Analysis on the Amplitude and Frequency Characteristics of the Rotor Unbalanced Magnetic Pull of a Multi-Pole Synchronous Generator with Inter-Turn Short Circuit of Field Windings

Abstract
:1. Introduction
2. Frequency Characteristics Analysis of Rotor UMP
2.1. MMF Analysis during ISCFW
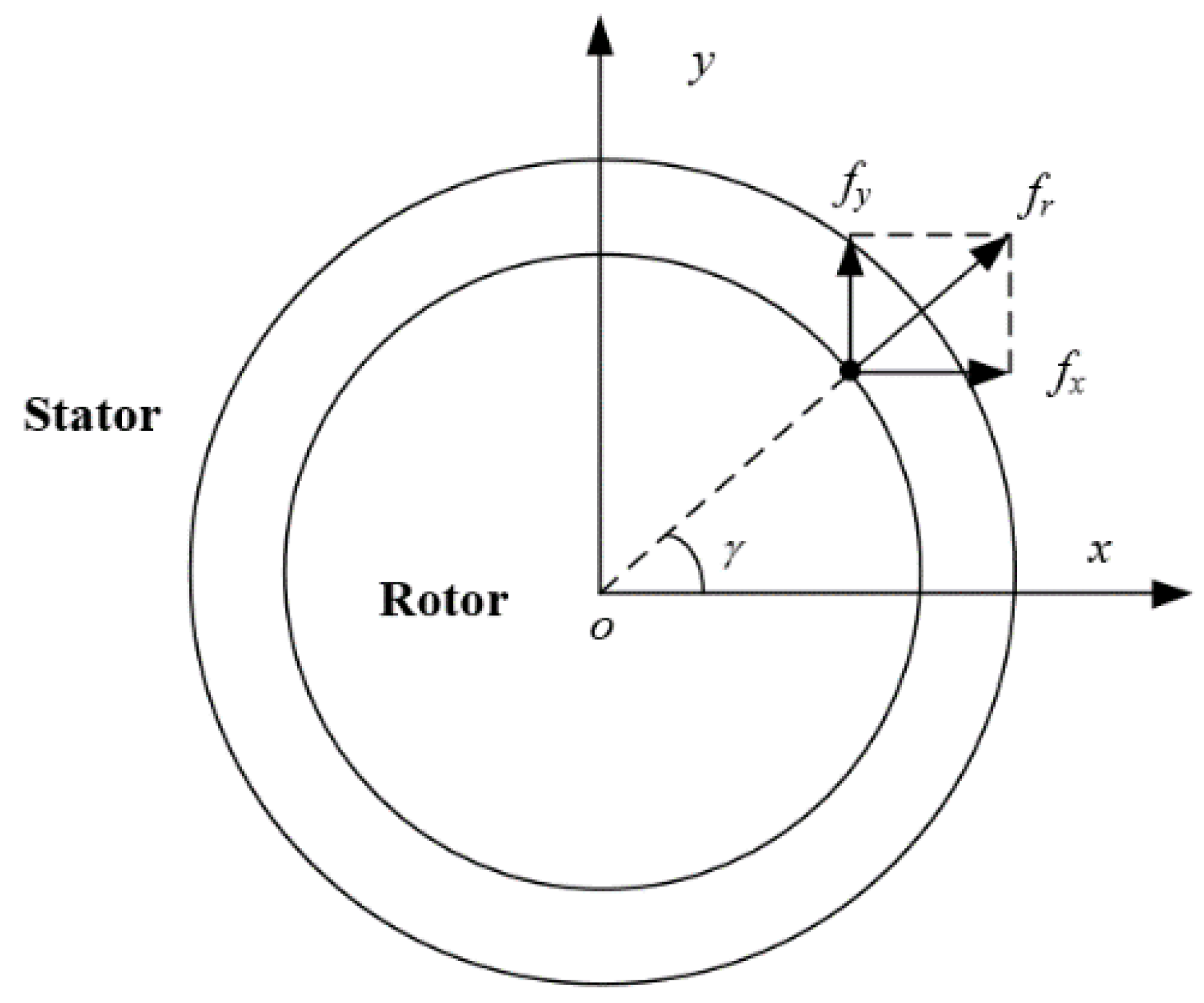
2.2. Calculation of Rotor UMP
2.3. Analysis on Role of Space MMF on UMP
2.3.1. Effect of the Same Harmonic MMF Respectively Generated by Rotor and Stator on UMP
2.3.2. Effect of Two Kinds of Harmonic MMF Generated by Stator or Rotor on UMP
