AC and DC Impedance Extraction for 3-Phase and 9-Phase Diode Rectifiers Utilizing Improved Average Mathematical Models

 , , and
, , and
Abstract
:1. Introduction
2. Mathematical Average Value Models
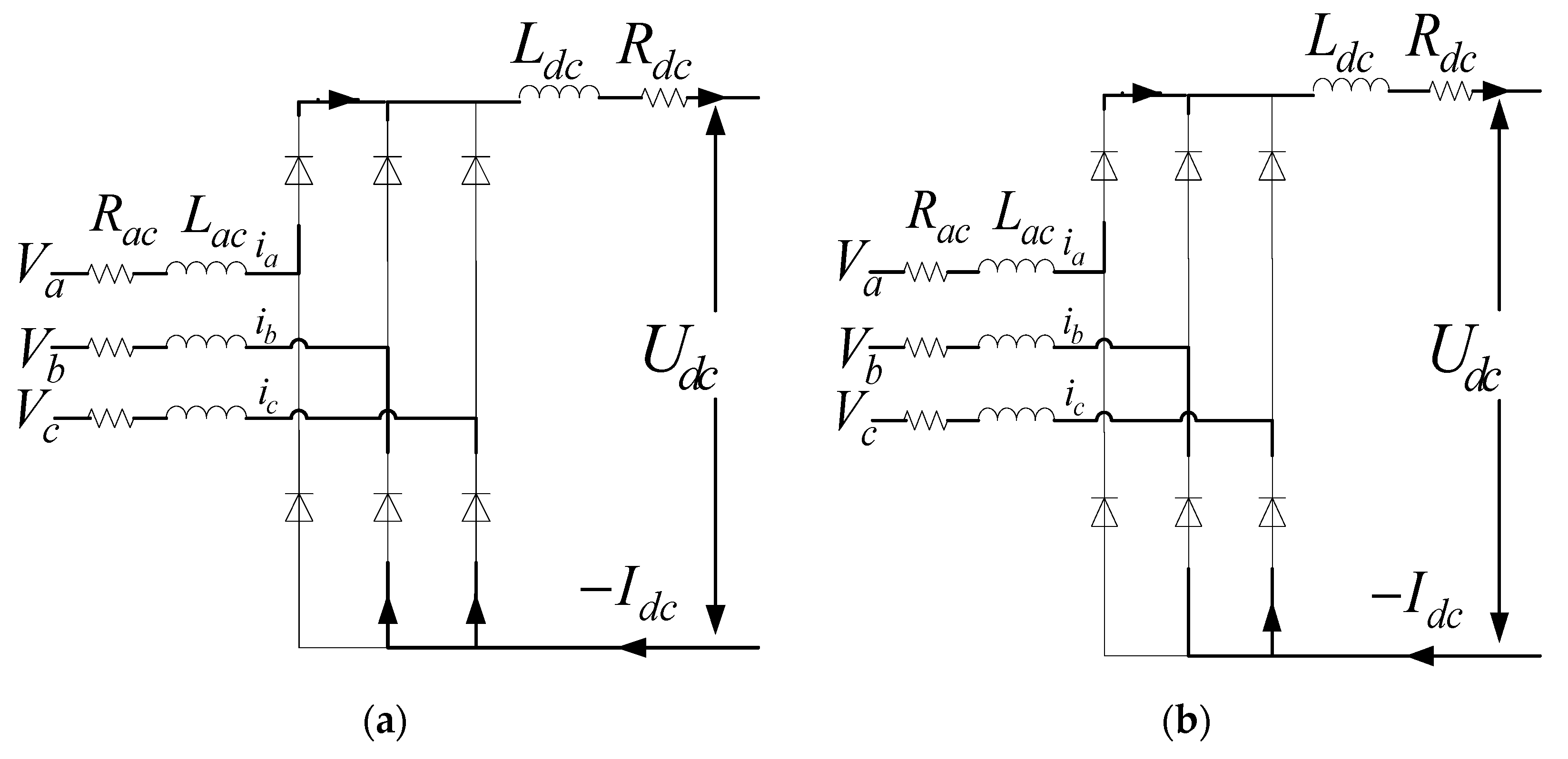
2.1. Dynamic Average Value Model of 3-Phase Diode Rectifiers
AC Current Equation
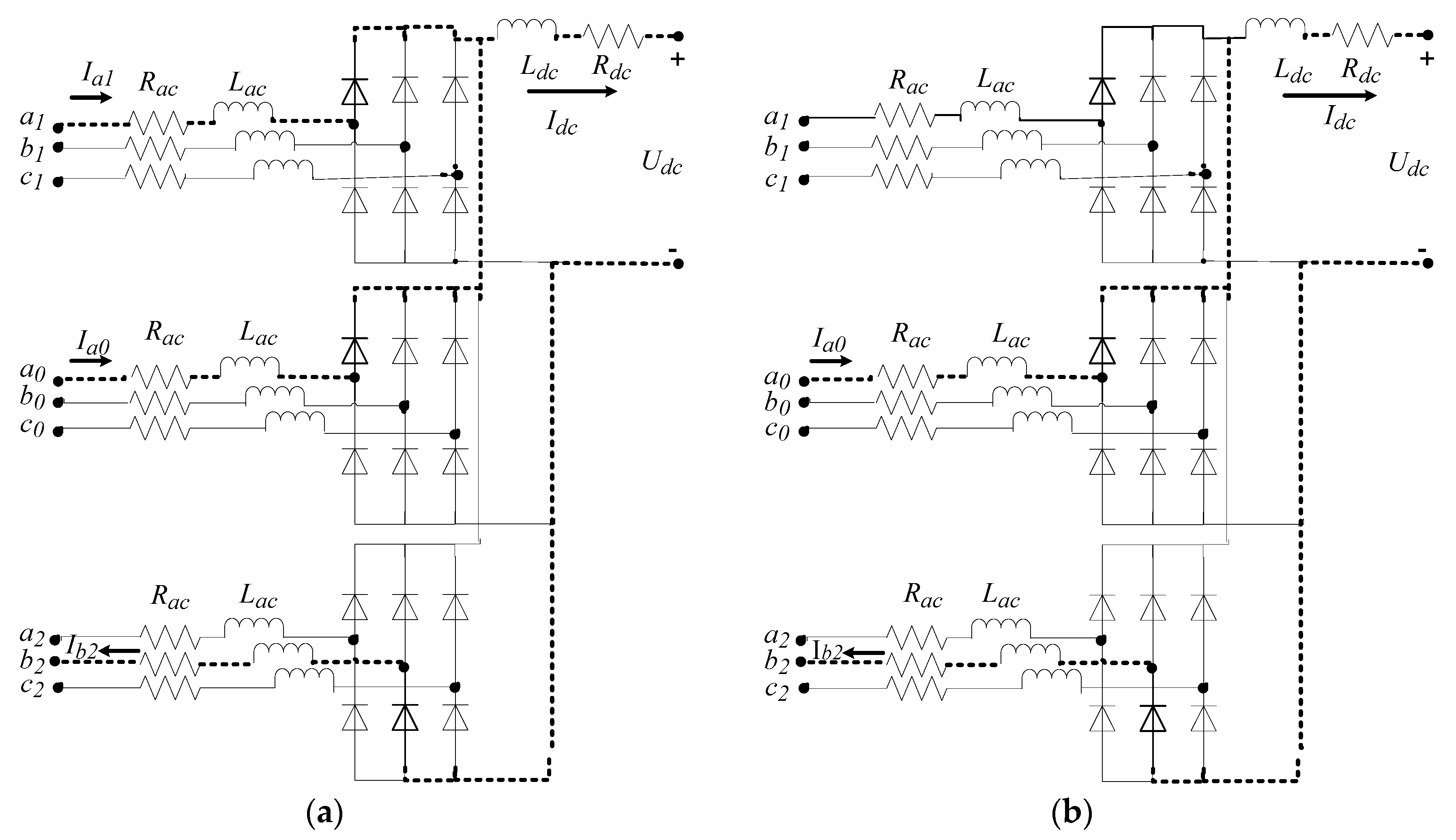
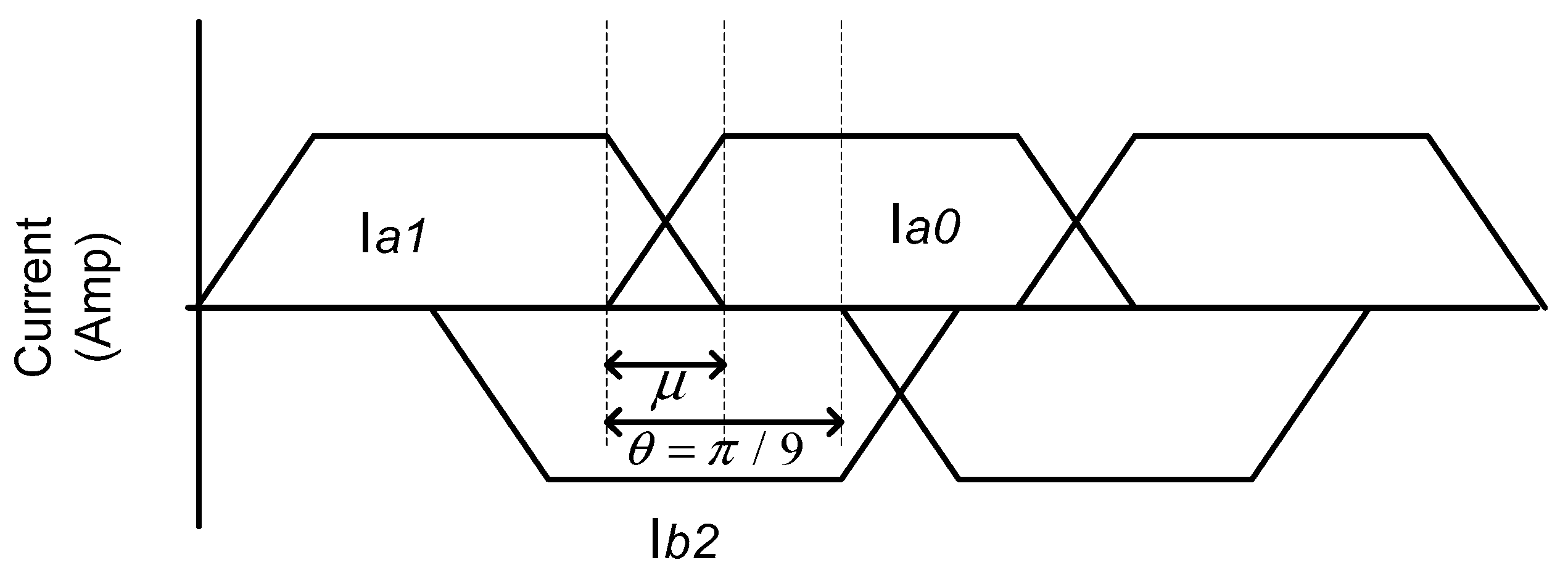
2.2. Dynamic Average Value Model for 9-Phase Diode Rectifier
AC Current Equations
3. Simulations and Experimental Results
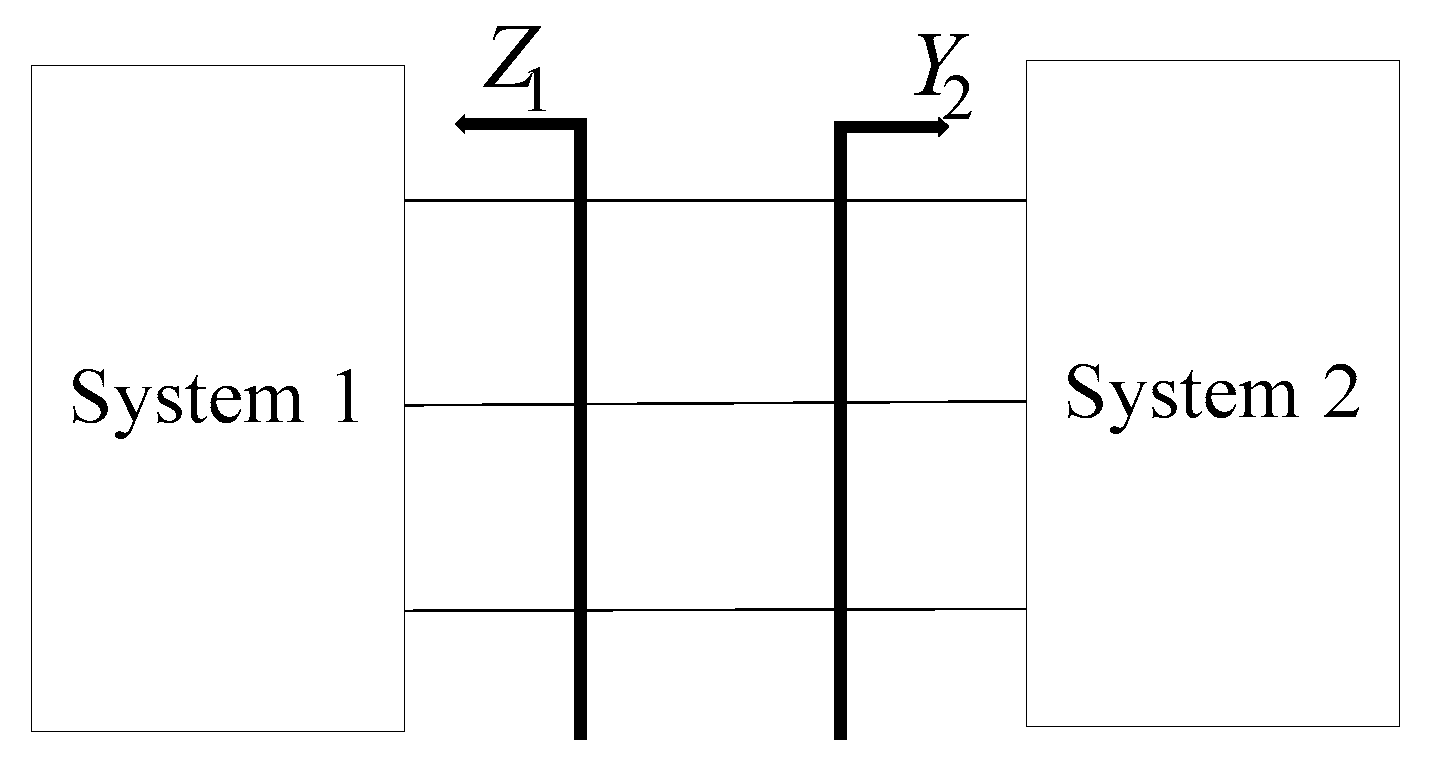
4. Experimental Setup for Impedance Measurements
4.1. DC Impedance Measurement
4.2. AC Impedance Measurement
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Kulkarni, A.; Chen, W.; Bazzi, A. Implementation of Rapid Prototyping Tools for Power Loss and Cost Minimization of DC-DC Converters. Energies 2016, 9, 509. [Google Scholar] [CrossRef]
- Kuo, M.; Tsou, M. Novel Frequency Swapping Technique for Conducted Electromagnetic Interference Suppression in Power Converter Applications. Energies 2017, 10, 24. [Google Scholar] [CrossRef]
- Weilin, L.; Liliuyuan, L.; Wenjie, L.; Xiaohua, W. State of Charge Estimation of Lithium-Ion Batteries Using a Discrete-Time Nonlinear Observer. IEEE Trans. Ind. Electron. 2017, 64, 8557–8565. [Google Scholar]
- Lee, K.; Venkataramanan, G.; Jahns, T.M. Source current harmonic analysis of adjustable speed drives under input voltage unbalance and sag conditions. IEEE Trans. Power Deliv. 2006, 21, 567–576. [Google Scholar] [CrossRef]
- Lee, K.V.; Blasko, V.; Jahns, T.M.; Lipo, T.A. Input Harmonic Estimation and Control Methods in Active Rectifiers. IEEE Trans. Power Deliv. 2010, 25, 953–960. [Google Scholar] [CrossRef]
