A Novel Algorithm for Optimal Operation of Hydrothermal Power Systems under Considering the Constraints in Transmission Networks

 , , and
, , and 
Abstract
:1. Introduction
- (i)
- Successfully improve the optimal solution search ability of ENCSA;
- (ii)
- Successfully formulate a hydrothermal power system scheduling problem considering all constraints in transmission power networks;
- (iii)
- Successfully deal with all constraints such that they can be satisfied completely thanks to the appropriate selection of decision variables.
2. Hydrothermal Optimal Power Flow Problem Formulation
2.1. Fuel Cost Objective
2.2. Hydrothermal System Constraints
2.3. Transmission Network Constraints
2.4. Control and Dependent Variables
3. The Proposed Algorithm for the Optimal Power Flow Problem of the Hydrothermal Power Systems
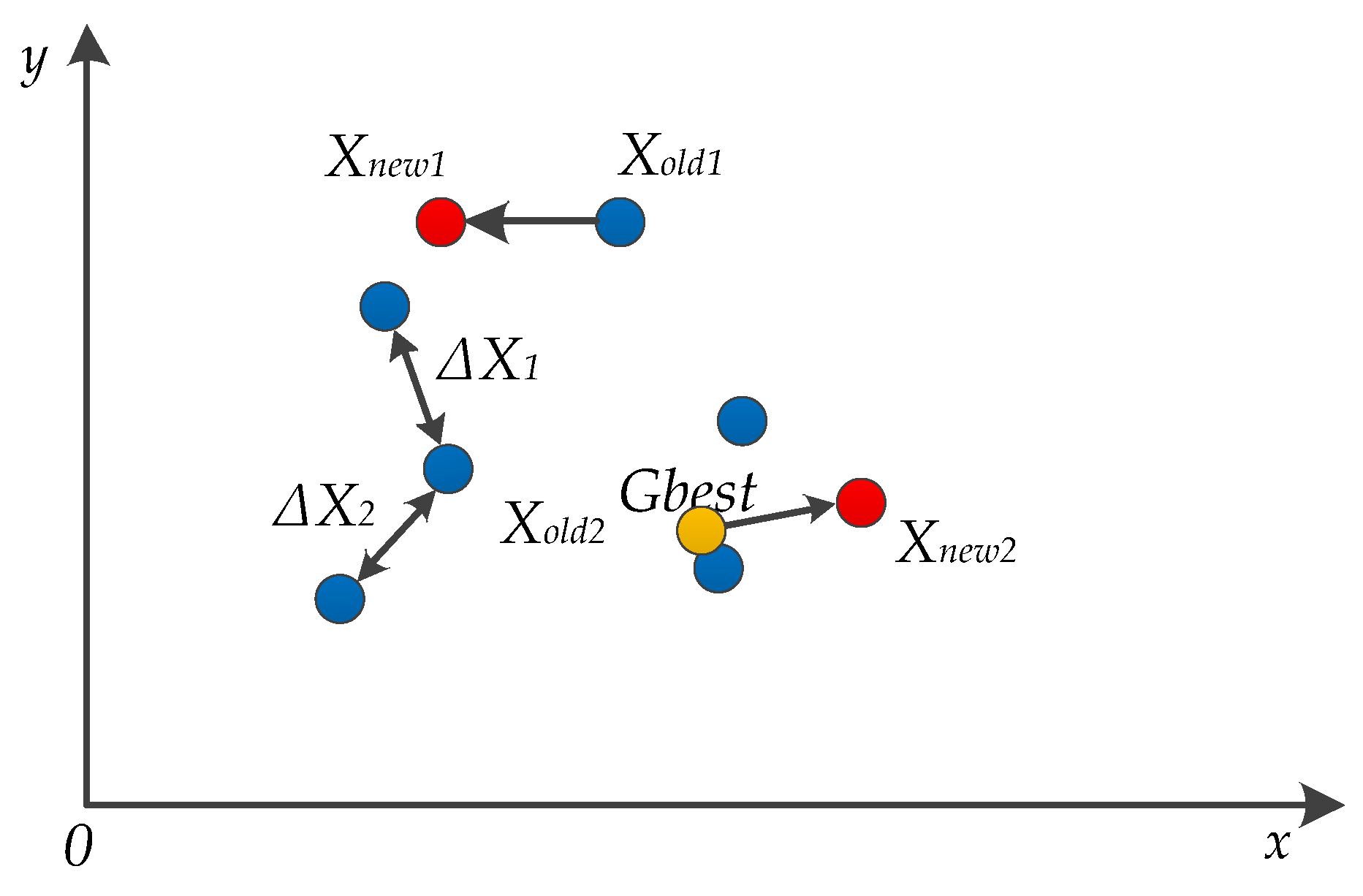
3.1. Conventional Cuckoo Search Algorithm
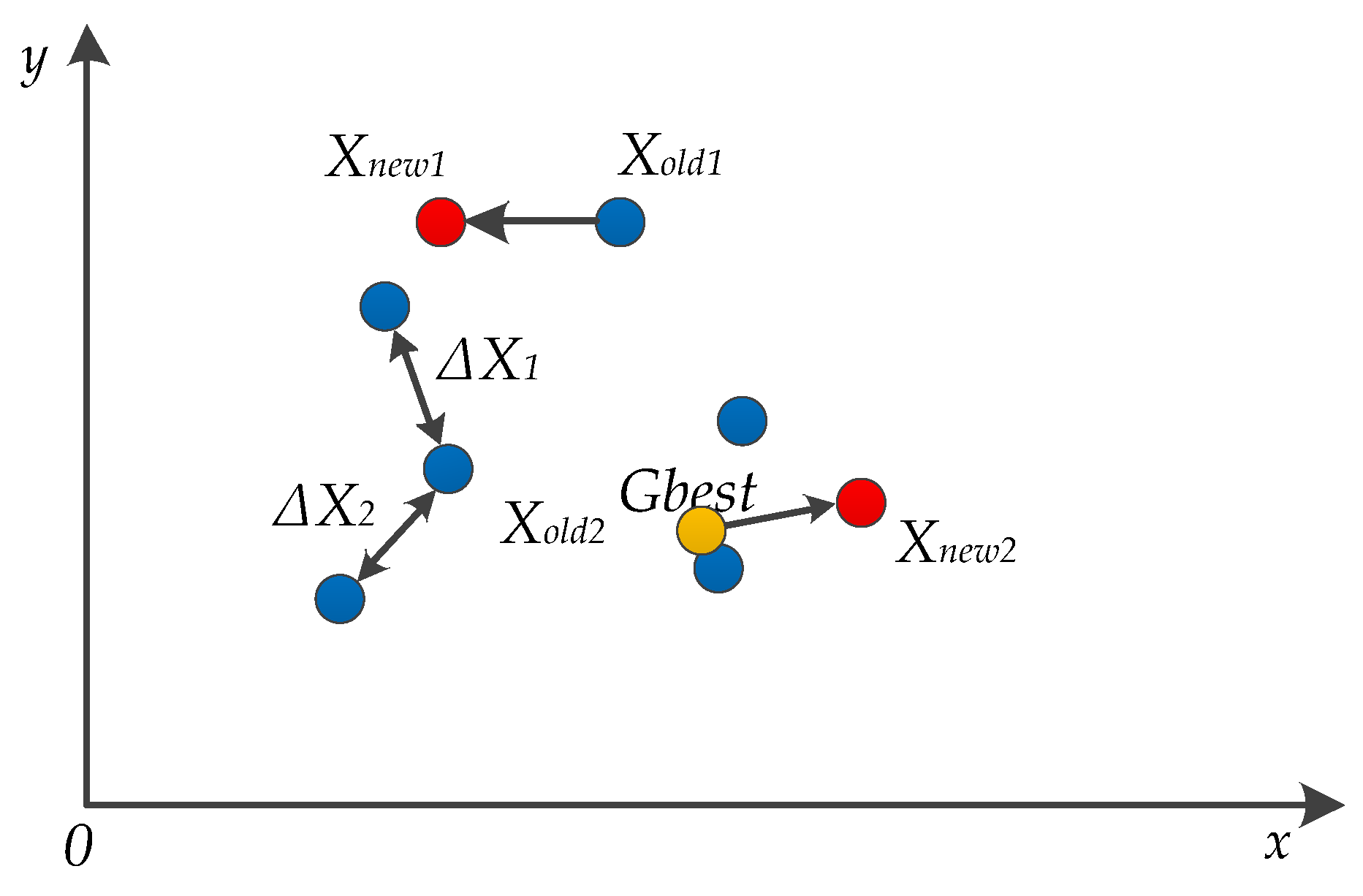
3.2. Proposed Cuckoo Search Algorithm
4. Application of the Proposed Method to Deal with the Optimal Power Flow Problems
4.1. Initialization
4.2. Calculate the Remaining Control Variables for the Last Subinterval M
4.3. Calculate Fitness Function
4.4. Handling New Solutions Violating Limitations
4.5. Termination Criteria
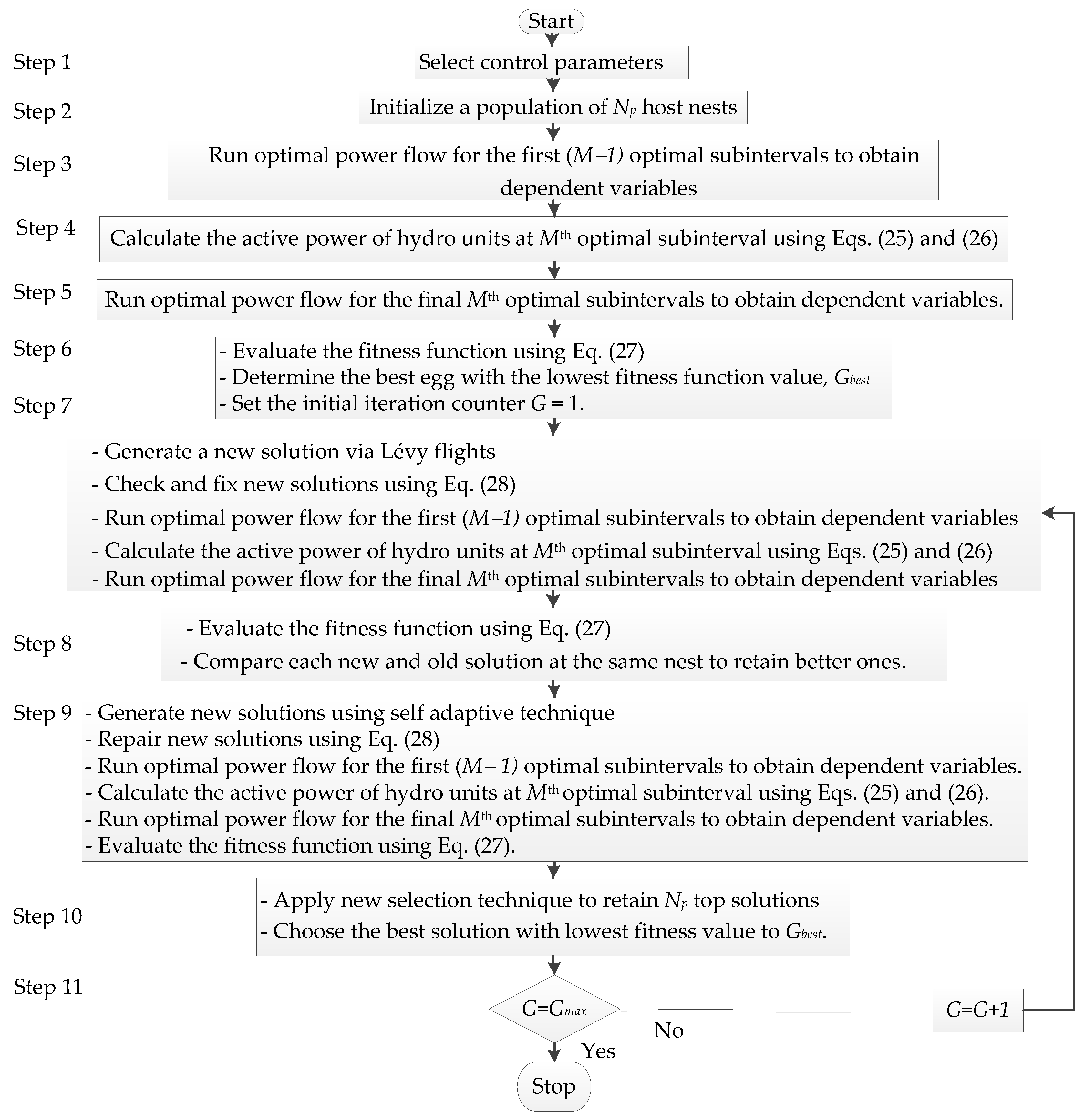
4.6. The Effective Novel Cuckoo Search Algorithm for the Considered Problem
5. Simulation Results
5.1. Selection of Control Parameters
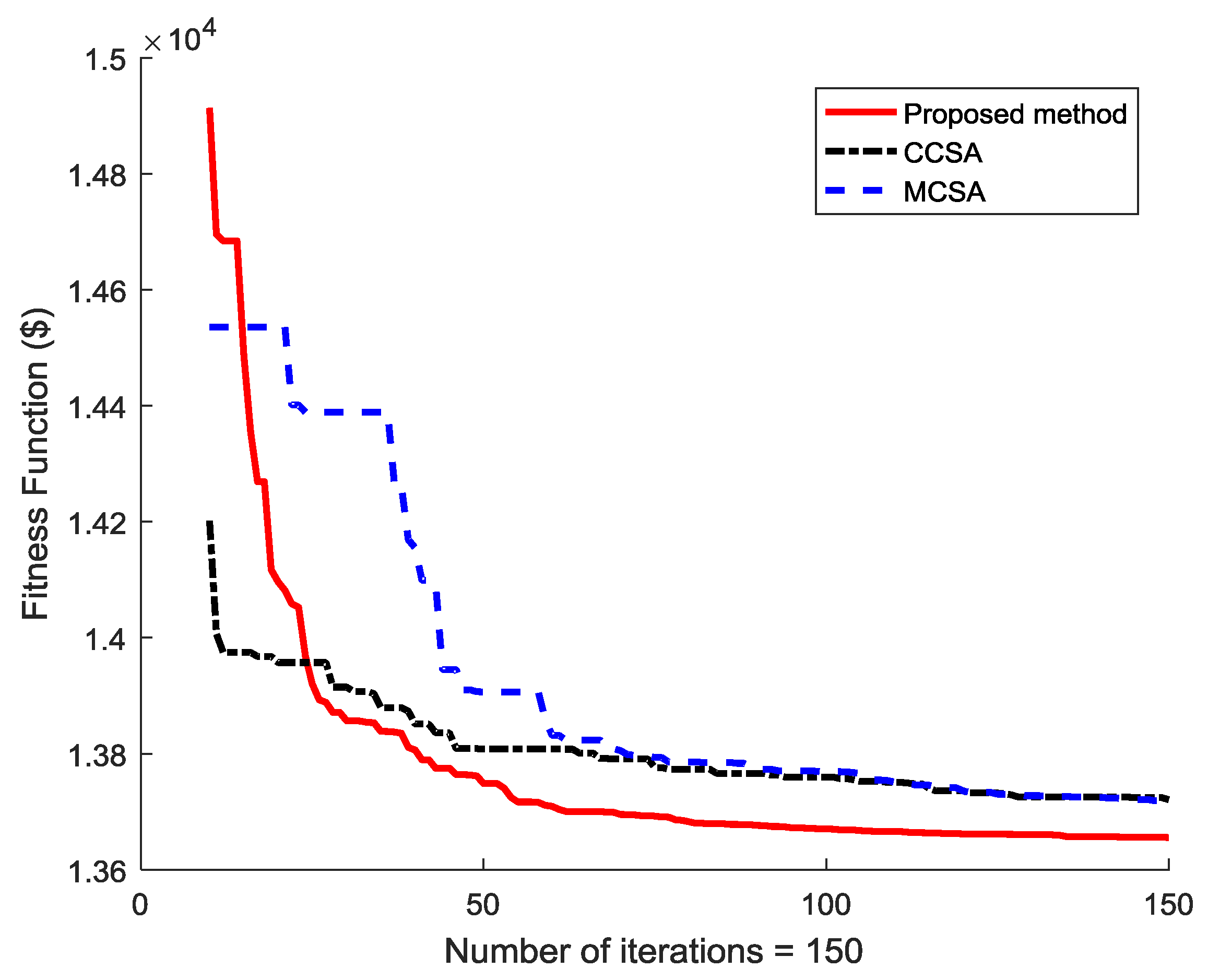
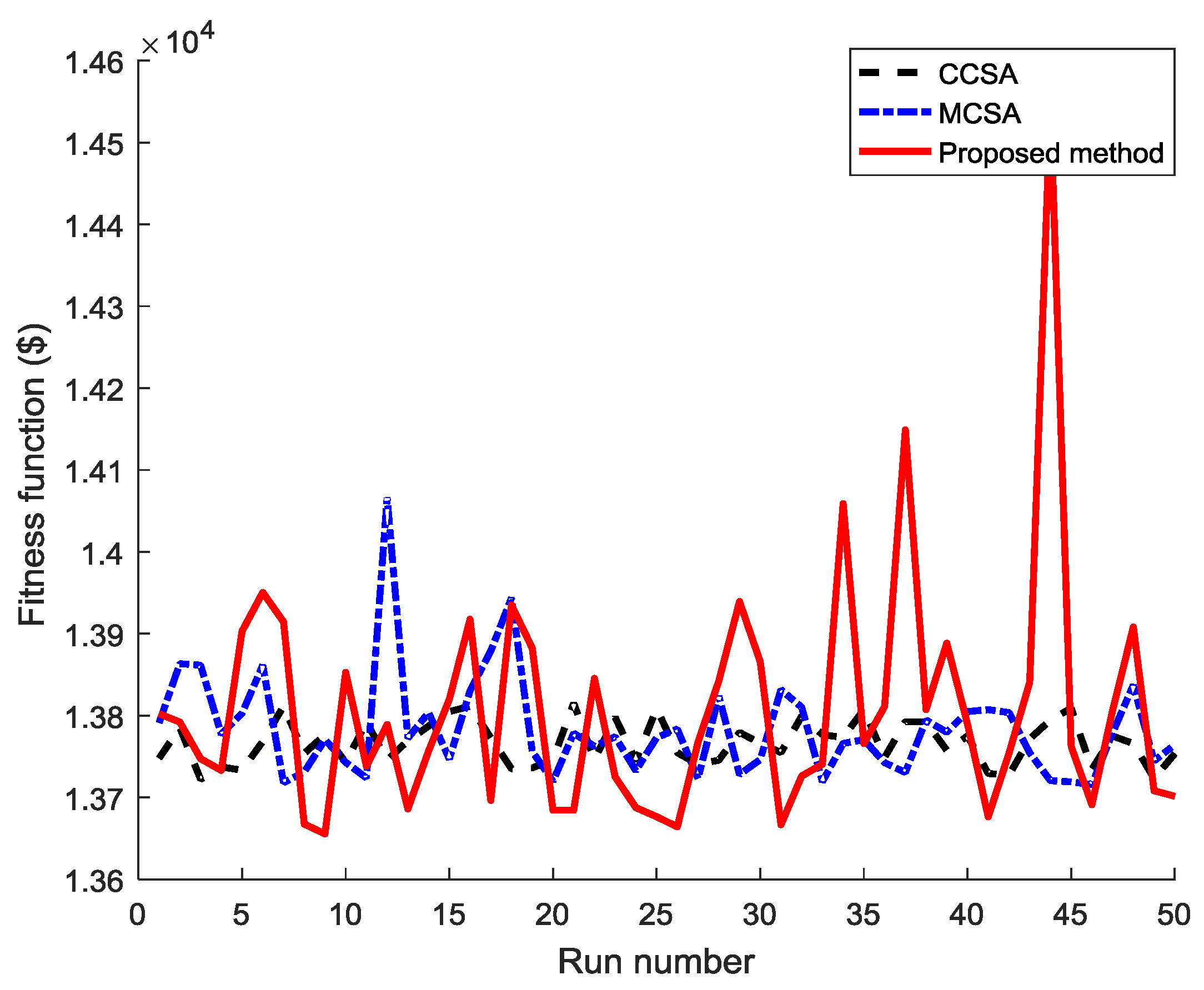
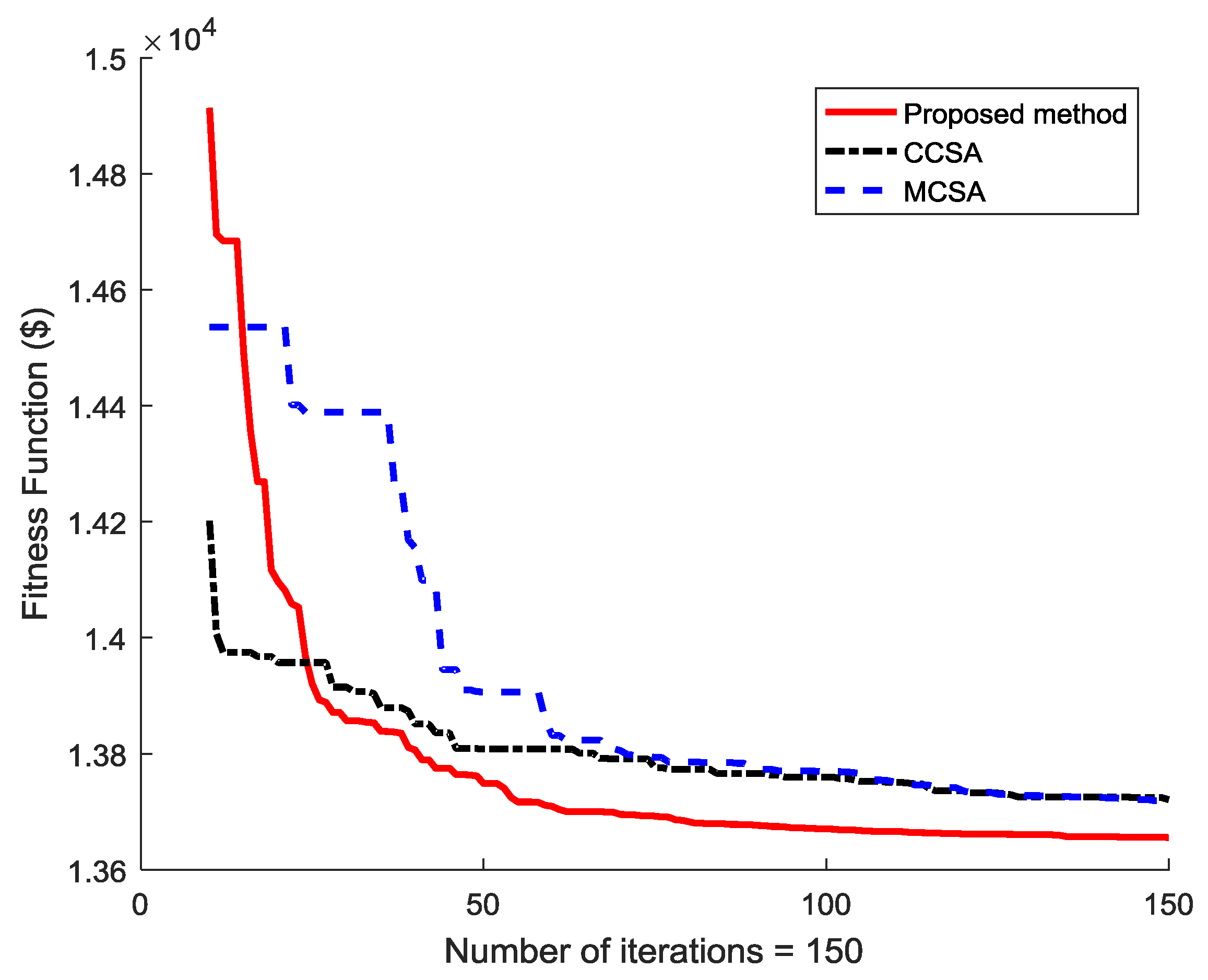
5.2. Results Obtained from the IEEE 30 Buses System
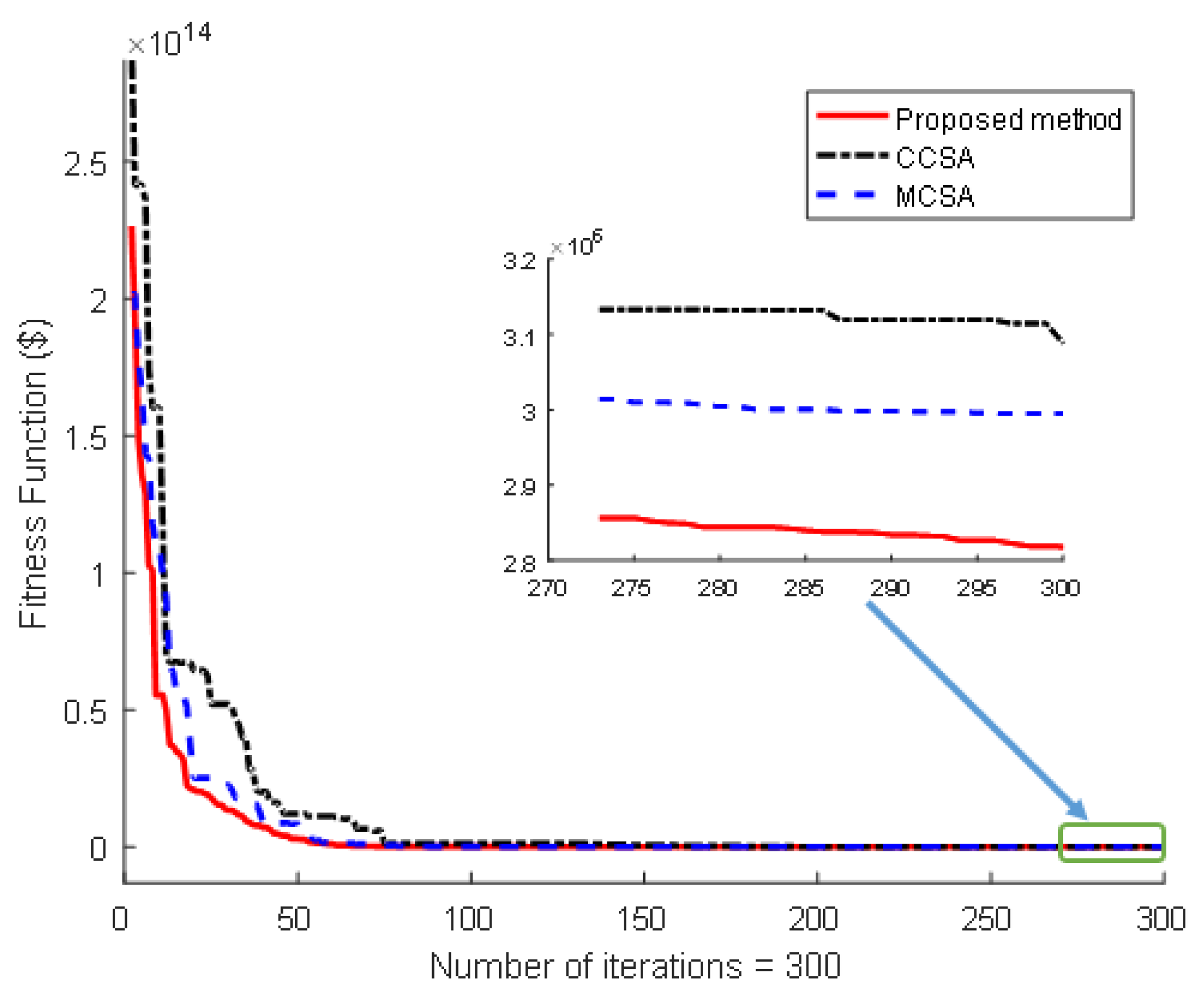
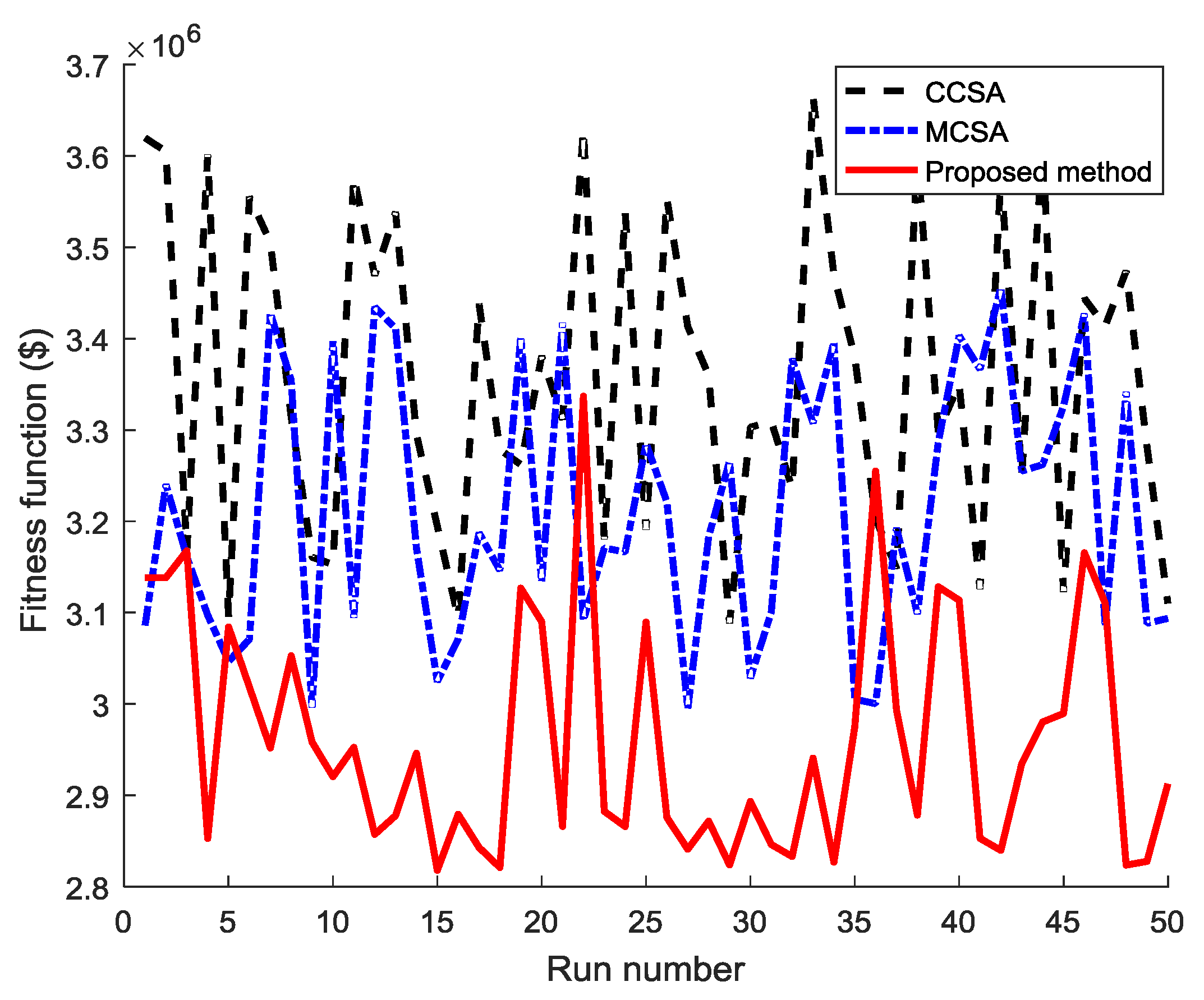
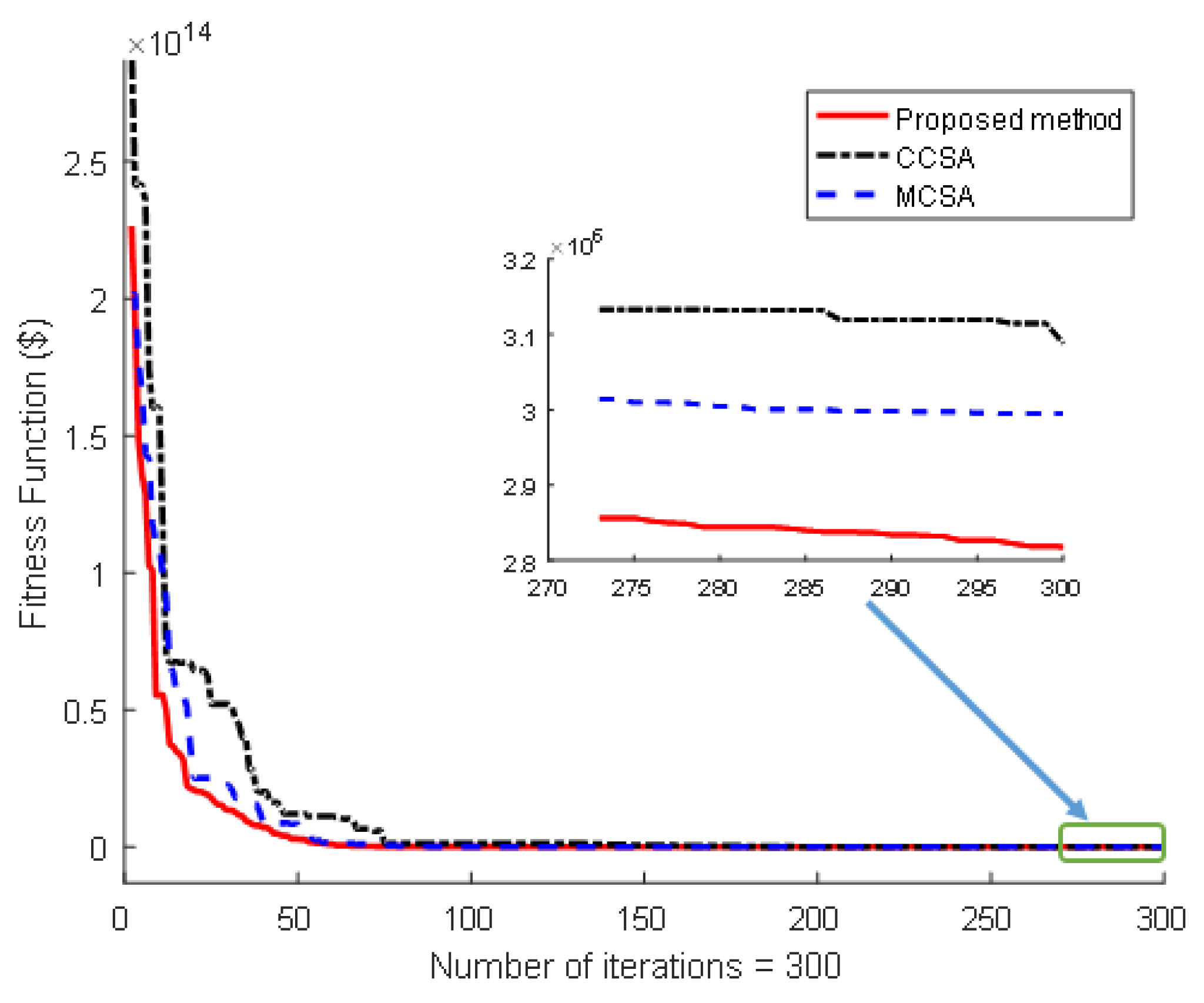
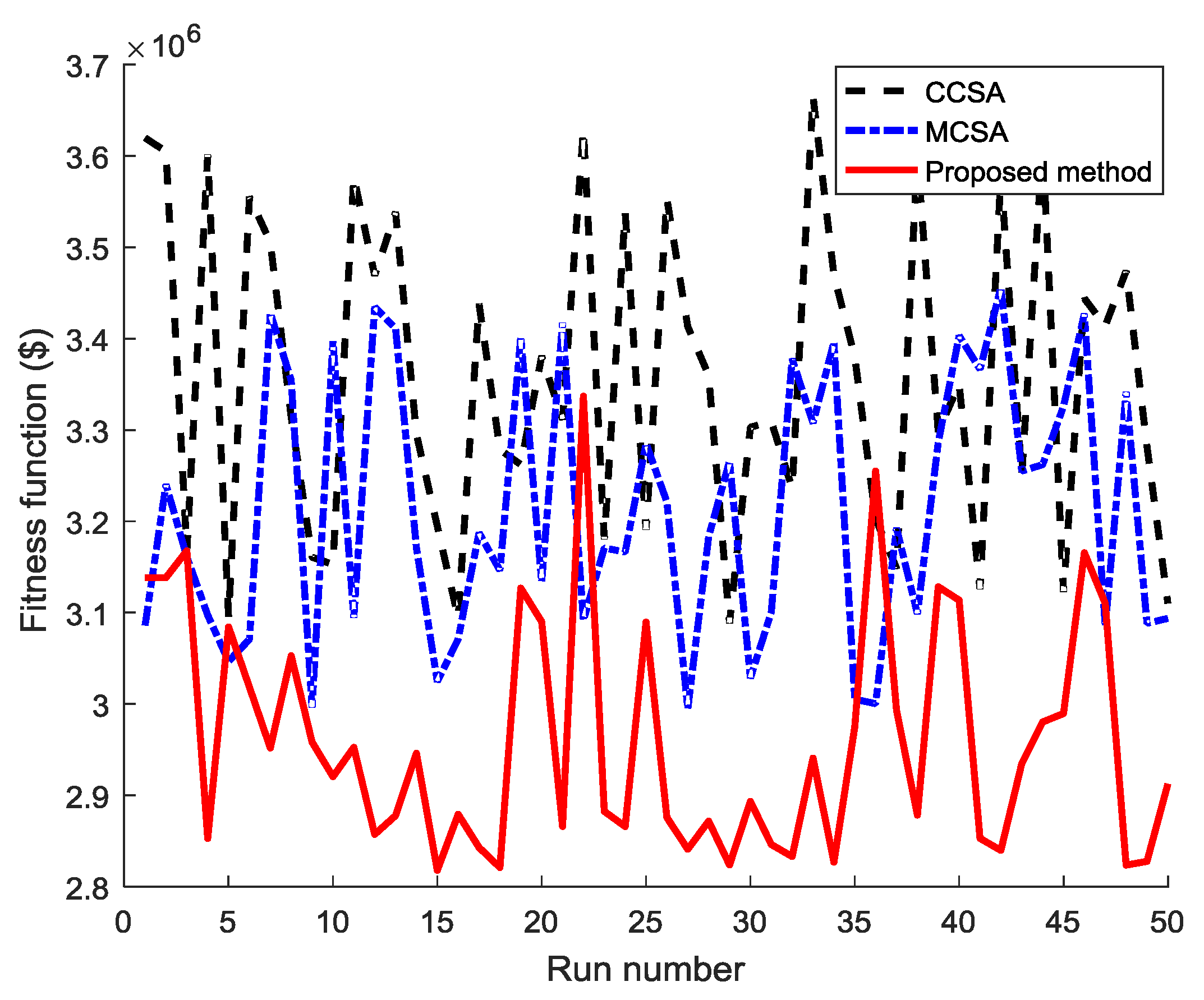
5.3. Obtained Results of the IEEE 118 Buses System
5.4. Discussion of ENCSA and Further Analysis of Results
6. Conclusions
Author Contributions
Conflicts of Interest
Nomenclature
| ai, bi, ci | Fuel cost coefficients of generating unit i |
| ahj, bhj, chj | Water discharge coefficients of hydro plant j |
| Phj,m | Power output of hydro plant j in subinterval m |
| Phj,max, Phj,min | Maximum and minimum power output of hydro plant j |
| Psi,m | Power output of thermal plant j in subinterval m |
| Psi,max, Psi,min | Maximum and minimum power output of thermal plant i |
| qj,m | Rate of water flow from hydro plant j in subinterval m |
| m, M | Index of subinterval and the number of subintervals |
| tm | Duration for subinterval m |
| Wj | Volume of water available for generation by hydro unit j |
| Gij, Bij | Transfer conductance and capacitance between bus i and bus j, respectively |
| Nb, Nc, Nd | Number of buses, switchable capacitor and load buses |
| Ng, Nl, Nt | Number of generating units, transmission lines and transformer with tap changing |
| N1 | Number of thermal generators |
| N2 | Number of hydro generators |
| Ng | Number of all generators including thermal and hydro units |
| Pdi, Qdi | Real and reactive power demands at bus i, respectively |
| Pgi, Qgi | Real and reactive power outputs of generating unit i, respectively |
