A Fuzzy Gravitational Search Algorithm to Design Optimal IIR Filters

Faculty of Communication Sciences, University of Teramo, 64100 Teramo, Italy
*
Author to whom correspondence should be addressed.
Energies 2018, 11(4), 736; https://doi.org/10.3390/en11040736
Submission received: 24 February 2018
/
Revised: 13 March 2018
/
Accepted: 18 March 2018
/
Published: 23 March 2018
Abstract
:The goodness of Infinite Impulse Response (IIR) digital filters design depends on pass band ripple, stop band ripple and transition band values. The main problem is defining a suitable error fitness function that depends on these parameters. This fitness function can be optimized by search algorithms such as evolutionary algorithms. This paper proposes an intelligent algorithm for the design of optimal 8th order IIR filters. The main contribution is the design of Fuzzy Inference Systems able to tune key parameters of a revisited version of the Gravitational Search Algorithm (GSA). In this way, a Fuzzy Gravitational Search Algorithm (FGSA) is designed. The optimization performances of FGSA are compared with those of Differential Evolution (DE) and GSA. The results show that FGSA is the algorithm that gives the best compromise between goodness, robustness and convergence rate for the design of 8th order IIR filters. Moreover, FGSA assures a good stability of the designed filters.
1. Introduction
The design of optimal Infinite Impulse Response (IIR) digital filters is a very interesting challenge. The main techniques to design IIR filters are traditional design technique and optimization techniques. The first method is commonly known as bilinear transformation approach [1]. The second approach regards the applications of optimization techniques to design optimal filters. Among linear optimization algorithms, the steepest-descent and quasi-Newton (QN) algorithms are used for IIR filters design [1,2]. QN algorithms offer the advantages of robustness and fast convergence. Moreover, because QN optimization approach is very flexible, it can be used to design filters with arbitrary amplitude and/or phase responses. QN algorithms have also been used to design linear-phase IIR filters [3]. Chen et al. [4] proposed a technique for IIR filters design based on the minimization the error between the order-reduced filter’s response and the desired one in the Hankel-norm sense. In the optimization algorithm proposed by Lu and Hinamoto [5] for the design of optimal IIR filters, the coefficients of all sub-filters are jointly optimized through a sequence of linear updates with each update carried out using second-order cone programming.
IIR filters are used in a wide range of applications where a high-selectivity processing of discrete signals is needed [6]. Lai and Lin [7] imposed two elliptic constraints on the frequency response of an IIR filter: the first one to minimize the maximum phase error, whereas the second one to constrain the maximum magnitude error. Another constrained optimization was introduced by Nongpiur et al. [8] for the design of IIR Digital Differentiators. The method in [8] minimizes the group-delay deviation under the constraint that the maximum amplitude-response error must be below a fixed level. Constraints on the magnitude and phase responses for the design of nearly linear-phase IIR filters was the main contribution of [9]. Lang [10] presented a method with the possibility to specify a maximum radius for the poles of the designed rational transfer function. A computationally low intensive method for designing IIR multi-Notch filters was proposed by Duarte et al. [11]. The design of IIR filters may be oriented on magnitude and delay together: by combining the root-mean-square error function of variable frequency response and a suitable stability constrained function, the stability problem is overcome [12].
Generally, the problem of designing IIR filters is formulated as a nonlinear optimization problem. Moreover, the traditional methods based on gradient search can easily be stuck at local minima of error surface. In order to solve this problem, some methods based on metaheuristic approaches have been proposed. Due to their fast convergence property, Differential Evolution (DE) algorithms [13] have been applied to design robustly stable IIR filters [14,15,16]. Karaboga [17] proposed a technique to design IIR filters through DE. A seeker-optimization-algorithm based on evolutionary methods has been proposed for digital IIR filter design [18]. Other evolutionary algorithms such as Particle Swarm Optimization (PSO) [19] have been used for the design of IIR filters to reconstruct missing segments of multidimensional data [20]. A multi-swarm PSO with particle reallocation strategy is applied to design IIR filters with null constraint and specified error in the stop band [21]. Wang and Chen [22] proposed the use of multi-objective optimization evolutionary algorithms with the aim of minimizing magnitude response error, phase response error and order of IIR filters. An improved Immune Algorithm (IA) was proposed by Tsai and Chou to solve the problem of designing optimal IIR filters [23].
The process of IIR filters’ design optimization is difficult because some constraints should be satisfied: (i) the determination of the lowest filter order; (ii) the filter stability; and (iii) the minimum value of passband and stopband ripple magnitudes. Because the Genetic Algorithms (GA) [24] are able to optimize complex and discontinuous functions that are difficult to analyze mathematically, some research [25,26,27,28,29] proposed different methods based on GA to solve the digital IIR filter design problems. A multi-crossover approach to design optimal GA-aided IIR filters was proposed by Chang [27]. Robust D-Stable IIR filters was designed by using GA where the stability criterion is embedded in the evolution of each generation [29]. Yu and Xinjie [28] proposed a coevolutionary GA that evolves coordinately as two different species: the control species and the coefficient species. A multi-parameter and multi-criterion optimization method based on a quantum genetic algorithm was proposed by Zhang et al. [25]. Stable IIR filters have been designed with the application of GA [26].
IIR filters’ designing problems can be formulated as a multi-modal optimization problem with multiple decision variables. The Gravitational Search Algorithm (GSA) is a search method based on a law of gravity [30] able to optimize multi-modal functions. Saha et al. [31,32] proposed a simple GSA and a GSA with Wavelet Mutation for the optimization of 8-th order IIR filter design. On the other hand, GSA has been combined with fuzzy logic for various applications [33,34,35,36]. A fuzzy logic-based adaptive gravitational search algorithm dedicated to the optimal tuning of fuzzy controllers for servo systems was proposed by Precup et al. [33]. GSA and fuzzy logic have been combined to design optimal Proportional Integral (PI) controllers for a class of servo systems characterized by saturation and dead zone static nonlinearities [34]. The idea of enhancing GSA using fuzzy logic is inspired from the exploration and exploitation principle in meta-heuristics. The fuzzy regulation of GSA parameters assures this principle. Fuzzy Gravitational Search Algorithms (FGSA) with dynamic alpha parameter value adaptation for the optimization of modular neural networks in echocardiogram and pattern recognition have been proposed [35,36]. Moreover, other versions of GSA with a fuzzy dynamic parameters adaptation have been proposed [37,38,39,40,41,42,43]. The improvements of GSA are based on the dynamic regulation of suitable parameters during the search procedure.
This paper aims to design optimal IIR filters with the help of a revised GSA and the design of suitable Fuzzy Inference Systems (FIS). The first contribution of the work is the re-definition of a parameter of GSA able to improve the search performances. The second one is the design of two FIS’s for GSA parameters adjustment. Both the approaches give rise to a Fuzzy Gravitational Search Algorithm (FGSA) with dynamic parameter adaptation. This algorithm is applied to design 8th order IIR filters.
2. IIR Filter Design
The relation between inputs and outputs of IIR filters is given by Equation (1) [44]:
where is the filter input, whereas is the output. The order of filters is defined by n with . By assuming that , the transfer function of IIR filter can be expressed as in Equation (2):
Assuming that , it follows that IIR filter frequency response becomes as in Equation (3)
where is the digital frequency.
Generally, the used approach to design IIR filters is to consider a Mean Square Error optimization problem [45,46,47]. MSE fitness function can be expressed as in Equation (4)
where is the number of frequency points used for the computation of the error fitness function; and are the filter’s desired and actual responses, respectively. The actual response is calculated through Equation (1), whereas the values of are set to be very close to ideal filters’ values. The difference between and is the error between the desired and the actual filter responses. The design goal is to minimize the MSE with proper adjustment of filter coefficients .
IIR filters’ optimization problem depends on the choice of transfer function coefficients and . Because the quality of a IIR filter depends on pass band ripple, stop band ripple and transition band, we propose a new fitness function that takes into account these three parameters. In particular, a good IIR filter has small pass and stop band ripple, and narrow transition band. In order to assure such constraints, the fitness function in Equation (5) is defined. In Equation (5), is the number of samples, is the pass band ripple, is the stop band ripple and is the absolute value of in Equation (3):
In particular, the absolute value of is calculated for each with (6)
where the values of are spaced frequency points between 0 and the pass band normalized edge frequency .
Similarly, for each
where the values of are spaced frequency points between 0 and the stop band normalized edge frequency . Note that, when , it follows that . In the same way, the stop band normalized edge frequency is achieved when ; thus, .
In order to design optimal IIR filters, a constrained minimization of the error fitness function defined in Equation (5) is needed. On the other hand, the stability is an important issue for IIR digital filters design [10,48,49]. Jiang and Kwan [50] proposed a stability constraint with a prescribed pole radius derived from the argument principle of complex analysis. The optimization of the proposed fitness function defined in Equation (5) follows the stability constraints in [50].
3. The Fuzzy Gravitational Search Algorithm
The proposed error fitness function in Equation (5) has to be minimized through an optimization algorithm. The design of our algorithm starts with a suitable definition of GSA parameter, which supplies the number of agents that apply the force to other individuals [30]. Such GSA parameter is referred as and it decreases linearly to 1 over the increment of iterations. The idea is to increase the convergence speed by defining as in Equation (8)
where i is the i-th iteration, is the number of agents and a parameter.
A key parameter in GSA is the gravitational constant [30], which depends on the initial value , the number of iterations N and the value of parameter (see Equation (9)):
The next step is to design two Fuzzy Inference Systems (FIS) able to adjust and parameter in Equation (8) and Equation (9), respectively. The tuning of these parameters must assure a good trade-off between exploration and exploitation of the search process. For this aim, we define a quantity which gives a measure of the population progress (see Equation (10)),
where is the error fitness mean value calculated on the agents. This computation is accomplished for each iteration , where N represents the iterations number.
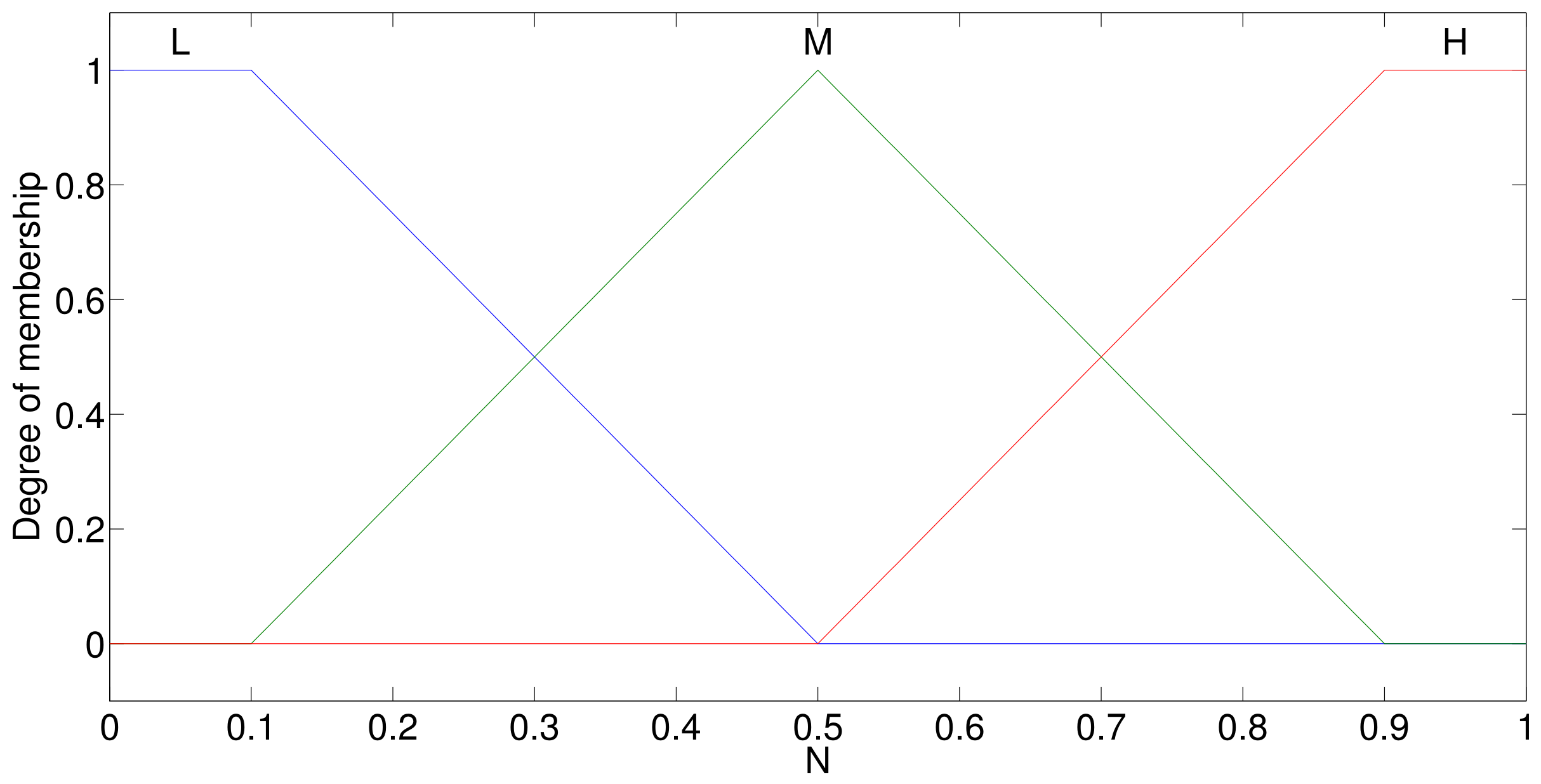
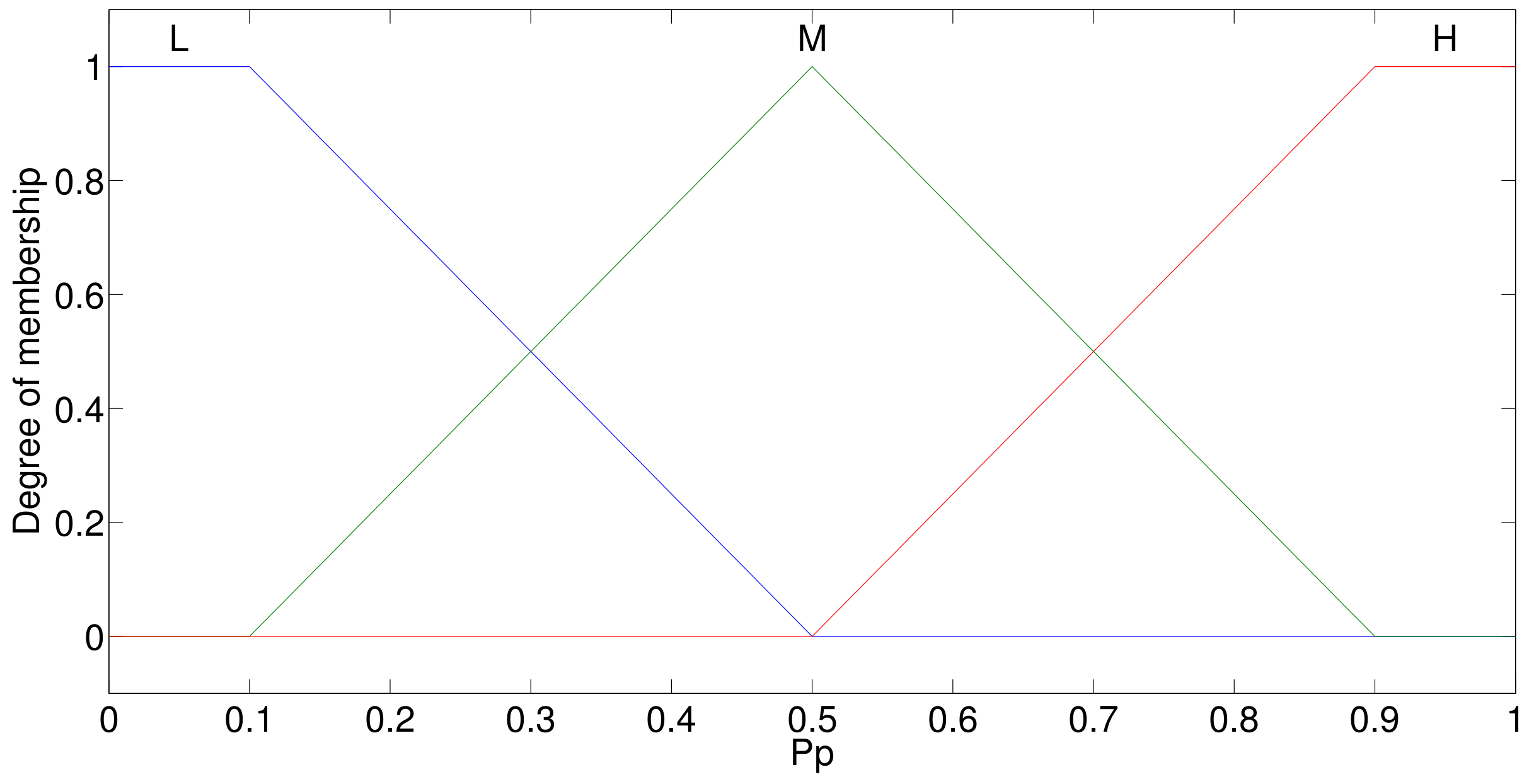
Generally, the accuracy of an FIS depends on the number of membership functions (MF): a higher membership functions number tends to cause an increase in FIS. Moreover, the number of MFs has a huge impact on the system complexity; therefore, an optimal trade-off between accuracy and complexity is needed. Thus, the fuzzy inputs definition for the first FIS depends on this issue. We define the iterations number N and the population progress as fuzzy inputs with membership functions Low (L), Medium (M) and High (H) (see Figure 1 and Figure 2). In order to achieve more refined values of , nine membership functions for the fuzzy output are defined (see Figure 3). The choice of triangular/trapezoidal MFs depends on the performance of FIS for a generic system [51].
