Optimal Capacity Estimation Method of the Energy Storage Mounted on a Wireless Railway Train for Energy-Sustainable Transportation


Abstract
:1. Introduction
2. Basic Formula for Railway Train Performance Analysis
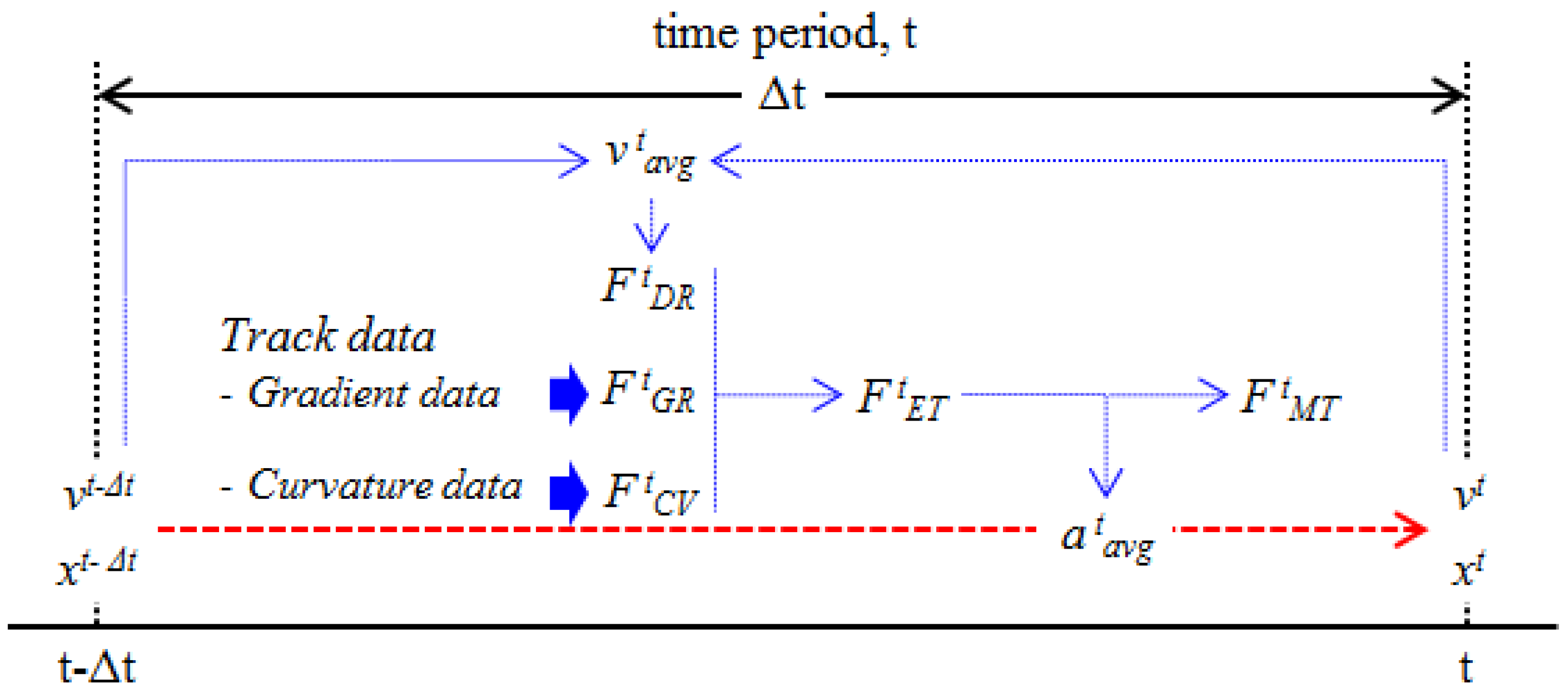
2.1. Kinetic Analysis Equations
2.2. Electrical Power Analysis Equations
3. Optimal Design of ESS Specifications for WRT
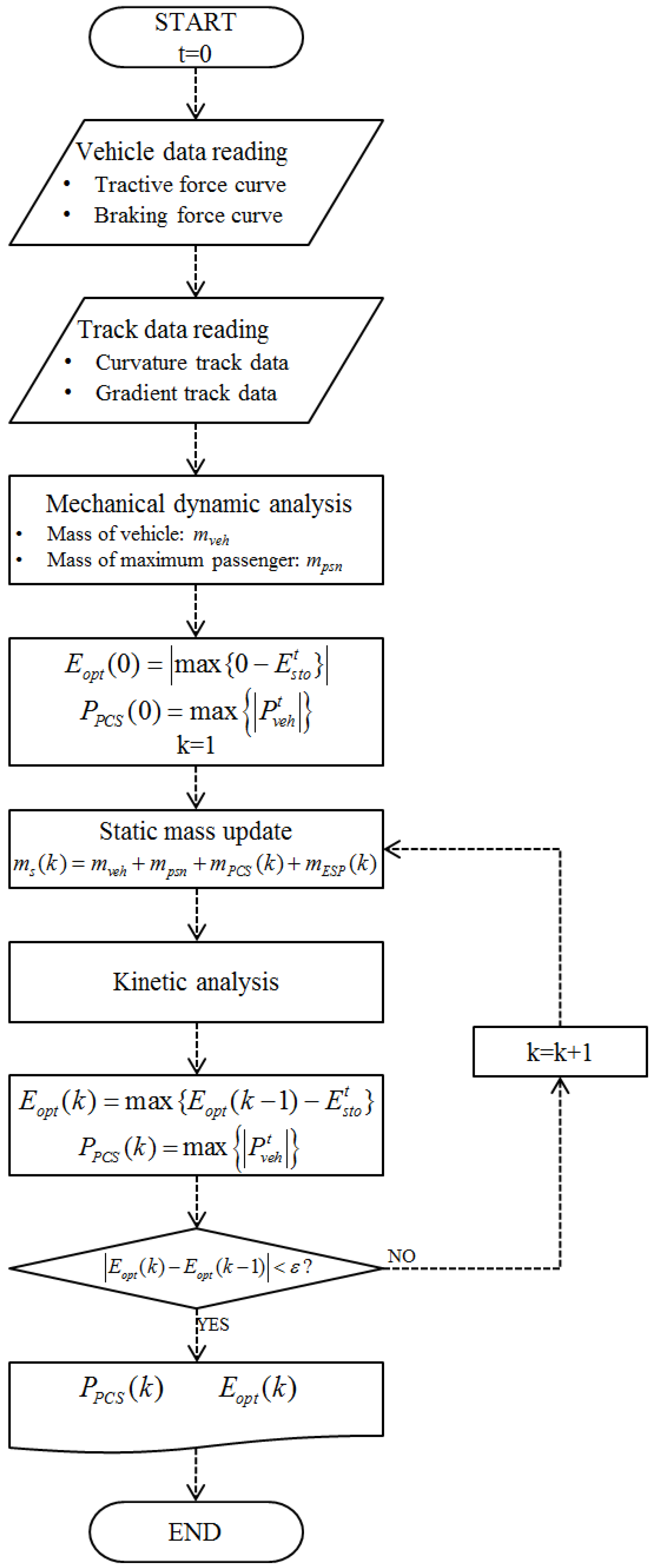
3.1. Optimal Power and Storage Capacity Estimation
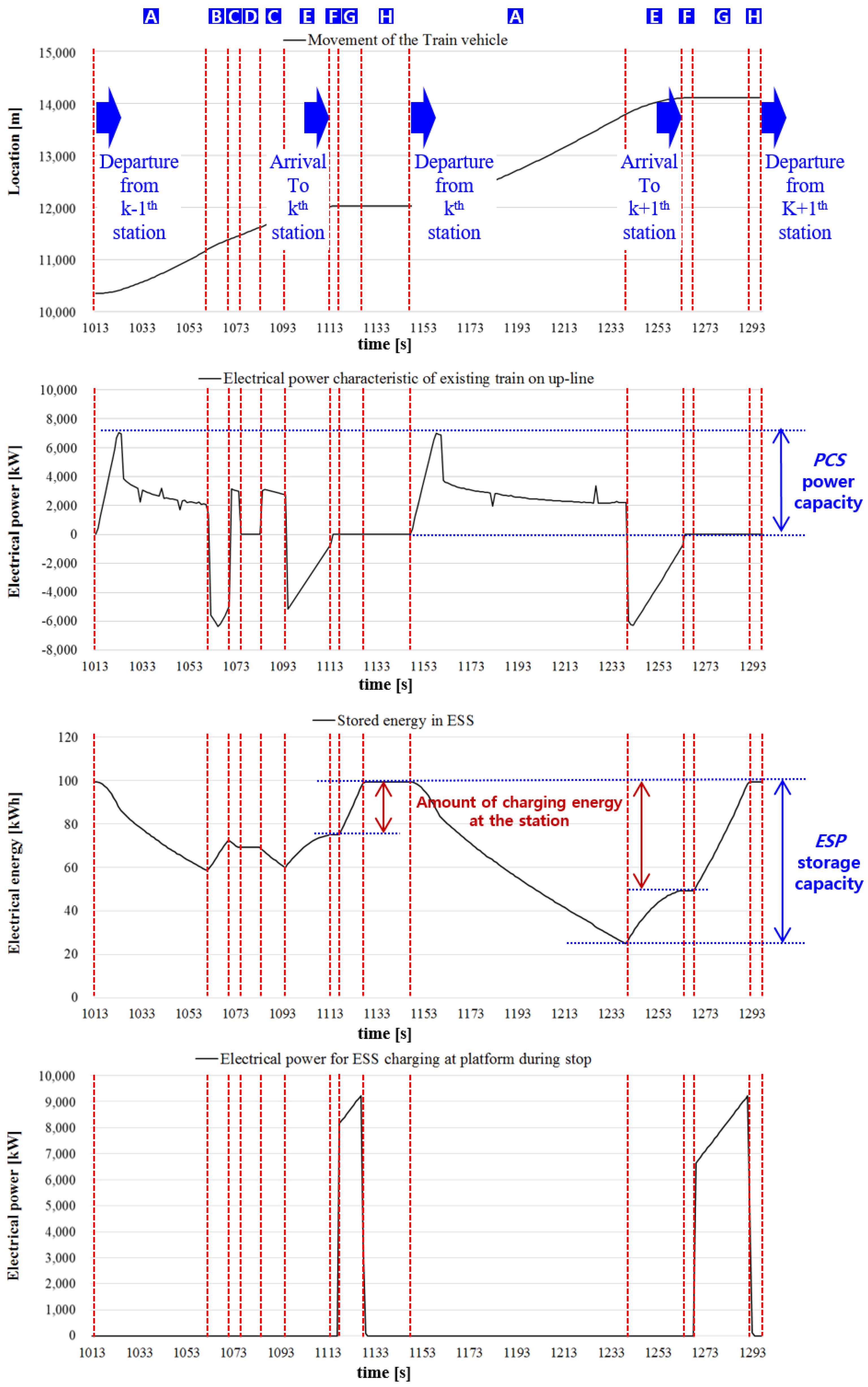
3.2. Storage Charging Characteristic at Platform during Stop
3.3. Modified Electrical Load Characteristic
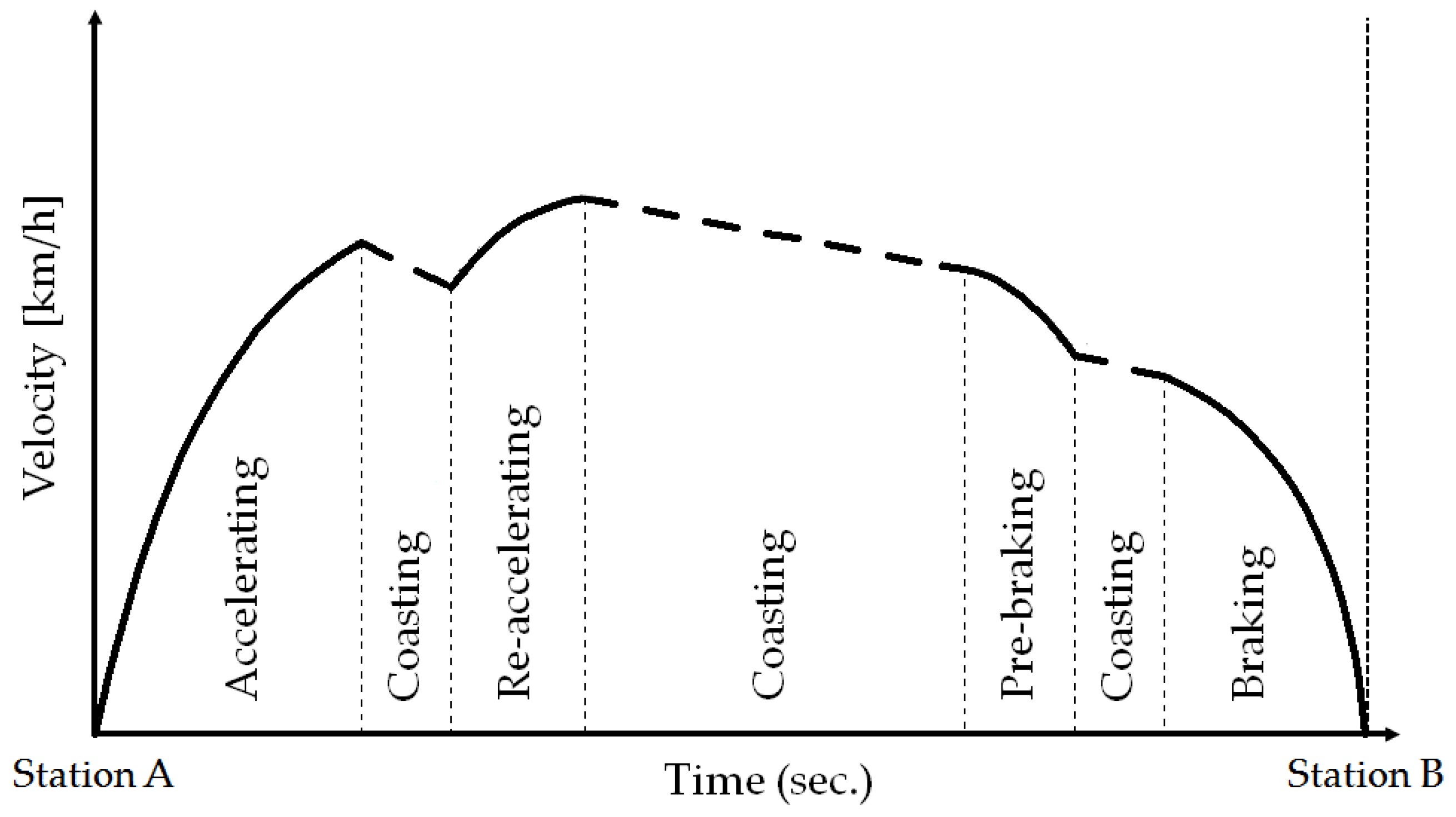
- State A
- Departure and initial accelerating: At the start of ‘State A’, the railway train departs to the next station. During this state, the ESS provides energy for accelerating. At this time, the WRT is electrically isolated from the feeding system and the electrical load for the feeding system is zero.
- State B
