Capacity Calculation of Shunt Active Power Filters for Electric Vehicle Charging Stations Based on Harmonic Parameter Estimation and Analytical Modeling


Abstract
:1. Introduction
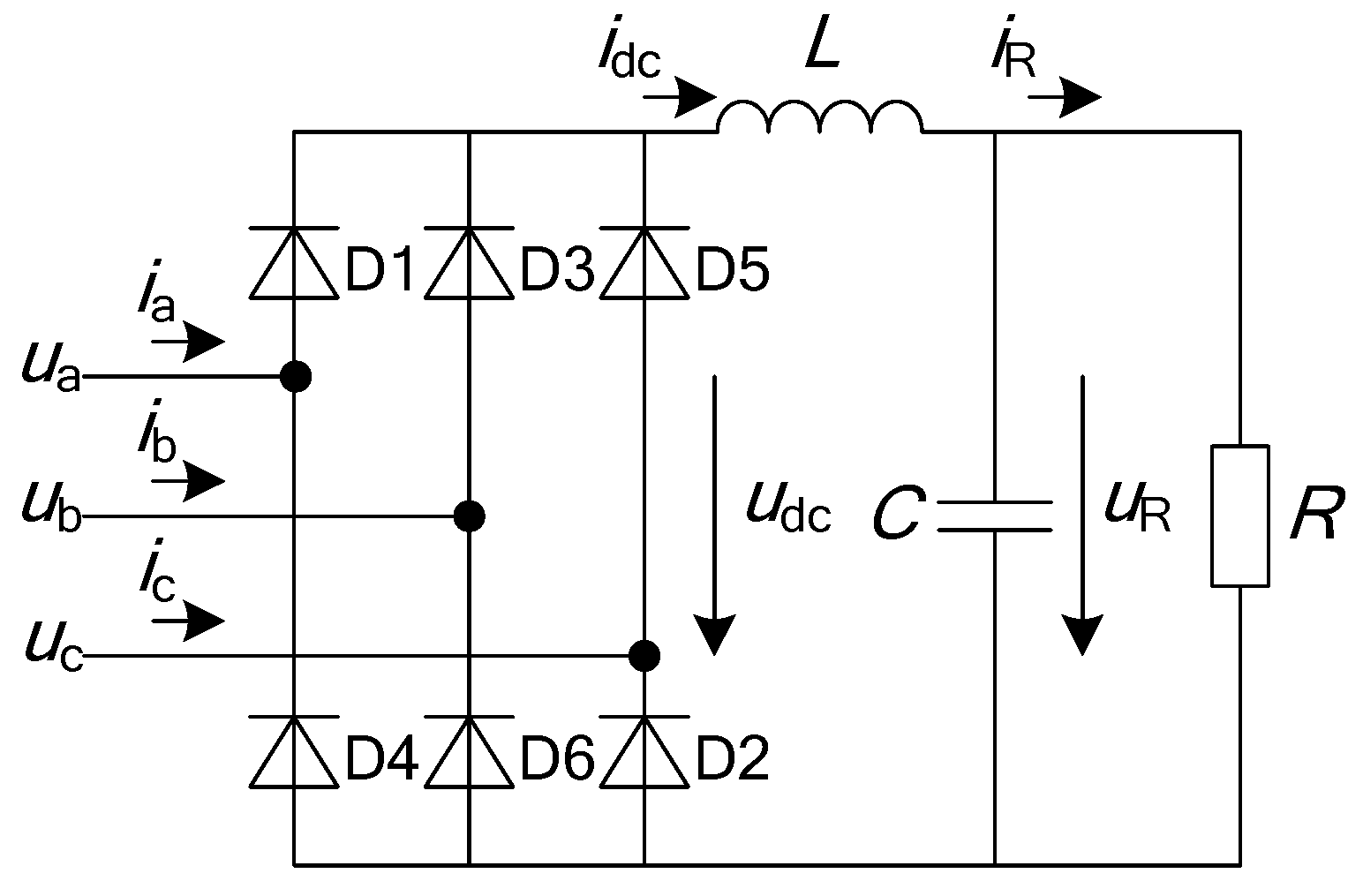
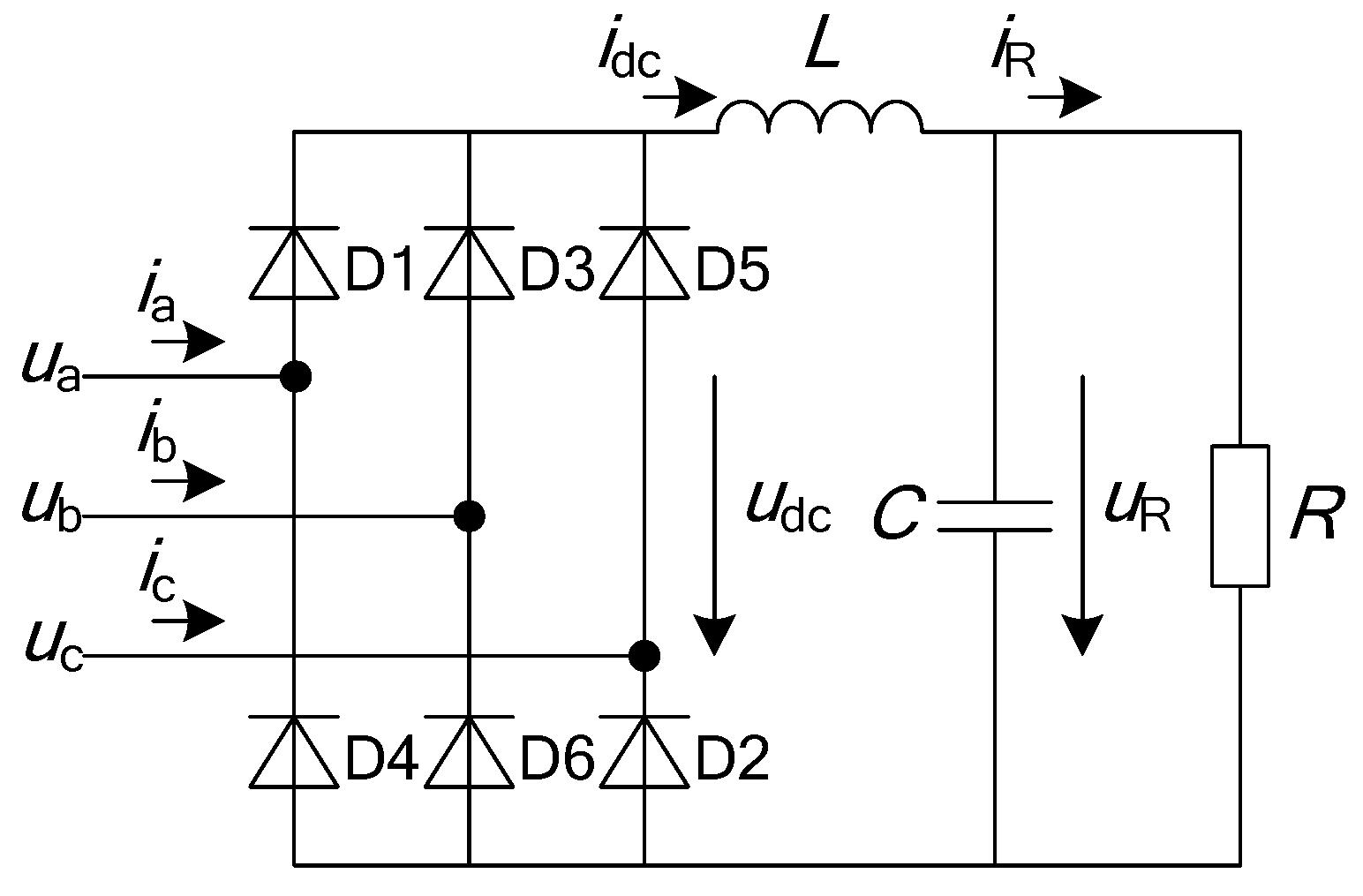
2. Parameter Estimation for the Equivalent Circuit of Charger

2.1. Estimation of the DC Voltage UR
2.2. Estimation of the Filter Inductance L
2.3. Estimation of the DC Load Resistance R and Filter Capacitance C
3. Verification and Sensitivity Analysis of the Charger Parameter Estimation
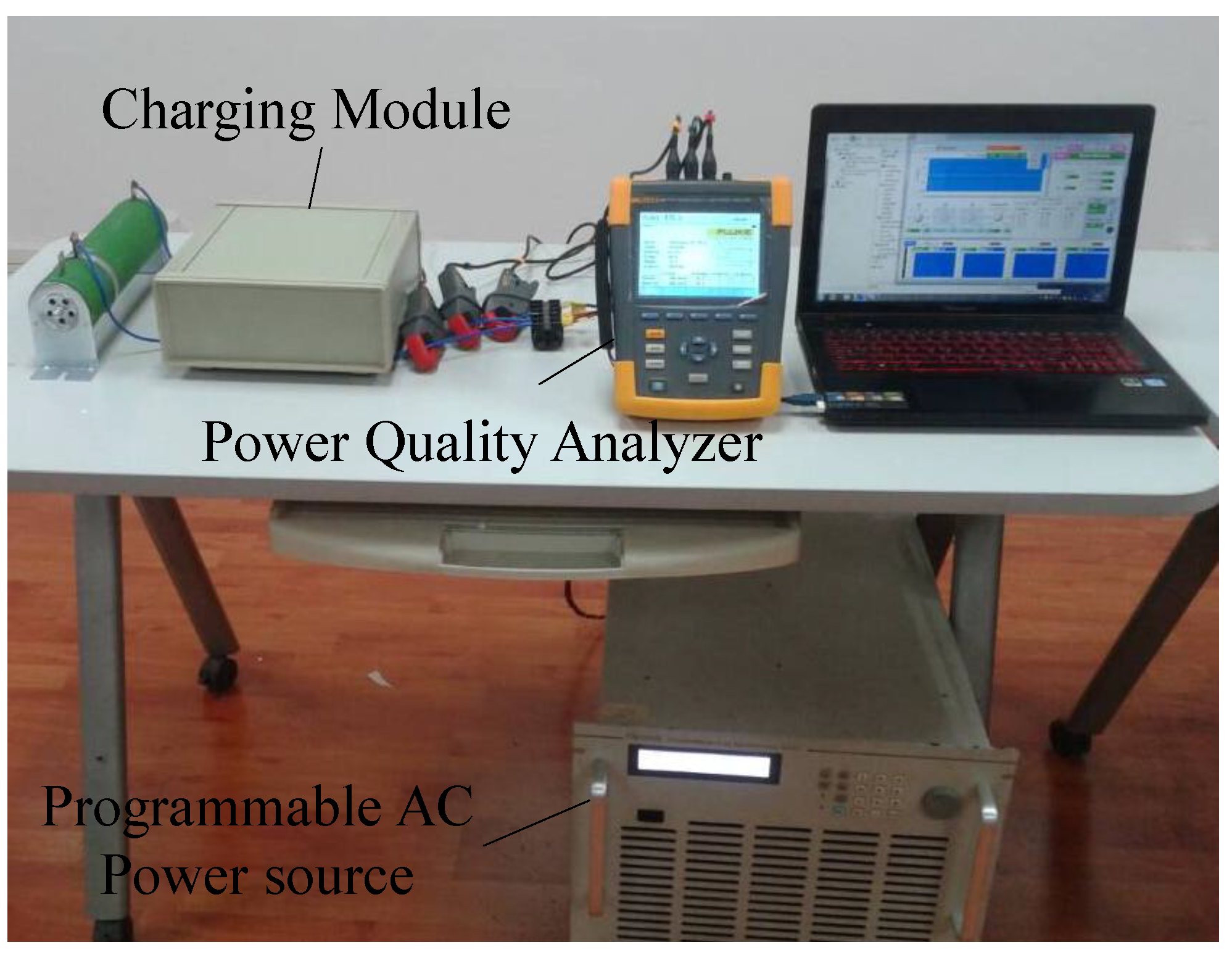
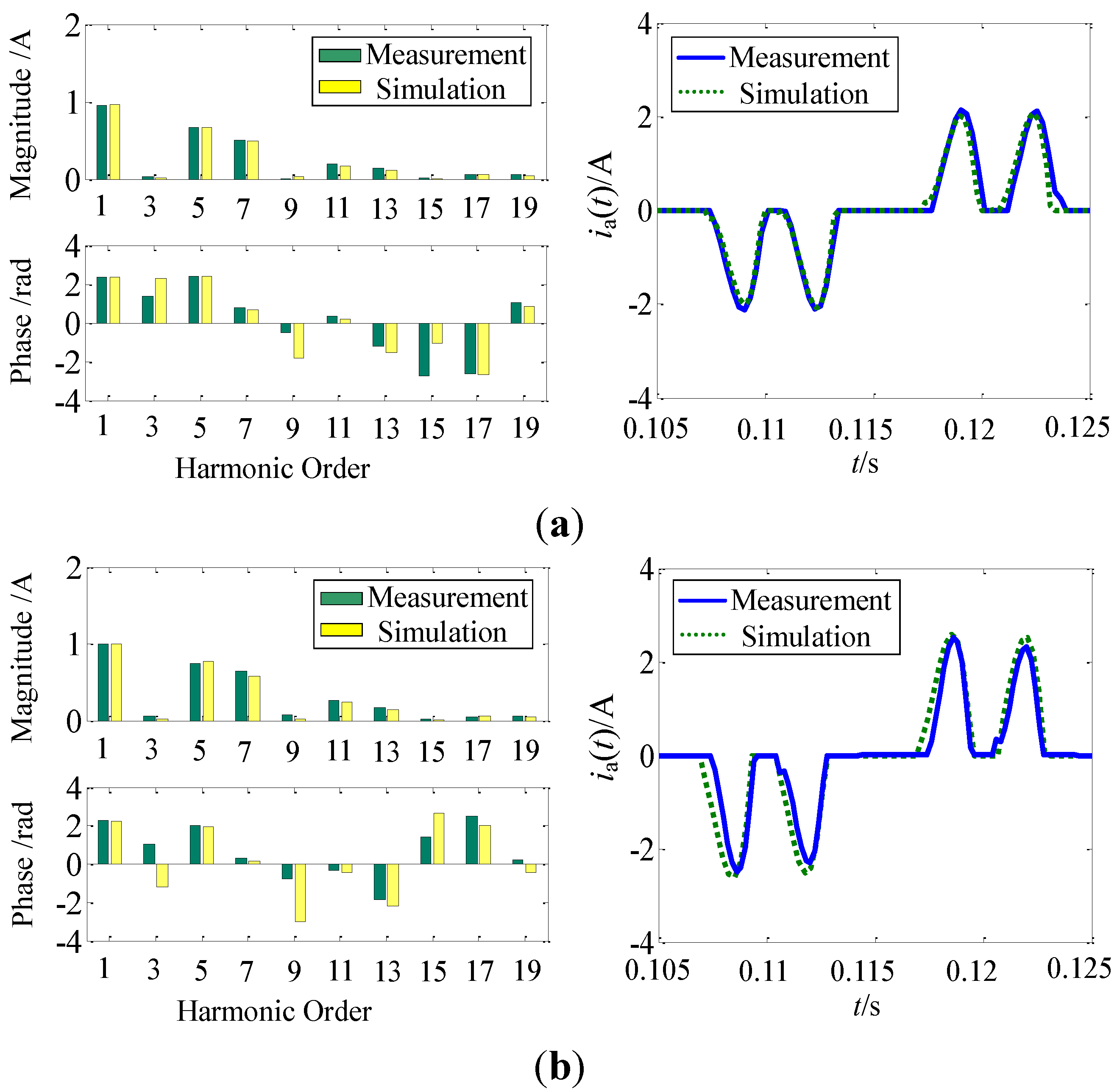
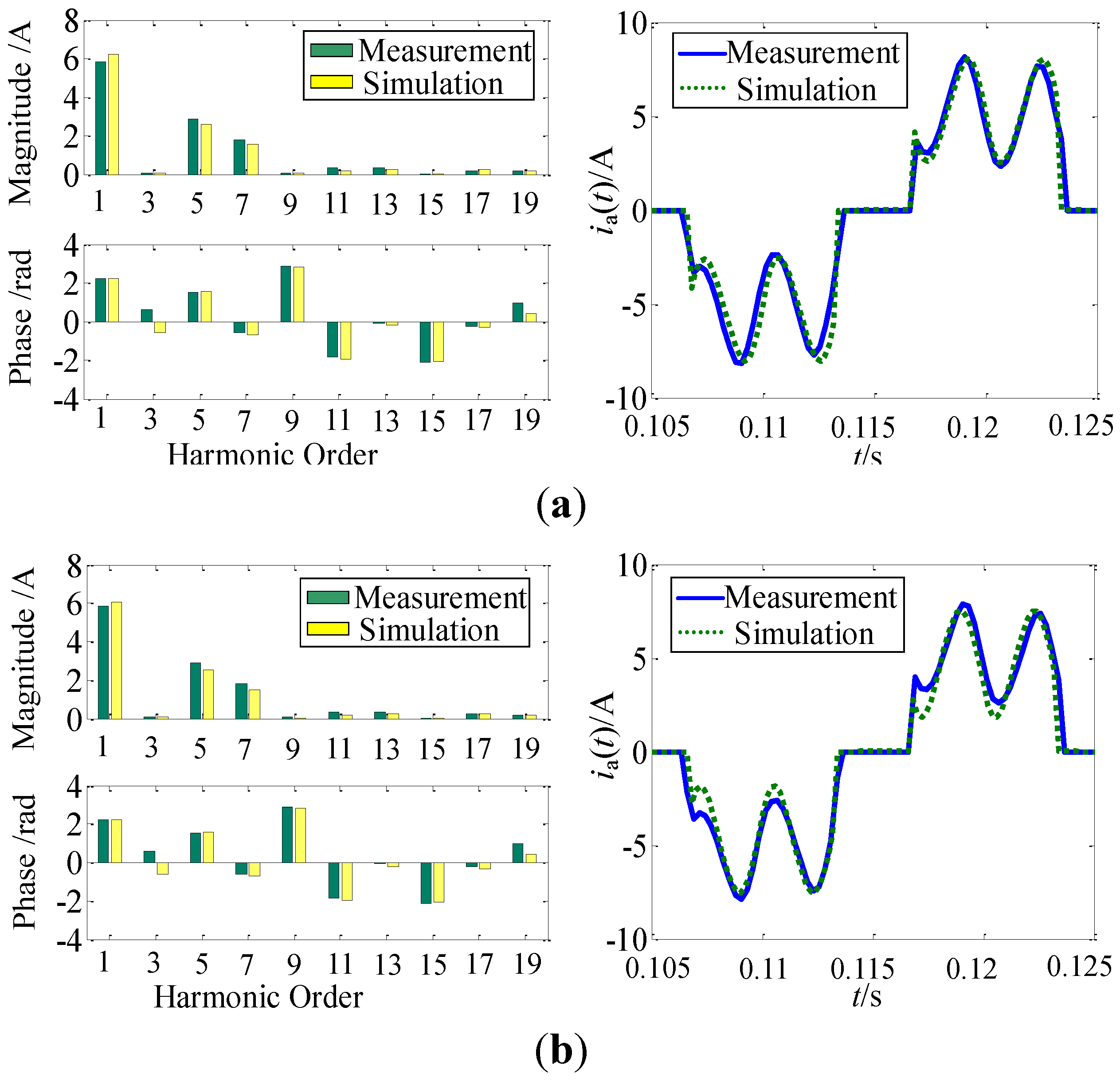
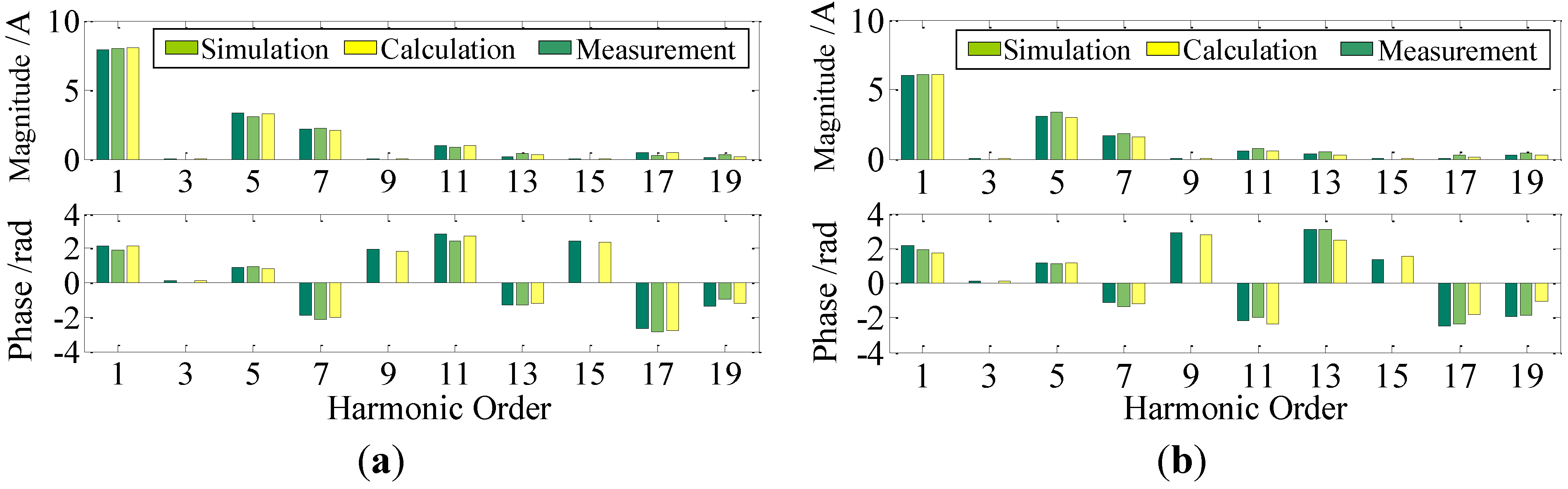
3.1. Verification of the Charger Parameter Estimation Method

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Harmonic Order | Magnitude/% | Phase/Rad | Harmonic Order | Magnitude/% | Phase/Rad | ||
|---|---|---|---|---|---|---|---|
| Case 1 | 3 | 0.51 | −1.52 | Case 2 | 3 | 3.5 | 6.57 |
| 5 | 0.32 | −2.82 | 5 | 2.3 | −8.51 | ||
| 7 | 0.43 | −6.36 | 7 | 2.1 | −8.36 | ||
| 9 | 0.41 | 2.35 | 9 | 1.2 | 2.35 | ||
