Harmonic Loss Analysis of the Traction Transformer of High-Speed Trains Considering Pantograph-OCS Electrical Contact Properties

Abstract
:
1. Introduction
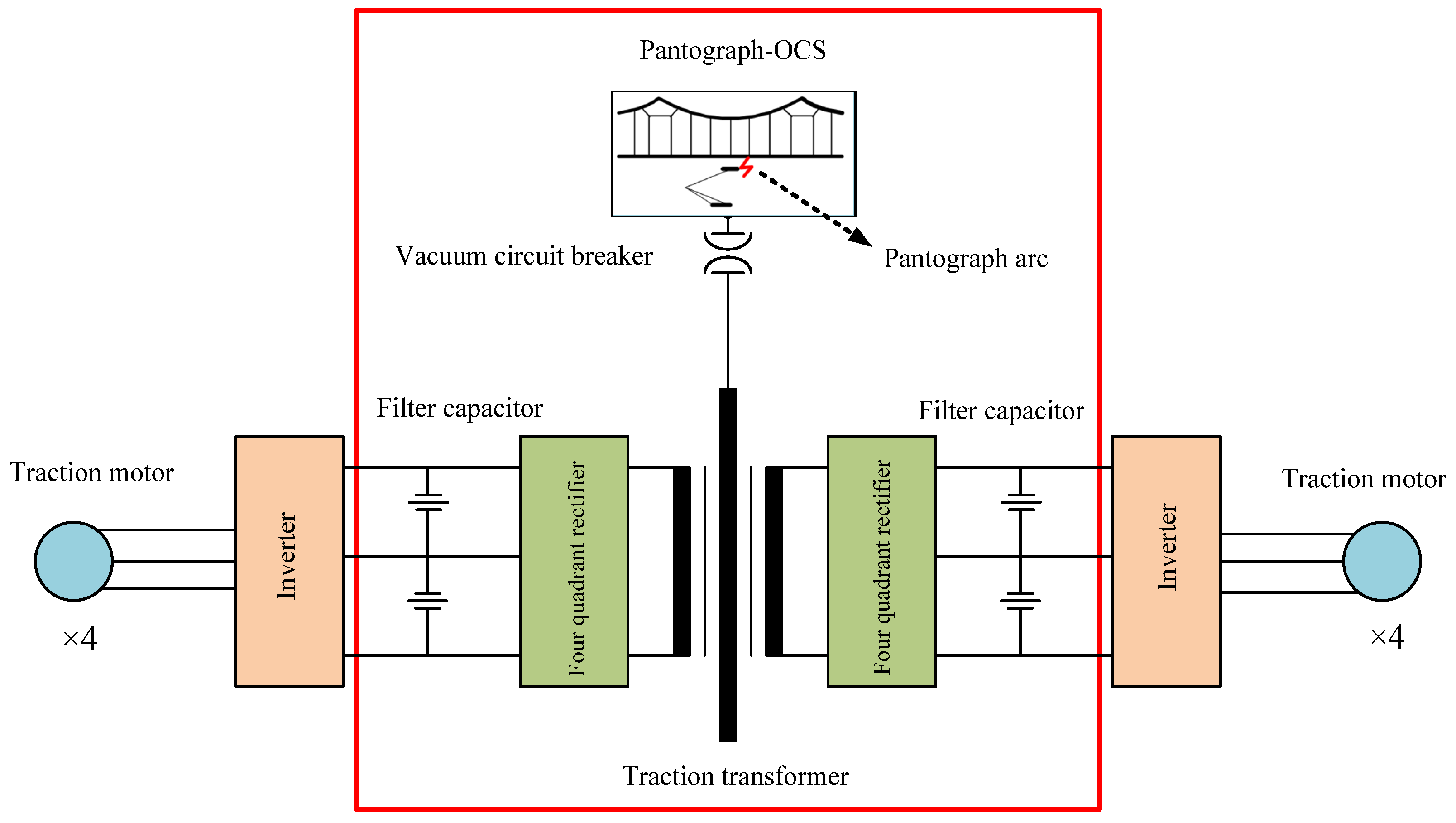
2. Analysis of the Traction Drive System

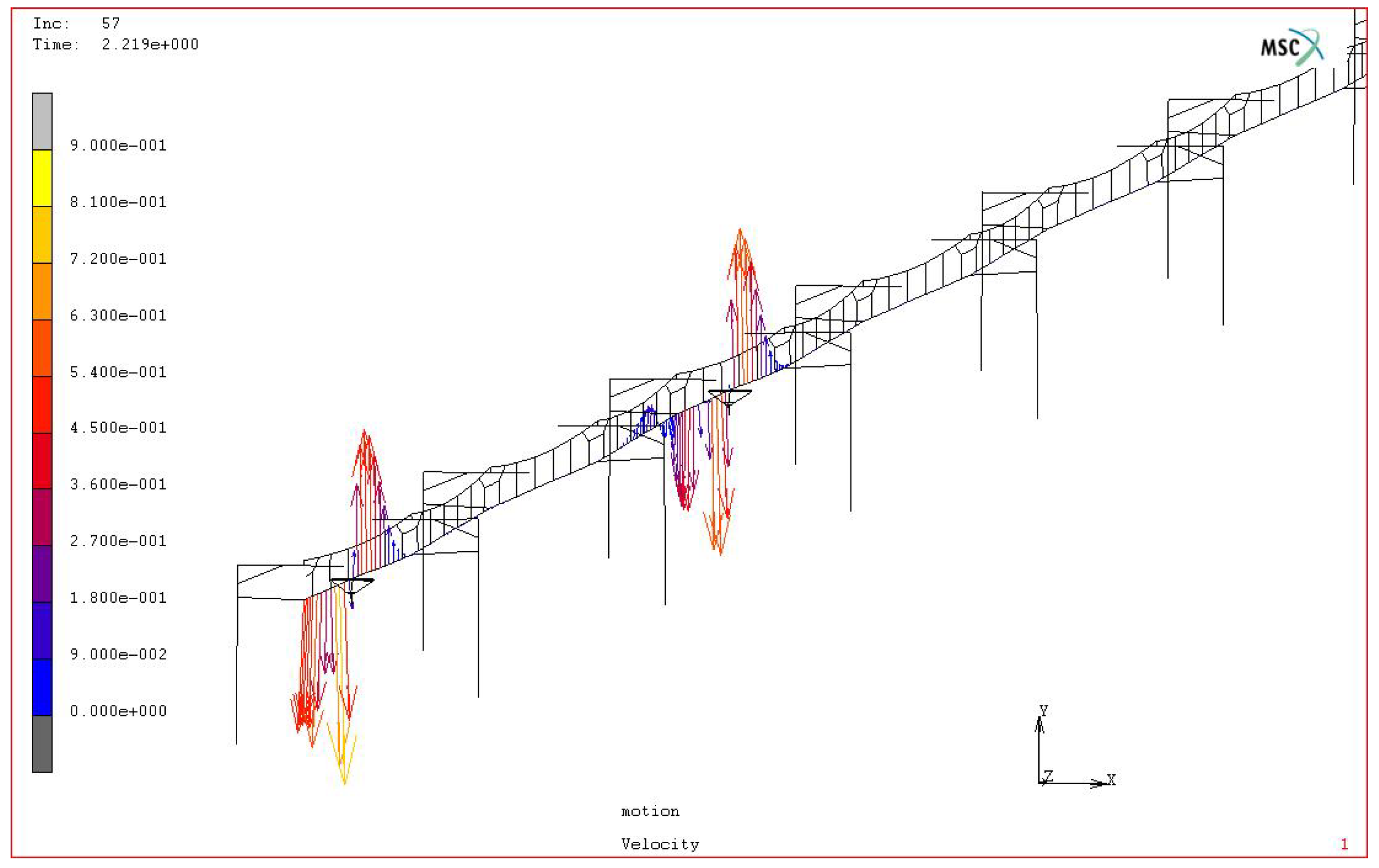
2.1. Pantograph-OCS
