Design Method for the Coil-System and the Soft Switching Technology for High-Frequency and High-Efficiency Wireless Power Transfer Systems


Abstract
:1. Introduction
2. Theoretical Analysis of the WPT System
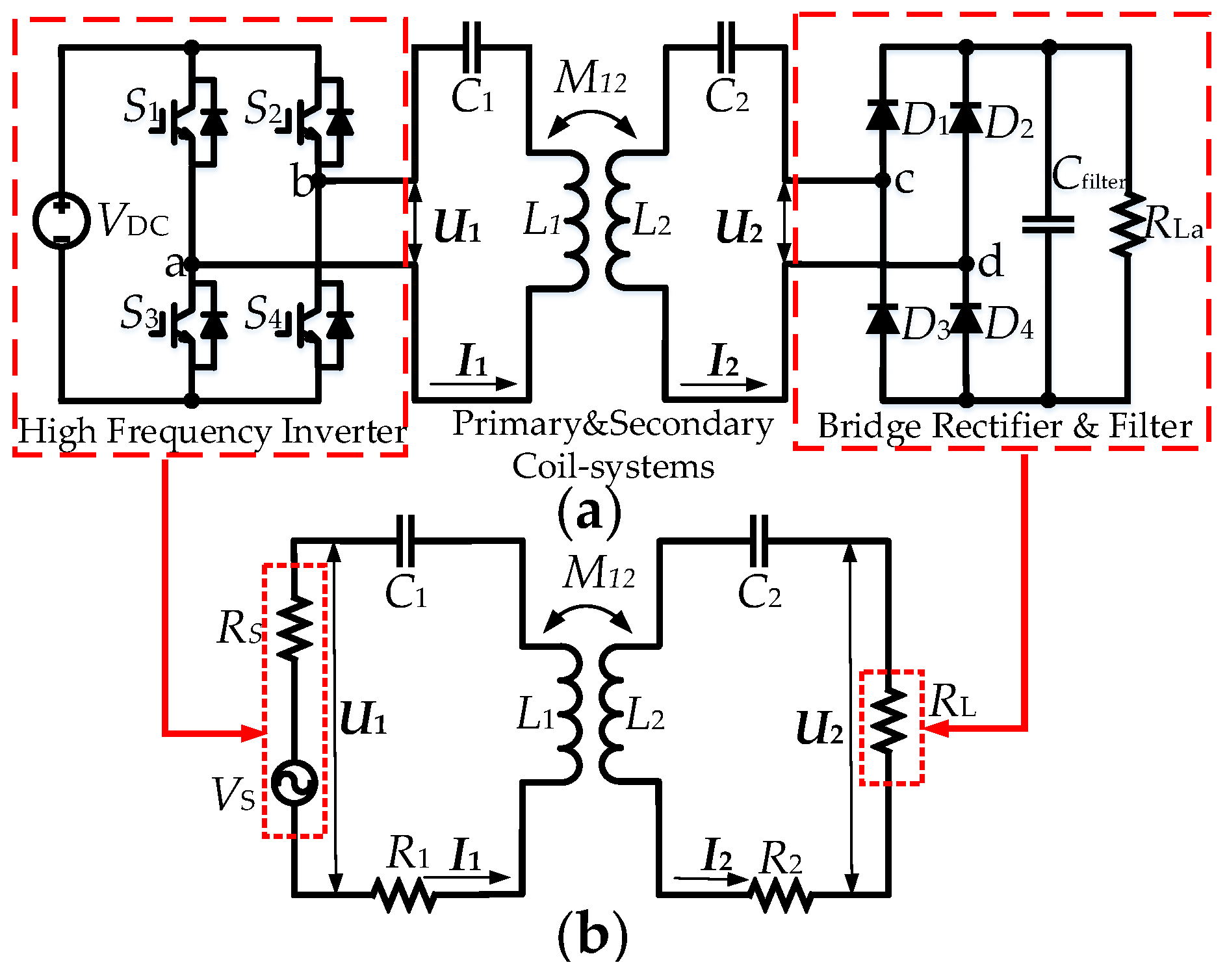
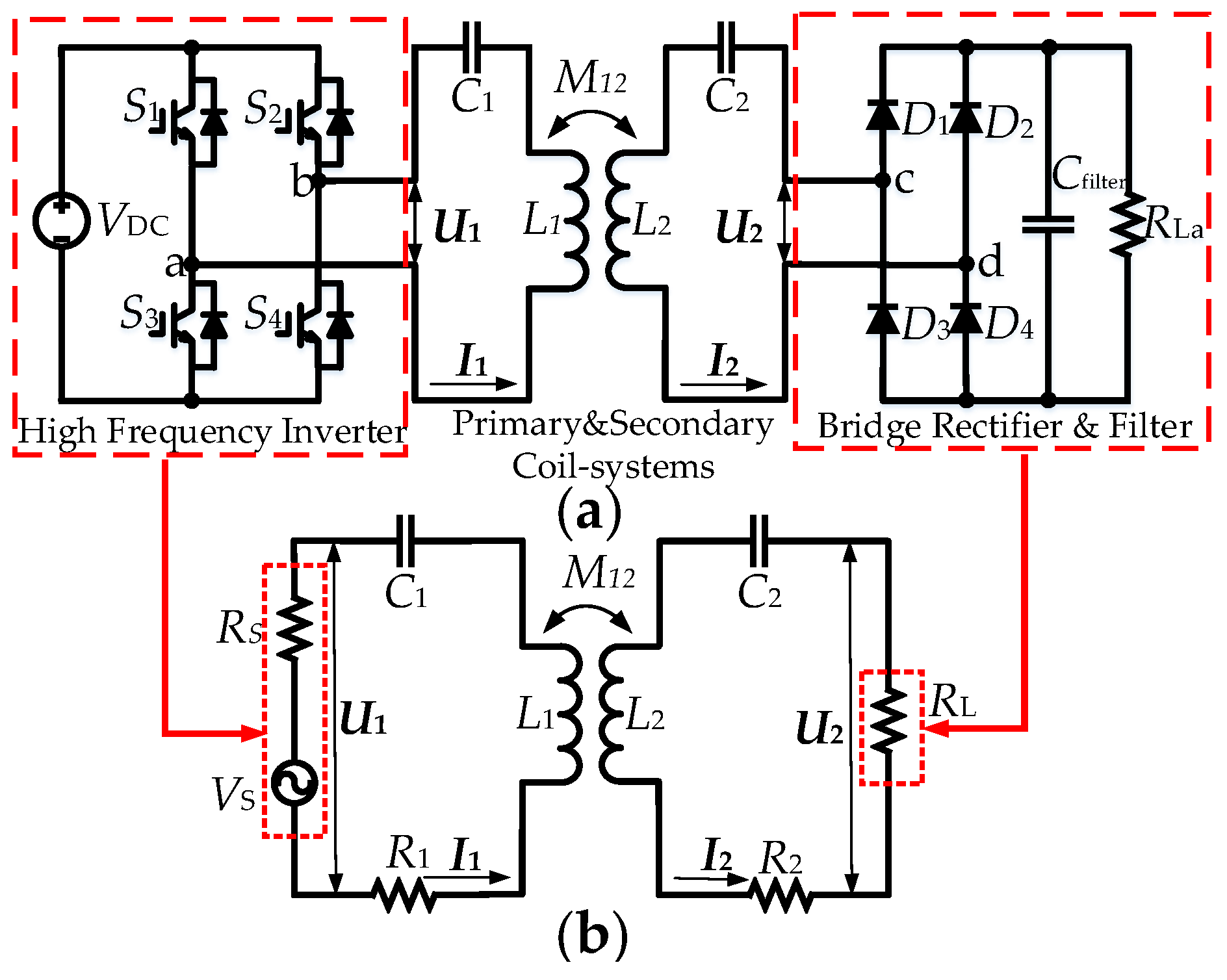
2.1. Circuit Model of Two-Coil WPT-System
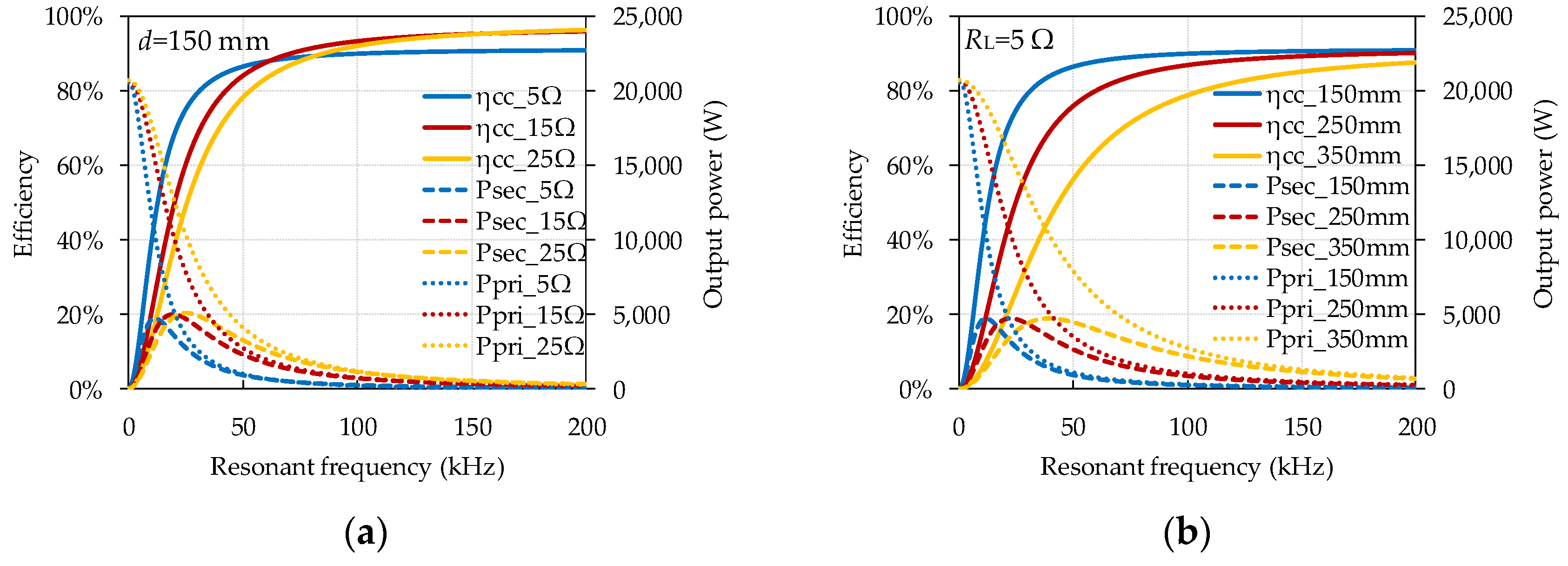
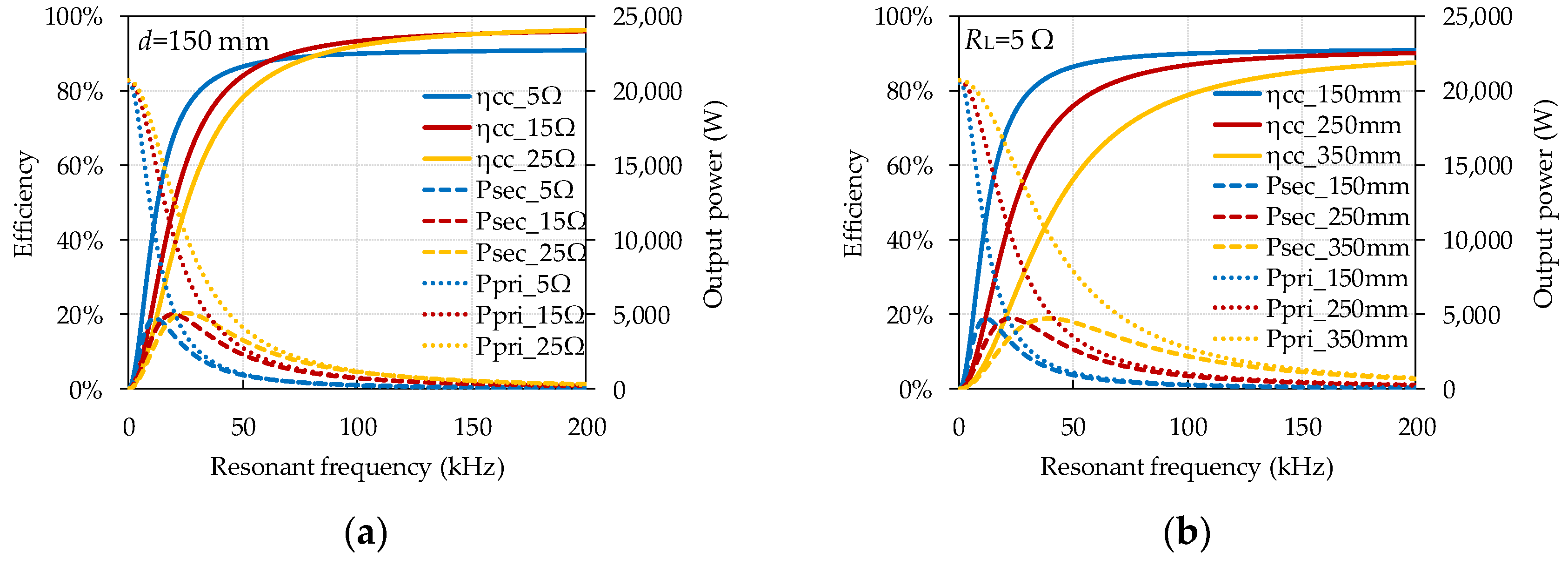
2.2. Effect of the Resonant Frequency
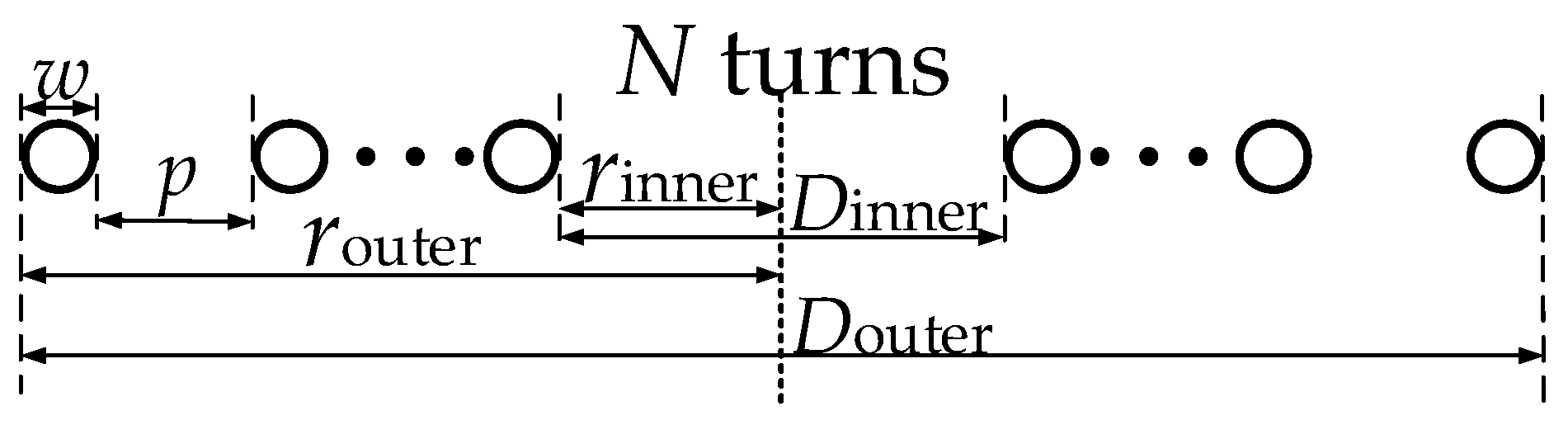
2.3. Coil-System Design Method
3. Analysis of Inverter Operation and Soft-Switching WPT System
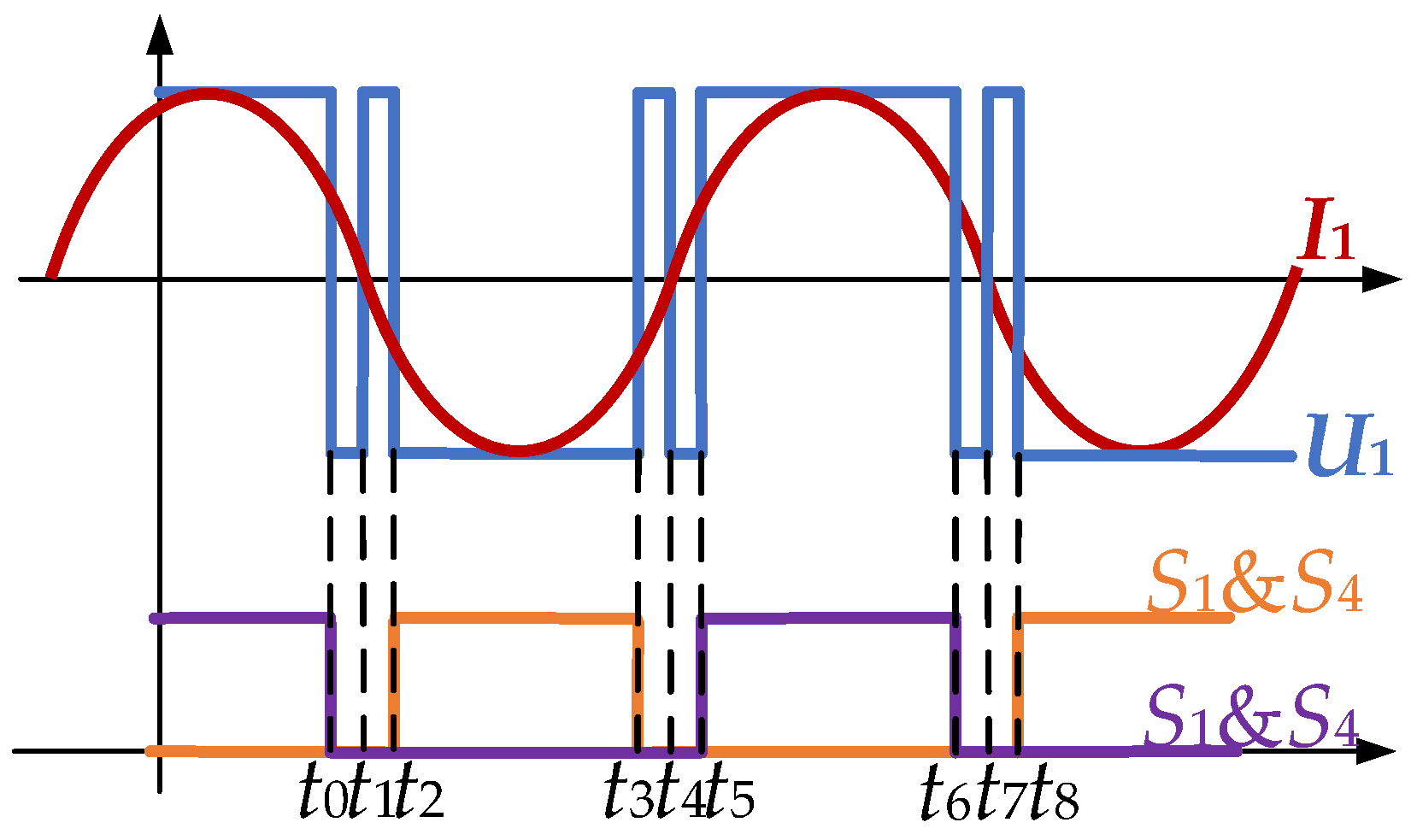
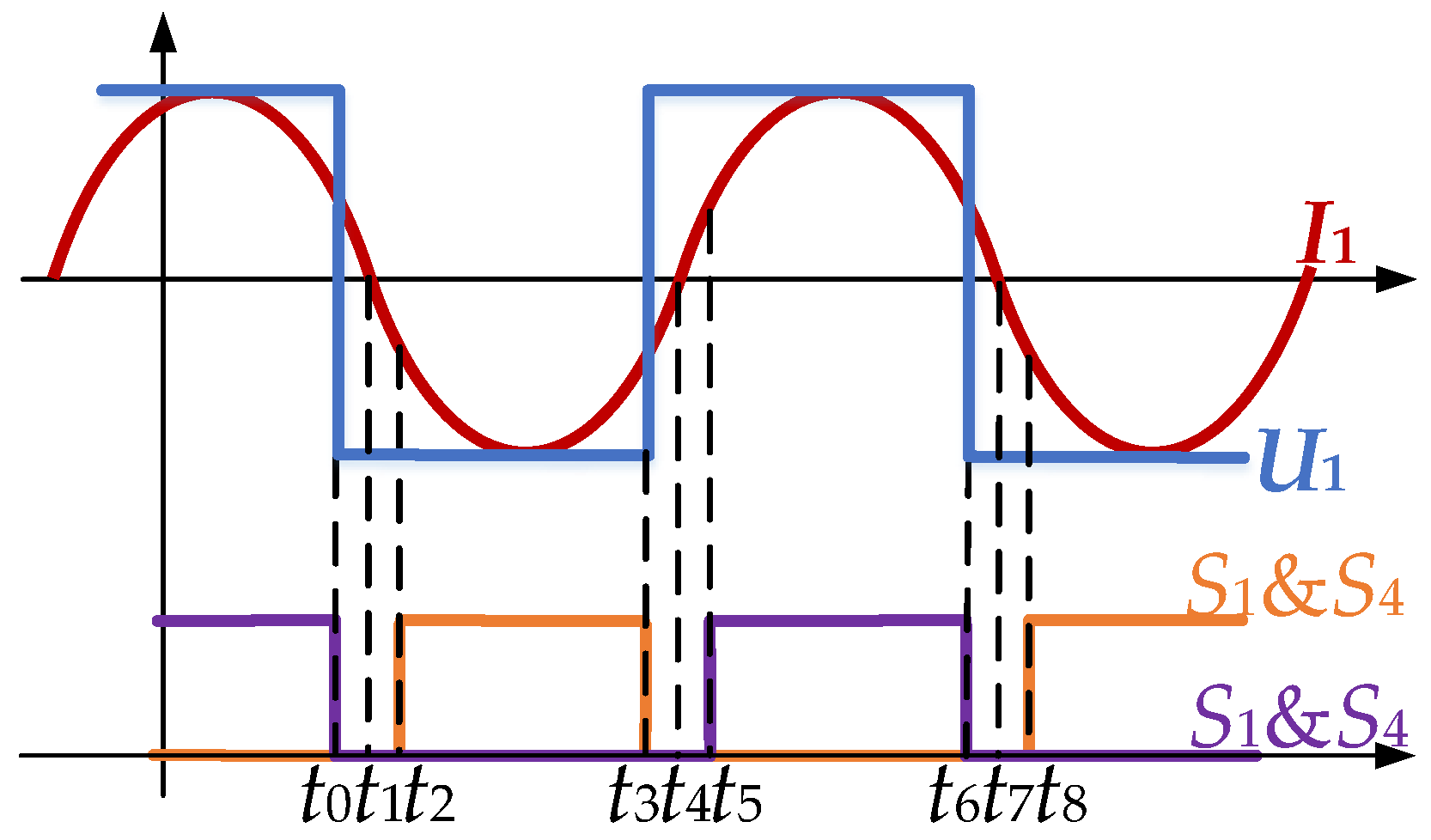
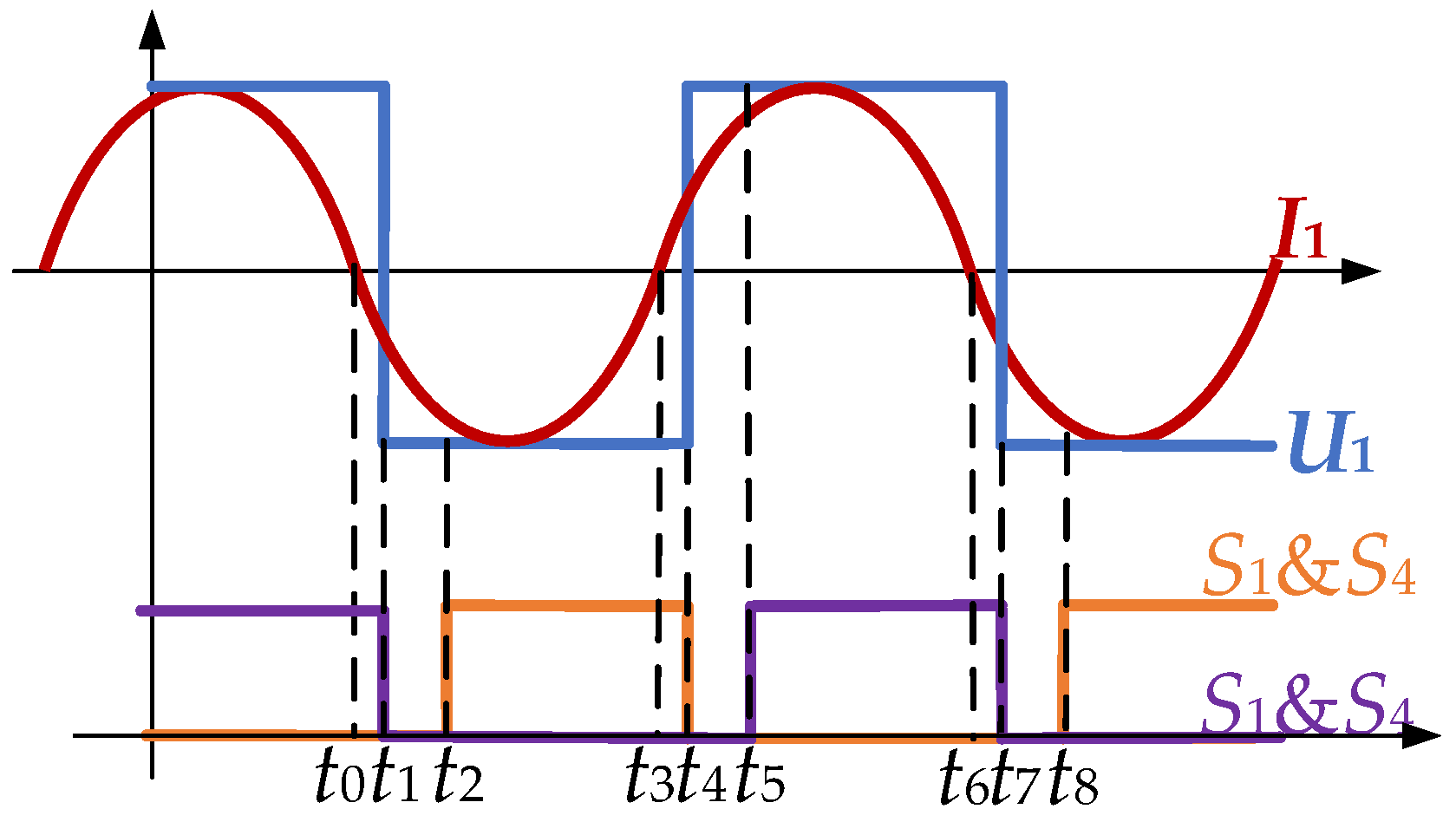
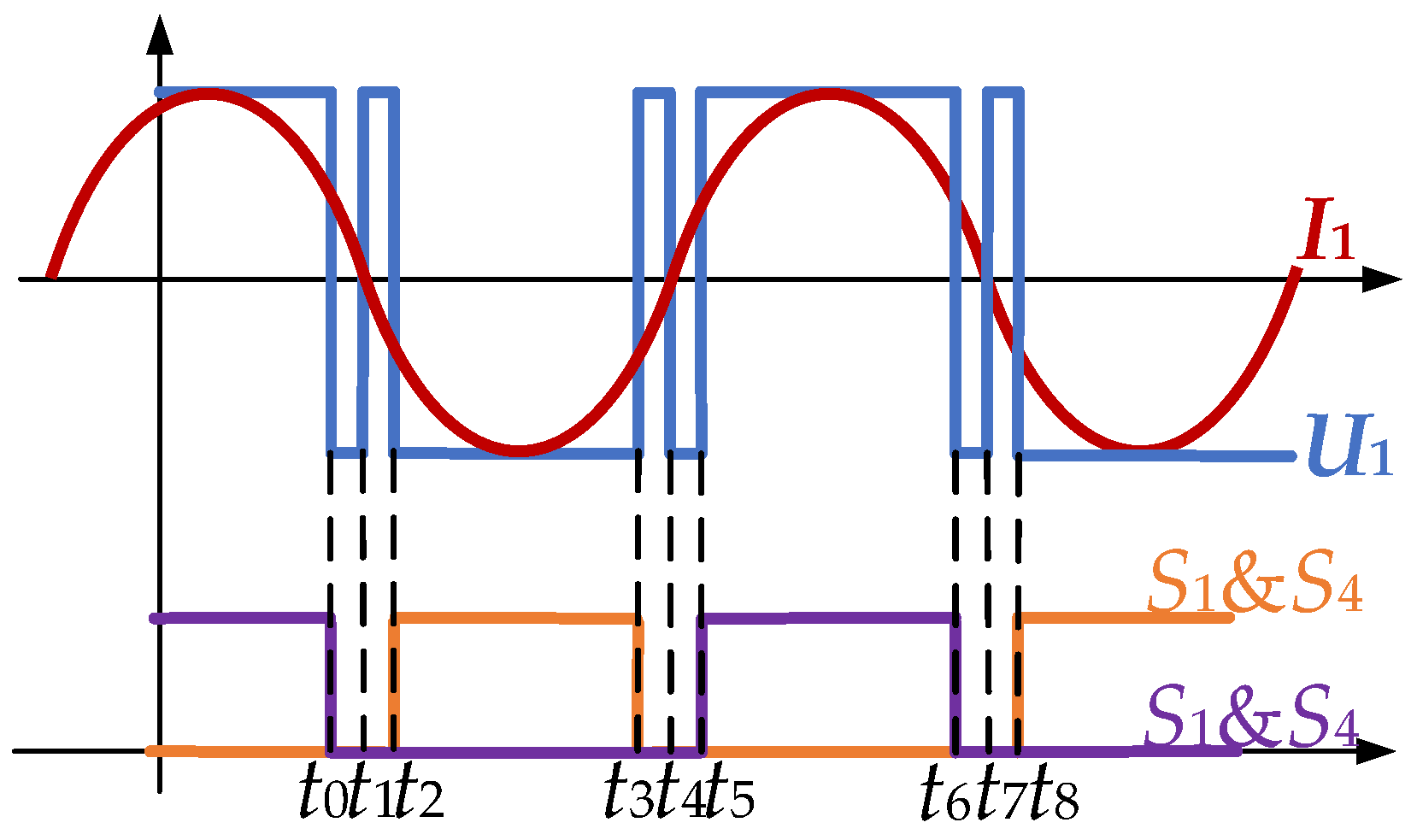
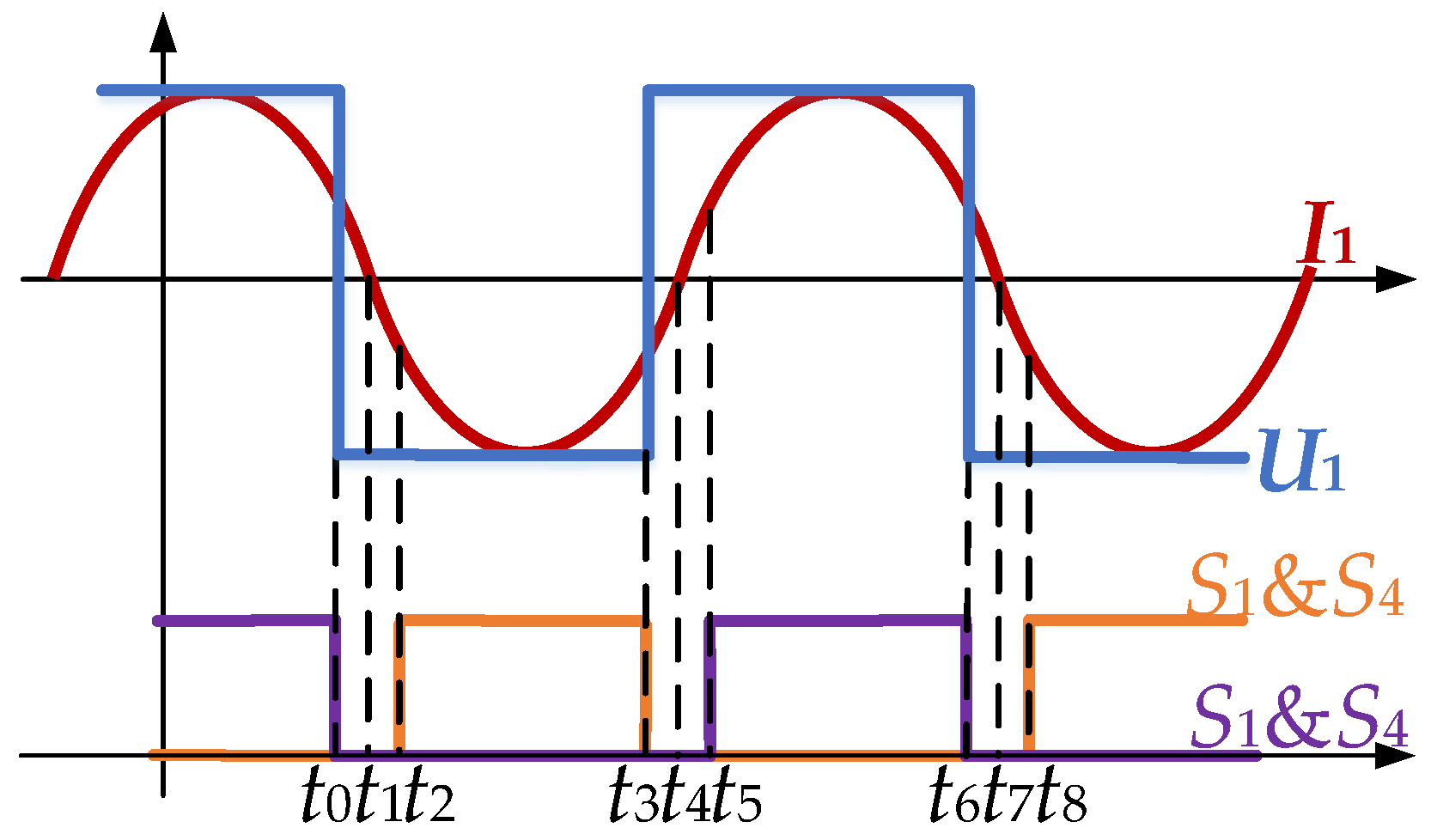
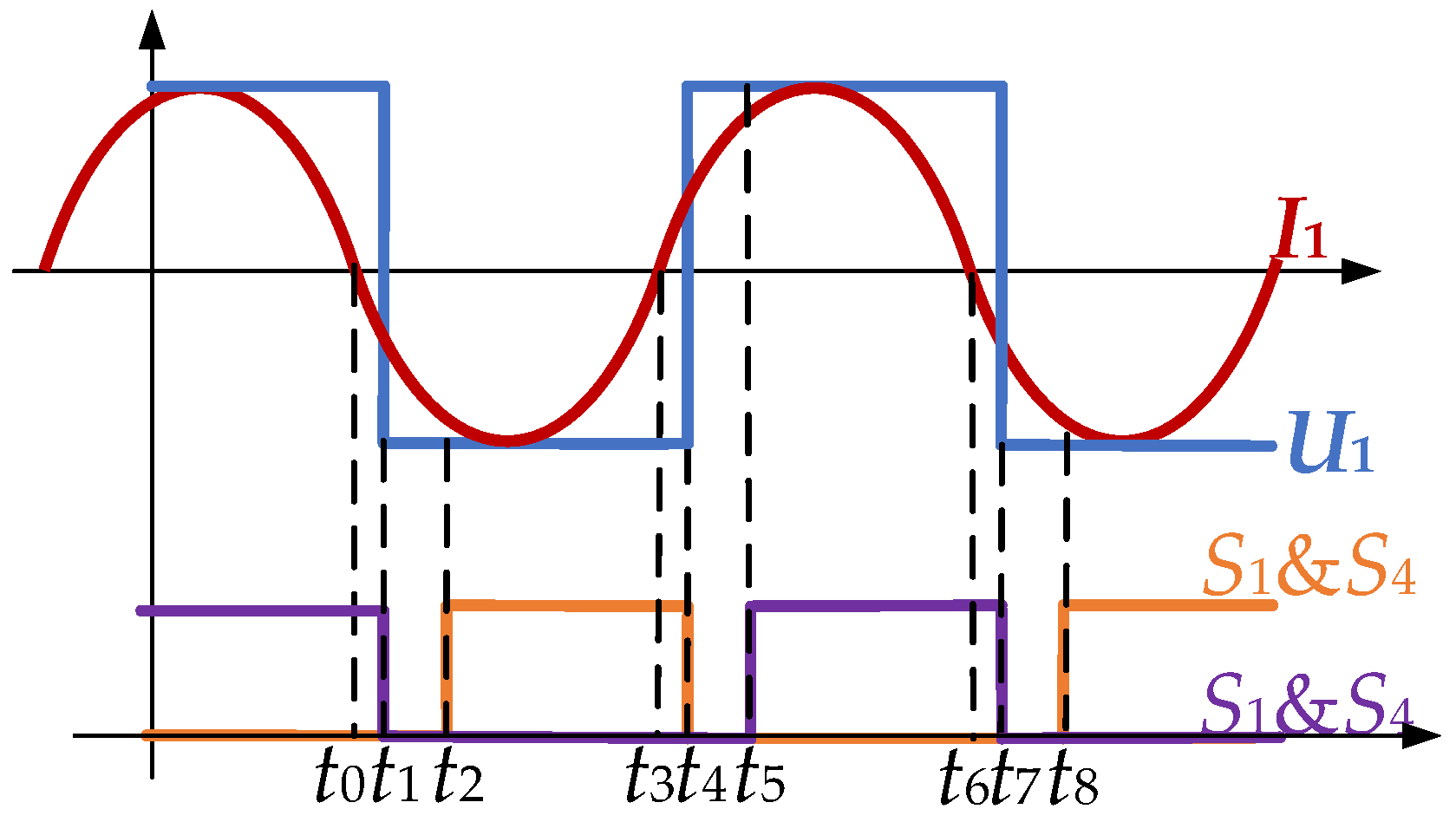
3.1. Analysis of Inverter Operation Modes
3.2. Strategy for Soft-Switching Implementation
3.3. Implementation of the Soft-Switching Techniques by Tuning the Driving Frequency
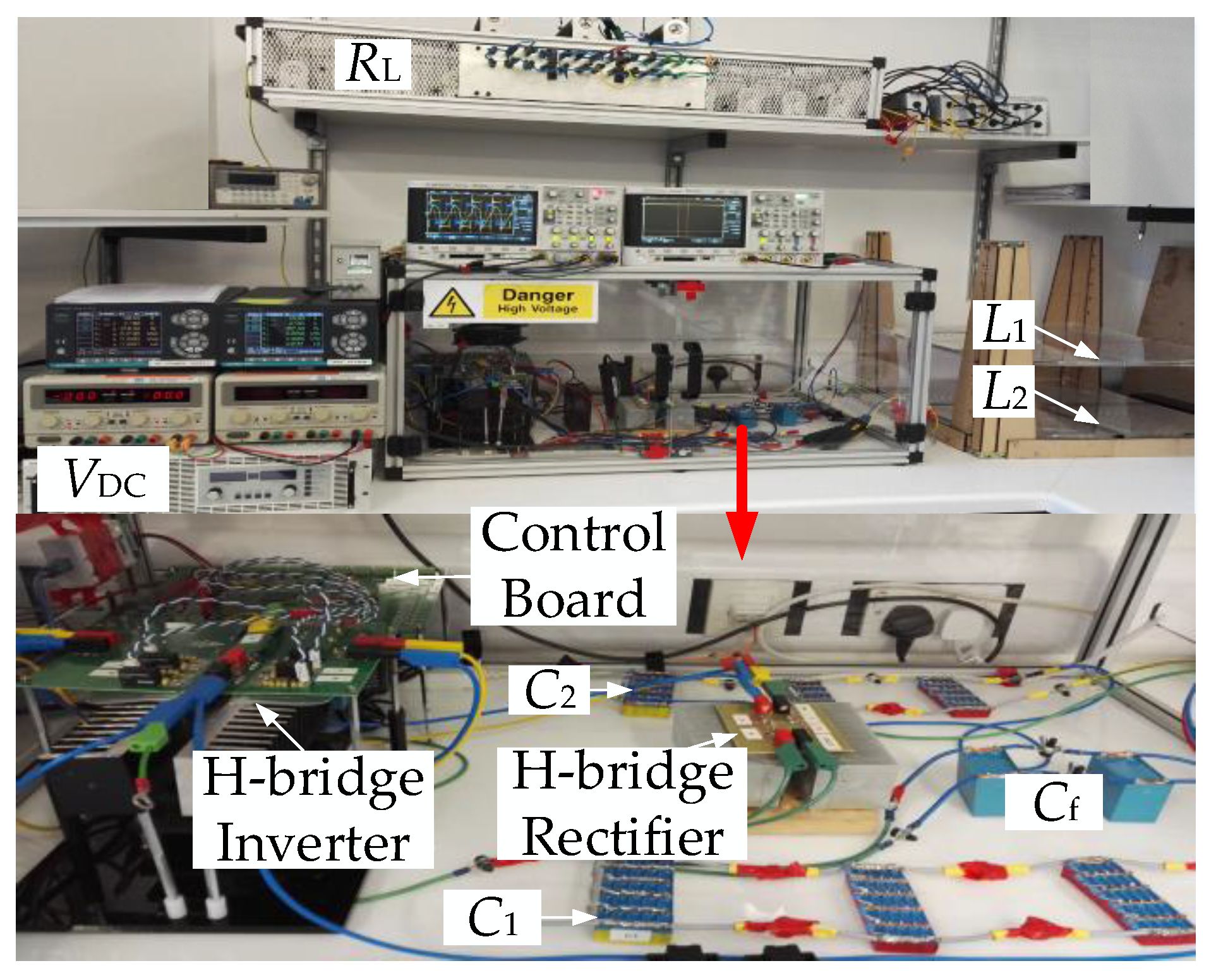
4. Experimental Verification and Discussions