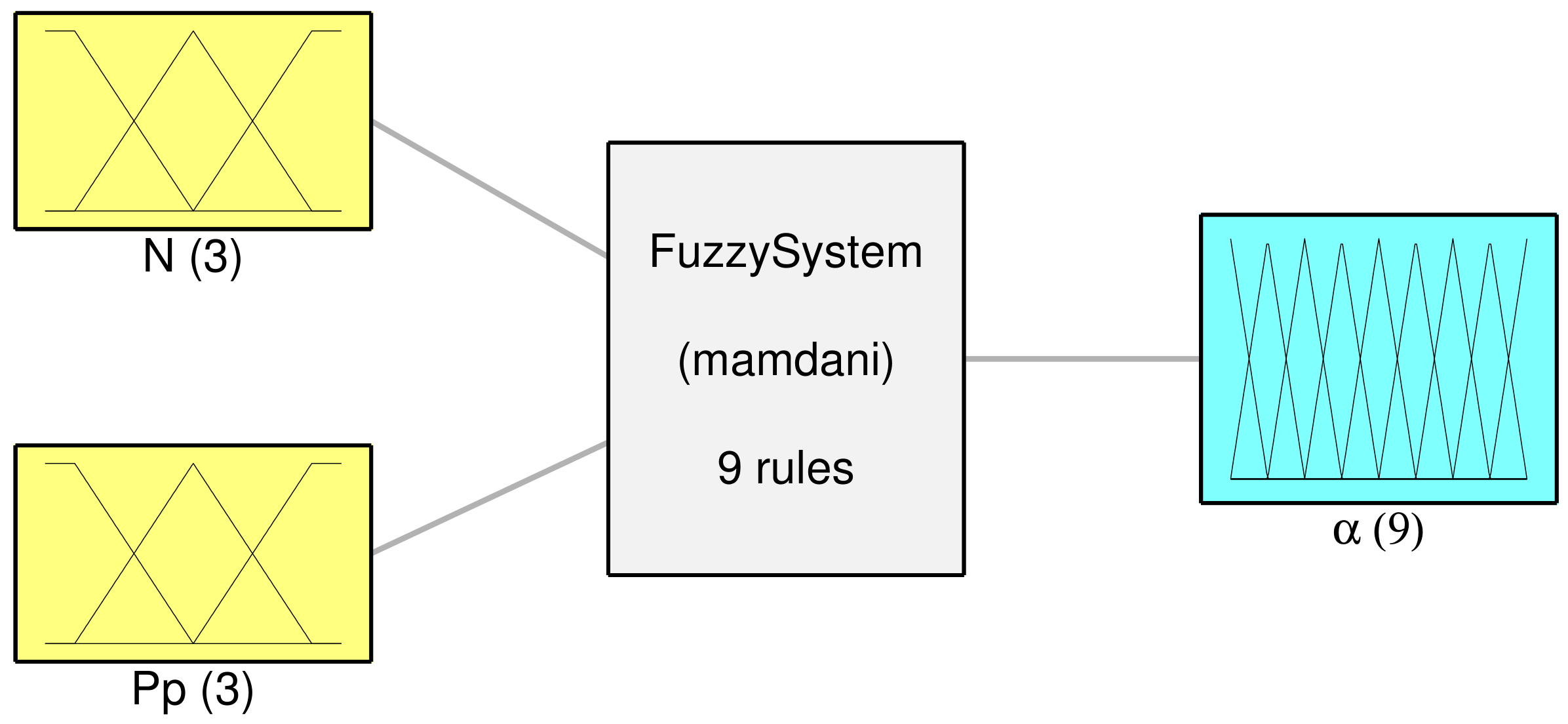
The definition of fuzzy rules for FIS- depends on GSA behavior. To assure exploration at the beginning of iterations, the agents must have a huge acceleration: this condition is achieved with low values of (see Equation (9)). A lack of improvement means premature convergence: supplying a lower value of , the agents escape from local optima. Low values of are required when GSA lies in the middle of the procedure and there are no improvements. Very very high values of are necessary with improvements at the end of iterations. Table 1 shows FIS- rules. The architecture of FIS- is shown in Figure 4.
The main step in the design of an FIS is the definition of fuzzy rules. Table 1 shows the fuzzy rules for FIS-. The rules are based on the behavior of GSA. At the beginning of iterations, i.e., when , to assure exploration, the agents must have a big acceleration; therefore, a low value of is necessary. In fact, if is low, then G increases (see Equation (9)), and then the acceleration tends to increase [30]. On the other hand, an early lack of improvement, that is and , is a sign of premature convergence: with a very very low value of , the individuals can escape from local optima. When GSA is at the middle of the procedure () and there is lack of improvement (), the values of must be basically low. At the end of the iterations (), if there is an improvement in the optima research (), then must be very very high. High values of tend to decrease the value of the gravitational constant and therefore the acceleration. Figure 4 shows the architecture of FIS- to adjust the parameter .
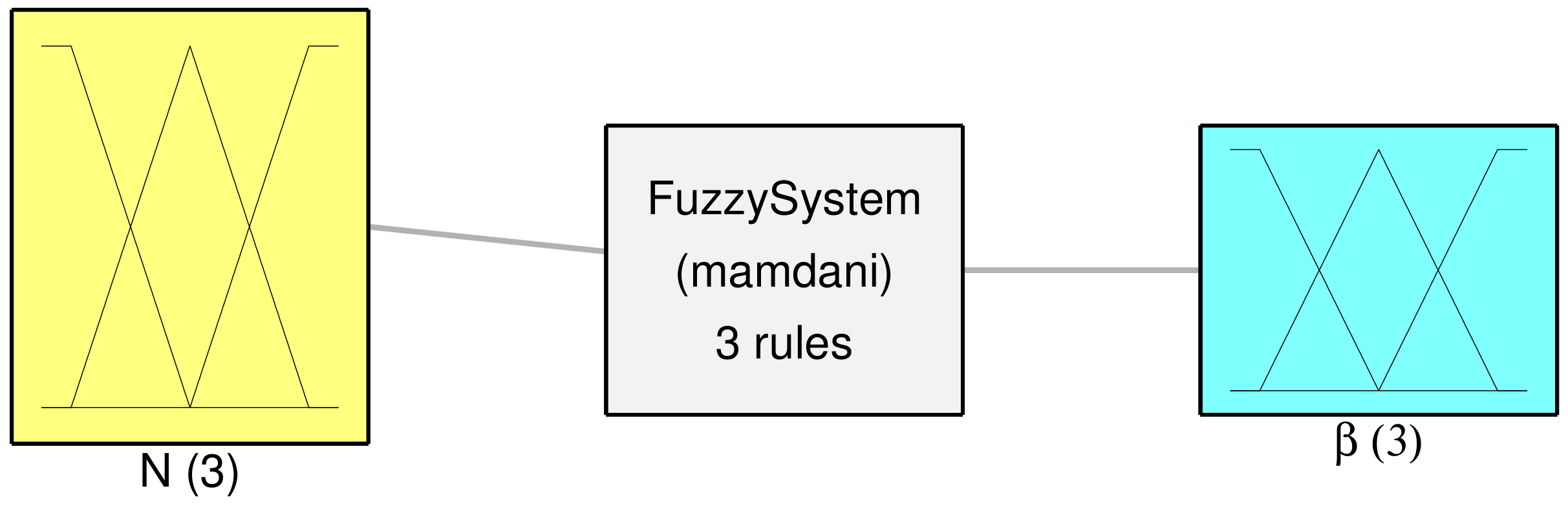
The second FIS (referred as FIS-) has the task of adjusting the parameter of quantity defined in Equation (8). This FIS has one input and one output as shown in Figure 5. The fuzzy input is the number of iterations N that has three triangular/trapezoidal membership functions: Low (L), Medium (M) and High (H) as in FIS- (see Figure 1). In this way, FIS- has three rules and thus we define three possible values of the fuzzy output . Figure 6 shows the three triangular/trapezoidal membership functions Low (L), Medium (M) and High (H) of . The definition of the fuzzy rules is based on the fact that there is a tendency for to decrease with higher iteration number. The base rule is shown in Table 2 and Figure 5 illustrates the architecture of FIS-.
The target of the search procedure is to find the best coefficients and of H with , where n is the order of IIR filter. In order to do this, Algorithm 1 is proposed. Both of the designed FISs are used in the optimization process.
| Algorithm 1 Fuzzy Gravitational Search Algorithm |
| 1: Random initialization of the coefficients (see S1). 2: Settings of the fuzzy output extrema values and initialization of the first two values of (see S2). 3: For each iteration from 1 to (see S3): 4: Search space boundaries control (see S3.1) 5: Agents evaluation (see S3.2) 6: Agents masses calculation (see S3.3). 7: Gravitational constant calculation (see S3.4). 8: computation (see S3.5) 9: Agents acceleration computation (see S3.6). 10: Population progress calculation (see S3.7). 11: Computation of fuzzy- (see S3.8). 12: Agents velocity and position computation (see S3.9). 13: Final computation of the best coefficients (see S4). |
S1. Initialize randomly the coefficients for each agent in the search space, where n is the order of IIR filter. Note that the number of coefficients is equal to and is the number of agents. Let and be the extrema of search interval, the matrix of coefficients for all agents is computed by
for each agent and coefficient ; is a function that generates random numbers between 0 and 1.
S2. Fix the extrema value and of fuzzy output and the initial value for the first two iterations and .
S3. For each iteration from 1 to , execute the steps from S3.1 to S3.9.
S3.1. Check the search space boundaries for agents according to the coefficients in X; agents that go out of the search space, are reinitialized randomly, i.e., for the i-th agent such that in the j-th coefficient or , compute by using Equation (11).
S3.2. Evaluate the agents; compute the fitness of each agent by passing the coefficients of X to the test function and select the minimum fitness value among agents.
S3.3. Calculate the masses of each agent, i.e., Equations (12)–(16), where and are the active and passive gravitational masses related to agent j and i, respectively, and is the inertial mass of i-th agent at iteration t [30]:
S3.4. Compute the gravitational constant G (see Equation (9)) according to the value of , with .
S3.5. Compute as defined by (8); is computed by changing by means of FIS-. The iteration number t is normalized in through the formula , where is the normalized iteration number. This normalization is necessary because the fuzzy inputs only accept values in . The normalized iteration number is passed as an input to FIS-, which gives as output the parameter with values in . This value is normalized between and with the formula
Therefore, the new value of is computed by Equation (8).
S3.6. According to , calculate the acceleration of each agent in gravitational field, see Equations (9) and (18)–(22),
where , with n filter order.
S3.7. Compute the population progress as defined in Equation (10).
S3.8. The values of normalized iteration number and population progress are passed as inputs to FIS-, which gives a value of between 0 and 1, denoted by . This value is normalized between and with the formula
S3.9. Update the velocity v and coefficients in X of i-th agent, with the Equations (24) and (25), respectively,
where
- ,
- ,
- ...,
- ,
- ,
- ,
- ...,
- .
S4. Give in output the values of best coefficients .
FGSA designed in [35,36] have a more simple fuzzy rule base than FIS-: the just one fuzzy input is the number of iterations. A similar approach has been introduced by Sombra [42] with a fuzzy system characterized by three fuzzy rules to adjust the parameter of GSA. However, Algorithm 1 guarantees a high accuracy in the computation of , with a minor adding of complexity compared to the mentioned approaches. On the other hand, Khabisi and Rashedi [43] designed an FGSA with 36 fuzzy rules, without achieving relevant results. The dynamic Type-2 fuzzy logic adaptation proposed in [39] improves the convergence performances with an increase of the system complexity. The parameter has been adjusted by Olivas [38] directly as output fuzzy, whereas the proposed algorithm tunes the parameter with a new definition of (see Equation (8)). This fact assures a better regulation of during the steps of our FGSA. Moreover, GSA with Wavelet Mutation proposed in [32] has the drawbacks of the rigorous trials required for the tuning of control parameters for the wavelet mutation method. Finally, Algorithm 1 supplies a good trade-off between accuracy and complexity compared with the mentioned approaches.
4. Experimental Results
Algorithm 1 is compared with the application of GSA and DE for the design of IIR filters. All optimization algorithms are run in the MATLAB environment (R2016a, MathWorks, Natick, MA, USA) on 2.20 GHz-speed processor. In particular, the fuzzy toolbox of MATLAB is exploited. This tool gives the possibility of designing Fuzzy Inference Systems based on the Mamdani inference method [52]. Because the MATLAB environment allows for referring to objects created by tools with the MATLAB code, the settings of the designed FISs can be dynamically modified. Moreover, the parameters of the fuzzy part of Algorithm 1 are computed by using the Center of the Mass defuzzification method. The MATLAB environment has been also exploited for its workspace data storage capability.
Referring to FGSA, the number of agents is set to 50 and the iterations number N is equal to 500. Moreover, , and , in Equations (23) and (17), respectively. The value of in GSA is 20 (as in [30]), and . In DE, the population size is 50, the crossover probability is and the maximum number of iterations is 500.
Equation (11) computes the values of coefficients in H: we assume a range from to with a filter order , which is . The design specifications of Low Pass (LP), High Pass (HP), Band Pass (BP) and Stop Band (SB) IIR filters are shown in Table 3, with w frequency width. Moreover, the frequency range from 0 to is divided into equally spaced sample points. DE, GSA and FGSA are run for 30 times to get the best solutions and the results in Table 4, Table 5, Table 6, Table 7 and Table 8 are the average (first sub-row) and standard deviation (second sub-row) on 30 experiments.
