
Modeling and Analysis of Double Stator Slotted Rotor Permanent Magnet Generator

 ,
,
Abstract
:1. Introduction
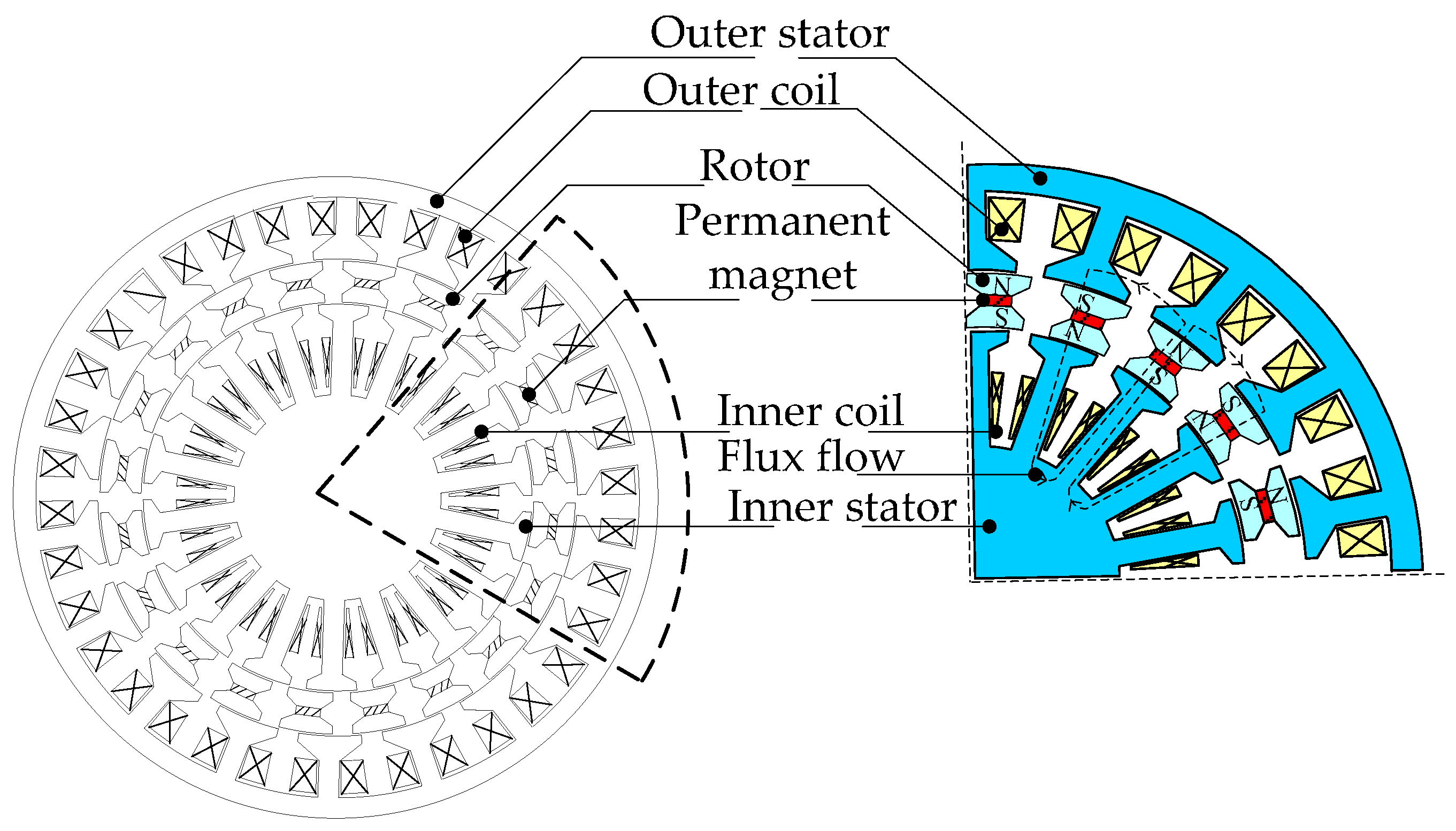
2. Basic Structure and Model Parameter of DSSR-PMG
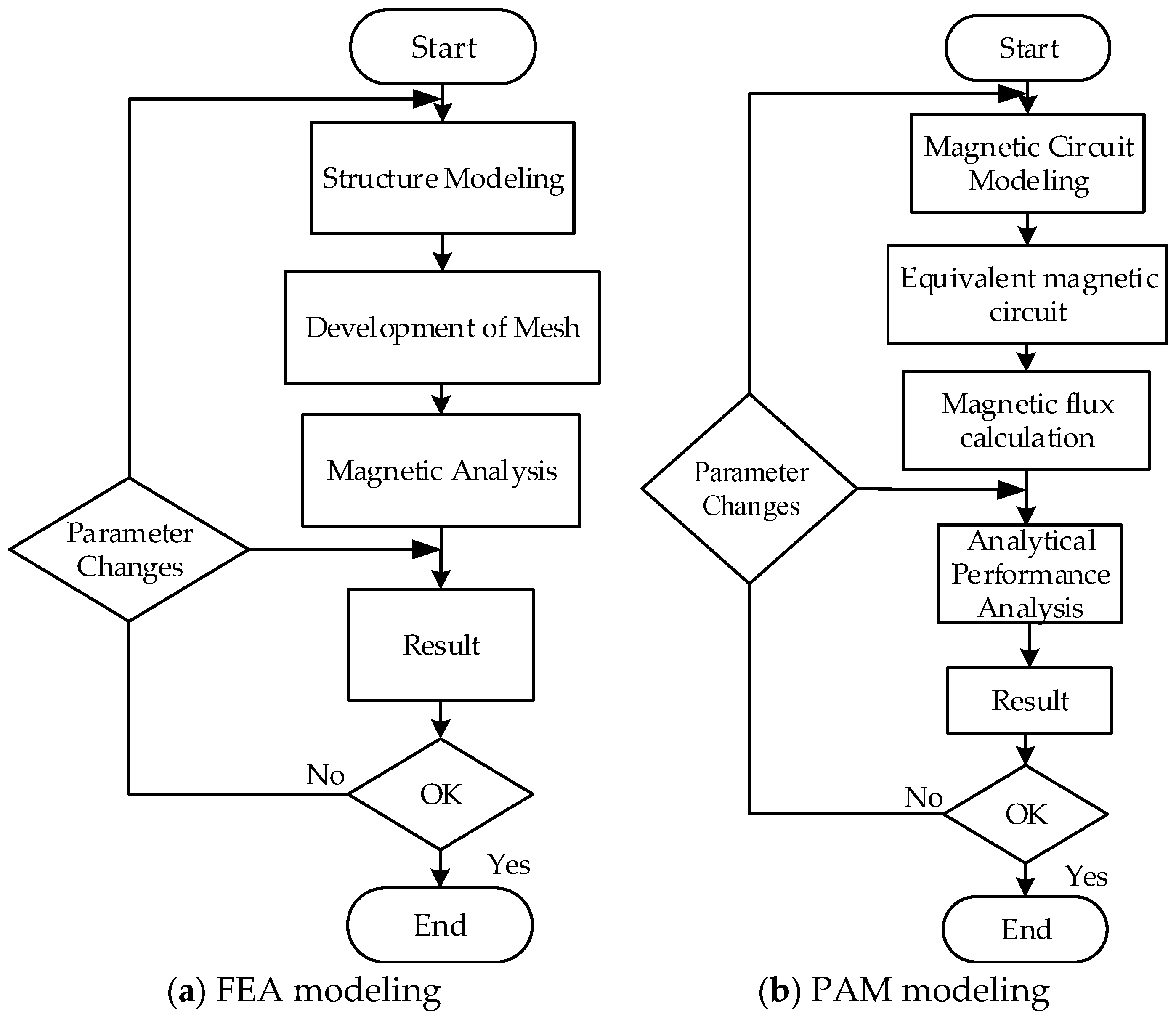
