
Effects of Energy Storage Systems Grid Code Requirements on Interface Protection Performances in Low Voltage Networks

 ,
, 
 ,
,
Abstract
:1. Introduction
- The forecasted decreasing cost of storage systems, as a consequence of its near future diffusion involving increased production capacity;
- Economic advantages for active end-users, enabling the optimal self-consumption of locally produced energy, alternatively to incentivizing mechanisms (e.g., net metering, expected to end soon, at least in Italy);
- Leveling the DG power production, both in terms of daily peak shaving function, e.g., for PV generators, and in short times, to mitigate the perturbations of renewable sources as in the case of WTs;
- Opportunities in the participation of end-users to ancillary services markets, even if they integrate partially unpredictable energy sources;
- Contribution in supplying the load peak power, reducing the contractual value of admitted power absorption and consequently a consistent portion of the end-user bill (since network operation costs, evaluated on the rated power of the connection, are foreseen to increase in the coming years); and
- Local supply of end-users in the case of distribution network outage.
2. Present Italian Standard Requirements for DG
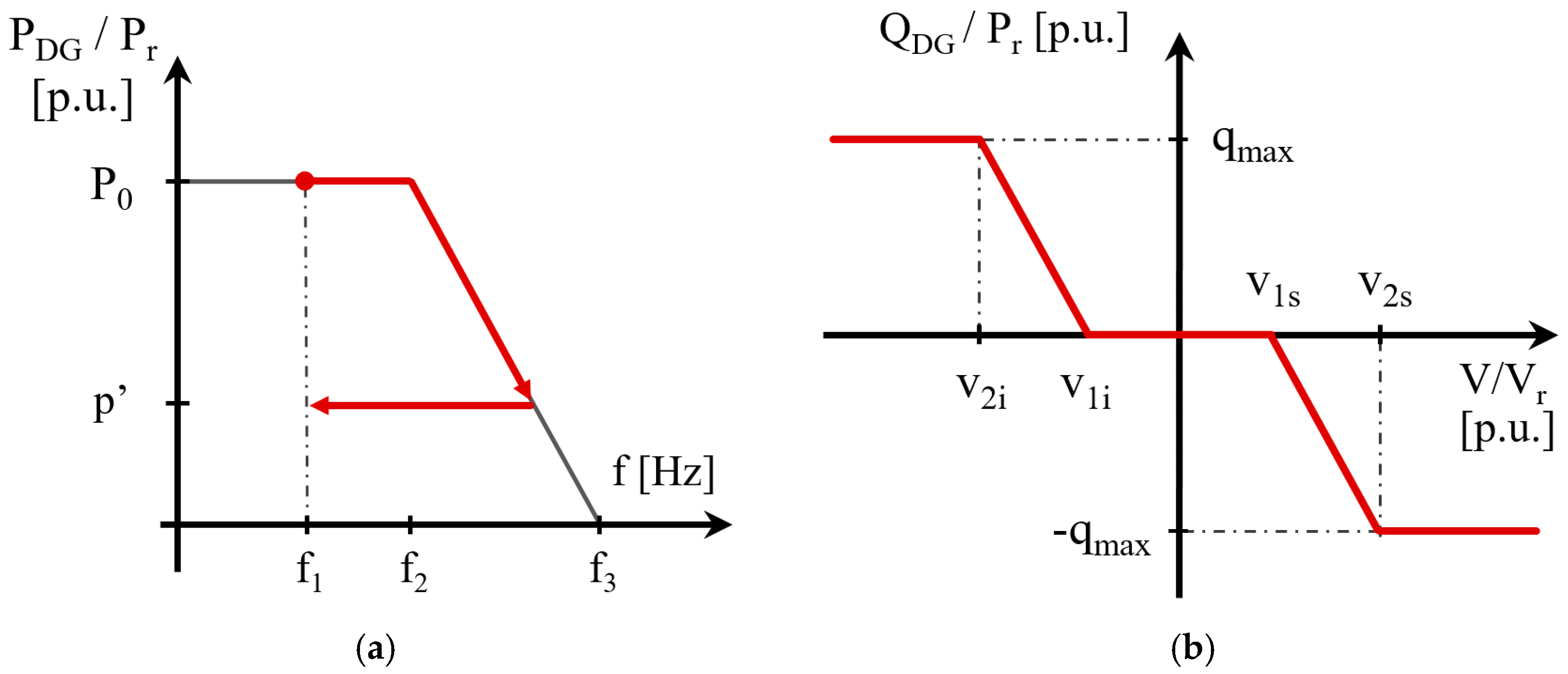
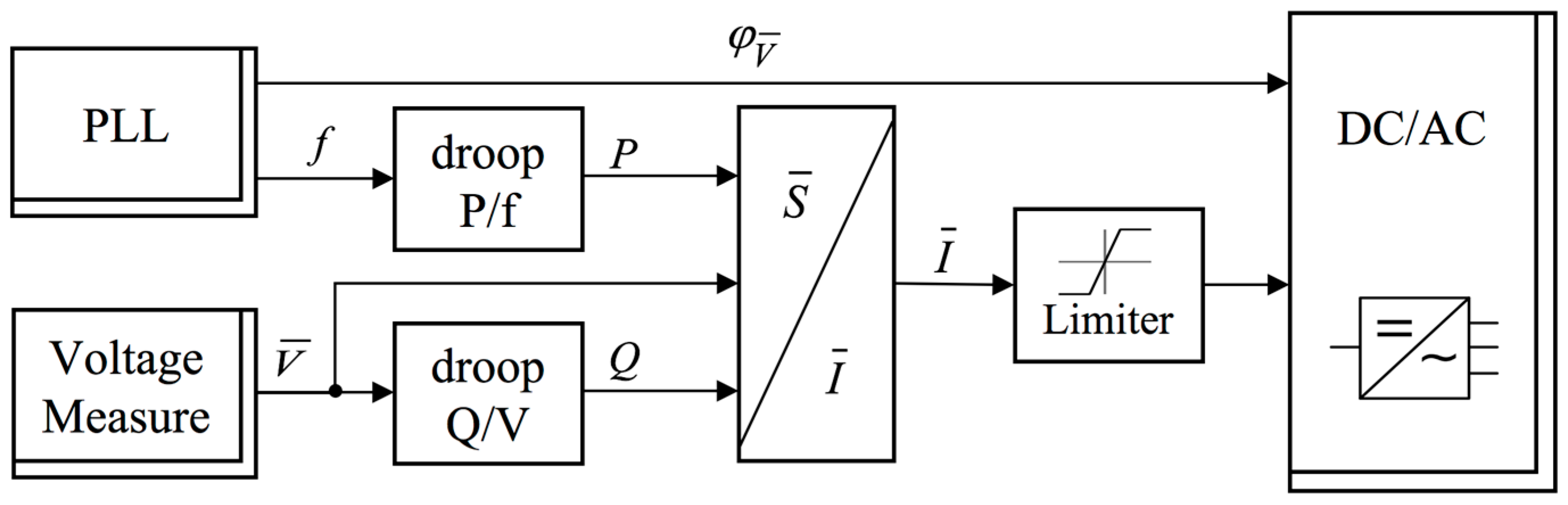
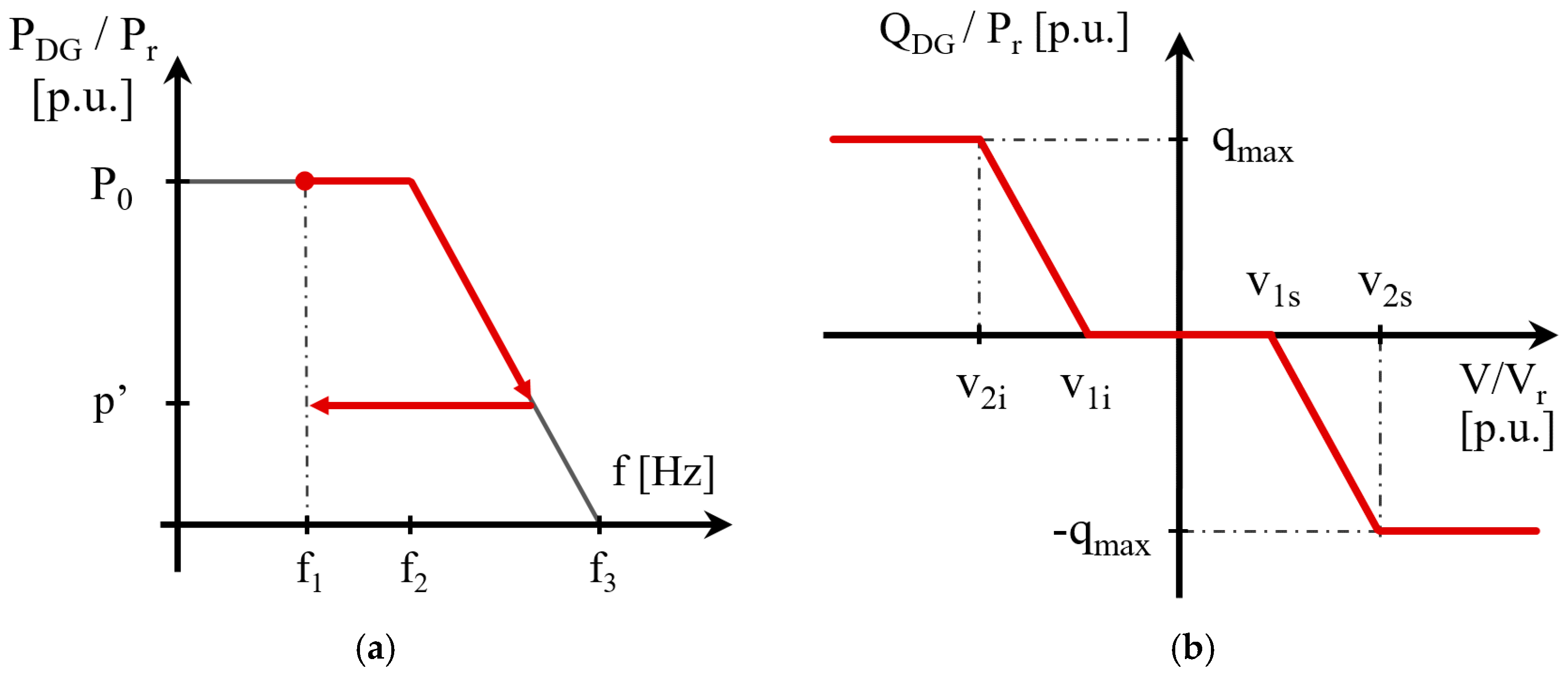
2.1. P/f and Q/V regulations
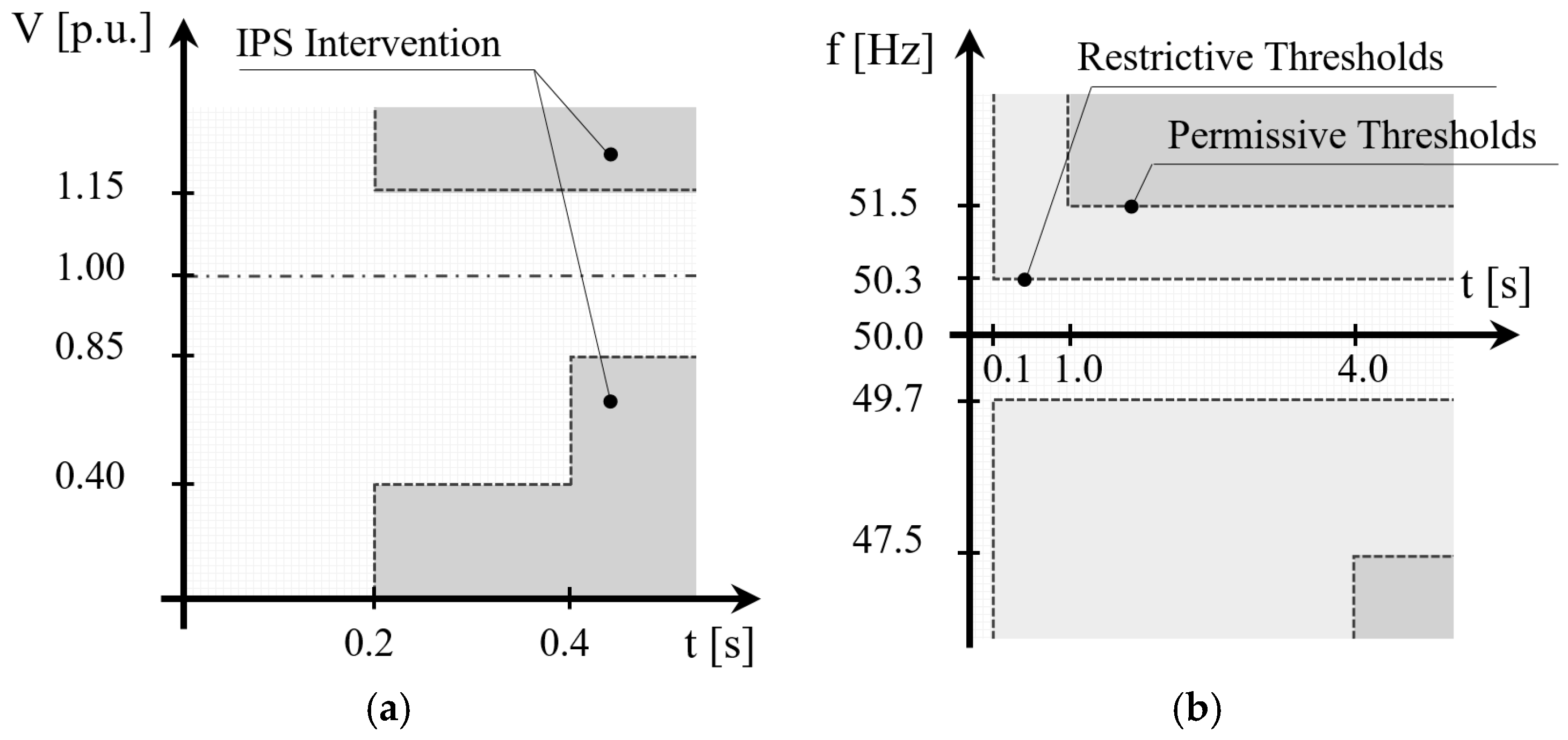
2.2. Interface Protection System for DG
3. ESS Regulating Functions
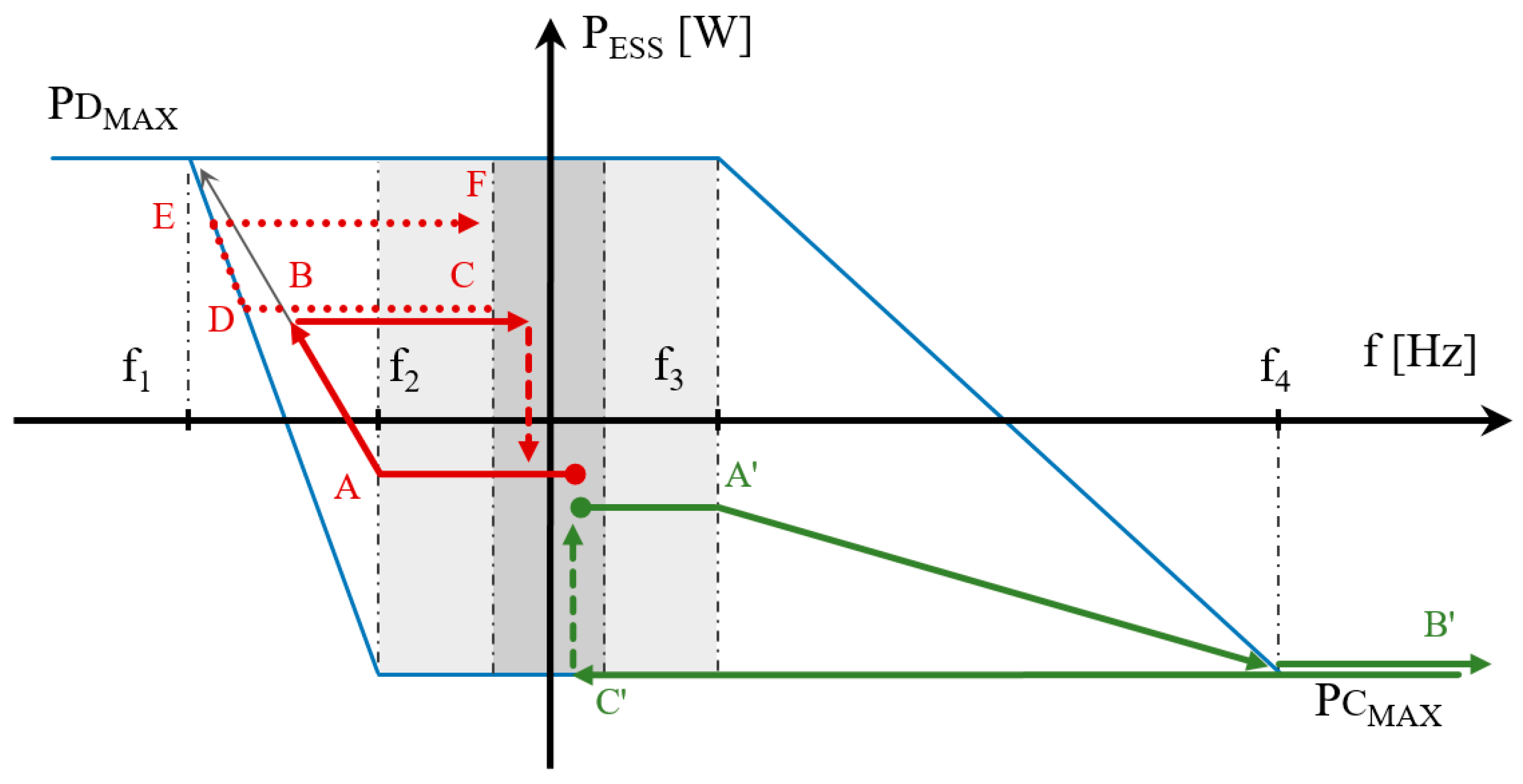
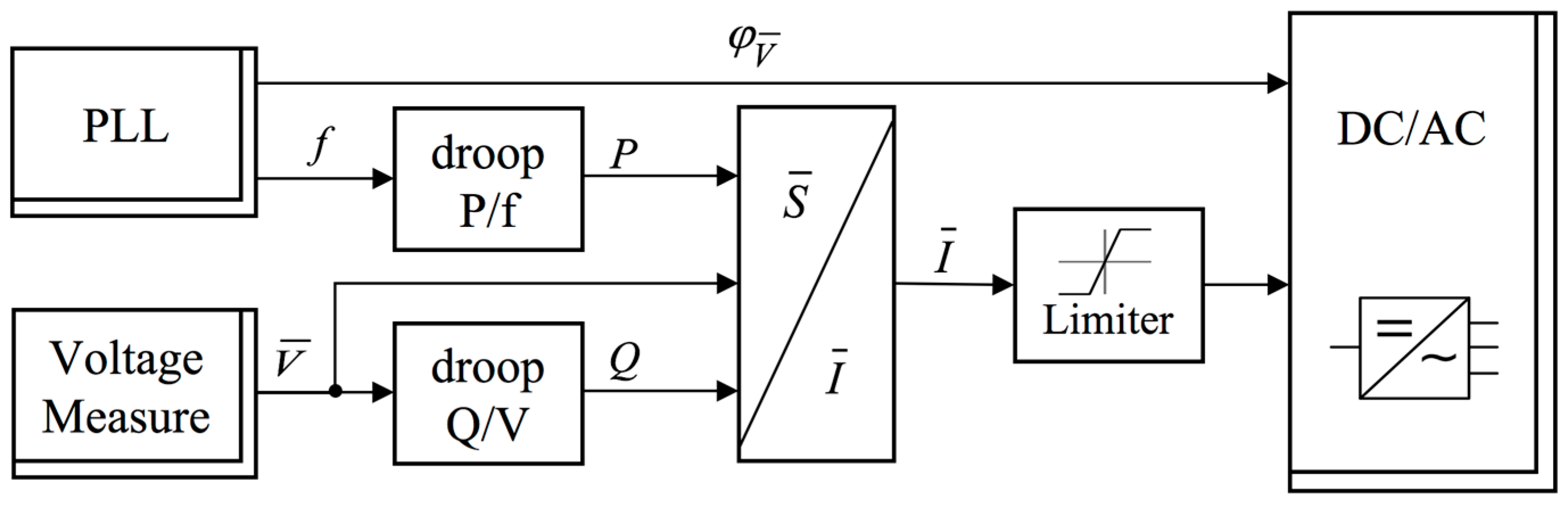
