Hybrid Electric Powertrain with Fuel Cells for a Series Vehicle

 ,
,
Abstract
:1. General Considerations
- -
- -
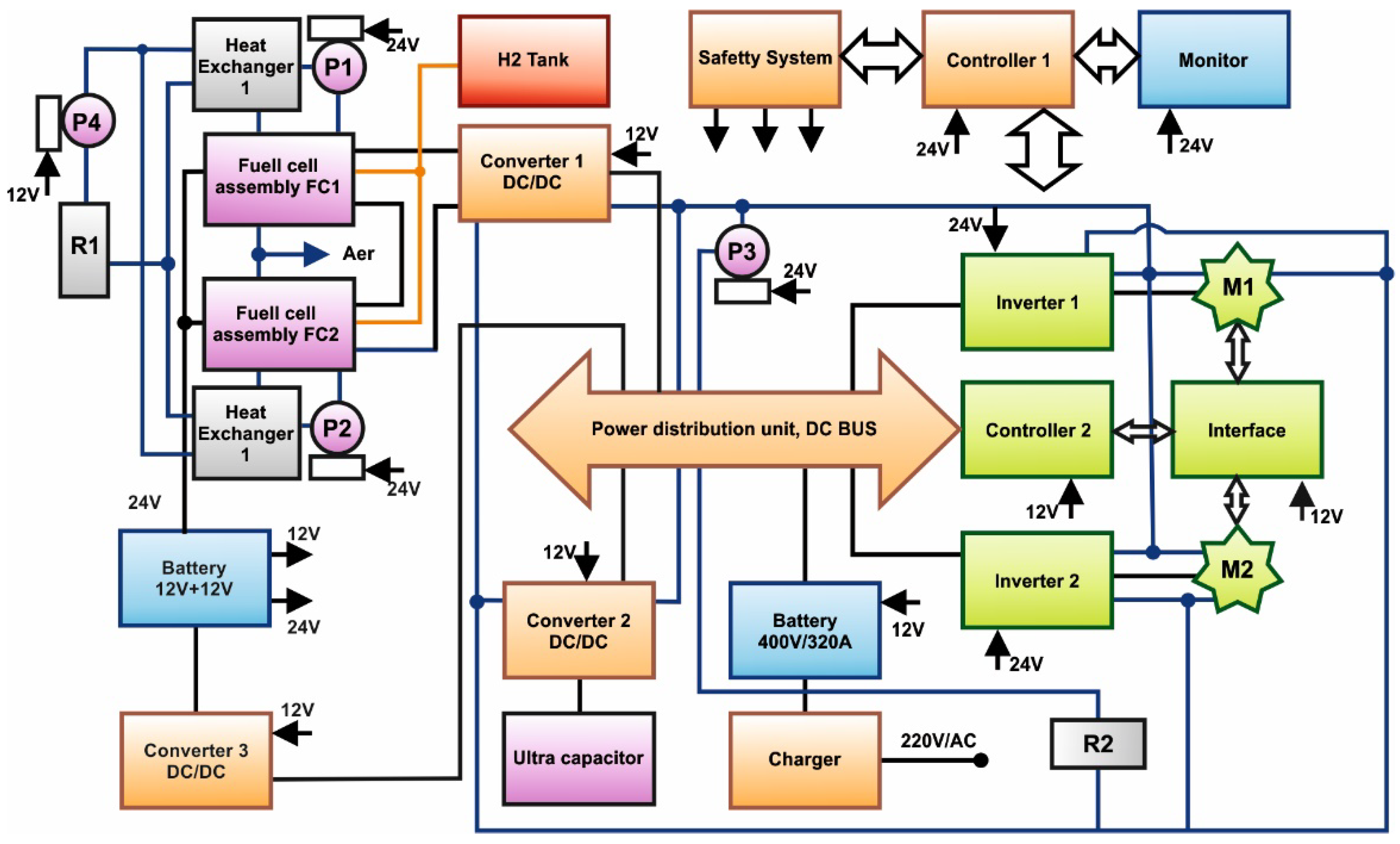
2. Structure and Operating Principles of an Electric Vehicle Powered by a Hybrid Fuel Cell Energy Source
- -
- Minimization of hydrogen consumption [9];
- -
- Protection of the fuel cell from fast transitions of the load;
- -
- Storage of energy in a battery-ultracapacitor assembly; and
- -
- The maintenance of power over the load within the prescribed limits.