- Villablanca, M.E.; Nadal, J.I. Current distortion reduction in six-phase parallel-connected AC/DC rectifiers. IEEE Trans. Power Deliv. 2008, 23, 953–959. [Google Scholar] [CrossRef]
- Chiniforoosh, S.; Hamid, A.; Juri, J. A Generalized Methodology for Dynamic Average Modeling of High-Pulse-Count Rectifiers in Transient Simulation Programs. IEEE Trans. Energy Convers. 2016, 31, 228–239. [Google Scholar] [CrossRef]
- Fangang, M.; Xiaona, X.; Lei, G. A Simple Harmonic Reduction Method in Multipulse Rectifier Using Passive Devices. IEEE Trans. Ind. Inform. 2017, 13, 2680–2692. [Google Scholar]
- Mon-Nzongo, D.L.; Jin, T.; Ipoum-Ngome, P.G.; Song-Manguelle, J. An Improved Topology for Multipulse AC/DC Converters within HVDC and VFD Systems: Operation in Degraded Modes. IEEE Trans. Ind. Electron. 2018, 65, 3646–3656. [Google Scholar] [CrossRef]
- Chiniforoosh, S.; Hamid, A.; Davoudi, A.; Jatskevich, J.; Martinez, J.A.; Saeedifard, M.; Aliprantis, D.C.; Sood, V.K. Steady-State and Dynamic Performance of Front-End Diode Rectifier Loads as Predicted by Dynamic Average-Value Models. IEEE Trans. Power Deliv. 2013, 28, 1533–1541. [Google Scholar] [CrossRef]
- Yang, T.; Bozhko, S.; Le-Peuvedic, J.M.; Asher, G.; Hill, C.I. Dynamic Phasor Modeling of Multi-Generator Variable Frequency Electrical Power Systems. IEEE Trans. Power Syst. 2016, 31, 563–571. [Google Scholar] [CrossRef]
- Chiniforoosh, S.; Jatskevich, J.; Dinavahi, V.; Iravani, R.; Martinez, J.A.; Ramirez, A. Dynamic average modeling of line-commutated converters for power systems applications. In Proceedings of the 2009 IEEE Power & Energy Society General Meeting, Calgary, AB, Canada, 26–30 July 2009. [Google Scholar]