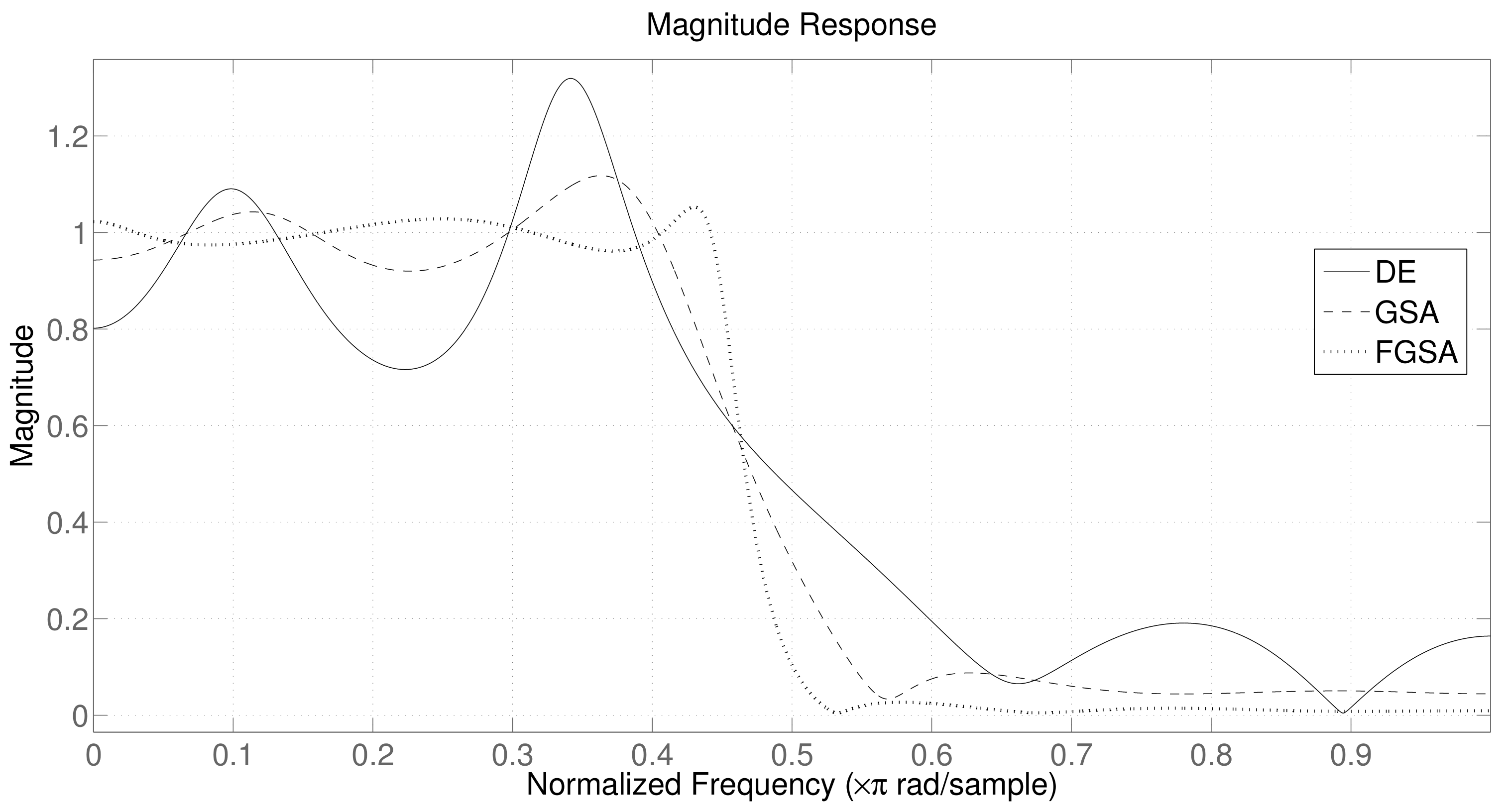
Table 4 shows that the proposed algorithm gives good results for LP filters because pass band ripple, stop band ripple and transition band are less than DE and GSA values. This fact is confirmed by comparing the magnitude response over normalized frequency of DE, GSA and FGSA (see Figure 7) for LP filters. By comparing FGSA and GSA, the pass band ripple (PB-ripple in the table) is improved by , the stop band ripple (SB-ripple) is reduced by and the transition band (tb) is improved by . Moreover, the robustness of the proposed approach is analyzed by computing the standard deviation on 30 experiments. In fact, the robustness depends on standard deviation values: a result is more robust if the data have a smaller standard deviation. Observing Table 4, we can note that standard deviation values of GSA and FGSA are about the same, whereas DE results show less robustness than GSA and FGSA. Finally, the proposed approach shows a good robustness for the design of LP filters.
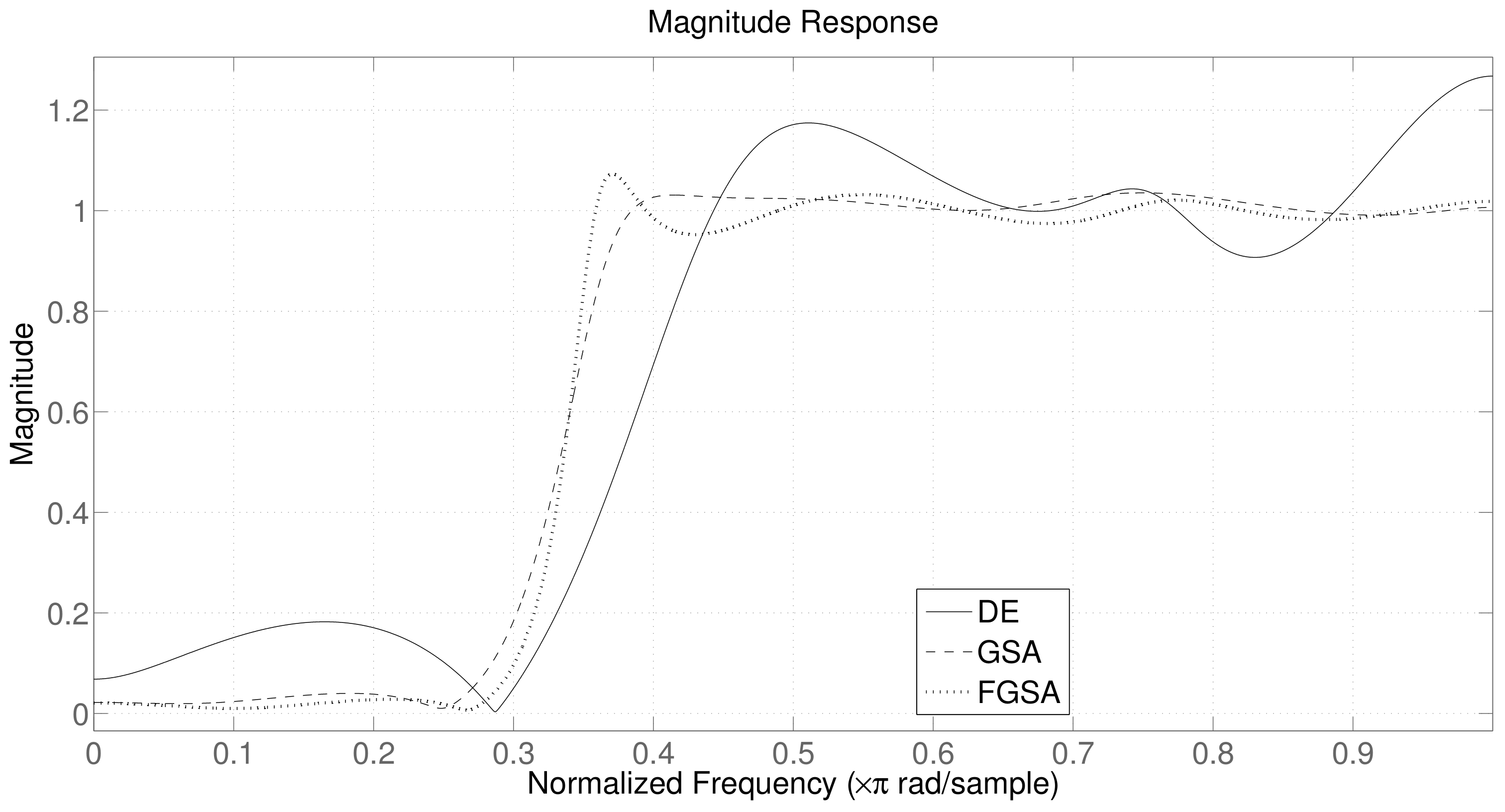
Table 5 shows the average pass and stop band ripples and transition band for HP filters. In this case, FGSA is better than DE. Moreover, FGSA has about the same value of stop band ripple of GSA, but pass band ripple and transition band are greater than GSA. However, FGSA gives a reasonable trend of magnitude response over frequency (see Figure 8). As in LP filters’ results, the outcomes on 30 experiments show a good robustness of FGSA (see the standard deviation values in Table 5).
For BP filters, FGSA and GSA are better than DE (see Table 6). The stop band ripple of FGSA is less than GSA, whereas pass band ripple and transition band are greater than GSA. Figure 9 shows a symmetric trend of GSA magnitude response. Moreover, good results of robustness are achieved (see Table 6).
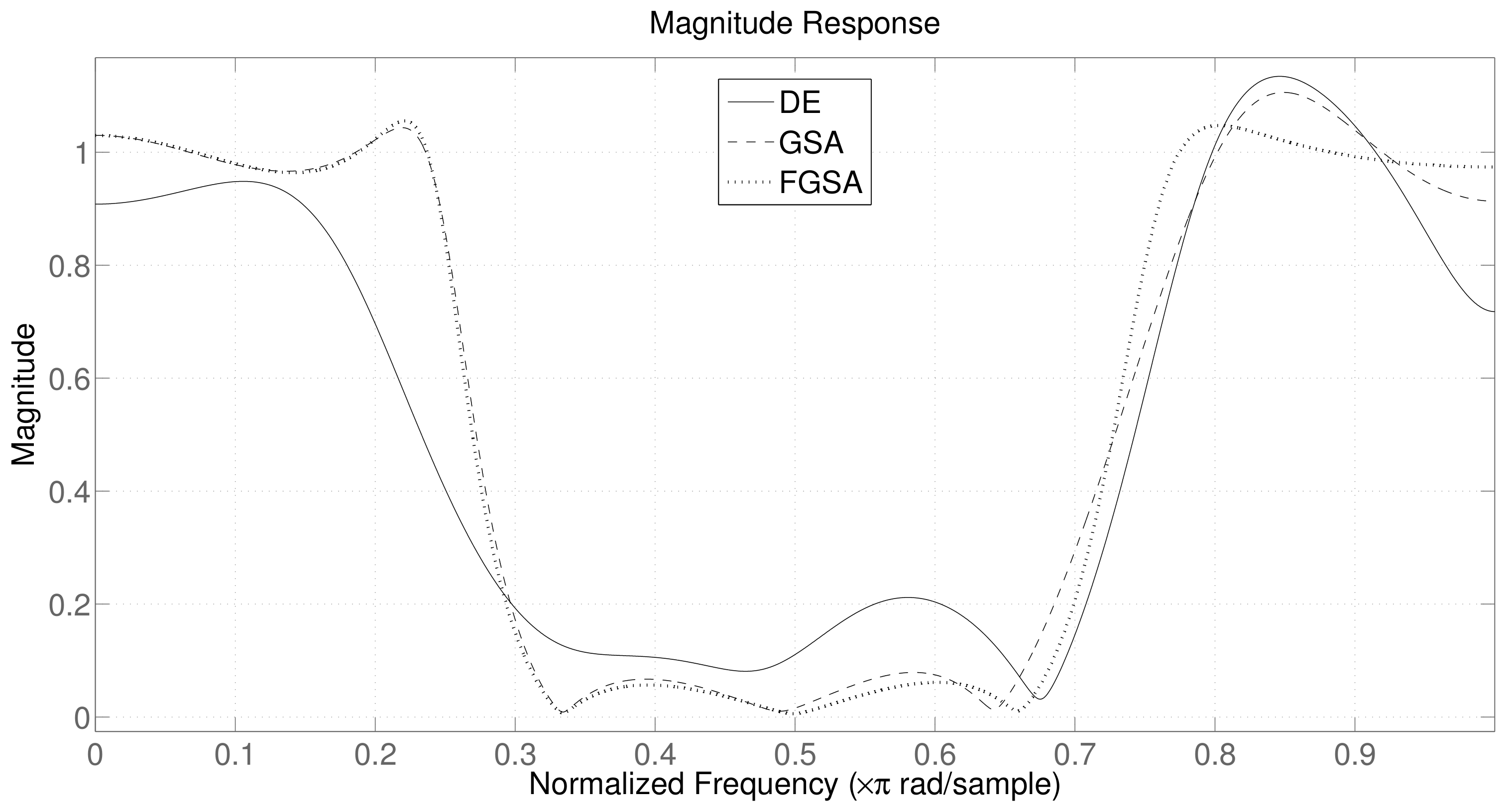
Algorithm 1 gives good results for SB filters, where pass band ripple and transition band are better than DE and GSA (see Table 7). In particular, FGSA reduces the pass band ripple by with respect to GSA. Moreover, Figure 10 shows that FGSA has a trend very close to an ideal SB filter. Table 7 shows low standard deviation values for FGSA: this fact assures a good robustness of the developed method.
Usually, the search algorithm computation time is a measure of the procedure convergence speed. On the other hand, the computation time is not good to evaluate the convergence speed because it depends on hardware performances, programming language and designer skills. A good way to evaluate the convergence speed is to consider the objective function evaluations number up to the minimum value of the function (see [23,31,32,33,34,53]). Finally, we consider the ratio between the fitness function calculations number and the evaluations number N: such ratio defines the convergence rate denoted by (see Equation (26)):
Table 8 contains the convergence profile results of DE, GSA and FGSA for 8th order LP, HP, BP and SB IIR filters on 30 experiments. Each row contains the best value of fitness error function and standard deviation obtained by using the specified algorithm. In the table, denotes the optimal value of fitness function for the filter , denotes the optimal value of fitness function for the filter , denotes the optimal value of fitness function for the filter and denotes the optimal value of fitness function for the filter . Note that FGSA shows a better design performance for LP and SB filters, whereas there is a certain equilibrium between FGSA and GSA for HP and BP filters. Moreover, DE is the worst IIR filter design algorithm in terms of fitness function minimization. Referring to robustness, DE, GSA and FGSA have about the same low values of standard deviation of order (see Table 8). This fact assures a very good robustness of the proposed approach.
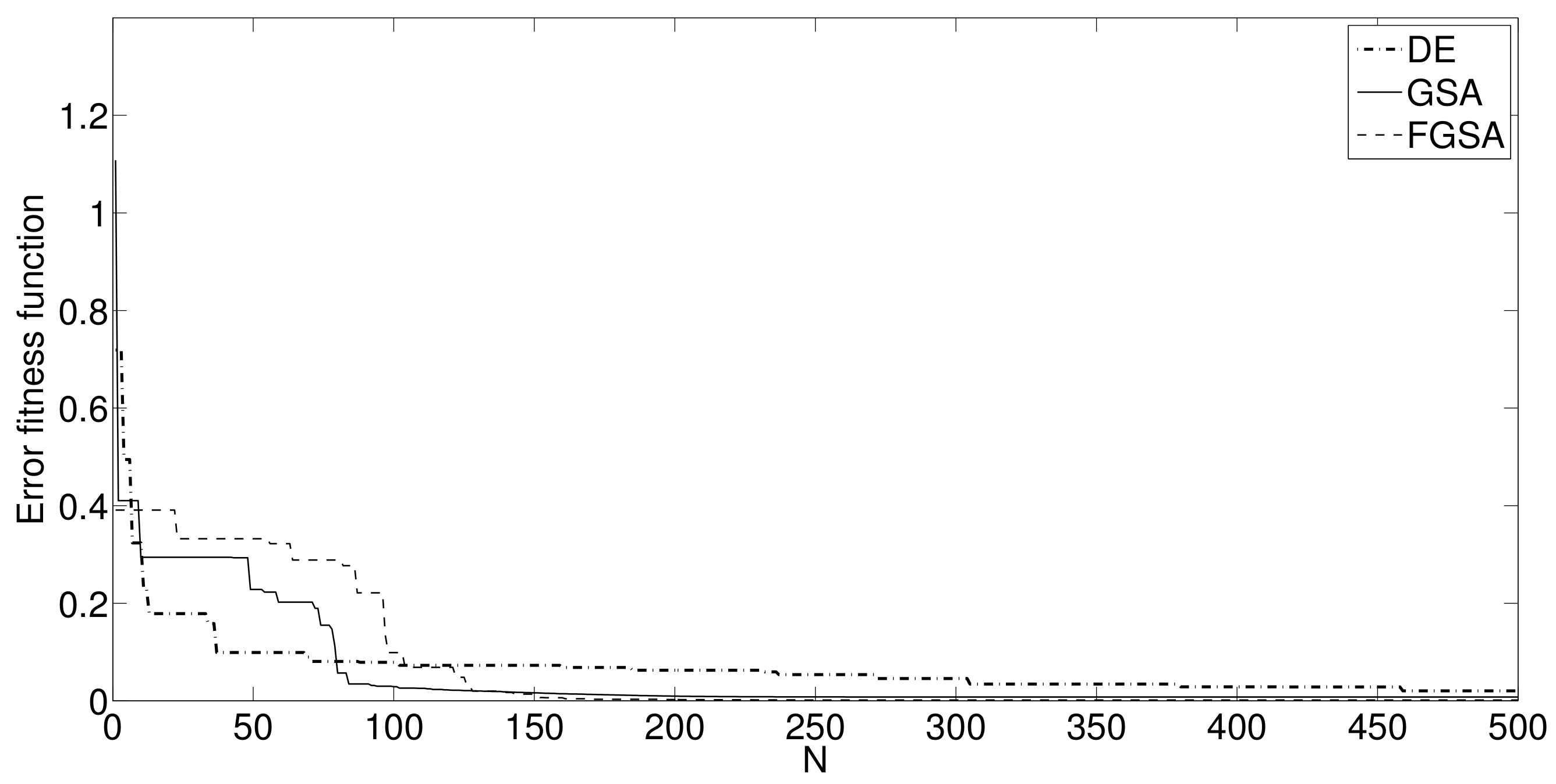
Table 9 shows the convergence rates of DE, GSA and FGSA for 8th order LP, HP, BP and SB IIR filters. They are referred to as , , and for LP, HP, BP and SB filters, respectively. The analysis on the convergence rate results shows that FGSA has a convergence rate better than GSA for LP and HP filters, whereas GSA is better than FGSA for BP and SB filters. However, FGSA gives the best results because the improvements on convergence rate are and for LP and HP, respectively, versus and of GSA for BP and SB. Moreover, DE gives the worst values of convergence rate. Figure 11 shows the trend of the error fitness function over the number of iteration N for LP filters by using DE, GSA and FGSA. Note that FGSA has a better convergence rate than GSA and DE.
