Dynamic Modeling and Simulation on a Hybrid Power System for Electric Vehicle Applications

Abstract
:1. Introduction
2. Dynamic Modeling for Hybrid Power System
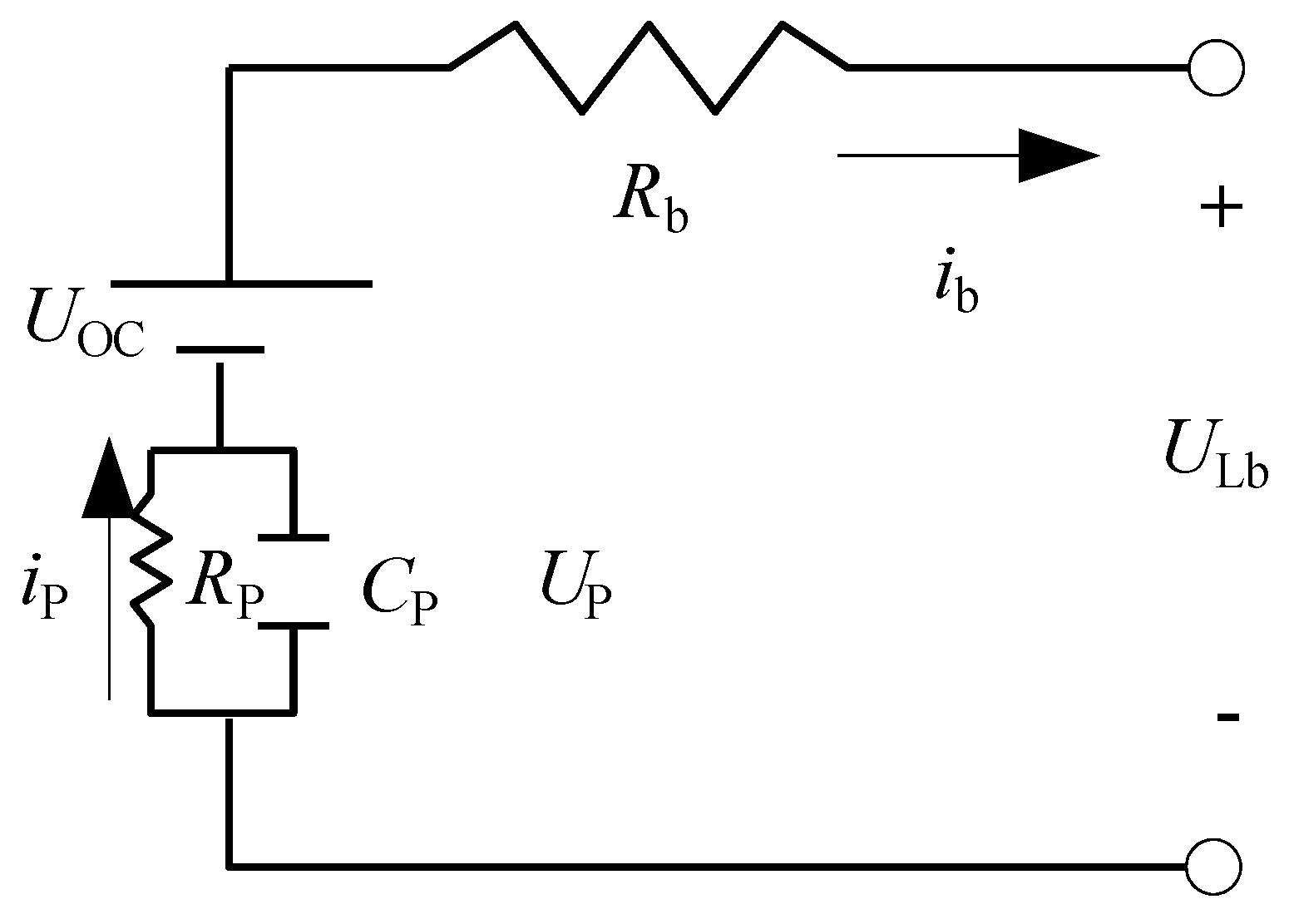
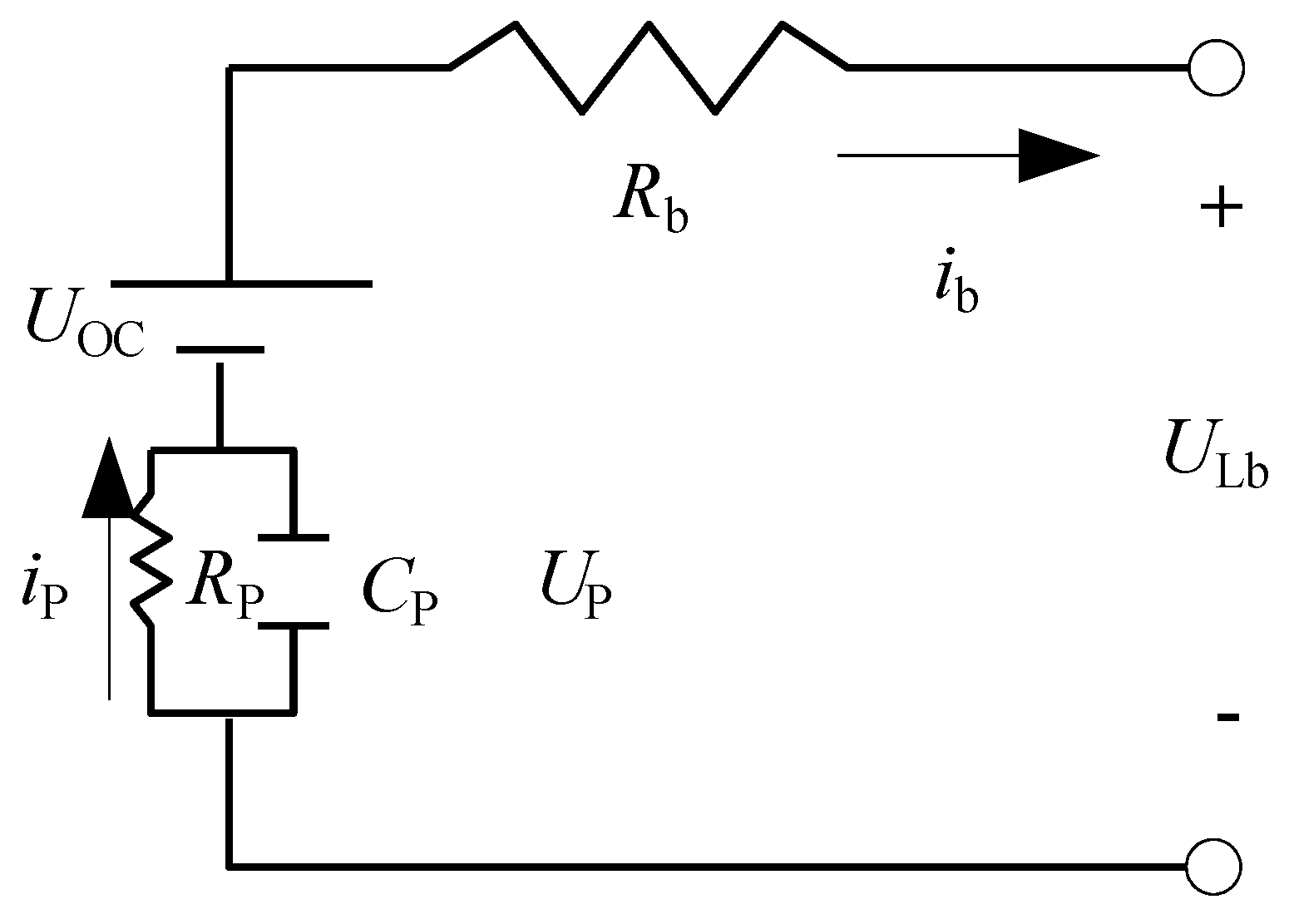
2.1. Dynamic Model of the Battery

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SoC/% | UOC/V | CP/F | RP/(mΩ) | Rb/(mΩ) |
|---|---|---|---|---|
| 100 | 66.504 | 657.89 | 6.84 | 24.08 |
| 90 | 65.252 | 429.58 | 7.15 | 23.95 |
| 80 | 64.810 | 502.51 | 7.96 | 24.03 |
| 70 | 64.247 | 666.67 | 7.50 | 24.06 |
| 60 | 63.799 | 691.56 | 7.23 | 24.21 |
| 50 | 63.302 | 683.23 | 8.05 | 24.26 |
| 40 | 62.679 | 511.36 | 8.88 | 24.53 |
| 30 | 61.832 | 725.51 | 8.27 | 24.54 |
| 20 | 61.160 | 862.07 | 9.28 | 24.66 |
| 10 | 60.125 | 760.65 | 9.86 | 24.80 |
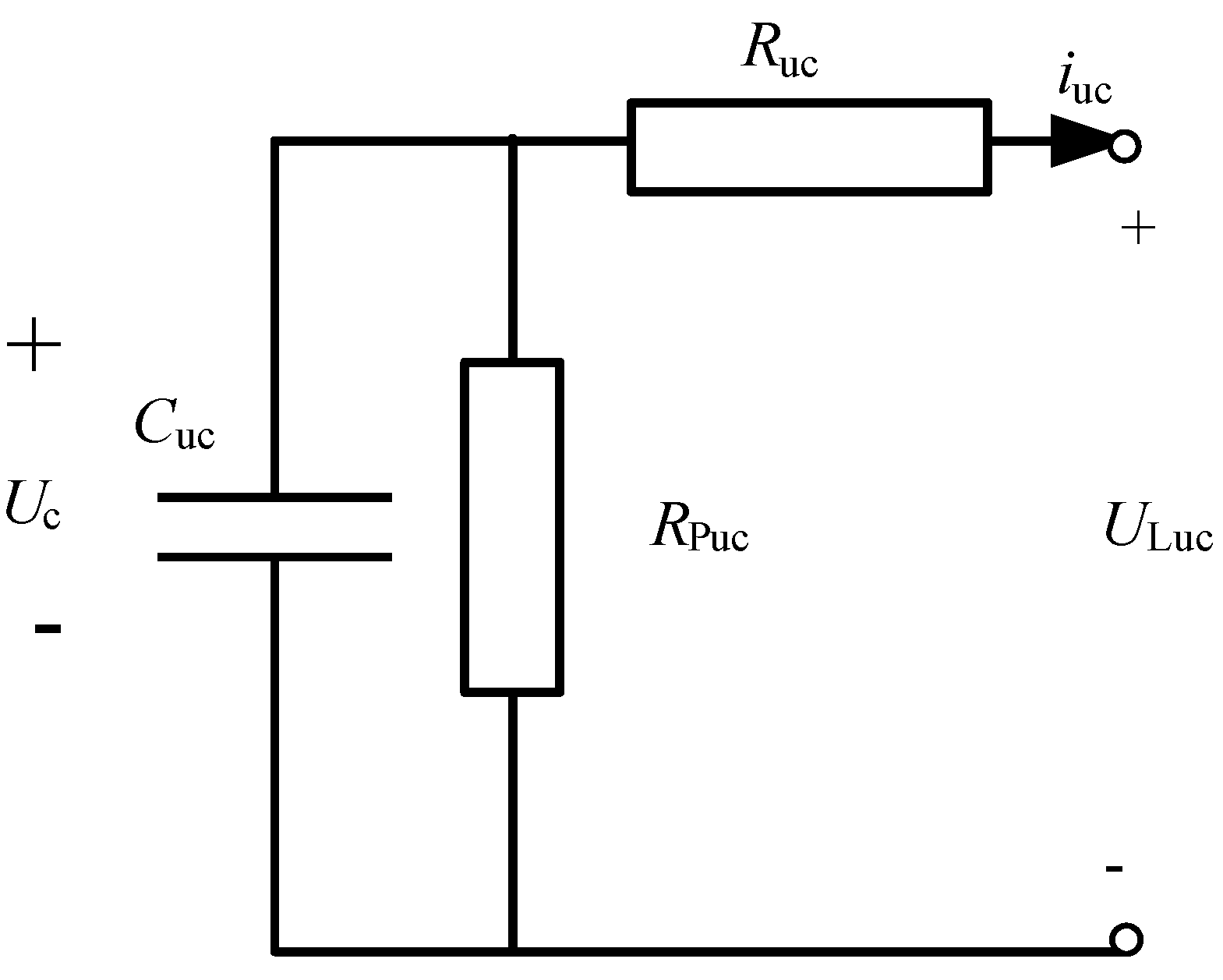
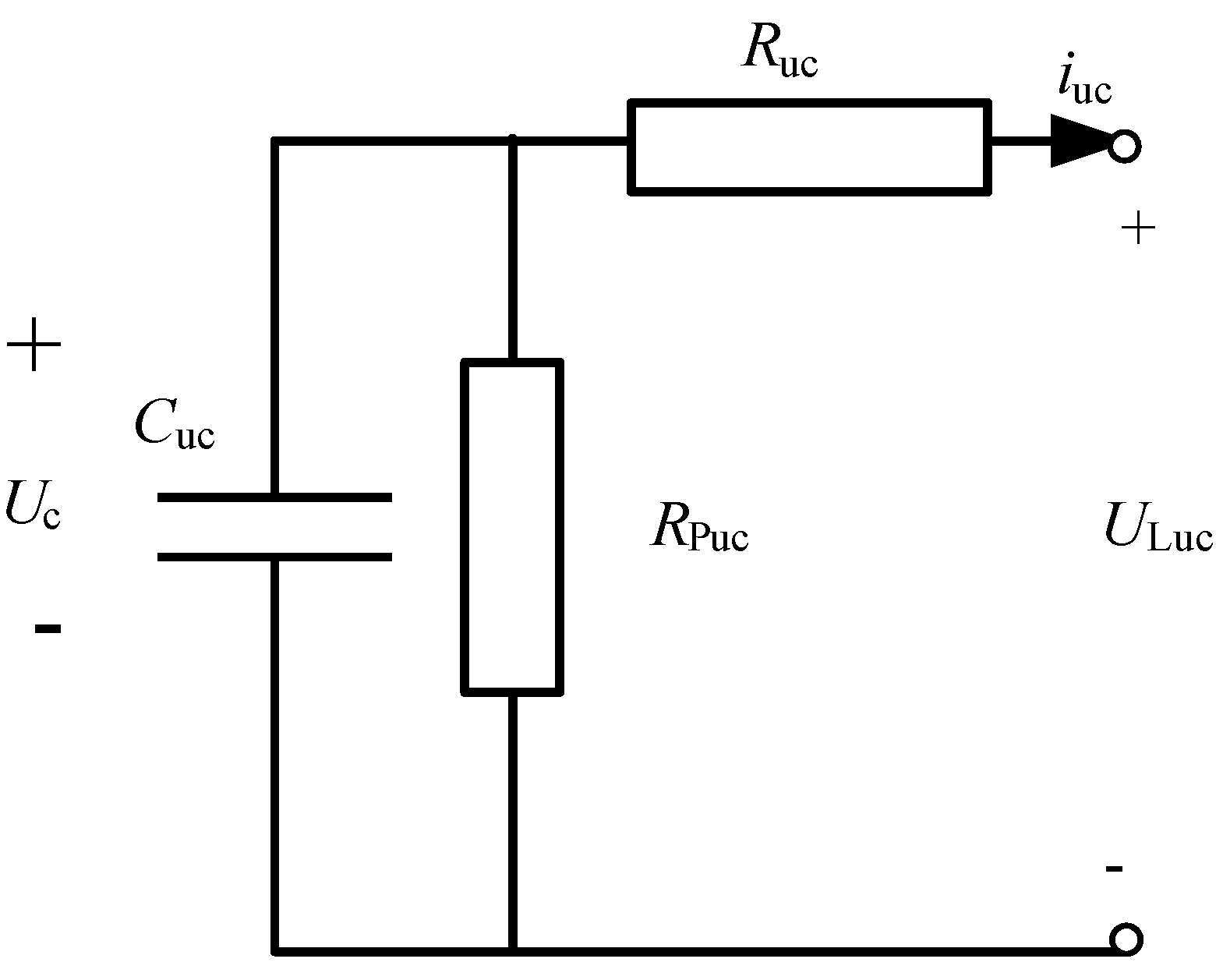
