ESU is mainly related to the charging times of its storage battery. The cost of an ESU for per charging/discharging cycle can be calculated by:
where
is the investment cost for the
s-th ESU and
is the total charging/discharging cycles. In the
t-th time interval, the total operational cost of all of the ESUs can be calculated by:
where
;
and
are the active power and the rated capacity of the
s-th ESU, respectively;
is the number of ESUs.
Similarly, the total operational cost of all of the EVs in the
t-th time interval is:
where
;
and
are the active power and the rated capacity of the
v-th EV, respectively;
is the number of EVs.
2.2. Operational Constraints
The optimal generation scheduling of microgrid operation is to maximize the profits on the premise that all of the operational constraints of the system are satisfied.
2.2.1. Constraints of Power Flow Balance
The microgrid operation needs to meet the power flow constraints. The power flow equations at the
i-th bus are given as follows [
42]:
where
and
are the real component and the imaginary component of the complex admittance matrix elements
.
and
are the injected active and reactive power at bus
i, respectively, which can be expressed as follows:
where
,
,
,
,
,
and
denote the active power outputs of PCC, GTs, WTs, PVs, ESUs, EVs and loads at bus
i, respectively;
,
,
,
,
,
and
denote the reactive powers of PCC, GTs, WTs, PVs, ESUs, EVs and loads at bus
i, respectively.
2.2.2. Constraints of Bus Voltage
The voltage at each bus is required not to exceed the prescribed bounds. Therefore, the constraint of voltage at bus
i is given by the following inequality:
where
and
are the lower bound and the upper bound, respectively.
2.2.3. Constraints of Power Exchange at PCC
The exchanged active and reactive power between the microgrid and the main grid at PCC need to meet the following constraints:
where
,
,
and
denote the minimum and maximum values of the exchanged active and reactive power at PCC, respectively.
2.2.4. Constraints of WTs and PVs
The constraints for the reactive power of WT and PV are given as follows:
where
,
,
and
denote the minimum and maximum values of the reactive power of the
w-th WT and the
p-th PV, respectively.
2.2.5. Constraints of GTs
The constraints for the active and reactive power outputs of the
g-th GT are given as follows:
where
,
,
, and
denote the minimum and maximum values of the active and reactive power of the