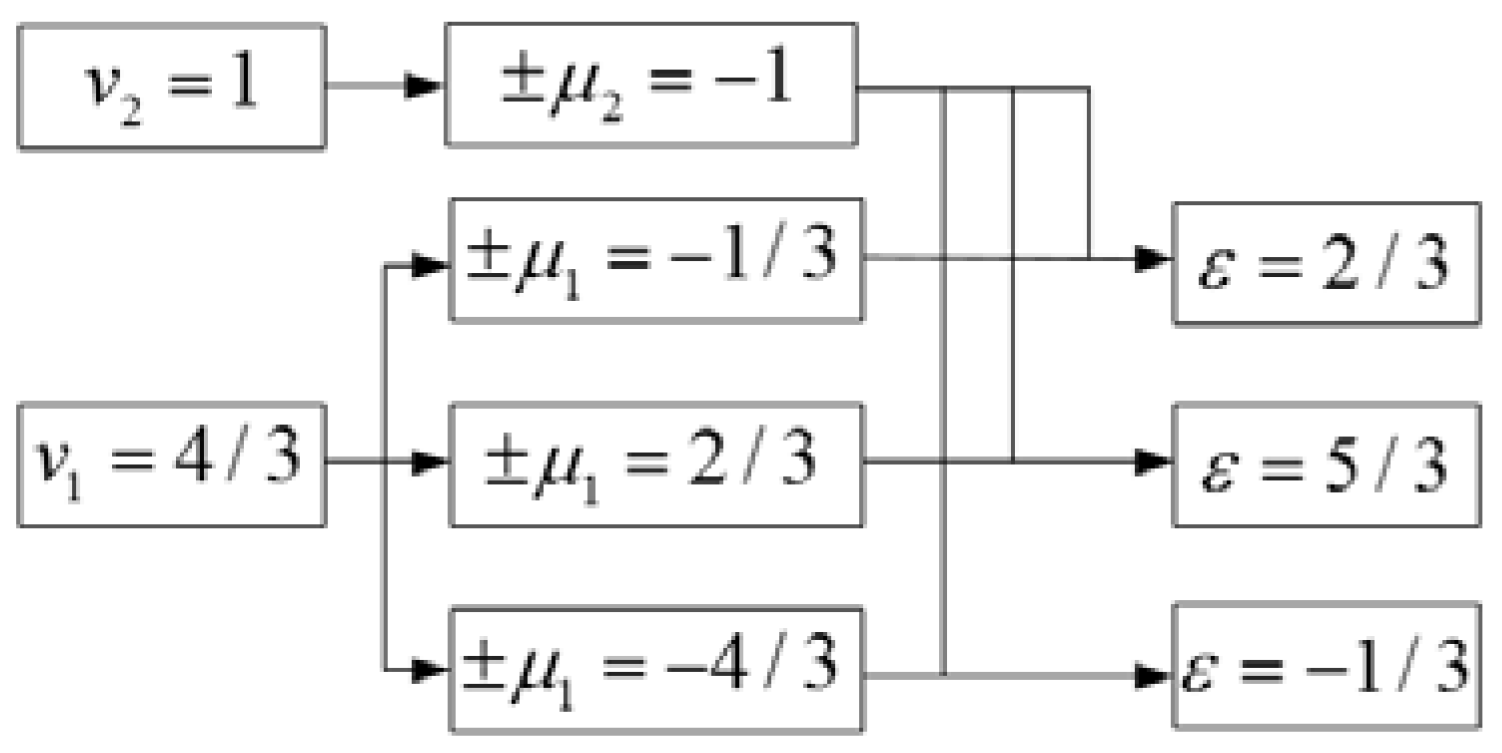
2.3.3. Effect of Two Different Kinds of Harmonic MMF Generated by Stator and Rotor on UMP
3. Analysis and Simulation of Rotor UMP Frequency Characteristics during an Inter-Turn Short Circuit
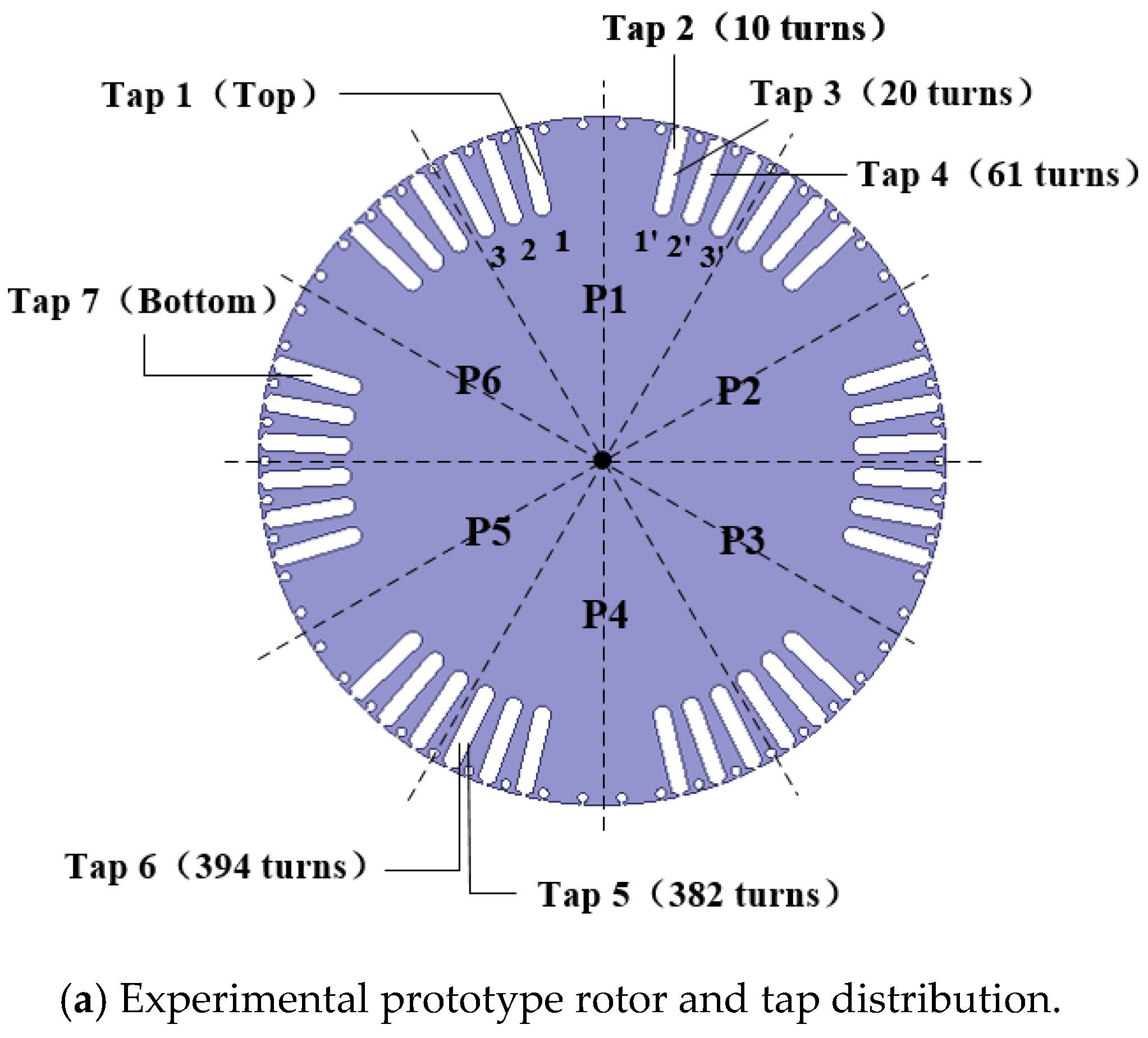
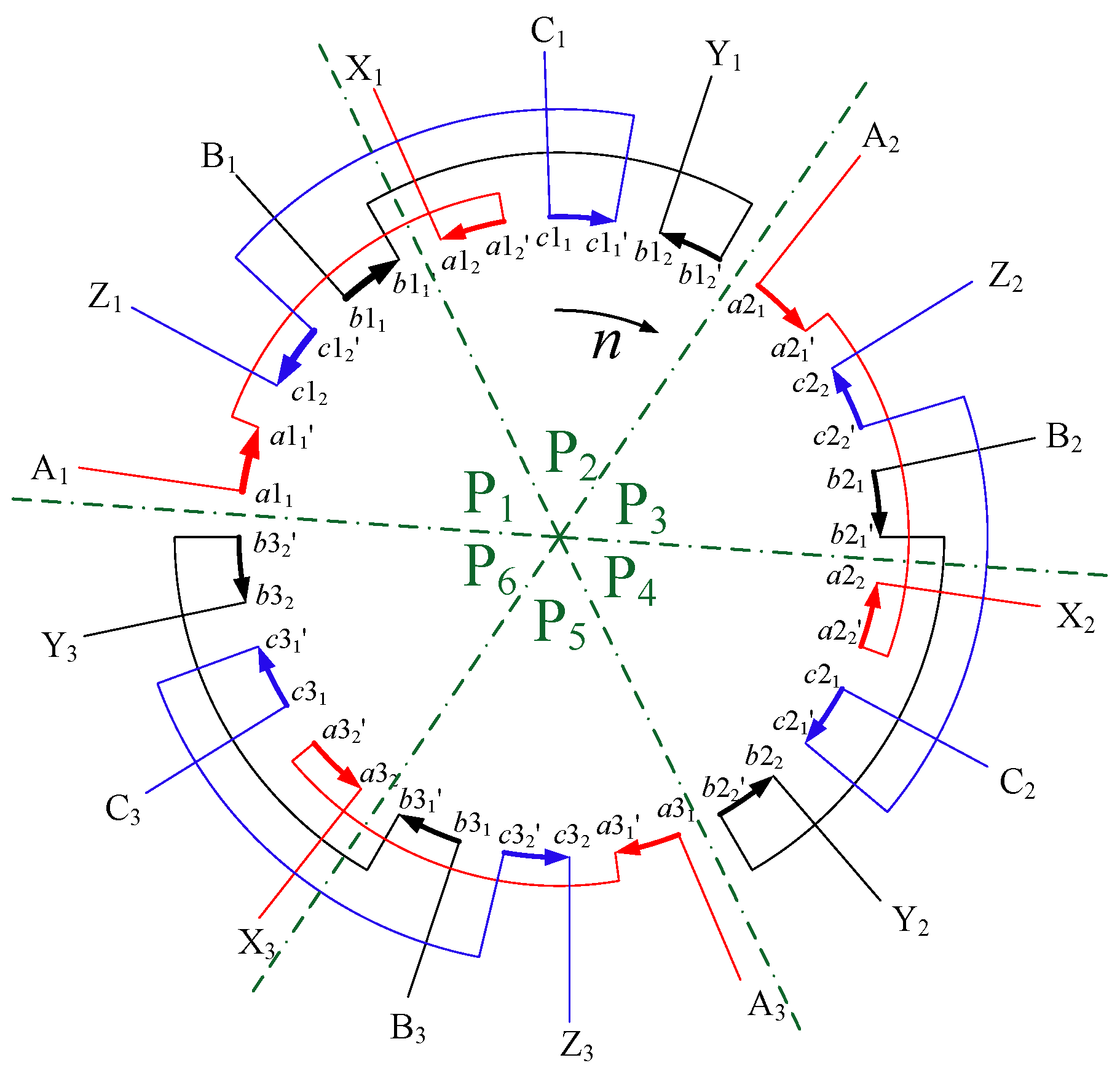
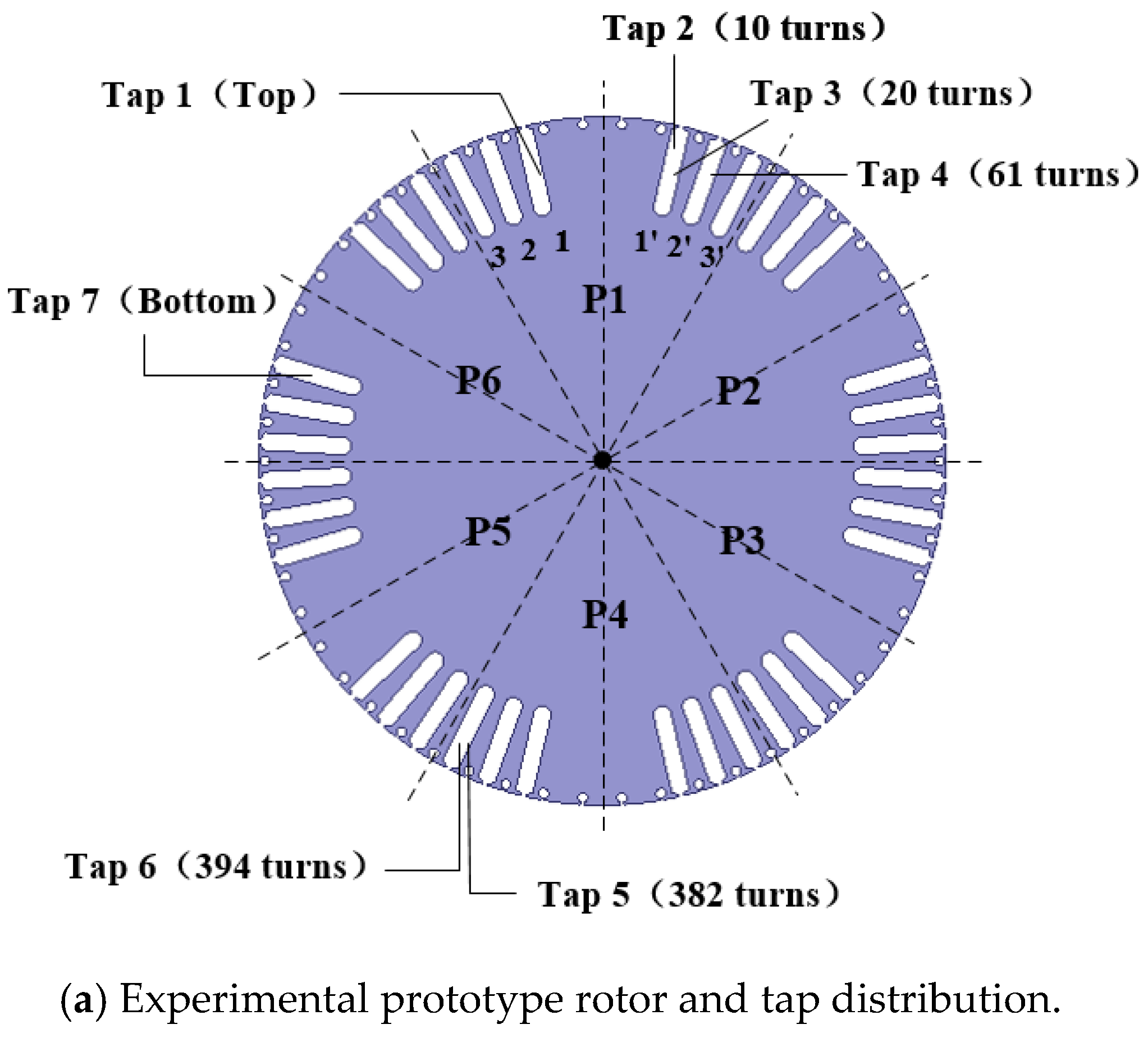
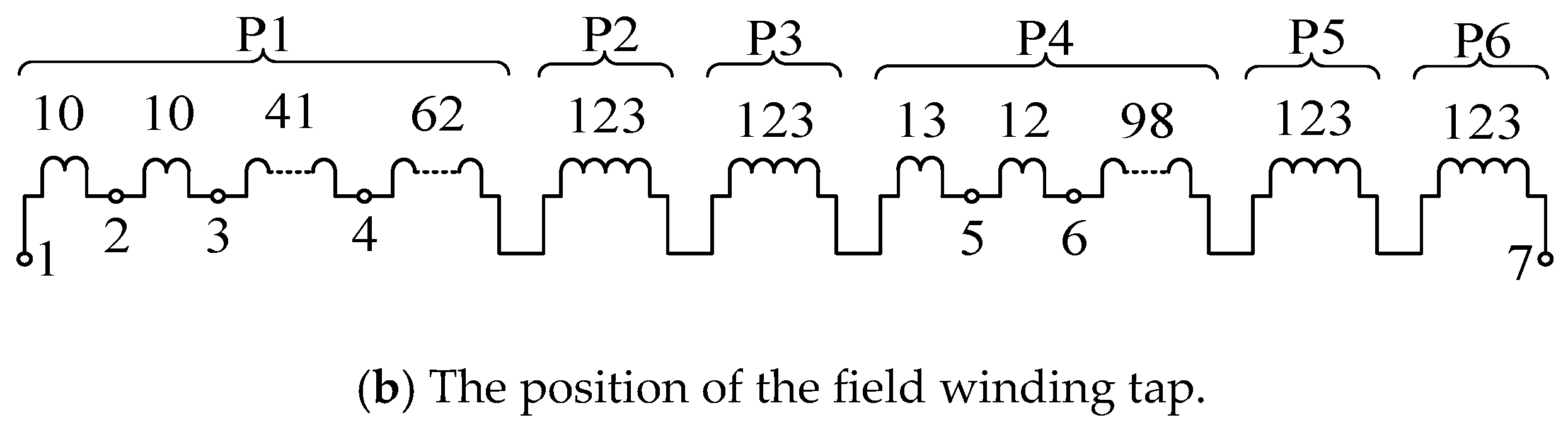
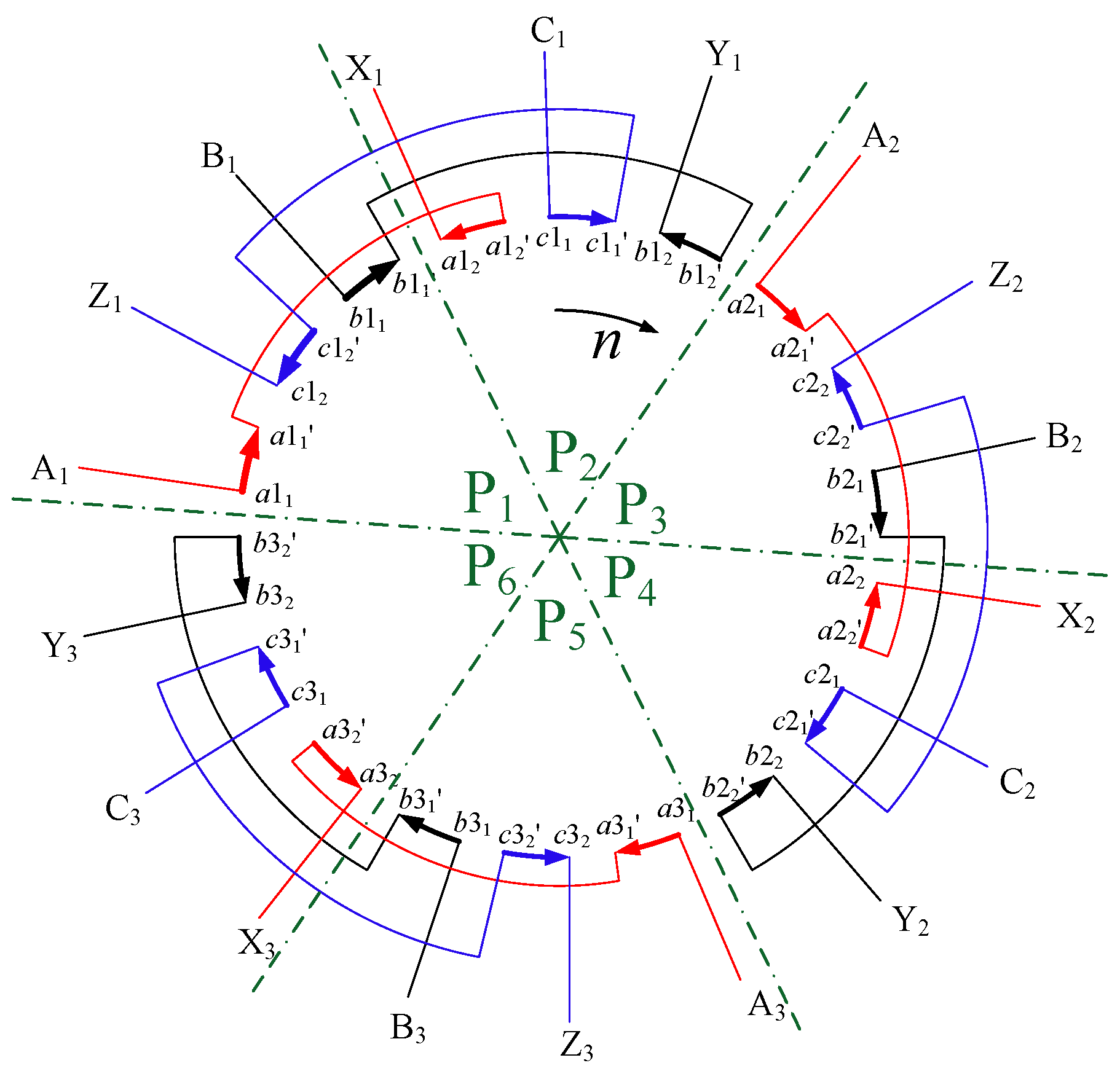
3.1. Analysis on Experimental Prototype
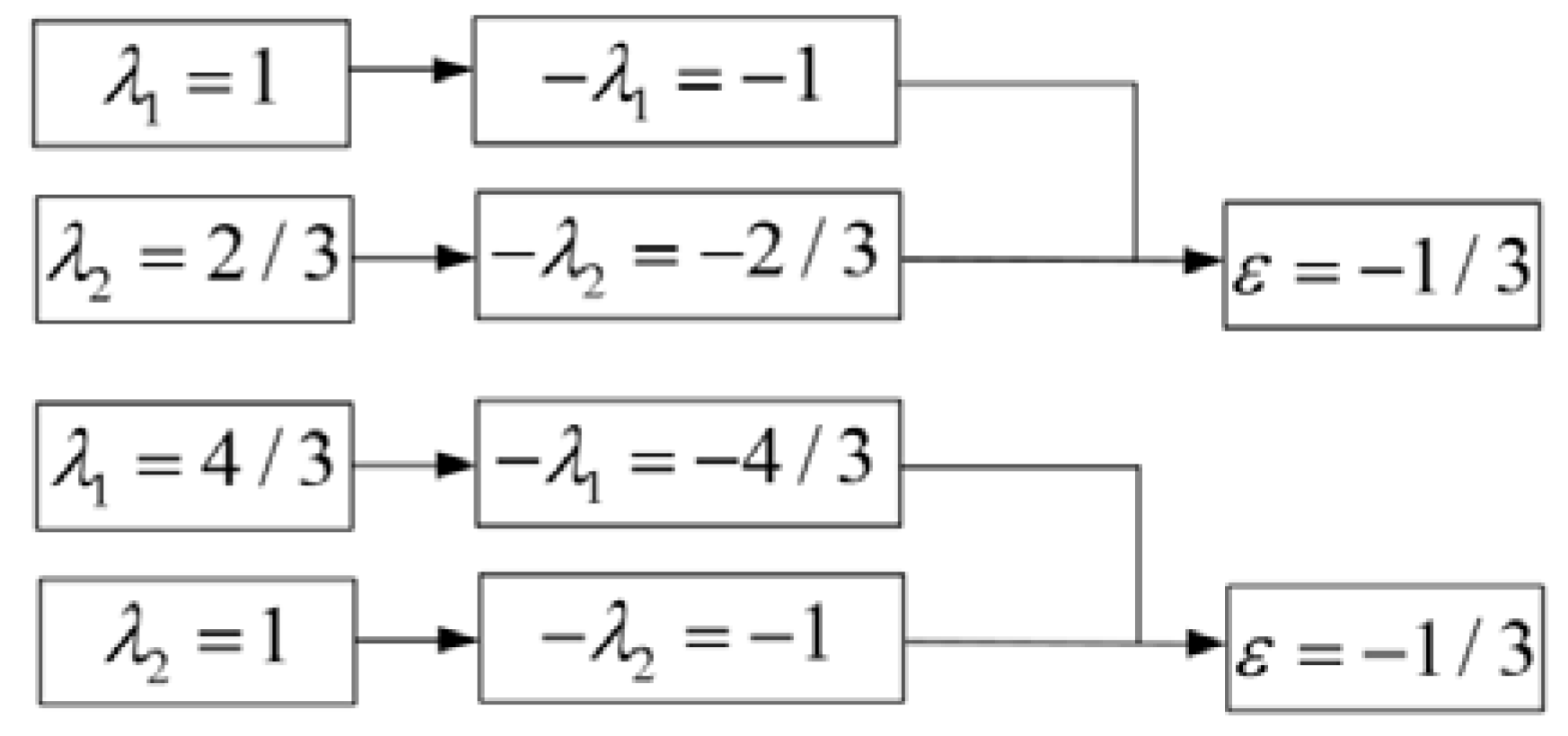
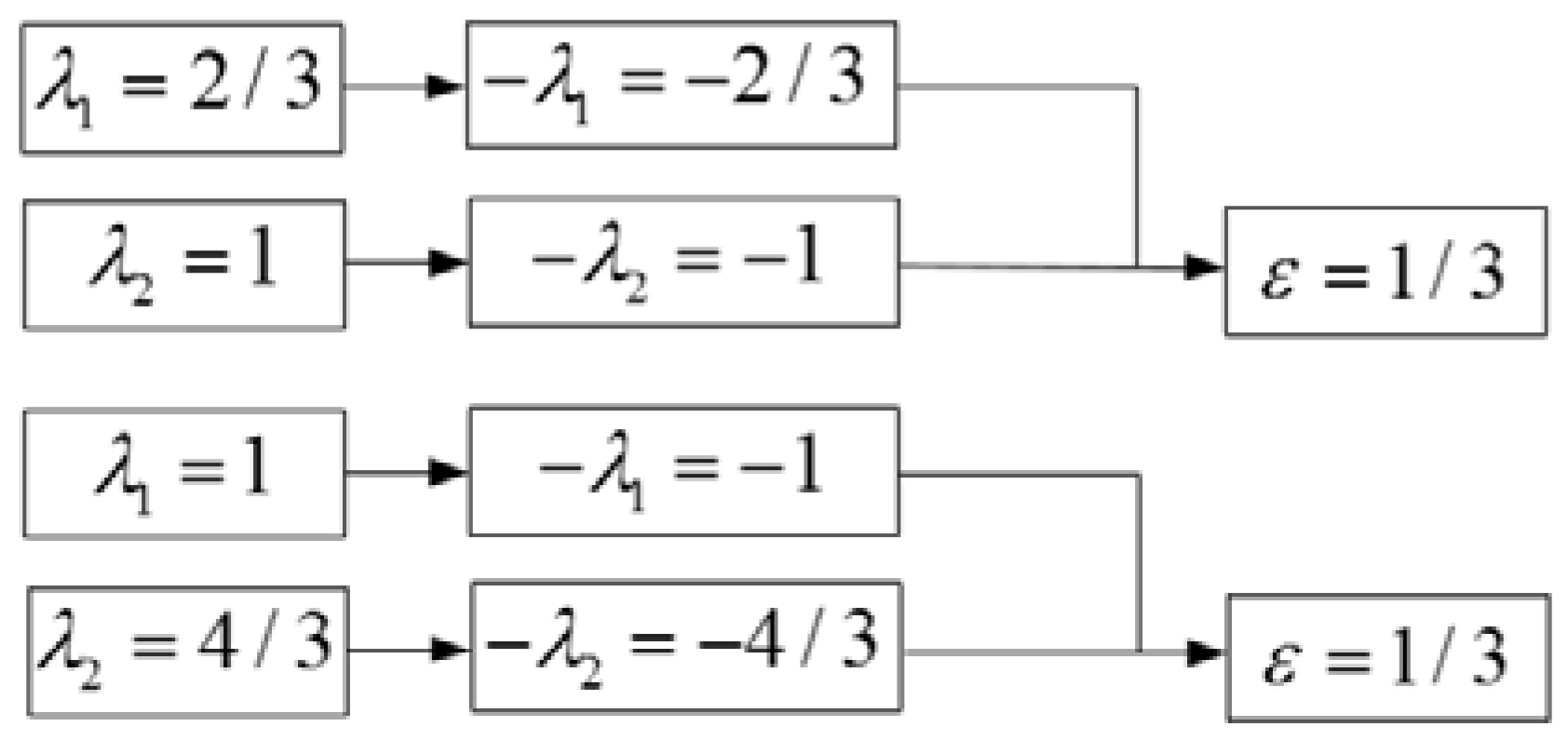
