
A Current Frequency Component-Based Fault-Location Method for Voltage-Source Converter-Based High-Voltage Direct Current (VSC-HVDC) Cables Using the S Transform


Abstract
:1. Introduction
2. Fault-Location Principle
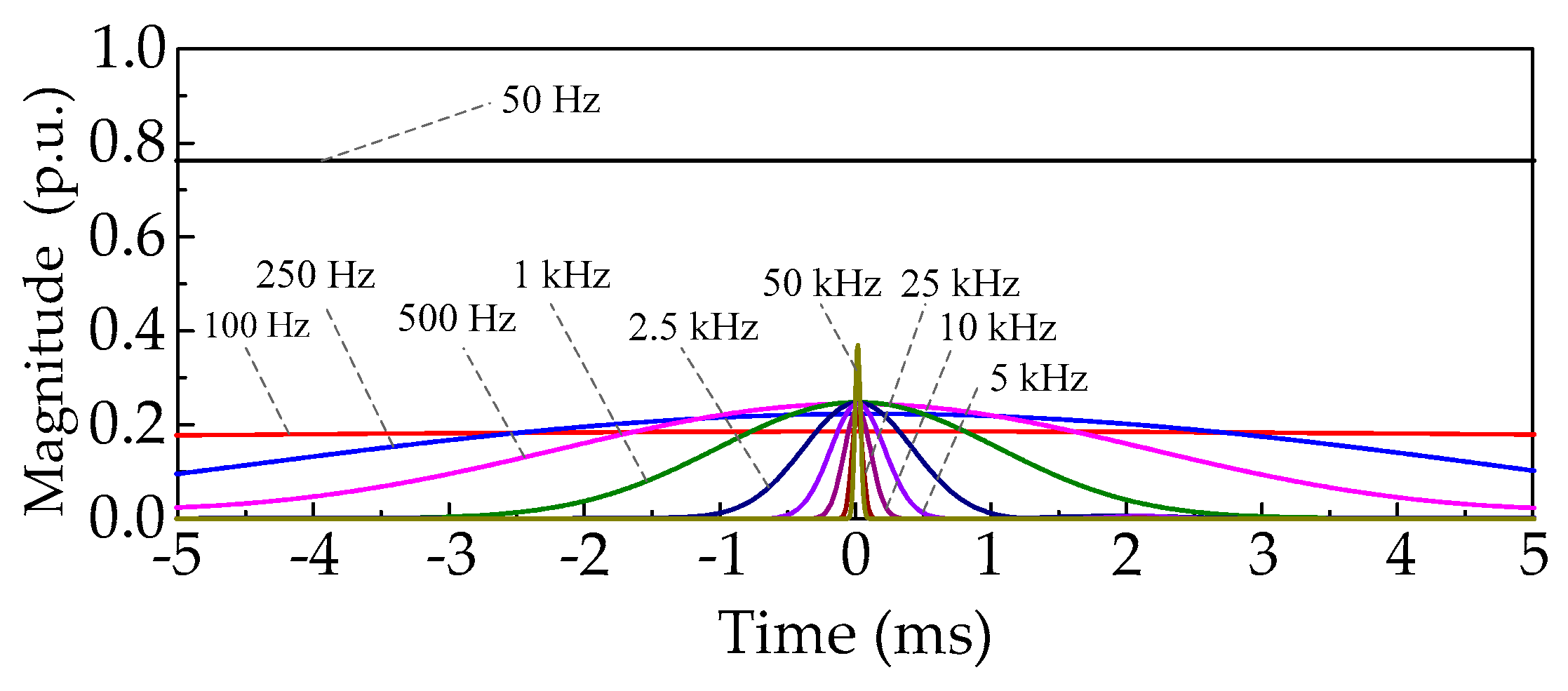
2.1. Brief Introduction of the S Transform
2.2. Estimation of the Fault Distance
3. Analysis of the Current Frequency Components
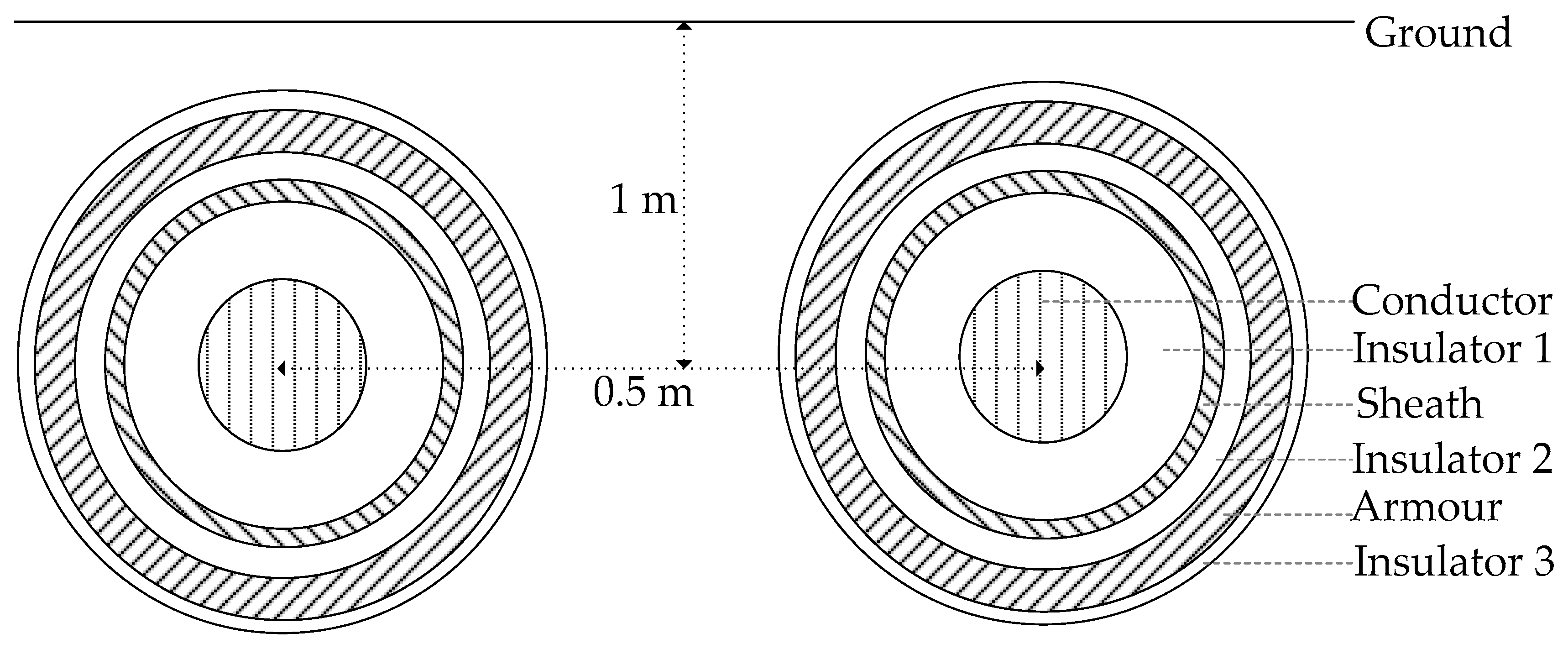
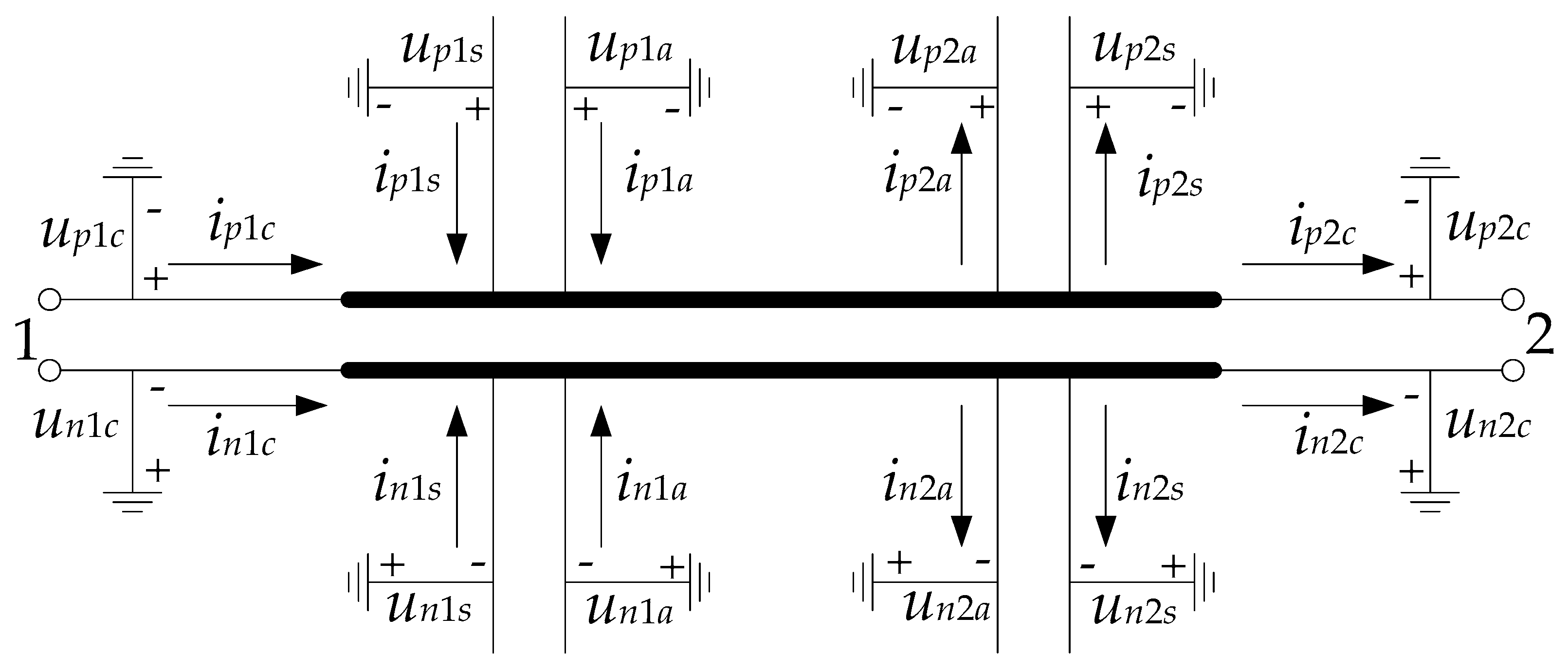
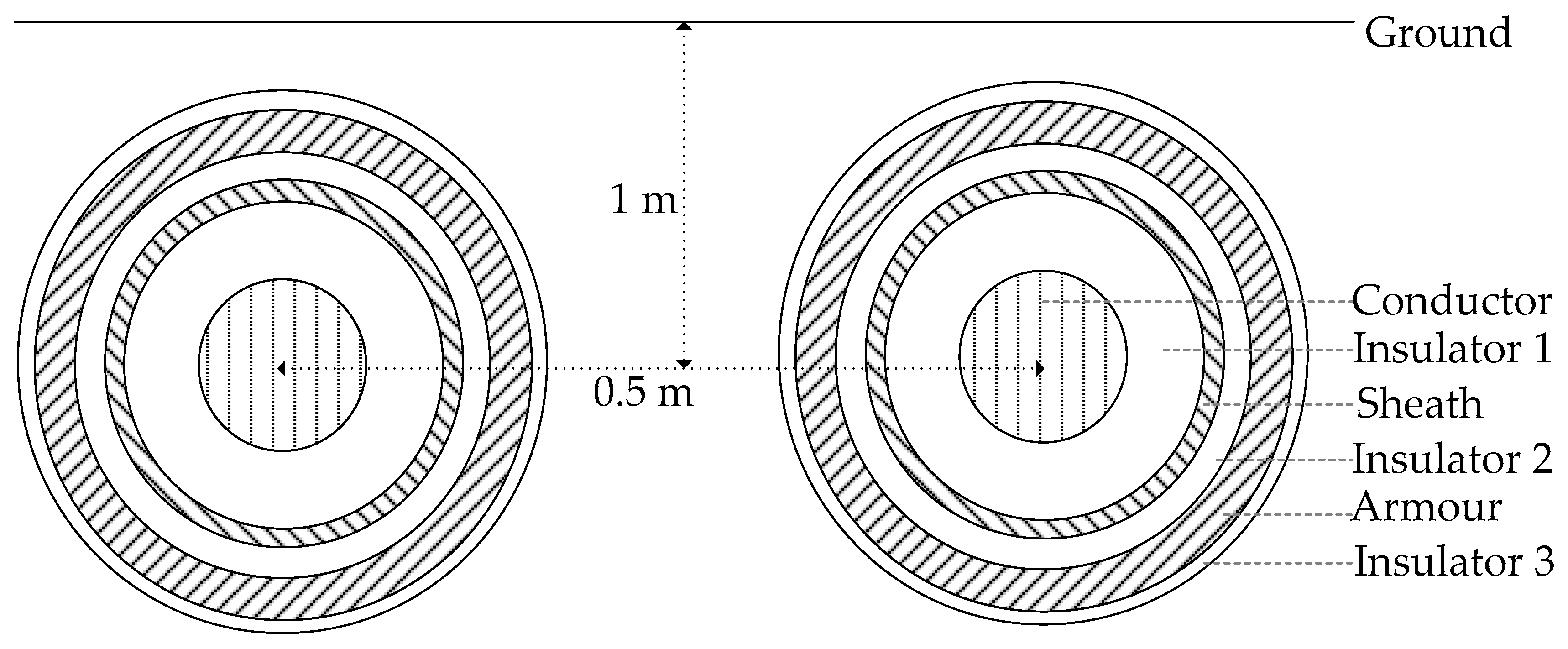
3.1. Phase-Mode Transform Method for Bipolar Cables
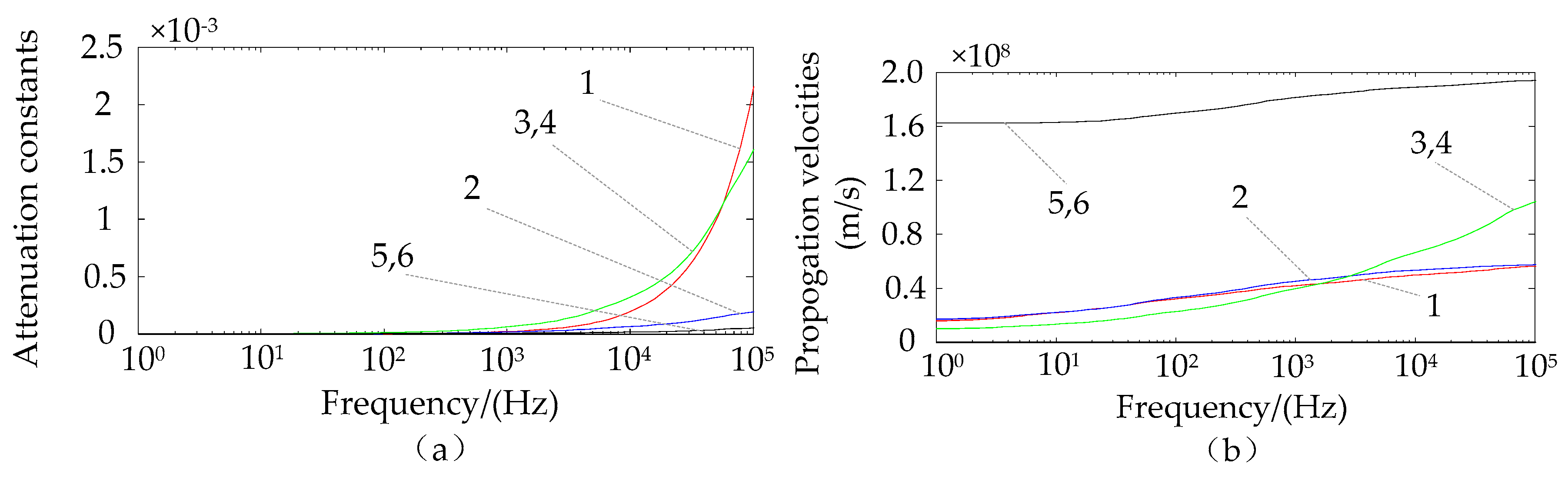
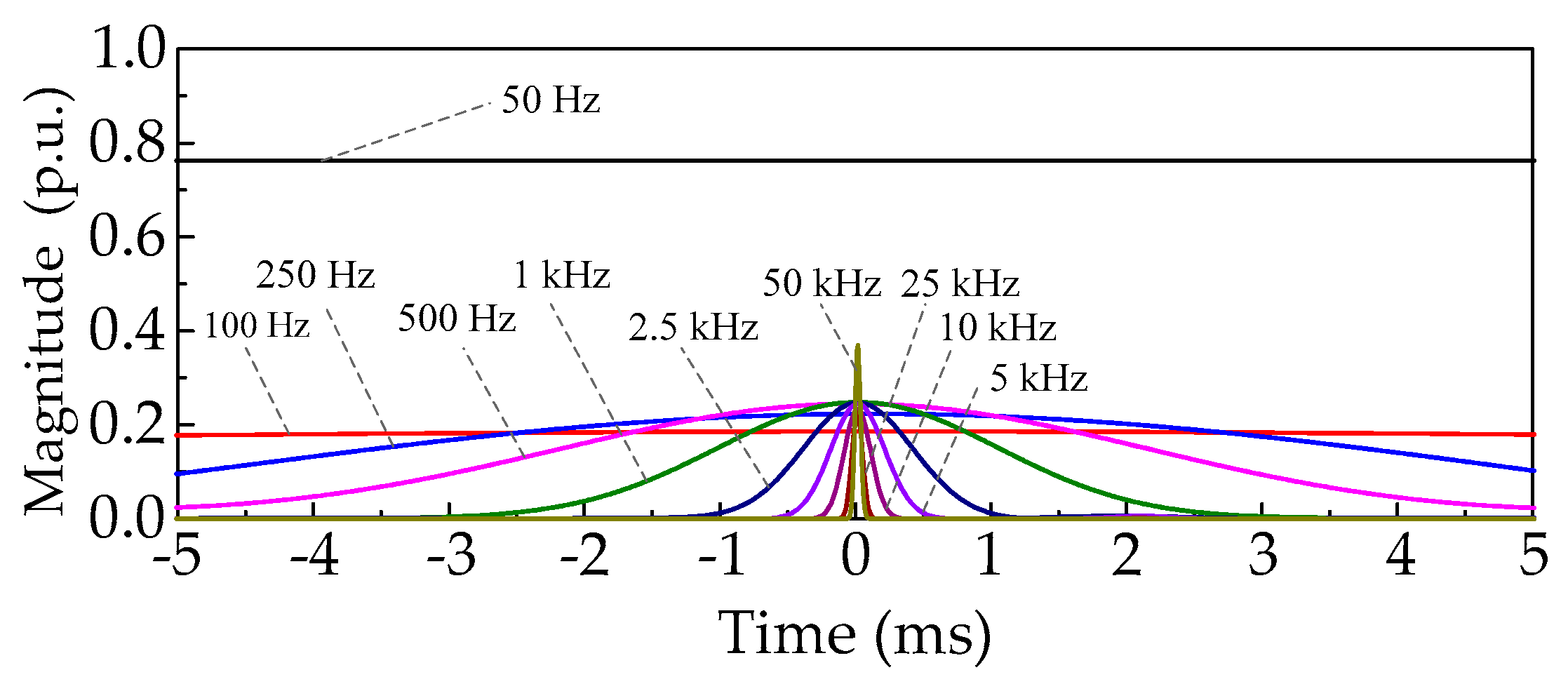
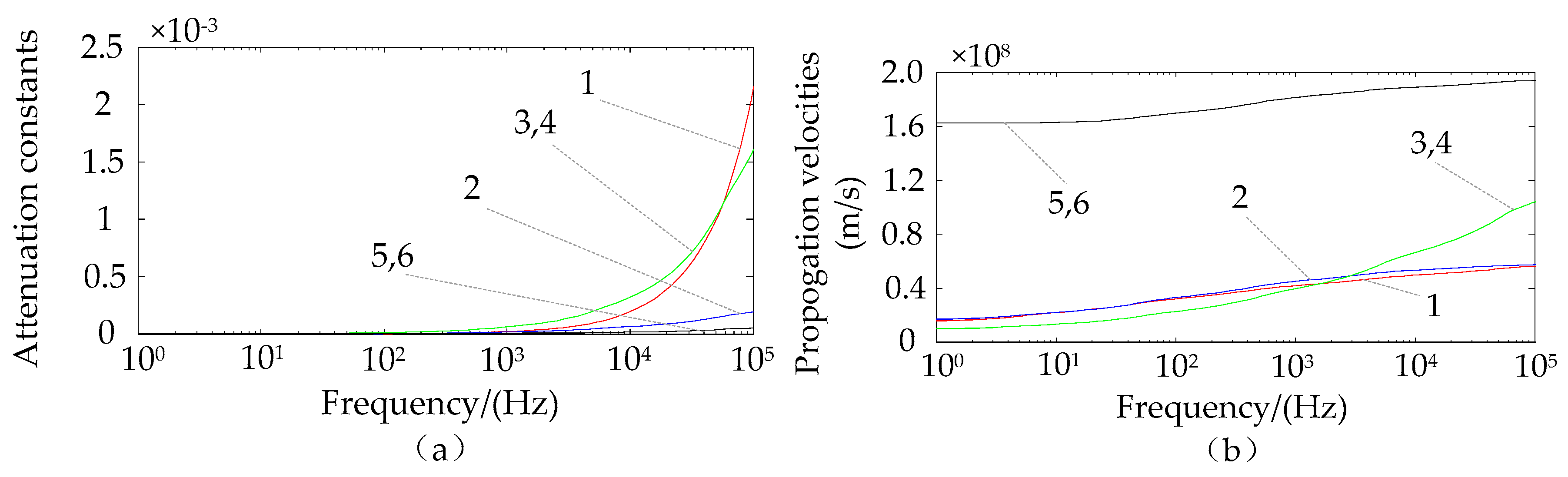
3.2. Propagation Characteristics of the Current Frequency Components
4. Fault-Location Method
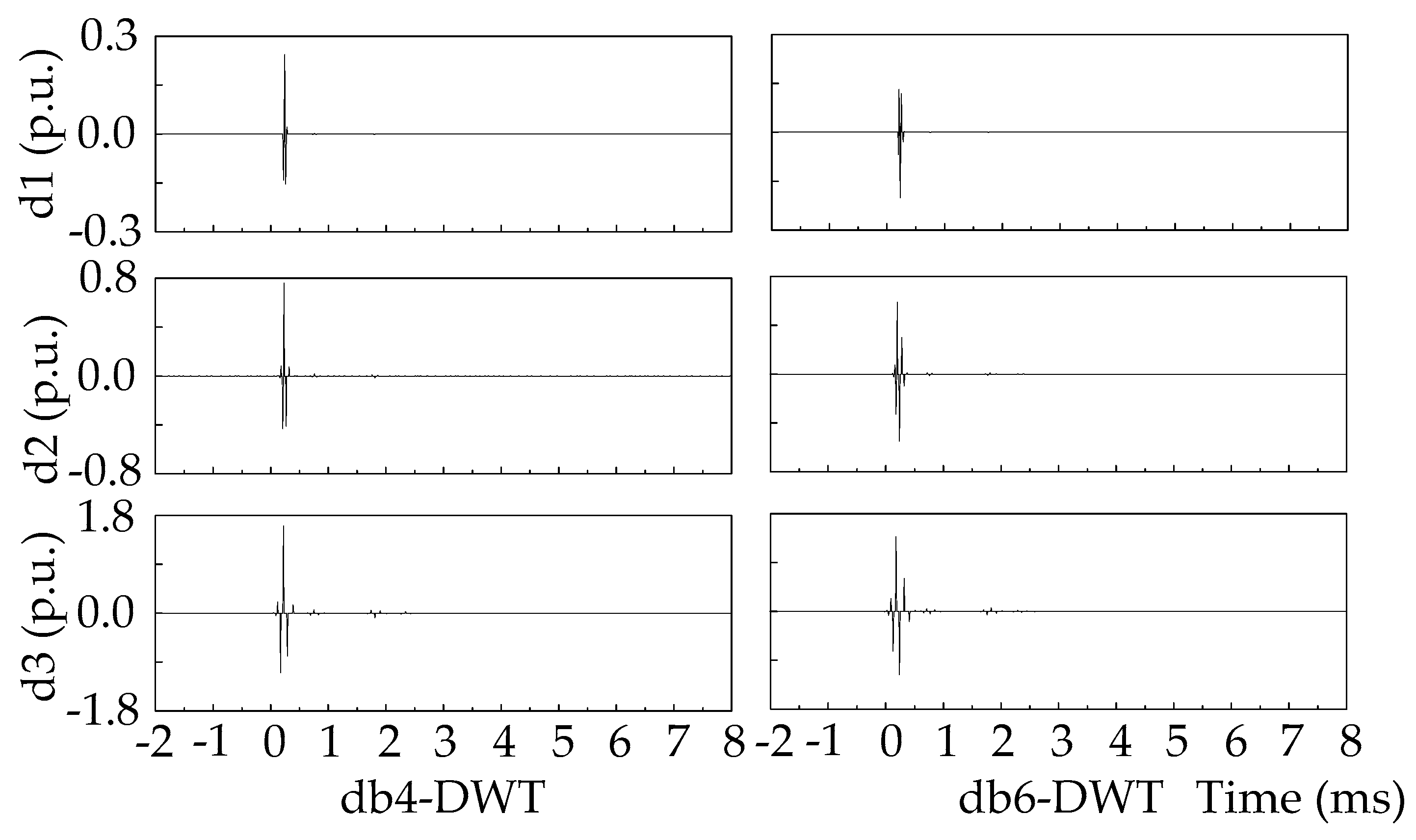
4.1. Extraction and Processing of Frequency Components
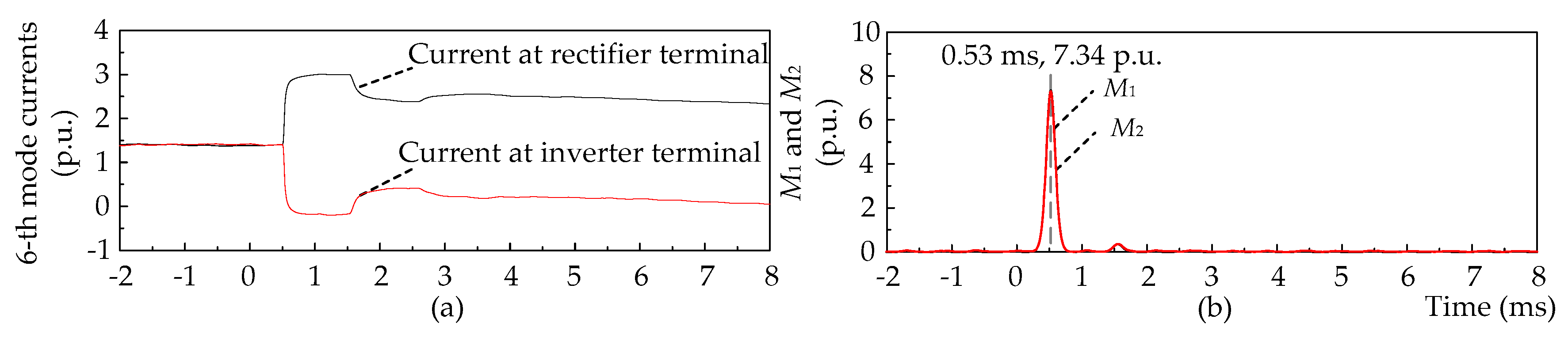
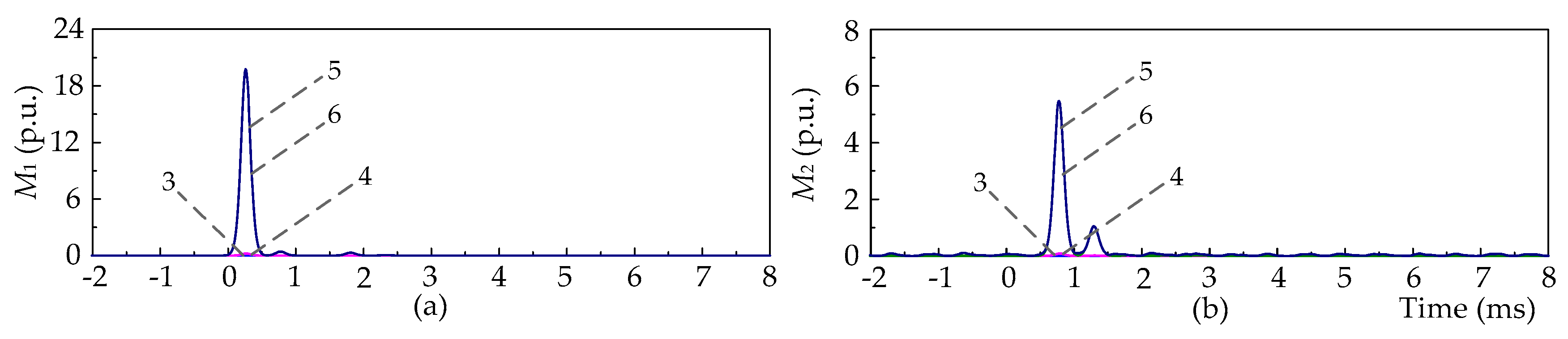
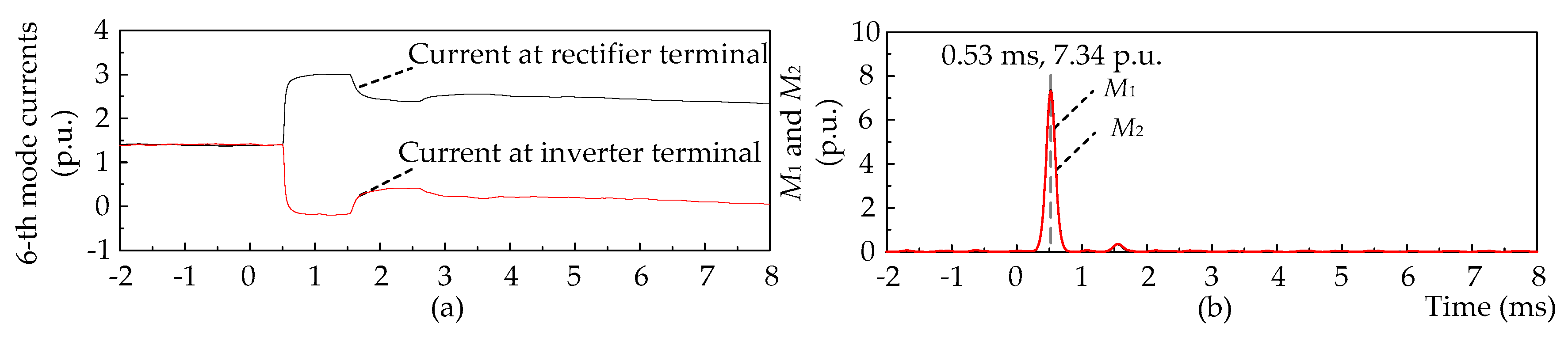
4.2. Determination of the Arrival Time
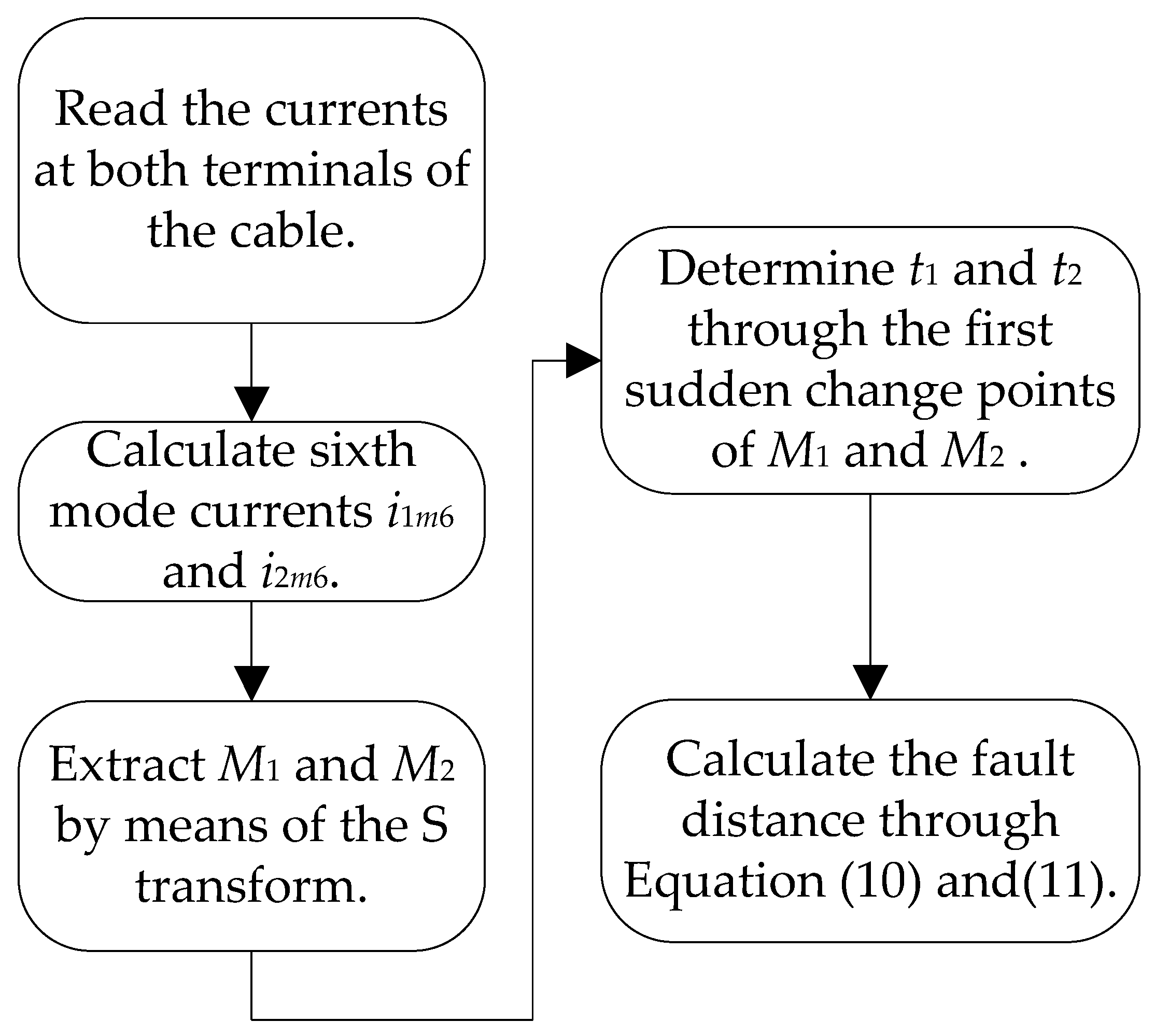
