Petri Net Model and Reliability Evaluation for Wind Turbine Hydraulic Variable Pitch Systems

Abstract
:
1. Introduction
2. Petri Net Theory
2.1. Definition of the Basic Petri Net
2.2. Basic Properties of a Petri Net
2.3. Analytical Method of the Petri Net
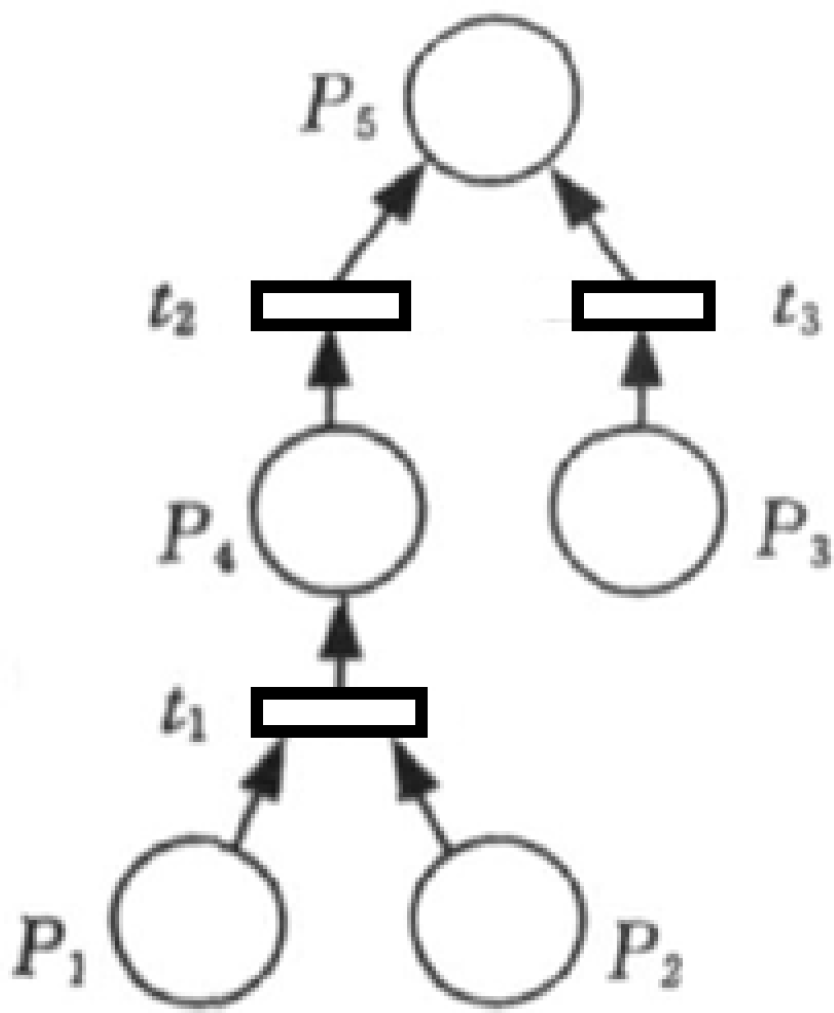
2.3.1. Reachable Marking Graph and Coverable Tree
f : E → T, f(Mi, Mj) = tk

2.3.2. Incidence Matrix and Invariant
2.3.3. Linguistics Analysis Method
2.3.4. Computer Simulation Analysis
2.3.5. Structural Analysis

3. Modeling of a Hydraulic Variable Pitch System Based on the Petri Net
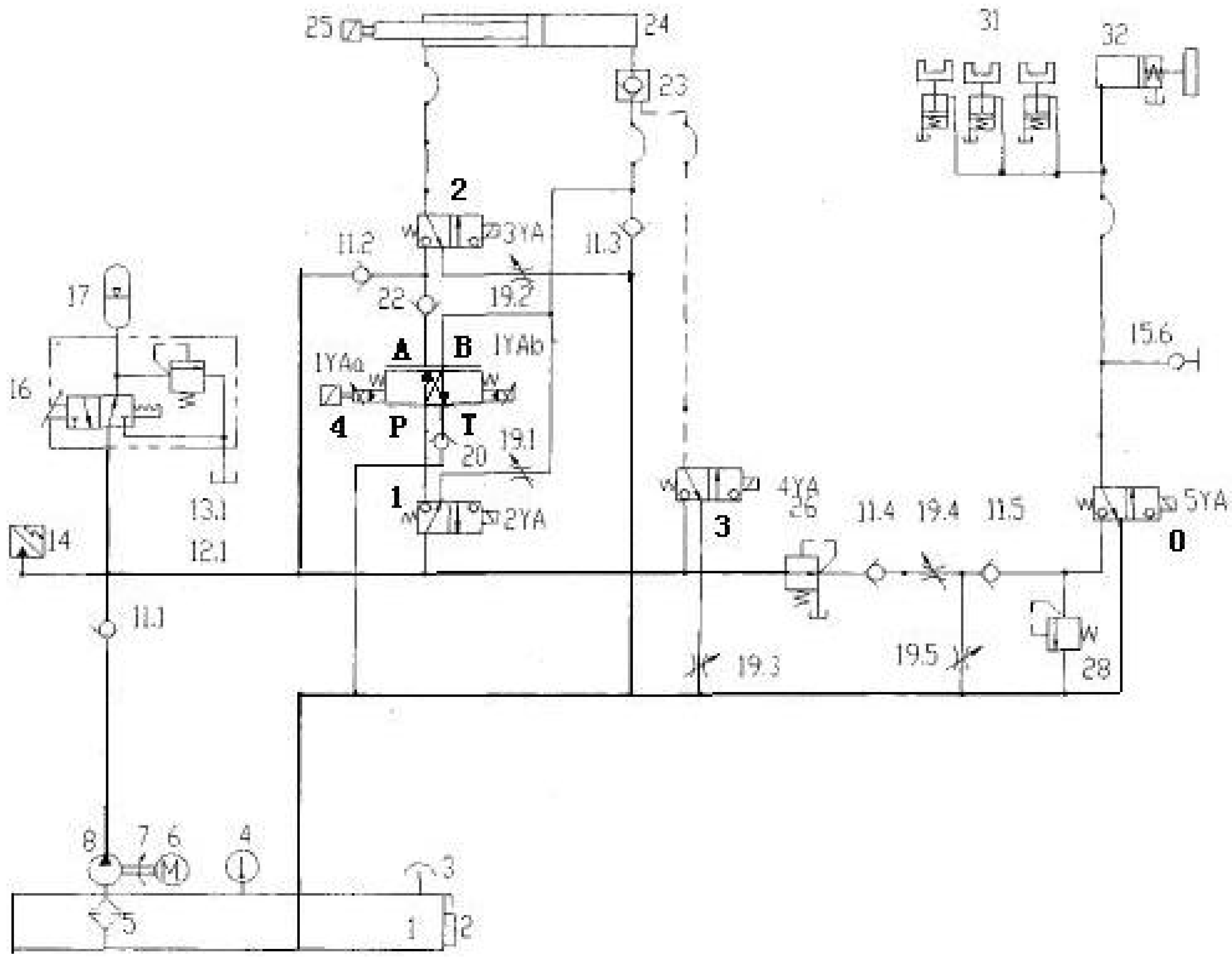
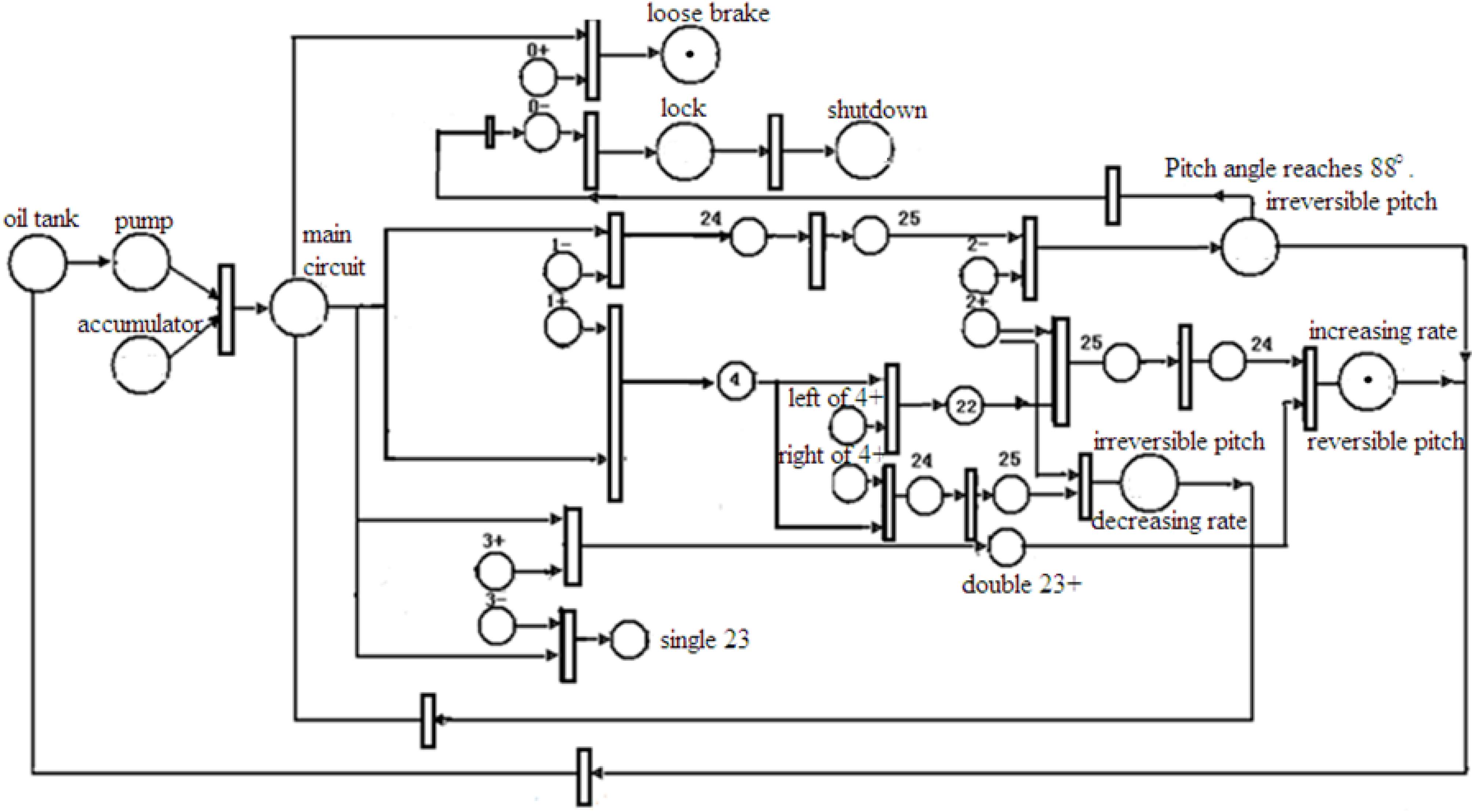
3.1. Working Process of a Hydraulic Variable Pitch System

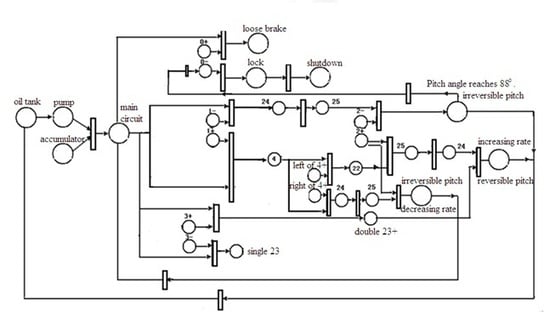
3.2. Basic Petri Net Model of a Hydraulic Variable Pitch System





4. Modeling Based on the Fault Petri Net of a Hydraulic Variable Pitch System
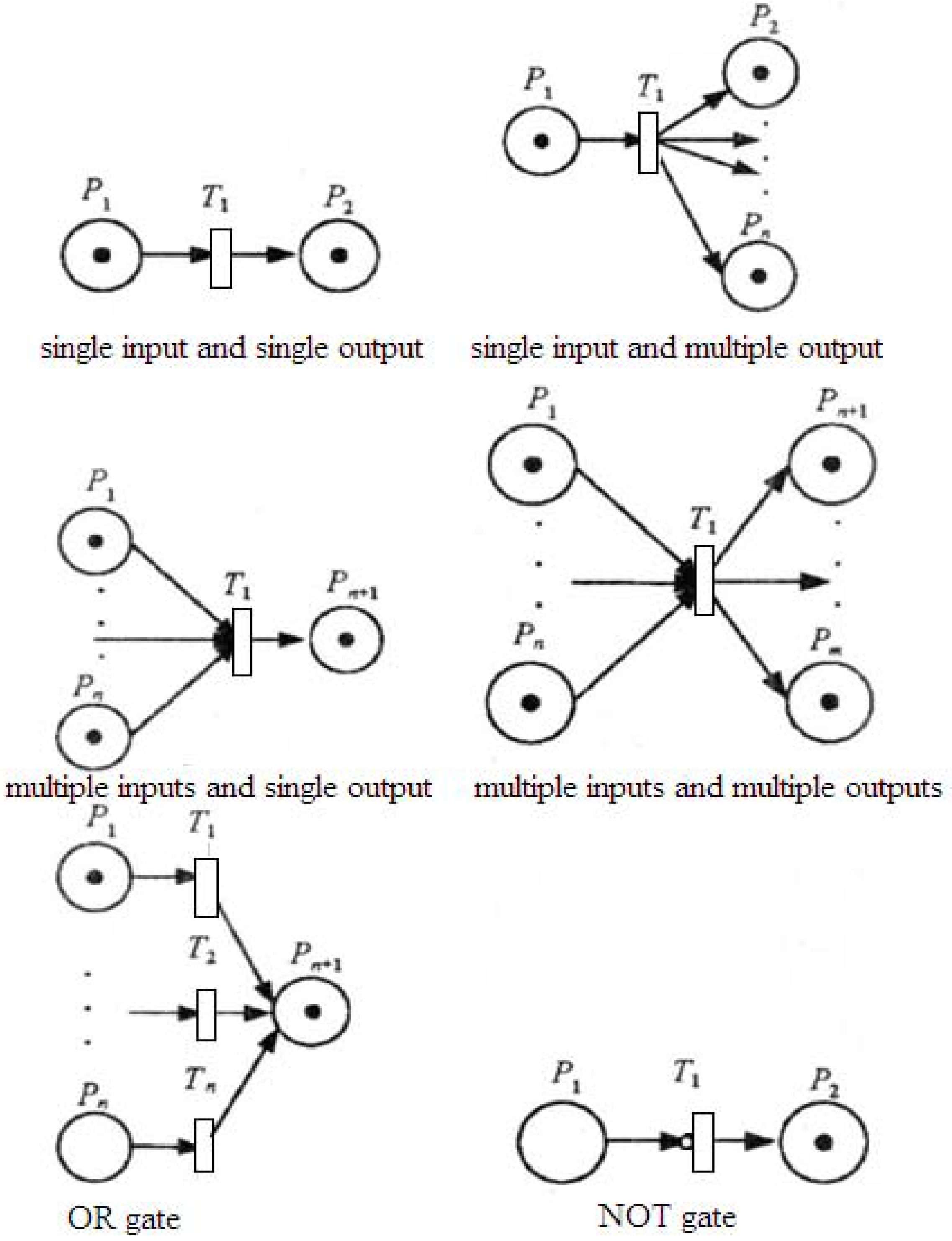
4.1. Difference between Fault Tree and Fault Petri Net

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
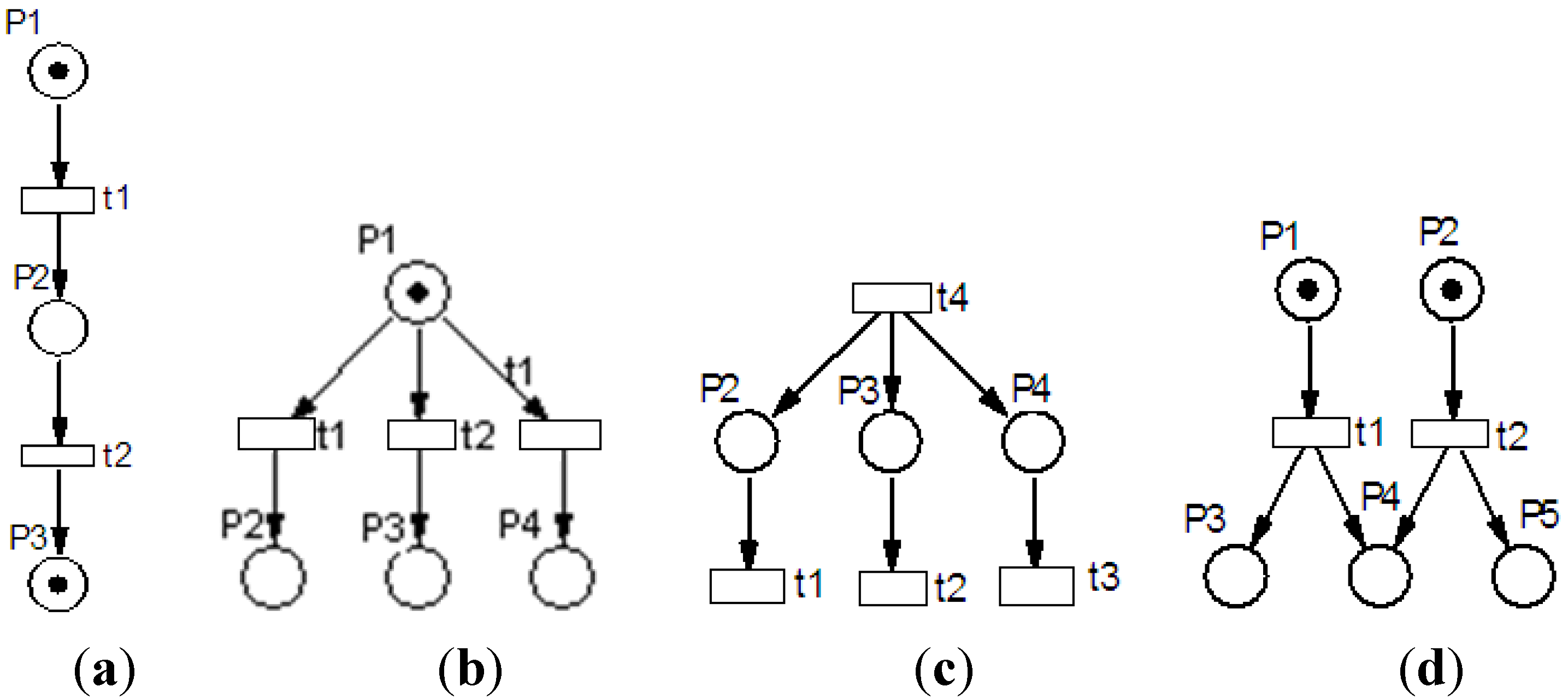
| Logical Relationship | Fault Tree Model | Petri Net Model |
|---|---|---|
