Intelligent Stability Design of Large Underground Hydraulic Caverns: Chinese Method and Practice

Abstract
:1. Introduction
2. Basic Theory of Chinese ISD
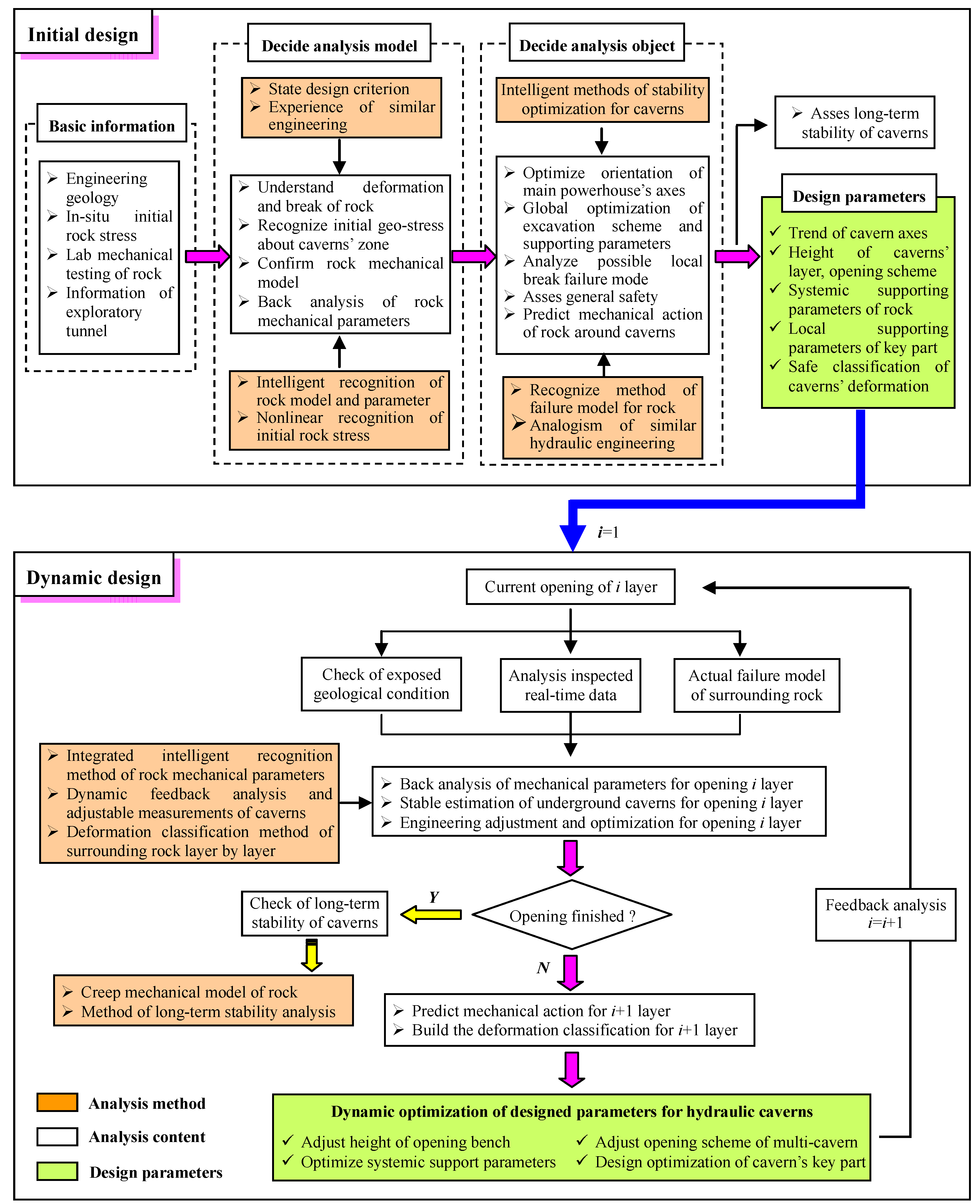
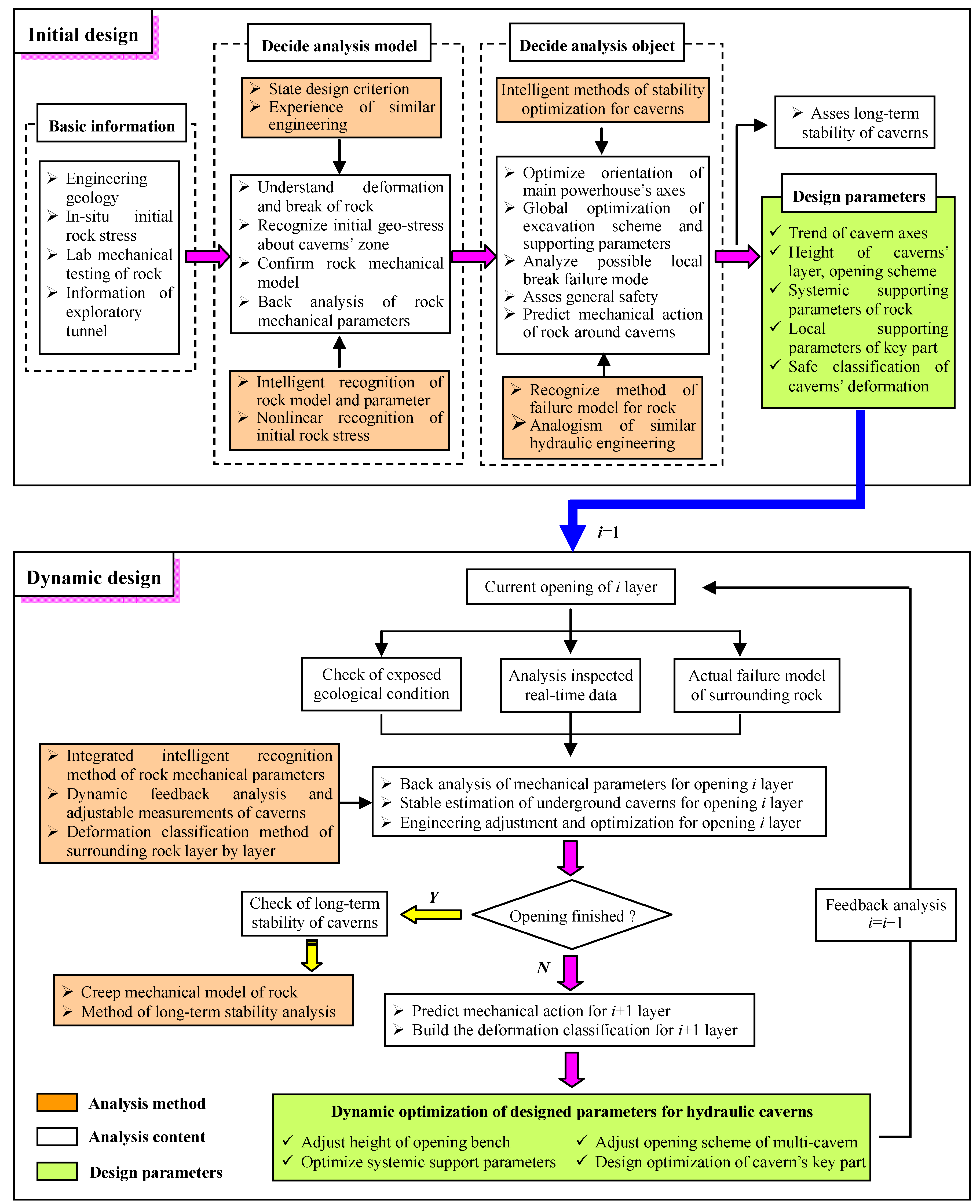
2.1. Flowchart of ISD in a Large Cavern
- (1)
- Understand the geology background of the engineering field by the way of geological investigation, including strata, fault, lithology, terrain, etc.
- (2)
- Carry out measurement of rock stress and calculate the 3D stress field of the engineering zone by nonlinear intelligent back analysis considering the tectonic history and current physiognomy of the engineering region [19].
- (3)
- Discover the mechanism of deformation and failure of surrounding rock by systemic laboratory experiments, such as uniaxial compression tests, general triaxial compressive tests, triaxial loading and unloading tests, real triaxial compressive tests, and by in-situ observation and exploration, such as deformation inspections, rock AE inspections, and elastic wave testing in experimental or exploratory tunnels for the caverns.
- (4)
- Recognize the constitutive model, failure criteria and mechanical parameters of surrounding rock using intelligent algorithms. For example, the mechanical model and parameters, which consider the damage accumulation induced by openings in large caverns, can be identified by an intelligent algorithm based on experimental data from the laboratory or an in-situ tunnel [20].
- (5)
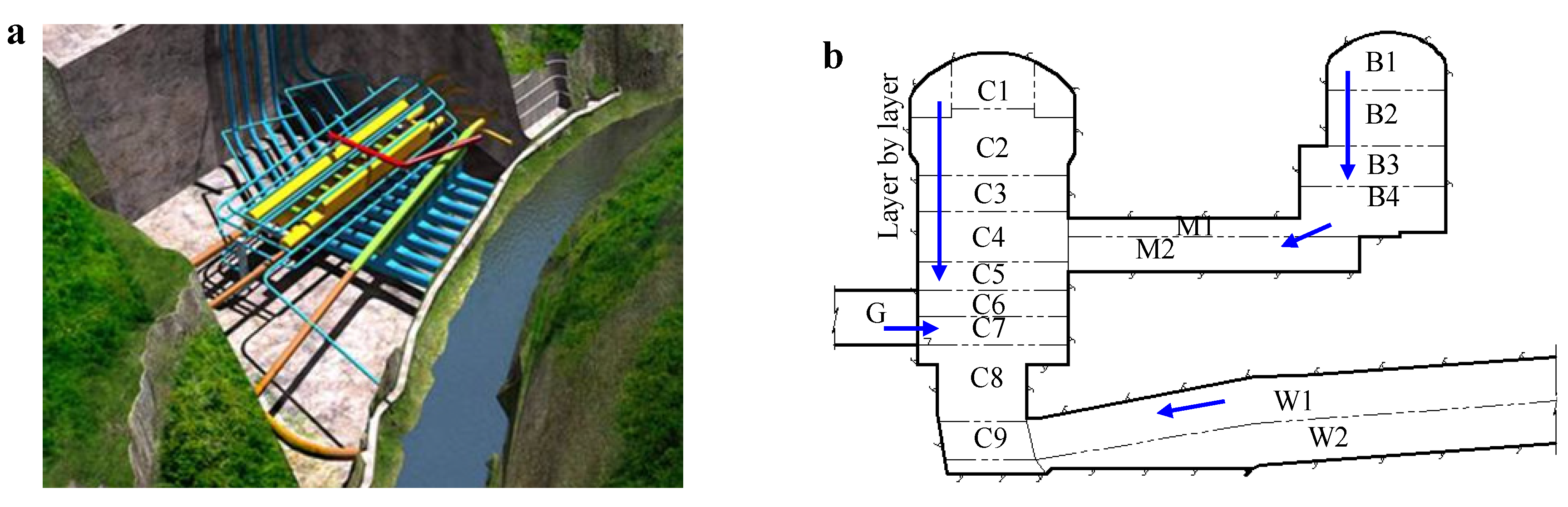
- Optimize the excavation scheme, the height of each excavated layer, the excavation scheme of key parts, reasonable supporting forms and supporting parameters using a globally intelligent excavation and supporting optimization method for large caverns [21].
- (6)
- Build up failure patterns of the surrounding rock for large underground caverns and distinguish the potential failure pattern of rock in objective caverns.
- (7)
- (8)
- Predict the general mechanical behaviors of surrounding rock during excavation and building up a safe classification for each excavation phase using some indexes such as deformation increment and deformation velocity.
- (9)
- Judge the long-term stability of caverns using a recognized creep model by an intelligent method and estimate potential temporal stability problems.
- (1)
- Check and correct the geology condition and rock failure estimations formed before excavation. If necessary, update the geological model according to the new geology information revealed during excavation.