Finally, FGSA achieves the best compromise between IIR filter design performances and convergence rate with a good robustness. These facts make FGSA better than DE and GSA for the optimal design of 8th order IIR filters.
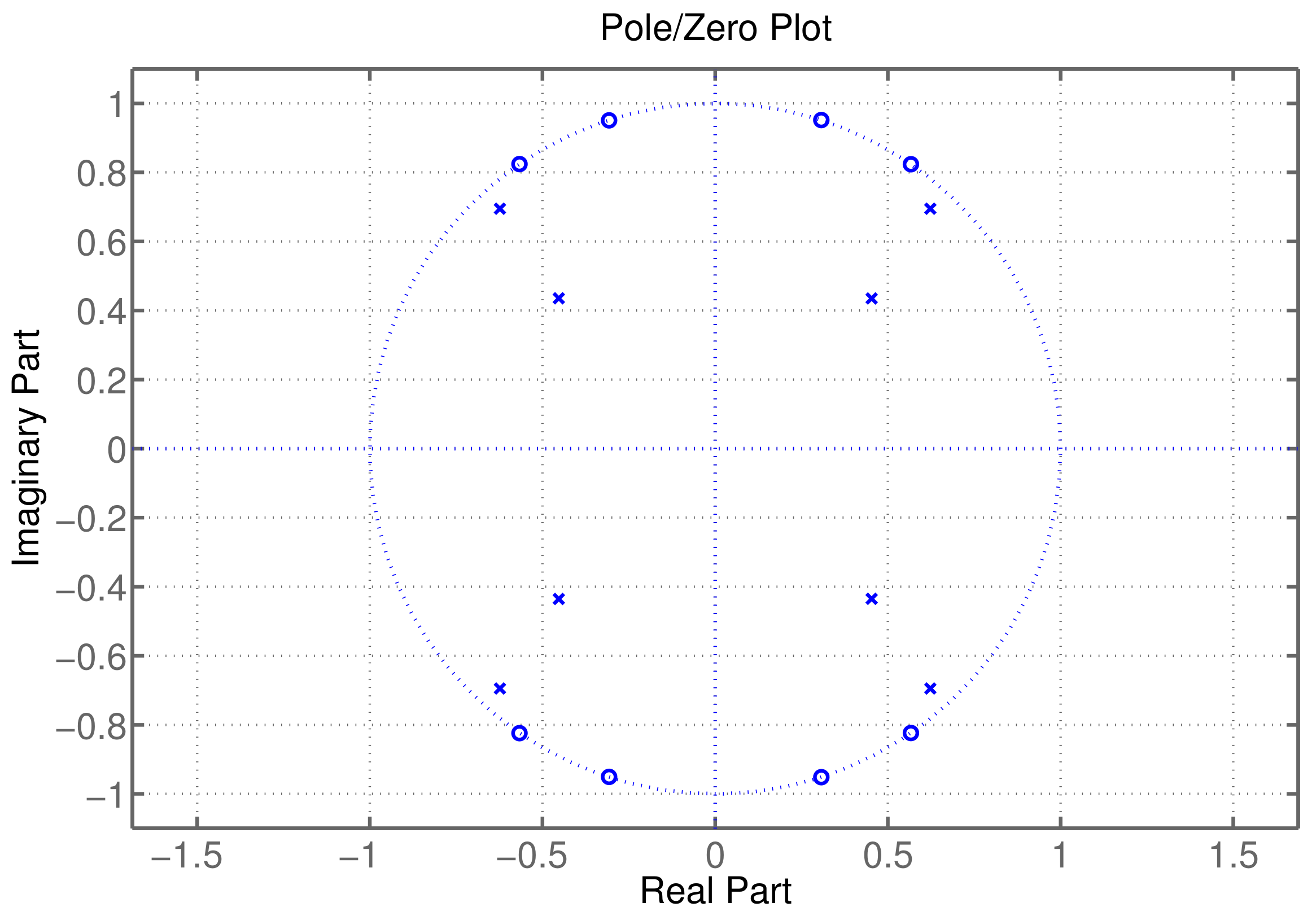
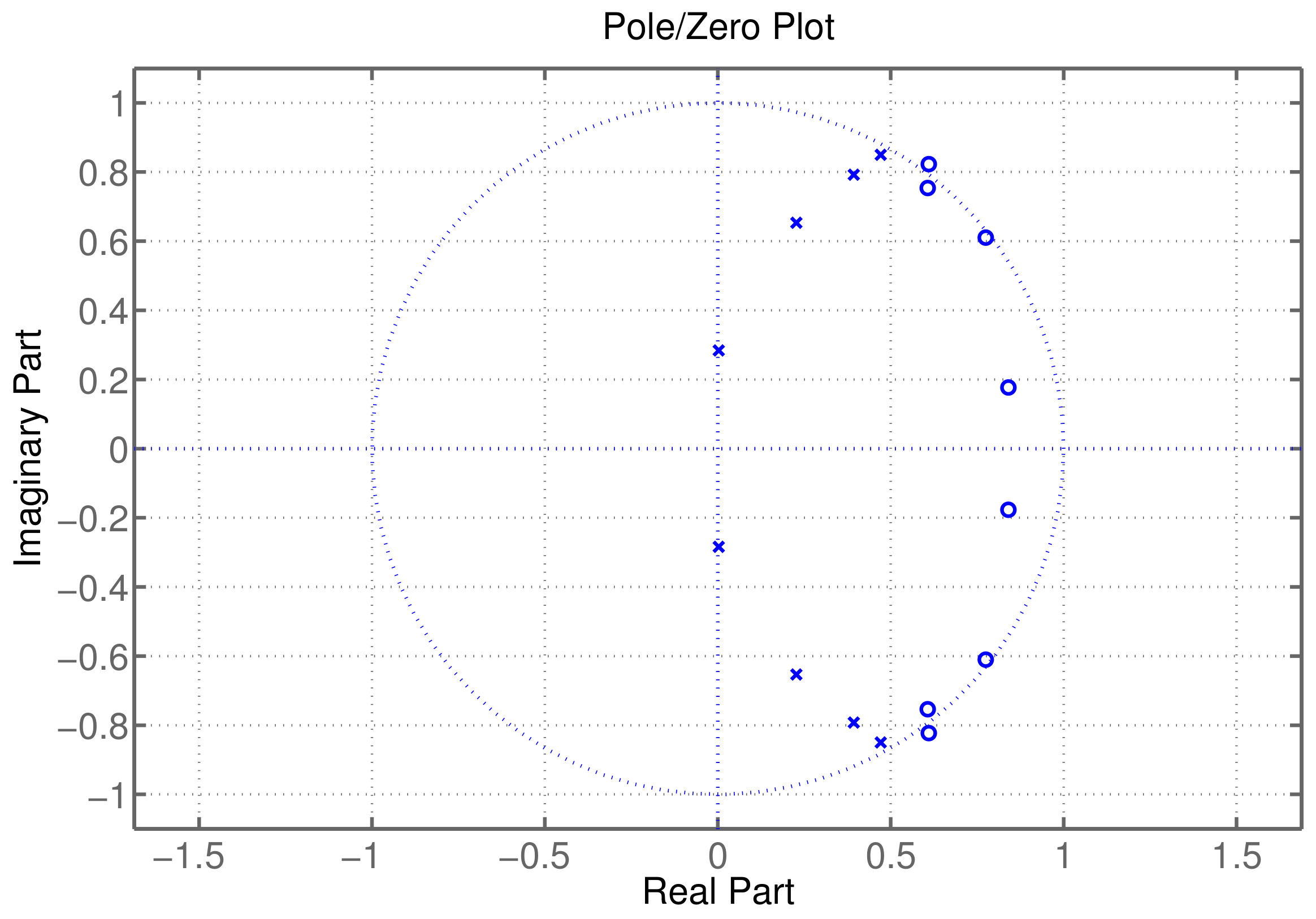
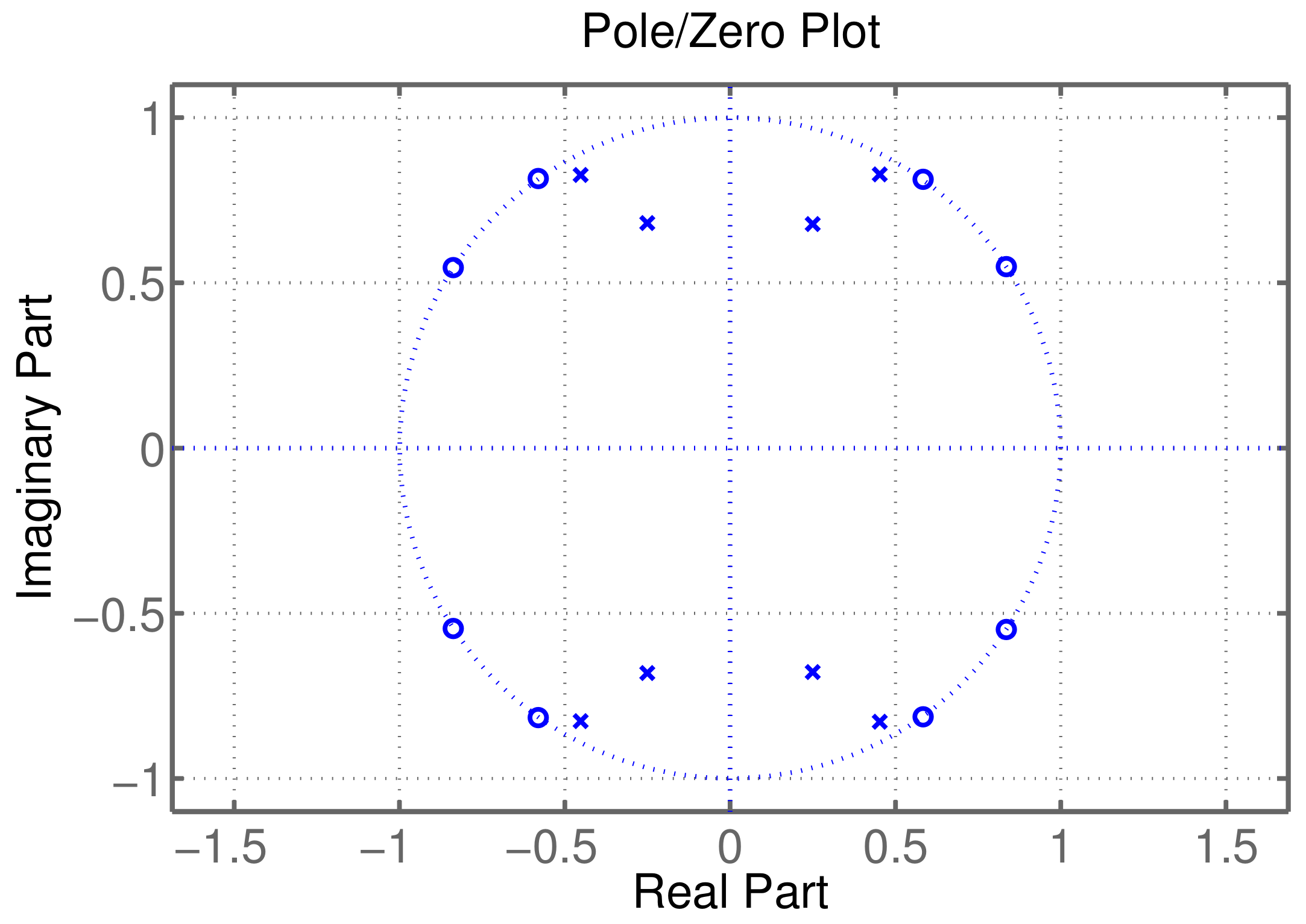
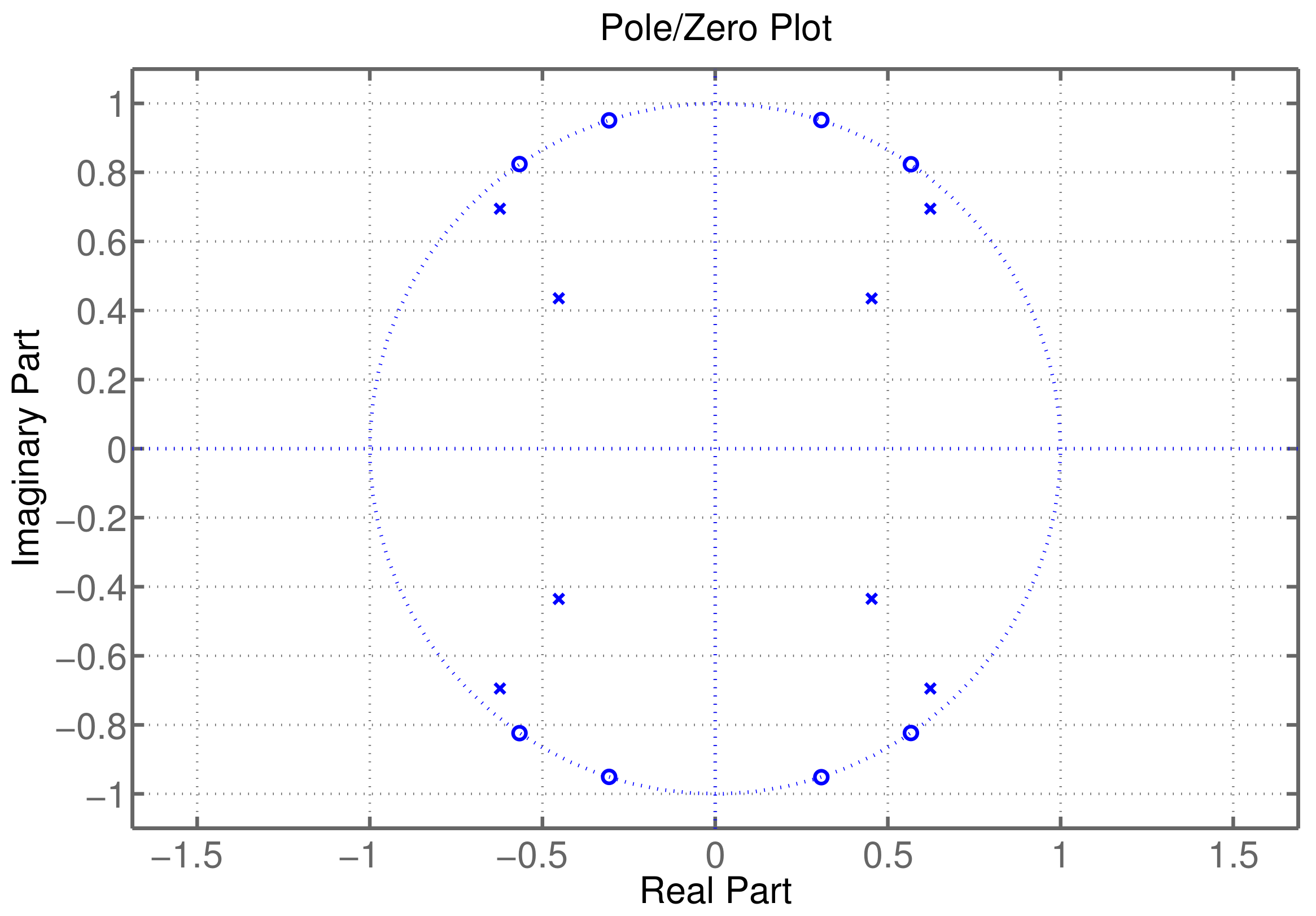
Stability analysis of the designed IIR filters is shown in Figure 11, Figure 12, Figure 13, Figure 14 and Figure 15, where the circle markers represent the zeros, whereas the cross markers are the poles. The pole-zero plots demonstrate the existence of poles within the unit circle, which assures the Bounded Input Bounded Output (BIBO) stability condition. However, adding constraints to optimization algorithms may cause an increase of computational complexity. Recently, Pelusi et al. [54] have proposed a Neural and Fuzzy Gravitational Search Algorithm (NFGSA) able to search local optima with low complexity. The future challenge will be the application of NFGSA for designing optimal IIR filters with fuzzy stability constraints.