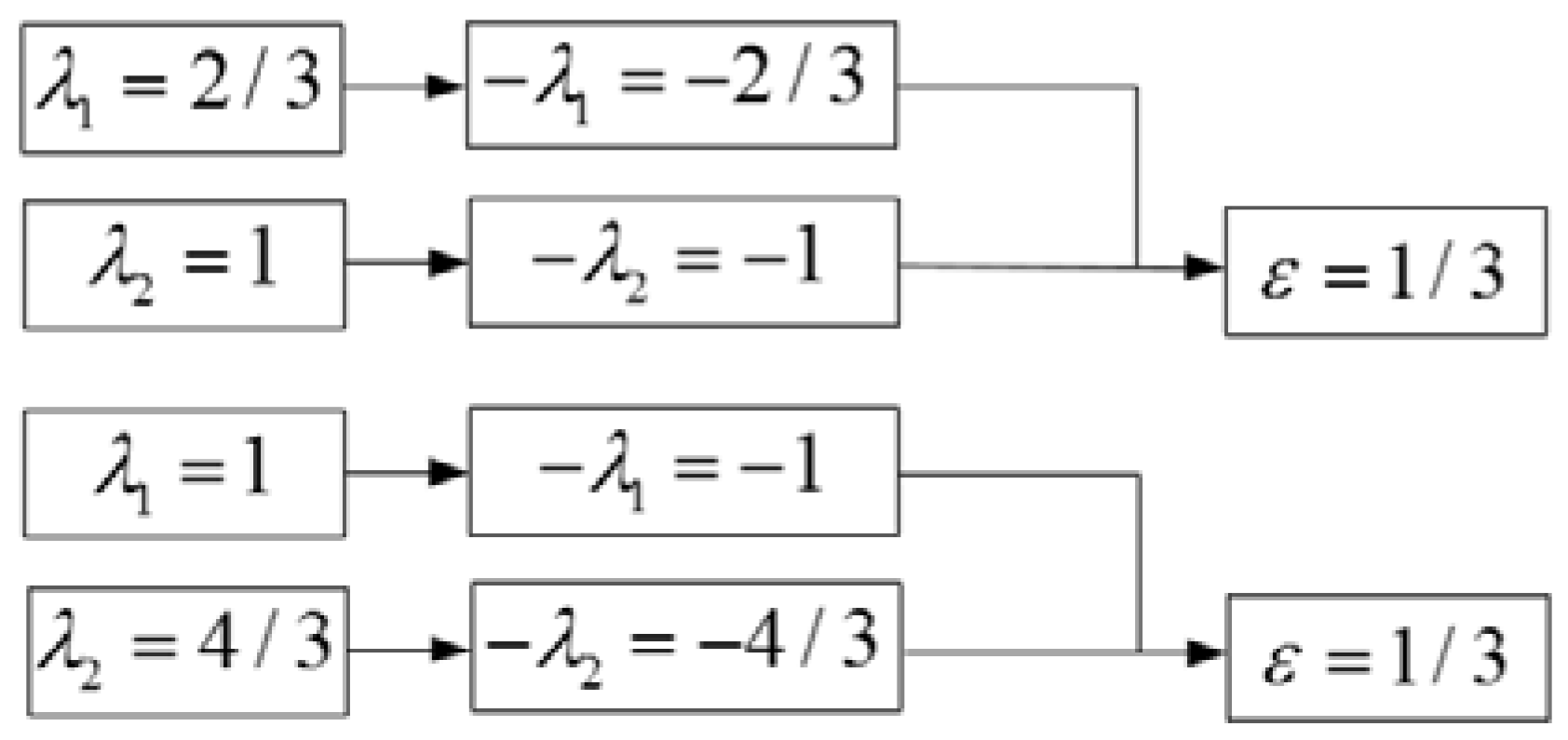
3.1.1. Interaction Results Analysis of Two Different Kinds of Stator Harmonic MMF
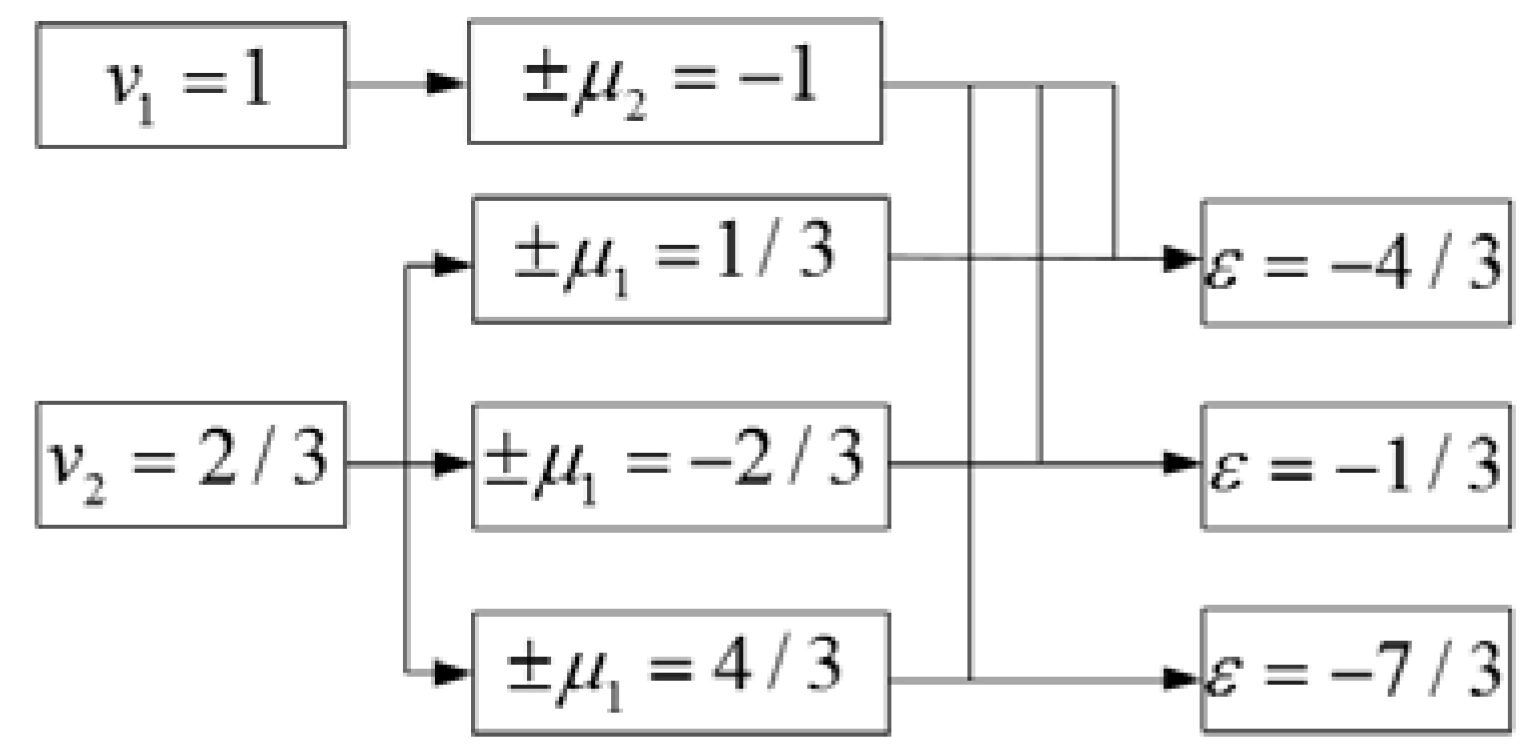
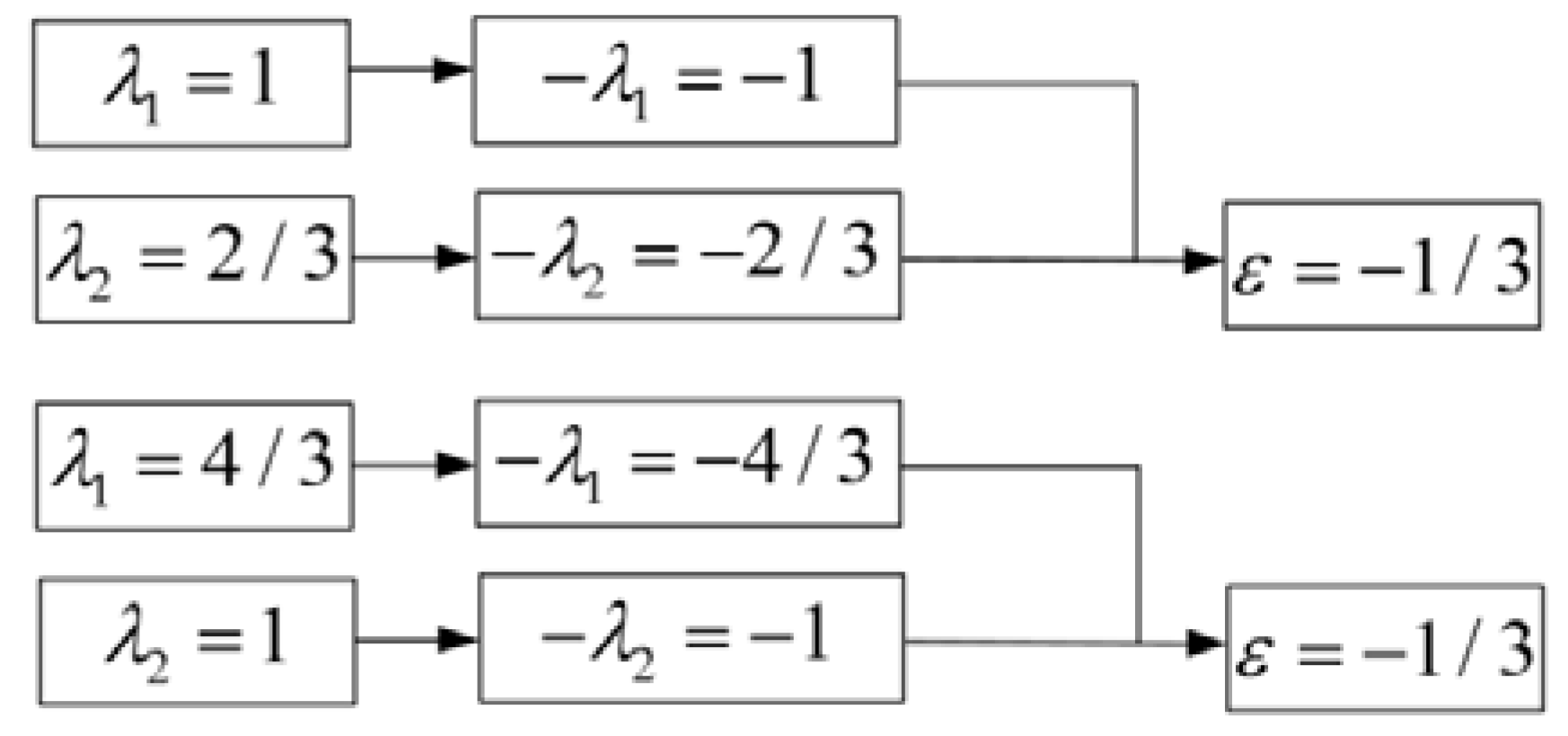
3.1.2. Interaction Result Analysis of Two Different Kinds of Rotor Harmonic MMF
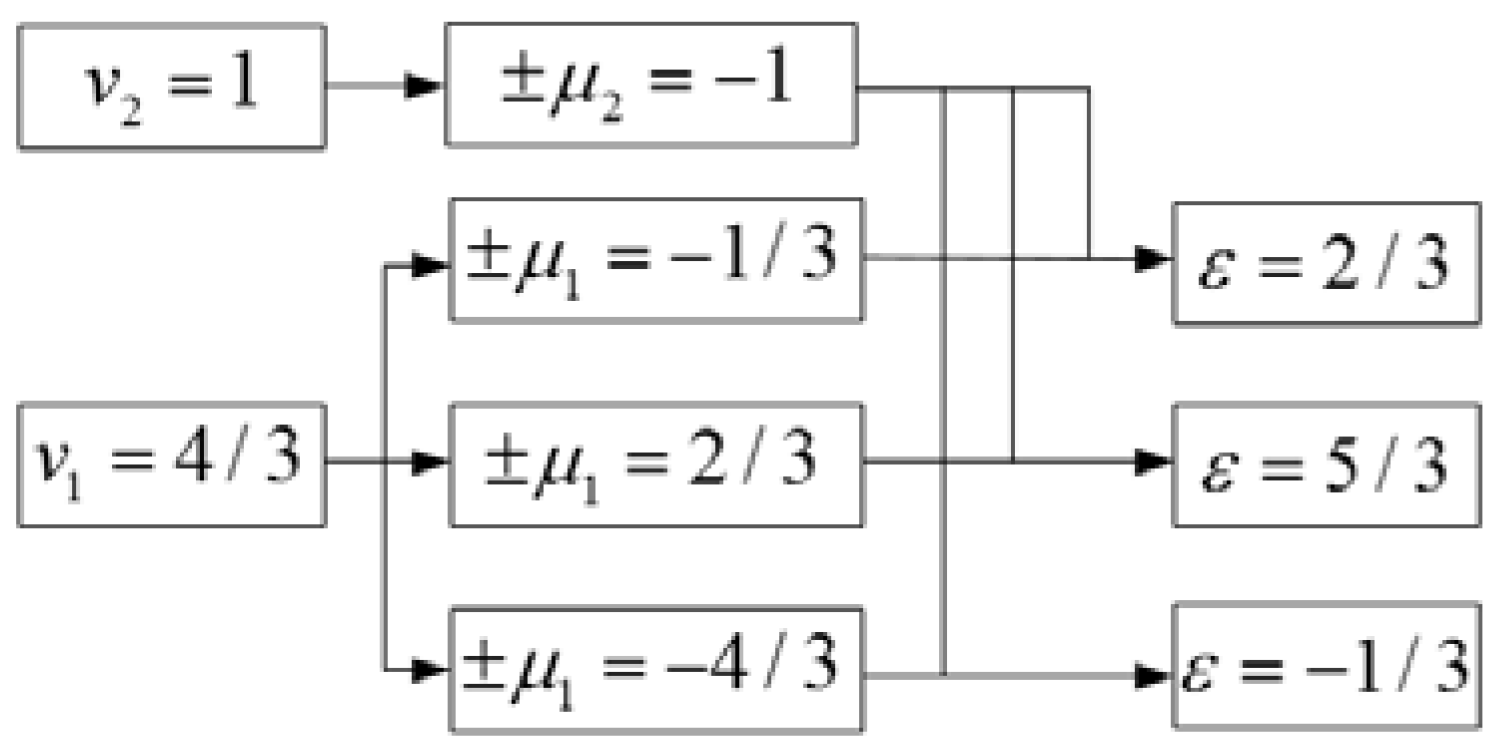
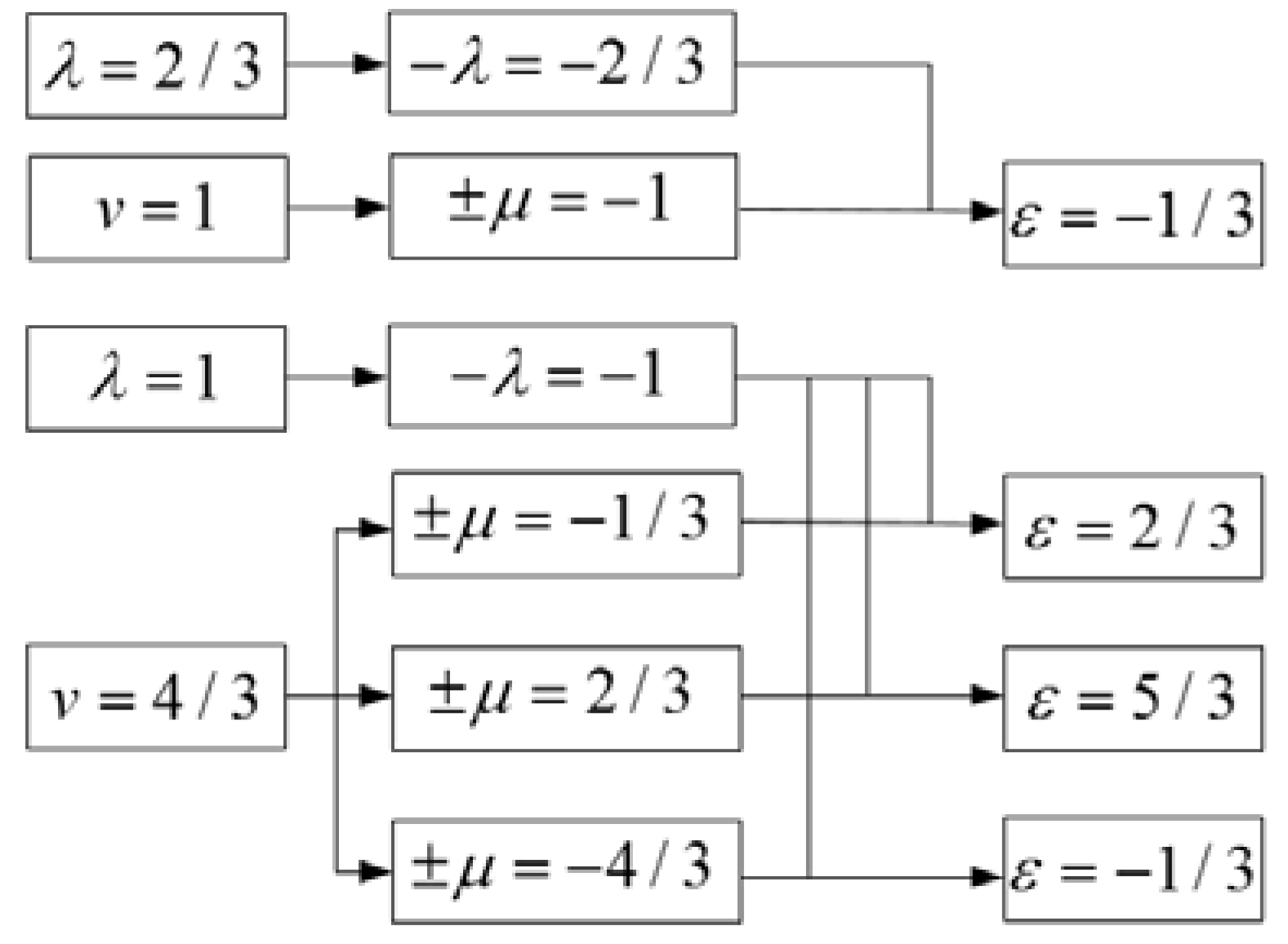
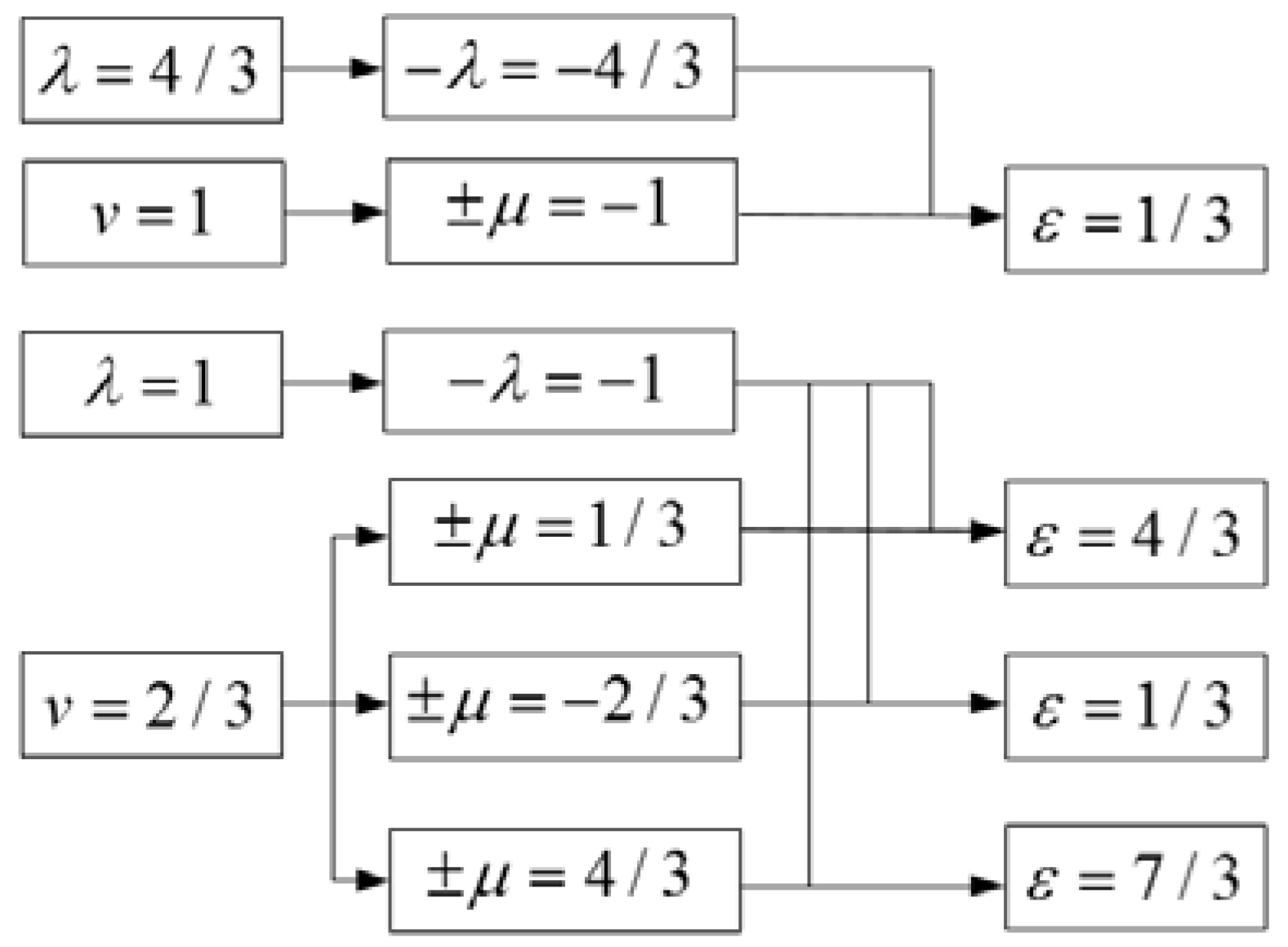
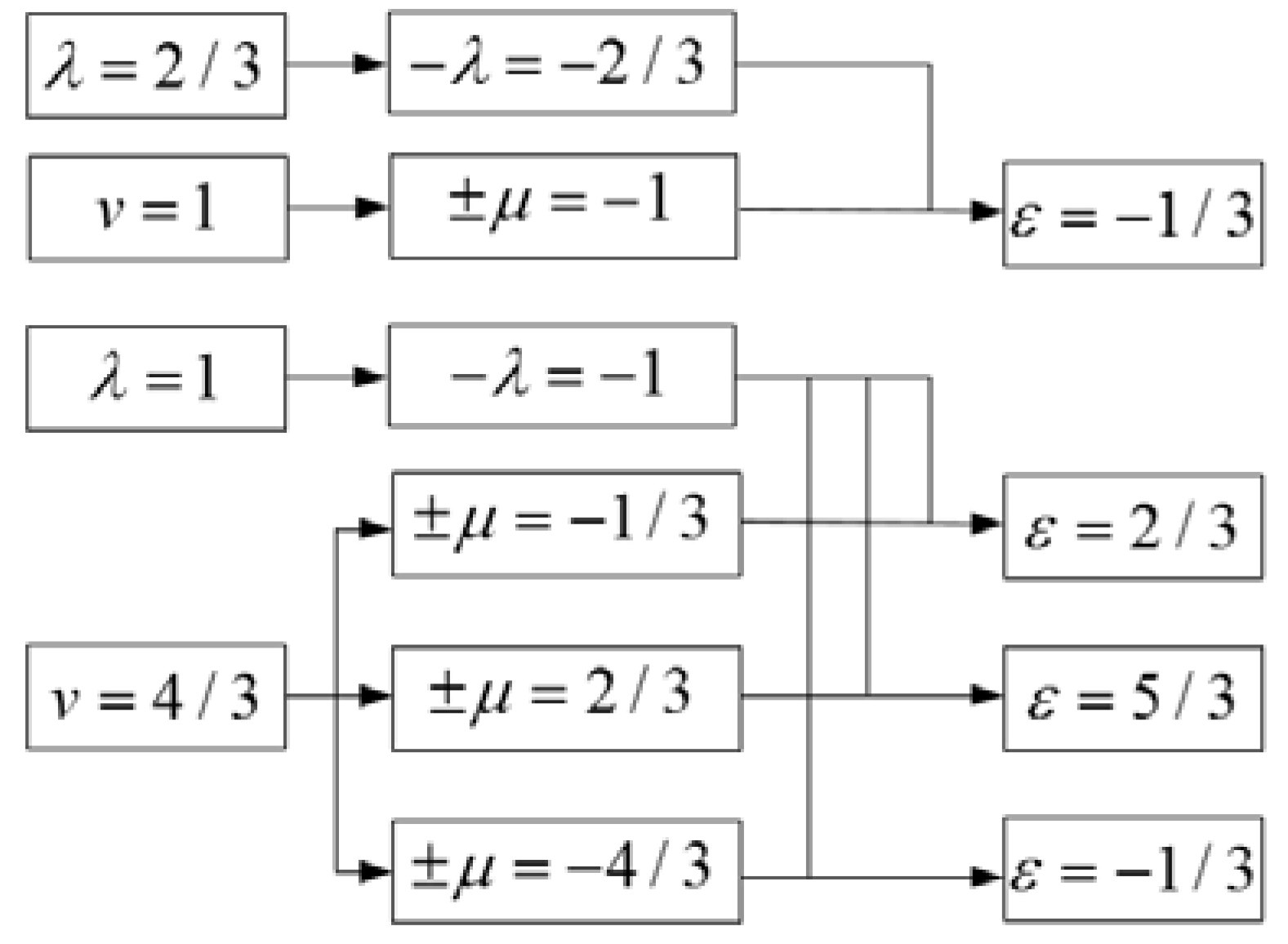
3.1.3. Analysis of Interaction Results of Two Different Kinds of Stator and Rotor Harmonic MMF