| 11 | 0.29 | −8.29 | 11 | 0.4 | −14.49 | ||
| Case | Pc/kW | β/rad | Δγ/rad | Im/A | I0/A | Umax/V | |
|---|---|---|---|---|---|---|---|
| 1 | DCM | 0.091 | 0.852 | 0.502 | 2.129 | 0 | 110.3 |
| CCM | 0.556 | 1.052 | 0.722 | 8.137 | 3.228 | ||
| 2 | DCM | 0.095 | 0.785 | 0.481 | 2.594 | 0 | 112.1 |
| CCM | 0.557 | 1.052 | 0.691 | 7.91 | 3.61 | ||
| Case | α1/Rad | γ/Rad | UR/V | R/Ω | L/mH | C/µF | |
|---|---|---|---|---|---|---|---|
| 1 | DCM | 2.319 | 2.821 | 106.063 | 125 | 2.2 | 364 |
| CCM | 2.135 | 2.857 | 104.019 | 19.426 | |||
| 2 | DCM | 2.296 | 2.777 | 107.688 | 122.072 | 2.3 | 347 |
| CCM | 2.135 | 2.826 | 105.450 | 19.964 | |||
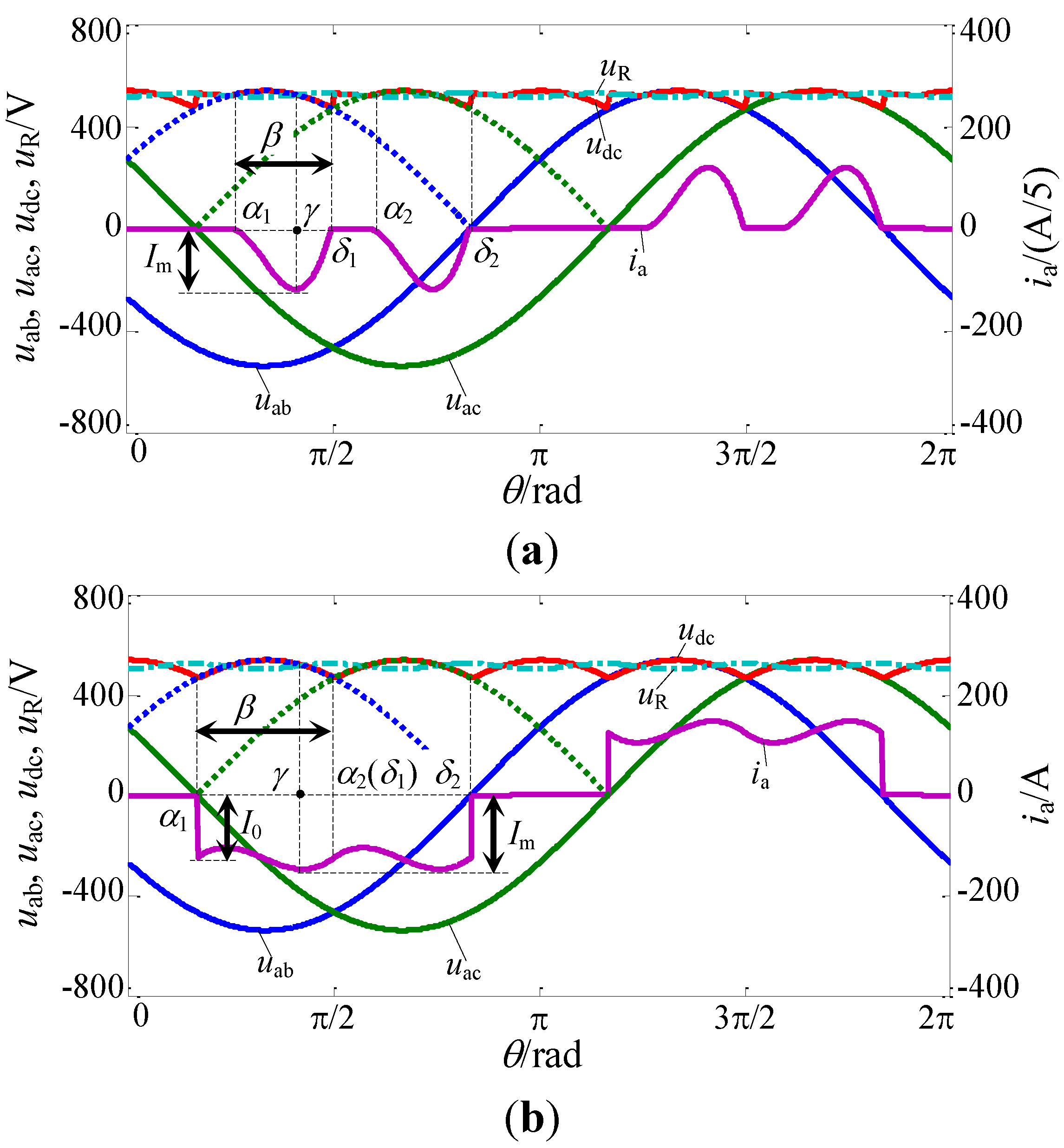
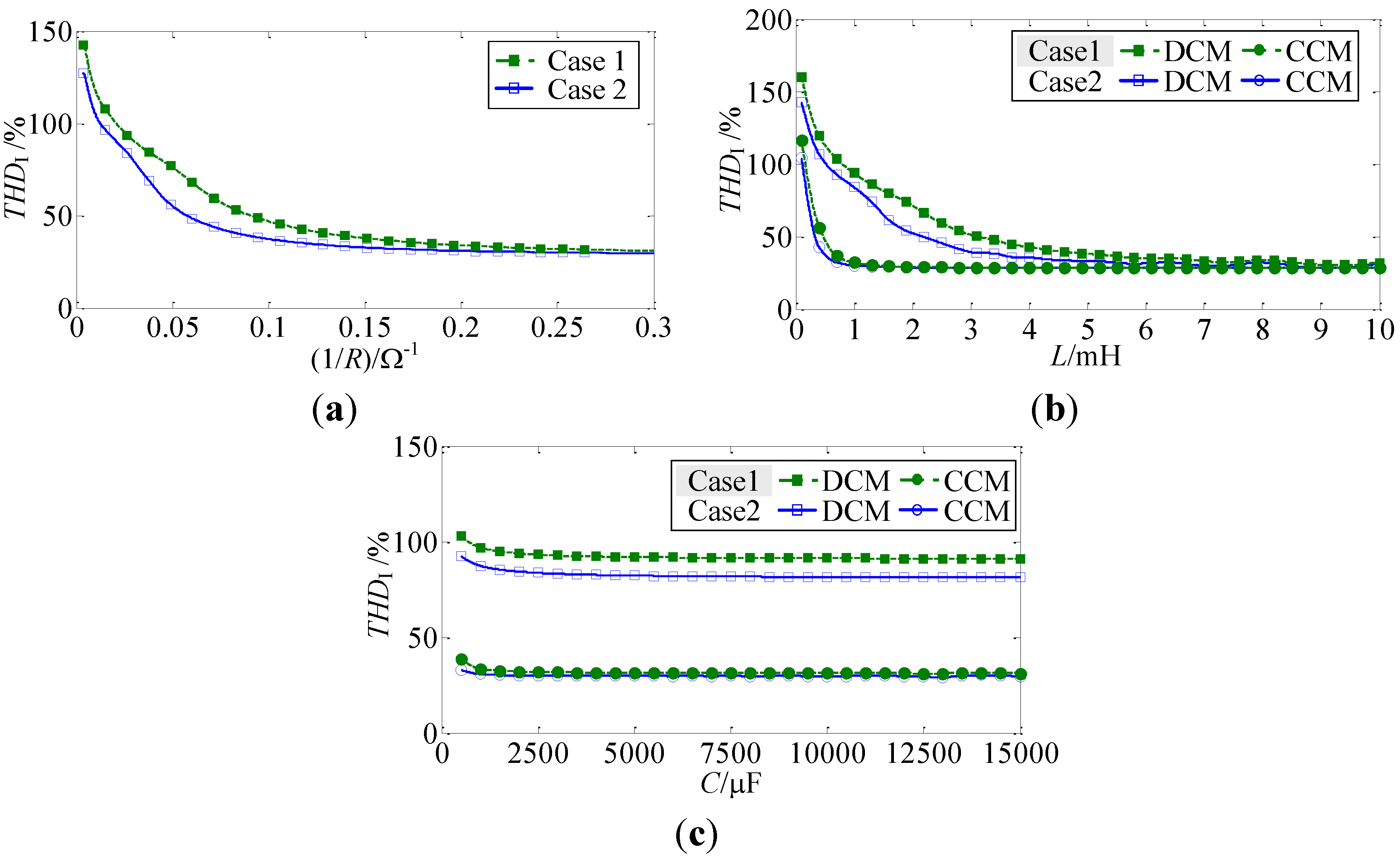
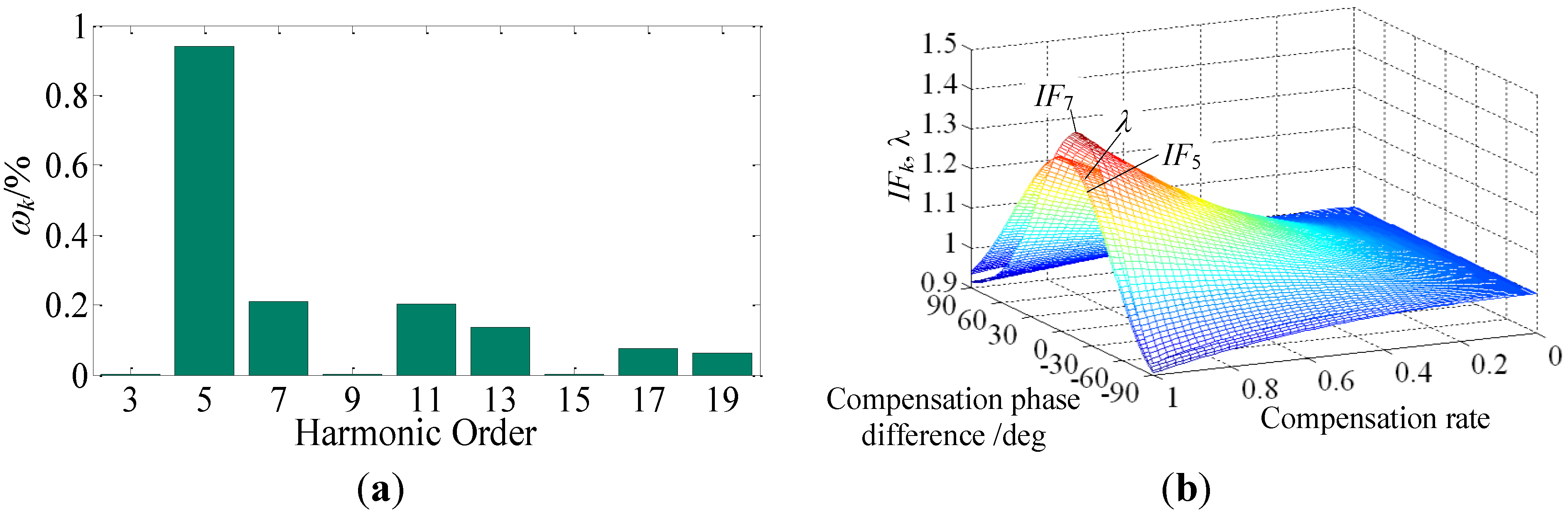
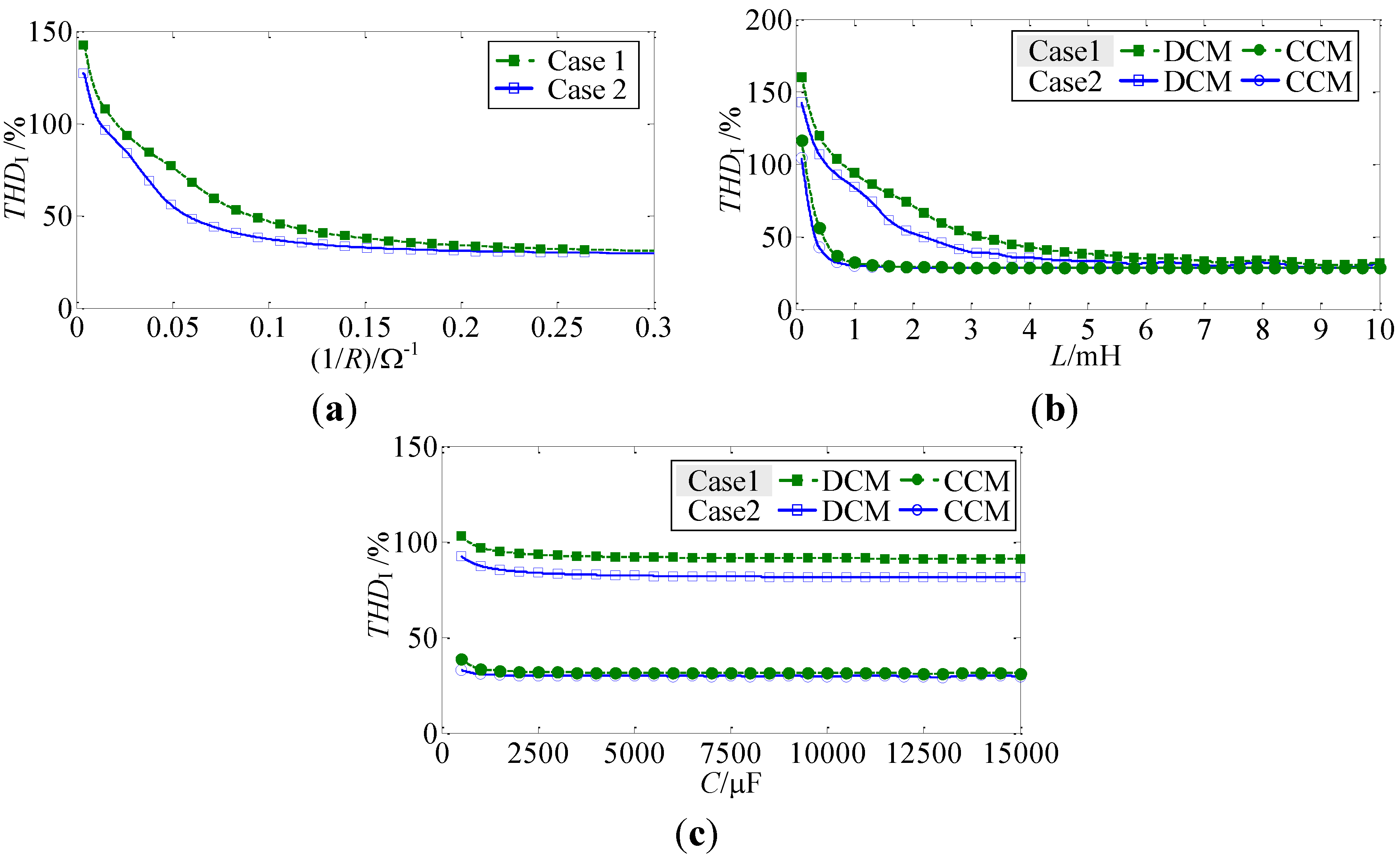
3.2. Sensitivity Analysis of the Harmonic Characteristics of the Charger
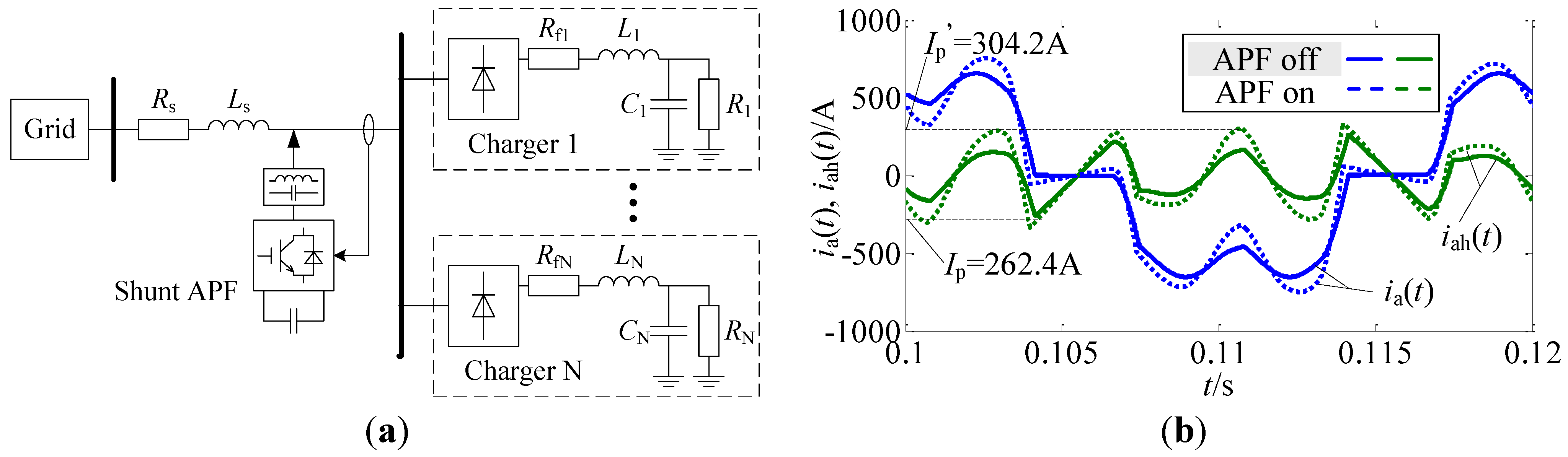
4. Capacity Correction for the Shunt Active Power Filter in a Charging Station Considering the Current Harmonic Amplification Effect
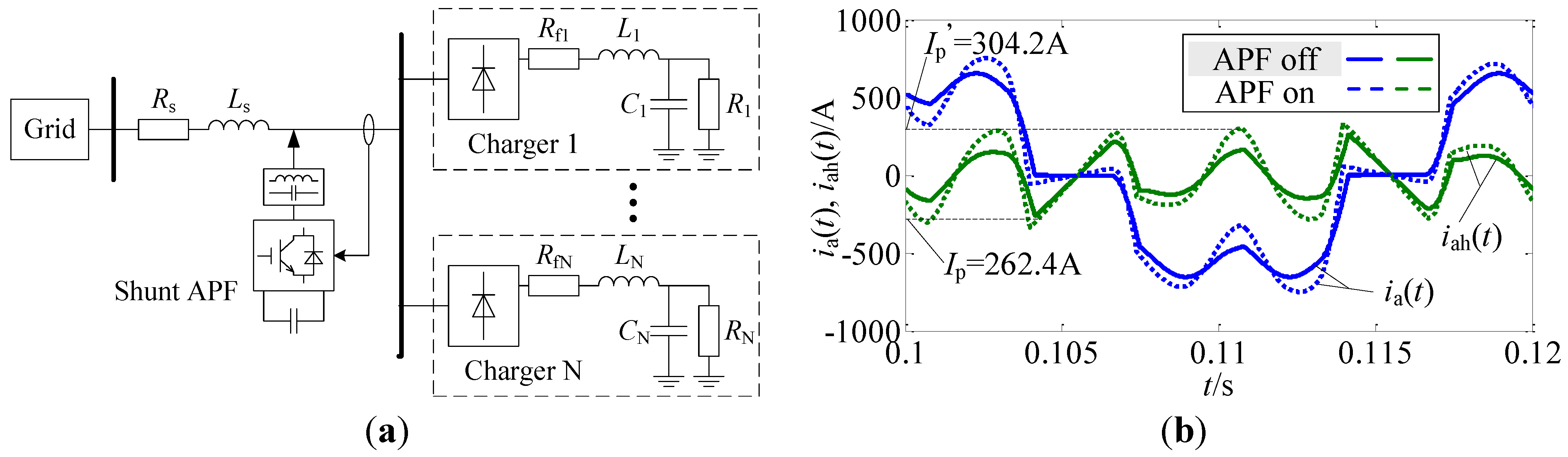
4.1. Charging Current Harmonic Amplification Effect and Frequency-Domain Harmonic Model of a Charging Station
