An Integrated Current-Voltage Compensator Design Method for Stable Constant Voltage and Current Source Operation of LLC Resonant Converters



Abstract
:1. Introduction
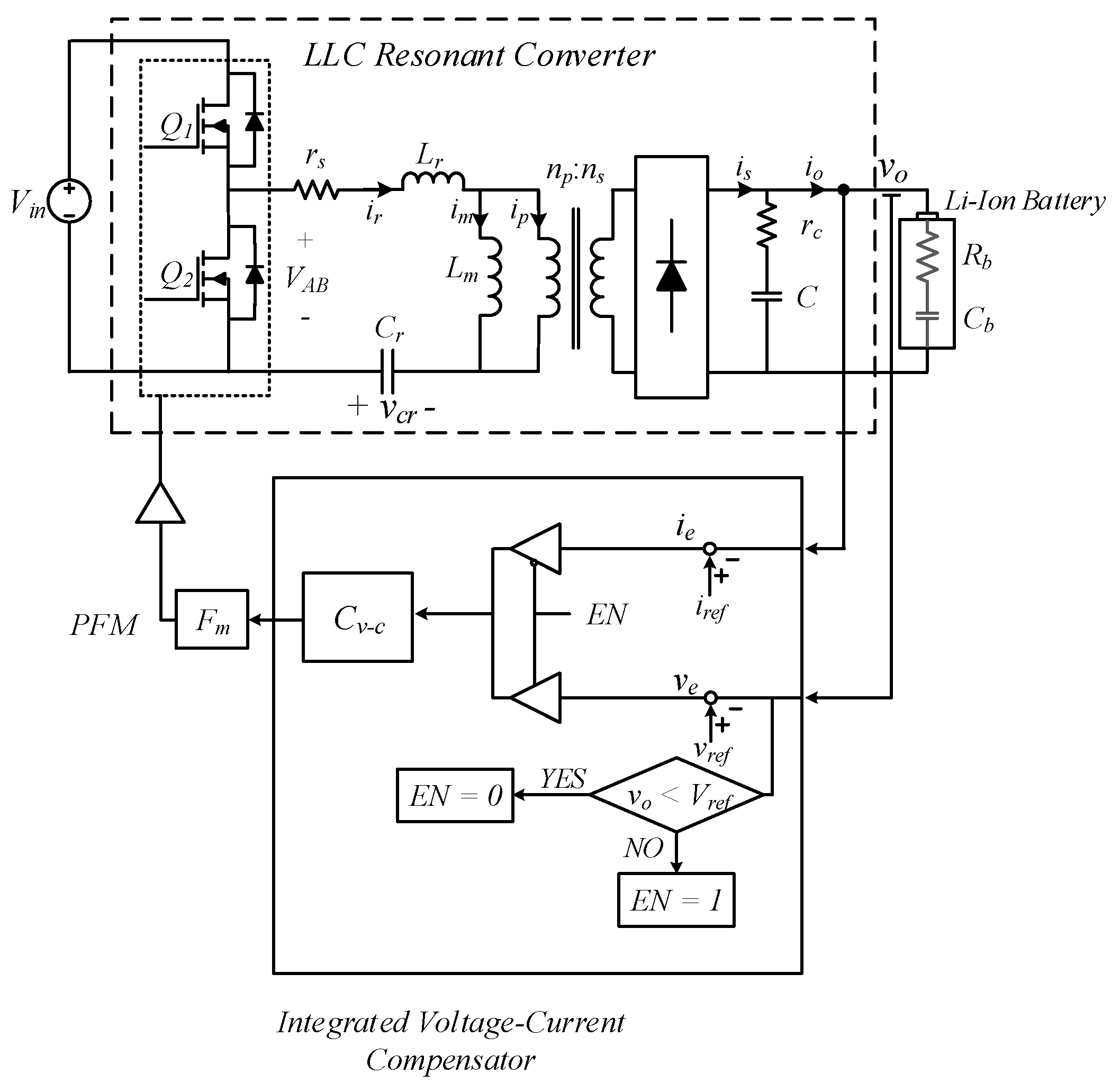
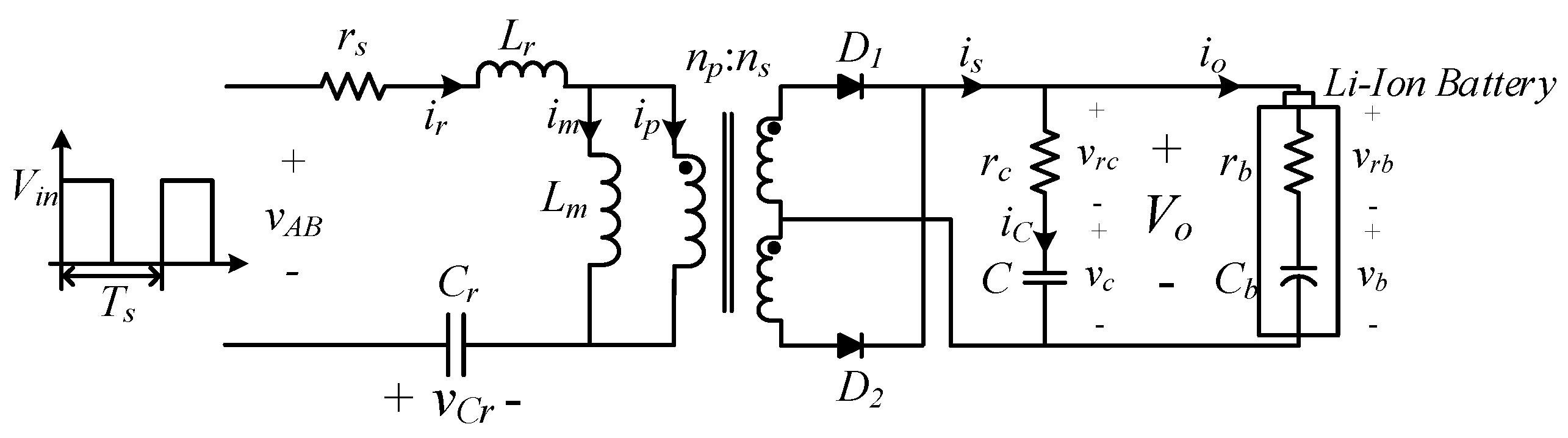
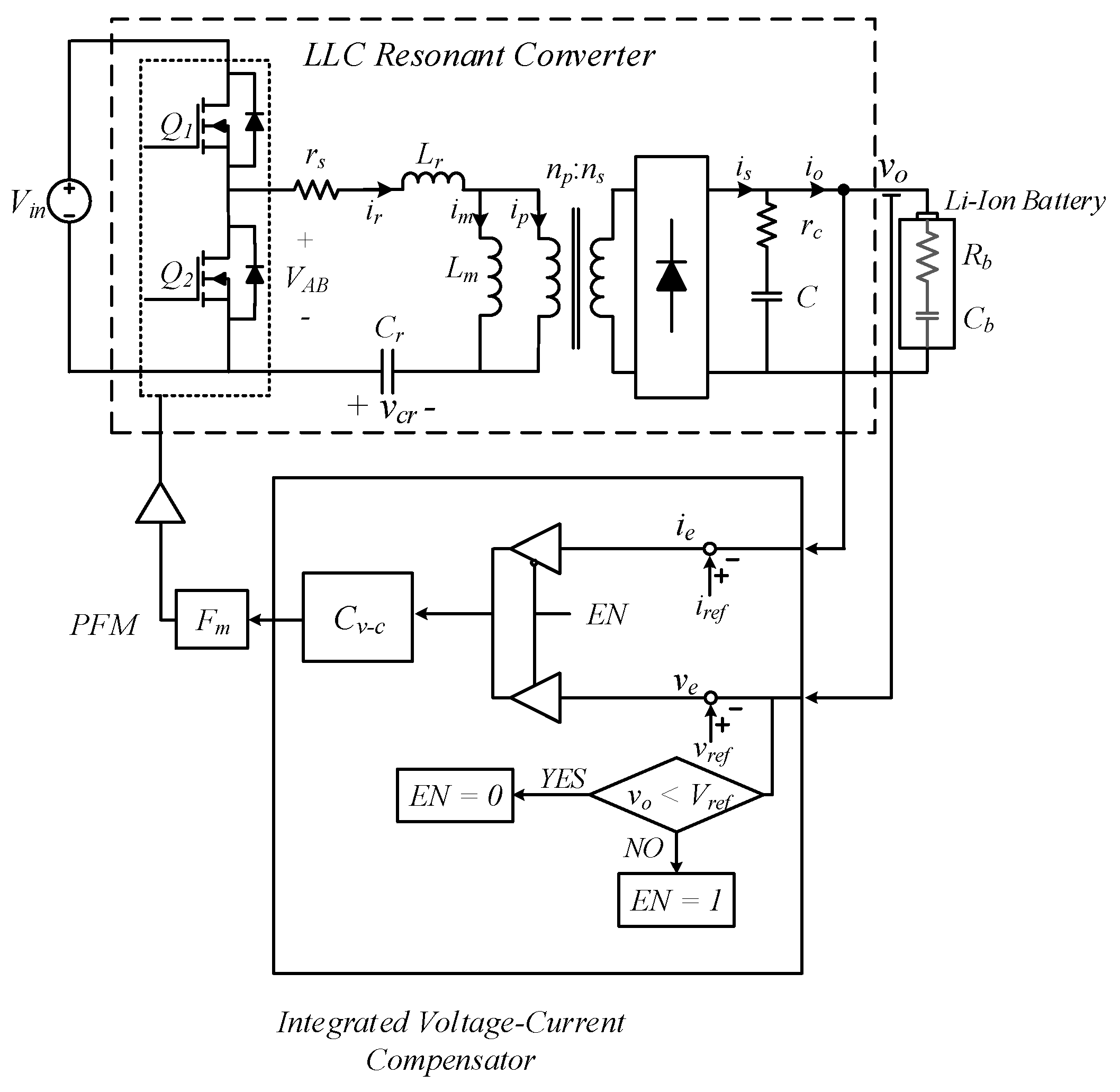
2. LLC Resonant Converter-Based Battery Charger
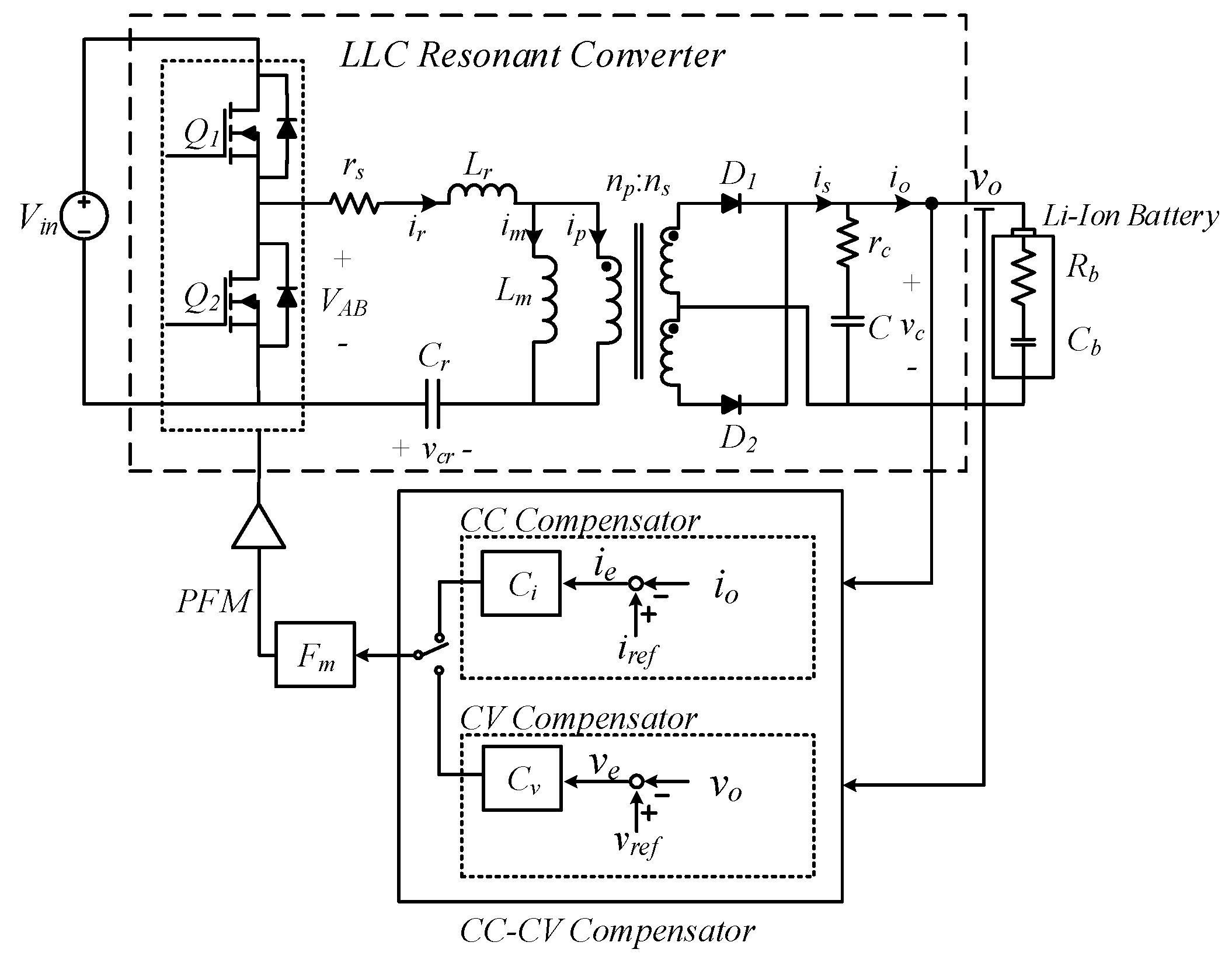
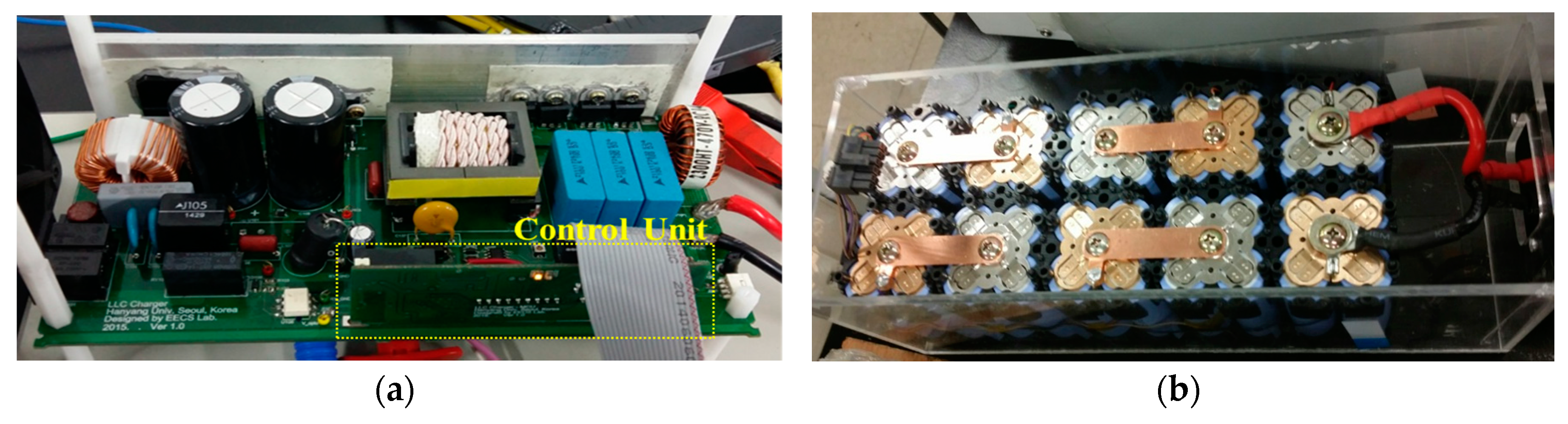
2.1. System Description
2.2. Li-Ion Battery Pack Modeling
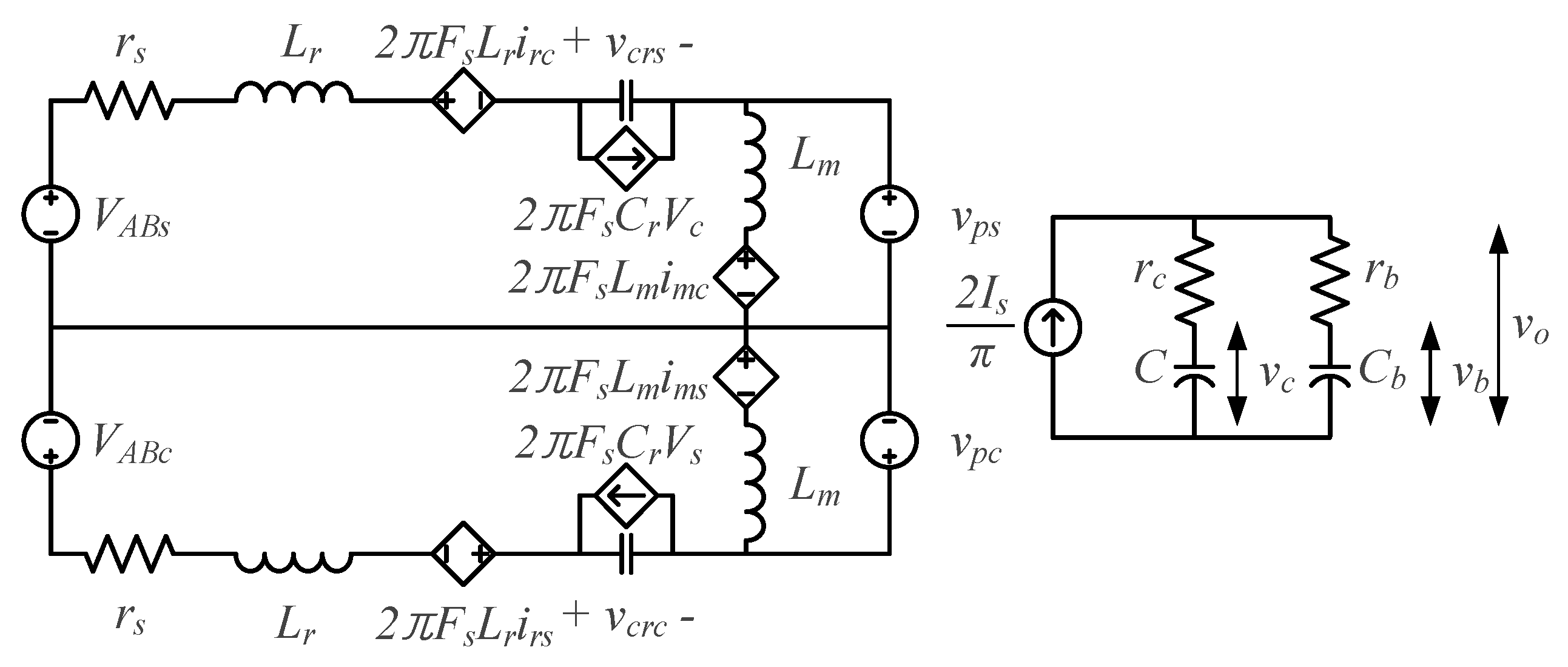
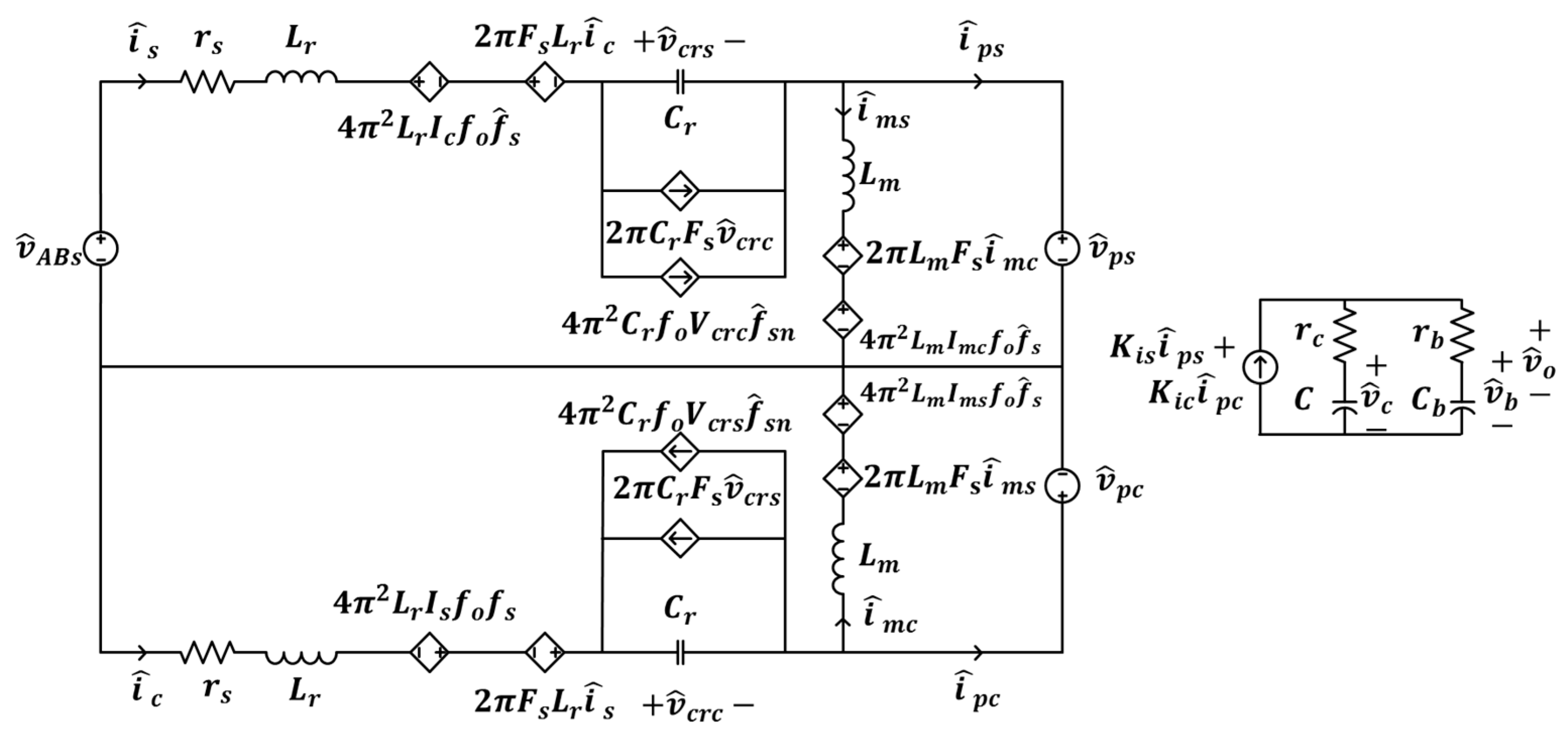
2.3. Modeling of LLC Resonant Converter-Based Battery Chargers
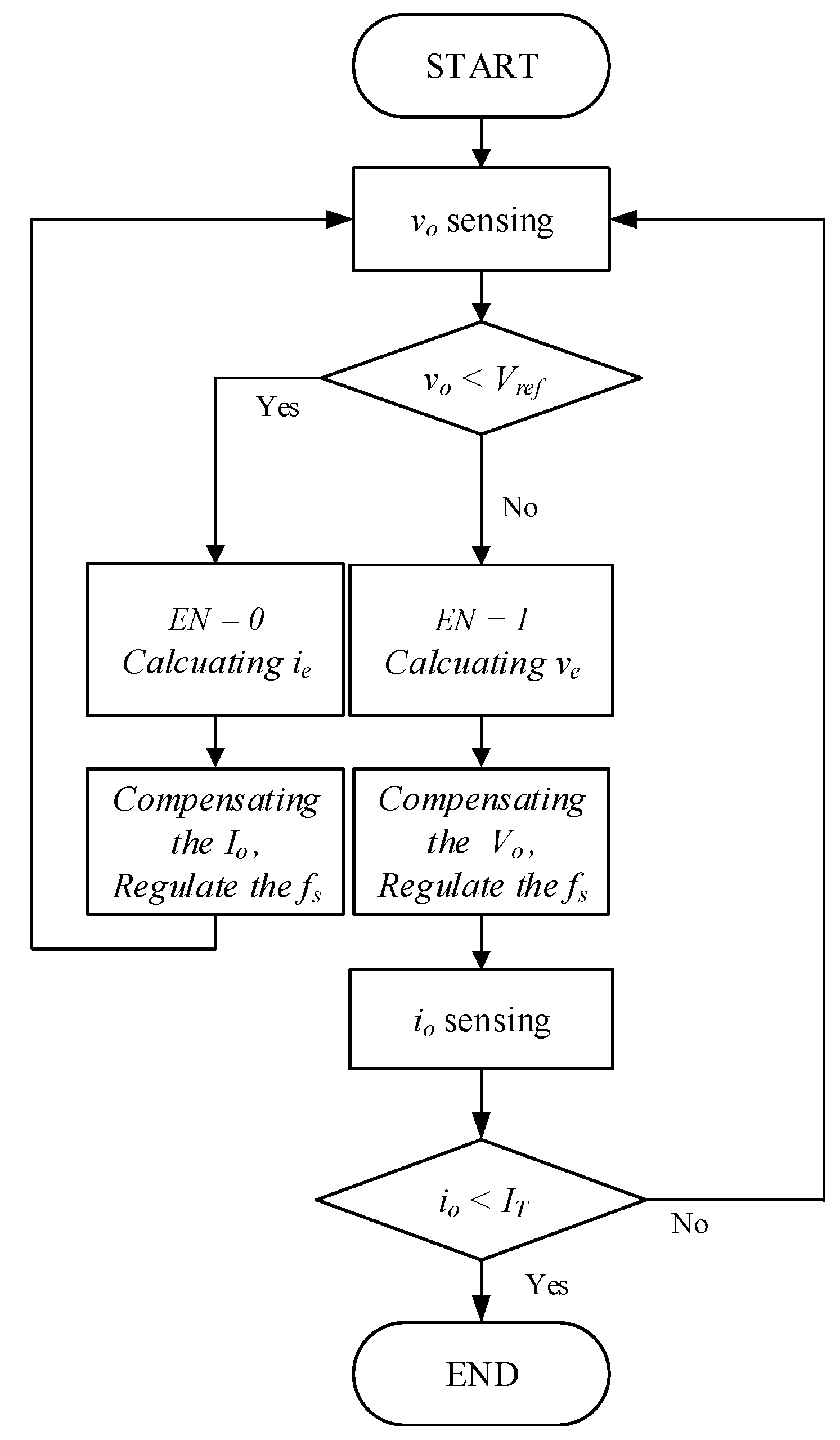
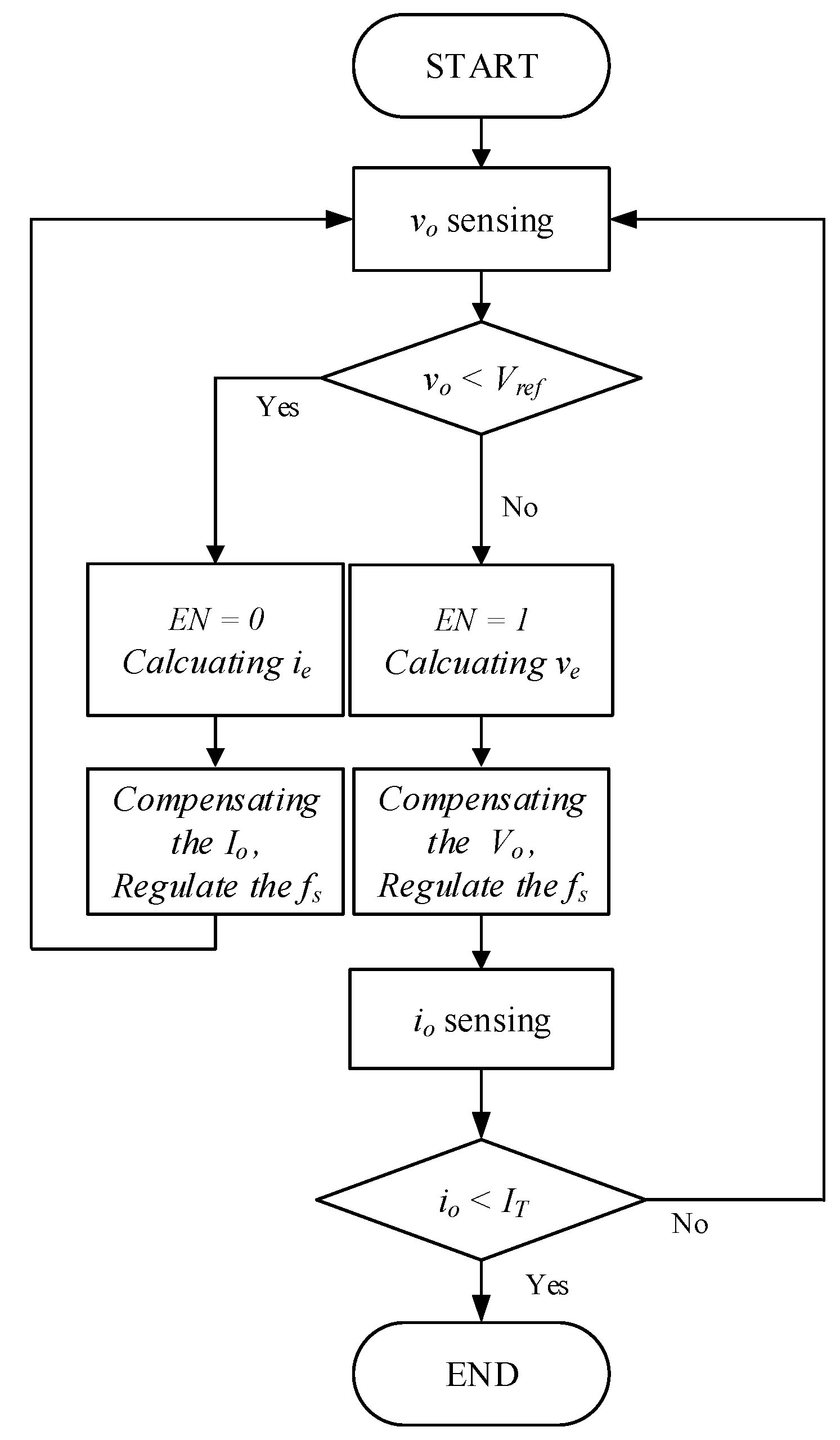
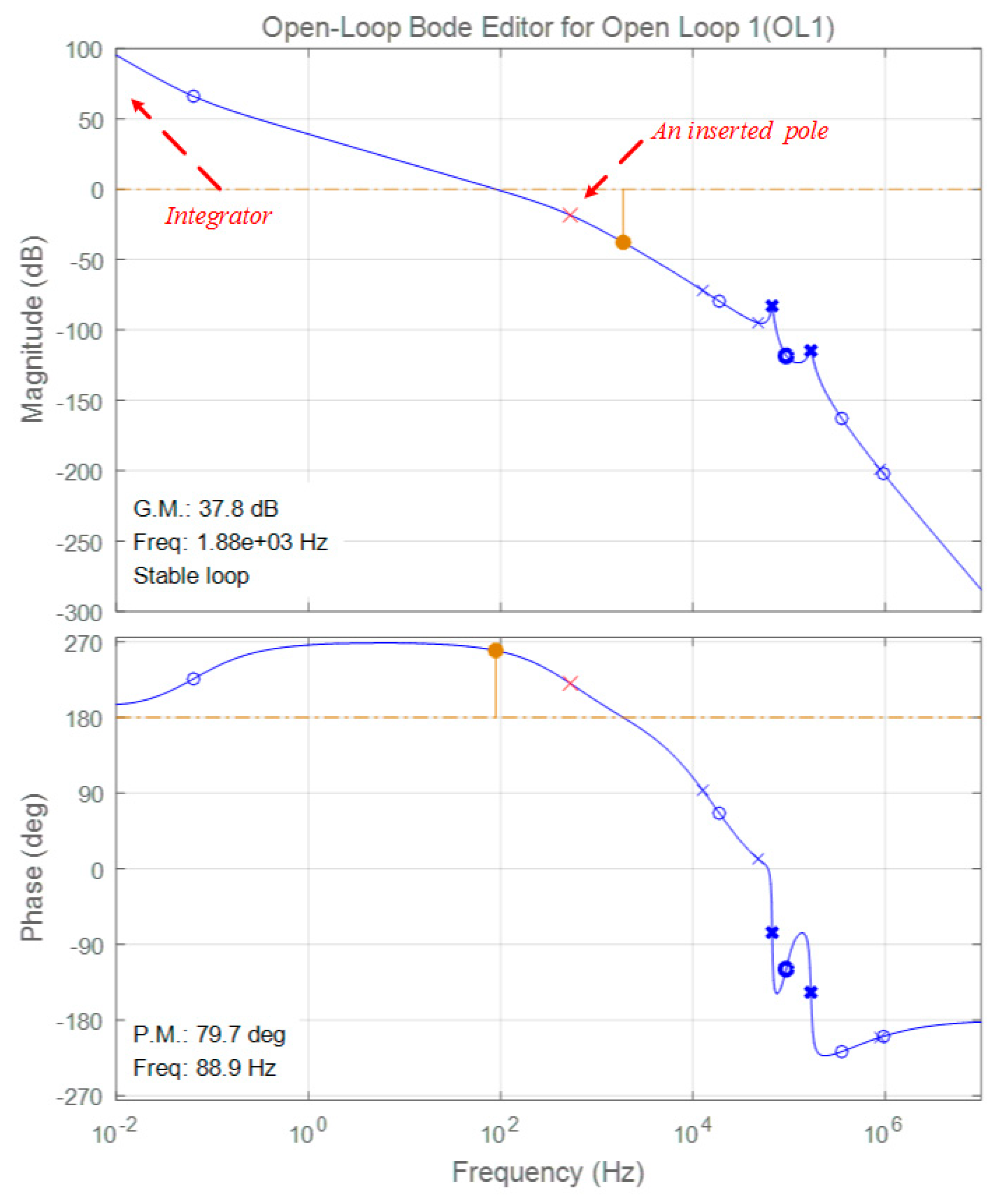
3. Integrated Current-Voltage Compensator
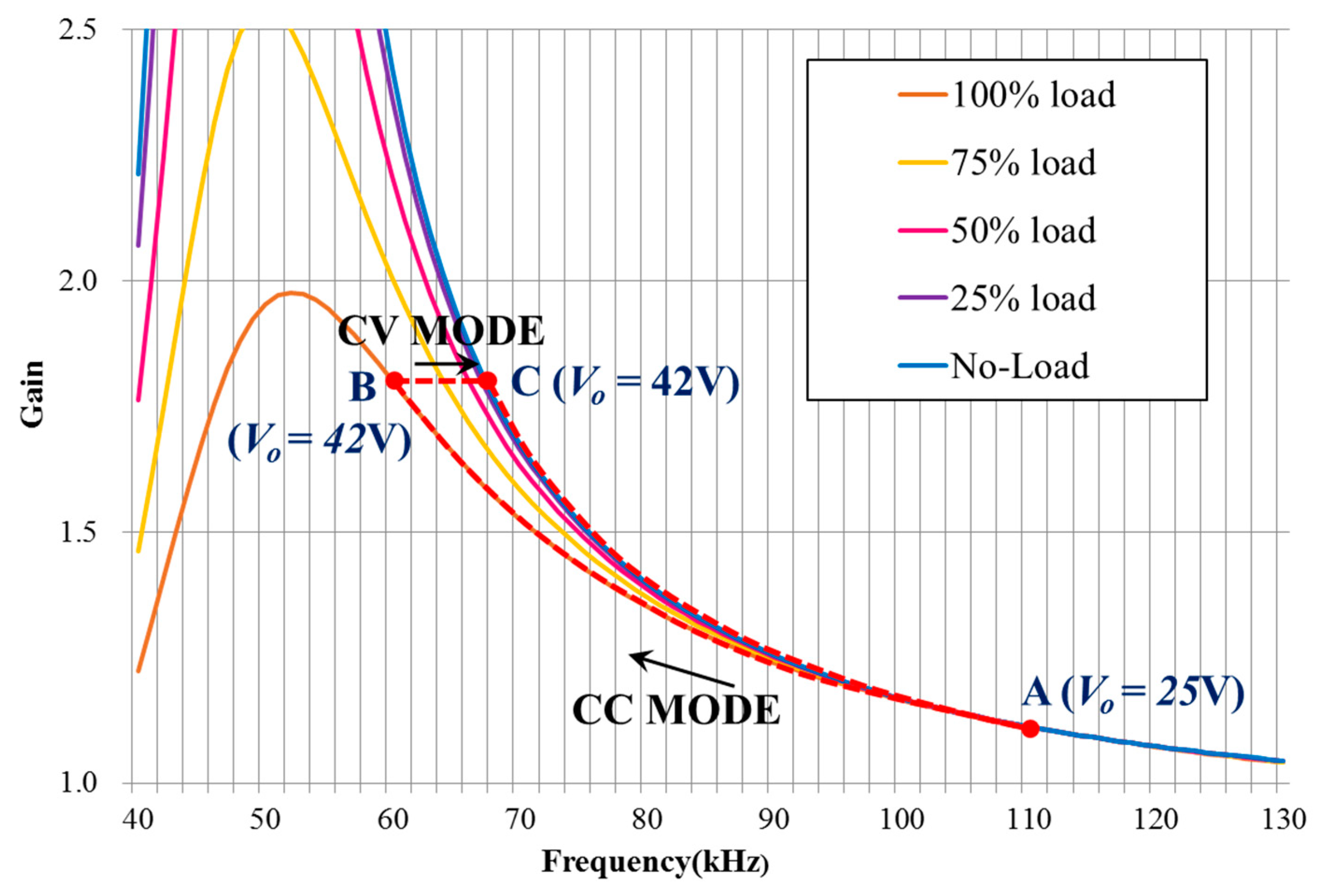
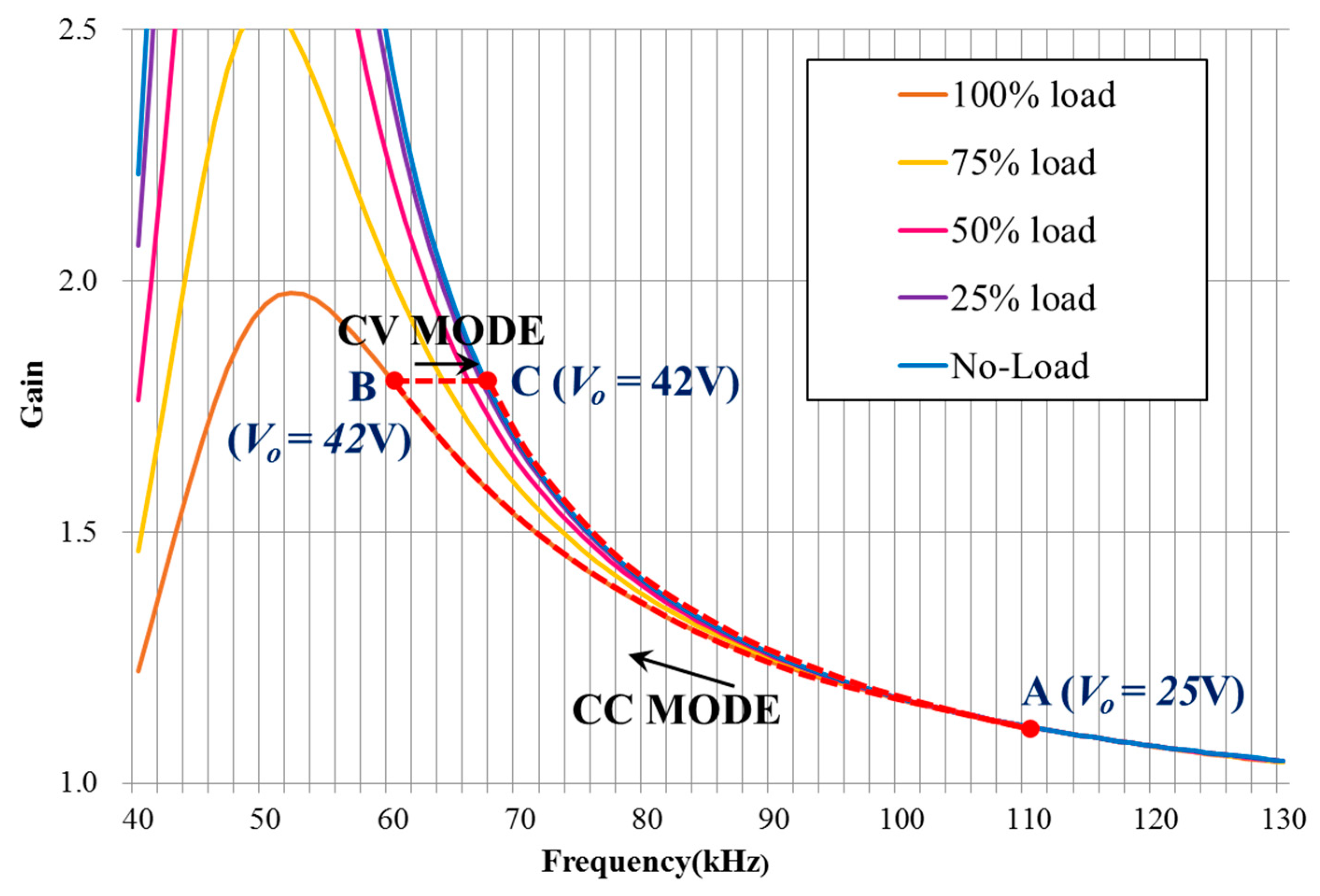
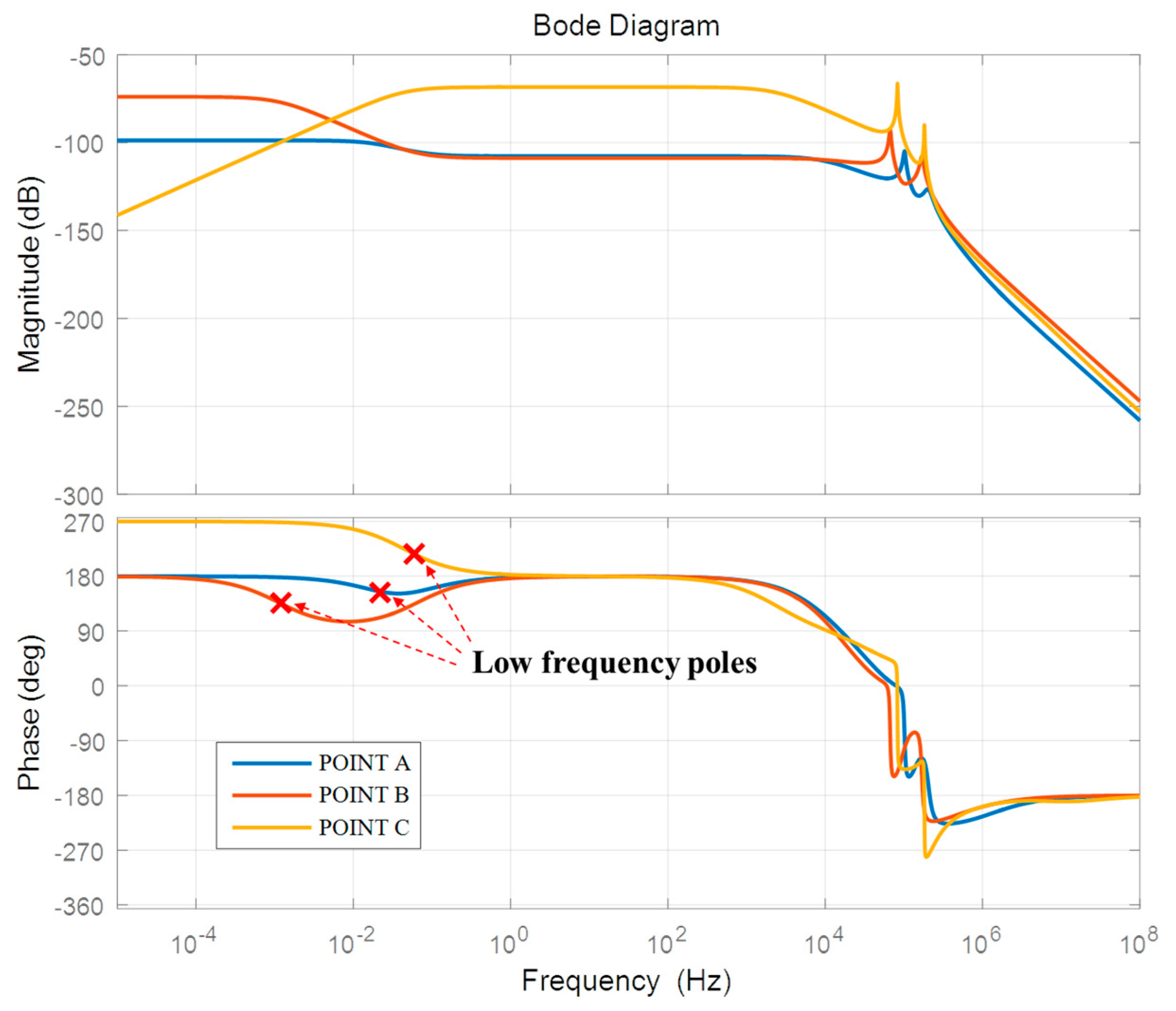
4. Compensator Design Example
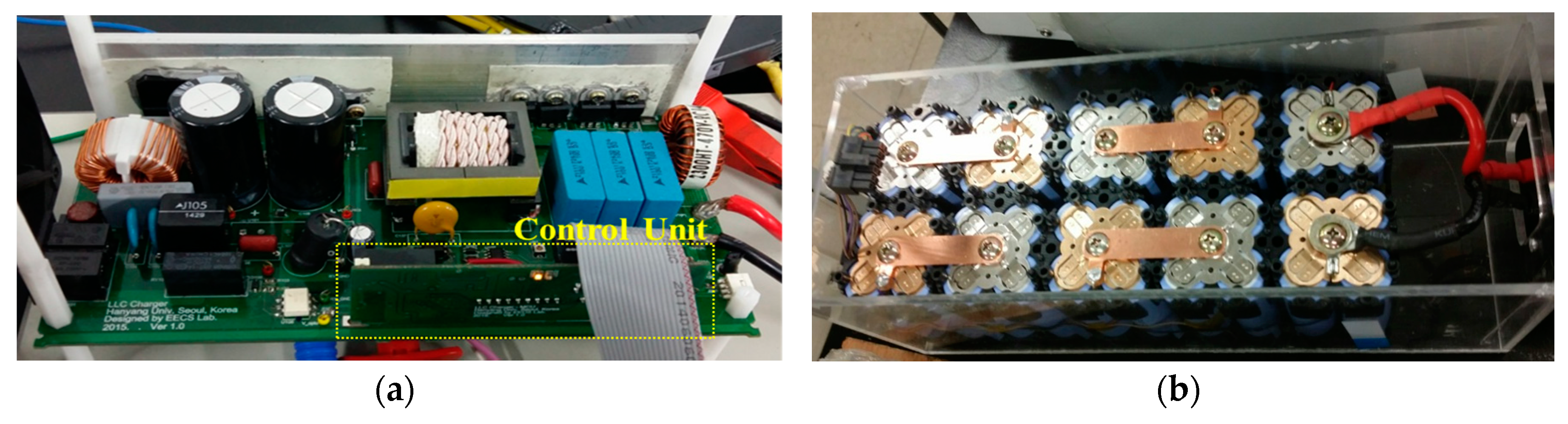
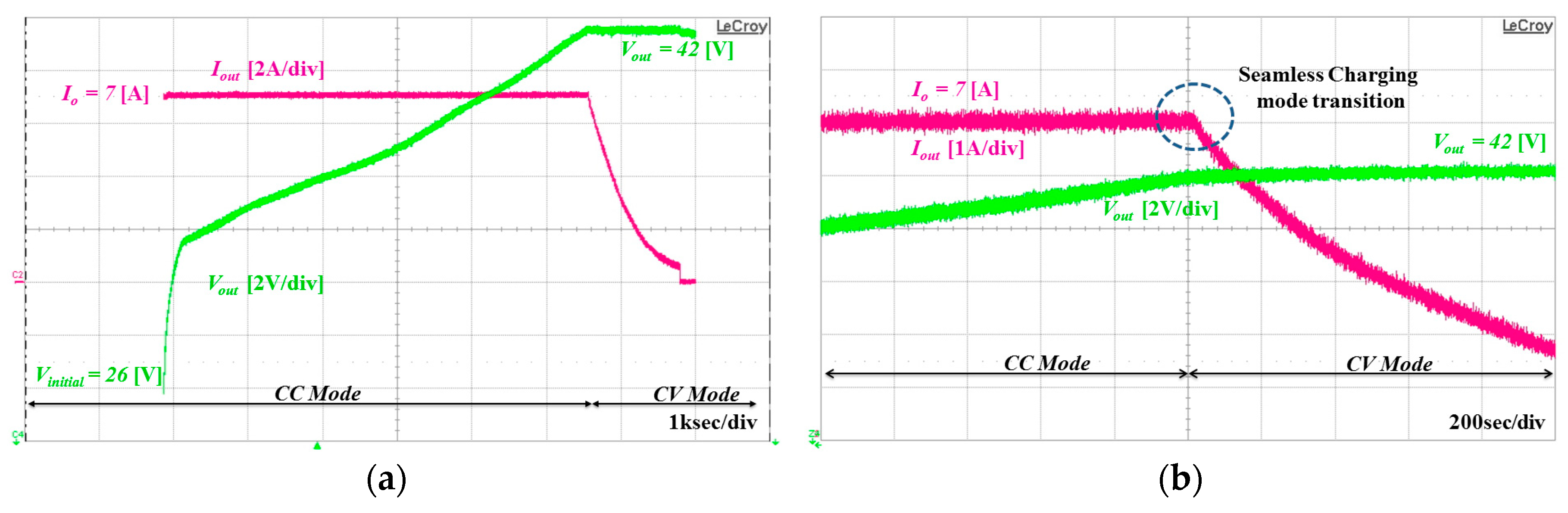
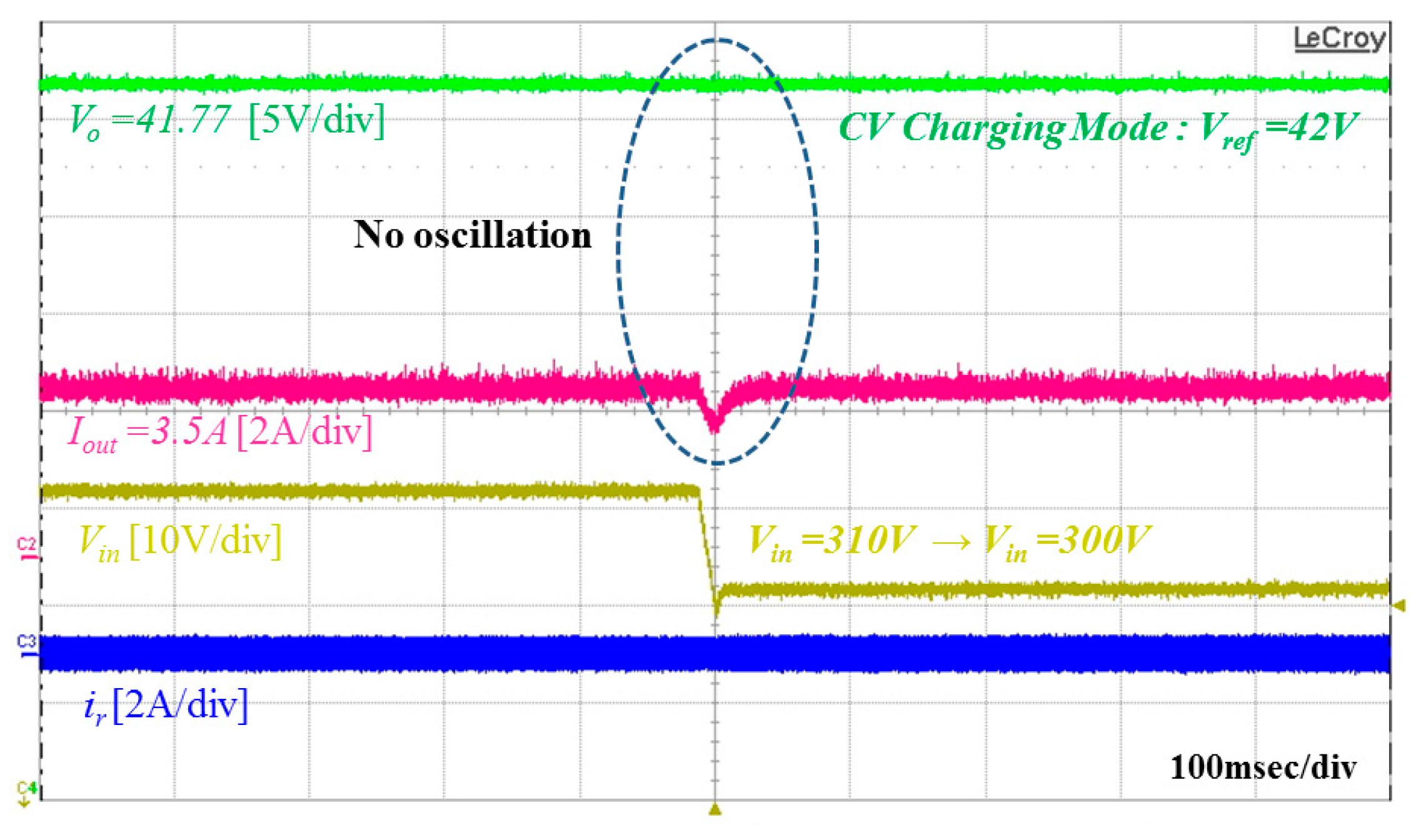
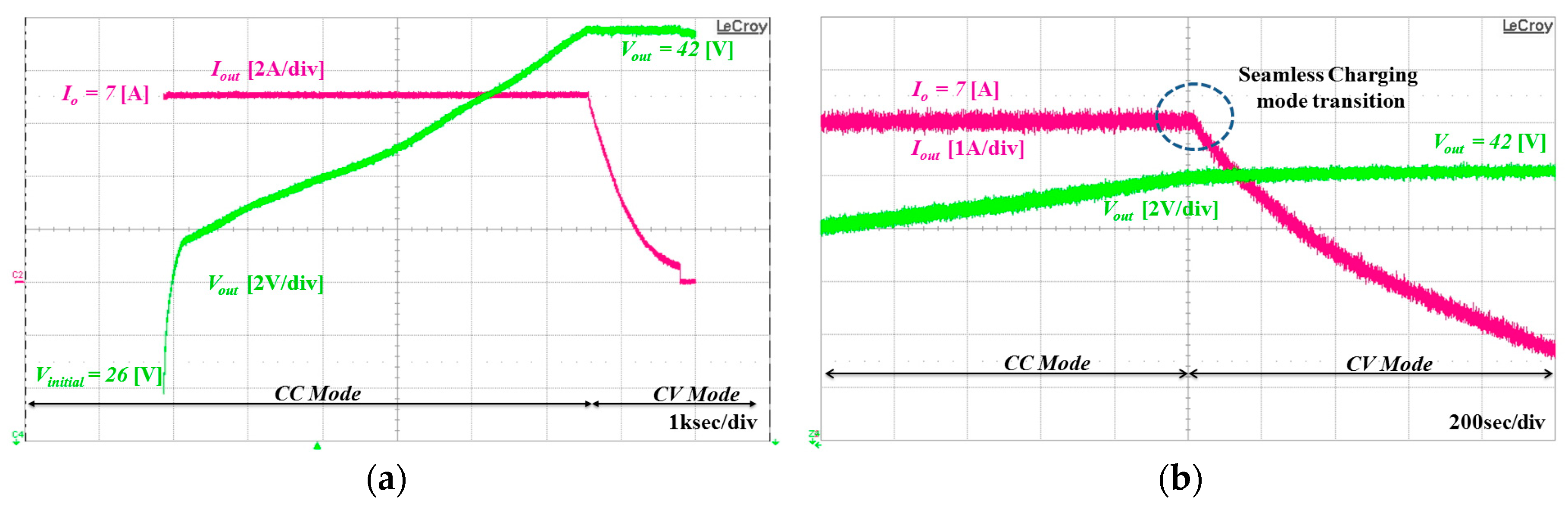
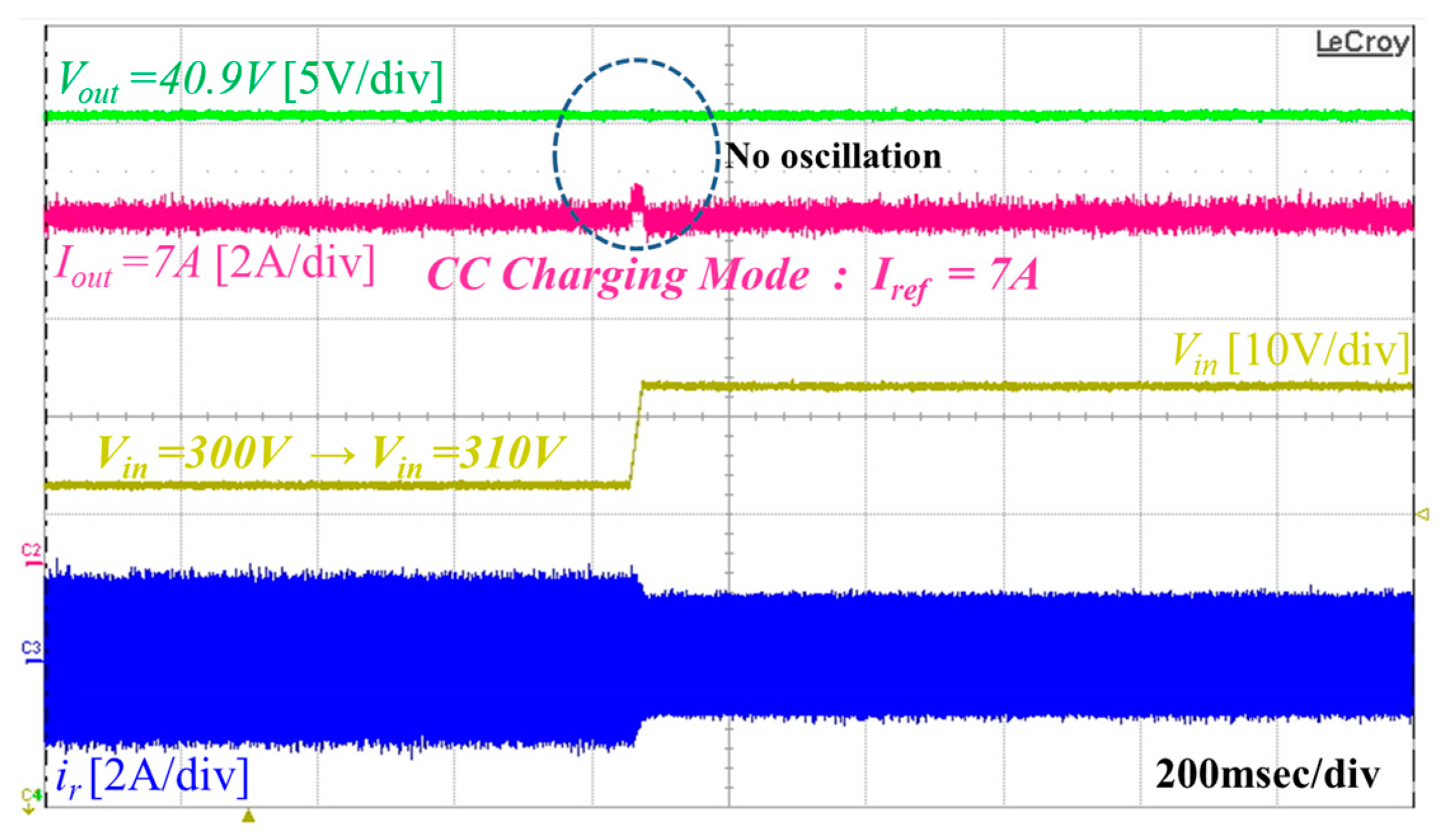