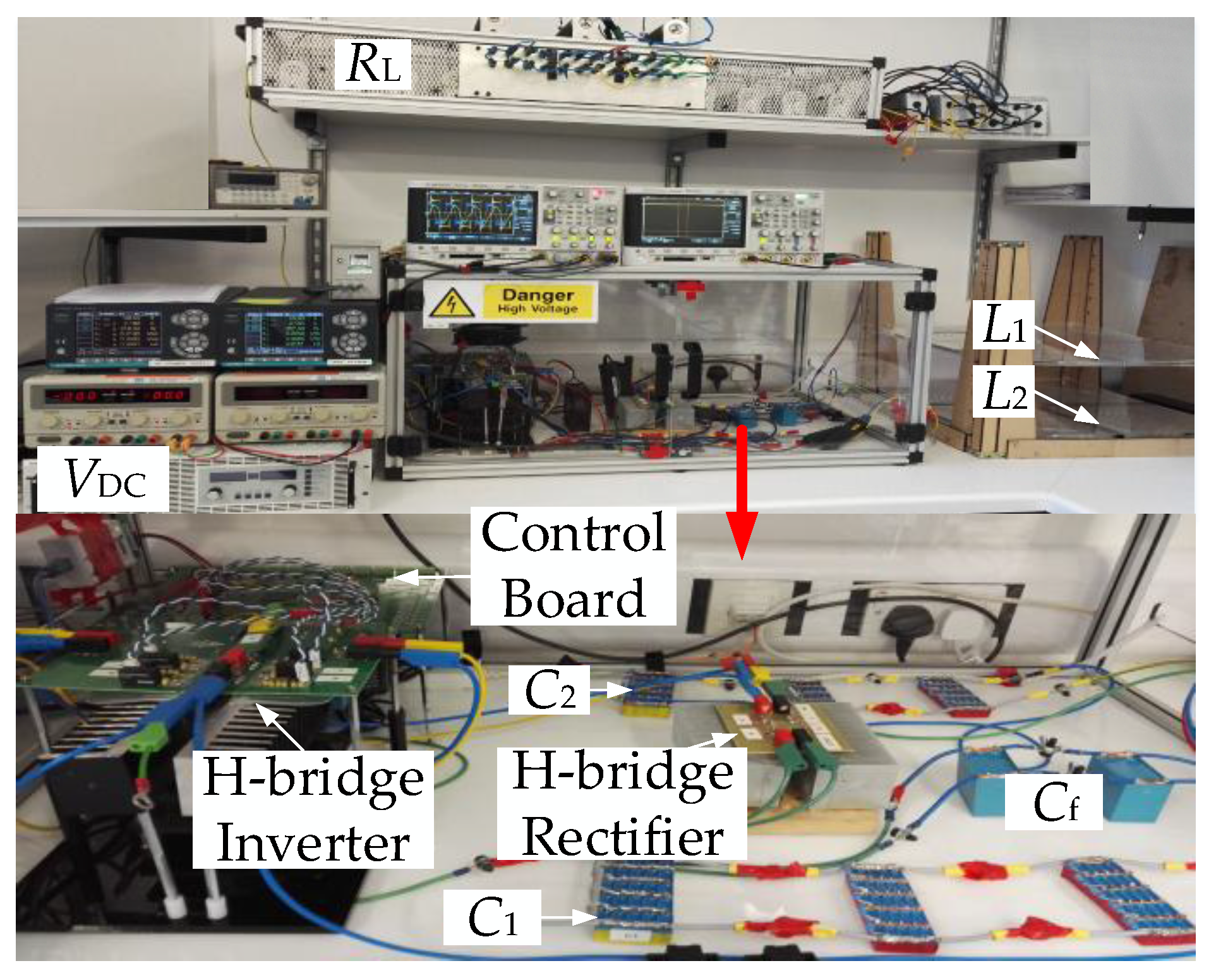
4.1. Design of the 85 kHz, 200 kHz and 500 kHz WPT Coil Systems
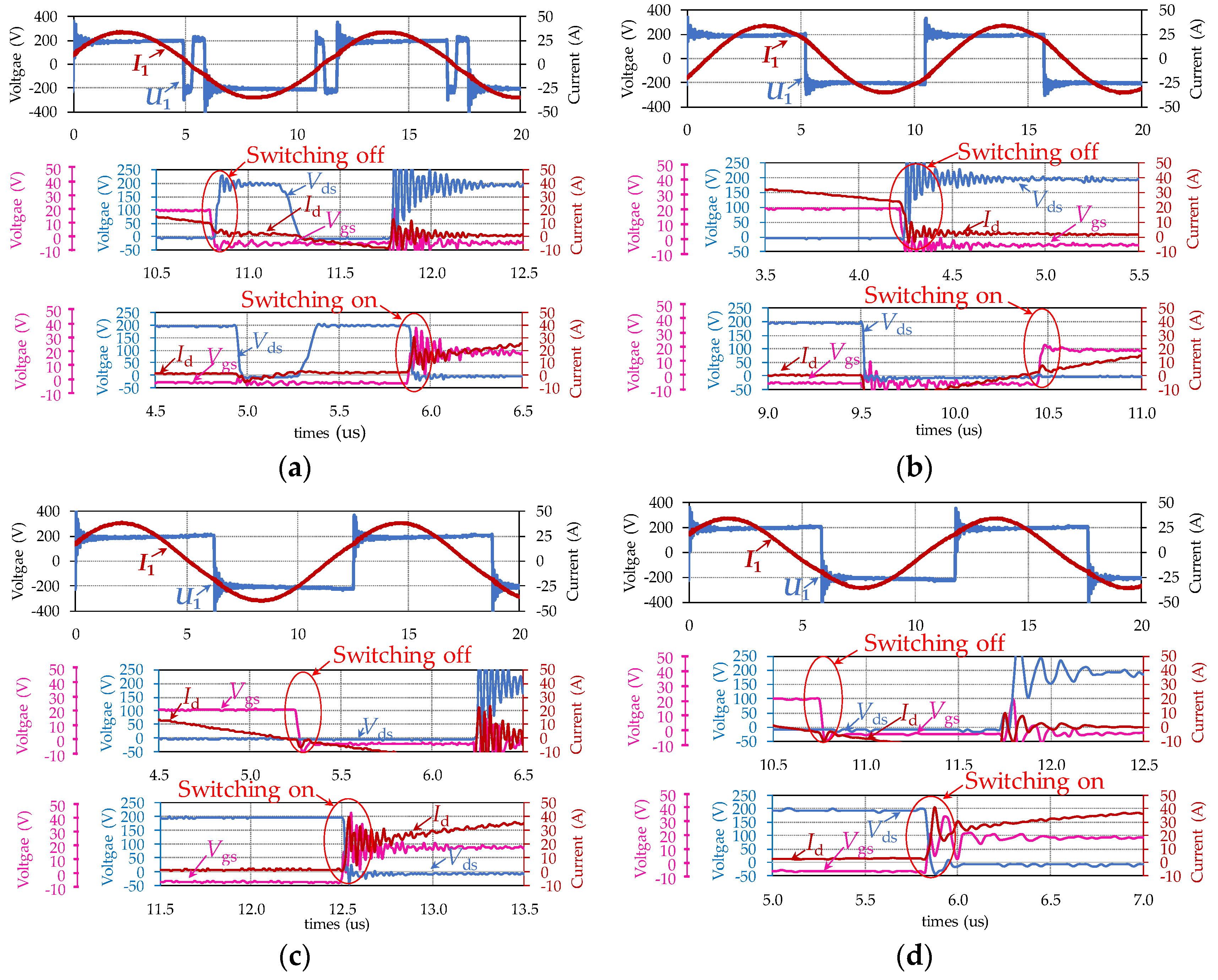
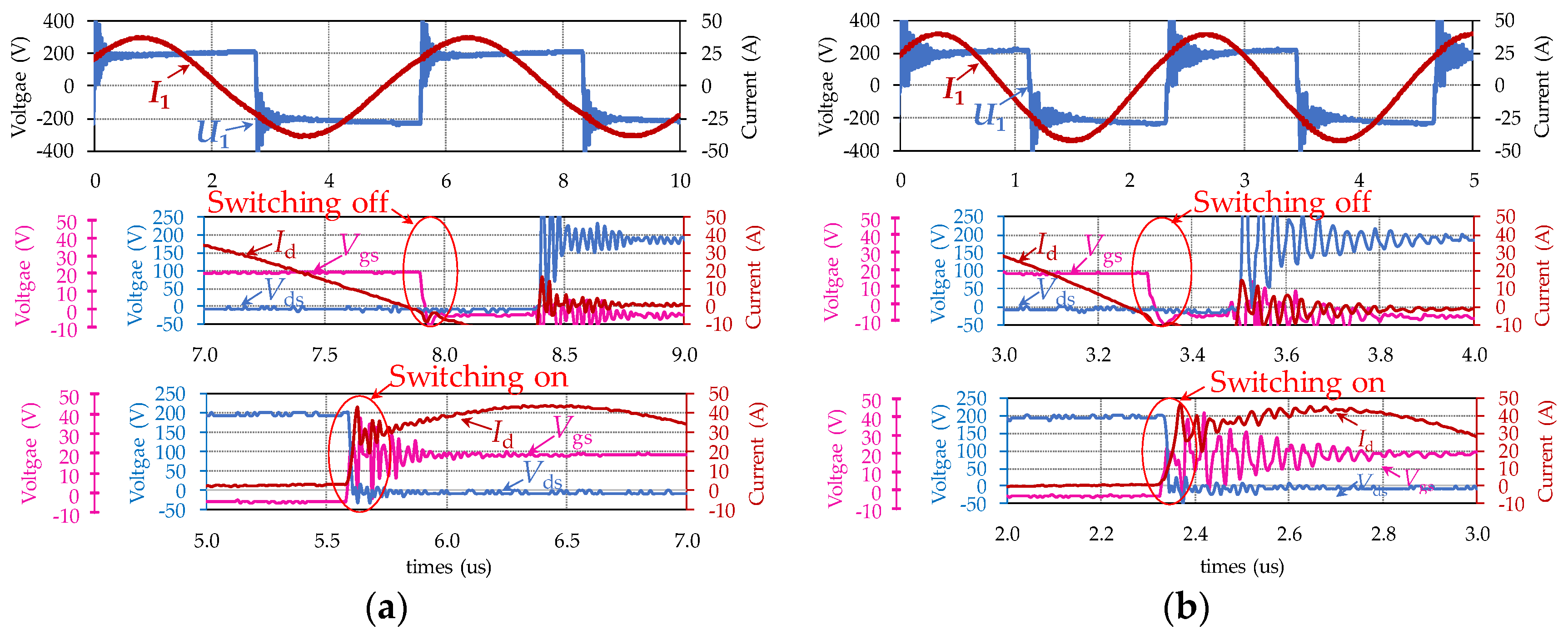
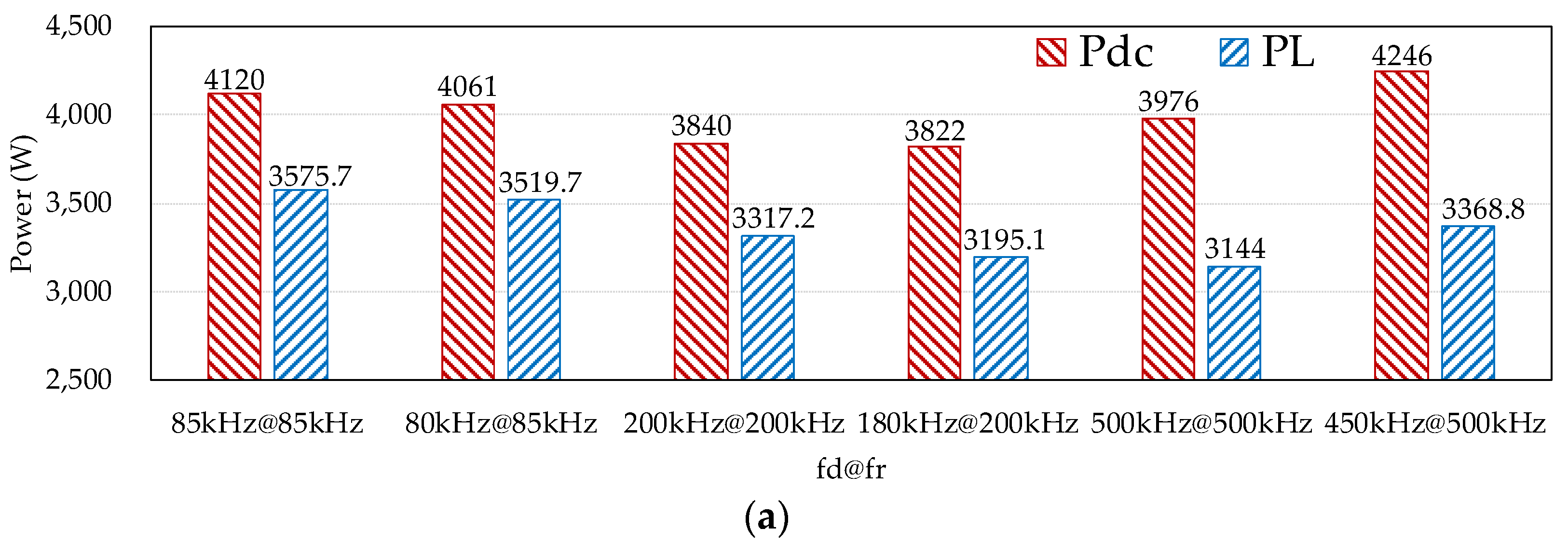
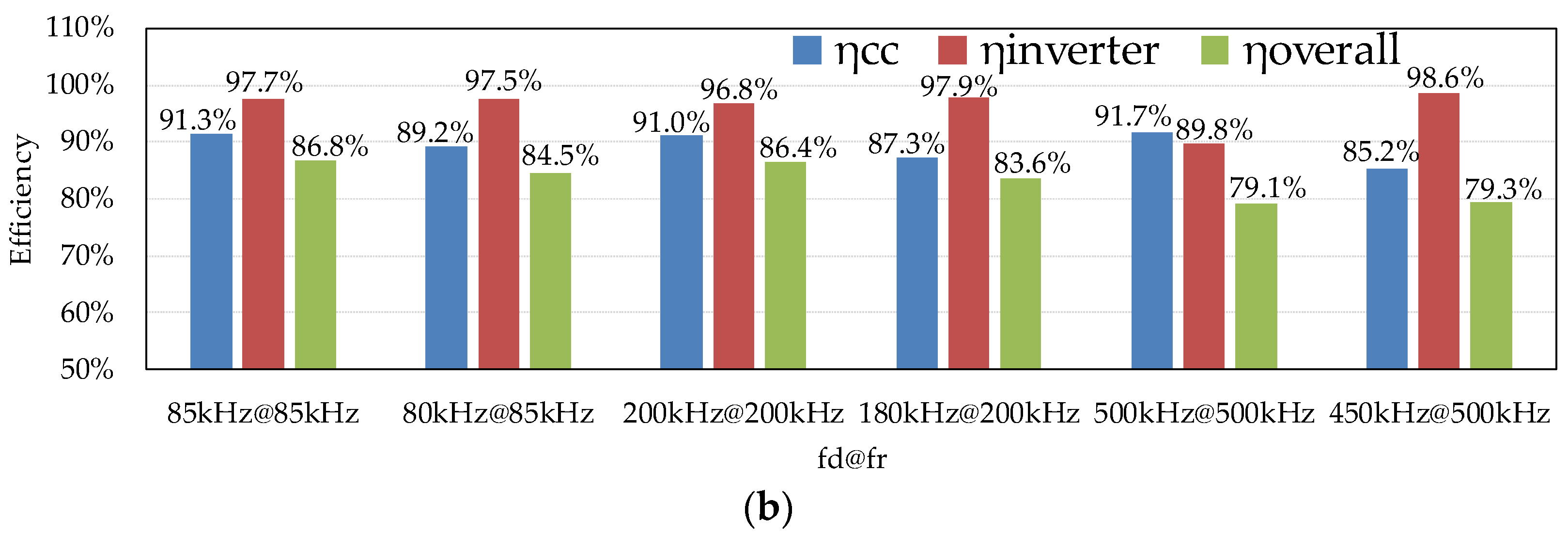
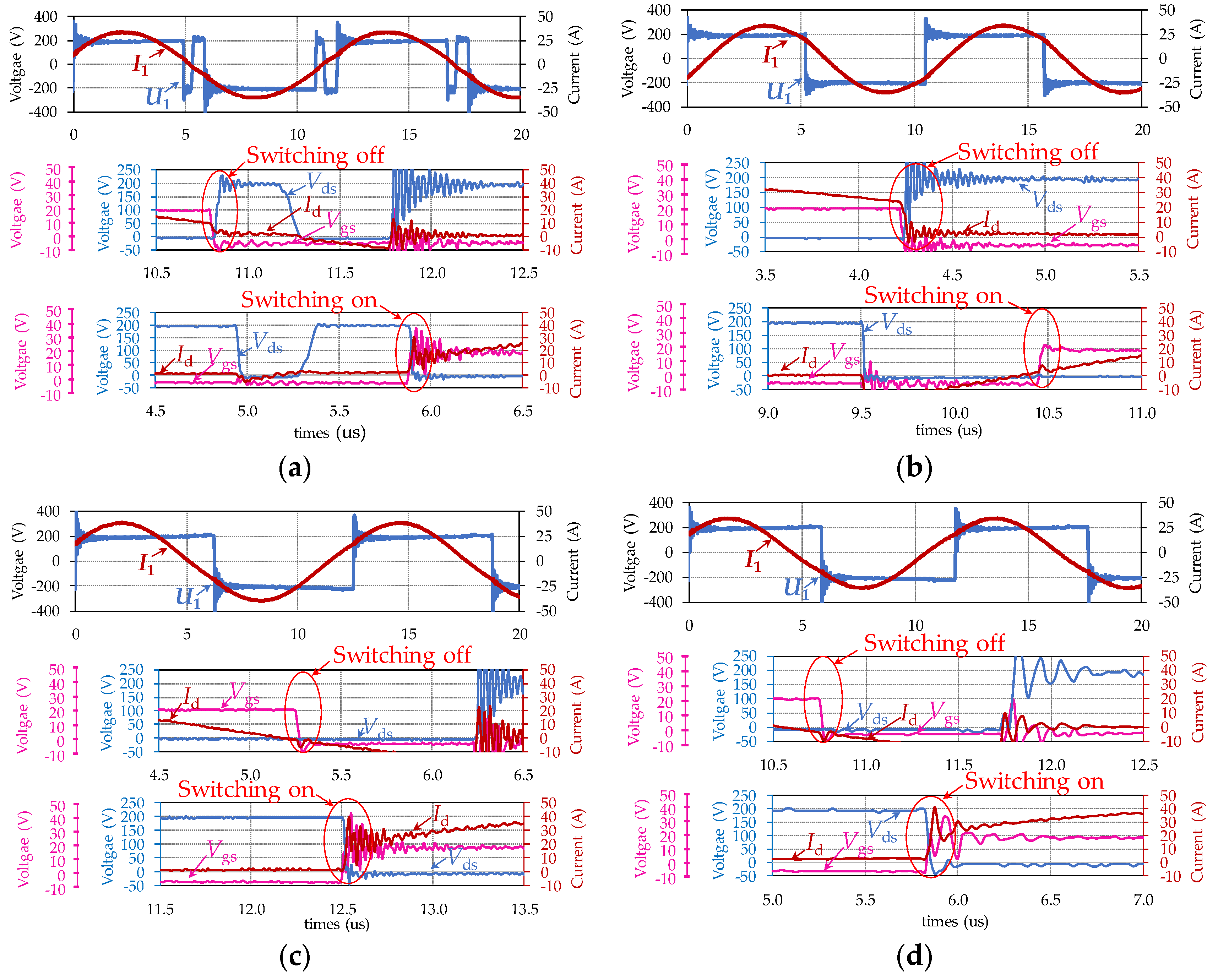
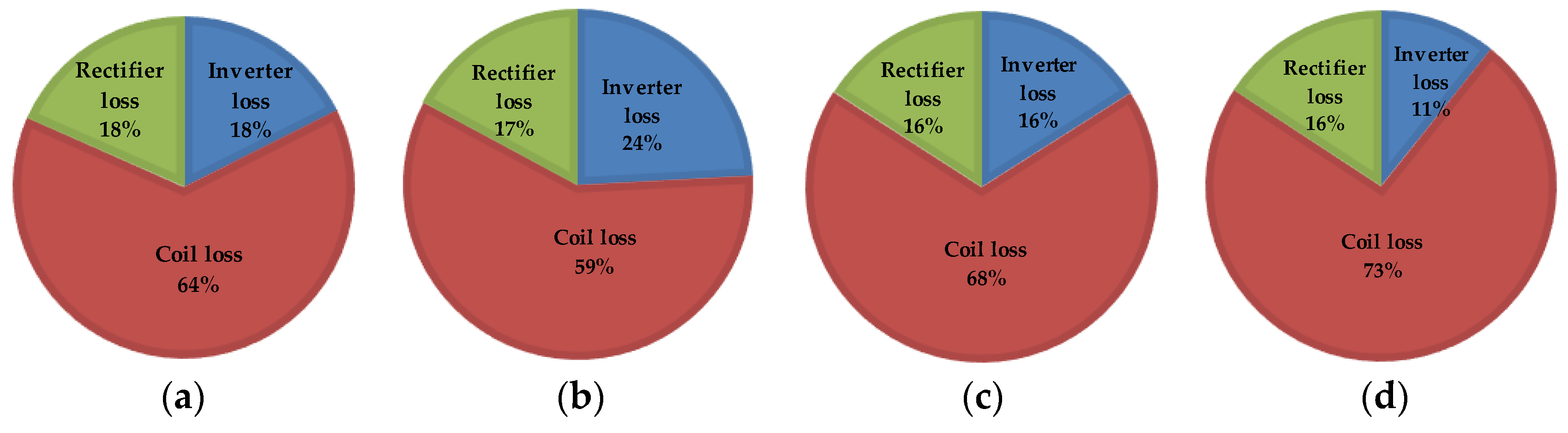
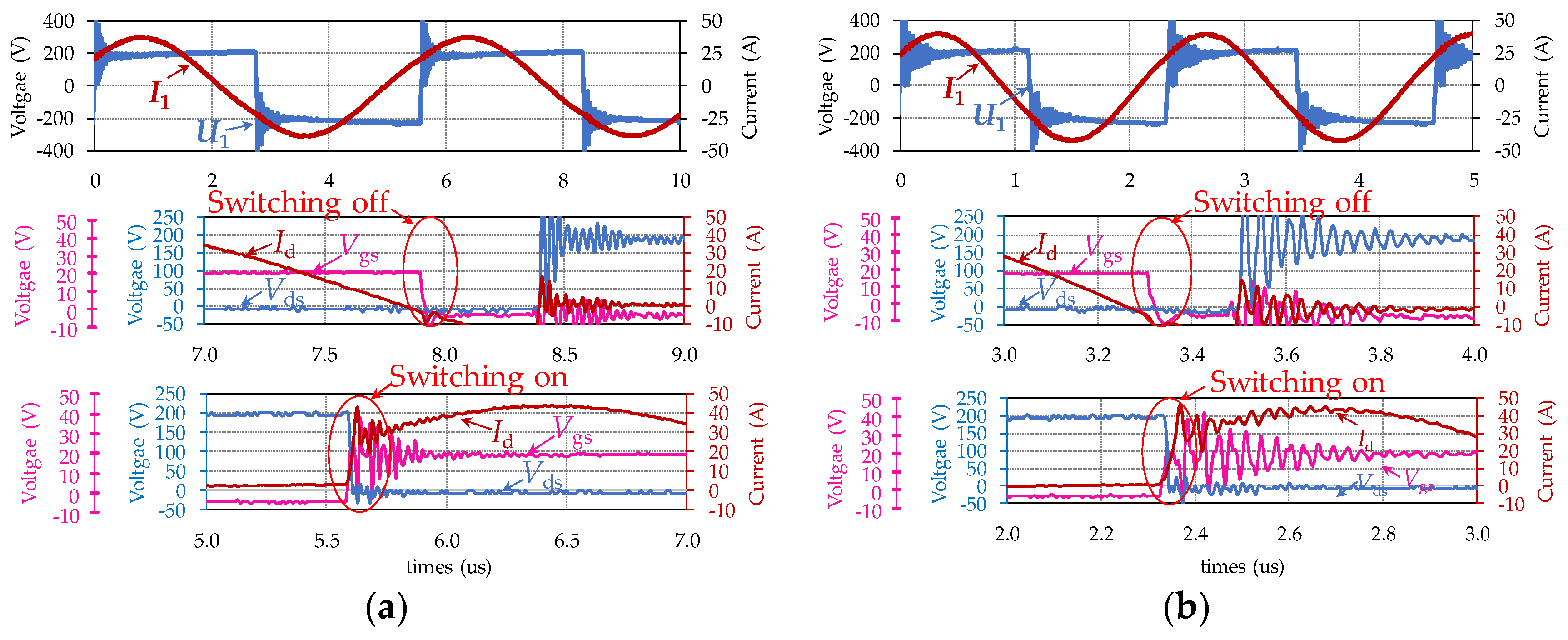
4.2. Experiment with Soft Switching
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Covic, G.A.; Elliott, G.; Stielau, O.H.; Green, R.M.; Boys, J.T. The design of a contact-less energy transfer system for a people mover system. In Proceedings of the International Conference on PowerCon 2000 Power System Technology, Perth, Australia, 4–7 December 2000; Volume 1, pp. 79–84. [Google Scholar]
- Bosshard, R.; Muhlethaler, J.; Kolar, J.W.; Stevanovic, I. The η-α-Pareto front of inductive power transfer coils. In Proceedings of the IECON 2012 38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 4270–4277. [Google Scholar]