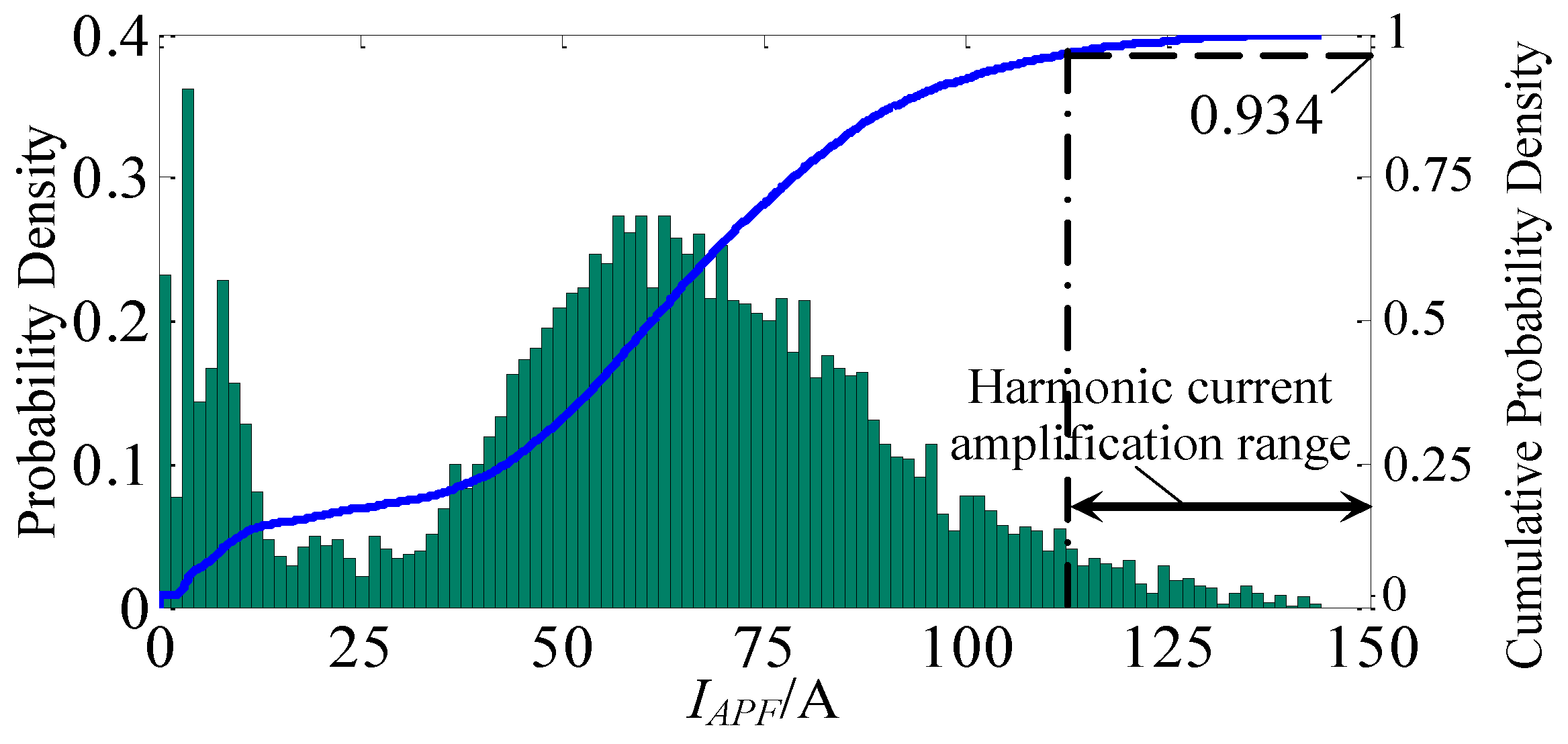
(1) Quantification of harmonic current amplification
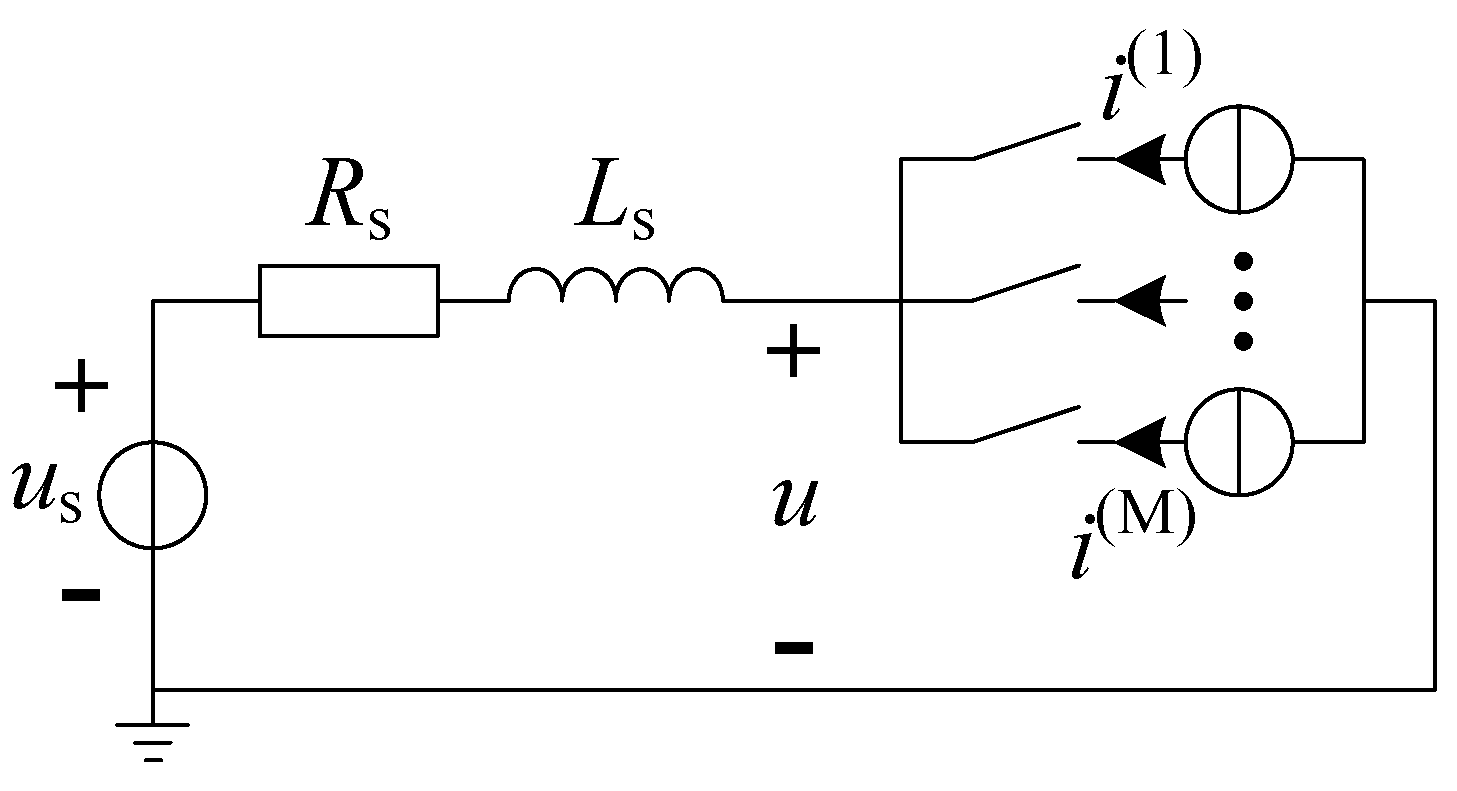
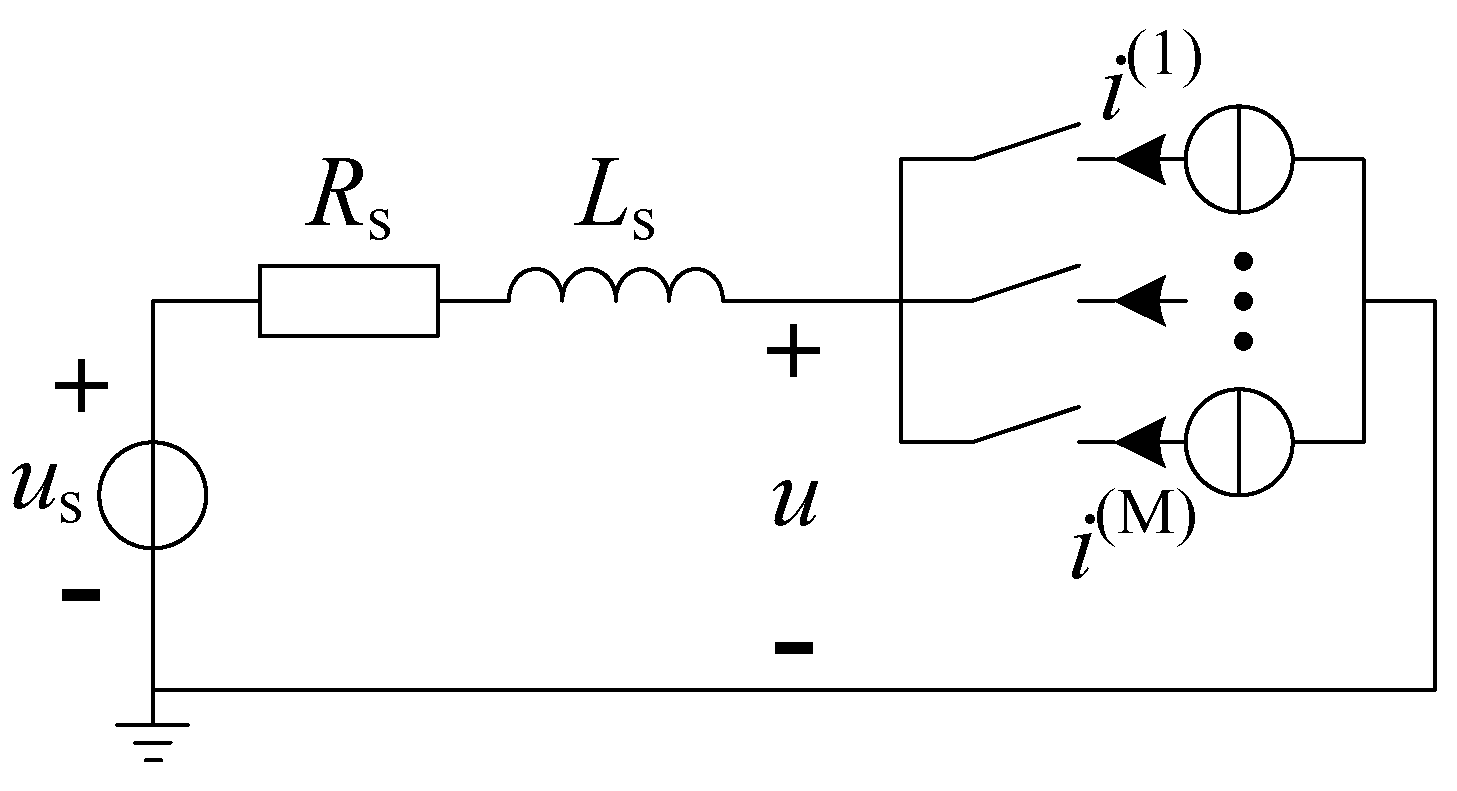
(2) Frequency-domain harmonic model of charger
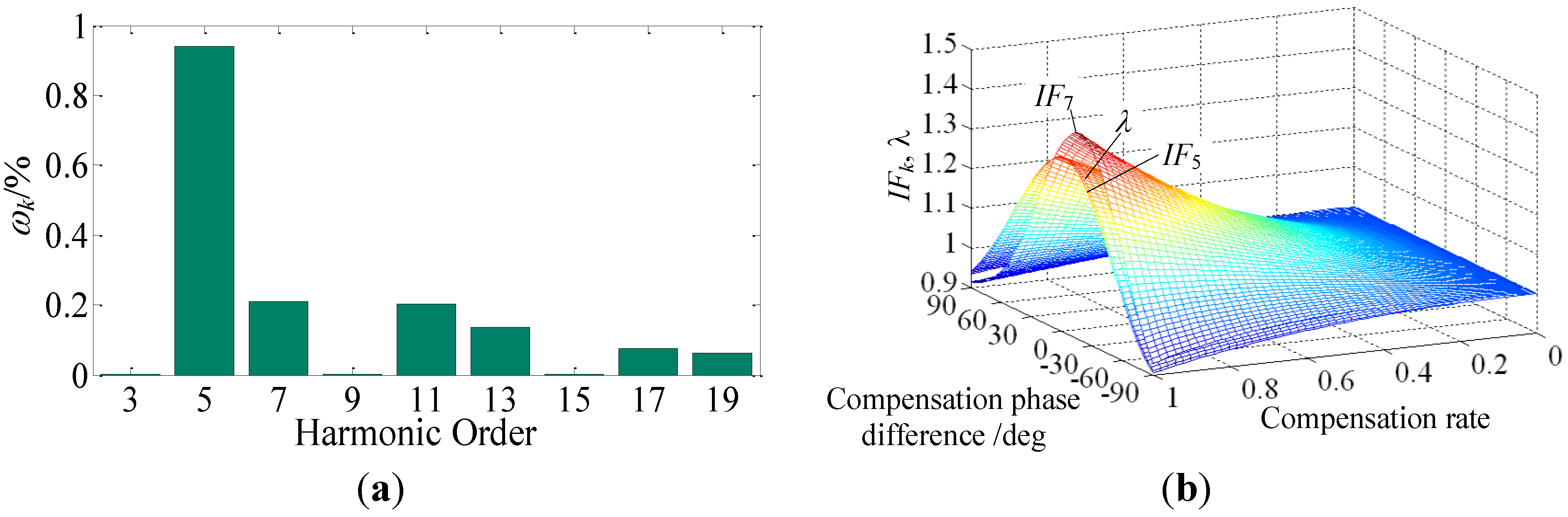
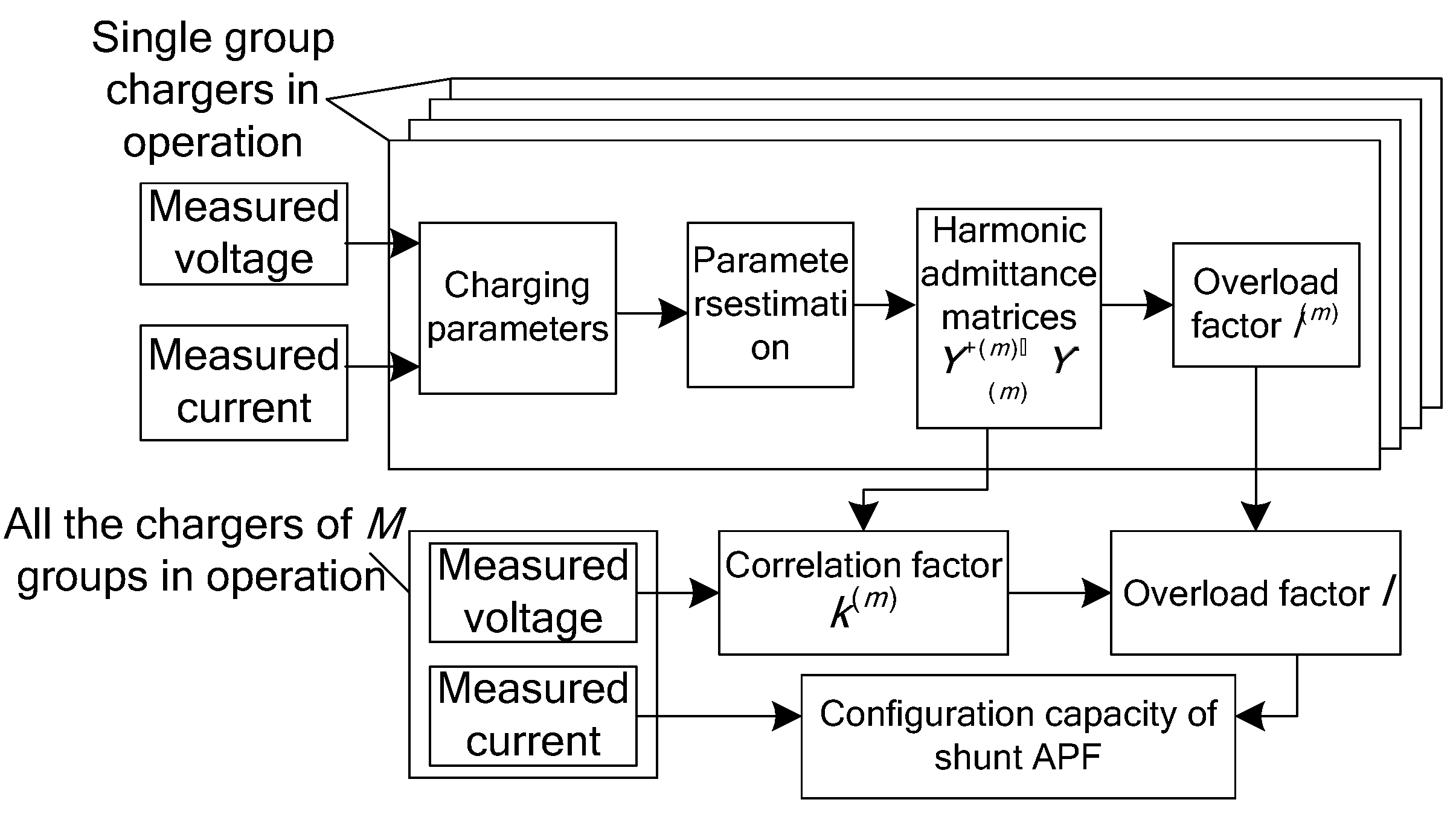
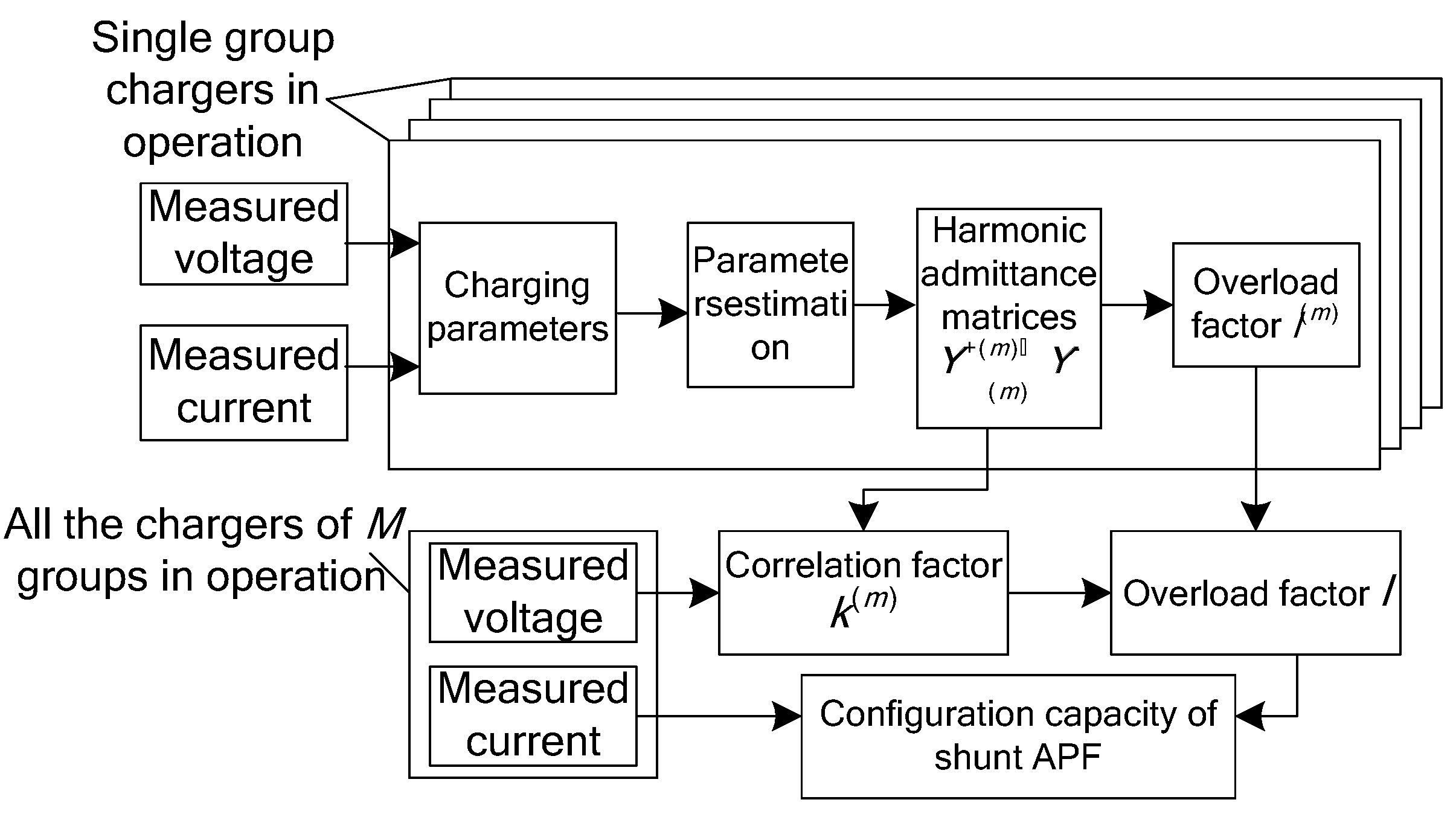
4.2. Capacity Correction Method for the Shunt APF in a Charging Station
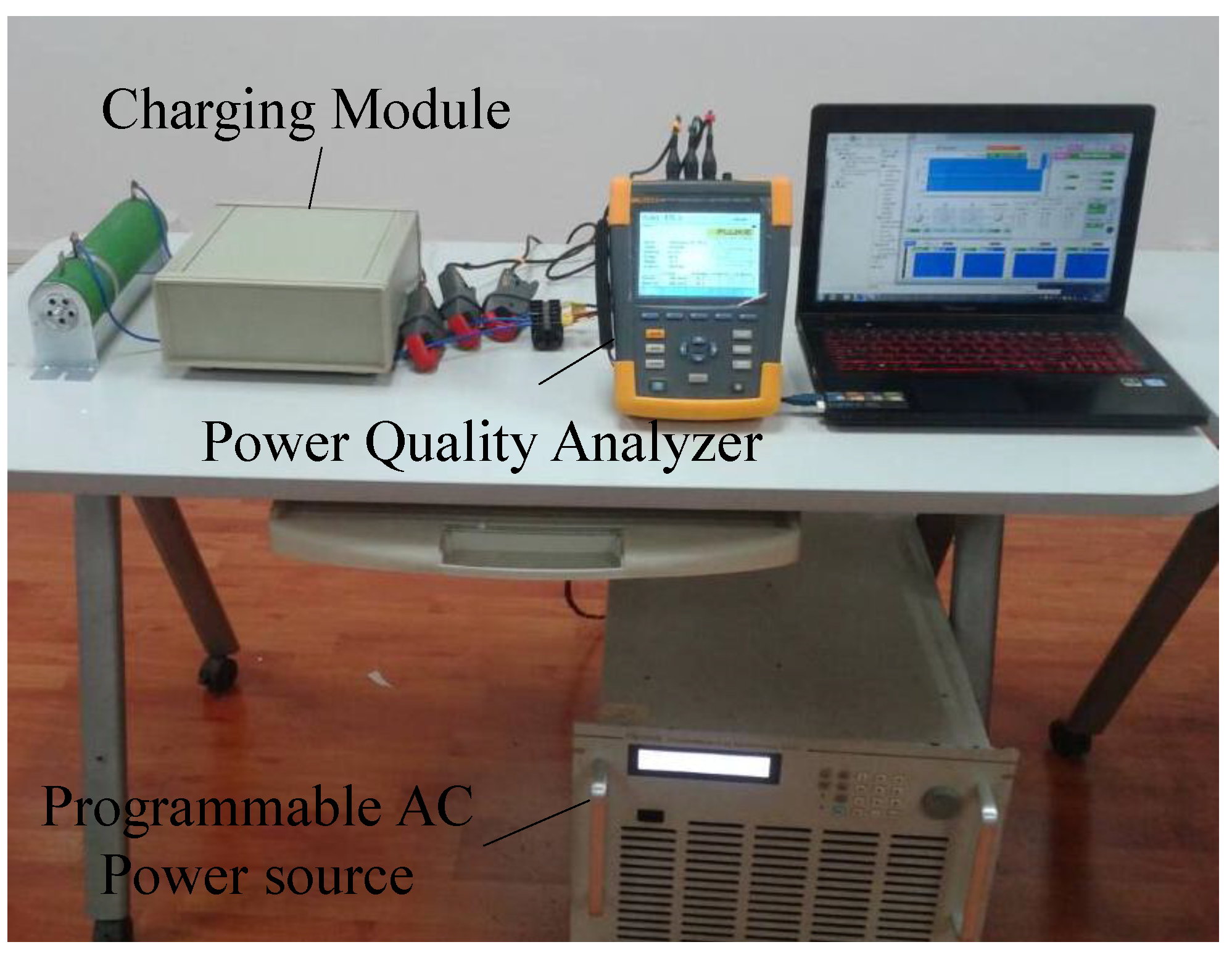
5. Field Test and Experimental Verification
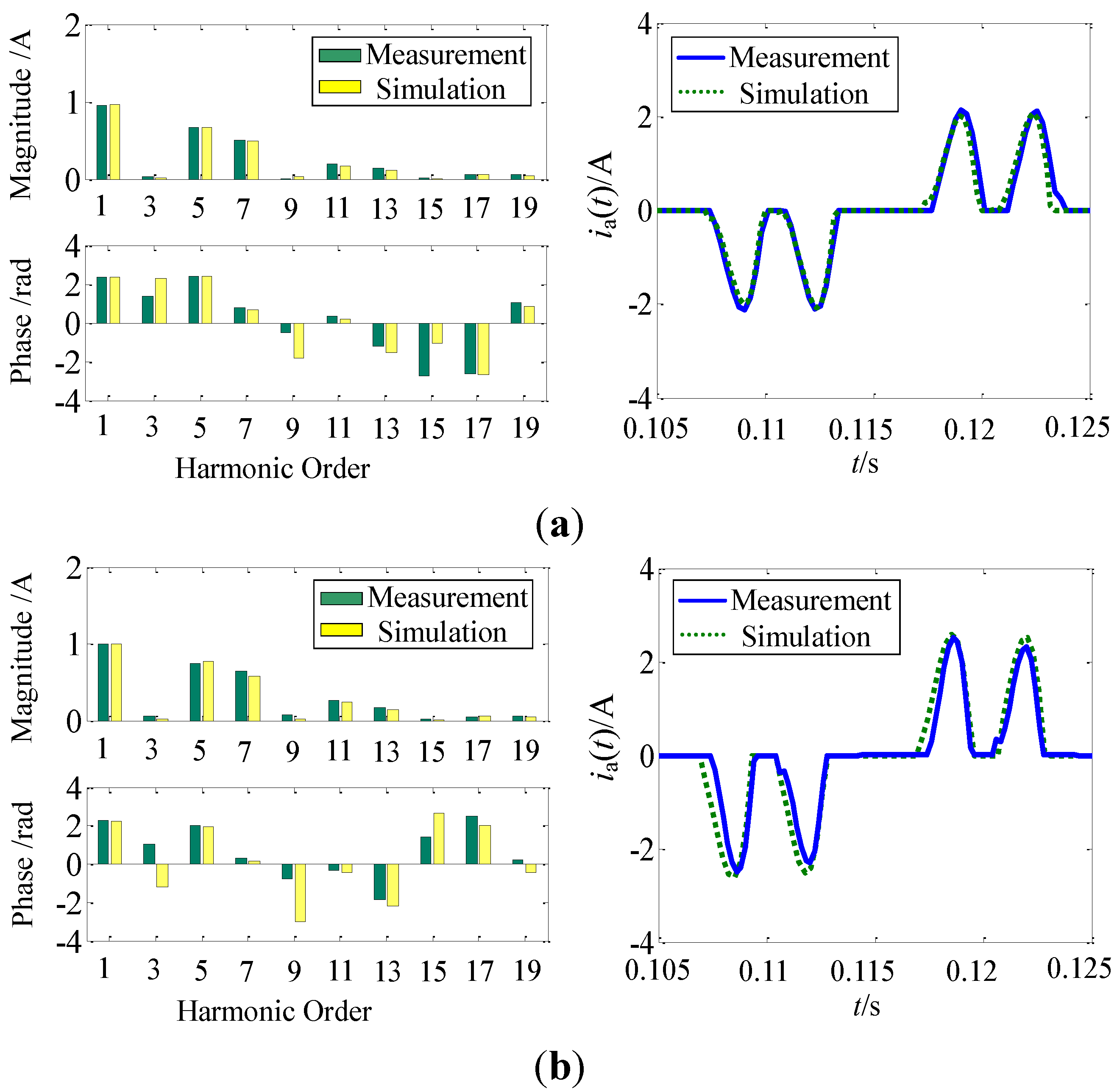
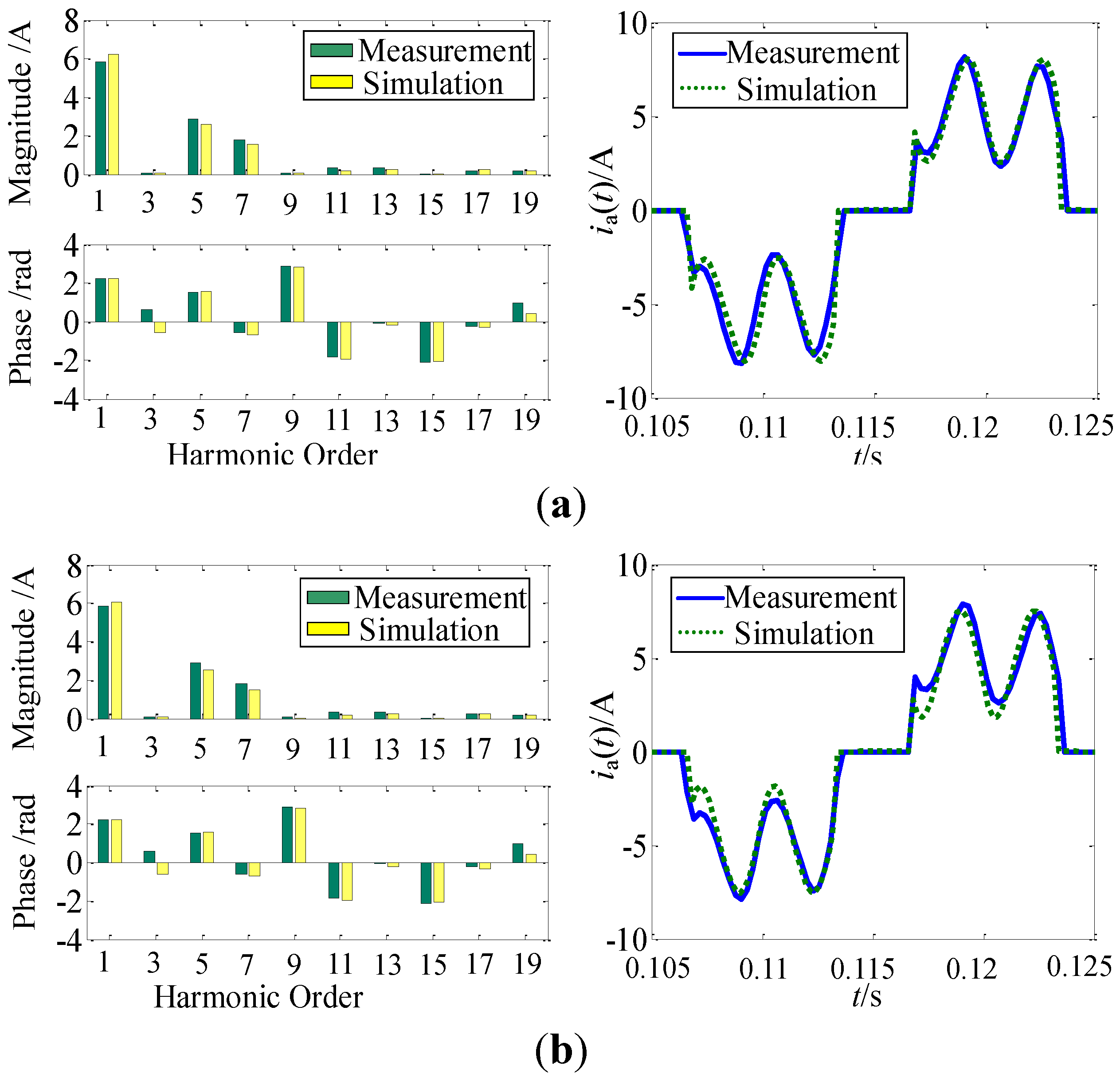
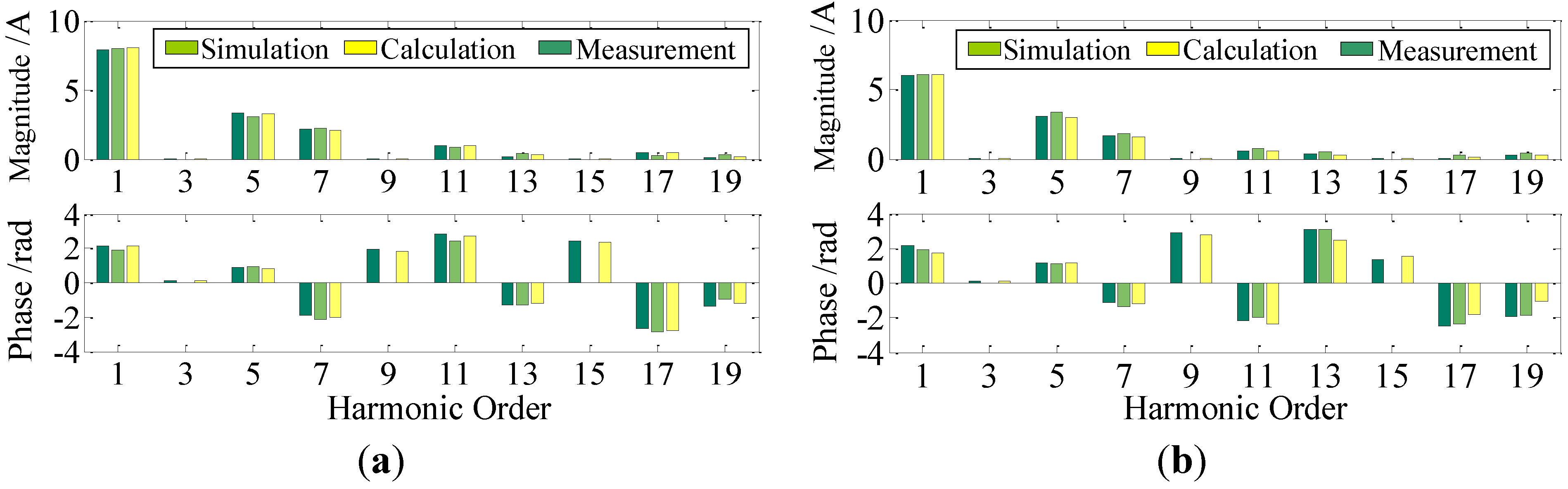
5.1. Verification of the Frequency-Domain Harmonic Model of A Charging Station
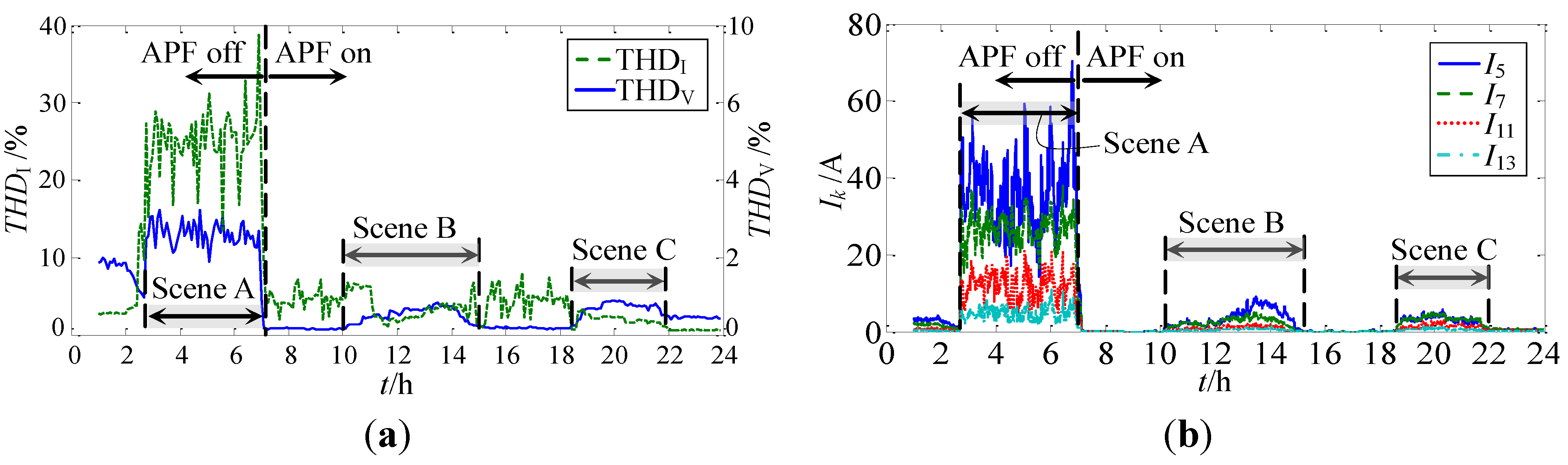
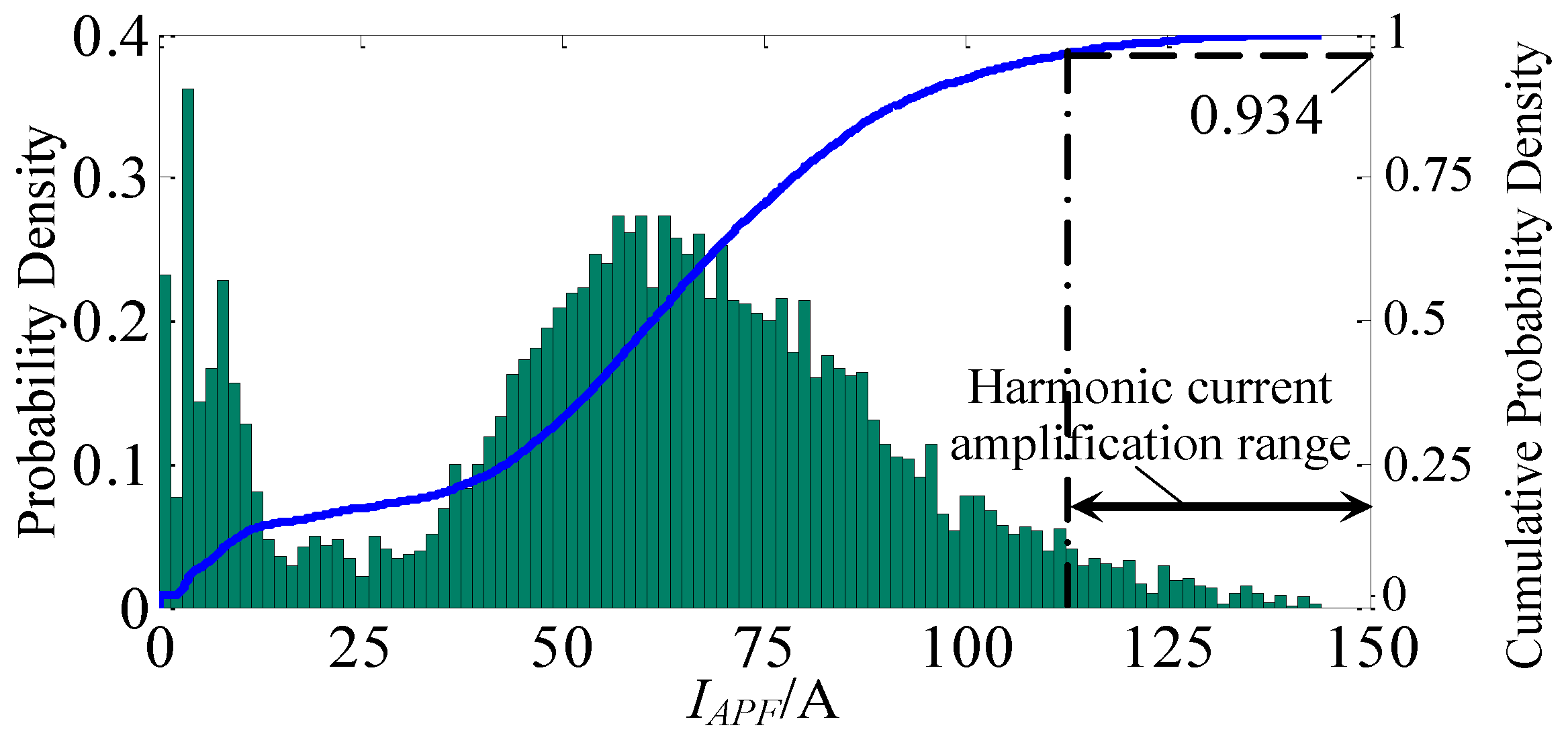
5.2. Verification of the Capacity Correction Method for the Shunt APF in a Charging Station

| Group | Estimated Parameters | k(m) | λ(m) | ||
|---|---|---|---|---|---|
| R/Ω | L/mH | C/µF | |||
| 1 | 2.6 | 0.26 | 8000 | 0.34 | 1.205 |
| 2 | 4.3 | 0.6 | 1600 | 0.32 | 1.347 |
| 3 | 3.8 | 0.24 | 9800 | 0.32 | 1.233 |
