Impacts of Power Grid Frequency Deviation on Time Error of Synchronous Electric Clock and Worldwide Power System Practices on Time Error Correction


Abstract
:1. Introduction
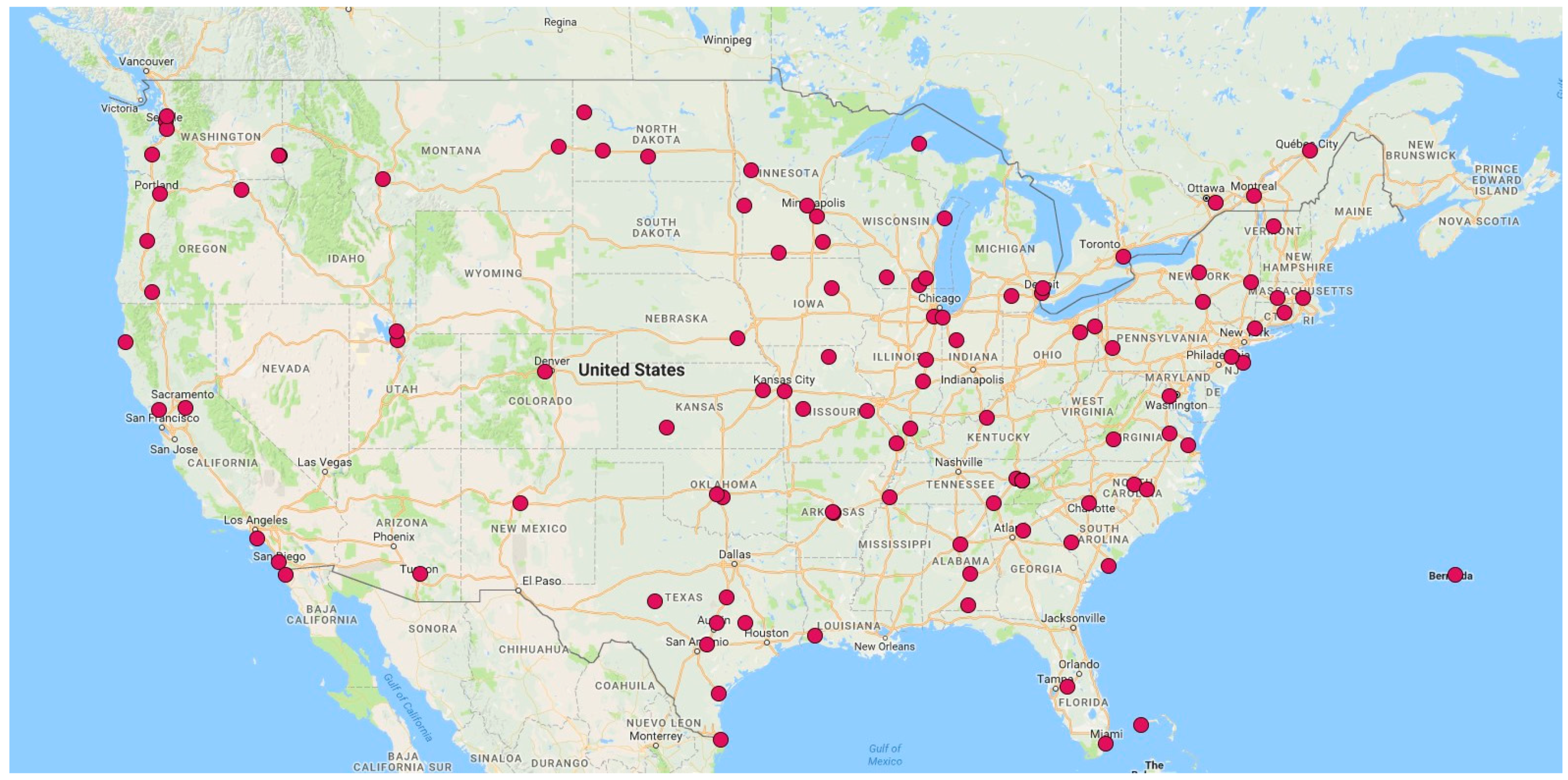
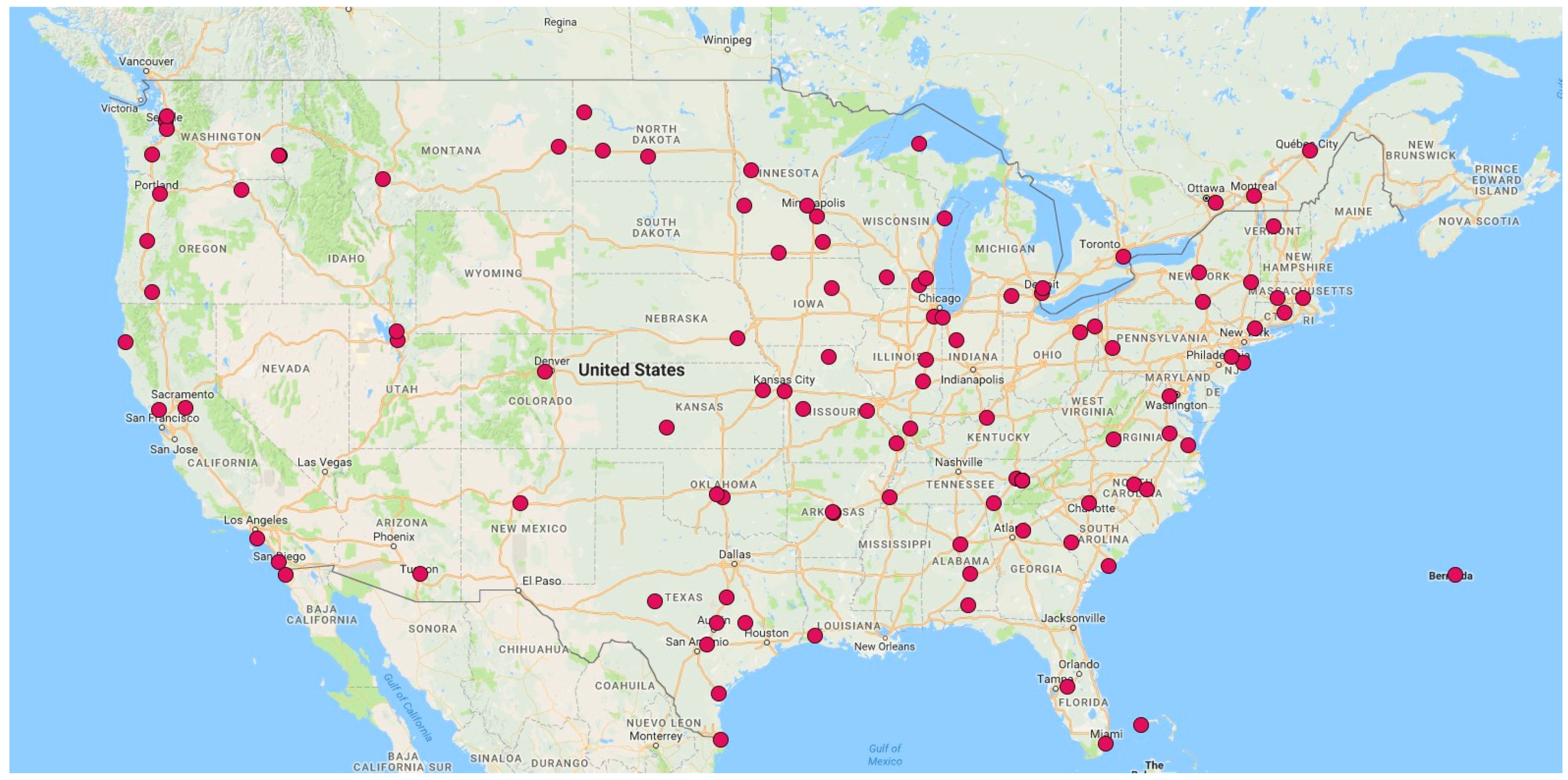
2. Wide-Area Frequency Monitoring Network FNET/GridEye
3. Statistical Analysis on Time Error of Synchronous Electric Clock
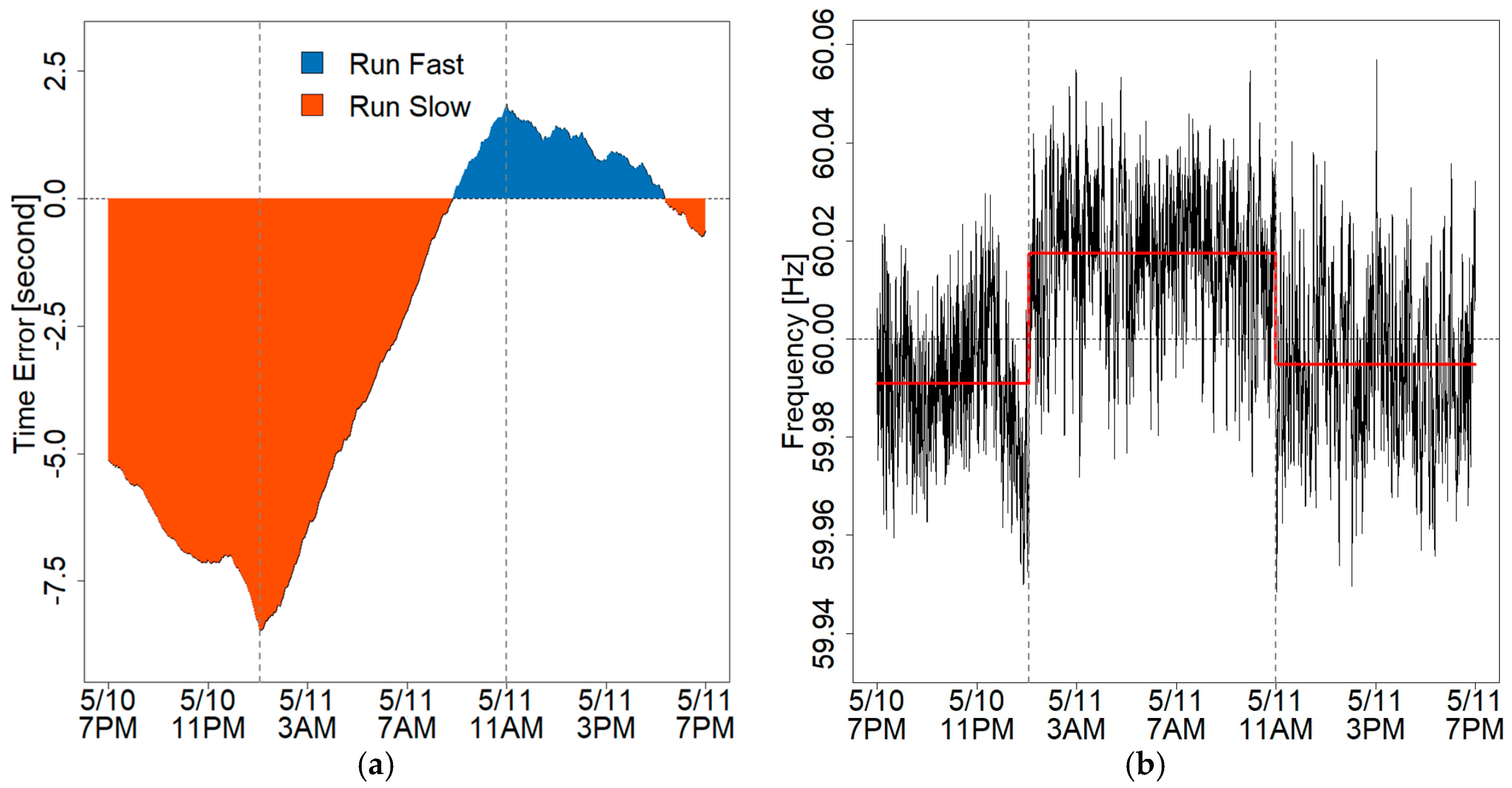
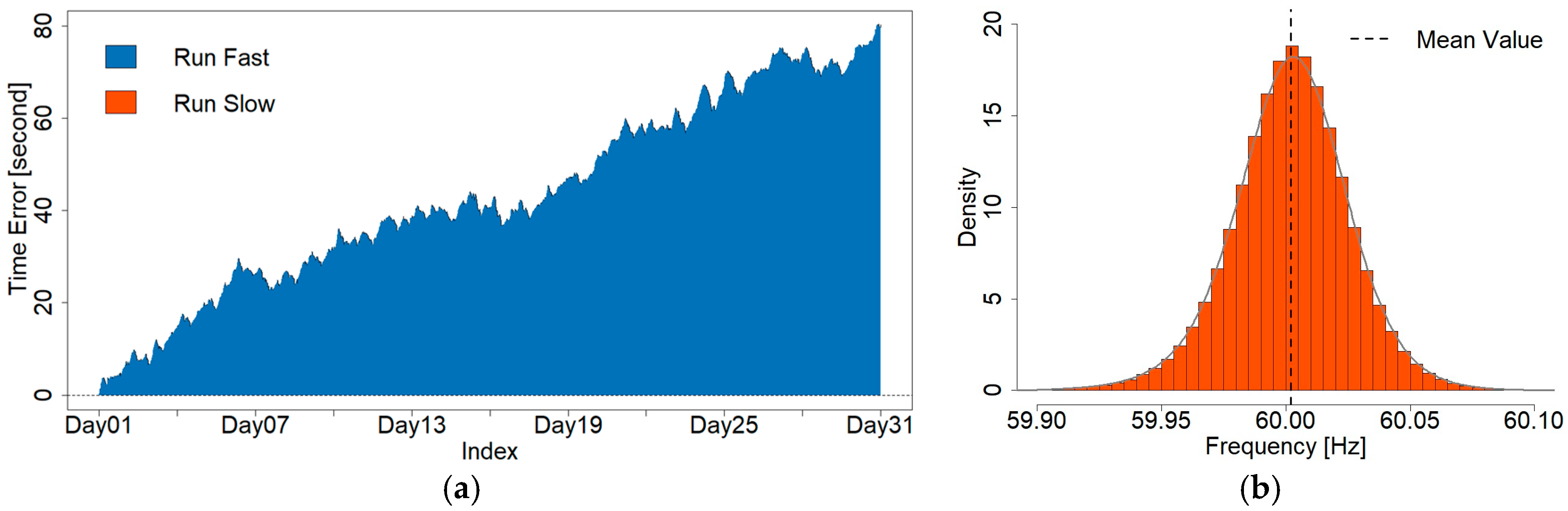
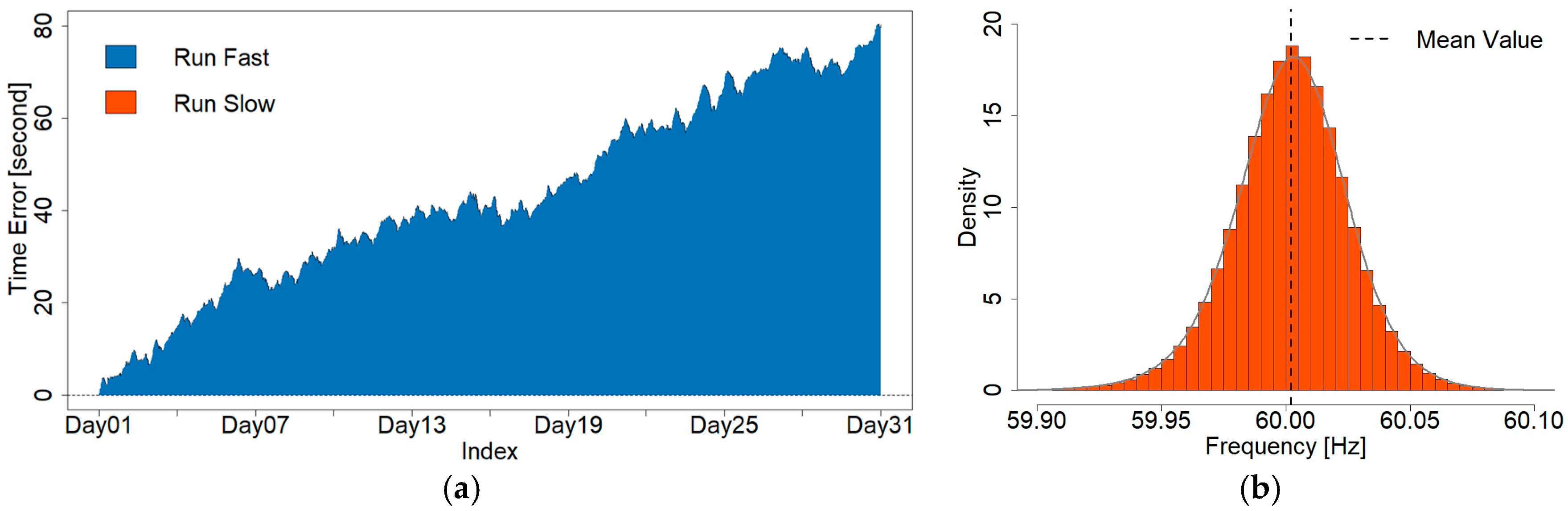
3.1. Time Error Calculation
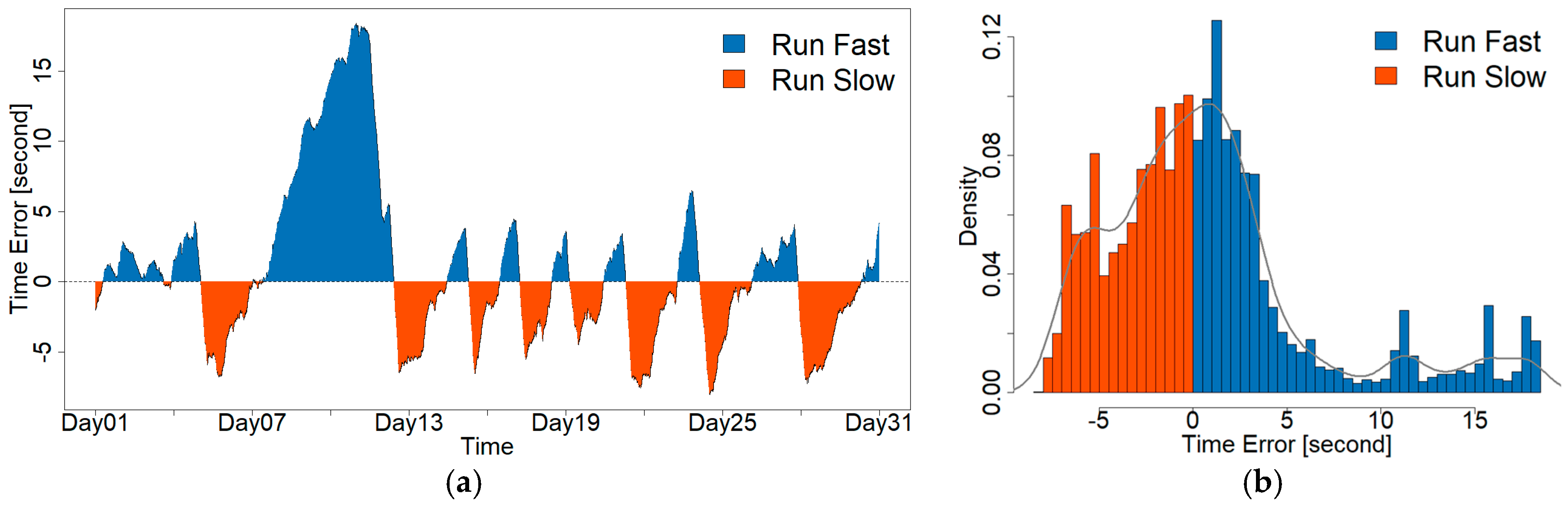
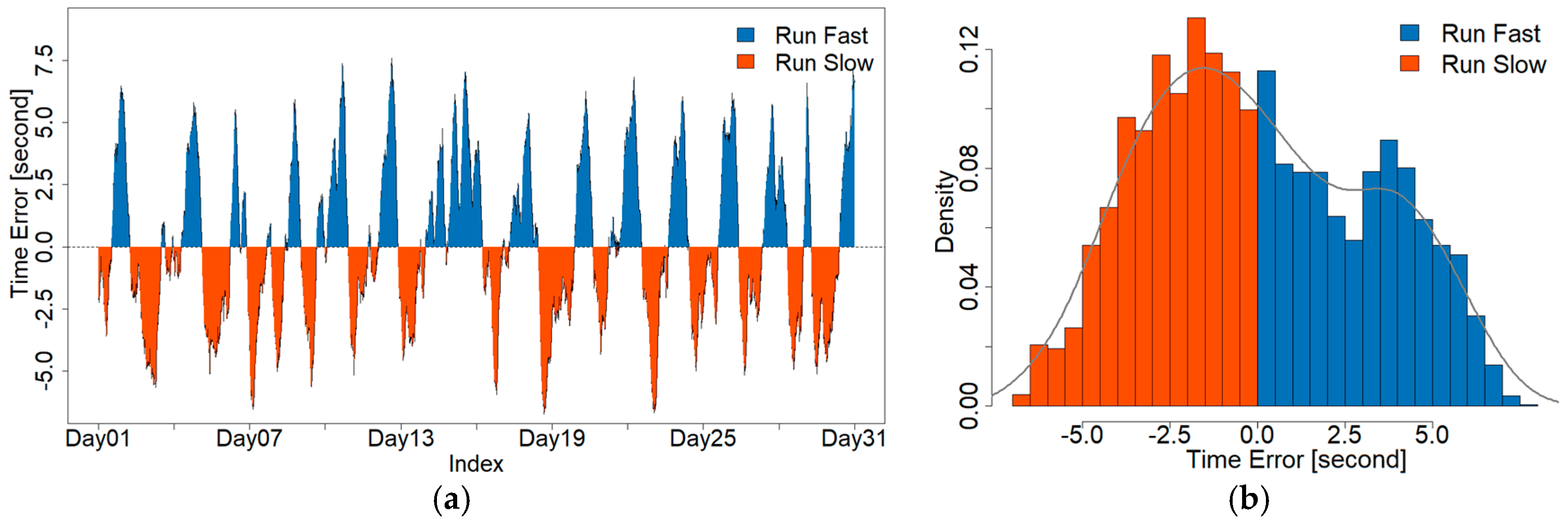
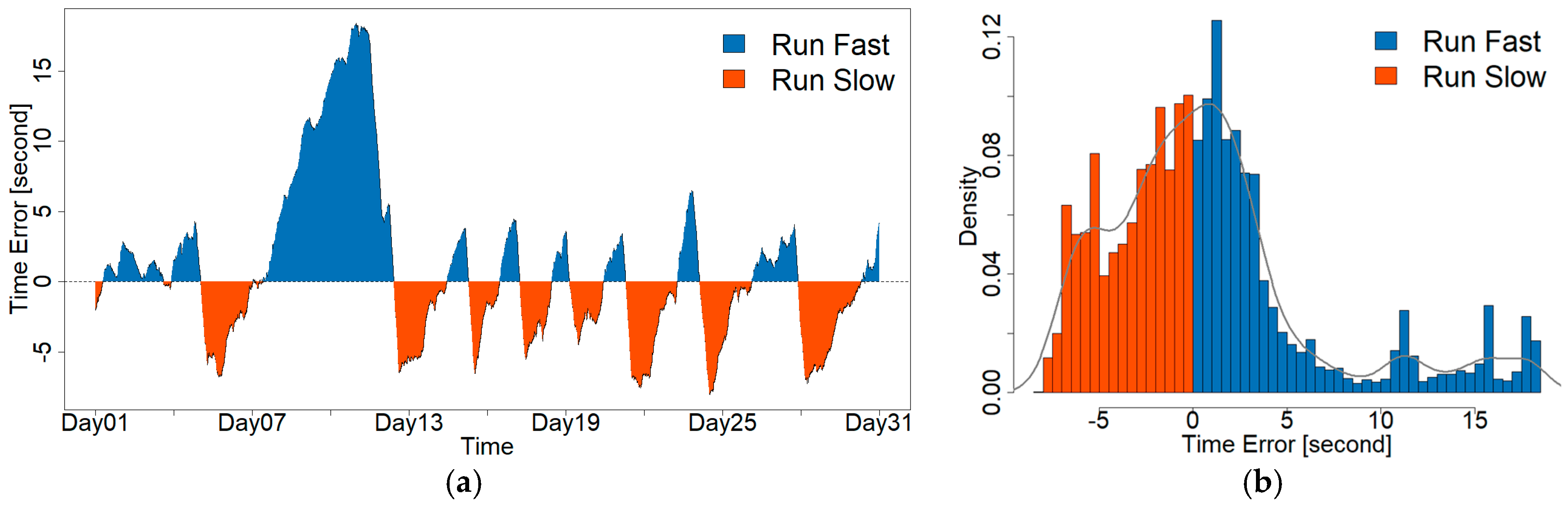
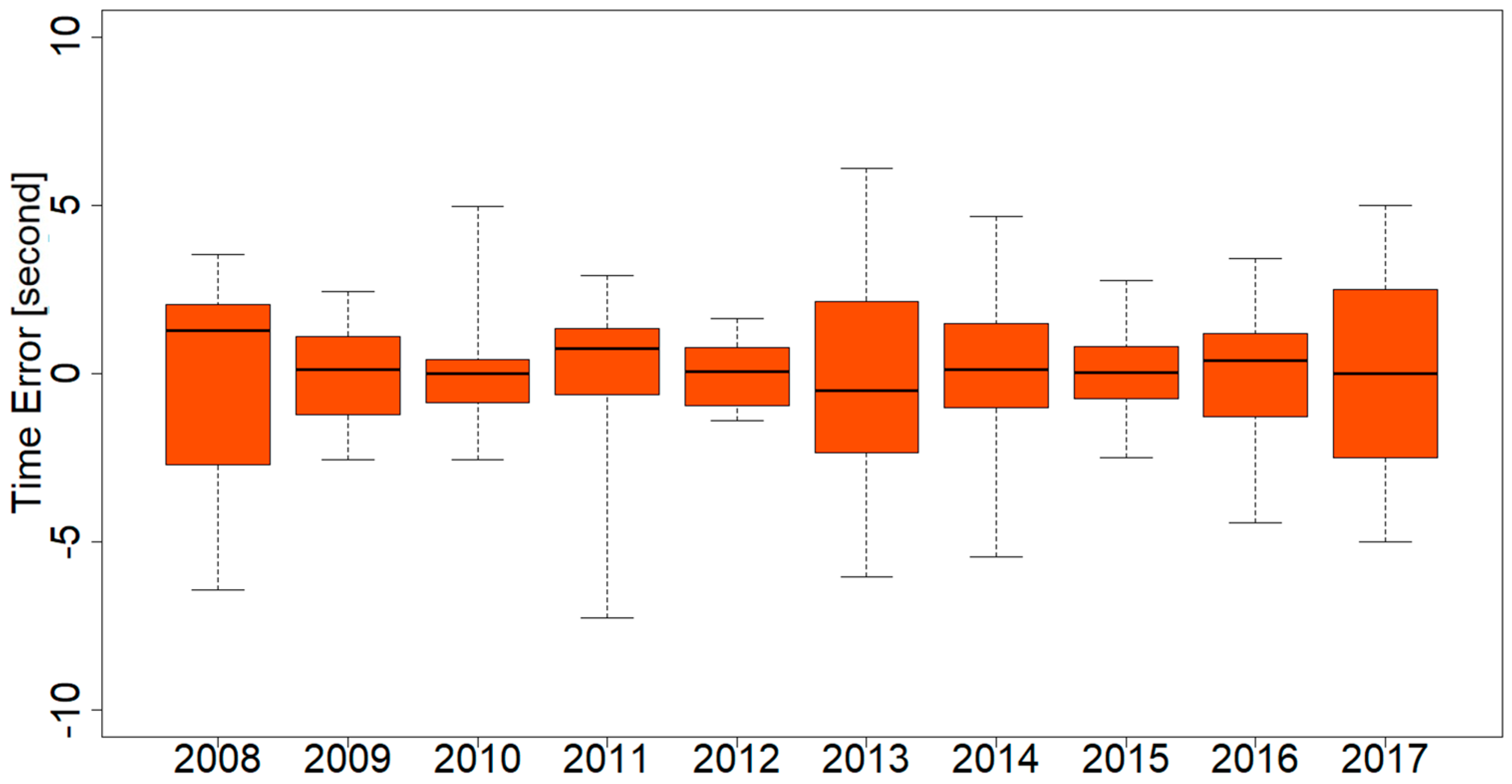
3.2. Time Error Analysis in North America
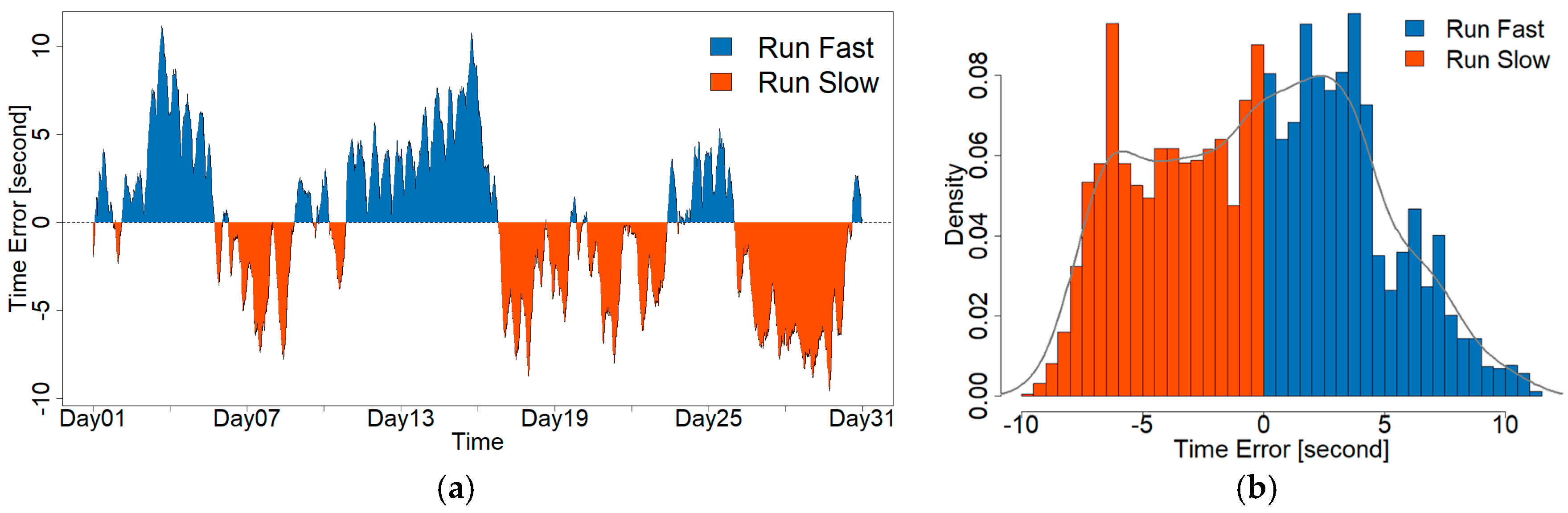
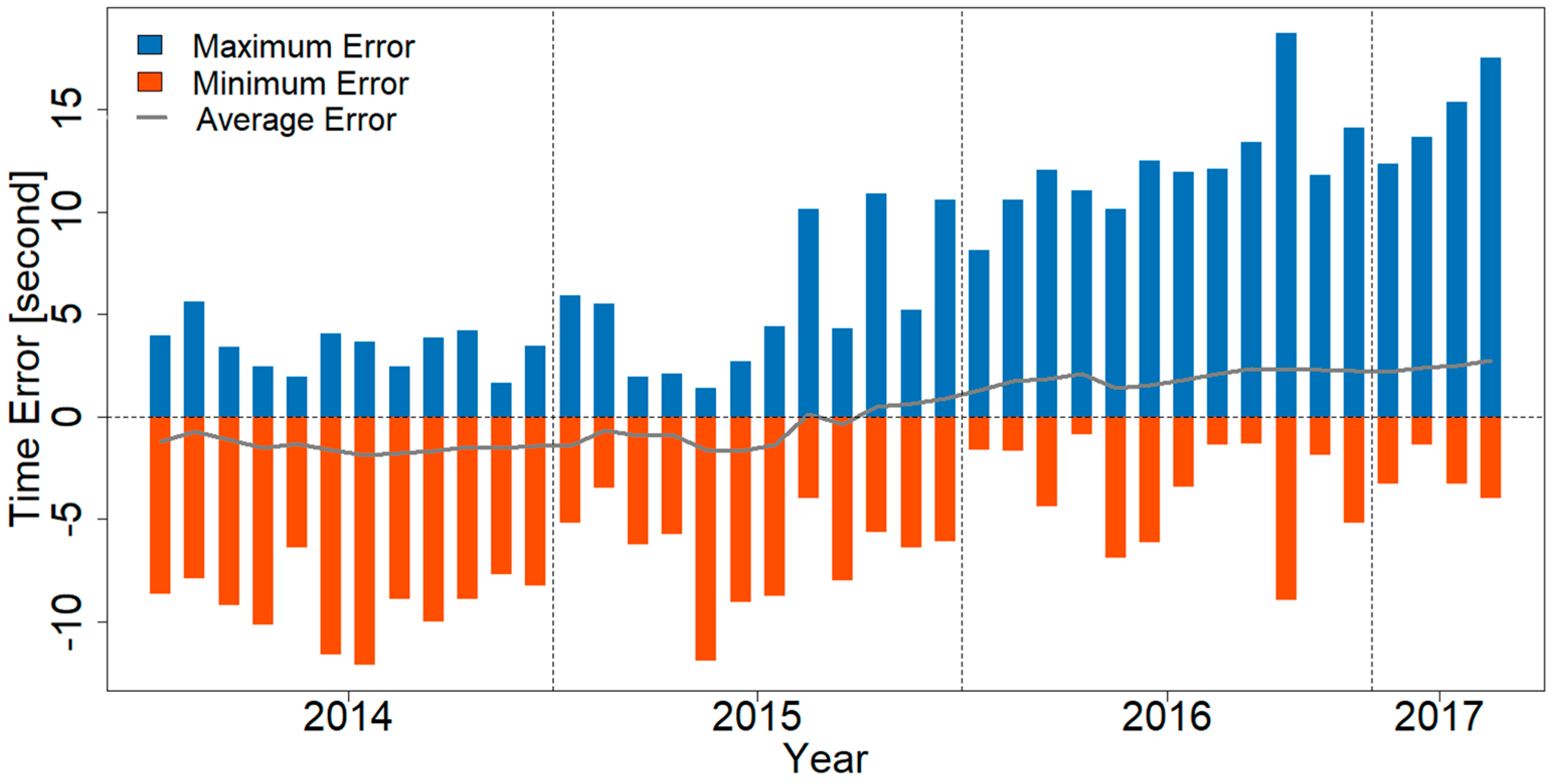
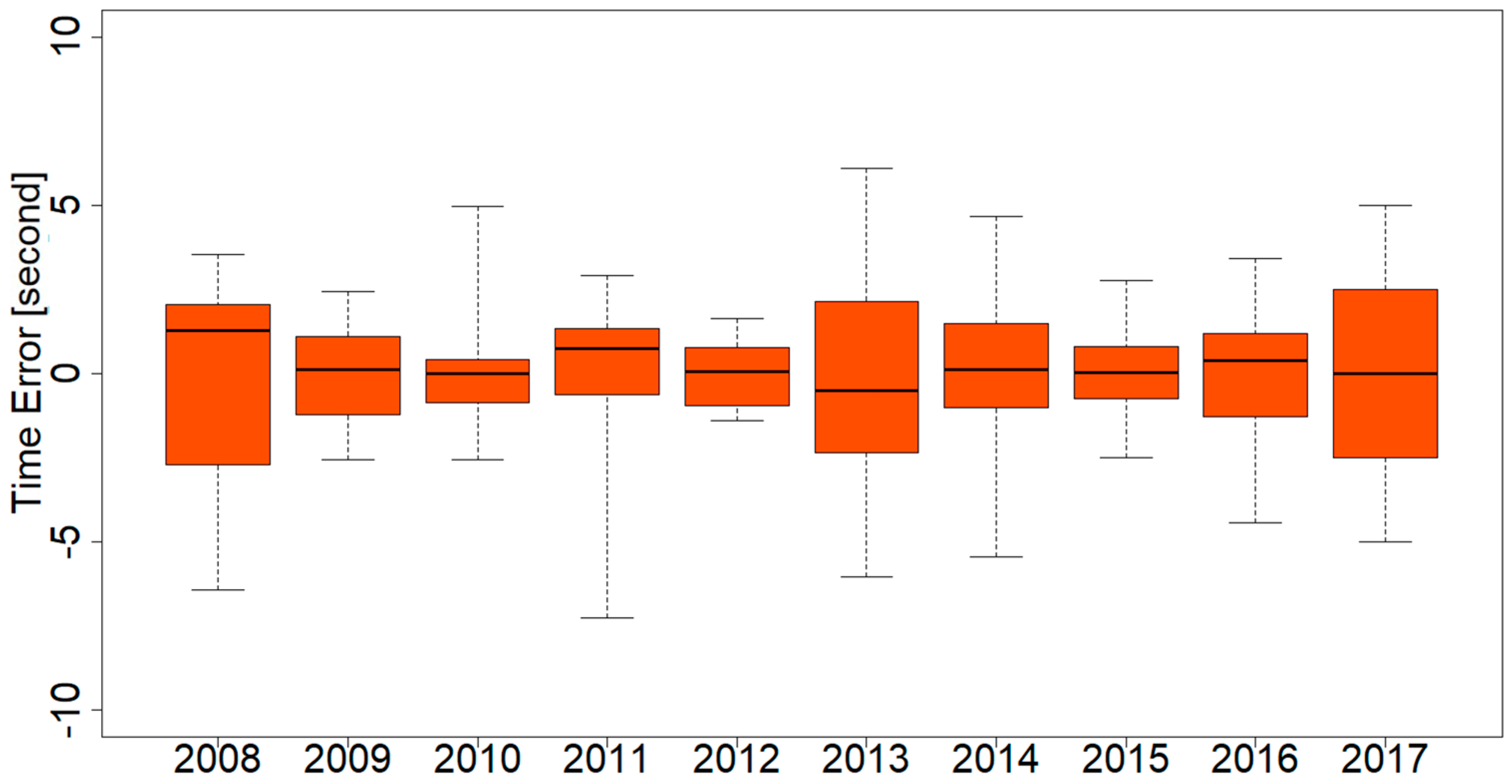
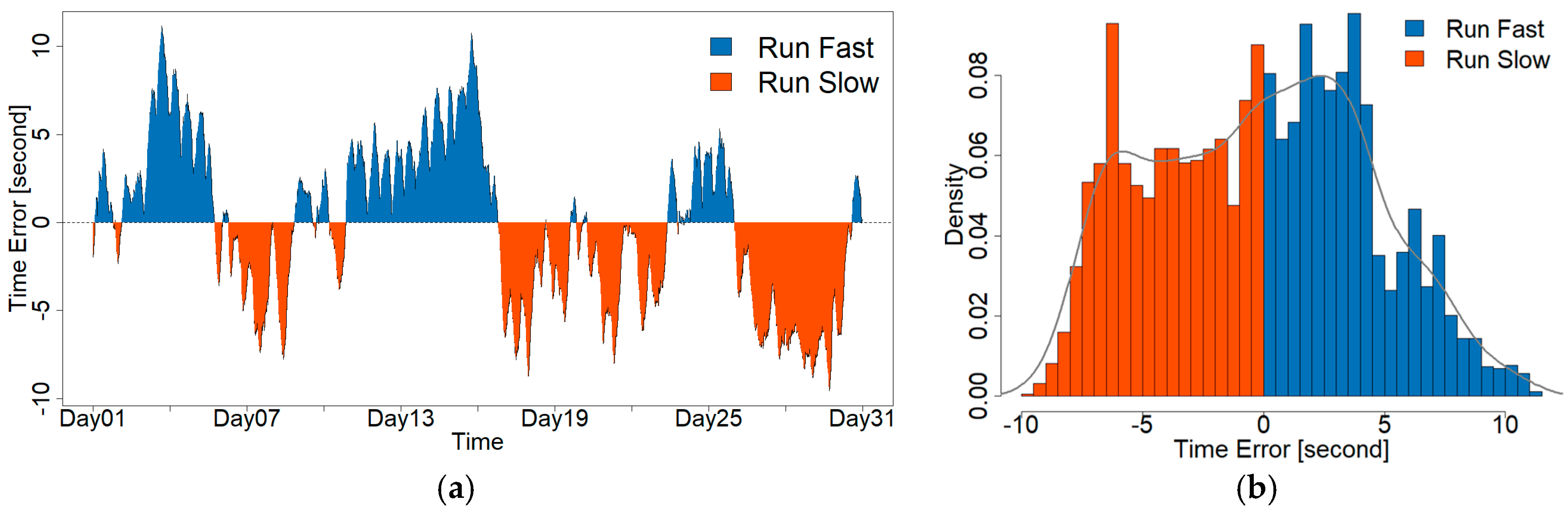
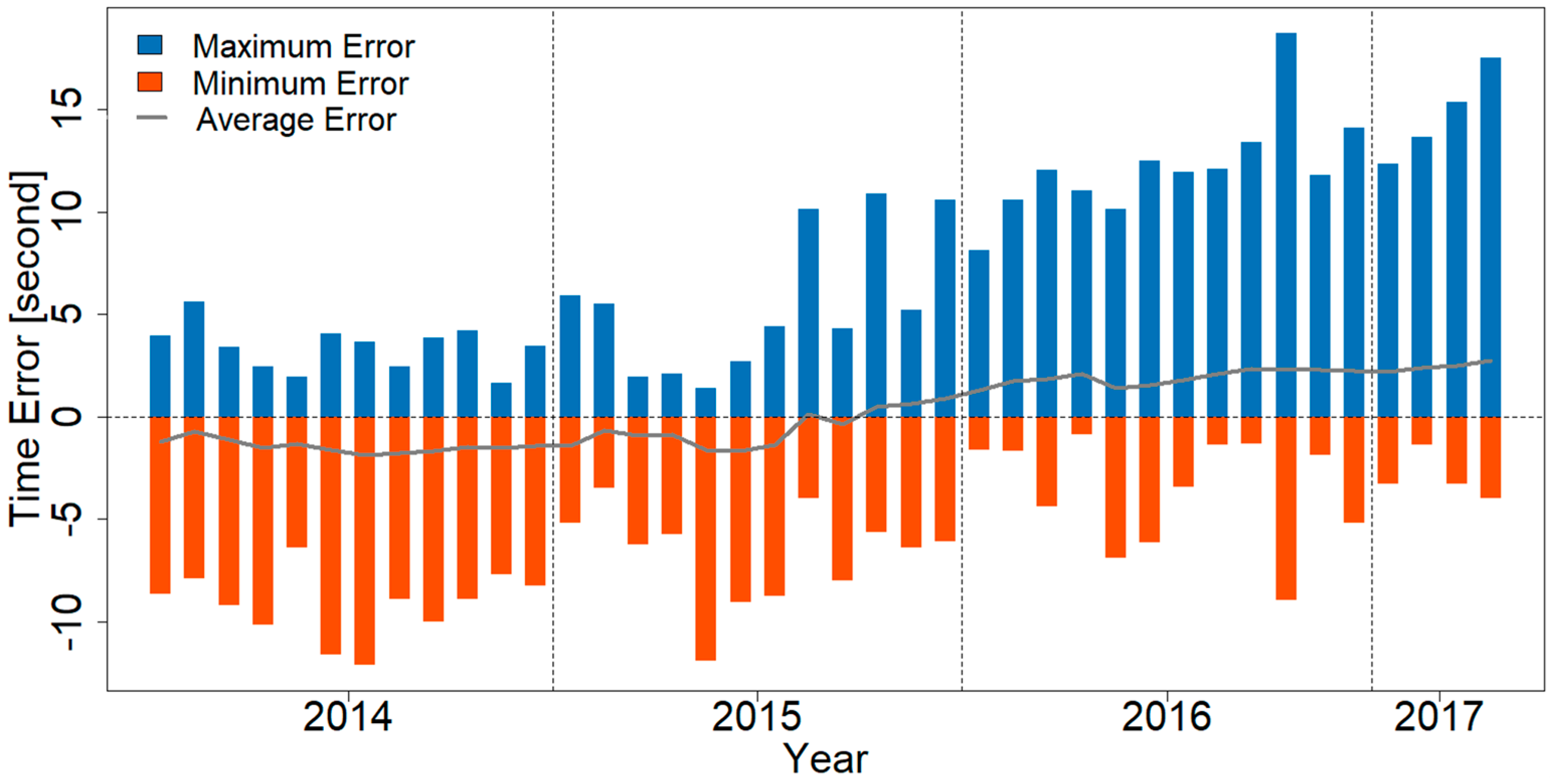
3.3. Time Error Tendency in Recent Years
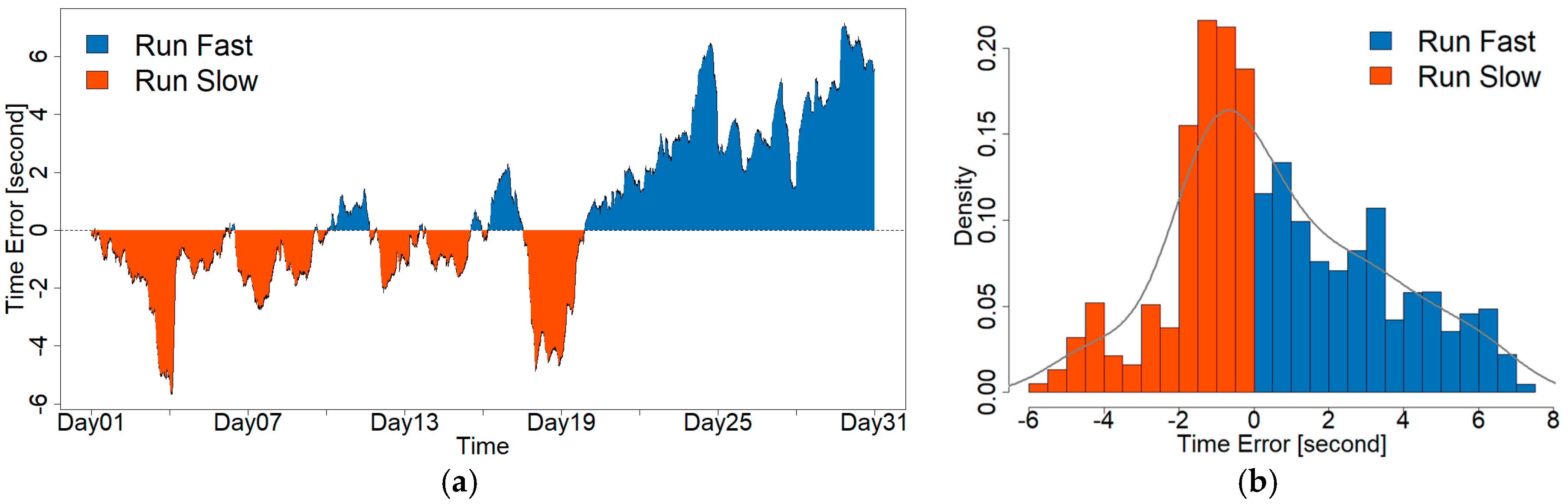
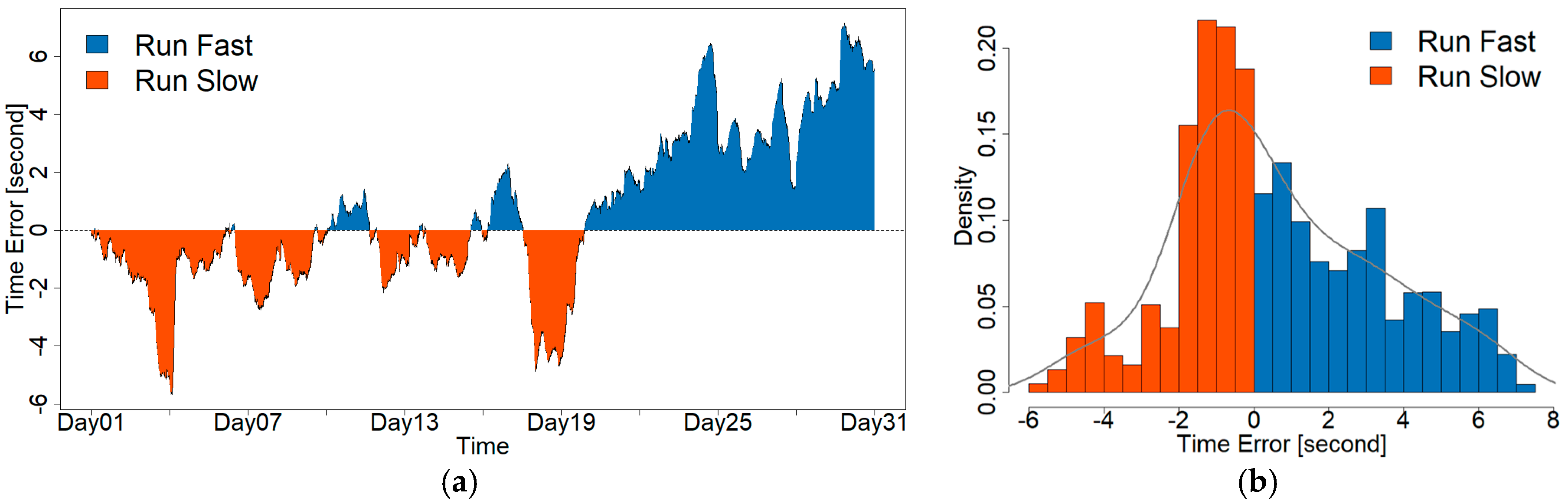
- Maximum Error (i.e., the maximum running fast time error over a specified period);
- Minimum Error (i.e., the maximum running slow time error over a specified period);
- Average Error (i.e., the average time error over a specified period).
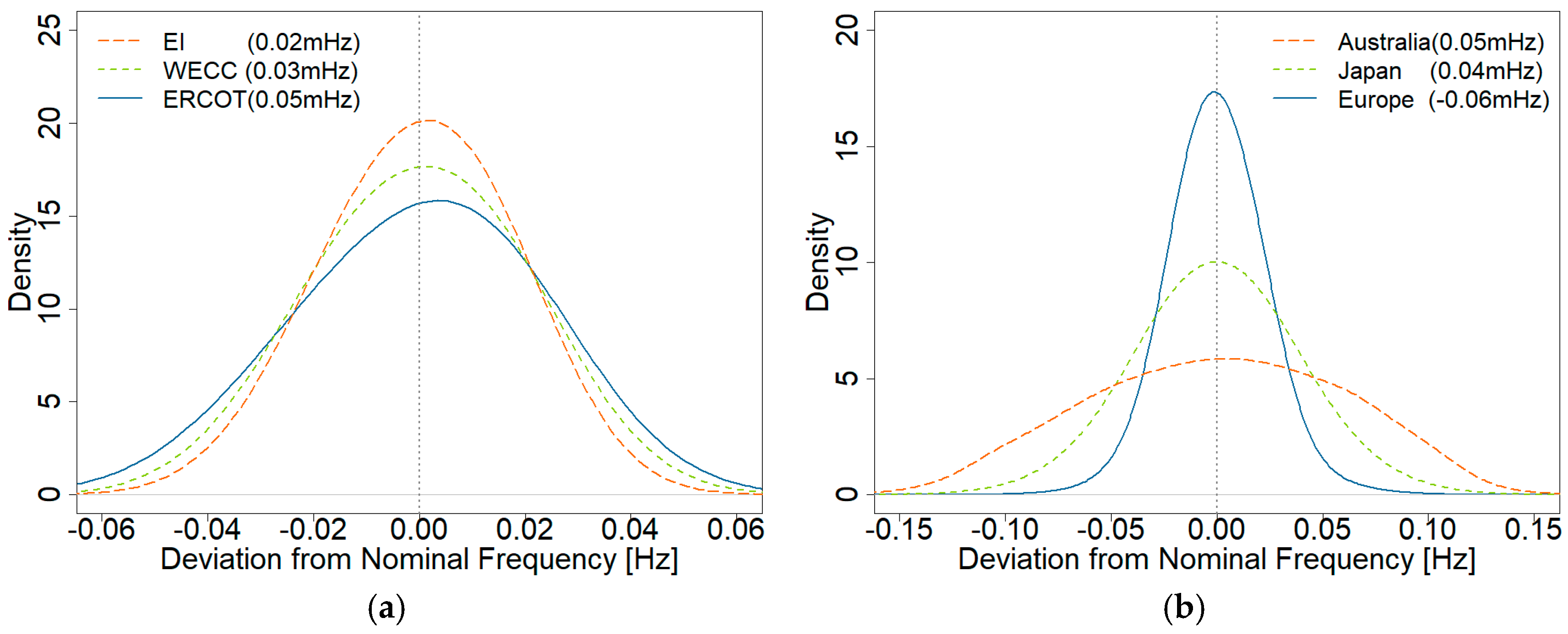
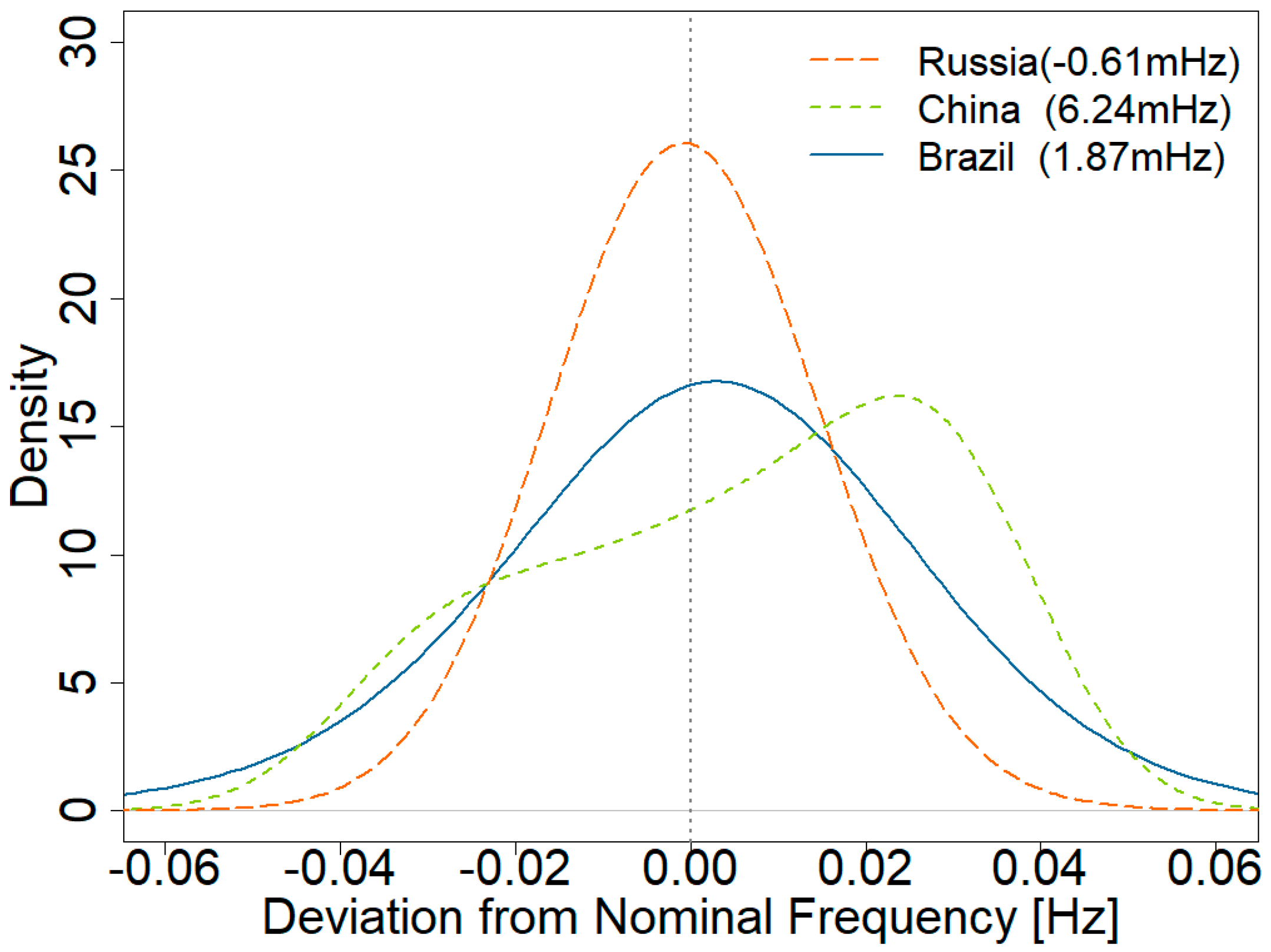