- Juan, A.; Martinez, V. Transient Analysis of Power Systems: Solution Techniques, Tools and Applications, 1st ed.; John Wiley & Sons, Ltd.: New York, NY, USA, 2015. [Google Scholar]
- Chiniforoosh, S.; Jatskevich, J.; Yazdani, A.; Sood, V.; Dinavahi, V.; Martinez, J.A.; Ramirez, A. Definitions and applications of dynamic average models for analysis of power systems. IEEE Trans. Power Deliv. 2010, 25, 2655–2669. [Google Scholar] [CrossRef]
- Shahbaz, K.; Zhang, X.; Husan, A.; Haider, Z.; Muhammad, S.; Bakht, M.K. Impedance extraction utilizing improved average models for three phase diode rectifiers. In Proceedings of the 2017 IEEE 3rd International Conference on Computer Science and System Engineering, Beijing, China, 17–19 August 2017. [Google Scholar]
- Zhu, H. New Multipulse Diode Rectifier Average Models for AC and DC Power Systems Studies. Ph.D. Thesis, Virginia Polytechnic Institute, State University, Blacksburg, VA, USA, 2005. [Google Scholar]
- Yang, T.; Bozhko, S.; Asher, G. Functional Modeling of Symmetrical Multipulse Autotransformer Rectifier Units for Aerospace Applications. IEEE Trans. Power Electron. 2015, 30, 4704–4713. [Google Scholar] [CrossRef]
- Middlebrook, R.D. Input filter considerations in design and application of switching regulators. In Proceedings of the 1976 IEEE Industry Applications Annual Meeting, Chicago, IL, USA, 11–14 October 1976. [Google Scholar]
- Panov, Y.; Jovanovic, M. Practical issues of input/output impedance measurements in switching power supplies and application of measured data to stability analysis. In Proceedings of the 20th Annual IEEE Applied Power Electronics Conference and Exposition, Austin, TX, USA, 6–8 March 2005. [Google Scholar]