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Baptista, P.C.; Silva, C.M.; Peças Lopes, J.A.; Soares, F.J.; Almeida, P.R. Evaluation of the benefits of the introduction of electricity powered vehicles in an island. Energy Convers. Manag. 2013, 76, 541–553. [Google Scholar] [CrossRef]
- Kuperman, A.; Levy, U.; Goren, J.; Zafransky, A.; Savernin, A. Battery charger for electric vehicle traction battery switch station. IEEE Trans. Ind. Electron. 2013, 60, 5391–5399. [Google Scholar] [CrossRef]
- Etezadi-Amoli, M.; Choma, K.; Stefani, J. Rapid-charge electric-vehicle stations. IEEE Trans. Power Del. 2010, 25, 1883–1887. [Google Scholar]
- Yilmaz, M.; Krein, P.T. Review of battery charger topologies, charging power levels, and infrastructure for plug-in electric and hybrid vehicles. IEEE Trans. Power Electron. 2013, 28, 2151–2169. [Google Scholar] [CrossRef]
- Jiang, J.; Bao, Y.; Wang, L.Y. Topology of a bidirectional converter for energy interaction between electric vehicles and the grid. Energies 2014, 7, 4858–4894. [Google Scholar] [CrossRef]
- Jiang, C.; Salles, D.; Xu, W. Method to assess the power-quality impact of plug-in electric vehicles. IEEE Trans. Power Del. 2014, 29, 958–965. [Google Scholar] [CrossRef]