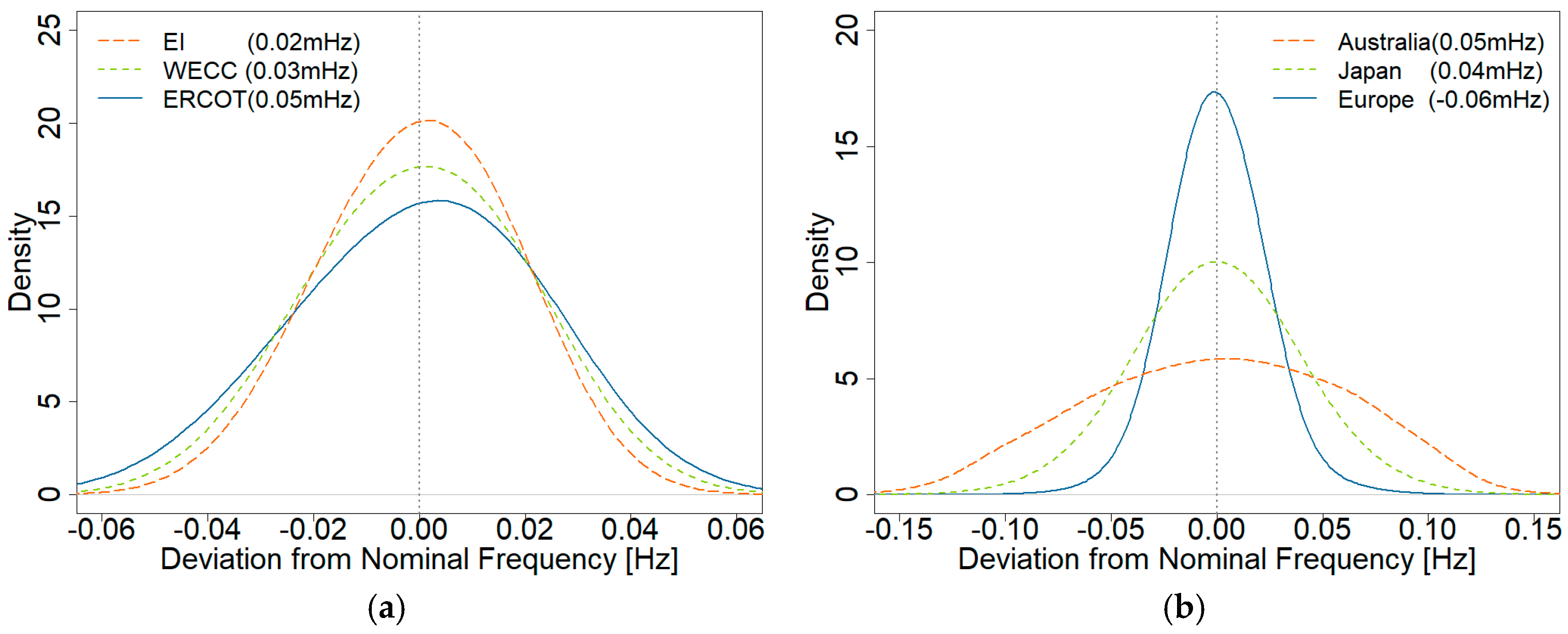
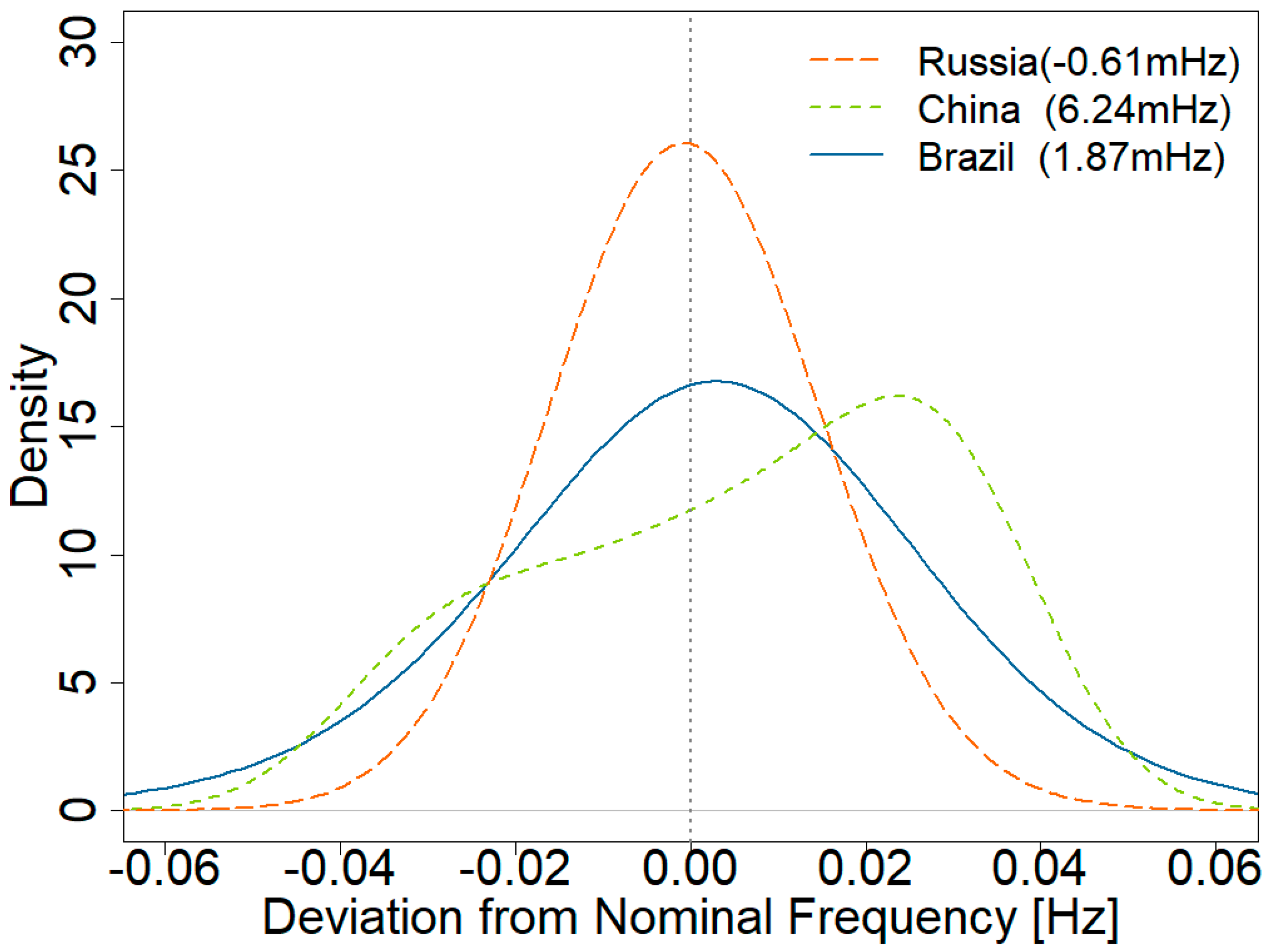
3.4. Time Error Analysis around the World
4. Time Error Correction Practice around the World
4.1. Time Error Corretion Provided by Untilities
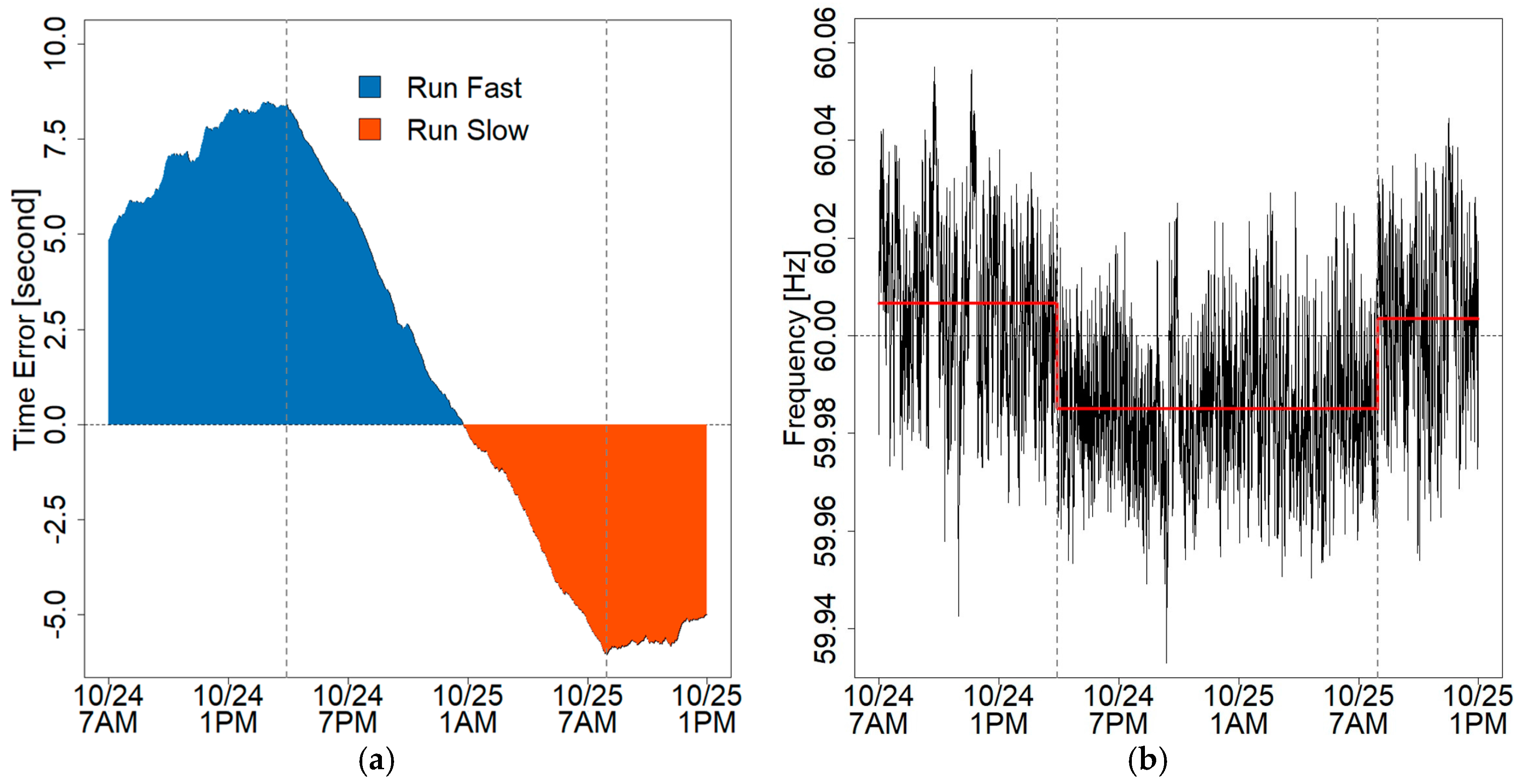
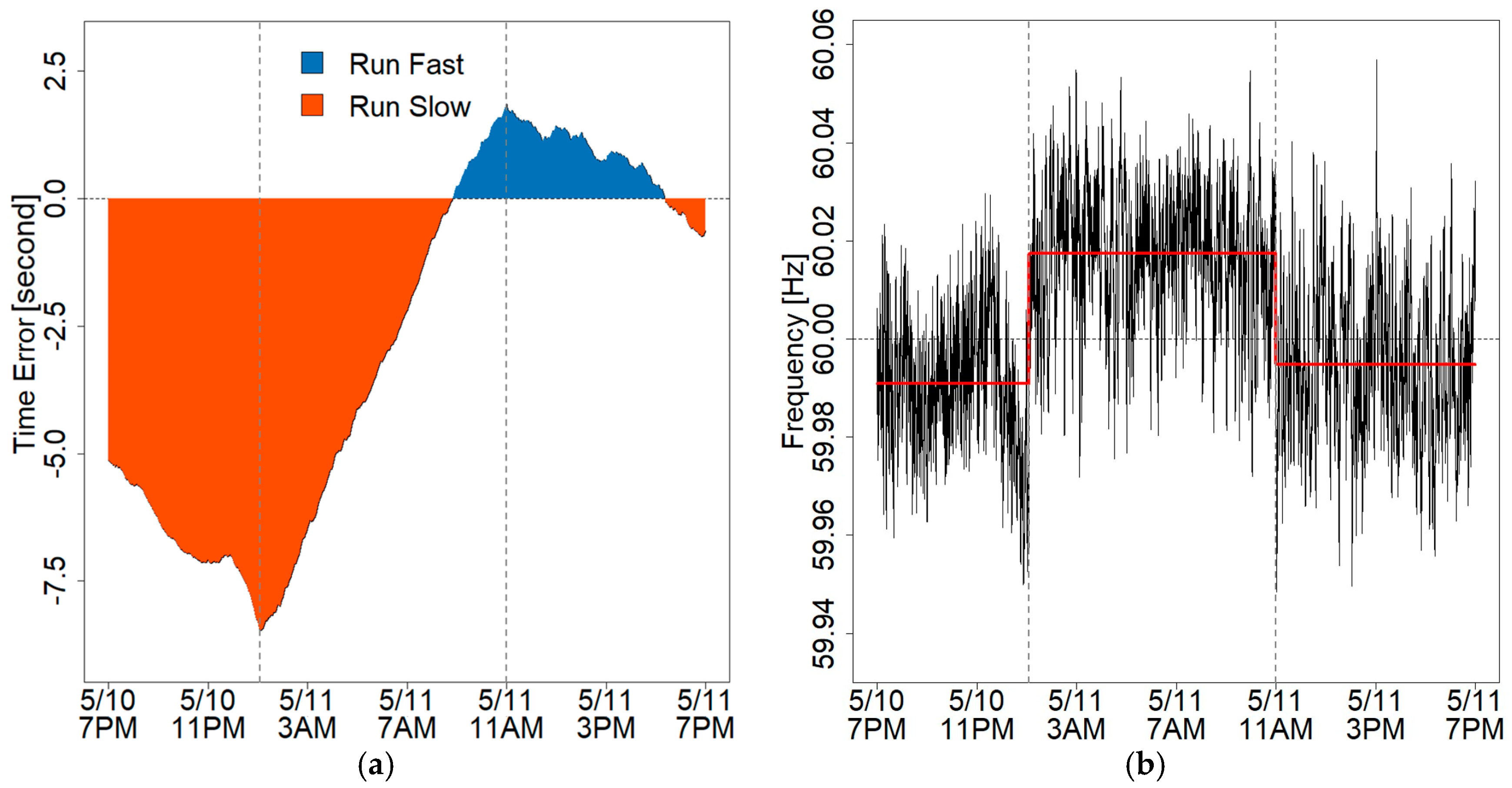
4.1.1. Fast Time Error Correction
4.1.2. Slow Time Error Correction
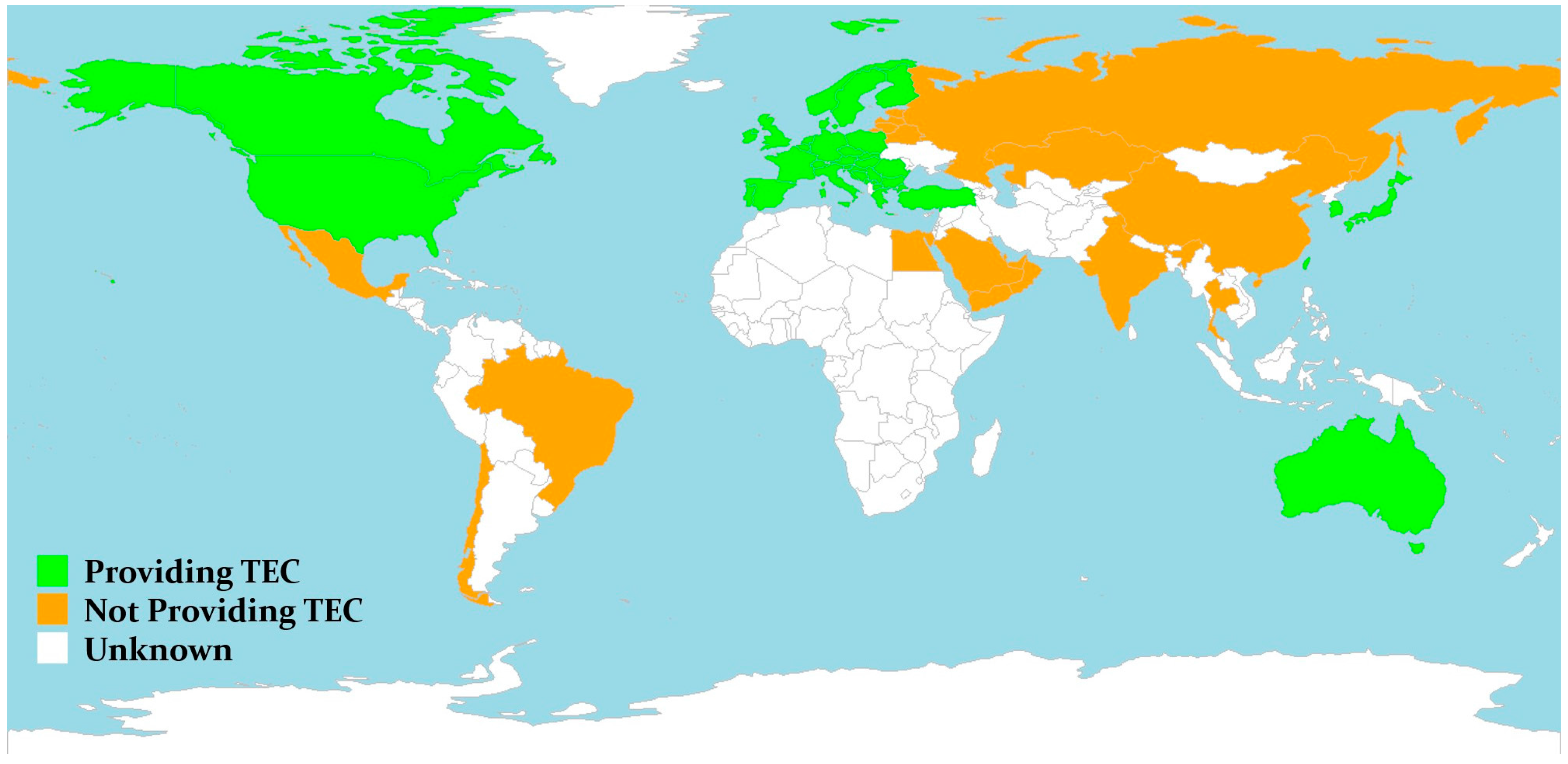
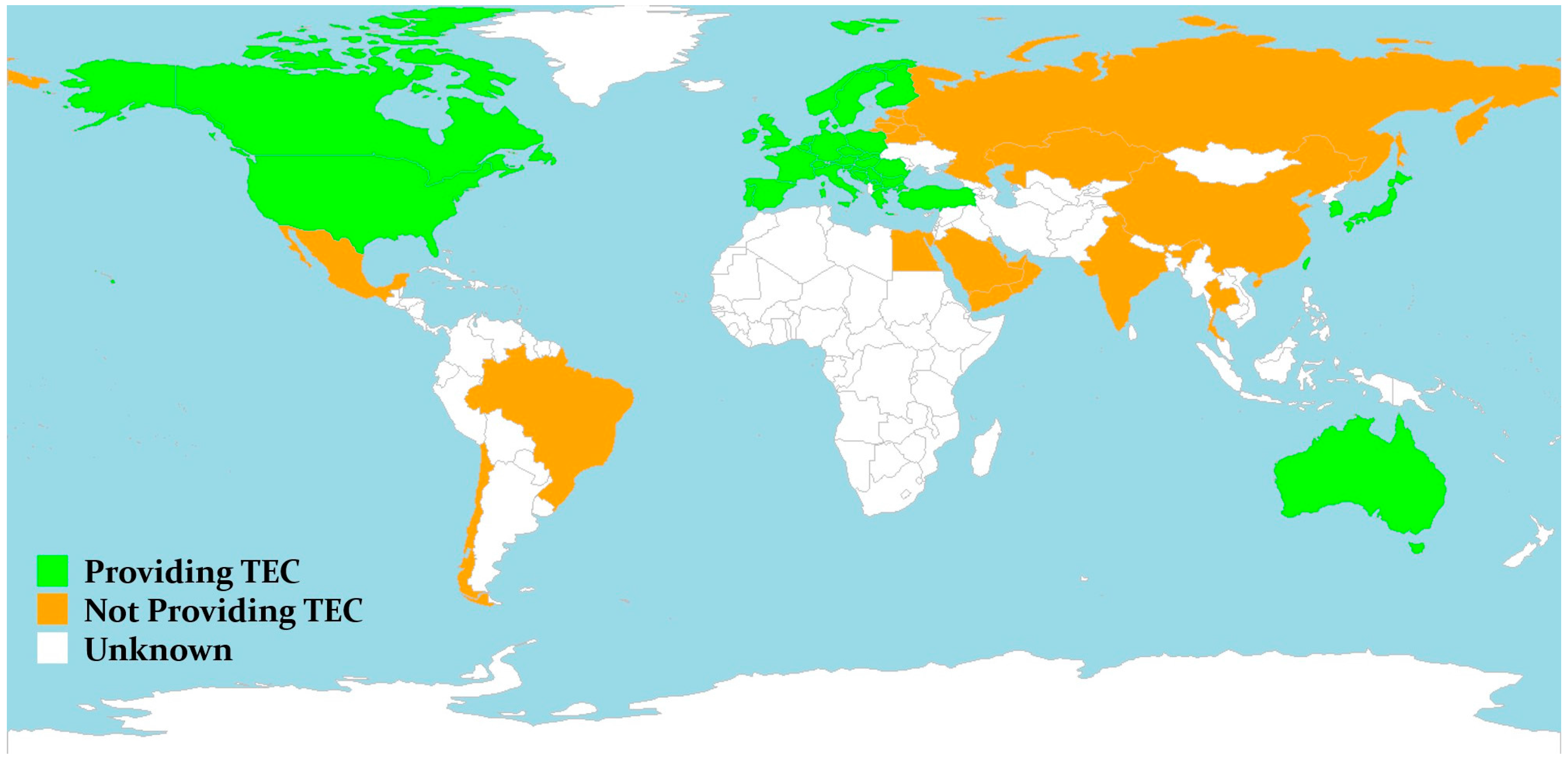
4.2. Worldwide Practices on Time Error Correction
5. Power System Frequency Distribution Pattern Analysis
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Welch, K.F. The History of Clocks and Watches; Drake Publishers: Cardiff, UK, 1972. [Google Scholar]
- Wise, S.J. Electric Clocks: Principles, Construction, Operation, Installation and Repair of Mains and Battery-Operated Clocks, 2nd ed.; Heywood: London, UK, 1951. [Google Scholar]
- Thomson, A. The first electric clock. In Gold Bulletin; Springer: Berlin, Germany, 1972; Volume 5, pp. 65–66. [Google Scholar]
- Lines, M.A. Ferranti Synchronous Electric Clocks; Electric Clocks: London, UK, 2012. [Google Scholar]
- Hardis, J.E.; Fonville, B.; Matsakis, D. Time and frequency from electrical power lines. In Proceedings of the 48th Annual Precise Time and Time Interval Systems and Applications Meeting, Monterey, CA, USA, 30–31 January 2017; pp. 372–386. [Google Scholar]