- Sanz, M.; Valdivia, V.; Zumel, P.; Moral, D.L.; Fernández, C.; Lázaro, A.; Barrado, A. Analysis of the Stability of Power Electronics Systems: A Practical Approach. In Proceedings of the 29th Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Fort Worth, TX, USA, 16–20 March 2014. [Google Scholar]
- Zheng, X.; Ali, H.; Wu, X.; Zaman, H.; Khan, S. Non-Linear Behavioral Modeling for DC-DC Converters and Dynamic Analysis of Distributed Energy Systems. Energies 2017, 10, 63. [Google Scholar] [CrossRef]
- Huang, J.; Corzine, K.A.; Belkhayat, M. Small-Signal Impedance Measurement of Power-Electronics-Based AC Power Systems Using Line-to-Line Current Injection. IEEE Trans. Power Electron. 2009, 24, 445–455. [Google Scholar] [CrossRef]
- Erickson, R.W.; Dragan, M. Fundamentals of Power Electronics, International Edition; Springer: Boulder, CO, USA, 2001. [Google Scholar]
- Aldhaheri, A.; Etemadi, A. Impedance Decoupling in DC Distributed Systems to Maintain Stability and Dynamic Performance. Energies 2017, 10, 470. [Google Scholar] [CrossRef]
- Simon, A.; Alejandro, O. Power-Switching Converters; Marcel Dekker, Inc.: New York, NY, USA, 1995. [Google Scholar]
- Valerio, S.; Alessandro, C.; Stephen, M.C.; Pericle, Z. Stability Assessment of Power-Converter-Based AC systems by LTP Theory: Eigenvalue Analysis and Harmonic Impedance Estimation. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 4, 1513–1525. [Google Scholar]
- Bo, W.; Dushan, B.; Rolando, B.; Paolo, M.; Zhiyu, S. Analysis of D-Q Small-Signal Impedance of Grid-Tied Inverters. IEEE Trans. Power Electron. 2016, 31, 675–687. [Google Scholar]
- Serrano-Finetti, R.E.; Pallas-Areny, R. Output impedance measurement in power sources and conditioners. In Proceedings of the 2007 IEEE Instrument and Measurement Technology Conference, Warsaw, Poland, 1–3 May 2007. [Google Scholar]