- Artificial braking by topographical track condition: Due to the curvature or gradient track condition, artificial braking may occur during driving. It can be seen that the regenerative energy generated at this time is charged by the storage and the stored energy increases.
- State C
- Re-acceleration: After artificial braking, there is a re-acceleration operation to increase the train velocity to within the normal driving velocity range.
- State D
- Coasting: This state is for the inertia operation. Generally, natural deceleration due to driving resistance occurs, but velocity may increase on some negative gradient track.
- State E
- Braking for arrival: A large amount of regenerative energy is usually generated, and the storage has the largest charge amount. At the end of ‘State E’, the WRT arrives at the station and starts to charge.
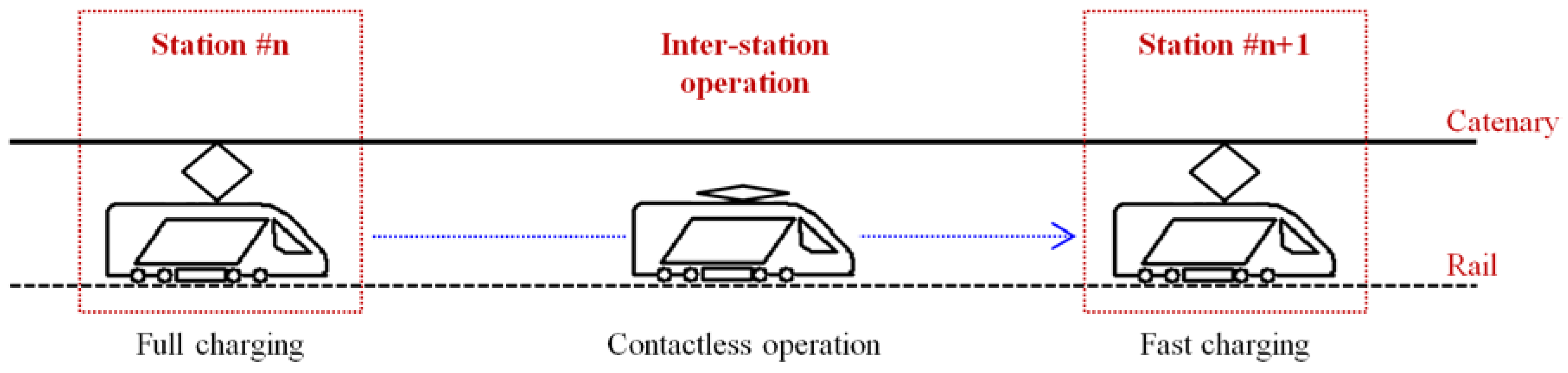
- State F
- Pantograph lifting-up: The pantograph is lifted up for storage charging. This takes around 2 s. At the end of ‘State F’, the WRT is electrically connected to the feeding system.