3.1. Active Power Regulation of AC Interfaced ESS
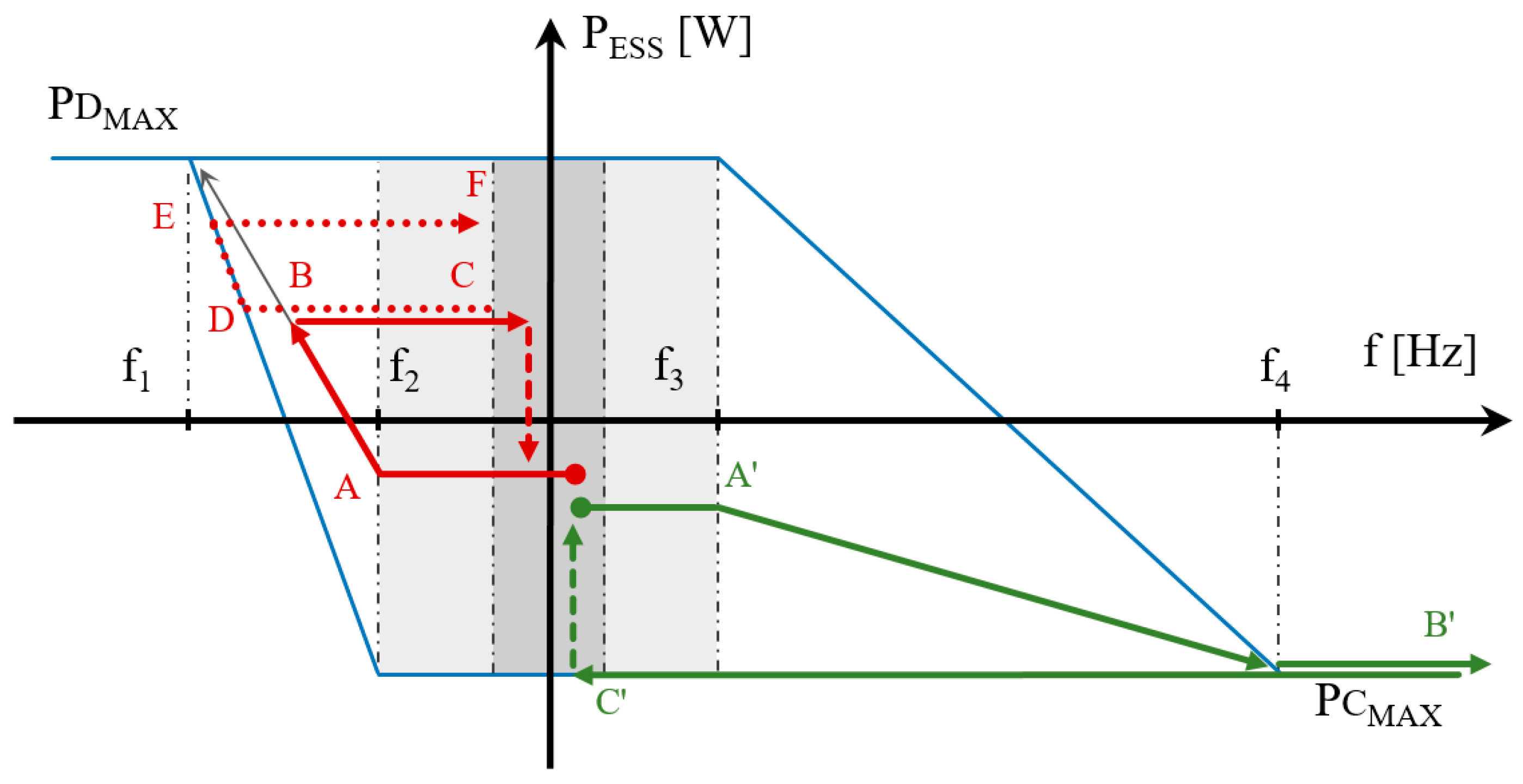
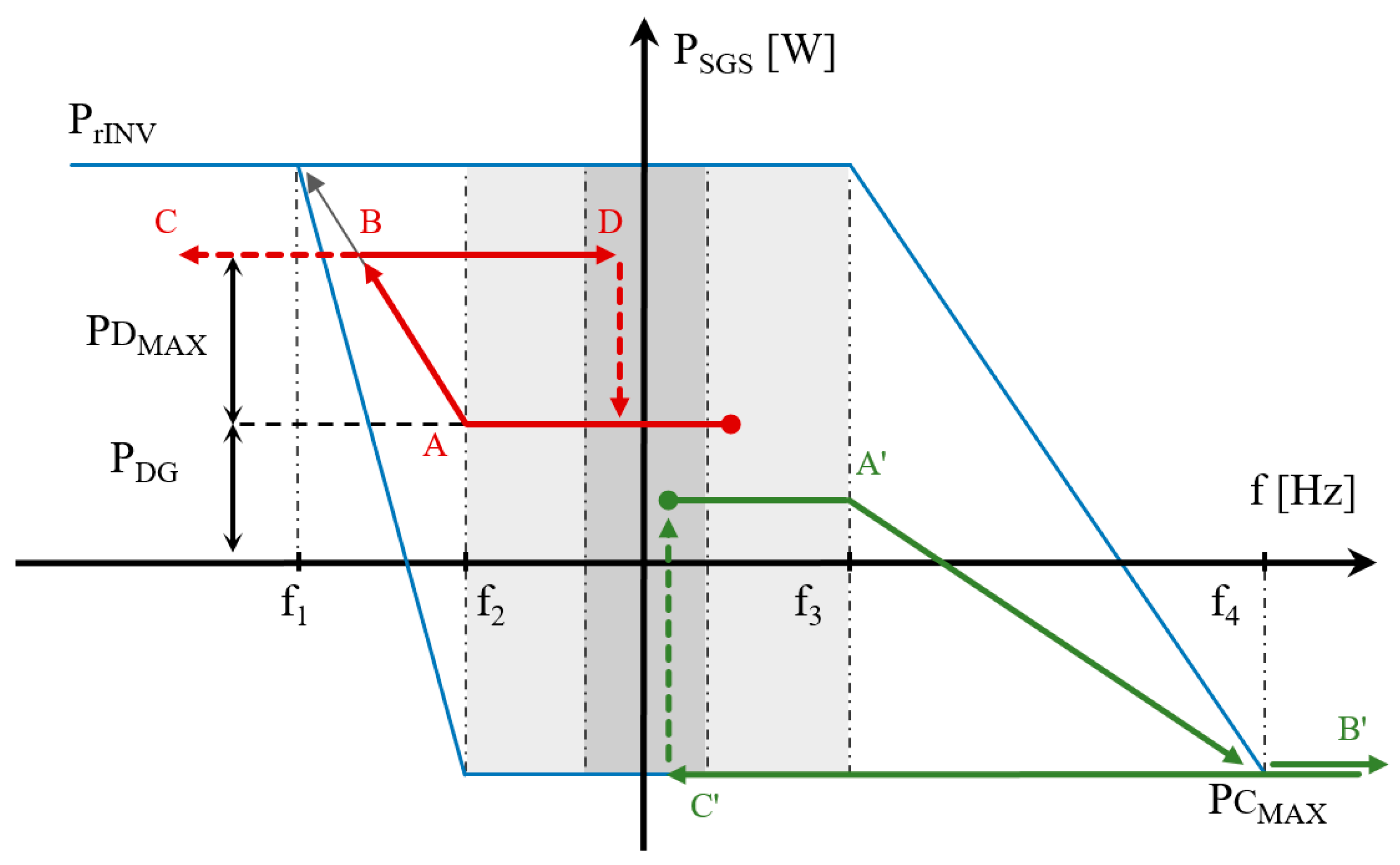
3.2. Active Power Regulation of DC Connected ESS
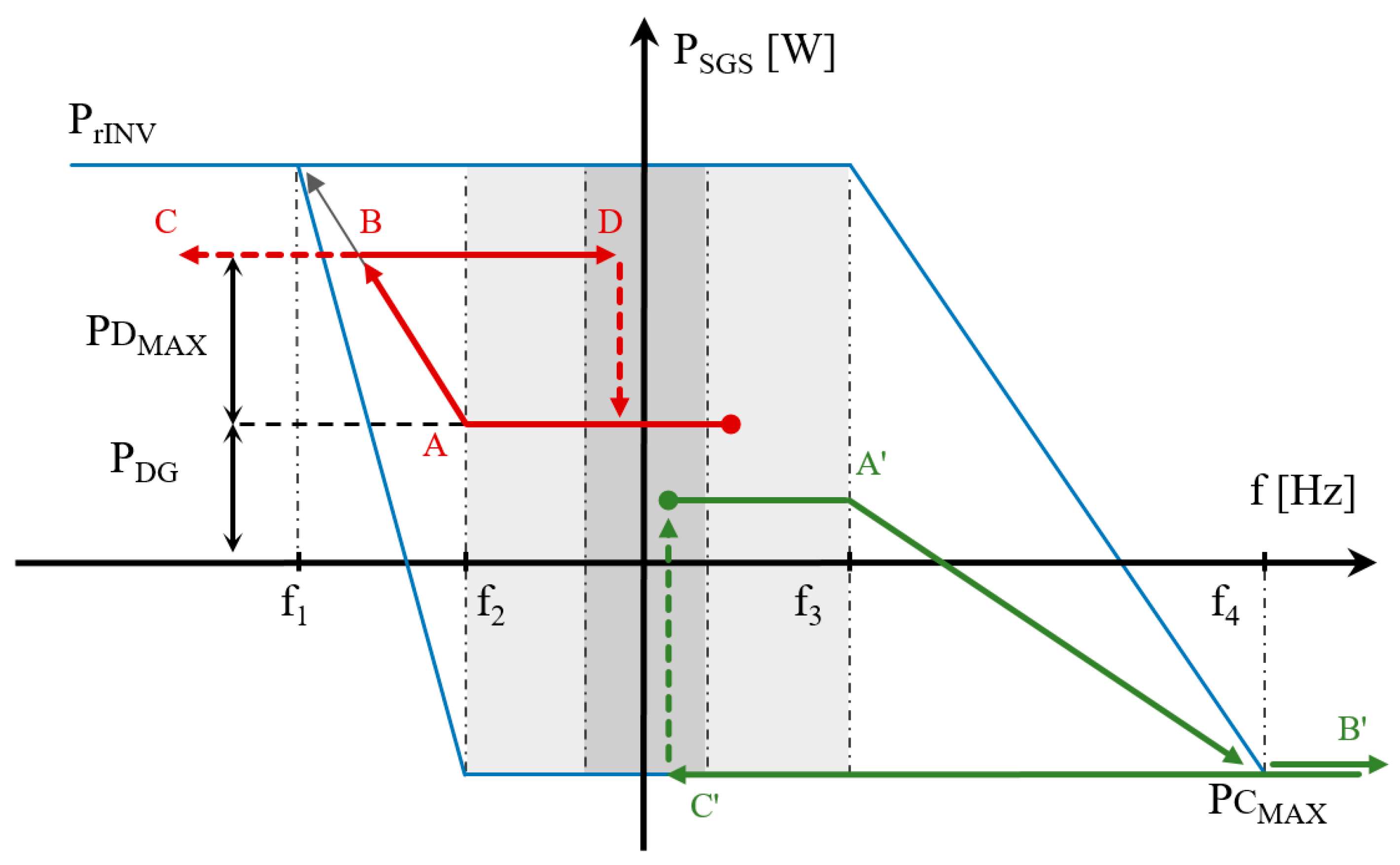
- PSGS is the total active power injected by the overall generating system (static generator with storage (SGS));
- PrINV represents the rated power of the electronic converter interconnecting the SGS to the end-user AC bus;
- PDMAX and PCMAX are the ESS power constraints in discharge and charge, respectively, as mentioned above; and
- PDG is the actual active power produced by the local generator immediately before the frequency perturbation. The reference thresholds f1, f2, f3 and f4 are unaltered in comparison with the previous subsection discussing AC interfaced ESS, so their values are listed in Table 2.