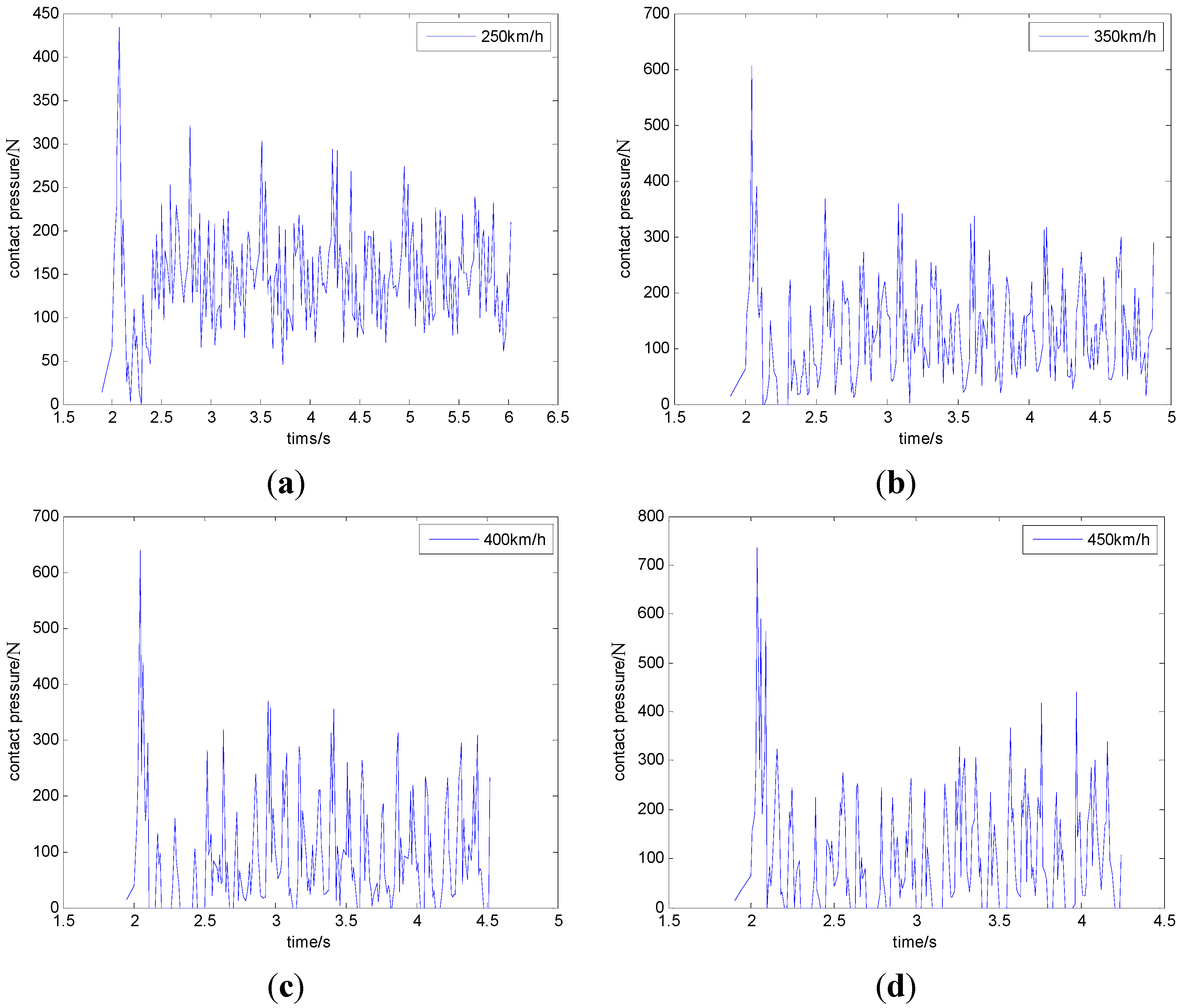
2.1.1. Disconnection Events

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Speed (km/h) | tloss (s) | tcontact (s) | ttotal (s) | Ratio of disconnection ploss |
|---|---|---|---|---|
| 250 | 0.018 | 4.112 | 4.13 | 0.44% |
| 350 | 0.1029 | 2.8771 | 2.98 | 3.45% |