- State G
- Storage charging with constant current mode: The charging controller charges the storage with the constant charging current up to the full-charged state. During ‘State G’, the feeding system supplies electrical power to the WRT through the pantograph connected to the catenary. Charging operation lasts for up to 25 s.
- State H
- Pantograph lifting-down: After full charging at the end of ‘State G’, the pantograph takes several seconds to come down. At the end of ‘State H’, the WRT is electrically separated and departs to the next station.
4. Case Studies
4.1. System Data
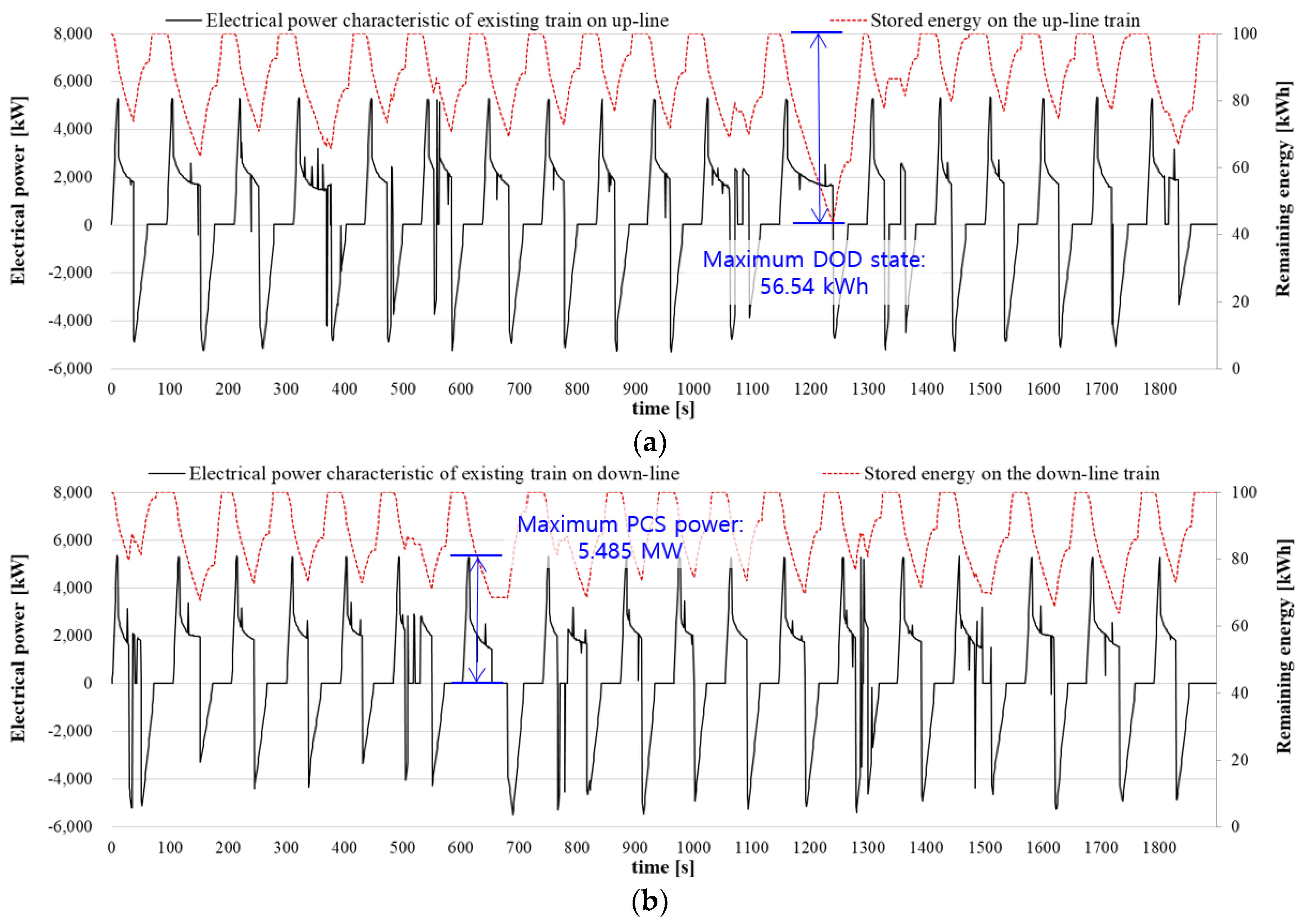
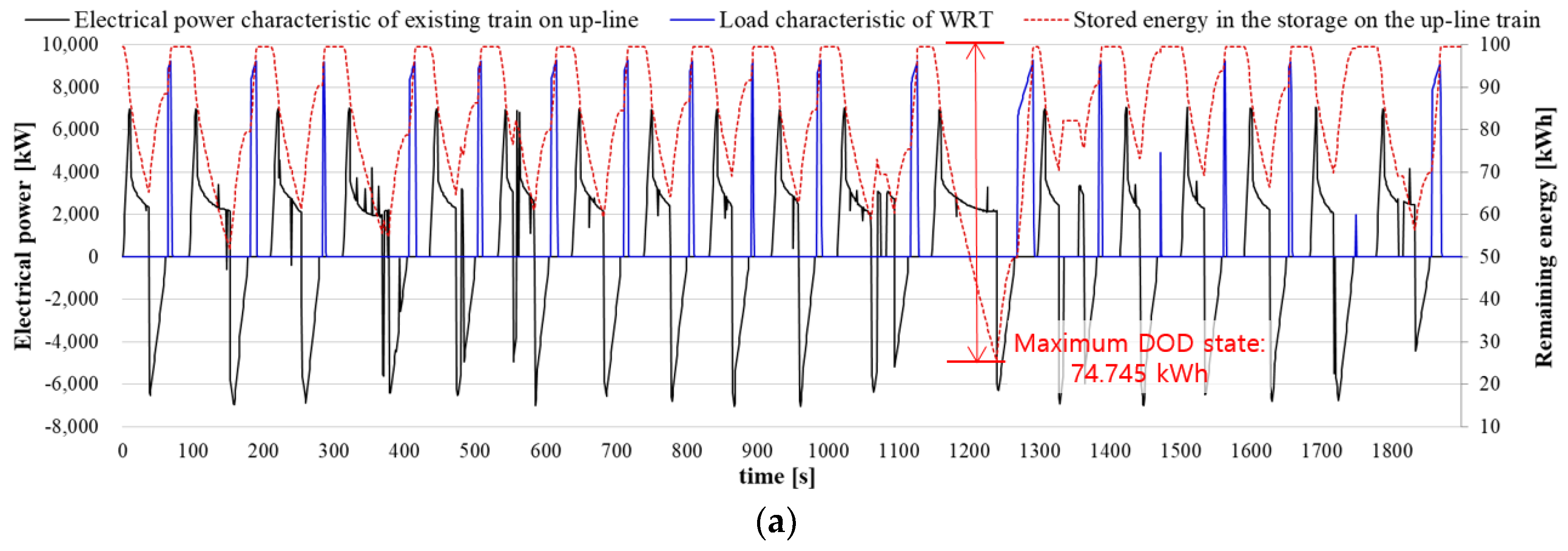
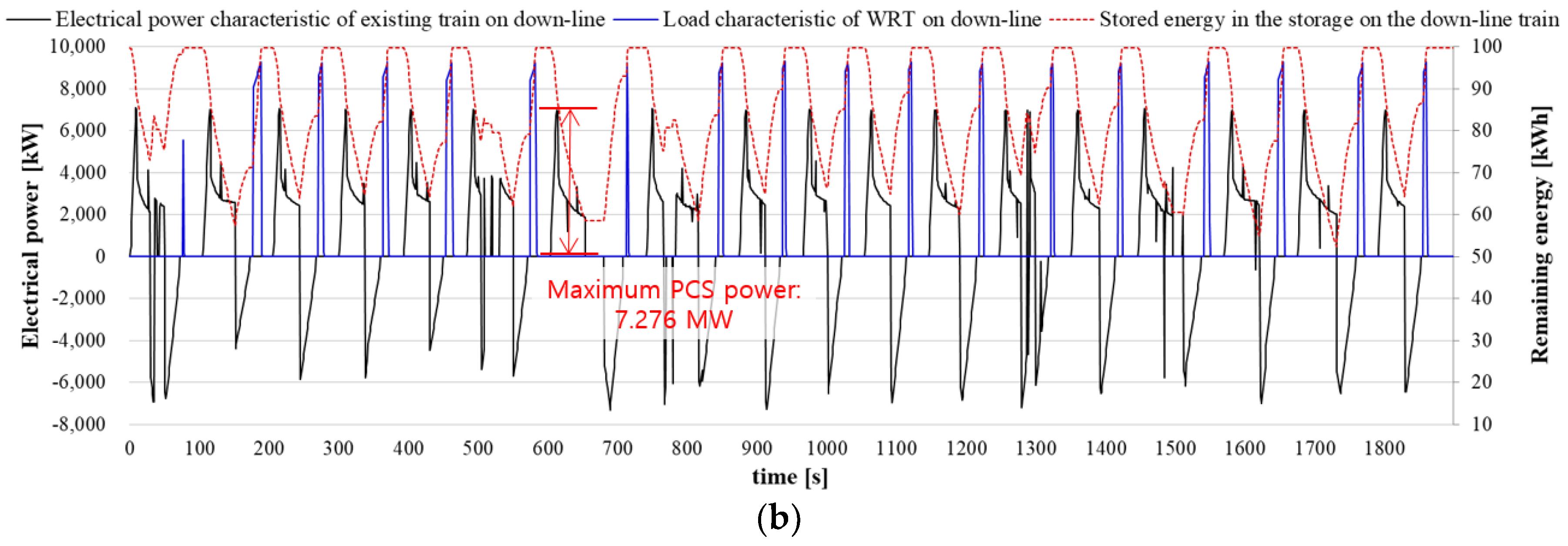
4.2. Optimal Power and Storage Capacity of the Storage on the WRT
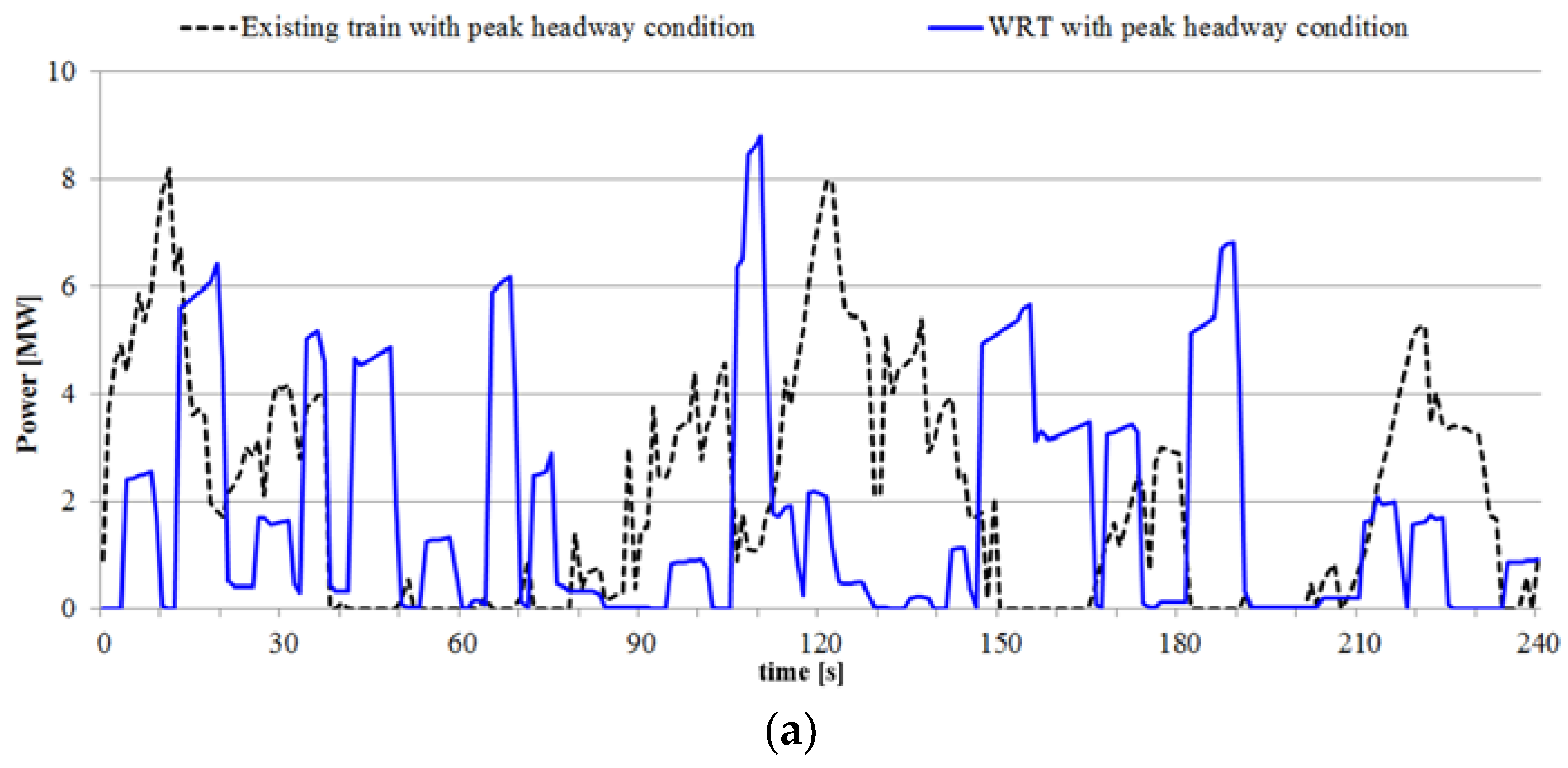
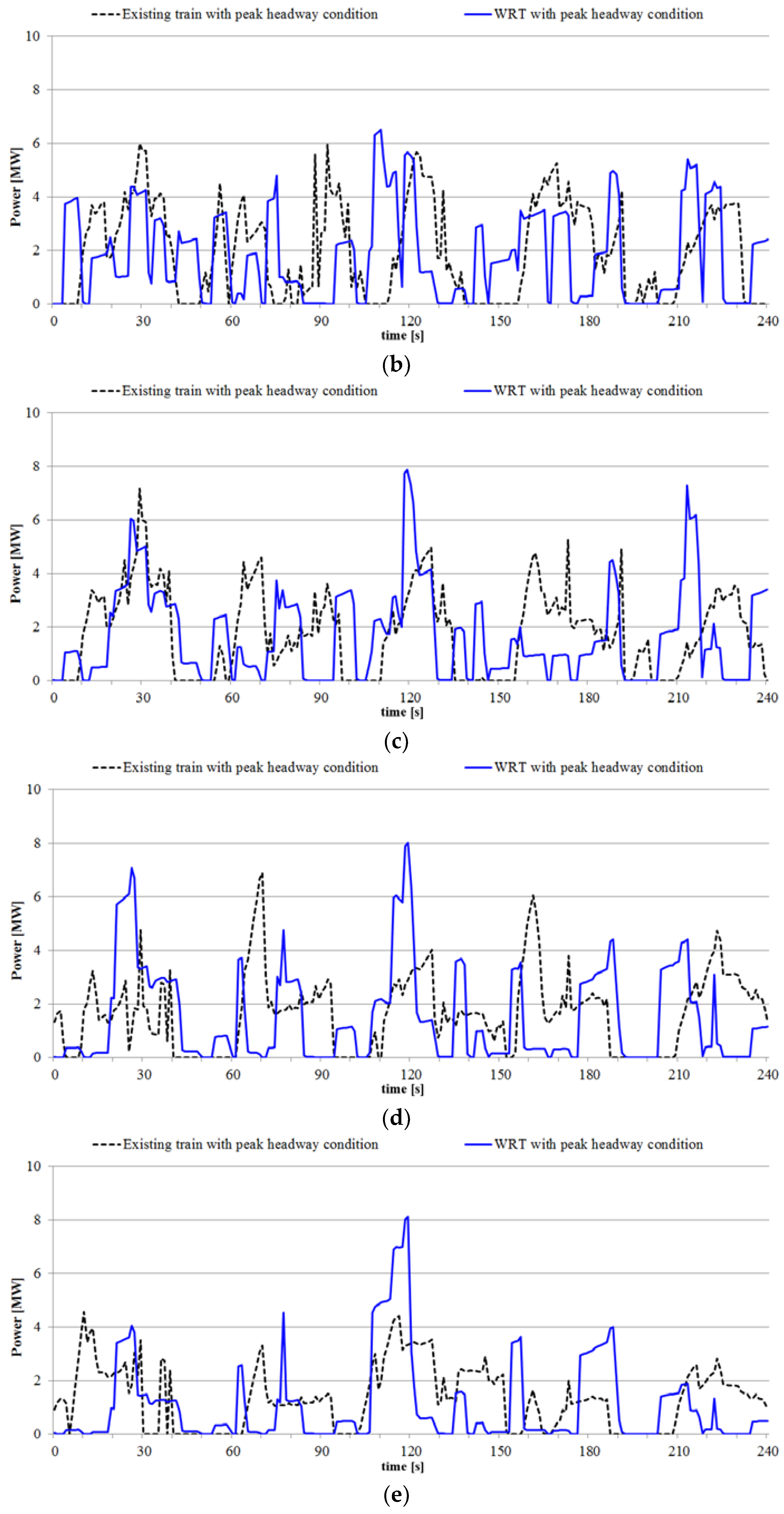
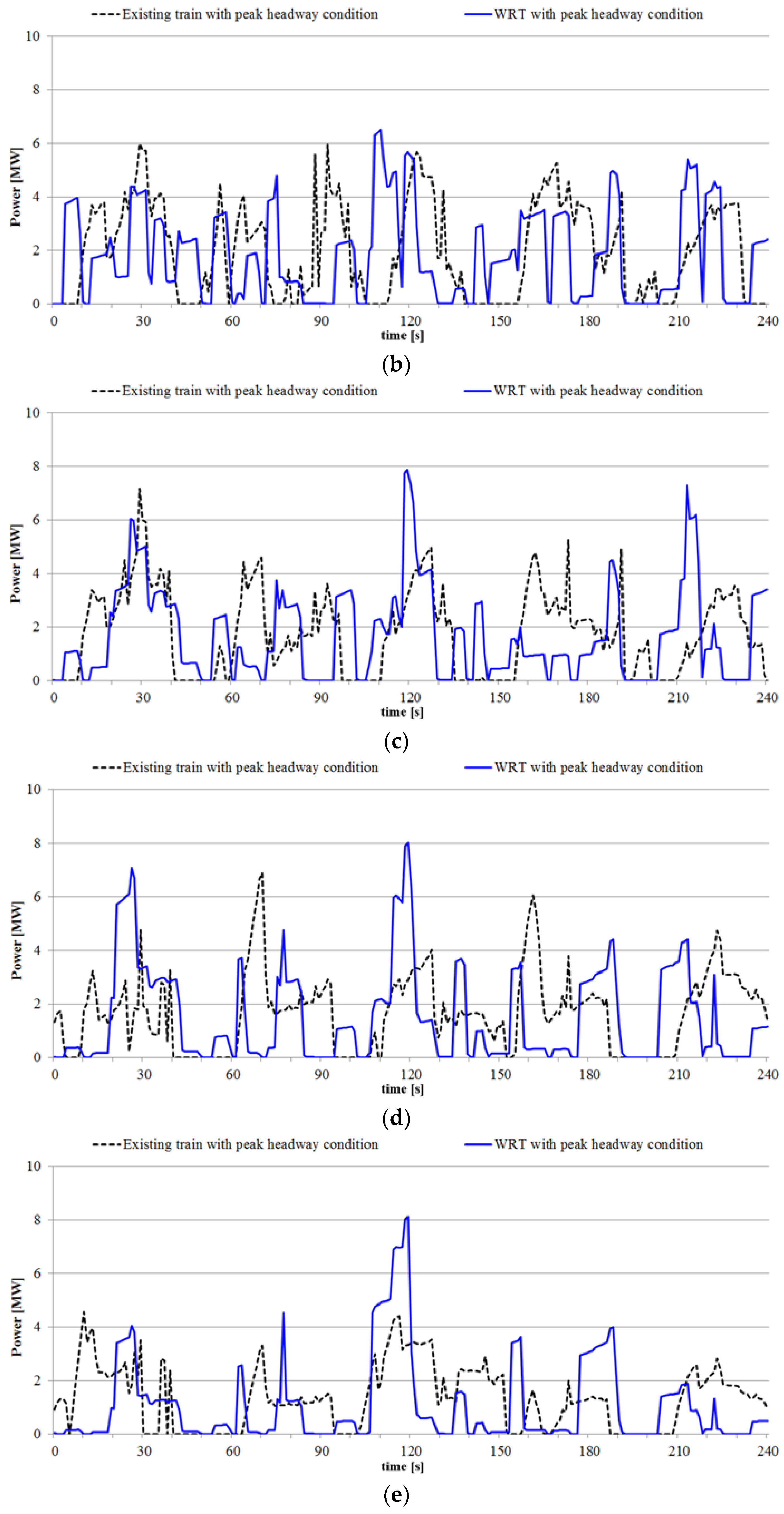
4.3. Peak Headway Operating Condition
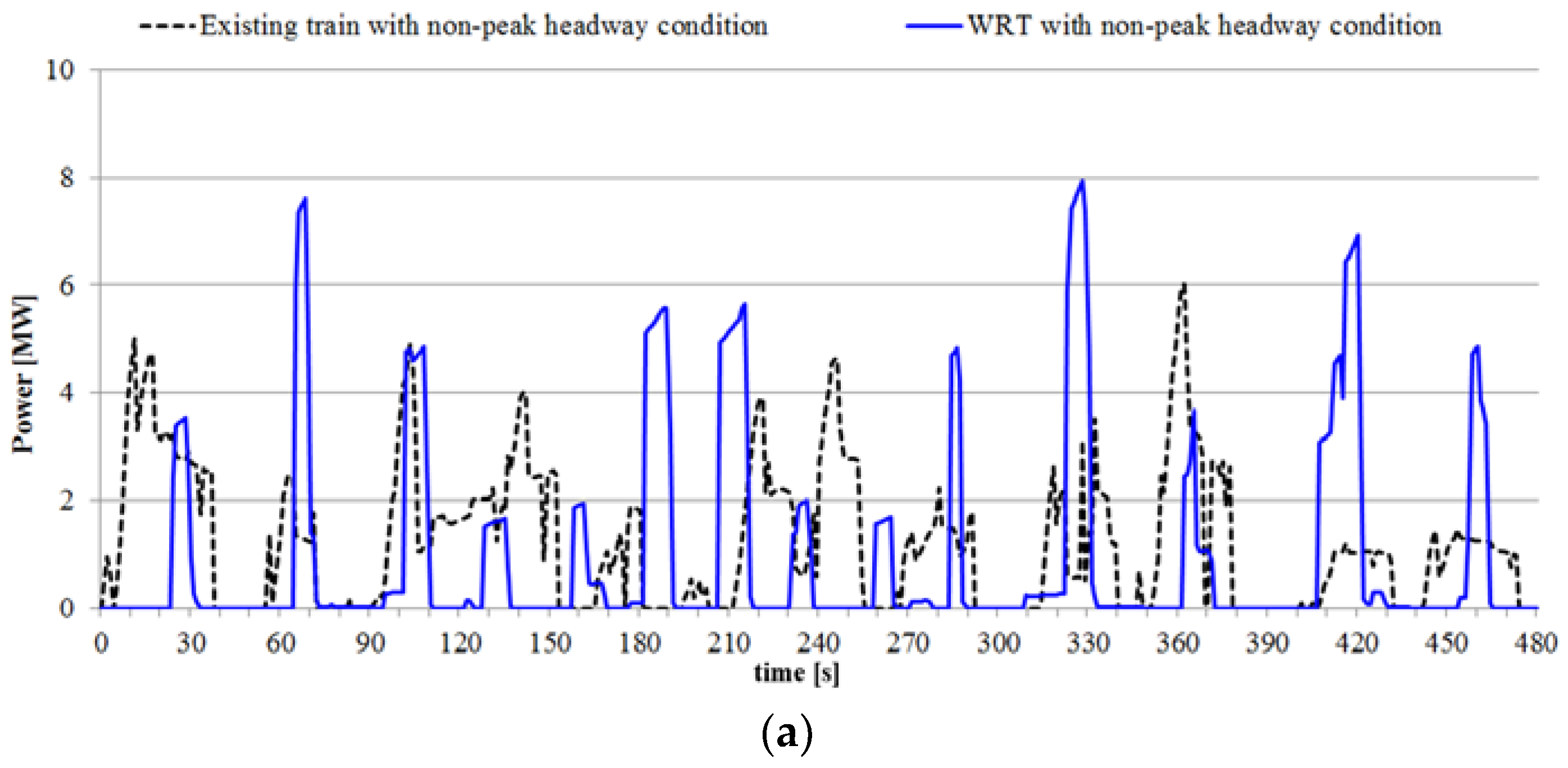
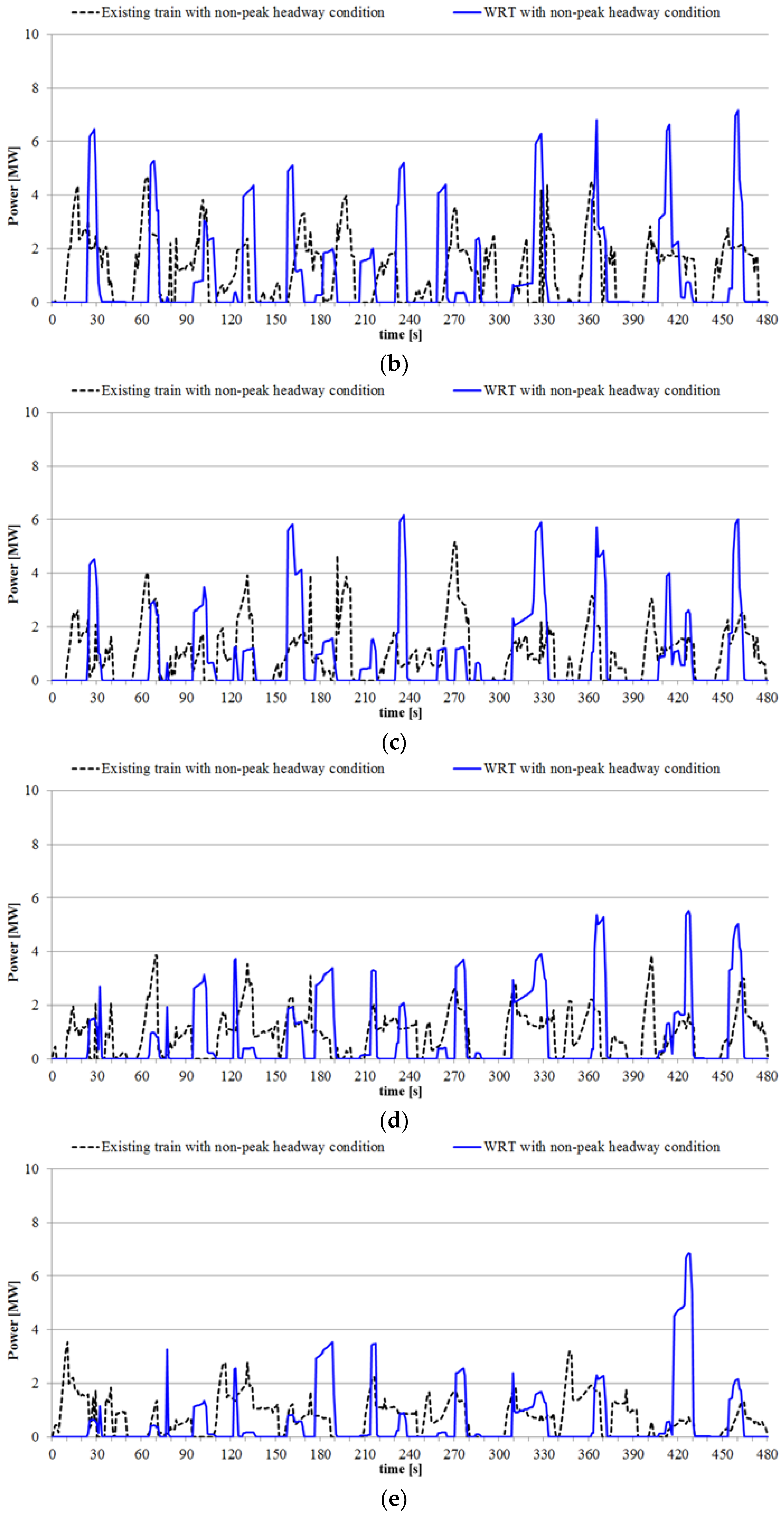
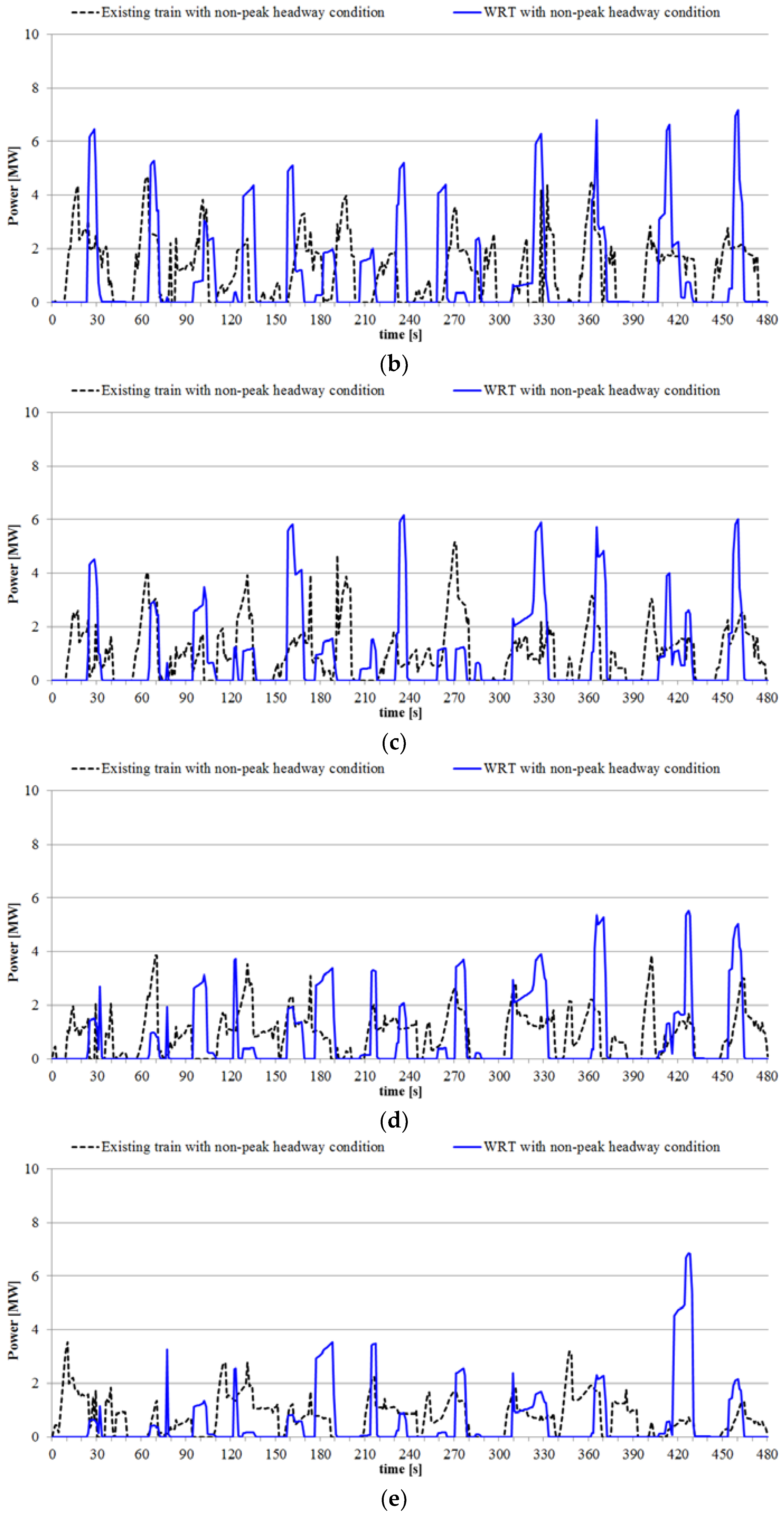
4.4. Non-Peak Headway Operating Condition
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| From (m) | To (m) | Cur. Radius (m) | Speed Limit (km/h) | From (m) | To (m) | Cur. Radius (m) | Speed Limit (km/h) | From (m) | To (m) | Cur. Radius (m) | Speed Limit (km/h) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1249 | 1270 | 60,000 | 100 | 5745 | 6042 | 250 | 65 | 11,800 | 11,828 | 10,000 | 100 |
| 1299 | 1360 | 5497 | 100 | 6263 | 6327 | 542 | 50 | 12,204 | 12,228 | 3000 | 100 |
| 1394 | 1428 | 4502 | 100 | 6513 | 6636 | 1000 | 100 | 12,264 | 12,288 | 3000 | 100 |
| 1449 | 1470 | 5497 | 100 | 6880 | 6900 | 20,000 | 100 | 12,644 | 12,810 | 1202 | 100 |
| 1877 | 1921 | 3002 | 100 | 7064 | 7090 | 12,000 | 100 | 13,217 | 13,304 | 2000 | 100 |
| 2042 | 2171 | 2997 | 100 | 8322 | 8342 | 22,000 | 100 | 13,342 | 13,429 | 2000 | 100 |
| 2265 | 2357 | 2702 | 100 | 8722 | 8850 | 670 | 90 | 13,686 | 14,021 | 800 | 100 |
| 2814 | 2970 | 3397 | 100 | 8930 | 8952 | 50,000 | 100 | 14,669 | 15,002 | 248 | 55 |
| 3068 | 3251 | 1212 | 100 | 9222 | 9243 | 40,000 | 100 | 15,831 | 16,260 | 602 | 90 |
| 3325 | 3345 | 18,000 | 100 | 9373 | 9393 | 46,000 | 100 | 16,568 | 16,690 | 2002 | 100 |
| 3375 | 3395 | 18,000 | 100 | 9472 | 9509 | 50,000 | 100 | 16,961 | 17,704 | 997 | 100 |
| 3623 | 3733 | 1199 | 100 | 10,408 | 10,736 | 802 | 100 | 17,900 | 18,237 | 1002 | 100 |
| 4220 | 4318 | 3000 | 100 | 10,938 | 10,958 | 999 | 100 | 18,624 | 18,668 | 1198 | 100 |
