1. Introduction
Due to the co-operation flexibility introduced by the multiple energy storages or power sources, hybrid electric vehicles (HEVs) have the potential to reduce fuel consumption and emissions in comparison to the conventional vehicles. To ensure the vehicle remains drivable, the total power from the battery and engine should meet the driver’s power requirement at each instant. Beyond this point-wise constraint, there is still plenty of flexibility in manipulating the engine and battery power for various optimization purposes. The power distribution solutions obtained from the energy management strategy are typically solved by numerical or analytical optimization techniques.
The energy management strategy in HEVs consists of the decision for the power distribution among multiple power sources and the regulation of the power transmission, which results in the balancing among the different performance, including fuel economy, emissions and other possible cost [
1,
2]. Various hard and soft constraints, if applicable, have to be respected when the energy management strategy is designed. For instance, the state of charge (SOC) should be maintained within a certain range to mitigate battery degradation. The torque capacity of the engine and electric motor vary with their rotational speed or environmental temperature. And the engine and motor must be limited to the specific speeds to ensure safety and reliability. The energy management algorithm can be solved using the optimal control techniques since its objective is minimizing a performance index defined over a specific problem horizon. Technically, the desired output trajectory is known a priori when the vehicle follows a certain drive cycle. Dynamic programming (DP) [
3,
4,
5] and the analytical optimal control techniques [
6,
7,
8] can then be used to obtain the theoretical optimal results. The results obtained through DP are unbeatable but, unfortunately, is an optimal input but not a control algorithm, and thus is not suitable for real-time implementation. Consequently, a post-processing step, namely the rule extraction, is required,
e.g., through Neural Networks, which approximates the results of the optimal control pattern. But it is impractical to obtain the control strategy to mime the optimal behaviors under the all driving conditions. Hence, the controller based on DP is effective only for the specific driving cycle that is used for the rule extraction. To remedy this problem, the stochastic dynamic programming (SDP) method [
9,
10,
11] and the driving pattern detection within multiple driving cycles [
12] had been suggested as the possible solutions. As a general case of the Euler-Lagrange equation, Pontryagin’s minimum principle (PMP) was also introduced to obtain optimal control solution for hybrid vehicles [
13,
14,
15,
16], where the Hamiltonian is considered as an analytical function. Based on the theoretical backgrounds of PMP, the equivalent consumption minimization strategy (ECMS) [
17,
18,
19] was proposed to associate the electrical energy usage with future fuel consumption, and the equivalent fuel consumption is minimized at each time instant. Comparative studies of DP and PMP in the energy management of a series and power-split hybrid vehicle are presented in [
20] and [
21] respectively, in which normally one state variable, the battery’s SOC, and one control variable, the power distribution of the power sources, are involved. However, for both series and power split hybrid vehicles, there is no discrete transmission shift involved.
On the other hand, Automatic Manual Transmission (AMT) has been developed as a potential replacement of traditional automatic transmission with a torque converter, especially, on the parallel HEVs. In this paper, DP and PMP are applied to design the optimal control for a parallel hybrid vehicle with AMT. The powertrain is taken as the dynamic system with the two state variables, the battery’s SOC and the gear position of AMT, and two independent control variables, the engine throttle signal and gear shifting action. The gear is defined as a state in this optimal control problem because it relates directly to the torque of the engine and the shifting action should not be skipped in the control problem. The results of PMP are found to be near-optimal, close to those of DP and the co-state corresponding to the gear position state has an algebraic expression associated with the vehicular speed, which results in the global near-optimal behavior of PMP and gives the major contribution in this paper.
The remainder of this paper is organized as follows: in
Section 2, the hybrid powertrain is modeled and the optimal control problem is formulated. DP and PMP-based methods are applied and results are analyzed in
Section 3. The solutions from DP and PMP are compared in
section 4 and the conclusions are provided in
Section 5.
2. Hybrid Powertrain Modeling
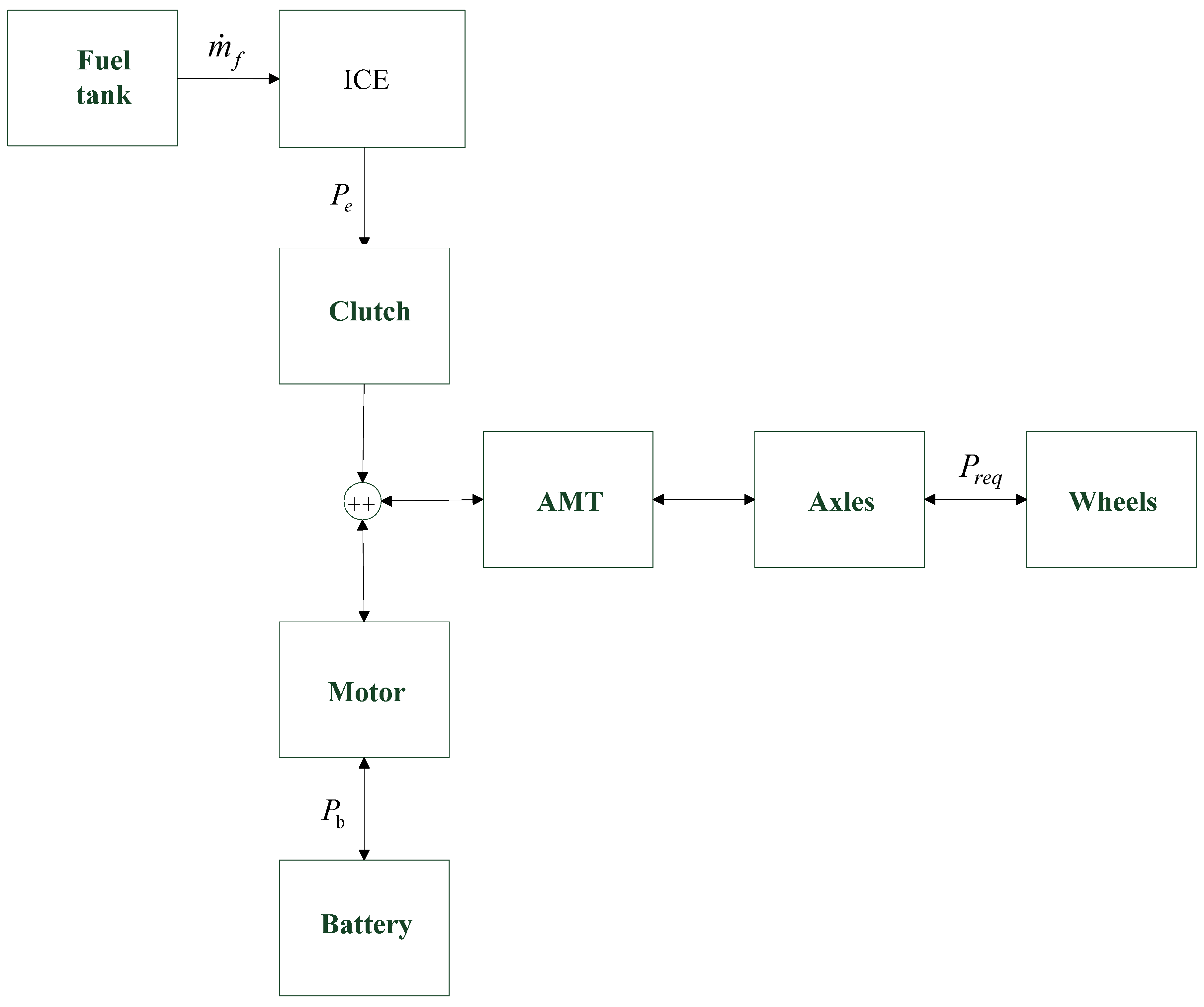
The schematic diagram of the parallel hybrid powertrain and its power flows are shown in
Figure 1, where
Preq is the power request,
Pb is the electric power from the battery pack and
Pe is the mechanical power output from the diesel engine, respectively,
is fuel consumption rate, normally decided by the brake specific fuel consumption (BFSC) map derived through the bench test. The arrows of the lines in
Figure 1 indicate the directions of the power flows. The torques of the engine and the electric motor are combined before the AMT. The 7.0
L diesel engine is adopted, giving 155 kW maximum power at the speed of 2000 rpm and 900 Nm maximum output torque within the speed range from 1300 rpm to 1600 rpm. The electric motor can output 90 kW maximum power, 600 Nm maximum torque and has 2400 rpm maximum speed. The 60 Ah lithium-ion battery pack gives 312.5 V rated voltage. The AMT is configured with nine ratios: 12.11, 8.08, 5.93, 4.42, 3.36, 2.41, 1.76, 1.3 and 1. The curb weight of the vehicle is 16,000 kg, the tire radius is 0.508 m, the final ratio is 4.769 and the fronted area is 6.2 m
2.