g-th GT, respectively.
2.2.6. Constraints of ESUs
The ESU operation is required to meet the following constraints:
where the inequalities (
18)–(
20) represent constraints of the active power capacity, reactive power capacity and energy capacity of the ESU, respectively; the equality (
21) denotes the charging/discharging energy balance; the equality (
22) denotes the energy balance between the initial and the final state of charge (SoC).
and
denote the minimum and the maximum values of the active power of the
s-th ESU, respectively;
and
denote the minimum and the maximum values of the reactive power of the
s-th ESU, respectively;
and
denote the minimum and the maximum values of the energy of the
s-th ESU, respectively.
2.2.7. Constraints of EVs
For the vehicle-to-grid EVs, at the grid-connected time, the operational constraints are similar to the ones of the ESUs, i.e.,
where
denotes the set of all of the grid-connected time intervals.
To satisfy the traveling requirements in the morning and afternoon, the energy of EVs should be adequate for departing from and returning to the charging station. Therefore, at the departing time, the energy of EVs should meet the minimum energy constraints:
where
denotes the required minimum energy for the
v-th EV traveling;
and
denote the departing time in the morning and afternoon, respectively.
Assuming that the EV returns to the charging station after
k hours, the residual energy of the EV at the returning time can be calculated by:
where
denotes the average traveling power of each EV;
and
denote the returning time in the morning and afternoon, respectively.
By combining the above objective function and constraints, we obtain the day-ahead scheduling model of the microgrid operation. In the scheduling model, there exist some interval variables and ABS functions, which increase the complexity of the model.
4. Case Studies
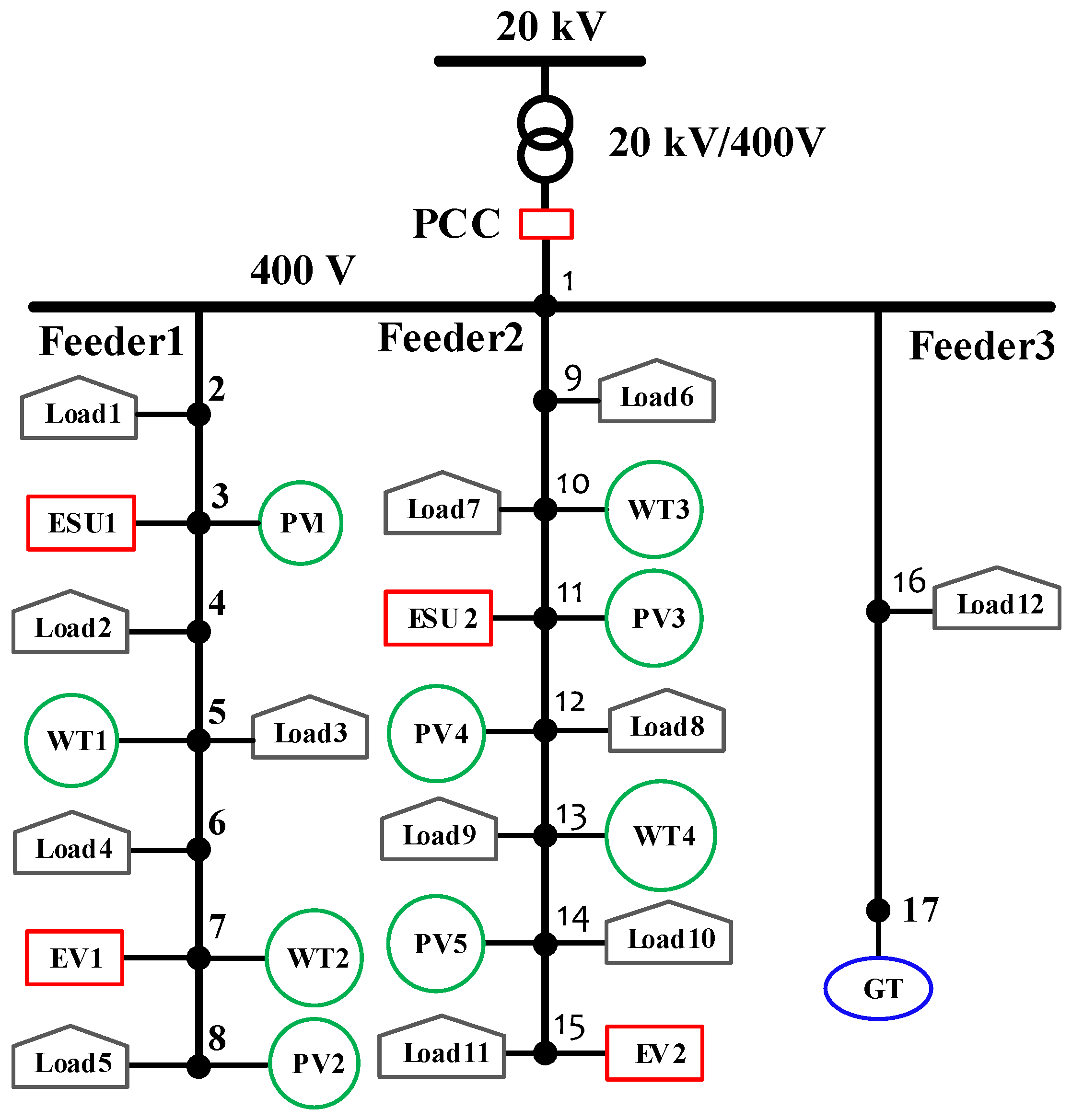
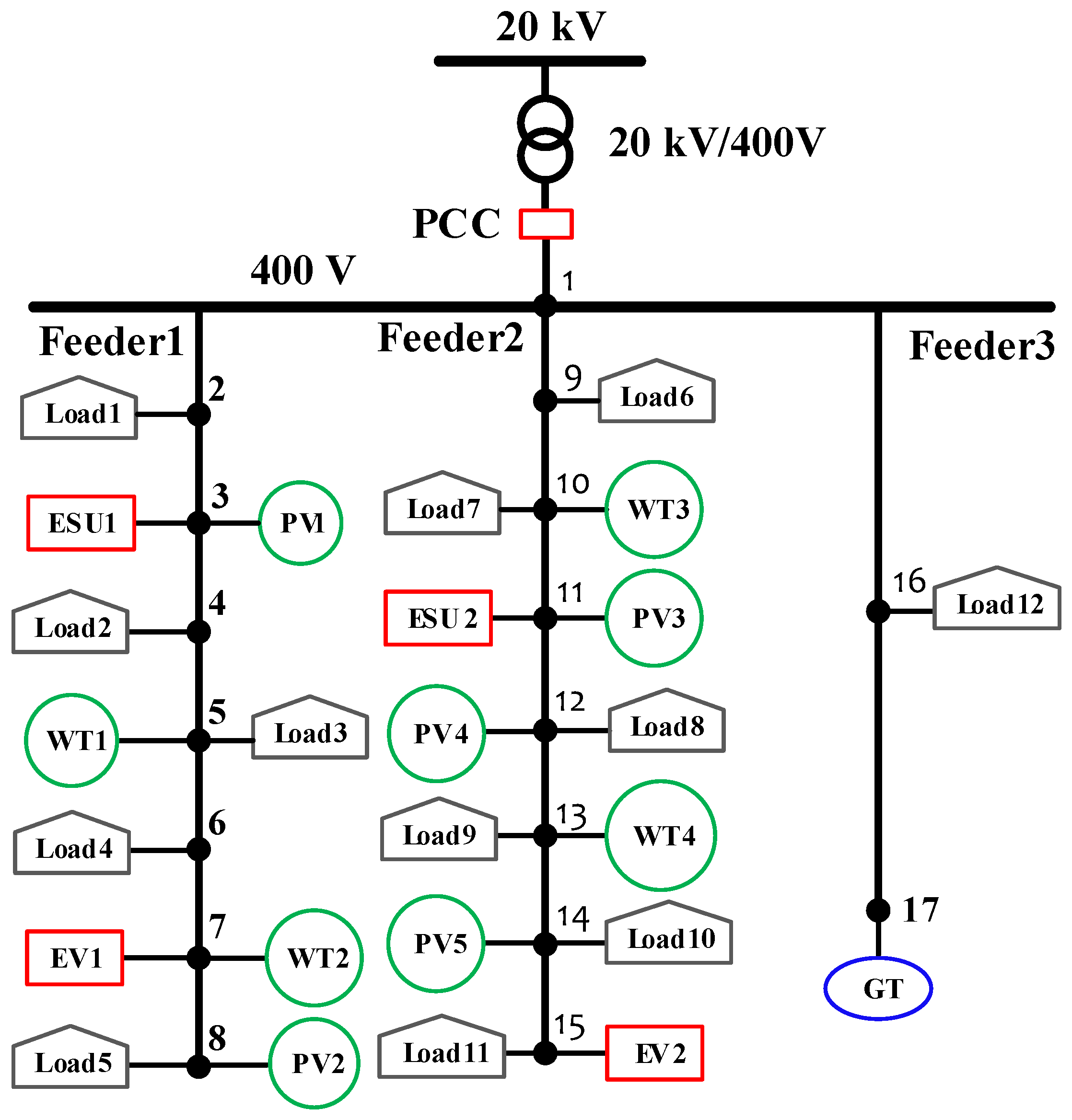
In this section, a microgrid test system, which is modified from the benchmark LVnetwork in the EU project “Microgrid” [
45], is used to test the proposed scheduling method. The single-line diagram of the microgrid test system is shown in
Figure 4.
In the test system, the impedance parameters of the network lines (120 mm Al XLPEtwisted cable) are given as: , and pole-to-pole distance .