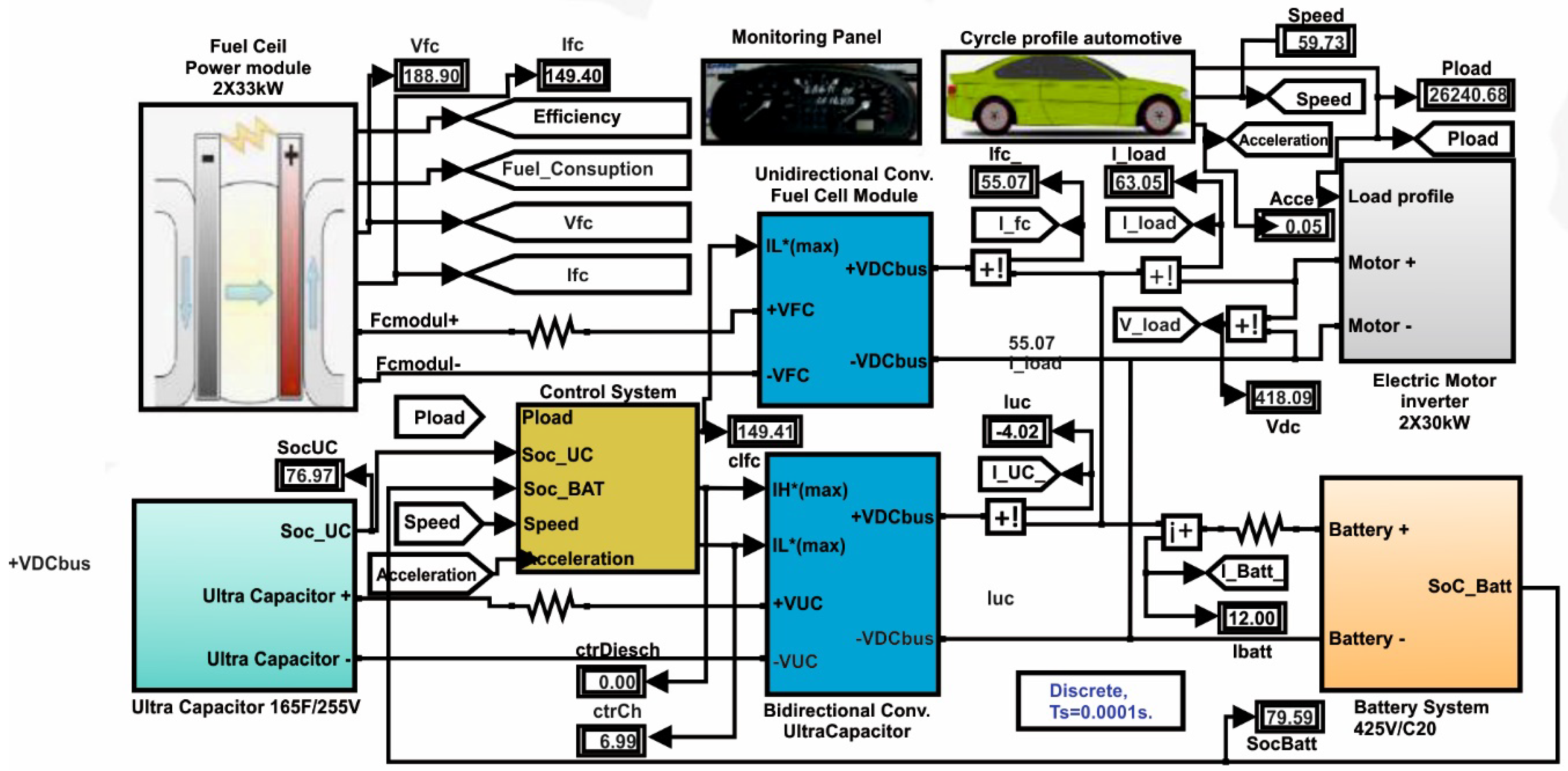
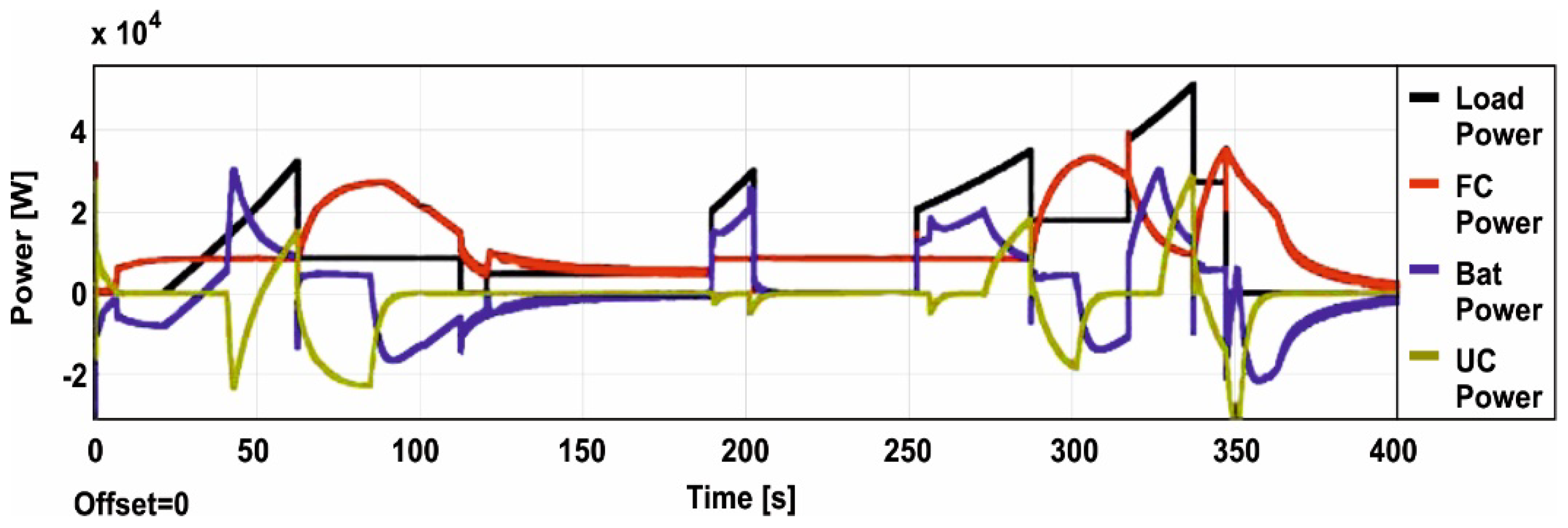
3. Simulating the Electric Vehicle Powertrain
4. Power Management Strategy in a FC/Battery/UC Hybrid System
- -
- -
- -
- -
- to increase component lifetime [33].