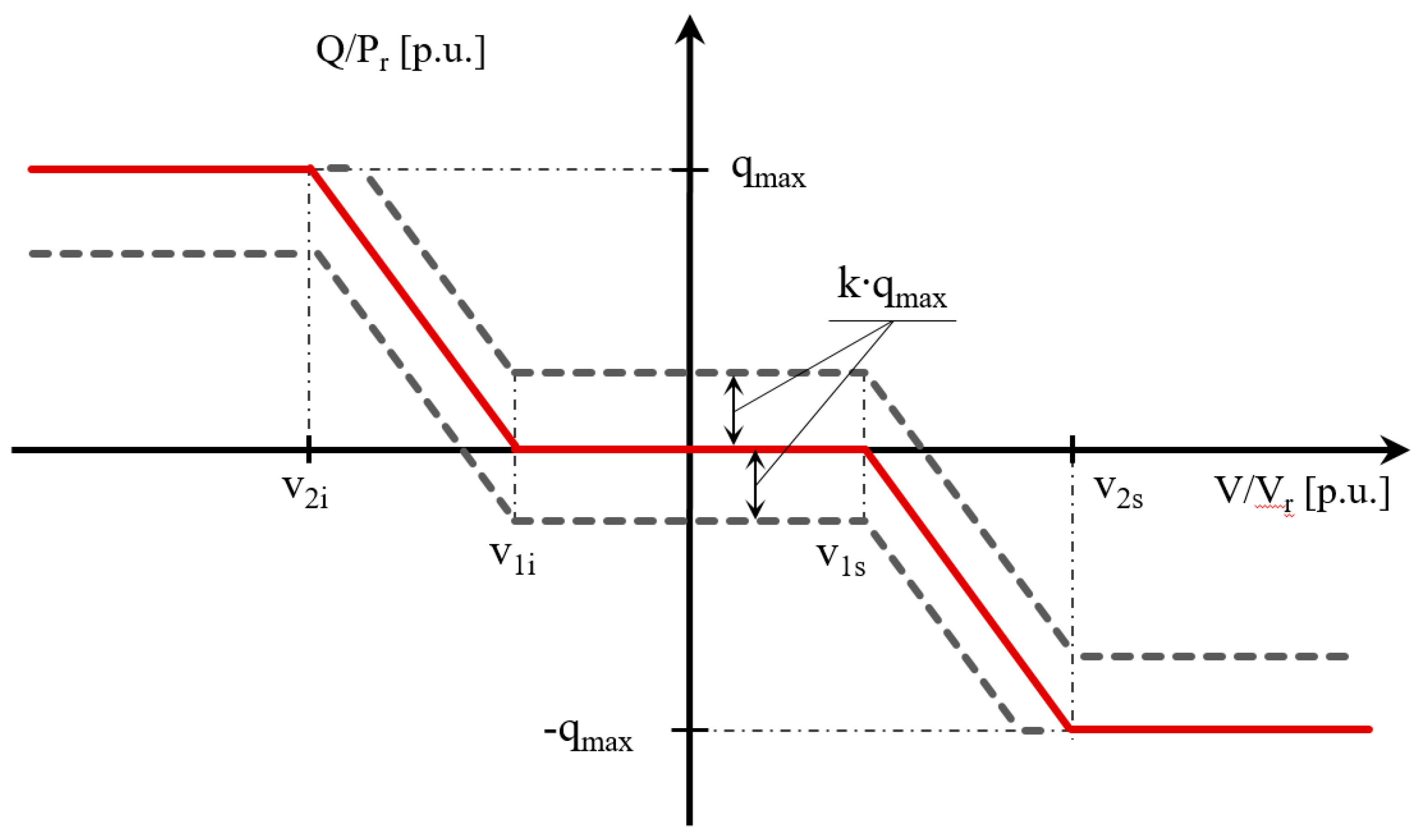
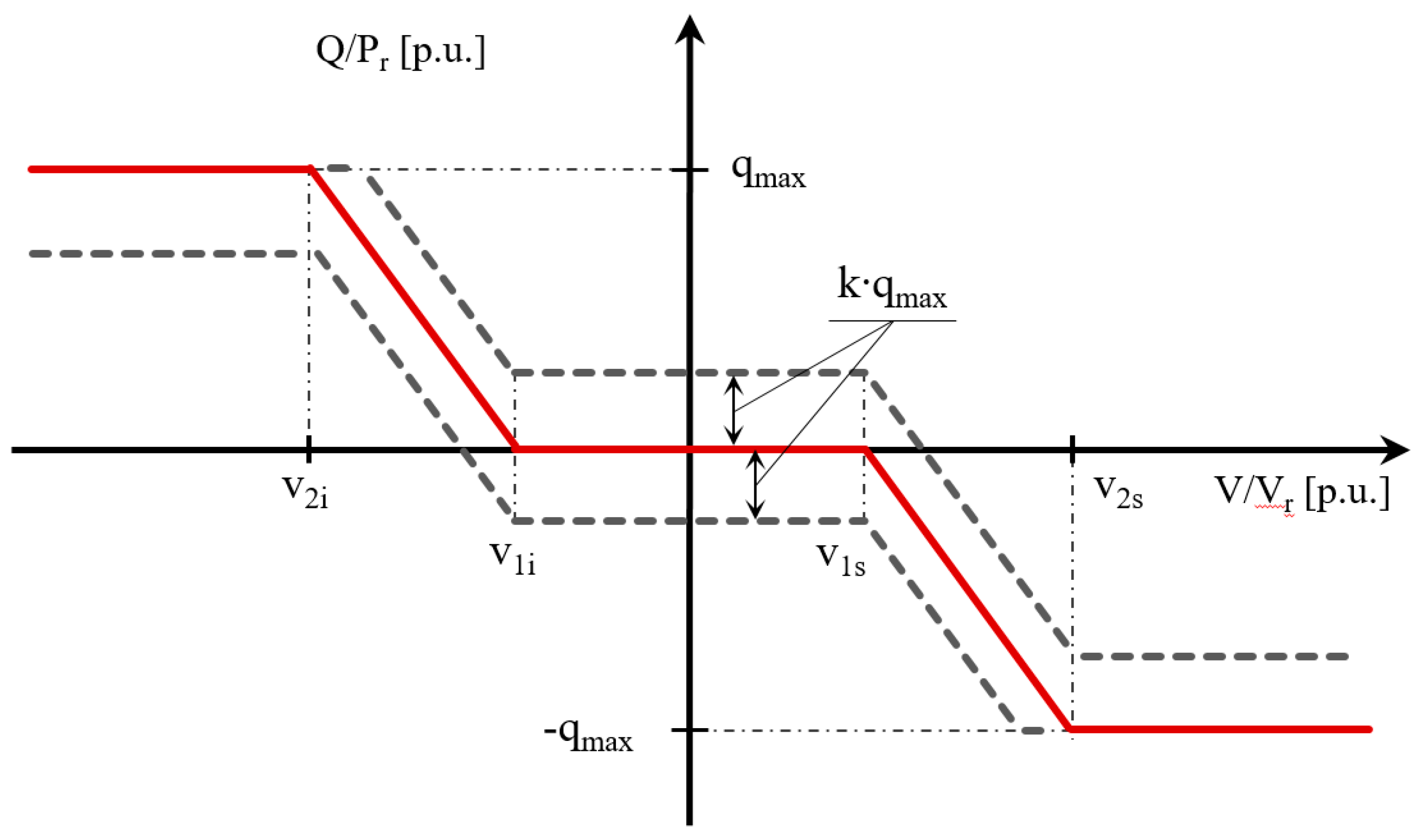
3.3. Reactive Power Regulation
3.4. Interface Protection System for ESSs
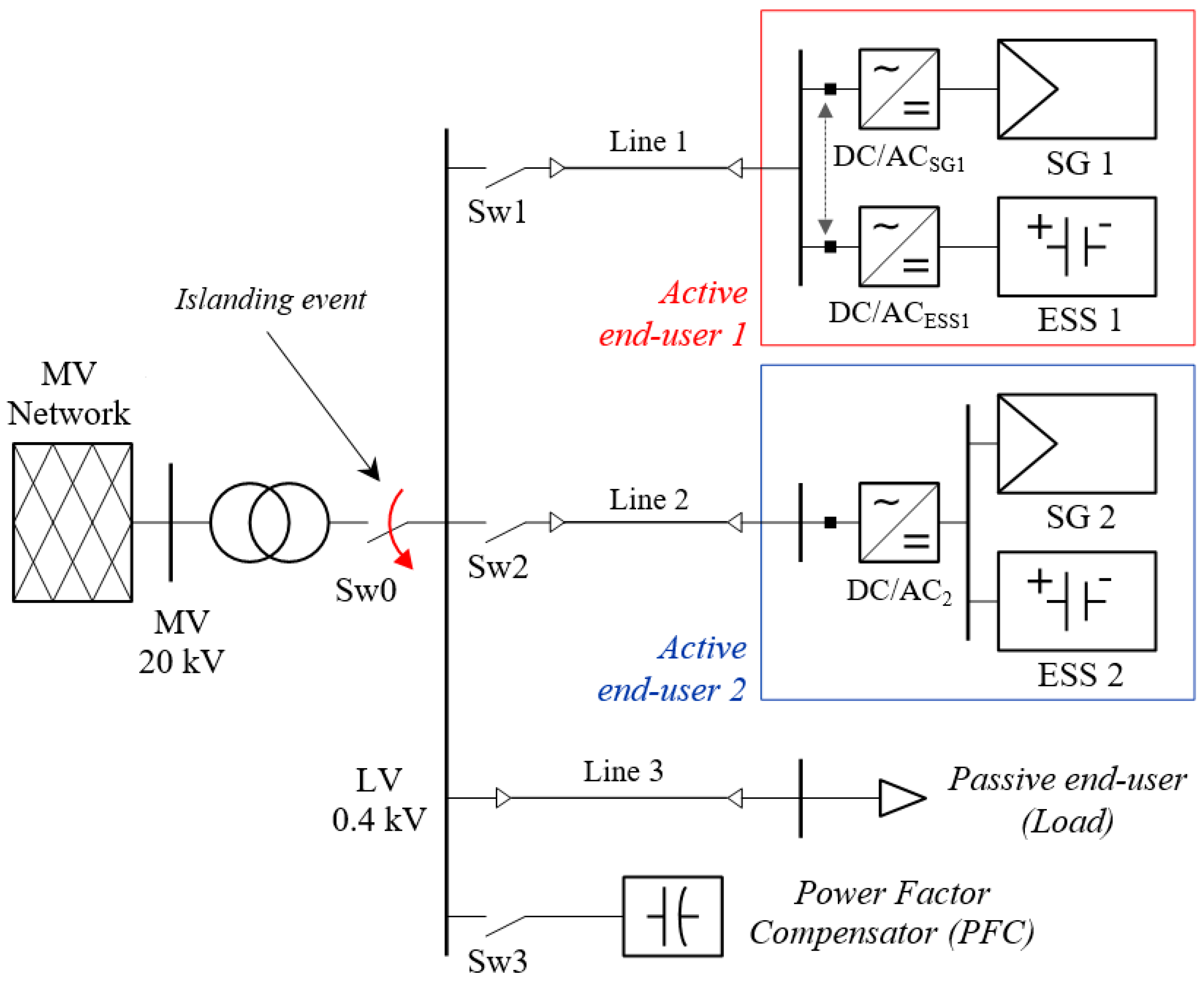
4. Case study
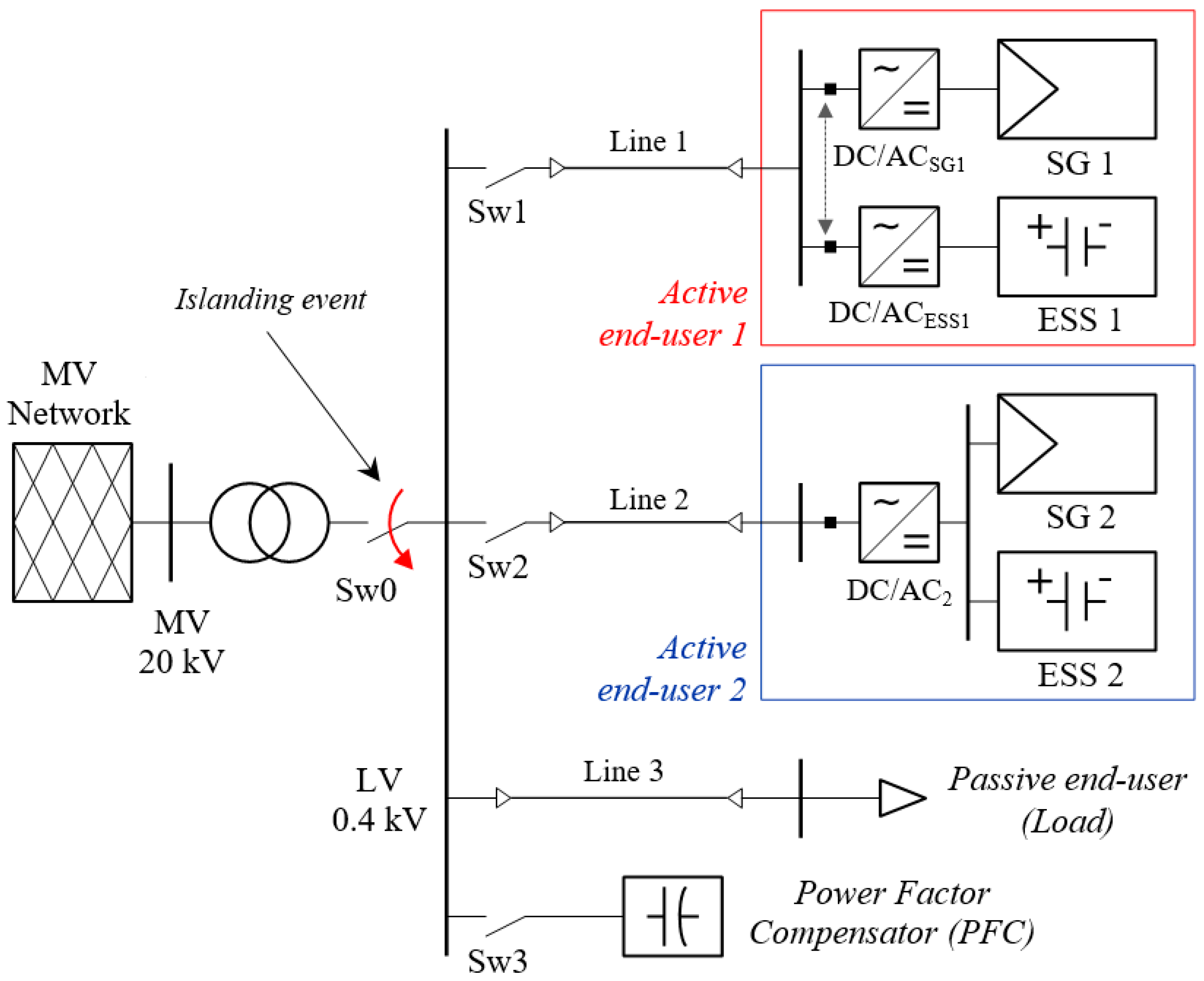
- A MV Network, supplying the LV subsystem through a generic Dyn11 MV/LV transformer;
- The equivalent Active end-user 1, consisting of a static generator SG1 with a dedicated DC/AC inverter and an AC coupled storage ESS1;
- The equivalent Active end-user 2 representing a SGS in which the storage unit ESS2 is DC coupled to the generation unit;
- An equivalent load representing the overall LV loads; and