Given a driving cycle defined by the vehicle velocity history
v(
t),
. The power request
Preq(
t) is calculated as in Equation (1):
Where
m is the vehicle mass;
δ is the mass factor, combining the moving and rotation inertial together;
f is the coefficient of the rolling resistance;
CD is the aerodynamic coefficient;
A is the fronted area;
g is the acceleration of the gravity and
α(
t) is the gradeability.
At the same time, the power balancing should be maintained, as shown in Equation (2):
Where
ηm is the efficiency of the electric motor, decided by the motor speed and torque, normally derived from the test bench; and
ηT is the efficiency of the transmission and axle, taken as the constant 0.9. Clearly the engine power
Pe(
t) can be regulated by the engine’s throttle signal
th(
t). It means that
Pbatt could be decided by
th(
t) at any time when
Preq(
t) is known in advance. Thus the engine throttle signal
th(
t) can be chosen as a control variable, ranging from 0 to 1.
Figure 1.
The pre-transmission parallel hybrid electric powertrain.
Figure 1.
The pre-transmission parallel hybrid electric powertrain.
The state charge of the battery,
soc, relates to the battery current by:
where
Cbatt is the battery capacity;
I(
t) is the battery current. The variation of
soc is calculated by Equation (4):
where
Voc(
soc) is the open circuit voltage;
Rint(
soc) is the internal resistance of the battery;
Rt is the terminal resistance. It should be noted the explicit dependence of
soc through open-circuit voltage
Voc and the internal resistance
Rint. However, the assumption that the variation of
soc depends only on
Pbatt is made reasonably when
soc changes within a narrow range for the hybrid electric vehicles.
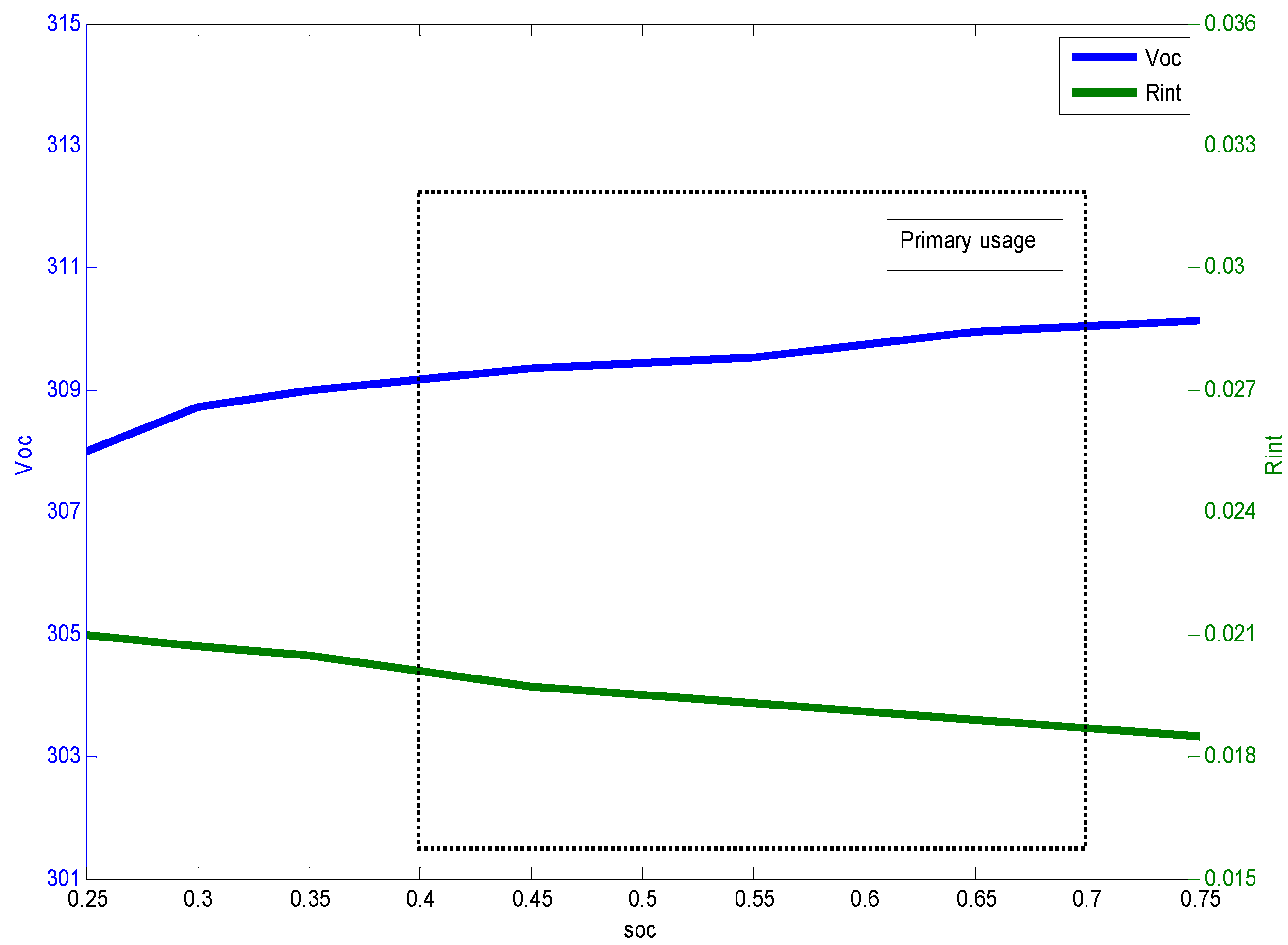
Voc(
soc) and
Rint(
soc) can be obtain through the bench test, as shown in
Figure 2, where
soc stays in the primary usage range and thus
Voc and
Rint can be assumed to be independent of
soc.