- Khaligh, A.; Dusmez, S. Comprehensive topological analysis of conductive and inductive charging solutions for plug-in electric vehicles. IEEE Trans. Veh. Technol. 2012, 61, 3475–3489. [Google Scholar] [CrossRef]
- Wang, C.S.; Stielau, O.H.; Covic, G.A. Design Considerations for a Contactless Electric Vehicle Battery Charger. IEEE Trans. Ind. Electron. 2005, 52, 1308–1314. [Google Scholar] [CrossRef]
- Miller, J.; Daga, A. Elements of Wireless Power Transfer Essential to High Power Charging of Heavy Duty Vehicles. IEEE Trans. Transp. Electrif. 2015, 1, 26–39. [Google Scholar] [CrossRef]
- Li, S.; Li, W.; Deng, J.; Nguyen, T.D.; Mi, C.C. A Double-Sided LCC Compensation Network and Its Tuning Method for Wireless Power Transfer. IEEE Trans. Veh. Technol. 2015, 64, 2261–2273. [Google Scholar] [CrossRef]
- Pantic, Z.; Bai, S.; Lukic, S.M. ZCS LCC-compensated resonant inverter for inductive-power-transfer application. IEEE Trans. Ind. Electron. 2011, 58, 3500–3510. [Google Scholar] [CrossRef]
- Samanta, S.; Rathore, A.K.; Member, S. A New Current-Fed CLC Transmitter and LC Receiver Topology for Inductive Wireless Power Transfer Application: Analysis, Design, and Experimental Results. IEEE Trans. Transp. Electrif. 2015, 1, 357–368. [Google Scholar] [CrossRef]