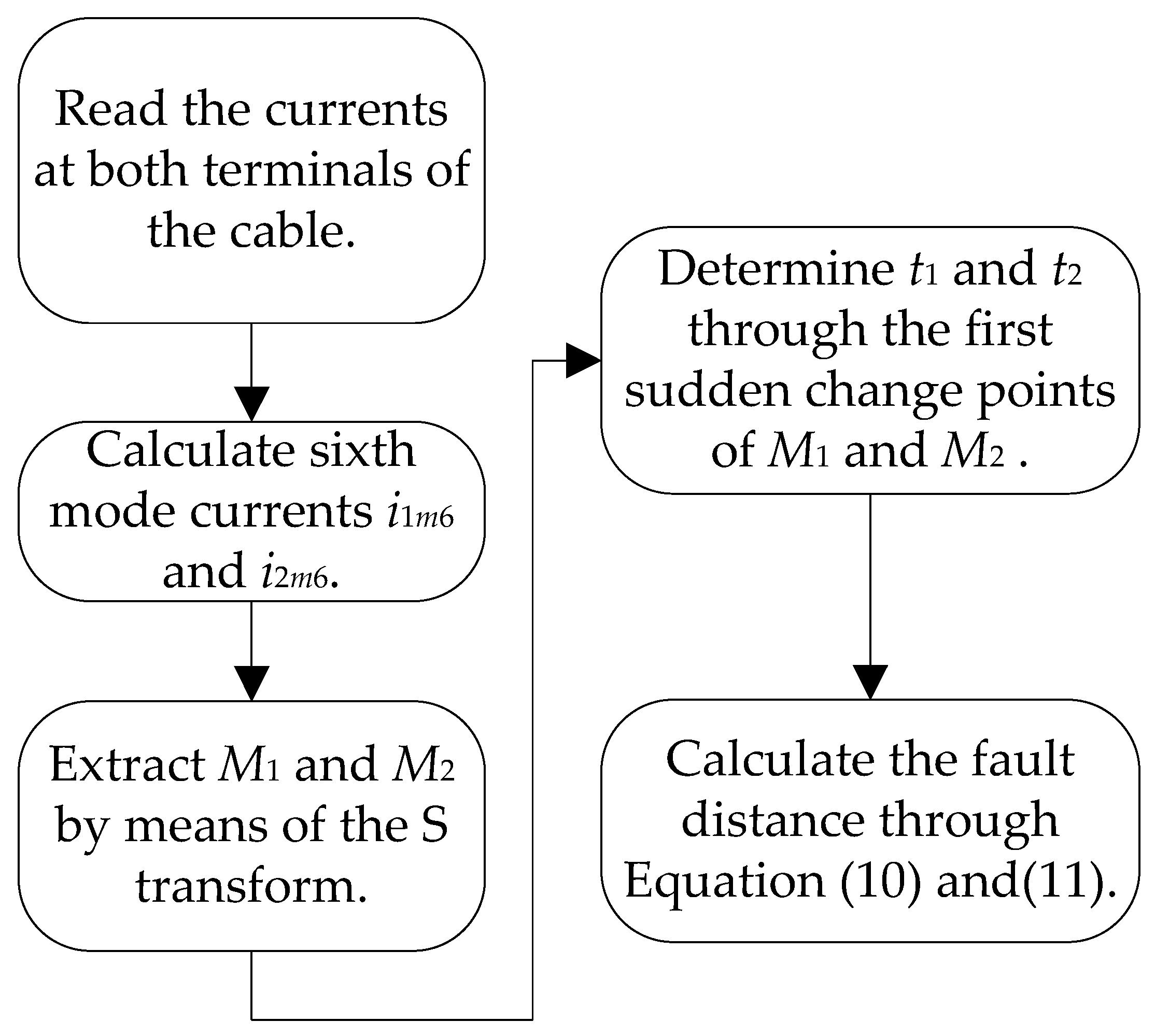
4.3. Flow Chart of the Fault-Location Method
5. Test System and Simulation Results
5.1. Test System
5.2. Testof the Determination Method of theArrival Time
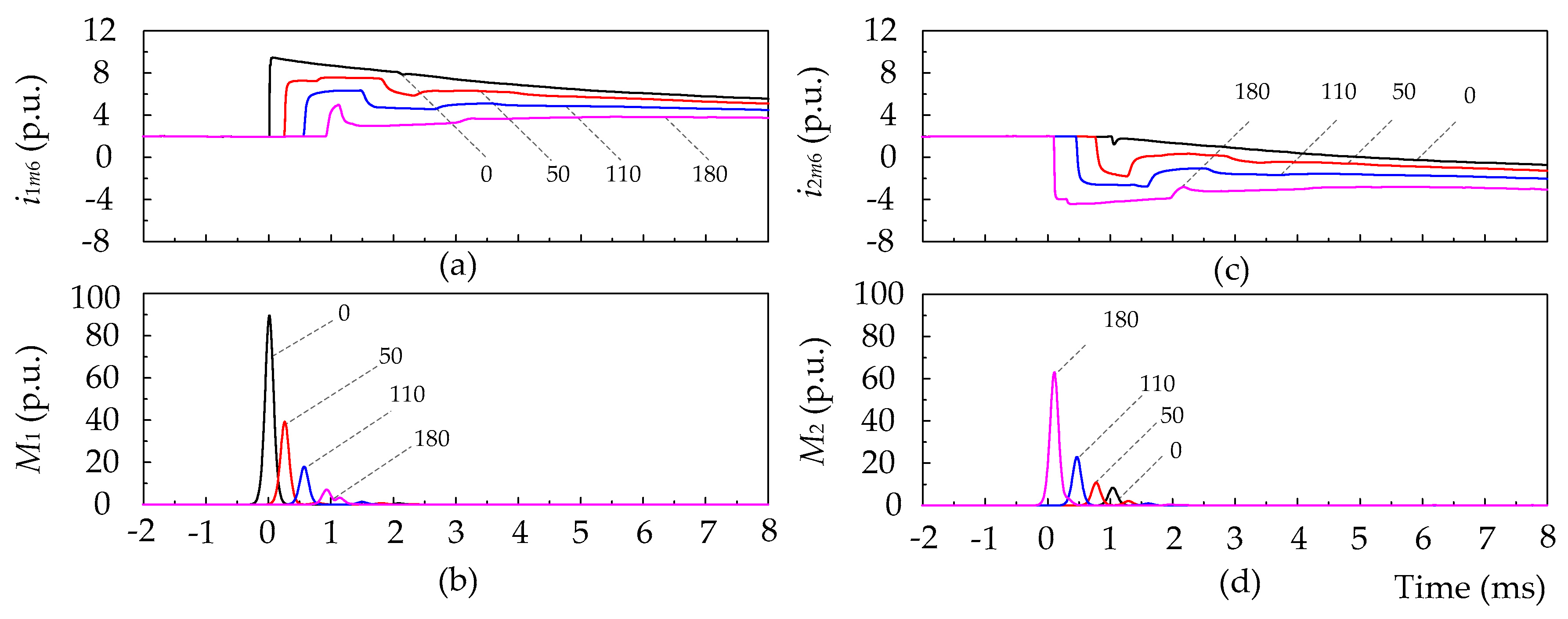
5.3. Fault-Location Results
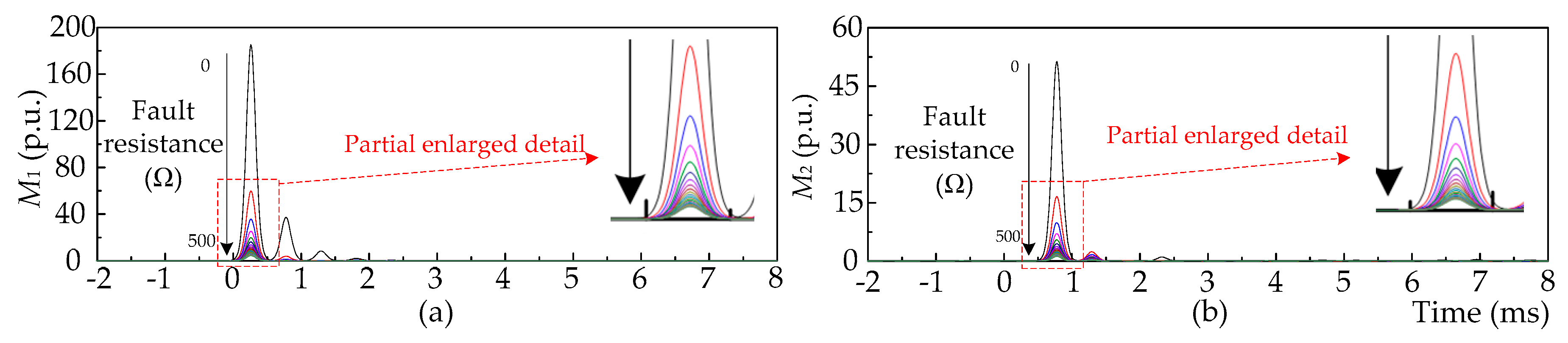
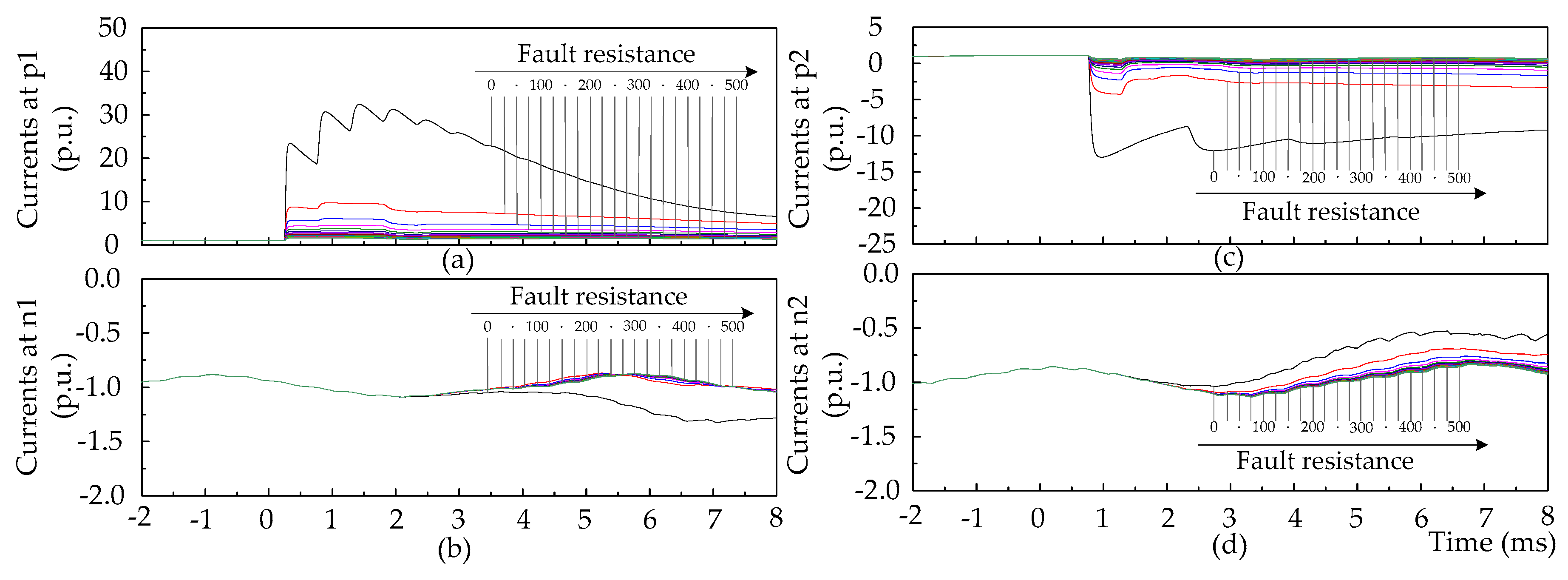
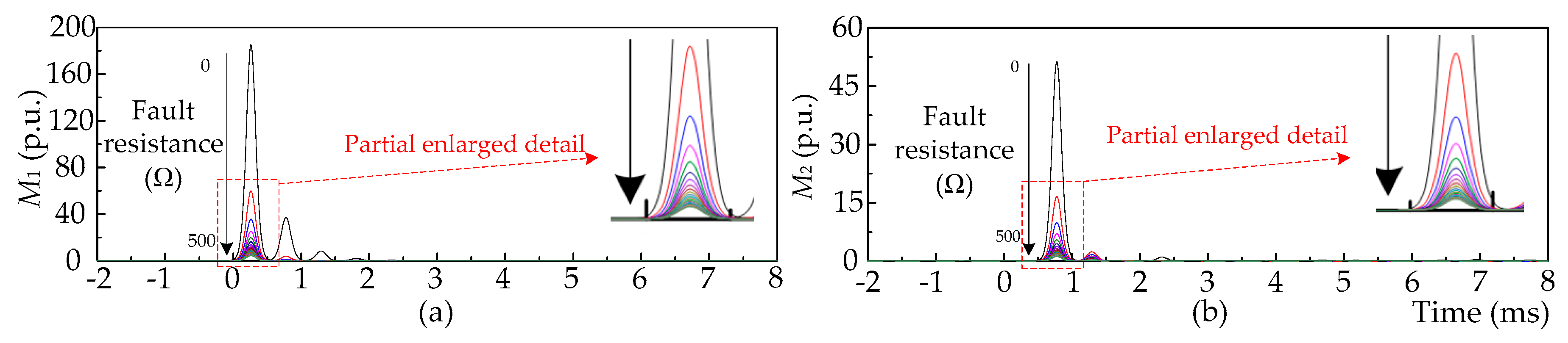
5.4. Influence of the Fault Resistance
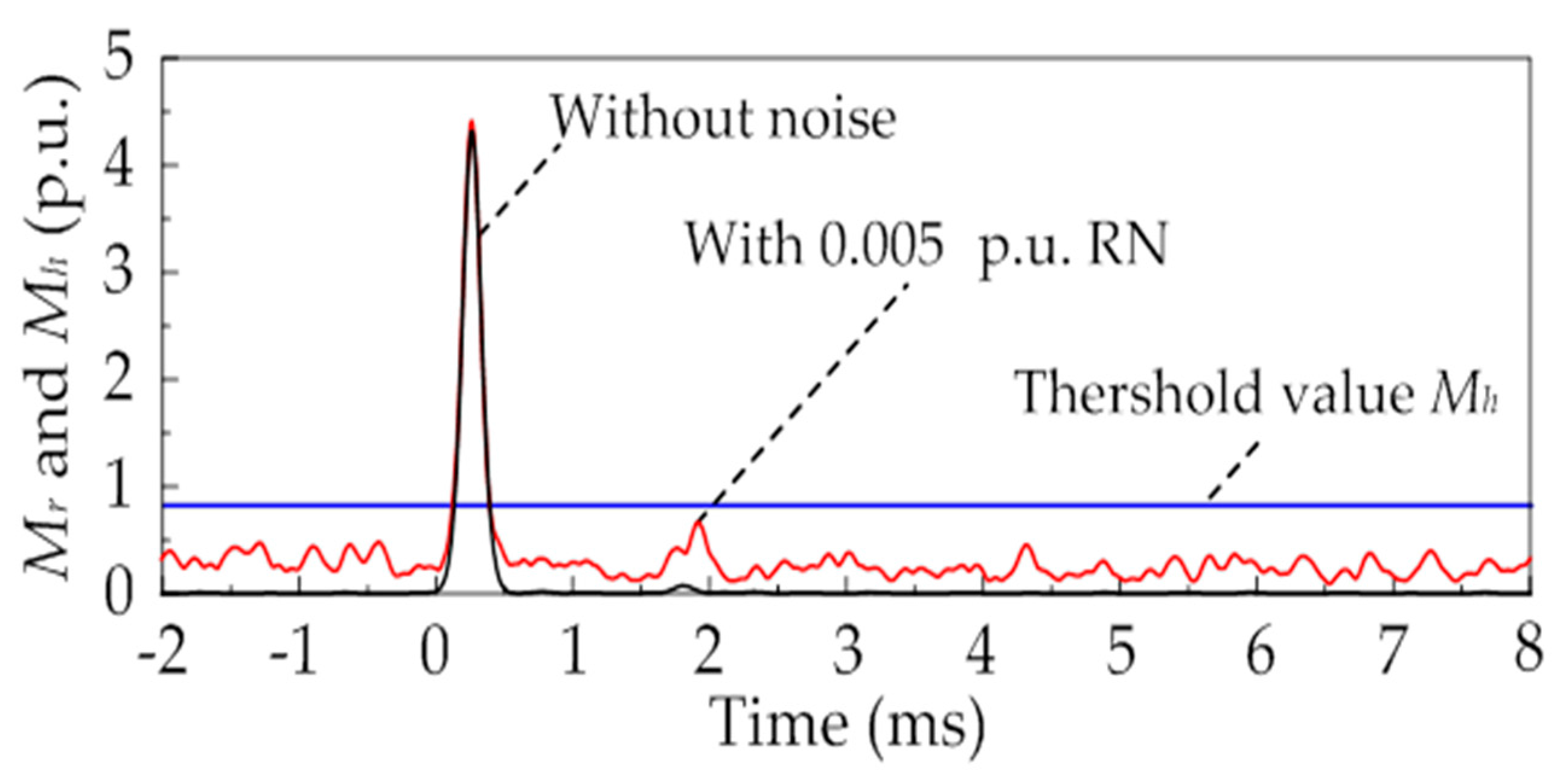
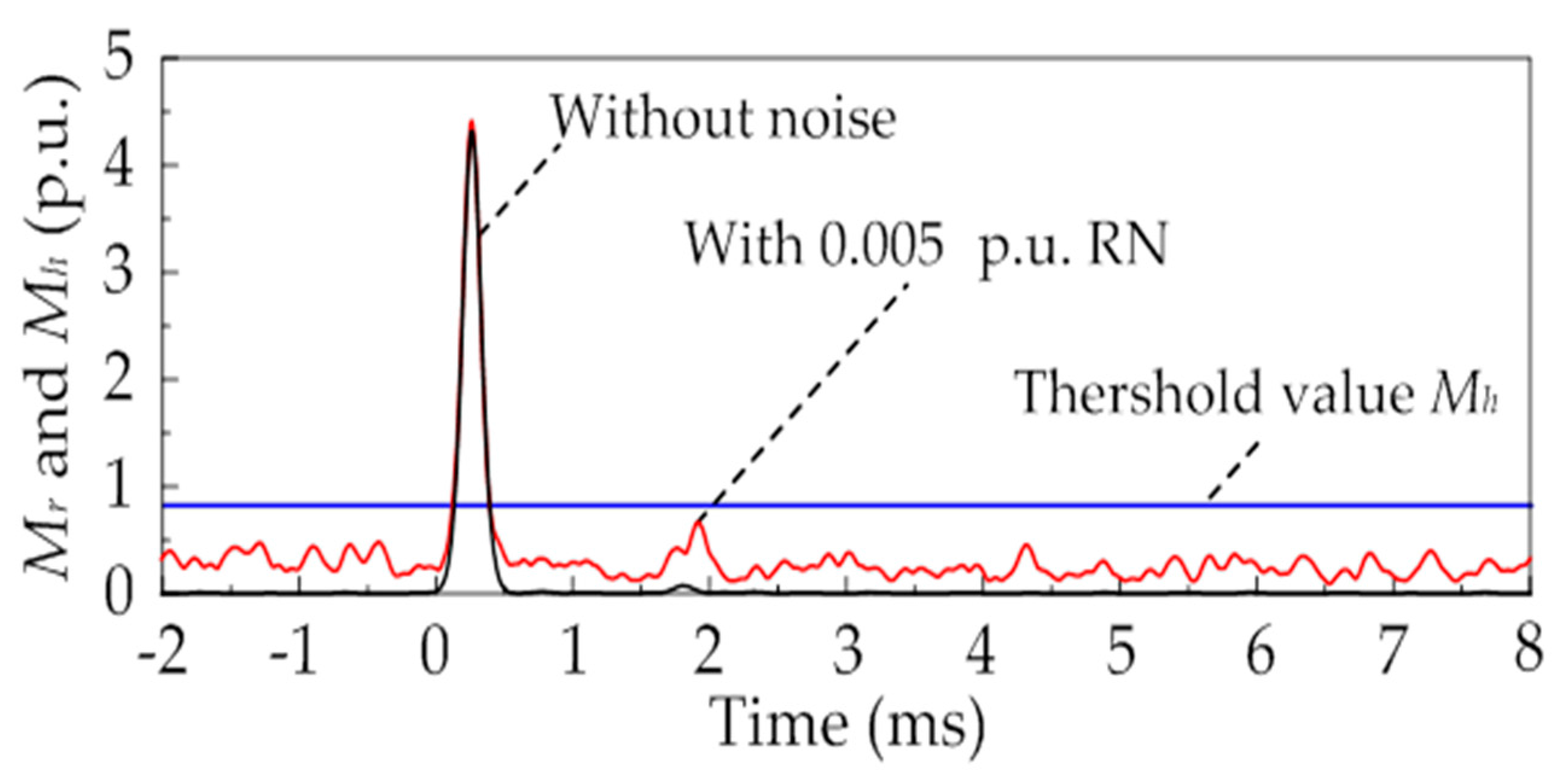
5.5. Influence of Noise
5.6. Effect of Sampling Rate
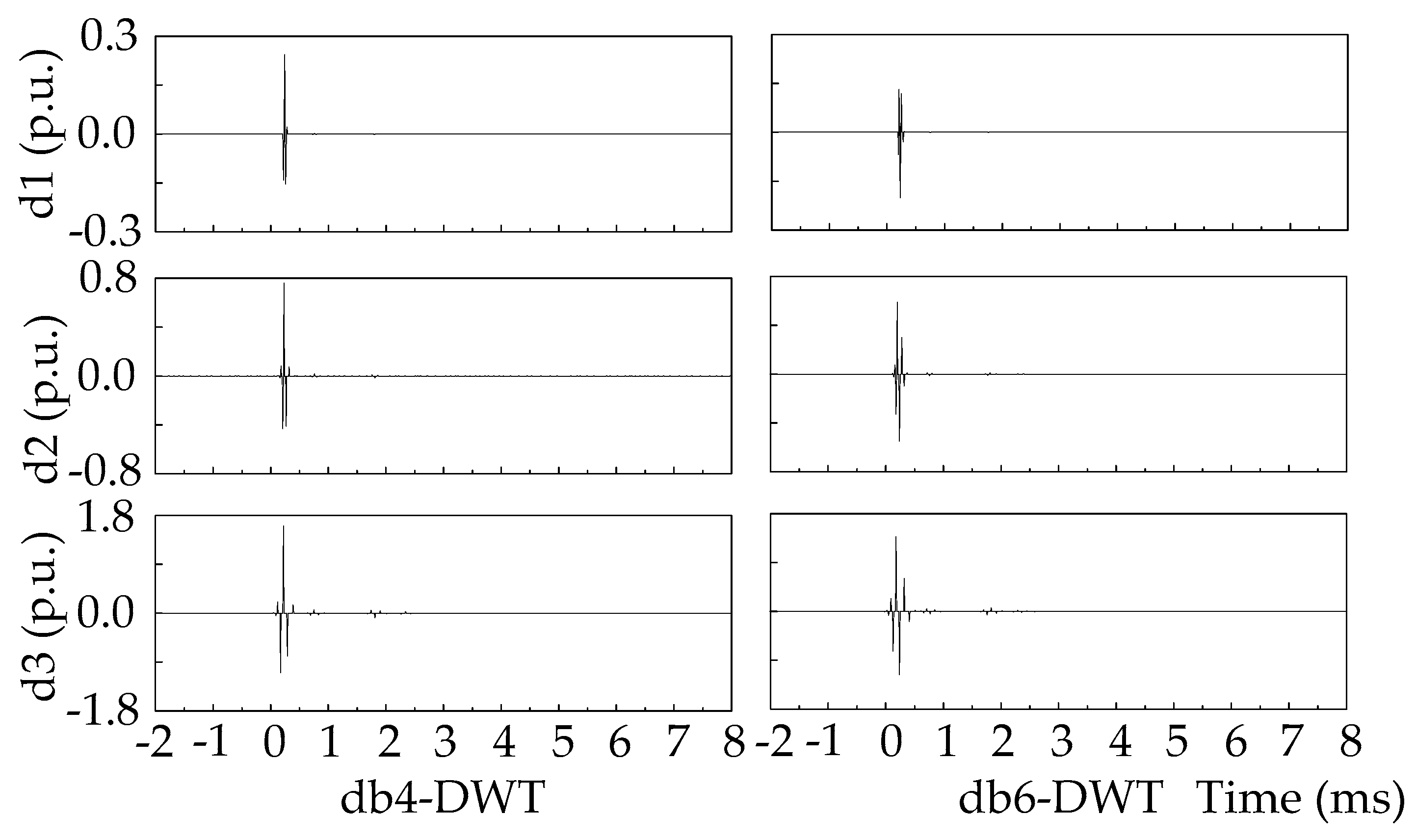
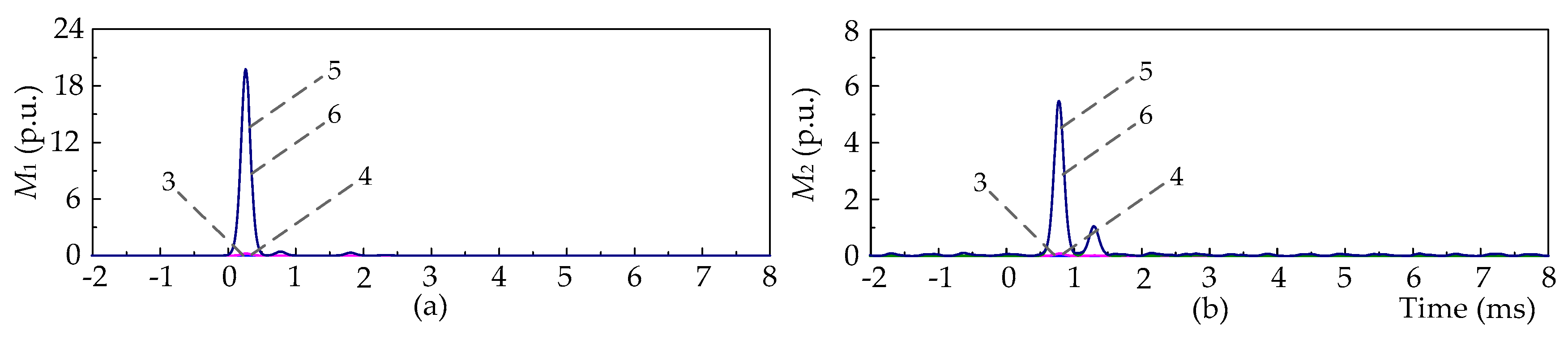
5.7. Comparison to the Conventional Method
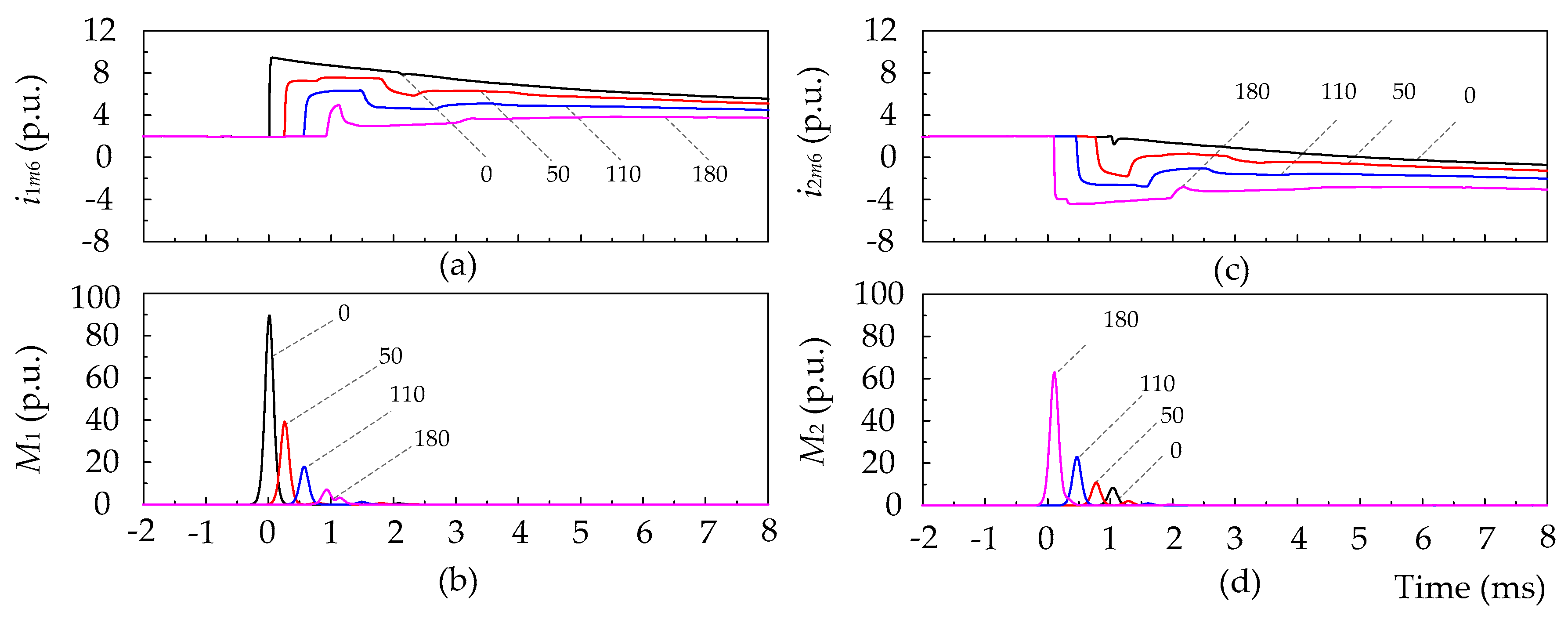
5.8. Comparison of Simulation Results to the Other Mode Currents
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Flourentzou, N.; Agelidis, G. VSC-based HVDC power transmission systems: An overview. IEEE Trans. Power Electron. 2009, 24, 592–599. [Google Scholar] [CrossRef]