| 4515 | 4945 | 602 | 90 | 11,088 | 11,111 | 999 | 100 | 19,166 | 19,322 | 362 | 75 |
| 5254 | 5317 | 1200 | 100 | 11,378 | 11,633 | 298 | 65 |
Appendix B
| From (m) | To (m) | Gradient [‰] | Speed Limit (km/h) | From (m) | To (m) | Gradient [‰] | Speed Limit (km/h) | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Up | Down | Up | Down | Up | Down | Up | Down | ||||
| 485 | 860 | −3 | 3 | 100 | 100 | 8797 | 9039 | 3 | −3 | 100 | 100 |
| 860 | 1280 | 3 | −3 | 100 | 100 | 9039 | 9096 | −12 | 12 | 105 | 100 |
| 1280 | 1410 | 3 | −3 | 100 | 100 | 9096 | 9357 | −19 | 19 | 105 | 100 |
| 1410 | 1530 | 3 | −3 | 100 | 100 | 9357 | 9534 | 3 | −3 | 100 | 100 |
| 1530 | 1813 | 15 | −15 | 100 | 105 | 9534 | 9663 | 19 | −19 | 100 | 105 |
| 1813 | 2160 | −15 | 15 | 105 | 100 | 9663 | 9800 | 19 | −19 | 100 | 105 |
| 2160 | 2243 | 0 | 0 | 100 | 100 | 9800 | 9934 | 19 | −19 | 100 | 105 |
| 2243 | 2338 | −2 | 2 | 100 | 100 | 9934 | 10,213 | −14 | 14 | 105 | 100 |
| 2338 | 2620 | 14 | −14 | 100 | 105 | 10,213 | 10,350 | −3 | 3 | 100 | 100 |
| 2620 | 2985 | −27 | 27 | 95 | 100 | 10,350 | 10,550 | 3 | −3 | 100 | 100 |
| 2985 | 3315 | −7 | 7 | 105 | 100 | 10,550 | 10,718 | −10 | 10 | 105 | 100 |
| 3315 | 3570 | −29 | 29 | 90 | 100 | 10,718 | 10,884 | −3 | 3 | 100 | 100 |
| 3570 | 3830 | −15 | 15 | 105 | 100 | 10,884 | 11,190 | −10 | 10 | 105 | 100 |
| 3830 | 4090 | −4 | 4 | 100 | 100 | 11,190 | 11,439 | 10 | −10 | 100 | 105 |
| 4090 | 4347 | 17 | −17 | 100 | 105 | 11,439 | 12,026 | 10 | −10 | 100 | 105 |
| 4347 | 4402 | 30 | −30 | 100 | 90 | 12,026 | 12,492 | 22 | −22 | 100 | 100 |
| 4402 | 4654 | 29 | −29 | 100 | 90 | 12,492 | 13,465 | 10 | −10 | 100 | 105 |
| 4654 | 4895 | 5 | −5 | 100 | 100 | 13,465 | 13,785 | 22 | −22 | 100 | 100 |
| 4895 | 5004 | −4 | 4 | 100 | 100 | 13,785 | 14,104 | 3 | −3 | 100 | 100 |
| 5004 | 5163 | −2 | 2 | 100 | 100 | 14,104 | 15,143 | −6 | 6 | 105 | 100 |
| 5163 | 5620 | −3 | 3 | 100 | 100 | 15,143 | 15,302 | 3 | −3 | 100 | 100 |
| 5620 | 5957 | 4 | −4 | 100 | 100 | 15,302 | 15,592 | −28 | 28 | 95 | 100 |
| 5957 | 6296 | 10 | −10 | 100 | 105 | 15,592 | 15,892 | −17 | 17 | 105 | 100 |
| 6296 | 6573 | 14 | −14 | 100 | 105 | 15,892 | 16,063 | 3 | −3 | 100 | 100 |
| 6573 | 6760 | −10 | 10 | 105 | 100 | 16,063 | 16,352 | −16 | 16 | 105 | 100 |
| 6760 | 6915 | 3 | −3 | 100 | 100 | 16,352 | 16,741 | −4 | 4 | 100 | 100 |
| 6915 | 7083 | 10 | −10 | 100 | 105 | 16,741 | 16,882 | −3 | 3 | 100 | 100 |
| 7083 | 7213 | 10 | −10 | 100 | 105 | 16,882 | 17,589 | −8 | 8 | 105 | 100 |