| Logic OR Gate |  |  |
| Logic AND Gate |  |  |
| Logic BAN Gate |  |  |
| Logic NOT Gate |  |  |
4.2. Fault Diagnostic Principle Based on Fault Petri Net

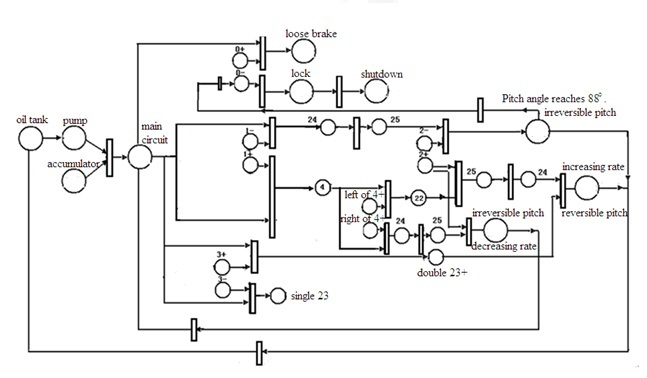
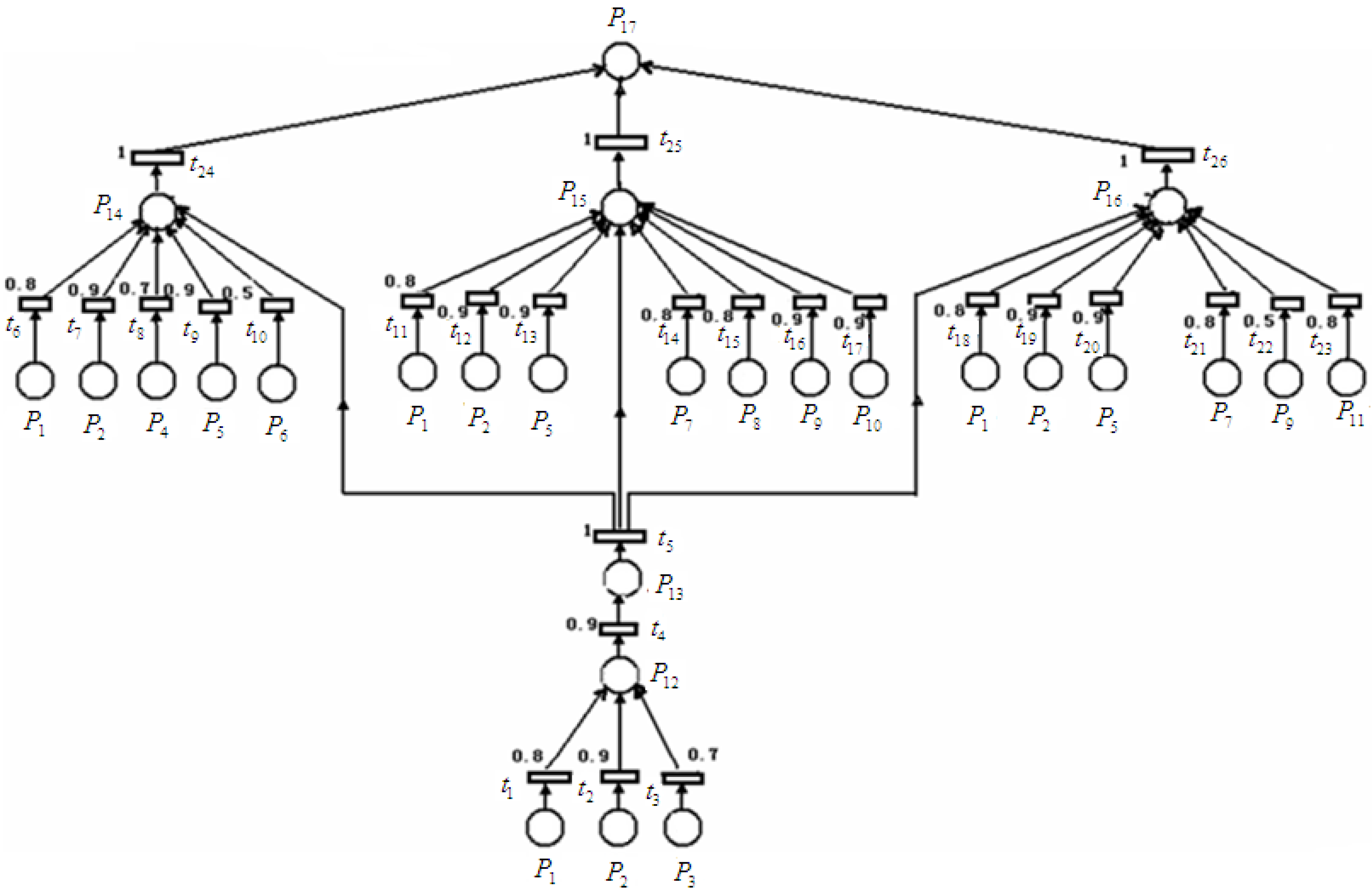
4.3. Modeling of the Fault Petri Net of a Hydraulic Variable Pitch System
| Positions of Bottom Events | Meaning of Positions | Middle Positions | Meaning of Middle Positions |
|---|---|---|---|
| P1 (0.0005) | Hydraulic pump provides less oil | P12 | Pressure of return circuit is not enough, when brake is loosed |
| P2 (0.0005) | Pressure of accumulator is not enough | P13 | The failure of loosing brake |
| P3 (0.06) | Sealing is not good after valve 0 is charged with electricity | P14 | The fault of irreversible pitch on the process of start-up |
| P4 (0.036) | Valve 1 is not charged with electricity or 19.1 leaks oil | P15 | The fault of increasing power or reversible pitch |
| P5 (0.01) | Piston is seriously abraded | P16 | The fault of decreasing power or irreversible pitch |
| P6 (0.036) | Valve 2 is not charged with electricity or 19.2 leaks oil | P17 | The fault of variable pitch for hydraulic variable pitch system |
