
Steady-State Characteristics Analysis of Hybrid-Excited Flux-Switching Machines with Identical Iron Laminations


Abstract
:
1. Introduction


2. Design Considerations, Hybrid-Excitation Principles, and 3D End-Effect
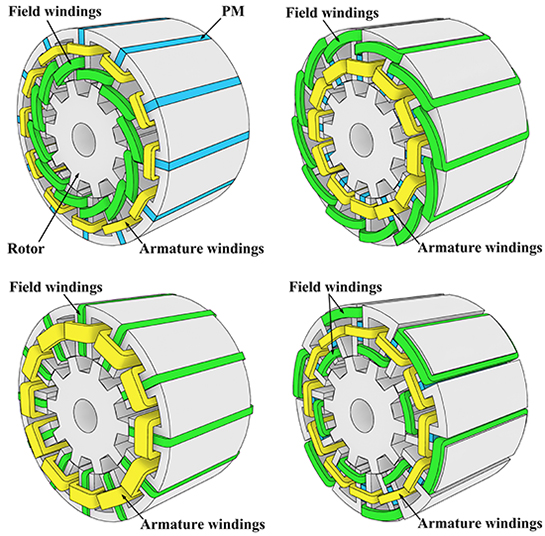
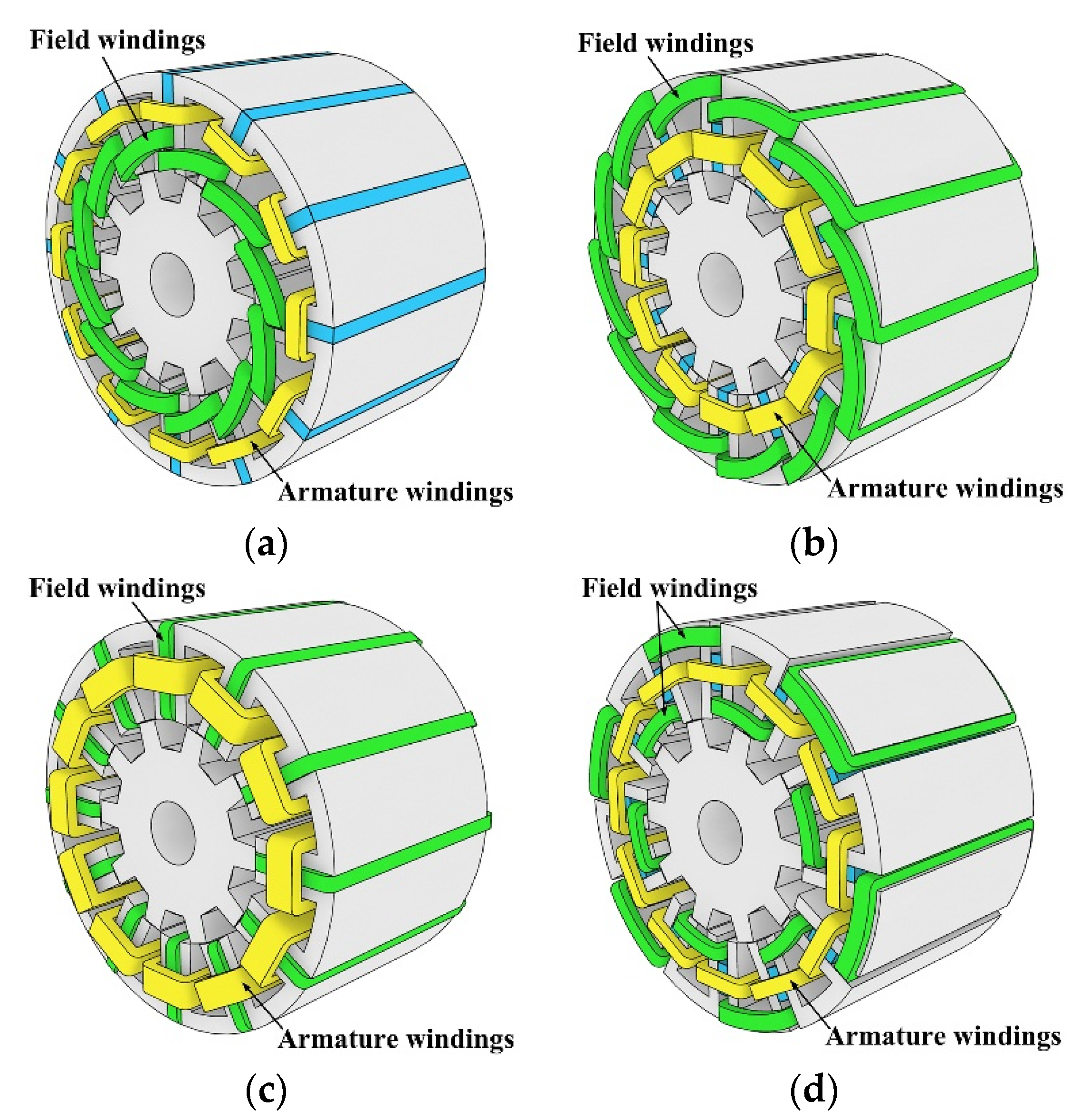
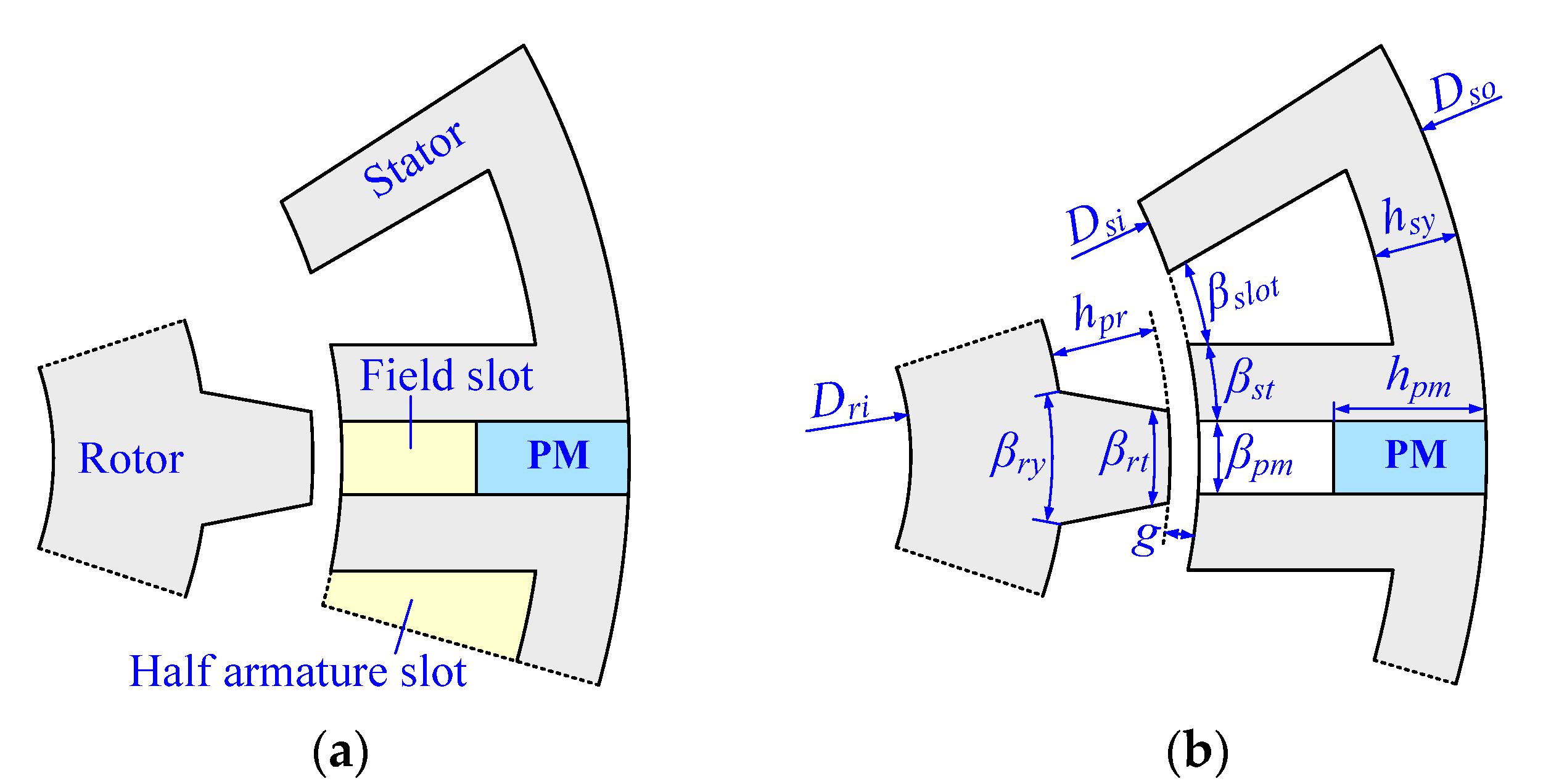
2.1. Design Considerations


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Parameters |
|---|---|---|
| Br | Magnet remanence | 0.4 T (Ferrite); 1.2 T (NdFeB) |
| Sod | Stator outer diameter | 128 mm |
| Sid | Stator inner diameter | 70.4 mm |
| la | Active stack length | 75.0 mm |
