
Optimal Coordinated Control of Power Extraction in LES of a Wind Farm with Entrance Effects


Abstract
:1. Introduction
2. Numerical Method
2.1. Governing Flow Equations and Discretization


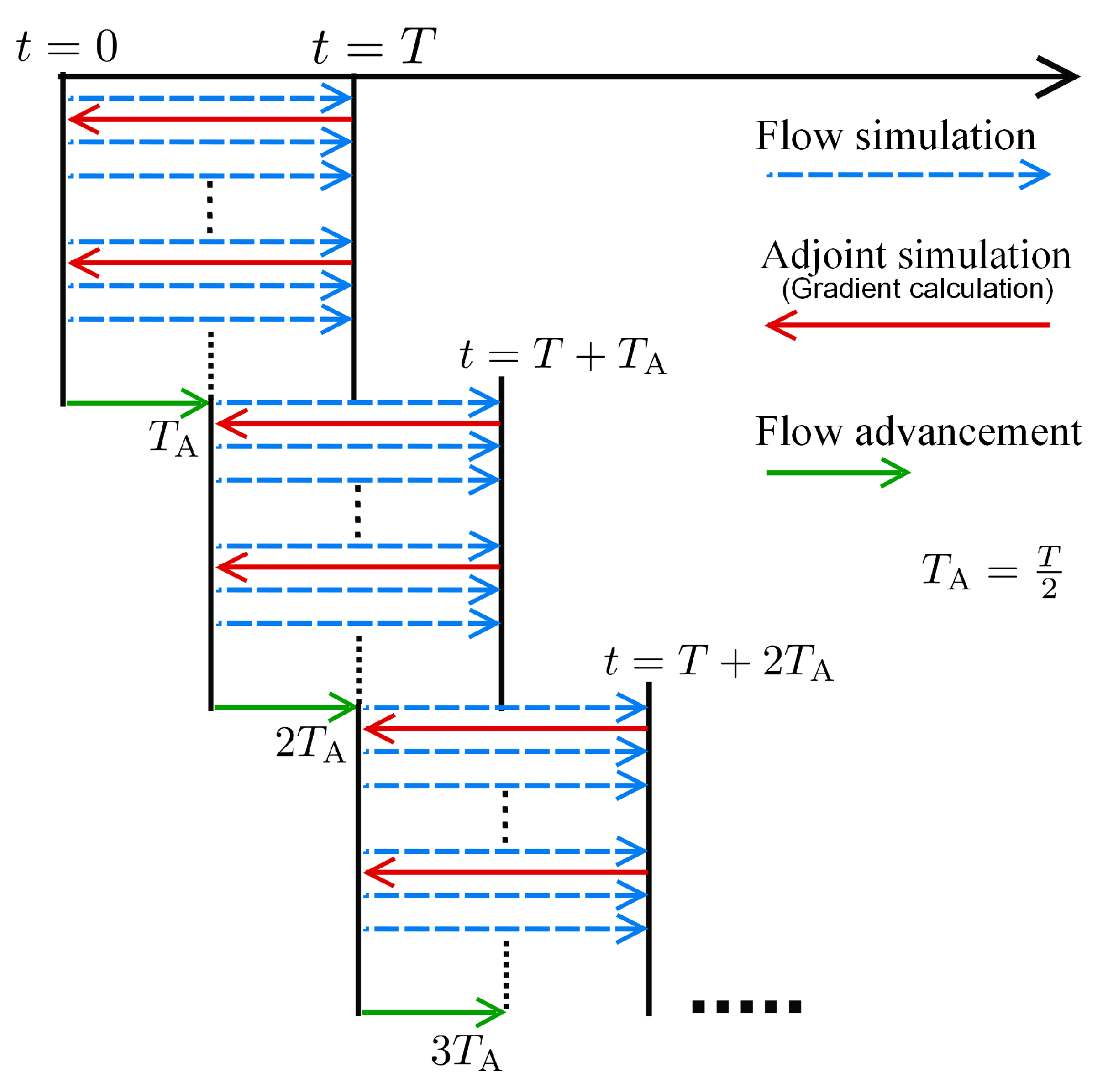
2.2. Optimal Control and Optimization Approach


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