- Lucas, A.; Neto, R.C.; Silva, C.A. Impact of energy supply infrastructure in life cycle analysis of hydrogen and electric systems applied to the Portuguese transportation sector. Int. J. Hydrog. Energy 2012, 15, 10973–10985. [Google Scholar] [CrossRef]
- Lucas, A.; Neto, R.C.; Silva, C.A. Energy supply infrastructure LCA model for electric and hydrogen transportation systems. Energy 2013, 56, 70–80. [Google Scholar] [CrossRef]
- International Electrotechnical Commission. Electromagnetic Compatibility (EMC)—Part 3-2: Limits—Limits for Harmonic Current Emissions (Equipment Input Current 16 A per Phase); IEC Standard 1000-3-2; International Electrotechnical Commission (IEC): Geneva, Switzerland, 2000. [Google Scholar]
- Society of Automotive Engineers (SAE). Power Quality Requirements for Plug-In Electric Vehicle Chargers; SAE Standard J2894; SAE International: Warrendale, PA, USA, 2010. [Google Scholar]
- Verma, A.K.; Singh, B.; Shahani, D.T. Electric vehicle and grid interface with modified PWM rectifier and DC-DC converter with power decoupling and unity power factor. In Proceedings of the 5th India International Conference Power Electronics (IICPE), Delhi, India, 6–8 December 2012.