Figure 2.
Voc and Rint varying as soc changes.
Figure 2.
Voc and Rint varying as soc changes.
The current gear position is defined as a state because the shifting strategy plays a key role for this vehicle and the skip of it is not expected. The variation of current gear position
ig(
t),
is associated with gear shifting action
sh(
t) and calculated by Equation (5):
where
sh(
t) can be −1, 0, or 1, representing downshift, hold and upshift, respectively.
Over the entire optimization horizon [
t0,
tf], the system state
evolves according to Equation (6):
where
,
f represents Equations (1–5). The inequality constraints for the state and control variables include:
where
Pb,min and
Pb,max are the battery recharge and discharge power limitation;
ωe,min(
t),
ωe(
t) and
ωe,max(
t) is the idling speed, normal rotational speed and maximum speed of the engine;
Pe,max is the power limitation of the engine; The variable
soc(
t) is constrained within the permitted minimum value
socmin and the maximum value
socmax.
The cost function to be minimized is normally the compromise of the economy and other performance, here the accumulated fuel consumption and the gear shifting events are included, as shown in Equation (11):
where
J is the cost metrics. The portion
β|
sh(
t)| is introduced to avoid the excessive shifting and
β is a positive weighting factor, here tuned to 0.01 to reach the equilibrium between the shift frequency and fuel consumption [
22].
The state terminal conditions are shown in Equation (12):
The terminal constraint for
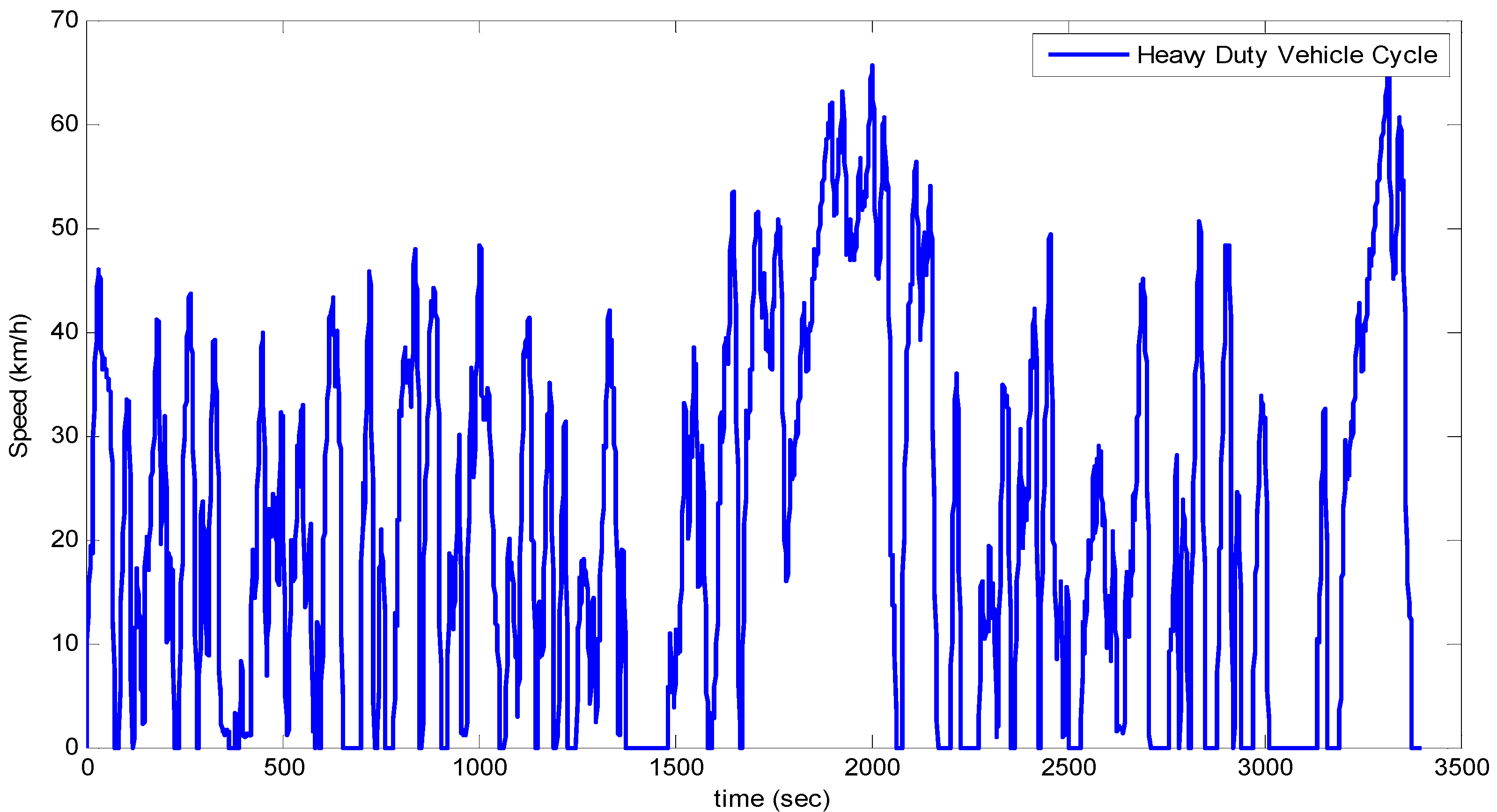
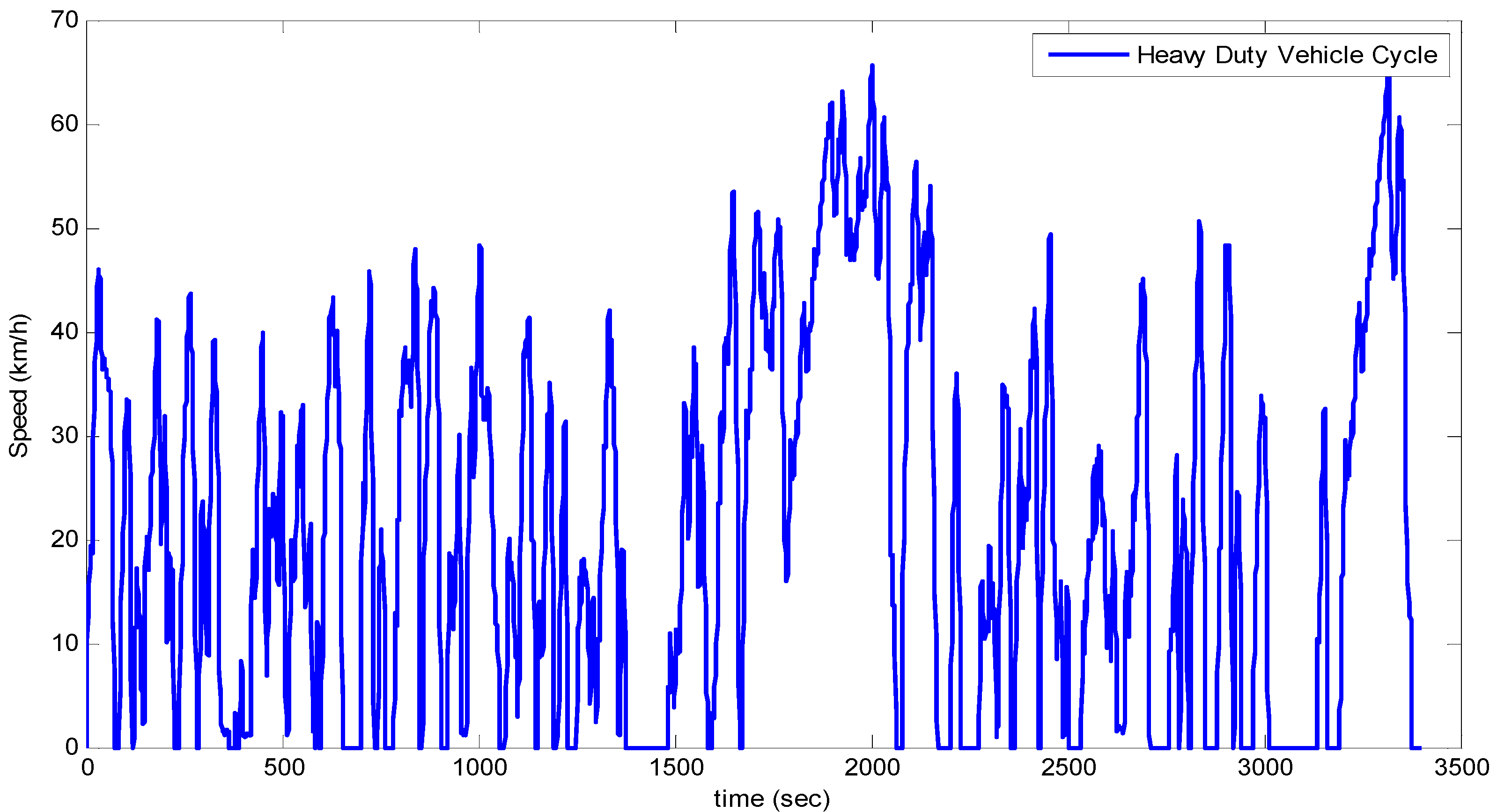
x(1) are imposed to ensure battery energy is sustained. The heavy-duty vehicle natural driving cycle used for the simulation is shown in
Figure 3, which is obtained from a heavy garbage collecting vehicle under the normal operation full of the frequent stops and brakes.
Figure 3.
Heavy-duty vehicle natural driving cycle.
Figure 3.
Heavy-duty vehicle natural driving cycle.
4. Comparative Analysis for the Results from PMP and DP
The SOC curves from DP and PMP respectively are shown in