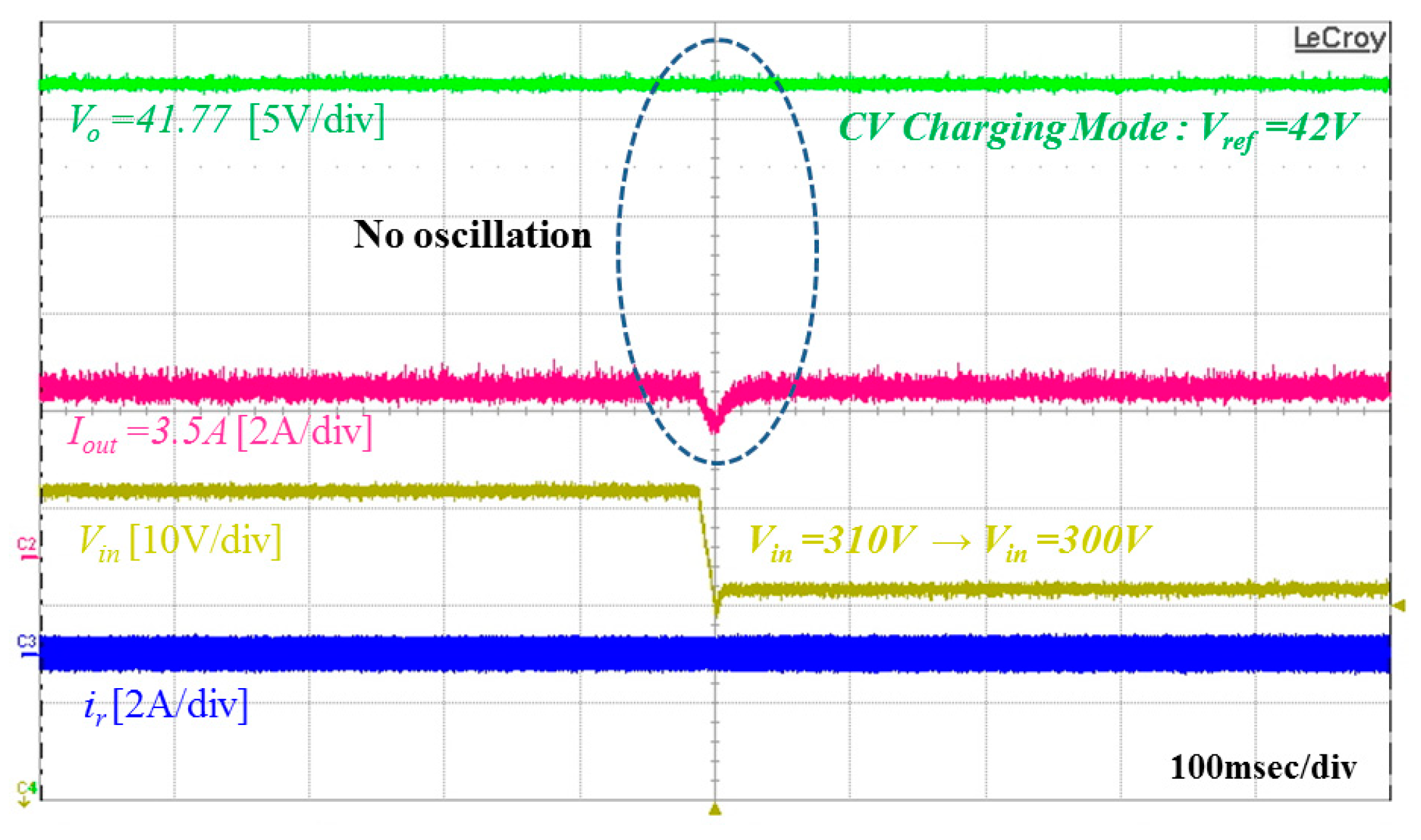
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Horiba, T.; Maeshima, T.; Matsumura, T.; Koseki, M.; Arai, J.; Muranaka, Y. Applications of high power density lithium ion batteries. IEEE Trans. J. Power Sources 2005, 146, 107–110. [Google Scholar] [CrossRef]
- Liu, Y.-H.; Teng, J.-H.; Lin, Y.-C. Search for an optimal rapid charging pattern for lithium-ion batteries using ant colony system algorithm. IEEE Trans. Ind. Electron. 2005, 52, 1328–1336. [Google Scholar] [CrossRef]
- Bo, Y.; Lee, F.C.; Zhang, A.J.; Guisong, H. LLC Resonant Converter for Front End DC/DC Conversion. In Proceedings of the APEC 2002, Dallas, TX, USA, 10–14 March 2002; Volume 2, pp. 1108–1112. [Google Scholar]
- Yang, B. Topology Investigation for Front End DC/DC Power Conversion for Distributed Power System. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2003. [Google Scholar]
- Choi, H. Analysis and Design of LLC Resonant Converter with Integrated Transformer. In Proceedings of the APEC 2007, Anaheim, CA, USA, 25 February–1 March 2007; pp. 1630–1635. [Google Scholar]