The loads on Feeder 1 represent residential power consumption, while the loads on Feeders 2 and 3 represent industrial power consumption. The rated apparent power (
) and power factor (
) of the loads are listed in
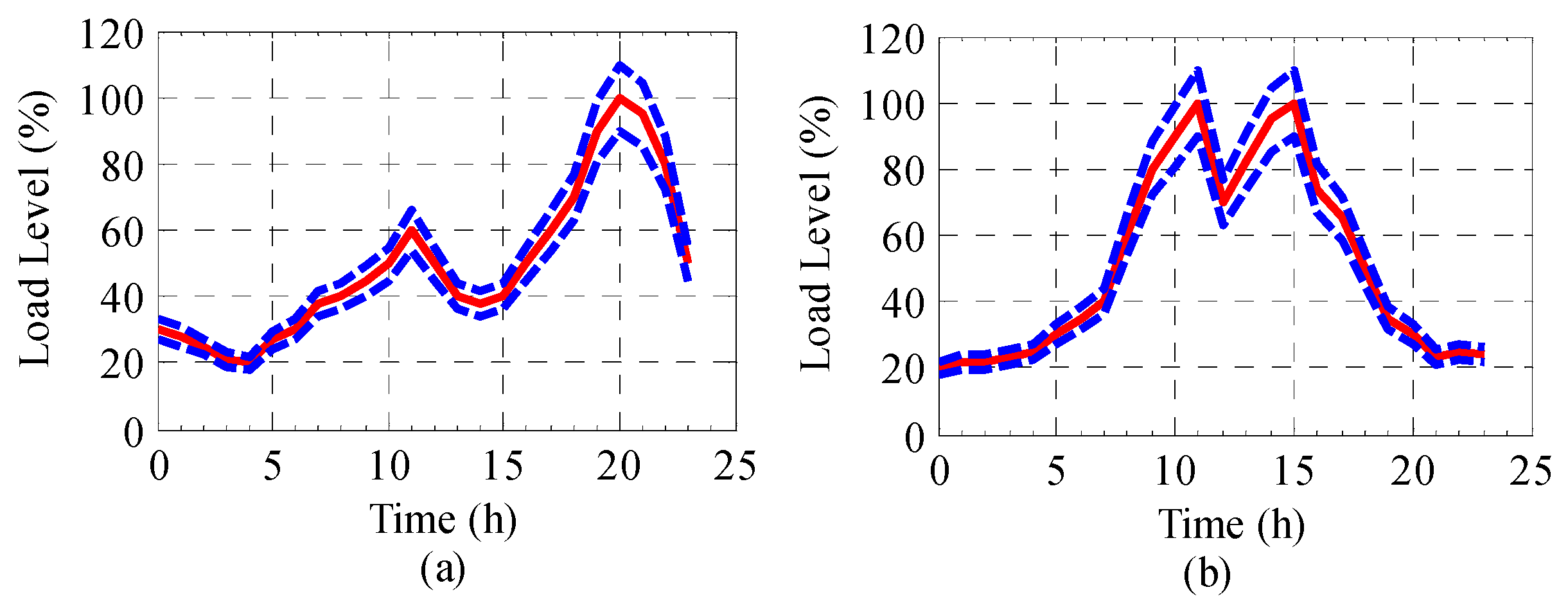
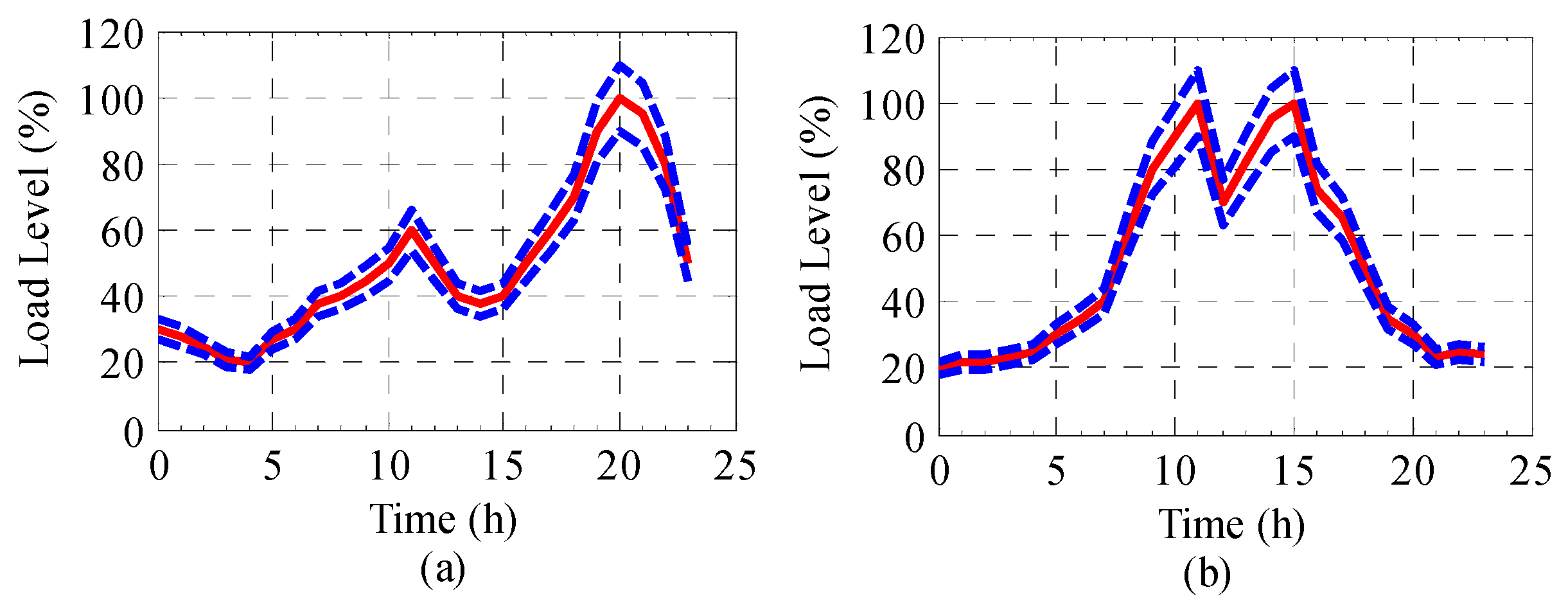
Table 1, and the prediction intervals of loads in 24 h are shown in
Figure 5. The load prediction error is assumed to be
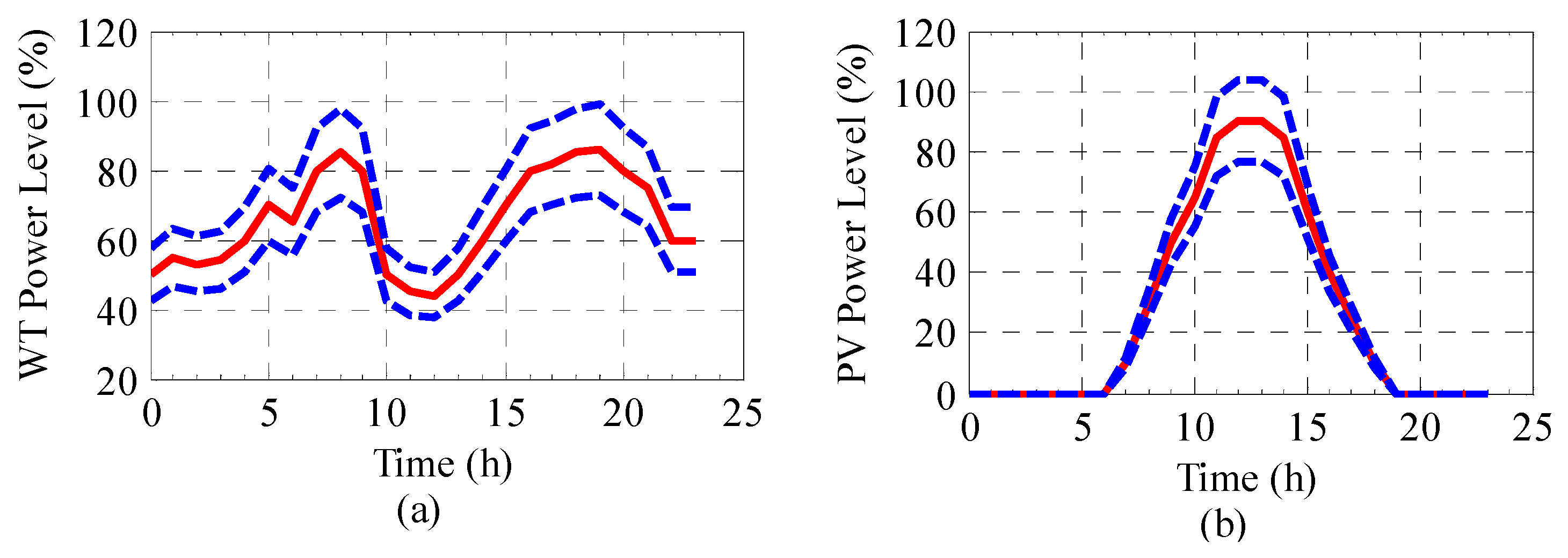
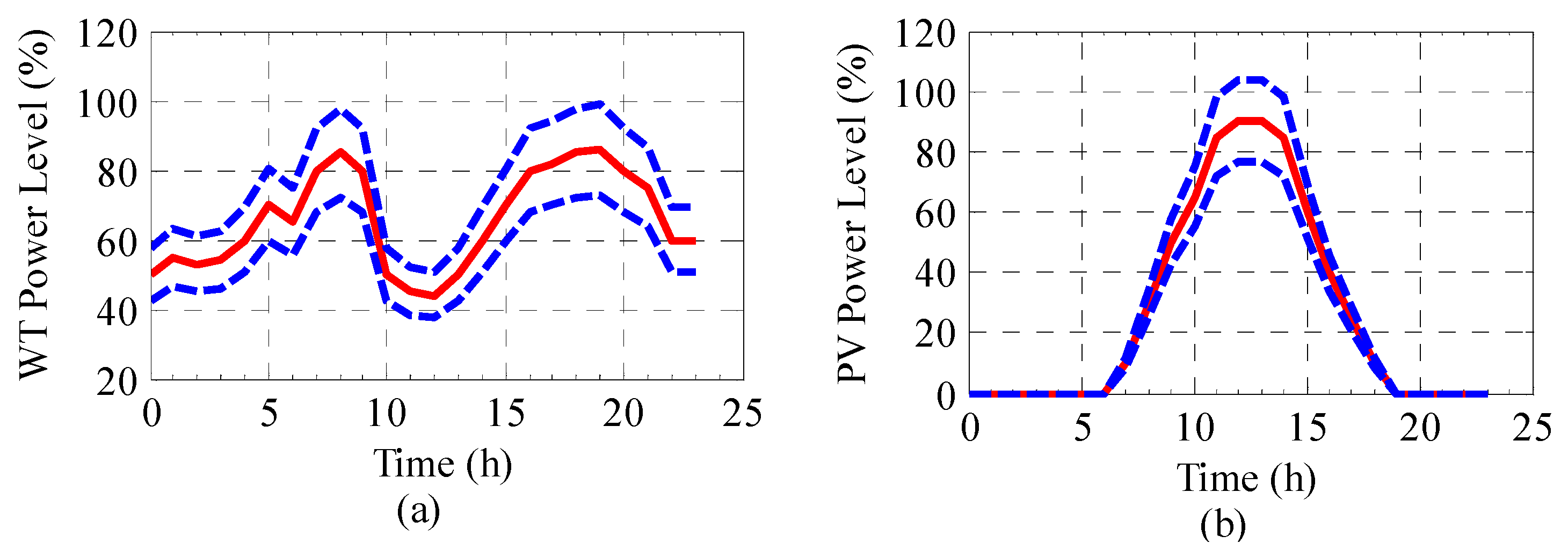
of the prediction value (midpoint). The parameters of PVs and WTs are given in
Table 2, and the power prediction intervals in 24 h are shown in
Figure 6. The power prediction error of PVs and WTs is assumed to be
of the prediction value (midpoint). The parameters of ESUs, EVs and GT are given in
Table 3.
The day-ahead price information from the electricity market is given in
Table 4. In the tests, it is assumed that the traveling time of EVs is two hours (8:00–9:00 and 17:00–18:00), the average traveling power of EVs is
, and the required minimum energy for EV traveling is
. Thus, the corresponding parameters of each EV for the simulations are set as:
,
,
,
,
,
and
.
For guaranteeing the voltage quality, the allowed deviation of all of the bus voltage is limited to of the rated value.
The scheduling strategy is affected by the weighting coefficient (
) of the objective function, the possibility degree (
) of the interval equality constraints (
13) and the possibility degree (
) of the interval inequality constraints (
17). In order to reduce the difficulty in analysis, the possibility degree of the interval inequality constraints is fixed to
, which means that the scheduling strategy completely satisfies the interval inequality constraints. In other words, the decision-maker is absolutely pessimistic about the interval inequality constraints (
17).
The numerical simulations are performed with different values of
and
, and the corresponding profit intervals of the microgrid are listed in
Table 5. From the results, we can see that with the same weighting coefficient (
), as the possibility degree (
) increases, the midpoint, the width and the expected value of the profit interval increase. The bigger possibility degree (
) means that the decision-maker expects the more power output of renewable resources and the higher load level to increase the profits, at the cost of the bigger risk on the prediction uncertainties. If the decision-maker fixes a small possibility degree (
), as the weighting coefficient (
) increases, the midpoint and the width of the profit interval barely change, but the expected profit decreases since the objective function (
45) is inversely proportional to the weighting coefficient (
).
Table 6 lists the iterations and the computation time for solving the optimization model. From the comparative results, we can see that the computation time is reduced significantly after the ABS functions are removed.
