Contribution of Small Wind Turbine Structural Vibration to Noise Emission


Abstract
:1. Introduction
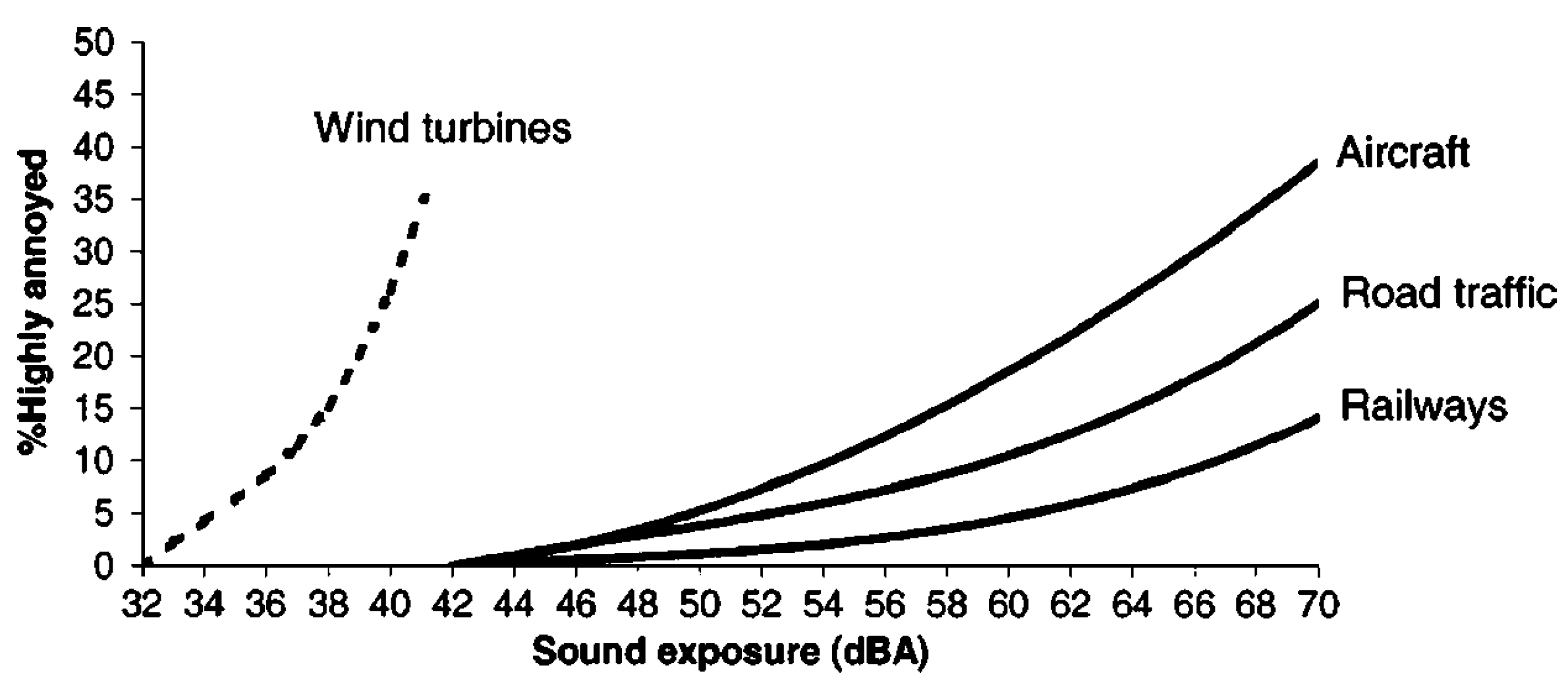
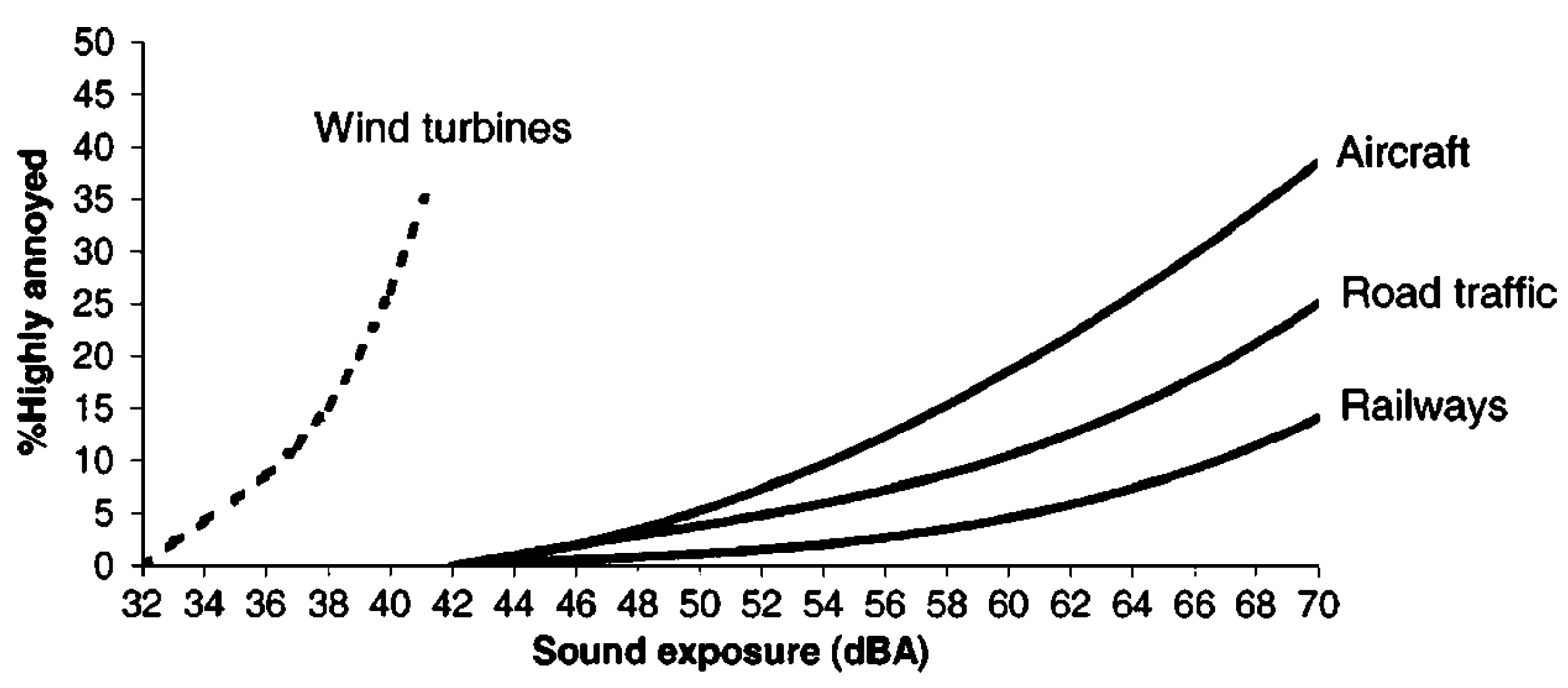
1.1. Small Wind Turbine Noise Perception
- Tonal noise was common in older turbines, which operated at constant blade speed. This type of noise is now uncommon, as most turbines are variable frequency;
- Broadband noise has frequency components higher than 100 Hz. This is produced typically by the blade interaction with the wind turbulence, leading to swishing;
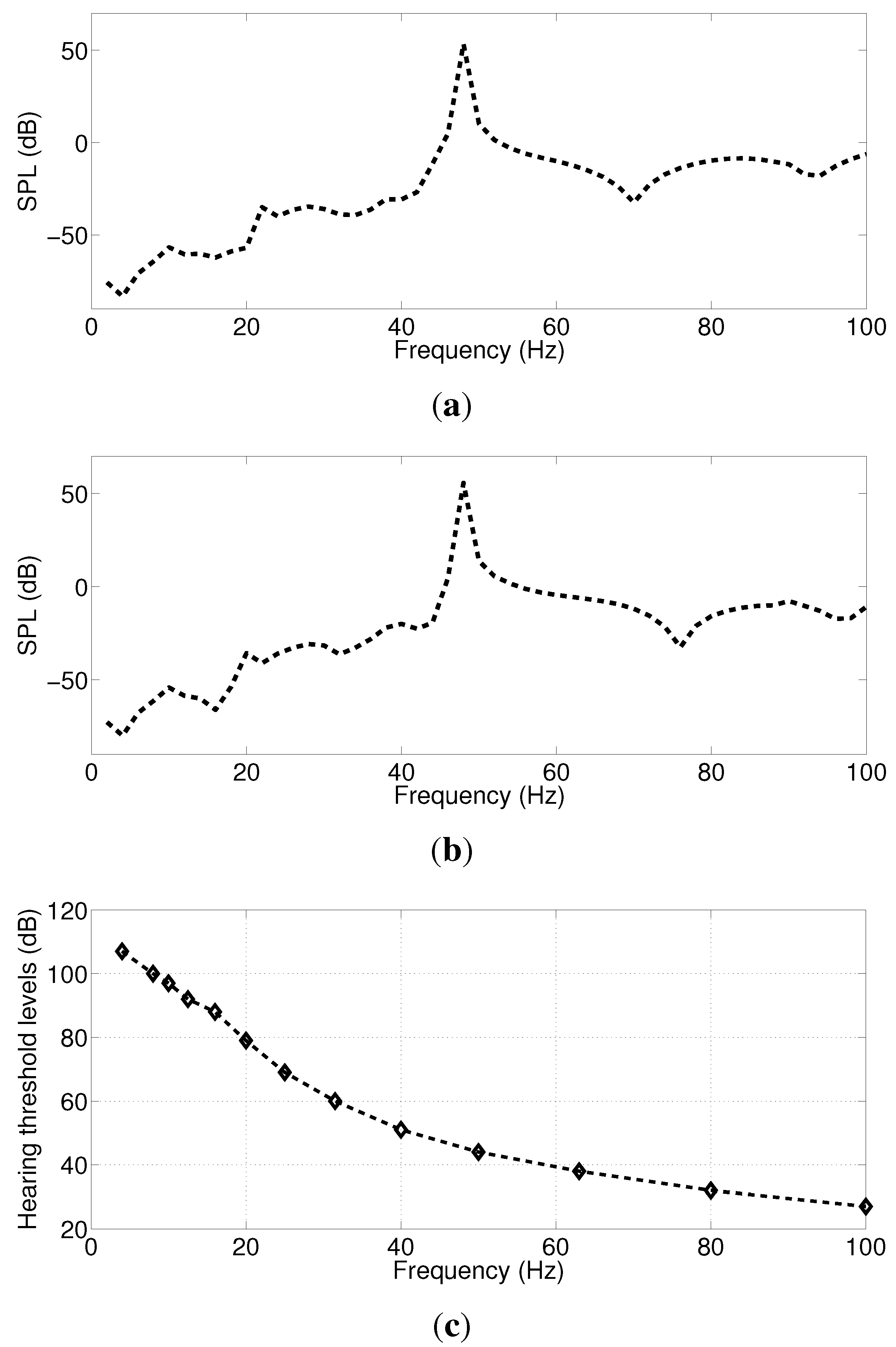
- Infrasound refers to frequencies below the hearing frequency threshold of about 20 Hz;
- The low frequency range between 20 and 100 Hz is suspected of irritation and includes contributions from blade-tower noise for downwind rotors, such as the one studied in this paper;
- Impulsive noise is the result of short acoustic impulses, whose amplitudes vary with respect to time. This is generated by the interaction of the blades with the disturbed air flow behind the tower of the downwind turbine.