| Qci | Reactive power compensation source at bus i |
| Sij, Sji | Apparent power flow from bus i to bus j and from bus j to bus i |
| Sl | Maximum apparent power flow in transmission line l |
| Tk | Tap-setting of transformer branch k |
| Vgi, Vli | Voltage magnitude at generation bus i and load bus i, respectively |
| Vi, di | Voltage magnitude and angle at bus i, respectively |
| Xr1, Xr2 | Two random solutions withdrawn from the population |
| randd | A random number generated for solution d |
| Pa | A fraction of alien eggs to be abandoned |
| Xd | A solution corresponding to nest d |
| Gbest | Global best nest |
| α0 | A positive scaling factor with value in the range [0, 1] |
| Xmin, Xmax | Minimum and maximum values of control variables |
| Fitnessd | The fitness function of solution d |
| Fitnessbest | Fitness function of the best solution |
| Tol | Predetermined tolerance |
| Dd | Fitness difference ratio between solution d and the best solution |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit No. | ai ($/h) | bi ($/MWh) | ci ($/MW2h) |
|---|---|---|---|
| 1 | 0 | 2.00 | 0.00375 |
| 2 | 0 | 1.75 | 0.01750 |
| 3 | 0 | 1.00 | 0.06250 |
| 4 | 0 | 3.25 | 0.00834 |
| Hydro Plant | ahj (MCF/h) | bhj (MCF/MWh) | chj (MCF /MW2h) | Wj (MCF) |
|---|---|---|---|---|
| 1 | 1.980 | 0.306 | 0.000216 | 200 |
| 2 | 0.936 | 0.612 | 0.000360 | 400 |
| Hydro Plant | Bus | ahj (MCF/h) | bhj (MCF/MWh) | chj (MCF/(MW)2h) | Wj (MCF) |
|---|---|---|---|---|---|
| 1 | 111 | 1.0836 | 0.2159 | 0.000232 | 400 |
| 2 | 112 | 0.36 | 0.07197 | 7.73 × 10−5 | 120 |
| 3 | 113 | 1.0836 | 0.2159 | 0.000232 | 400 |
| 4 | 116 | 0.36 | 0.07197 | 7.73 × 10−5 | 120 |
| Parameter | Value | |
|---|---|---|
| Subint. 1 | Subint. 2 | |
| Pg1 (MW) | 153.2844 | 149.3397 |
| Pg2 (MW) | 43.0415 | 42.0074 |
| Pg5 (MW) | 19.669 | 18.0139 |
| Pg8 (MW) | 10 | 10.0061 |
| Pg11 (MW) | 24.8623 | 16.0447 |
| Pg13 (MW) | 40 | 12 |
| Vg1 (pu) | 1.1 | 1.0857 |
| Vg2 (pu) | 1.0875 | 1.0657 |
| Vg5 (pu) | 1.0619 | 1.042 |
| Vg8 (pu) | 1.0679 | 1.051 |
| Vg11 (pu) | 1.0962 | 1.0688 |
| Vg13 (pu) | 1.0998 | 1.0902 |
| T11 (pu) | 1.02 | 1.04 |
| T12 (pu) | 1.04 | 0.92 |
| T15 (pu) | 1.08 | 1.04 |
| T36 (pu) | 0.99 | 1 |
| Qc10 (MVAr) | 18.9 | 6.3 |
| Qc24 (MVAr) | 4.3 | 4 |
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| Pg1 (MW) | 19.0598 | Pg100 (MW) | 235.4283 | Vg76 (PU) | 1.0018 |
| Pg4 (MW) | 55.7638 | Pg103 (MW) | 29.832 | Vg77 (PU) | 1.0186 |
| Pg6 (MW) | 0.5868 | Pg104 (MW) | 12.5777 | Vg80 (PU) | 1.0244 |
| Pg8 (MW) | 62.9104 | Pg105 (MW) | 0.8445 | Vg85 (PU) | 1.0879 |
| Pg10 (MW) | 385.1619 | Pg107 (MW) | 57.3857 | Vg87 (PU) | 1.0535 |
| Pg12 (MW) | 77.7162 | Pg110 (MW) | 6.0031 | Vg89 (PU) | 1.0854 |
| Pg15 (MW) | 10.2586 | Pg111 (MW) | 72.9236 | Vg90 (PU) | 0.9988 |
| Pg18 (MW) | 4.4213 | Pg112 (MW) | 68.6941 | Vg91 (PU) | 1.0322 |
| Pg19 (MW) | 9.2522 | Pg113 (MW) | 79.4957 | Vg92 (PU) | 1.0691 |
| Pg24 (MW) | 4.8536 | Pg116 (MW) | 61.6715 | Vg99 (PU) | 1.0311 |
| Pg25 (MW) | 186.0854 | Vg1 (PU) | 0.9717 | Vg100 (PU) | 1.0313 |
| Pg26 (MW) | 268.4305 | Vg4 (PU) | 1.0146 | Vg103 (PU) | 1.0283 |
| Pg27 (MW) | 22.7964 | Vg6 (PU) | 0.9955 | Vg104 (PU) | 0.9969 |
