1. Introduction
To achieve the purpose of sustainable development, attention is being paid to clean energy resources [
1,
2]. Among all the renewable resources, wind energy has relatively high competitiveness [
3,
4]. It is estimated that the proportion of wind energy in the total power generation all over the world by 2050 will be 15–18% [
5]. In large-scale wind turbine penetrated power systems, doubly-fed induction generators (DFIGs) are usually applied because of their variable speed constant frequency (VSCF) operating ability [
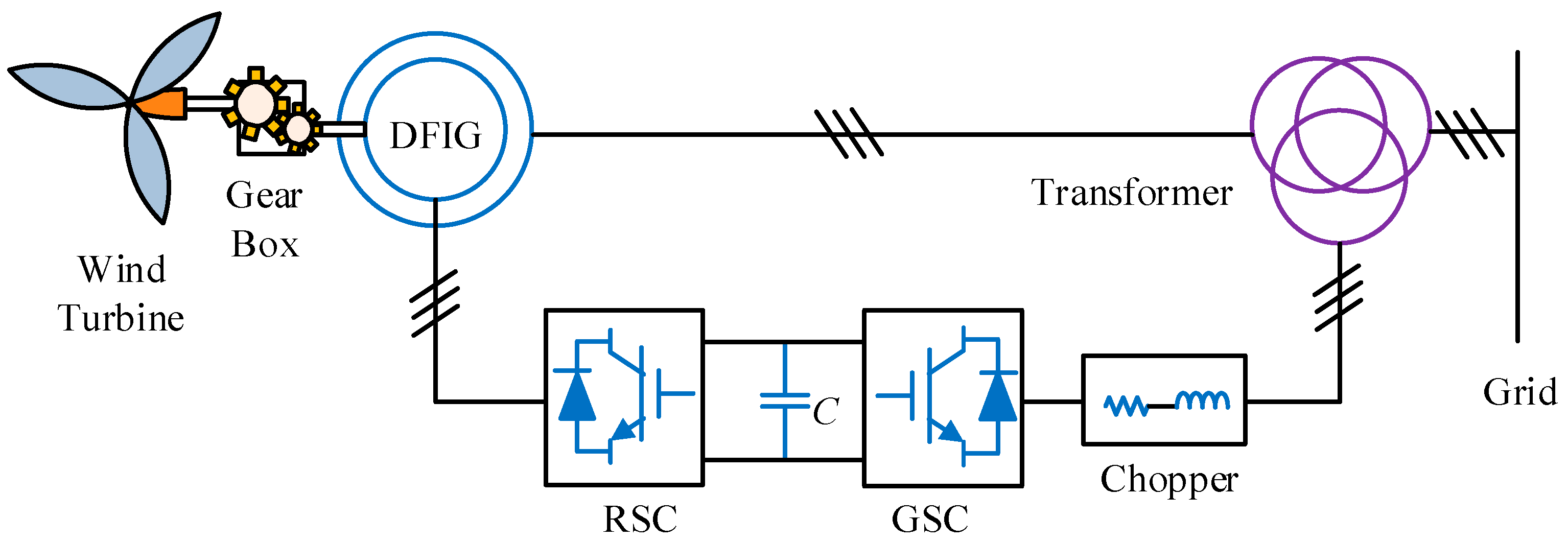
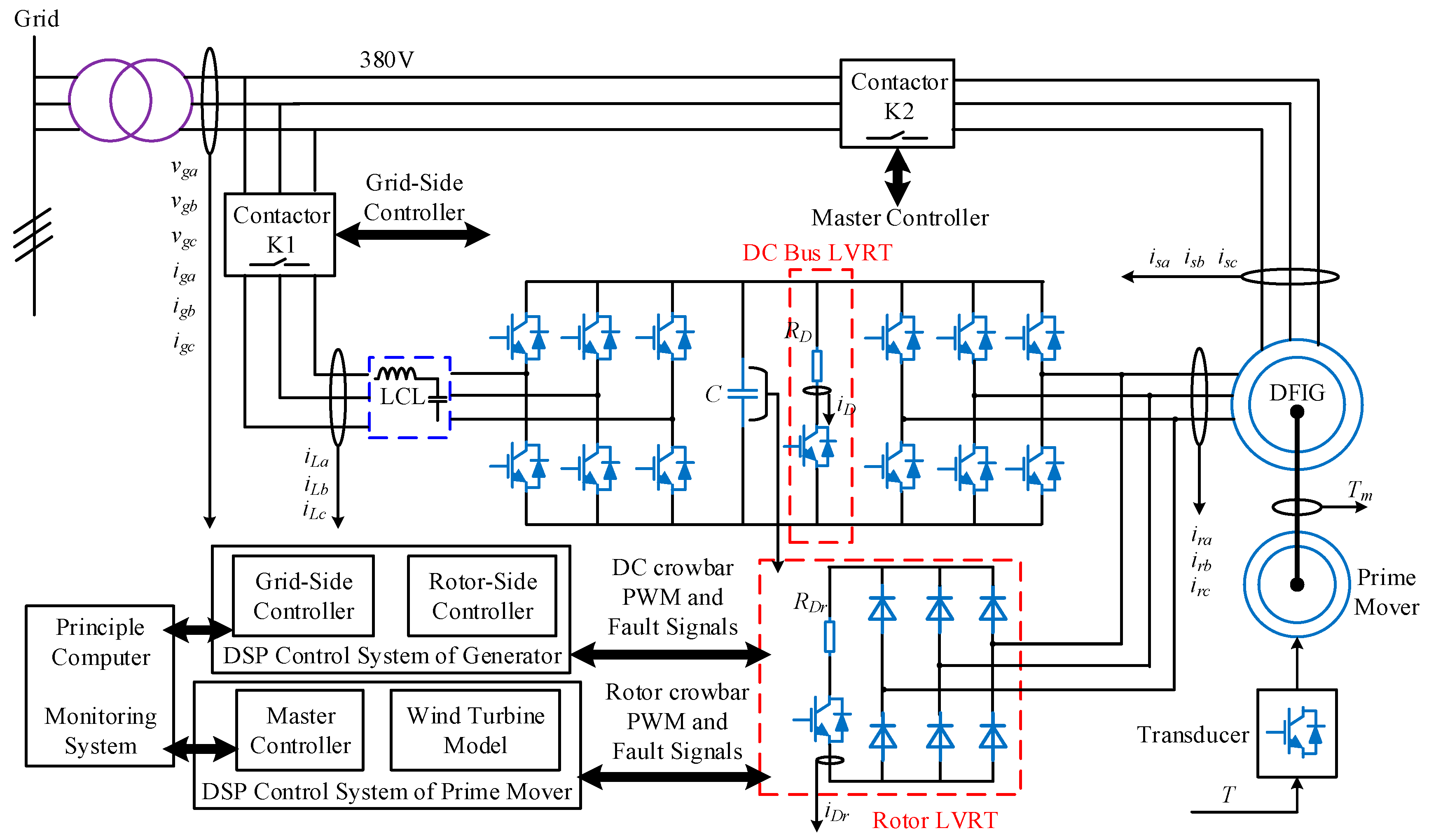
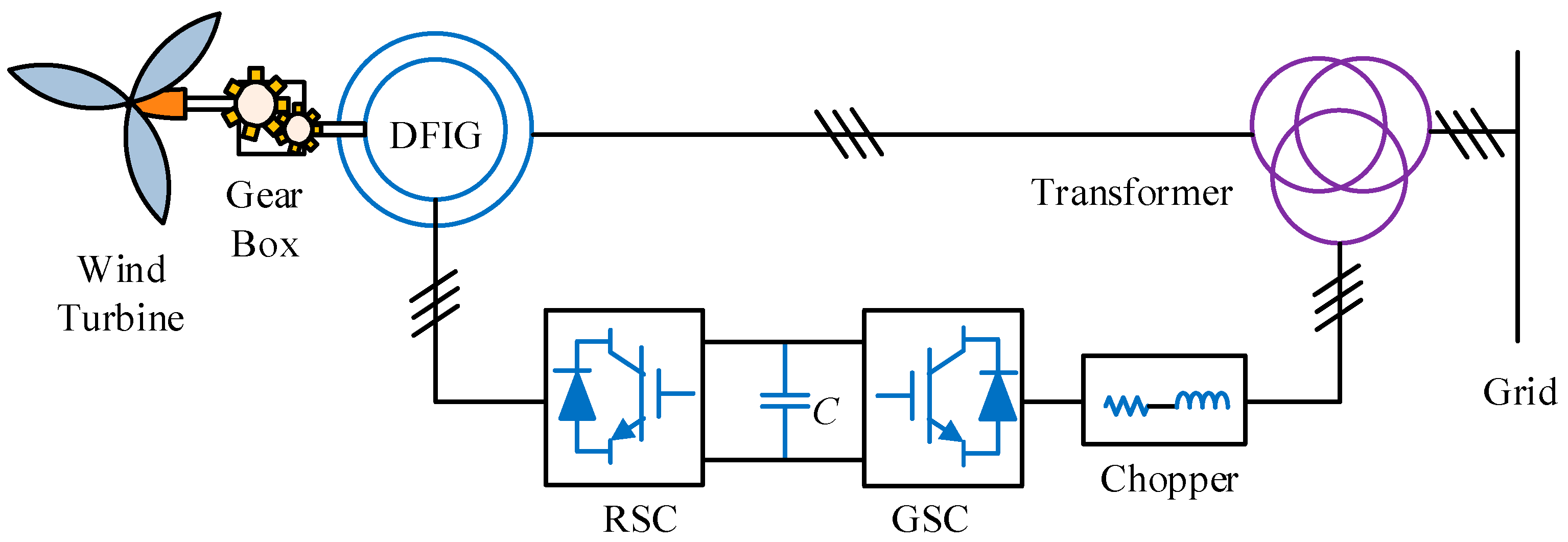
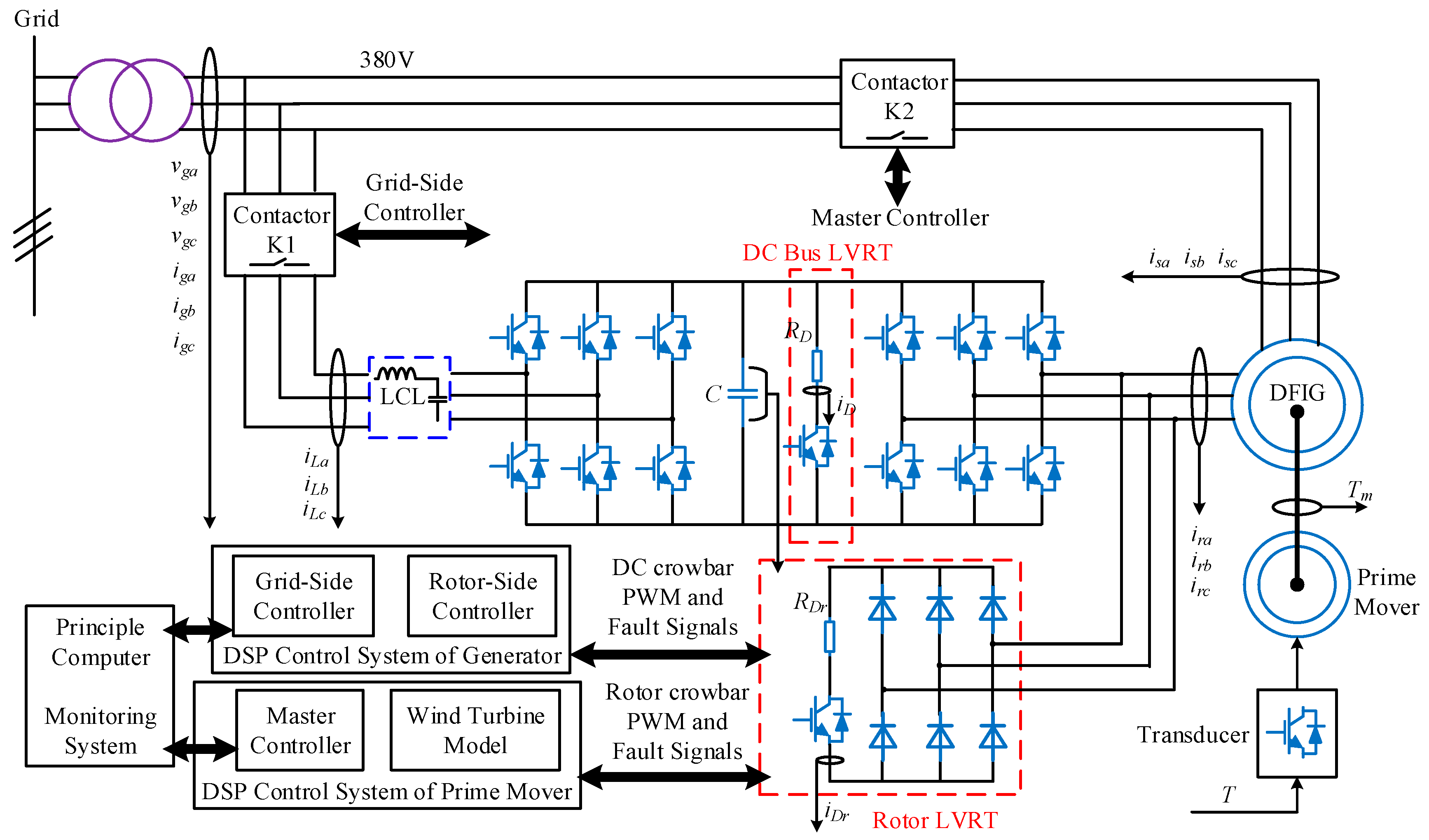
6]. The commonly used configuration of a DFIG-based power generation system is shown in
Figure 1. The stator of DFIG is directly connected to the grid, while the rotor is connected to the grid through a back-to-back power electronic converter, which is composed of a rotor-side converter (RSC) and a grid-side converter (GSC). Power electronic pulse width modulation (PWM) converters are crucial parts in DFIG-based wind power generation systems, while the fragility of the power electronic devices in these converters leads to several issues. According to [
7], 21% of the faults in power converters are caused by breakdown of power electronic devices. For example, if one of the switches in a three-phase power converter is broken, normal regulation of power flows is lost. In this case, the corresponding doubly-fed induction generator-based wind turbine (DFIG-WT) has to disconnect from the grid [
8,
9]. For offshore wind turbines (WTs), maintenance is restricted because of bad weather conditions and high maintenance costs, in which case the faulty WT can stop working for several months [
10]. Since the proportion of offshore wind farms in the EU is increasing due to abundant wind resources on the sea, along with the non-negligible status of wind energy in the near future, it is necessary to improve the fault-tolerant ability of WTs [
5,
10].
The four-switch three-phase (FSTP) topology is one of the most widely used fault-tolerant converter topologies since no surplus switches are required [
11]. After one of the semiconductor switches breaks down and an open circuit is formed, the faulty phase is connected to the midpoint of the DC bus by splitting the DC-link capacitor [
12,
13]. Compared with the normal six-switch three-phase (SSTP) topology, the number of switches and parallel diodes decreases which reduces the cost and conduction losses. However, there are several shortcomings for FSTP converters. For examples, the voltage gain decreases and the increased current rating occurs when the output power remains the same, and the current in the faulty phase results in DC-link capacitor voltage deviation [
12]. In addition, the voltage utilization rate is only half of that when applying an SSTP converter [
13]. In order to improve the performance of an FSTP converter, substantial researches were carried out.
SSTP converters are widely applied in the fields of active power filters (APFs) and motor drives, and the fault-tolerant FSTP converters in these applications have been discussed in a variety of papers. Literatures [
14,
15,
16,
17] concentrated on different control strategies for FSTP induction motors (IMs). In [
18,
19,
20,
21], the researchers focused on the applications of FSTP topologies in brushless DC (BLDC) [
18,
21] and DC motors [
19,
20], however, the machines mentioned above are not usually applied in wind energy conversion systems. One of the commonly used generators in the wind industry is the permanent magnet synchronous generator (PMSG), and in [
22,
23,
24] the authors studied PMSG drives in FSTP converters for WT applications, and fault tolerance was considered. However, the heavy weight and high cost of a PMSG are the main obstacles for its development in wind energy industries.
Compared with investigating the control strategies for FSTP converters, adjustments in PWM techniques influence the quality of the three-phase currents by a greater extent. An adaptive PWM strategy was proposed in [
25] to decrease the degree of unbalance between voltages and currents, and sector identification was omitted in the algorithm. In [
26], the researchers developed an optimized modulation approach for the post-fault PWM rectifiers to eliminate the DC voltage unbalance by minimizing capacitor currents. In addition, the DC-link capacitor current stress in the post-fault grid-connected three-phase rectifier is reduced by a space-vector-based hybrid PWM strategy in [
27]. Moreover, the zero voltage distribution in FSTP rectifier was studied for performance analysis [
28] in terms of the AC current ripple, the common voltage (CMV) and the current stress on the DC-link capacitor. Although the modulation techniques and control strategies described in [
25,
26,
27,
28] are applicable in converters, the performance of DFIG-WTs with modified PWM techniques has not been studied.