2. Vibration Analysis
- Artificial excitation is usually conducted in the laboratory to determine the Frequency Response Function (FRF) and Impulse Response Function (IRF), which are mainly used as key data for corresponding modal parameter extraction. Input force and response may be very difficult to measure in the field for large structures, such as bridges and wind turbines. Furthermore, inputs, such as the wind and road vibration, are too complicated to characterize simply. Besides, a localized excitation could be insufficient to excite a large structure, and it is impossible to isolate such excitation from the environment excitation;
- In many applications, the actual modes may differ significantly from those measured in laboratory testing with artificial excitations. An SWT has many more noise sources while it is operating than when it is shut down. These include blade interaction with the tower and mechanical noise from the generator and other components. If the analyst is interested in vibration behaviour, rather than only modal parameters, then OMA would be more beneficial than EMA.

2.1. Literature Review
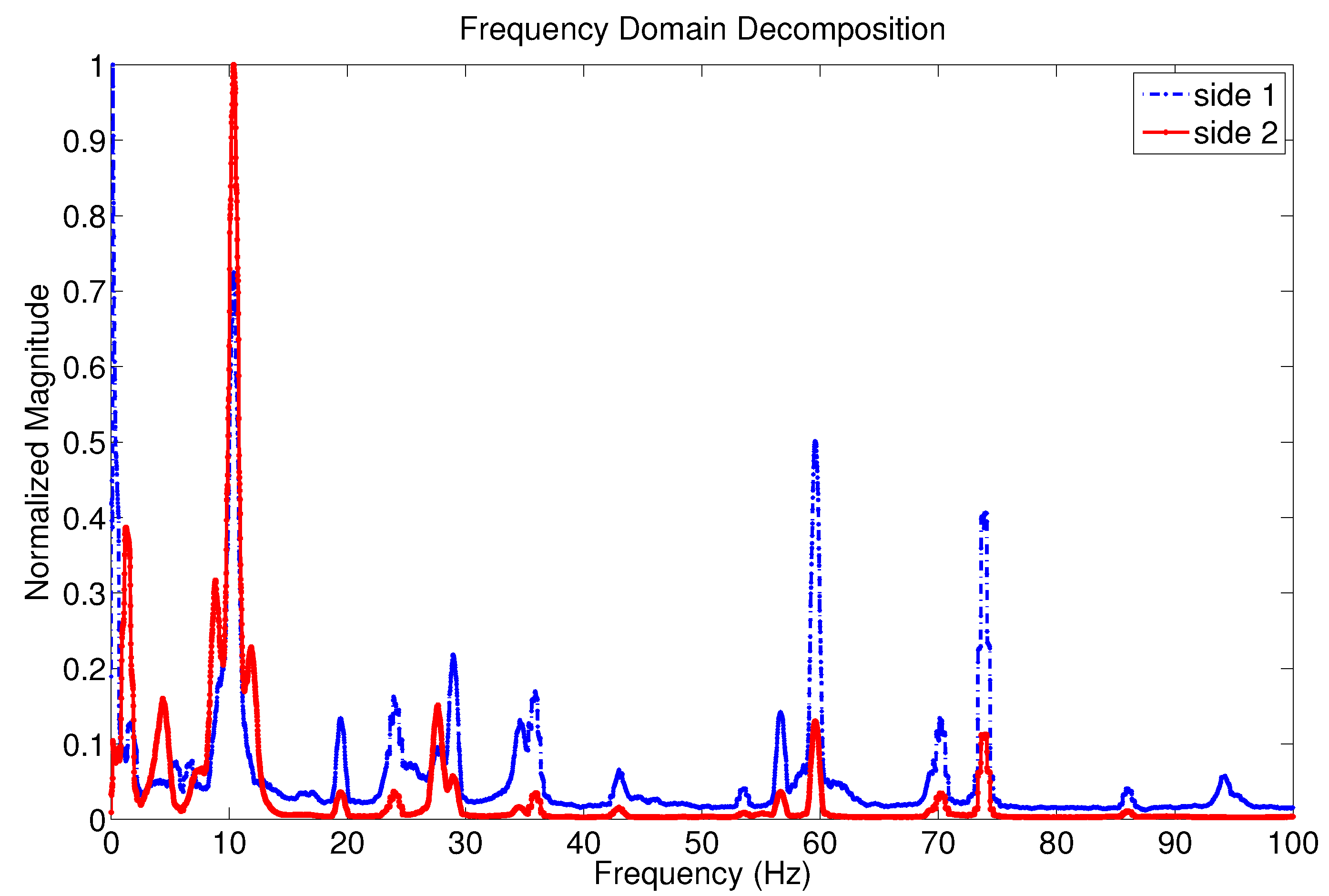
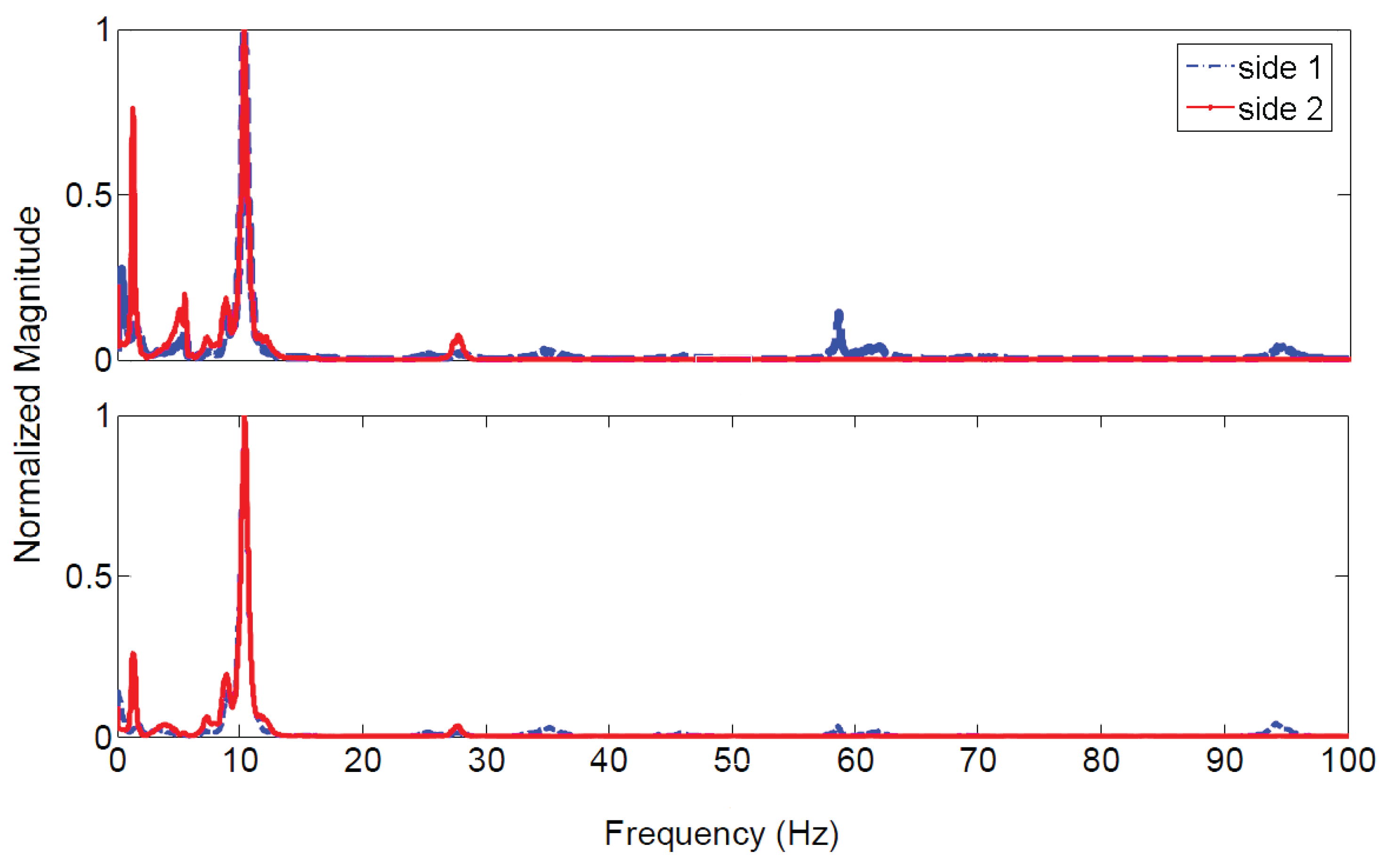
2.2. Frequency Domain Decomposition
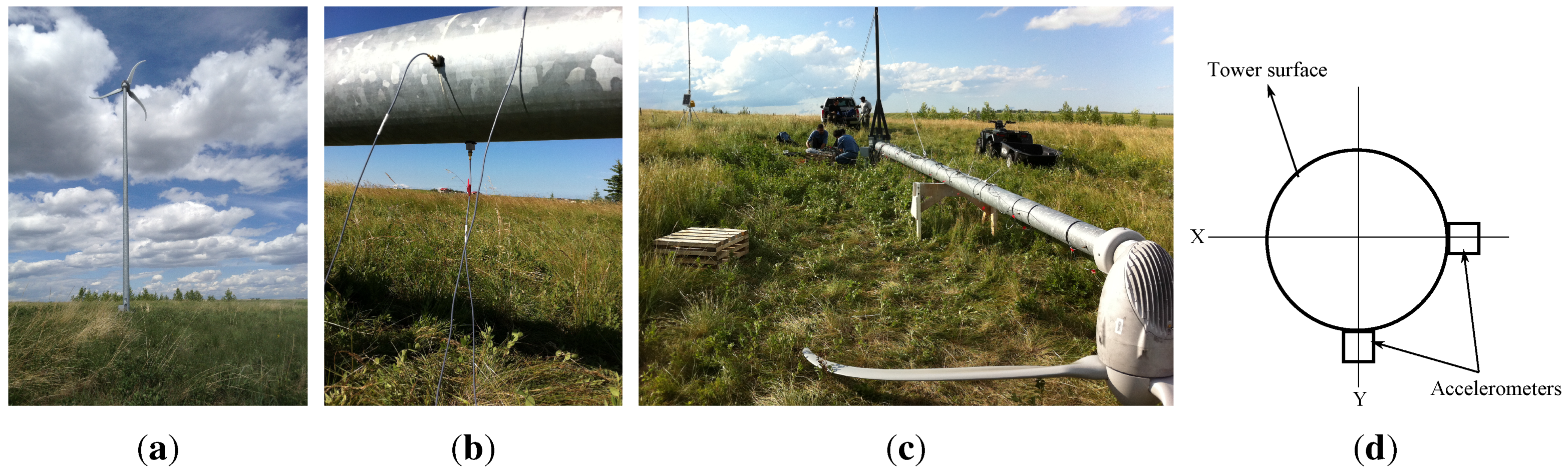
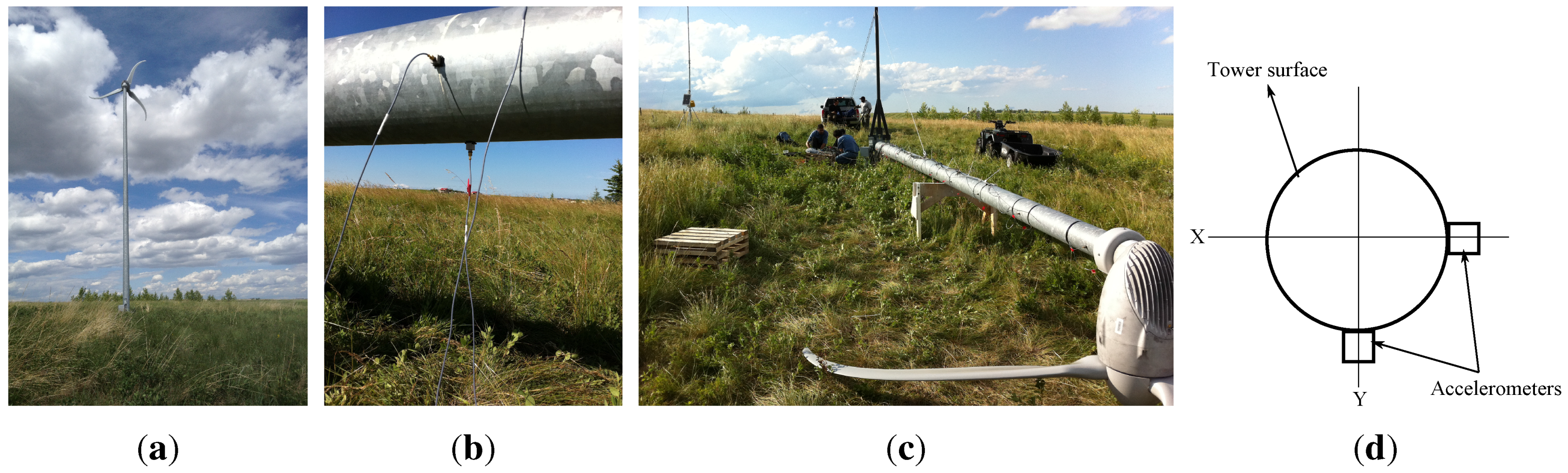
2.3. Tower Vibration

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
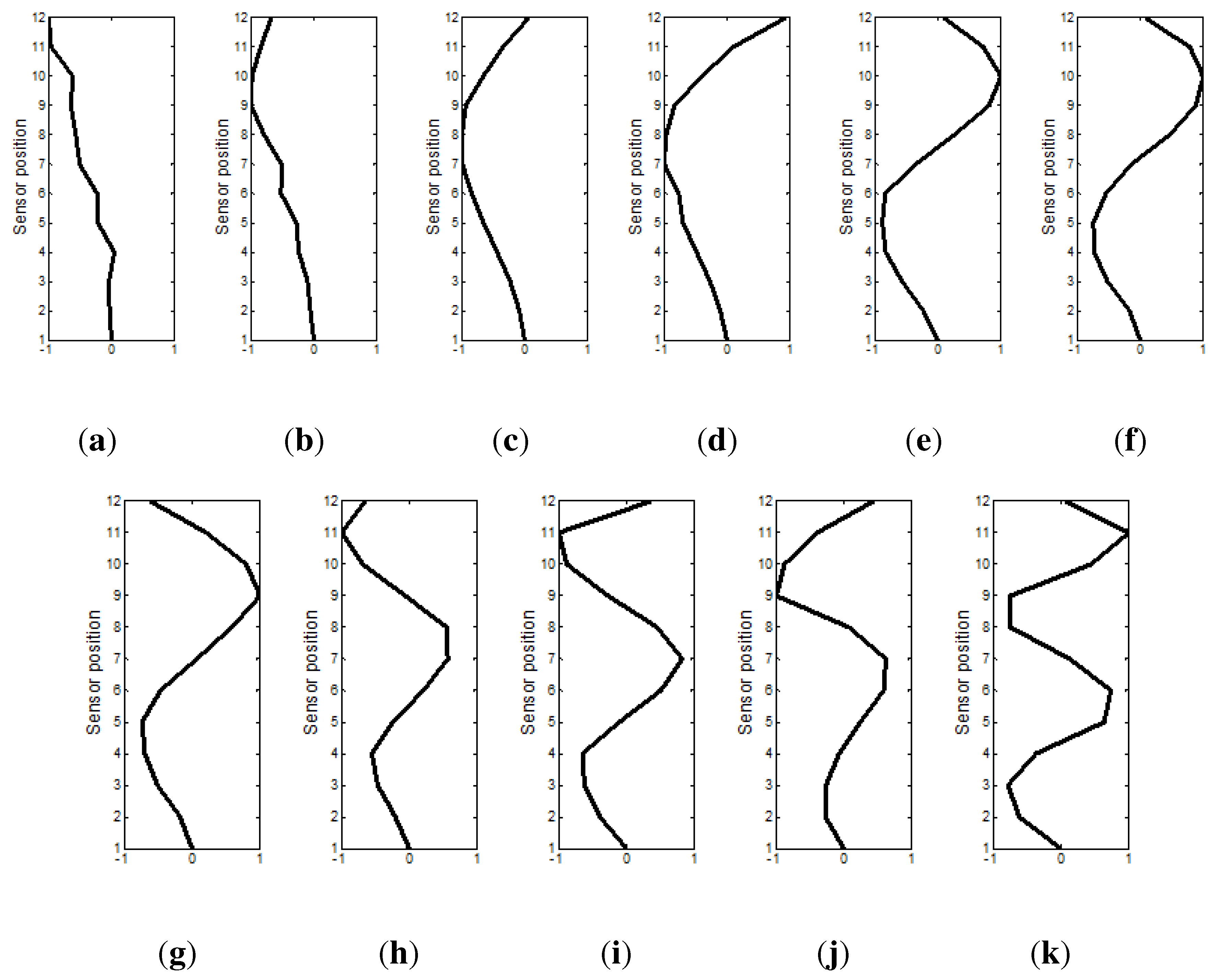
| Mode | Frequency (Hz) | Direction | Mode | Frequency (Hz) | Direction |
|---|---|---|---|---|---|
| 1 | 1.378 | X | 7 | 31.73 | Y |
| 2 | 1.379 | Y | 8 | 42.33 | X |