| g | Air-gap length | 0.35 mm |
| Dri | Rotor inner diameter | 22.0 mm |
| Ps | Stator slots number | 12 |
| Pr | Rotor poles number | 10 |
| hpm | Magnet length | 9.6 mm |
| βst | Stator tooth width | 7.5° |
| βpm | Magnet width | 6.75° |
| βslot | Armature slot width | 8.25° |
| βrt | Rotor pole arc | 10.5° |
| βry | Rotor yoke width | 21° |
| n | Turns per armature coil | 75 |
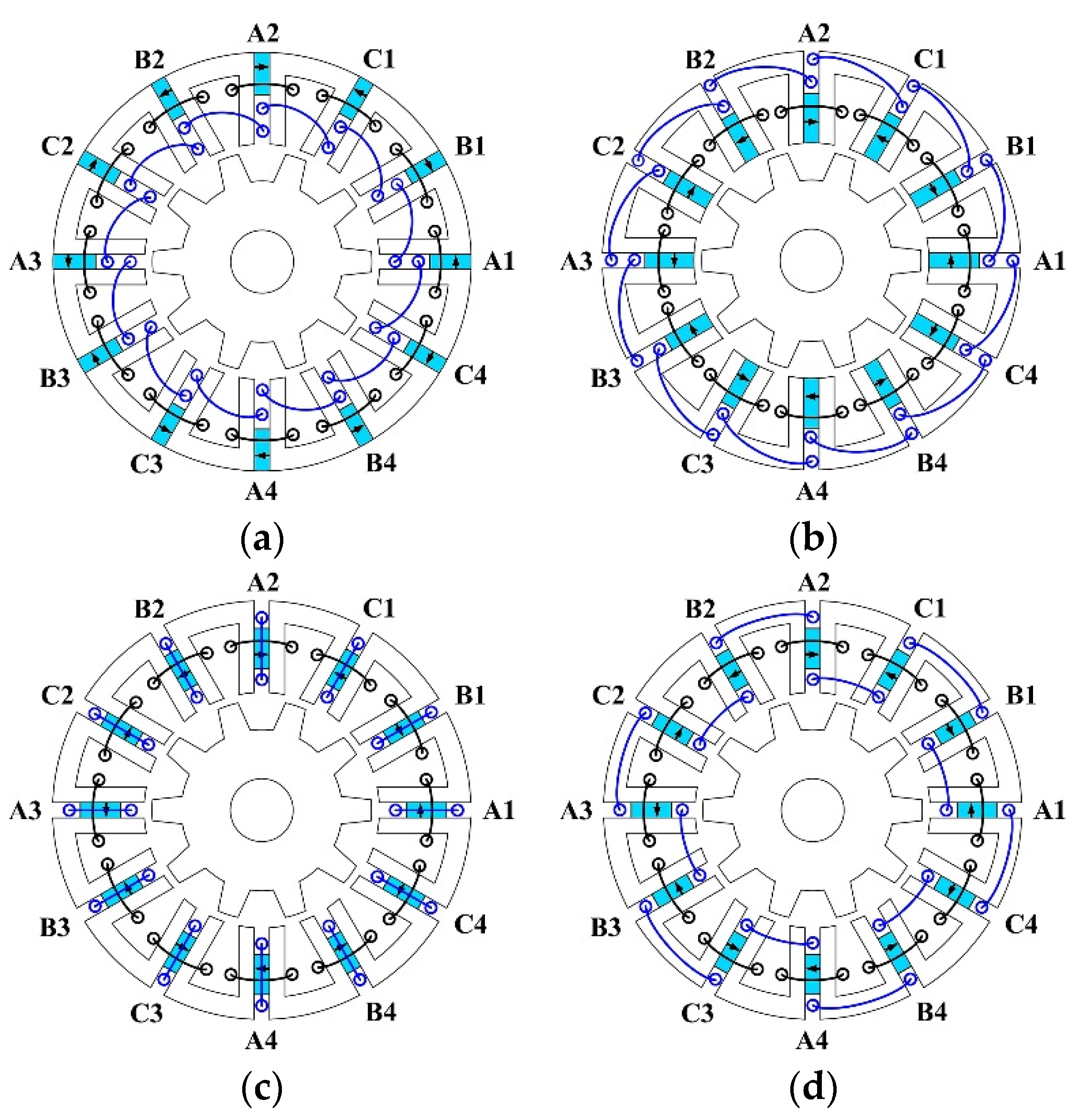
2.2. Hybrid-Excitation Principles
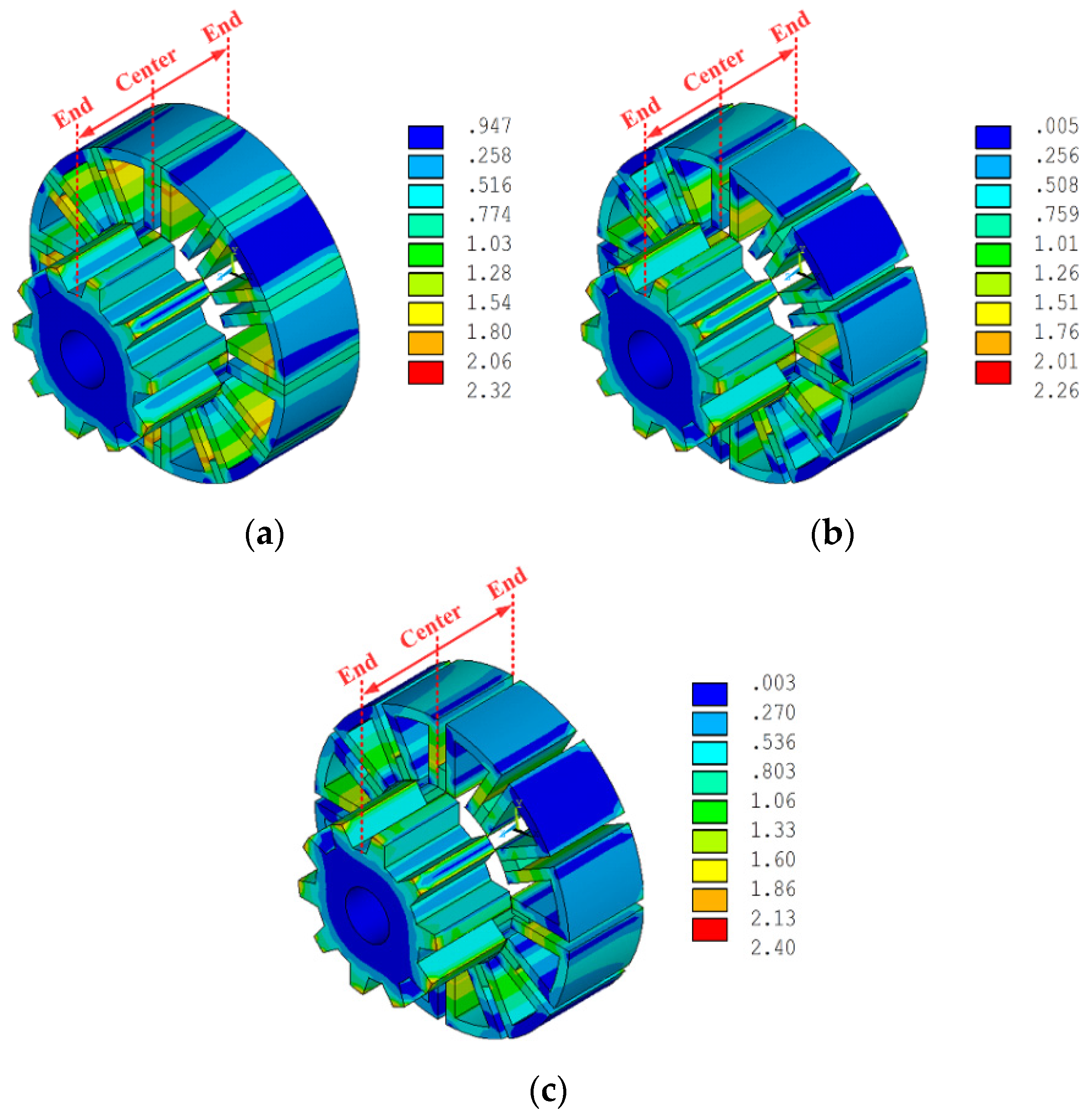
2.3. The 3D End-Effect under No-Load Condition

| Condition | PM-Top | PM-Bottom | PM-Middle-1 & -2 |