In recent years, there are some references concentrating on fault detection and isolation techniques for DFIG-WTs. In [
29], the authors proposed a fault-tolerant control method for various sensors used in DFIG. Although the response is fast, both the observer algorithm and hardware design are complex. The controllability of a DFIG-WT is maintained in [
30] by using a passive resistance network when the grid voltage sags. The researchers in [
31] proposed a nine-switch grid-side converter to seamlessly ride through different categories of grid faults, while fragility of semiconductor switches was not considered. System reconfiguration for a doubly fed induction machine (DFIM) was presented by applying FSTP topologies for GSC and RSC to sustain the normal operation of WT [
32]. However, it utilized the method in [
33] for eliminating the DC-link capacitor voltage distortion, and no further improvement in the PWM technique was conducted.
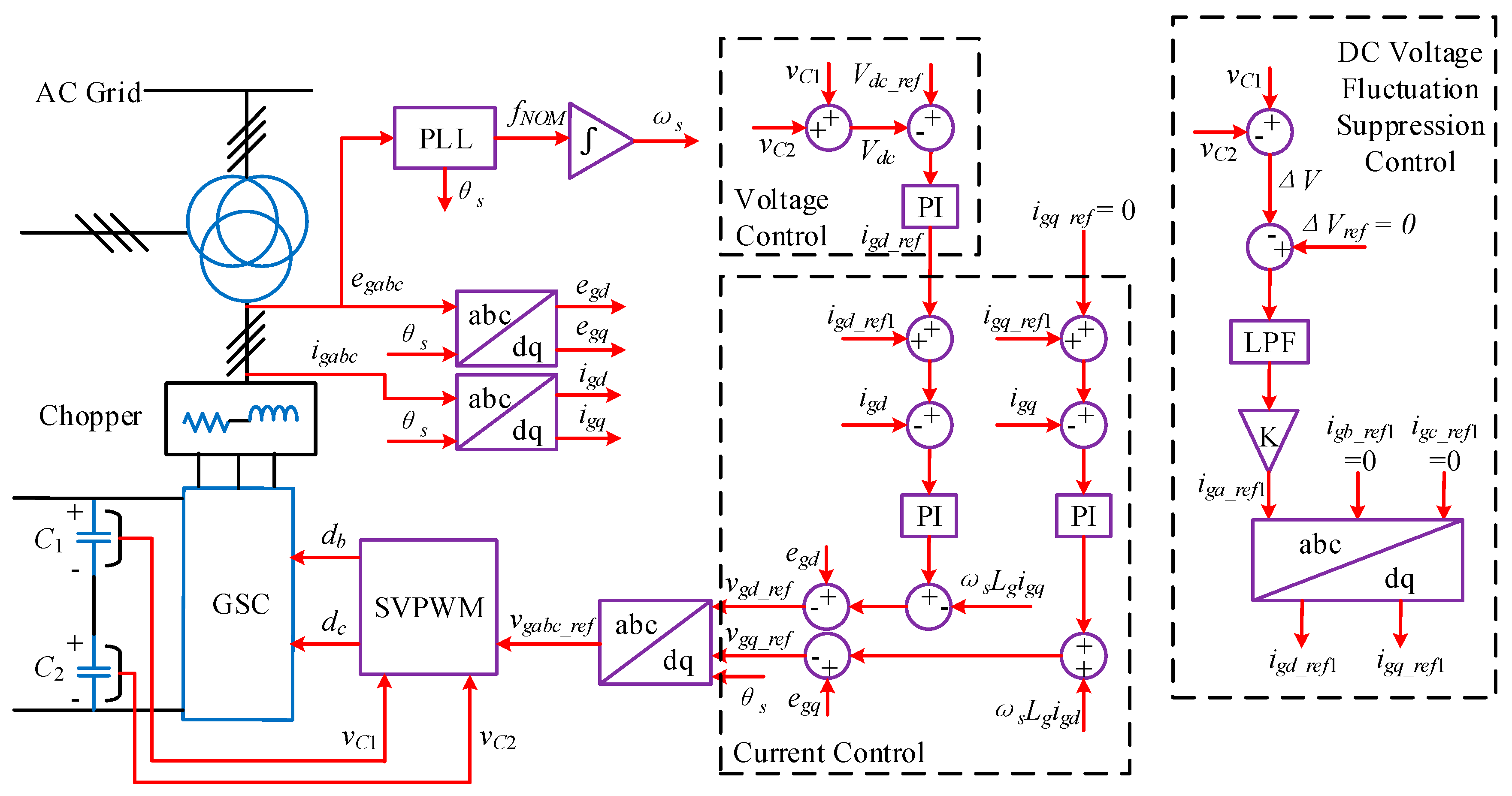
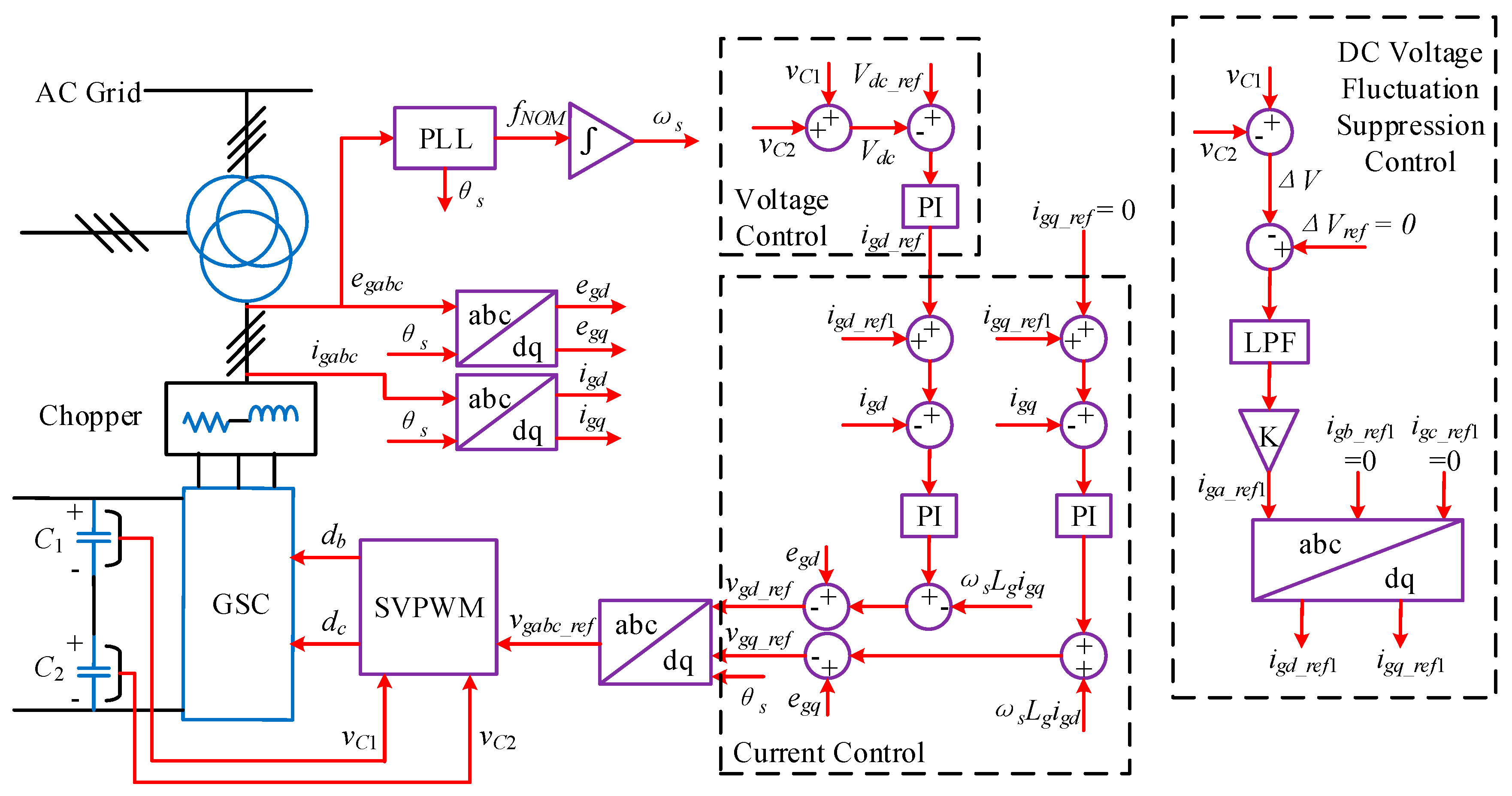
In DFIG-WTs, the main functions of GSC are keeping the DC-bus voltage steady, making the grid-side three-phase currents sinusoidal and controlling the output power factor. This paper aims to make the performance of the FSTP GSC acceptable for a DFIG-WT to constantly supply power to the grid with different external disturbances. Different from the modelling methods used in previous researches for either rectifiers [
26] or inverters [
25], bidirectional power flows should be taken into consideration for the modelling of FSTP GSC in DFIG-WT. Besides, compensation for capacitor voltage deviation has to be included since charging and discharging processes occur, respectively, for the two DC-link capacitors in some switching states, and the switching frequency should be limited in practice. In previous studies, the researchers either investigated only the performance of FSTP converters by modified modulation techniques and control strategies [
12,
13,
25,
26,
27,
28], or make comparisons between pre-fault and post-fault performances of the machine without further modifications in modulation techniques [
32]. In addition, mathematical analysis on the relationship between the wind speed and the mechanical performance of FSTP GSC-based DFIG-WT is not available from the literatures. In this work, converter reconfiguration, simplified SVPWM technique, varying wind speed and grid voltage sags are considered to demonstrate the reliability of FSTP GSC based DFIG-WT, which have not been comprehensively analyzed in previous researches to the best of the authors’ knowledge.
The paper is organized in the following structure: in
Section 2, modelling of the fault-tolerant FSTP GSC is illustrated according to two DFIG operational modes. The SVPWM technique is explained in
Section 3 for FSTP GSC and it is simplified according to mathematical deductions. Control strategies and controller design of the proposed GSC in DFIG-WT are illustrated in
Section 4. A system-level analysis is presented in
Section 5, and the mechanical performance of the DFIG is explained with respect to wind speed change. Simulation results are reported in
Section 6 with a discussion on the performance of both topologies for different external conditions. In
Section 7, experimental results are illustrated to demonstrate the system reliability. In
Section 8, conclusions are given.
2. FSTP GSC Modelling
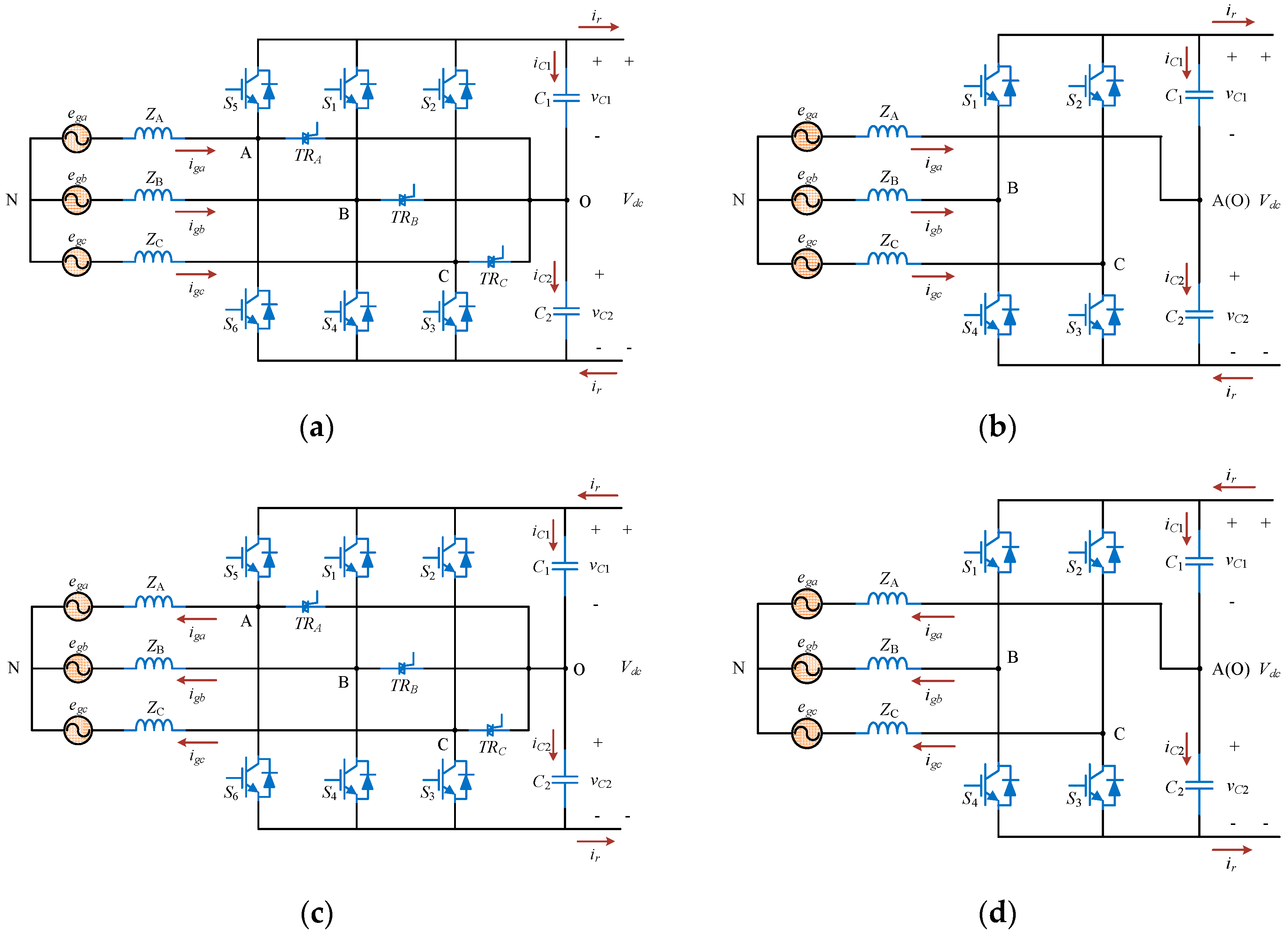
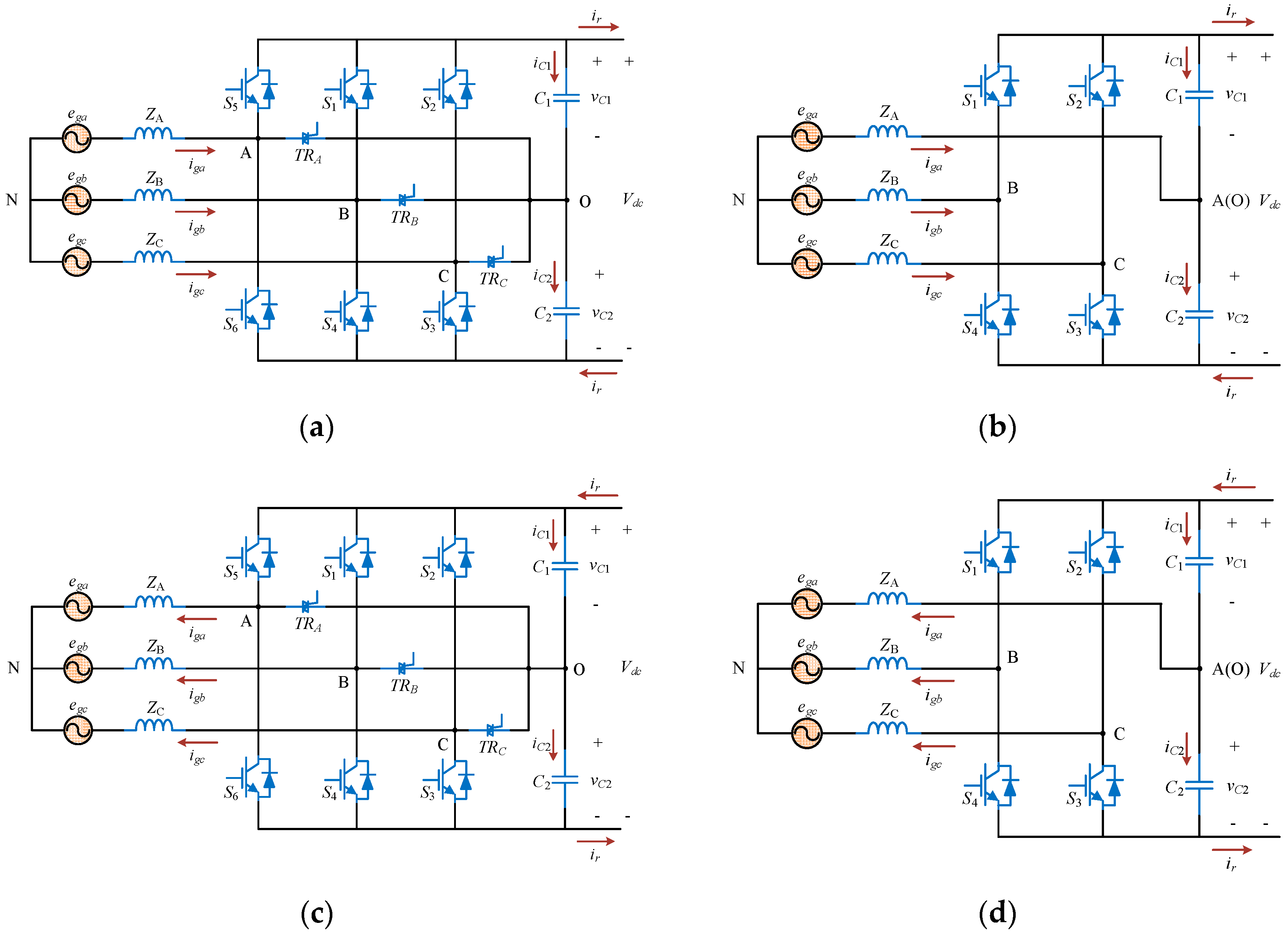
The fault-tolerant topologies for pre-fault and post-fault GSC under different operational modes are shown in
Figure 2. Six IGBTs with parallel diodes (
S1 to
S6) are the switching devices. In this paper, the three-phase grid is assumed balanced (
ZA =
ZB =
ZC). The DC-link capacitors
C1 and
C2 are usually identical (
C1 =
C2 =
CDC) [
26].