5. Conclusions
An intelligent algorithm able to optimize the design of 8th order IIR filters has been described. Because the quality of a filter depends on pass band ripple, stop band ripple and transition band, the target of the paper is the optimization of an error fitness function that depends on these parameters. Such task is accomplished through a suitable optimization algorithm. The proposed algorithm is a combination between fuzzy techniques and GSA. In particular, two fuzzy systems able to adjust some parameters of GSA have been designed. Moreover, to improve GSA, one of these parameters has been re-defined. Our algorithm has been compared with DE and GSA for the design of IIR filters. The results show that FGSA is the best algorithm to design 8th order IIR filters in terms goodness, robustness and convergence rate. Moreover, the proposed algorithm always gives a stable filter. Further research tasks will focus on: (1) the improvement of the fitness function definition; (2) the design of FISs for other GSA parameters assuring a good compromise between best solution and high convergence speed for the design of IIR filters; and (3) the comparison with other optimization algorithms such as Particle Swarm Algorithm and Genetic Algorithms. A future fascinating challenge will be the design of optimal IIR filters with fuzzy stability constraints.
Author Contributions
Danilo Pelusi and Raffaele Mascella conceived and designed the experiments; Danilo Pelusi performed the experiments; Danilo Pelusi, Raffaele Mascella and Luca Tallini analyzed the data; Danilo Pelusi contributed reagents/materials/analysis tools; and Danilo Pelusi wrote the paper.
Conflicts of Interest
We declare that there is not conflict of interest.
References
- Antoniou, A. Digital Signal Processing: Signals, Systems, and Filters; McGraw-Hill: New York, NY, USA, 2005. [Google Scholar]
- Lu, W.S.; Antoniou, A. Design of digital filters and filter banks by optimization: A state of the art review. In Proceedings of the 2000 10th European Signal Processing Conference, Tampere, Finland, 4–8 September 2000; Volume 1, pp. 351–354. [Google Scholar]
- Mikhael, R.; Agathoklis, P.; Xiao, C. Design of linear-phase recursive filters by optimization of model reduced non-recursive filters. In Proceedings of the 2003 PACRIM IEEE Pacific Rim Conference on Communications, Computers and Signal Processing, Ictoria, BC, Canada, 28–30 August 2003. [Google Scholar]
- Chen, B.S.; Peng, S.C.; Chiou, B.-W. IIR filter design via optimal Hankel–norm approximation. IEE Proc. G Circuits Devices Syst. 1992, 139, 586–590. [Google Scholar] [CrossRef]
- Lu, W.S.; Hinamoto, T. Optimal Design of IIR Frequency-Response-Masking Filters Using Second-Order Cone Programming. IEEE Trans. Circuits Syst. 2003, 50, 1401–1412. [Google Scholar]
- Lu, W.S.; Hinamoto, T. Optimal design of IIR digital filters with robust stability using conic-quadratic-programming. IEEE Trans. Signal Process. 2003, 51, 1581–1592. [Google Scholar]
- Lai, X.; Lin, Z. Minimax Phase Error Design of IIR Digital Filters With Prescribed Magnitude and Phase Responses. IEEE Trans. Signal Process. 2012, 60, 980–986. [Google Scholar] [CrossRef]
- Nongpiur, R.C.; Shpak, D.J.; Antoniou, A. Design of IIR Digital Differentiators Using Constrained Optimization. IEEE Trans. Signal Process. 2014, 62, 1729–1739. [Google Scholar] [CrossRef]
- Lai, X.; Lin, Z. Iterative Reweighted Minimax Phase Error Designs of IIR Digital Filters With Nearly Linear Phases. IEEE Trans. Signal Process. 2016, 64, 2416–2428. [Google Scholar] [CrossRef]
- Lang, M.C. Least-squares design of IIR filters with prescribed magnitude and phase responses and a pole radius constraint. IEEE Trans. Signal Process. 2000, 48, 3109–3121. [Google Scholar] [CrossRef]
- Duarte, C.; Barner, K.E.; Goossen, K. Design of IIR Multi-Notch Filters Based on Polynomially-Represented Squared Frequency Response. IEEE Trans. Signal Process. 2016, 64, 2613–2623. [Google Scholar] [CrossRef]
- Pei, S.C.; Shyu, J.J.; Huang, Y.D.; Chan, C.H. Improved Methods for the Design of Variable Fractional-Delay IIR Digital Filters. IEEE Trans. Circuits Syst. 2012, 59, 989–1000. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential Evolution: A Simple and Efficient Heuristic for Global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Storn, R. Differential evolution design of an IIR-filter with requirements for magnitude and group delay. In Proceedings of the IEEE International Conference on Evolutionary Computation (ICEC), Nagoya, Japan, 20–22 May 1996; pp. 268–273. [Google Scholar]
- Storn, R. Designing nonstandard filters with differential evolution. IEEE Signal Process. Mag. 2005, 22, 103–106. [Google Scholar] [CrossRef]
- Pan, S.T. Evolutionary Computation on Programmable Robust IIR Filter Pole-Placement Design. IEEE Trans. Instrum. Meas. 2011, 60, 1469–1479. [Google Scholar] [CrossRef]
- Karaboga, N. Digital IIR Filter Design Using Differential Evolution Algorithm. EURASIP J. Appl. Signal Process. 2005, 8, 1269–1276. [Google Scholar] [CrossRef]
- Dai, C.; Chen, W.; Zhu, Y. Seeker Optimization Algorithm for Digital IIR Filter Design. IEEE Trans. Ind. Electron. 2010, 57, 1710–1718. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. Proc. Int. Conf. Neural Netw. 1995, 4, 1942–1948. [Google Scholar]
- Hartmann, A.; Lemos, J.M.; Costa, R.S.; Vinga, S. Identifying IIR filter coefficients using particle swarm optimization with application to reconstruction of missing cardiovascular signals. Eng. Appl. Artif. Intell. 2014, 34, 193–198. [Google Scholar] [CrossRef]
- Aimi, H.; Suyama, K. Multi-Constrained IIR Filter Design Using PSO. In Proceedings of the International Symposium on Electronics and Smart Devices, Bandung, Indonesia, 29–30 November 2016; pp. 258–263. [Google Scholar]
- Wang, Y.; Li, B.; Chen, Y. Digital IIR filter design using multi-objective optimization evolutionary algorithm. Appl. Soft Comput. 2011, 12, 1851–1857. [Google Scholar] [CrossRef]
- Tsai, J.T.; Chou, J.H. Design of Optimal Digital IIR Filters by Using an Improved Immune Algorithm. IEEE Trans. Signal Process. 2006, 54, 4582–4596. [Google Scholar] [CrossRef]
- Holland, J. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; Bradford Books; MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Zhang, G.X.; Jin, W.D.; Jin, F. Multi-criterion satisfactory optimization method for designing IIR digital filters. In Proceedings of the ICCT 2003 International Conference on Communication Technology, Beijing, China, 9–11 April 2003; pp. 1484–1490. [Google Scholar]
- Liu, Y.; Shao, S.Q.; Zhao, H.; Liao, X.F.; Yu, J.B. An application of genetic algorithms with guiding strategy in the design of digital filters. In Proceedings of the Communications, Circuits and Systems, Chengdu, China, 27–29 June 2004; pp. 1141–1145. [Google Scholar]
- Chang, W.-D. Coefficient estimation of IIR filter by a multiple crossover genetic algorithm. Comput. Math. Appl. 2006, 51, 1437–1444. [Google Scholar] [CrossRef]
- Yu, Y.; Yu, X. Cooperative Coevolutionary Genetic Algorithm for Digital IIR Filter Design. IEEE Trans. Ind. Electron. 2007, 54, 1311–1318. [Google Scholar] [CrossRef]
- Pan, S.T. Design of Robust D-Stable IIR Filters Using Genetic Algorithms With Embedded Stability Criterion. IEEE Trans. Signal Process. 2009, 57, 3008–3016. [Google Scholar]
- Rashedi, E.; Nezamabadi-Pour, H.; Saryazdi, S. GSA: A Gravitational Search Algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Saha, S.K.; Kar, R.; Mandal, D.; Ghoshal, S.P. Gravitation search algorithm: Application to the optimal IIR filter design. J. King Saud Univ. Eng. Sci. 2014, 26, 69–81. [Google Scholar] [CrossRef]
- Saha, S.K.; Kar, R.; Mandal, D.; Ghoshal, S.P. Optimal IIR filter design using Gravitational Search Algorithm with Wavelet Mutation. J. King Saud Univ. Comput. Inf. Sci. 2015, 27, 25–39. [Google Scholar] [CrossRef]
- Precup, R.E.; David, R.C.; Petriu, E.M.; Preitl, S.; Radac, M.B. Fuzzy logic-based adaptive gravitational search algorithm for optimal tuning of fuzzy controlled servo systems. IET Control Theory Appl. 2013, 7, 99–107. [Google Scholar] [CrossRef]
- Precup, R.E.; David, R.C.; Petriu, E.M.; Preitl, S.; Radac, M.B. Adaptive GSA-based optimal tuning of PI controlled servo systems with reduced process parametric sensitivity, robust stability and controller robustness. IEEE Trans. Cybern. 2014, 44, 1997–2009. [Google Scholar] [CrossRef] [PubMed]
- Gonzalez, B.; Valdez, F.; Melin, P.; Prado-Arechiga, G. Fuzzy logic in the gravitational search algorithm enhanced using fuzzy logic with dynamic alpha parameter value adaptation for the optimization of modular neural networks in echocardiogram recognition. Appl. Soft Comput. 2015, 37, 245–254. [Google Scholar] [CrossRef]
- Gonzalez, B.; Valdez, F.; Melin, P.; Prado-Arechiga, G. Fuzzy logic in the gravitational search algorithm for the optimization of modular neural networks in pattern recognition. Exp. Syst. Appl. 2015, 42, 5839–5847. [Google Scholar] [CrossRef]
- Pelusi, D.; Mascella, R.; Tallini, L. Revised gravitational search algorithms based on evolutionary-fuzzy systems. Algorithms 2017, 10, 44. [Google Scholar] [CrossRef]
- Olivas, F.; Valdez, F.; Ostillo, O. Gravitational Search Algorithm with parameter adaptation through a fuzzy logic system. In Nature-Inspired Design of Hybrid Intelligent Systems; Studies in Computational Intelligence; Springer: New York, NY, USA, 2016; Volume 667, pp. 391–405. [Google Scholar]
- Gonzalez, B.; Valdez, F.; Melin, P. A Gravitational Search Algorithm Using Type-2 Fuzzy Logic for Parameter Adaptation. In Nature-Inspired Design of Hybrid Intelligent Systems; Studies in Computational Intelligence; Springer: New York, NY, USA, 2016; Volume 667, pp. 127–138. [Google Scholar]
- Askari, H.; Zahiri, S.H. Data Classification Using Fuzzy-GSA. In Proceedings of the International Conference on Computer and Knowledge Engineering, Mashhad, Iran, 13–14 October 2011; pp. 6–11. [Google Scholar]
- Zahiri, S.H. Fuzzy gravitational search algorithm an approach for data mining. Iran. J. Fuzzy Syst. 2012, 9, 21–37. [Google Scholar]
- Sombra, A.; Valdez, F.; Melin, P.; Castillo, O. A new gravitational search algorithm using fuzzy logic to parameter adaptation. In Proceedings of the IEEE Congress on Evolutionary Computation, Cancun, Mexico, 20–23 June 2013; pp. 1068–1074. [Google Scholar]
- Khabisi, F.S.; Rashedi, E. Fuzzy gravitational search algorithm. In Proceedings of the International E-Conference on Computer and Knowledge Engineering, Mashhad, Iran, 18–19 October 2012; pp. 156–160. [Google Scholar]
- Proakis, J.G.; Manolakis, D.G. Digital Signal Processing; Prentice-Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Karaboga, N.; Cetinkaya, B. Design of minimum phase digital IIR filters by using genetic algorithm. In Proceedings of the 2004 NORSIG 6th Nordic IEEE 6th Nordic Signal Processing Symposium, Espoo, Finland, 9–11 June 2004; pp. 29–32. [Google Scholar]
- Luitel, B.; Venayagamoorthy, G.K. Particle swarm optimization with quantum infusion for the design of digital filters. In Proceedings of the IEEE Swarm Intelligence Symposium, St. Louis, MO, USA, 21–23 September 2008; pp. 1–8. [Google Scholar]
- Luitel, B.; Venayagamoorthy, G.K. Differential evolution particle swarm optimization for digital filter design. In Proceedings of the IEEE Congress on Evolutionary Computation, Hong Kong, China, 1–6 June 2008; pp. 3954–3961. [Google Scholar]
- Dumitrescu, B.; Niemisto, R. Multistage IIR filter design using convex stability domains defined by positive realness. IEEE Trans. Signal Process. 2004, 52, 962–974. [Google Scholar] [CrossRef]
- Tseng, C.; Lee, S. Minimax design of stable IIR digital filter with prescribed magnitude and phase responses. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2002, 49, 547–551. [Google Scholar] [CrossRef]
- Jiang, A.; Kwan, H.K. IIR digital filter design with new stability constraint based on argument principle. IEEE Trans. Circuits Syst. 2009, 56, 583–593. [Google Scholar] [CrossRef]
- Azizipanah-Abarghooee, R.; Terzija, V.; Golestaneh, F. Multiobjective Dynamic Optimal Power Flow Considering Fuzzy-Based Smart Utilization of Mobile Electric Vehicles. IEEE Trans. Ind. Inform. 2016, 12, 503–514. [Google Scholar] [CrossRef]
- Mamdani, E.H. Application of fuzzy logic to approximate reasoning using linguistic synthesis. IEEE Trans. Comput. 1977, 26, 1182–1191. [Google Scholar] [CrossRef]
- Precup, R.-E.; David, R.-C.; Petriu, E.M.; Radac, M.-B.; Preitl, S.; Fodor, J. Evolutionary optimization-based tuning of low-cost fuzzy controllers for servo systems. Knowl. Based Syst. 2013, 38, 74–84. [Google Scholar] [CrossRef]
- Pelusi, D.; Mascella, R.; Tallini, L.; Nayak, J.; Naik, B.; Abraham, A. Neural Network and Fuzzy System for the tuning of Gravitational Search Algorithm parameters. Exp. Syst. Appl. 2018. [Google Scholar] [CrossRef]
Figure 1.