- Bresesti, P.; Kling, W.L.; Hendriks, R.L. HVDC connection of offshore wind farms to the transmission system. IEEE Trans. Energy Convers. 2007, 1, 37–43. [Google Scholar] [CrossRef]
- Muhammad, R.; Kevin, S.; Oriol, G.B. Droop control design of multi-VSC systems for offshore networks to integrate wind energy. Energies 2016, 9, 826. [Google Scholar]
- Xie, J.; Chen, P. A traveling wave based fault locating system for HVDC transmission lines. In Proceedings of the 2006 International Conference on Power System Technology, Chongqing, China, 22–26 October 2006; pp. 1–4. [Google Scholar]
- Girgis, A.; Hart, D.G.; Peterson, W.L. A new fault location technique for two- and three-terminal lines. IEEE Trans. Power Deliv. 1992, 7, 98–107. [Google Scholar] [CrossRef]
- Magnago, F.H.; Abur, A. Fault location using wavelets. IEEE Trans. Power Deliv. 1998, 13, 1475–1480. [Google Scholar] [CrossRef]
- Rajesh, K.; Yadaiah, N. Fault identification using wavelet transform. In Proceedings of the 2005 IEEE PES Transmission and Distribution, Dalian, China, 15–18 August 2005; pp. 1–6. [Google Scholar]