| 3 | 9.74 | X | 9 | 61.34 | Y |
| 4 | 9.92 | Y | 10 | 70.18 | X |
| 5 | 20.57 | Y | 11 | 101.53 | X |
| 6 | 24.97 | X | 12 | 107.43 | Y |
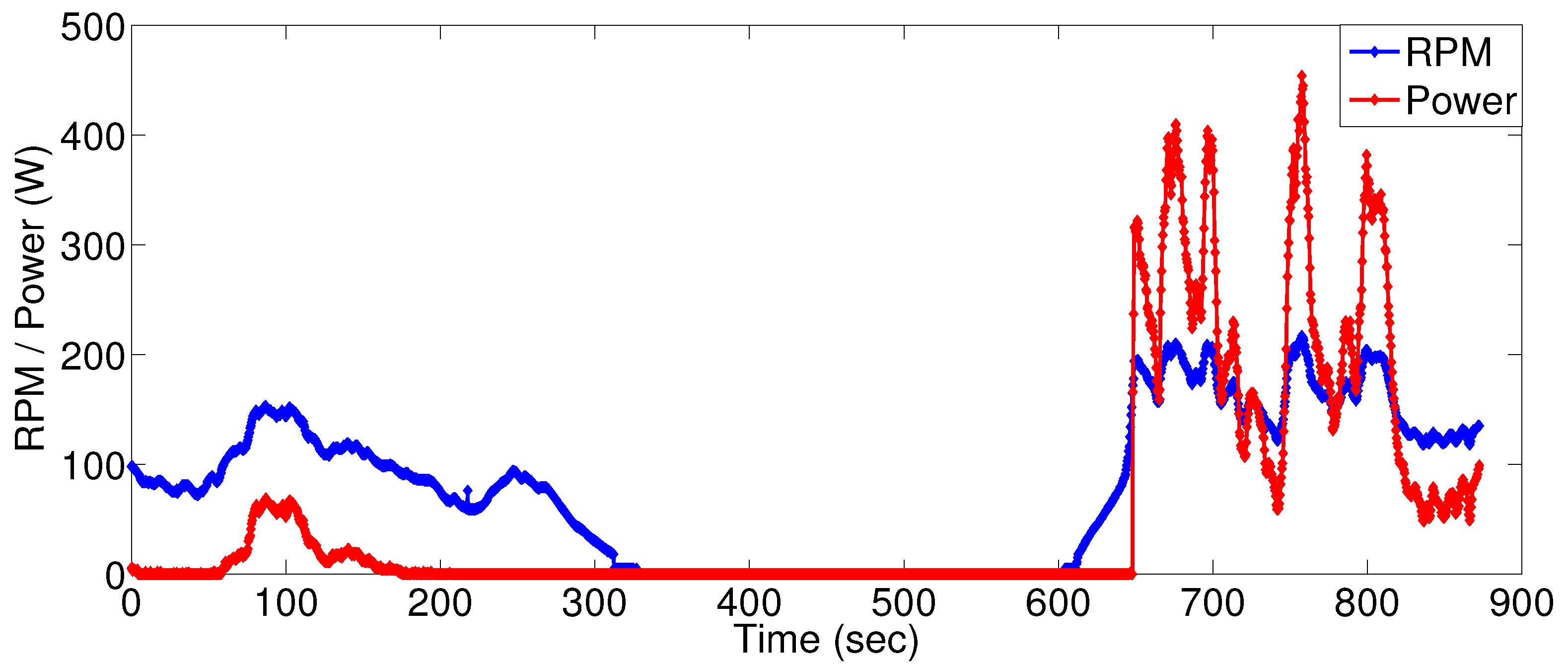
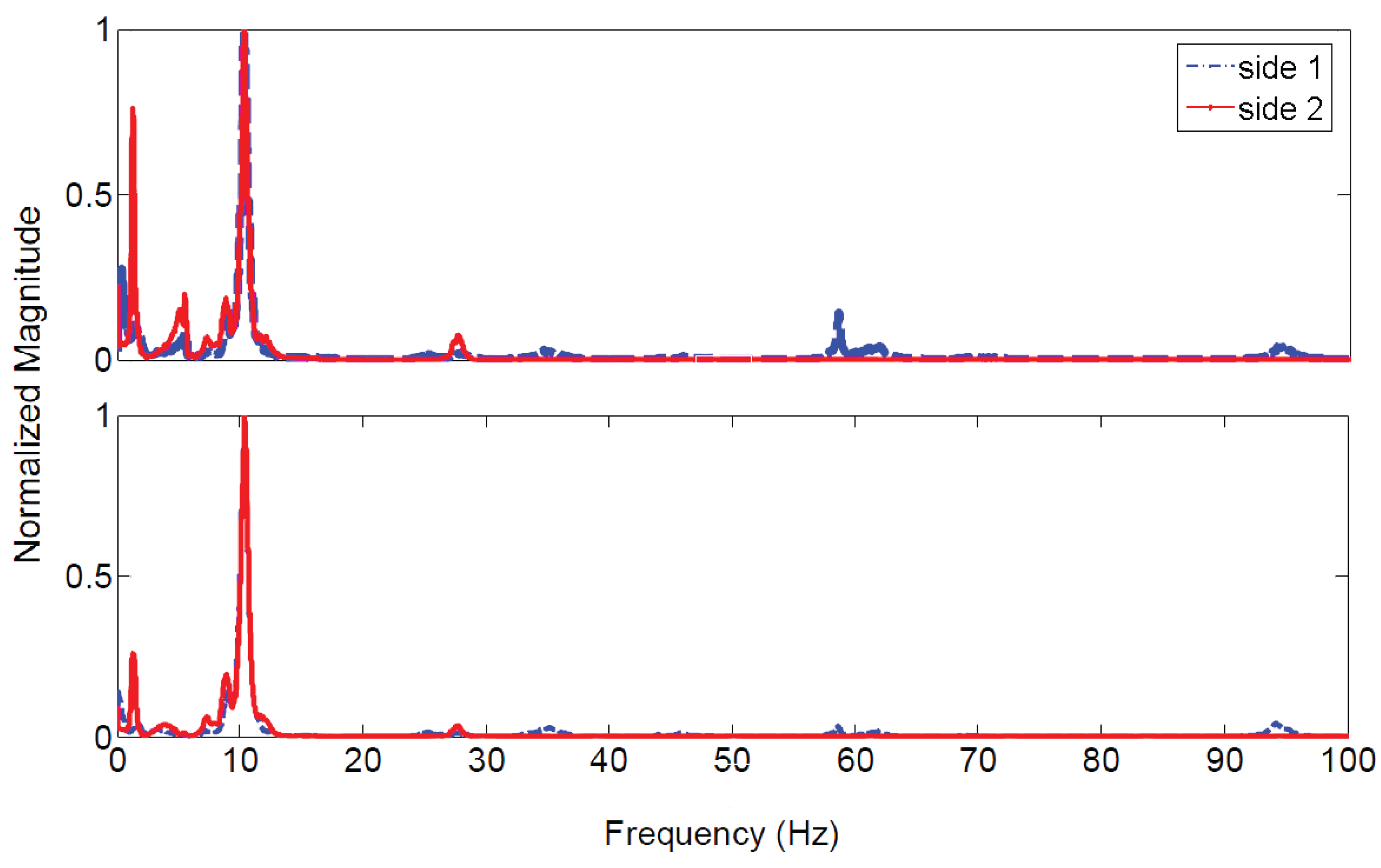
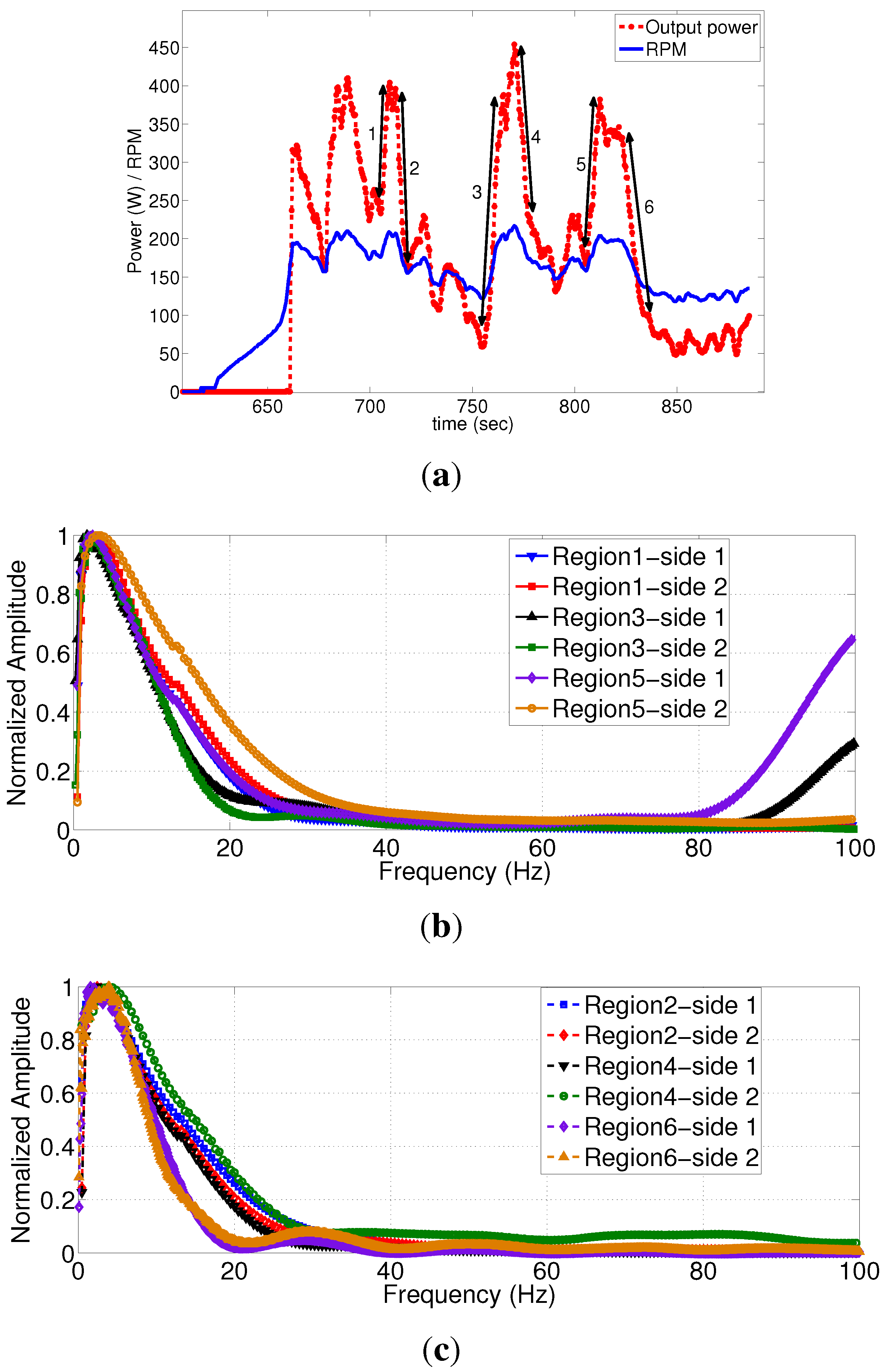
2.3.1. Experiment Results

| No. | Side 1 | Side 2 | No. | Side 1 | Side 2 |
|---|---|---|---|---|---|
| 1 | 0.15 | 0.16 | 11 | 34.6 | 33.8 |
| 2 | - | 1.33 | 12 | 35.9 | 36.7 |
| 3 | - | 4.48 | 13 | 43.1 | 45.2 |
| 4 | - | 8.82 | 14 | 56.6 | - |
| 5 | 10.4 | 10.3 | 15 | 59.7 | 58.8 |