TRA,
TRB and
TRC are triacs, and the triac in the faulty phase is triggered and the faulty bridge arm is isolated by connecting the corresponding phase to the midpoint of DC bus. For example, when
S5 or
S6 breaks down, the equivalent FSTP converter circuit is shown in
Figure 2b,d. With appropriate control strategies for the remaining four switches, normal operation of the converter can be maintained after the fault.
In this paper, the fault situation mentioned above is considered, whose faulty phase is phase A. When the fault happens in phase B or C, the situation is the same, which has been identified in [
34]. The switching states of the rest switches (
S1 to
S4) are represented by 1 or 0, where 1 indicates on and 0 means off. The switches in the same bridge arm are always in the complementary states for each other, and the relationships can be expressed as shown below:
It is easier to distinguish the switching states of the bridge arms B and C by using the variables
Sb and
Sc.
Sb = 1 denotes that
S1 is on and
S4 is off, and
Sb = 0 represents the case that
S1 is off and
S4 is on.
Sc = 1 indicates that
S2 is on and
S3 is off, and
Sc = 0 means that
S2 is off and
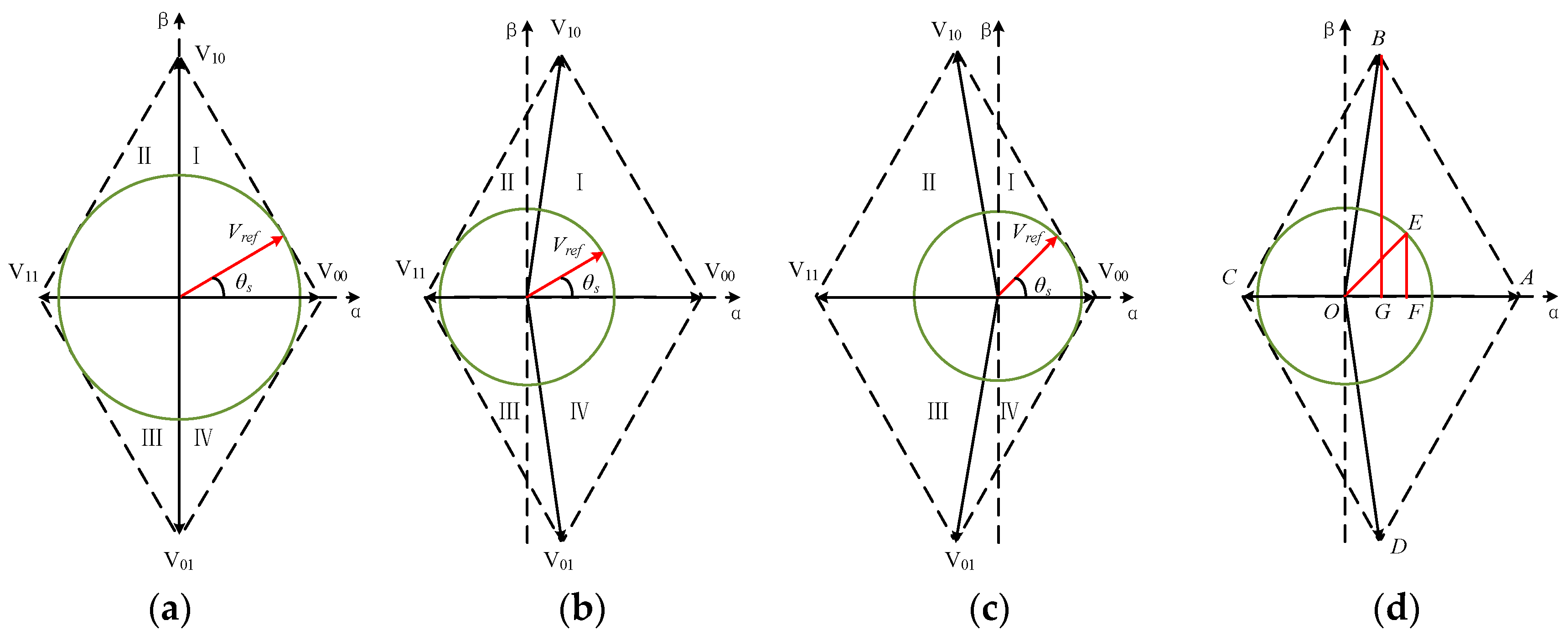
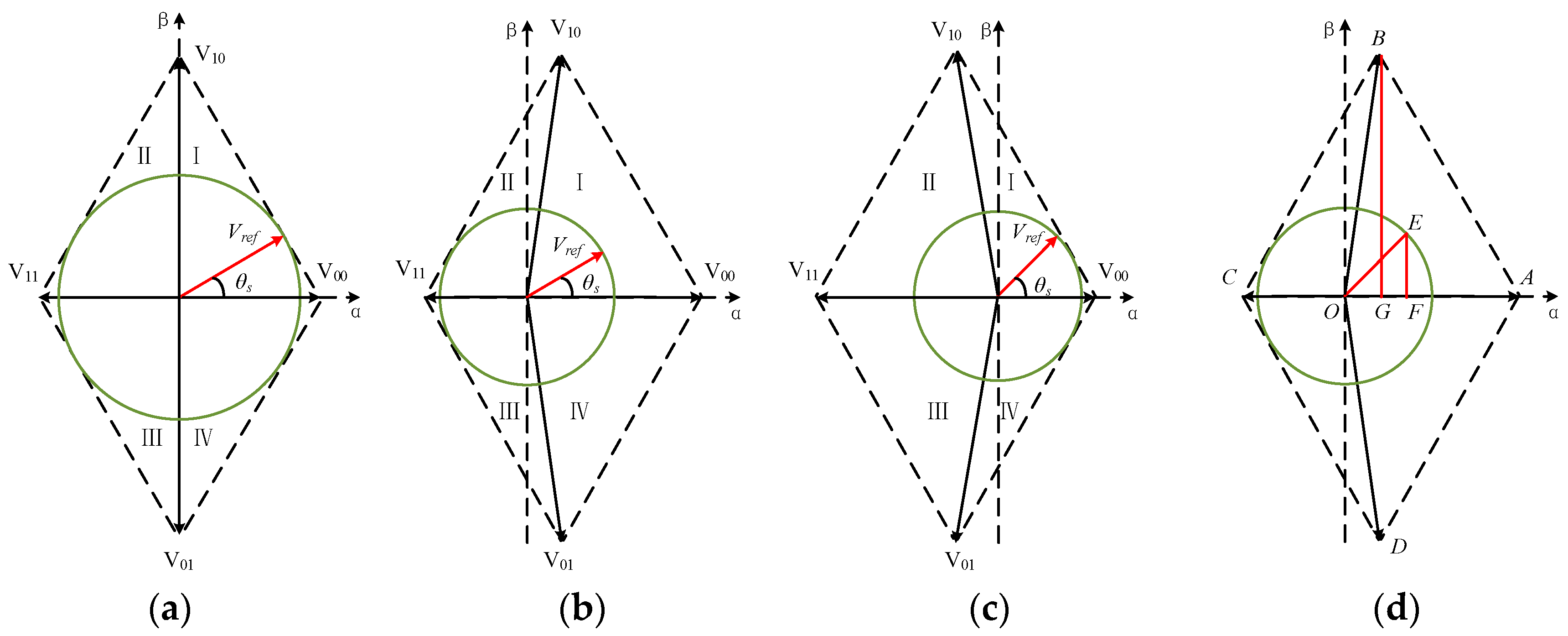
S3 is on. There are totally four combinations of the switching states of
Sb and
Sc, and four basic vectors (namely V
00, V
10, (V
11 and V
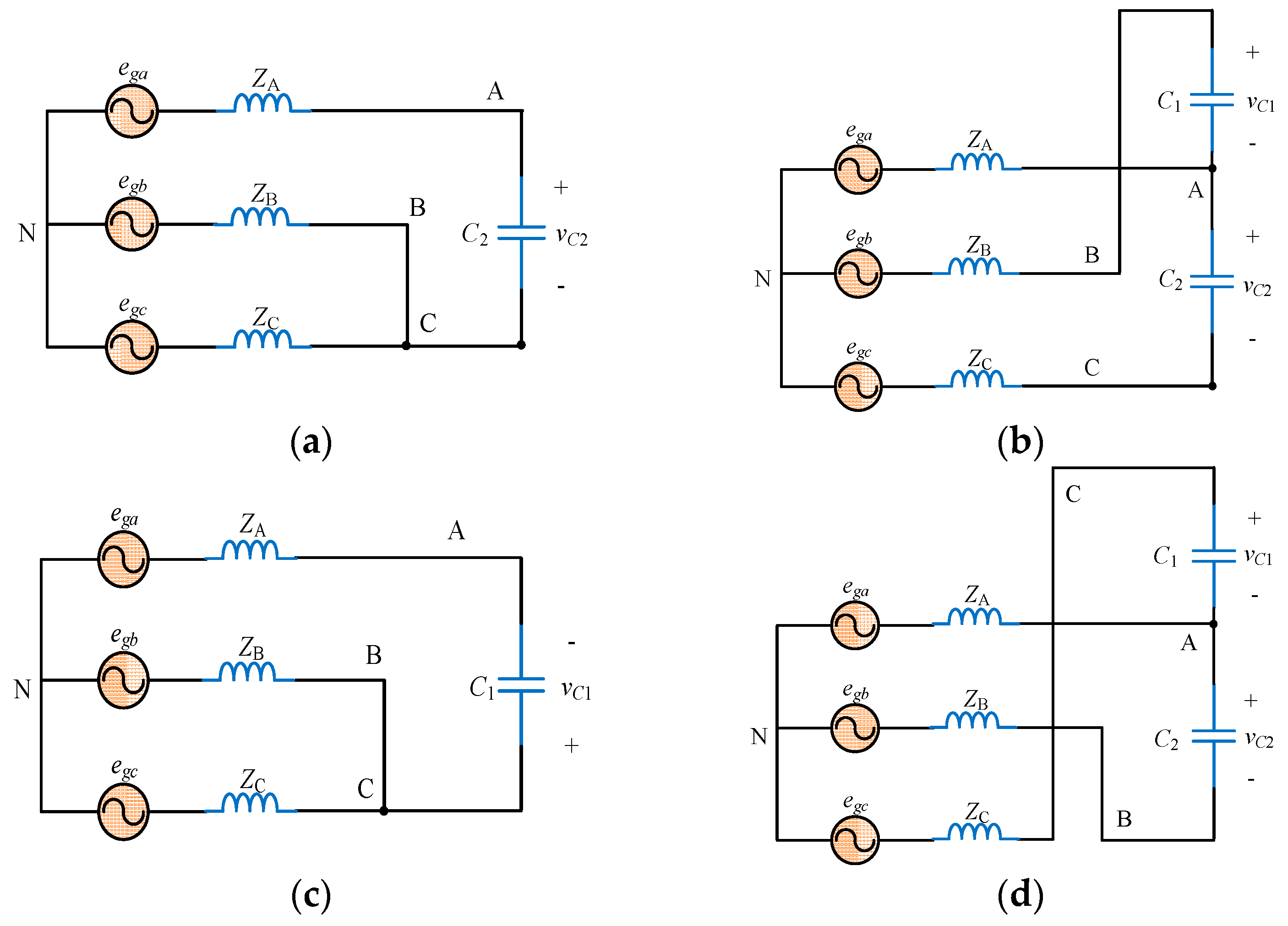
01) are used to develop a new SVM technique for the post-fault FSTP GSC. Equivalent circuits for an FSTP converter with different switching states are shown in
Figure 3, and the values of three-phase grid voltages in an FSTP converter are displayed
Table 1. The low-frequency model of an FSTP GSC is going to be analyzed according to the subsynchronous and supersynchronous operational modes of the DFIG-WT. The synchronous operational mode is not going to be discussed in detail since no AC current flow through the converter is presented in this mode.
2.1. Subsynchronous Operational Mode
Under the subsynchronous mode, the three-phase currents flow from the GSC to RSC to support the exciting magnetic fields in the rotor, and
ωr is smaller than
ωs in this case. The grid-side three-phase voltages can be derived as functions of switching variables
Sb and
Sc by using Kirchhoff voltage laws as shown below:
DC-link currents can also be expressed by
Sb and
Sc as:
According to Kirchhoff current laws, the current in phase A is the difference between the upper and lower DC-link currents, which can be expressed as:
Substitute (3) into (4), the expression for
iga is:
The expression reveals that appropriate modulation and control of the currents in phase B and phase C can ensure the quality of the current in phase A. The difference between
vC2 and
vC1 is derived by performing integral on both sides of (5):
In (6), vC1(0) and vC2(0) are the initial values for vC1(t) and vC2(t). The contribution of iga to the voltage fluctuation depends on the value of the capacitance CDC, and the voltage fluctuation is eliminated if CDC is large enough.
2.2. Supersynchronous Operational Mode
When DFIG-WT operates in this mode, the three-phase current flows are from the RSC to GSC, which contributes to a part of power output to the grid, and
ωr exceeds
ωs. The expressions of the three-phase grid-side voltages are the same as those described in (2). The expressions for the DC-link currents are:
According to Kirchhoff current laws, the current in phase A is the difference between the upper and lower DC-link currents, while the direction of it is opposite to that in the subsynchronous operational mode, and the counterparts of Equations (4)–(6) in this mode are expressed as:
From (8), it can be observed that these equations are derived by replacing iga with (−iga) for (4)–(6). The expressions for the difference between the capacitor voltages for two different operational modes of a DFIG-WT both indicate that by adding a proper DC value to the grid current in phase A, the voltage deviation is likely to be suppressed.
6. Simulation Results and Discussion
In this paper, the detailed DFIG wind farm model in Matlab/Simulink 2016a is used as the basis for simulation. Reconfiguration of GSC is done by connecting phase A to the midpoint of DC bus. Details of the parameters are displayed in
Table 3. The values of proportional and integral gains for different PI controllers are shown in
Table 4. Three different operation environments are considered for both the SSTP and FSTP GSC based DFIG-WTs, which are the situations without external disturbance, with fluctuating wind speed, and with both fluctuating wind speed and grid voltage sag. When there is no external disturbance included, the wind speed is maintained at 15 m/s. For the second case, the 1.5 MW DFIG-WT operates under the condition that the wind speed keeps changing within the range of 7 to 15 m/s every 0.01 s. To further investigate the low voltage ride through (LVRT) ability of DFIG-WT with SSTP and FSTP GSCs, a low voltage period is considered from 0.02 s to 0.07 s, and during this period the voltage value decreases to half of the original value. The sampling time for the simulation is set as 5 μs.