| Pg31 (MW) | 4.9791 | Vg8 (PU) | 1.0072 | Vg105 (PU) | 0.9941 |
| Pg32 (MW) | 23.0057 | Vg10 (PU) | 1.0498 | Vg107 (PU) | 1.0015 |
| Pg34 (MW) | 0.9164 | Vg12 (PU) | 0.9811 | Vg110 (PU) | 1.0588 |
| Pg36 (MW) | 4.7562 | Vg15 (PU) | 1.0167 | Vg111 (PU) | 1.0884 |
| Pg40 (MW) | 56.9505 | Vg18 (PU) | 1.0366 | Vg112 (PU) | 1.0684 |
| Pg42 (MW) | 20.769 | Vg19 (PU) | 1.0353 | Vg113 (PU) | 1.0202 |
| Pg46 (MW) | 16.9152 | Vg24 (PU) | 1.0402 | Vg116 (PU) | 1.0196 |
| Pg49 (MW) | 196.975 | Vg25 (PU) | 1.0208 | T8 (pu) | 0.98 |
| Pg54 (MW) | 0.0539 | Vg26 (PU) | 1.0601 | T32 (pu) | 0.9 |
| Pg55 (MW) | 9.424 | Vg27 (PU) | 0.9739 | T36 (pu) | 1 |
| Pg56 (MW) | 76.0762 | Vg31 (PU) | 1.007 | T51 (pu) | 0.92 |
| Pg59 (MW) | 133.4323 | Vg32 (PU) | 0.98 | T93 (pu) | 1 |
| Pg61 (MW) | 142.7216 | Vg34 (PU) | 1.0501 | T95 (pu) | 1.09 |
| Pg62 (MW) | 4.2606 | Vg36 (PU) | 1.0388 | T102 (pu) | 1.05 |
| Pg65 (MW) | 338.6671 | Vg40 (PU) | 1.0447 | T107 (pu) | 1.02 |
| Pg66 (MW) | 332.8104 | Vg42 (PU) | 1.0837 | T127 (pu) | 0.97 |
| Pg69 (MW) | 434.6983 | Vg46 (PU) | 1.0036 | Qc5 (MVAr) | −33.3 |
| Pg70 (MW) | 1.1097 | Vg49 (PU) | 1.018 | Qc34 (MVAr) | 3.4 |
| Pg72 (MW) | 0.1819 | Vg54 (PU) | 1.0582 | Qc37 (MVAr) | −18.5 |
| Pg73 (MW) | 0.3883 | Vg55 (PU) | 1.0561 | Qc44 (MVAr) | 7 |
| Pg74 (MW) | 21.8734 | Vg56 (PU) | 1.0555 | Qc45 (MVAr) | 4.2 |
| Pg76 (MW) | 2.0134 | Vg59 (PU) | 1.0069 | Qc46 (MVAr) | 3.7 |
| Pg77 (MW) | 61.773 | Vg61 (PU) | 1.0225 | Qc48 (MVAr) | 1.9 |
| Pg80 (MW) | 406.4545 | Vg62 (PU) | 1.0384 | Qc74 (MVAr) | 0.7 |
| Pg85 (MW) | 22.9793 | Vg65 (PU) | 1.0196 | Qc79 (MVAr) | 18.5 |
| Pg87 (MW) | 4.1302 | Vg66 (PU) | 0.9934 | Qc82 (MVAr) | 0 |
| Pg89 (MW) | 164.3211 | Vg69 (PU) | 0.994 | Qc83 (MVAr) | 0.2 |
| Pg90 (MW) | 47.9289 | Vg70 (PU) | 1.0475 | Qc105 (MVAr) | 20 |
| Pg91 (MW) | 27.7547 | Vg72 (PU) | 1.0438 | Qc107 (MVAr) | 1.7 |
| Pg92 (MW) | 32.9663 | Vg73 (PU) | 1.0643 | Qc110 (MVAr) | 1 |
| Pg99 (MW) | 15.4033 | Vg74 (PU) | 1.0157 | - | |
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| Pg1 (MW) | 8.5778 | Pg100 (MW) | 164.7772 | Vg76 (PU) | 1.0114 |
| Pg4 (MW) | 5.5039 | Pg103 (MW) | 24.7425 | Vg77 (PU) | 0.9729 |
| Pg6 (MW) | 97.5555 | Pg104 (MW) | 3.1914 | Vg80 (PU) | 0.9698 |
| Pg8 (MW) | 31.8538 | Pg105 (MW) | 2.1724 | Vg85 (PU) | 0.9591 |
| Pg10 (MW) | 278.4146 | Pg107 (MW) | 68.9825 | Vg87 (PU) | 0.9531 |
| Pg12 (MW) | 57.9114 | Pg110 (MW) | 99.9985 | Vg89 (PU) | 0.9666 |
| Pg15 (MW) | 4.6559 | Pg111 (MW) | 38.254 | Vg90 (PU) | 1.008 |
| Pg18 (MW) | 16.1638 | Pg112 (MW) | 17.6654 | Vg91 (PU) | 1.0387 |
| Pg19 (MW) | 0.6935 | Pg113 (MW) | 1.5754 | Vg92 (PU) | 0.9926 |
| Pg24 (MW) | 7.3221 | Pg116 (MW) | 54.8051 | Vg99 (PU) | 1.0387 |
| Pg25 (MW) | 125.5236 | Vg1 (PU) | 0.9559 | Vg100 (PU) | 1.004 |
| Pg26 (MW) | 262.3018 | Vg4 (PU) | 1.0163 | Vg103 (PU) | 0.9808 |
| Pg27 (MW) | 4.2622 | Vg6 (PU) | 0.9937 | Vg104 (PU) | 0.9744 |
| Pg31 (MW) | 1.9636 | Vg8 (PU) | 1.0183 | Vg105 (PU) | 0.9894 |
| Pg32 (MW) | 53.1329 | Vg10 (PU) | 0.9984 | Vg107 (PU) | 1.0007 |
| Pg34 (MW) | 0.763 | Vg12 (PU) | 0.9844 | Vg110 (PU) | 1.011 |
| Pg36 (MW) | 0.0233 | Vg15 (PU) | 1.0946 | Vg111 (PU) | 1.0458 |