- Cho, Y.; Hur, K.; Kang, Y.; Muljadi, E. Impedance-Based Stability Analysis in Grid Interconnection Impact Study Owing to the Increased Adoption of Converter-Interfaced Generators. Energies 2017, 10, 1355. [Google Scholar] [CrossRef]
- Radwan, A.A.A.; Mohamed, Y.A.R.I. Assessment and Mitigation of Interaction Dynamics in Hybrid AC/DC Distribution Generation Systems. IEEE Trans. Smart Grid 2012, 3, 1382–1393. [Google Scholar] [CrossRef]
- Xu, L.; Fan, L. Impedance-Based Resonance Analysis in a VSC-HVDC System. IEEE Trans. Power Deliv. 2013, 28, 2209–2216. [Google Scholar] [CrossRef]
- Sun, J. Small-Signal Methods for AC Distributed Power Systems—A Review. IEEE Trans. Power Electron. 2009, 24, 2545–2554. [Google Scholar]
- Sun, J. Impedance-Based Stability Criterion for Grid-Connected Inverters. IEEE Trans. Power Electron. 2011, 26, 3075–3078. [Google Scholar] [CrossRef]
- Song, Y.; Wang, X.; Blaabjerg, F. Impedance-Based High-Frequency Resonance Analysis of DFIG System in Weak Grids. IEEE Trans. Power Electron. 2017, 32, 3536–3548. [Google Scholar] [CrossRef]
- Cao, W.; Ma, Y.; Yang, L.; Wang, F.; Tolbert, L.M. D-Q Impedance Based Stability Analysis and Parameter. Design of Three-Phase Inverter-Based AC Power Systems. IEEE Trans. Ind. Electron. 2017, 64, 6017–6028. [Google Scholar] [CrossRef]
- Cespedes, M.; Sun, J. Impedance Modeling and Analysis of Grid-Connected Voltage-Source Converters. IEEE Trans. Power Electron. 2014, 29, 1254–1261. [Google Scholar] [CrossRef]
- Wen, B.; Dong, D.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Impedance-Based Analysis of Grid-Synchronization Stability for Three-Phase Paralleled Converters. IEEE Trans. Power Electron. 2016, 31, 26–38. [Google Scholar] [CrossRef]