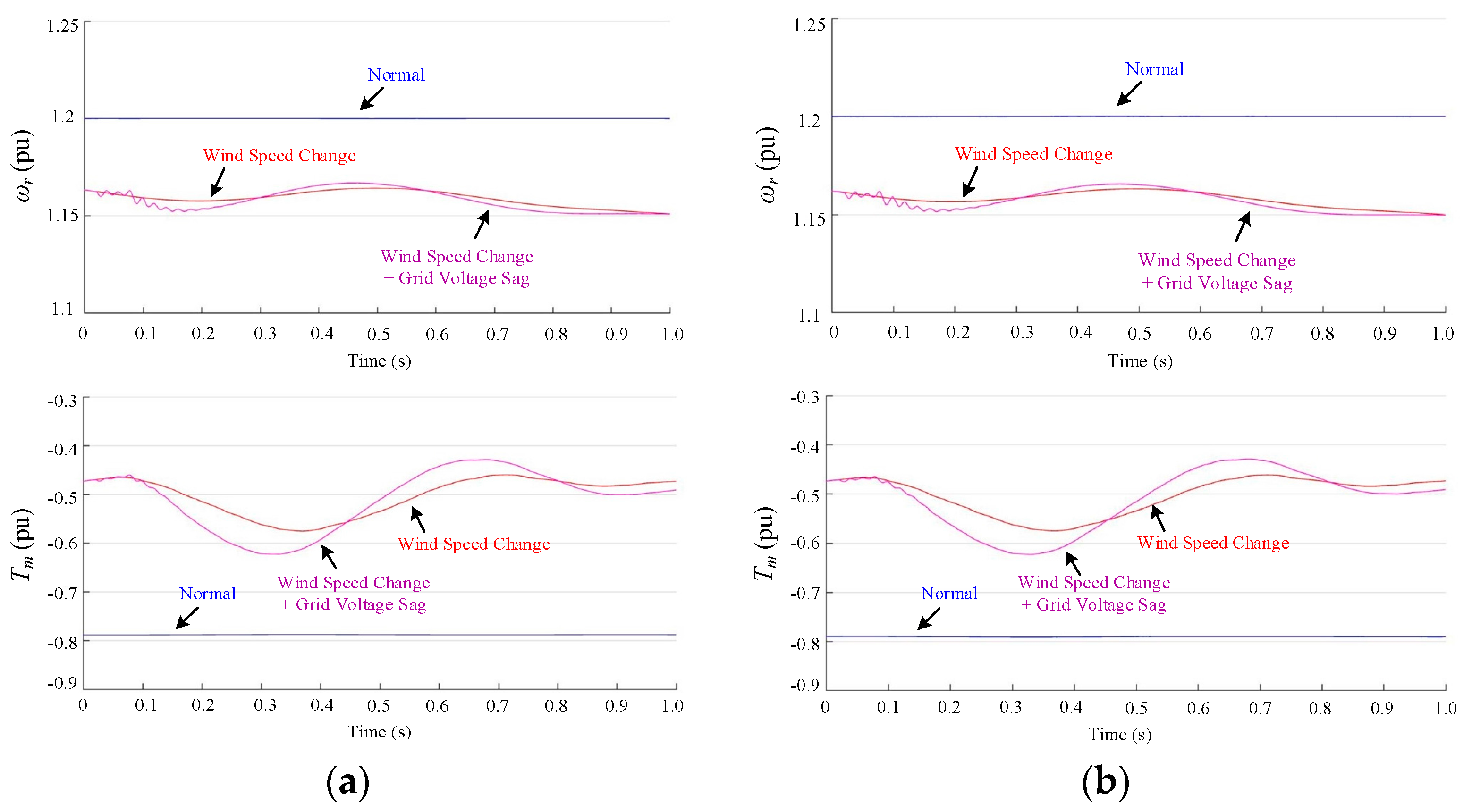
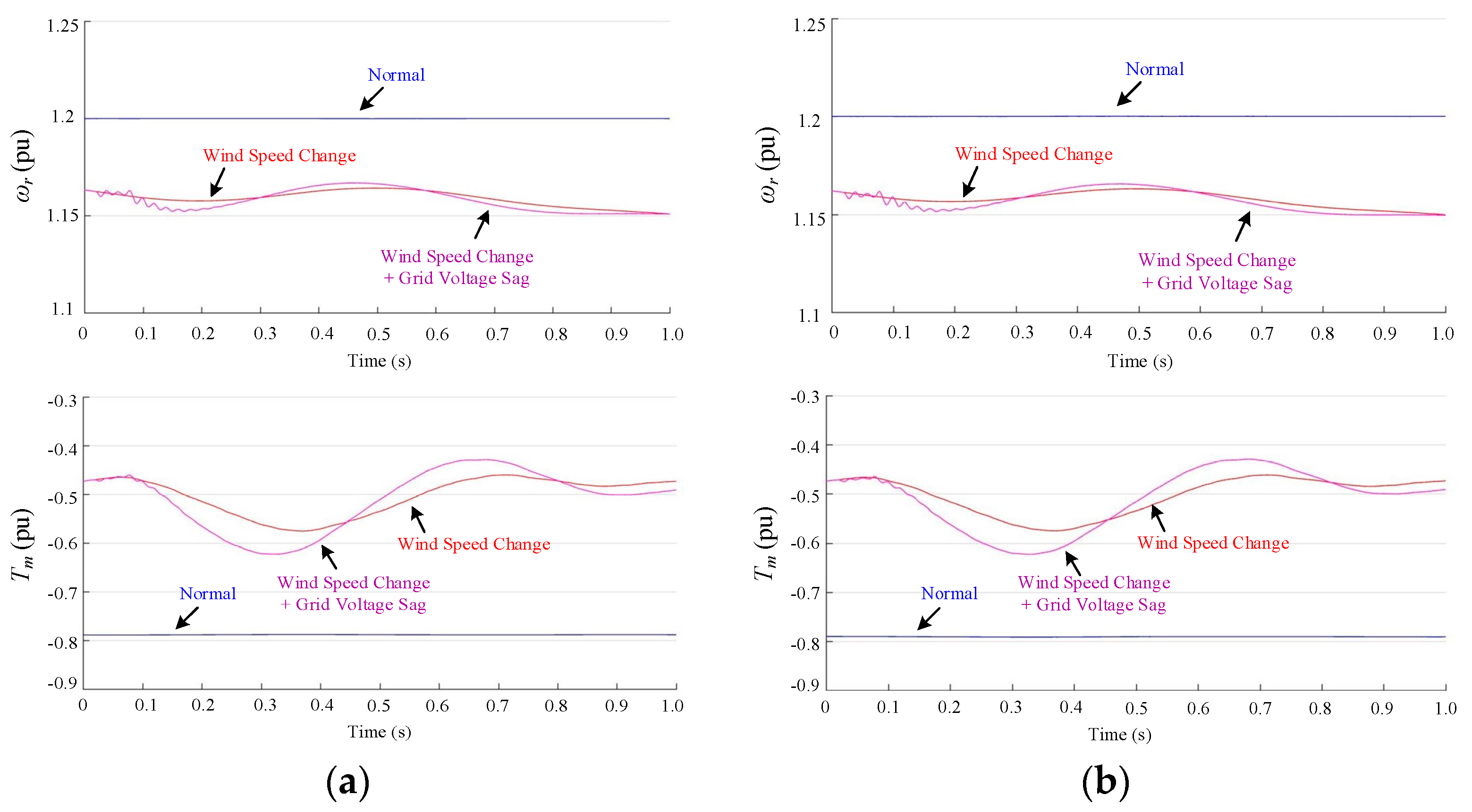
The rotor speed and mechanical torque under different operational situations for the pre-fault and post-fault GSC based DFIG-WT are displayed in
Figure 6. The rotor speed remains at 1.2 pu when there is no external disturbance, while it decreases and fluctuates around a value over 1.15 pu after external disturbances are added. The results cater to the analysis in
Section 4. For the mechanical torque, a stable value of about −0.8 pu is obtained when the wind speed is fixed at 15 m/s. Since the average wind power input decreases when the wind speed changes, the absolute value of the mechanical torque declines obviously with fluctuations as described in (27). With grid voltage sag, the grid currents have to increase because steady power output is to be kept, which increases the value of
Te. Then the absolute value of
Tm increases as displayed in
Figure 6 to guarantee a steady rotor speed. After 0.3 s, its value starts to return to the original one. From
Figure 6 it can be observed that the mechanical performance of the system is not affected by reconfiguration of GSC, which validates the feasibility of this fault-tolerant topology in DFIG-WT. To ensure the stability of DC-bus voltage and effective control of output power factor of the generator, the qualities of the three-phase grid current waveforms must be high enough.
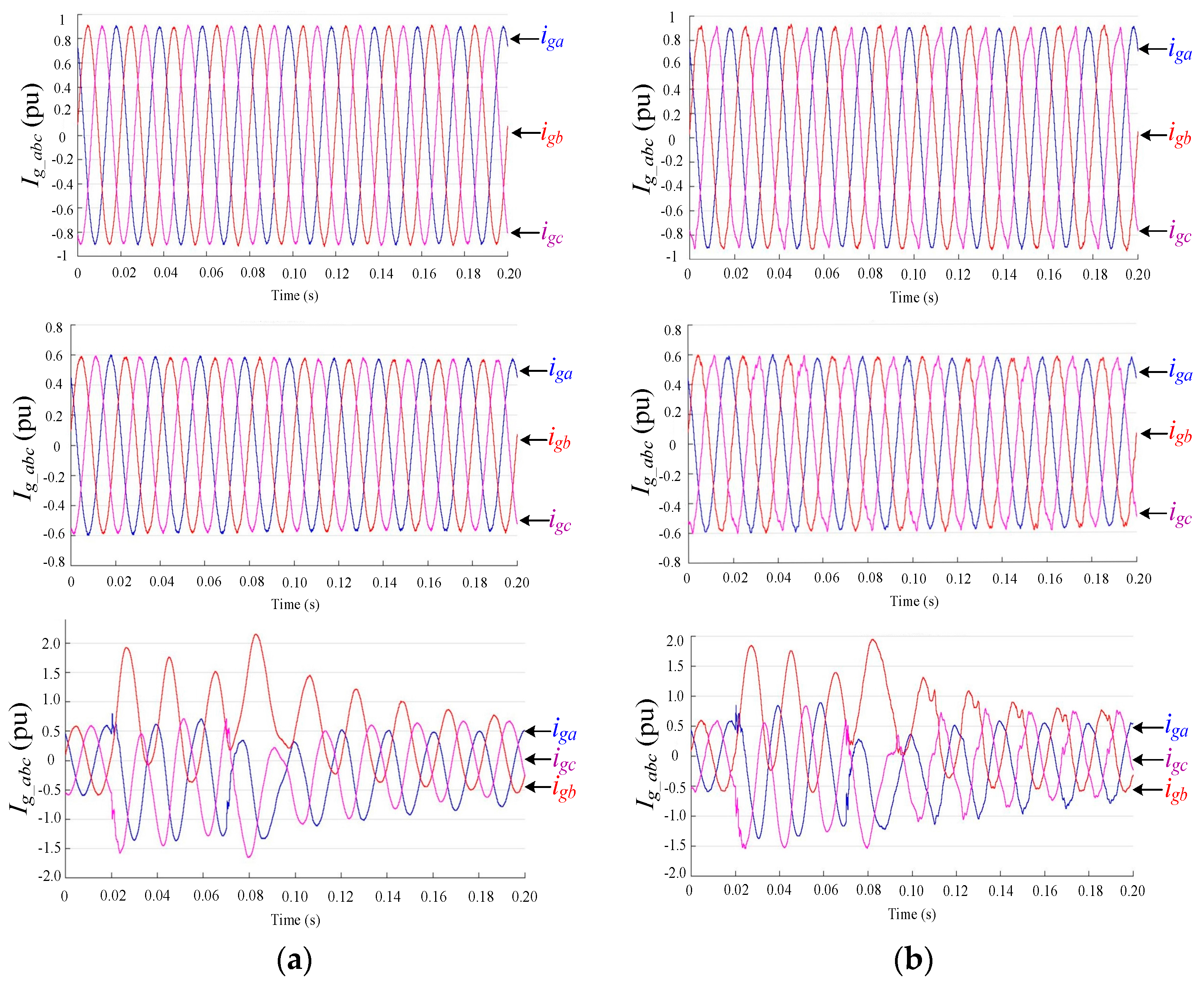
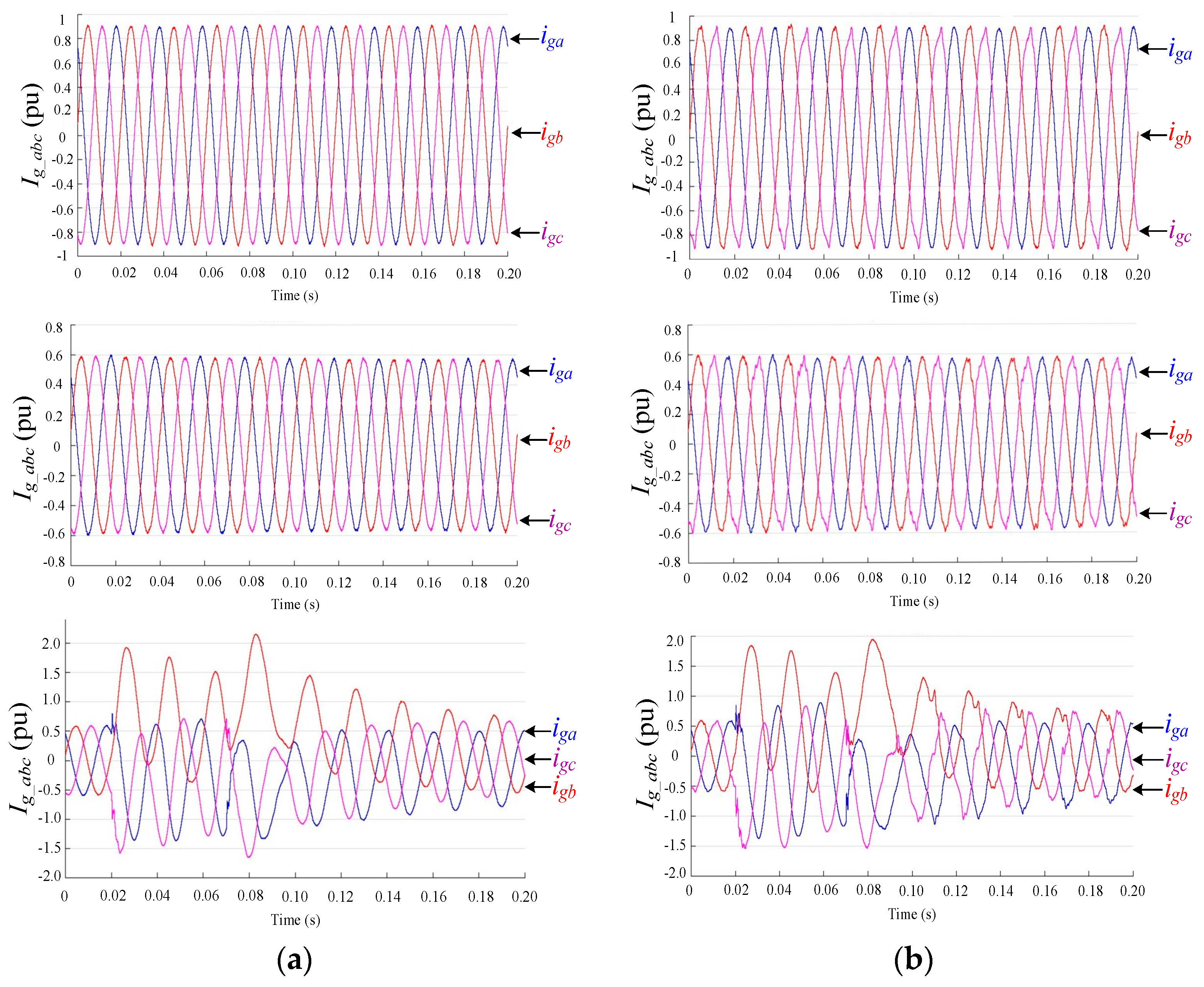
A comparison between the grid current waveforms for SSTP and FSTP GSC based DFIG-WTs in the three cases is carried out, which is displayed in
Figure 7. When the wind speed is fixed at 15 m/s, the amplitudes of the three-phase grid currents are around 0.9 pu for both the SSTP and FSTP cases, and more distortions can be seen in the latter one. When wind speed fluctuation is considered, the qualities of current waveforms are deteriorated for both cases and the amplitudes fall to around 0.6 pu. After the grid voltage sag is included, obvious deviations of three-phase currents are presented, and the influence lasts for approximately 0.12 s after the sag is removed.
In order to analyze the quality of grid current waveforms in detail, Fast Fourier Transformation (FFT) analysis is conducted. The data derived from FFT analysis is shown in
Table 5 and
Table 6. From
Table 5, it can be observed that the total harmonic distortion (THD) values for the grid currents in three phases before GSC reconfiguration is made are relatively low, which are all smaller than 1.5%. The point to be noticed is that all the statistics are the same for the second and third cases, indicating that the grid voltage sag does not essentially affect the grid current quality. As can be seen from
Table 6, after FSTP GSC is used in the post-fault case, the magnitudes of fundamental components in three-phase grid currents are slightly smaller than their counterparts in SSTP GSC case, and the values of THD increase. However, the system is considered operating normally as the values are all lower than 5% (the maximum allowed THD for grid currents) [
37]. In addition, when this post-fault FSTP GSC topology is used, the quality of the grid currents is not affected by the grid voltage sage. Furthermore, the current distortion in phase A is the least among three phases for each situation, which demonstrates the advantage of applying split DC-link capacitors in this topology. From these results, the validity of the proposed SVPWM technique is proved since the reliability of the system is good enough when facing both wind fluctuation and grid voltage sag conditions.