- Onar, O.C.; Chinthavali, M.; Campbell, S.; Ning, P.; White, C.P.; Miller, J.M. A SiC MOSFET based inverter for wireless power transfer applications. In Proceedings of the 2014 Twenty-Ninth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Fort Worth, TX, USA, 16–20 March 2014; pp. 1690–1696. [Google Scholar]
- Chan, T.S.; Chen, C.L. LLC resonant converter for wireless energy transmission system with PLL control. In Proceedings of the IEEE International Conference on ICSET 2008 Sustainable Energy Technologies, Singapore, 24–27 November 2008; pp. 136–139. [Google Scholar]
- Tian, J.; Hu, A.P. A DC-voltage Controlled Variable Capacitor for Stabilizing the ZVS Frequency of a Resonant Converter for Wireless Power Transfer. IEEE Trans. Power Electron. 2017, 32, 2312–2318. [Google Scholar] [CrossRef]
- Lin, F.Y.; Covic, G.A.; Boys, J.T. Evaluation of Magnetic Pad Sizes and Topologies for Electric Vehicle Charging. IEEE Trans. Power Electron. 2015, 30, 6391–6407. [Google Scholar] [CrossRef]
- Lu, F.; Member, S.; Zhang, H.; Member, S.; Hofmann, H. A High Efficiency 3.3 kW Loosely-Coupled Wireless Power Transfer System Without Magnetic Material. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 2282–2286. [Google Scholar]
- Shamseh, M.B.; Yuzurihara, I.; Kawamura, A. A 3.2-kW 13.56-MHz SiC Passive Rectifier with 94.0% Efficiency Using Commutation Capacitor. IEEE Trans. Power Electron. 2016, 31, 6787–6791. [Google Scholar]
- Jeong, S.; Jung, J.; Kim, K.A.; Kim, J. Analytical investigation of optimal wireless power transfer topology for electric vehicles. In Proceedings of the 2015 IEEE PELS Workshop on Emerging Technologies: Wireless Power (WoW), Daejeon, Korea, 5–6 June 2015; pp. 1–5. [Google Scholar]
- Wang, Y.; Yao, Y.; Liu, X.; Xu, D. S/CLC Compensation Topology Analysis and Circular Coil Design for Wireless Power Transfer. IEEE Trans. Transp. Electrif. 2017, 3, 496–507. [Google Scholar] [CrossRef]