2.2. Dynamic Model of the Ultracapacitor
| iuc/A | −2.22 | −20 | −50 | −100 | −150 | −200 |
| Ruc/(mΩ) | 2.41 | 2.14 | 1.96 | 1.94 | 1.84 | 1.83 |
| iuc/A | 2.22 | 20 | 50 | 100 | 150 | 200 |
| Ruc/(mΩ) | 2.36 | 2.01 | 1.96 | 1.8 | 176 | 1.75 |
| iuc/A | 20 | 50 | 100 | 150 | 200 |
| Cuc/F | 471.1 | 468.9 | 469 | 467.3 | 465.2 |
| iuc/A | −20 | −50 | −100 | −150 | −200 |
| Cuc/F | 486.7 | 487.7 | 487.1 | 488.4 | 486.6 |
| Discharging | Charging | |
|---|---|---|
| RPuc/Ω | 12.43 | 1.11 |
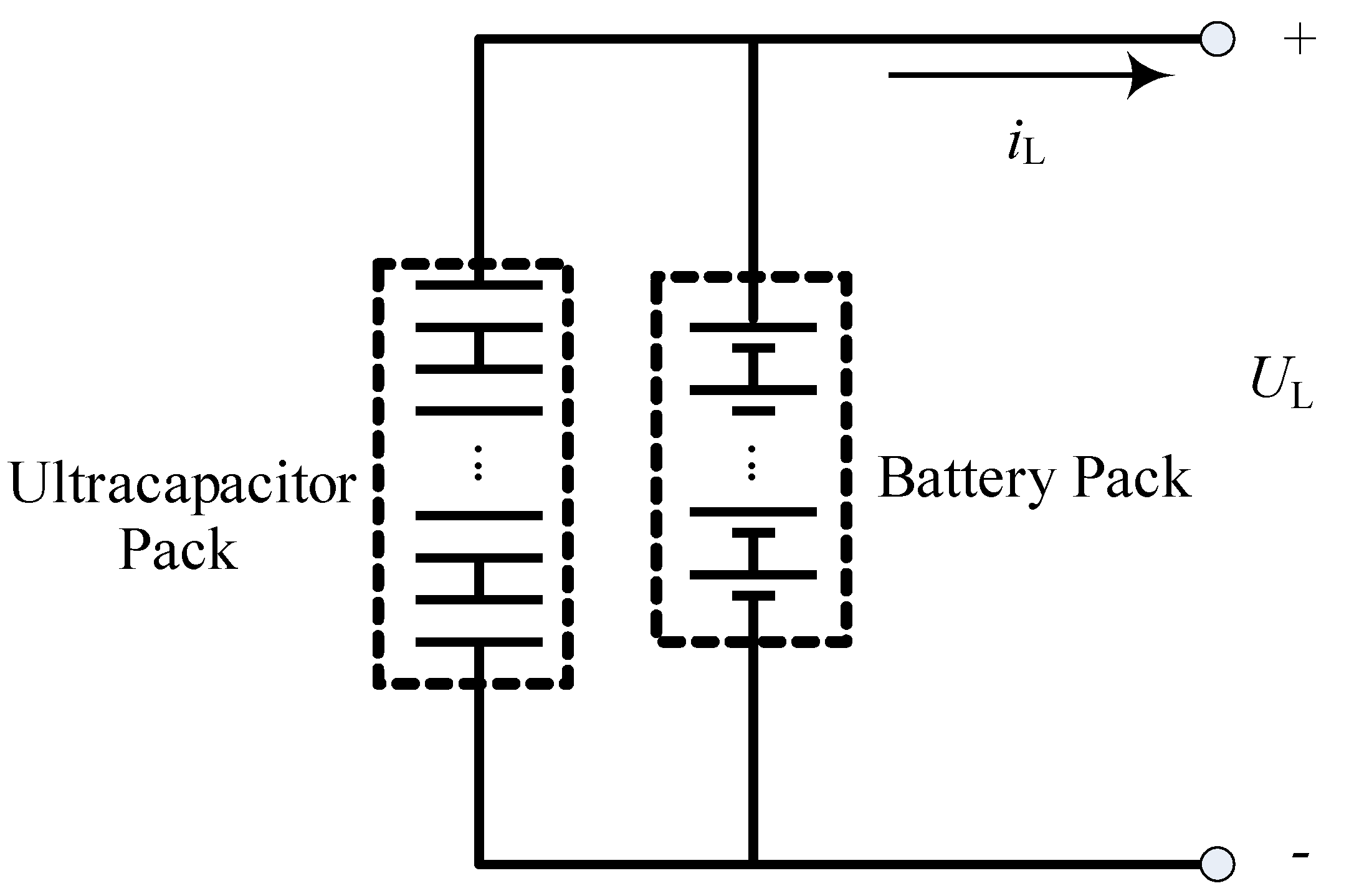
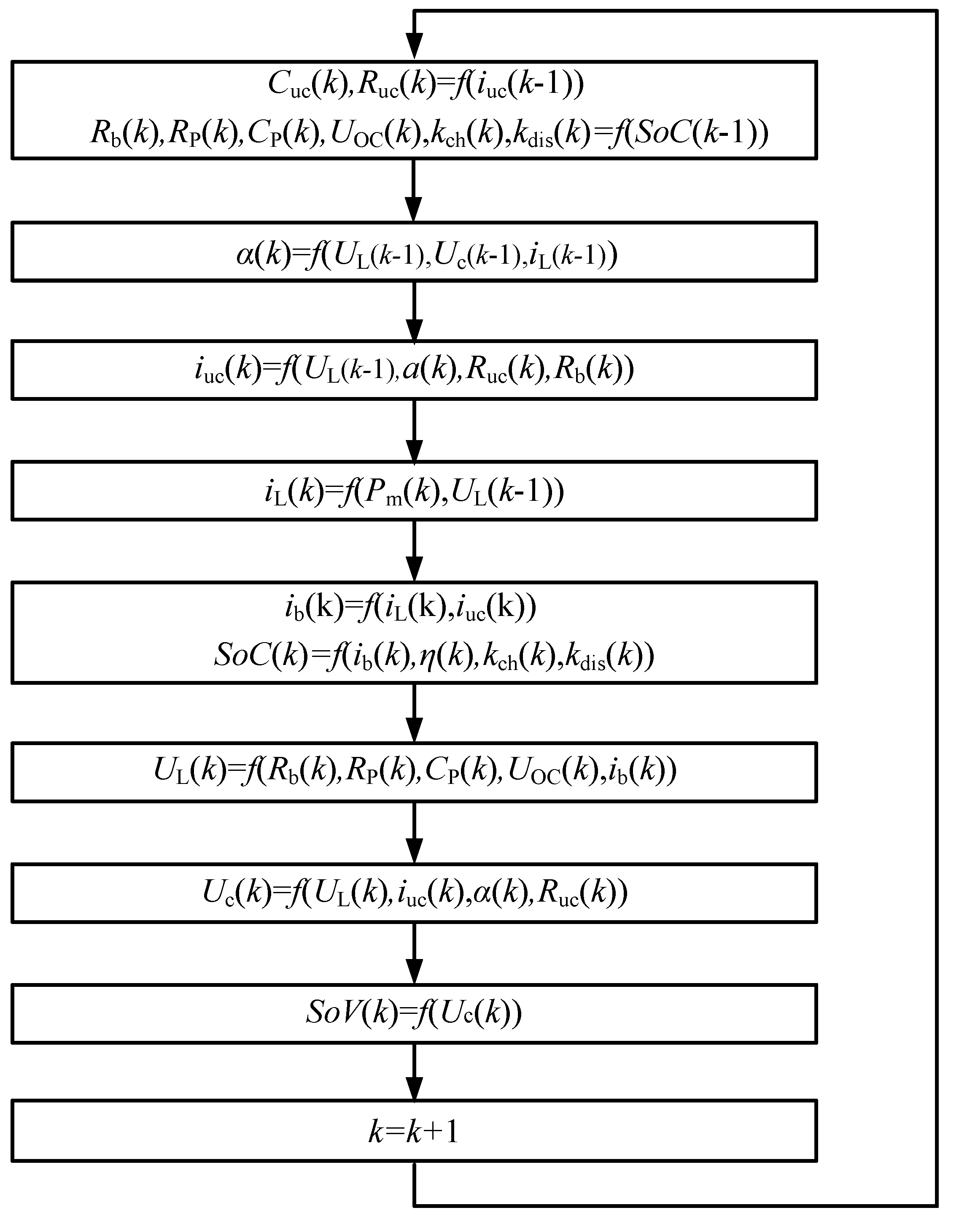
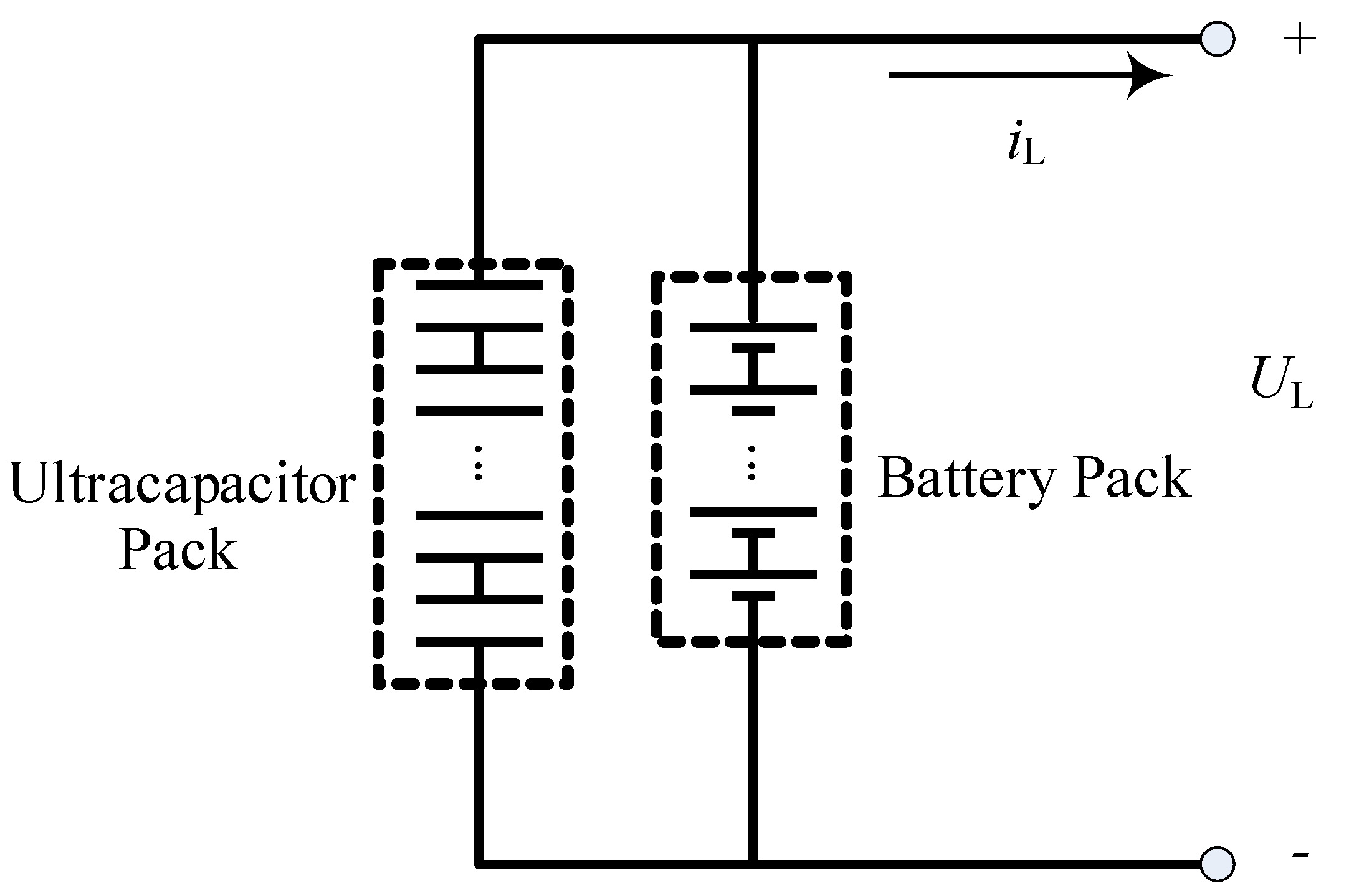
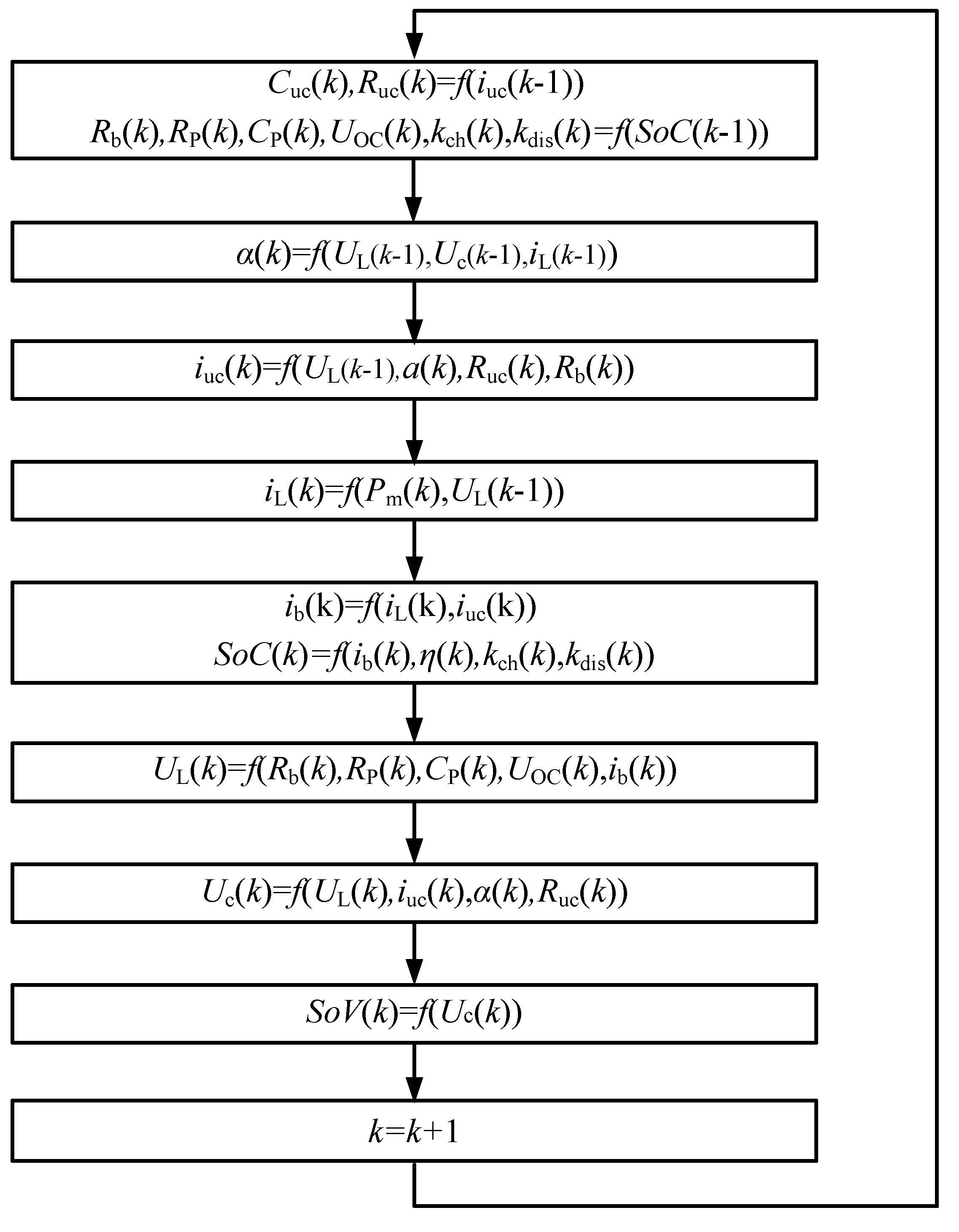
2.3. Dynamic Model of the Hybrid Power System
3. Simulation Experiments
| Vehicle | |
| Curb mass/kg | 1320 |
| Full load/kg | 1845 |
| Frontal area/m2 | 2.53 |
| Air resistance coefficient | 0.36 |
| Rolling radius/m | 0.299 |