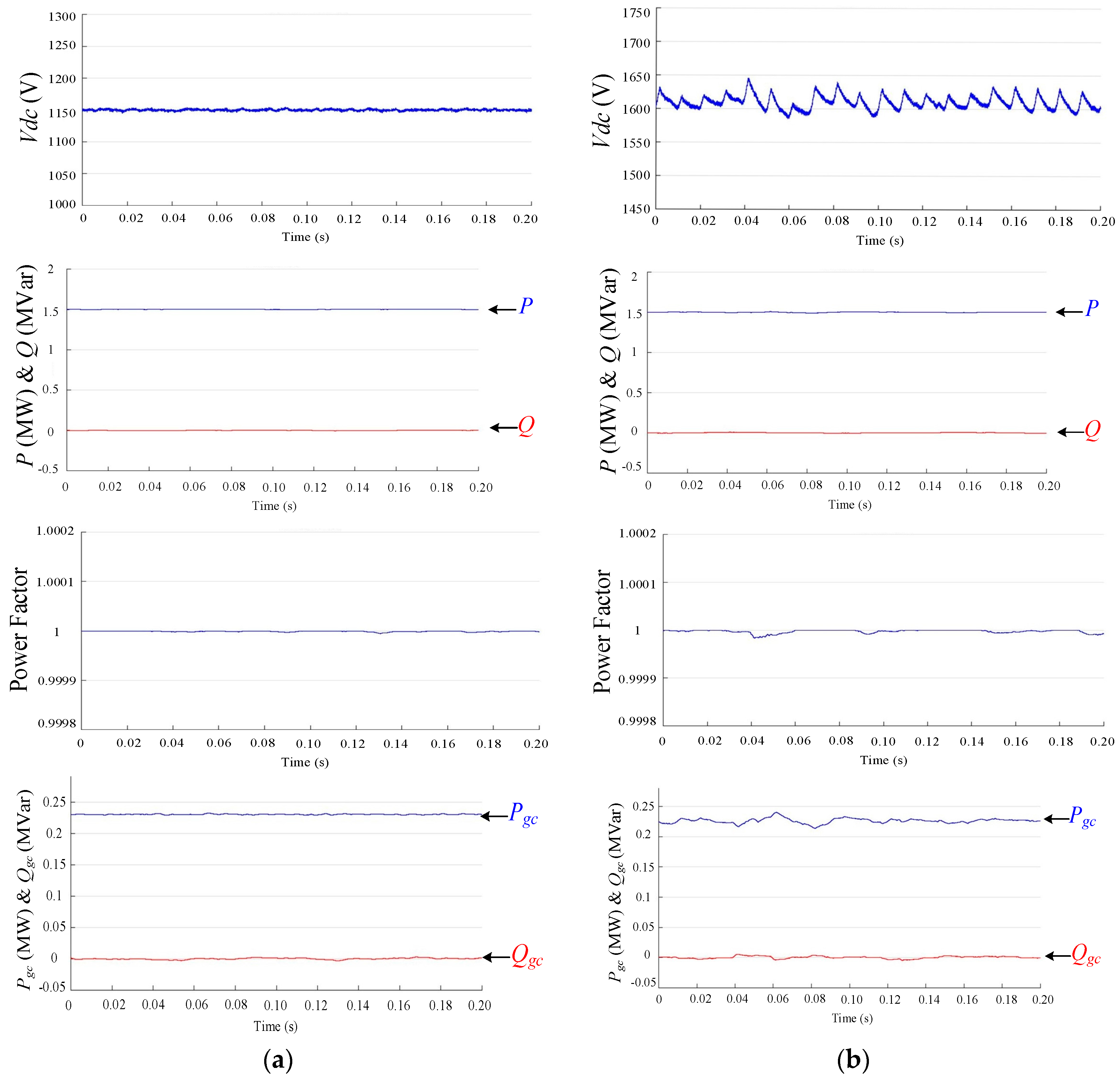
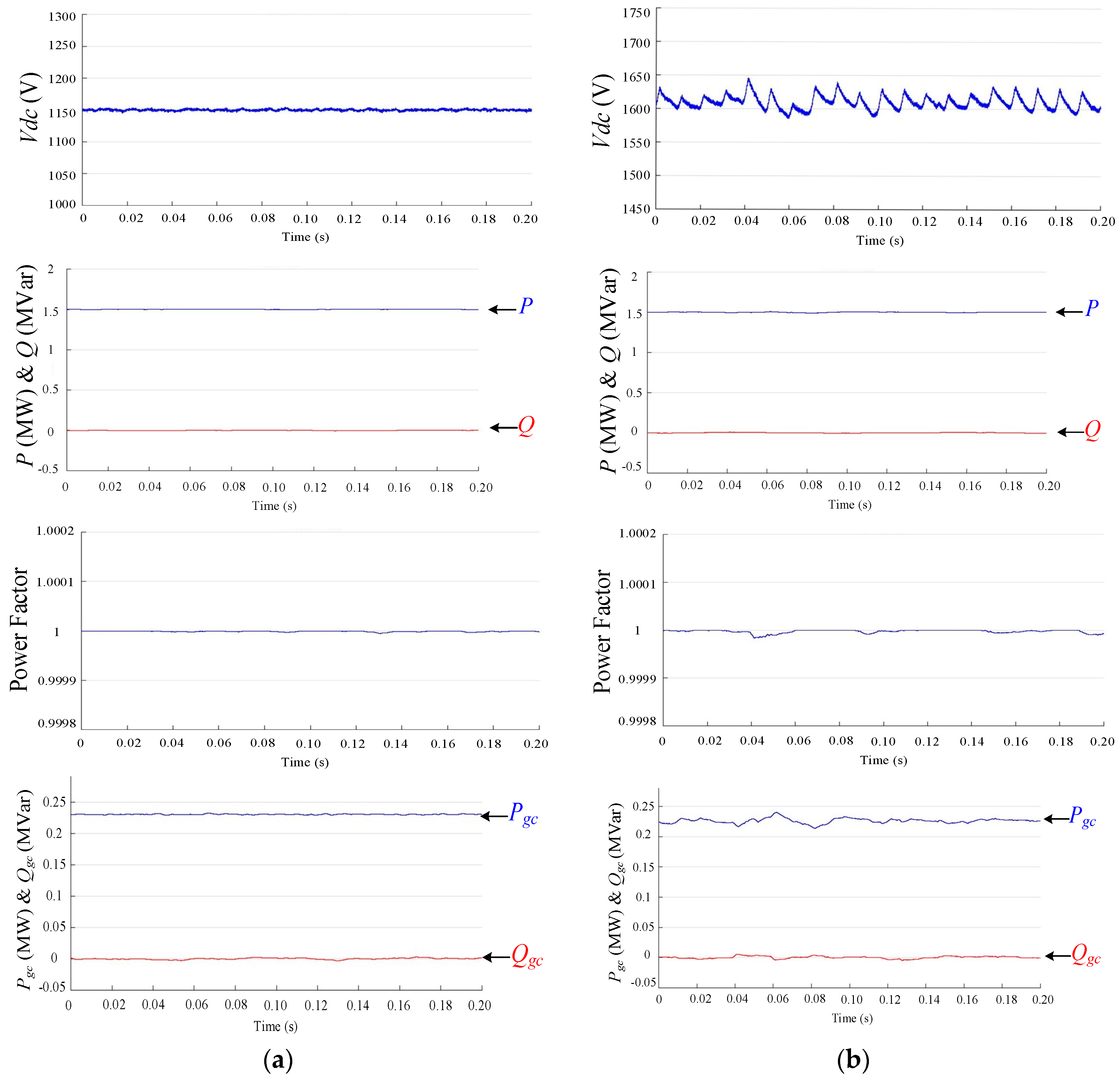
In
Figure 8,
Figure 9 and
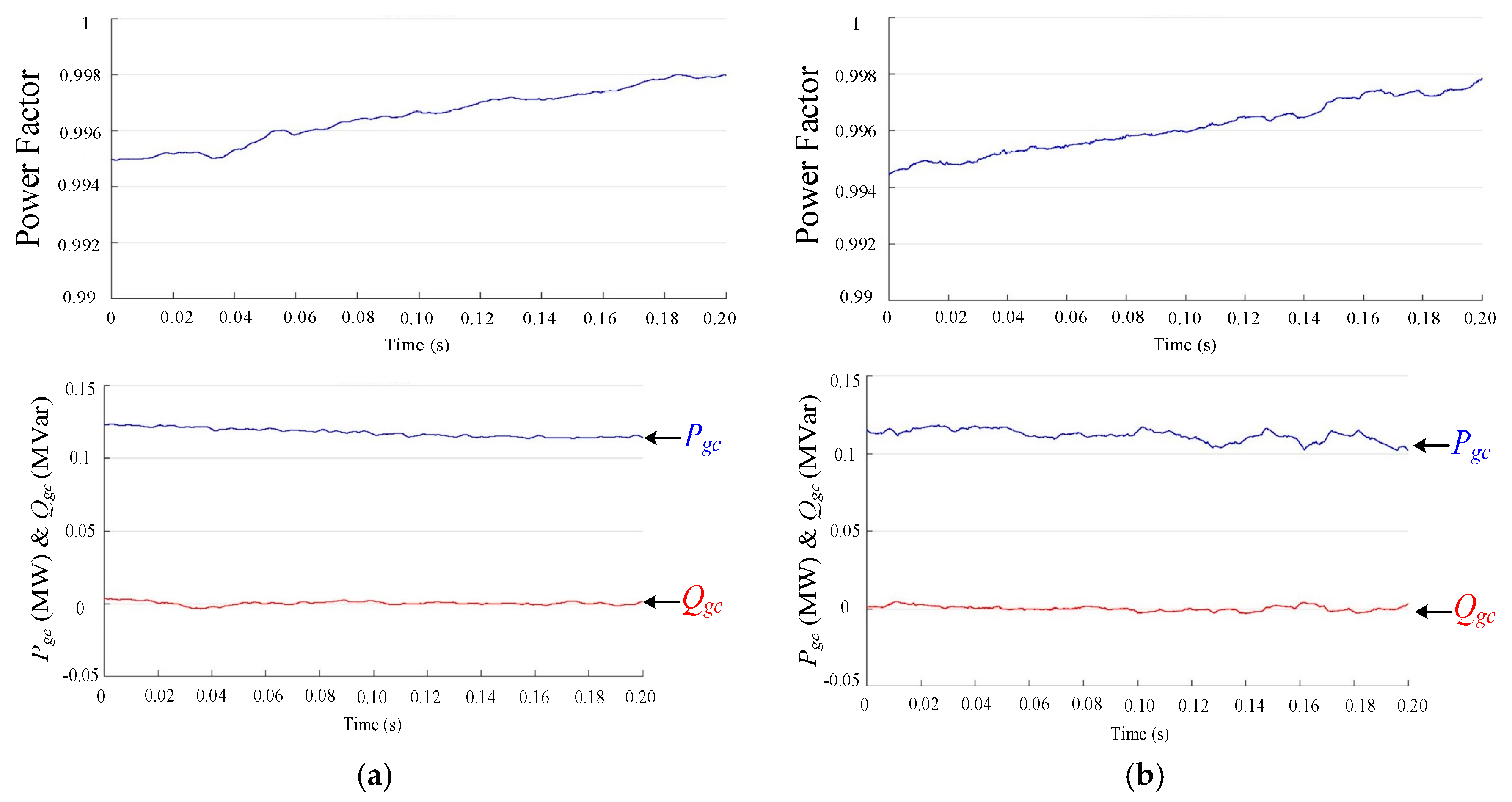
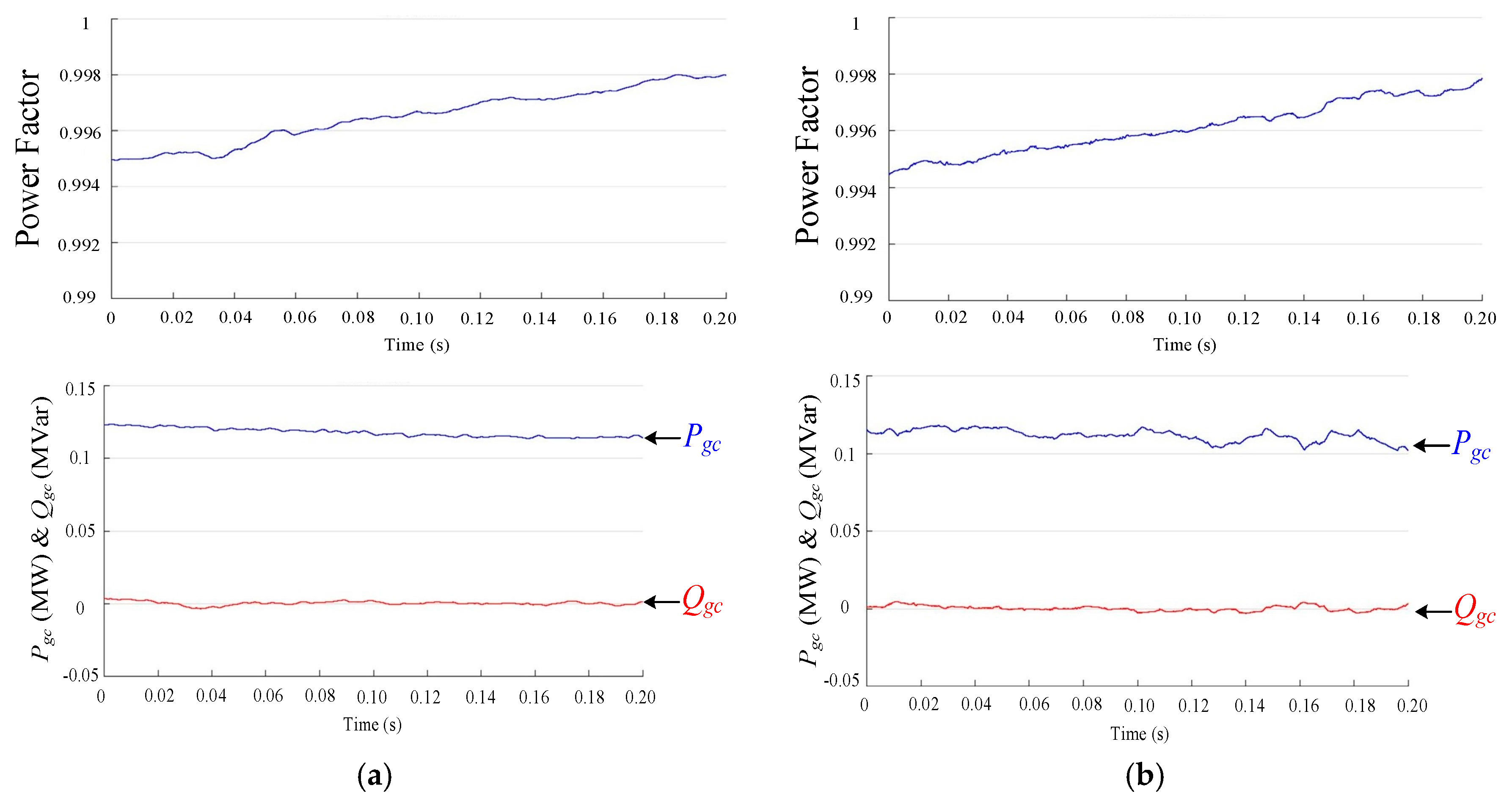
Figure 10, the DC-bus voltage, active/reactive output power, output power factor, and active/reactive power from GSC are illustrated under the three cases mentioned above to further investigate the performance of FSTP GSC based DFIG-WT, with comparison to the SSTP one. Under the circumstance without external disturbance, as depicted in
Figure 8, although obvious fluctuations are introduced for the DC-bus voltage and the active/reactive power from the GSC for the FSTP case, the total output power and its power factor are almost not influenced. In
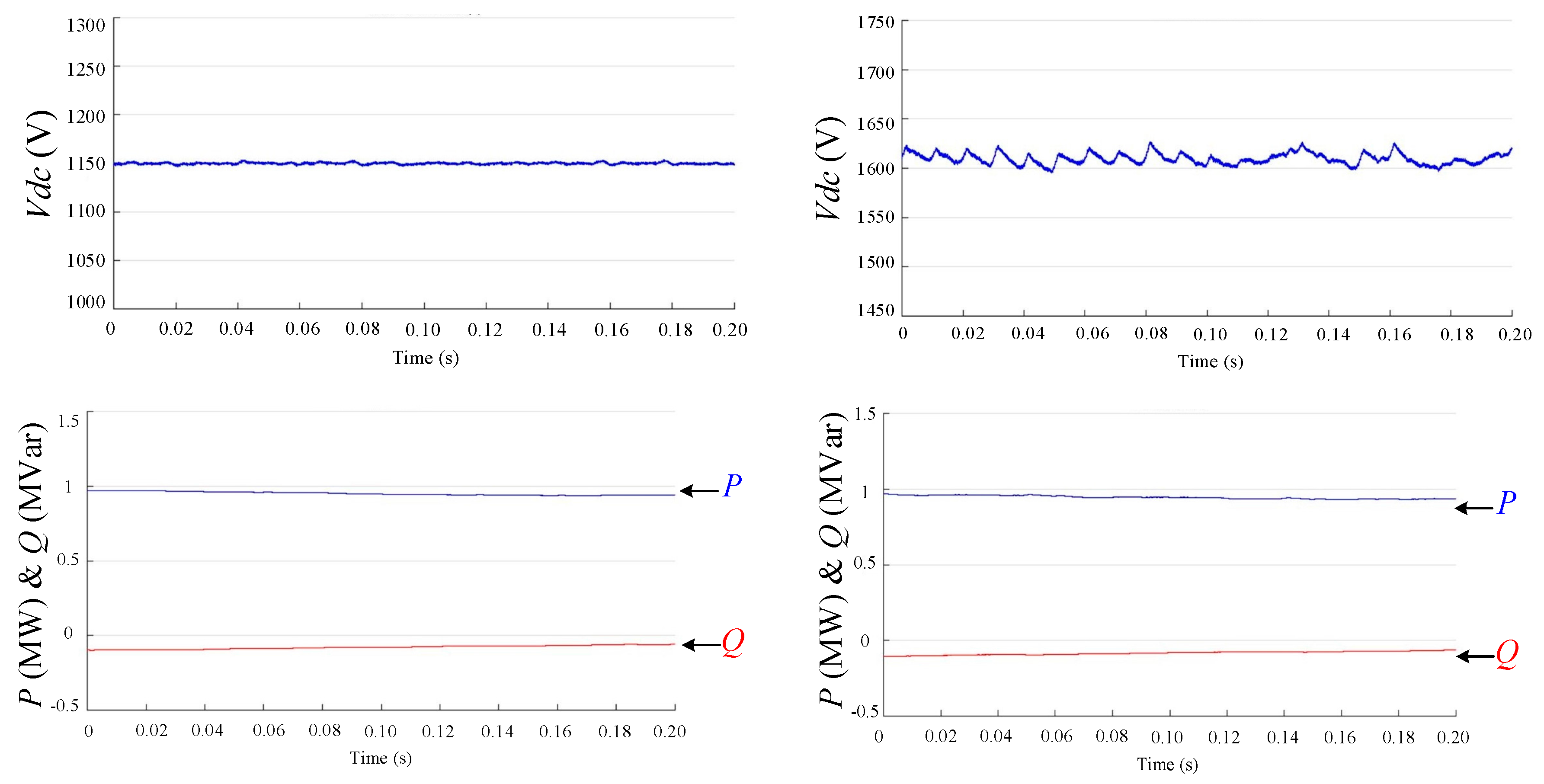
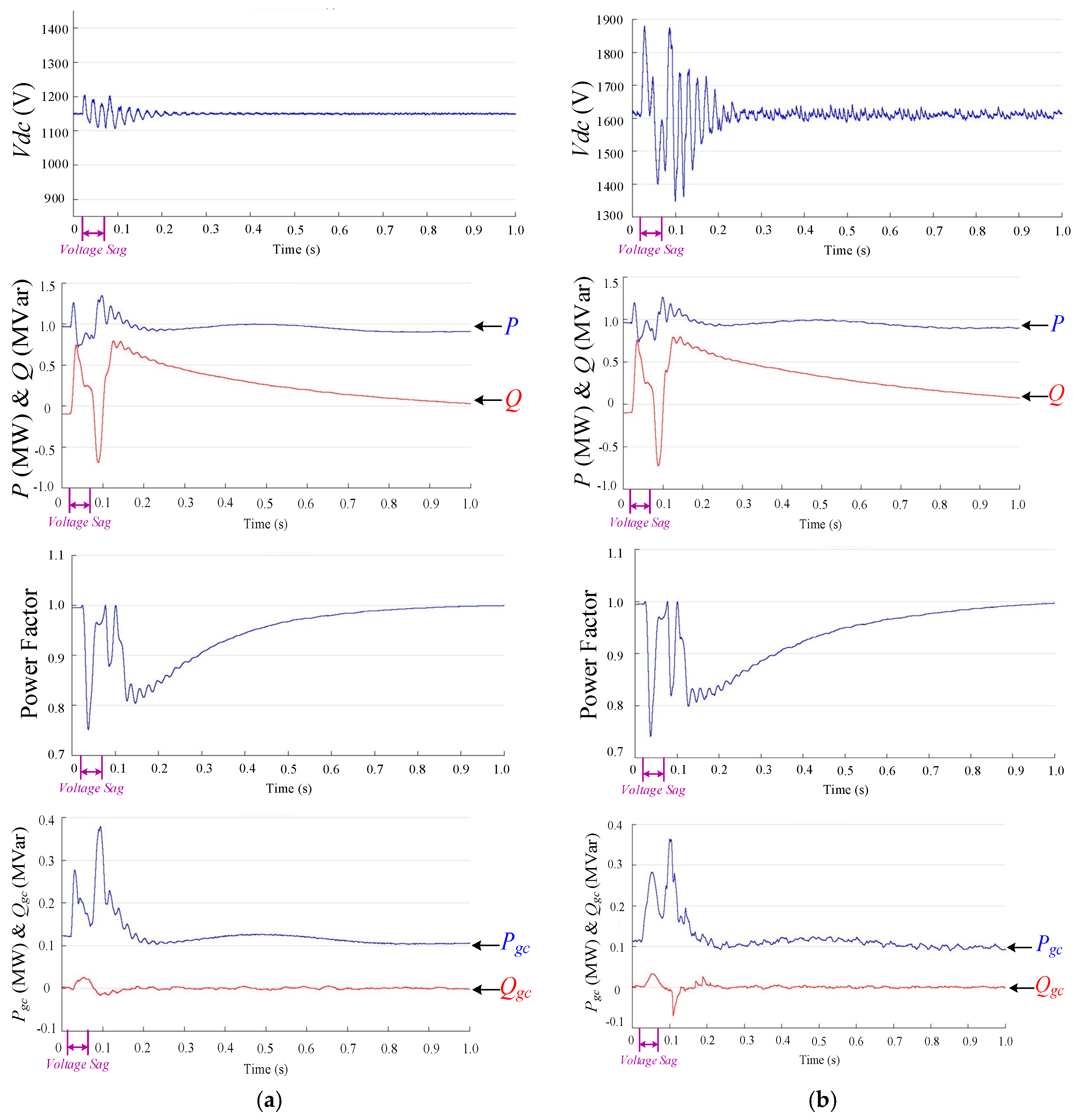
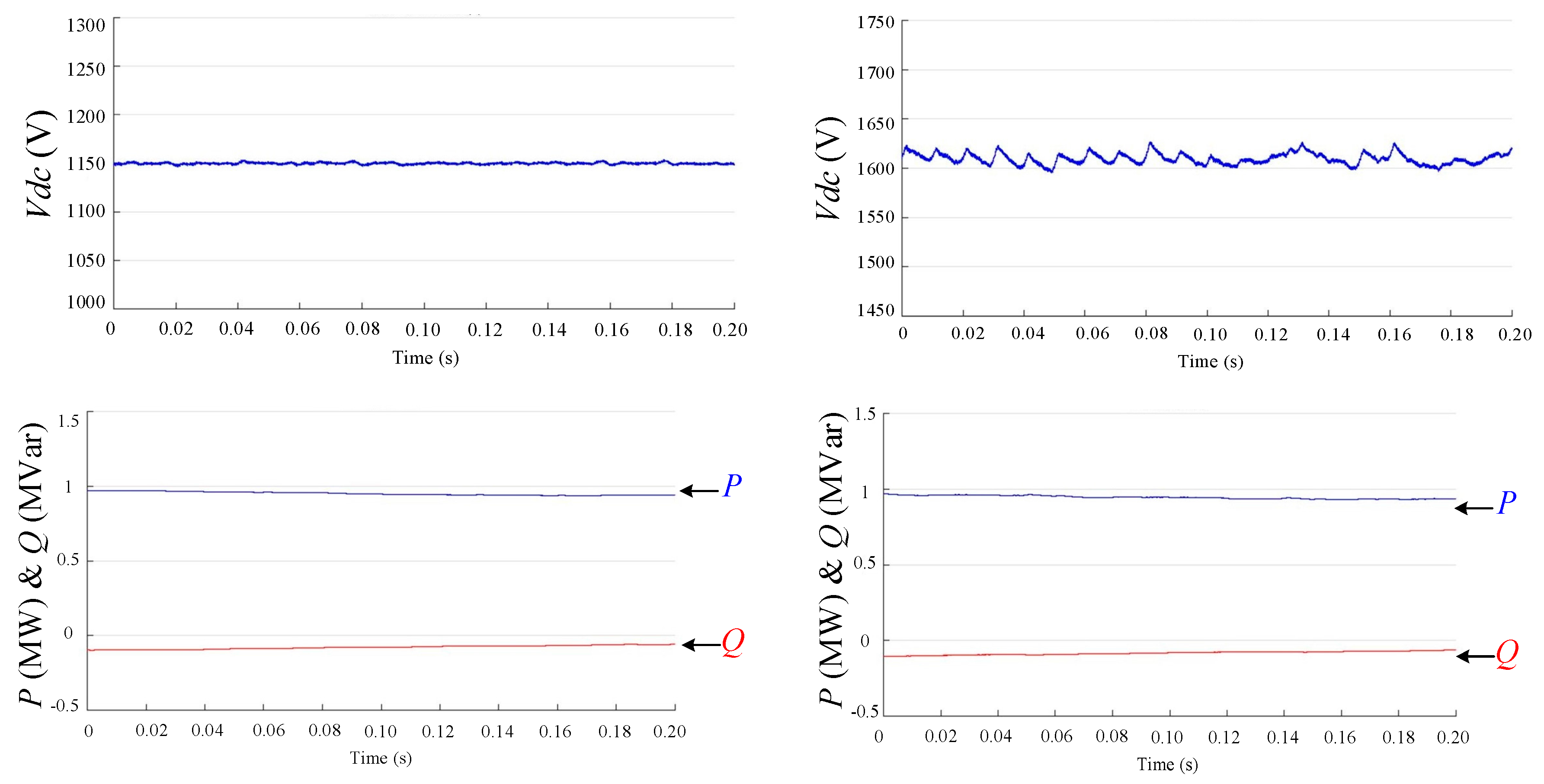
Figure 9, the performance analysis is conducted when the wind speed is fluctuating between 7 m/s and 15 m/s. Compared with the situation in the normal case, the fluctuation of DC-bus voltage