- Chan, H.; Cheng, K.; Sutanto, D. A Simplified Neumann’S Formula for Calculation of Inductance of Spiral Coil. In Proceedings of the Eighth International Conference on (IEE Conf. Publ. No. 475) Power Electronics and Variable Speed Drives, London, UK, 18–19 September 2000; pp. 18–19. [Google Scholar]
- Duong, T.P.; Lee, J.W. A dynamically adaptable impedance-matching system for midrange wireless power transfer with misalignment. Energies 2015, 8, 7593–7617. [Google Scholar] [CrossRef]
- Waffenschmidt, E.; Staring, T. Limitation of inductive power transfer for consumer applications. In Proceedings of the 2009 EPE’09 13th European Conference on Power Electronics and Applications, Barcelona, Spain, 8–10 September 2009; pp. 1–10. [Google Scholar]
- Niu, W.Q.; Chu, J.X.; Gu, W.; Shen, A.D. Exact Analysis of Frequency Splitting Phenomena of Contactless Power Transfer Systems. IEEE Trans. Circuits Syst. I Regul. Pap. 2013, 60, 1670–1677. [Google Scholar] [CrossRef]
- Sallan, J.; Villa, J.L.; Llombart, A.; Sanz, J.F. Optimal Design of ICPT Systems Applied to Electric Vehicle Battery Charge. IEEE Trans. Ind. Electron. 2009, 56, 2140–2149. [Google Scholar] [CrossRef]