- Spiazzi, G.; Buso, S. Effect of a Split Transformer Leakage Inductance in the LLC Converter with Integrated Magnetics. In Proceedings of the COBEP 2013, Gramado, Brazil, 27–31 October 2013; pp. 135–140. [Google Scholar]
- Liu, Y.H.; Luo, Y.F. Search for an optimal rapid-charging pattern for li-ion batteries using the taguchi approach. IEEE Trans. Ind. Electron. 2010, 57, 3963–3971. [Google Scholar] [CrossRef]
- Ali, M.U.; Nengroo, S.H.; Khan, M.A.; Zeb, K.; Kamran, M.A.; Kim, H.-J. A Real-Time Simulink Interfaced Fast-Charging Methodology of Lithium-Ion Batteries under Temperature Feedback with Fuzzy Logic Control. Energies 2018, 11, 1122. [Google Scholar]
- Wang, S.; Liu, Y. A PSO-Based Fuzzy-Controlled Searching for the Optimal Charge Pattern of Li-Ion Batteries. IEEE Trans. Ind. Electron. 2015, 62, 2983–2993. [Google Scholar] [CrossRef]
- Wu, X.; Shi, W.; Du, J. Multi-Objective Optimal Charging Method for Lithium-Ion Batteries. Energies 2017, 11, 1122. [Google Scholar] [CrossRef]
- Chen, L.R. Design of duty-varied voltage pulse charger for improving li-ion battery-charging response. IEEE Trans. Ind. Electron. 2009, 56, 480–487. [Google Scholar] [CrossRef]