3.2. Fault Simulation of Experimental Prototype
3.3. Analysis on Effect of Stator Winding Forms on Rotor UMP
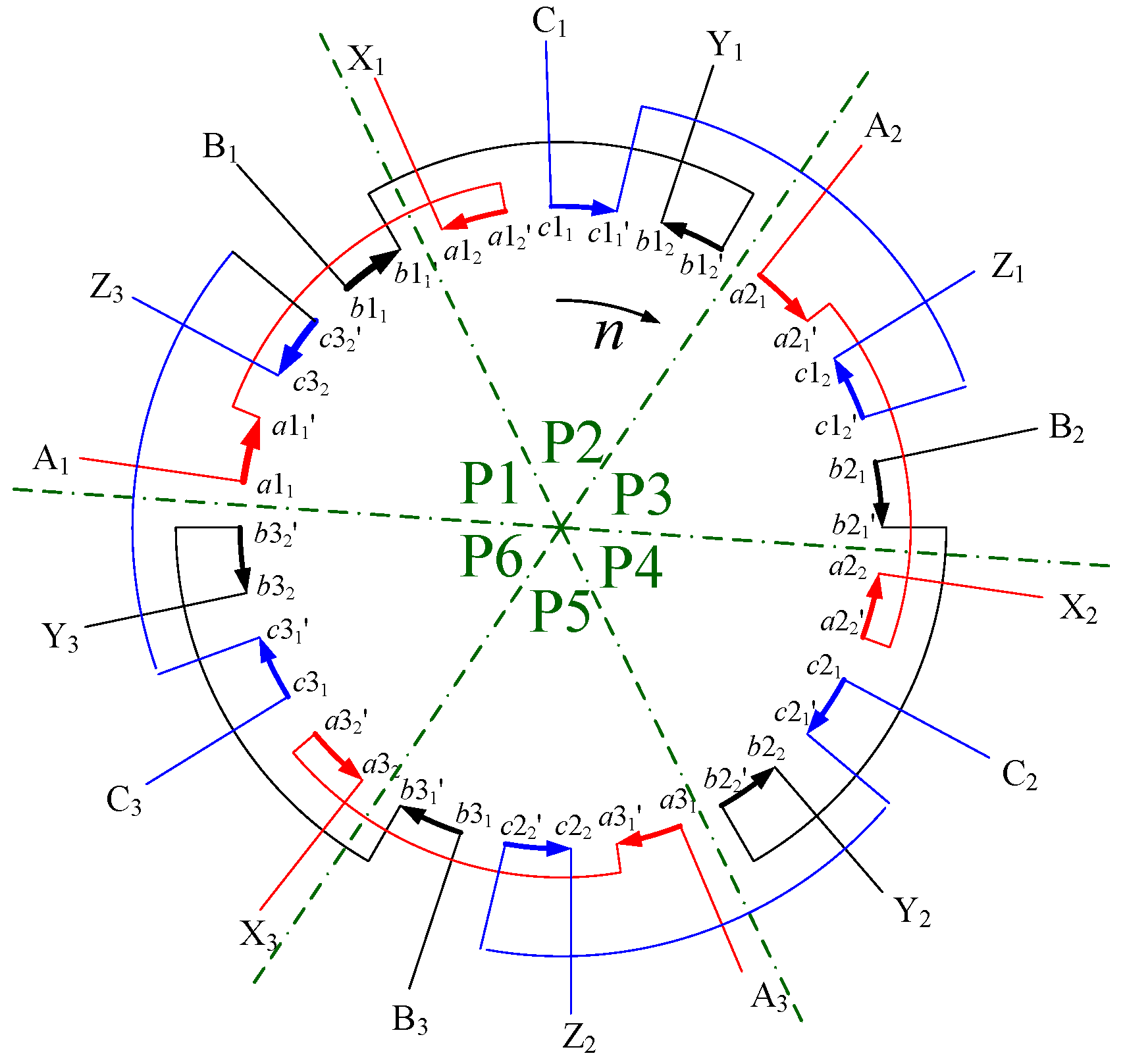
3.3.1. Type A Generator—Stator Winding of Which Spatial Positions Are Fully Symmetrical
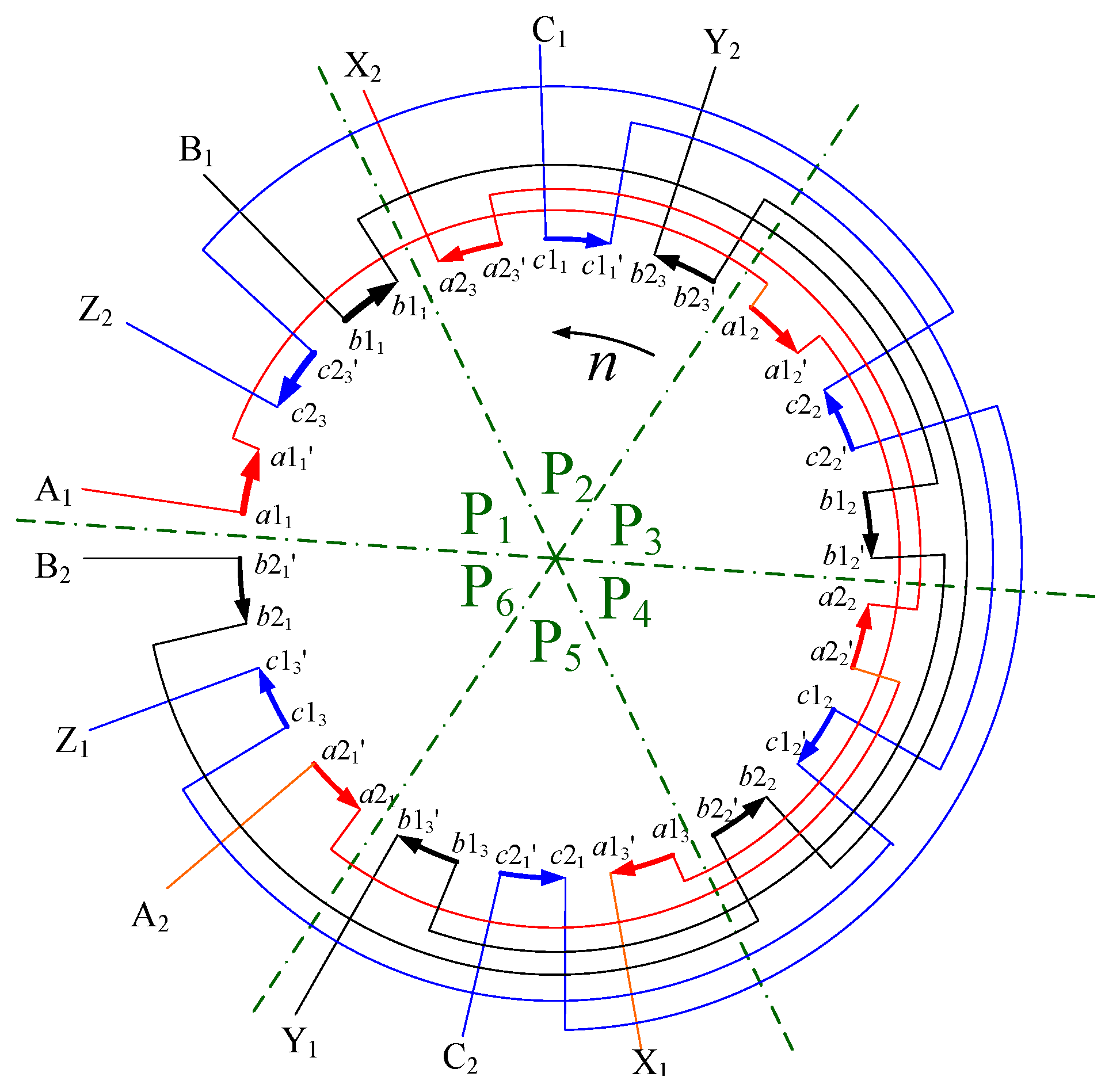
3.3.2. Type B Generator—Stator Winding with Two Branches for Each Phase
3.4. Fault Simulation of Type A and B Generators
- (a)
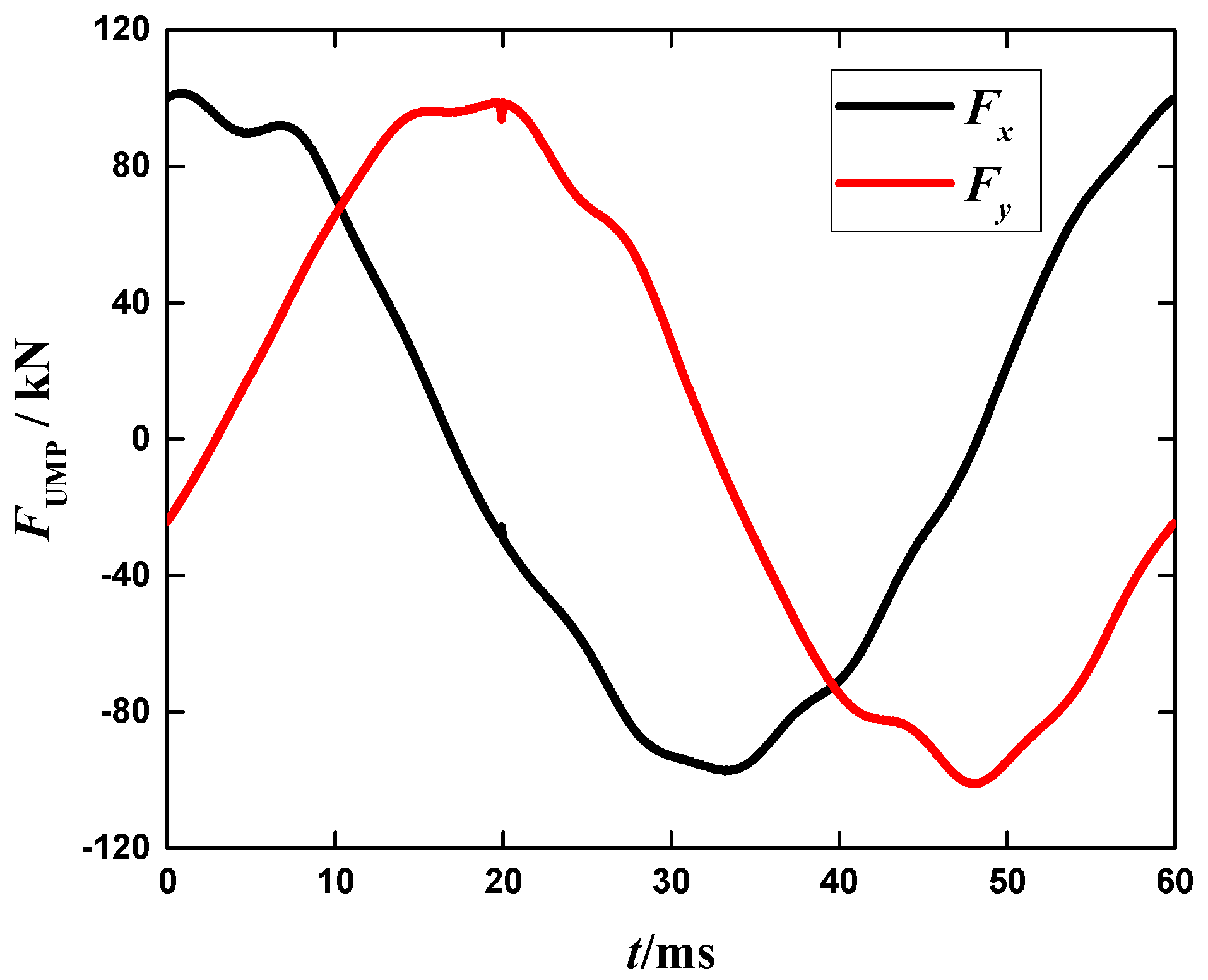
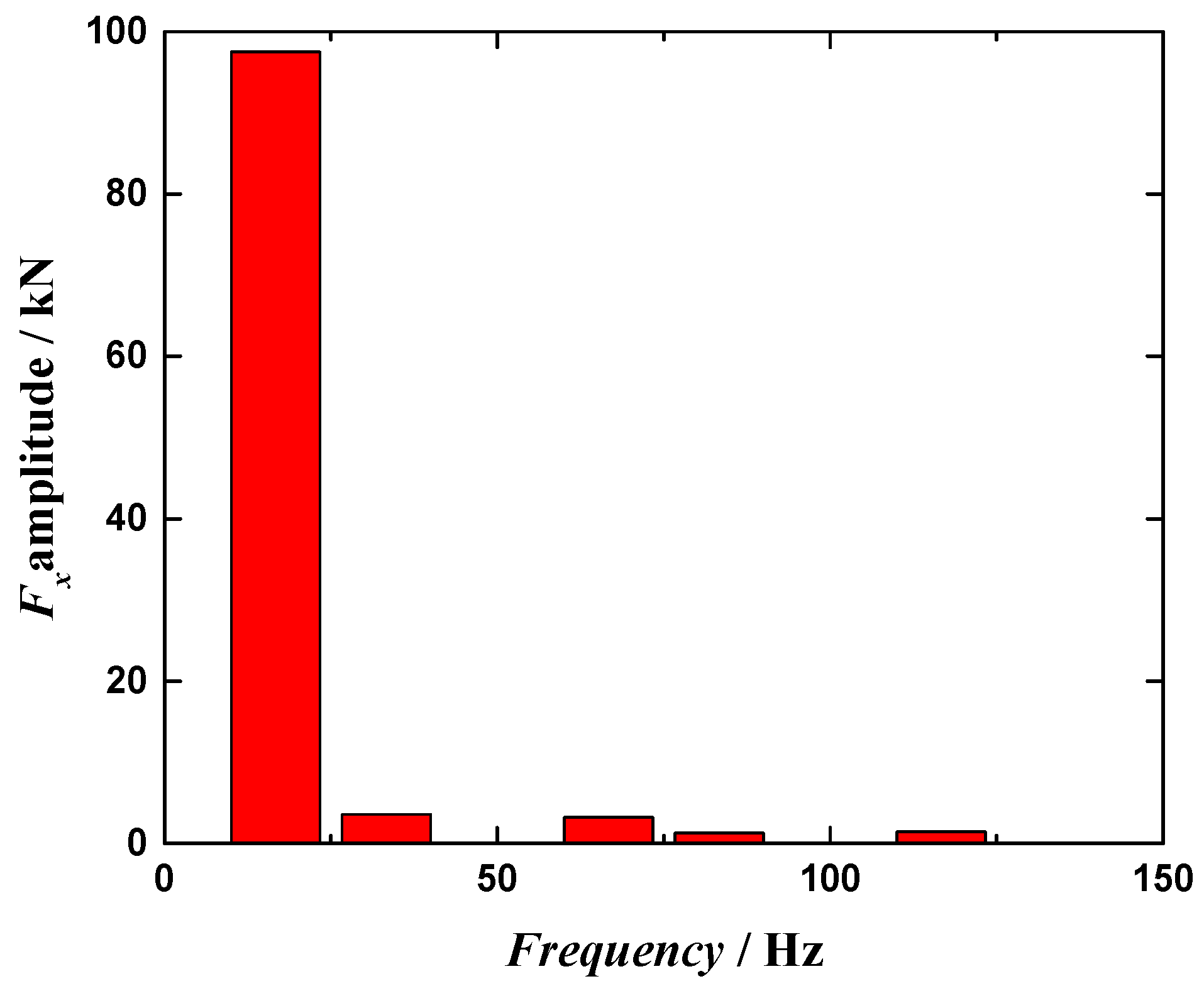
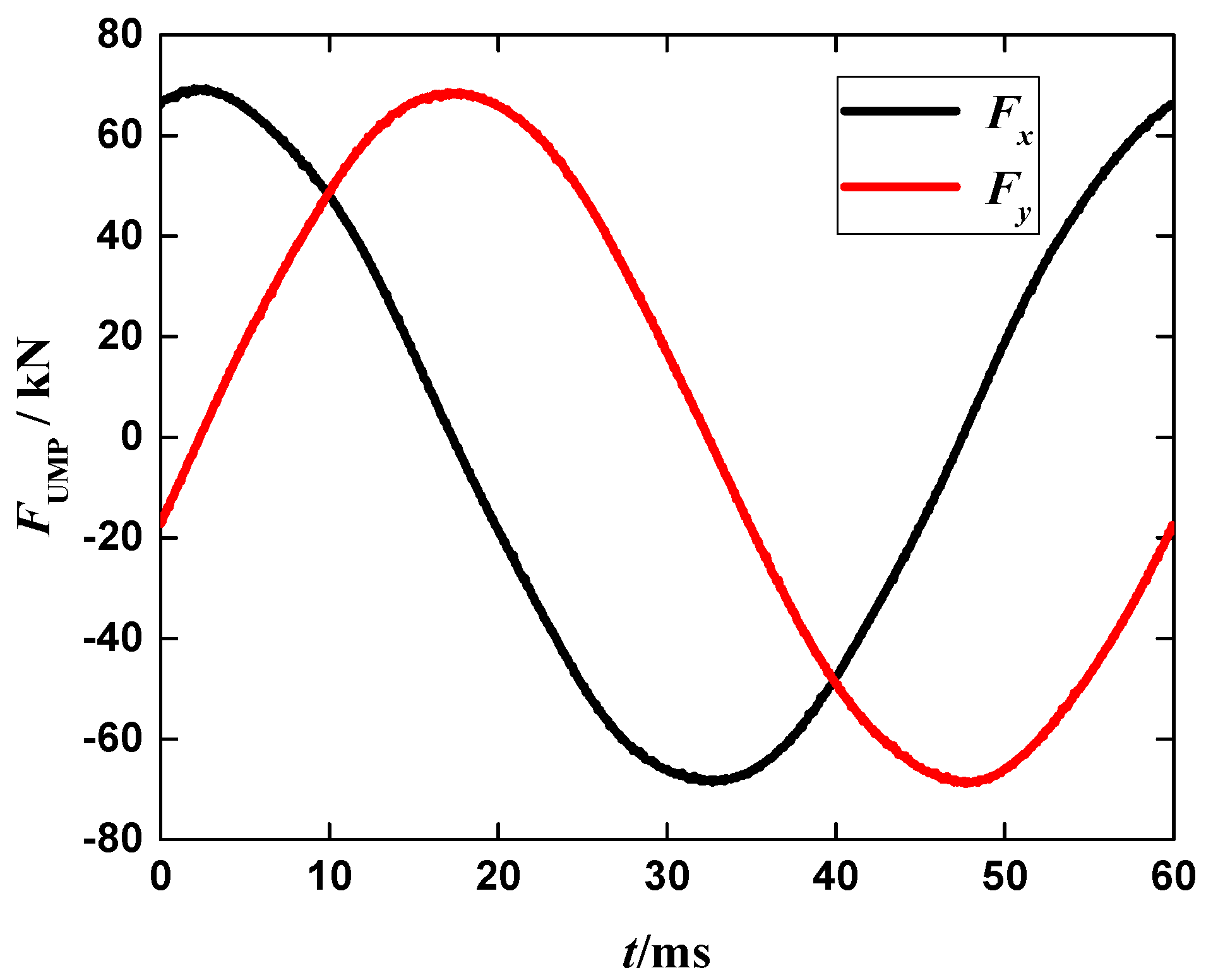
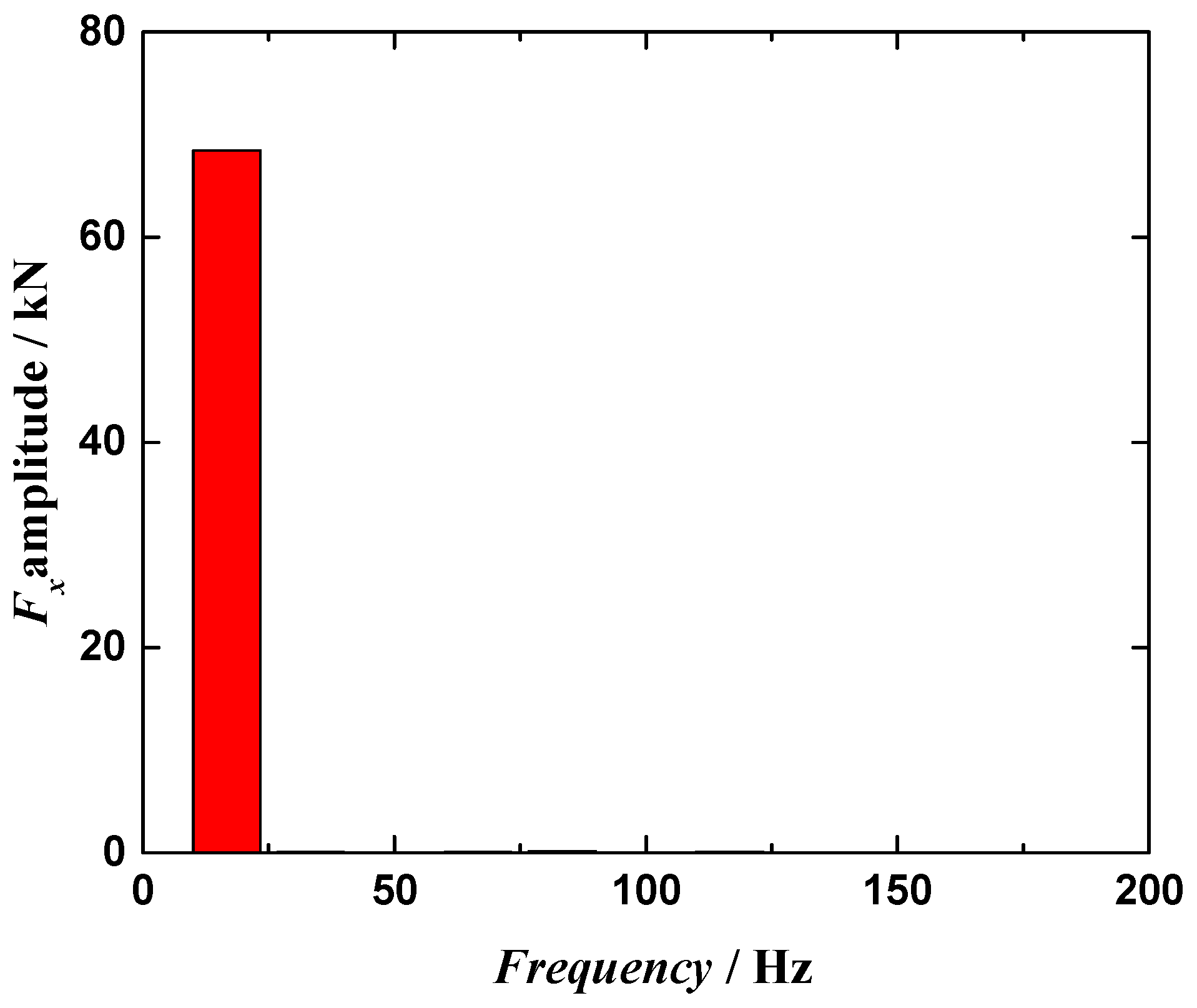