| 400 | 0.5513 | 2.0187 | 2.57 | 21.45% |
| 450 | 0.67 | 1.67 | 2.34 | 28.63% |
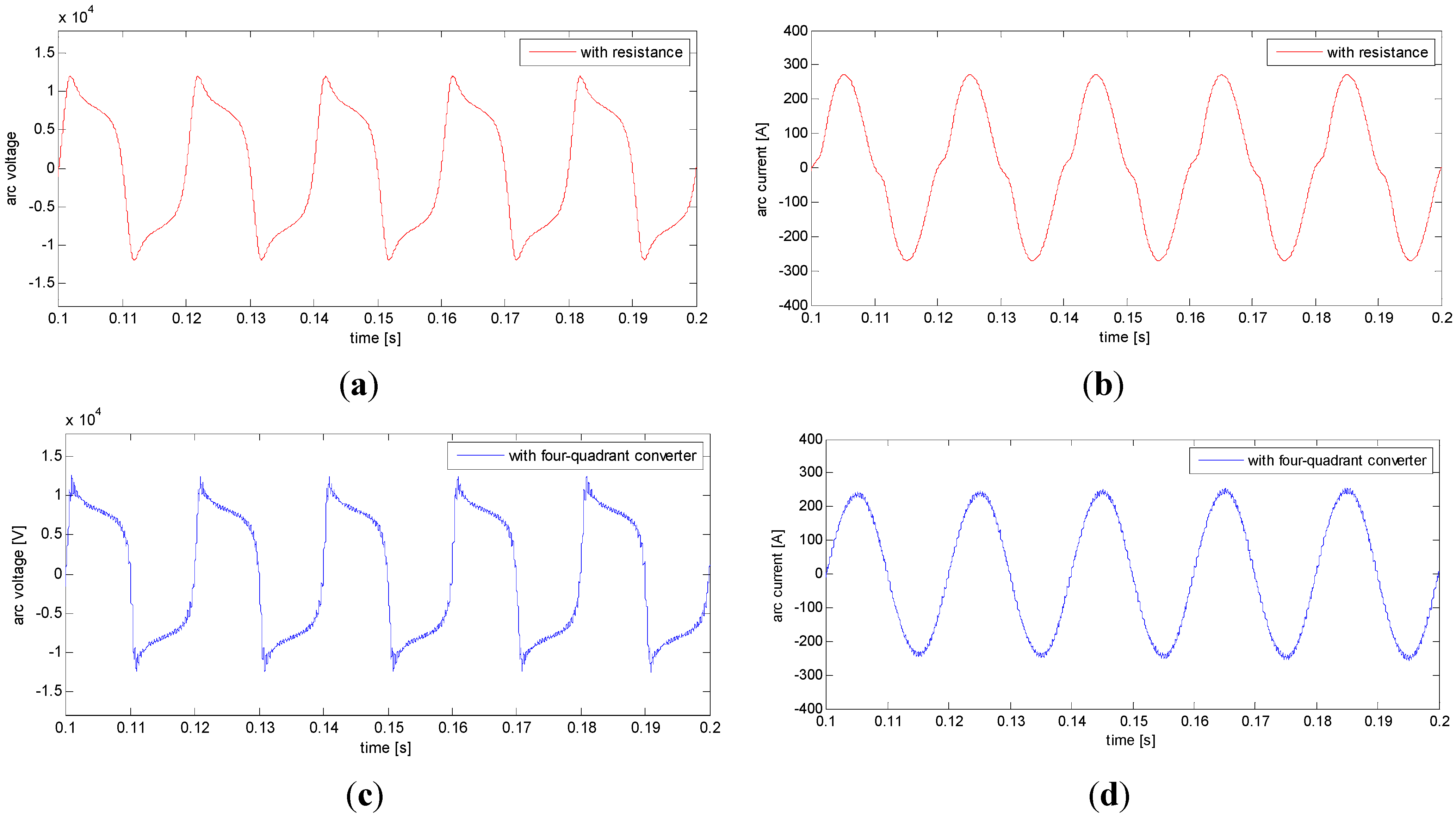
2.1.2. Pantograph Arc Model
2.2. Traction Transformer
| Parameters | Primary winding | Traction winding |
|---|---|---|
| Capacity (kVA) | 3855 | 1667.5 |
| Rated voltage (V) | 25000 | 1658 |