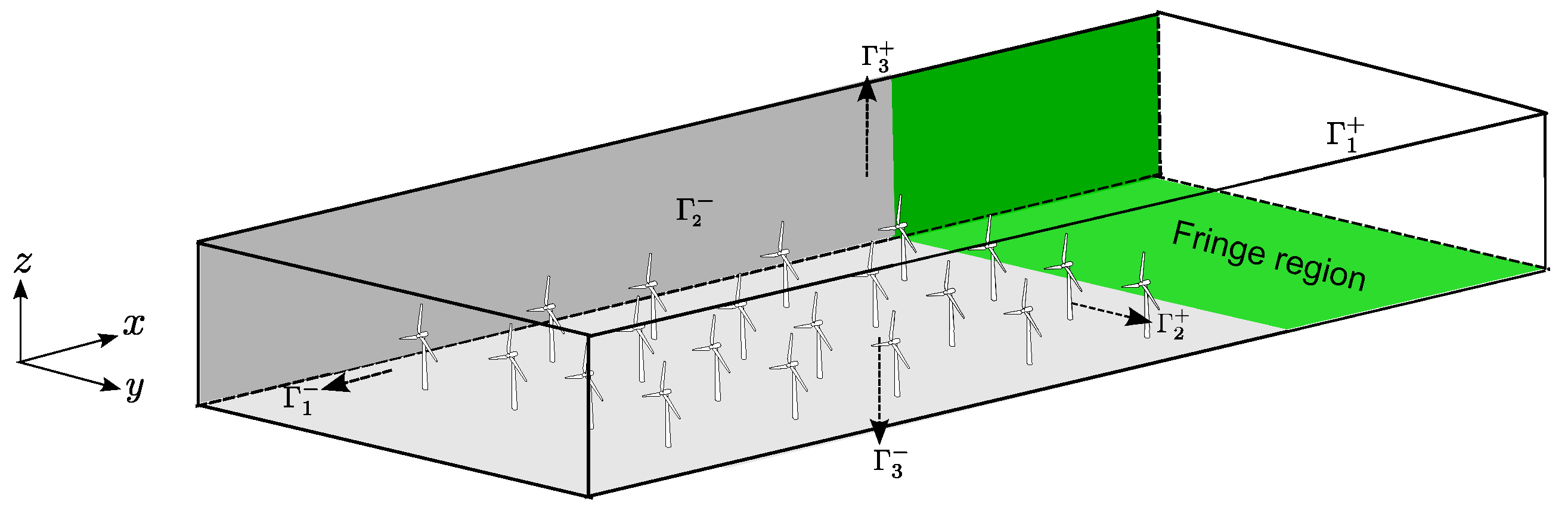
| Domain size | km |
| Fringe size | of km |
| Fringe region | Start: 8.5 km; End: 10 km |
| Driving pressure gradient | m/s |
| Turbine dimensions | m, m |
| Turbine arrangement | |
| Turbine spacing | , and |
| Surface roughness | m |
| Grid size | |
| Cell size | m |
| Time step | 0.6 s |
2.3. Case Set-up