| Hybrid Power System | |
| Battery type | lithium-ion battery |
| Nominal cell voltage/V | 3.6 |
| Nominal cell capacity/Ah | 30 |
| Number of cells/Nbat | 88 |
| Ultracapacitor | BMOD0500-16.2 V |
| Nominal module voltage/V | 16 |
| Nominal module capacity/F | 500 |
| Number of modules/Nuc | 21 |
| Battery Only Power System | |
| Battery type | lithium-ion battery |
| Nominal cell voltage/V | 3.6 |
| Nominal cell capacity/Ah | 30 |
| Number of cells/Nbat | 88 |

| Battery Pack Number of Cells | Ultracapacitor Pack Number of Modules | ΔSoC/% | ΔSoV/% | SoC Consumption Saving/% | Electricity Saving/% |
|---|---|---|---|---|---|
| 86 | 21 | −13.7 | −12.8 | 1.89 | 6.97 |
| 87 | 21 | −13.2 | −9.90 | 1.87 | 7.12 |
| 88 | 21 | −12.5 | −2.80 | 2.00 | 7.78 |
| 89 | 21 | −13.9 | −0.20 | 0.38 | 6.51 |
| 90 | 21 | −14.1 | −0.01 | 0.47 | 4.56 |
4. Conclusions
- (1)