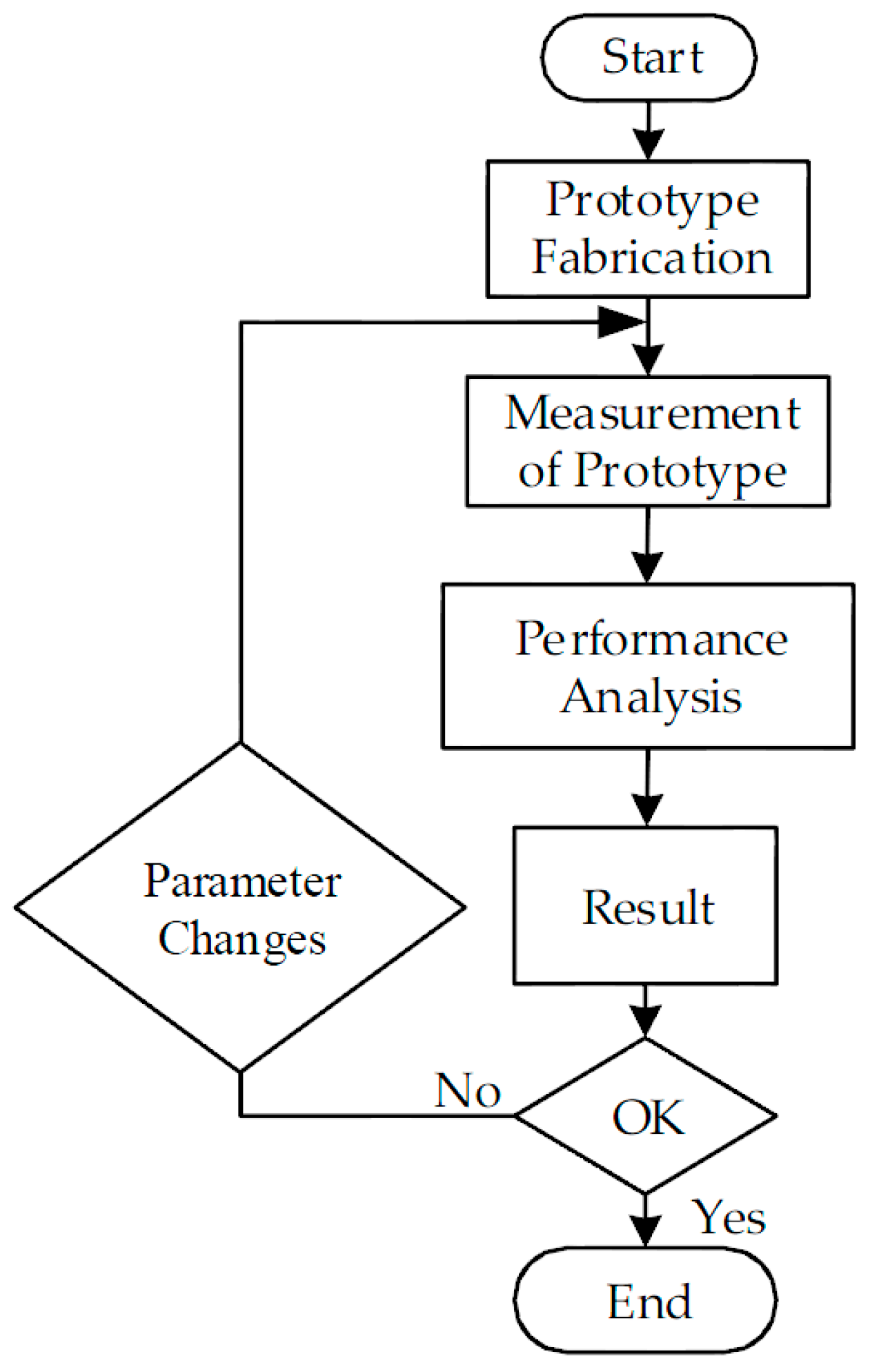
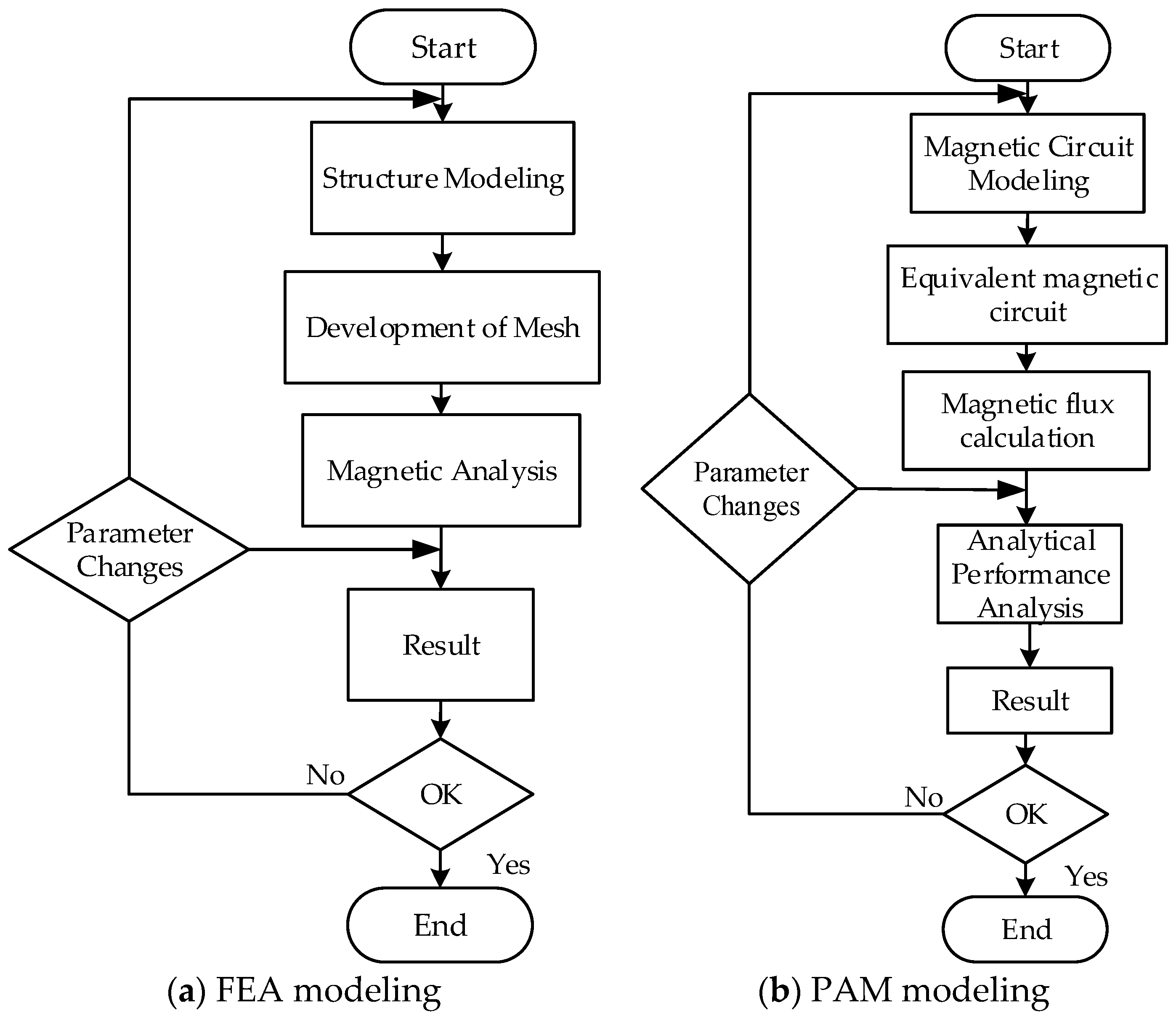
2.1. Flowchart of Research Design
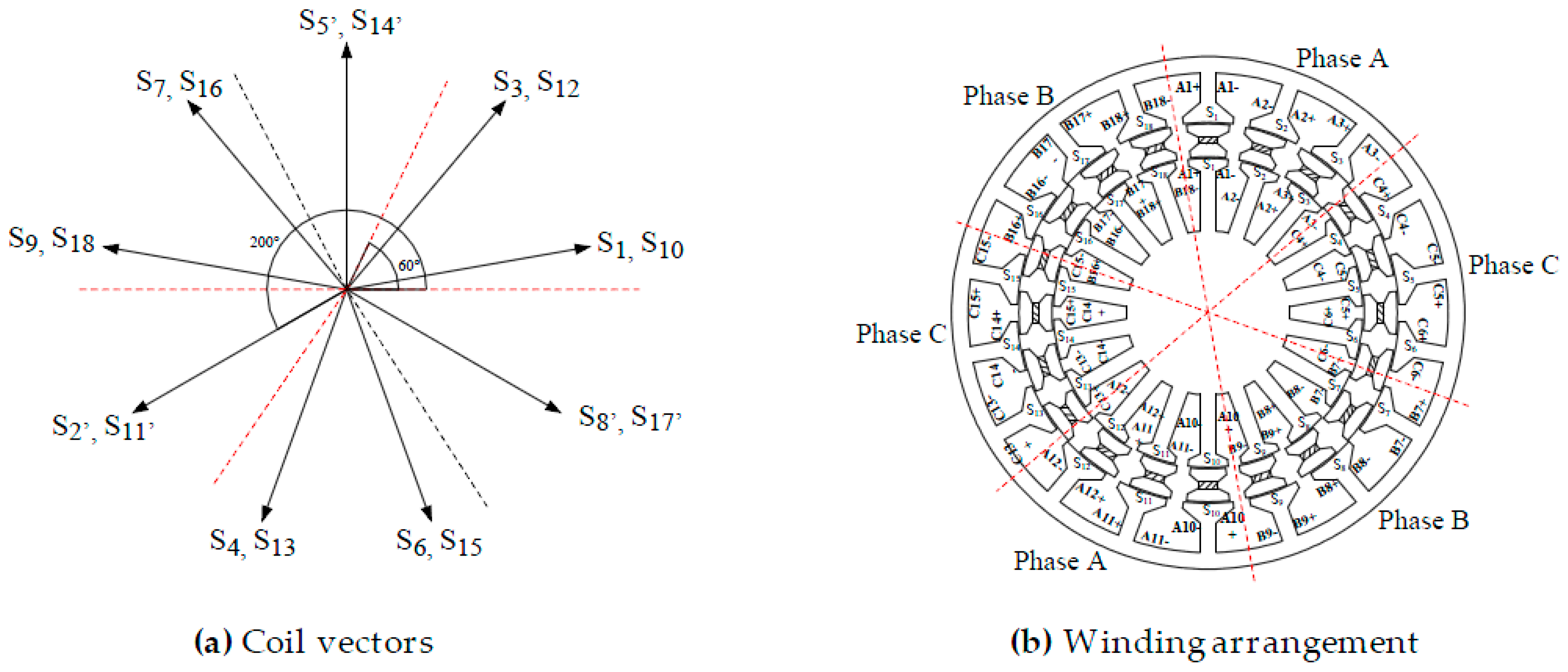
2.2. Coil Vectors and Winding Arrangement
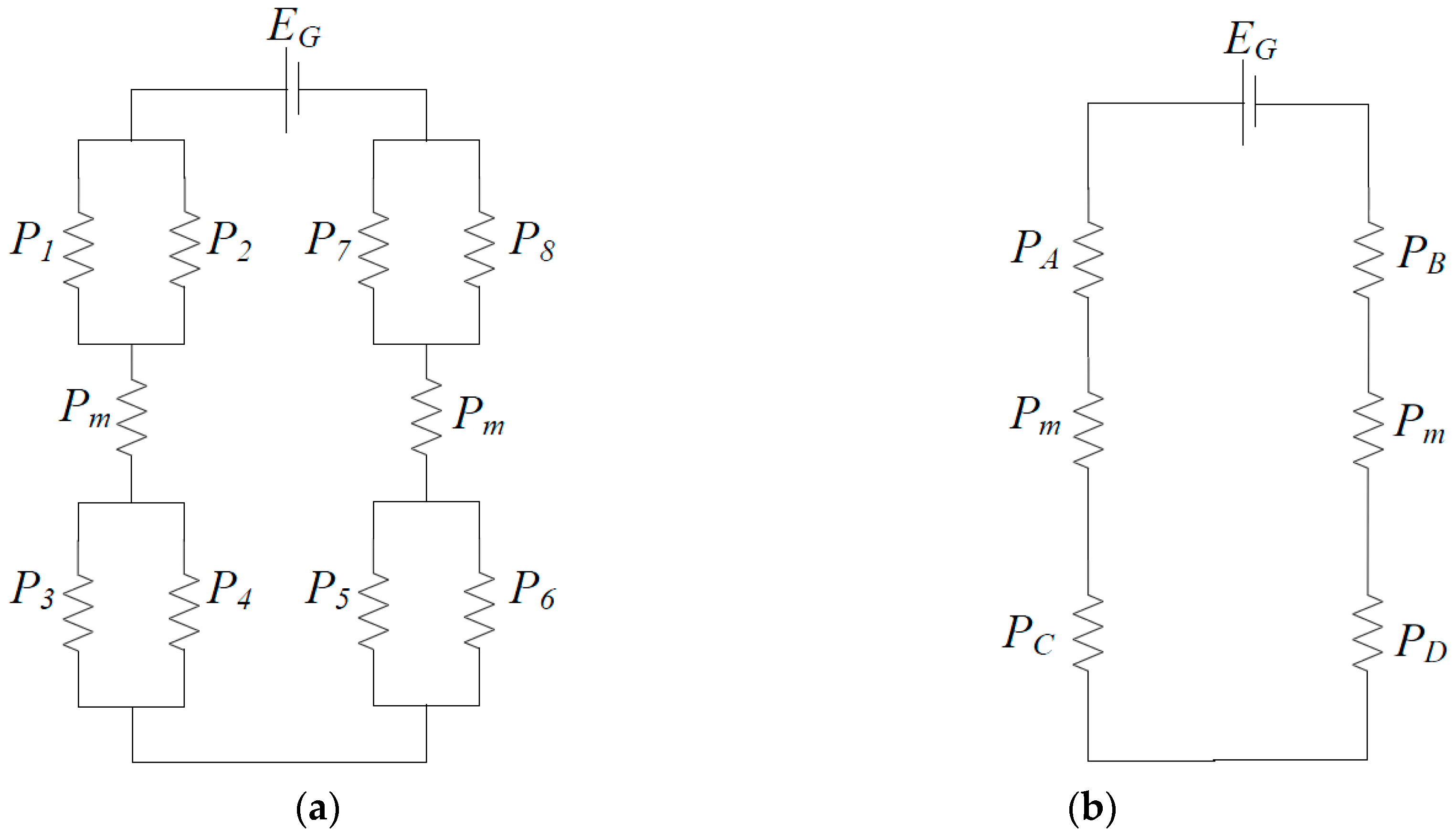
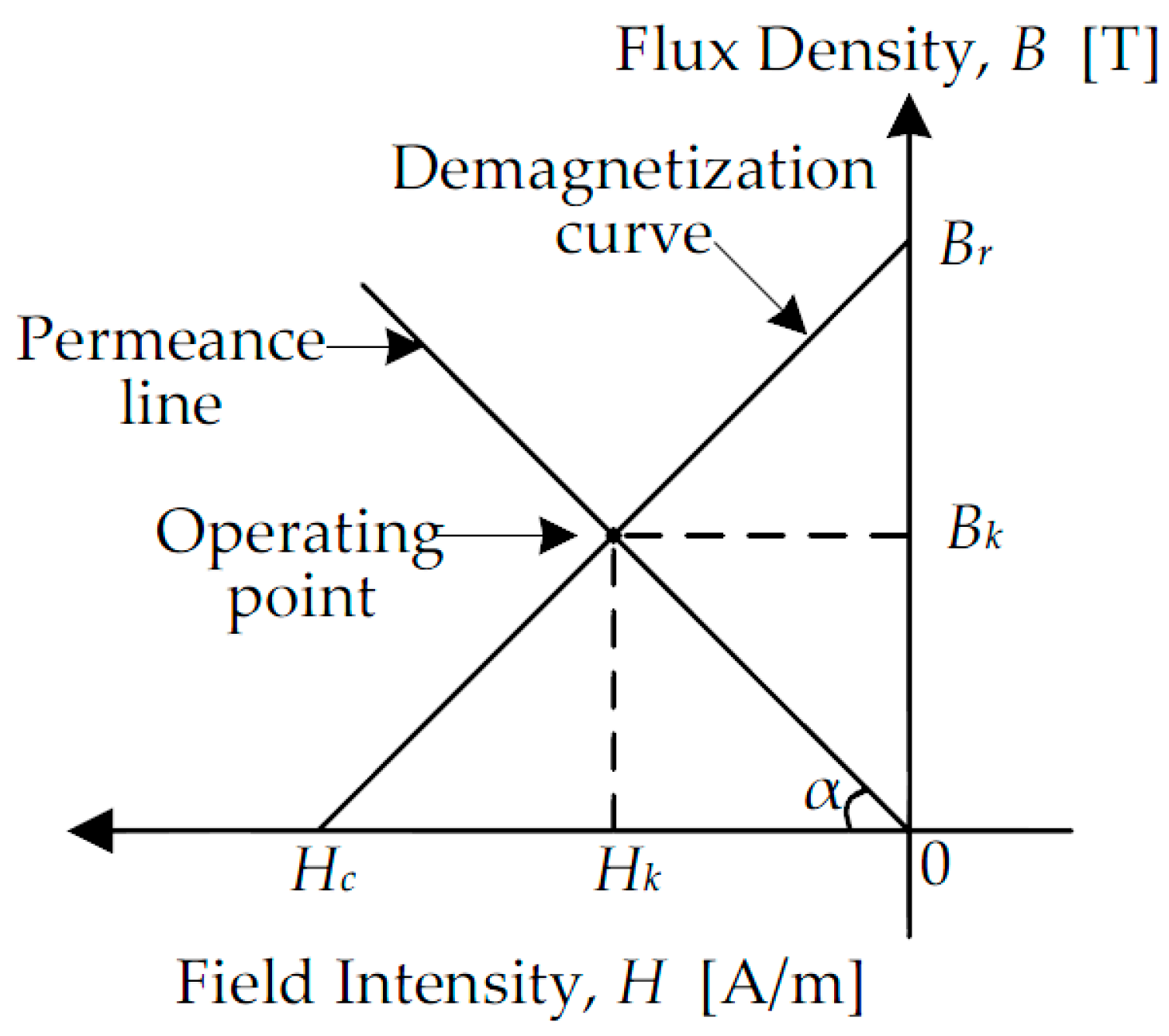