| Pg40 (MW) | 39.9631 | Vg18 (PU) | 1.0531 | Vg112 (PU) | 0.952 |
| Pg42 (MW) | 9.4247 | Vg19 (PU) | 1.0939 | Vg113 (PU) | 1.0726 |
| Pg46 (MW) | 15.8308 | Vg24 (PU) | 0.9841 | Vg116 (PU) | 1.0523 |
| Pg49 (MW) | 81.5138 | Vg25 (PU) | 1.0359 | T8 (pu) | 0.95 |
| Pg54 (MW) | 0.217 | Vg26 (PU) | 0.9543 | T32 (pu) | 0.94 |
| Pg55 (MW) | 11.059 | Vg27 (PU) | 1.0132 | T36 (pu) | 0.99 |
| Pg56 (MW) | 0 | Vg31 (PU) | 1.0137 | T51 (pu) | 1.01 |
| Pg59 (MW) | 121.5805 | Vg32 (PU) | 1.0459 | T93 (pu) | 1.08 |
| Pg61 (MW) | 124.1151 | Vg34 (PU) | 1.0788 | T95 (pu) | 1.08 |
| Pg62 (MW) | 0.8983 | Vg36 (PU) | 1.0677 | T102 (pu) | 0.98 |
| Pg65 (MW) | 59.4265 | Vg40 (PU) | 1.0986 | T107 (pu) | 1.06 |
| Pg66 (MW) | 285.8251 | Vg42 (PU) | 1.0881 | T127 (pu) | 1.08 |
| Pg69 (MW) | 406.1577 | Vg46 (PU) | 1.0272 | Qc5 (MVAr) | −40 |
| Pg70 (MW) | 1.5995 | Vg49 (PU) | 1.0583 | Qc34 (MVAr) | 11.3 |
| Pg72 (MW) | 0.2329 | Vg54 (PU) | 1.0871 | Qc37 (MVAr) | −22 |
| Pg73 (MW) | 3.7515 | Vg55 (PU) | 1.087 | Qc44 (MVAr) | 0 |
| Pg74 (MW) | 99.9542 | Vg56 (PU) | 1.0808 | Qc45 (MVAr) | 8.7 |
| Pg76 (MW) | 1.9594 | Vg59 (PU) | 1.0141 | Qc46 (MVAr) | 9.3 |
| Pg77 (MW) | 8.1114 | Vg61 (PU) | 0.9962 | Qc48 (MVAr) | 0.2 |
| Pg80 (MW) | 17.8145 | Vg62 (PU) | 0.9999 | Qc74 (MVAr) | 9.4 |
| Pg85 (MW) | 4.3697 | Vg65 (PU) | 1.0195 | Qc79 (MVAr) | 2.1 |
| Pg87 (MW) | 5.0134 | Vg66 (PU) | 1.0264 | Qc82 (MVAr) | 7.6 |
| Pg89 (MW) | 316.5723 | Vg69 (PU) | 0.9637 | Qc83 (MVAr) | 9.5 |
| Pg90 (MW) | 1.1845 | Vg70 (PU) | 1.0143 | Qc105 (MVAr) | 19.3 |
| Pg91 (MW) | 1.5896 | Vg72 (PU) | 0.95 | Qc107 (MVAr) | 5.3 |
| Pg92 (MW) | 0.6171 | Vg73 (PU) | 0.95 | Qc110 (MVAr) | 1.4 |
| Pg99 (MW) | 0.7622 | Vg74 (PU) | 1.0085 | - | |
References
- El-Hawary, M.E.; Landrigan, J.K. Optimum operation of fixed-head hydro-thermal electric power systems: Powell’s Hybrid Method Versus Newton-Raphson Method. IEEE Trans. Power Appar. Syst. 1982, PAS-101, 547–554. [Google Scholar]
- Wood, A.; Wollenberg, B. Power Generation, Operation and Control; Wiley: New York, NY, USA, 1996. [Google Scholar]
- Zaghlool, M.F.; Trutt, F.C. Efficient methods for optimal scheduling of fixed head hydrothermal power systems. IEEE Trans. Power Syst. 1988, 3, 24–30. [Google Scholar] [CrossRef]
- Rashid, A.H.A.; Nor, K.M. An efficient method for optimal scheduling of fixed head hydro and thermal plants. IEEE Trans Power Syst. 1991, 6, 632–636. [Google Scholar] [CrossRef]
- Salam, M.S.; Nor, K.M.; Hamdam, A.R. Hydrothermal scheduling based Lagrangian relaxation approach to hydrothermal coordination. IEEE Trans. Power Syst. 1998, 13, 226–235. [Google Scholar] [CrossRef]
- Basu, M. Hopfield neural networks for optimal scheduling of fixed head hydrothermal power systems. Electr. Power Syst. 2003, 64, 11–15. [Google Scholar] [CrossRef]
- Sharma, A.K. Short Term Hydrothermal Scheduling Using Evolutionary Programming. Master’s Thesis, Thapar University, Patiala, India, 2009. [Google Scholar]
- Basu, M. Artificial immune system for fixed head hydrothermal power system. Energy 2011, 36, 606–612. [Google Scholar] [CrossRef]