- Nanayakkara, O.M.K.K.; Rajapakse, A.D.; Wachal, R. Traveling-wave-based line fault location in star-connected multiterminal HVDC systems. IEEE Trans. Power Deliv. 2012, 27, 2286–2294. [Google Scholar] [CrossRef]
- Azizi, S.; Sanaye-Pasand, M.; Hasani, A. A traveling-wave-based methodology for wide-area fault location in multiterminal DC systems. IEEE Trans. Power Deliv. 2014, 29, 2552–2560. [Google Scholar] [CrossRef]
- Nanayakkara, O.M.K.K.; Rajapakse, A.D.; Wachal, R. Location of DC line faults in conventional HVDC systems with segments of cables and overhead lines using terminal measurements. IEEE Trans. Power Deliv. 2012, 27, 279–288. [Google Scholar] [CrossRef]
- Brahma, S.M.; Girgis, A. Fault location on a transmission line using synchronized voltage measurements. IEEE Trans. Power Deliv. 2004, 19, 1619–1622. [Google Scholar] [CrossRef]
- Shukr, M.; Thomas, D.W.P.; Zanchetta, P. VSC-HVDC transmission line faults location using active line impedance estimation. In Proceedings of the 2012 IEEE International Energy Conference and Exhibition, Florence, Italy, 9–12 September 2012; pp. 244–248. [Google Scholar]