3. Results and Discussion
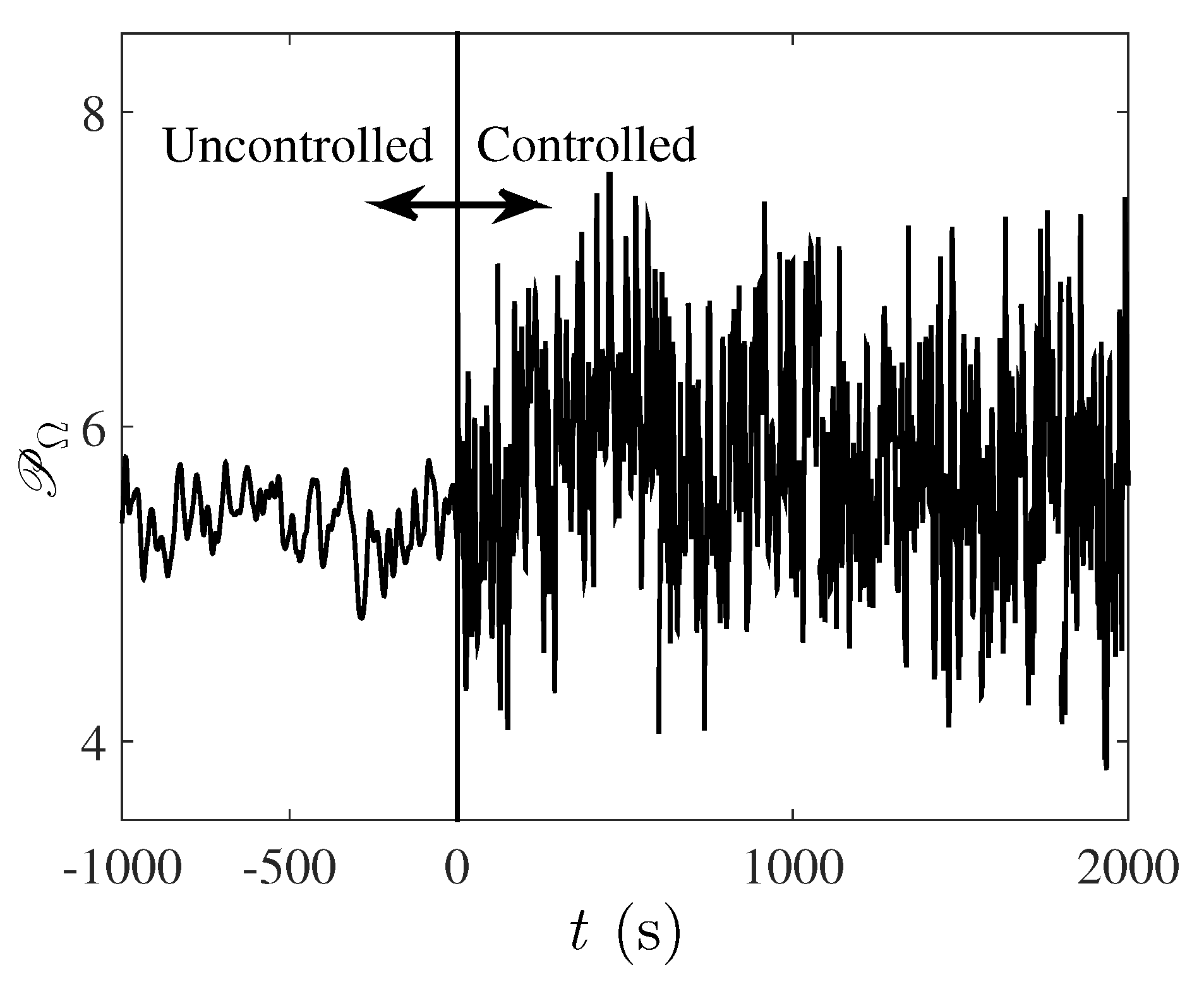
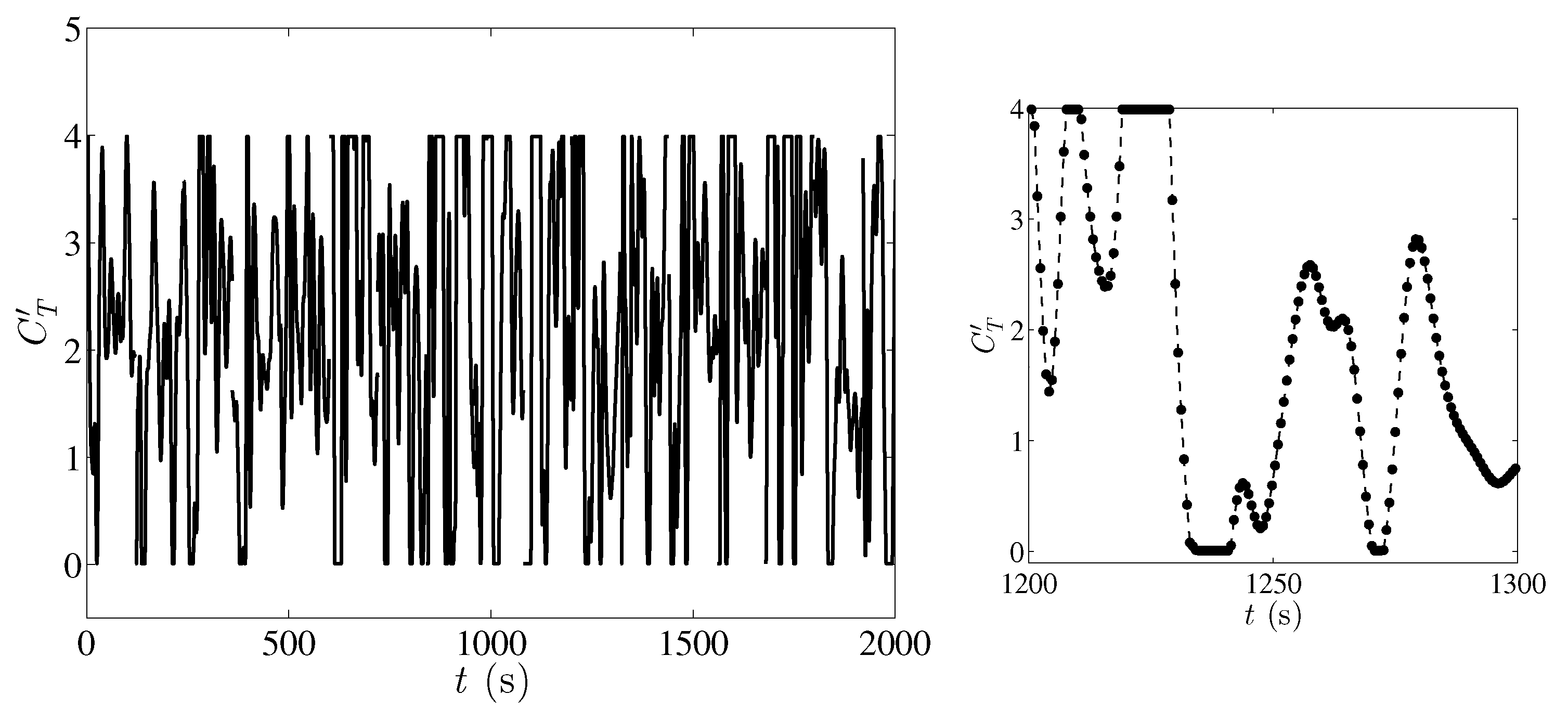
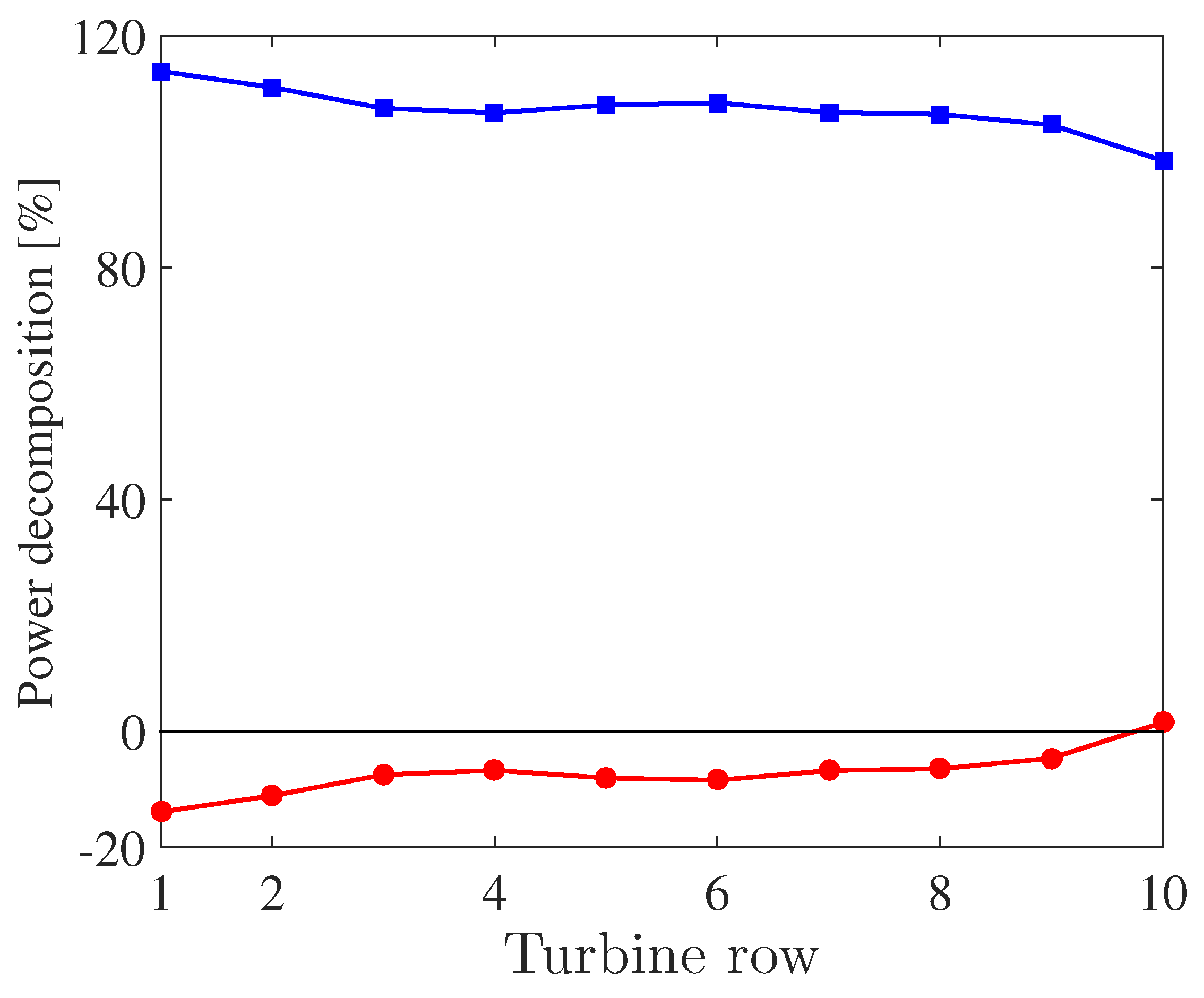
3.1. Controls and Optimized Power Output




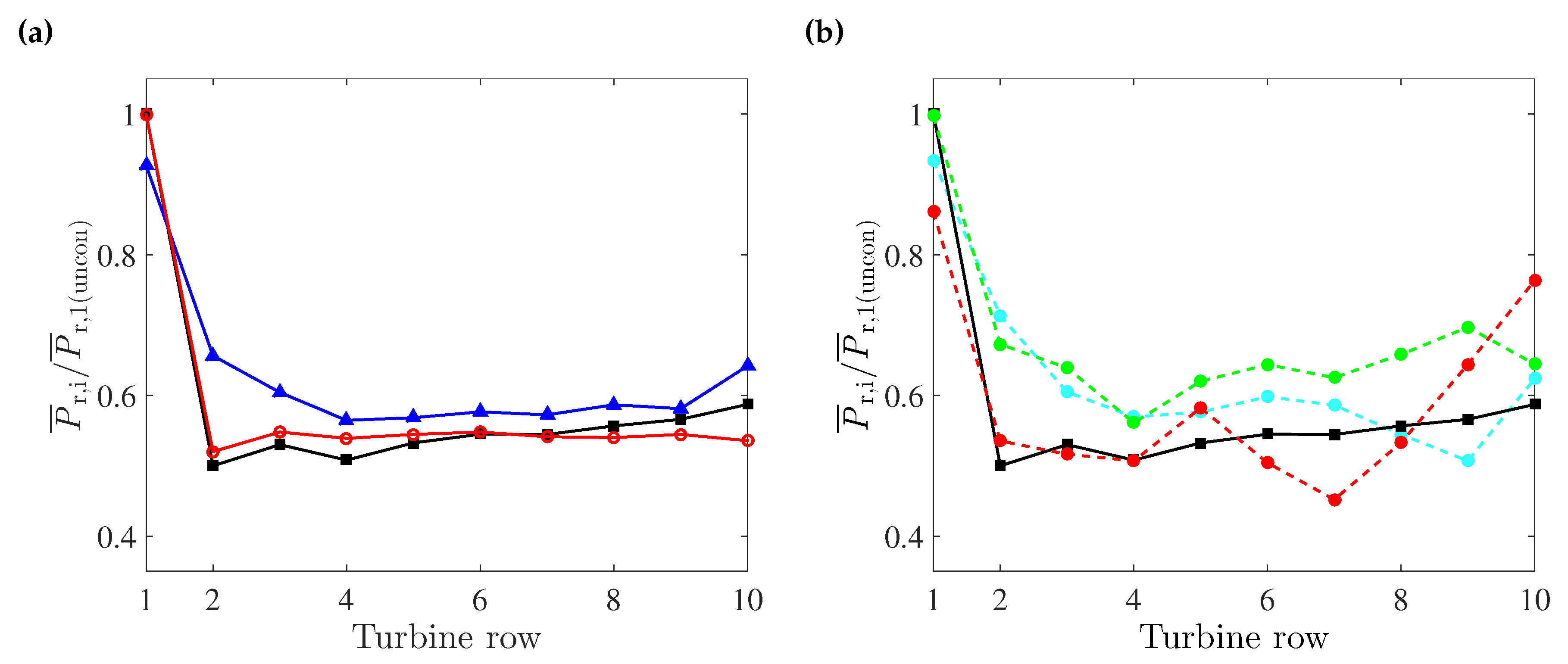
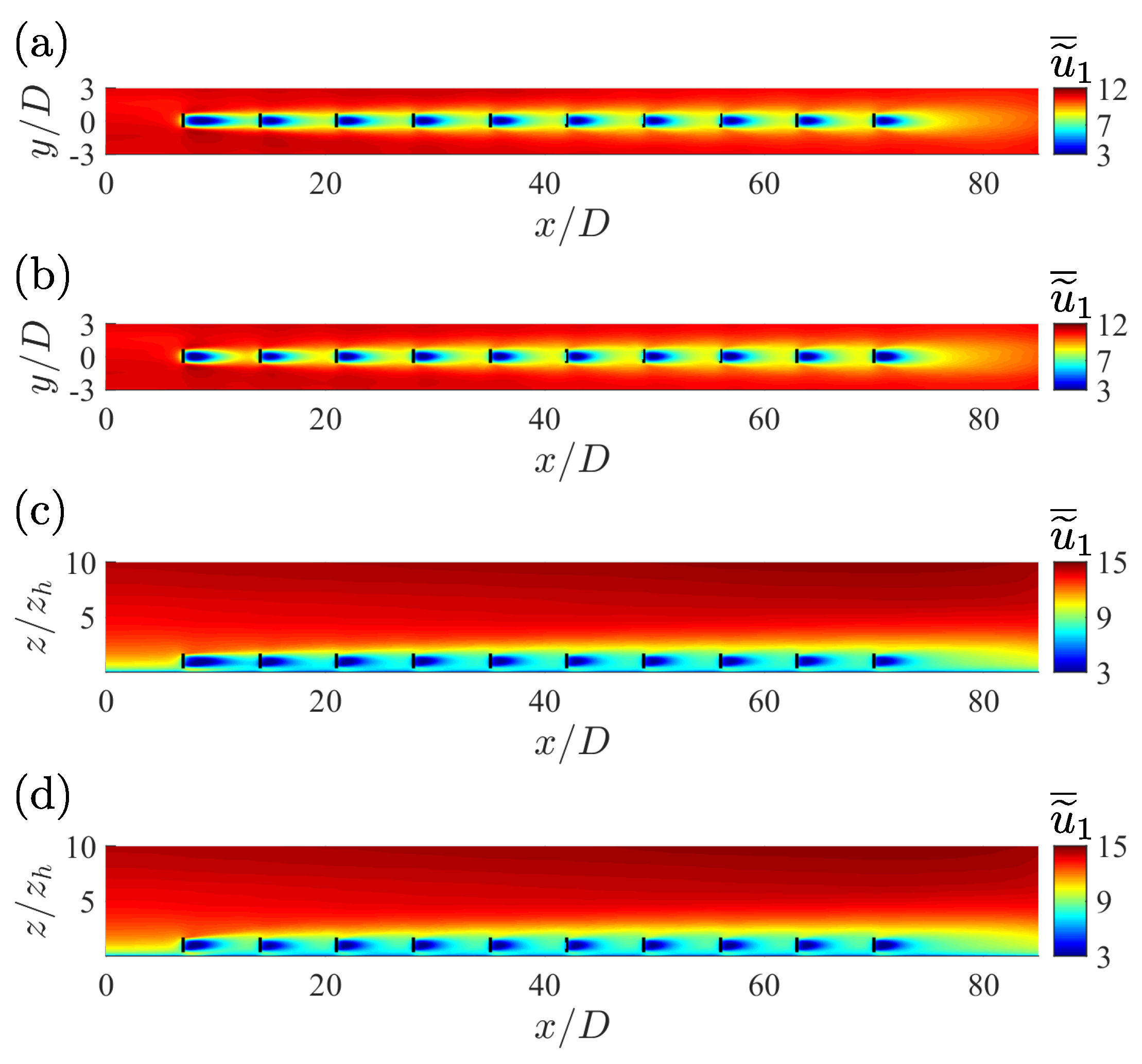
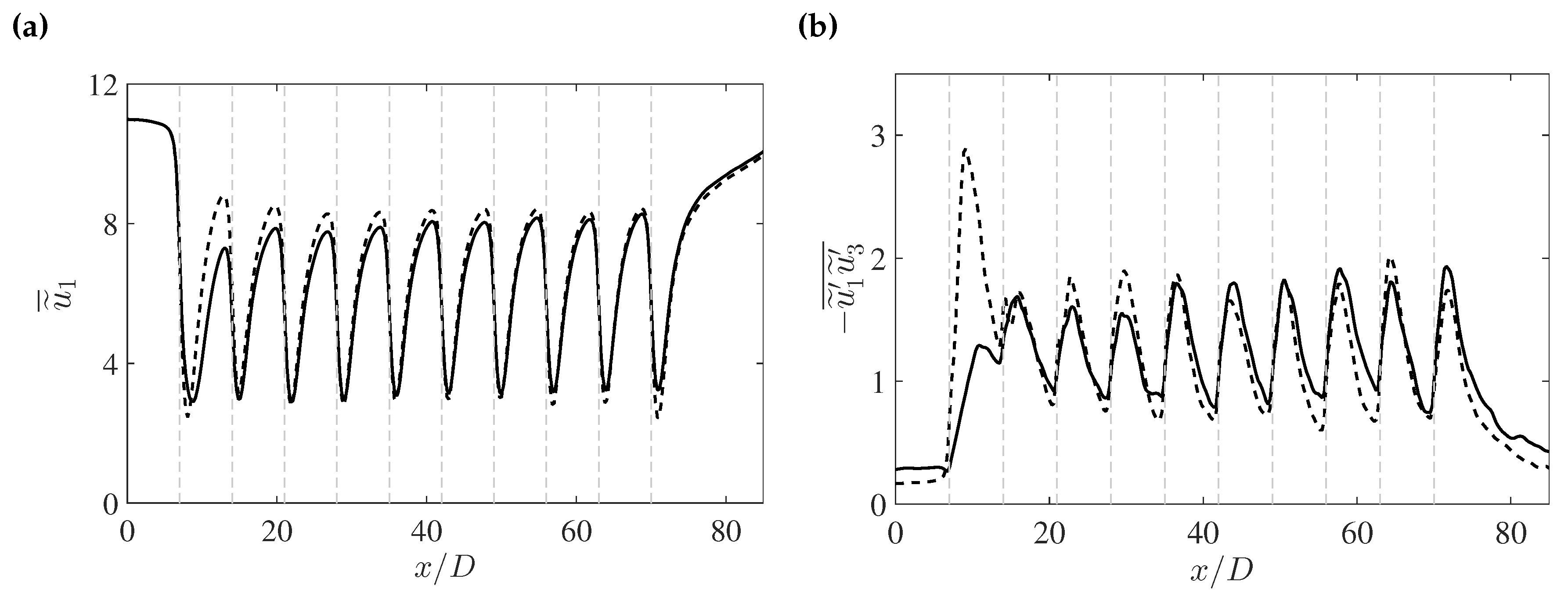
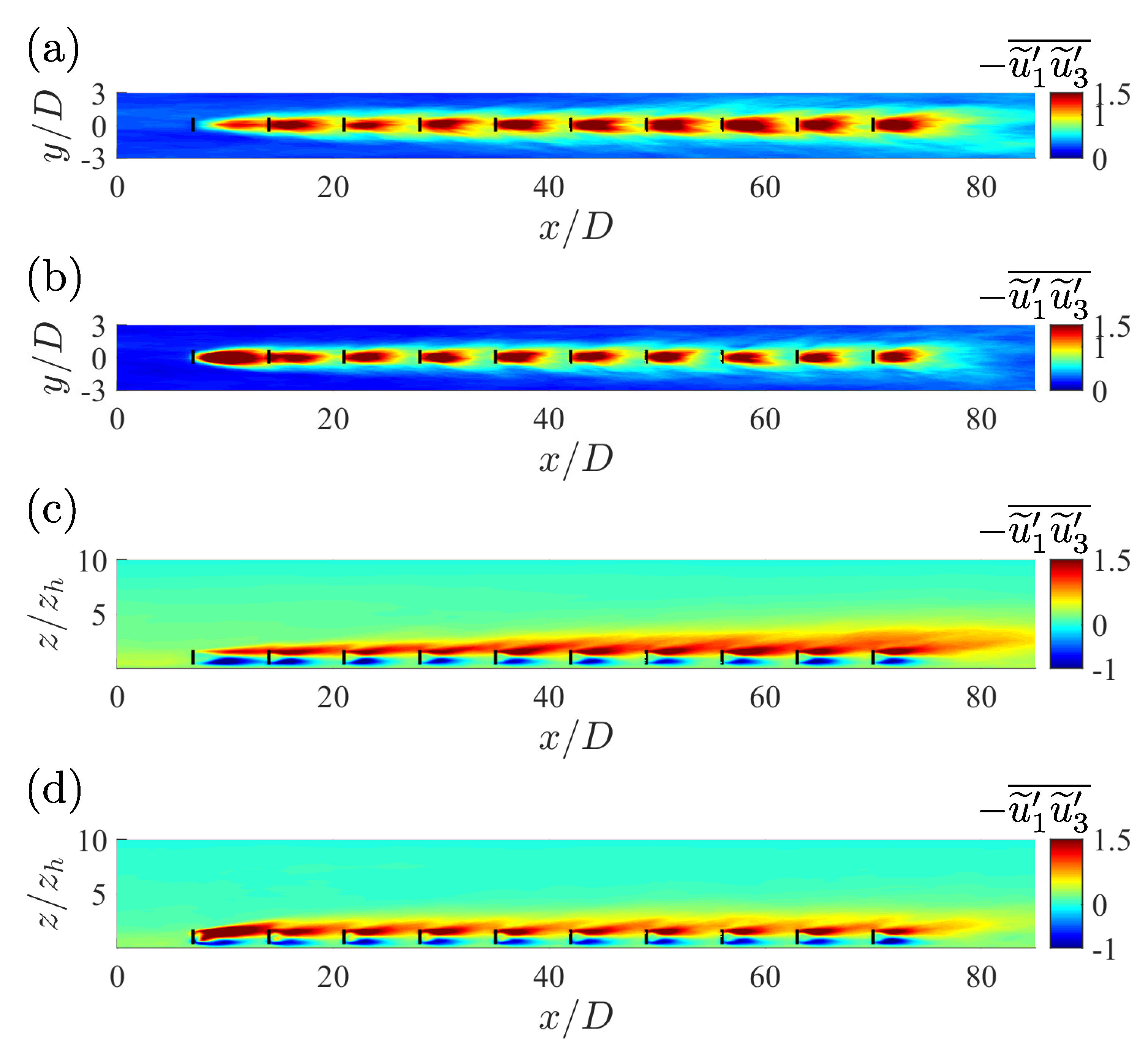