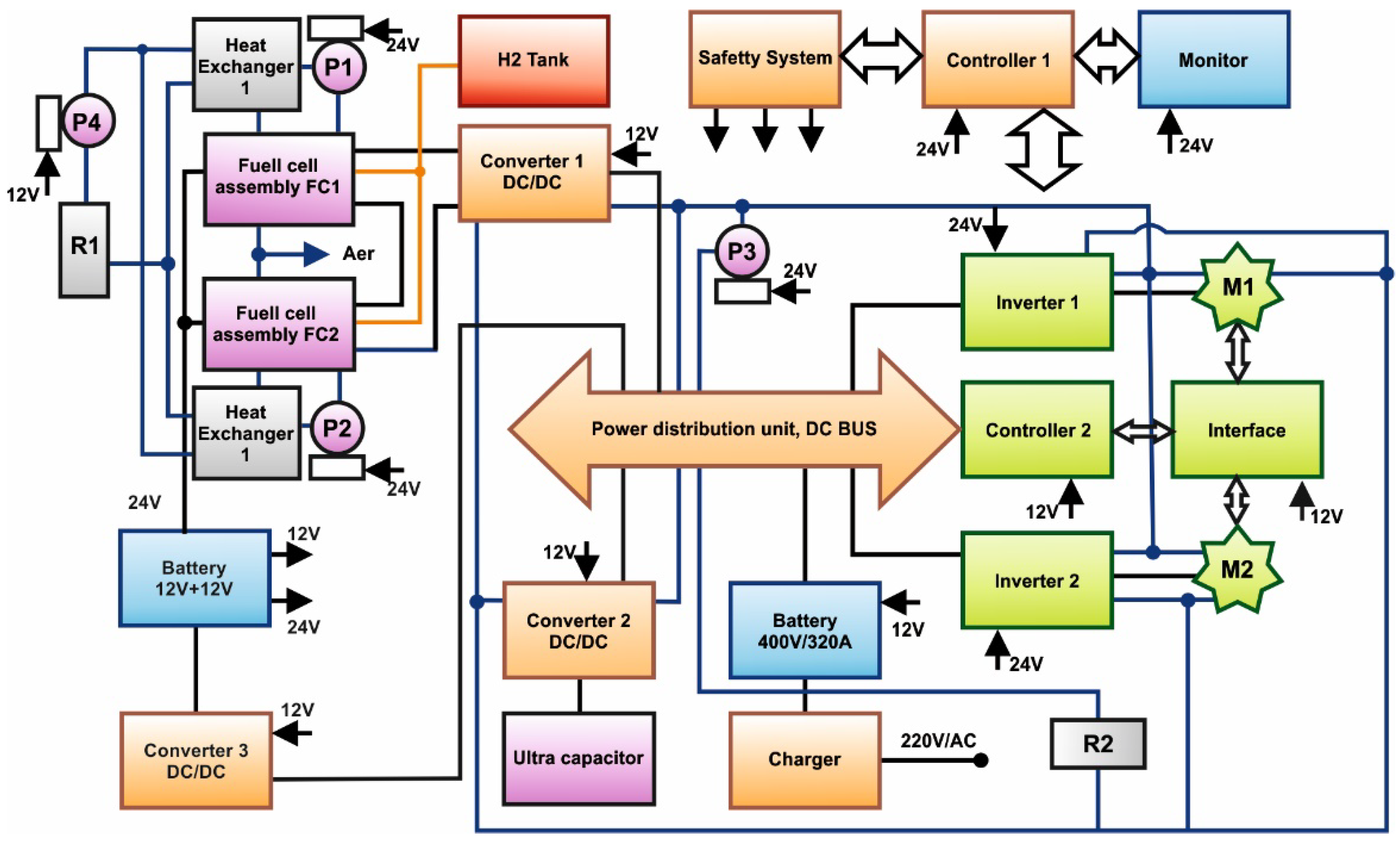
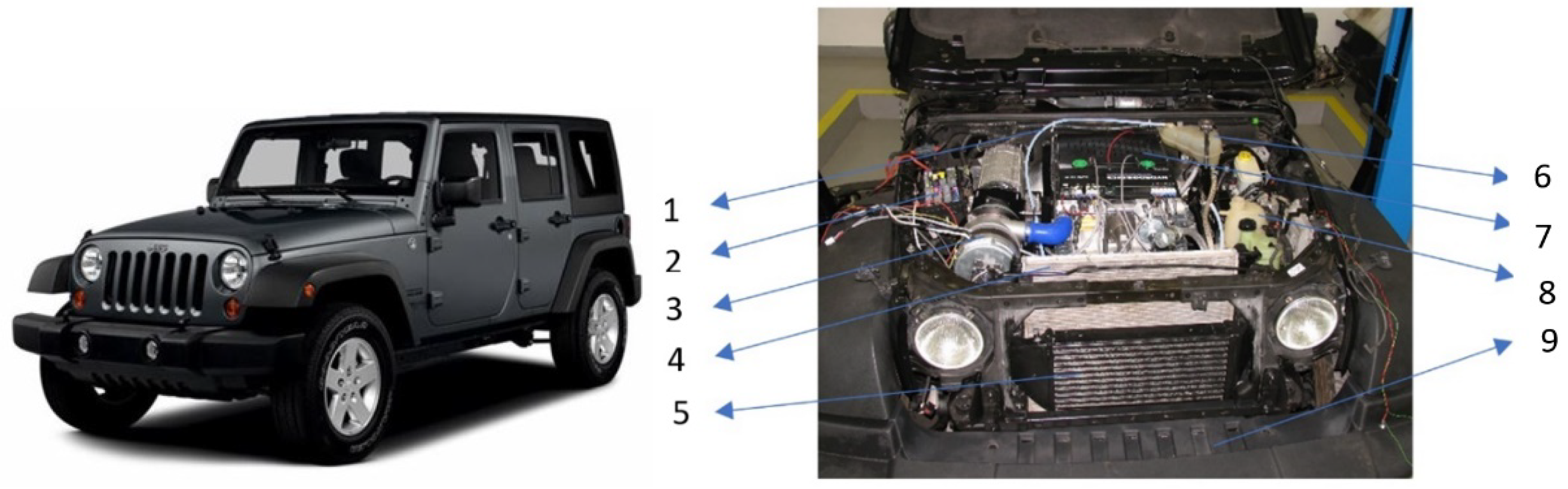
5. Case Study: Electric Vehicle in Fuel Cell/Battery/Ultracapacitor Hybrid Topology
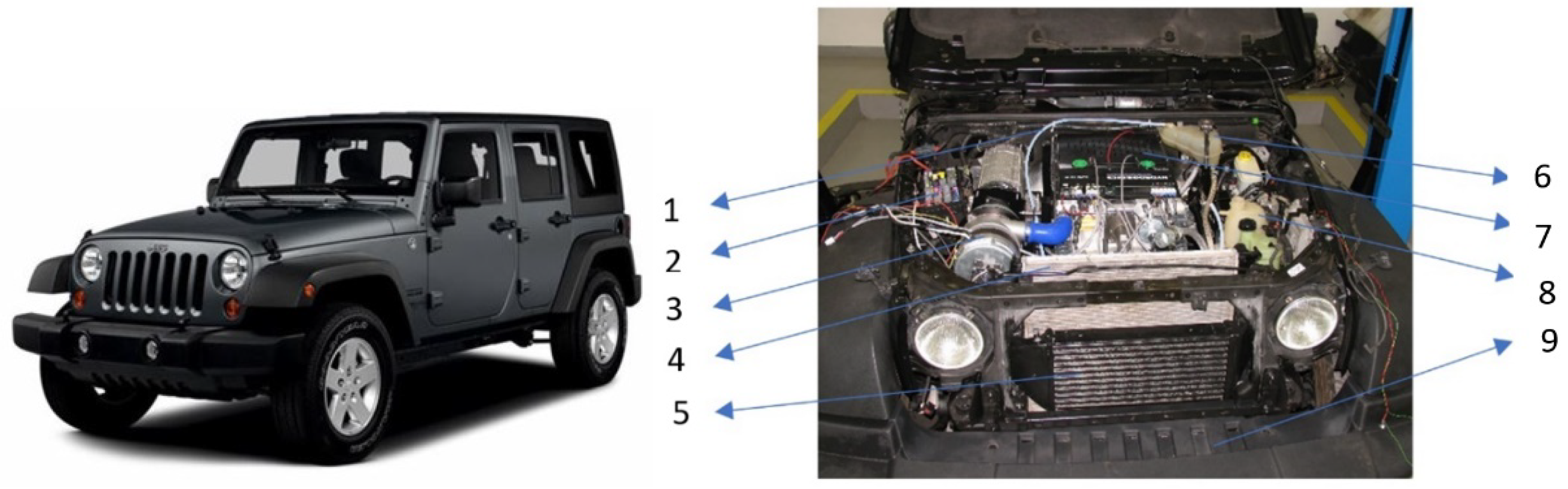
- two fuel cells each with 33 kW of power, connected in a series;
- a 30 kW rechargeable battery pack;
- five 48 V and 165 F ultracapacitor units connected in series;
- a power distribution unit (PDU);