- (2)
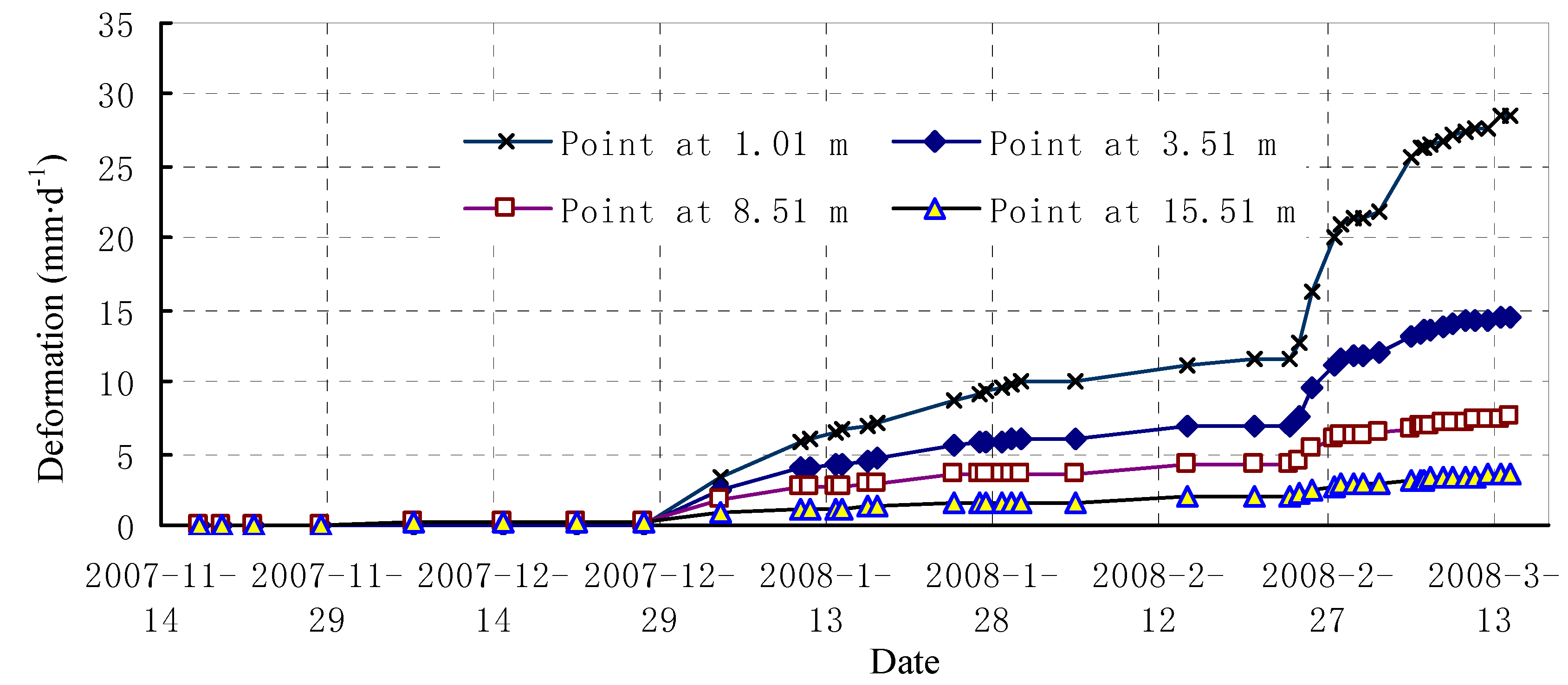
- Analyze the temporal and spatial mechanical behaviors according to the information measured in-situ, including deformation of multi-point displacement gauges, stress of inspected bolts, force of anchor wires, gap lengths of concrete, etc.
- (3)
- Audit and recognize the failure pattern of surrounding rock using the geology conditions newly revealed during excavation of caverns.
- (4)
- Recognize the equivalent mechanical parameters of surrounding rock by an intelligent recognition method, which can absorb measured and revealed new multi information during opening i layer.
- (5)
- Evaluate synthetically the caverns’ stability for opening ith layer considering information from several aspects, such as deformation of caverns, cracks of rock or concrete, loading of rock bolts or anchor wires, energy release or damage degree of rocks indicated by numerical calculation, etc.
- (6)
- Adjust dynamically the excavation scheme for opening the ith layer, including excavation parameters and excavation time, and supporting scheme, including supporting forms, supporting parameters and supporting time according actual geology condition and in-situ failure of rocks, using a globally intelligent excavation and supporting optimization method.
- (7)
- If the caverns have not been finished yet, predict the mechanical behaviors of caverns and decide the value of deformation classification for the next excavation phase. Otherwise, go to step (9).
- (8)
- Set i = i + 1, go to step (1), and start a new loop analysis for the next excavation phase if the opening of caverns is not finished.
- (9)
- Check the long-term mechanical behaviors and stability of the surrounding rock if the objective caverns have been excavated.
2.2. Characters of ISD
- (1)
- Self-learning and representation of nonlinear relationship and models. In the case of difficult understanding of the mechanism(s) of deformation and failure of rocks or rock masses, the structures of nonlinear models are sometimes hard to determine by deterministic mechanical analysis and to represent by mathematical equations. There is a lot of empirical knowledge which is not easily represented by qualitative models. Three different ways were developed for recognition of nonlinear rock mechanics models in ISD:
- (i)
- Artificial intelligent models, such as neural networks and support vector machines, are attractive for learning and representation of these nonlinear models. For example, neural network models for rock classification, tunnel support design and nonlinear time-series displacement [24,25], etc., have been established.
- (ii)
- Expert systems are competent to extract expertise and to perform an inference process in obtaining the solutions. Expert systems for rockburst risk assessment, support design of caverns, recognition of failure modes of surrounding rock, etc., have been developed.
- (iii)
- Genetic programming is attractive to recognize the structures of nonlinear rock mechanics models which are represented by mathematical equations. Some intelligent search algorithms, such as genetic algorithms and particle swarm optimization, can be used to determine the coefficients of mechanical models [26].
- (2)