| P7 (0.05) | The state fault of valve 1 with electricity | ||
| P8 (0.06) | The fault of valve 4 set on shoot-through | ||
| P9 (0.05) | The state fault of valve 2 with electricity | ||
| P10 (0.02) | Valve 3 leaks oil or double 23 is fault | ||
| P11 (0.06) | The state fault of valve 4 set on the cross-modality |
5. Reliability Analysis of a Fault Petri Net
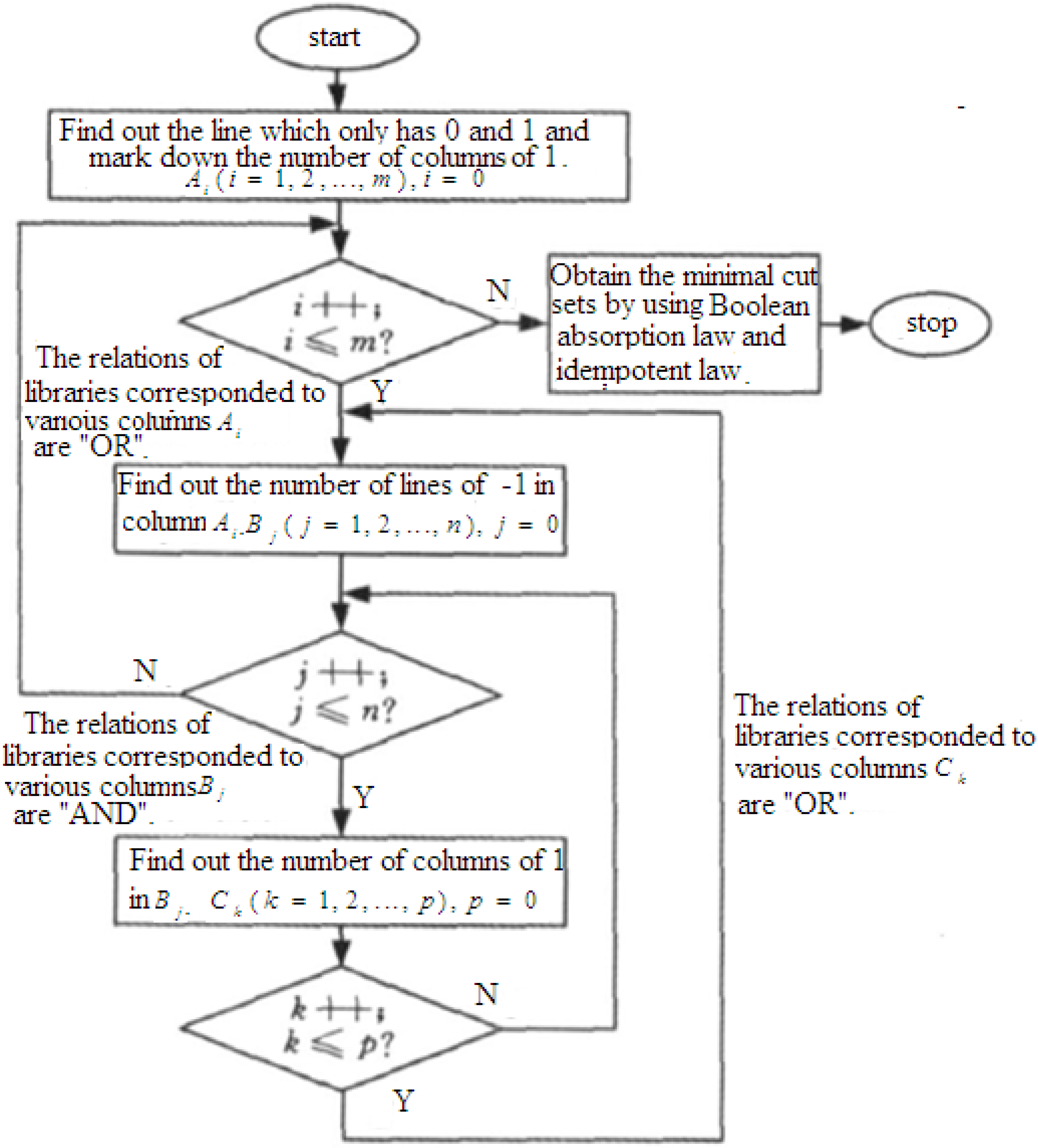
5.1. Qualitative Analysis of a Fault Petri Net





- (1)
- In the incidence matrix, find out the line which contains only 0 s and 1 s without −1 s. Then the library corresponding to that line is the top library. Start to search from this top library.
- (2)
- From 1 in the corresponding line of top library, −1 can be searched by column. Then the library which is represented by the corresponding line of −1s is an input library of the top library. If the column has multiple −1 s, the same transition will have multiple input libraries and these input libraries have an “AND” relationship.
- (3)
- According to the −1 which is searched by step (2), continue to search 1 by line. If there is a 1, the corresponding library is a middle library. Continue to search circularly as in step (2), until no 1s