- Abdulraheem, B.S.; Gan, C.K. Power system frequency stability and control: Survey. Int. J. Appl. Eng. Res. 2016, 11, 5688–5695. [Google Scholar]
- RG-CE System Protection & Dynamics Sub Group. Frequency Stability Evaluation Criteria for the Synchronous Zone of Continental Europe; ENTSO-E: Brussels, Belgium, 2016. [Google Scholar]
- Amjady, N.; Fallahi, F. Determination of frequency stability border of power system to set the thresholds of under frequency load shedding relays. Energy Convers. Manag. 2010, 51, 1864–1872. [Google Scholar] [CrossRef]
- Delassi, A.; Arif, S.; Mokrani, L. Frequency stability enhancement in power system using high-order sliding mode control. In Proceedings of the 4th International Conference on Electrical Engineering (ICEE), Boumerdes, Algeria, 13–15 December 2015; pp. 1–4. [Google Scholar]
- Kiaee, M.; Cruden, A.; Infield, D.; Chladek, P. Improvement of power system frequency stability using alkaline electrolysis plants. Proc. Inst. Mech. Eng. Part A J. Power Energy 2013, 227, 115–123. [Google Scholar] [CrossRef]
- Abdlrahem, A.; Venayagamoorthy, G.K.; Corzine, K.A. Frequency stability and control of a power system with large PV plants using PMU information. In Proceedings of the North American Power Symposium (NAPS), Manhattan, KS, USA, 22–24 September 2013; pp. 1–6. [Google Scholar]