| Rated current (A) | 154 | 1006×2 |
| Frequency (Hz) | 50 | |
| Efficiency | 95% | |
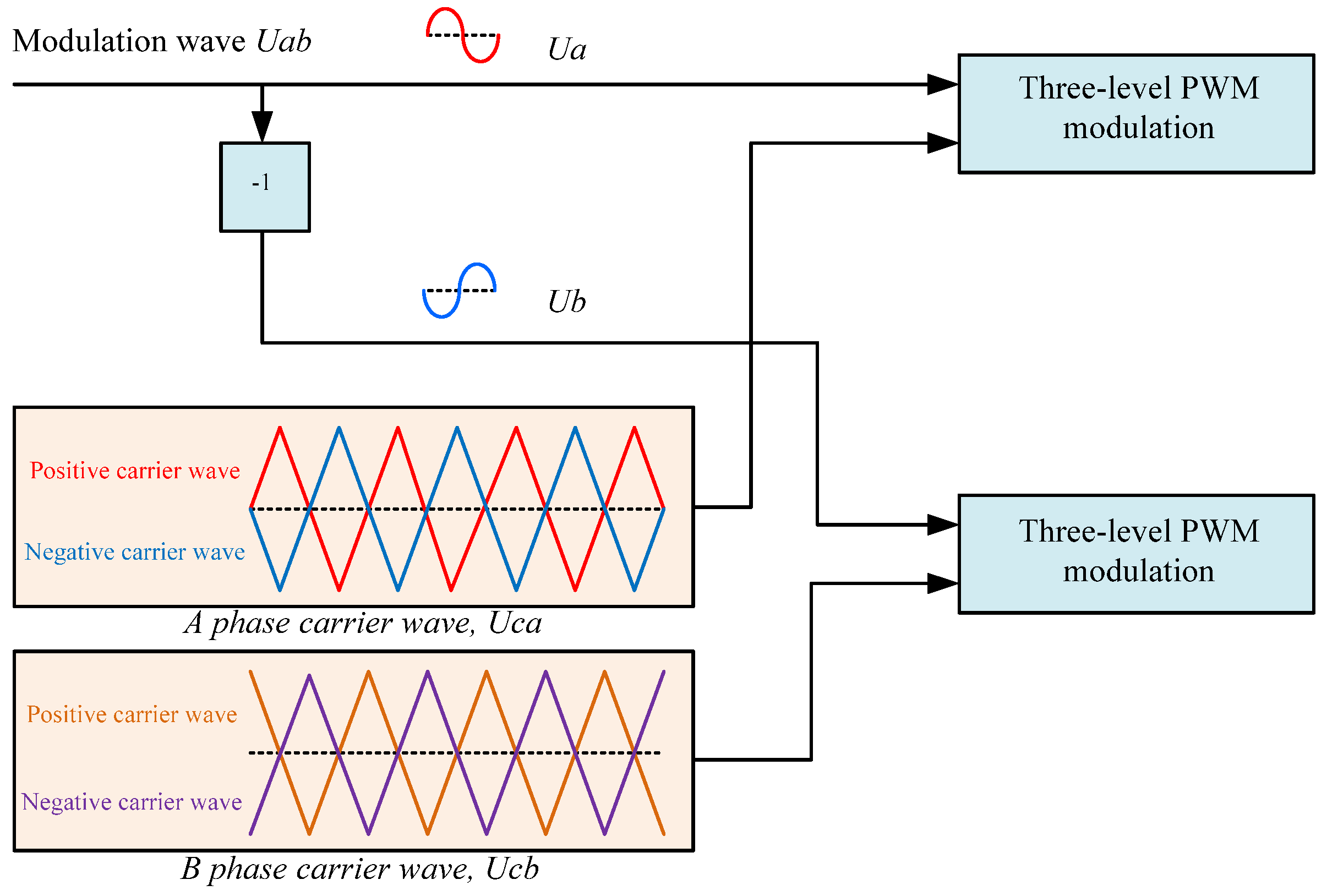
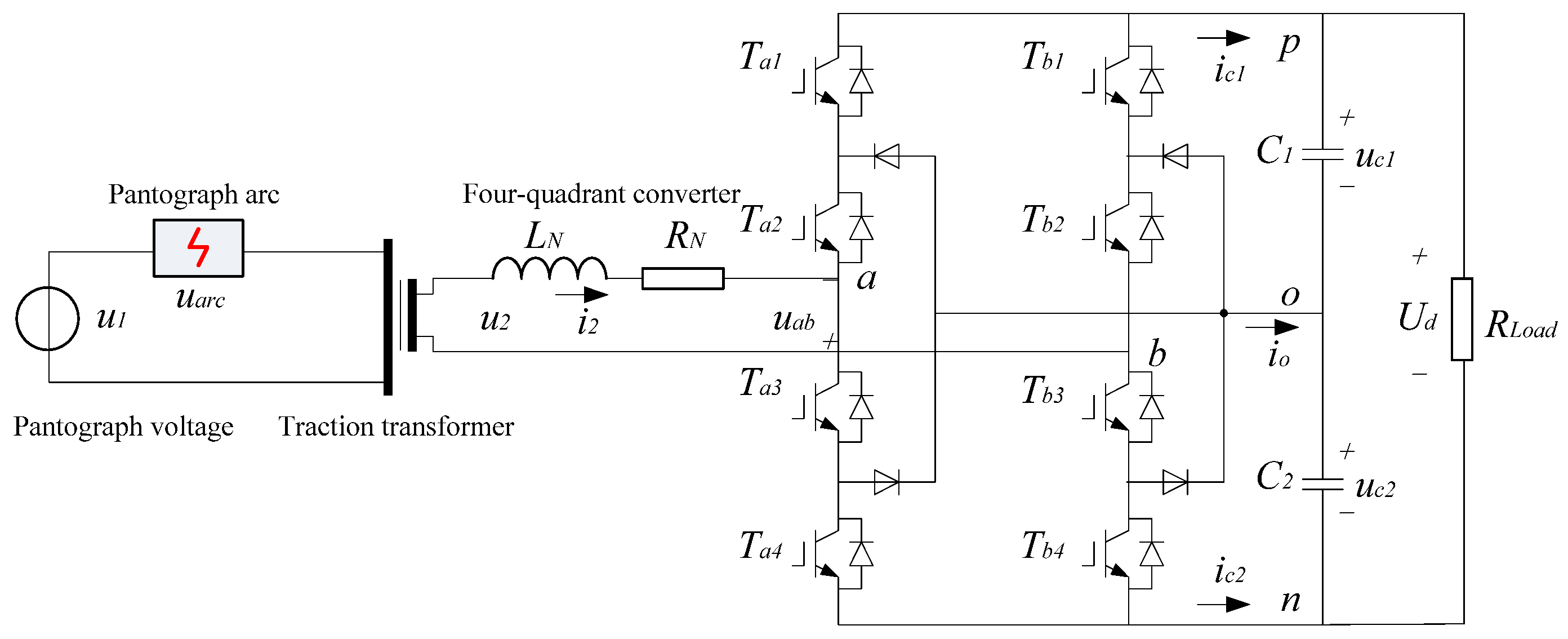
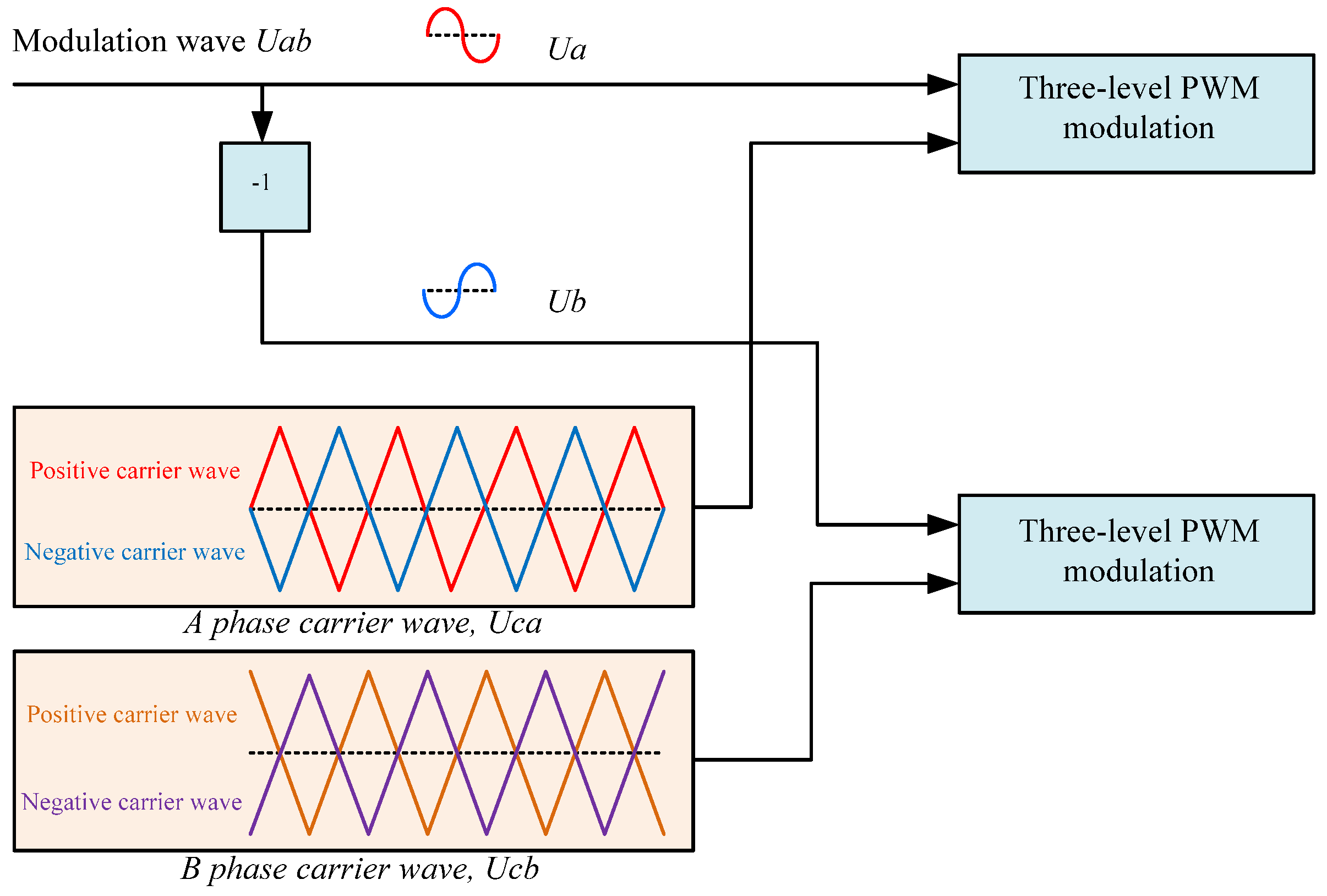
2.3. Four-Quadrant Converter
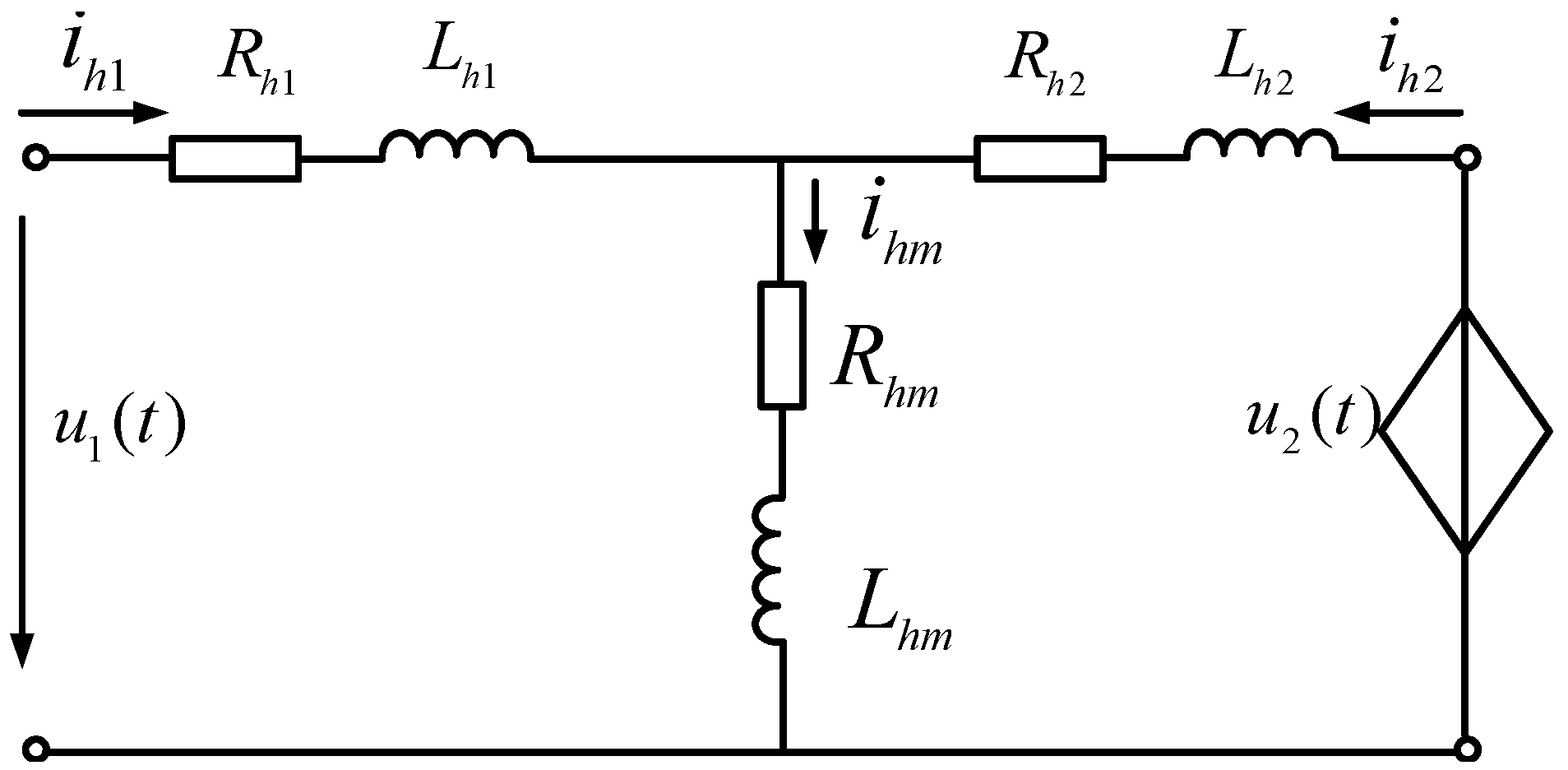
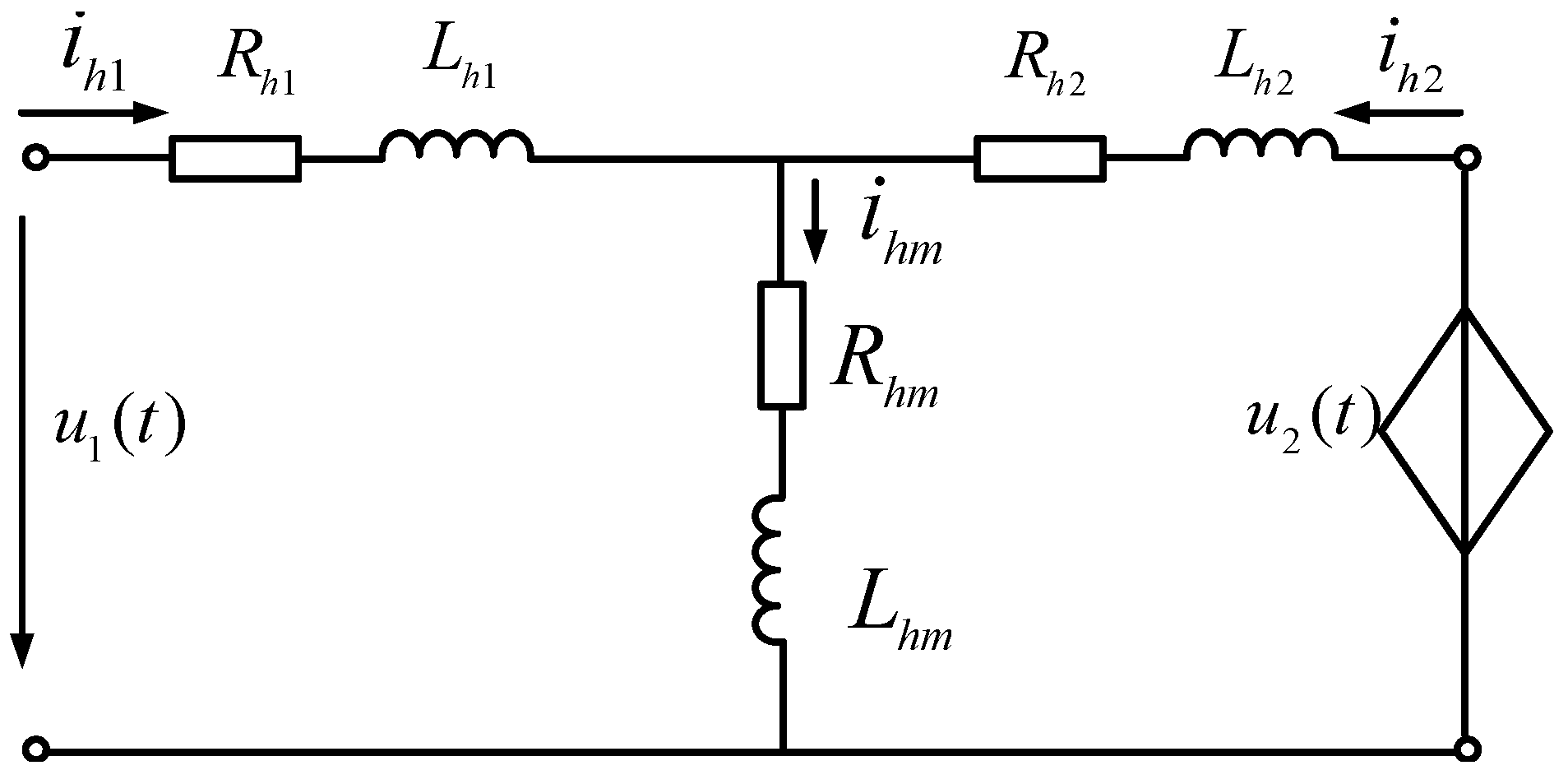