| 7213 | 7353 | −10 | 10 | 105 | 100 | 17,589 | 17,763 | 8 | −8 | 100 | 105 |
| 7353 | 7503 | −7 | 7 | 105 | 100 | 17,763 | 18,399 | −25 | 25 | 95 | 100 |
| 7503 | 7674 | −7 | 7 | 105 | 100 | 18,399 | 18,731 | −3 | 3 | 100 | 100 |
| 7674 | 7973 | 3 | −3 | 100 | 100 | 18,731 | 19,210 | 3 | −3 | 100 | 100 |
| 7973 | 8173 | 16 | −16 | 100 | 105 | 19,210 | 19,501 | 12 | −12 | 100 | 105 |
| 8173 | 8483 | −3 | 3 | 100 | 100 | 19,501 | 19,902 | 32 | −32 | 100 | 90 |
| 8483 | 8797 | −3 | 3 | 100 | 100 | ||||||
References
- Song, Y.; Ouyang, H.; Liu, Z.; Mei, G.; Wang, H.; Lu, X. Active control of contact force for high-speed railway pantograph-catenary based on multi-body pantograph model. Mech. Mach. Theory 2017, 115, 35–59. [Google Scholar] [CrossRef]
- Vo Van, O.; Massat, J.-P.; Balmes, E. Waves, modes and properties with a major impact on dynamic pantograph-catenary interaction. J. Sound Vib. 2017, 402, 51–69. [Google Scholar] [CrossRef]
- Schirrer, A.; Aschauer, G.; Talic, E.; Kozek, M.; Jakubek, S. Catenary emulation for hardware-in-the-loop pantograph testing with a model predictive energy-conserving control algorithm. Mechatronics 2017, 41, 17–28. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Z.; Mu, X.; Huang, K.; Wang, H.; Gao, S. An Extended Habedank’s Equation-Based EMTP Model of Pantograph Arcing Considering Pantograph-Catenary Interactions and Train Speeds. IEEE Trans. Power Deliv. 2016, 31, 1186–1194. [Google Scholar] [CrossRef]
- Kuo, M.-T.; Lo, W.-Y. Magnetic Components Used in the Train Pantograph to Reduce the Arcing Phenomena. IEEE Trans. Ind. Appl. 2014, 50, 2891–2899. [Google Scholar] [CrossRef]
- Gershman, I.S.; Gershman, E.I.; Mironov, A.E.; Fox-Rabinovich, G.S.; Veldhuis, S.C. On Increased Arc Endurance of the Cu-Cr System Materials. Entropy 2017, 19, 386. [Google Scholar] [CrossRef]
- Jung, N.-G.; Lee, H.; Kim, J.-M. A Study on Characteristic of Power Conversion System in Electric Railway Vehicle According to Contact Loss in Feeding System Considering Characteristic of Rigid Bar. Trans. KIEE 2016, 65, 520–525. [Google Scholar] [CrossRef]
- Hwang, K.; Kim, D.; Har, D.; Ahn, S. Pickup Coil Counter for Detecting the Presence of Trains Operated by Wireless Power Transfer. IEEE Sens. J. 2017, 17, 7526–7532. [Google Scholar] [CrossRef]
- Li, S.; Liu, Z.; Zhao, H.; Zhu, L.; Shuai, C.; Chen, Z. Wireless Power Transfer by Electric Field Resonance and Its Application in Dynamic Charging. IEEE Trans. Ind. Electron. 2016, 63, 6602–6612. [Google Scholar] [CrossRef]