2.3. Permeance Analysis Method (PAM)
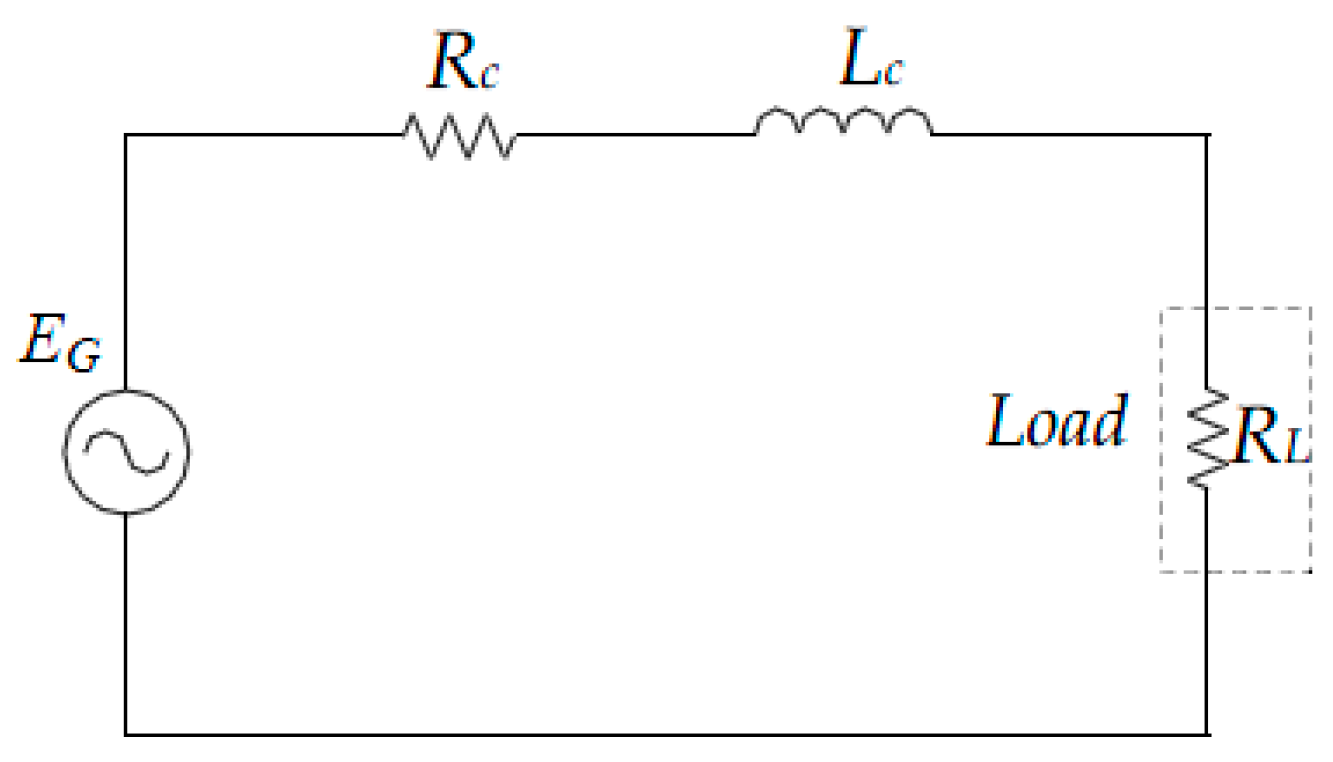
2.4. Output Power Estimation
3. Experimental Testing
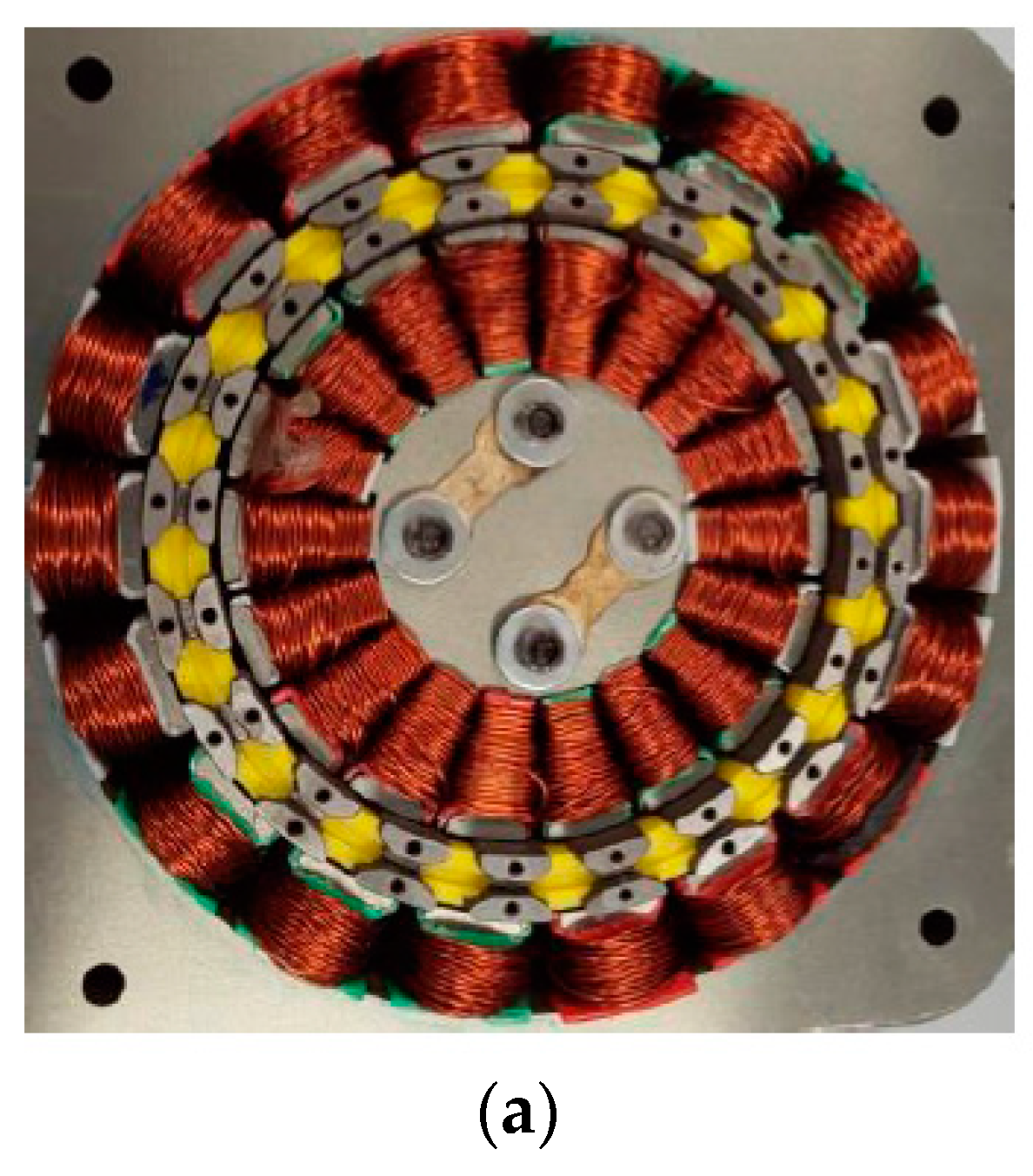
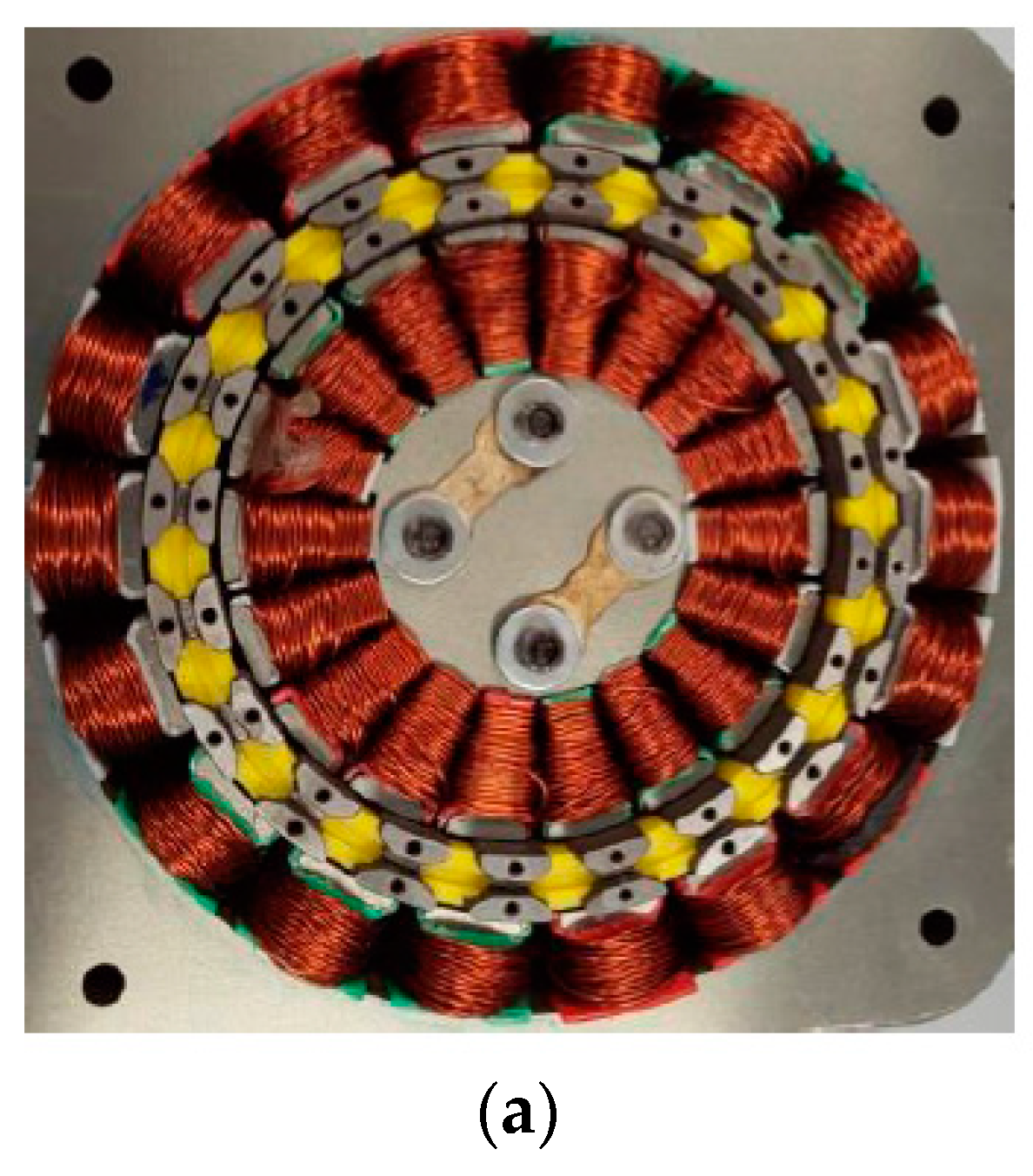
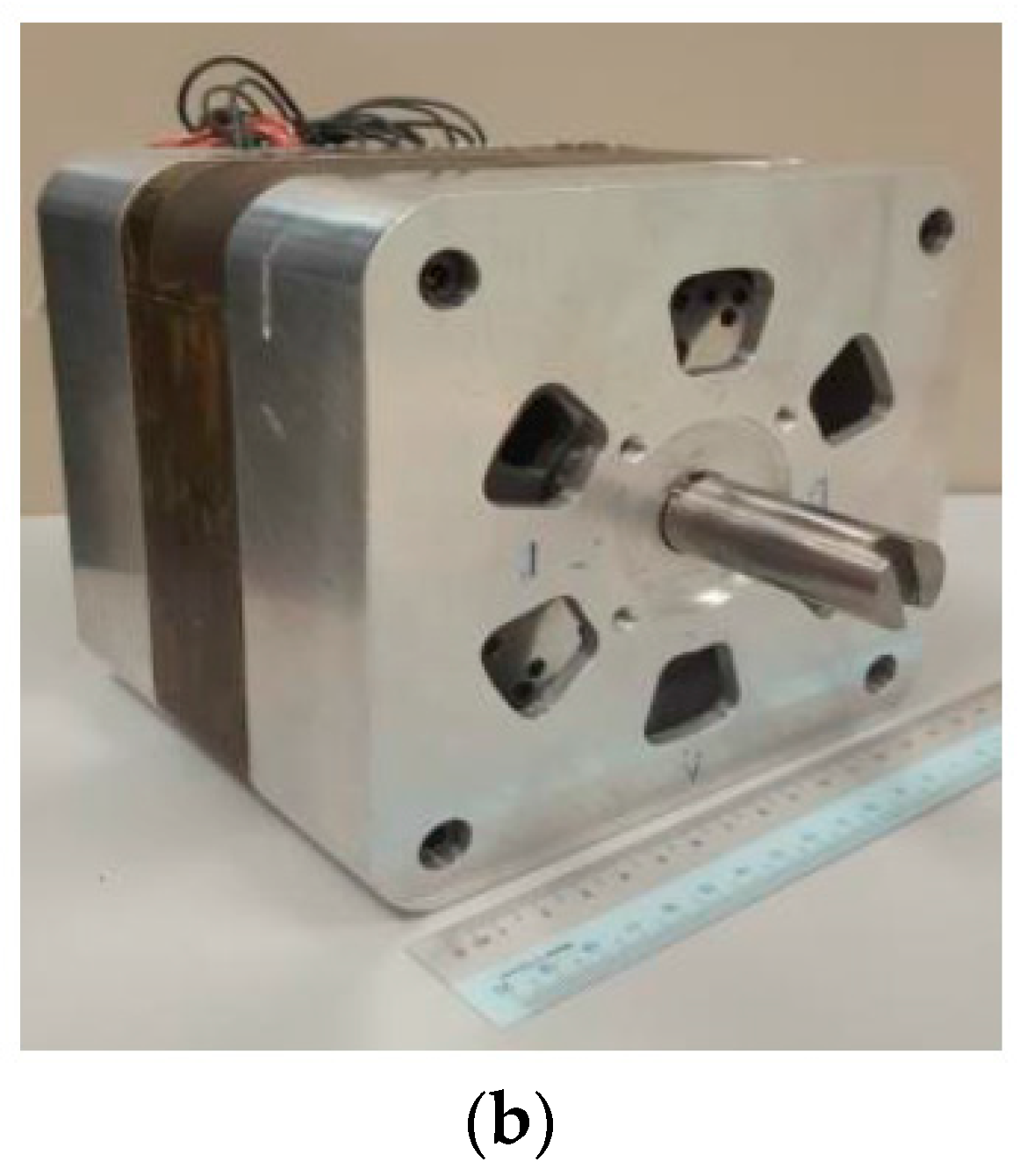
3.1. Prototype Fabrication