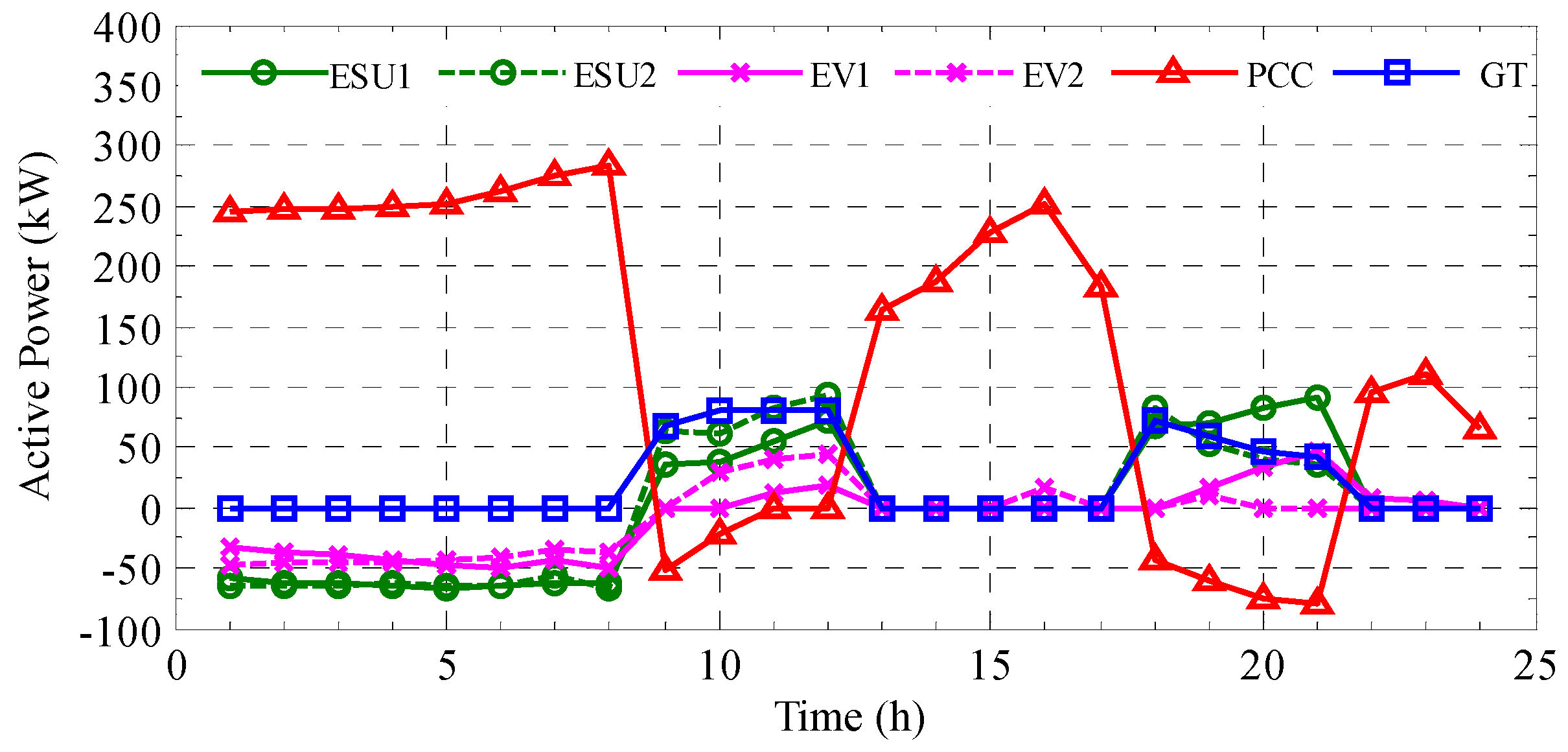
Figure 7 shows the scheduling strategy for the active power of all of the controllable resources. From the results, we can see that the ESUs and the EVs are charged in a low-price time and discharged in a high-price time. In this way, the ESUs and the EVs generate profits by taking advantage of the time-of-use price. It is worthy to note that the active power of the EVs is zero at 08:00 and 17:00 since the EVs are not at the charging station. Seeing the active power curve of PCC, we can find that the microgrid purchases the electricity from the main grid in low-price or mid-price periods (
) and sells the electricity to the main grid in high-price periods (
). The GT outputs active power in the high-price periods (08:00–12:00 and 17:00–21:00) because only in these periods, the electric price is higher than the cost. Here, it should be noted that the active power
of GT degenerates into a real number to reduce the uncertainty of the profits, though
is originally designed to be an interval decision variable.
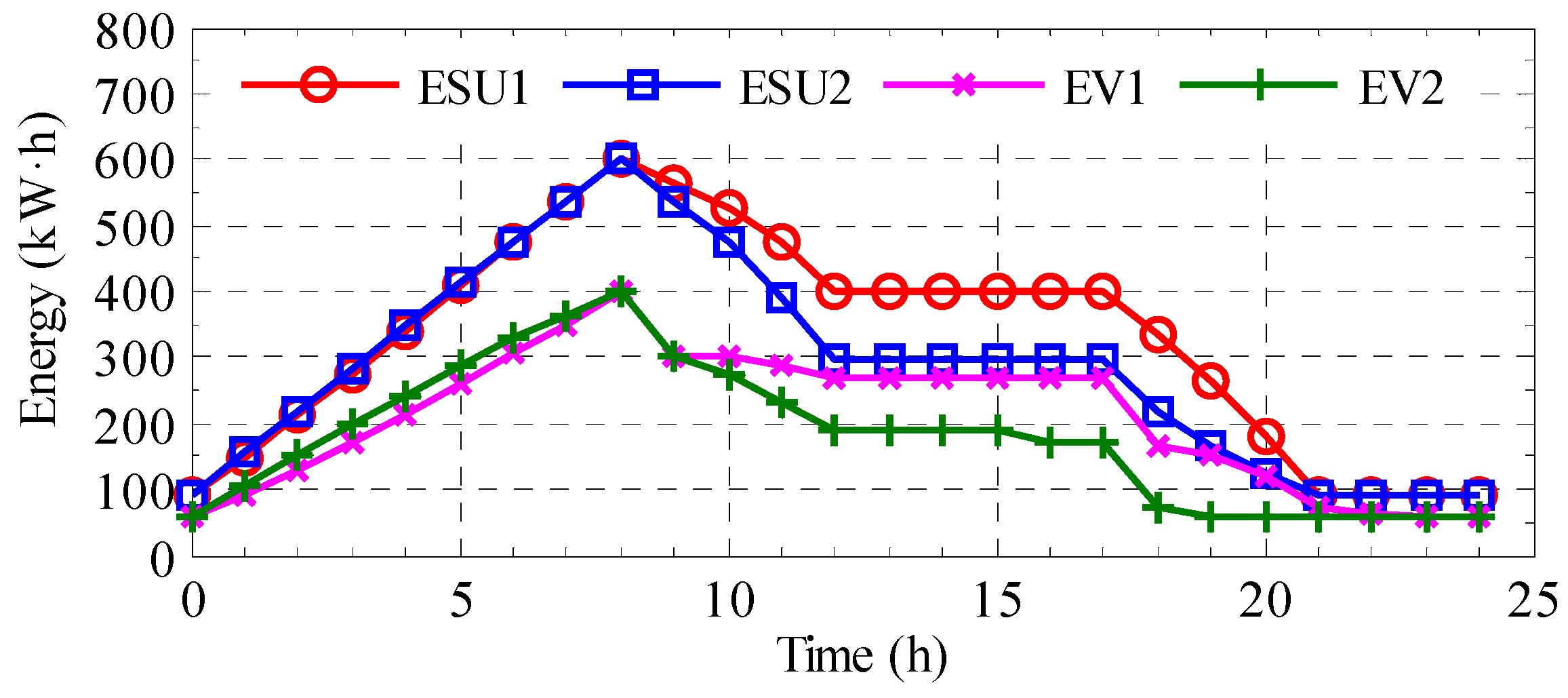