is even smaller. Since the efficiency of absorbing wind energy decreases, less power output is to be produced, which reduces the voltage stress on the DC bus. From this point of view, the post-fault FSTP GSC topology is more suitable for DFIG-WTs operating with varying wind speed, which is a situation similar to a real one. The total and grid-side active powers are reduced, and the output power factor decreases slightly for both SSTP and FSTP GSC based DFIG-WTs in this case. The situation with grid voltage sag along with changing wind speed is illustrated in
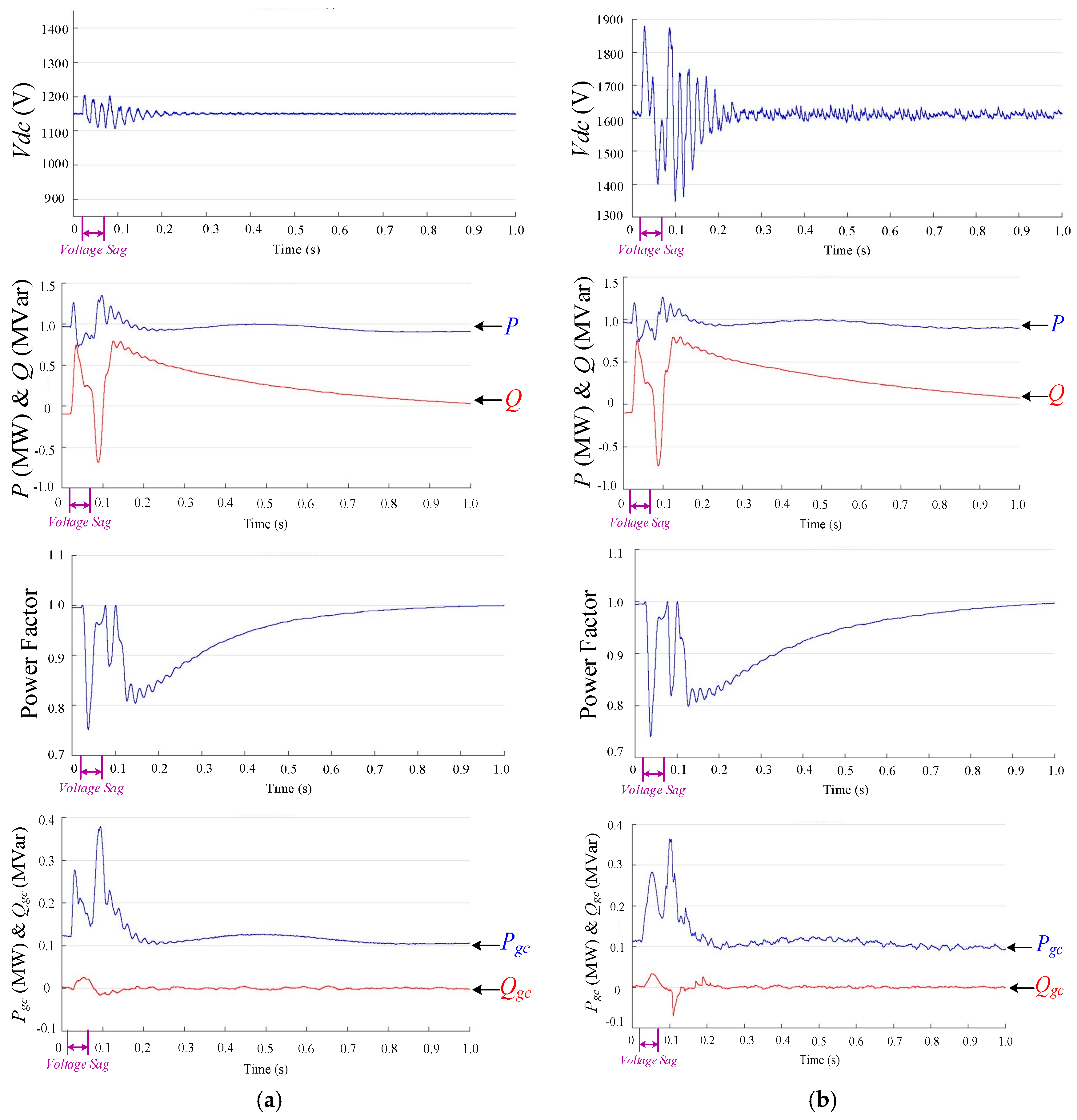
Figure 10, and the performances of the two different GSC topology based DFIG-WTs are similar in terms of the power factor. However, distinct fluctuation of DC-bus voltage is displayed for almost 0.2 s for the FSTP case. If the grid voltage fault lasts for a long period of time, it may cause damage to the capacitors. While the proposed FSTP GSC is robust to short-term grid voltage sags, which are more commonly encountered than the long-term ones.