|---|---|---|---|
| Adopting Ferrite | 0.91 | 0.92 | 0.91 |
| Adopting NdFeB | 0.92 | 0.92 | 0.91 |
3. Loaded Performances







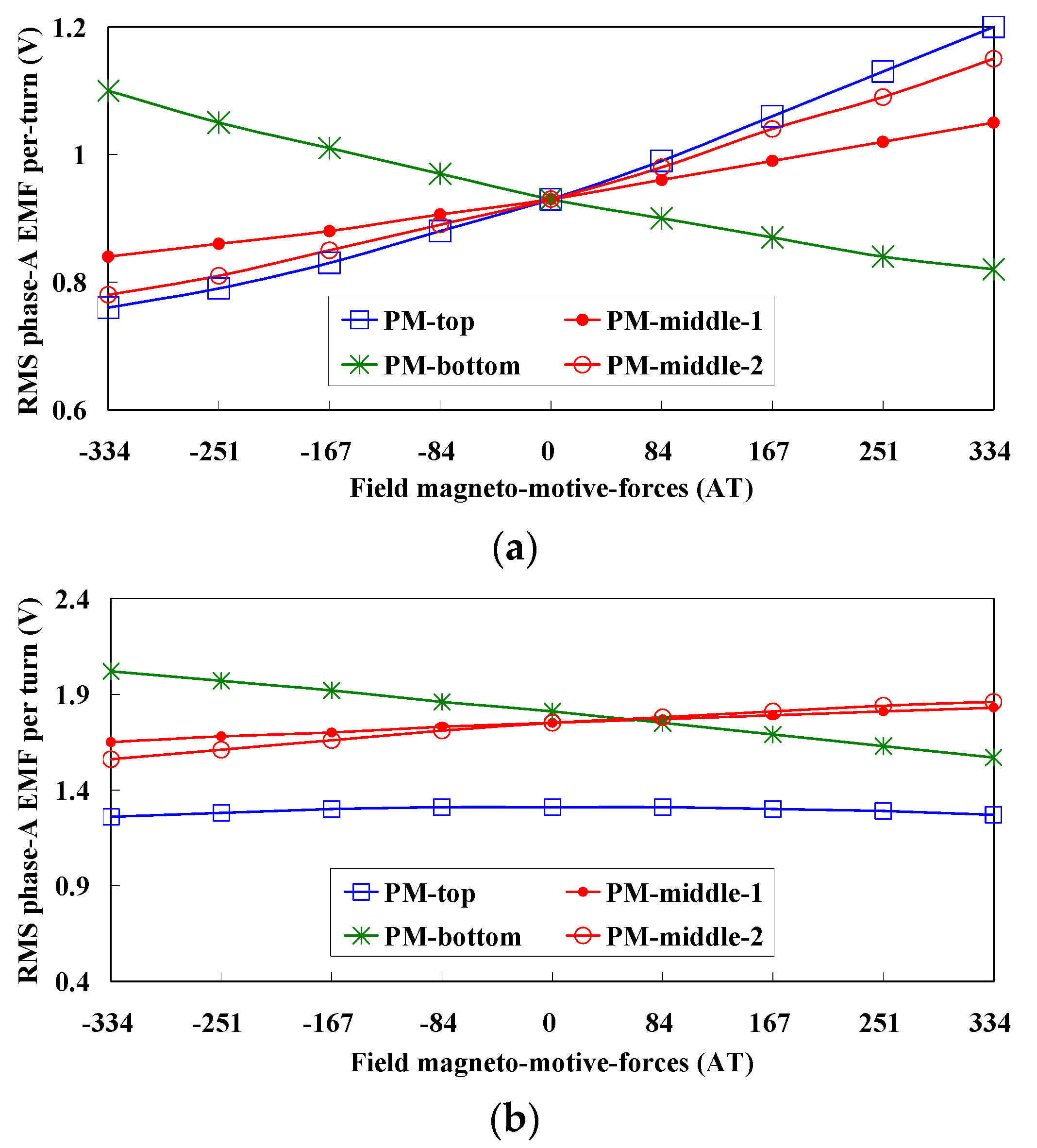
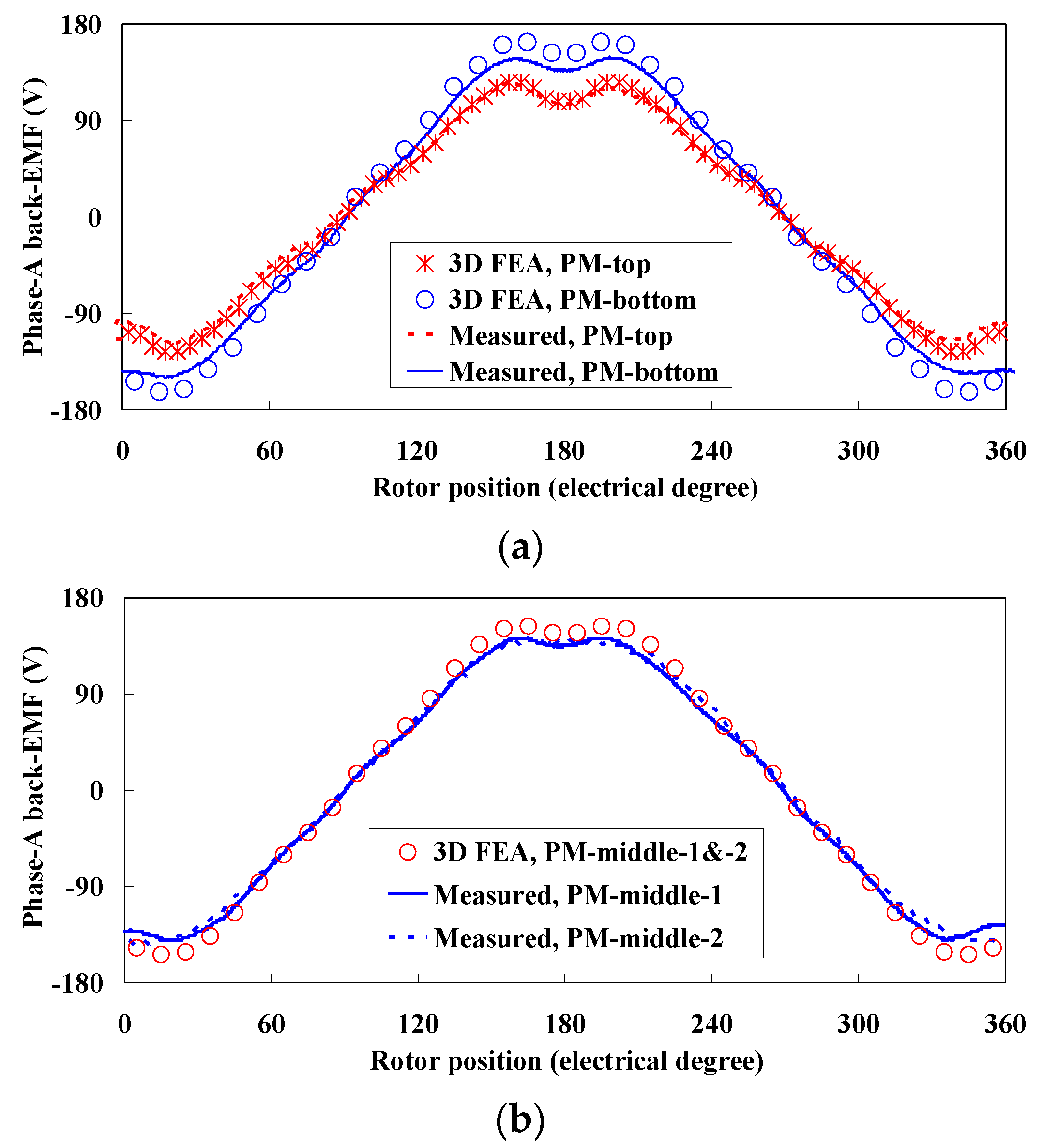
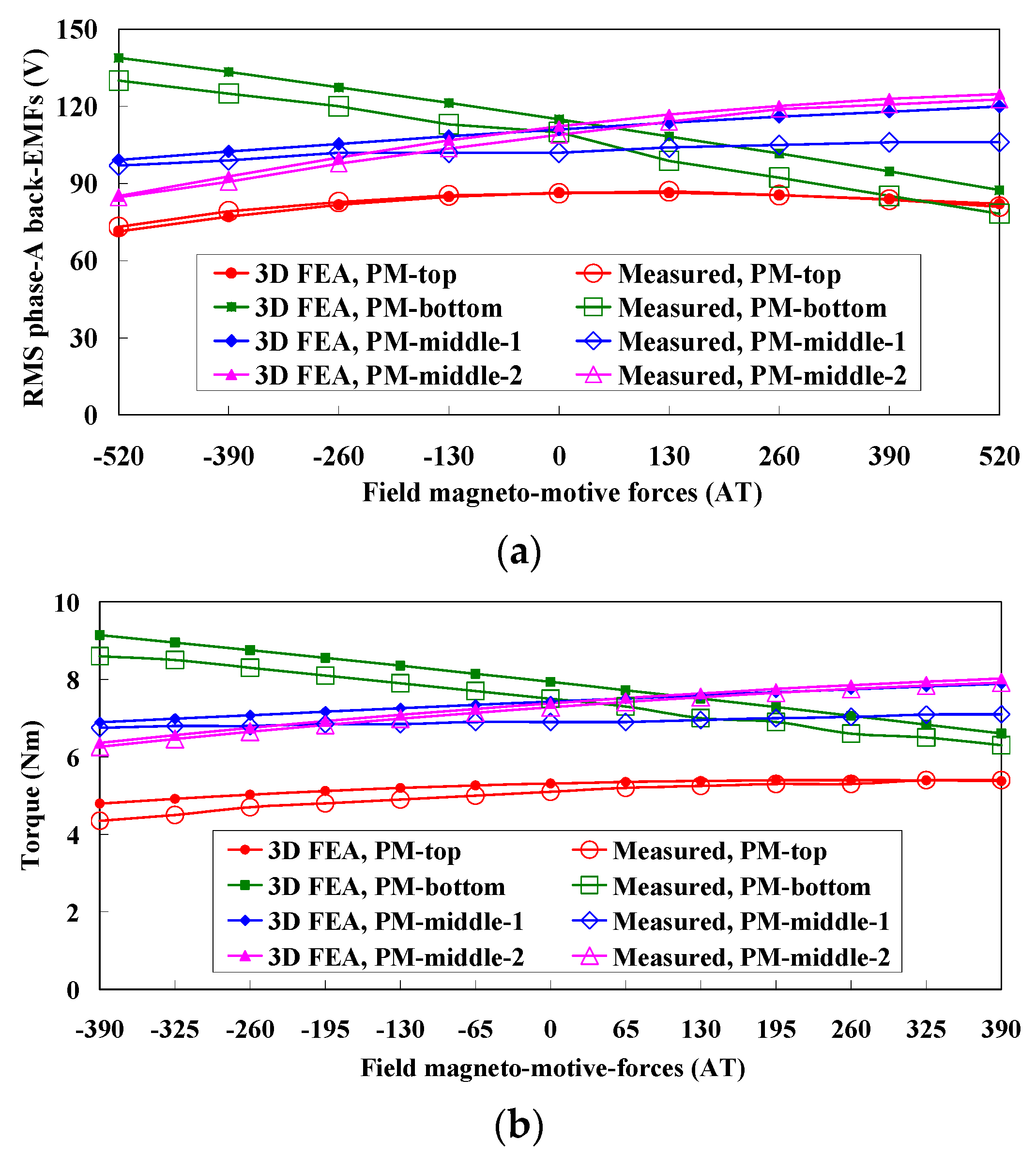
3.1. Phase-A EMF
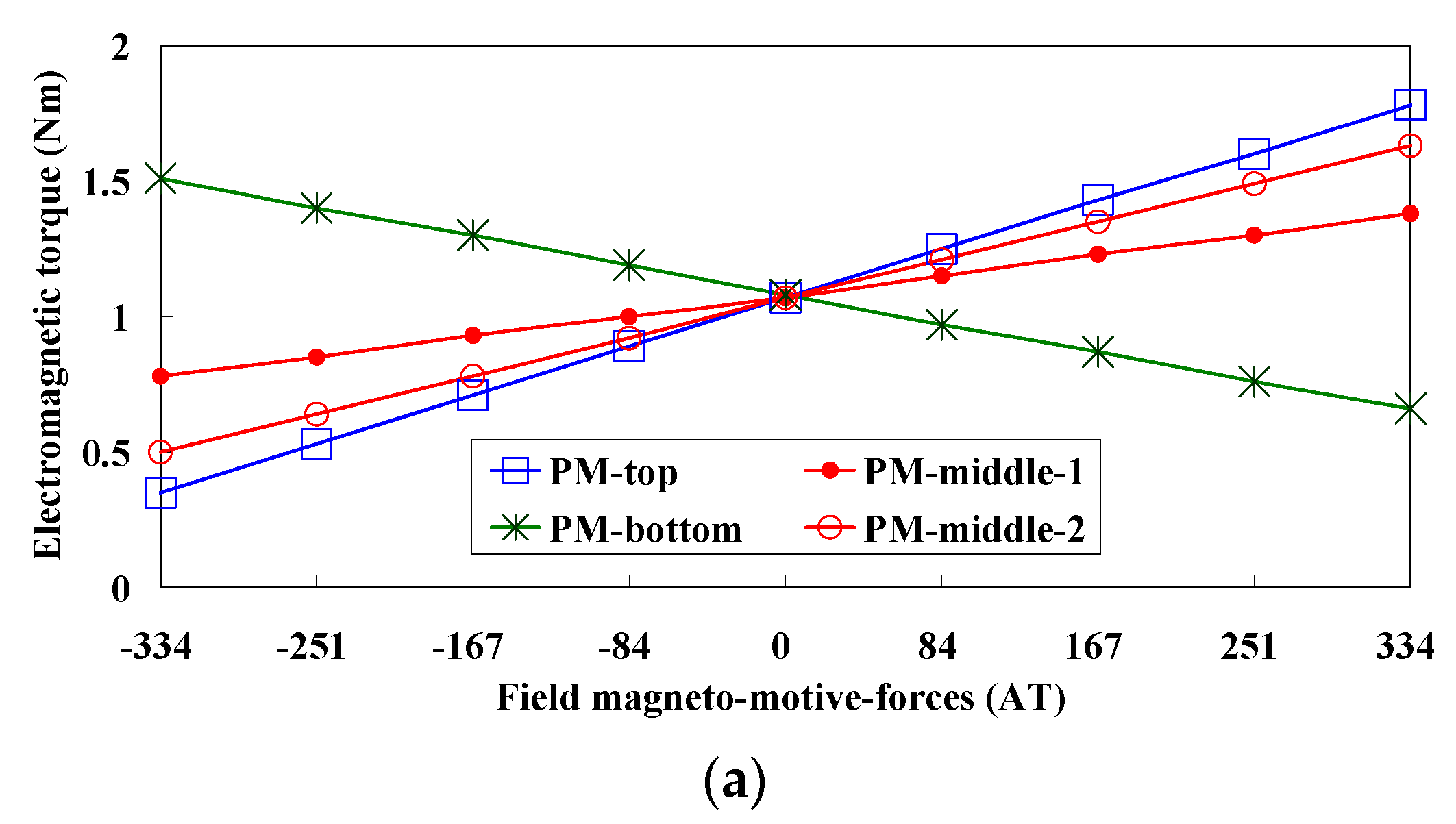
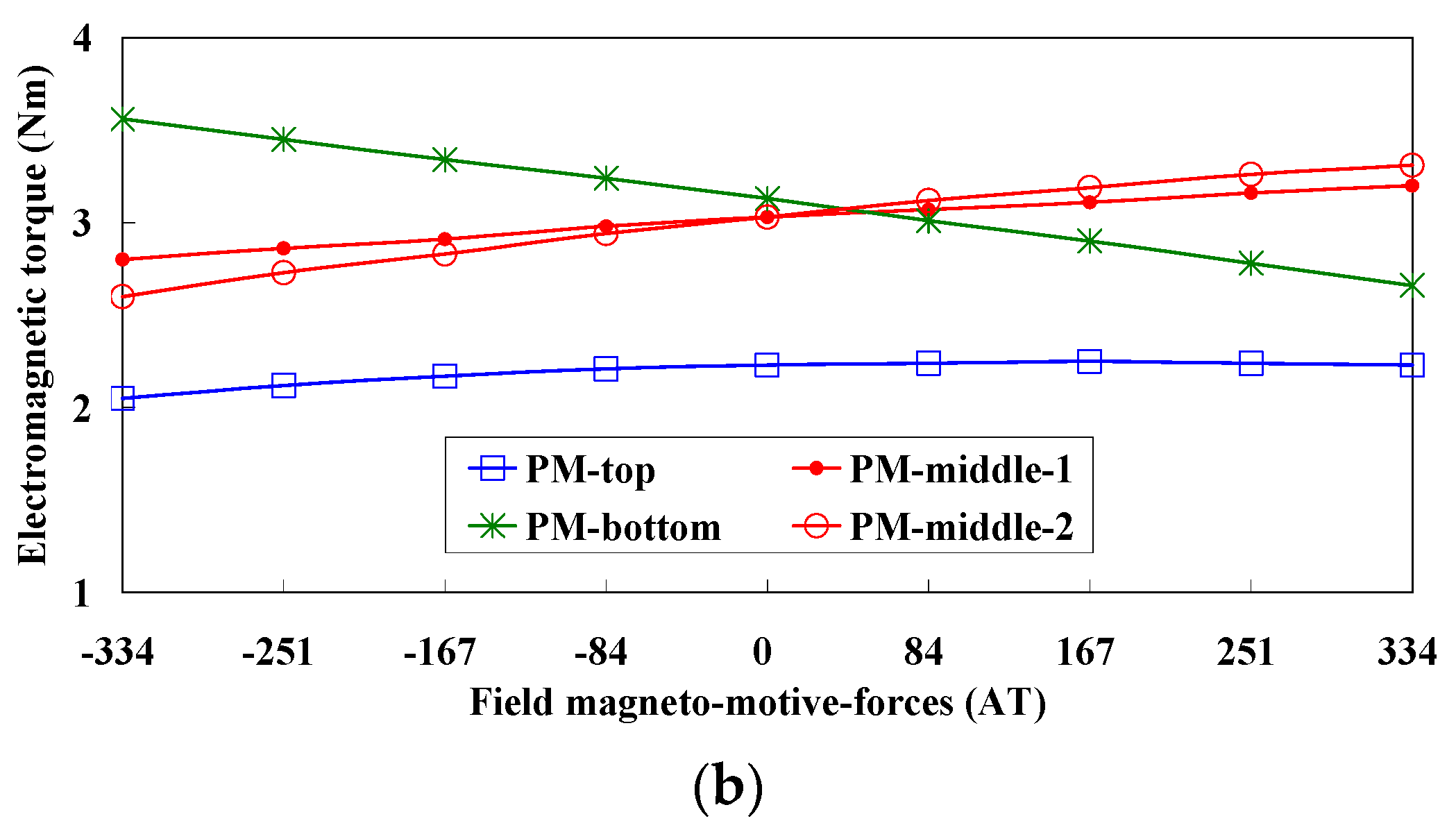
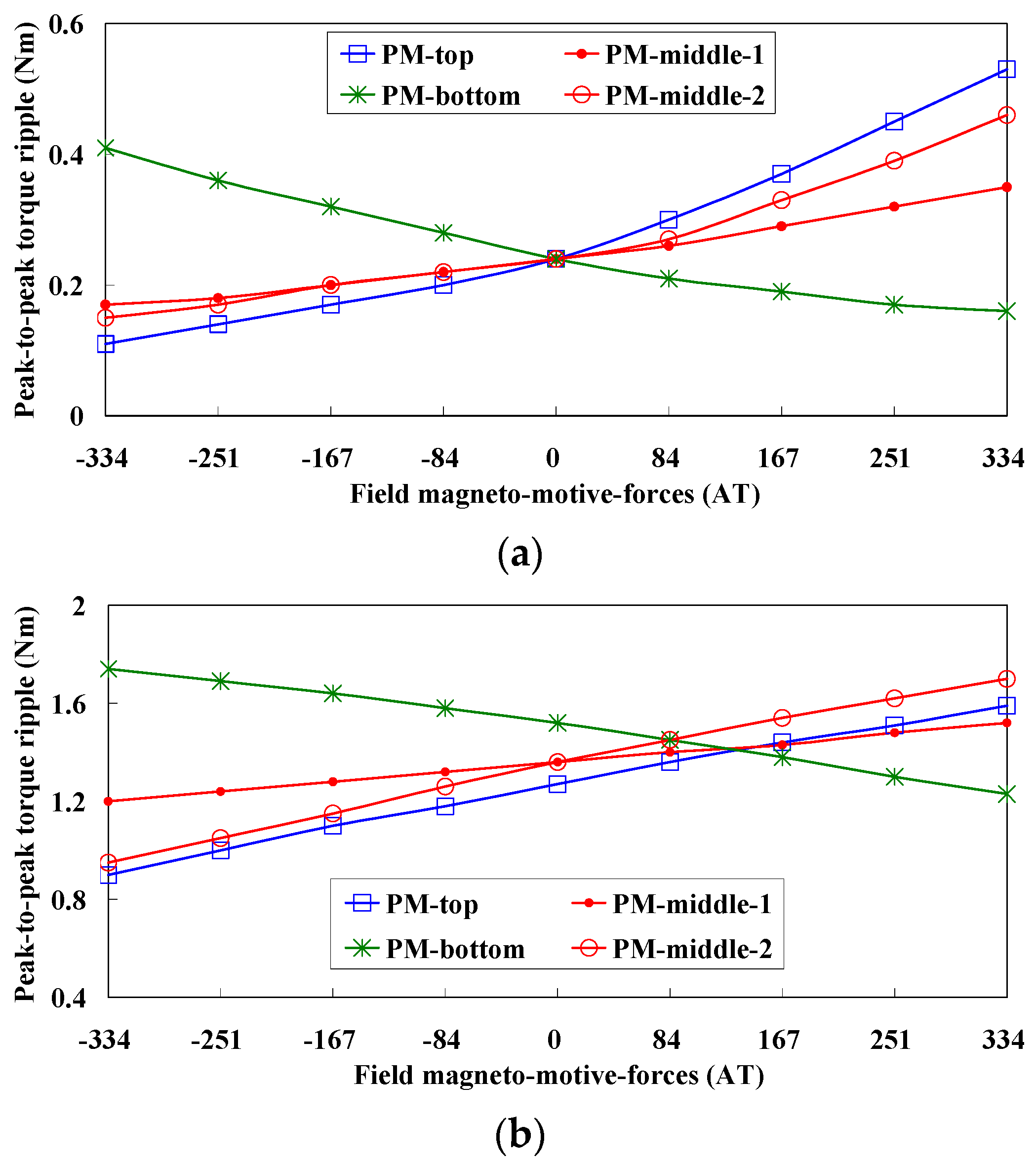
3.2. Electromagnetic Torque
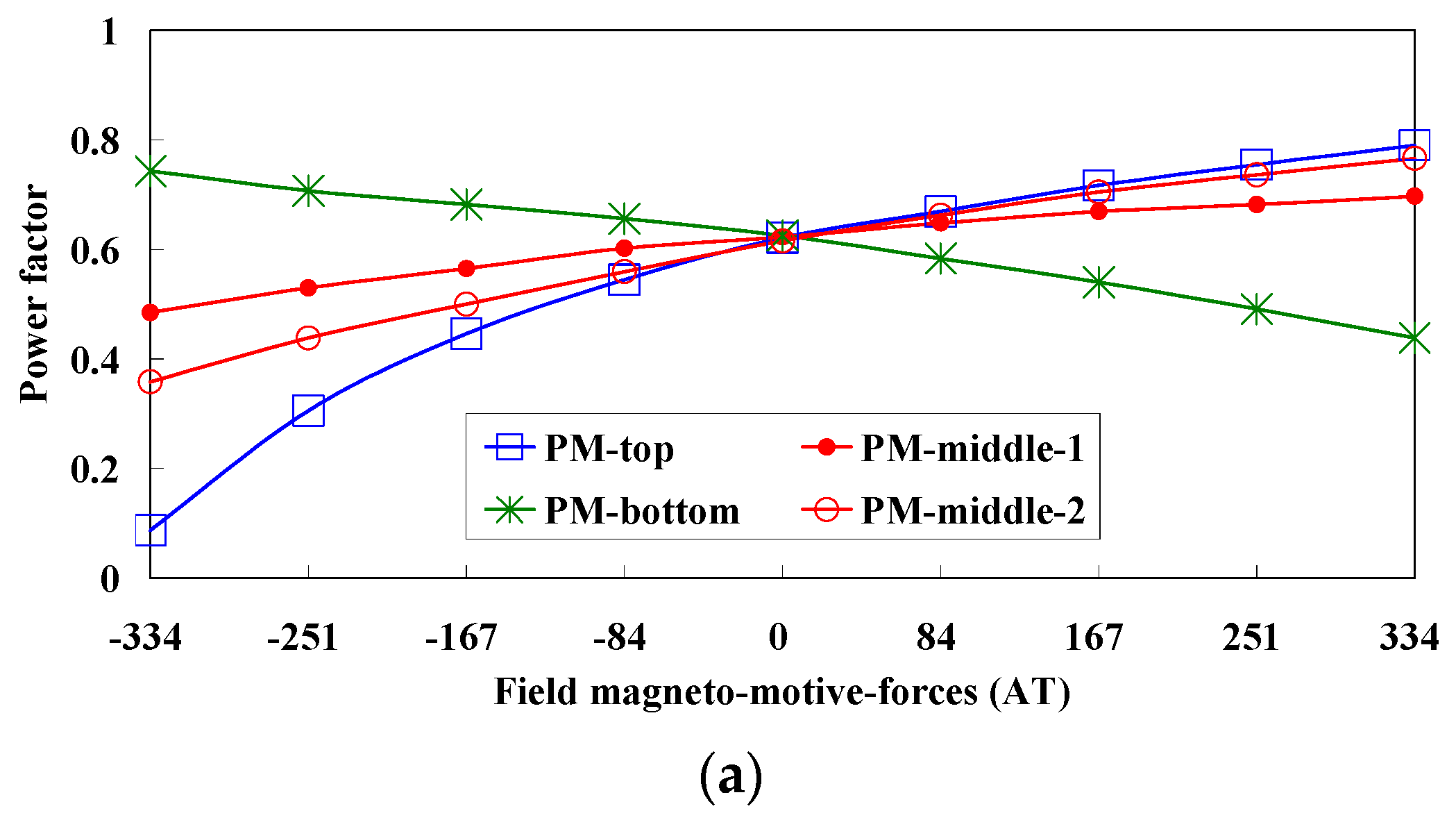
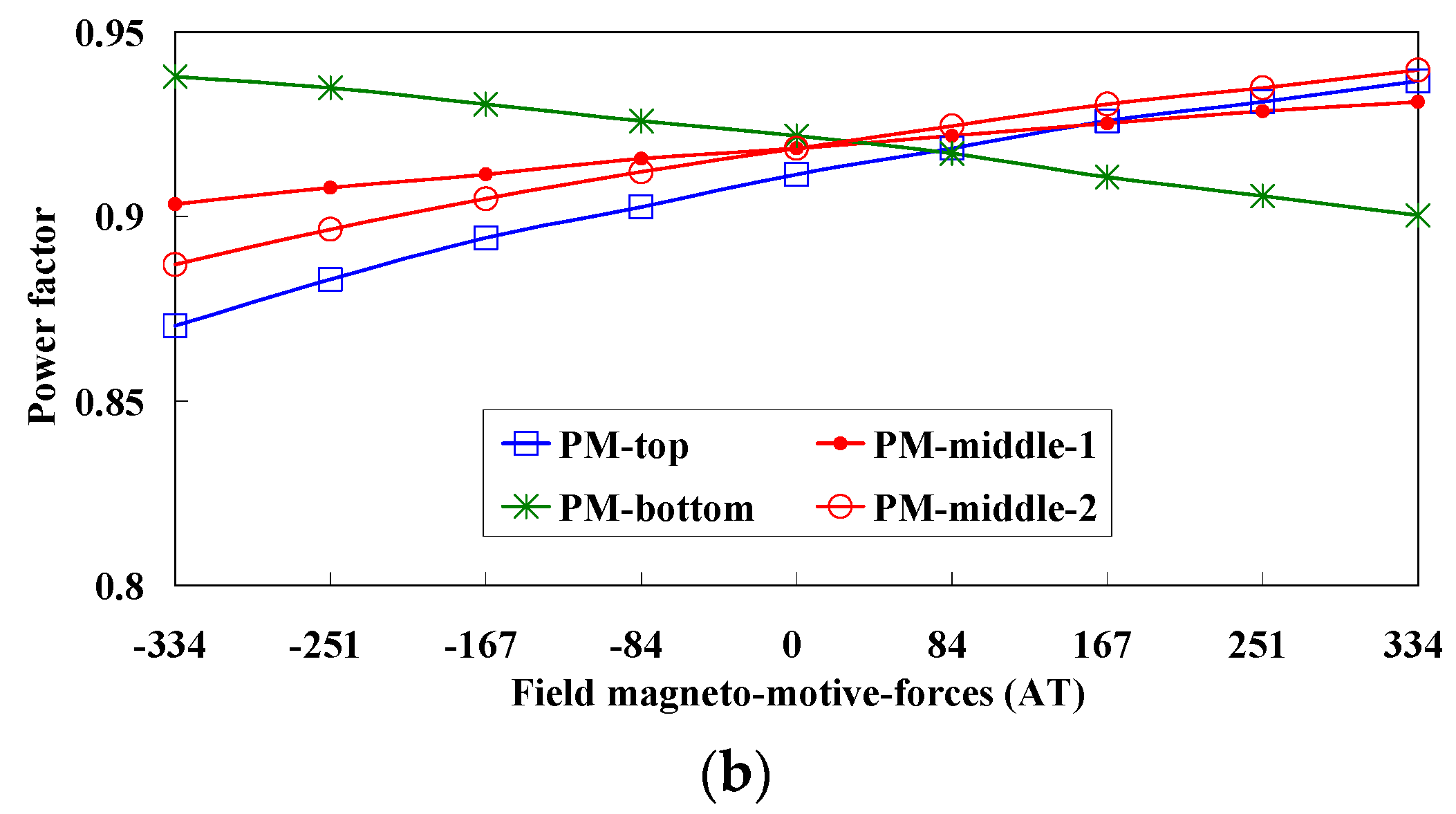
3.3. Power Factor
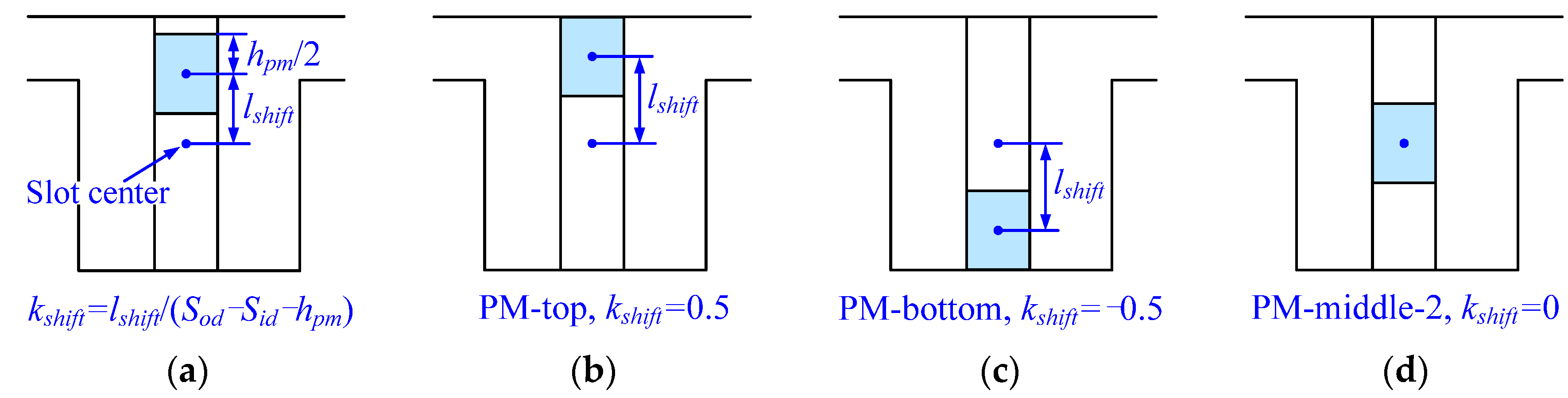
4. Influences of Different PM Positions in the PM-Middle-2 Machine