Membership functions of the fuzzy input N.
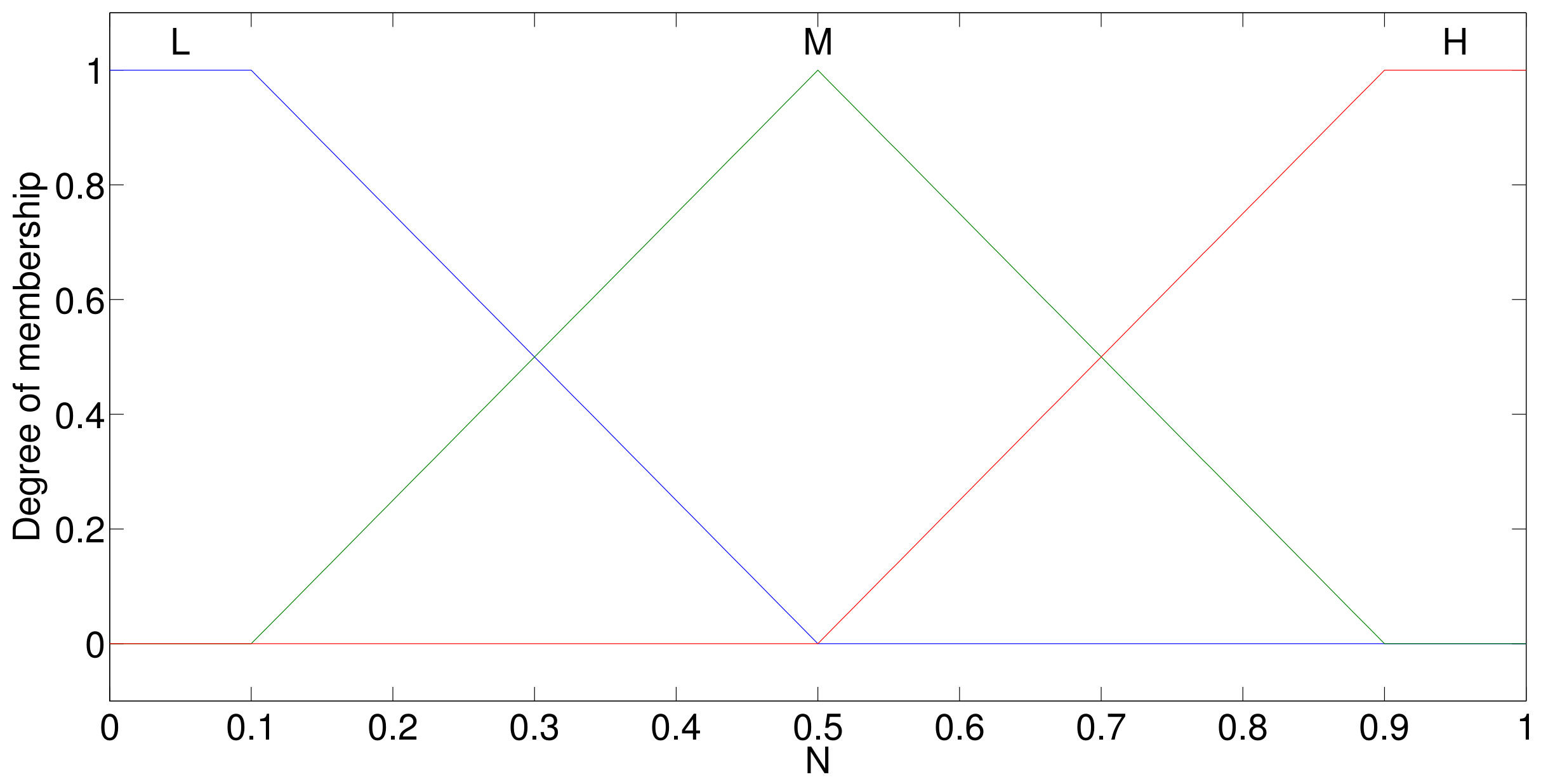
Figure 2.
Membership functions of the fuzzy input .

Figure 3.
Membership functions of the fuzzy output .
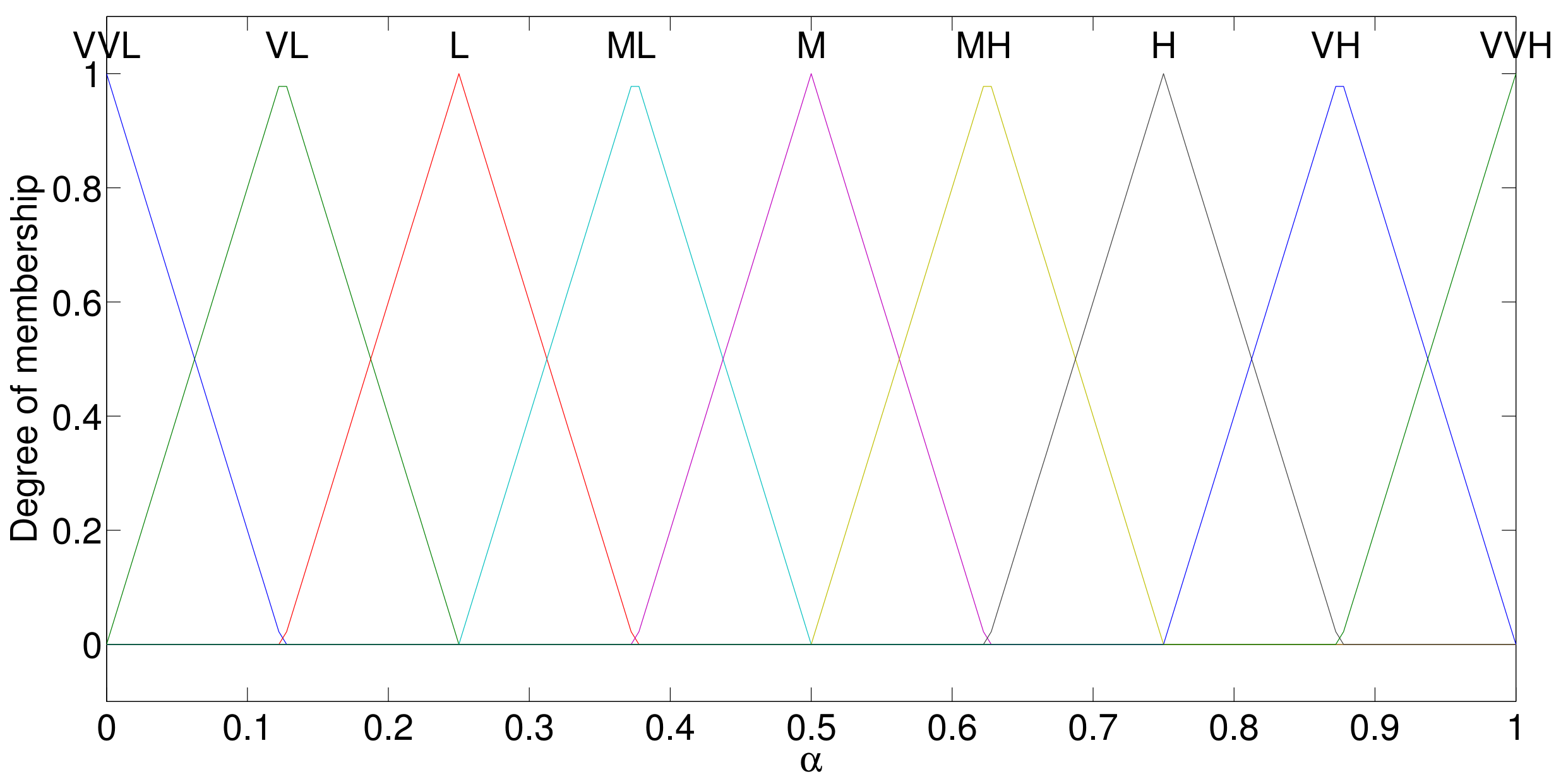
Figure 4.
Architecture of Fuzzy Inference System (FIS) to adjust .

Figure 5.
Architecture of Fuzzy Inference System to adjust .
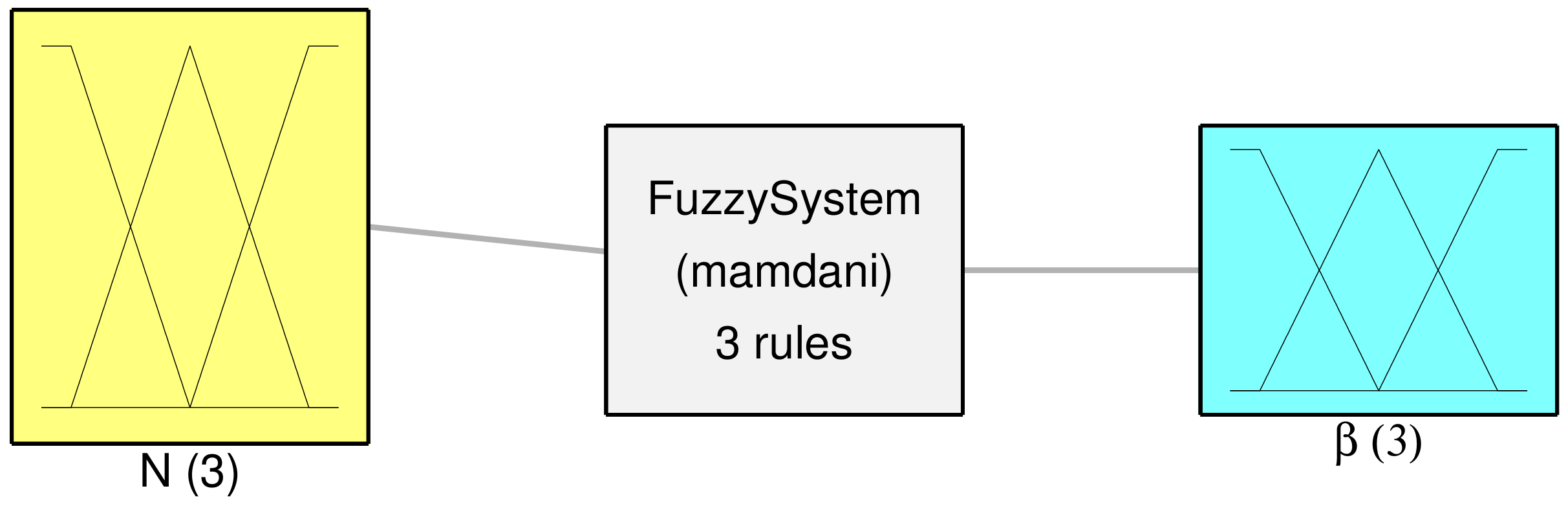
Figure 6.
Membership functions of the fuzzy output .
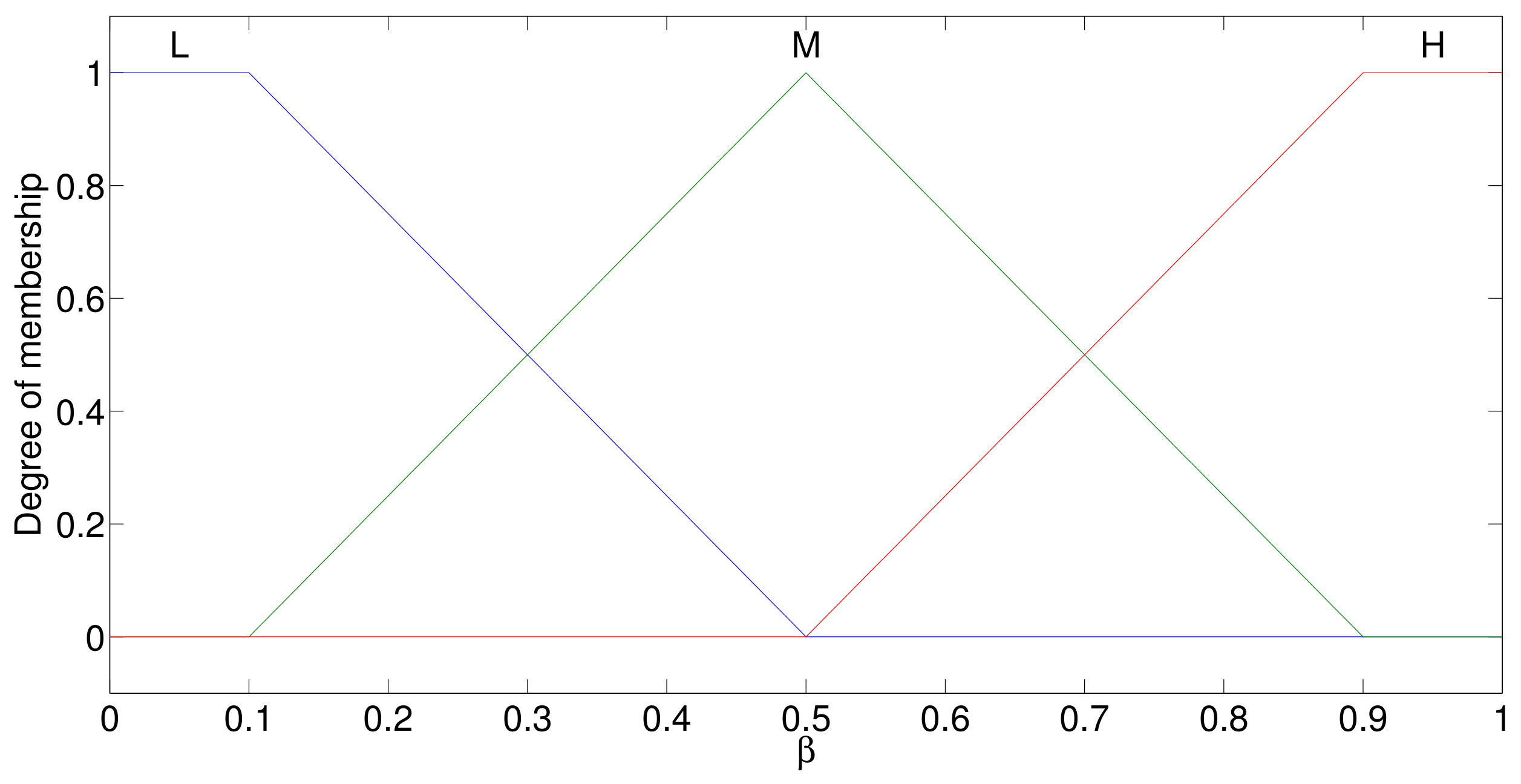
Figure 7.
Magnitude response over normalized frequency for 8th order IIR Low Pass filter using Differential Evolution, Gravitational Search Algorithm and Fuzzy Gravitational Search Algorithm.
Figure 7.
Magnitude response over normalized frequency for 8th order IIR Low Pass filter using Differential Evolution, Gravitational Search Algorithm and Fuzzy Gravitational Search Algorithm.