- Erlich, I.; Rensch, K.; Shewarega, F. Impact of large wind power generation on frequency stability. In Proceedings of the IEEE Power Engineering Society General Meeting, Montreal, QC, Canada, 18–22 June 2006; pp. 1–8. [Google Scholar]
- Wang, Z.; Wu, K.; Guo, L.; Liu, W.; Cui, W. Impact of wind speed disturbance on power system frequency stability. In Proceedings of the IEEE Innovative Smart Grid Technologies-Asia (ISGT Asia), Kuala Lumpur, Malaysia, 20–23 May 2014; pp. 349–353. [Google Scholar]
- Kundur, P.; Paserba, J.; Ajjarapu, V.; Andersson, G.; Bose, A.; Canizares, C.; Hatziargyriou, N.; Hill, D.; Stankovic, A.; Taylor, C. Definition and classification of power system stability. IEEE Trans. Power Syst. 2004, 19, 1387–1401. [Google Scholar]
- Zhong, Z.; Xu, C.; Billian, B.J.; Zhang, L.; Tsai, S.J.; Conners, R.W.; Centeno, V.A.; Phadke, A.G.; Liu, Y. Power system frequency monitoring network (FNET) implementation. IEEE Trans. Power Syst. 2005, 20, 1914–1921. [Google Scholar] [CrossRef]
- Zhang, Y.; Markham, P.; Xia, T.; Chen, L.; Ye, Y.; Wu, Z.; Yuan, Z.; Wang, L.; Bank, J.; Burgett, J. Wide-area frequency monitoring network (FNET) architecture and applications. IEEE Trans. Smart Grid 2010, 1, 159–167. [Google Scholar] [CrossRef]