- Combining high-energy-density batteries and high-power-density ultracapacitors for application in EVs can exploit the advantages of both of them and improve the performance of the power system;
- (2)
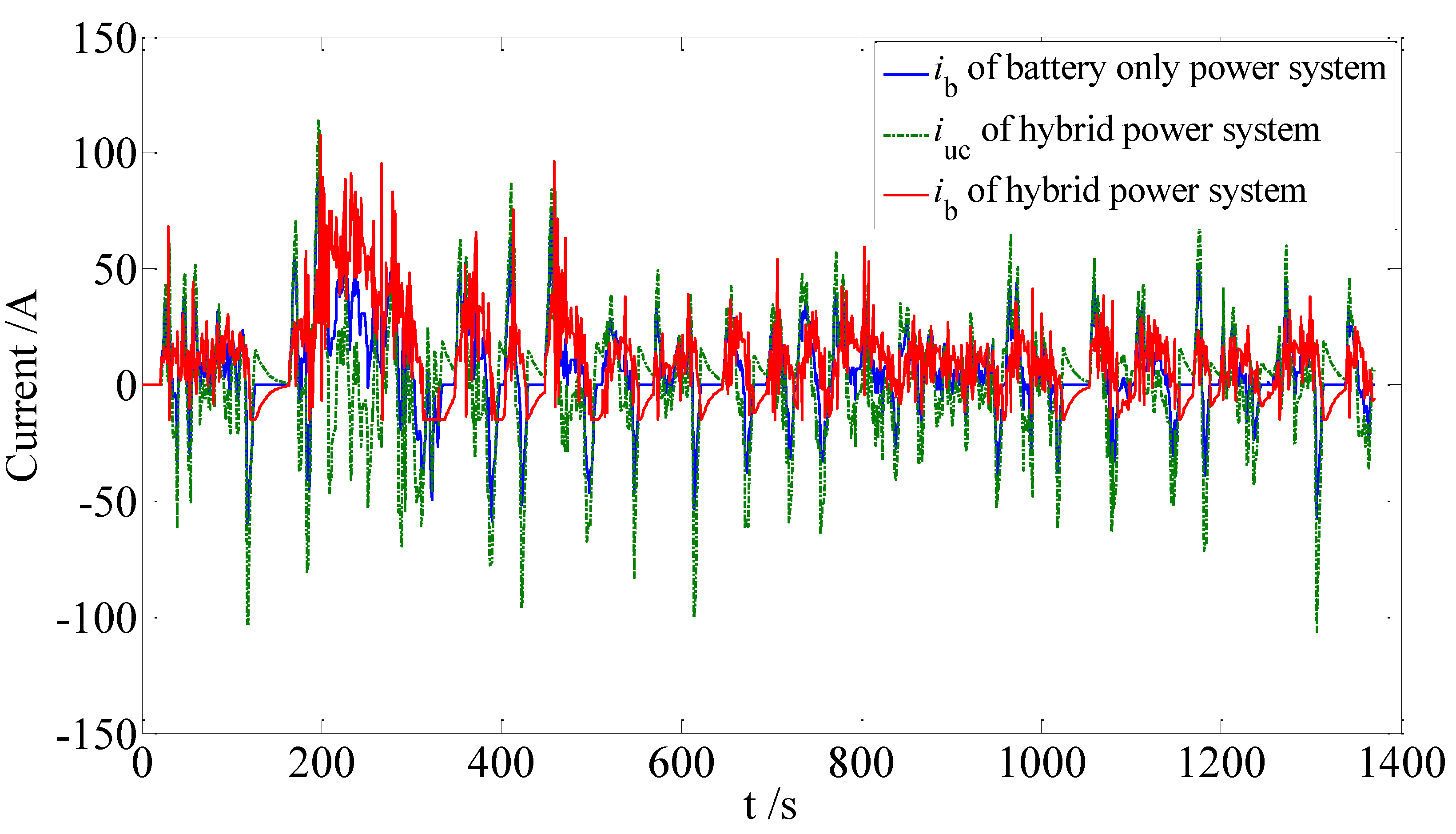
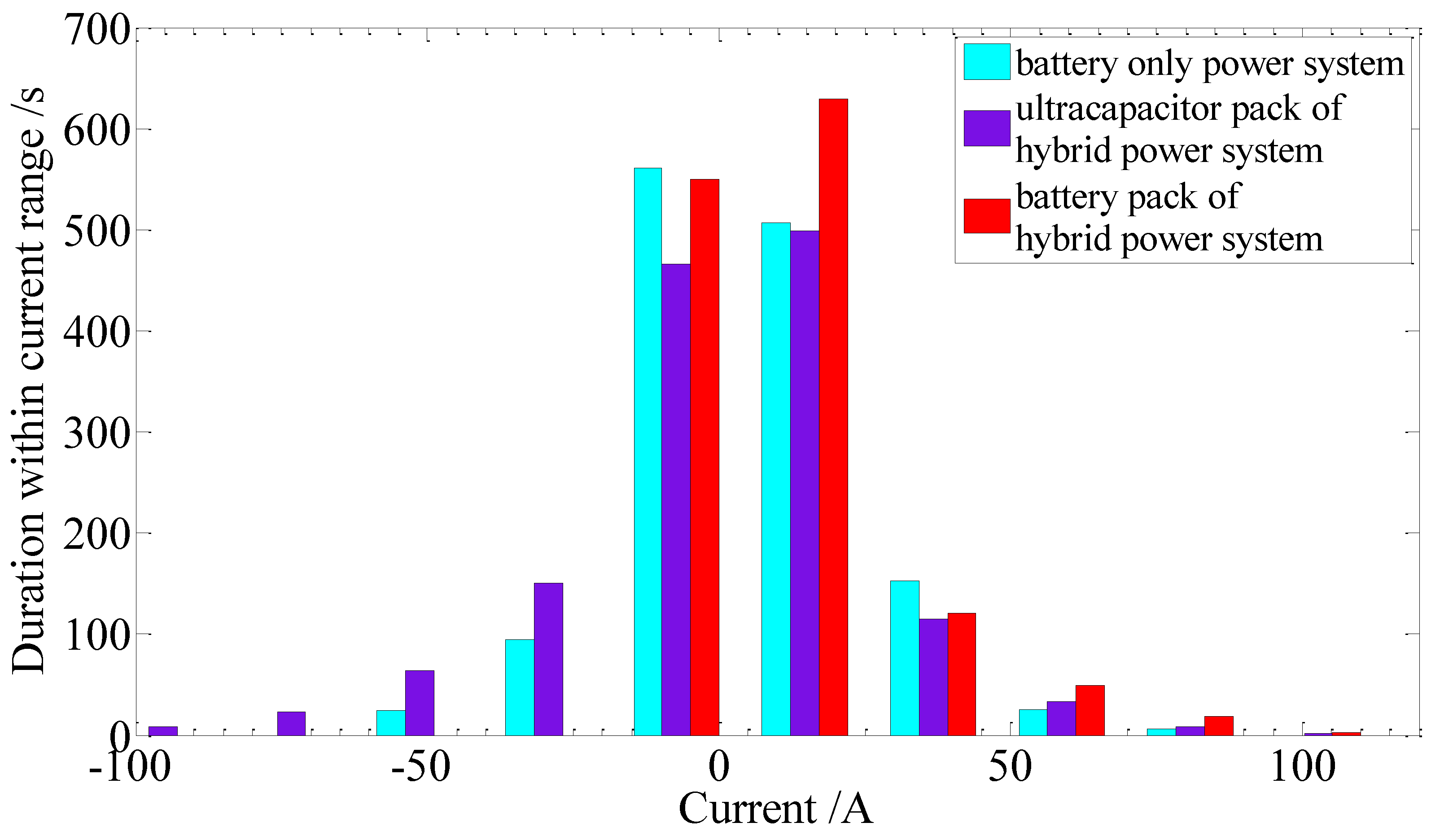
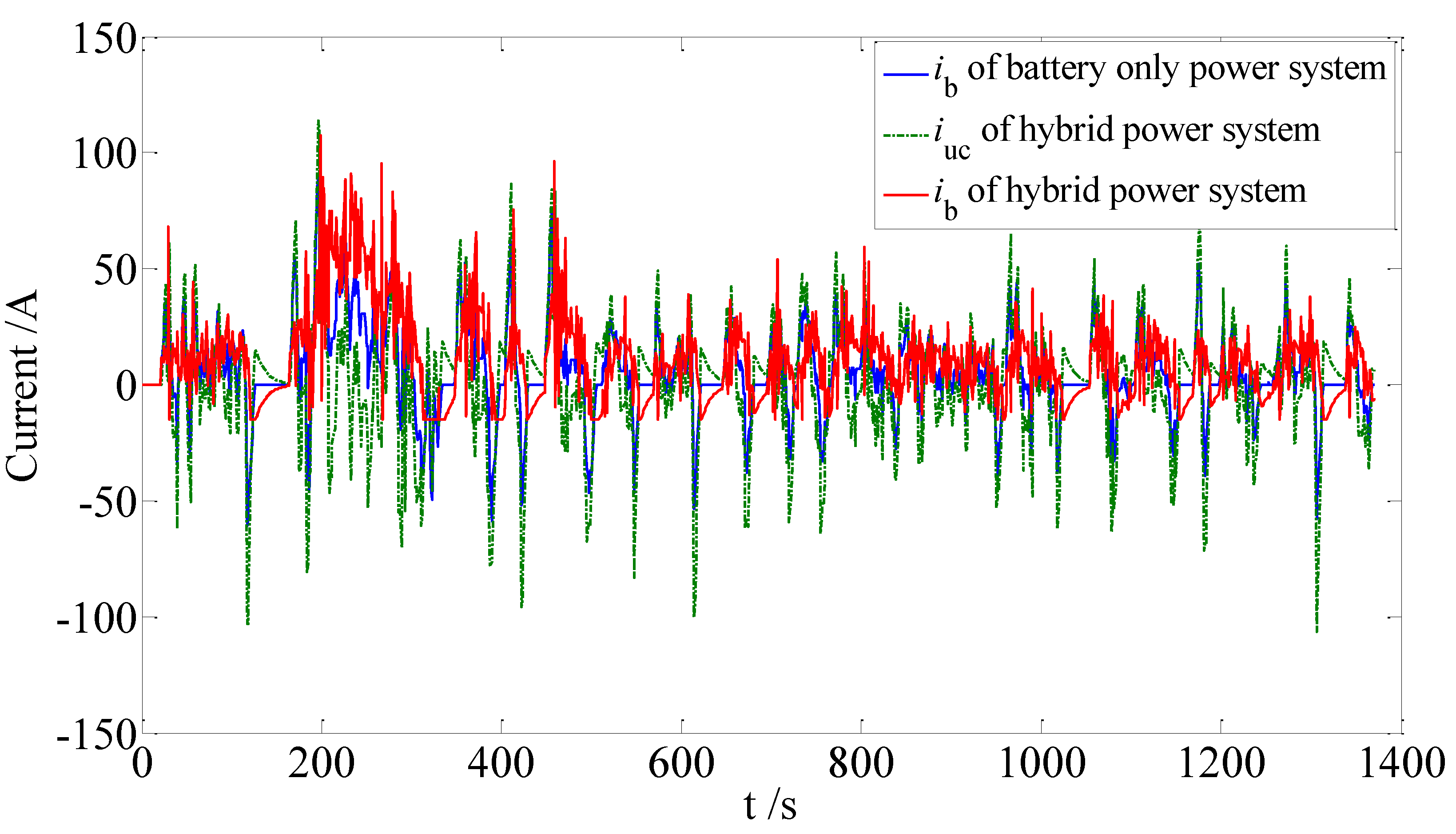
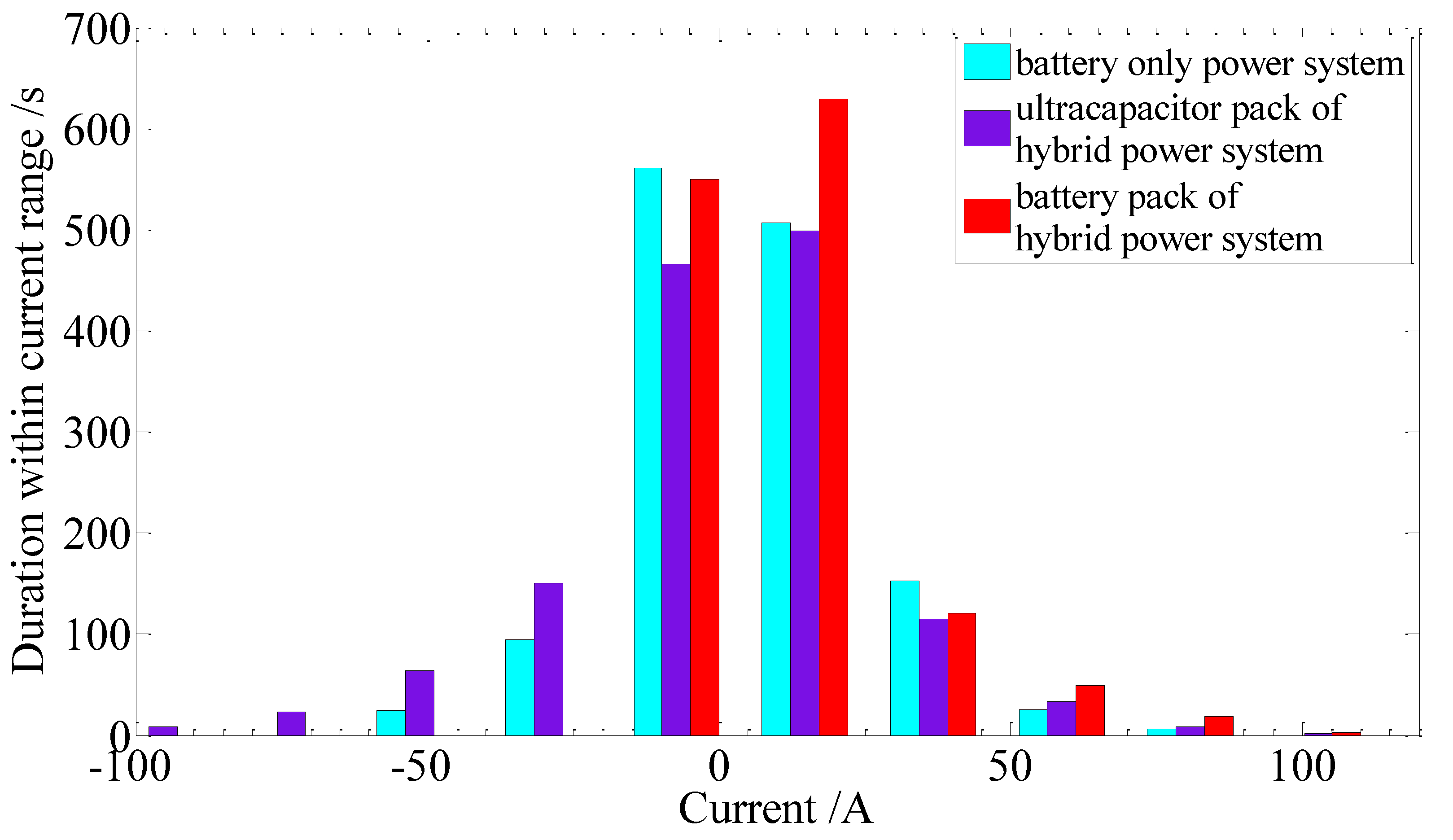
- For the hybrid power system, the impact of a big current on the battery pack is avoided. Its charging current is much lower than in the battery only power system, which will be very helpful to increase the cycle life of the battery for smooth working conditions;
- (3)
- Compared with a battery only power system, the SoC consumption of the battery pack in a hybrid power system is decreased by 2% and electricity savings of 7.78% are achieved;
- (4)