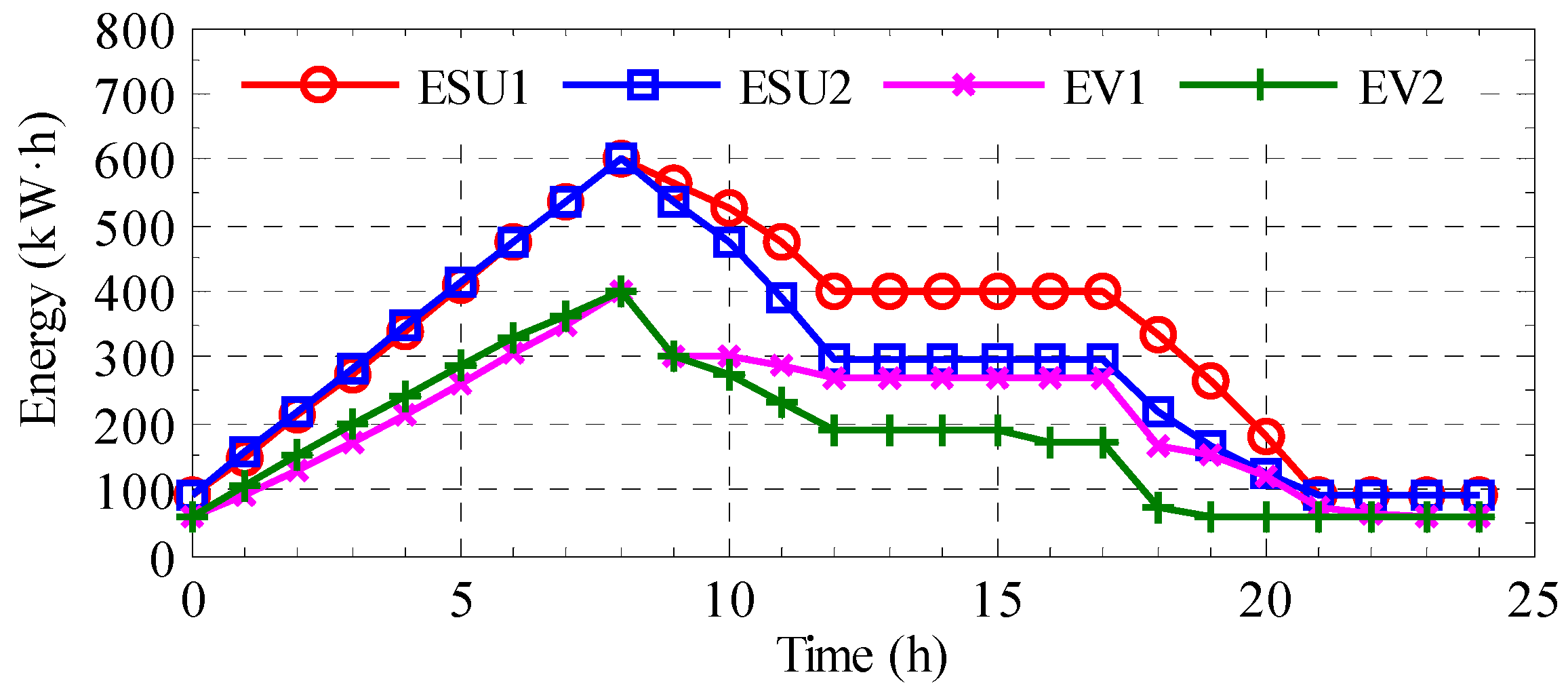
The residual energy curves of ESUs and EVs in 24 h are shown in
Figure 8. The initial energies of ESUs and EVs are 90 kWh and 60 kWh, respectively. At 08:00, ESUs and EVs are fully charged; in the high-price periods, ESUs and EVs feed their power to the grid; at the end of a day, the residual energies of ESUs and EVs drop to the initial values, which means that the energies in ESUs and EVs are kept balanced in a whole day.
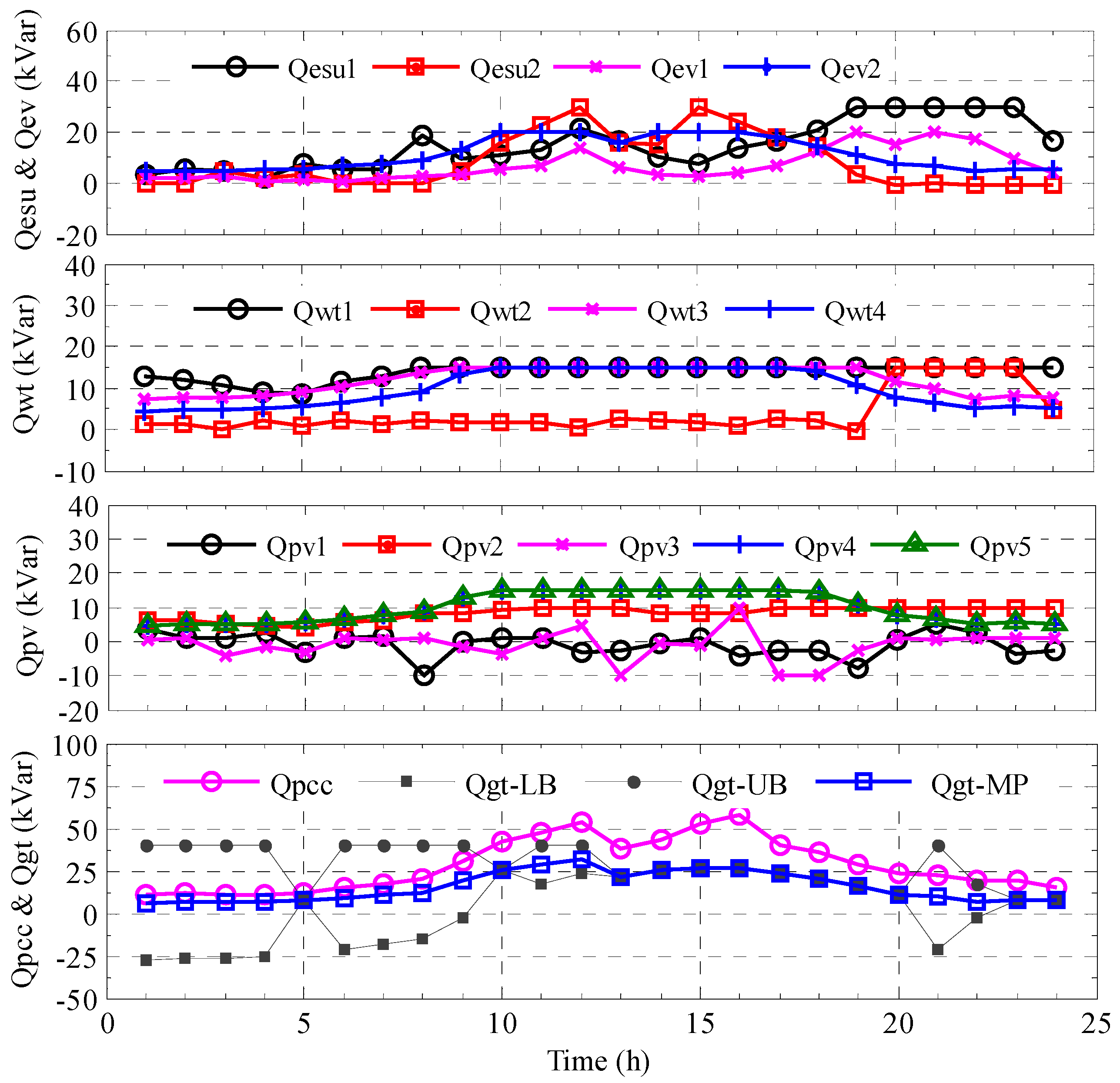
Figure 9 shows the reactive power of ESUs, EVs, WTs, PVs, PCC and GT in 24 h. The reactive power outputs of the controllable resources are adjusted in different periods to keep all of the bus voltages in the allowed range and reduce the active power loss of microgrid. It can be found from the results that PV1 and PV3 absorb excess reactive power on Bus 3 and Bus 11, while the rest of the resources provide the reactive power for the microgrid. Here, it should be noted that the reactive power of PVs is nonzero in the periods without sunlight (before 6:00 a.m. and after 19:00 p.m. in a day), though the active power of PVs is zero; see