5. Thermal Dissipation
5.1. Copper Loss and Iron Loss

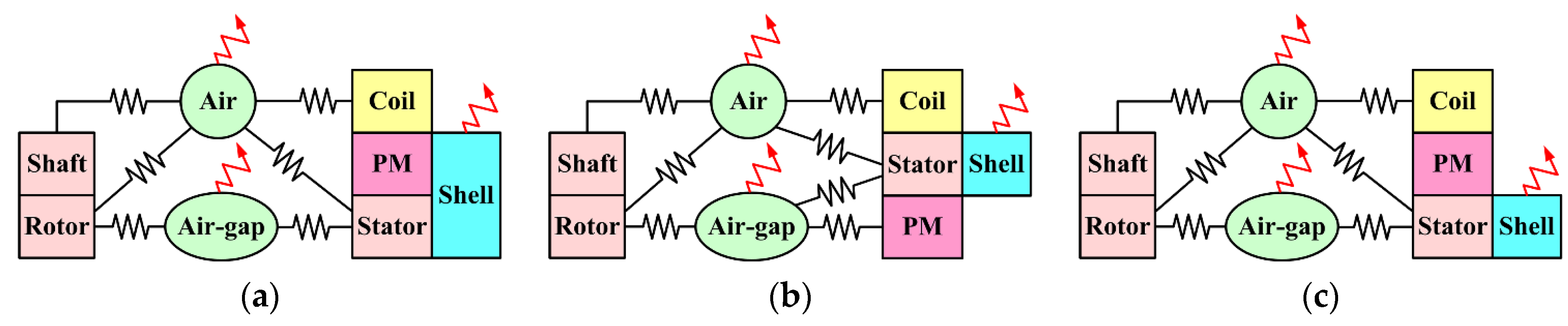
5.2. Heat Equivalent Circuit

| Machine Parts | Thermal Conductivities | Mechanical Properties |
|---|---|---|
| Stator core | 23 W/m·°C | 7650 kg/m3 |
| Rotor core | 23 W/m·°C | 7650 kg/m3 |
| Shaft | 80 W/m·°C | 7800 kg/m3 |
| Stator shell | 237 W/m·°C | 2688 kg/m3 |
| Coil | 340 W/m·°C | 4000 kg/m3 |
| Water | 0.62 W/m·°C | 1000 kg/m3 |
| Ambient air | 0.30 W/m·°C | 1.22 kg/m3 |
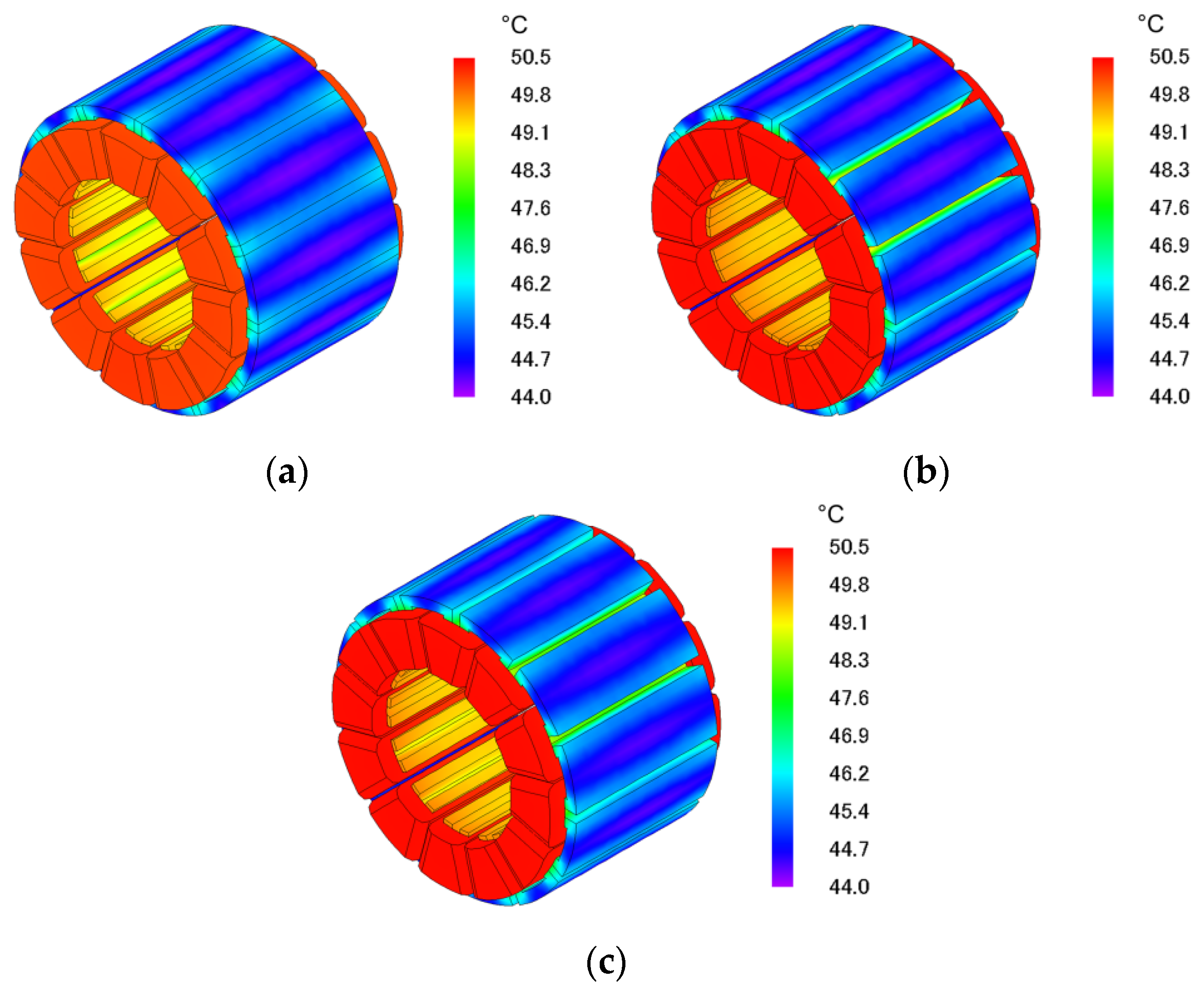
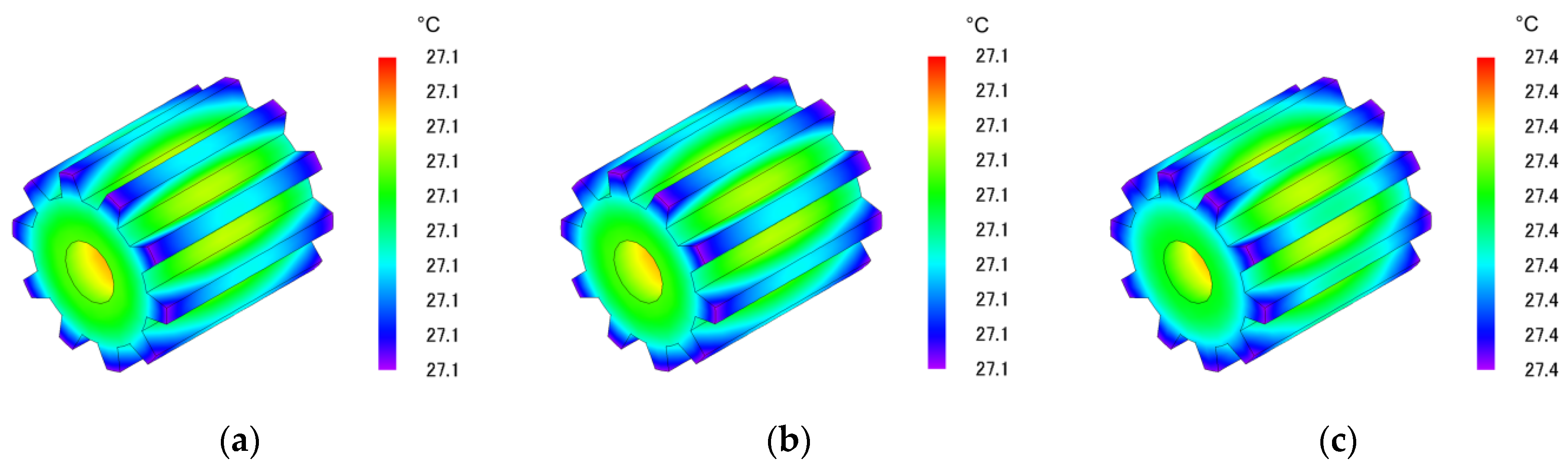
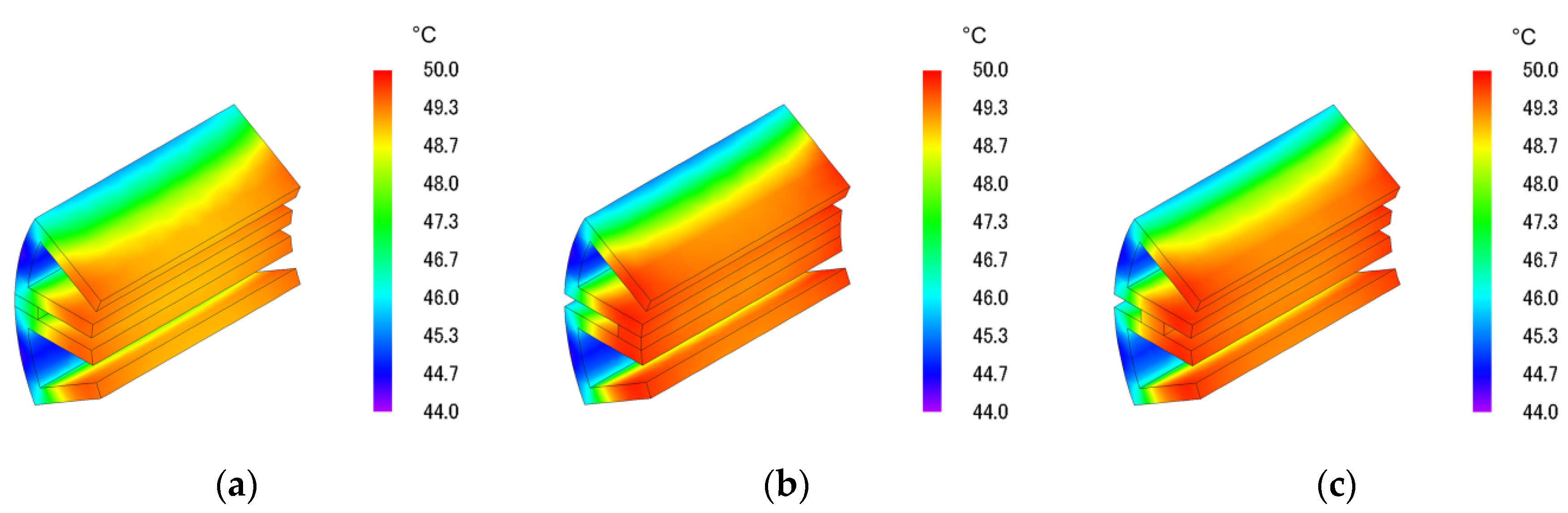