- Roh, Y.S.; Moon, Y.J.; Gong, J.C.; Yoo, C. Active power factor correction (PFC) circuit with resistor-free zero-current detection. IEEE Trans. Power Electron. 2011, 26, 630–637. [Google Scholar] [CrossRef]
- Soeiro, T.B.; Friedli, T.; Kolar, J.W. Design and implementation of a three-phase buck-type third harmonic current injection PFC rectifier SR. IEEE Trans. Power Electron. 2013, 28, 1608–1621. [Google Scholar] [CrossRef]
- Wichakool, W.; Avestruz, A.T.; Cox, R.W.; Leeb, S.B. Modeling and estimating current harmonics of variable electronic loads. IEEE Trans. Power Electron. 2009, 24, 2803–2811. [Google Scholar] [CrossRef]
- Yoo, K.M.; Kim, K.D.; Lee, J.Y. Single-and three-phase PHEV onboard battery charger using small link capacitor. IEEE Trans. Ind. Electron. 2013, 60, 3136–3144. [Google Scholar]
- Crosier, R.; Wang, S. DQ-frame modeling of an active power filter integrated with a grid-connected, multifunctional electric vehicle charging station. IEEE Trans. Power Electron. 2013, 28, 5702–5716. [Google Scholar] [CrossRef]