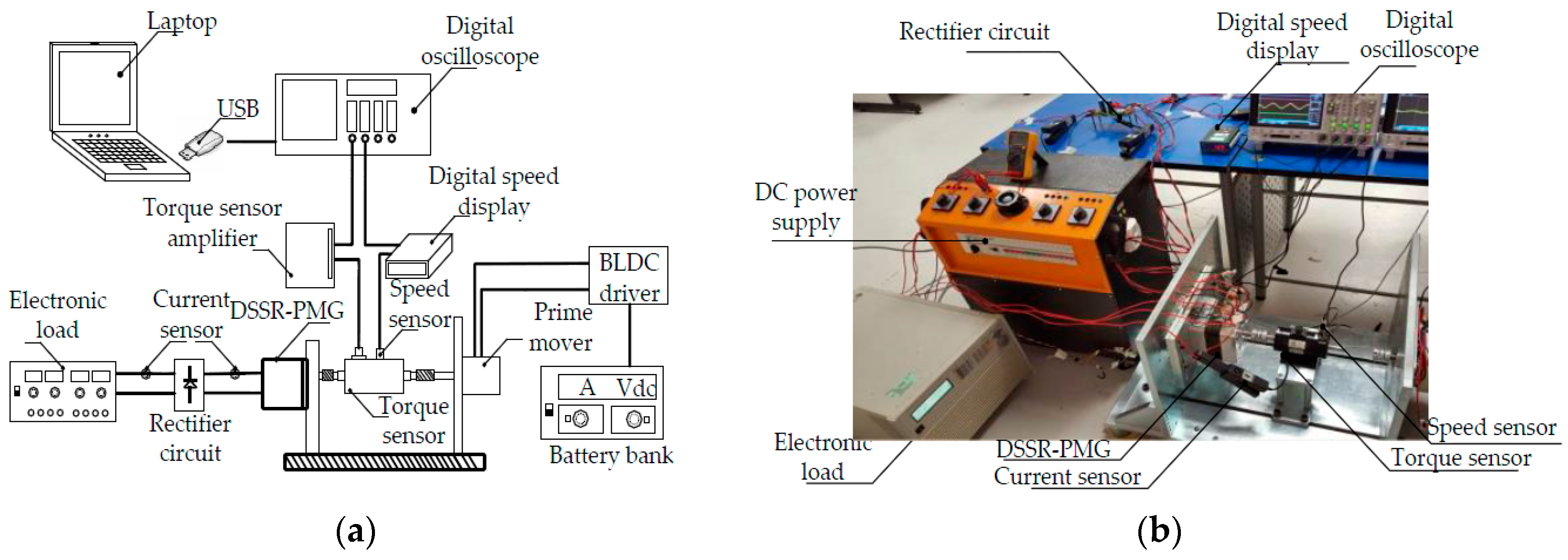
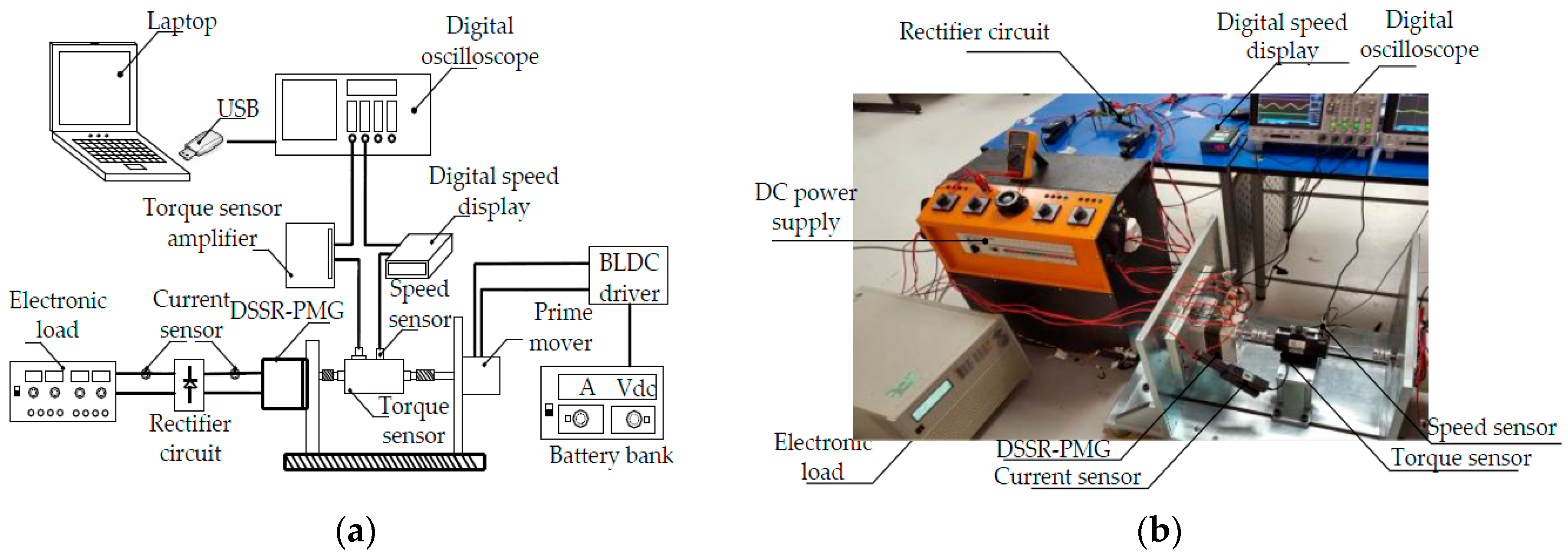
3.2. Experimental Test Bench
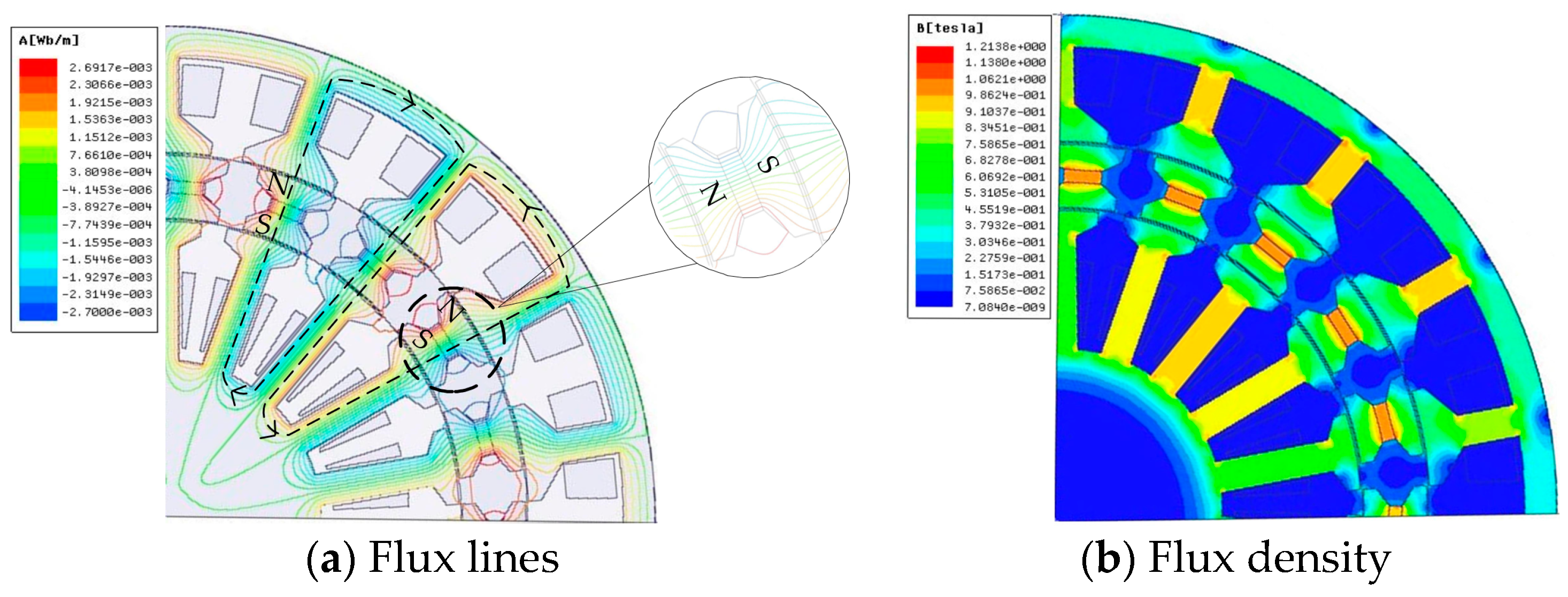
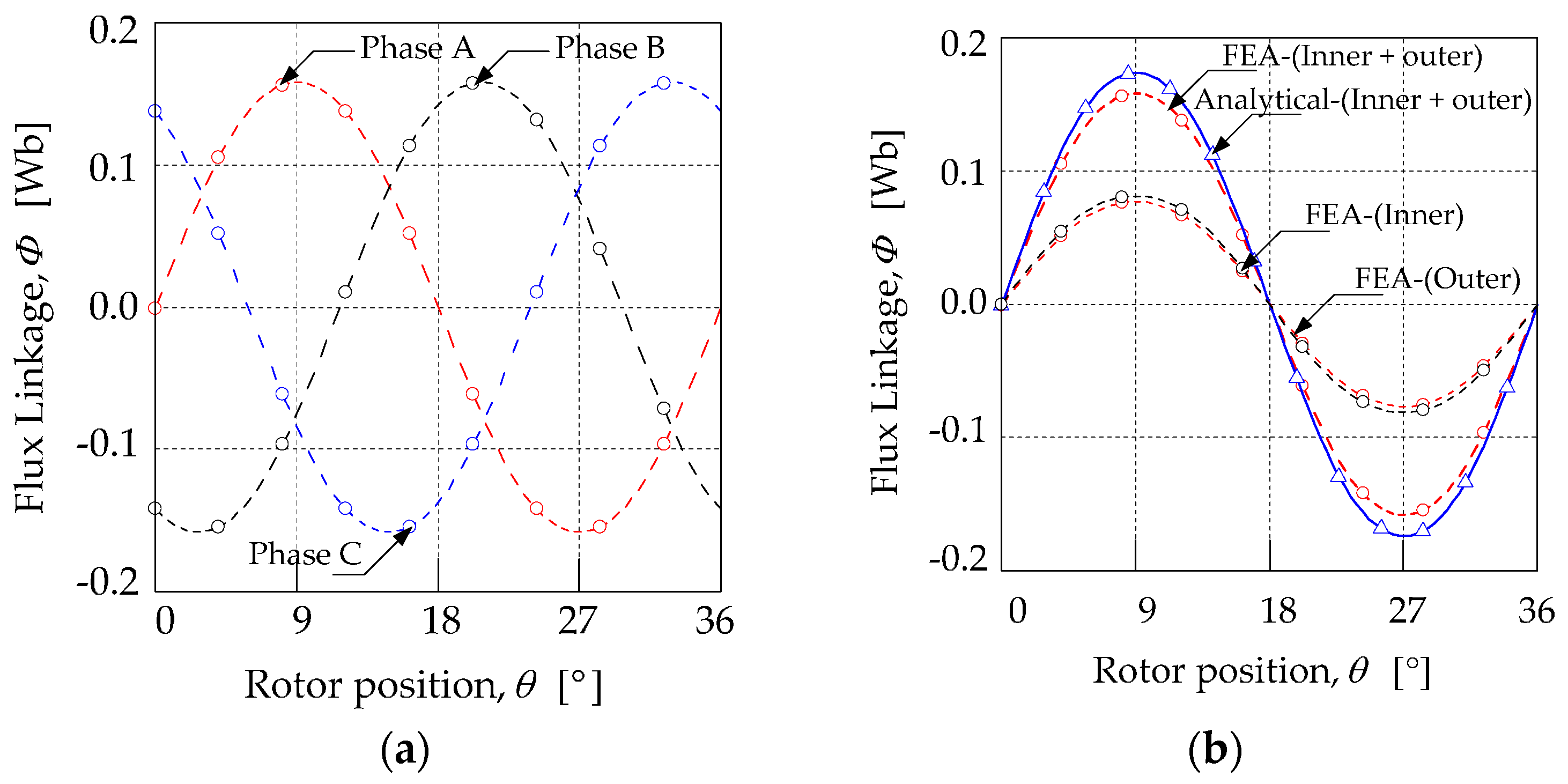
4. Results and Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| DSSR-PMG | Double Stator Slotted Rotor Permanent Magnet Generator |
| PAM | Permeance Analysis Method |
| NdFeB | Neodymium Boron Iron |
| rpm | Rotation per Minute |
| EMF | Electromotive Force |
| FEA | Finite Element Analysis |
| PMG | Permanent Magnet Generator |
| ABS | Acrylonitrile Butadiene Styrene |
| PM | Permanent Magnet |
| Pm | Mechanical input power |
| Po | Output power |
| RL | Resistive load |
| Rc | Coil resistance |
References
- Grauers, A. Efficiency of three wind energy generator systems. IEEE Trans. Energy Convers. 1996, 11, 650–657. [Google Scholar] [CrossRef]
- Chan, T.F.; Lay, L.L. Permanent magnet machines for distributedpower generation: A review. In Proceedings of the IEEE Power Energy Society General Meeting, Tampa, FL, USA, 24–28 June 2007; pp. 1–6.