5.3. Steady-State Temperature Distributions with NdFeB


5.4. Influence of Temperature on Magnets


| Excitation | Values | PM-Top | PM-Bottom | PM-Middle-1 & 2 |
|---|---|---|---|---|
| Only PM | Minimum | 45.4 °C | 49.2 °C | 47.9 °C |
| Maximum | 47.8 °C | 49.8 °C | 49.6 °C | |
| PM&PFC | Minimum | 59.1 °C | 65.2 °C | 67.3 °C |
| Maximum | 62.6 °C | 66.3 °C | 69.1 °C | |
| PM&NFC | Minimum | 58.1 °C | 63.2 °C | 66.5 °C |
| Maximum | 61.3 °C | 66.1 °C | 68.4 °C |
| Excitation | Values | PM-Top | PM-Bottom | PM-Middle-1 & 2 |
|---|---|---|---|---|
| Only PM | Minimum | 40.4 °C | 44.2 °C | 42.3 °C |
| Maximum | 42.4 °C | 45.8 °C | 44.1 °C | |
| PM&PFC | Minimum | 53.1 °C | 60.1 °C | 62.0 °C |
| Maximum | 57.1 °C | 62.3 °C | 64.2 °C | |
| PM&NFC | Minimum | 53.2 °C | 58.1 °C | 61.6 °C |
| Maximum | 55.8 °C | 60.9 °C | 63.3 °C |
| Heat Source | PM-Top | PM-Bottom | PM-Middle-1 & 2 |
|---|---|---|---|
| Iron losses in stator | 5.2 W | 5.2 W | 5.2 W |
| Iron losses in rotor | 1.4 W | 1.4 W | 1.4 W |
| Copper loss in armature | 64 W | 64 W | 64 W |
| Copper loss in field winding | 42.2 W | 42.2 W | 42.2 W |
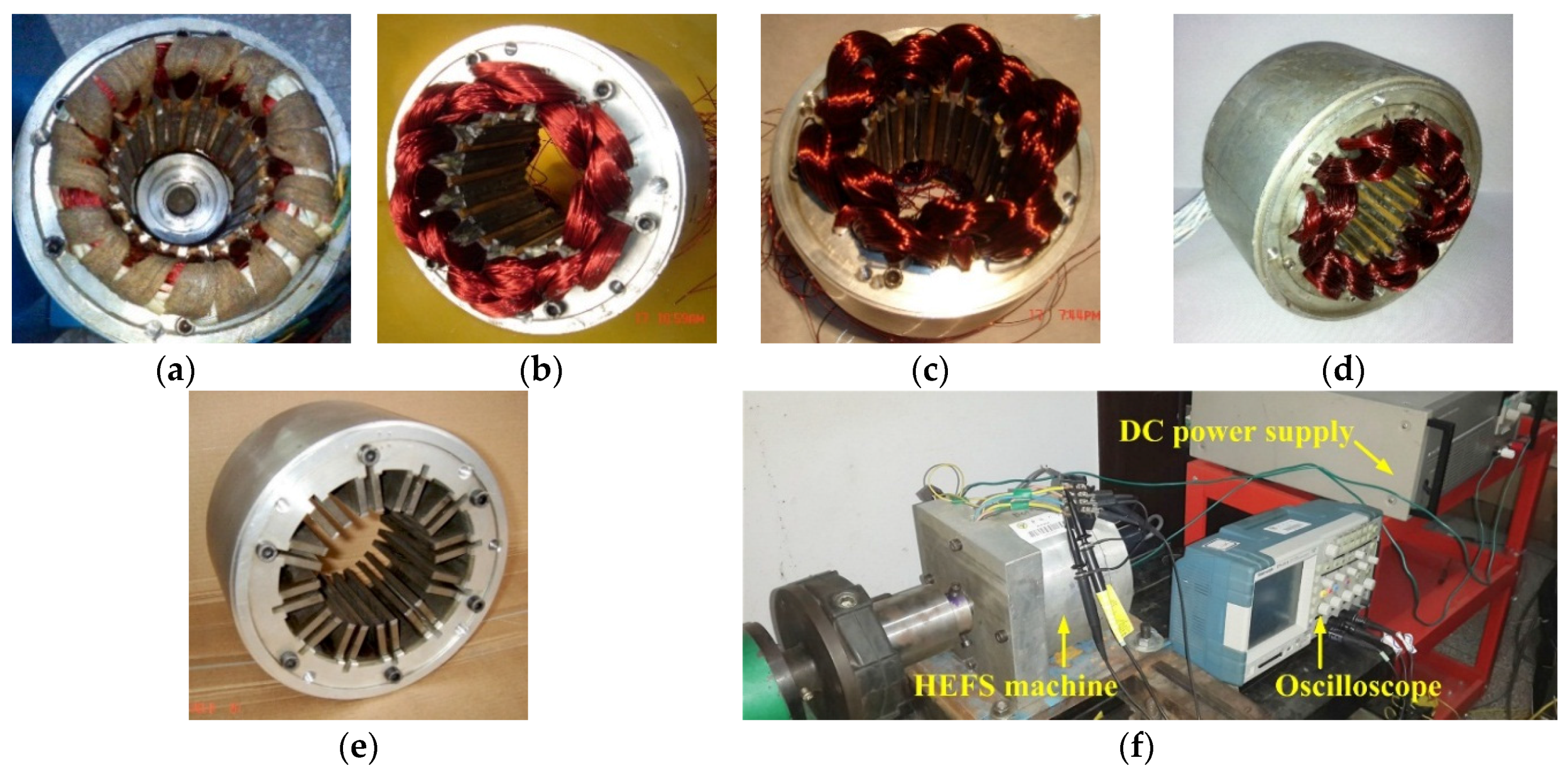
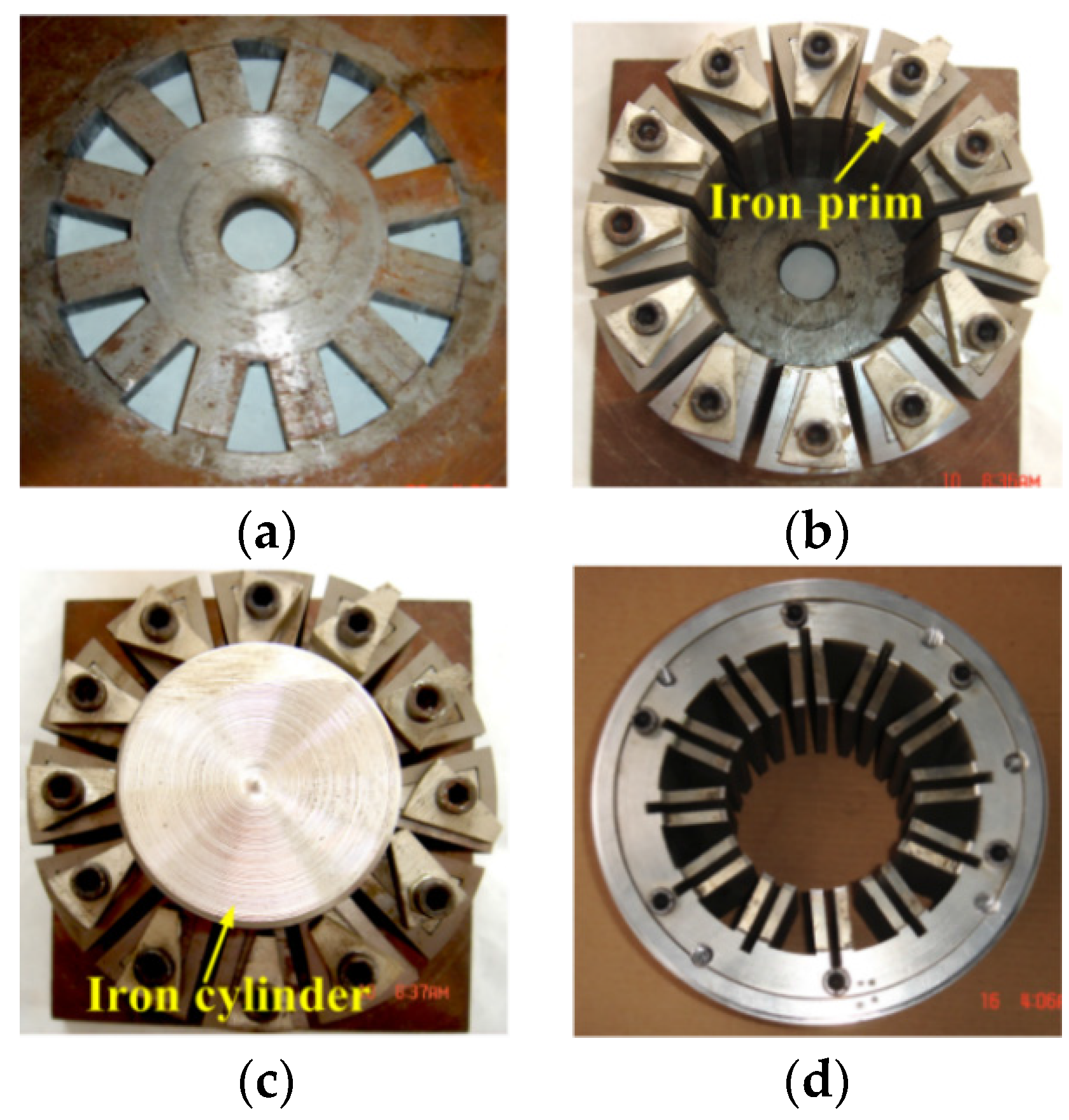
6. Experimental Validations




| Item | PM-Top | PM-Bottom | PM-Middle-1 | PM-Middle-2 |
|---|---|---|---|---|
| Ld, FEA | 19.4 mH | 25.3 mH | 24.8 mH | 24.8 mH |
| Ld, measured | 18.6 mH | 24.2 mH | 23.8 mH | 23.3 mH |
| Error (%) | 4.1% | 4.3% | 4.0% | 6.0% |
| Lq, FEA | 16.7 mH | 28.0 mH | 25.1 mH | 25.1 mH |
| Lq, measured | 16.1 mH | 27.0 mH | 23.9 mH | 24.2 mH |
| Error (%) | 3.6% | 3.6% | 4.8% | 3.6% |
7. Conclusions
- (1)
- When ferrite is employed, the PM-top HEFS machine shows best PM utilization, flux-regulation capability, along with best thermal condition of PMs, thus the overall greatest potential in low-cost applications.