- Moon, S.; Kim, B.C.; Cho, S.Y.; Ahn, C.H.; Moon, G.W. Analysis and Design of a Wireless Power Transfer System With an Intermediate Coil for High Efficiency. IEEE Trans. Ind. Electron. 2014, 61, 5861–5870. [Google Scholar] [CrossRef]
- Walder, S.; Yuan, X. Effect of load parasitics on the losses and ringing in high switching speed SiC MOSFET based power converters. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 6161–6168. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Value | Value | Unit |
|---|---|---|---|---|---|
| Designed resonant frequency | fr | 85 | 200 | 500 | kHz |
| Expected mutual inductance | M12 | 18.72 | 7.96 | 3.18 | μH |
| Designed coupling coefficient | k | 0.3 | 0.3 | 0.3 | - |
| Expected coil self-inductance | L | 62.4 | 26.5 | 10.6 | μH |
| Expected compensation capacitance | C | 56.2 | 24 | 9.6 | nF |
| Designed out radius | router | 290 | 290 | 190 | mm |
| Designed channel width | p | 16 | 16 | 16 | mm |
| Designed coil turns | N | 16 | 6 | 5 | - |
| Actual coil self-inductance | La | 64.0 | 29.39 | 12.0 | μH |
| Actual coil resistance | RL1 | 56.7 | 48.2 | 25.9 | mΩ |