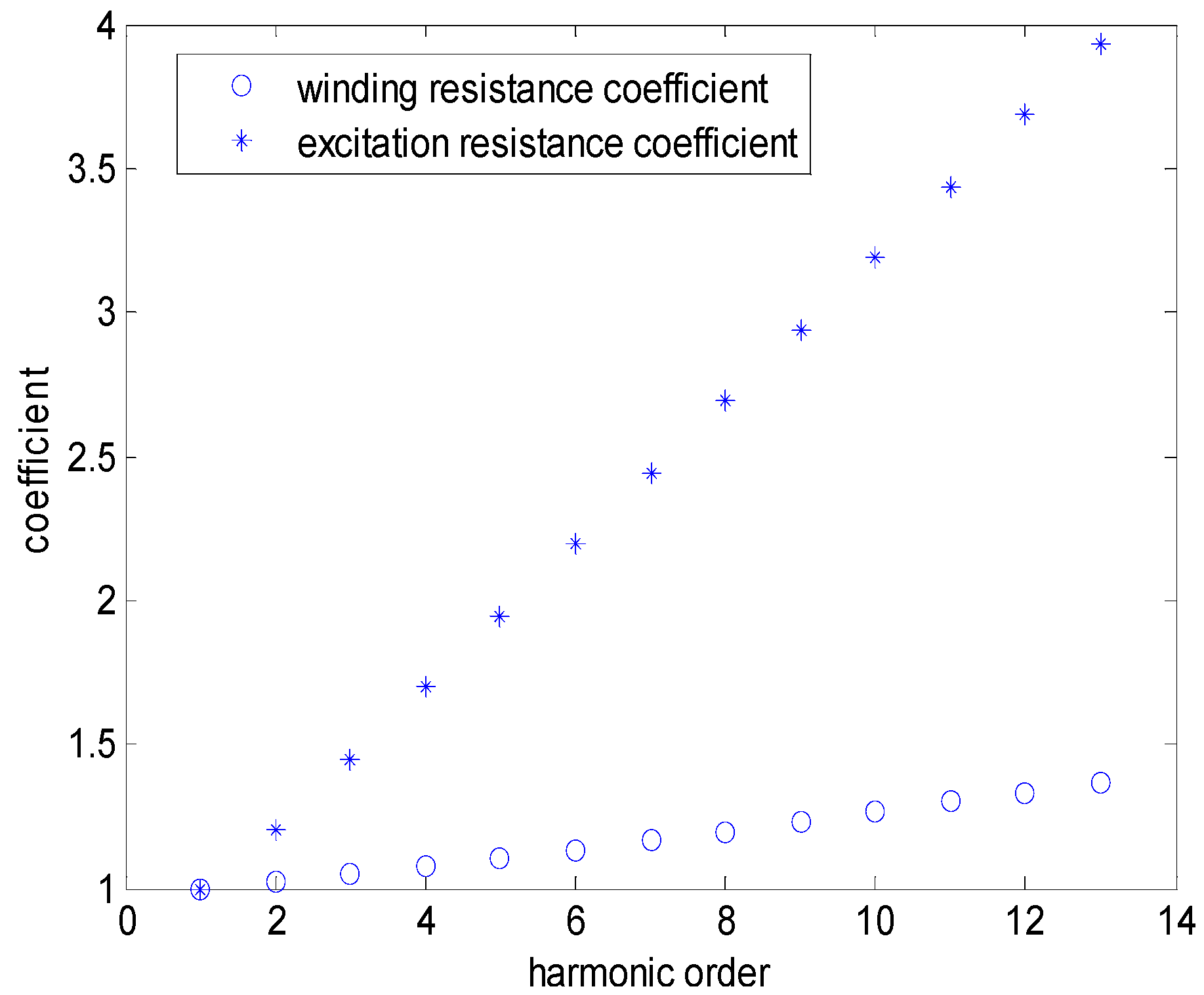
3. Harmonic Loss of Transformer
4. Results and Discussion
4.1. Harmonic Loss Calculation



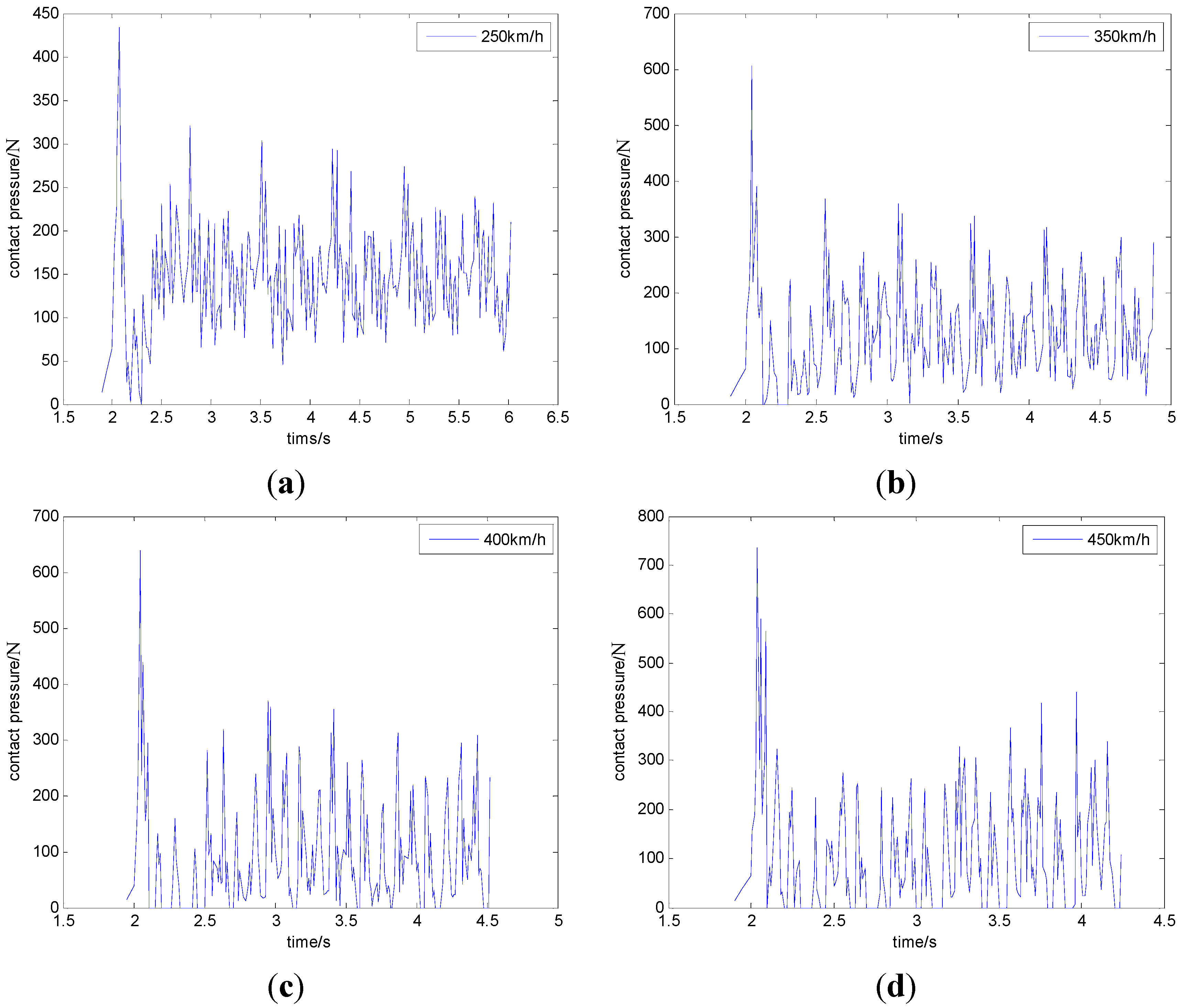
4.2. Effects of Disconnection Events
5. Conclusions
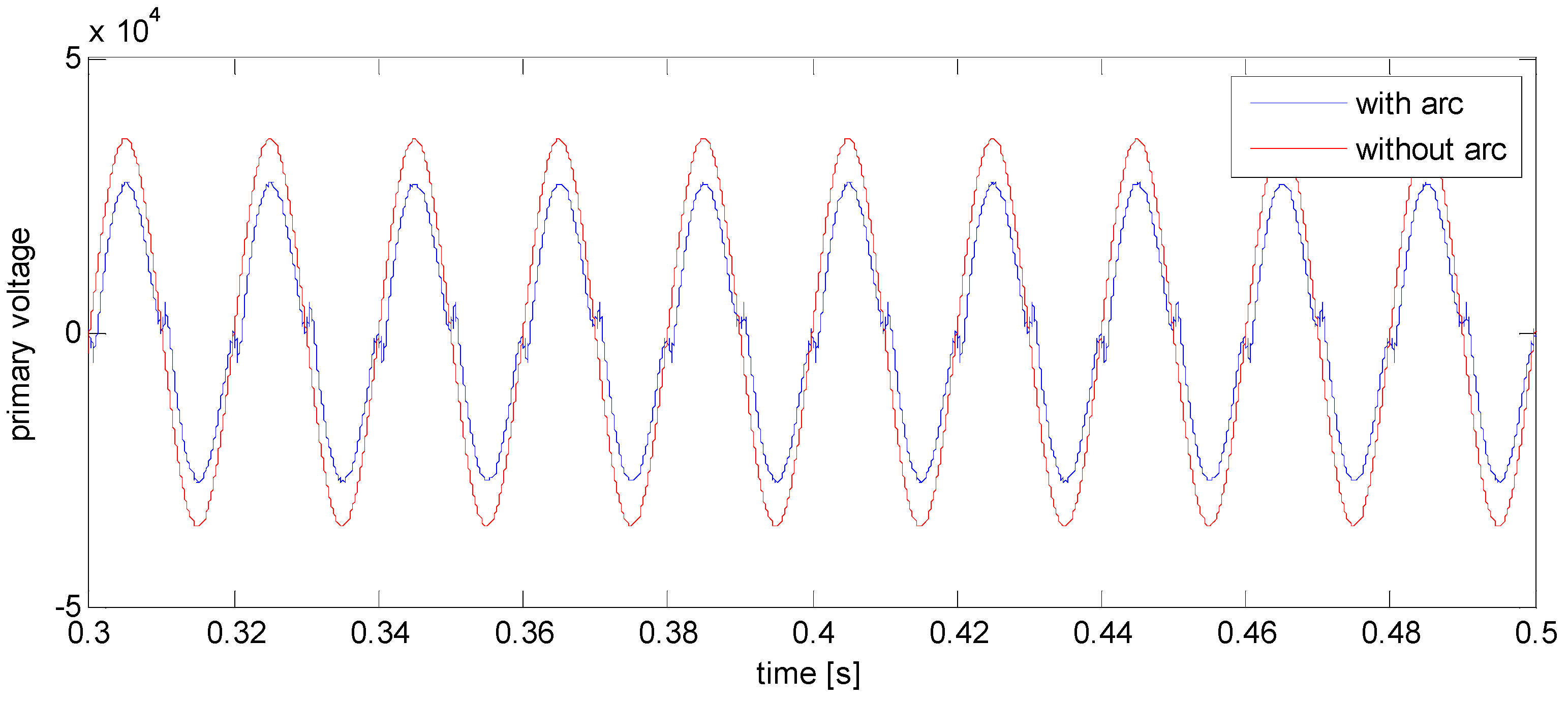
- (1)
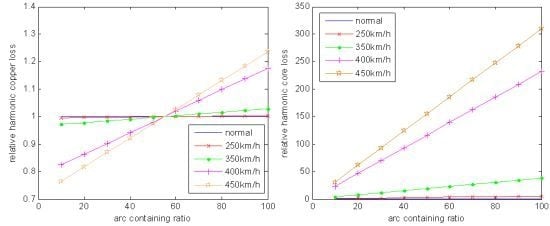