- Huang, J.W.; Liu, Y.H.; Wang, S.C.; Yang, Z.Z. Fuzzy-Control-Based Five-Step Li-Ion Battery Charger. In Proceedings of the PEDS 2009, Taipei, Taiwan, 2–5 November 2009; pp. 1547–1551. [Google Scholar]
- Hussein, A.A.-H.; Batarseh, I. A review of charging algorithms for nickel and lithium battery chargers. IEEE Trans. Veh. Technol. 2011, 60, 830–838. [Google Scholar] [CrossRef]
- Hoque, M.M.; Hannan, M.A.; Mohamed, A. Optimal CC-CV Charging of Lithium-Ion Battery for Charge Equalization Controller. In Proceedings of the ICAEES 2016, Putrajaya, Malaysia, 14–16 November 2016; pp. 610–615. [Google Scholar]
- Dow, Y.S.; Son, H.I.; Lee, H.D. A Study on Half Bridge LLC Resonant Converter for Battery Charger on Board. In Proceedings of the IEEE 8th International Conference on Power Electronics and ECCE Asia (ICPE & ECCE) 2011, Jeju, Korea, 30 May–3 June 2011; pp. 2694–2698. [Google Scholar]
- Deng, J.; Li, S.; Hu, S.; Mi, C.C.; Ma, R. Design methodology of LLC resonant converters for electric vehicle battery chargers. IEEE Trans. Veh. Technol. 2014, 63, 1581–1592. [Google Scholar] [CrossRef]