- Reasonable matching of the parameters of the passive hybrid power system is necessary to get a higher performance. It is verified that the maximum voltage of the ultracapacitor pack should be designed to be equal to the open-circuit voltage of battery pack at SoC = 90%.
Acknowledgements
References
- He, H.; Yan, S.; Xiao, Z. Integrated control method for a fuel cell hybrid system. Asia-Pac. J. Chem. Eng. 2009, 4, 68–72. [Google Scholar] [CrossRef]
- Kisacikoglu, M.; Uzunoglu, M.; Alam, M. Load sharing using fuzzy logic control in a fuel cell/ultracapacitor hybrid vehicle. Int. J. Hydrogen Energy 2009, 34, 1497–1507. [Google Scholar] [CrossRef]
- Nelson, R. Power requirements for batteries in hybrid electric vehicles. J. Power Sources 2000, 91, 2–26. [Google Scholar] [CrossRef]
- Xiong, R.; He, H.; Wang, Y.; Zhang, X. Study on ultracapacitor-battery hybrid power system for PHEV applications. High Technol. Lett. 2010, 16, 23–28. [Google Scholar]
- Cheng, D.L.; Wismer, M.G. Active Control of Power Sharing in a Battery/Ultracapacitor Hybrid Source. In Proceedings of 2nd IEEE Conference on Industrial Electronics and Applications, Harbin, China, May 2007; pp. 2913–2918.
- Henson, W. Optimal battery/ultracapacitor storage combination. J. Power Sources 2008, 179, 417–423. [Google Scholar] [CrossRef]
- Ozatay, E.; Zile, B.; Anstrom, J.; Brennan, S. Power distribution control coordinating ultracapacitors and batteries for electric vehicles. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, June 2004; pp. 4716–4721.
- Camara, M.; Gualous, H.; Gustin, F.; Berthon, A. Design and New Control of DC/DC Converters to Share Energy Between Supercapacitors and Batteries in Hybrid Vehicles. IEEE Trans. Veh. Tech. 2008, 57, 2721–2735. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, C.; Sharkh, S. Estimation of Real-Time Peak Power Capability of a Traction Battery Pack Used in an HEV. In Proceedings of Asia-Pacific Power and Energy Engineering Conference (APPEEC), Chengdu, China, March 2010; pp. 1–6.
- Idaho National Engineering & Environmental Laboratory. Freedom CAR Battery Test Manual for Power-Assist Hybrid Electric Vehicles; Assistant Secretary for Energy Efficiency and Renewable Energy (EE) Idaho Operations Office: Idaho Falls, ID, USA, 2003. [Google Scholar]
- Elghaoui, L.; Lebret, H. Robust solutions to least-squares problems with uncertain data. SIAM J. Matrix Anal. Appl. 1997, 18, 1035–1064. [Google Scholar] [CrossRef]
- Nelms, R.M.; Cahela, D.R.; Tatarchuk, B.J. Modeling Double-Layer Capacitor Behavior Using Ladder Circuits. IEEE Trans. Aero. Electron. 2003, 39, 430–438. [Google Scholar] [CrossRef]
- Xiong, R.; He, H.; Zhang, X.; Wang, Y. Simulation study on hybrid ultracapactior-battery power system for PHEV. In Proceedings of IEEE The 2010 International Conference on Future Computer and Communication (ICFCC 2010), Wuhan, China, May 2010; pp. 496–500.
© 2010 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
He, H.-W.; Xiong, R.; Chang, Y.-H. Dynamic Modeling and Simulation on a Hybrid Power System for Electric Vehicle Applications. Energies 2010, 3, 1821-1830. https://doi.org/10.3390/en3111821
He H-W, Xiong R, Chang Y-H. Dynamic Modeling and Simulation on a Hybrid Power System for Electric Vehicle Applications. Energies. 2010; 3(11):1821-1830. https://doi.org/10.3390/en3111821
Chicago/Turabian StyleHe, Hong-Wen, Rui Xiong, and Yu-Hua Chang. 2010. "Dynamic Modeling and Simulation on a Hybrid Power System for Electric Vehicle Applications" Energies 3, no. 11: 1821-1830. https://doi.org/10.3390/en3111821