- A centralized power factor compensator (PFC). Different configuration scenarios are investigated considering the presence of Active end-user 1 or 2, and opening and closing the respective switches Sw1 and Sw2.
Generator Model
5. Simulation and Results
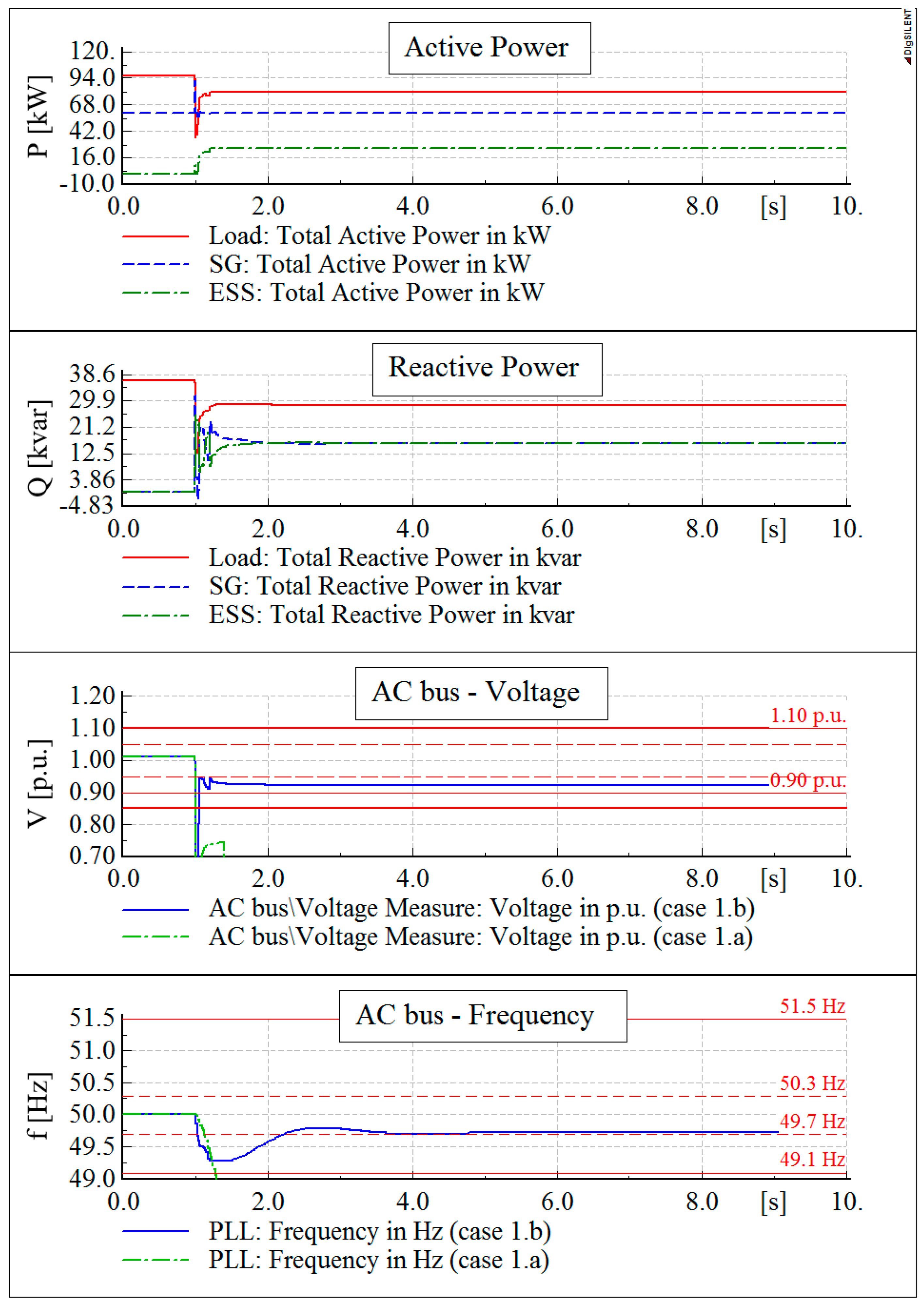
- The former case considers the AC coupled ESS, i.e., Active end-user 1 in operation and Active end-user 2 out of service (Sw1 closed, Sw2 open); and
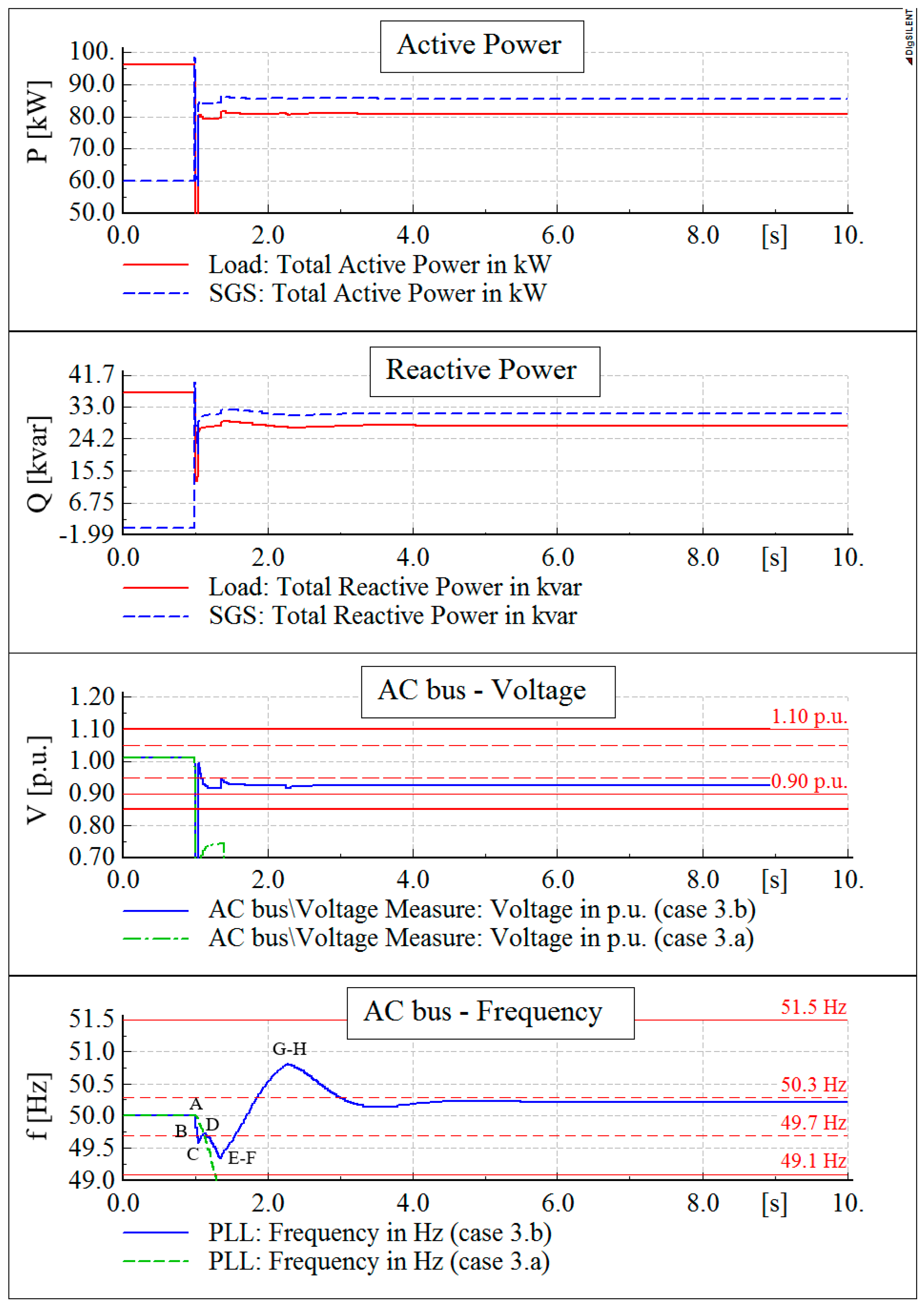
- The latter case represents the DC coupled ESS, i.e., Active end-user 2 connected and Active end-user 1 out of service (Sw1 open, Sw2 closed).