- Lee, S.B.; Ahn, S.; Jang, I.G. Simulation-Based Feasibility Study on the Wireless Charging Railway System with a Ferriteless Primary Module. IEEE Trans. Veh. Technol. 2017, 66, 1004–1010. [Google Scholar] [CrossRef]
- Kim, J.H.; Lee, B.S.; Lee, J.H.; Lee, S.H.; Park, C.B.; Jung, S.M.; Lee, S.G.; Yi, K.P.; Baek, J. Development of 1-MW Inductive Power Transfer System for a High-Speed Train. IEEE Trans. Ind. Electron. 2015, 62, 6242–6250. [Google Scholar] [CrossRef]
- Kim, J.H.; Lee, B.S.; Lee, J.H.; Lee, S.H.; Park, C.B.; Jung, S.M.; Lee, S.G.; Yi, K.P.; Baek, J. Conceptual Design and Operating Characteristics of Multi-Resonance Antennas in the Wireless Power Charging System for Superconducting MAGLEV Train. IEEE Trans. Appl. Supercond. 2017, 27, 3601805. [Google Scholar]
- De Boeij, J.; Lomonova, E.; Duarte, J. Contactless Planar Actuator with Manipulator: A Motion System without Cables and Physical Contact between the Mover and the Fixed World. IEEE Trans. Ind. Appl. 2009, 45, 1930–1938. [Google Scholar] [CrossRef]
- Lee, H.S.; Lee, H.M.; Lee, C.M.; Jang, G.S.; Kim, G.D. Energy Storage Application Strategy on DC Electric Railroad System using a Novel Railroad Analysis Algorithm. J. Electr. Eng. Technol. 2010, 5, 228–238. [Google Scholar] [CrossRef]
- Lee, H.; Song, J.; Lee, H.; Lee, C.; Jang, G.; Kim, G. Capacity Optimization of the Supercapacitor Energy Storages on DC Railway System Using a Railway Powerflow Algorithm. Int. J. Innov. Comput. Inf. Control 2011, 7, 2739–2753. [Google Scholar]
- Lee, H.; Jung, S.; Cho, Y.; Yoon, D.; Jang, G. Peak power reduction and energy efficiency improvement with the superconducting flywheel energy storage in electric railway system. Physica C 2013, 494, 246–249. [Google Scholar] [CrossRef]
- Jung, B.; Kim, H.; Kang, H.; Lee, H. Development of a Novel Charging Algorithm for On-board ESS in DC Train through Weight Modification. J. Electr. Eng. Technol. 2014, 9, 1795–1804. [Google Scholar] [CrossRef]
- Iannuzzi, D.; Ciccarelli, F.; Lauria, D. Stationary ultricapacitors storage device for improving energy saving and voltage profile of light transportation networks. Transport. Res. C Emerg. Technol. 2012, 21, 321–337. [Google Scholar] [CrossRef]
- Arboleya, P.; Bidaguren, P.; Armendariz, U. Energy Is On Board: Energy Storage and Other Alternatives in Modern Light Railways. IEEE Electrif. Mag. 2016, 4, 30–41. [Google Scholar] [CrossRef]
- Xiao, Z.; Sun, P.; Wang, Q.; Zhu, Y.; Feng, X. Integrated Optimization of Speed Profiles and Power Split for a Tram with Hybrid Energy Storage Systems on a Signalized Route. Energies 2018, 11, 478. [Google Scholar] [CrossRef]