| 6 | - | 11.9 | 16 | 70.3 | 72.9 |
| 7 | 19.5 | 21.3 | 17 | 73.8 | - |
| 8 | 23.9 | - | 18 | 85.9 | 85.4 |
| 9 | 28.9 | 27.5 | 19 | 94.02 | - |
| 10 | - | 29.5 | 20 | - | - |
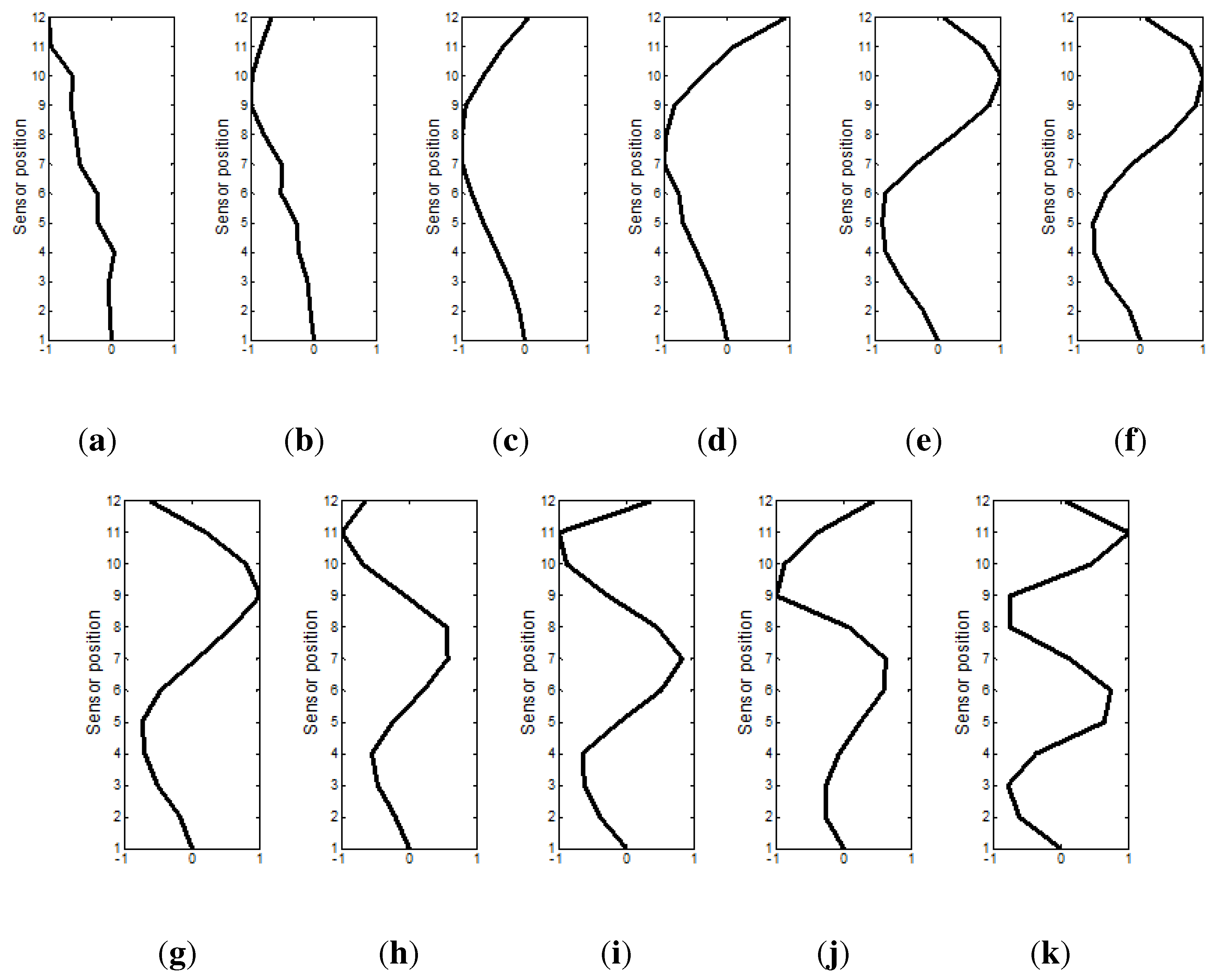
2.3.2. Operational Deflection Shapes Analysis
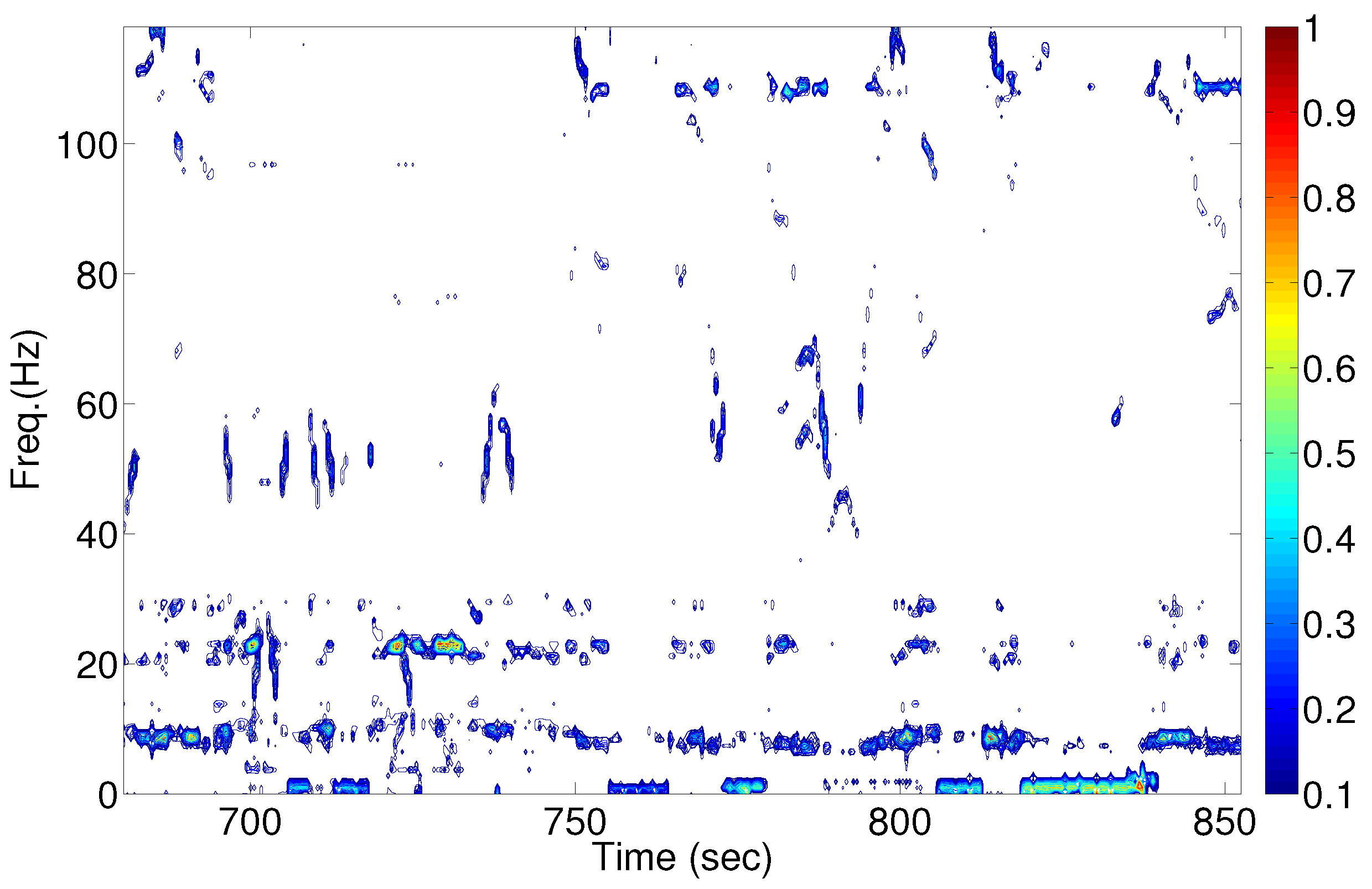
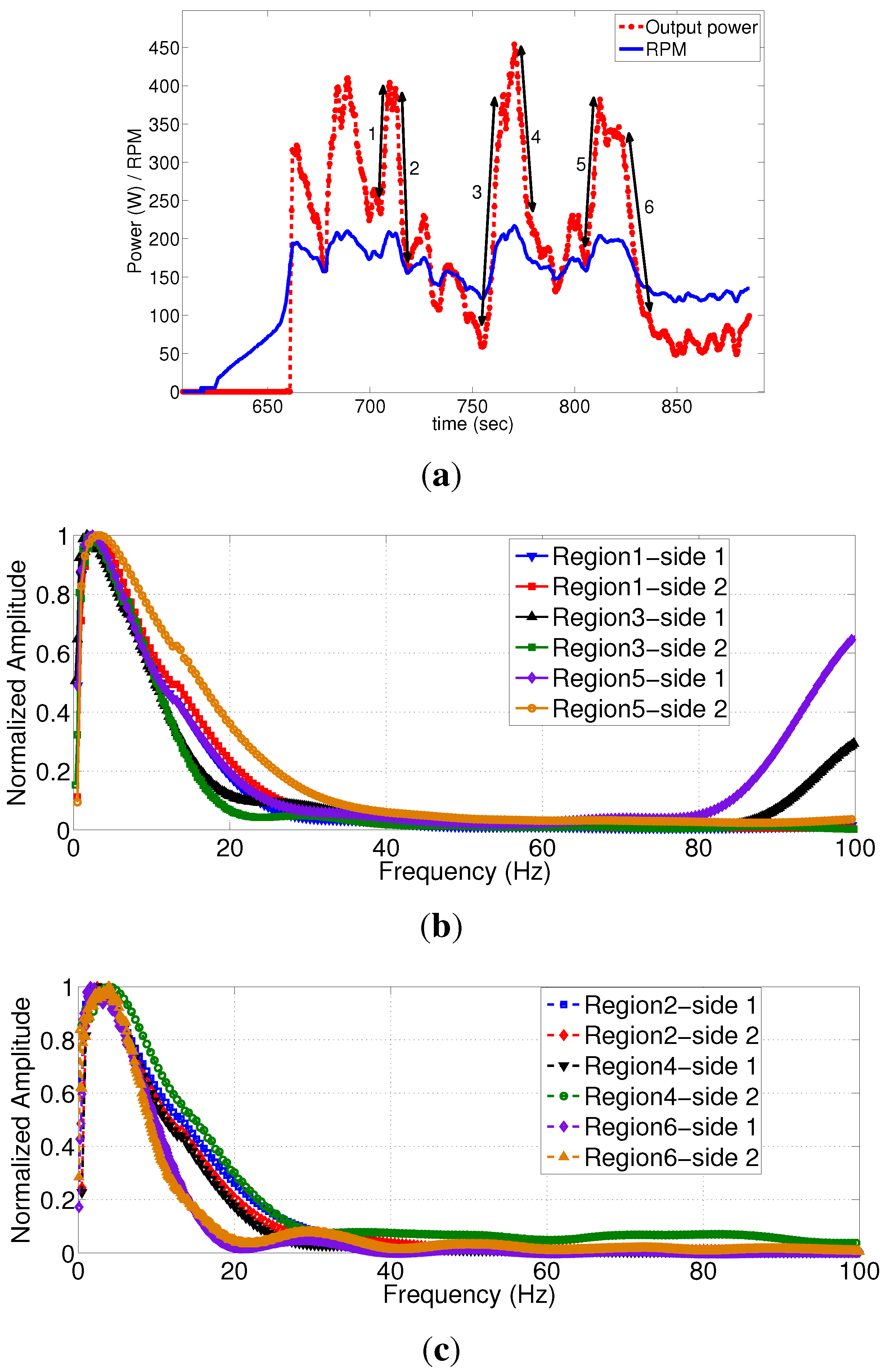
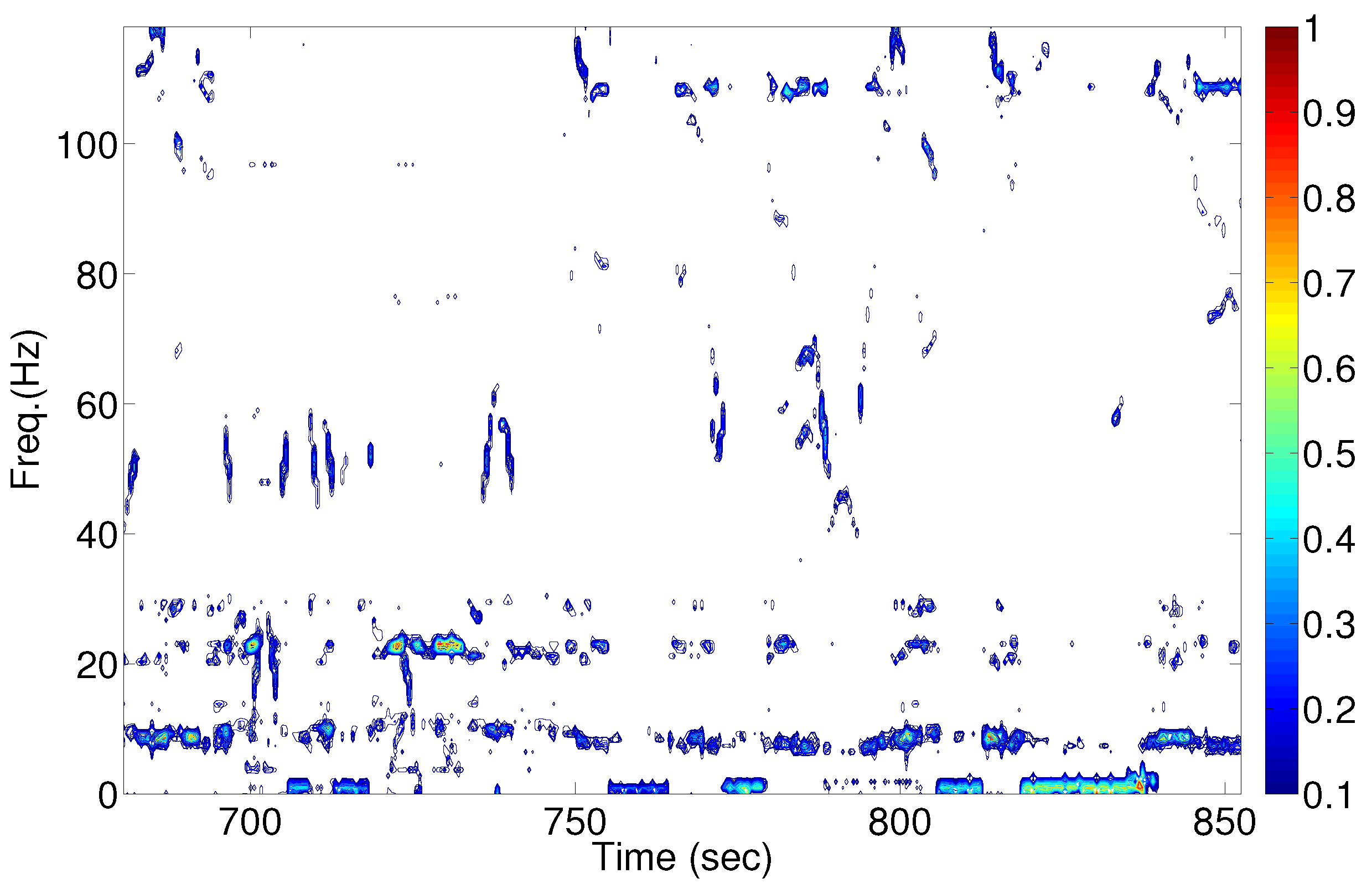
2.3.3. Short-Time Fourier Transform
3. Small Wind Turbine Noise
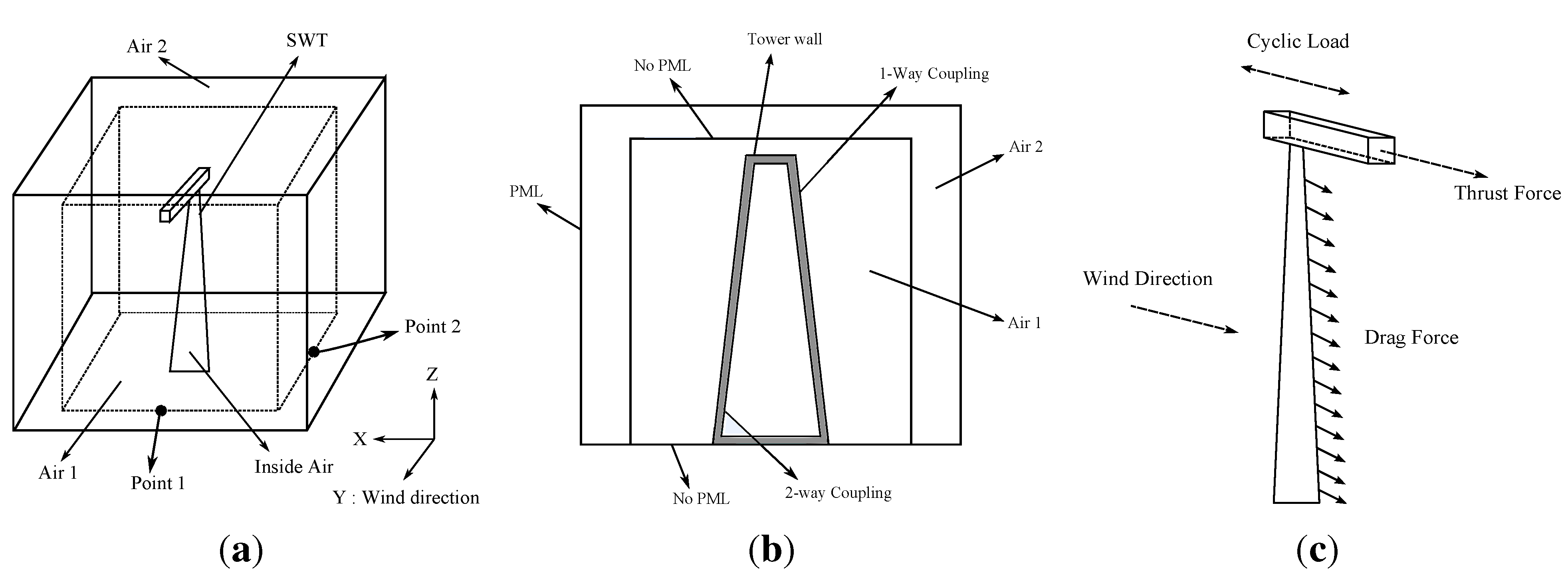
3.1. Acoustic Finite-Element Equations
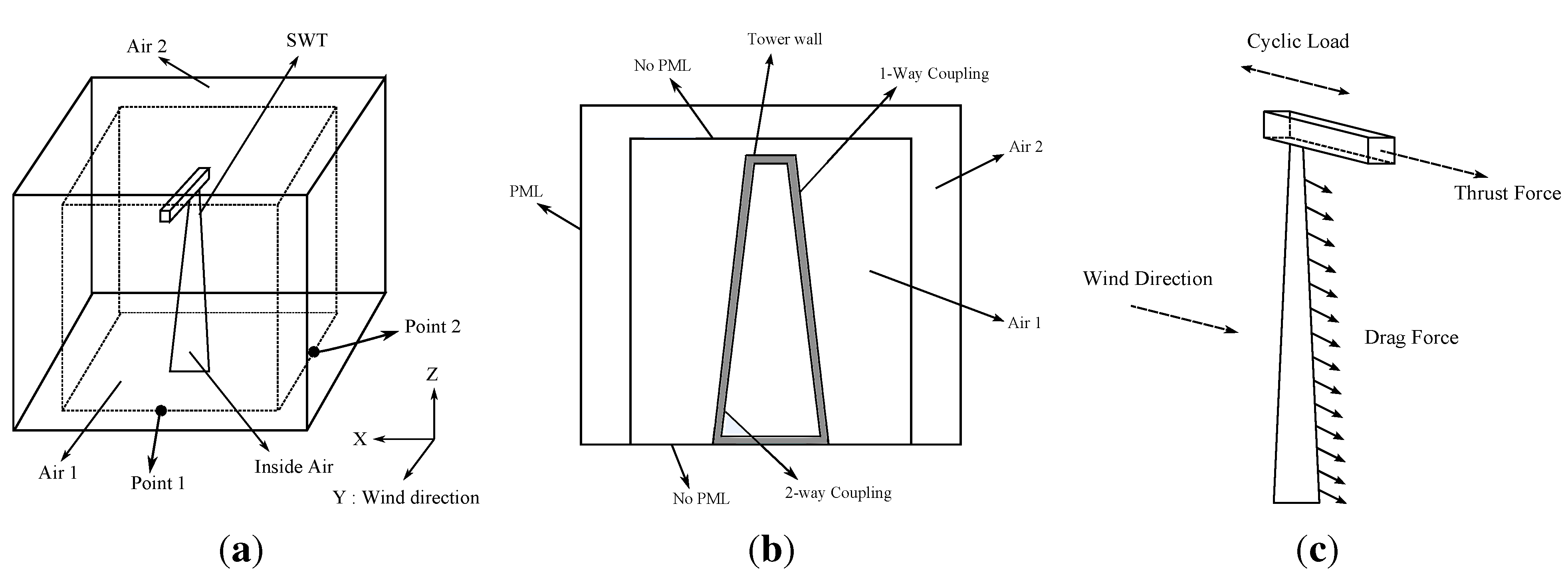