- Farhat, I.A.; El-Hawary, M.E. Fixed-head hydro-thermal scheduling using a modified bacterial foraging algorithm. In Proceedings of the 2010 IEEE Electric Power and Energy Conference (EPEC), Halifax, NS, Canada, 25–27 August 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Sasikala, J.; Ramaswamy, M. Optimal gamma based fixed head hydrothermal scheduling using genetic algorithm. Expert Syst. Appl. 2010, 37, 3352–3357. [Google Scholar]
- Kumar, B.R.; Murali, M.; Kumari, M.S.; Sydulu, M. Short-range Fixed head Hydrothermal Scheduling using Fast Genetic Algorithm. In Proceedings of the 2012 7th IEEE Conference on Industrial Electronics and Applications (ICIEA), Singapore, 18–20 July 2012; pp. 1313–1318. [Google Scholar]
- Naranga, N.; Dhillonb, J.S.; Kothari, D.P. Scheduling short-term hydrothermal generation using predator prey optimization technique. Appl. Soft Comput. 2014, 21, 298–308. [Google Scholar] [CrossRef]
- Dommel, H.W.; Tinny, W.F. Optimal power flow solution. IEEE Trans. Power Appar. Syst. 1968, PAS-87, 1866–1876. [Google Scholar] [CrossRef]
- Stott, B.; Alsac, O.; Monticelli, A.J. Security analysis and optimization. Proc. IEEE 1987, 75, 1623–1644. [Google Scholar] [CrossRef]
- Momoh, J.A.; Koessler, R.J.; Bond, M.S.; Stott, B.; Sun, D.; Papalexopoulos, A.; Ristanovic, P. Challenges to optimal power flow. IEEE Trans. Power Syst. 1997, 12, 444–447. [Google Scholar] [CrossRef]
- Cain, M.B.; O’Neill, R.P.; Castillo, A. History of Optimal Power Flow and Formulations; FERC Staff Technical Paper; Federal Energy Regulatory Commission: Washington, DC, USA, 2012.
- Thukaram, D.; Parhasarathy, K.; Khincha, H.P.; Narendranath, U.; Bansilal, A. Voltage stability improvement: Case studies if Indian power networks. Electr. Power Syst. Res. 1998, 44, 35–44. [Google Scholar] [CrossRef]
- Yesuratnam, G.; Thukaram, D. Congestion management in open access based on relative electrical distances using Voltage stability criteria. Electr. Power Syst. Res. 2006, 77, 1608–1618. [Google Scholar] [CrossRef]
- Nagendra, P.; Dey, S.H.n.; Datta, T.; Paul, S. Voltage stability assessment of a power system incorporating FACTS controllers using unique network equivalent. Ain Shams Eng. J. 2014, 5, 103–111. [Google Scholar]
- Chen, G.; Lu, Z.; Zhang, Z. Improved Krill Herd Algorithm with Novel Constraint Handling Method for Solving Optimal Power Flow Problems. Energies 2018, 11, 76. [Google Scholar] [CrossRef]
- Martinez, J.L.; Ramous, A.; Exposito, G.; Quintana, V. Transmission loss reduction by Interior point methods: Implementation issues and practical experience. Proc. IEE Gener. Transm. Distrib. 2005, 152, 90–98. [Google Scholar] [CrossRef]
- Torres, G.L.; Quintana, V.H. An interior point method for non-linear optimal power flow using Voltage rectangular coordinates. IEEE Trans. Power Syst. 1998, 13, 1211–1218. [Google Scholar] [CrossRef]
- Torres, G.L.; Quintana, V.H. Optimal power flow by a non-linear complementarity method. IEEE Trans. Power Syst. 2000, 15, 1028–1033. [Google Scholar] [CrossRef]
- Oliveira, E.J.; Oliveira, L.W.; Pereira, J.L.R.; Honório, L.M.; Junior, I.C.S.; Marcato, A.L.M. An optimal power flow based on safety barrier interior point method. Electr. Power Energy Syst. 2015, 64, 977–985. [Google Scholar] [CrossRef]