- Ceraolo, M.; Lutzemberger, G. Stationary and on-board storage systems to enhance energy and cost efficiency of tramways. J. Power Sources 2014, 264, 128–139. [Google Scholar] [CrossRef]










| Type | System Data | Value | |
|---|---|---|---|
| Operational Data | Total travel time | 1854 (s) | |
| Dwell time | 30 (s) | ||
| Headway | Peak | 240 (s) | |
| Non-peak | 480 (s) | ||
| Total route length | 19,902 (m) | ||
| Structural Data | Station (substation) location | Station 1 | 0 (m) |
| Station 2 | 860 (m) | ||
| Station 3 (sub #1) | 2243 (m) | ||
| Station 4 | 3315 (m) | ||
| Station 5 | 5004 (m) | ||
| Station 6 | 5957 (m) | ||
| Station 7 (sub #2) | 6915 (m) | ||
| Station 8 | 7973 (m) | ||
| Station 9 | 8797 (m) | ||
| Station 10 | 9543 (m) | ||
| Station 11 | 10,350 (m) | ||
| Station 12 (sub #3) | 12,026 (m) | ||
| Station 13 | 14,104 (m) | ||
| Station 14 | 15,302 (m) | ||
| Station 15 (sub #4) | 16,063 (m) | ||
| Station 16 | 16,882 (m) | ||
| Station 17 | 17,763 (m) | ||
| Station 18 | 18,731 (m) | ||
| Station 19 (sub #5) | 19,902 (m) | ||
| Electrical Data | Rated voltage | 1500 (V) | |
| No-load voltage | 1650 (V) | ||
| Source impedance | 0.02956 (Ω) | ||
| Feeder impedance | 0.0203 (Ω/km) | ||
| Rail impedance | 0.000464 (Ω/km) | ||
| Iteration | mveh (tonne) | mpsn (tonne) | Paux (MW) | PPCS (MW) | mPCS (tonne) | ESTO (kWh) | mSTO (tonne) |
|---|---|---|---|---|---|---|---|
| Step 0 | 204.7 | 61.4 | 0.02 | - | - | - | - |
| Step 1 | 204.7 | 61.4 | 0.02 | 5.485 | 12.6 | 75.39 | 52.8 |
| Step 2 | 204.7 | 61.4 | 0.02 | 6.837 | 14.7 | 93.73 | 65.6 |
| Step 3 | 204.7 | 61.4 | 0.02 | 7.251 | 16.8 | 97.92 | 68.5 |
| Step 4 | 204.7 | 61.4 | 0.02 | 7.271 | 16.8 | 99.33 | 69.5 |
| Step 5 | 204.7 | 61.4 | 0.02 | 7.275 | 16.8 | 99.60 | 69.7 |
| Step 6 | 204.7 | 61.4 | 0.02 | 7.276 | 16.8 | 99.66 | 69.8 |
| Step 7 | 204.7 | 61.4 | 0.02 | 7.276 | 16.8 | 99.66 | 69.8 |
| Sub. No. | Existing Train | WRT | Ratio of Supplied Energy (%) | ||
|---|---|---|---|---|---|
| Maximum Power (MW) | Total Supplied Energy (kWh) | Maximum Power (MW) | Total Supplied Energy (kWh) | ||
| 1 | 8.17 | 136.80 | 8.78 | 120.83 | 88.32 |
| 2 | 6.00 | 130.95 | 6.52 | 121.31 | 92.65 |
| 3 | 7.17 | 118.66 | 7.87 | 110.35 | 93.00 |
| 4 | 6.90 | 110.79 | 8.02 | 99.08 | 89.43 |
| 5 | 4.56 | 90.14 | 8.13 | 70.43 | 78.13 |
| Total | 587.34 | 522.01 | 88.88 | ||
| Train | Analysis Results | Results | Remarks |
|---|---|---|---|