Figure 6b. The reason is that in these periods, the PV converter serves as a static var generator (SVG) whose reactive power output does not depend on sunlight. Therefore, the PV converter can generate reactive power in 24 h. As mentioned earlier, the reactive power
of GT is designed to be an interval decision variable for coping with the reactive power uncertainties of loads. The lower bound, the upper bound and the midpoint of
are shown in the fourth subfigure of
Figure 9. It can be seen that the width of
varies in different periods, and the widest interval reaches [−26, 28] kvar.
The bus voltages in 24 h are shown in
Figure 10. It can be seen that all of the bus voltages stay in the prescribed range, which means that the optimal scheduling scheme can guarantee the voltage quality of the microgrid.
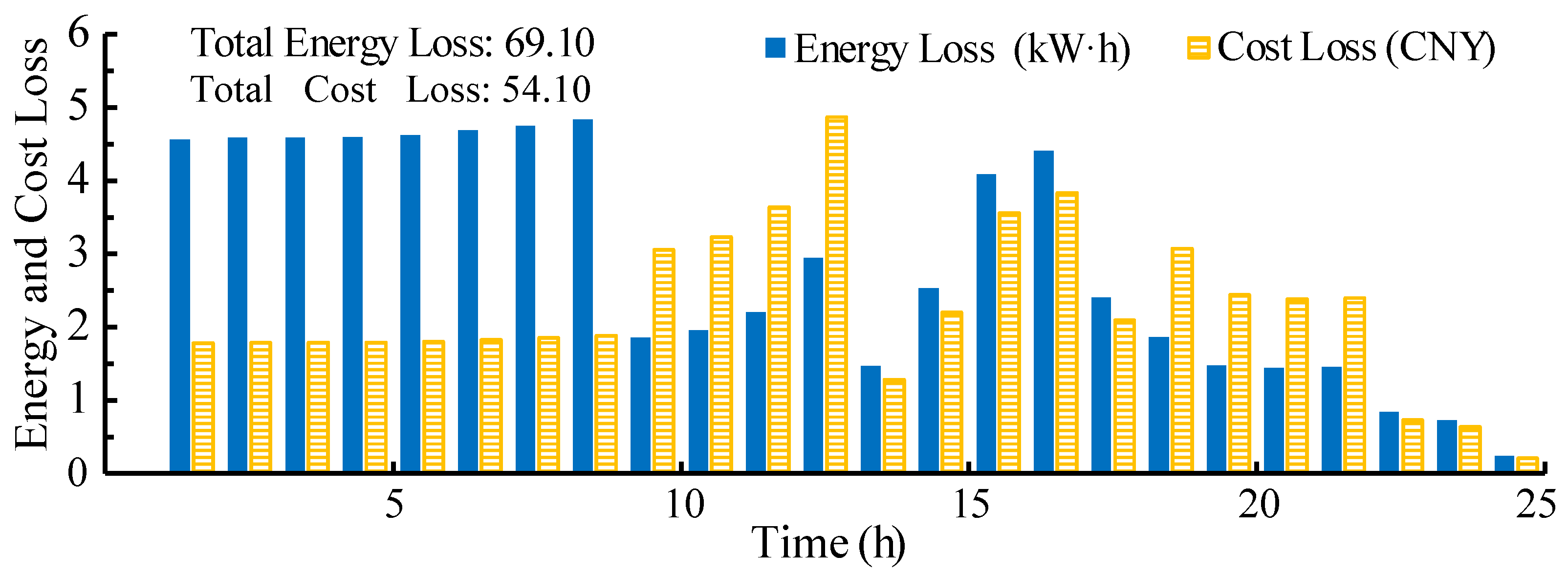
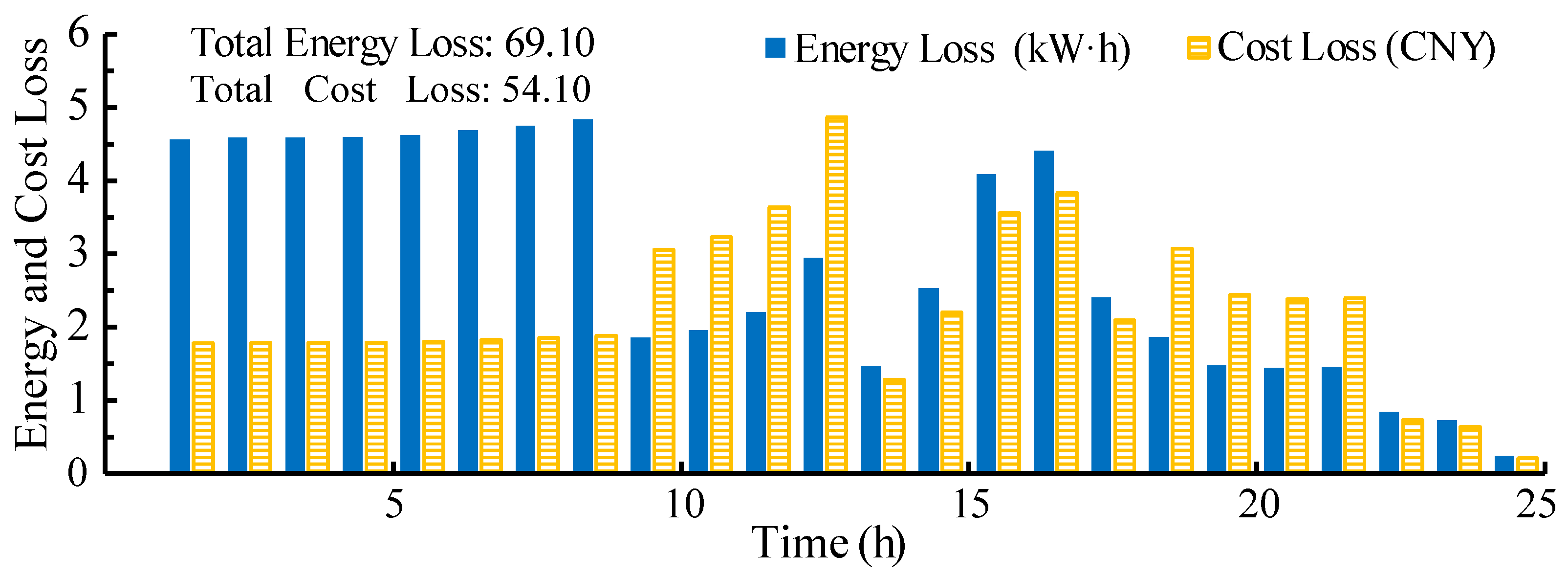
The energy loss and the cost loss of the whole microgrid are illustrated in