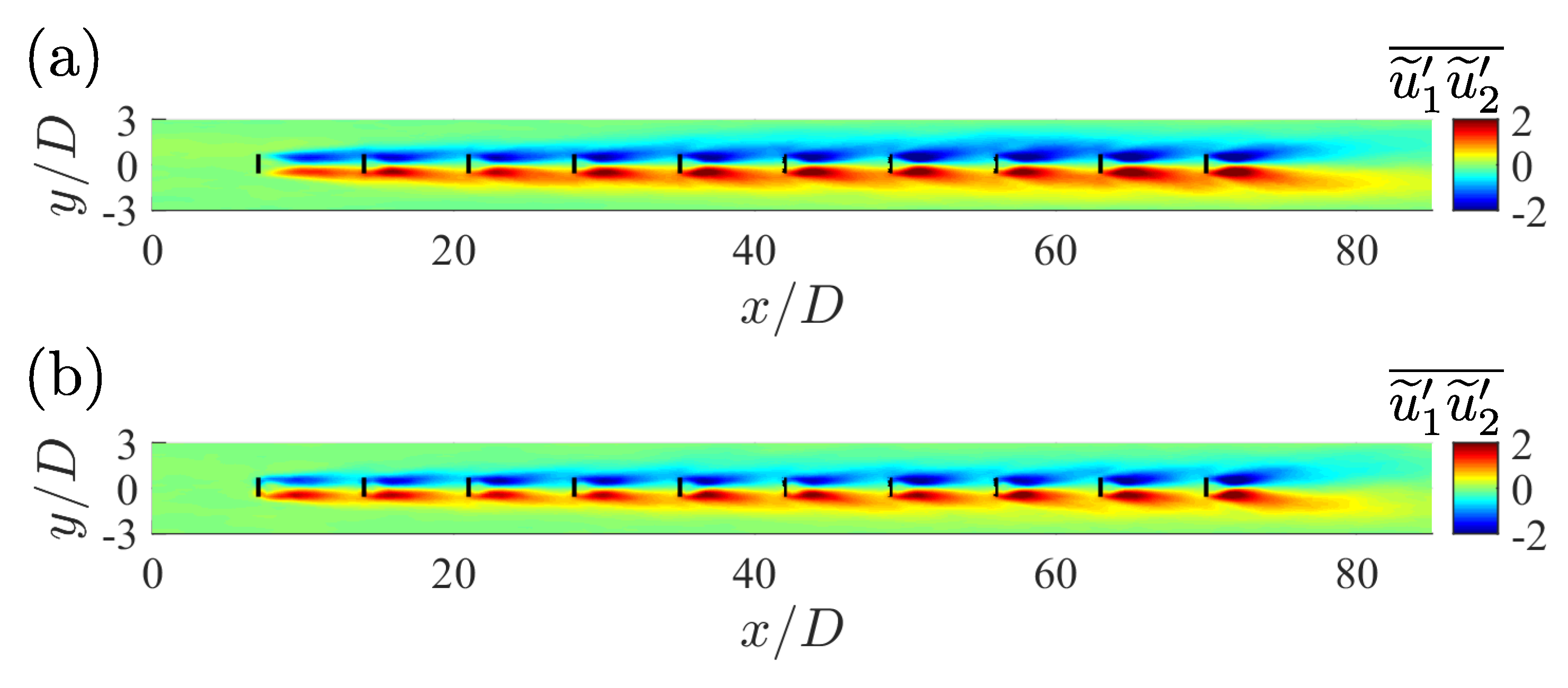
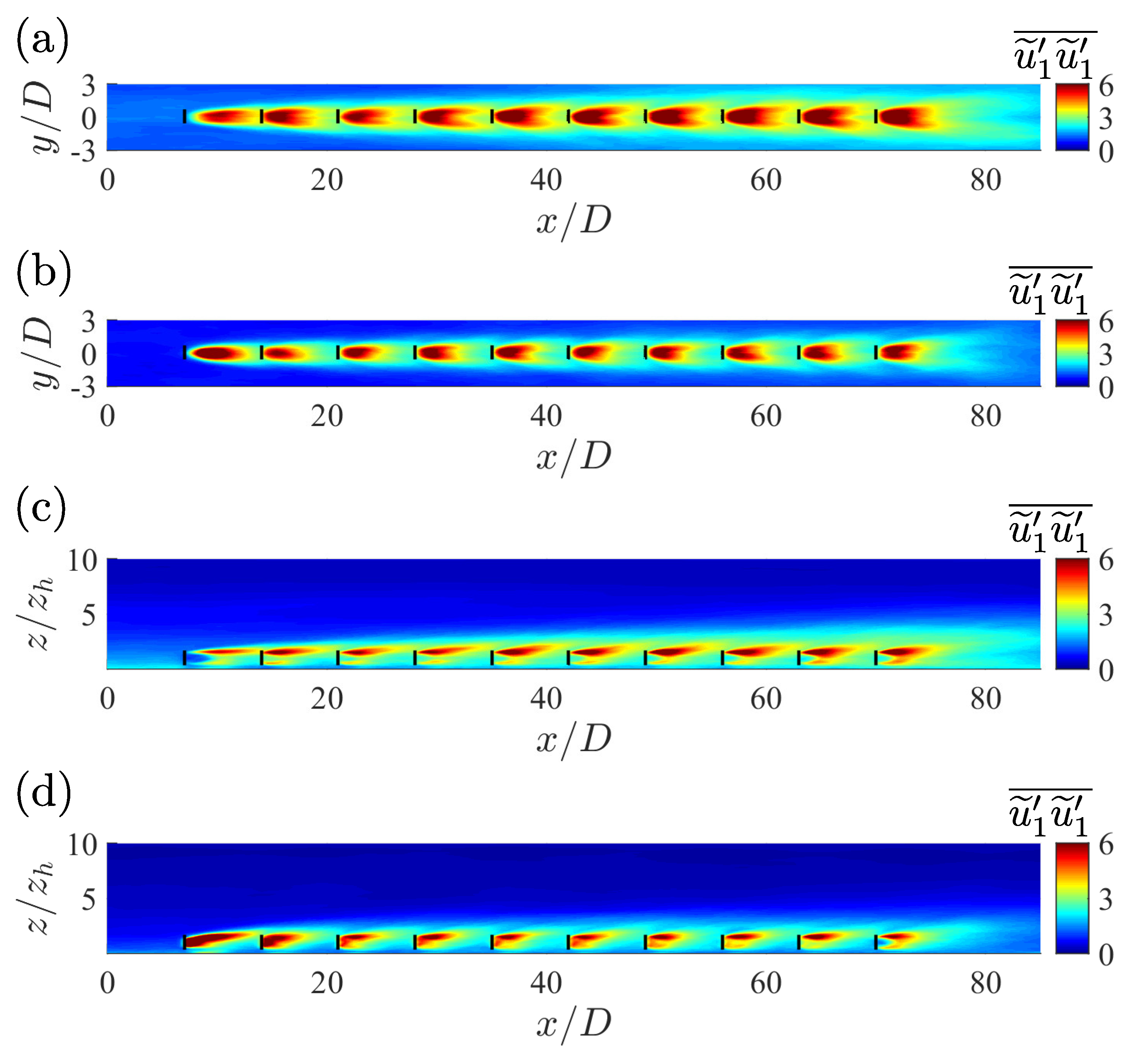
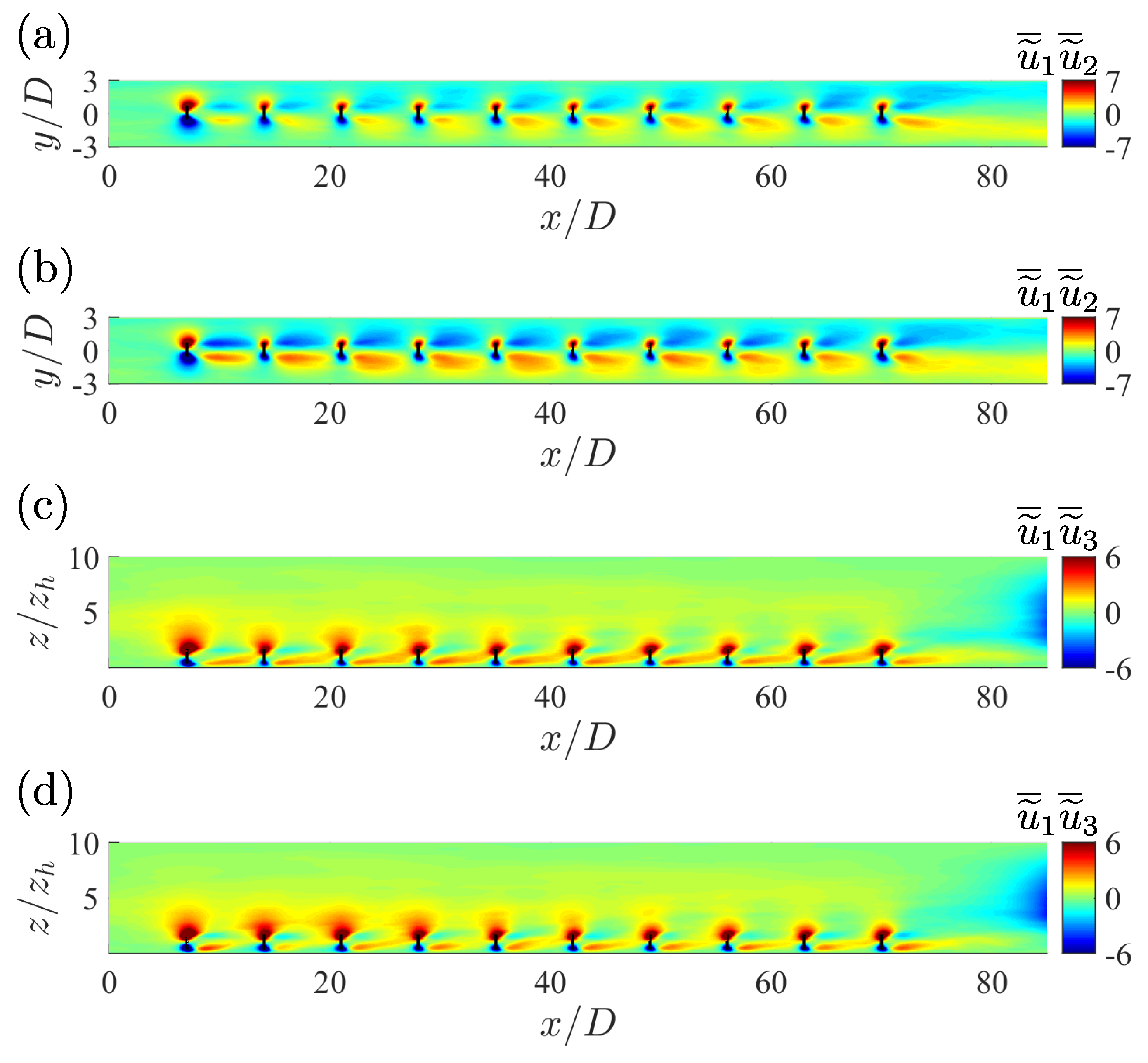
3.2. Averaged Flow Statistics







4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Barthelmie, R.; Rathmann, O.; Frandsen, S.T.; Hansen, K.; Politis, E.; Prospathopoulos, J.; Rados, K.; Cabezón, D.; Schlez, W.; Phillips, J.; et