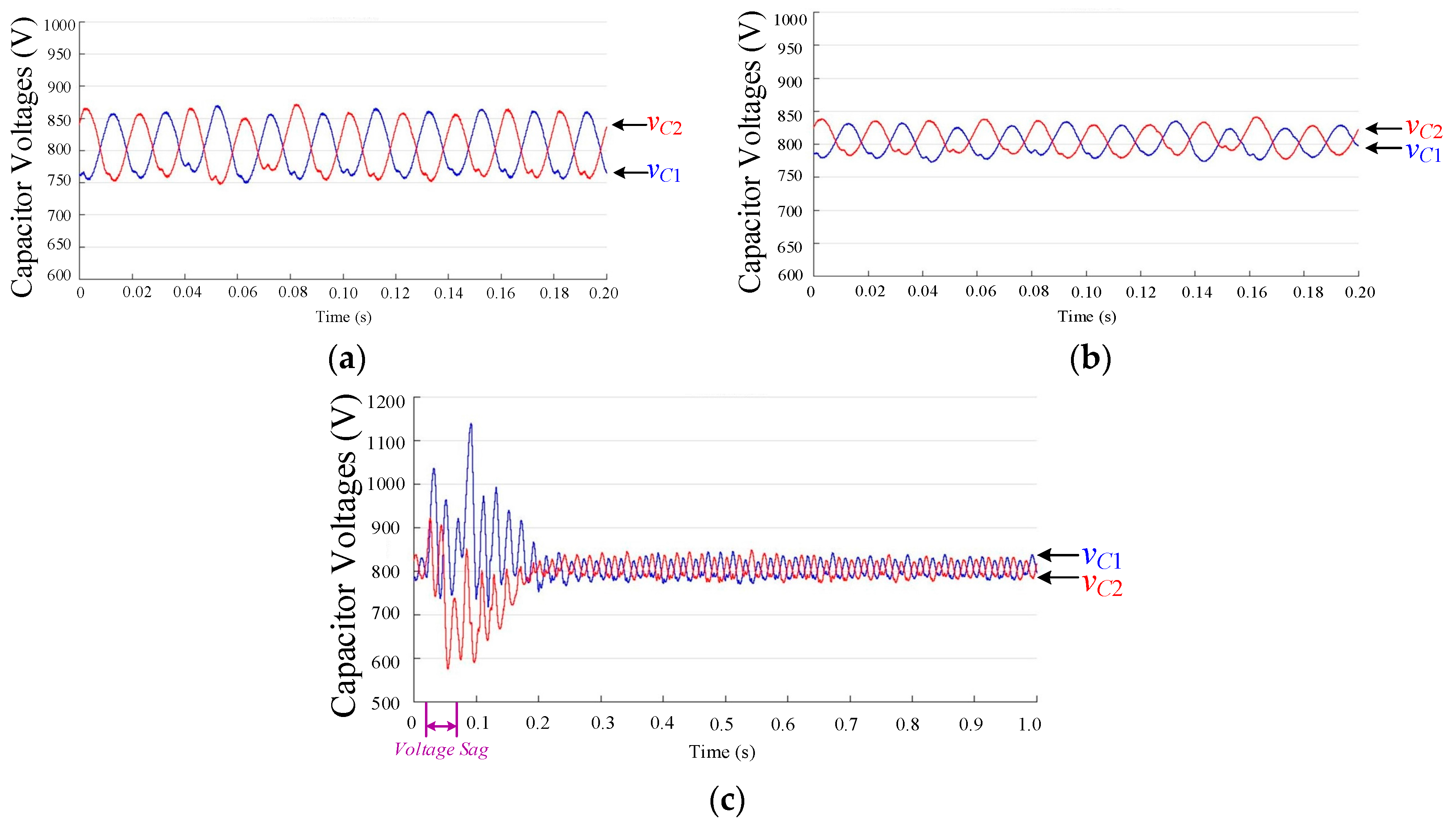
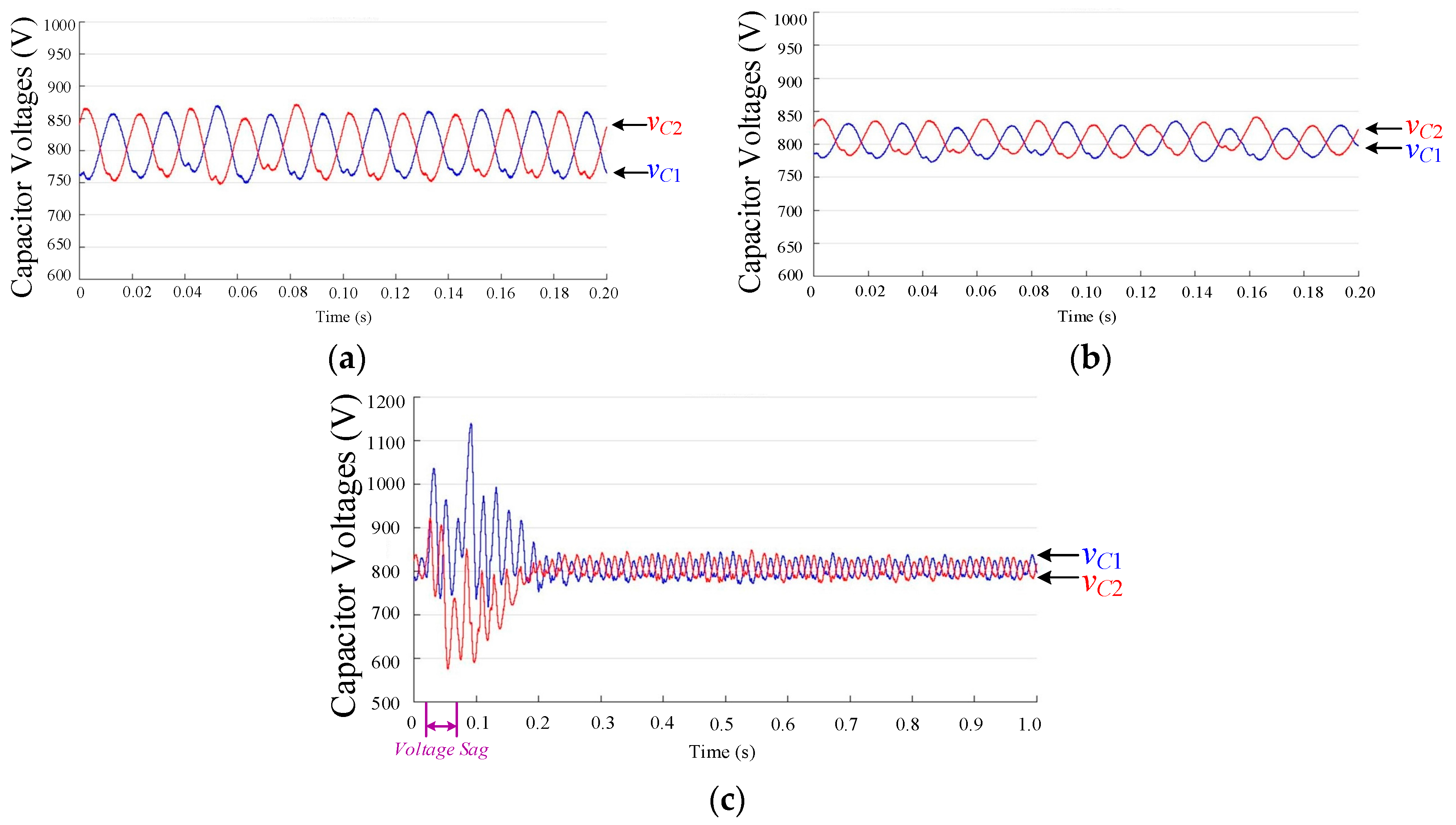
The application of FSTP GSC topology induces capacitor voltage imbalance, and suppression of the voltage difference is required to avoid extremely large voltages on DC-link capacitors. By using the DC voltage difference suppression controller, the difference between the upper and lower capacitor voltages is maintained within an acceptable range. From
Figure 11, better performance of the controller is derived when the wind speed fluctuates than that with a constant wind speed at 15 m/s, which means constantly high wind speed deteriorates its performance. When short-term grid voltage sag is considered, distinct voltage deviation is observed. After 0.2 s, the performance returns back to the normal state and the system continues to work properly.
7. Experimental Results
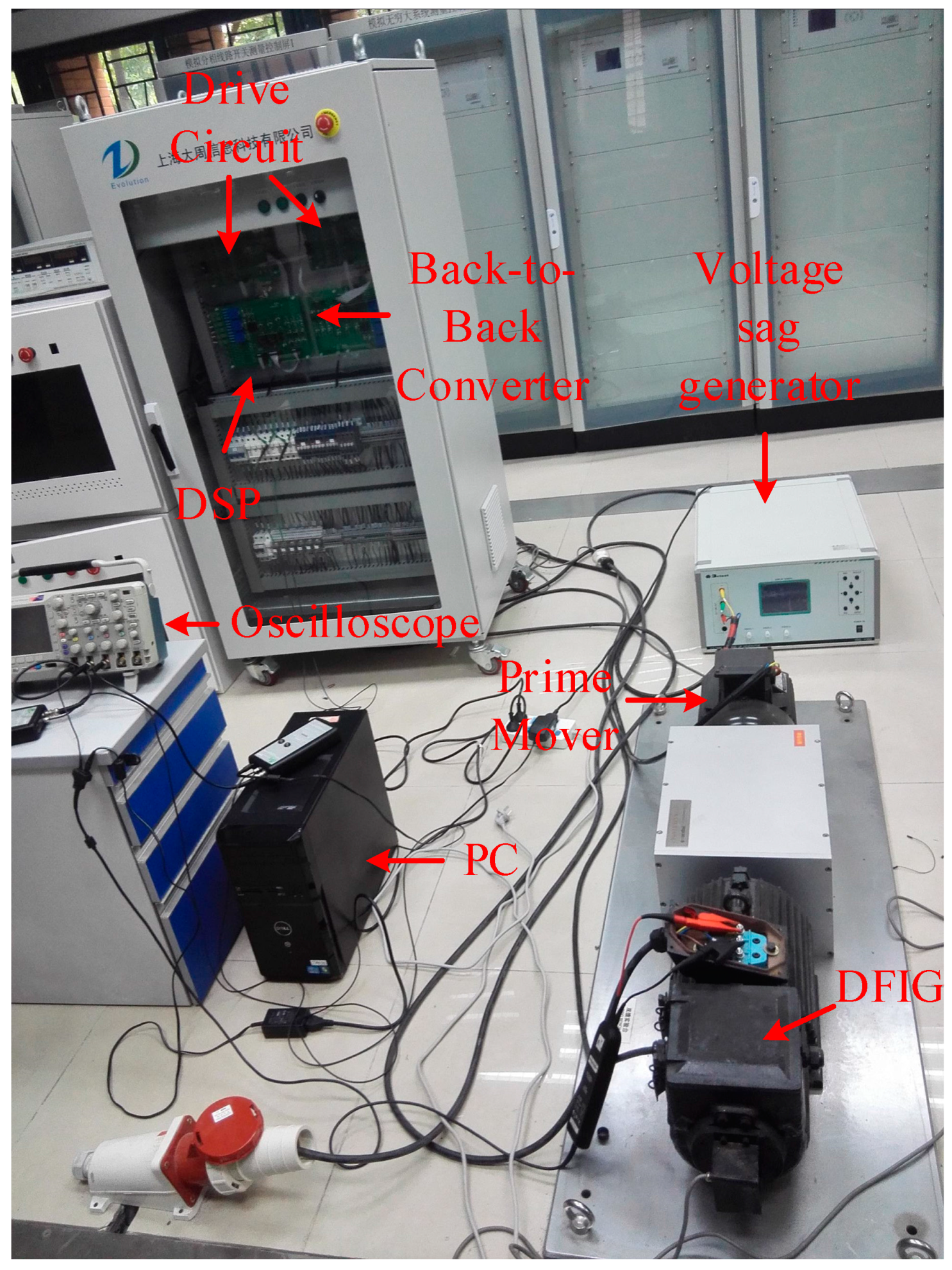
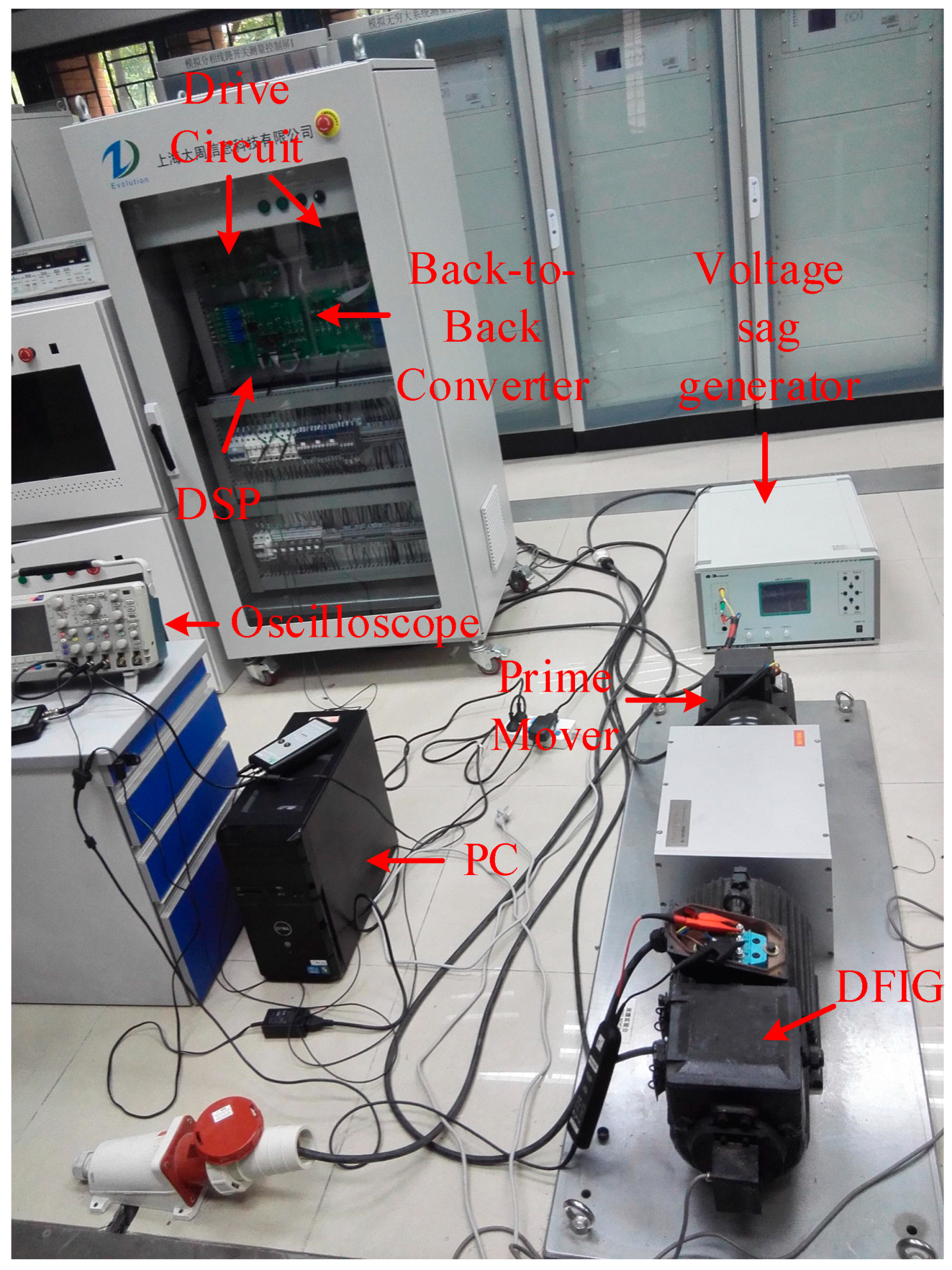
Experimental verification of the fault-tolerant capability of a down-scaled 2 kW YSF112M-4 DFIG is performed in this section. The experimental platform structure is illustrated in detail in
Figure 12, and a photograph of the experimental setup is displayed in
Figure 13. All the equipment on the experimental platform is manufactured and provided by Shanghai Gcevolution Information Tech. Co. Ltd. in Shanghai, China.
The rated three-phase line voltage is 380 V with 50 Hz as its nominal frequency, and the rated rotor speed is 1500 rpm. The number of poles is 4. A CMTP180M4-50 PMSG rated at 2.3 kW is employed as the prime mover to drive the DFIG. The control scheme of the grid-connected DFIG is implemented on a DSP TMS320F28335 controller. The product model of the three-phase back-to-back converter is DZC02KDF with precharge and discharge circuits. In the experiments, the rotor speed is set to 1500 r/min (1 pu) and the DFIG works in the synchronous operational mode. The filter frequency is 200 MHz. In the experiments the stator line voltage, stator phase current and rotor phase current are measured to validate the fault-tolerant ability of the system. All the signals are derived with the unit of volts. The actual value of stator line voltage can be derived by multiplying the measured value by 500. For the current measurement, 2 mV in the measure value corresponds to 1 A in the actual value, so the actual stator and rotor phase currents are obtained by multiplying the measurement by a coefficient of ½ (A/mV). Enlargement of each waveform derived in the experiments is put at the right-hand side of the original waveform to illustrate the change in the corresponding value at the moments of fault and recovery.