Figure 5. The similar tendency of both curves is found, decreasing first, and then increasing steadily when the engine provides more power. During t = 1500~2000 s, the vehicle operates at the higher velocity, the engine and battery provide the power together and the value of SOC reaches the minimum valley, no matter in DP or PMP case. However, the solutions of DP and PMP have the minor differences.
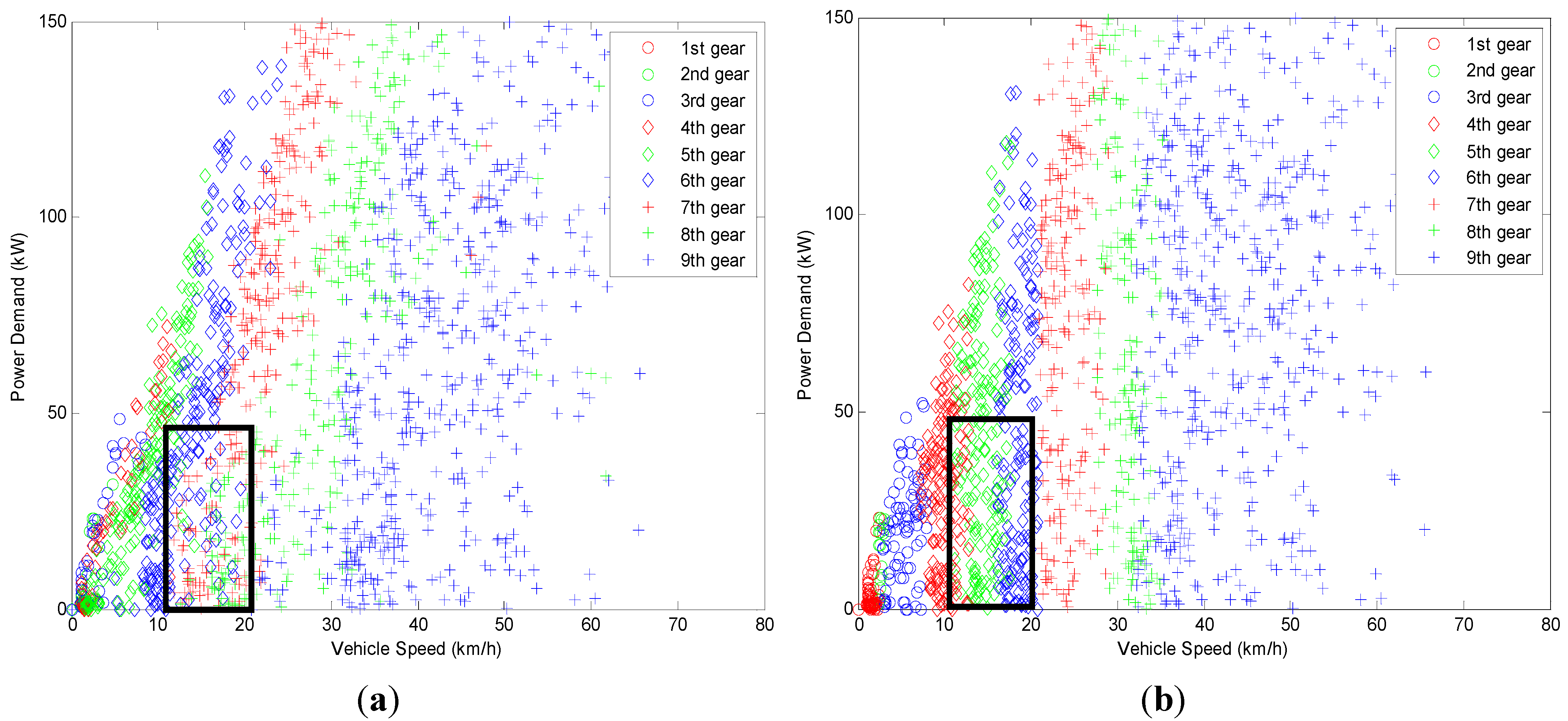
The gear distribution in DP and PMP with the different power requirement and velocity range is shown in
Figure 6. Due to the time-varying co-state
p2, which controls the gear shifting in PMP, the result in PMP is basically similar to that in DP. Additionally, the minor difference of the gear shifting is found in
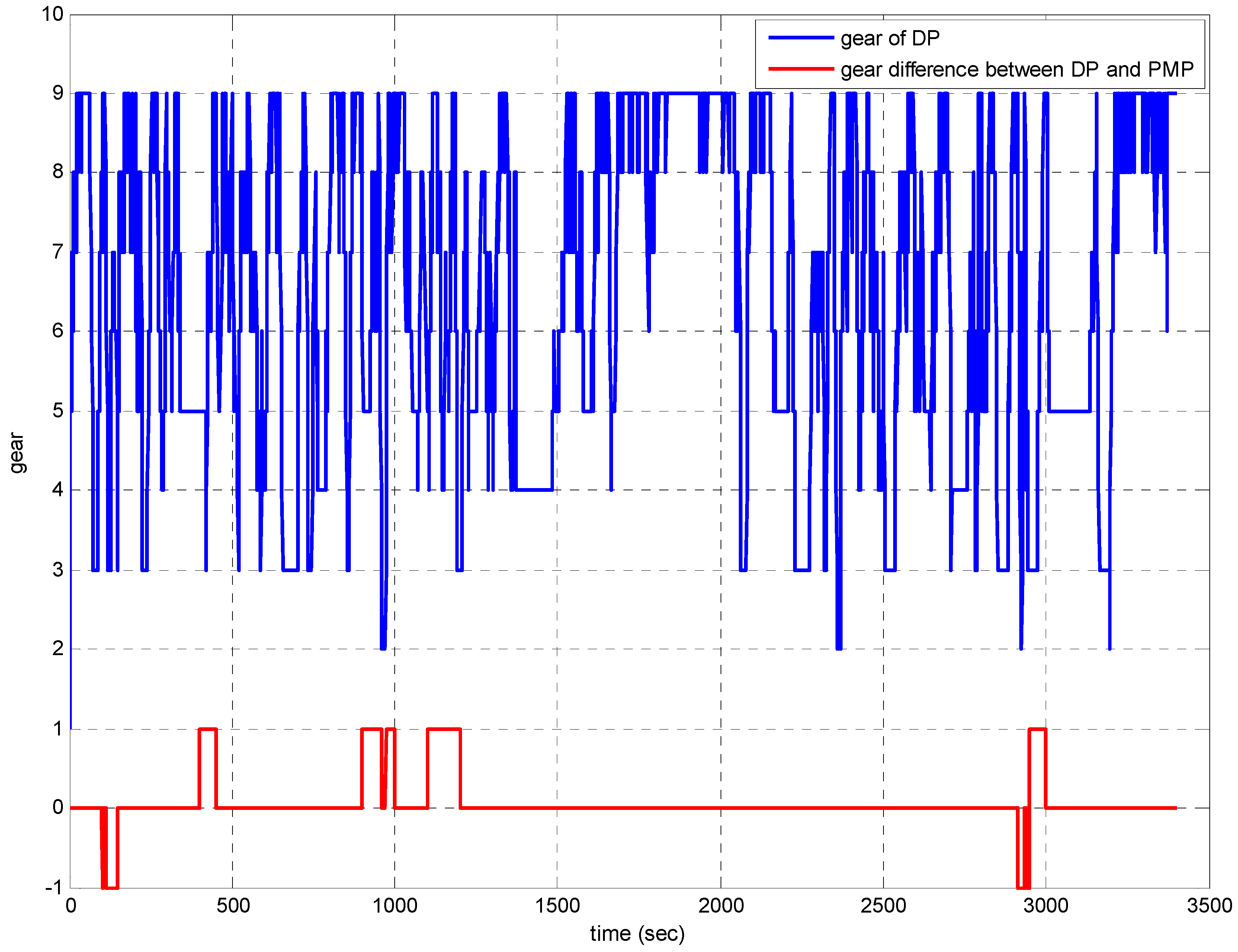
Figure 6, as highlighted in the black rectangle area. It can be expressed further in
Figure 7. As shown in the green ellipse of
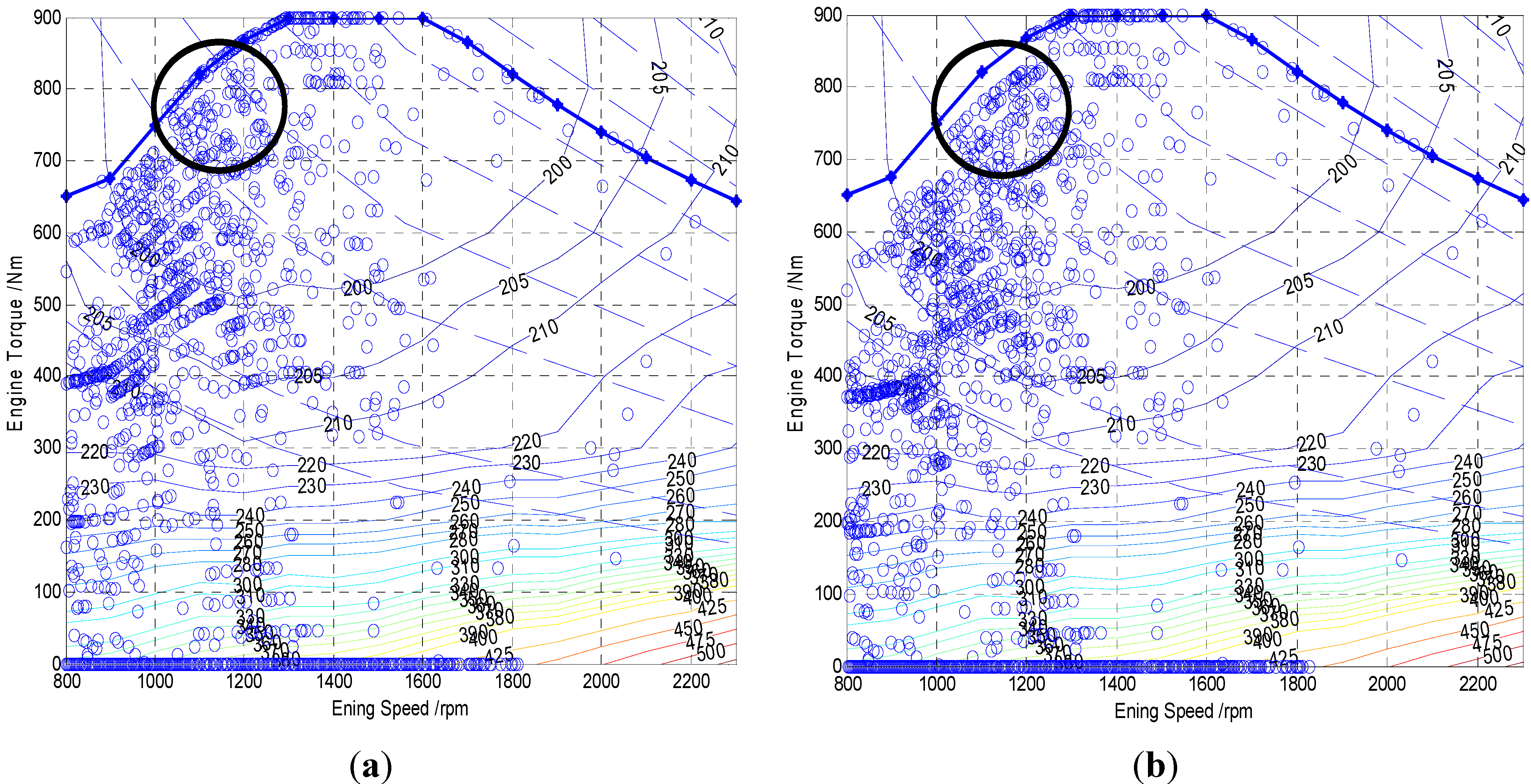
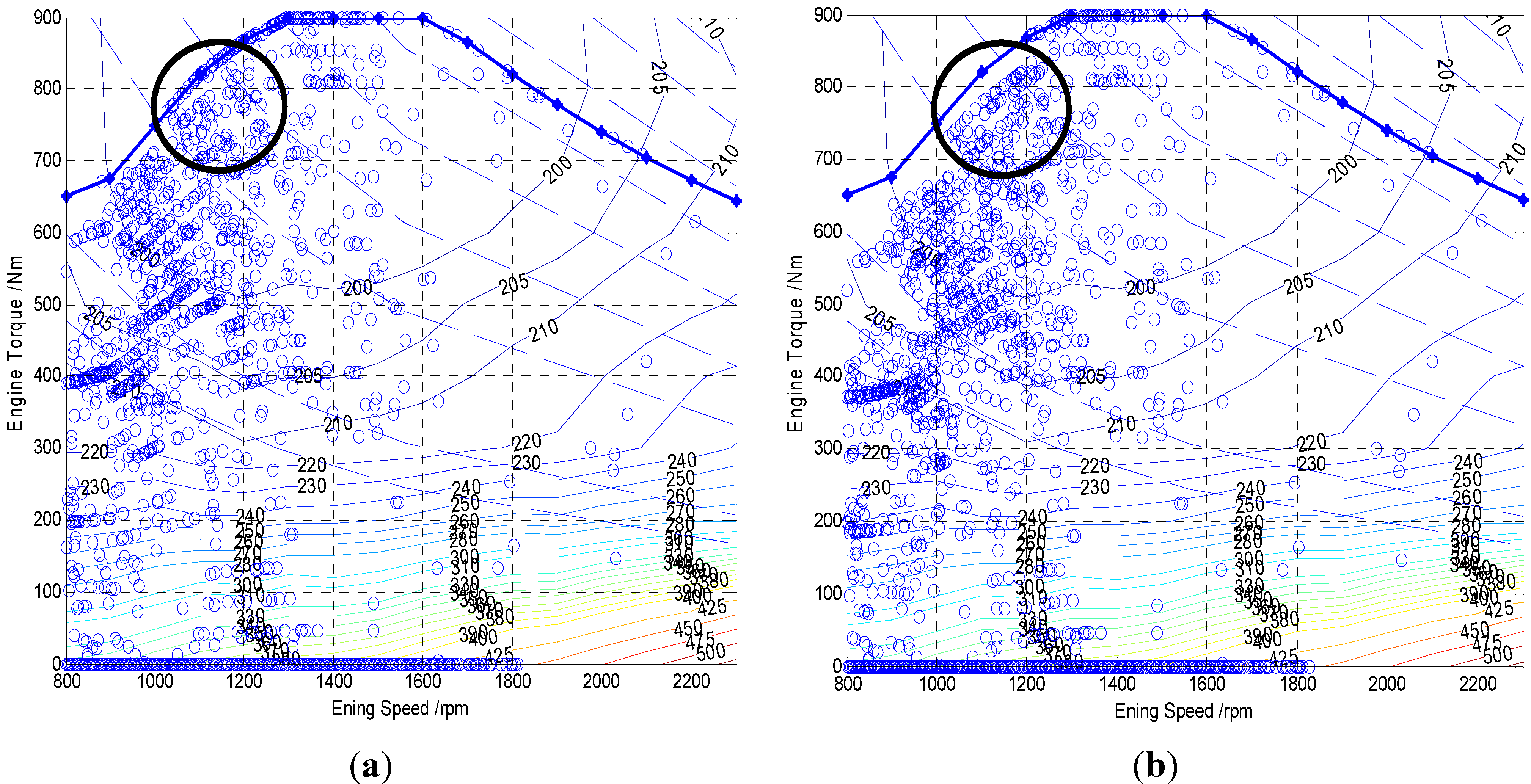
Figure 7, the gear in PMP is slightly lower than that in DP, which causes that the operating points of the engine in PMP are mildly lower than those in DP, as noted by the black circles in
Figure 8. The total fuel consumption in PMP is slightly more than that in DP can be explained by the operating points of engine and fuel consumption curves in
Figure 9. Moreover, the difference of the SOC curves in
Figure 5 before the minimum valley can be explained by that the power provided by engine in PMP is lower than that in the DP, as shown in
Figure 8.
Figure 5.
SOC curves of DP and PMP.
Figure 5.
SOC curves of DP and PMP.
Figure 6.
Gear distribution of DP and PMP. (a) Gear distribution of DP; (b) Gear distribution of PMP.
Figure 6.
Gear distribution of DP and PMP. (a) Gear distribution of DP; (b) Gear distribution of PMP.
Figure 7.
Gear shifting of DP and PMP.
Figure 7.
Gear shifting of DP and PMP.
Figure 8.
Work area of engine in DP and PMP. (a) Working zone of the engine in DP; (b) Working zone of the engine in PMP.
Figure 8.
Work area of engine in DP and PMP. (a) Working zone of the engine in DP; (b) Working zone of the engine in PMP.