al. Modelling and measurements of wakes in large wind farms. J. Phys.: Conf. Ser. 2007, 75, 012049. [Google Scholar] [CrossRef]
- Barthelmie, R.; Pryor, S.; Frandsen, S.; Hansen, K.; Schepers, J.G.; Rados, K.; Schlez, W.; Neubert, A.; Jensen, L.E.; Neckelmann, S.; et al. Quantifying the impact of wind turbine wakes on power output at offshore wind farms. J. Atmos. Ocean. Technol. 2010, 27, 1302–1317. [Google Scholar] [CrossRef]
- Goit, J.P.; Meyers, J. Optimal control of energy extraction in wind farm boundary layers. J. Fluid Mech. 2015, 768, 5–50. [Google Scholar] [CrossRef] [Green Version]
- Steinbuch, M.; de Boer, W.W.; Bosgra, O.H.; Peters, S.; Ploeg, J. Optimal control of wind power plants. J. Wind Eng. Ind. Aerodyn. 1988, 27, 237–246. [Google Scholar] [CrossRef]
- Johnson, K.E.; Thomas, N. Wind farm control: Addressing the aerodynamic interaction among wind turbines. In Proceedings of the American Control Conference (ACC ’09), St. Louis, MO, USA, 10–12 June 2009; pp. 2104–2109.