3.1.1. Coupling
3.2. Finite-Element Acoustic Analysis of Tower Noise Emission
3.3. Simulation
3.3.1. Thrust Force
3.3.2. Tower Drag
3.3.3. Cyclic Load
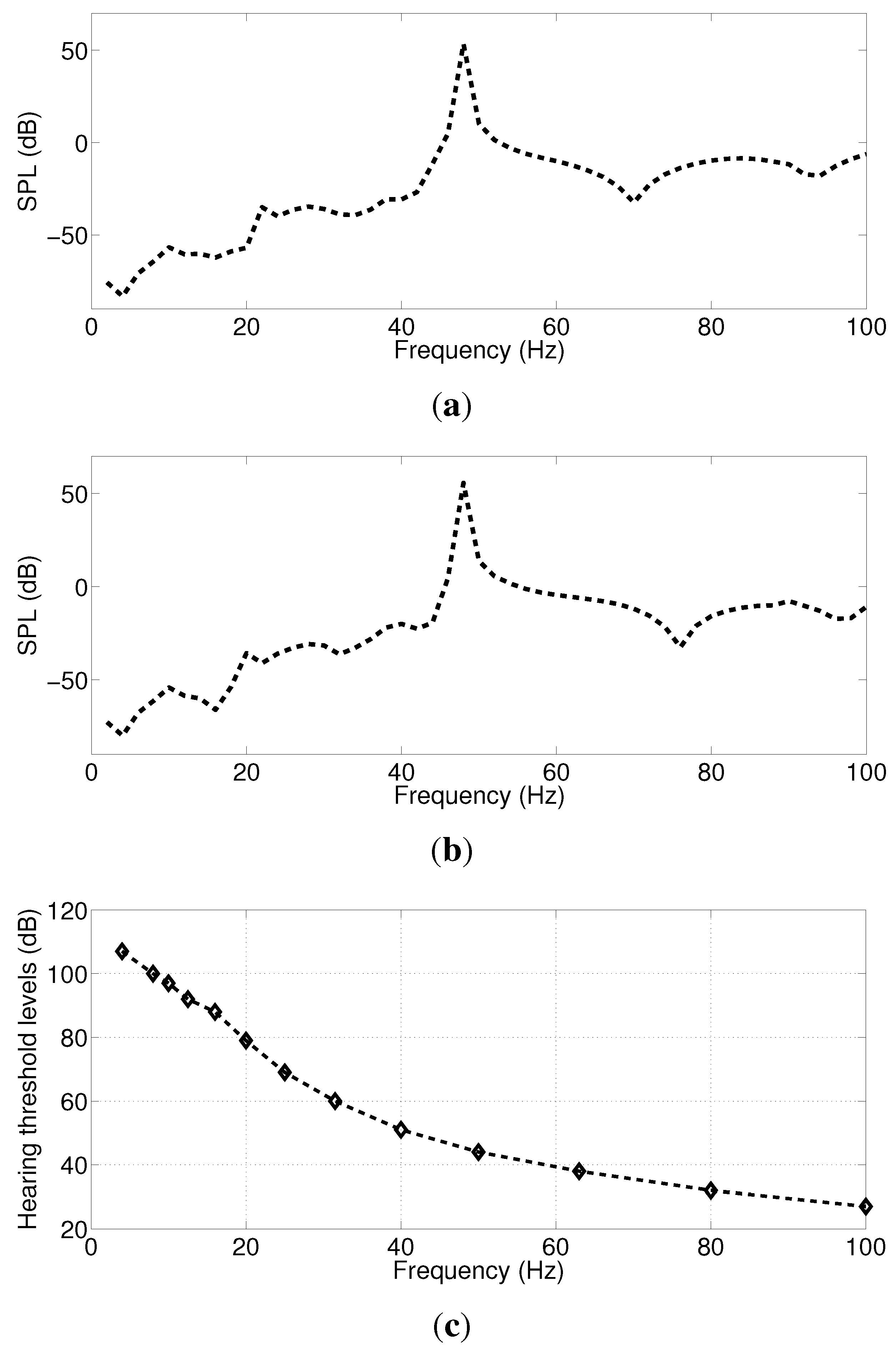
3.3.4. Harmonic Analysis
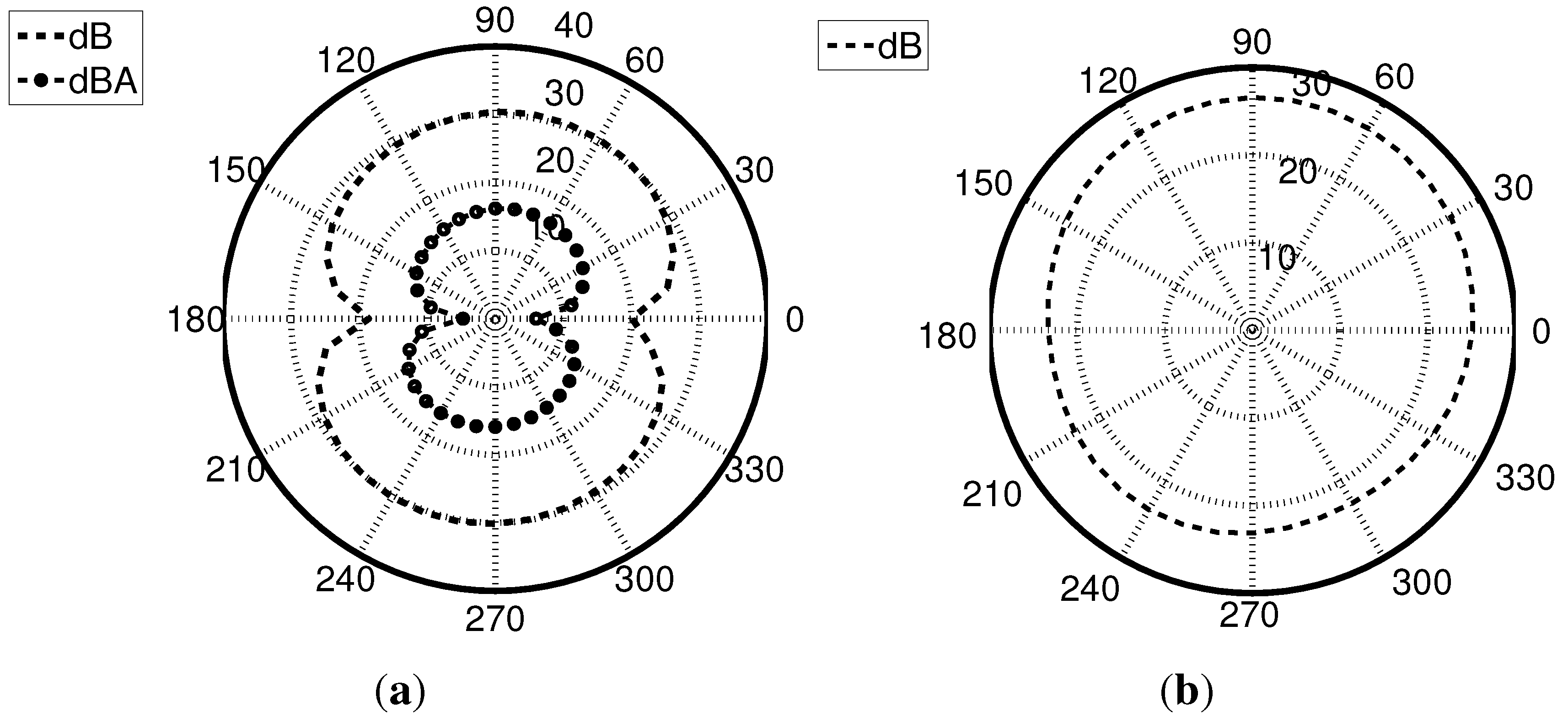
3.3.5. Source Type
4. Conclusions
Acknowledgments
References
- National Revewable Energy Laboratory (NREL). Wind Turbine Generator Systems-Part 11: Acoustic Noise Measurement Techniques; IEC 61400-11; International Electrotechnical Commission: Geneva, Switzerland, 2002.