- Musavi, F.; Craciun, M.; Gautam, D.S.; Eberle, W.; Dunford, W.G. An LLC resonant DC-DC converter for wide output voltage range battery charging applications. IEEE Trans. Power Electron. 2013, 28, 5437–5445. [Google Scholar] [CrossRef]
- Choi, Y.J.; Han, H.G.; Choi, S.Y.; Kim, S.I.; Kim, R.Y. A high efficiency LLC resonant converter-based Li-ion battery charger with adaptive turn ratio variable scheme. Trans. KIEE J. Electr. Eng. Technol. 2018, 13, 124–132. [Google Scholar]
- Park, K.H.; Choi, Y.J.; Choi, S.Y.; Kim, R.Y. Design Consideration of CC-CV Controller of LLC Resonant Converter for Li-Ion Battery Charger. In Proceedings of the IFEEC 2015, Taipei, Taiwan, 1–4 November 2015; pp. 1–6. [Google Scholar]
- Jang, J.; Joung, M.; Choi, B.; Hong, S.; Lee, S. Dynamic analysis and control design of optocoupler-isolated LLC series resonant converters with wide input and load variations. IET Trans. Power Electron. 2012, 5, 755–764. [Google Scholar] [CrossRef]
- Jang, J.; Joung, M.; Choi, S.; Choi, Y.; Choi, B. Current Mode Control for LLC Series Resonant dc-to-dc Converters. In Proceedings of the APEC 2011, Fort Worth, TX, USA, 6–11 March 2011; pp. 21–27. [Google Scholar]