Figure 11. From the results, we can find that the energy loss in 0:00–8:00 is higher than that in other periods. The reason is that in 0:00–8:00, the amount of power flows from the main grid into the microgrid through distribution lines to feed ESUs, EVs and loads, and thus, the energy loss on the distribution lines is relatively high. By contrast, in other periods, the transmission loss is reduced greatly, since much power demand is balanced locally. From the cost loss statistics, it can be seen that the cost loss in the high-price periods is high, because the cost loss is equal to the product of the energy loss and the electric price.
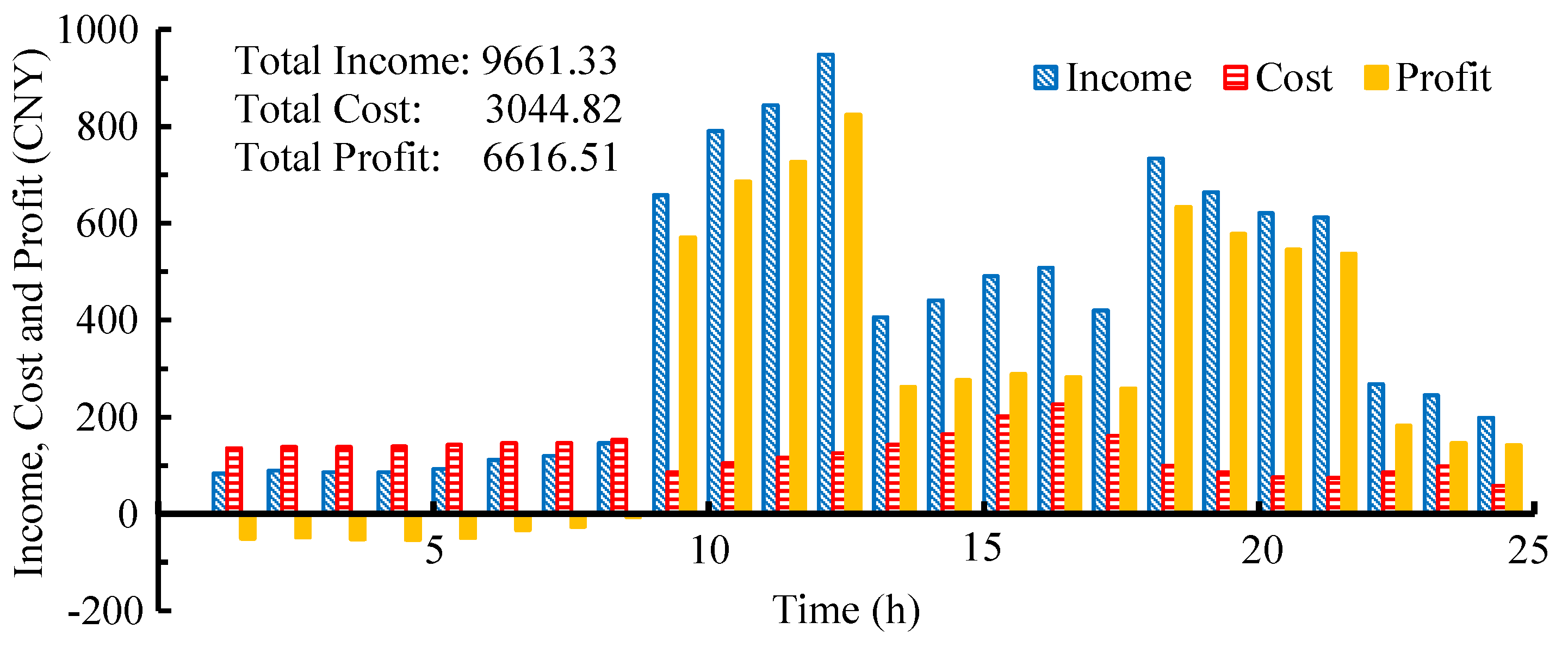
Figure 12 shows the income, the cost and the profits of the microgrid. It is illustrated that the profits are gained in the high-price and mid-price periods. In these periods, the profits consist of the electricity sales of ESUs, EVs, WTs, PVs, as well as the government’s subsidies to the renewable energy. It should be noted that the profits in 0:00–08:00 are negative, since a large amount of power is purchased from the main grid to charge ESUs and EVs in this period.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}