- Liu, Y.; You, S.; Yao, W.; Cui, Y.; Wu, L.; Zhou, D.; Zhao, J.; Liu, H.; Liu, Y. A Distribution Level Wide Area Monitoring System for the Electric Power Grid–FNET/GridEye. IEEE Access 2017, 5, 2329–2338. [Google Scholar] [CrossRef]
- Xia, T.; Zhang, H.; Gardner, R.; Bank, J.; Dong, J.; Zuo, J.; Liu, Y.; Beard, L.; Hirsch, P.; Zhang, G. Wide-area frequency based event location estimation. In Proceedings of the IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; pp. 1–7. [Google Scholar]
- You, S.; Guo, J.; Kou, G.; Liu, Y.; Liu, Y. Oscillation mode identification based on wide-area ambient measurements using multivariate empirical mode decomposition. Electr. Power Syst. Res. 2016, 134, 158–166. [Google Scholar] [CrossRef]
- Liu, H.; Zhu, L.; Pan, Z.; Bai, F.; Liu, Y.; Liu, Y.; Patel, M.; Farantatos, E.; Bhatt, N. ARMAX-based transfer function model identification using wide-area measurement for adaptive and coordinated damping control. IEEE Trans. Smart Grid 2015, 8, 1105–1115. [Google Scholar] [CrossRef]
- Liu, Y.; Zhan, L.; Zhang, Y.; Markham, P.N.; Zhou, D.; Guo, J.; Lei, Y.; Kou, G.; Yao, W.; Chai, J. Wide-area-measurement system development at the distribution level: An FNET/GridEye example. IEEE Trans. Power Deliv. 2016, 31, 721–731. [Google Scholar] [CrossRef]
- Zhan, L.; Liu, Y.; Culliss, J.; Zhao, J.; Liu, Y. Dynamic single-phase synchronized phase and frequency estimation at the distribution level. IEEE Trans. Smart Grid 2015, 6, 2013–2022. [Google Scholar] [CrossRef]