- Search of models’ coefficients with known structures from the measured and tested data in global space. In order to avoid local optimization, some intelligent algorithms, such as genetic algorithms and particle swarm optimization, etc., can be used. For example, coefficients of the nonlinear stress-strain-time relationship of soft rocks were identified by using a genetic algorithm [27].
- (3)
- Intelligent back analysis of rock mechanical parameters. There are several intelligent back analysis techniques that been proposed, which include:
- (i)
- Global search algorithms (i.e., genetic algorithm, particle swarm algorithm)—numerical analysis.
- (ii)
- Evolutionary neural networks—numerical analysis—global search algorithms.
- (iii)
- Evolutionary support vector machines—numerical analysis—global search algorithms.
- (iv)
- Before applying the methods mentioned above, sensitivity analysis has to be performed to select mechanical parameters which are sensitive to the measured variables for back analysis. For example, the deformation modulus can be back analyzed by using the monitored displacement. The multi monitoring information, such as displacement and depth of excavation damage zones, is needed to recognize deformation and strength parameters.
- (4)
- Dynamic loop analysis and design optimization method. It is not easy to understand the geological conditions of large underground rock engineering projects accurately before the excavation. The mechanical behavior of rock masses can be monitored during excavation and the monitoring information can be used for back analysis of the mechanical parameters of rock masses. Therefore, a dynamic loop stability analysis and design optimization method is proposed. The loop analysis can be implemented in real-time during the construction process, i.e., dynamic analysis and design optimization should be carried out quickly after an excavation phase has been finished and the multi information has been gathered.
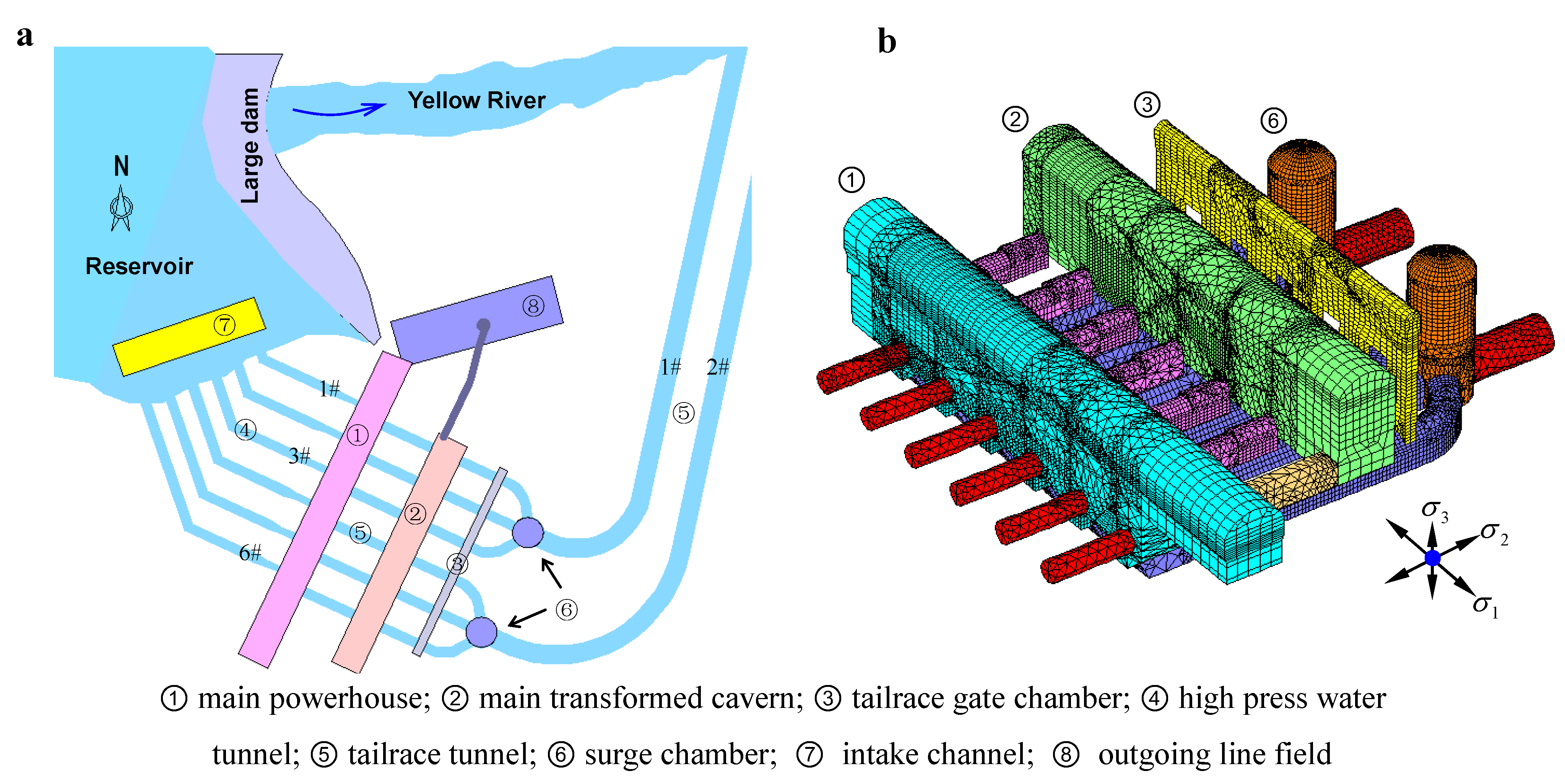
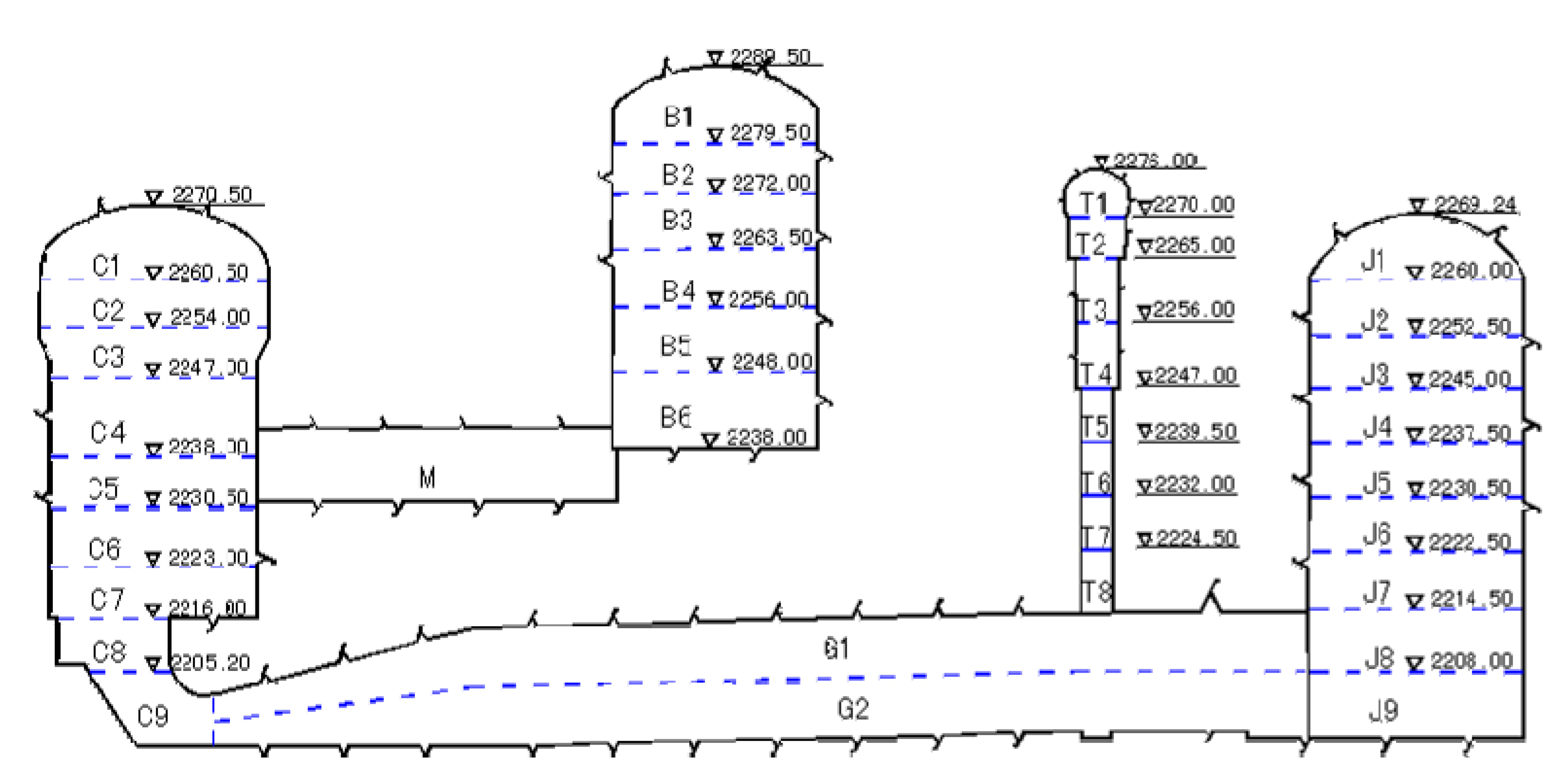
3. Case 1: Excavation Optimization of the Laxiwa Caverns in Initial Design Phase
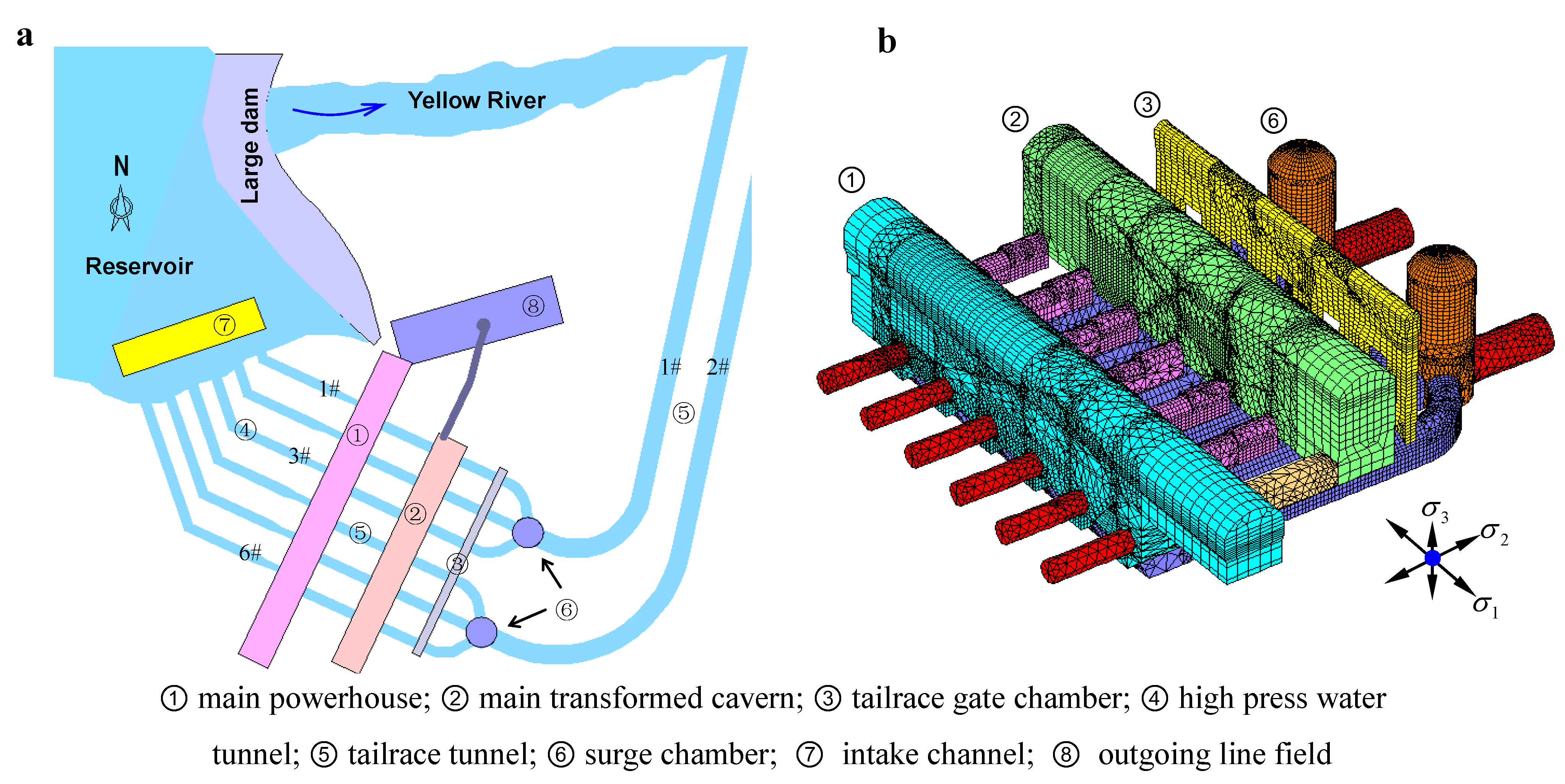
3.1. General Information about the Laxiwa Hydropower Station’s Underground Cavern Group
3.2. Optimization Algorithm for the Excavation Scheme
- Step 1:
- Consider several tentative excavation procedures to be recognized and presented as spatial location of particles. The locations of particles and their velocity can be initially given some values from a given range according to empirical knowledge.
- Step 2:
- Generate randomly, by obeying the restricted conditions, the candidate excavation procedure schemes for the given cavern group.
- Step 3:
- Input every tentative value pair of excavation procedure to the trained SVM and output value of each stability appraisal index.
- Step 4:
- If the scheme, which corresponds to the minimum values of stability appraisal indexes, has been found according to expression (1), stop the optimization process. Otherwise, go to Step 5.where the symbol “min” means the minimum value; wi is weight coefficient; pi is the fitness of a given particle and s is the variance.
- Step 5:
- Compare current fitness, p, of the particle with its previous best one Pid. If p is better than Pid, then Pid = p.
- Step 6:
- Compare the best fitness, p, of each particle with the best fitness of all particles, Pgd. If p is better than Pgd, and then Pgd = p.
- Step 7:
- Modify locations of particles and their velocity according to Equation (5):in which vid is velocity of the ith particle at the d dimensions; xid is location of the ithparticle at the d dimensions; r1 and r2 are random number distributed uniformly in (0, 1); c1 and c2 are learning factors.
- Step 8:
- If the fitness of particles or evolutionary generations have reached the given values, the above evolutionary process of the excavation procedures ends. It gives the optimum locations of particles, i.e., the best excavation procedure for the given cavern group. Otherwise, go to Step 3.
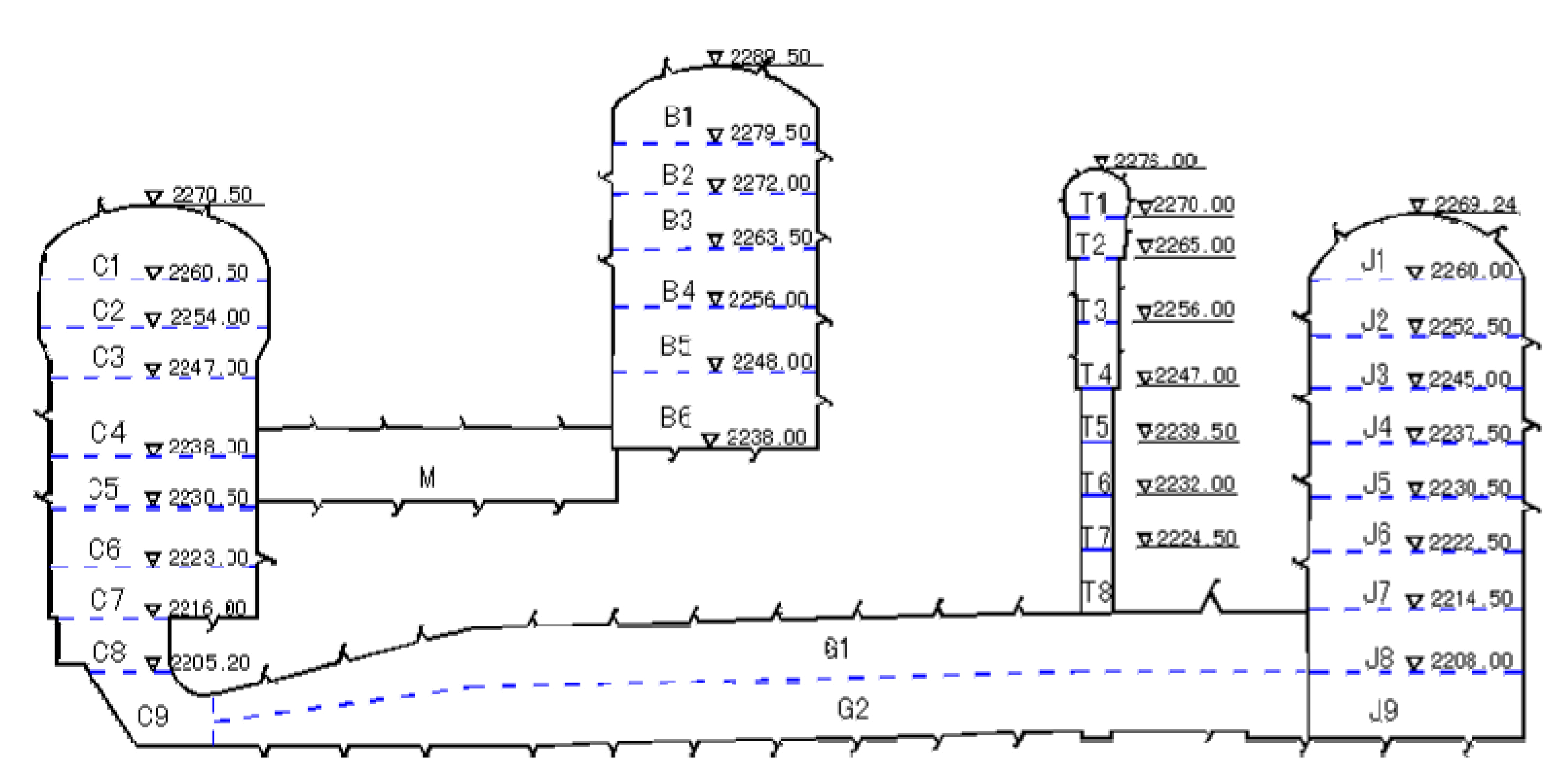
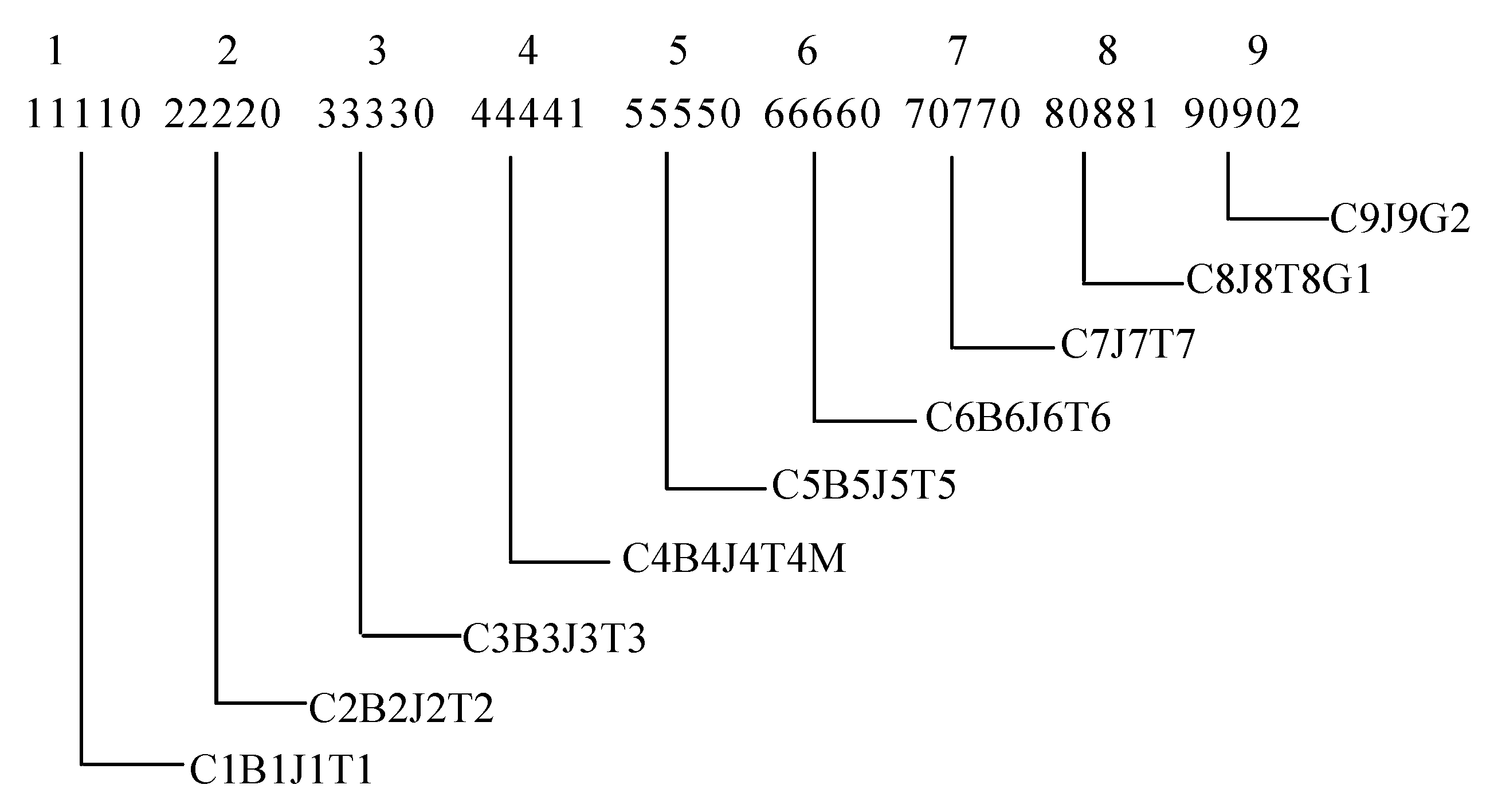
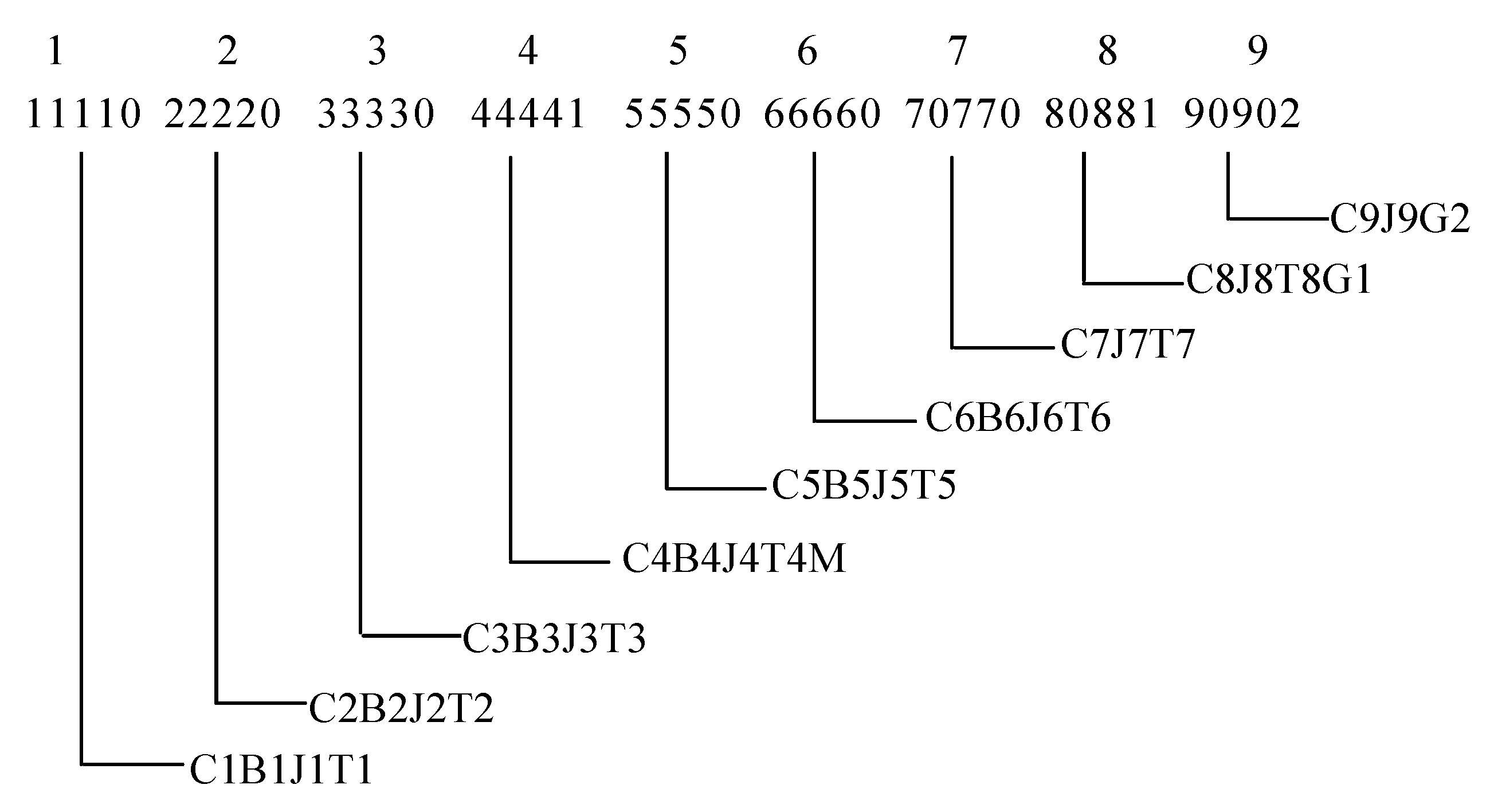
3.3. Optimization of the Laxiwa Caverns’ Excavation Scheme

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Excavation Procedure Codes | Era (×109 J) | Pzv (×104 m3) | Asp (mm) | Adp (mm) | Ast (mm) | Adt (mm) |
|---|---|---|---|---|---|---|
| 1 0 1 1 0 2 1 2 2 0 3 2 3 3 0 4 3 4 4 1 5 4 5 5 0 6 5 6 6 1 7 0 7 7 0 8 6 8 8 2 9 0 9 0 0 | 5.37 | 84.05 | 20.24 | 42.89 | 18.87 | 29.68 |
| 1 1 1 1 0 2 2 2 2 0 3 3 3 3 0 4 0 4 4 1 5 4 5 5 0 6 0 6 6 0 7 5 7 7 1 8 6 8 8 2 9 0 9 0 0 | 5.36 | 84.29 | 20.24 | 42.92 | 18.75 | 29.94 |
| 1 1 1 1 0 2 0 2 2 0 3 2 3 3 0 4 3 4 4 1 5 4 5 5 1 6 0 6 6 0 7 5 7 7 0 8 6 8 8 0 9 0 9 0 2 | 5.30 | 84.52 | 20.13 | 43.42 | 18.82 | 29.79 |
| 1 1 1 1 0 2 2 2 2 0 3 3 3 3 0 4 0 4 4 1 5 0 5 5 0 6 4 6 6 1 7 5 7 7 0 8 6 8 8 0 9 0 9 0 2 | 5.28 | 85.04 | 19.67 | 43.45 | 18.93 | 29.97 |
| 1 1 1 1 0 2 0 2 2 0 3 2 3 3 0 4 3 4 4 1 5 0 5 5 0 6 4 6 6 0 7 5 7 7 1 8 6 8 8 0 9 0 9 0 2 | 5.32 | 84.63 | 20.18 | 43.44 | 18.83 | 29.97 |
| 1 1 1 1 0 2 2 2 2 0 3 0 3 3 0 4 0 4 4 1 5 3 5 5 0 6 4 6 6 0 7 5 7 7 0 8 6 8 8 1 9 0 9 0 2 | 5.39 | 85.62 | 20.27 | 43.74 | 18.72 | 29.68 |
| 1 0 1 1 0 2 0 2 2 0 3 1 3 3 0 4 2 4 4 1 5 3 5 5 1 6 4 6 6 0 7 5 7 7 2 8 6 8 8 0 9 0 9 0 0 | 5.49 | 84.92 | 20.39 | 42.78 | 18.80 | 29.32 |
| 1 0 1 1 0 2 0 2 2 0 3 1 3 3 0 4 2 4 4 1 5 3 5 5 0 6 4 6 6 0 7 5 7 7 0 8 6 8 8 1 9 0 9 0 2 | 5.41 | 85.67 | 20.29 | 43.65 | 18.70 | 29.68 |
| 1 1 1 1 0 2 2 2 2 0 3 3 3 3 0 4 4 4 4 1 5 0 5 5 0 6 5 6 6 1 7 0 7 7 2 8 0 8 8 0 9 6 9 0 0 | 5.35 | 84.64 | 19.49 | 43.12 | 18.96 | 29.31 |
| 1 1 1 1 0 2 2 2 2 0 3 0 3 3 0 4 3 4 4 1 5 4 5 5 1 6 5 6 6 0 7 0 7 7 0 8 0 8 8 2 9 6 9 0 0 | 5.30 | 84.66 | 20.17 | 43.28 | 18.85 | 29.23 |
| 1 1 1 1 0 2 2 2 2 0 3 3 3 3 0 4 0 4 4 1 5 4 5 5 0 6 0 6 6 0 7 5 7 7 1 8 0 8 8 2 9 6 9 0 0 | 5.33 | 85.36 | 19.58 | 43.27 | 18.95 | 29.68 |
| 1 1 1 1 0 2 0 2 2 0 3 2 3 3 0 4 3 4 4 1 5 4 5 5 1 6 0 6 6 0 7 5 7 7 0 8 0 8 8 0 9 6 9 0 2 | 5.31 | 84.47 | 20.06 | 43.36 | 18.83 | 29.52 |
| 1 1 1 1 0 2 0 2 2 0 3 2 3 3 0 4 3 4 4 1 5 0 5 5 0 6 4 6 6 0 7 5 7 7 1 8 0 8 8 0 9 6 9 0 2 | 5.38 | 84.92 | 20.10 | 43.42 | 18.84 | 29.76 |
| 1 1 1 1 0 2 2 2 2 0 3 0 3 3 0 4 0 4 4 1 5 3 5 5 0 6 4 6 6 0 7 5 7 7 0 8 0 8 8 1 9 6 9 0 2 | 5.44 | 85.58 | 20.15 | 43.74 | 18.70 | 29.42 |
| 1 0 1 1 0 2 0 2 2 0 3 1 3 3 0 4 2 4 4 1 5 3 5 5 1 6 4 6 6 0 7 5 7 7 2 8 0 8 8 0 9 6 9 0 0 | 5.38 | 84.75 | 19.55 | 43.07 | 18.93 | 30.26 |
| 1 1 1 1 0 2 2 2 2 0 3 3 3 3 0 4 0 4 4 1 5 4 5 5 0 6 0 6 6 1 7 0 7 7 2 8 5 8 8 0 9 6 9 0 0 | 5.43 | 85.96 | 20.17 | 43.22 | 19.10 | 29.55 |