- Deb, K. Multi-Objective Optimization Using Evolutionary Algorithms; John Wiley and Sons, Inc.: New York, NY, USA, 2001. [Google Scholar]
- Osman, M.S.; Abo-Sinna, M.A.; Mousa, A.A. A solution to the optimal power flow using genetic algorithm. Appl. Math. Comput. 2004, 155, 391–405. [Google Scholar] [CrossRef]
- Yuryevich, J. evolutionary programming based optimal power flow algorithm. IEEE Trans. Power Syst. 1999, 14, 1245–1250. [Google Scholar] [CrossRef]
- Abido, M.A. Optimal power flow using particle swarm optimization. Int. J. Electr. Power Energy Syst. 2002, 24, 563–571. [Google Scholar] [CrossRef]
- El Ela, A.A.A.; Abido, M.A.; Spea, S.R. Optimal power flow using differential evolution algorithm. Electr. Power Syst. Res. 2010, 80, 878–885. [Google Scholar] [CrossRef]
- Abido, M.A. Optimal power flow using tabu search algorithm. Electr. Power Compon. Syst. 2002, 30, 469–483. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Chattopadhyay, P.K. Application of biogeography-based optimisation to solve different optimal power flow problems. IET Gener. Transm. Distrib. 2011, 5, 70–80. [Google Scholar] [CrossRef]
- Roa-Sepulveda, C.A.; Pavez-Lazo, B.J. A solution to the optimal power flow using simulated annealing. Int. J. Electr. Power Energy Syst. 2003, 25, 47–57. [Google Scholar] [CrossRef]
- Vaisakh, K.; Srinivas, L.R.; Meah, K. Genetic eVolving ant direction particle swarm optimization algorithm for optimal power flow with non-smooth cost functions and statistical analysis. Appl. Soft Comput. 2013, 13, 4579–4593. [Google Scholar] [CrossRef]
- Niknam, T.; Narimani, M.R.; Abarghooee, R.A. A new hybrid algorithm for optimal power flow considering prohibited zones and valve point effect. Energy Convers. Manag. 2012, 58, 197–206. [Google Scholar] [CrossRef]
- Li, Y.Z.; Li, M.S.; Wu, Q.H. Energy saving dispatch with complex constraints: Prohibited zones, valve point effect and carbon tax. Electr. Power Energy Syst. 2014, 63, 657–666. [Google Scholar] [CrossRef]
- Bouchekaraa, H.R.E.H.; Abido, M.A.; Boucherma, M. Optimal power flow using teaching-learning-based optimization technique. Electr. Power Syst. Res. 2014, 114, 49–59. [Google Scholar] [CrossRef]
- Ghasemi, M.; Ghavidel, S.; Gitizadeh, M.; Akbari, E. An improved teaching–learning-based optimization algorithm using Lévy mutation strategy for nonsmooth optimal power flow. Electr. Power Energy Syst. 2015, 65, 375–384. [Google Scholar] [CrossRef]
- Sayah, S.; Zehar, K. Modified differential evolution algorithm for optimal power flow with non-smooth cost functions. Energy Convers. Manag. 2008, 49, 3036–3042. [Google Scholar] [CrossRef]
- Amjady, N.; Sharifzadeh, H. Security constrained optimal power flow considering detailed generator model by a new robust differential evolution algorithm. Electr. Power Syst. Res. 2011, 81, 740–749. [Google Scholar] [CrossRef]
- Tan, Y.; Li, C.; Cao, Y.; Lee, K.Y.; Li, L.; Tang, S.; Zhou, L. Improved group search optimization method for optimal power flow problem considering valve-point loading effects. Neurocomputing 2015, 148, 229–239. [Google Scholar] [CrossRef]