- Yao, W.; Liu, Y.; Zhou, D.; Pan, Z.; Zhao, J.; Till, M.; Zhu, L.; Zhan, L.; Tang, Q.; Liu, Y. Impact of GPS signal loss and its mitigation in power system synchronized measurement devices. IEEE Trans. Smart Grid 2017. [Google Scholar] [CrossRef]
- Liu, Y.; Yao, W.; Zhou, D.; Wu, L.; You, S.; Liu, H.; Zhan, L.; Zhao, J.; Lu, H.; Gao, W. Recent developments of FNET/GridEye—A situational awareness tool for smart grid. CSEE J. Power Energy Syst. 2016, 2, 19–27. [Google Scholar] [CrossRef]
- Wiser, R.; Bolinger, M.; Heath, G.; Keyser, D.; Lantz, E.; Macknick, J.; Mai, T.; Millstein, D. Long-term implications of sustained wind power growth in the United States: Potential benefits and secondary impacts. Appl. Energy 2016, 179, 146–158. [Google Scholar] [CrossRef]
- U.S. Energy Information Administration (EIA). Electric Power Monthly; U.S. Department of Energy (DoE): Washington, DC, USA, 2017.
- Zhang, Y.; Wang, J.; Zeng, B.; Hu, Z. Chance-Constrained Two-Stage Unit Commitment under Uncertain Load and Wind Power Output Using Bilinear Benders Decomposition. IEEE Trans. Power Syst. 2017. [Google Scholar] [CrossRef]
- Operating Committee. Time Error Correction and Reliability White Paper; North American Electric Reliability Corporation (NERC): Atlanta, GA, USA, 2015; pp. 1–16. [Google Scholar]