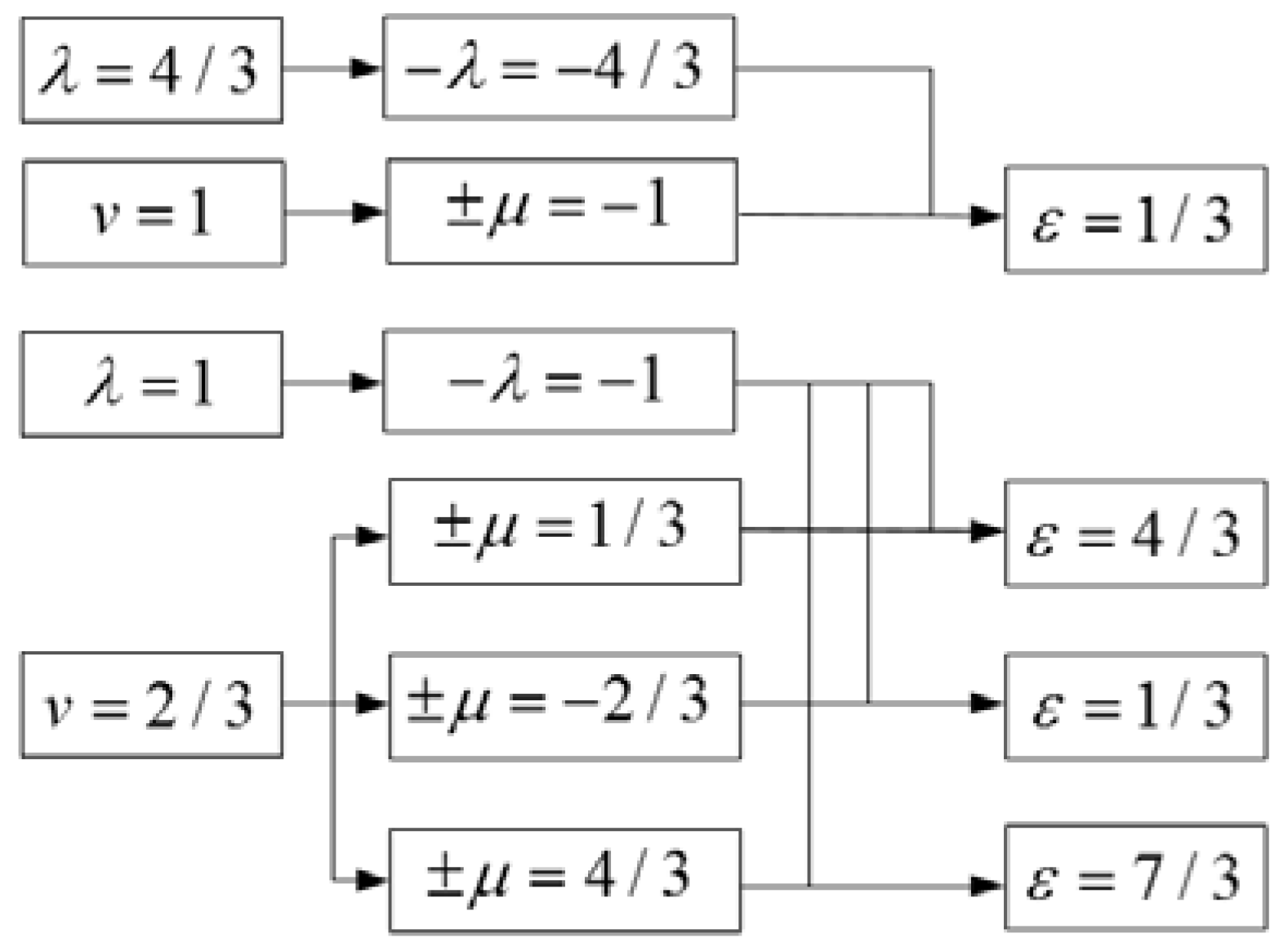
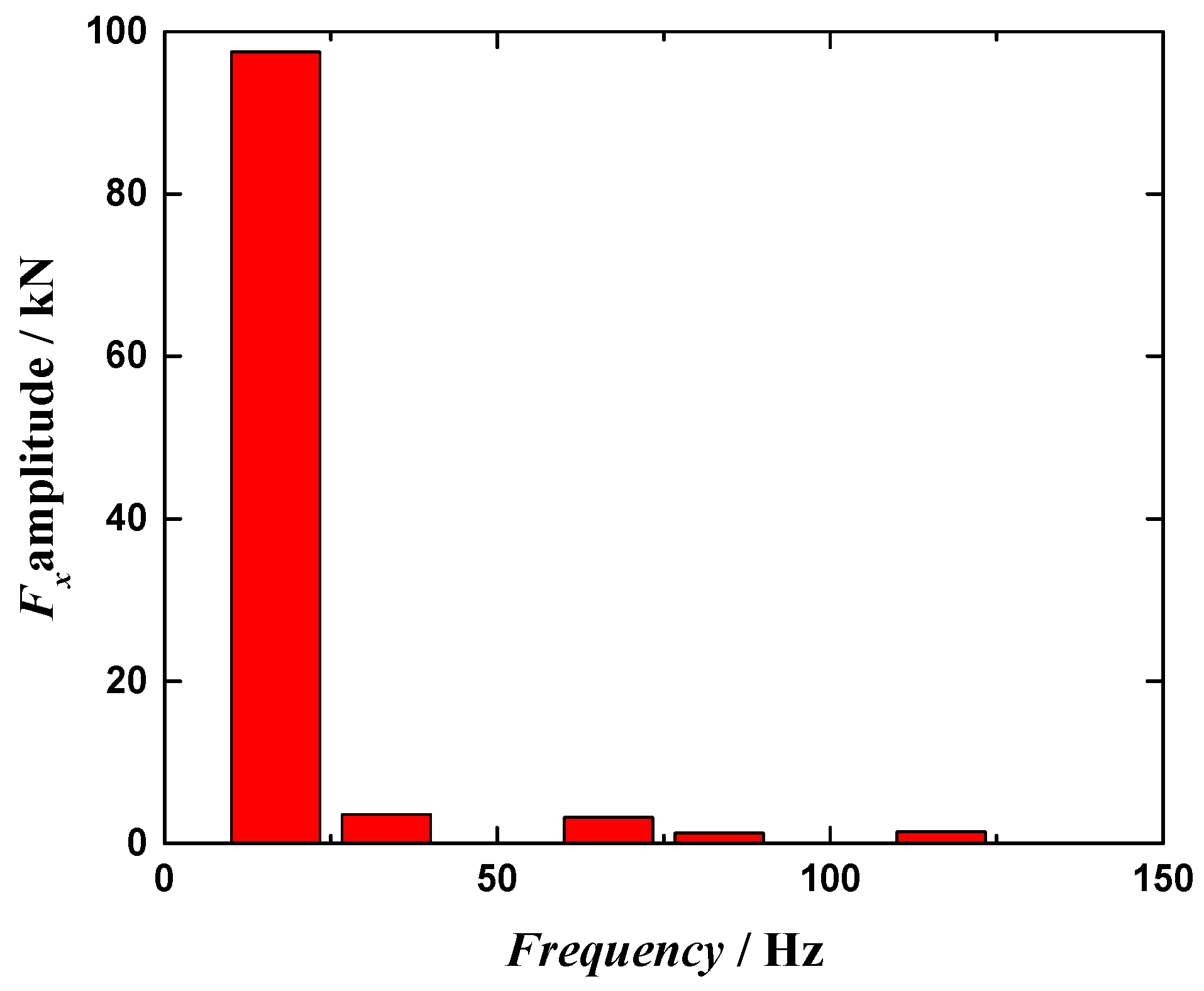
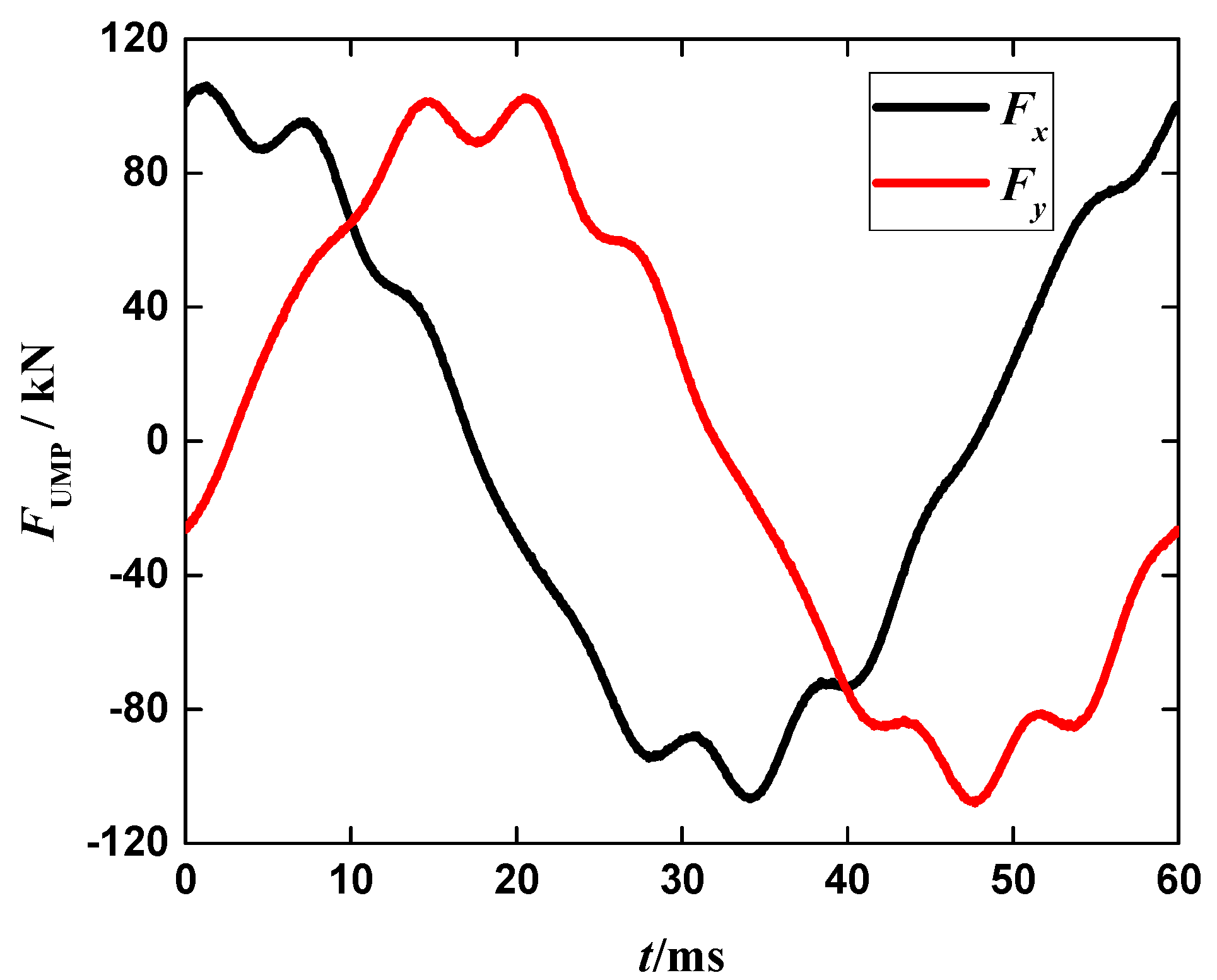
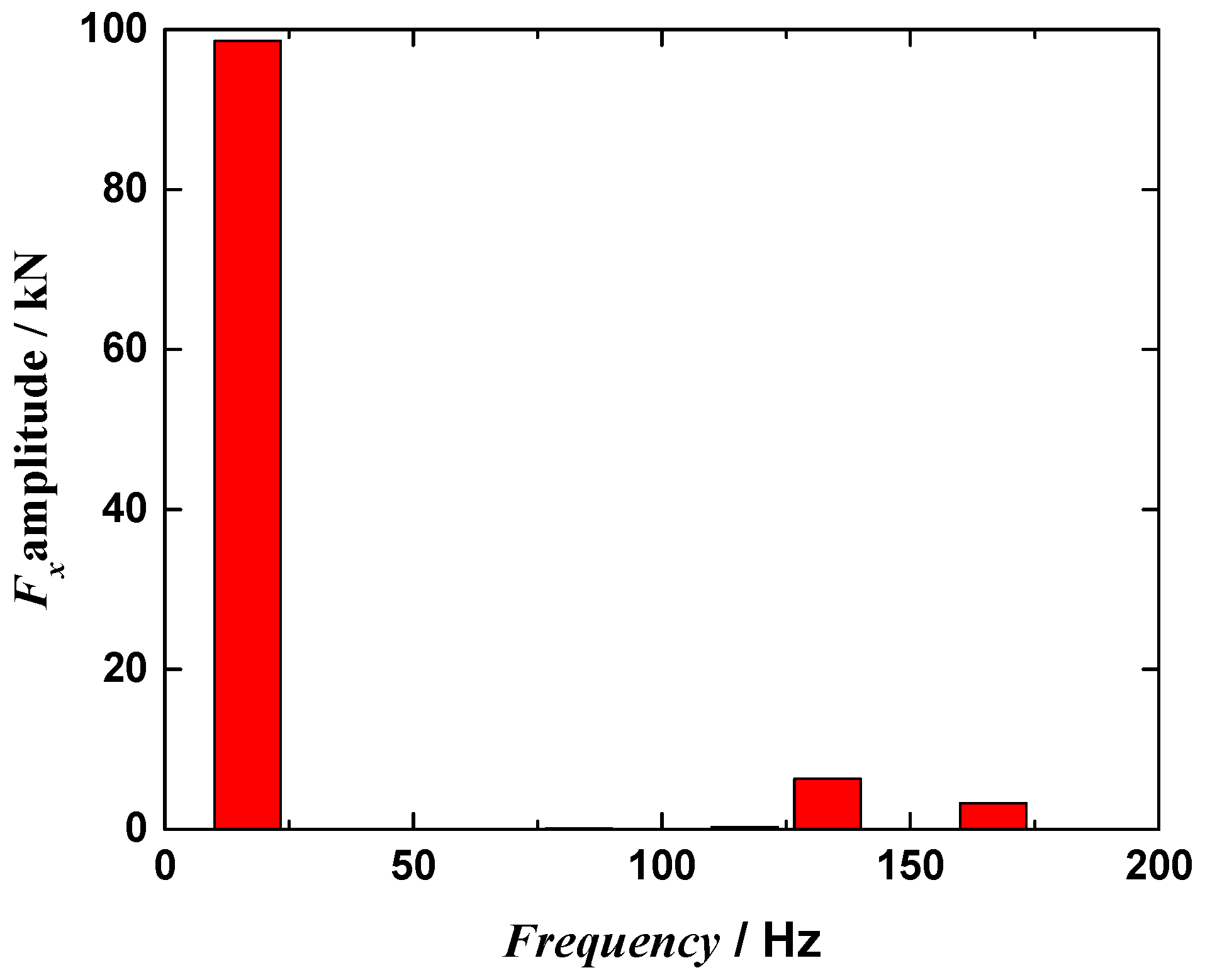
- After the ISCFW occurs in a generator, the force waves in rotor UMP with the same mechanical rotation frequency as the rotor are dominant (1/3-th force waves for experimental prototype A1553), while other force waves are relatively less. The main causes are as follows: firstly, the analysis in Section 2.3 indicates that interaction of any two harmonic MMF can generate a 1/3th force wave but won’t generate all higher-order force waves; secondly, the 1/3-th force wave is mainly generated through interactions of the fundamental MMF in the air gap and the 2/3-th and 4/3-th MMF, and these three MMF are relatively bigger compared to other higher-order harmonic MMFs. Therefore, the 1/3-th force wave of post-fault rotor is apparently bigger than other force waves. In a later section, this paper mainly analyzed 1/3-th force waves for amplitude characteristics, without considering the effect of other higher-order force waves.