- Jang, J.; Joung, M.; Choi, B.; Kim, H.G. Dynamic Analysis and Control Design of Optocoupler-Isolated LLC Series Resonant Converters with Wide Input and Load Variations. In Proceedings of the ECCE 2009, San Jose, CA, USA, 20–24 September 2009; pp. 758–765. [Google Scholar]
- Choi, Y.J.; Choi, S.Y.; Kim, R.Y. An Integrated Voltage-current Compensator of LLC Resonant Converter for Li-ion Battery Charger Applications. In Proceedings of the IPEMC-ECCE Asia 2016, Hefei, China, 22–26 May 2016; pp. 3783–3790. [Google Scholar]
- Yang, S.H.; Liu, J.W.; Wang, C.C. A single-chip 60-V bulk charger for series Li-ion batteries with smooth charge-mode transition. IEEE Trans. Circuits Syst. I Regul. Pap. 2012, 59, 1588–1597. [Google Scholar] [CrossRef]
- Chen, M.; Rincon-Mora, G.A. Accurate, compact, and power-efficient Li-ion battery charger circuit. IEEE Trans. Circuits Syst. II Express Briefs 2006, 53, 1180–1184. [Google Scholar] [CrossRef]
- FairChild. AN-4151: Half-Bridge LLC Resonant Converter Design Using FSFR-Series Fairchild Power Switch; FairChild: Sunnyvale, CA, USA, 2014. [Google Scholar]