- Bakirtzis, A.G.; Biskas, P.N.; Zoumas, C.E.; Petridis, V. Optimal power flow by enhanced genetic algorithm. IEEE Trans. Power Syst. 2002, 17, 229–236. [Google Scholar] [CrossRef]
- Reddy, S.S.; Bijwe, P.R.; Abhyankar, A.R. Faster evolutionary algorithm based optimal power flow using incremental variables. Electr. Power Energy Syst. 2014, 54, 198–210. [Google Scholar] [CrossRef]
- Alsac, O.; Scott, B. Optimal power flow with steady state security. IEEE Trans. Power Appar. Syst. 1974, 93, 745–751. [Google Scholar] [CrossRef]
- Lai, L.L.; Ma, J.T.; Yokoyama, R.; Zhao, M. Improved genetic algorithms for optimal power flow under both normal and contingent operation states. Electr. Power Energy Syst. 1997, 19, 287–292. [Google Scholar] [CrossRef]
- Sivasubramani, S.; Swarup, K.S. Multi-agent based differential evolution approach to optimal power flow. Appl. Soft Comput. 2012, 12, 735–740. [Google Scholar] [CrossRef]
- Soliman, A.; Mantawy, A.H. Modern Optimizati on Techniques with Applications in Electric Power Systems; Springer: New York, NY, USA, 2010. [Google Scholar]
- Elsaiah, S.; Cai, N.; Benidris, M.; Mitra, J. A Fast Economic Power Dispatch Method for Power System Planning Studies. IET Gener. Transm. Distrib. 2015, 9, 417–426. [Google Scholar] [CrossRef]
- El-Hawary, M.E.; Tsang, D.H. The Hydrothermal Optimal Load Flow, A Practical Formulation and Solution Techniques Using Newton’s Approach. IEEE Trans. Power Syst. 1986, 1, 157–166. [Google Scholar] [CrossRef]
- Habibollahzadeh, H.; Semlyen, G.X.L.A. Hydrothermal optimal power flow based on a combined linear and nonlinear programming methodology. IEEE Trans. Power Syst. 1989, 4, 530–537. [Google Scholar] [CrossRef]
- Angelidis, G. Short-term Optimal Hydrothermal Scheduling Problem Considering Power Flow Constraint. Can. J. Elect. Comp. Eng. 1994, 19, 81–86. [Google Scholar] [CrossRef]
- Wei, H.; Sasaki, H.; Kubokawa, J. Interior point method for hydro-thermaloptimal power flow. In Proceedings of the 1995 International Conference on Energy Management and Power Delivery (EMPD ‘95), Singapore, 21–23 November 1995; Volume 2, pp. 607–612. [Google Scholar]
- Wei, H.; Sasaki, H.; Kubokawa, J.; Yokoyama, R. Large Scale Hydrothermal Optimal Power Flow Problems Based on Interior Point Nonlinear Programming. IEEE Trans. Power Syst. 2002, 15, 396–403. [Google Scholar] [CrossRef]
- Lin, S.; Huang, J.; Zhang, J.; Tang, Q.; Qiu, W. Short-term optimal hydrothermal scheduling with power flow constraint. In Proceedings of the 27th Chinese Control and Decision Conference (2015 CCDC), Qingdao, China, 23–25 May 2015; pp. 1189–1194. [Google Scholar]
- Nguyen, T.T.; Vo, D.N.; Truong, A.V.; Ho, L.D. Meta-Heuristic Algorithms for Solving Hydrothermal System Scheduling Problem Considering Constraints in Transmission Lines. Glob. J. Technol. Optim. 2016, 7, 1–6. [Google Scholar] [CrossRef]
- Yang, X.S.; Deb, S. Cuckoo search via Lévy flights. In Proceedings of the World Congress on Nature & Biologically Inspired Computing (NaBIC 2009), Coimbatore, India, 9–11 December 2009; pp. 210–214. [Google Scholar]
- Walton, S.; Hassan, O.; Morgan, K.; Brown, M.R. Modified cuckoo search: A new gradient free optimisation algorithm. Chaos Solut. Fractals 2011, 44, 710–718. [Google Scholar] [CrossRef]