- a unidirectional converter for connecting the fuel cell to the PDU;
- a bidirectional converter to connect the ultracapacitor to the PDU;
- a 24 V auxiliary battery charger (2 × 12 V);
- a main battery charging module from 230 V (AC);
- two 33 kW electric motors mounted on the rear wheels;
- two motor inverters;
- command and control modules for the propulsion system;
- two 50 L at 350 bar hydrogen cylinders; and
- auxiliary equipment (water pumps, vacuum pumps, temperature sensors, hydrogen sensors, etc.).
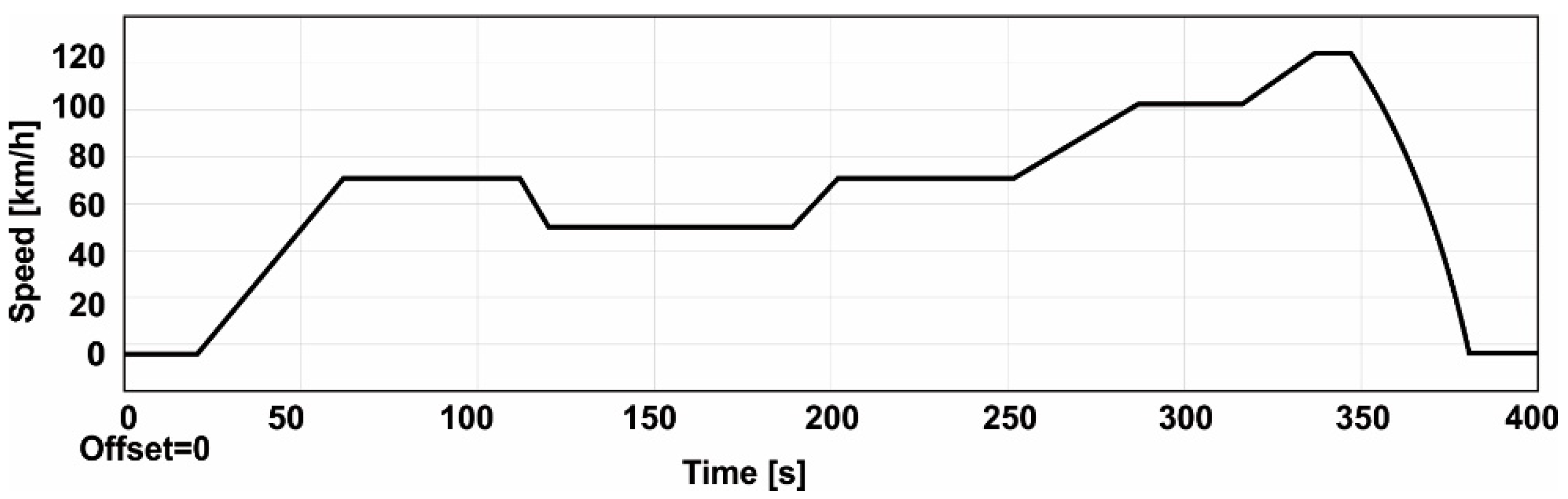
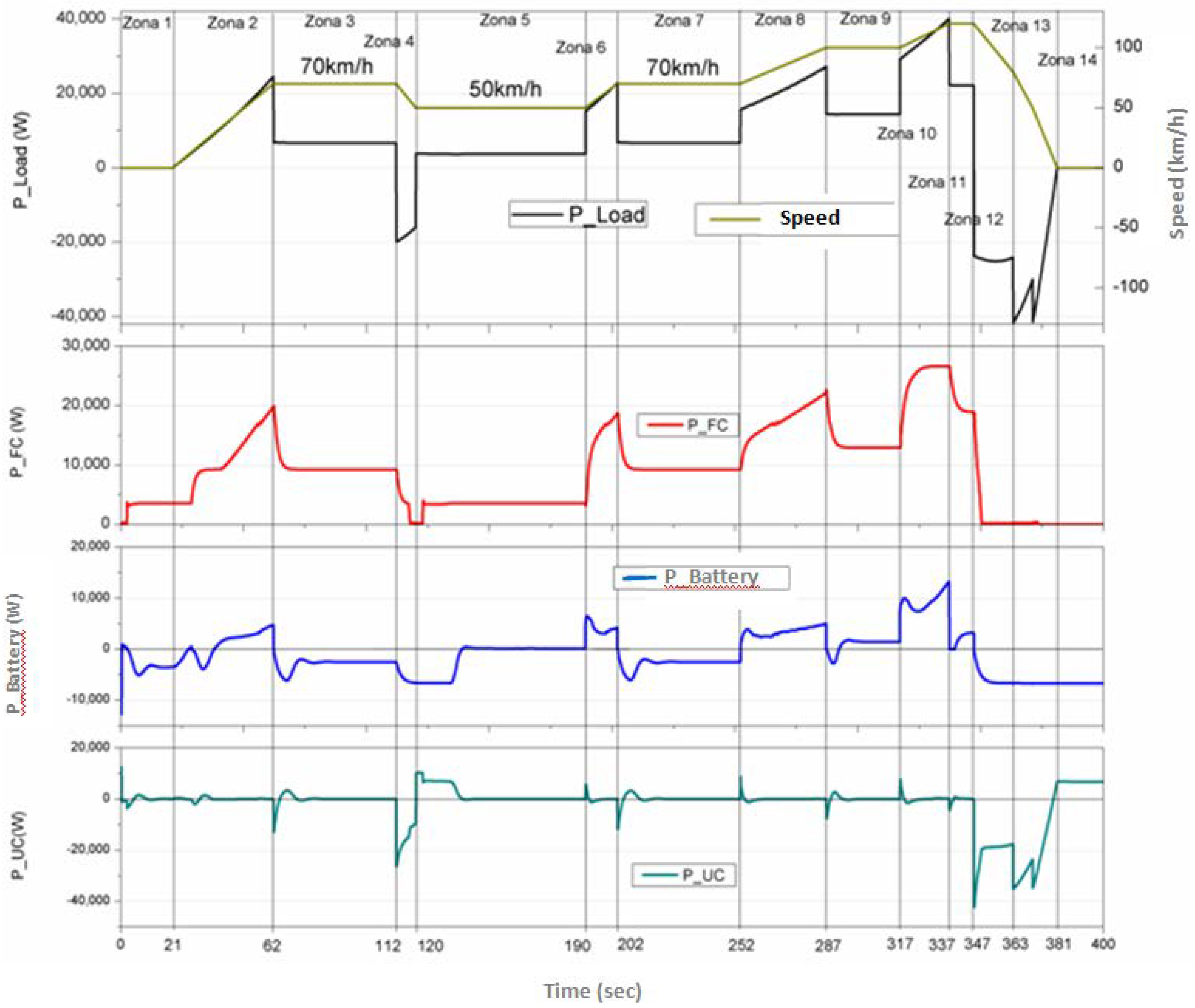
- The urban cycle driving autonomy was 2 h 20 min at an average speed of 45 km/h.
- The extra-urban cycle driving autonomy was 2 h 50 min at an average speed of 70 km/h.