- North American Energy Standards Board (NAESB). Time Error Correction Standard; North American Energy Standards Board (NAESB): Houston, TX, USA, 2007. [Google Scholar]
- Zhang, Y.; Wang, J. K-nearest neighbors and a kernel density estimator for GEFCom2014 probabilistic wind power forecasting. Int. J. Forecast. 2016, 32, 1074–1080. [Google Scholar] [CrossRef]
- Wand, M.P.; Jones, M.C. Kernel Smoothing; Taylor & Francis: New York, NY, USA, 1994. [Google Scholar]
- Markham, P.N.; Zhang, Y.; Guo, J.; Liu, Y.; Bilke, T.; Bertagnolli, D. Analysis of frequency extrema in the Eastern and Western Interconnections, 2010–2011. In Proceedings of the IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–8. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FDR | Location | Nominal Frequency |
|---|---|---|
| 1 | USA, Seattle | 60 Hz |
| 2 | USA, Matton | 60 Hz |
| 3 | Sweden, Stockholm | 50 Hz |
| 4 | USA, San Angelo | 60 Hz |
| 5 | Brazil, Itajubá | 60 Hz |
| 6 | Japan, Karuizawa | 60 Hz |
| 7 | UK, Sheffield | 50 Hz |
| 8 | Denmark, Aalborg | 50 Hz |
| 9 | China, Shanghai | 50 Hz |
| 10 | Australia, Brisbane | 50 Hz |
| 11 | India, Kanpur | 50 Hz |
| 12 | Latvia, Riga | 50 Hz |
| Location | Maximum Time Error (Run Fast, Seconds) | Minimum Time Error (Run Slow, Seconds) | Average Time Error (Seconds) |
|---|---|---|---|
| USA, Seattle | +11.14 | −09.58 | +00.16 |
| USA, Matton | +18.38 | −08.05 | +00.78 |