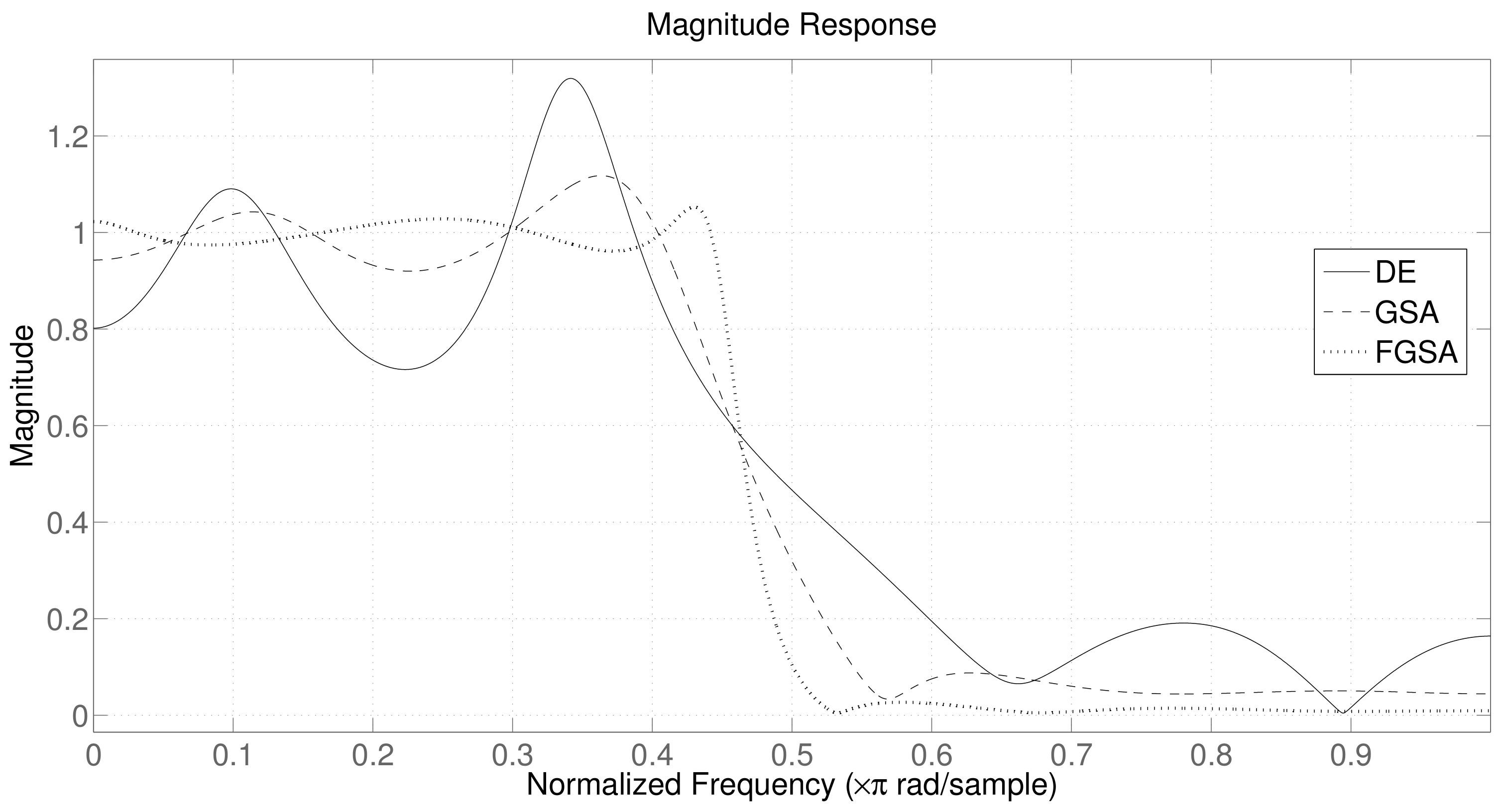
Figure 8.
Magnitude response over normalized frequency for 8th order IIR High Pass filter using DE, GSA and FGSA.
Figure 8.
Magnitude response over normalized frequency for 8th order IIR High Pass filter using DE, GSA and FGSA.
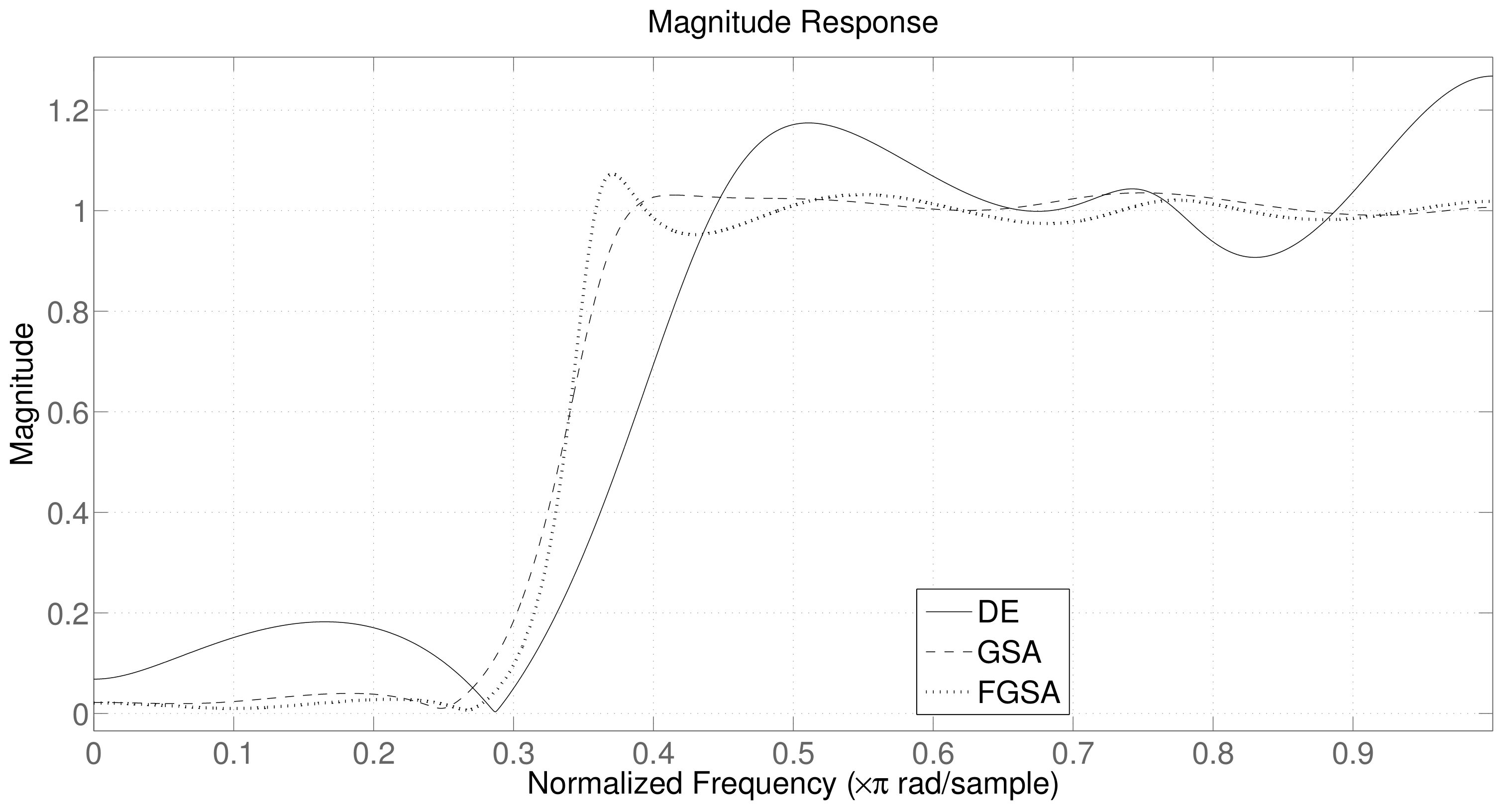
Figure 9.
Magnitude response over normalized frequency for 8th order IIR Band Pass filter using DE, GSA and FGSA
Figure 9.
Magnitude response over normalized frequency for 8th order IIR Band Pass filter using DE, GSA and FGSA
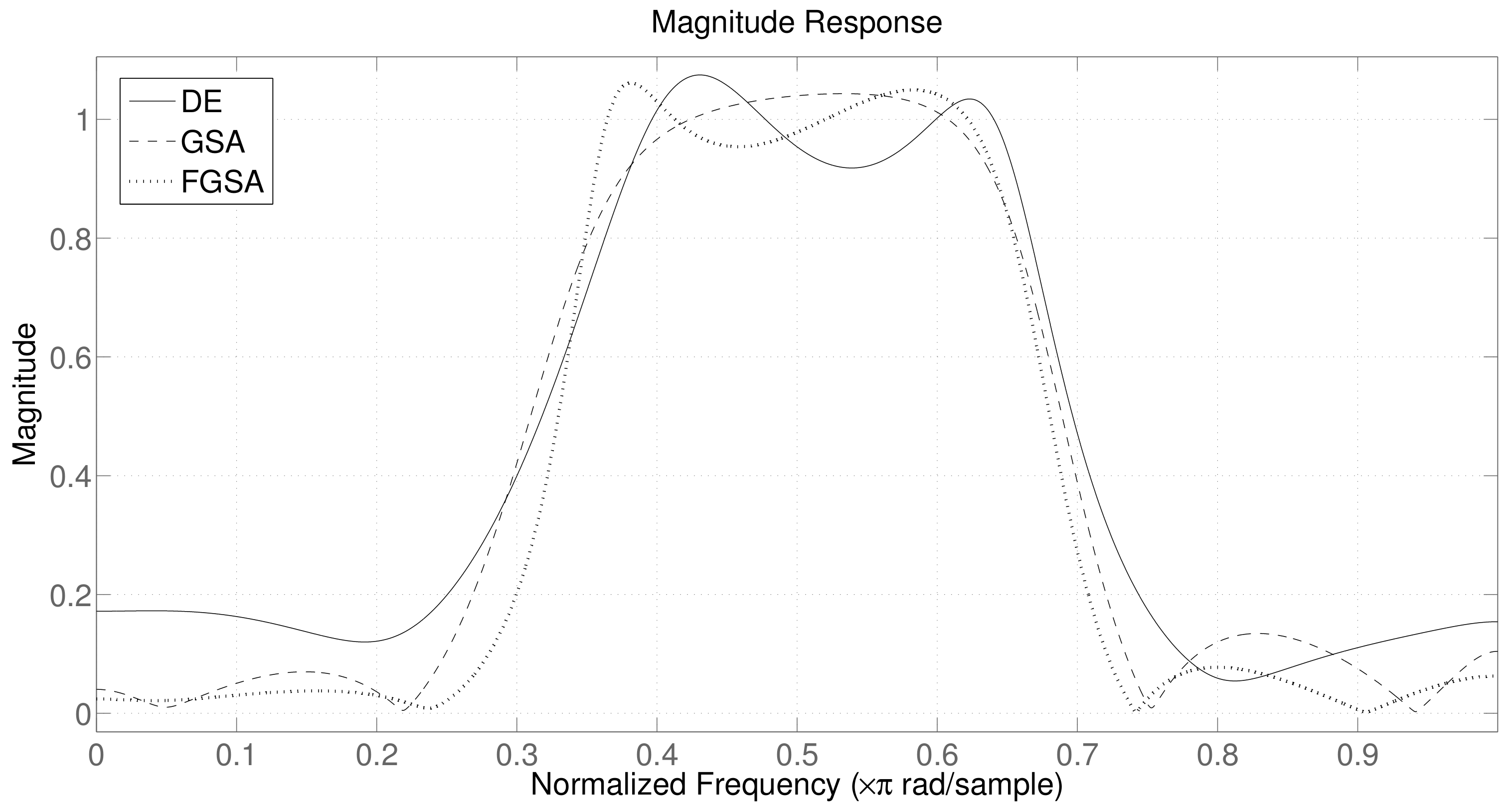
Figure 10.
Magnitude response over normalized frequency for 8th order IIR Stop Band filter using DE, GSA and FGSA.
Figure 10.
Magnitude response over normalized frequency for 8th order IIR Stop Band filter using DE, GSA and FGSA.

Figure 11.
Error fitness function for LP IIR filter.
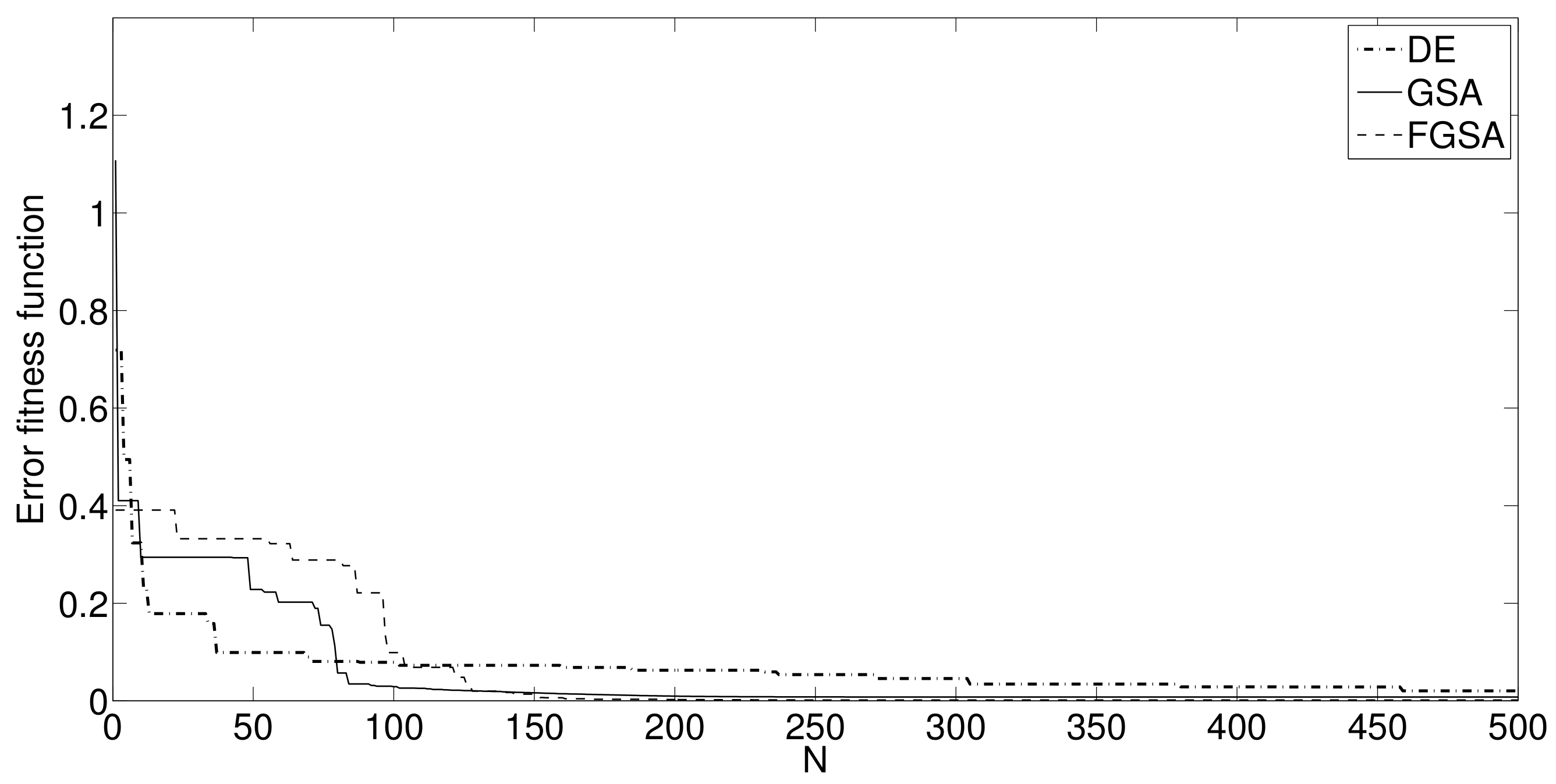
Figure 12.
Pole-zero plot of LP IIR filter.