- Farshad, M.; Sadeh, J. A novel fault-location method for HVDC transmission lines based on similarity measure of voltage signals. IEEE Trans. Power Deliv. 2013, 28, 2483–2490. [Google Scholar] [CrossRef]
- Suonan, J.; Gao, S.; Song, G. A novel fault-location method for HVDC transmission lines. IEEE Trans. Power Deliv. 2010, 25, 1203–1209. [Google Scholar] [CrossRef]
- Yang, J.; Fletcher, J.E.; O’Reilly, J. Short-circuit and ground fault analysis and location in VSC-based DC network cables. IEEE Trans. Ind. Electron. 2011, 59, 3827–3837. [Google Scholar] [CrossRef]
- Stockwell, R.G.; Mansinha, L.; Lowe, R.P. Localization of the complex spectrum: The S transform. IEEE Trans. Signal. Process. 1996, 44, 998–1001. [Google Scholar] [CrossRef]
- Lee, I.W.C.; Dash, P.K. S-transform-based intelligent system for classification of power quality disturbance signals. IEEE Trans. Ind. Electron. 2003, 50, 800–805. [Google Scholar] [CrossRef]
- Huang, N.T.; Peng, H.; Cai, G.W. Power quality disturbances feature selection and recognition using optimal multi-resolution fast S-transform and CART algorithm. Energies 2016, 9, 927. [Google Scholar] [CrossRef]