- Hamad, M.S.; Masoud, M.I.; Ahmed, K.H.; Williams, B.W. A shunt active power filter for a medium-voltage 12-pulse current source converter using open loop control compensation. IEEE Trans. Ind. Electron. 2014, 61, 5840–5850. [Google Scholar] [CrossRef]
- Sainz, L.; Balcells, J. Harmonic interaction influence due to current source shunt filters in networks supplying nonlinear loads. IEEE Trans. Power Del. 2012, 27, 1385–1393. [Google Scholar] [CrossRef]
- Yong, J.; Chen, L.; Nassif, A.B.; Xu, W. A frequency-domain harmonic model for compact fluorescent lamps. IEEE Trans. Power Del. 2010, 25, 1182–1189. [Google Scholar] [CrossRef]
- Sun, Y.; Zhang, G.; Xu, W.; Mayordomo, J.G. A harmonically coupled admittance matrix model for AC/DC converters. IEEE Trans. Power Syst. 2007, 22, 1574–1582. [Google Scholar] [CrossRef]
- Yong, J.; Chen, L.; Chen, S.Y. Modeling of home appliances for power distribution system harmonic analysis. IEEE Trans. Power Del. 2010, 25, 3147–3155. [Google Scholar] [CrossRef]
- Ziari, I.; Jalilian, A. A new approach for allocation and sizing of multiple active power-line conditioners. IEEE Trans. Power Del. 2010, 25, 1026–1035. [Google Scholar] [CrossRef]
- Terciyanli, A.; Ermis, M.; Cadirci, I. A selective harmonic amplification method for reduction of kVA rating of current source converters in shunt active power filters. IEEE Trans. Power Del. 2011, 26, 65–78. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Zhou, N.; Wang, J.; Wang, Q.; Wei, N.; Lou, X. Capacity Calculation of Shunt Active Power Filters for Electric Vehicle Charging Stations Based on Harmonic Parameter Estimation and Analytical Modeling. Energies 2014, 7, 5425-5443. https://doi.org/10.3390/en7085425
Zhou N, Wang J, Wang Q, Wei N, Lou X. Capacity Calculation of Shunt Active Power Filters for Electric Vehicle Charging Stations Based on Harmonic Parameter Estimation and Analytical Modeling. Energies. 2014; 7(8):5425-5443. https://doi.org/10.3390/en7085425
Chicago/Turabian StyleZhou, Niancheng, Jiajia Wang, Qianggang Wang, Nengqiao Wei, and Xiaoxuan Lou. 2014. "Capacity Calculation of Shunt Active Power Filters for Electric Vehicle Charging Stations Based on Harmonic Parameter Estimation and Analytical Modeling" Energies 7, no. 8: 5425-5443. https://doi.org/10.3390/en7085425