- (b)
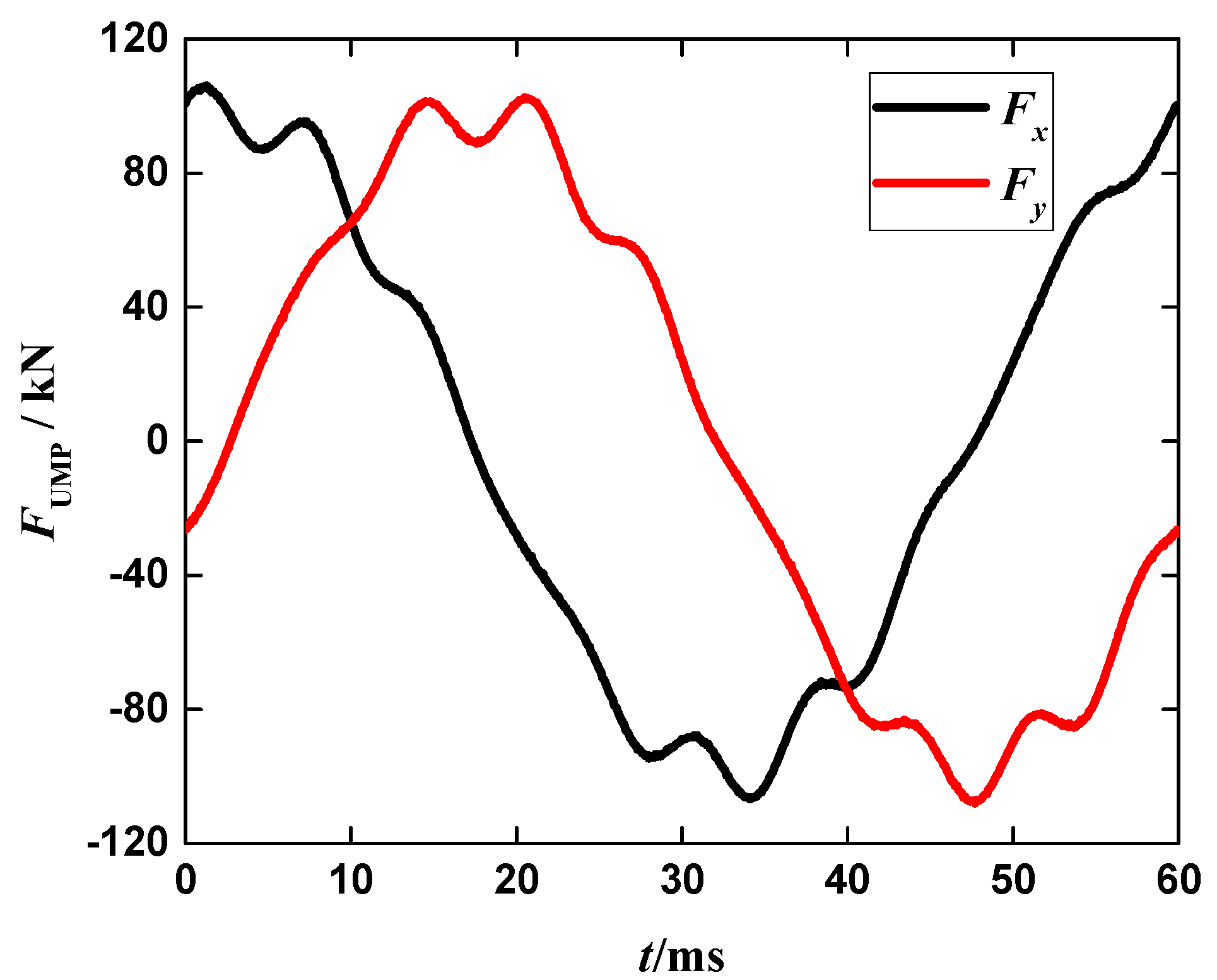
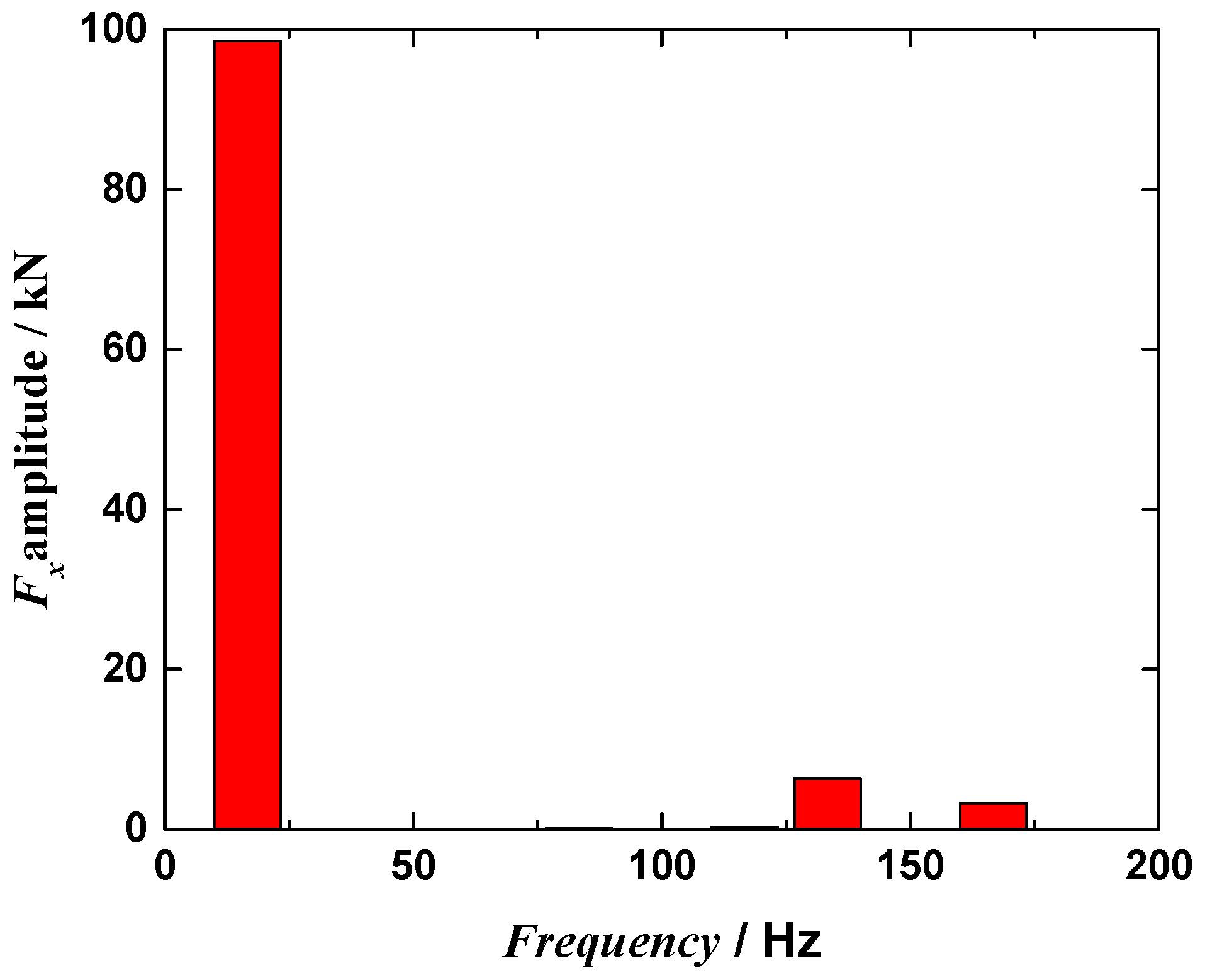
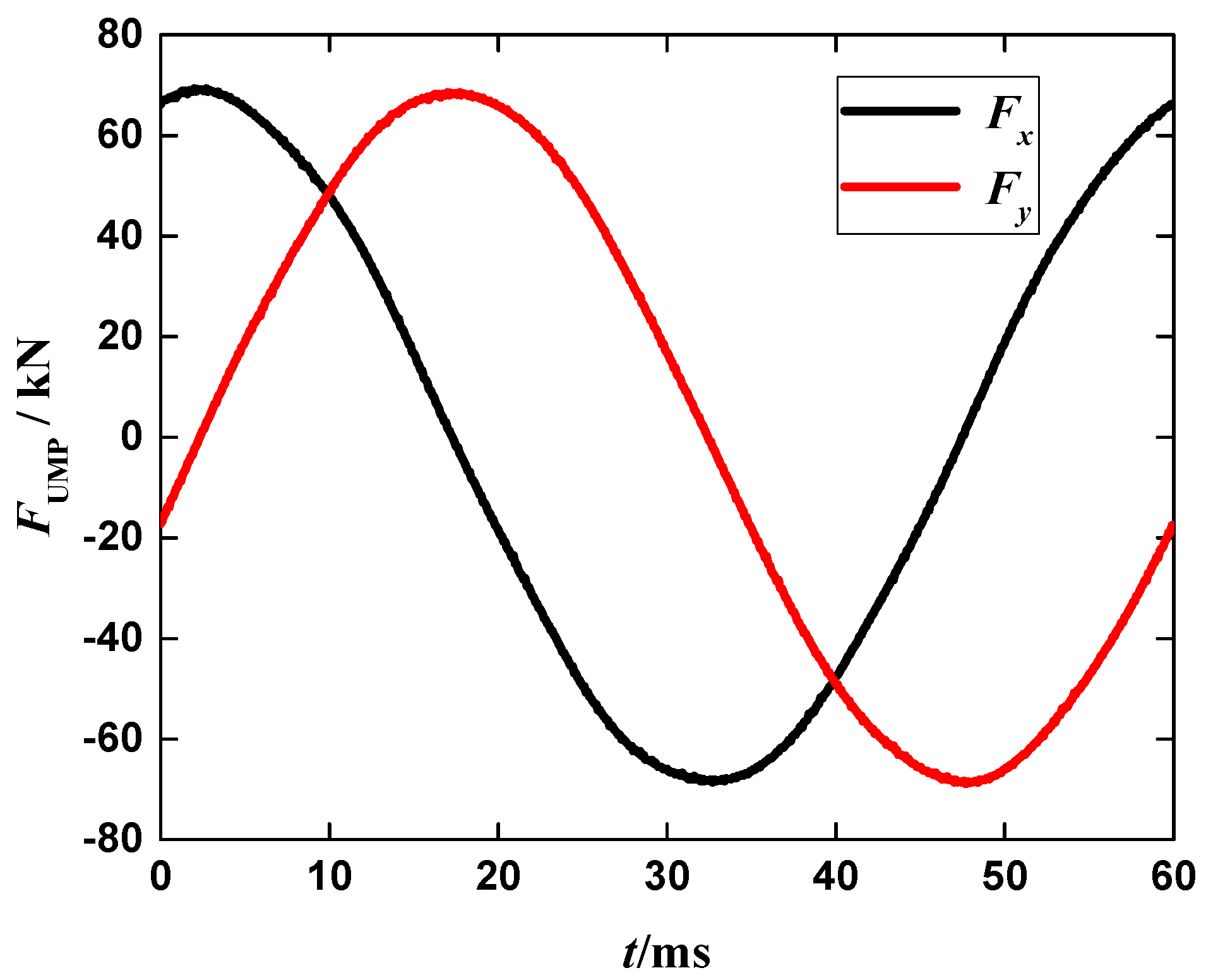
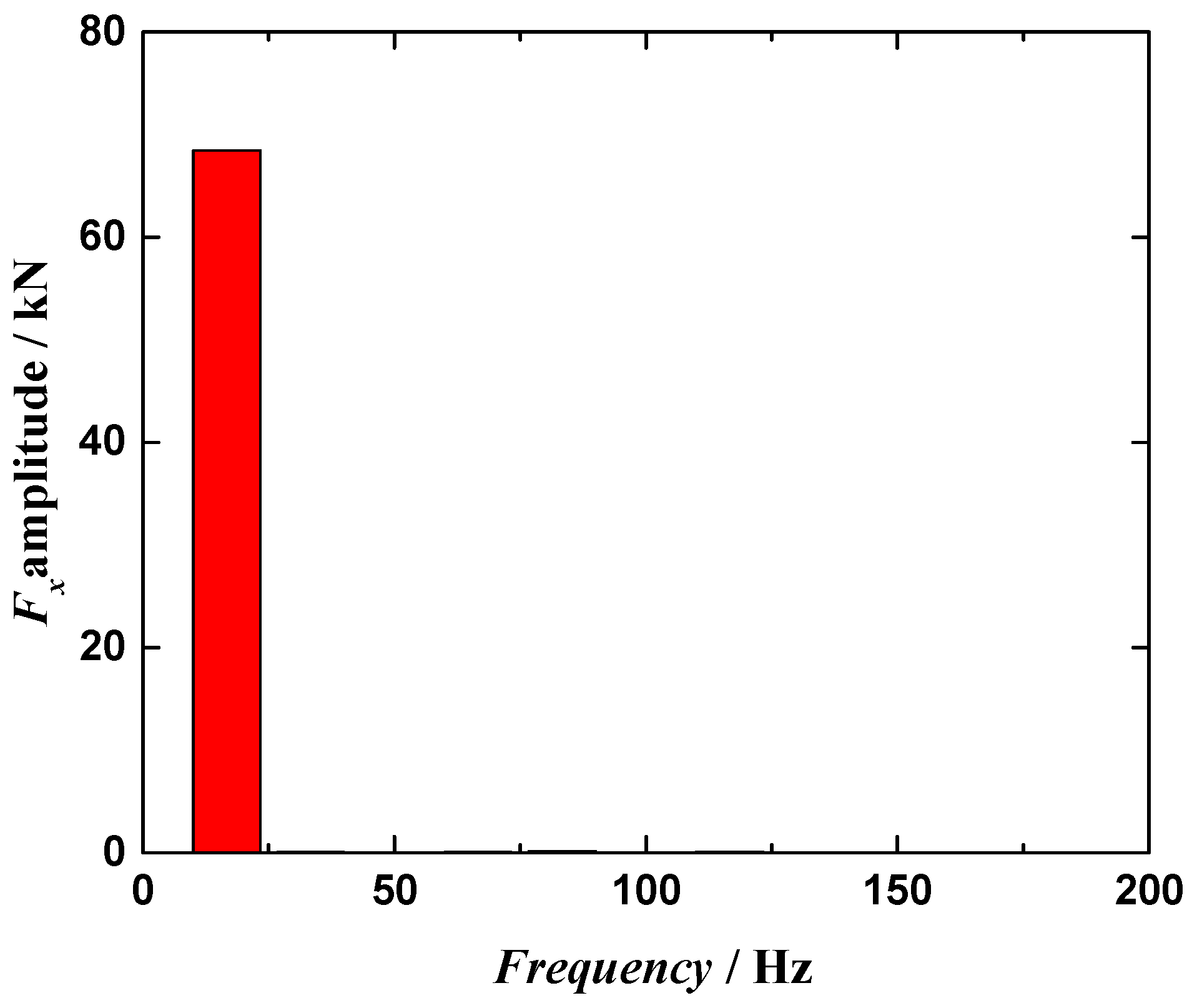
- Under the premise that the number of pole pairs is not changed, the stator winding form has an obvious influence on the frequency characteristics of rotor UMP. The main reason is that the change of stator winding form can result in a corresponding change of stator fault current frequency, which comes with the change of its generated harmonic MMF. Therefore, the rotor UMP of generator with different winding forms after fault has different frequency characteristics.
4. Amplitude Characteristics Analysis of Rotor UMP
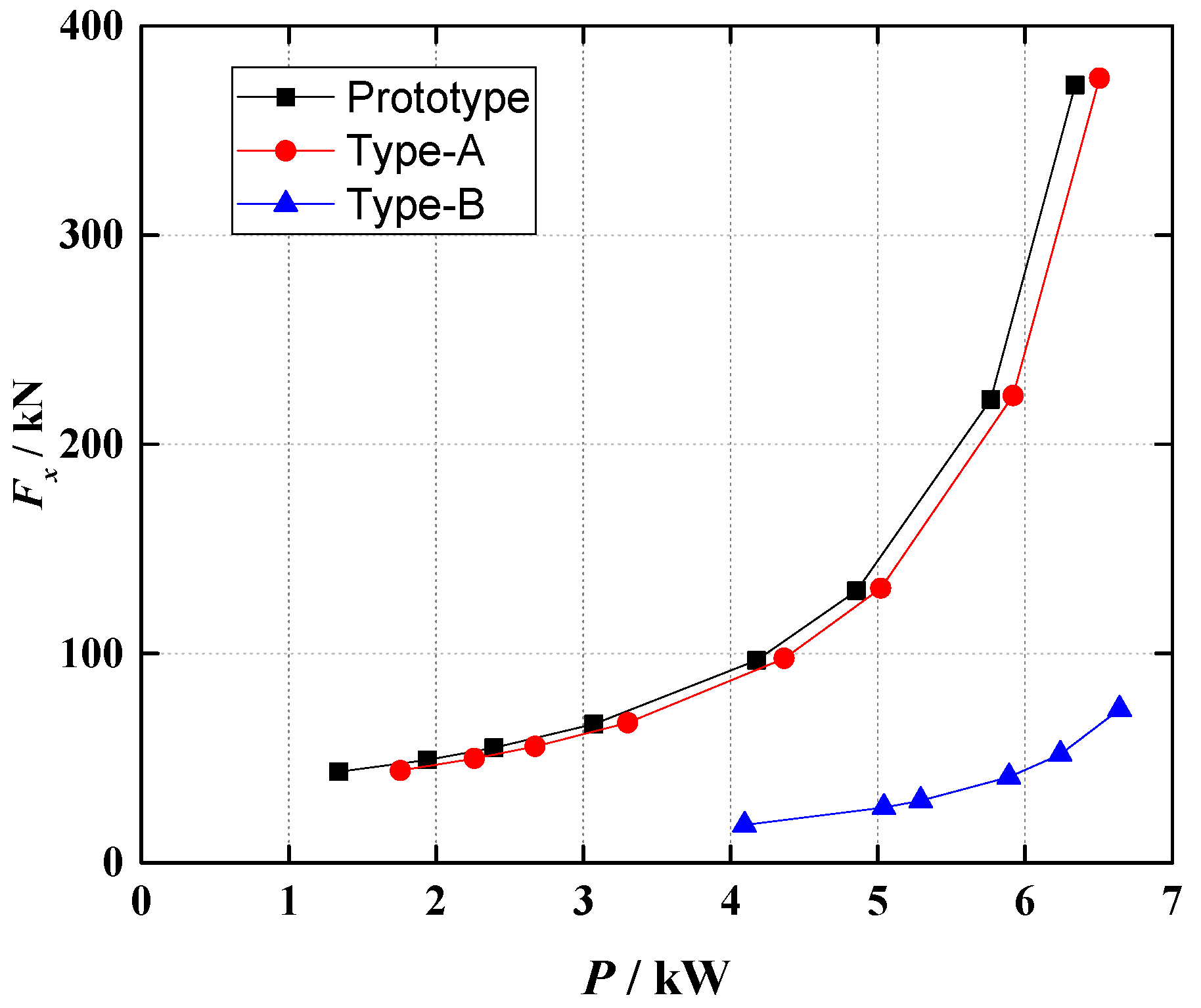
4.1. Effect of Active Power on Rotor UMP Amplitude
4.1.1. Simulation on Rotor UMP of Generator with Different Active Output Power
4.1.2. Analysis of Simulation Results
4.2. Effect of Field Current on the Rotor UMP Amplitude
4.2.1. Simulation of the Generator Rotor UMP with Different Field Current
4.2.2. Analysis of Simulation Results
5. Conclusions
- (1)
- After ISCFW, the force wave in the generator rotor UMP which has the same frequency as that of the rotor mechanical rotation, is the main component, and other harmonic waves are relatively small. The change of stator winding form will cause the variation of air gap harmonic MMF so as to have a significant effect on frequency characteristics of the rotor UMP.