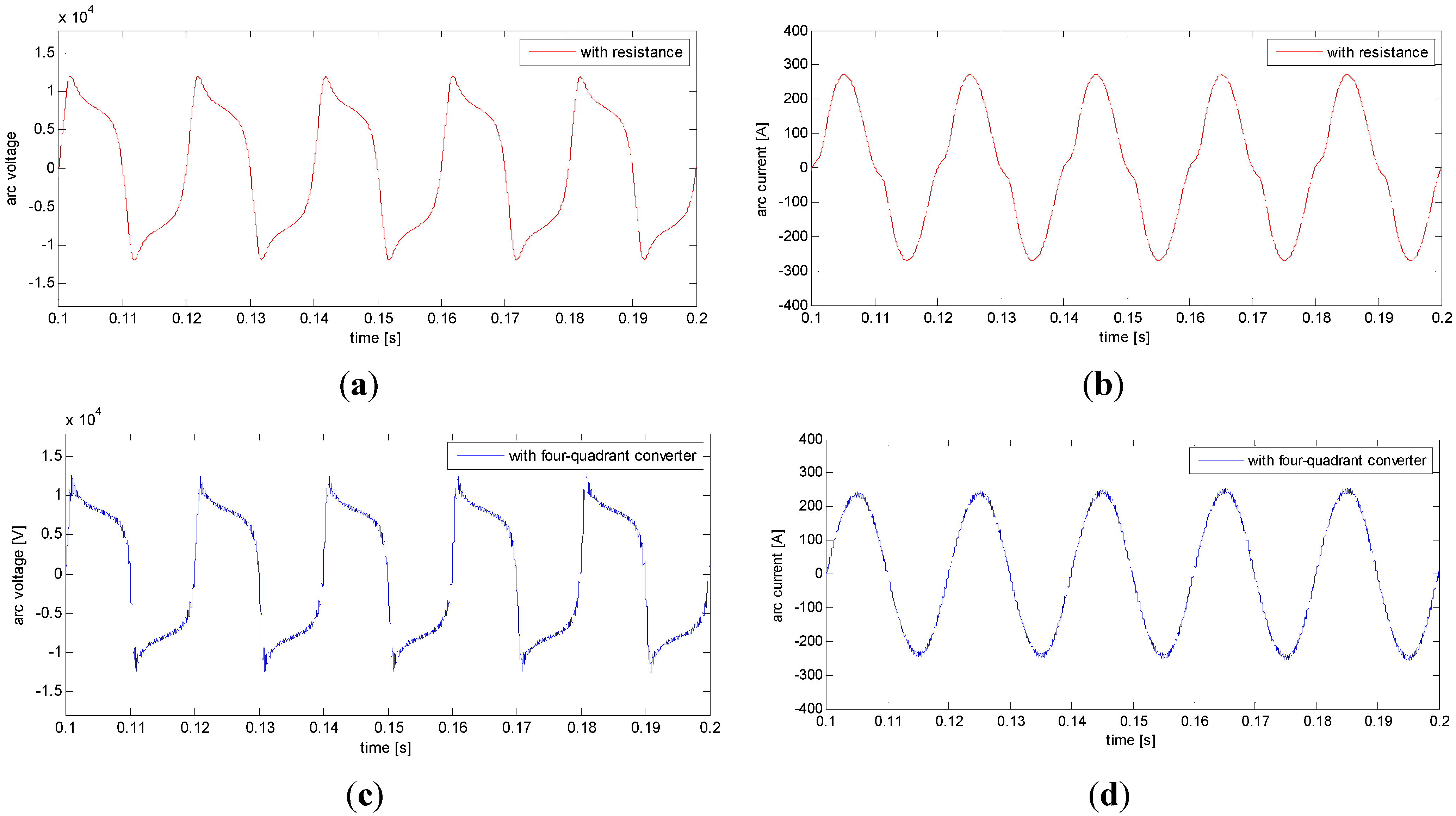
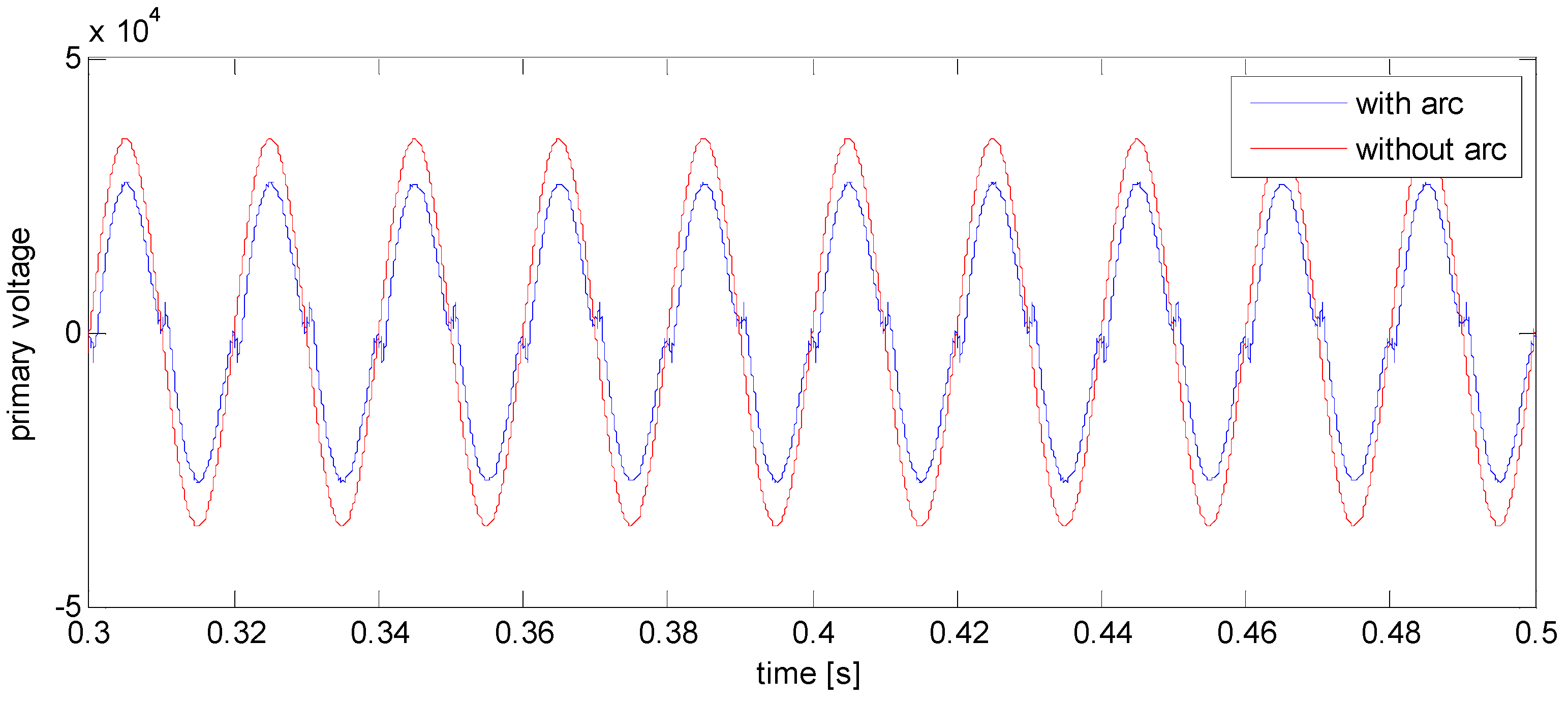
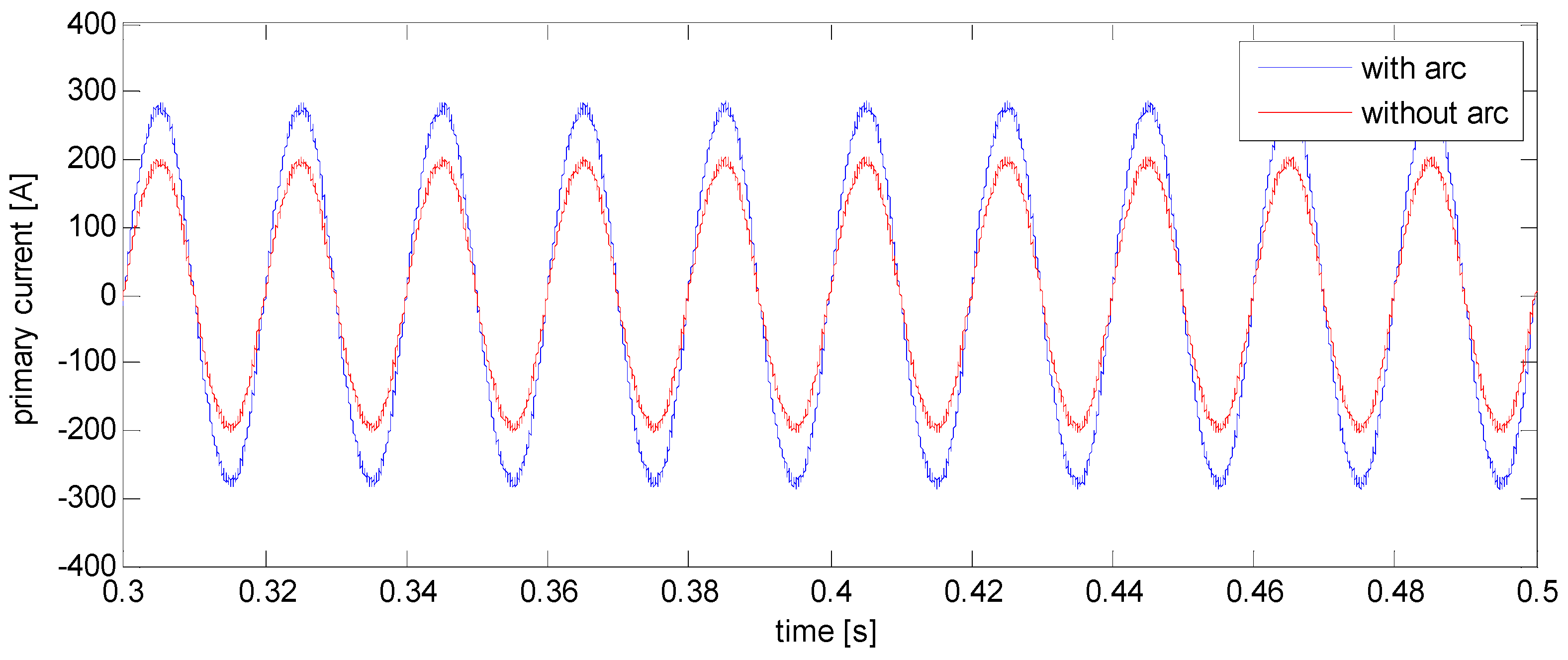
- The increasing pantograph arc voltage leads to decreasing primary voltage and increasing primary current; this will lead to both increasing harmonic copper losses and harmonic core losses.