| Sweden, Stockholm | +20.52 | −12.11 | +02.97 |
| USA, San Angelo | +07.15 | −05.68 | +00.58 |
| Brazil, Itajubá | +80.39 | −00.00 | +43.02 |
| Japan, Karuizawa | +07.59 | −06.75 | +00.04 |
| UK, Sheffield | +16.72 | −16.10 | +03.34 |
| Denmark, Aalborg | +17.88 | −10.81 | +01.07 |
| China, Shanghai | +333.94 | −00.00 | +180.70 |
| Australia, Brisbane | +04.43 | −05.16 | +00.08 |
| India, Kanpur | +00.00 | −144.76 | −69.83 |
| Latvia, Riga | +02.17 | −35.85 | −17.37 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Yao, W.; You, S.; Yu, W.; Wu, L.; Cui, Y.; Liu, Y. Impacts of Power Grid Frequency Deviation on Time Error of Synchronous Electric Clock and Worldwide Power System Practices on Time Error Correction. Energies 2017, 10, 1283. https://doi.org/10.3390/en10091283
Zhang Y, Yao W, You S, Yu W, Wu L, Cui Y, Liu Y. Impacts of Power Grid Frequency Deviation on Time Error of Synchronous Electric Clock and Worldwide Power System Practices on Time Error Correction. Energies. 2017; 10(9):1283. https://doi.org/10.3390/en10091283
Chicago/Turabian StyleZhang, Yao, Wenxuan Yao, Shutang You, Wenpeng Yu, Ling Wu, Yi Cui, and Yilu Liu. 2017. "Impacts of Power Grid Frequency Deviation on Time Error of Synchronous Electric Clock and Worldwide Power System Practices on Time Error Correction" Energies 10, no. 9: 1283. https://doi.org/10.3390/en10091283