| 1 1 1 1 0 2 0 2 2 0 3 2 3 3 0 4 3 4 4 1 5 4 5 5 1 6 0 6 6 0 7 0 7 7 0 8 5 8 8 2 9 6 9 0 0 | 5.43 | 85.53 | 20.44 | 43.26 | 18.91 | 29.26 |
| 1 1 1 1 0 2 2 2 2 0 3 3 3 3 0 4 0 4 4 1 5 0 5 5 0 6 4 6 6 1 7 0 7 7 0 8 5 8 8 2 9 6 9 0 0 | 5.38 | 86.00 | 20.10 | 43.29 | 19.02 | 29.56 |
| 1 1 1 1 0 2 2 2 2 0 3 0 3 3 0 4 0 4 4 1 5 3 5 5 1 6 4 6 6 0 7 0 7 7 0 8 5 8 8 0 9 6 9 0 2 | 5.42 | 85.94 | 20.68 | 43.50 | 18.84 | 29.47 |
| 1 0 1 1 0 2 1 2 2 0 3 2 3 3 0 4 0 4 4 1 5 3 5 5 0 6 4 6 6 1 7 0 7 7 0 8 5 8 8 0 9 6 9 0 2 | 5.48 | 85.57 | 20.57 | 43.45 | 18.79 | 29.50 |
| 1 0 1 1 0 2 1 2 2 0 3 0 3 3 0 4 2 4 4 1 5 3 5 5 0 6 4 6 6 0 7 0 7 7 1 8 5 8 8 0 9 6 9 0 2 | 5.53 | 85.92 | 20.79 | 43.51 | 18.79 | 29.61 |
| 1 1 1 1 0 2 2 2 2 0 3 3 3 3 0 4 0 4 4 1 5 0 5 5 0 6 0 6 6 0 7 4 7 7 0 8 5 8 8 1 9 6 9 0 2 | 5.37 | 85.41 | 19.98 | 43.77 | 18.92 | 29.81 |
| 1 0 1 1 0 2 1 2 2 0 3 2 3 3 0 4 3 4 4 1 5 0 5 5 1 6 0 6 6 2 7 4 7 7 0 8 5 8 8 0 9 6 9 0 0 | 5.39 | 85.37 | 20.75 | 43.23 | 19.01 | 28.90 |
| 1 0 1 1 0 2 0 2 2 0 3 1 3 3 0 4 2 4 4 1 5 3 5 5 0 6 0 6 6 1 7 4 7 7 0 8 5 8 8 0 9 6 9 0 2 | 5.34 | 84.75 | 20.30 | 43.39 | 18.80 | 29.86 |
| 1 0 1 1 0 2 1 2 2 0 3 0 3 3 0 4 0 4 4 1 5 2 5 5 1 6 3 6 6 0 7 4 7 7 0 8 5 8 8 0 9 6 9 0 2 | 5.45 | 86.15 | 20.84 | 43.53 | 18.82 | 29.06 |
| 1 0 1 1 0 2 0 2 2 0 3 0 3 3 0 4 1 4 4 1 5 2 5 5 1 6 3 6 6 0 7 4 7 7 0 8 5 8 8 2 9 6 9 0 0 | 5.43 | 85.07 | 20.80 | 43.18 | 18.81 | 28.75 |
| 1 0 1 1 0 2 1 2 2 0 3 2 3 3 0 4 3 4 4 1 5 4 5 5 1 6 5 6 6 0 7 6 7 7 2 8 0 8 8 0 9 0 9 0 0 | 5.45 | 83.98 | 19.94 | 42.76 | 18.74 | 30.02 |
| 1 1 1 1 0 2 0 2 2 0 3 0 3 3 0 4 2 4 4 1 5 3 5 5 1 6 4 6 6 2 7 5 7 7 0 8 6 8 8 0 9 0 9 0 0 | 5.50 | 84.90 | 20.41 | 42.91 | 18.86 | 29.22 |
| 1 0 1 1 0 2 1 2 2 0 3 2 3 3 0 4 3 4 4 1 5 4 5 5 0 6 5 6 6 1 7 0 7 7 0 8 0 8 8 2 9 6 9 0 0 | 5.33 | 84.90 | 20.19 | 43.14 | 18.78 | 29.31 |
| 1 1 1 1 0 2 0 2 2 0 3 0 3 3 0 4 2 4 4 1 5 3 5 5 1 6 4 6 6 2 7 5 7 7 0 8 0 8 8 0 9 6 9 0 0 | 5.48 | 85.25 | 20.29 | 43.20 | 18.86 | 28.77 |
| 1 1 1 1 0 2 0 2 2 0 3 2 3 3 0 4 3 4 4 1 5 0 5 5 0 6 4 6 6 0 7 0 7 7 1 8 5 8 8 2 9 6 9 0 0 | 5.38 | 84.75 | 19.55 | 43.07 | 18.93 | 30.26 |
| 1 0 1 1 0 2 0 2 2 0 3 1 3 3 0 4 2 4 4 1 5 0 5 5 1 6 3 6 6 0 7 4 7 7 0 8 5 8 8 0 9 6 9 0 2 | 5.46 | 86.07 | 20.77 | 43.54 | 18.80 | 29.11 |
3.4. Technique Audit

4. Case 2: Stability Management of the Jinping II Hydropower Station in Dynamic Design Phase
4.1. General Information about the Jinping II Hydropower Station’s Underground Group
4.2. Stability Management of Surrounding Rock during Excavation
4.2.1. Intelligent Feedback Analysis and Stability Design for the First Phase
| Parameters | Eo (GPa) | Co (MPa) |
|---|---|---|
| Value | 7.04 | 8.03 |
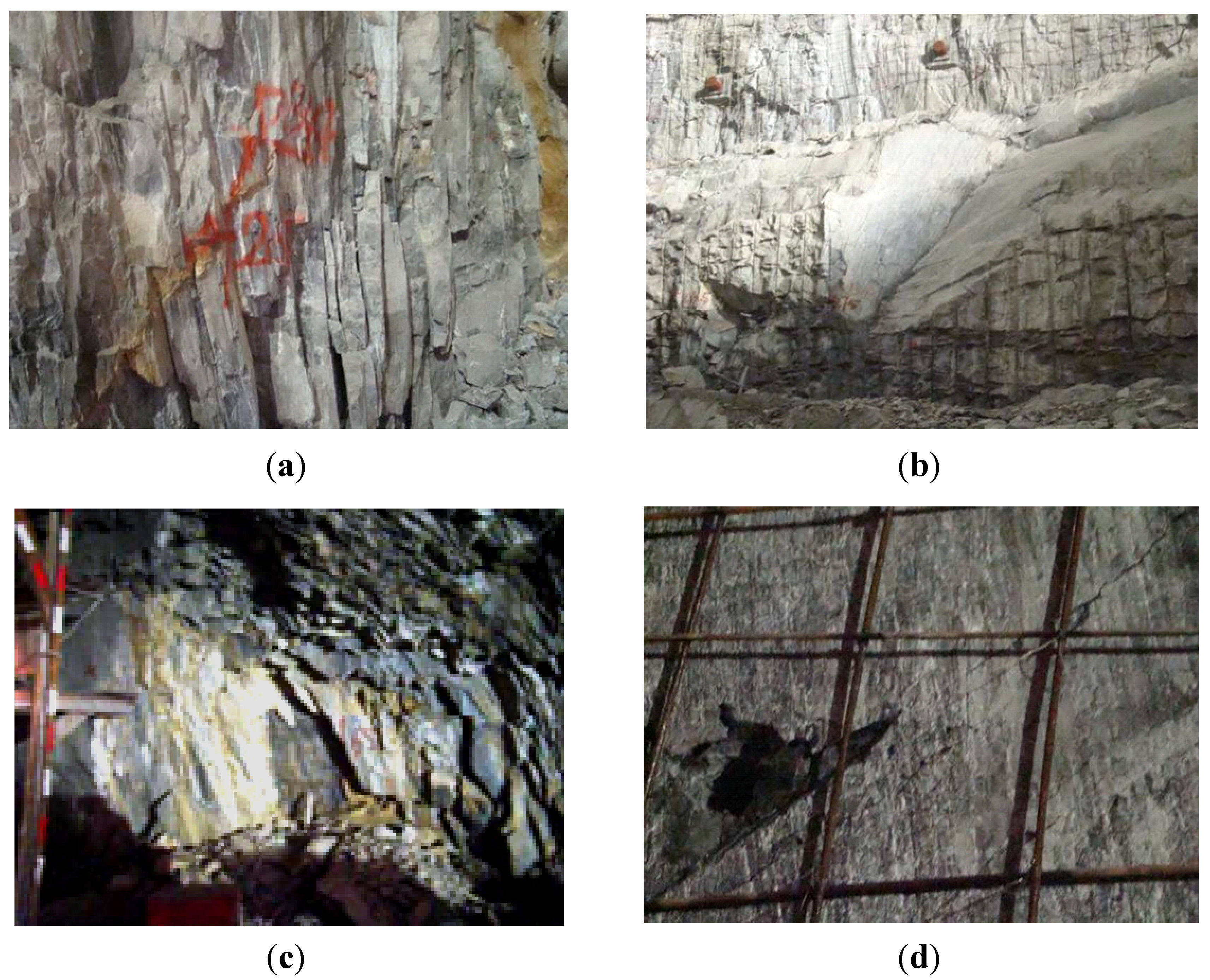
- (1)
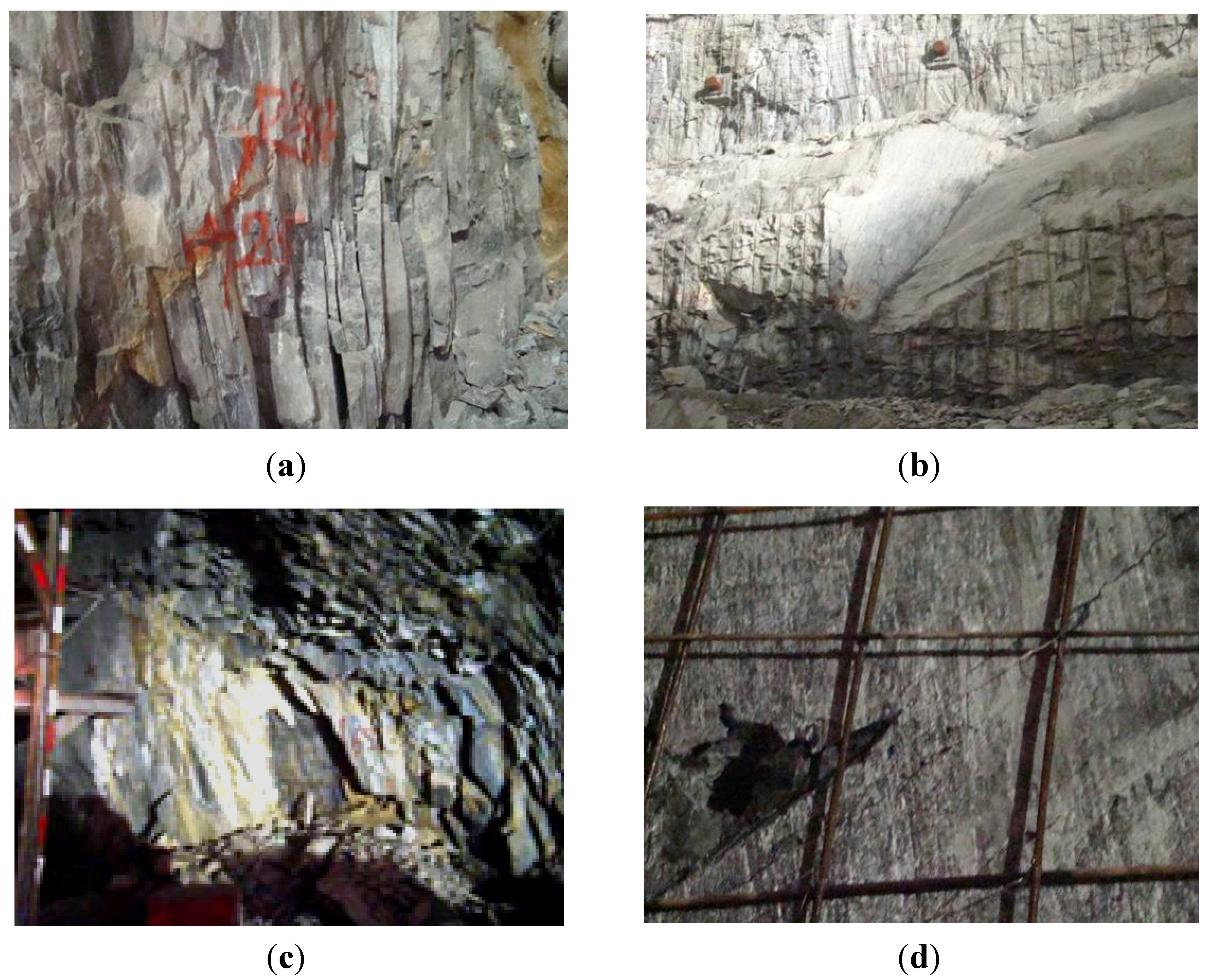
- The position of the gross distortion occurred at the upstream wall with a maximum deformation of about 24 mm.
- (2)
- The depth of plastic zone was about 3 m at the upstream wall and about 2 m at the downstream wall.
- (3)
- The redistributed maximum principal stress was nearly vertical and the minimum principal stress was approximately horizontal at the upstream wall (shown as Figure 11).
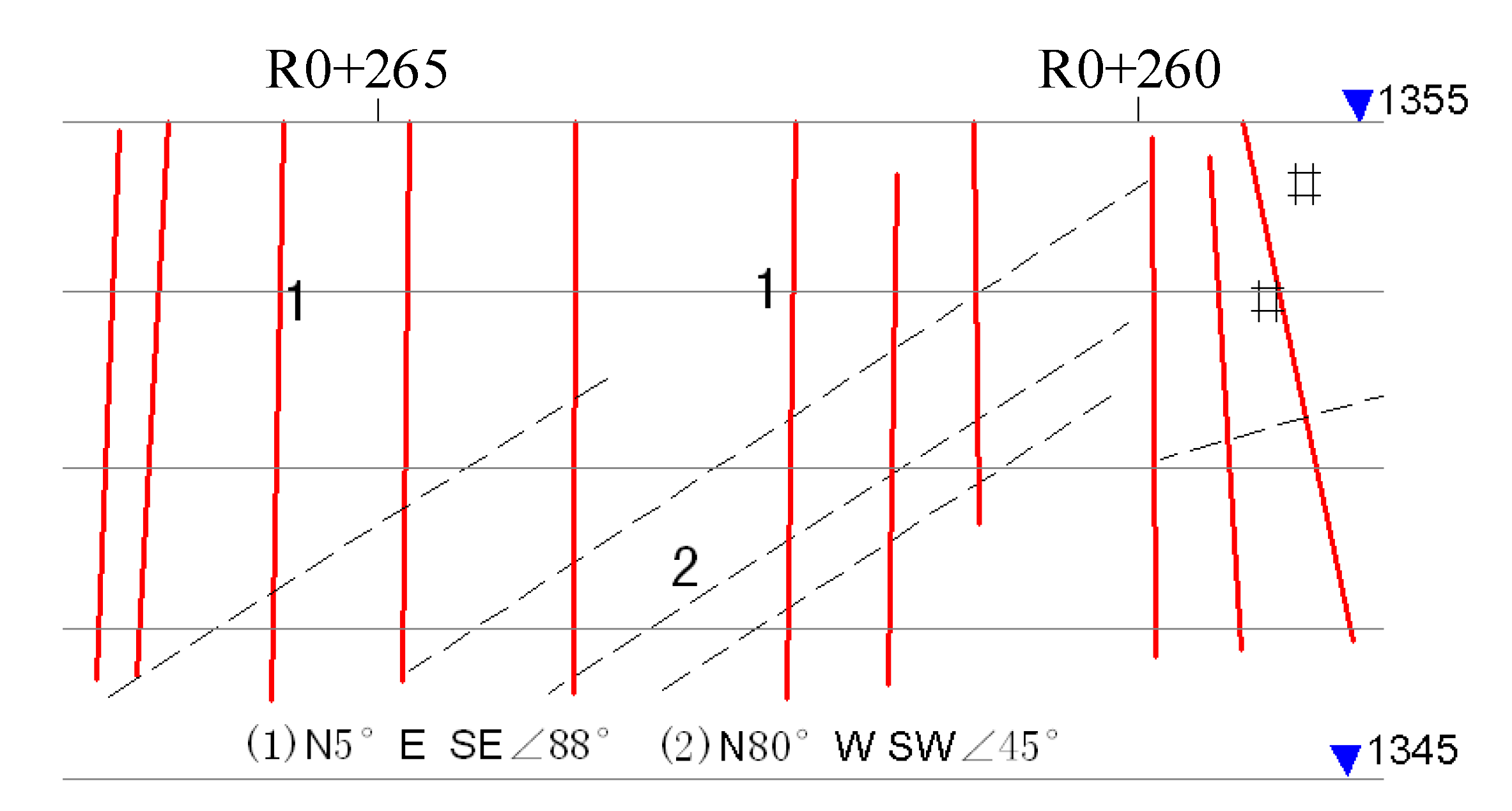
- (1)
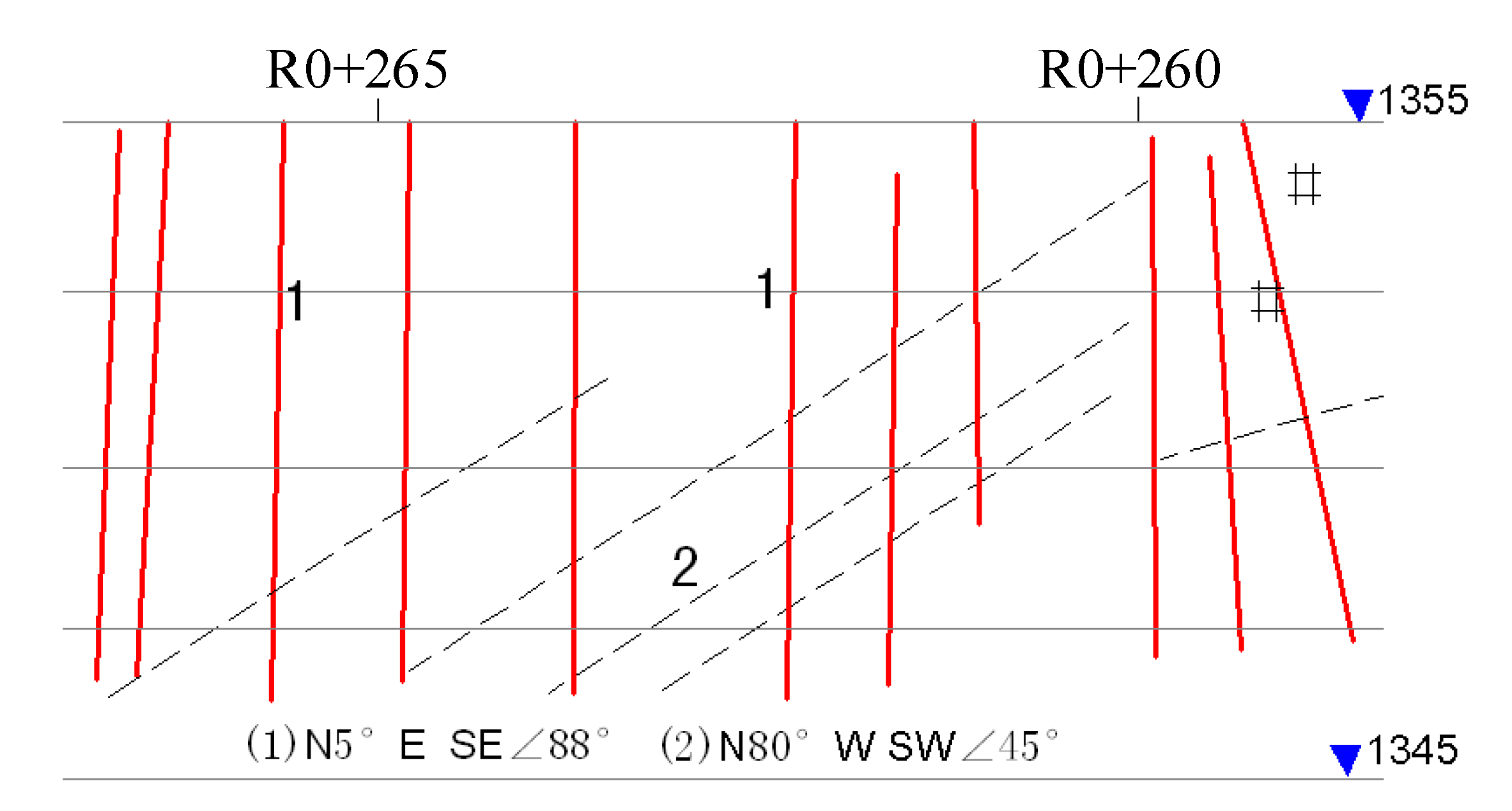
- Stop excavation temporarily at the region from R 0+230 to R 0+290 until completion of the rock support work.