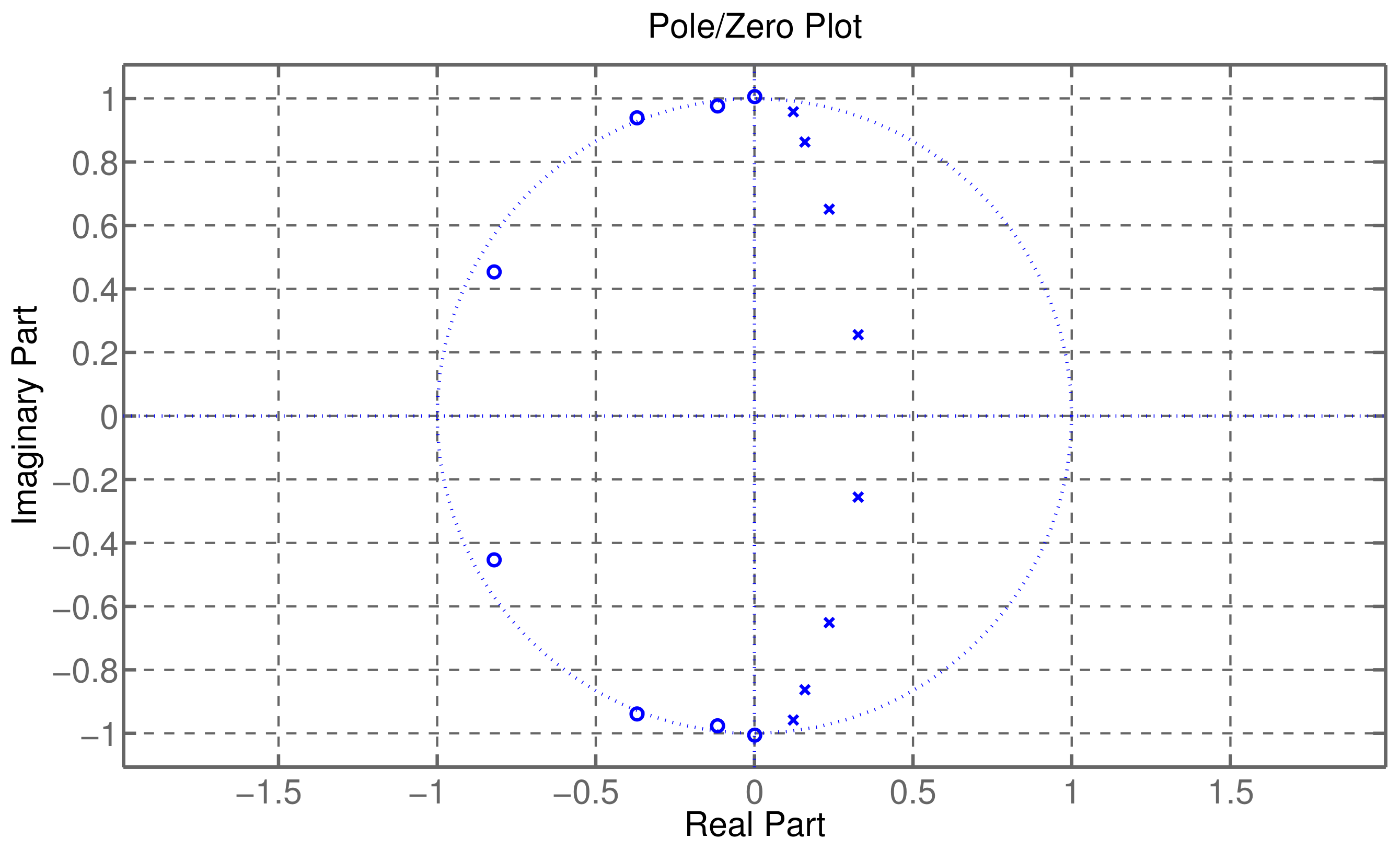
Figure 13.
Pole-zero plot of HP IIR filter.
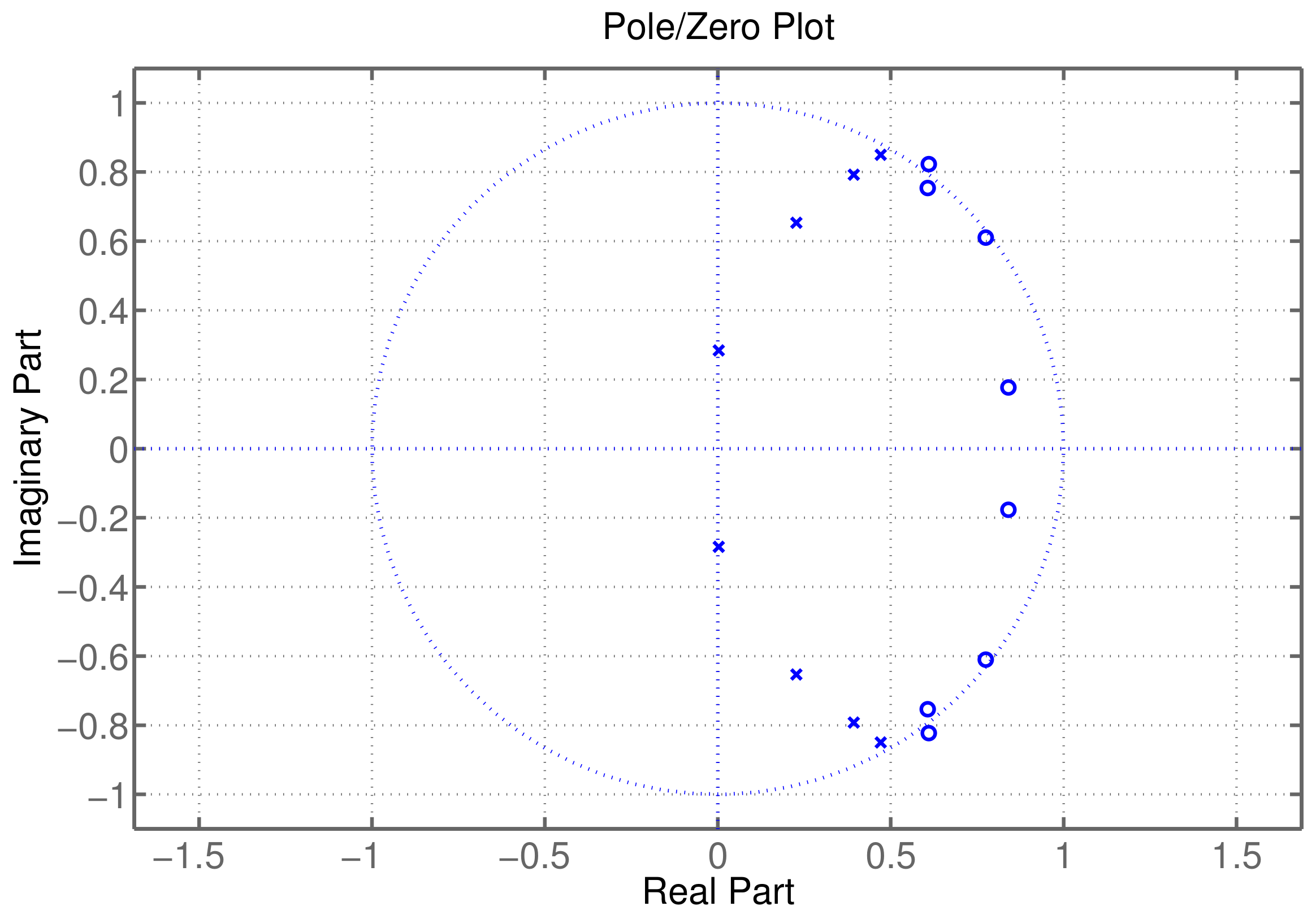
Figure 14.
Pole-zero plot of BP IIR filter.
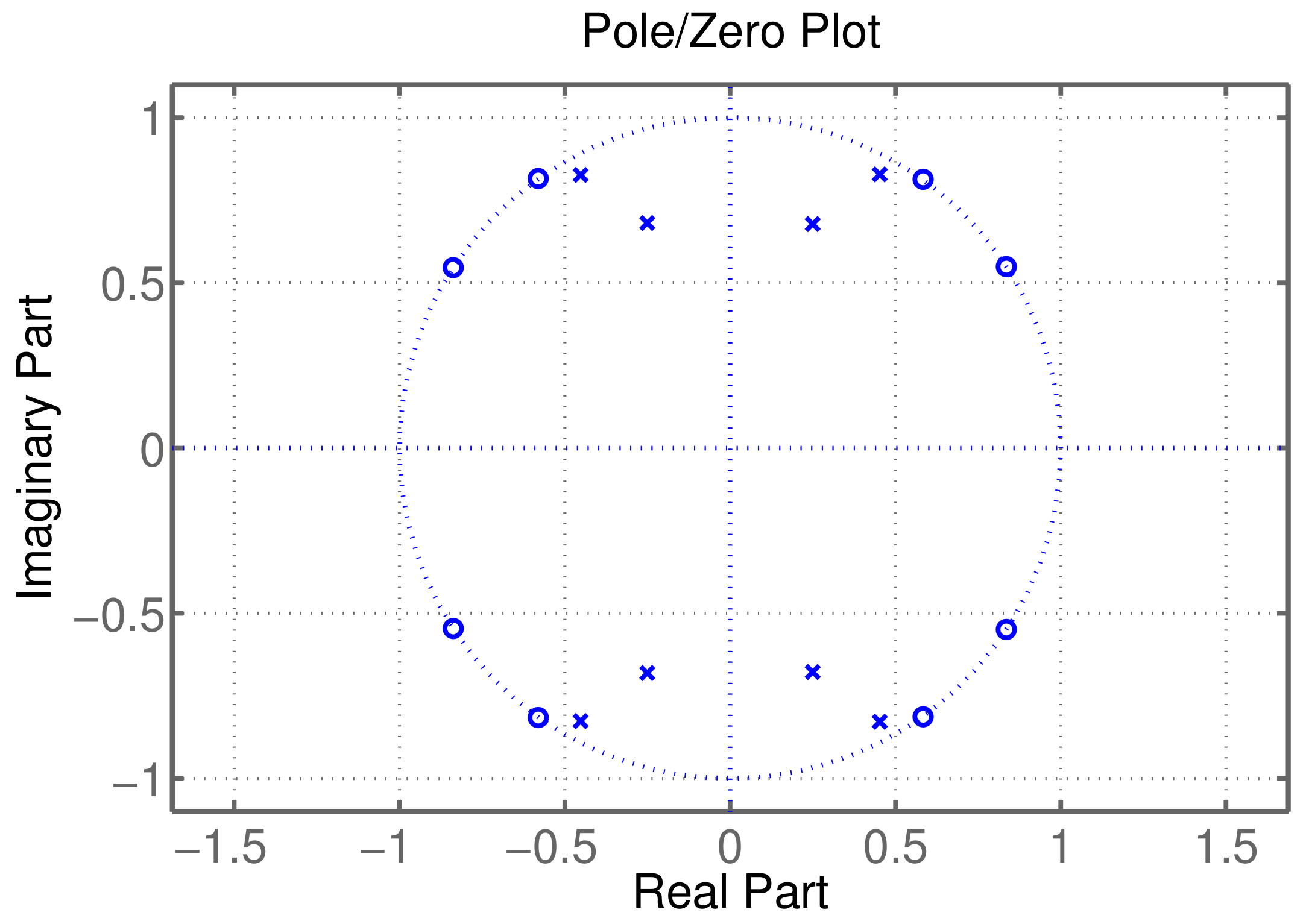
Figure 15.
Pole-zero plot of SB IIR filter.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Fuzzy rules for FIS(Fuzzy Inference System)-.
| N | ||
|---|---|---|
| L | L | L |
| L | M | VL |
| L | H | VVL |
| M | L | MH |
| M | M | M |
| M | H | ML |
| H | L | VVH |
| H | M | VH |
| H | H | H |
Table 2.
Fuzzy rules for FIS-.
| N | |
|---|---|
| L | H |
| M | M |
| H | L |
Table 3.
Design specifications of Low Pass (LP), High Pass (HP), Band Pass (BP) and Stop Band (SB) IIR filters.
Table 3.
Design specifications of Low Pass (LP), High Pass (HP), Band Pass (BP) and Stop Band (SB) IIR filters.
| Filter | w | ||||
|---|---|---|---|---|---|
| LP | 0.01 | 0.001 | 0.45 | 0.50 | - |
| HP | 0.01 | 0.001 | 0.35 | 0.30 | - |
| BP | 0.01 | 0.001 | 0.35 and 0.65 | 0.3 and 0.7 | 0.3 |
| SB | 0.01 | 0.001 | 0.25 and 0.55 | 0.3 and 0.7 | 0.4 |
Table 4.
Pass band ripple, stop band ripple and transition band of LP filters.
| Algorithm | PB-Ripple | SB-Ripple | tb |
|---|---|---|---|
| Differential Evolution (DE) | 0.209371 | 0.174627 | 0.430534 |
| 0.092159 | 0.100366 | 0.188224 | |
| Gravitational Search Algorithm (GSA) | 0.067816 | 0.066199 | 0.120964 |
| 0.016867 | 0.016857 | 0.029634 | |
| Fuzzy Gravitational Search Algorithm (FGSA) | 0.065990 | 0.061591 | 0.101172 |
| 0.022298 | 0.017547 | 0.027451 |
Table 5.
Pass band ripple, stop band ripple and transition band of HP filters.
| Algorithm | PB-Ripple | SB-Ripple | tb |
|---|---|---|---|
| Differential Evolution | 0.301758 | 0.136288 | 0.401888 |
| 0.154653 | 0.087169 | 0.155471 | |
| Gravitational Search Algorithm | 0.047248 | 0.057344 | 0.195117 |
| 0.016758 | 0.010286 | 0.098803 | |
| Fuzzy Gravitational Search Algorithm | 0.067245 | 0.058384 | 0.217318 |
| 0.030699 | 0.011865 | 0.073569 |
Table 6.
Pass band ripple, stop band ripple and transition band of BP filters.
| Algorithm | PB-Ripple | SB-Ripple | tb |
|---|---|---|---|
| Differential Evolution | 0.158257 | 0.463677 | 0.014583 |
| 0.096243 | 0.489097 | 0.413012 | |
| Gravitational Search Algorithm | 0.067377 | 0.080152 | 0.127604 |
| 0.024833 | 0.015516 | 0.041768 | |
| Fuzzy Gravitational Search Algorithm | 0.070821 | 0.076286 | 0.131966 |
| 0.017908 | 0.017812 | 0.061376 |
Table 7.
Pass band ripple, stop band ripple and transition band of SB filters.
| Algorithm | PB-Ripple | SB-Ripple | tb |
|---|---|---|---|
| Differential Evolution | 0.254731 | 0.077870 | 0.248177 |
| 0.127932 | 0.041679 | 0.136460 | |
| Gravitational Search Algorithm | 0.078905 | 0.074704 | 0.117773 |
| 0.022983 | 0.014319 | 0.028508 | |
| Fuzzy Gravitational Search Algorithm | 0.066908 | 0.083628 | 0.111458 |
| 0.023753 | 0.026077 | 0.034889 |
Table 8.
Convergence profile results.
| Algorithm | ||||
|---|---|---|---|---|
| Differential Evolution | 0.016140 | 0.017622 | 0.021384 | 0.029527 |
| 0.004195 | 0.005027 | 0.003965 | 0.004395 | |
| Gravitational Search Algorithm | 0.006185 | 0.004209 | 0.011853 | 0.010370 |
| 0.004130 | 0.003159 | 0.006739 | 0.004559 | |
| Fuzzy Gravitational Search Algorithm | 0.004364 | 0.006941 | 0.010368 | 0.011207 |
| 0.004154 | 0.005924 | 0.006368 | 0.008748 |
Table 9.
Convergence rates of DE, GSA and FGSA for LP, HP, BP and SB IIR filters.
| Algorithm | ||||
|---|---|---|---|---|
| Differential Evolution | 0.6900 | 0.6460 | 0.9900 | 0.8660 |
| Gravitational Search Algorithm | 0.4840 | 0.5640 | 0.5200 | 0.6360 |
| Fuzzy Gravitational Search Algorithm | 0.4560 | 0.5080 | 0.5580 | 0.6440 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Pelusi, D.; Mascella, R.; Tallini, L. A Fuzzy Gravitational Search Algorithm to Design Optimal IIR Filters. Energies 2018, 11, 736. https://doi.org/10.3390/en11040736
AMA Style
Pelusi D, Mascella R, Tallini L. A Fuzzy Gravitational Search Algorithm to Design Optimal IIR Filters. Energies. 2018; 11(4):736. https://doi.org/10.3390/en11040736
Chicago/Turabian StylePelusi, Danilo, Raffaele Mascella, and Luca Tallini. 2018. "A Fuzzy Gravitational Search Algorithm to Design Optimal IIR Filters" Energies 11, no. 4: 736. https://doi.org/10.3390/en11040736
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.