- Derrac, J.; Molina, G.S.D.; Herrera, F. A practical tutorial on the use of nonparametric statistical tests as a methodology for comparing evolutionary and swarm intelligence algorithms. Swarm Evolut. Comput. 2011, 1, 3–18. [Google Scholar] [CrossRef]


| if randd < Pro Calculate Dd if Dd > tol else end else end |
| Step 1. Mix all old solutions and all new solutions |
| Step 2. Identify identical solutions. Keep only one and eliminate rest of identical ones |
| Step 3. Sort all solutions in order of ascending fitness function values |
| Step 4. Keep the first Np solutions |
| Method | System | |||
|---|---|---|---|---|
| 30 Buses | 118 Buses | |||
| Parameter | ||||
| Np | Gmax | Np | Gmax | |
| CCSA | 10 | 150 | 20 | 300 |
| MCSA | 10 | 150 | 20 | 300 |
| ENCSA | 10 | 150 | 20 | 300 |
| Parameter | Method | ||
|---|---|---|---|
| CCSA | MCSA | ENCSA | |
| Pro | 0.9 | 0.8 | 0.9 |
| Min. cost ($) | 13,722.208 | 13,718.230 | 13,655.538 |
| Mean cost ($) | 13,759.815 | 13,783.937 | 13,808.732 |
| Max. cost ($) | 13,815.143 | 14,066.094 | 14,548.909 |
| Std dev. ($) | 16.895 | 53.707 | 171.314 |
| CPU time (s) | 67.036 | 65.695 | 65.871 |
| Successes rate (SR) | 76% | 91% | 98% |
| Parameter | Method | ||
|---|---|---|---|
| CCSA | MCSA | ENCSA | |
| Pro | 0.9 | 0.9 | 0.8 |
| Min. cost ($) | 3,088,459.0 | 2,994,592.1 | 2,818,001.7 |
| Mean cost ($) | 3,358,689.2 | 3,216,312.3 | 2,961,433.3 |
| Max. cost ($) | 3,665,459.0 | 3,491,042.1 | 3,336,941.4 |
| Std dev. ($) | 153,667.7 | 129,941.3 | 123,993.9 |
| CPU time (s) | 278 | 286 | 282 |
| SR | 21% | 46% | 66% |
| Tested System | Method | Size | Mean | Std. | t | df | p Value |
|---|---|---|---|---|---|---|---|
| 30 buses | ASCSA | 50 | 13,808.73 | 171.314 | NA | NA | NA |
| CCSA | 50 | 13,759.82 | 16.895 | 2.0093251 | 0.08428355 | ≈0.3 | |
| MCSA | 50 | 13,783.94 | 53.707 | 2.30637854 | 0.01628009 | ≈0.3 | |
| 118 buses | ASCSA | 50 | 2,961,433.30 | 123,993.9 | NA | NA | NA |
| CCSA | 50 | 3,358,689.20 | 153,667.7 | 14.2261863 | 1.2031E-07 | <0.05 | |
| MCSA | 50 | 3,216,312.30 | 129,941.3 | 9.50689037 | 1.6885E-07 | <0.05 |
| Tested System | Method | p Value |
|---|---|---|
| 30 buses | CCSA | 0.184 |
| MCSA | 0.251 | |
| 118 buses | CCSA | 0.0298 |
| MCSA | 0.0312 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, T.T.; Dinh, B.H.; Quynh, N.V.; Duong, M.Q.; Dai, L.V. A Novel Algorithm for Optimal Operation of Hydrothermal Power Systems under Considering the Constraints in Transmission Networks. Energies 2018, 11, 188. https://doi.org/10.3390/en11010188
Nguyen TT, Dinh BH, Quynh NV, Duong MQ, Dai LV. A Novel Algorithm for Optimal Operation of Hydrothermal Power Systems under Considering the Constraints in Transmission Networks. Energies. 2018; 11(1):188. https://doi.org/10.3390/en11010188
Chicago/Turabian StyleNguyen, Thang Trung, Bach Hoang Dinh, Nguyen Vu Quynh, Minh Quan Duong, and Le Van Dai. 2018. "A Novel Algorithm for Optimal Operation of Hydrothermal Power Systems under Considering the Constraints in Transmission Networks" Energies 11, no. 1: 188. https://doi.org/10.3390/en11010188