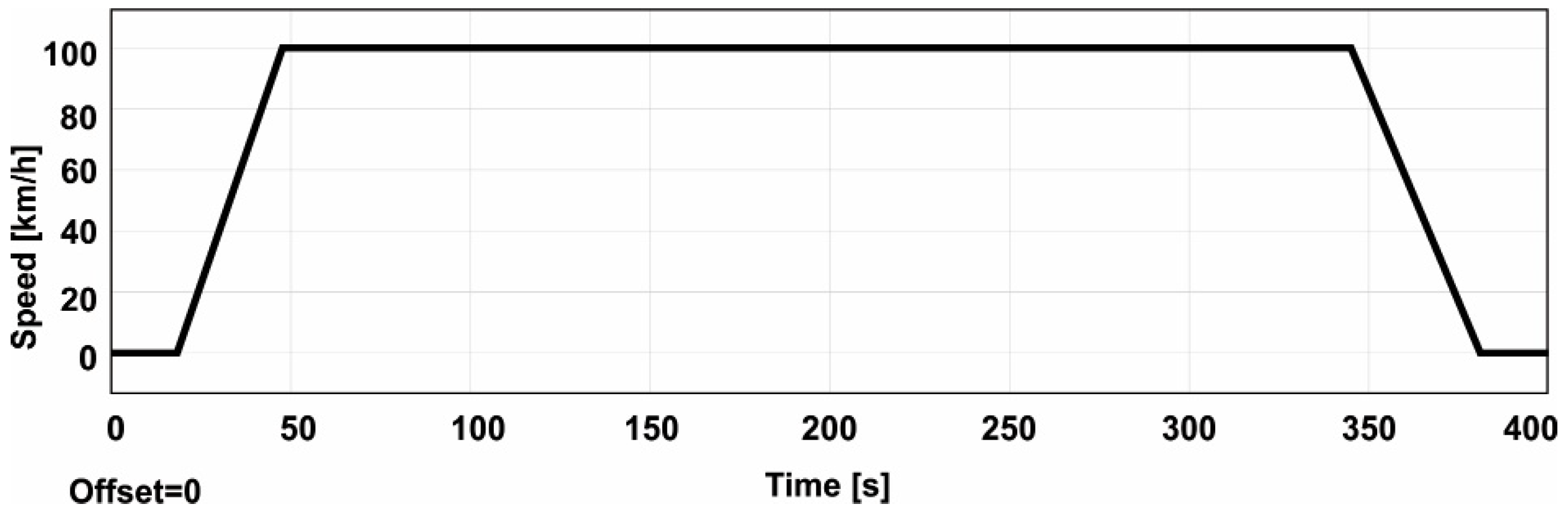
- The maximum imposed speed was 120 km/h.
- The vehicle, upon departure, reached 100 km/h in 38 s.
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Larminie, J.; Dicks, A. Fuel Cell Systems Explained, 2nd ed.; Wiley & Sons Ltd.: Chichester, UK, 2003. [Google Scholar]
- Balat, M. Potential importance of hydrogen as a future solution to environmental and transportation problems. Int. J. Hydrogen Energy 2008, 33, 4013–4029. [Google Scholar] [CrossRef]
- European Economic Area. Renewable Energy in Europe 2016; European Environment Agency, EU Publication: Copenhagen, Denmark, 2016. [Google Scholar] [CrossRef]
- Dincer, I.; Acar, C. Review and evaluation of hydrogen production methods for better sustainability. Int. J. Hydrogen Energy 2015, 40, 11094–11111. [Google Scholar] [CrossRef]
- Piela, P.; Mitzel, J. Polymer electrolyte membrane fuel cell efficiency at the stack level. J. Power Sources 2015, 292, 95–103. [Google Scholar] [CrossRef]
- Pavelka, M.; Marsik, F. Detailed thermodynamic analysis of polymer electrolyte membrane fuel cell efficiency. Int. J. Hydrogen Energy 2013, 38, 7102–7113. [Google Scholar] [CrossRef]
- Hwang, J.-J. Effect of hydrogen delivery schemes on fuel cell efficiency. J. Power Sources 2013, 239, 54–63. [Google Scholar] [CrossRef]
- Das, H.S.; Tan, C.W.; Yatim, A.H.M. Fuel cell hybrid electric vehicles: A review on power conditioning units and topologies. Renew. Sustain. Energy Rev. 2017, 76, 268–291. [Google Scholar] [CrossRef]
- Ahmadi, S.; Bathaee, S.M.T.; Hosseinpour, A.H. Improving fuel economy and performance of a fuel-cell hybrid electric vehicle (fuel-cell, battery, and ultra-capacitor) using optimized energy management strategy. Energy Convers. Manag. 2018, 160, 74–84. [Google Scholar] [CrossRef]
- Munteanu, R.; Cimpeanu, A.; Graur, A.; Filote, C.; Liuba, G. Quasi-stationary and Transient Regime of Induction Machine Supplied by Two Stator Frequencies. Adv. Electr. Comput. Eng. 2014, 14, 131–136. [Google Scholar] [CrossRef]
- Song, Z.; Zhang, X.; Li, J.; Hofmann, H.; Ouyang, M.; Du, J. Component sizing optimization of plug-in hybrid electric vehicles with the hybrid energy storage system. Energy 2018, 144, 393–403. [Google Scholar] [CrossRef]
- Ruan, J.; Walker, P.D.; Zhang, N.; Wu, J. An investigation of hybrid energy storage system in multi-speed electric vehicle. Energy 2017, 140, 291–306. [Google Scholar] [CrossRef]
- Bizon, N. A new topology of fuel cell hybrid power source for efficient operation and high reliability. J. Power Sources 2011, 196, 3260–3270. [Google Scholar] [CrossRef]
- Wang, G.; Huang, F.; Yu, Y.; Wen, S.; Tu, Z. Degradation behavior of a proton exchange membrane fuel cell stack under dynamic cycles between idling and rated condition. Int. J. Hydrogen Energy 2018, 43, 4471–4481. [Google Scholar] [CrossRef]
- Gazdzick, P.; Mitzel, J.; Garcia Sanchez, D.; Schulze, M.; Friedrich, K.A. Evaluation of reversible and irreversible degradation rates of polymer electrolyte membrane fuel cells tested in automotive conditions. J. Power Sources 2016, 327, 86–95. [Google Scholar] [CrossRef]
- Dafalla, A.M.; Jiang, F. Stresses and their impacts on proton exchange membrane fuel cells: A review. Int. J. Hydrogen Energy 2018, 43, 2327–2348. [Google Scholar] [CrossRef]
- Fletcher, T.; Thring, R.; Watkinson, M. An Energy Management Strategy to concurrently optimise fuel consumption & PEM fuel cell lifetime in a hybrid vehicle. Int. J. Hydrogen Energy 2016, 41, 21503–21515. [Google Scholar] [CrossRef]