- (2)
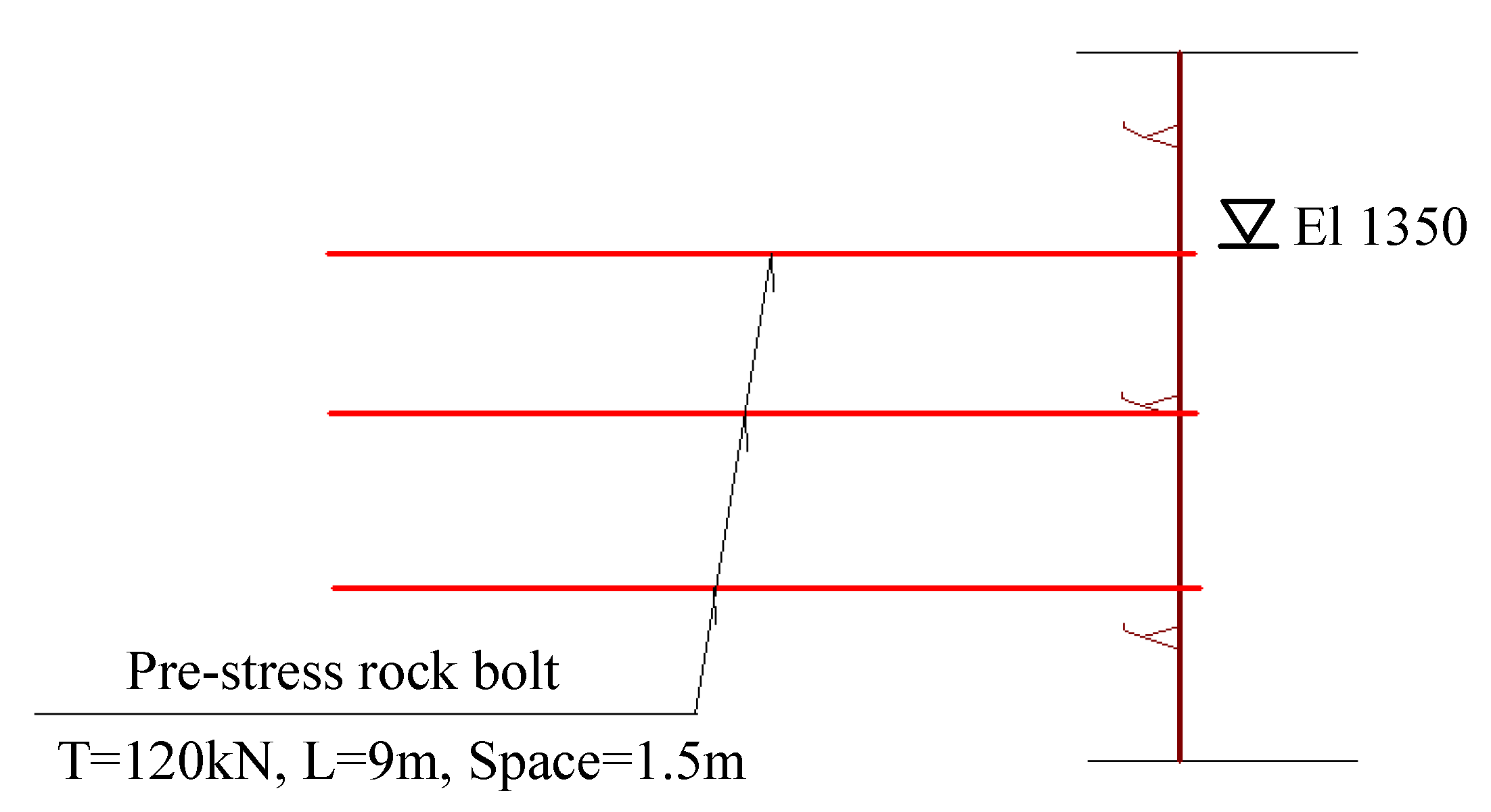
- Install rock bolts with spacing of 1.5 m and 6/9 m length immediately, and install pre-stressed anchor cable with spacing of 3 m and initial force 1050 kN then. Both of them were part of the the systemic support designed before excavation.
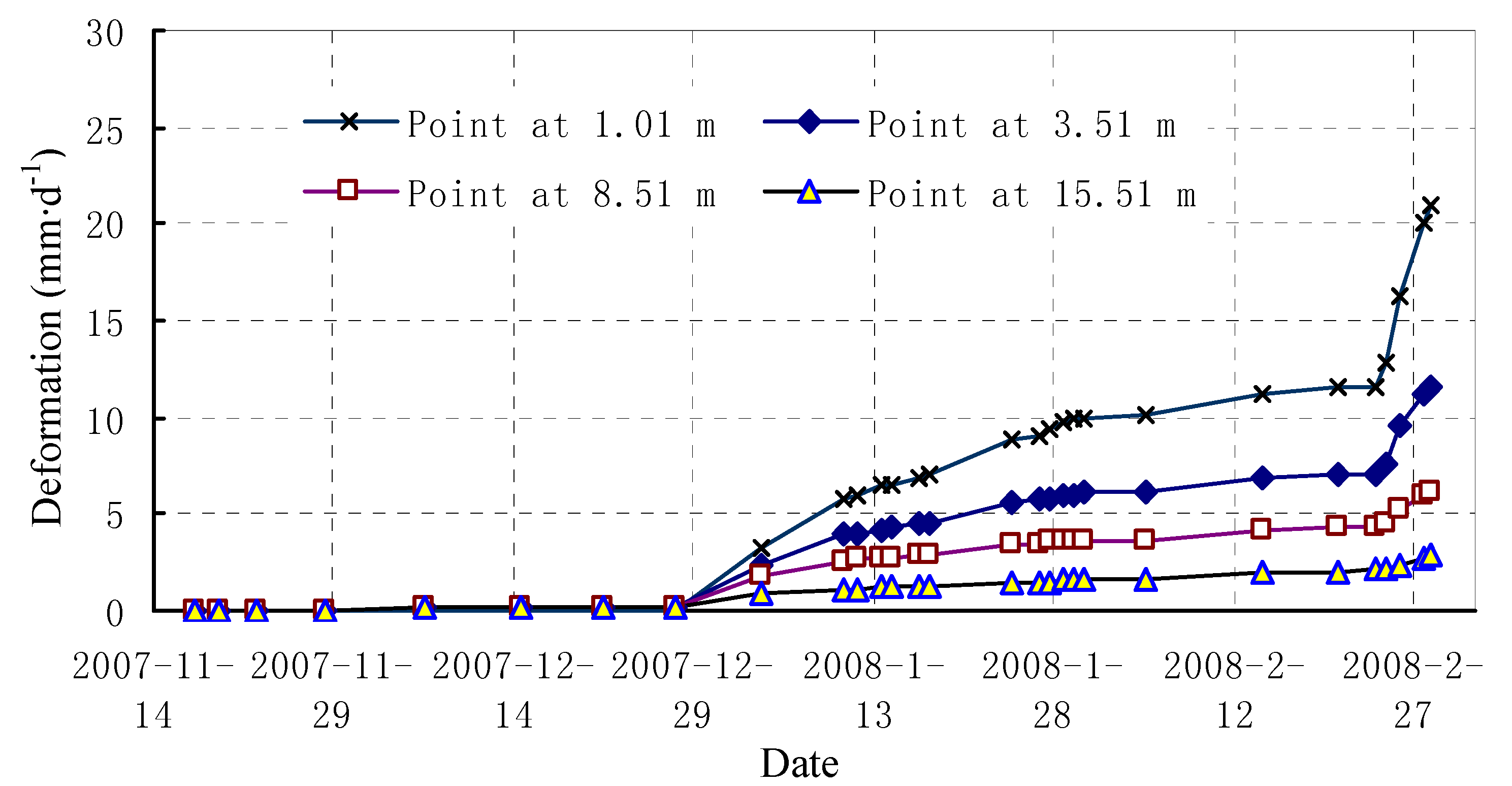
4.2.2. Prediction and Stability Design at the Second Phase
- (1)
- Support the surrounding rock over EL1347.5 m.
- (2)
- Excavate and follow-up support of the upper half of the third layer.
- (3)
- Excavate and follow-up support of the second half layer of the third layer.