are found in the line. If there is no the line of 1s, the library will be a bottom library called basic event. If there are multiple 1s in a corresponding line, the corresponding library will have multiple transitions. From the corresponding line of 1 as step (2), find out the lines of −1 s. The corresponding libraries of these lines have the relationship of “OR”.
- (4)
- Continue to search as step (2) and step (3), until the most bottom libraries are found.
- (5)
- According to the above relationship of “AND” and “OR”, spread these bottom libraries and then get all cut sets.
- (6)
- Obtain minimum cut sets through Boolean absorption law, idempotent law and prime number method.
- (1)
- Define a planar array to express the incidence matrix;
- (2)
- Transfer recursive function to search −1 by column and 1 by line;
- (3)
- Use a loop statement to express the relationship among cut sets.

5.2. Quantitative Calculation of the Fault Petri Net




6. Conclusions
Acknowledgements
References
- Galdi, V.; Piccolo, A.; Siano, P. Designing an adaptive fuzzy controller for maximum wind energy extraction. IEEE Trans. Energy Convers. 2008, 23, 559–569. [Google Scholar] [CrossRef]
- Calderaro, V.; Galdi, V.; Piccolo, A.; Siano, P. A fuzzy controller for maximum energy extraction from variable speed wind power generation systems. Electr. Power Syst. Res. 2008, 78, 1109–1118. [Google Scholar] [CrossRef]
- Galdi, V.; Piccolo, A.; Siano, P. Exploiting maximum energy from variable speed wind power generation systems by using an adaptive Takagi-Sugeno-Kang fuzzy model. Energy Convers. Manag. 2009, 50, 413–421. [Google Scholar] [CrossRef]
- Ye, H.Y. Actuator of control system. In Control Technology of Wind Turbines; Ye, H.Y., Ed.; China Machine Press: Beijing, China, 2006; Volume 7, pp. 111–131. [Google Scholar]
- Liu, X.; Zhang, X.M. Dynamic simulation of the supervisory control of variable speed pitch regulated wind turbines. Acta Energ. Sol. Sin. 2008, 29, 1008–1013. [Google Scholar]
- Zhao, W.Z.; Qin, L.X.; Yao, X.J. Modeling research of MW wind turbine variable pitch system. Mach. Tool Hydraul. 2006, 6, 157–162. [Google Scholar]
- Georgilakis, P.S.; Katsigiannis, J.A.; Valavanis, K.P.; Souflaris, A.T. A systematic stochastic Petri net based methodology for transformer fault diagnosis and repair actions. J. Intell. Robot. Syst. 2006, 45, 181–201. [Google Scholar] [CrossRef]