- Marzougui, H.; Amari, M.; Kadri, A.; Bacha, F.; Ghouili, J. Energy management of fuel cell/battery/ultracapacitor in electrical hybrid vehicle. Int. J. Hydrogen Energy 2017, 42, 8857–8869. [Google Scholar] [CrossRef]
- Bizon, N.; Oproescu, M.; Raceanu, M. Efficient energy control strategies for a Standalone Renewable/Fuel Cell Hybrid Power Source. Energy Convers. Manag. 2015, 90, 93–110. [Google Scholar] [CrossRef]
- Bizon, N. Real-time optimization strategy for fuel cell hybrid power sources with load-following control of the fuel or air flow. Energy Convers. Manag. 2018, 157, 13–27. [Google Scholar] [CrossRef]
- Zhou, D.; Ravey, A.; Al-Durra, A.; Gao, F. A comparative study of extremum seeking methods applied to online energy management strategy of fuel cell hybrid electric vehicles. Energy Convers. Manag. 2017, 151, 778–790. [Google Scholar] [CrossRef]
- Ravey, A.; Watrin, N.; Blunier, B.; Bouquain, D.; Miraoui, A. Energy—Source-sizing methodology for hybrid fuel cell vehicles based on statistical description of driving cycles. IEEE Trans. Veh. Technol. 2012, 60, 4164–4174. [Google Scholar] [CrossRef]
- Liu, C.; Liu, L. Optimal power source sizing of fuel cell hybrid vehicles based on Pontryagin’s minimum principle. Int. J. Hydrogen Energy 2015, 40, 8454–8464. [Google Scholar] [CrossRef]
- Zhang, W.; Li, J.; Xu, L.; Ouyang, M. Optimization for a fuel cell/battery/capacity tram with equivalent consumption minimization strategy. Energy Convers. Manag. 2017, 134, 59–69. [Google Scholar] [CrossRef]
- Fernandez, R.A.; Caraballo, S.C.; Cilleruelo, F.B.; Lozano, J.A. Fuel optimization strategy for hydrogen fuel cell range extender vehicles applying genetic algorithms. Renew. Sustain. Energy Rev. 2018, 81 Pt 1, 655–668. [Google Scholar] [CrossRef]
- Bravo, J.; Ribau, J.; Silva, C. The influences of energy storage and energy management strategies on fuel consumption of a fuel cell hybrid vehicle. IFAC Proc. Vol. 2012, 45, 233–240. [Google Scholar] [CrossRef]
- Bizon, N. Energy efficiency for the multiport power converters architectures of series and parallel hybrid power source type used in plug-in/V2G fuel cell vehicles. Appl. Energy 2013, 102, 726–734. [Google Scholar] [CrossRef]
- Hu, X.; Murgovski, N.; Johannesson, L.; Egardt, B. Energy efficiency analysis of a series plug-in hybrid electric bus with different energy management strategies and battery sizes. Appl. Energy 2013, 111, 1001–1009. [Google Scholar] [CrossRef]
- Opitz, A.; Badami, P.; Shen, L.; Vignarooban, K.; Kannan, A.M. Can Li-Ion batteries be the panacea for automotive applications? Renew. Sustain. Energy Rev. 2017, 68 Pt 1, 685–692. [Google Scholar] [CrossRef]
- Ruiz, V.; Pfrang, A.; Kriston, A.; Omar, N.; Van den Bossche, P.; Boon-Brett, L. A review of international abuse testing standards and regulations for lithium ion batteries in electric and hybrid electric vehicles. Renew. Sustain. Energy Rev. 2018, 81, 1427–1452. [Google Scholar] [CrossRef]
- Li, Z.; Huang, J.; Liaw, B.Y.; Zhang, J. On state-of-charge determination for lithium-ion batteries. J. Power Sources 2017, 348, 281–301. [Google Scholar] [CrossRef]
- Hannan, M.A.; Lipu, M.S.H.; Hussain, A.; Mohamed, A. A review of lithium-ion battery state of charge estimation and management system in electric vehicle applications: Challenges and recommendations. Renew. Sustain. Energy Rev. 2017, 78, 834–854. [Google Scholar] [CrossRef]