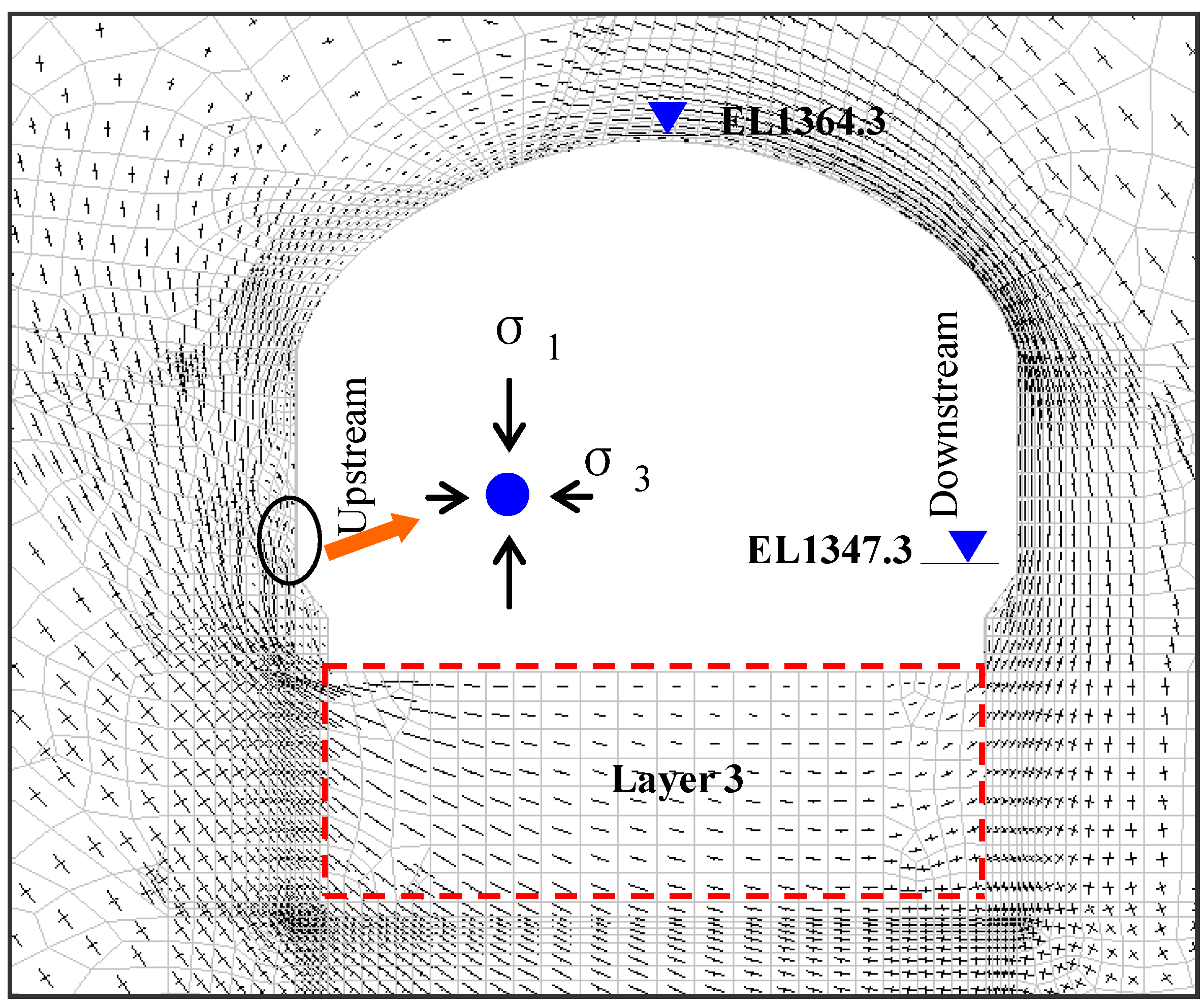
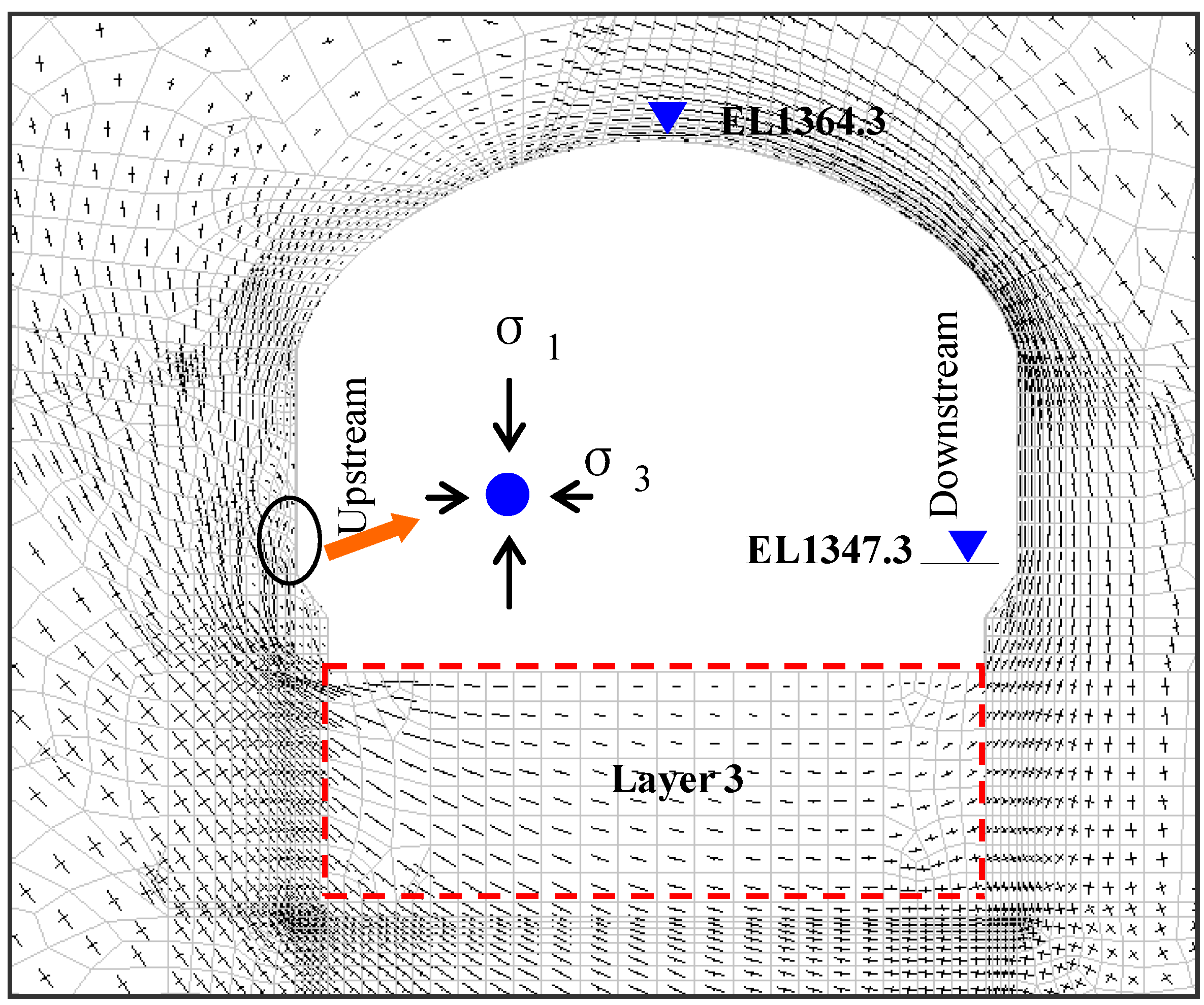
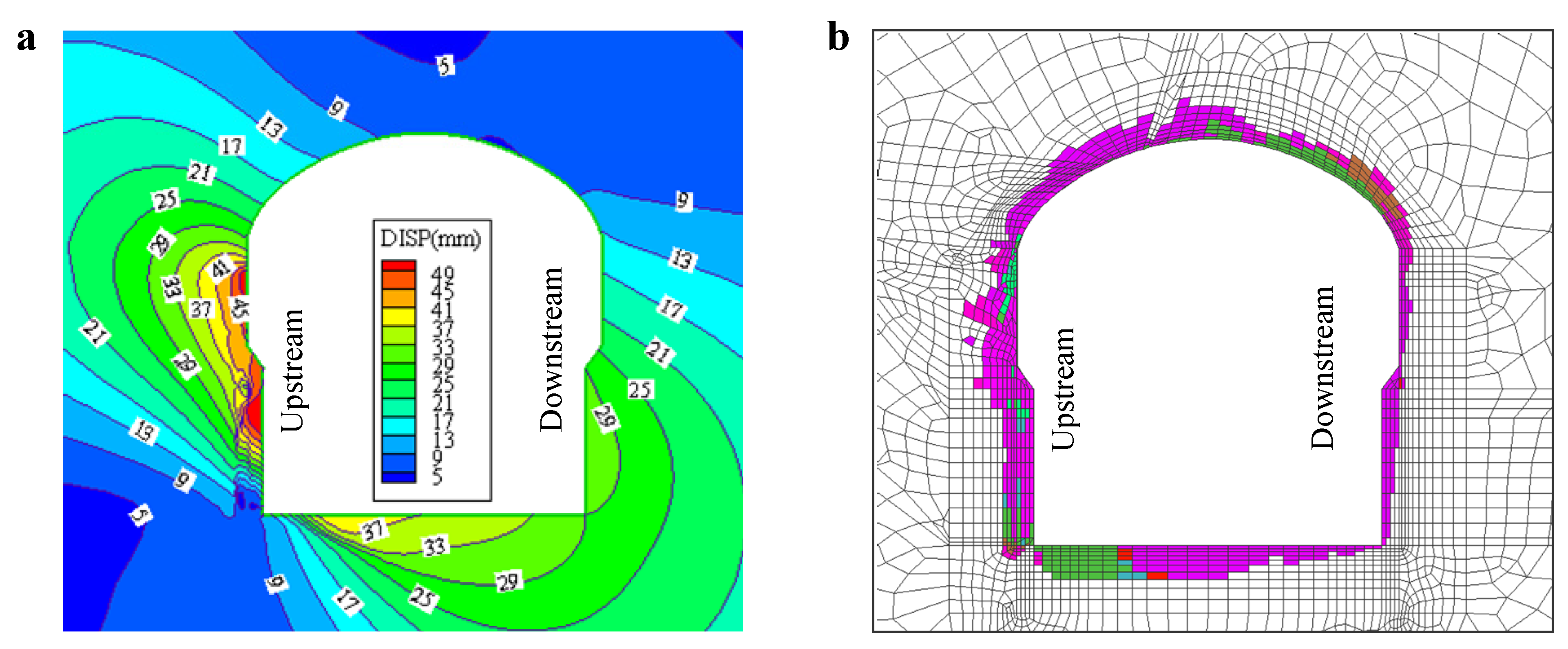
- (1)
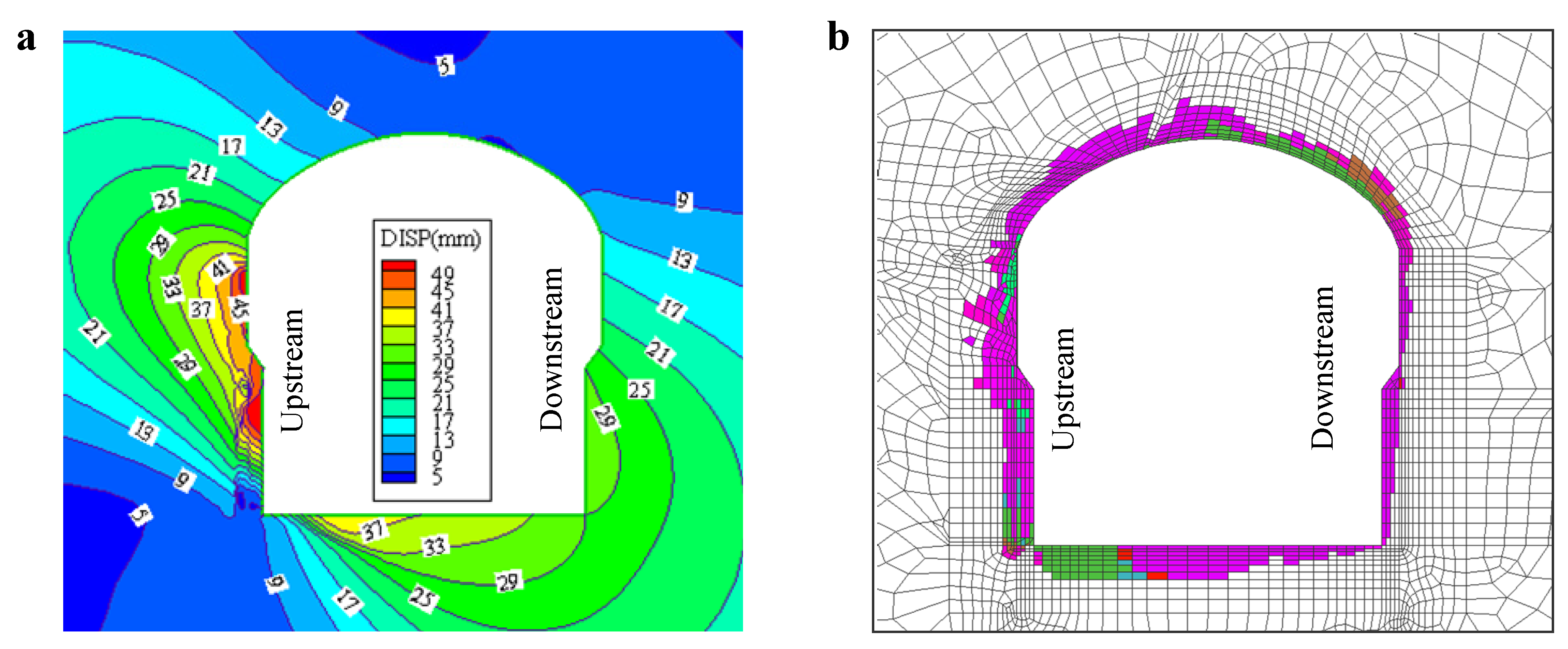
- The maximum principal stress was about −32 MPa, located at the downstream arch (Figure 13a), while obvious stress looseness occurred at the upstream side.
- (2)
- The adjustment of the secondary stress was very distinct. The maximum principal stress at upstream wall was nearly vertical and the minimum principal stress was almost horizontal which resulted in the looseness of the steep rock mass.