- Fan, Y.; Chau, K.T.; Cheng, M. A new three-phase doubly salient permanent magnet machine for wind power generation. IEEE Trans. Ind. Appl. 2006, 42, 53–60. [Google Scholar]
- Chen, Y.; Pillay, P.; Khan, A. PM wind generator topologies. IEEE Trans. Ind. Appl. 2005, 41, 1619–1626. [Google Scholar] [CrossRef] [Green Version]
- Feng, C.; Cui, S.; Kang, C. Performance Analysis of Double-stator Starter Generator for the Hybrid Electric Vehicle. In Proceedings of the 12th Symposium on Electromagnetic Launch Technology, Snowbird, UT, USA, 25–28 May 2004; pp. 499–502.
- Chai, F.; Cui, S.; Cheng, S. Performance analysis of double-stator starter generator for the hybrid electric vehicle. IEEE Trans. Magn. 2005, 41, 484–487. [Google Scholar] [CrossRef]
- Vaithilingam, C.A.; Misron, N.; Zare, M.R.; Aris, I.; Marhaban, M.H. Computation of Electromagnetic Torque in a Double Rotor Switched Reluctance Motor Using Flux Tube Methods. Energies 2012, 5, 4008–4026. [Google Scholar] [CrossRef]
- Aravind, C.V.; Grace, I.; Rozita, T.; Rajparthiban, R.; Rajprasad, R.; Wong, Y.V. Universal computer aided design for electrical machines. In Proceedings of the 2012 IEEE 8th International Colloquium on Signal Processing and its Applications (CSPA), Melaka, Malaysia, 23–25 March 2012; pp. 99–104.
- Liu, C.; Chau, K.T.; Jiang, J.Z.; Jian, L. Design and Analysis of a Stator-Doubly-Fed-Doubly-Salient Permanent-Magnet Machine for Automotive Engines. IEEE Trans. Magn. 2006, 42, 1494–1497. [Google Scholar]
- Misron, N.; Suhairi, R.; Firdaus, R.N.; Vaithilingam, C.A.; Wakiwaka, H.; Nirei, M. Comparative Evaluation on Power-Speed Density of Portable Permanent Magnet Generator For Agriculture Applications. Prog. Electromagn. Res. 2012, 129, 345–363. [Google Scholar]
- Liu, C.; Chau, K.T.; Jiang, J.Z.; Jian, L. Design a new outer-rotor permanent magnet hybrid machine for wind power generation. IEEE Trans. Magn. 2008, 44, 3470–3472. [Google Scholar]
- Niu, S.; Chau, K.T.; Jiang, J.Z.; Liu, C. Design and Control of a New Double-Stator Cup-Rotor Permanent-Magnet Machine for Wind Power Generation. IEEE Trans. Magn. 2007, 43, 2501–2503. [Google Scholar] [CrossRef] [Green Version]
- Firdaus, R.N.; Misron, N.; Vaithilingam, C.A.; Nirei, M.; Hiroyuki, W. Improvement of Energy Density in Single Stator Interior Permanent Magnet Using Double Stator Topology. Math. Probl. Eng. 2014, 2014, 787382. [Google Scholar] [CrossRef]
- Delforge, C.; Lemaire-Semail, B. Induction machine modelling using finite element and permeance network methods. IEEE Trans. Magn. 1992, 42, 2092–2095. [Google Scholar]
- Touati, S.; Ibtiouen, R.; Touhami, O.; Djerdir, A. Experimental investigation and optimization of permanent magnet motor based on coupling boundary element method with permeances network. Prog. Electromagn. Res. 2011, 111, 71–90. [Google Scholar] [CrossRef]
- Cros, J.; Viarouge, P. Synthesis of high performance PM motors with concentrated windings. IEEE Trans. Energy Convers. 2002, 17, 248–253. [Google Scholar] [CrossRef]
- Magnussen, F.; Sadarangani, C. Winding factors and Joule losses of permanent magnet machines with concentrated windings. In Proceedings of the IEEE International Electric Machines and Drives Conference (IEMDC’03), Madison, WI, USA, 1–4 June 2003; Volume 1, pp. 333–339.
- Chung, S.; Kim, J.; Koo, D.; Woo, B.; Hong, D.; and Lee, J. Fractional slot concentrated winding permanent magnet synchronous machine with consequent pole rotor for low speed direct drive. IEEE Trans. Magn. 2012, 48, 2965–2968. [Google Scholar] [CrossRef]
- Paulsamy, S. Reduction of Cogging Torque in Dual Rotor Permanent Magnet Generator for Direct Coupled Wind Energy Systems. Sci. World J. 2014, 2014, 987062. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | DSSR-PMG |
|---|---|
| Outer stator diameter (mm) | 156 |
| Inner stator diameter (mm) | 86 |
| PM volume (m3) | 6.3 × 10−7 |
| PM height, hm (mm) | 6 |
| PM width, wm (mm) | 2 |
| Coil size (mm) | 0.7 (0.1 mm insulation) |
| Stack length (mm) | 52.5 |
| Outer air gap, go (mm) | 0.5 |
| Inner air gap, gi (mm) | 0.5 |
| No. of turns of inner coil, Ni | 55 |
| No. of turns of outer coil, No | 55 |
| Stator tooth face angle (°) | 15 |
| Outer stator yoke height, hco (mm) | 12 |
| Inner stator yoke height, hci (mm) | 15 |
| Phase | Polarity | |
|---|---|---|
| Positive | Negative | |
| A | S1, S3, S10, S12 | S2′, S11′ |
| B | S7, S9, S16, S18 | S8′, S17′ |
| C | S4, S6, S13, S15 | S5′, S14′ |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad, S.R.C.; Othman, R.N.F.K.R.; Othman, M.N.; Zuki, N.A.M.; Shukor, F.A.A.; Isa, S.Z.M.; Ibrahim, Z.; Vaithilingam, C.A. Modeling and Analysis of Double Stator Slotted Rotor Permanent Magnet Generator. Energies 2017, 10, 411. https://doi.org/10.3390/en10030411
Ahmad SRC, Othman RNFKR, Othman MN, Zuki NAM, Shukor FAA, Isa SZM, Ibrahim Z, Vaithilingam CA. Modeling and Analysis of Double Stator Slotted Rotor Permanent Magnet Generator. Energies. 2017; 10(3):411. https://doi.org/10.3390/en10030411
Chicago/Turabian StyleAhmad, Suhairi Rizuan Che, Raja Nor Firdaus Kashfi Raja Othman, Md Nazri Othman, Nor Aishah Md Zuki, Fairul Azhar Abdul Shukor, Siti Zulaika Mat Isa, Zulkifilie Ibrahim, and Chockalingam Aravind Vaithilingam. 2017. "Modeling and Analysis of Double Stator Slotted Rotor Permanent Magnet Generator" Energies 10, no. 3: 411. https://doi.org/10.3390/en10030411