- Wang, X.; Blaabjerg, F.; Wu, W. Modeling and Analysis of Harmonic Stability in an AC Power-Electronics-Based Power System. IEEE Trans. Power Electron. 2014, 29, 6421–6432. [Google Scholar] [CrossRef]
- Lyu, J.; Cai, X.; Molinas, M. Frequency Domain Stability Analysis of MMC-Based HVDC for Wind Farm Integration. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 141–151. [Google Scholar] [CrossRef]
- Bayo-Salas, A.; Beerten, J.; Rimez, J.; Hertem, D.V. Impedance-based stability assessment of parallel VSC HVDC grid connections. In Proceedings of the 11th IET International Conference on AC and DC Power Transmission, Birmingham, UK, 10–12 February 2015. [Google Scholar]
- Wang, X.; Blaabjerg, F.; Liserre, M.; Chen, Z.; He, J.; Li, Y. An Active Damper for Stabilizing Power-Electronics-Based AC Systems. IEEE Trans. Power Electron. 2014, 29, 3318–3329. [Google Scholar] [CrossRef]
- Shahbaz, K.; Zhang, X.; Husan, A.; Haider, Z.; Muhammad, S.; Bakht, M.K. AC impedance extraction for three phase systems. In Proceedings of the 2017 IEEE 3rd International Conference on Computer Science and System Engineering, Beijing, China, 17–19 August 2017. [Google Scholar]
- Huang, J.; Corzine, K.A. Ac impedance measurement by line-to-line injected current. In Proceedings of the 41 IAS Annual Meeting of IEEE Conference on Industry Applications Conference, Tampa, FL, USA, 8–12 October 2006. [Google Scholar]
- Liqiu, H.; Wang, J.; David, H. State-space average modelling of 6- and 12-pulse diode rectifiers. In Proceedings of the 2007 IEEE Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007. [Google Scholar]