- (3)
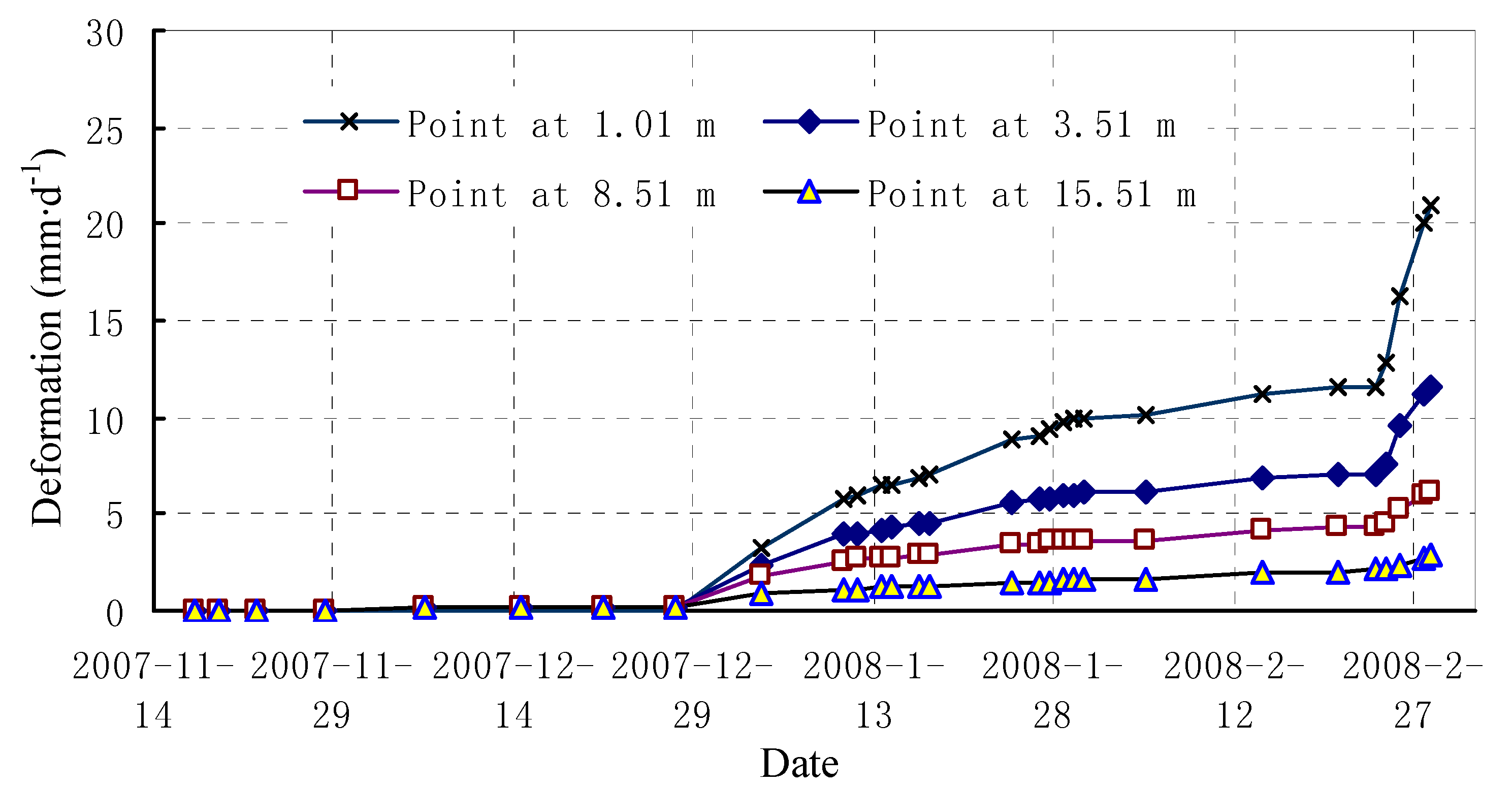
- The maximum deformation increment increased to 15–20 mm on the upstream side and the total maximum deformation was about 40–45 mm.
- (4)
- The depth of the plastic zone, which indicates the engineering looseness zone, was about 3–4 m on the upstream side and about 1.5–2.5 m on the downstream side (Figure 13b).

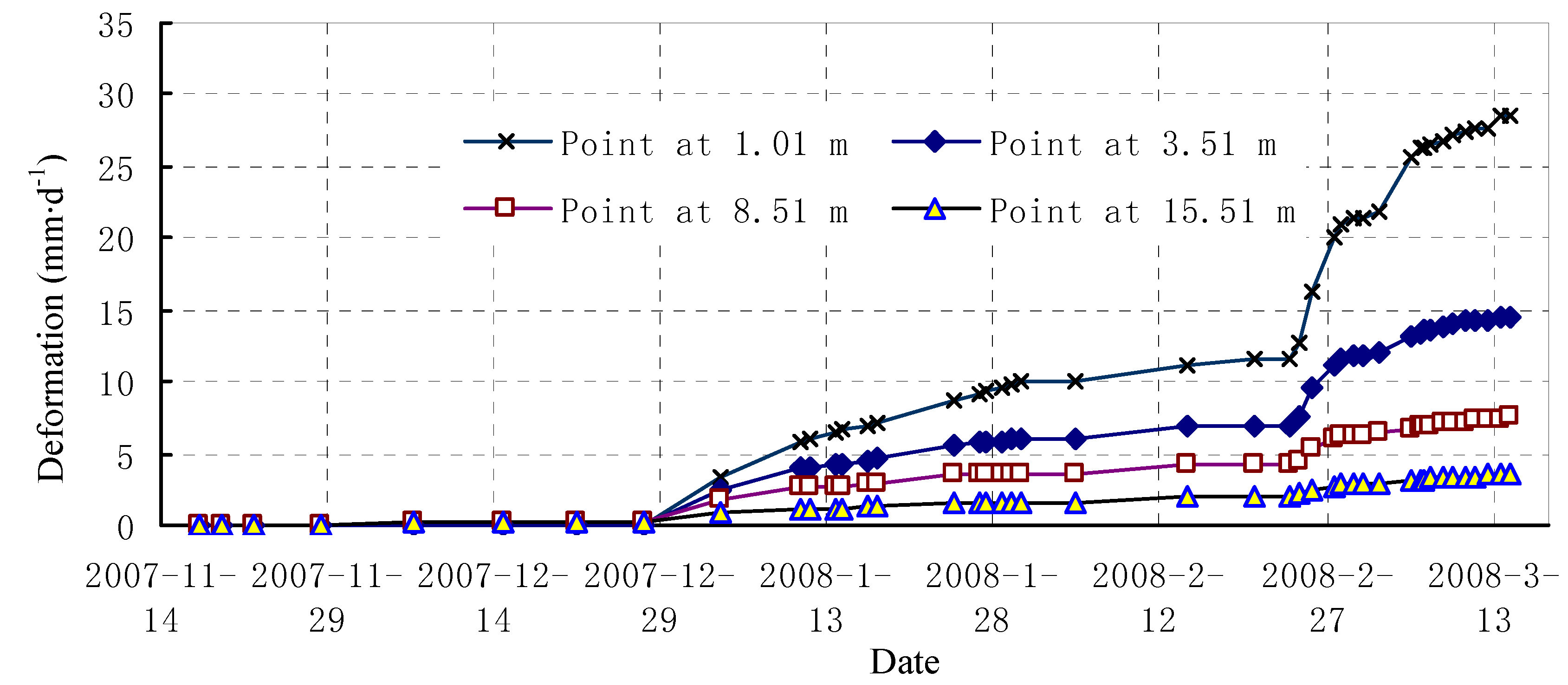
4.3. Actual Engineering Results

5. Conclusions
Acknowledgments
References
- International Energy Agency. Key World Energy Statistics 2010; International Energy Agency: Paris, France, 2007. Available online: http://www.iea.org/textbase/nppdf/free/2010/key_stats_2010.pdf (accessed on 18 May 2011).
- Lenzen, M. Current state of development of electricity-generating technologies: A literature review. Energies 2010, 3, 462–591. [Google Scholar] [CrossRef]
- Dudhani, S.; Sinha, A.K.; Inamdar, S.S. Assessment of small hydropower potential using remote sensing data for sustainable development in India. Energy Policy 2006, 34, 3195–3205. [Google Scholar] [CrossRef]
- Kaldellis, J.K. Critical evaluation of the hydropower applications in Greece. Renew. Sustain. Energy Rev. 2008, 12, 218–234. [Google Scholar] [CrossRef]
- Huang, H.; Yan, Z. Present situation and future prospect of hydropower in China. Renew. Sustain. Energy Rev. 2009, 13, 1652–1656. [Google Scholar] [CrossRef]
- Soito, J.L.S.; Freitas, M.A.V. Amazon and the expansion of hydropower in Brazil: Vulnerability, impacts and possibilities for adaptation to global climate change. Renew. Sustain. Energy Rev. 2011, 15, 3165–3177. [Google Scholar] [CrossRef]
- Deng, Z.; Carlson, T.J.; Dauble, D.D.; Plosley, G.R. Fish passage assessment of an advanced hydropower turbine and conventional turbine using blade-strike modeling. Energies 2011, 4, 57–67. [Google Scholar] [CrossRef]
- Zhu, W.S.; Li, G.Y.; Wang, K.J. Analyses of disking phenomenon and stress field in the region of an underground powerhouse. Rock Mech. Rock Eng. 1985, 18, 1–15. [Google Scholar] [CrossRef]
- Ishida, T.; Uchita, Y. Strain monitoring of borehole diameter changes in heterogeneous jointed wall rock with chamber excavation: Estimation of stress redistribution. Eng. Geol. 2000, 56, 63–74. [Google Scholar] [CrossRef]
- Dhawan, K.R.; Singh, D.N.; Gupta, I.D. 2D and 3D finite element analysis of underground openings in an inhomogeneous rock mass. Int. J. Rock Mech. Min. Sci. 2003, 39, 217–227. [Google Scholar] [CrossRef]
- Chang, S.H.; Lee, C.I.; Lee, Y.K. An experimental damage model and its application to the evaluation of the excavation damage zone. J. Rock Mech. Rock Eng. 2007, 40, 245–285. [Google Scholar] [CrossRef]
- Berest, P.; Brouard, B.; Feuga, B.; Karimi, M. The 1873 collapse of the Saint-Maximilien panel at the Uarangeville salt mine. Int. J. Rock Mech. Min. Sci. 2008, 45, 1025–1043. [Google Scholar] [CrossRef]
- Wu, F.; Hu, X.; Gong, M.; Liu, J.; Ren, A. Unloading deformation during layered excavation for the underground powerhouse of Jinping I Hydropower Station, southwest China. Bull. Eng. Geol. Environ. 2010, 69, 343–351. [Google Scholar] [CrossRef]
- Shang, Y.J.; Cai, J.G.; Hao, W.D.; Wu, X.Y.; Li, S.H. Intelligent back analysis of displacements using precedent type analysis for tunneling. Tunn. Undergr. Space Tech. 2002, 17, 381–389. [Google Scholar] [CrossRef]
- Yu, Y.Z.; Zhang, B.Y.; Yuan, H.N. An intelligent displacement back-analysis method for earth-rockfill dams. Comput. Geotech. 2007, 34, 423–434. [Google Scholar] [CrossRef]
- Wang, Z.L.; Li, Y.C.; Shen, R.F. Correction of soil parameters in calculation of embankment settlement using a BP network back-analysis model. Eng. Geol. 2007, 91, 168–177. [Google Scholar] [CrossRef]
- Liu, X.P.; Li, X.; Anthony, G.O.Y.; He, J.Q.; Tao, J. Discovery of transition rules for geographical cellular automata by using ant colony optimization. Sci. China Ser. D 2007, 50, 1578–1588. [Google Scholar] [CrossRef]
- Majdi, A.; Beiki, M. Evolving neural network using a genetic algorithm for predicting the deformation modulus of rock masses. Int. J. Rock Mech. Min. Sci. 2010, 47, 246–253. [Google Scholar] [CrossRef]
- Jiang, Q.; Feng, X.T.; Chen, J.L.; Zhang, C.S.; Huang, S.L. Nonlinear inversion of 3D initial geostress field in Jinping II Hydropower Station region. Rock Soil Mech. 2008, 29, 3003–3010. [Google Scholar]
- Jiang, Q.; Feng, X.T.; Xiang, T.B.; Su, G.S. Rockburst characteristics and numerical simulation based on a new energy index: A case study of a tunnel at 2500 m depth. Bull. Eng. Geol. Environ. 2010, 69, 381–388. [Google Scholar] [CrossRef]
- Su, G.S.; Feng, X.T.; Jiang, Q.; Chen, G.Q. Intelligent method of combinatorial optimization of excavation sequence and support parameters for large underground caverns under condition of high geostress. Chin. J. Rock Mech. Eng. 2007, 26, 2800–2808. [Google Scholar]
- Su, G.S.; Feng, X.T.; Jiang, Q.; Chen, G.Q. Study on new index of local energy release rate for stability analysis and optimal design of underground rockmass engineering with high geostress. Chin. J. Rock Mech. Eng. 2006, 25, 2453–2460. [Google Scholar]
- Zhang, C.Q.; Zhou, H.; Feng, X.T. Stability assessment of rockmass engineering based on failure approach index. Rock Soil Mech. 2007, 28, 888–894. [Google Scholar]
- Feng, X.T.; Seto, M.; Katsuyama, K. Neural dynamic modelling on earthquake magnitude series. Geophys. J. Int. 1997, 128, 547–556. [Google Scholar] [CrossRef]
- Feng, X.T.; Chen, B.R.; Yang, C.X.; Zhou, H.; Ding, X.L. Identification of visco-elastic models for rocks using genetic programming coupled with the modified particle swarm optimization algorithm. Int. J. Rock Mech. Min. Sci. 2006, 43, 789–801. [Google Scholar] [CrossRef]
- Yang, C.X.; Tham, L.G.; Feng, X.T.; Wang, Y.J.; Lee, P.K.K. Two-stepped evolutionary algorithm and its application to stability analysis of slopes. J. Comput. Civ. Eng. 2004, 18, 145–153. [Google Scholar] [CrossRef]
- Feng, X.T.; Li, S.J.; Liao, H.J.; Liao, H.J.; Yang, C.Q. Identification of nonlinear stress-strain-time relationship of soils using genetic algorithm. Int. J. Numer. Anal. Methods Geomech. 2002, 26, 815–830. [Google Scholar] [CrossRef]
© 2011 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Jiang, Q.; Feng, X. Intelligent Stability Design of Large Underground Hydraulic Caverns: Chinese Method and Practice. Energies 2011, 4, 1542-1562. https://doi.org/10.3390/en4101542
Jiang Q, Feng X. Intelligent Stability Design of Large Underground Hydraulic Caverns: Chinese Method and Practice. Energies. 2011; 4(10):1542-1562. https://doi.org/10.3390/en4101542
Chicago/Turabian StyleJiang, Quan, and Xiating Feng. 2011. "Intelligent Stability Design of Large Underground Hydraulic Caverns: Chinese Method and Practice" Energies 4, no. 10: 1542-1562. https://doi.org/10.3390/en4101542