- (2)
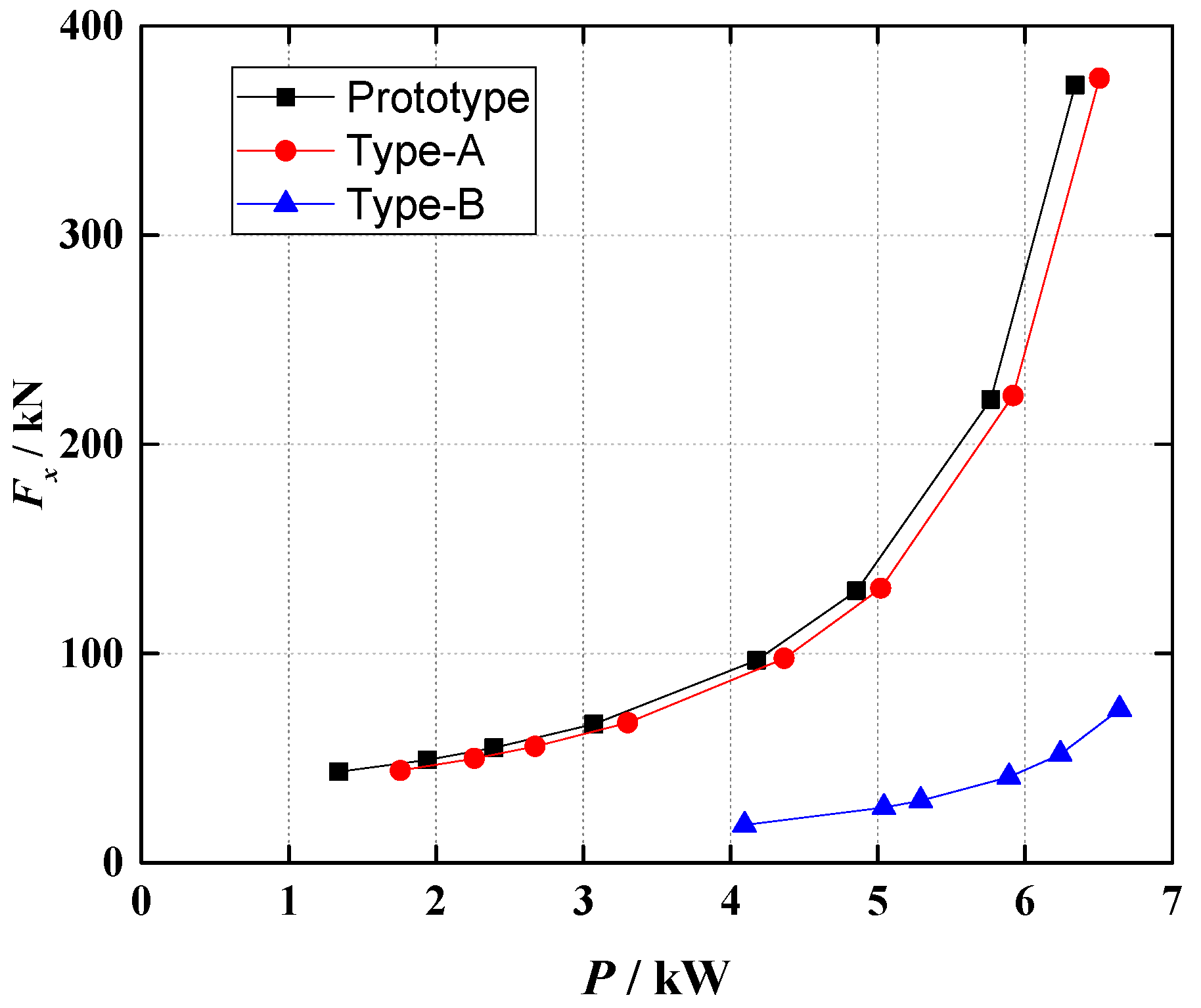
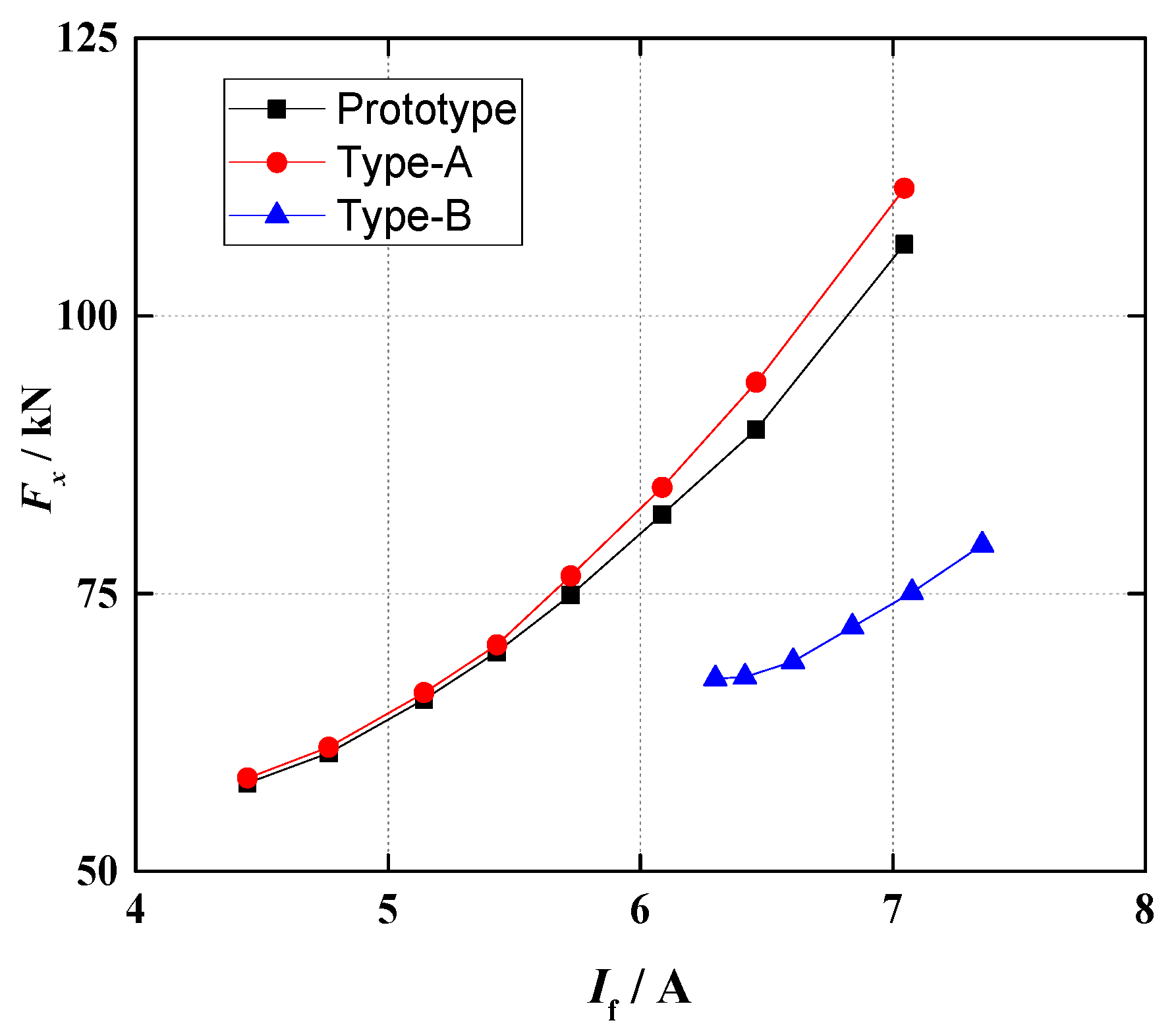
- Under the premise of constant field current, the amplitude and change rate of the generator rotor UMP increases along with increasing active power; on the basis of constant active power, the amplitude and change rate of the generator rotor UMP also increase along with increasing field current. The stator winding form only affects the amplitudes of the rotor UMP after a fault, but has no obvious effect on the relationship between amplitudes and working conditions of the generator.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Li, Y.G.; Zhao, H.; Li, H.M. The new method on rotor winding inter turn short-circuit fault measure of turbine generator. In Proceedings of the 2003 IEEE International Electric Machines and Drives Conference, Madison, WI, USA, 1–4 June 2003; pp. 1483–1487. [Google Scholar]
- Hao, L.L.; Wu, J.Y.; Zhou, Y.Z. Theoretical Analysis and Calculation Model of the Electromagnetic Torque of Non-salient Pole Synchronous Machines with Inter-turn Short Circuit in Field Windings. IEEE Trans. Energy Convers. 2015, 30, 110–121. [Google Scholar] [CrossRef]
- Faiz, J.; Moosavi, S.M.M.; Abadi, M.B.; Cruz, S.M.A. Magnetic equivalent circuit modelling of doubly-fed induction generator with assessment of rotor inter-turn short-circuit fault indices. IET Renew. Power Gener. 2016, 10, 1431–1440. [Google Scholar] [CrossRef]
- Naderi, P.; Shiri, A. Rotor/Stator Inter-Turn Short Circuit Fault Detection for Saturable Wound-Rotor Induction Machine by Modified Magnetic Equivalent Circuit Approach. IEEE Trans. Magn. 2017, 53. [Google Scholar] [CrossRef]
- Jawad, F.; Mehran, K.; Mahmud, G.; Sérgio, M. Impacts of rotor inter-turn short circuit fault upon performance of wound rotor induction machines. Electr. Power Syst. Res. 2016, 135, 48–58. [Google Scholar]
- Yuan, Q.; Mohsen, Z.; Bilal, A.; Stephen, E. Analysis and Detection of Inter-Turn Short-Circut Fault through Extended Self-Commissioning. IEEE Trans. Ind. Appl. 2017, 53, 2730–2739. [Google Scholar]
- Ramirez-Nino, J.; Pascacio, A. Detecting inter-turn short circuits in rotor windings. IEEE Comput. Appl. Power 2001, 14, 39–42. [Google Scholar] [CrossRef]
- Fiser, R.; Makuc, D.; Lavriě, H.; Miljavec, D.; Bugeza, M. Modeling, analysis and detection of rotor field winding faults in synchronous generators. In Proceedings of the 19th International Conference on Electrical Machines, Rome, Italy, 6–8 September 2010; pp. 1–6. [Google Scholar]
- Guttormsson, S.E.; Marks, R.J.; Ei-Sharkawi, M.A. Elliptical novelty grouping for on-line short-turn detection of excited running rotors. IEEE Trans. Energy Convers. 1999, 14, 16–22. [Google Scholar] [CrossRef]
- Kulkarni, A.S.; Ei-Sharkawi, M.; Marks, R.J. Development of a technique for on-line detection of shorts infield windings of turbine-generator rotors circuit design and testing. IEEE Trans. Energy Convers. 2000, 15, 8–13. [Google Scholar]
- Hao, L.L.; Sun, Y.G.; Qiu, A.R.; Wang, X.H. Steady-State Calculation and Online Monitoring of Inter-turn Short Circuit of Field Windings in Synchronous Machines. IEEE Trans. Energy Convers. 2012, 27, 128–138. [Google Scholar] [CrossRef]
- Neti, P.; Nandi, S. Analysis and modeling of a synchronous machine with structural asymmetries. In Proceedings of the 2006 IEEE Conference on Electrical and Computer Engineering, Ottawa, ON, Canada, 7–10 May 2006; pp. 1236–1239. [Google Scholar]
- Hao, L.L.; Sun, Y.G.; Qiu, A.R. Monitoring of field winding inter-turn short circuit based on unbalanced current effective value in main protection. Autom. Electr. Power Syst. 2011, 35, 83–87. [Google Scholar]
- Sun, Y.G.; Wang, B.H.; Xu, W.; Jiang, C.S. Online monitoring of excitation winding inter-turn short circuit of generator/motor. Electr. Power Autom. Equip. 2017, 37, 211–217. [Google Scholar]
- Zhang, Z.P.; Liu, S. On-line diagnosis of inter-turn short circuit for large turbine generator’s rotor. Electr. Power Autom. Equip. 2012, 32, 148–152. [Google Scholar]
- He, Y.L.; Ke, M.Q.; Wang, F.L.; Tang, G.J.; Wan, S.T. Effect of Static Eccentricity and Stator Inter-Turn Short Circuit Composite Fault on Rotor Vibration Characteristics of Generator. Trans. Can. Soc. Mech. Eng. 2015, 39, 767–781. [Google Scholar]
- Zhang, G.Y.; Wei, J.C.; Huang, H.Z.; Zhou, M. A study on the nonlinear vibration of the generator rotor based on the unbalanced electromagnetic force and the oil film force coupling model. J. Vibroeng. 2013, 15, 23–26. [Google Scholar]
- Wu, Y.C.; Li, Y.G.; Feng, W.Z.; Zhang, W.J. Analysis on unbalanced magnetic pull generated by turn-to-turn short circuit of rotor windings within turbine generator. Electr. Mach. Control 2015, 19, 37–44. [Google Scholar]
- Zhang, G.T.; Wu, J.Y.; Hao, L.L. Fast Calculation Model and Theoretical Analysis of Rotor Unbalanced Magnetic Pull for Inter-Turn Short Circuit of Field Windings of Non-Salient Pole Generators. Energies 2017, 10, 732. [Google Scholar] [CrossRef]
- Hao, L.L.; Sun, Y.G.; Qiu, A.R.; Wang, X.H. Effects of Stator Winding Configurations on Steady-state Currents Characteristics of Synchronous Generator with Inter-turn Short Circuits of Field Windings. Proc. CSEE 2011, 31, 61–68. [Google Scholar]
- Li, Y.; Hao, L.L.; Sun, Y.G. The Analysis of UMP Caused by Non-salient Pole Synchronous Generator Rotor Winding Inter-turn Short Circuit Fault. Autom. Electr. Power Syst. 2016, 40, 81–89. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order of Harmonics of Stator Branch μ | Number of Space Rotation MMF ν | |
|---|---|---|
| Rotate Clockwise | Rotate Anticlockwise | |
| 1/3 | 1/3,4/3 | 2/3,5/3 |
| 2/3 | 2/3,5/3 | 1/3,4/3 |
| 1 | 1 | - |
| 4/3 | 1/3,4/3 | 2/3,5/3 |
| Rated power PN = 12 kW; | Rated power factor cosφN = 0.8 (lagged) |
| Rated voltage UN = 400 V(Y); | Rated frequency fN = 50 Hz; |
| Air gap length δ = 1.5 mm | Number of pole pairs P = 3 |
| Rated field current IfdN = 16 A | Rated speed nN = 1000 r/min |
| Slot number of stator Z = 72 | Coil pitch of stator ys = 10 (number of slots) |
| Slot number of stator for each pole and each phase q = 4 | Number of parallel branches for each phase of stator a = 3 |
| Number of series turns for each pole of field winding is 123 | Number of parallel branches for field winding is 1 |
| Number of Stator Branch Harmonics μ | Number of Spatial Rotation MMF ν | |
|---|---|---|
| Rotate Clockwise | Rotate Anticlockwise | |
| 1/3 | 1/3 | 8/3 |
| 2/3 | 2/3 | 7/3 |
| 1 | 1 | - |
| 4/3 | 4/3 | 5/3 |
| Number of Stator Branch Harmonics μ | Number of Spatial Rotation MMF ν | |
|---|---|---|
| Rotate Clockwise | Rotate Anticlockwise | |
| 1 | 1 | - |
| 2 | 2 | 4 |
| 4 | 4 | 2 |
| a3 Fundamental Current (A) | If (A) | Active Power (kW) | Fx (kN) | |
|---|---|---|---|---|
| 6.59 | 0.99 | 6.69 | 6.34 | 371.82 |
| 6.02 | 0.96 | 6.69 | 5.77 | 221.38 |
| 5.11 | 0.72 | 6.69 | 4.86 | 129.93 |
| 4.44 | 0.45 | 6.69 | 4.18 | 96.66 |
| 3.38 | −0.09 | 6.69 | 3.07 | 66.22 |
| 2.75 | −0.48 | 6.69 | 2.39 | 54.90 |
| 2.36 | −0.73 | 6.69 | 1.94 | 49.17 |
| 1.88 | −0.98 | 6.69 | 1.34 | 43.43 |
| Field Current (A) | Active Power (kW) | UMP (kN) |
|---|---|---|
| 7.05 | 4.24 | 106.45 |
| 6.46 | 4.24 | 89.78 |
| 6.09 | 4.24 | 82.12 |
| 5.73 | 4.24 | 75.83 |
| 5.43 | 4.24 | 69.73 |
| 5.14 | 4.24 | 65.48 |
| 4.77 | 4.24 | 60.65 |
| 4.44 | 4.24 | 57.93 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, G.; Wu, J.; Hao, L. Analysis on the Amplitude and Frequency Characteristics of the Rotor Unbalanced Magnetic Pull of a Multi-Pole Synchronous Generator with Inter-Turn Short Circuit of Field Windings. Energies 2018, 11, 60. https://doi.org/10.3390/en11010060
Zhang G, Wu J, Hao L. Analysis on the Amplitude and Frequency Characteristics of the Rotor Unbalanced Magnetic Pull of a Multi-Pole Synchronous Generator with Inter-Turn Short Circuit of Field Windings. Energies. 2018; 11(1):60. https://doi.org/10.3390/en11010060
Chicago/Turabian StyleZhang, Guangtao, Junyong Wu, and Liangliang Hao. 2018. "Analysis on the Amplitude and Frequency Characteristics of the Rotor Unbalanced Magnetic Pull of a Multi-Pole Synchronous Generator with Inter-Turn Short Circuit of Field Windings" Energies 11, no. 1: 60. https://doi.org/10.3390/en11010060