- Antonio, G.; Jiabin, W. State-space average modelling of synchronous generator fed 18-pulse diode rectifier. In Proceedings of the 2009 IEEE 13 Conference on Power Electronics and Applications, Barcelona, Spain, 8–10 September 2009. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Parameter | Values |
|---|---|---|
| 1 | Frequency | 400 Hz |
| 2 | Power | 2048 Watts |
| 3 | Input Voltage (Vin) | 115 Vrms |
| 4 | 8 mH | |
| 5 | 500 µH | |
| 6 | 10 mΩ | |
| 7 | 20 mΩ | |
| 8 | 32 Ω |
| No. | Parameter | Values |
|---|---|---|
| 1 | Frequency | 400 Hz |
| 2 | Power | 2112 Watts |
| 3 | Input Voltage (Vin) | 115 Vrms |
| 4 | 3 µH | |
| 5 | 100 µH | |
| 6 | 10 mΩ | |
| 7 | 20 mΩ | |
| 8 | Load Resistance | 50 Ω |
| No. | Parameter | Values |
|---|---|---|
| 1 | Power | 2000 Watts |
| 2 | Line Frequency ( | 400 Hz |
| 3 | Input Voltage (Vg) | 115 Vrms |
| 4 | 10 mΩ | |
| 5 | 500 µH | |
| 6 | 0.01 Ω | |
| 7 | 50 µF | |
| 8 | 10 mΩ | |
| 9 | 15 µF | |
| 10 | 40 mΩ | |
| 11 | 10 µH | |
| 12 | 1 mH | |
| 13 | 100 Ω | |
| 14 | Load Resistance | 30 Ω |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, S.; Zhang, X.; Khan, B.M.; Ali, H.; Zaman, H.; Saad, M. AC and DC Impedance Extraction for 3-Phase and 9-Phase Diode Rectifiers Utilizing Improved Average Mathematical Models. Energies 2018, 11, 550. https://doi.org/10.3390/en11030550
Khan S, Zhang X, Khan BM, Ali H, Zaman H, Saad M. AC and DC Impedance Extraction for 3-Phase and 9-Phase Diode Rectifiers Utilizing Improved Average Mathematical Models. Energies. 2018; 11(3):550. https://doi.org/10.3390/en11030550
Chicago/Turabian StyleKhan, Shahbaz, Xiaobin Zhang, Bakht Muhammad Khan, Husan Ali, Haider Zaman, and Muhammad Saad. 2018. "AC and DC Impedance Extraction for 3-Phase and 9-Phase Diode Rectifiers Utilizing Improved Average Mathematical Models" Energies 11, no. 3: 550. https://doi.org/10.3390/en11030550