- (2)
- When NdFeB is employed, the PM-bottom HEFS machine exhibits best PM utilization, flux-regulation and torque output capabilities, as well as best THD contents in phase EMFS waveform, only with the drawback of slightly unsatisfied thermal condition of PMs. Overall, the PM-bottom one shows best potential in applications when NdFeB is used.
| Performance | Adopting Ferrite | Adopting NdFeB | ||||
|---|---|---|---|---|---|---|
| -Top | -Bottom | -Middle-2 | -Top | -Bottom | -Middle-2 | |
| PM utilization | O | O | O | × | √ | O |
| Flux regulation capability | √ | O | × | × | √ | O |
| PM torque output | O | O | O | × | √ | O |
| Torque ripple | O | O | O | √ | × | O |
| THD of no-load phase EMF | × | √ | O | × | √ | O |
| 3D end-effect | O | O | O | O | O | O |
| Thermal condition of PMs | / | / | / | √ | × | × |
| Performance | Adopting Ferrite | Adopting NdFeB | ||||
|---|---|---|---|---|---|---|
| -Top | -Bottom | -Middle-2 | -Top | -Bottom | -Middle-2 | |
| PM utilization | 1.0 | 1.0 | 1.0 | 0.56 | 1.12 | 1.0 |
| Flux regulation capability | 1.1 | 1.0 | 0.6 | 0.12 | 1.35 | 1.0 |
| PM torque output | 1.0 | 1.0 | 1.0 | 0.56 | 1.12 | 1.0 |
| Torque ripple | 1.0 | 1.0 | 1.0 | 0.94 | 1.18 | 1.0 |
| THD of no-load phase EMF | 1.05 | 0.95 | 1.0 | 1.52 | 0.86 | 1.0 |
| 3D end-effect | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 |
| Thermal condition of PMs | – | – | – | 1.11 | 1.0 | 1.0 |
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Rauch, S.E.; Johnson, L.J. Design principles of flux-switching alternators. AIEE Trans. Power Appar. Syst. 1955, 74, 1261–1268. [Google Scholar]
- Hoang, E.; Ben-Ahmed, A.H.; Lucidarme, J. Switching flux permanent magnet polyphased synchronous machines. In Proceedings of the 7th Europe Conference on Power Electronics and Applications, Trondheim, Norway, 8–10 September 1997; pp. 903–908.
- Zulu, A.; Mecrow, B.C.; Armstrong, M. Permanent-magnet flux-switching synchronous motor employing a segmental rotor. IEEE Trans. Ind. Appl. 2012, 48, 2259–2267. [Google Scholar] [CrossRef]
- Deodhar, R.P.; Pride, A.; Iwasaki, S.; Bremner, J.J. Performance improvement in flux-switching PM machines using flux diverters. IEEE Trans. Ind. Appl. 2014, 50, 973–978. [Google Scholar] [CrossRef]
- Hua, W.; Cheng, M.; Zhu, Z.Q.; Howe, D. Analysis and optimization of back-EMF waveform of a flux-switching permanent magnet motor. IEEE Trans. Energy Convers. 2008, 23, 727–733. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Chen, J.T. Advanced flux-switching permanent magnet brushless machines. IEEE Trans. Magn. 2010, 46, 1447–1453. [Google Scholar] [CrossRef]
- Chau, K.T.; Chan, C.C.; Liu, C. Overview of permanent-magnet brushless drives for electric and hybrid electric vehicles. IEEE Trans. Ind. Electron. 2008, 5, 2246–2257. [Google Scholar] [CrossRef] [Green Version]
- Zhao, W.X.; Cheng, M.; Chau, K.T.; Cao, R.W.; Ji, J.H. Remedial injected-harmonic-current operation of redundant flux-switching permanent-magnet motor drives. IEEE Trans. Ind. Electron. 2013, 60, 151–159. [Google Scholar] [CrossRef] [Green Version]
- Yan, J.H.; Lin, H.Y.; Zhu, Z.Q.; Jin, P.; Guo, Y.J. Cogging torque optimization of flux-switching transverse flux permanent magnet machine. IEEE Trans. Magn. 2013, 49, 2169–2172. [Google Scholar] [CrossRef]
- Wang, D.H.; Wang, X.H.; Jung, S.Y. Reduction on cogging torque in flux-switching permanent magnet machine by teeth notching schemes. IEEE Trans. Appl. 2012, 48, 4228–4231. [Google Scholar] [CrossRef]
- Zhao, J.; Yan, Y.S.; Li, B.; Liu, X.D.; Chen, Z. Influence of different rotor teeth shapes on the performance of flux switching permanent magnet machines used for electric vehicles. Energies 2014, 7, 8056–8075. [Google Scholar] [CrossRef]
- Gaussens, B.; Hoang, E.; Lécrivain, M.; Manfe, P.; Gabsi, M. A hybrid-excited flux-switching machine for high-speed DC-alternator applications. IEEE Trans. Ind. Electron. 2014, 61, 2076–2989. [Google Scholar] [CrossRef]
- Wang, Y.; Deng, Z.Q. Hybrid excitation topologies and control strategies of stator permanent magnet machines for DC power system. IEEE Trans. Ind. Electron. 2012, 59, 4601–4616. [Google Scholar] [CrossRef]
- Cheng, M.; Hua, W.; Zhang, J.Z.; Zhao, W.X. Overview of stator-permanent magnet brushless machines. IEEE Trans. Ind. Electron. 2011, 58, 5087–5101. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Howe, D. Electrical machines and drives for electric, hybrid, and fuel cell vehicles. IEEE Proc. 2007, 95, 746–765. [Google Scholar] [CrossRef]
- Hoang, E.; Lecrivain, M.; Gabsi, M. A new structure of a switching flux synchronous polyphased machine with hybrid excitations. In Proceedings of the 12th European Conference on Power Electronics Applications, Aalborg, Denmark, 2–5 September 2007; pp. 1–8.
- Hua, W.; Cheng, M.; Zhang, G. A novel hybrid excitation flux-switching motor for hybrid vehicles. IEEE Trans. Magn. 2009, 45, 4728–4731. [Google Scholar] [CrossRef]
- Owen, R.L.; Zhu, Z.Q.; Jewell, G.W. Hybrid excited flux-switching permanent magnet machines. In Proceedings of the 13th European Conference on Power Electronics Applications, Barcelona, Spain, 8–10 September 2009; pp. 1–10.
- Hua, W.; Zhang, G.; Cheng, M. Flux-regulation theories and principles of hybrid-excited flux-switching machines. IEEE Trans. Ind. Electron. 2015, 62, 5359–5369. [Google Scholar] [CrossRef]
- Zhang, G.; Hua, W.; Cheng, M.; Liao, J.; Wang, K.; Zhang, J. Investigation of an improved hybrid-excitation flux switching brushless machine for HEV/EV applications. IEEE Trans. Ind. Appl. 2015, 51, 3791–3799. [Google Scholar] [CrossRef]
- Zhang, G.; Hua, W.; Cheng, M.; Liao, J.; Zhang, J.; Jiang, W. Investigation of on-loaded performances of hybrid-excitation flux-switching brushless machines for HEV/EV applications. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 328–335.
- Zhang, G.; Cheng, M.; Hua, W.; Dong, J.N. Analysis of the over-saturated effect in hybrid excited flux-switching machines. IEEE Trans. Magn. 2011, 47, 2827–2830. [Google Scholar] [CrossRef]
- Li, G.; Ojeda, J.; Hoang, E.; Gabsi, M.; Lécrivain, M. Thermal-electromagnetic analysis for driving cycles of embedded flux-switching permanent-magnet motors. IEEE Trans. Veh. Technol. 2012, 61, 140–151. [Google Scholar] [CrossRef]
- Amara, Y.; Vido, L.; Gabsi, M.; Hoang, E.; Ahmed, A.H.B.; Li, G. Hybrid excitation synchronous machines: Energy-efficient solution for vehicles propulsion. IEEE Trans. Veh. Technol. 2009, 58, 2137–2149. [Google Scholar] [CrossRef]
- Pang, Y.; Zhu, Z.Q.; Howe, D.; Iwasaki, S.; Deodhar, R.; Pride, A. Investigation of iron loss in flux-switching PM machines. In Proceedings of the 4th IET Conference on Power Electronics, Machines and Drives (PEMD), York, UK, 2–14 April 2008; pp. 460–464.
- Nerg, J.; Rilla, M.; Pyrhonen, J. Thermal analysis of radial-flux electrical machines with a high power density. IEEE Trans. Ind. Electron. 2008, 55, 3543–3554. [Google Scholar] [CrossRef]
- JSOL Corporation. JMAG User’s Manual Solver; Version 10; JSOL Corporation: Tokyo, Japan, 2010. [Google Scholar]
- JSOL Corporation. JMAG Designer Online Help; Version 10.5; JSOL Corporation: Tokyo, Japan, 2011. [Google Scholar]
- Huang, Z.; Nategh, S.; Alakula, M.; Lassila, V.; Yuan, J.L. Direct oil cooling of traction motors in hybrid drives. In Proceedings of the 2012 IEEE International Electric Vehicle Conference (IEVC), Greenville, SC, USA, 4–8 March 2012; pp. 1–8.
- Sebastian, T. Temperature effects on torque production and efficiency of PM motors using NdFeB magnets. IEEE Trans. Ind. Appl. 1995, 31, 353–357. [Google Scholar] [CrossRef]
- Zhou, P.; Lin, D.; Xiao, Y.; Lambert, N.; Rahman, M.A. Temperature-dependent demagnetization model of permanent magnets for finite element analysis. IEEE Trans. Magn. 2012, 48, 1031–1034. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, G.; Hua, W.; Cheng, M. Steady-State Characteristics Analysis of Hybrid-Excited Flux-Switching Machines with Identical Iron Laminations. Energies 2015, 8, 12898-12916. https://doi.org/10.3390/en81112351
Zhang G, Hua W, Cheng M. Steady-State Characteristics Analysis of Hybrid-Excited Flux-Switching Machines with Identical Iron Laminations. Energies. 2015; 8(11):12898-12916. https://doi.org/10.3390/en81112351
Chicago/Turabian StyleZhang, Gan, Wei Hua, and Ming Cheng. 2015. "Steady-State Characteristics Analysis of Hybrid-Excited Flux-Switching Machines with Identical Iron Laminations" Energies 8, no. 11: 12898-12916. https://doi.org/10.3390/en81112351