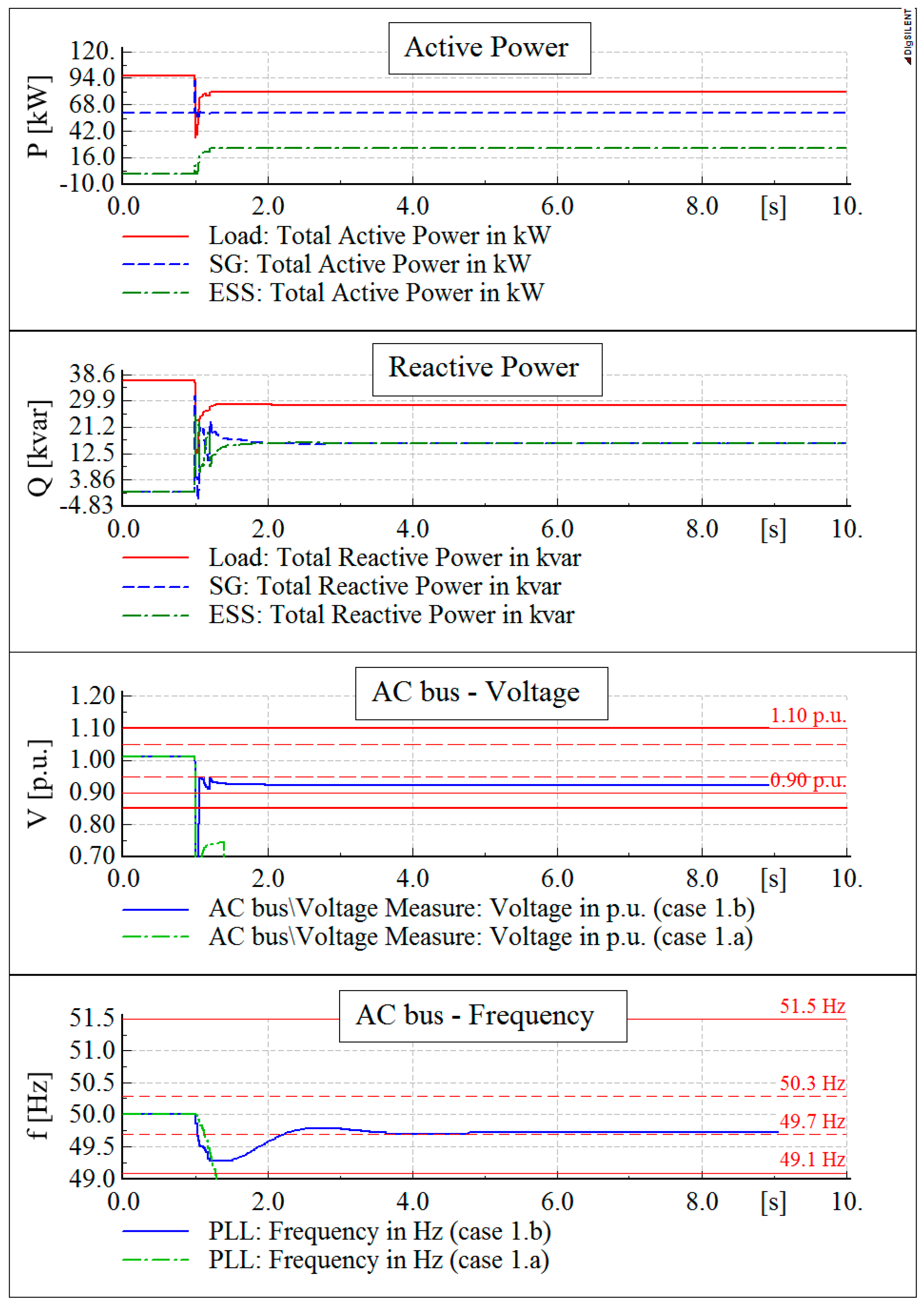
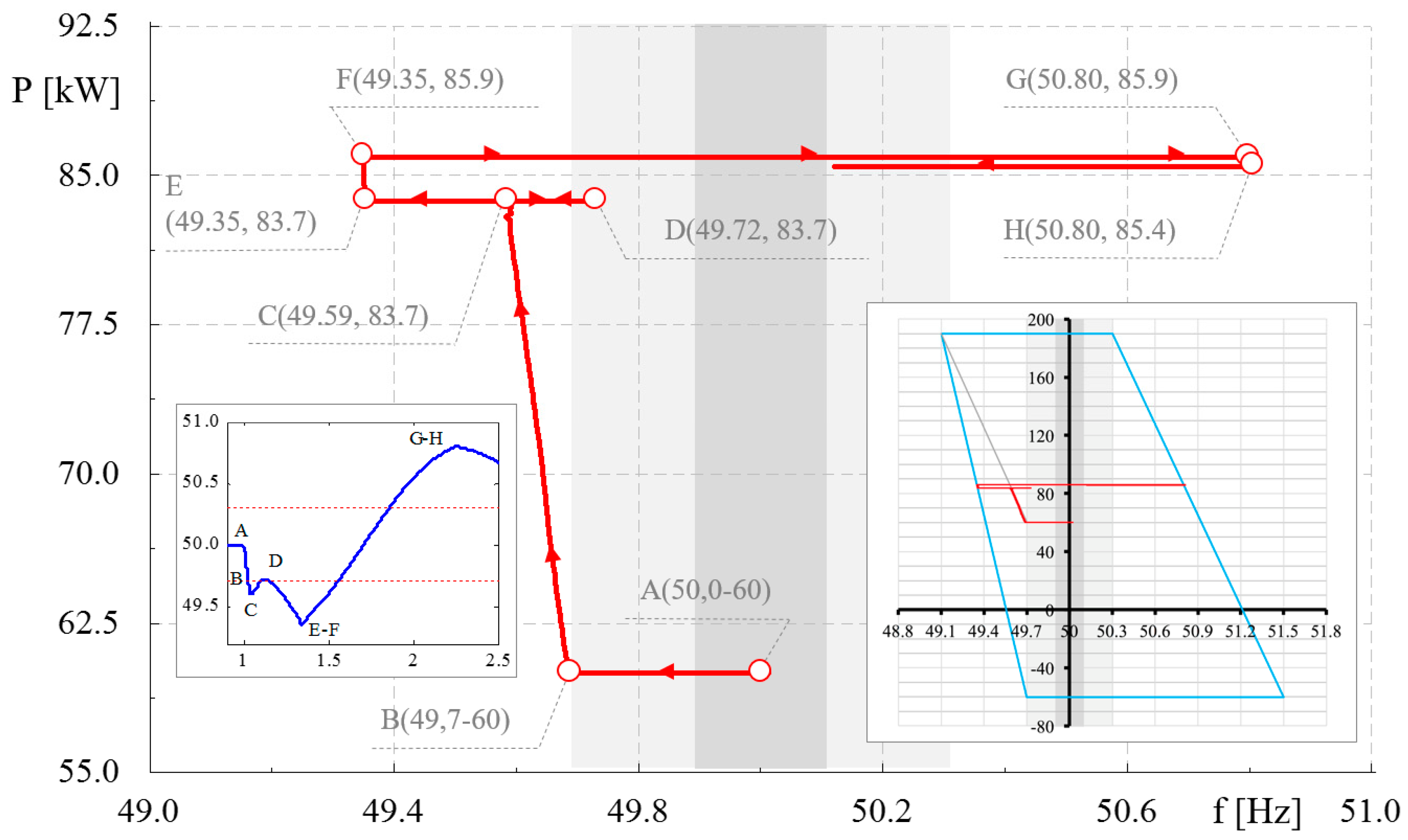
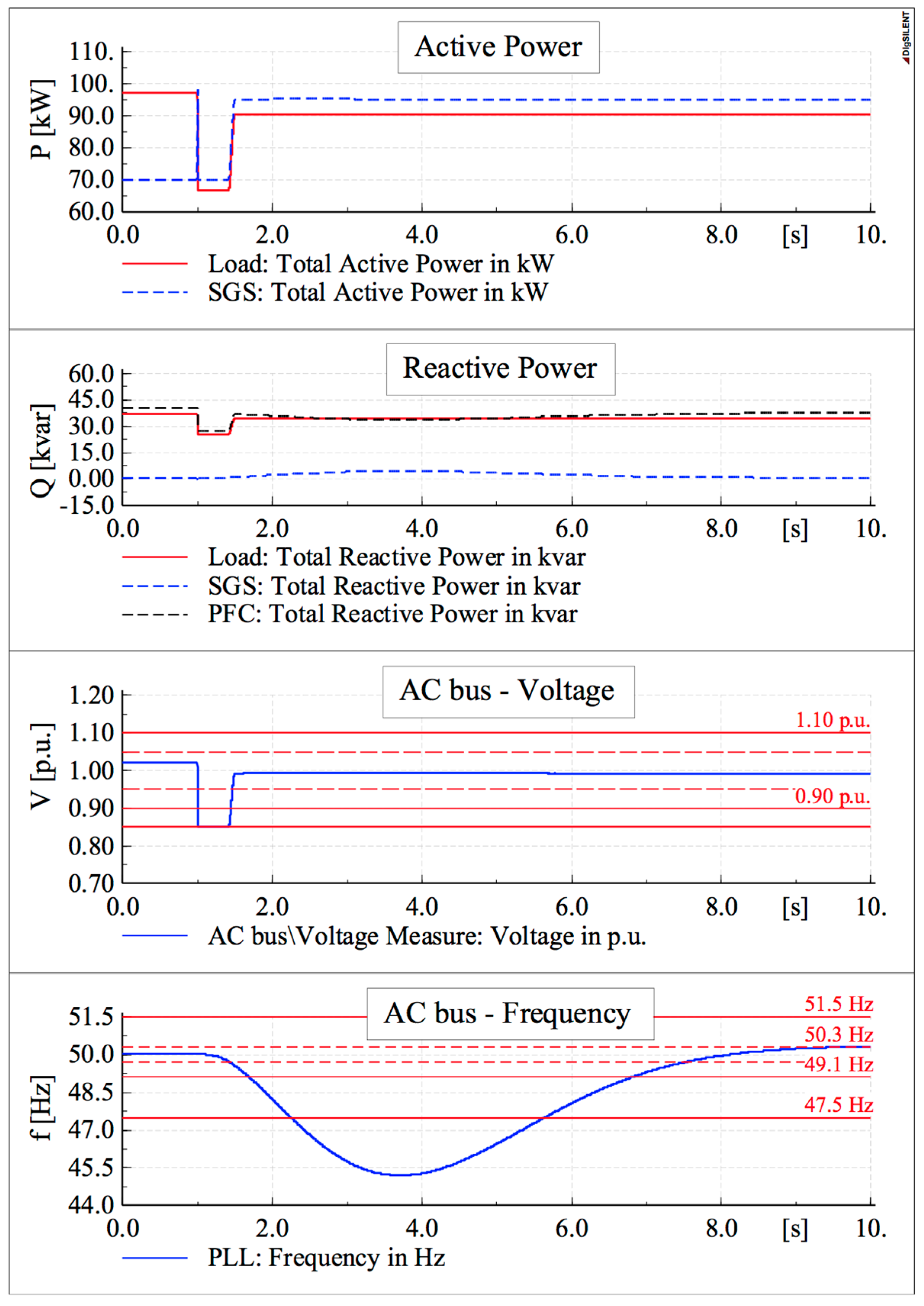
5.1. AC Coupled ESS (Active End-User 1)
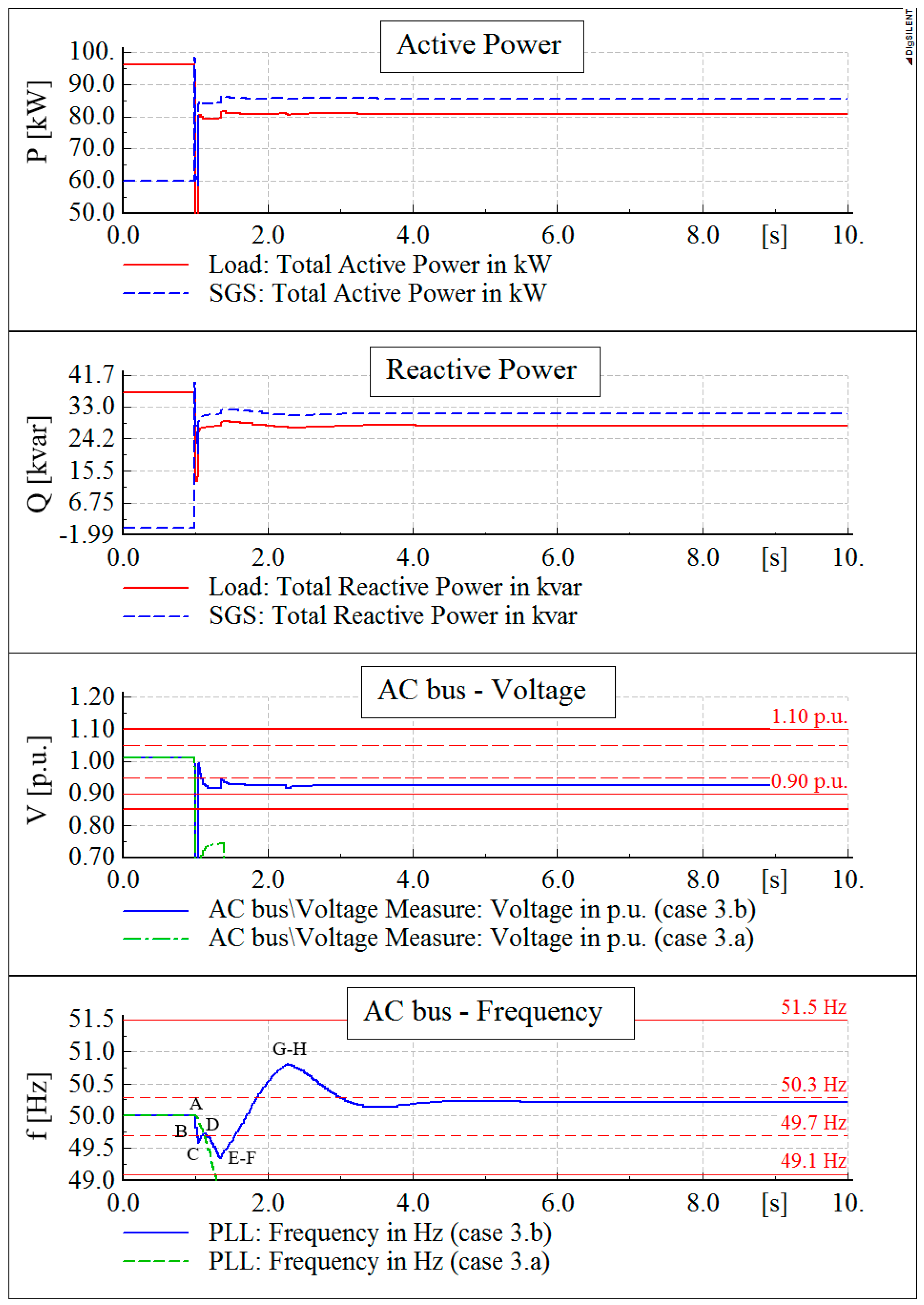
5.2. DC Coupled ESS (Active End-User 2)
5.3. Influence of Q/V Regulation Delay
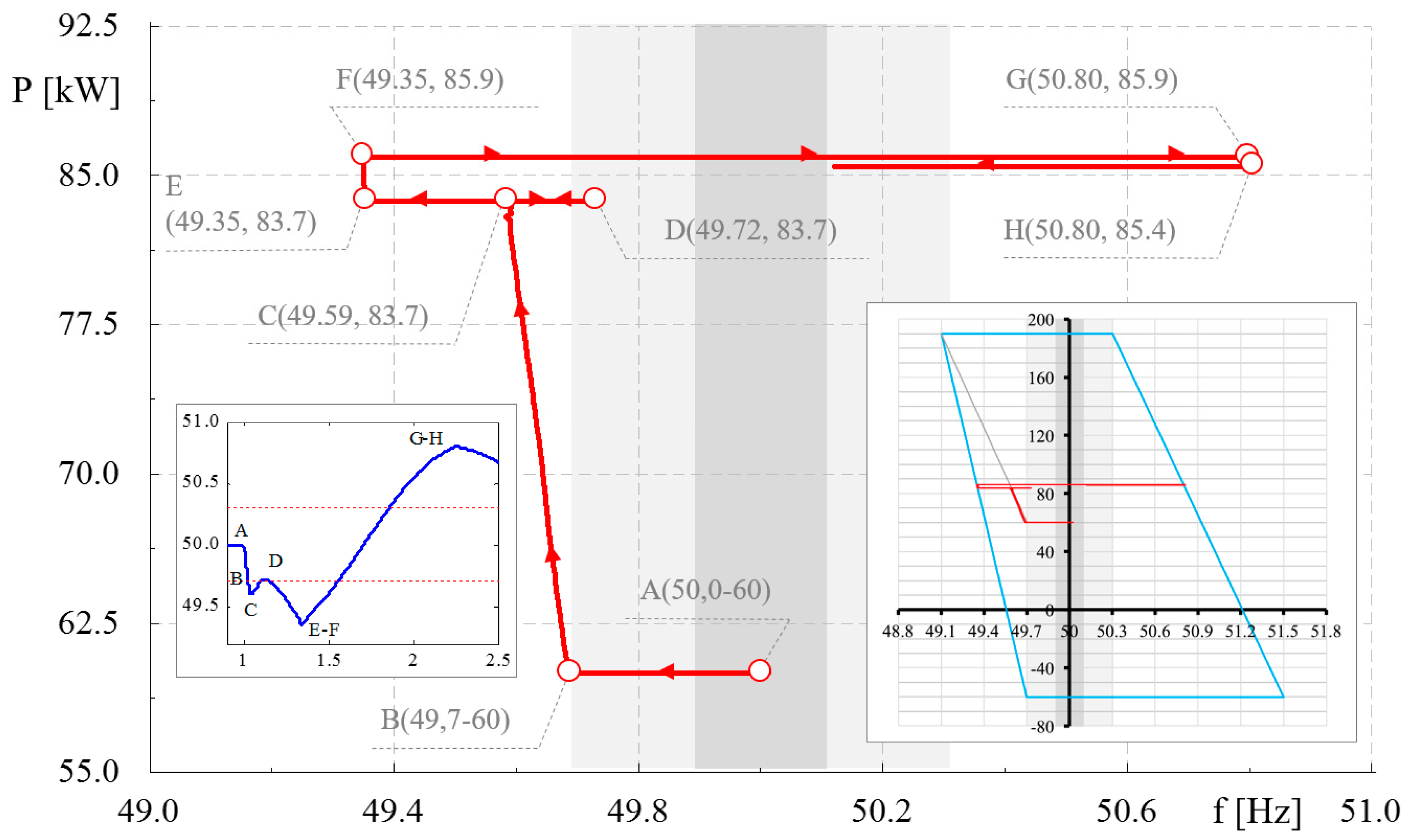
- Slope of lateral sides of the operating quadrilateral (Figure 4). It should be noted that in LV systems, the P/f function has impact not only on the frequency stability, but also on network voltage perturbations due to the high R/X ratio. Since the frequency coordinates on the horizontal axis are defined by the grid code [9], increasing PDG, PDMAX and PCMAX means increasing the response of active end-users to frequency perturbations. This could result in frequency/voltage instability (triggering the IPS activation) if the reactive power response of active end-users to voltage perturbations is slowed down through a low-pass filter.
- Effective availability of active power in the disconnected portion of the network: in the case PDG + PDMAX is close to the load absorption, this condition masks the instability caused by the slope of lateral sides of the operating quadrilateral of Figure 4, limiting the response of the ESS immediately after the network portion separation.
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Divya, K.C.; Østergaard, J. Battery energy storage technology for power systems—An overview. Electr. Power Syst. Res. 2009, 79, 511–520. [Google Scholar] [CrossRef]
- Bignucolo, F.; Caldon, R.; Carradore, L.; Sacco, A.; Turri, R. Role of storage systems and market based ancillary services in active distribution networks management. In Proceedings of the 43rd International Conference on Large High Voltage Electric Systems (CIGRE), Paris, France, 22–27 August 2010.
- Bignucolo, F.; Bertoluzzo, M.; Fontana, C. Applications of the solid state transformer concept in the electrical power system. In Proceedings of the International Annual Conference (AEIT), Napoli, Italy, 14–16 October 2015.