| Existing Train | Total energy for traction (kWh) | 1031.74 | |
| Total regenerative energy (kWh) | −669.78 | ||
| Total energy for auxiliary loads (kWh) | 21.10 | ||
| System loss (kWh) | 204.28 | Losses, regenerative energy dissipation | |
| Total supplied energy of substation (kWh) | 587.34 | ||
| WRT | Total energy for traction (kWh) | 479.52 | |
| Total regenerative energy (kWh) | - | No regenerative energy into the catenary | |
| Total energy for auxiliary loads (kWh) | 21.10 | ||
| System loss (kWh) | 21.39 | Only system losses | |
| Total supplied energy of substation (kWh) | 522.01 |
| Sub. No. | Existing Train | WRT | Ratio of Supplied Energy (%) | ||
|---|---|---|---|---|---|
| Maximum Power (MW) | Total Supplied Energy (kWh) | Maximum Power (MW) | Total Supplied Energy (kWh) | ||
| 1 | 6.01 | 163.50 | 7.93 | 121.63 | 74.39 |
| 2 | 4.70 | 157.12 | 7.17 | 122.81 | 78.16 |
| 3 | 5.17 | 137.55 | 6.17 | 111.93 | 81.37 |
| 4 | 3.86 | 122.79 | 5.53 | 99.49 | 81.02 |
| 5 | 3.53 | 100.03 | 6.87 | 70.72 | 70.71 |
| Total | 680.98 | 526.57 | 77.33 | ||
| Train | Analysis Results | Results | Remarks |
|---|---|---|---|
| Existing Train | Total energy for traction (kWh) | 1031.74 | |
| Total regenerative energy (kWh) | −669.78 | ||
| Total energy for auxiliary loads (kWh) | 21.10 | ||
| System loss (kWh) | 297.92 | Losses, regenerative energy dissipation | |
| Total supplied energy of substation (kWh) | 680.98 | ||
| WRT | Total energy for traction (kWh) | 479.52 | |
| Total regenerative energy (kWh) | - | No regenerative energy into the catenary | |
| Total energy for auxiliary loads (kWh) | 21.10 | ||
| System loss (kWh) | 25.95 | Only system losses | |
| Total supplied energy of substation (kWh) | 526.57 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.; Kim, J.; Lee, C.; Kim, G.; Lee, H.; Lee, B. Optimal Capacity Estimation Method of the Energy Storage Mounted on a Wireless Railway Train for Energy-Sustainable Transportation. Energies 2018, 11, 986. https://doi.org/10.3390/en11040986
Kim J, Kim J, Lee C, Kim G, Lee H, Lee B. Optimal Capacity Estimation Method of the Energy Storage Mounted on a Wireless Railway Train for Energy-Sustainable Transportation. Energies. 2018; 11(4):986. https://doi.org/10.3390/en11040986
Chicago/Turabian StyleKim, Jaewon, Joorak Kim, Changmu Lee, Gildong Kim, Hansang Lee, and Byongjun Lee. 2018. "Optimal Capacity Estimation Method of the Energy Storage Mounted on a Wireless Railway Train for Energy-Sustainable Transportation" Energies 11, no. 4: 986. https://doi.org/10.3390/en11040986