- Chang, C.H.; Chang, E.C.; Cheng, C.A.; Cheng, H.L.; Lin, S.C. Small Signal Modeling of LLC Resonant Converters Based on Extended Describing Function. In Proceedings of the 2012 International Symposium on Computer, Consumer and Control (IS3C), Taichung, Taiwan, 4–6 June 2012; pp. 365–368. [Google Scholar]
- Yang, E.X.; Lee, F.C.; Jovanovic, M.M. Small-Signal Modeling of Series and Parallel Resonant Converters. In Proceedings of the APEC 1992, Boston, MA, USA, 23–27 February 1992; pp. 785–792. [Google Scholar]
- Microchips. AN1477: Digital Compensator Design for LLC Resonant Converter; Microchips: Chandler, AZ, USA, 2012. [Google Scholar]
- Yang, E.X.Q. Extended Describing Function Method For Small-Signal Modeling of Resonant and Multi-Resonant Converters. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, February 2014. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Designator | Value (Unit) |
|---|---|
| Nominal Input Voltage (Vin) | 310 (V) |
| Resonant Frequency (fo) | 110 (kHz) |
| Output Voltage Range (Vout) | 25–42 (V) |
| Transformer Turn Ratio (n) | 6.5 |
| Quality Factor (Q) | 0.25 |
| Magnetizing Inductance (Lm) | 391 (uH) |
| Resonant Inductor (Lr) | 78 (uH) |
| Resonant Capacitor (Cr) | 27 (nF) |
| Output Capacitor (C) | 30 (uF) |
| ESR of Resonant Current Path (rs) | 500 (mΩ) |
| ESR of Output Capacitor (rc) | 15 (mΩ) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, Y.-J.; Cha, H.-R.; Jung, S.-M.; Kim, R.-Y. An Integrated Current-Voltage Compensator Design Method for Stable Constant Voltage and Current Source Operation of LLC Resonant Converters. Energies 2018, 11, 1325. https://doi.org/10.3390/en11061325
Choi Y-J, Cha H-R, Jung S-M, Kim R-Y. An Integrated Current-Voltage Compensator Design Method for Stable Constant Voltage and Current Source Operation of LLC Resonant Converters. Energies. 2018; 11(6):1325. https://doi.org/10.3390/en11061325
Chicago/Turabian StyleChoi, Yeong-Jun, Hwa-Rang Cha, Sang-Min Jung, and Rae-Young Kim. 2018. "An Integrated Current-Voltage Compensator Design Method for Stable Constant Voltage and Current Source Operation of LLC Resonant Converters" Energies 11, no. 6: 1325. https://doi.org/10.3390/en11061325