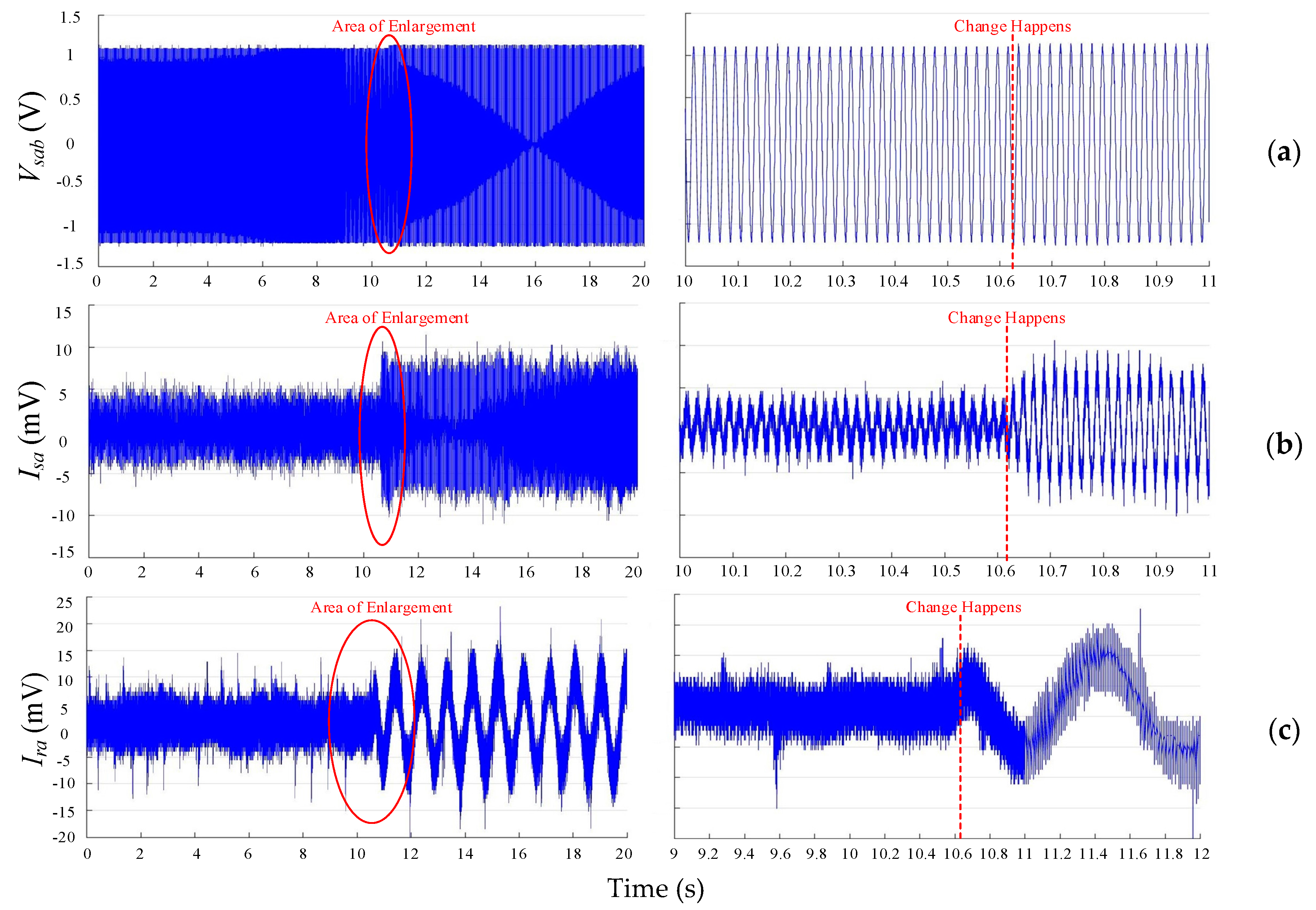
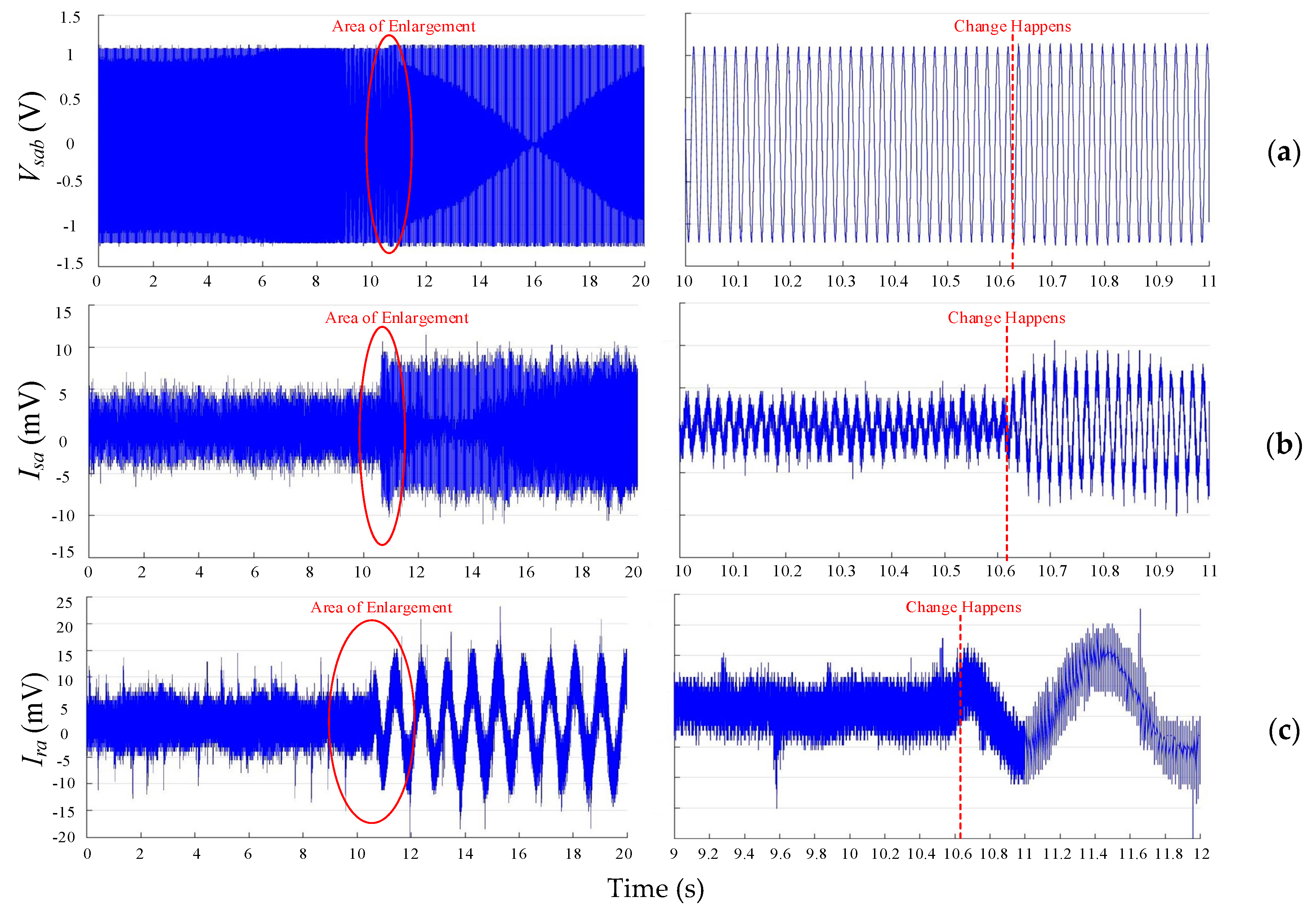
In the first experiment, the stator active power
Ps steps from 500 W to 1 kW at time
t = 10.625 s, and the sampling interval is 160 μs. From
Figure 14 the stator line voltage between phases A and B increases a little bit and keeps good waveform quality. The amplitudes of stator and rotor phase A currents both rise to approximately twice of the original value. Although a few spikes are observed, the overall performance is excellent as the stability of waveforms is guaranteed.
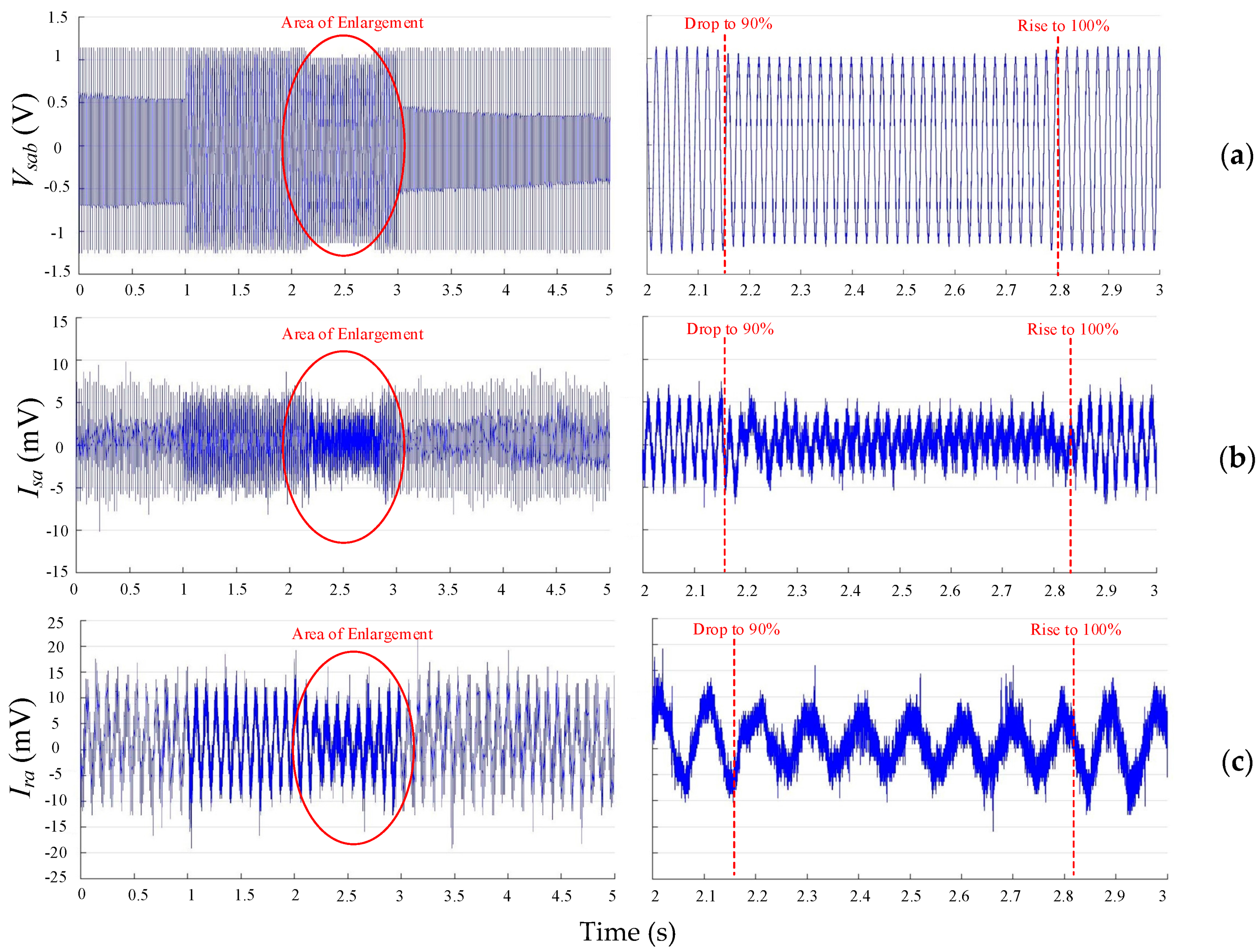
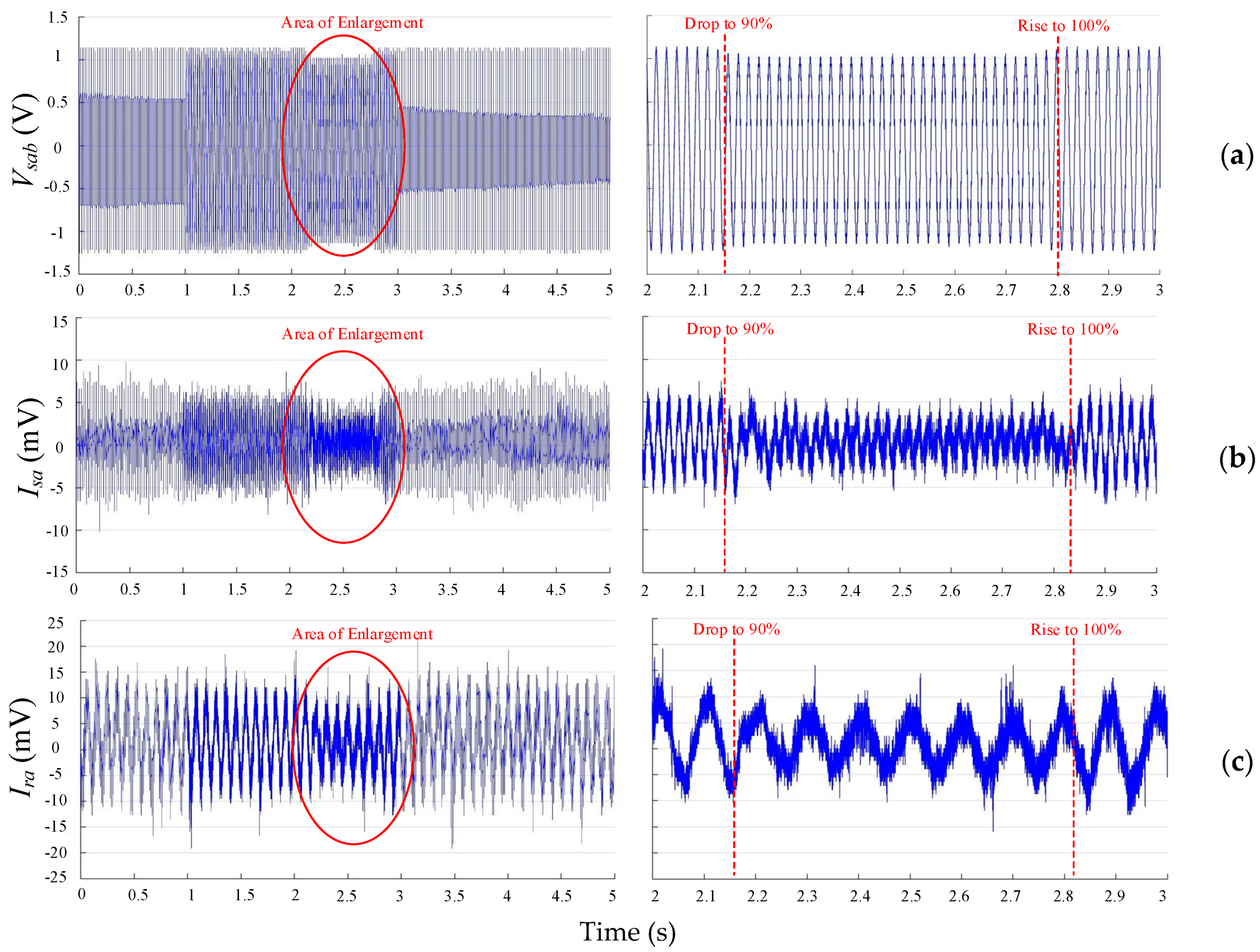
The second experiment focuses on the effect of grid voltage sag on the performance of DFIG, with the sampling interval of 80 μs. At first, the grid voltage drops to 90% of the original value and lasts for 0.625 s, and the experimental results are illustrated in
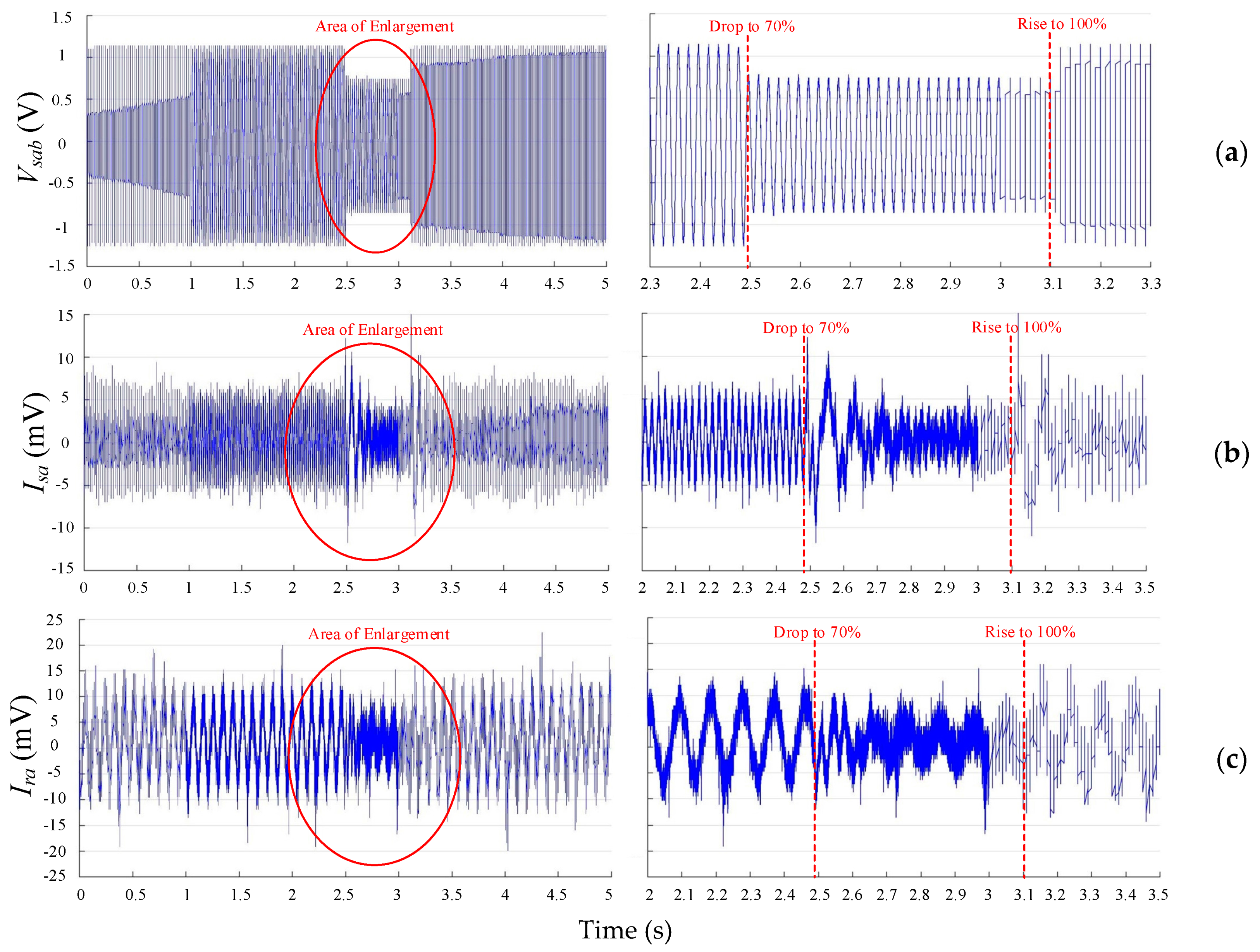
Figure 15. From the results, it can be seen that the decline of stator and rotor currents in phase A is presented during the period of voltage sag, while they return back to the normal state instantly when the voltage sag ends. Then a further grid voltage drop to 70% of the original value is performed, and the results are depicted in
Figure 16. The performance in this case is similar to the previous one, although obvious spikes in the stator phase current are presented at the beginning and ending of the voltage sag period.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}