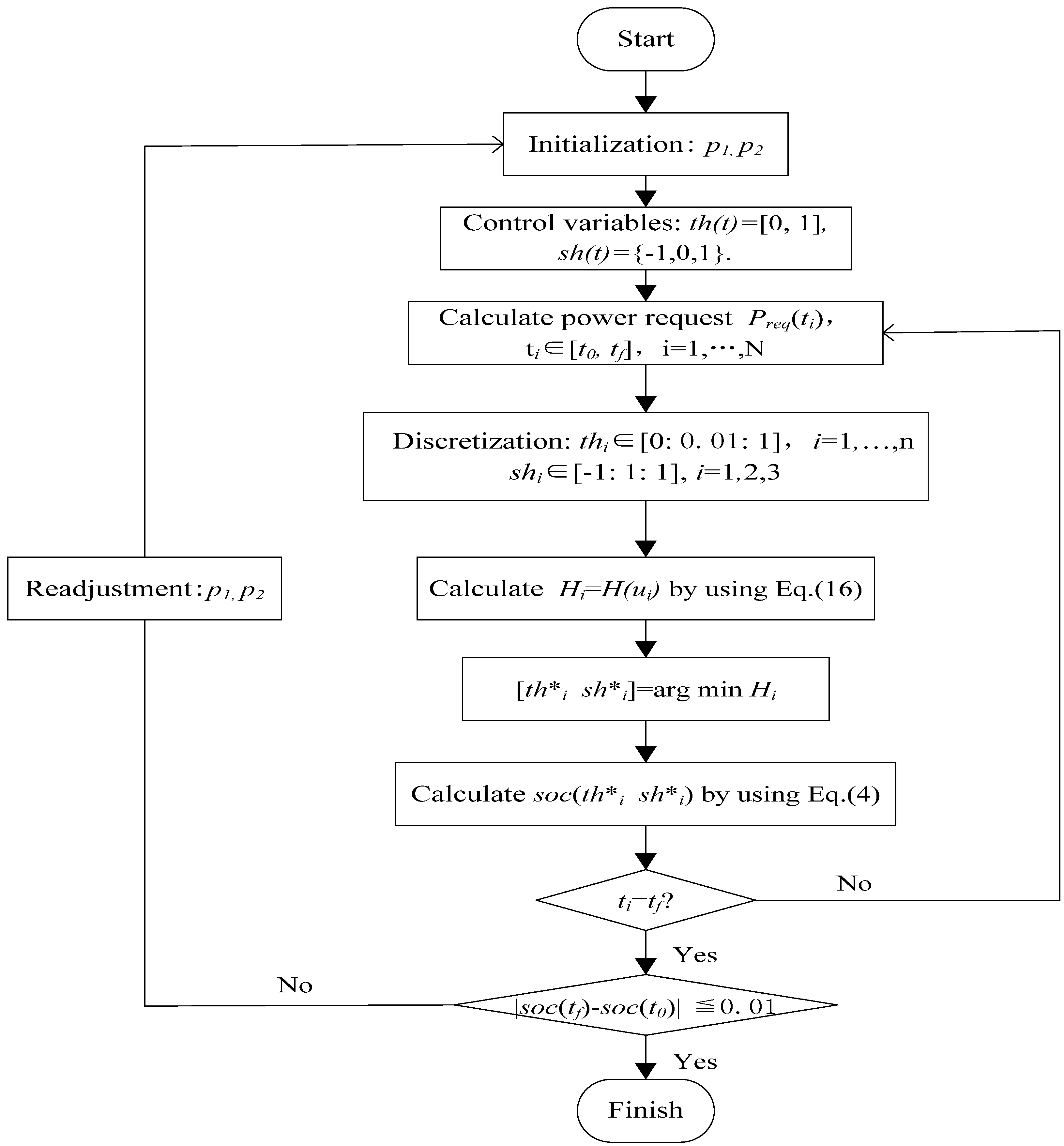
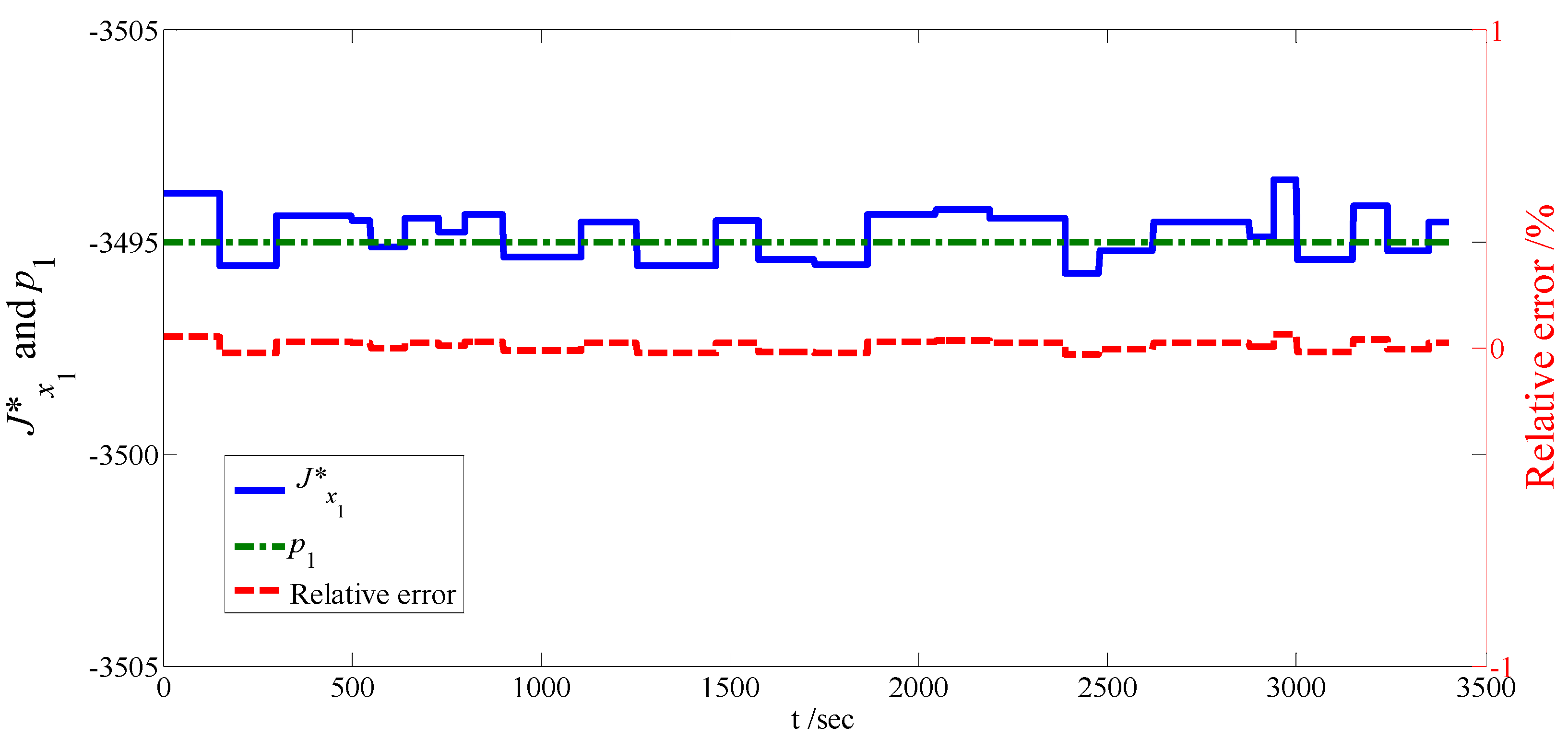
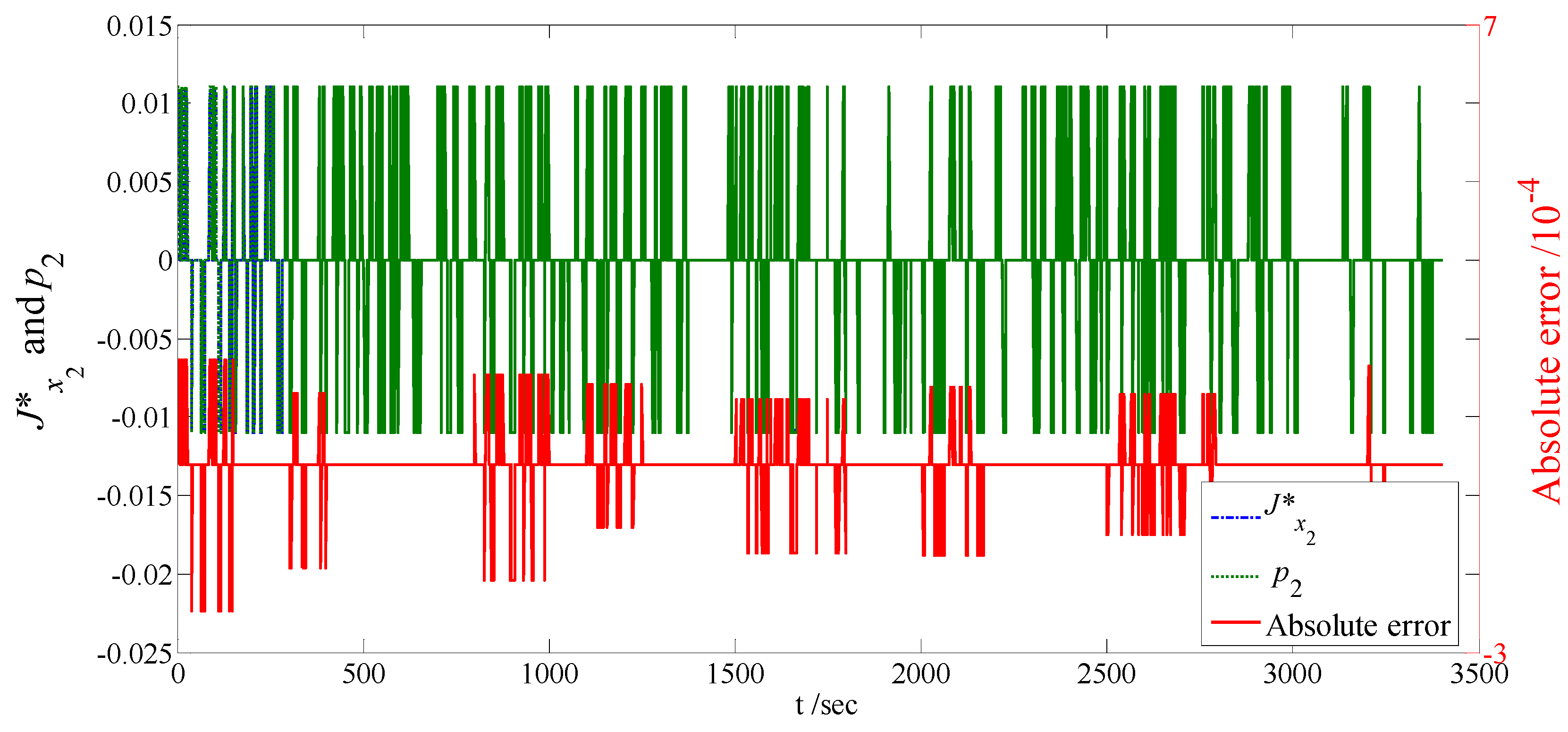
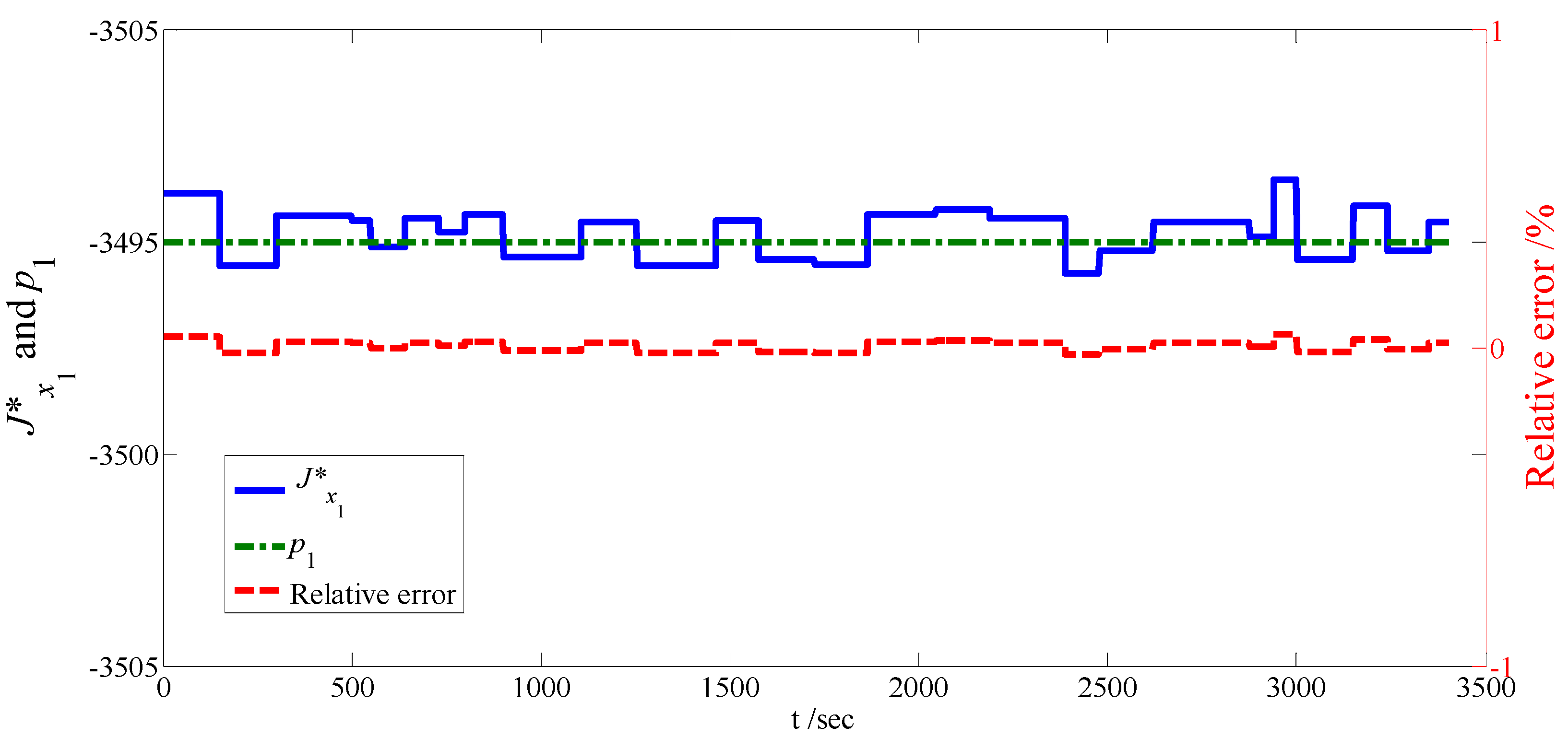
Consequently, it is significant to observe that when tuned with an appropriate co-state value, PMP can give a solution close to DP although it has been implemented with an instantaneous minimization process. The co-states
p1 and
p2 are compared with the analogue quantities extracted from DP in
Figure 9 and
Figure 10 respectively, according to Equation (20) [
23]:
where
Jx*(
x*(
t),
t) is the partial derivative of the cost function
J with the respect to
x when the optimal trajectory
x*(
t) is adopted,
p*(
t) is the optimal co-state trajectory. It is found that co-states generated by the iterative procedure as shown in
Figure 4 and Equation (19) approximate the optimal solution from DP effectively. It also explains the similar behavior of DP and PMP as shown in
Figure 6,
Figure 7,
Figure 8. The fuel consumption in the PMP case is 5.37
L, 0.4% more than that of 5.35
L in DP case.
Figure 9.
and p1.
Figure 9.
and p1.
Figure 10.
and p2.
Figure 10.
and p2.






 , which results in:
, which results in:




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}