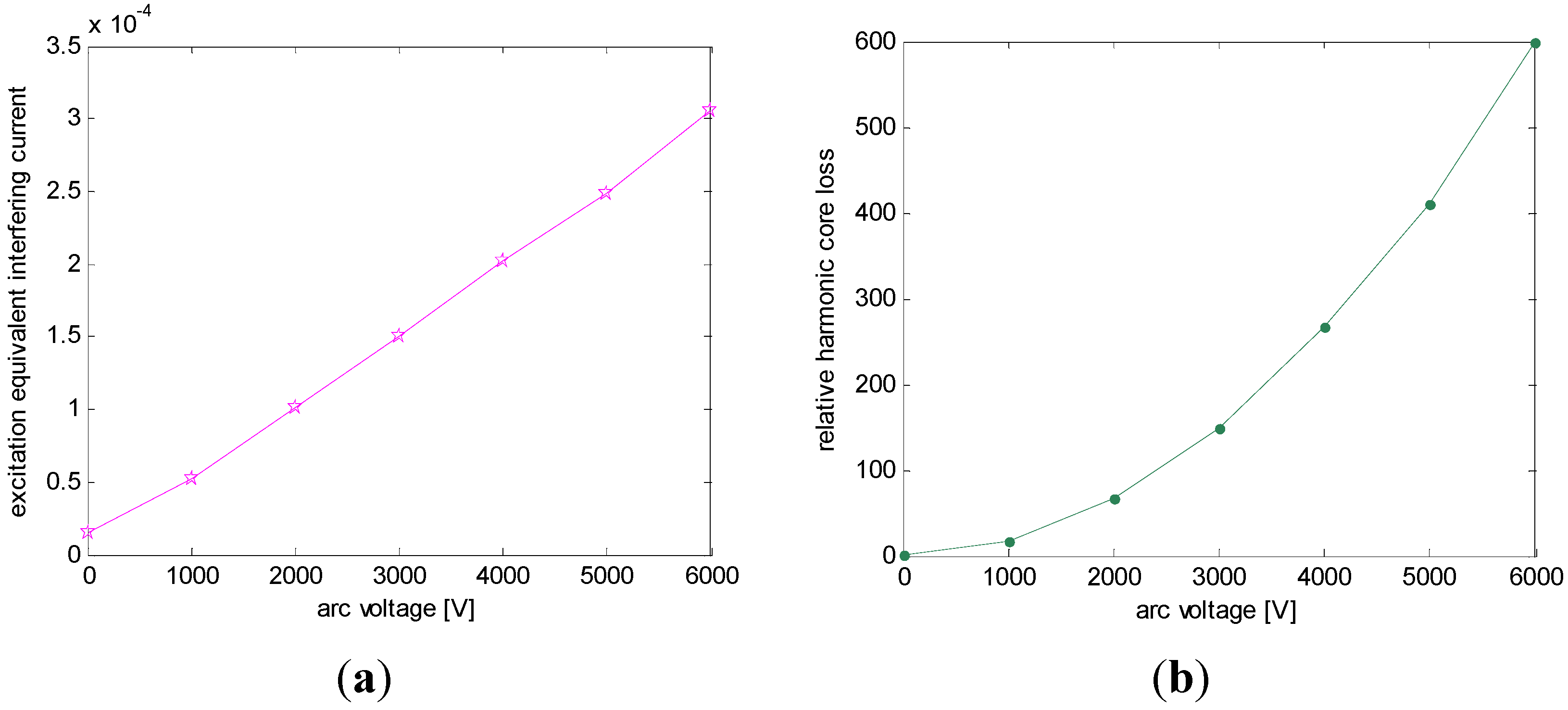
- (2)
- The effects of pantograph arcs on the primary and secondary equivalent interfering current are irregular, but the excitation equivalent interfering current is increasing with the rising arc voltage.
- (3)
- The harmonic copper loss with arc in the circuit can reach almost two times that without arc. The harmonic core loss with arc is increased significantly compared with that without arc.
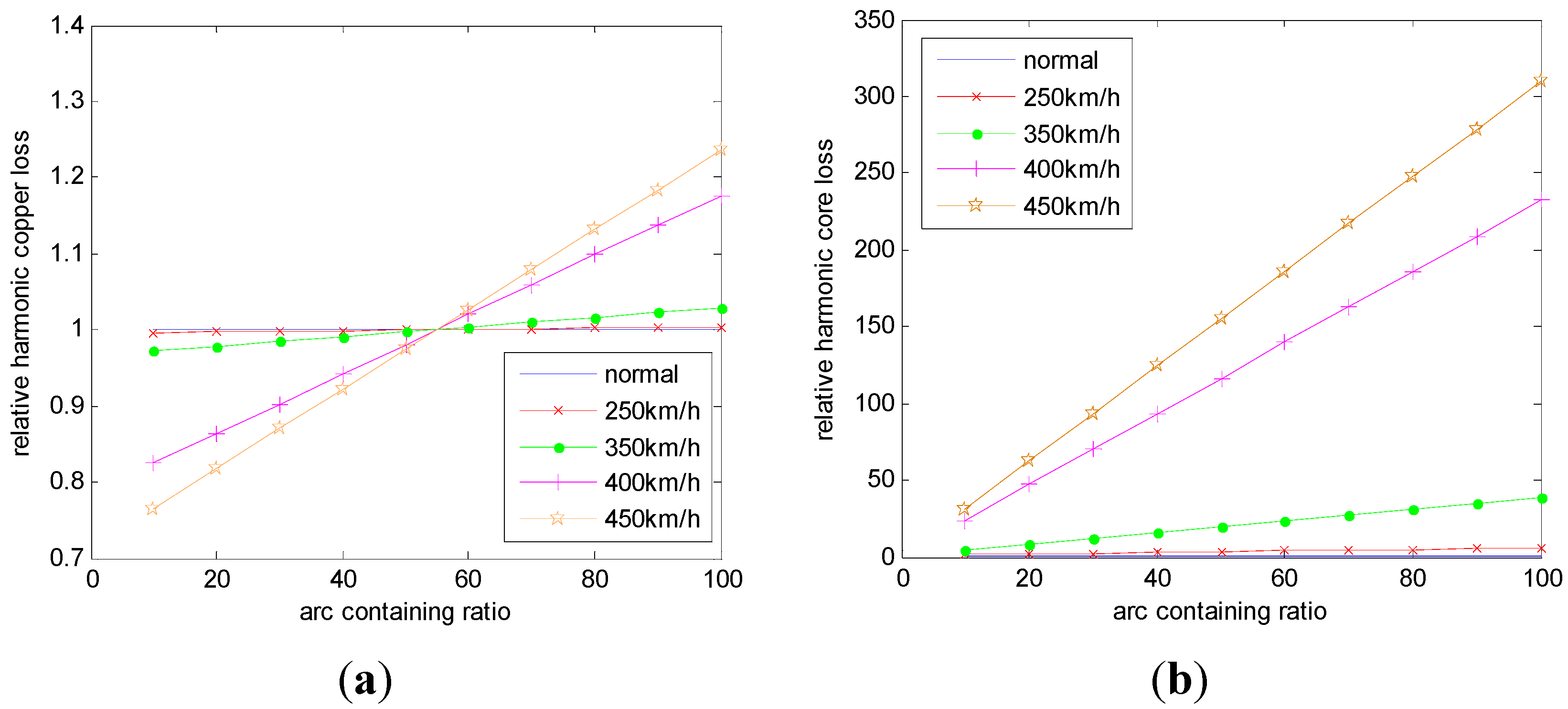
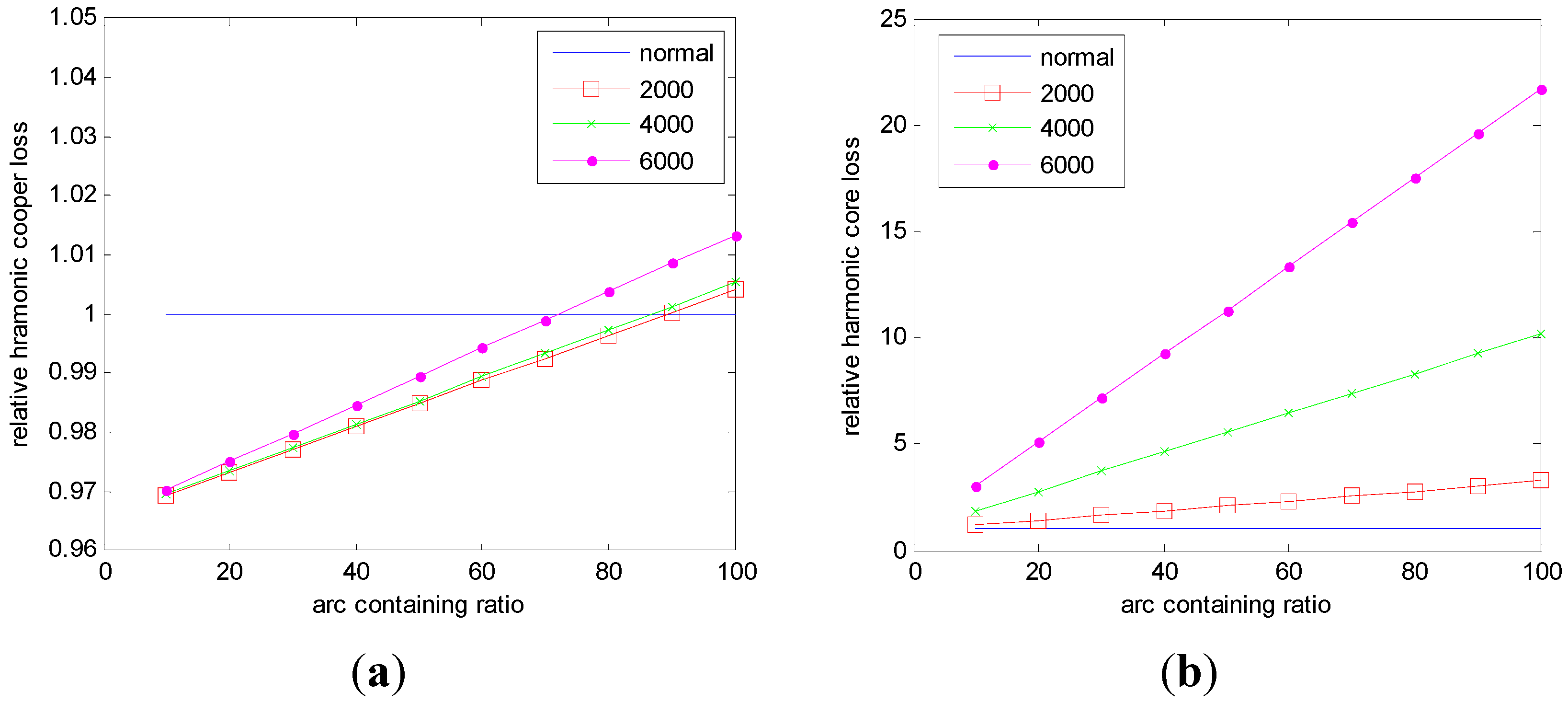
- (4)
- The average harmonic loss is rising with the growing arc containing ratio and the rising arc voltage. The average harmonic copper loss may be less than that without arc while the arc containing ratio is small. The average harmonic core loss is always larger than that without arc.
Acknowledgments
Conflicts of Interest
References
- China South Locomotive and Rolling Stock Corporation Limited Web Page. High-speed EMU of CRH380A. 16 March 2011. Available online: http://www.csrgc.com.cn/cns/cpyfw/dcz/2011-03-16/3921.shtml (accessed on 31 October 2013).