- Katsigiannis, Y.A.; Georgilakis, P.S.; Tsinarakis, G.J. A novel colored fluid stochastic Petri net simulation model for reliability evaluation of wind/PV/diesel small isolated power systems. IEEE Trans. Syst. Man Cybern. Syst. Hum. 2010, 40, 1296–1309. [Google Scholar] [CrossRef]
- Wu, Q.D.; Yan, J.W.; Zhang, H. Principle and Practical of Flexible Manufacturing Automation; Wu, Q.D., Yan, J.W., Zhang, H., Eds.; Tsinghua University Press: Beijing, China, 1997. [Google Scholar]
- Ciardo, G.; Trivedi, K.S. A decomposition approach for stochastic Petri net models. In Fourth International Workshop of Petri Nets and Performance Models; Petri Nets and Performance Models: Melbourne, Australia, December 1991; pp. 74–83. [Google Scholar]
- Berthelot, G.; Terrat, R. Petri nets theory for the correctness of protocols. IEEE Trans. Commun. 1982, COM-30, 2497–2505. [Google Scholar]
- Kasai, T.; Miller, R.E. Homomorpisms between models of parallel computation. J. Comput. Syst. Sci. 1982, 25, 285–331. [Google Scholar] [CrossRef]
- Genrich, H.J.; Thiagarajan, P.S. Atheory of bipolar synchronization schemes. Theoret. Comput. Sci. 1984, 30, 241–318. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, W.J.; Sun, B.; Yang, R.Q. Object-oriented and Petri-net based simulation for robotic assembly system. Modul. Mach. Tool Autom. Manuf. Technol. 2002, 2, 5–7. [Google Scholar]
- The Theory of Petri Net; Yuan, C.Y. (Ed.) Electronic Industry Press: Beijing, China, 1998.
- Lin, Y.G.; Li, W. Study on the technology of pitch-control for large scale wind turbines. PhD Thesis, Zhejiang University, Hangzhou, China, 2005. [Google Scholar]
- Wang, S.J.; Su, C.; Xu, Y.Q. Research on a hydraulic system’s reliability based on stochastic Petri net and Monte Carlo simulation. Mech. Sci. Technol. 2006, 10, 1206–1209. [Google Scholar]
- Allard, B.; Morel, H.; Chante, J.P. Power electronic circuit simulation using bond graph and Petri network techniques. In Proceedings of the IEEE Annual Power Electronics Specialists Conference, Seattle, WA, USA, June 1993; pp. 27–32.
- Portinale, L. Petri net reachability analysis meets model-based diagnosis and problem solving. In Proceeding of the IEEE International Conference on Systems, Man and Cybernetics, SMC 95, Vancouver, Canada, October 1995; pp. 1712–1717.