- Zhao, F.; Yang, R. Power-quality disturbance recognition using S-transform. IEEE Trans. Power Deliv. 2007, 22, 944–950. [Google Scholar] [CrossRef]
- Wang, H.H.; Wang, P.; Liu, T. Power quality disturbance classification using the S-transform and probabilistic neural network. Energies 2017, 10, 107. [Google Scholar] [CrossRef]
- Ahmadimanesh, A.; Shahrtash, S.M. Transient-based fault-location method for multiterminal lines employing S-transform. IEEE Trans. Power Deliv. 2013, 28, 1373–1380. [Google Scholar] [CrossRef]
- Dommel, H.W. EMTP Theory Book; Bonneville Power Administration: Portland, OR, USA, 1987; pp. 150–161. [Google Scholar]
- Chen, Y.L.; Gong, Q.W.; Chen, Y.P. Traveling wave fault location for crossbonded HV cables. High. Volt. Eng. 2008, 34, 799–803. [Google Scholar]
- Heydt, G.T.F.; Galli, A.W. Transient power quality problems analyzed using wavelets. IEEE Trans. Power Deliv. 1997, 12, 908–915. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Distance (km) | Fault Resistance (Ω) | t1 (ms) | t2 (ms) | Estimated Distance (km) | Fault-Location Error (%) |