- Bignucolo, F.; Caldon, R.; Coppo, M.; Pasut, F.; Pettinà, M. Integration of Lithium-Ion Battery Storage Systems in Hydroelectric Plants for Supplying Primary Control Reserve. Energies 2017, 10, 98. [Google Scholar] [CrossRef]
- European Committee for Electrotechnical Standardization, Technical Specification CENELEC TS 50549-1. Requirements for Generating Plants to Be Connected in Parallel with Distribution Networks—Part 1: Connection to a LV Distribution Network above 16 A; CENELEC: Brussels, Belgium, 2015. [Google Scholar]
- European Committee for Electrotechnical Standardization, Technical Specification CENELEC TS 50549-2. Requirements for Generating Plants to Be Connected in Parallel with Distribution Networks–Part 2: Connection to a MV Distribution System; CENELEC: Brussels, Belgium, 2015. [Google Scholar]
- European Committee for Electrotechnical Standardization, European Standard CENELEC EN 50438. Requirements for Micro-Generating Plants to Be Connected in Parallel with Public Low-Voltage Distribution Networks; CENELEC: Brussels, Belgium, 2013. [Google Scholar]
- Comitato Elettrotecnico Italiano, CEI 0–16. Reference Technical Rules for the Connection of Active and Passive Consumers to the HV and MV Electrical Networks of Distribution Company; CEI: Milan, Italy, 2016. [Google Scholar]
- Comitato Elettrotecnico Italiano, CEI 0–21. Reference Technical Rules for the Connection of Active and Passive Users to the LV Electrical Utilities; CEI: Milan, Italy, 2016. [Google Scholar]
- Bignucolo, F.; Raciti, A.; Caldon, R. A control strategy for the management of islanded networks with renewables and storage systems. In Proceeding of the 2014 49th International Universities Power Engineering Conference (UPEC), Cluj-Napoca, Romania, 2–5 September 2014.
- Bignucolo, F.; Raciti, A.; Caldon, R. Coordinating active and reactive energy balances in islanded networks supported by renewables and BESS. In Proceeding of the 3rd Renewable Power Generation Conference (RPG 2014), Naples, Italy, 24–25 September 2014.
- Yong, W.K.; Lim, Y.; Morris, S. Allowing islanded operation of photovoltaic system with the aid of droop-controlled inverter. In Proceedings of the 2014 IEEE Conference on Energy Conversion (CENCON), Johor Bahru, Malaysia, 13–14 October 2014; pp. 248–253.
- Abusief, F.; Caldon, R.; Bignucolo, F. Remote islanded distribution networks supplied by BESS integrated PV generation units. In Proceedings of the 2016 IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 7–10 June 2016.
- Bignucolo, F.; Caldon, R.; Frigo, M.; Morini, A.; Pitto, A.; Silvestro, F. Impact of distributed generation on network security: Effects on loss-of-main protection reliability. In Proceedings of the Universities Power Engineering Conference (UPEC), Padova, Italy, 1–4 September 2008.
- Caldon, R.; Coppo, M.; Sgarbossa, R.; Turri, R. Risk of unintentional islanding in LV distribution networks with inverter-based DGs. In Proceedings of the 48th International Power Engineering Conference, Dublin, UK, 2–5 September 2013.
- Amadei, F.; Cerretti, A.; Coppo, M.; Mattavelli, P.; Sgarbossa, R.; Turri, R. Temporary islanding operations of MV/LV active distribution networks under fault conditions. In Proceedings of the 49th International Universities Power Engineering Conference, Cluj-Napoca, Romania, 2–5 September 2014.
- Cerretti, A.; D’Orazio, L.; Pezzato, C.; Sapienza, G.; Valvo, G.; Camalleri, N.; Mattavelli, P.; Sgarbossa, R.; Turri, R.; De Berardinis, E. Uncontrolled islanding operations of MV/LV active distribution networks. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015.
- Sgarbossa, R.; Lissandron, S.; Mattavelli, P.; Turri, R.; Cerretti, A. Analysis of ΔP-ΔQ area of uncontrolled islanding in low voltage grids with PV generators. IEEE Trans. Ind. Appl. 2016, 52, 2387–2396. [Google Scholar] [CrossRef]
- Bignucolo, F.; Cerretti, A.; Coppo, M.; Savio, A.; Turri, R. Impact of Distributed Generation Grid Code Requirements on Islanding Detection in LV Networks. Energies 2017, 10, 156. [Google Scholar] [CrossRef]
- Bignucolo, F.; Savio, A.; Turri, R.; Cerretti, A. Undesired islanding of MV networks sustained by LV dispersed generators compliant with present grid code requirements. In Proceedings of the 51st International Universities UPEC, Coimbra, Portugal, 6–9 September 2016.
- Koohi-Kamali, S.; Rahim, N.A. Coordinated control of smart microgrid during and after islanding operation to prevent under frequency load shedding using energy storage system. Energy Convers. Manag. 2016, 127, 623–646. [Google Scholar] [CrossRef]
- Kermani, M. Transient voltage and frequency stability of an isolated microgrid based on energy storage systems. In Proceedings of the 2016 IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 7–10 June 2016.
- Ballal, M.S.; Bhadane, K.V.; Moharil, R.M.; Suryawanshi, H.M. A control and protection model for the distributed generation and energy storage systems in microgrids. J. Power Electron. 2016, 16, 748–759. [Google Scholar] [CrossRef]
- Hassan Youssef, K. Optimal management of unbalanced smart microgrids for scheduled and unscheduled multiple transitions between grid-connected and islanded modes. Electr. Power Syst. Res. 2016, 141, 104–113. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Jørgensen, B.N.; Catalão, J.P.S. A control plan for the stable operation of microgrids during grid-connected and islanded modes. Electr. Power Syst. Res. 2015, 129, 10–22. [Google Scholar] [CrossRef]
- Shin, S.-S.; Oh, J.-S.; Jang, S.-H.; Chae, W.-K.; Park, J.-H.; Kim, J.-E. A fault analysis on AC microgrid with distributed generations. J. Electr. Eng. Technol. 2016, 11, 1600–1609. [Google Scholar] [CrossRef]
- Bignucolo, F.; Savio, A.; Caldon, R.; Cerretti, A. Effects of Average Power Factor Management in Distribution Systems with Dispersed Generation. In Proceedings of the AEIT International Annual Conference, Capri, Italy, 5–7 October 2016.
- Blazic, B.; Papic, I. Voltage profile support in distribution networks—influence of the network R/X ratio. In Proceedings of the 13th Power Electronics and Motion Control (EPE-PEMC) Conference, Poznan, Poland, 1–3 September 2008; pp. 2510–2515.
- Vandoorn, T.L.; Renders, B.; Degroote, L.; Meersman, B.; Vandevelde, L. Active load control in islanded microgrids based on the grid voltage. IEEE Trans. Smart Grid 2011, 2, 139–151. [Google Scholar] [CrossRef]
- Latif, A.; Gawlik, W.; Palensky, P. Quantification and mitigation of unfairness in active power curtailment of rooftop photovoltaic systems using sensitivity based coordinated control. Energies 2016, 9. [Google Scholar] [CrossRef]
- Ahmad, A.; Rajaji, L. Anti-islanding technique for grid connected residential solar inverter system. In Proceedings of the Institution of Engineering and Technology (IET) Chennai Fourth International Conference on Sustainable Energy and Intelligent Systems (SEISCON), Chennai, India, 12–14 December 2013; pp. 114–118.
- Cataliotti, A.; Cosentino, V.; Guaiana, S.; Di Cara, D.; Panzavecchia, N.; Tinè, G. An interface protection system with power line communication for distributed generators remote control. In Proceedings of the 2014 IEEE International Workshop on Applied Measurements for Power Systems (AMPS), Aachen, Germany, 24–26 September 2014.
- Bufano, V.; Camalleri, N.; Cerretti, A.; D’Adamo, C.; D’Orazio, L.; Pezzato, C.; De Berardinis, E. Risk of uncontrolled islanding on active distribution networks short term countermeasures taken by Enel Distribuzione. In Proceedings of the 23nd International Conference and Exhibition on Electricity Distribution, Lyon, France, 15–18 June 2015.
- Bufano, V.; D’Adamo, C.; D’Orazio, L.; D’Orinzi, C. Innovative solutions to control unintentional islanding on LV network with high penetration of distributed generation. In Proceedings of the 22nd International Conference and Exhibition on Electricity Distribution (CIRED), Stockholm, Sweden, 10–13 June 2013.
- Savio, A.; Bignucolo, F.; Sgarbossa, R.; Mattavelli, P.; Cerretti, A.; Turri, R. A novel measurement-based procedure for load dynamic equivalent identification. In Proceedings of the 2015 IEEE 1st International Forum on Research and Technologies for Society and Industry Leveraging a better tomorrow (RTSI), Turin, Italy, 16–18 September 2015; pp. 274–279.
- Milanović, J.; Matevosiyan, J.; Gaikwad, A. TB 566: Modeling and Aggregation of Loads in Flexible Power Networks —WG C4.605; Technical Report; International Council on Large Electric systems (CIGRE): Paris, France, 2014. [Google Scholar]
- Savio, A.; Bignucolo, F.; Caldon, R. Contribution of MV static distributed generation to voltage unbalance mitigation. In Proceedings of the AEIT International Annual Conference, Capri, Italy, 5–7 October 2016.
- Borsche, T.S.; Ulbig, A.; Andersson, G. Impact of Frequency Control Reserve Provision by Storage Systems on Power System Operation. IFAC Proc. Vol. 2014, 47, 4038–4043. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| P/f Regulation Characteristic | Q/V Regulation Characteristic | ||
|---|---|---|---|
| f1 | 50.0 Hz | v2s | 1.10 p.u. |
| f2 | 50.3 Hz | v1s | 1.05 p.u. |
| f3 | 51.5 Hz | v1i | 0.95 p.u. |
| ‑ | ‑ | v2s | 0.90 p.u. |
| ‑ | ‑ | q* | 0.4843 p.u. |
| P/f Regulation Characteristic | |||
|---|---|---|---|
| f1 | 49.1 Hz | f3 | 50.3 Hz |
| f2 | 49.7 Hz | f4 | 51.5 Hz |
| SG set-point | Case | ESS | PFC (Sw3) | IPS Correct Action |
|---|---|---|---|---|
| 60 kW (60% Pload) | 1.a | OFF | open | YES |
| 1.b | ON | open | NO | |
| 1.c | OFF | closed | YES | |
| 1.d | ON | closed | NO | |
| 140 kW (140% Pload) | 2.a | OFF | open | NO |
| 2.b | ON | open | NO | |
| 2.c | OFF | closed | NO | |
| 2.d | ON | closed | NO |
| SG set-point | Case | ESS | PFC (Sw3) | IPS Correct Action |
|---|---|---|---|---|
| 60 kW (60% Pload) | 3.a | OFF | open | YES |
| 3.b | ON | open | NO | |
| 3.c | OFF | closed | YES | |
| 3.d | ON | closed | NO | |
| 140 kW (140% Pload) | 4.a | OFF | open | NO |
| 4.b | ON | open | NO | |
| 4.c | OFF | closed | NO | |
| 4.d | ON | closed | NO |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bignucolo, F.; Cerretti, A.; Coppo, M.; Savio, A.; Turri, R. Effects of Energy Storage Systems Grid Code Requirements on Interface Protection Performances in Low Voltage Networks. Energies 2017, 10, 387. https://doi.org/10.3390/en10030387
Bignucolo F, Cerretti A, Coppo M, Savio A, Turri R. Effects of Energy Storage Systems Grid Code Requirements on Interface Protection Performances in Low Voltage Networks. Energies. 2017; 10(3):387. https://doi.org/10.3390/en10030387
Chicago/Turabian StyleBignucolo, Fabio, Alberto Cerretti, Massimiliano Coppo, Andrea Savio, and Roberto Turri. 2017. "Effects of Energy Storage Systems Grid Code Requirements on Interface Protection Performances in Low Voltage Networks" Energies 10, no. 3: 387. https://doi.org/10.3390/en10030387