- Su, C.; Shen, G.; Xu, Y.Q. Failure analysis and reliability evaluation of mono-bucket excavator’s hydraulic system. Lift. Transp. Mach. 2007, 1, 10–15. [Google Scholar]
- Application of Petri Net in Modelling and Control of Manufacturing System; Jiang, Z.B. (Ed.) China Machine Press: Beijing, China, 2004.
- Wang, H.Q. System reliability analysis based on Petri net. Beijing Inst. Light Ind. 1998, 16, 87–93. [Google Scholar]
- Liu, T.S.; Choiu, S.B. The Application of Petri Nets to Failure Analysis. Reliab. Eng. Syst. Saf. 1997, 57, 129–142. [Google Scholar] [CrossRef]
© 2011 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Yang, X.; Li, J.; Liu, W.; Guo, P. Petri Net Model and Reliability Evaluation for Wind Turbine Hydraulic Variable Pitch Systems. Energies 2011, 4, 978-997. https://doi.org/10.3390/en4060978
Yang X, Li J, Liu W, Guo P. Petri Net Model and Reliability Evaluation for Wind Turbine Hydraulic Variable Pitch Systems. Energies. 2011; 4(6):978-997. https://doi.org/10.3390/en4060978
Chicago/Turabian StyleYang, Xiyun, Jinxia Li, Wei Liu, and Peng Guo. 2011. "Petri Net Model and Reliability Evaluation for Wind Turbine Hydraulic Variable Pitch Systems" Energies 4, no. 6: 978-997. https://doi.org/10.3390/en4060978