|---|---|---|---|---|---|
| 0 | 0 | 0.01 | 1.03 | 1.7897 | 0.8948 |
| 100 | 0.01 | 1.04 | 0.8268 | 0.4134 | |
| 500 | 0.01 | 1.04 | 0.8268 | 0.4134 | |
| 50 | 0 | 0.26 | 0.78 | 49.932 | 0.3402 |
| 100 | 0.26 | 0.78 | 49.932 | 0.3402 | |
| 500 | 0.26 | 0.78 | 49.932 | 0.3402 | |
| 110 | 0 | 0.57 | 0.47 | 109.63 | 0.1857 |
| 100 | 0.57 | 0.47 | 109.63 | 0.1857 | |
| 500 | 0.57 | 0.47 | 109.63 | 0.1857 | |
| 180 | 0 | 0.93 | 0.11 | 178.95 | 0.5233 |
| 100 | 0.93 | 0.11 | 178.95 | 0.5233 | |
| 500 | 0.93 | 0.11 | 178.95 | 0.5233 |
| Fault Distance (km) | t1 (ms) | t2 (ms) | Estimated Distance (km) | Fault-Location Error (%) |
|---|---|---|---|---|
| 0 | 0.01 | 1.04 | 0.8268 | 0.4134 |
| 50 | 0.26 | 0.78 | 49.932 | 0.3402 |
| 110 | 0.57 | 0.47 | 109.63 | 0.1857 |
| 180 | 0.93 | 0.11 | 178.95 | 0.5233 |
| Fault Distance (km) | 0 | 50 | 110 | 180 |
| Fault-Location Error (%) | 0.5494 | 0.3402 | 0.2957 | 1.004 |
| Sampling Rate (kHz) | Fault Distance (km) | |||