- Han, J.; Park, Y.; Park, Y.-S. A novel updating method of equivalent factor in ECMS for prolonging the lifetime of battery in fuel cell hybrid electric vehicle. IFAC Proc. Vol. 2012, 45, 227–232. [Google Scholar] [CrossRef]
- Li, Q.; Yang, H.; Han, Y.; Li, M.; Chen, W. A state machine strategy based on droop control for an energy management system of PEMFC-battery-supercapacitor hybrid tramway. Int. J. Hydrogen Energy 2016, 41, 16148–16159. [Google Scholar] [CrossRef]
- Lai, C.M.; Yang, M.J. A High-Gain Three-Port Power Converter with Fuel Cell, Battery Sources and Stacked Output for Hybrid Electric Vehicles and DC-Microgrids. Energies 2016, 9, 180. [Google Scholar] [CrossRef]
- Aschilean, I.; Rasoi, G.; Raboaca, M.S.; Filote, C.; Culcer, M. Design and Concept of an Energy System Based on Renewable Sources for Greenhouse Sustainable Agriculture. Energies 2018, 11, 1201. [Google Scholar] [CrossRef]
- Tribioli, L. Energy-Based Design of Powertrain for a Re-Engineered Post-Transmission Hybrid Electric Vehicle. Energies 2017, 10, 918. [Google Scholar] [CrossRef]
- Sim, K.; Oh, S.-M.; Kang, K.-Y.; Hwang, S.-H. A Control Strategy for Mode Transition with Gear Shifting in a Plug-In Hybrid Electric Vehicle. Energies 2017, 10, 1043. [Google Scholar] [CrossRef]
- Ott, T.; Onder, C.; Guzzella, L. Hybrid-Electric Vehicle with Natural Gas-Diesel Engine. Energies 2013, 6, 3571–3592. [Google Scholar] [CrossRef]
- Solouk, A.; Shahbakhti, M. Energy Optimization and Fuel Economy Investigation of a Series Hybrid Electric Vehicle Integrated with Diesel/RCCI Engines. Energies 2016, 9, 1020. [Google Scholar] [CrossRef]
- Han, Y.; Chen, W.; Li, Q. Energy Management Strategy Based on Multiple Operating States for a Photovoltaic/Fuel Cell/Energy Storage DC Microgrid. Energies 2017, 10, 136. [Google Scholar] [CrossRef]
- Odeim, F.; Roes, J.; Heinzel, A. Power Management Optimization of an Experimental Fuel Cell/Battery/Supercapacitor Hybrid System. Energies 2015, 8, 6302–6327. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
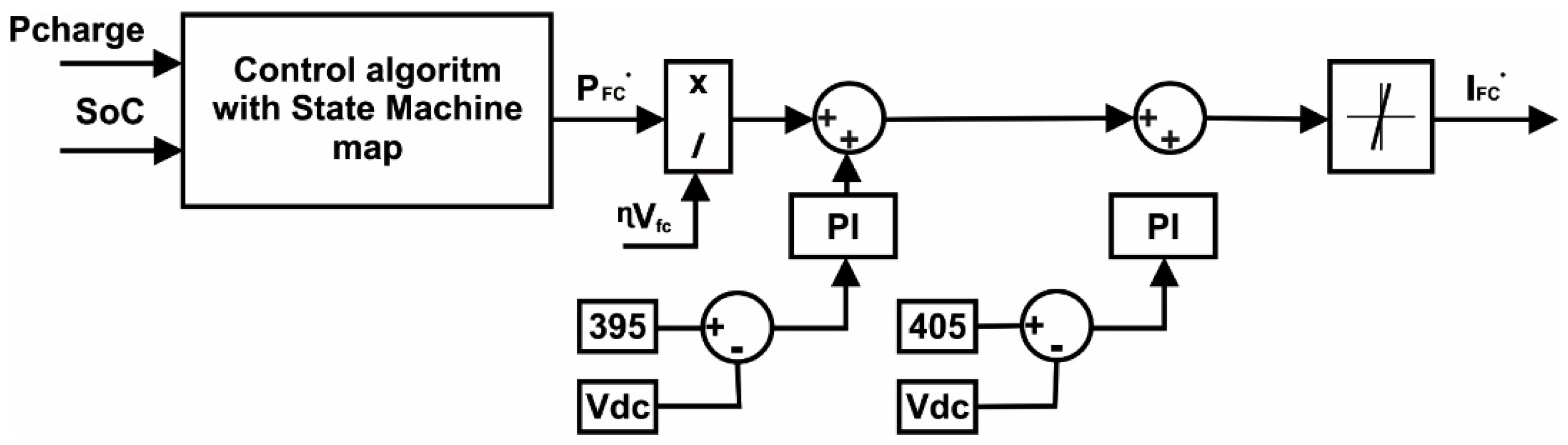
| If SoC > 90 & Pload < Pfcmin | Status = 1 | Pfc = Pfcmin |
| If SoC > 90 & Pload [Pfcmin, Pfcmax] | Status = 2 | Pfc = Pload |
| If SoC > 90 & Pload ≥ Pfcmax | Status = 3 | Pfc = Pfcmax |
| If SoC [65.85] & Pload < Pfcopt | Status = 4 | Pfc = Pfcopt |
| If SoC [65.85] & Pload [Pfcopt, Pfcmax] | Status = 5 | Pfc = Pload |
| If SoC [65.85] & Pload ≥ Pfcmax | Status = 6 | Pfc = Pfcmax |
| If SoC < 60 & Pload < Pfcmax | Status = 7 | Pfc = Pload + Pcharge |
| If SoC < 60 & Pload ≥ Pfcmax | Status = 8 | Pfc = Pfcmax |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aschilean, I.; Varlam, M.; Culcer, M.; Iliescu, M.; Raceanu, M.; Enache, A.; Raboaca, M.S.; Rasoi, G.; Filote, C. Hybrid Electric Powertrain with Fuel Cells for a Series Vehicle. Energies 2018, 11, 1294. https://doi.org/10.3390/en11051294
Aschilean I, Varlam M, Culcer M, Iliescu M, Raceanu M, Enache A, Raboaca MS, Rasoi G, Filote C. Hybrid Electric Powertrain with Fuel Cells for a Series Vehicle. Energies. 2018; 11(5):1294. https://doi.org/10.3390/en11051294
Chicago/Turabian StyleAschilean, Ioan, Mihai Varlam, Mihai Culcer, Mariana Iliescu, Mircea Raceanu, Adrian Enache, Maria Simona Raboaca, Gabriel Rasoi, and Constantin Filote. 2018. "Hybrid Electric Powertrain with Fuel Cells for a Series Vehicle" Energies 11, no. 5: 1294. https://doi.org/10.3390/en11051294