- Boccard, N. Capacity factor of wind power realized values vs. estimates. Energy Policy 2009, 37, 2679–2688. [Google Scholar] [CrossRef]
- Lowson, M. Applications of aeroacoustic analysis to wind Turbine noise control. Wind Energy 1992, 16, 126–140. [Google Scholar]
- Pedersen, E.; Waye, K. Perception and annoyance due to wind turbine noise—A dose–response relationship. J. Acoust. Soc. Am. 2004, 116, 3460–3470. [Google Scholar] [CrossRef] [PubMed]
- Rogers, A.; Manwell, J.; Wright, S. Wind Turbine Acoustic Noise; Technical Report for Renewable Energy Research Laboratory: Amherst, MA, USA, 2006. [Google Scholar]
- James, G.; Carne, T.; Lauffer, J.; Nard, A. Modal Testing Using Natural Excitation. In Proceedings of the International Modal Analysis Conference, San Diego, CA, USA, 3–6 February 1992; pp. 1208–1208.
- Bao, Z.W.; Ko, J.M. Determination of modal parameters of tall buildings with ambient vibration measurements. Int. J. Anal. Exp. Modal Anal. 1991, 6, 57–68. [Google Scholar]
- Prevosto, D.; Benveniste, A.; Bonnecase, D. Application of a Multidimensional ARMA Model to Modal Analysis under Natural Excitation. In Proceedings of the 8th International Modal Analysis Conference, Kissimmee, FL, USA, 29 January–1 February 1990; Volume 1, pp. 382–388.
- Peeters, B.; de Roeck, G. Stochastic system identification for operational modal analysis: A review. J. Dyn. Syst. Meas. Control 2001, 123, 659–667. [Google Scholar] [CrossRef]
- James, G.H., III; Carne, T.G.; Lauffer, J.P. The Natural Excitation Technique (NExT) for Modal Parameter Extraction from Operating Wind Turbines; Technical Report for Sandia National Labs: Albuquerque, NM, USA, 1993. [Google Scholar]
- Zhang, L.; Wang, T.; Tamura, Y. A frequency–spatial domain decomposition (FSDD) method for operational modal analysis. Mech. Syst. Signal Process. 2010, 24, 1227–1239. [Google Scholar] [CrossRef]
- James, G.; Carne, T.; Mayes, R. Modal Parameter Extraction from Large Operating Structures Using Ambient Excitation. In Proceedings of the International Society for Optical Engineering, Denver, CO, USA, 5–6 August 1996; pp. 77–83.
- Chauhan, S.; Hansen, M.; Tcherniak, D. Application of Operational Modal Analysis and Blind Source Separation/Independent Component Analysis Techniques to Wind Turbines. In Proceedings of 27th International Modal Analysis Conference (IMAC XXVII), Orlando, FL, USA, 9–12 February 2009.
- Tcherniak, D.; Chauhan, S.; Rossetti, M.; Font, I.; Basurko, J.; Salgado, O. Output-Only Modal Analysis on Operating Wind Turbines: Application to Simulated Data. In Proceedings of the European Wind Energy Conference, Warsaw, Poland, 20–23 April 2010.
- Chauhan, S.; Tcherniak, D.; Hansen, M. Dynamic Characterization of Operational Wind Turbines Using Operational Modal Analysis. In Proceedings of China Wind Power, Beijing, China, 13–15 October 2010.
- Styles, P.; Westwood, R.; Toon, S. Monitoring and Modelling the Vibrational Effects of Small Wind Turbines on the Eskdalemuir IMS Station. In Proceedings of the 4th International Meeting on Wind Turbine Noise, Rome, Italy, 11–14 April 2011.
- Brincker, R.; Zhang, L.; Andersen, P. Modal Identification from Ambient Responses Using Frequency Domain Decomposition. In Proceedings of the 18th International Modal Analysis Conference, San Antonio, TX, USA, 7–10 February 2000; pp. 625–630.
- Shih, C.; Tsuei, Y.; Allemang, R.; Brown, D. Complex mode indication function and its applications to spatial domain parameter estimation. Mech. Syst. Signal Process. 1988, 2, 367–377. [Google Scholar] [CrossRef]
- Brincker, R.; Zhang, L.; Andersen, P. Output-Only Modal Analysis by Frequency Domain Decomposition. In Proceedings of the 25th International Conference on Noise and Vibration Engineering, Leuven, Belgium, 13–15 September 2000; Volume 2, pp. 717–723.
- Southwest Windpower. Available online: http://www.windenergy.com/products/skystream/skystream-3.7 (accessed on 7 April 2013).
- Wood, D. Noise Measurement and Prediction for Small Wind Turbines. In Proceedings of the 35th Annual Australian and New Zealand Solar Energy Society Conference, Canberra, Australia, 1–3 December 1997.
- Huskey, A.; Meadors, M. Wind Turbine Generator System Acoustic Noise Report for the Whisper H40 Wind Turbine; NREL/EL-50034383National Renewable Energy LaboratoryGolden, CO, USA, 2001. [Google Scholar]
- Migliore, P.; van Dam, J.; Huskey, A. Acoustic Tests of Small Wind Turbines. In Proceedings of the 42nd AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 5–8 January 2004.
- Schenck, H.; Benthien, G. Numerical Solution of Acoustic-Structure Interaction Problems; Technical Report; Naval Ocean Systems Center: San Diego, CO, USA, 1989. [Google Scholar]
- Clayton, R.; Engquist, B. Absorbing boundary conditions for acoustic and elastic wave equations. Seismol. Soc. Am. 1977, 67, 1529–1540. [Google Scholar]
- Fang, B.; Kelkar, A.; Joshi, S.; Pota, H. Modelling, system identification, and control of acoustic–structure dynamics in 3-D enclosures. Control Eng. Pract. 2004, 12, 989–1004. [Google Scholar] [CrossRef]
- Marmo, B.; Carruthers, B. Modelling and Analysis of Acoustic Emissions and Structural Vibration in a Wind Turbine. In Proceedings of the COMSOL Conference, Paris, France, 14–19 November 2010.
- Yuhui, L. Wave Propagation Study Using Finite Element Analysis. Ph.D. Thesis, University of Illinois at Urbana-Champaign, Urbana, IL, USA, 2005. [Google Scholar]
- Desmet, W. A Wave Based Prediction Technique for Coupled Vibro-Acoustic Analysis. Ph.D. Thesis, University of Leuven, Leuven, Belgium, 1998. [Google Scholar]
- Khan, M.; Cai, C.; Hung, K. Acoustics Field and Active Structural Acoustic Control Modeling in ANSYS. In Proceedings of the International ANSYS Conference, Pittsburgh, PA, USA, 22–24 April 2002.
- Howe, M. Acoustics of Fluid-Structure Interactions; Cambridge University Press: Cambridge, UK, 1998. [Google Scholar]
- Mollasalehi, E.; Sun, Q.; Wood, D. Low-Frequency Noise Propagation from a Small Wind Turbine Tower. In Proceedings of 2nd Symposium on Fluid-Structure-Sound Interactions and Control, Hong Kong and Macau, China, 20–23 May 2013.
- National Revewable Energy Laboratory (NREL). Wind Turbine-Part 2: Design Requirements for Small Wind Turbines, 2nd ed.International Electrotechnical Commission: Geneva, Switzerland, 2006.
- Wood, D. Small Wind Turbines: Analysis, Design, and Application; Springer: Berlin, Germany, 2011. [Google Scholar]
- Huleihil, M.; Mazor, G. Wind Turbine Power: The Betz Limit and Beyond. In Advances in Wind Power; InTech: Rijeka, Croatia, 2012. [Google Scholar]
- Moorhouse, A.; Waddington, D.; Adams, M. Proposed Criteria for the Assessment of Low Frequency Noise Disturbance; Technical Report NANR45; University of Salford: Salford, UK, 2005. [Google Scholar]
- Jakobsen, J. Infrasound emission from wind turbines. J. Low Freq. Noise Vib. Act. Control 2005, 24, 145–155. [Google Scholar] [CrossRef]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Mollasalehi, E.; Sun, Q.; Wood, D. Contribution of Small Wind Turbine Structural Vibration to Noise Emission. Energies 2013, 6, 3669-3691. https://doi.org/10.3390/en6083669
Mollasalehi E, Sun Q, Wood D. Contribution of Small Wind Turbine Structural Vibration to Noise Emission. Energies. 2013; 6(8):3669-3691. https://doi.org/10.3390/en6083669
Chicago/Turabian StyleMollasalehi, Ehsan, Qiao Sun, and David Wood. 2013. "Contribution of Small Wind Turbine Structural Vibration to Noise Emission" Energies 6, no. 8: 3669-3691. https://doi.org/10.3390/en6083669