- Bormann, D.; Midya, S.; Thottappillil, R. DC Component in Pantograph Arcing: Mechanisms and Influence of Various Parameters. In Proceedings of the 18th International Zurich Symposium on Electromagnetic Compatibility (EMC Zurich 2007), Munich, Germany, 24–28 September 2007; pp. 369–372.
- Midya, S.; Bormann, D.; Schutte, T.; Thottappillil, R. Pantograph arcing in electrified railways—Mechanism and influence of various parameters—Part I: With DC traction power supply. IEEE Trans. Power Deliv. 2009, 24, 1931–1939. [Google Scholar] [CrossRef]
- Midya, S.; Bormann, D.; Schutte, T.; Thottappillil, R. Pantograph arcing in electrified railways—Mechanism and influence of various parameters—Part II: With AC traction power supply. IEEE Trans. Power Deliv. 2009, 24, 1940–1950. [Google Scholar] [CrossRef]
- Midya, S.; Bormann, D.; Schutte, T.; Thottappillil, R. DC component from pantograph arcing in AC traction system—Influencing parameters, impact, and mitigation techniques. IEEE Trans. Electromagn. Compat. 2011, 53, 18–27. [Google Scholar] [CrossRef]
- Mayuri, R.; Sinnou, N.R.; Ilango, K. Eddy Current Loss Modeling in Transformer Iron Losses Operated by PWM Inverter. In Proceedings of the 2010 Joint International Conference on Power Electronics, Drives and Energy Systems (PEDES) & 2010 Power India, New Delhi, India, 20–23 December 2010; pp. 1–5.
- Liu, R.; Mi, C.C.; Gao, D.W. Modeling of eddy-current loss of electrical machines and transformers operated by pulsewidth-modulated inverters. IEEE Trans. Magn. 2008, 44, 2021–2028. [Google Scholar] [CrossRef]
- Yazdani-Asrami, M.; Mirzaie, M.; Akmal, A.A.S. Investigation on Impact of Current Harmonic Contents on the Distribution Transformer Losses and Remaining Life. In Proceedings of the 2010 IEEE International Conference on Power and Energy (PECon), Kuala Lumpur, Malaysia, 29 November–1 December 2010; pp. 689–694.
- Forrest, J.A.C. Harmonic load losses in HVDC converter transformers. IEEE Trans. Power Deliv. 1991, 6, 153–157. [Google Scholar] [CrossRef]
- Soualmi, A.; Dubas, F.; Depernet, D.; Randria, A.; Espanet, C. Study of Copper Losses in the Stator Windings and PM Eddy-Current Losses for PM Synchronous Machines Taking into Account Influence of PWM Harmonics. In Proceedings of the 2012 15th International Conference on Electrical Machines and Systems (ICEMS), Sapporo, Japan, 21–24 October 2012; pp. 1–5.
- Fu, R.; Dou, M. Research on Rotor Harmonic Copper Losses of Line-start REPMSM Based on FEM. In Proceedings of the 2008 International Conference on Electrical Machines and Systems (ICEMS 2008), Wuhan, China, 17–20 October 2008; pp. 3085–3089.
- Elmoudi, A.; Lehtonen, M.; Nordman, H. Corrected Winding Eddy-Current Harmonic Loss Factor for Transformers Subject to Nonsinusoidal Load Currents. In Proceedings of the 2005 IEEE Russia Conference on Power Tech, St. Petersburg, Russia, 27–30 June 2005; pp. 1–6.
- Ma, X.J.; Jiang, Y. Study on Eddy Current Loss of Core Tie-Plate in Power Transformers. In Proceedings of the 2010 Asia-Pacific Power and Energy Engineering Conference (APPEEC), Chengdu, China, 28–31 March 2010.
- Milagre, A.M.; Ferreira da Luz, M.V.; Cangane, G.M.; Komar, A.; Avelino, P.A. 3D Calculation and Modeling of Eddy Current Losses in a Large Power Transformer. In Proceedings of the 2012 20th International Conference on Electrical Machines (ICEM), Marseille, France, 2–5 September 2012; pp. 2282–2286.
- Li, Y.; Eerhemubayaer.; Sun, X.; Jing, Y.T.; Li, J. Calculation and Analysis of 3-D Nonlinear Eddy Current Field and Structure Losses in Transformer. In Proceedings of the 2011 International Conference on Electrical Machines and Systems (ICEMS), Beijing, China, 20–23 August 2011; pp. 1–4.
- Zhang, Y.; Yan, B.; Cao, F.; Xie, D.; Zeng, L. Analysis of Eddy Current Loss and Local Overheating in Oil Tank of a Large Transformer Using 3-D FEM. In Proceedings of the 2011 International Conference on Electrical Machines and Systems (ICEMS), Beijing, China, 20–23 August 2011; pp. 1–4.
- Da luz, M.V.F.; Leite, J.V.; Benabou, A.; Sadowski, N. Three-phase transformer modeling using a vector hysteresis model and including the eddy current and the anomalous losses. IEEE Trans. Magn. 2010, 46, 3201–3204. [Google Scholar] [CrossRef]
- Makram, E.B.; Thompson, R.L.; Girgis, A.A. A new laboratory experiment for transformer modeling in the presence of harmonic distortion using a computer controlled harmonic generator. IEEE Trans. Power Syst. 1988, 3, 1857–1863. [Google Scholar] [CrossRef]
- Park, T.J.; Han, C.S.; Jang, J.H. Dynamic sensitivity analysis for pantograph of a high-speed rail vehicle. J. Sound Vib. 2003, 266, 235–260. [Google Scholar] [CrossRef]
- Zhou, N.; Zhang, W. Investigation on dynamic performance and parameter optimization design of pantograph and catenary system. Finite Elem. Anal. Des. 2011, 47, 288–295. [Google Scholar] [CrossRef]
- Cho, Y.H.; Lee, K.; Park, Y.; Kang, B.; Kim, K.N. Influence of contact wire pre-sag on the dynamics of pantograph-railway catenary. Int. J. Mech. Sci. 2010, 52, 1471–1490. [Google Scholar] [CrossRef]
- Guardado, J.L.; Maximov, S.G.; Melgoza, E.; Naredo, J.L.; Moreno, P. An improved arc model before current zero based on the combined Mayr and Cassie arc models. IEEE Trans. Power Deliv. 2005, 20, 138–142. [Google Scholar] [CrossRef]
- Liu, Y.J.; Chang, G.W.; Huang, H.M. Mayr’s equation-based model for pantograph arc of high-speed railway traction system. IEEE Trans. Power Deliv. 2010, 25, 2025–2027. [Google Scholar] [CrossRef]
- Wu, X.X.; Li, Z.B.; Tian, Y.; Mao, W.J.; Xie, X. Investigate on the Simulation of Black-Box Arc Model. In Proceedings of the 2011 1st International Conference on Electric Power Equipment—Switching Technology (ICEPE-ST), Xi’an, China, 23–27 October 2011; pp. 629–636.
- Bizjak, G.; Zunko, P.; Povh, D. Circuit breaker model for digital simulation based on Mayr’s and Cassie’s differential arc equations. IEEE Trans. Power Deliv. 1995, 10, 1310–1315. [Google Scholar] [CrossRef]
- Habedank, U. On the mathematical description of arc behavior in the vicinity of current zero. EtzArchiv Elektrotech. Bd 1988, 10, 339–343. [Google Scholar]
- Parizad, A.; Baghaee, H.R.; Tavakoli, A.; Jamali, S. Optimization of Arc Models Parameters Using Genetic Algorithm. In Proceedings of the 2009 International Conference on Electric Power and Energy Conversion Systems (EPECS’09), Sharjah, United Arab Emirates, 10–12 November 2009; pp. 1–7.
- Tseng, K.J.; Wang, Y.M.; Vilathgamuwa, D.M. An experimentally verified hybrid Cassie-Mayr electric arc model for power electronics simulations. IEEE Trans. Power Electron. 1997, 12, 429–436. [Google Scholar] [CrossRef]
- Habedank, U. Improved Evaluation of Short-Circuit Breaking Tests. In Proceedings of the Conseil International Des Grands Reseaux Elecctriques, Colloquium of CIGRE SC 13, Sarajevo, Yugoslavia, May 1989.
- Demetrios, K.; Reuben, H.; Frank, A.B. Magnetically controlled arcs for power collection. IEEE Trans. Ind. Appl. 1981, IA-17, 174–178. [Google Scholar]
- Li, P.; Li, G.; Xu, Y.; Yao, S. Methods Comparation and Simulation of Transformer Harmonic Losses. In Proceedings of the 2010 Asia-Pacific Power and Energy Engineering Conference (APPEEC), Chengdu, China, 28–31 March 2010.
- Zhang, B.; Liu, Y.; Zhao, K.; Jiang, C.; Zhang, Z.L. Transformer Loss Calculation and Analysis Driven by Load Harmonics. In Proceedings of the 2011 International Conference on Electrical and Control Engineering (ICECE), Yichang, China, 16–18 September 2011; pp. 1394–1398.
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Wang, J.; Yang, Z.; Lin, F.; Cao, J. Harmonic Loss Analysis of the Traction Transformer of High-Speed Trains Considering Pantograph-OCS Electrical Contact Properties. Energies 2013, 6, 5826-5846. https://doi.org/10.3390/en6115826
Wang J, Yang Z, Lin F, Cao J. Harmonic Loss Analysis of the Traction Transformer of High-Speed Trains Considering Pantograph-OCS Electrical Contact Properties. Energies. 2013; 6(11):5826-5846. https://doi.org/10.3390/en6115826
Chicago/Turabian StyleWang, Jin, Zhongping Yang, Fei Lin, and Junci Cao. 2013. "Harmonic Loss Analysis of the Traction Transformer of High-Speed Trains Considering Pantograph-OCS Electrical Contact Properties" Energies 6, no. 11: 5826-5846. https://doi.org/10.3390/en6115826