| Actual compensation capacitance | Ca | 54 | 21 | 8.44 | nF |
| Actual coil to coil distance | d | 150 | 140 | 100 | mm |
| Actual coupling coefficient | ka | 0.281 | 0.27 | 0.27 | - |
| Actual mutual inductance | M12a | 17.98 | 7.93 | 3.24 | μH |
| Dead-time | t | 1 | 0.5 | 0.2 | μs |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Liu, J.; Wang, J.; Wang, C.; Yuan, X. Design Method for the Coil-System and the Soft Switching Technology for High-Frequency and High-Efficiency Wireless Power Transfer Systems. Energies 2018, 11, 7. https://doi.org/10.3390/en11010007
Liu X, Liu J, Wang J, Wang C, Yuan X. Design Method for the Coil-System and the Soft Switching Technology for High-Frequency and High-Efficiency Wireless Power Transfer Systems. Energies. 2018; 11(1):7. https://doi.org/10.3390/en11010007
Chicago/Turabian StyleLiu, Xu, Jianhua Liu, Jianjing Wang, Chonglin Wang, and Xibo Yuan. 2018. "Design Method for the Coil-System and the Soft Switching Technology for High-Frequency and High-Efficiency Wireless Power Transfer Systems" Energies 11, no. 1: 7. https://doi.org/10.3390/en11010007