|---|---|---|---|---|
| 0 | 50 | 110 | 180 | |
| Maximum Fault-Location Error (%) | ||||
| 100 | 0.4134 | 0.3402 | 0.1857 | 0.5233 |
| 200 | 0.2474 | 0. 4154 | 0.0549 | 0.2826 |
| 500 | 0.0991 | 0.3511 | 0.0005 | 0.0716 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, P.; Chen, Q.; Sun, K.; Xi, C. A Current Frequency Component-Based Fault-Location Method for Voltage-Source Converter-Based High-Voltage Direct Current (VSC-HVDC) Cables Using the S Transform. Energies 2017, 10, 1115. https://doi.org/10.3390/en10081115
Zhao P, Chen Q, Sun K, Xi C. A Current Frequency Component-Based Fault-Location Method for Voltage-Source Converter-Based High-Voltage Direct Current (VSC-HVDC) Cables Using the S Transform. Energies. 2017; 10(8):1115. https://doi.org/10.3390/en10081115
Chicago/Turabian StyleZhao, Pu, Qing Chen, Kongming Sun, and Chuanxin Xi. 2017. "A Current Frequency Component-Based Fault-Location Method for Voltage-Source Converter-Based High-Voltage Direct Current (VSC-HVDC) Cables Using the S Transform" Energies 10, no. 8: 1115. https://doi.org/10.3390/en10081115