- Horvat, T.; Spudic, V.; Baotic, M. Quasi-stationary optimal control for wind farm with closely spaced turbines. In Proceedings of the 35th International Convention (MIPRO Croatian Society), Opatija, Croatia, 21–25 May 2012; pp. 829–834.
- Soleimanzadeh, M.; Wisniewski, R.; Kanev, S. An optimization framework for load and power distribution in wind farms. J. Wind Eng. Ind. Aerodyn. 2012, 107–108, 256–262. [Google Scholar] [CrossRef]
- Knudsen, T.; Bak, T.; Svenstrup, M. Survey of wind farm control–power and fatigue optimization. Wind Energy 2014, 8, 1333–1351. [Google Scholar] [CrossRef]
- Gebraad, P.M.O. Data-driven Wind Plant Control. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2014. [Google Scholar]
- Park, P.; Holm, R.; Medici, D. The application of PIV to the wake of a wind turbine in yaw. In Proceedings of the 4th International Symposium on Particle Image Velocimetry, Gottingen, Germany, 17–19 September 2001.
- Fleming, P.A.; Gebraad, P.M.; Lee, S.; van Wingerden, J.W.; Johnson, K.; Churchfield, M.; Michalakes, J.; Spalart, P.; Moriarty, P. Evaluating techniques for redirecting turbine wakes using SOWFA. Renew. Energy 2014, 70, 211–218. [Google Scholar] [CrossRef]
- Gebraad, P.M.O.; Teeuwisse, F.W.; van Wingerden, J.W.; Fleming, P.A.; Ruben, S.D.; Marden, J.R.; Pao, L.Y. Wind plant power optimization through yaw control using a parametric model for wake effects-a CFD simulation study. Wind Energy 2014, 1822, 1–20. [Google Scholar] [CrossRef]
- Hansen, A.D.; Sørensen, P.; Iov, F.; Blaabjerg, F. Centralised power control of wind farm with doubly fed induction generators. Renew. Energy 2006, 31, 935–951. [Google Scholar] [CrossRef]
- Soleimanzadeh, M.; Wisniewski, R.; Johnson, K. A distributed optimization framework for windfarms. J. Wind Eng. Ind. Aerodyn. 2013, 123, 88–98. [Google Scholar] [CrossRef]
- Yang, Z.; Li, Y.; Seem, Y. Maximizing wind farm energy capture via nested-loop extremum seeking control. In Proceedings of the ASME Dynamic Systems and Control Conference, Palo Alto, CA, USA, 21–23 October 2013.
- Marden, J.R.; Ruben, S.D.; Pao, L.Y. A model-free approach to wind farm control using game theoretic methods. IEEE Trans. Control Syst. Technol. 2013, 21, 1207–1214. [Google Scholar] [CrossRef]
- Gebraad, P.M.O.; van Wingerden, J.W. Maximum power-point tracking control for wind farms. Wind Energy 2014, 18, 429–447. [Google Scholar] [CrossRef]
- Ahmad, M.A.; Azuma, S.; Sugie, T. A model-free approach for maximizing power production of wind farm using multi-resolution simultaneous perturbation stochastic approximation. Energies 2014, 7, 5624–5646. [Google Scholar] [CrossRef] [Green Version]
- Katić, I.; Hojstrup, J.; Jensen, N.O. A Simple Model for Cluster Efficiency; European Wind Energy Association Conference and Exhibition: Rome, Italy, 1986; pp. 407–410. [Google Scholar]
- Porté-Agel, F.; Wu, Y.; Chen, C. A numerical study of the effects of wind direction on turbine wakes and power losses in a large wind farm. Energies 2013, 6, 5297–5313. [Google Scholar] [CrossRef]
- Stevens, R.J.A.M.; Gayme, D.F.; Meneveau, C. Effects of turbine spacing on the power output of extended wind farms. Wind Energy 2016, in press. [Google Scholar] [CrossRef]
- Abkar, M.; Porté-Agel, F. Influence of atmospheric stability on wind-turbine wakes: A large-eddy simulation study. Phys. Fluids 2015, 27, 035104. [Google Scholar] [CrossRef]
- Abkar, M.; Porté-Agel, F. The effect of free-atmosphere stratification on boundary-layer flow and power output from very large wind farms. Energies 2013, 6, 2338–2361. [Google Scholar] [CrossRef]
- Allaerts, D.; Meyers, J. Large eddy simulation of a large wind-turbine array in a conventionally neutral atmospheric boundary layer. Phys. Fluids 2015, 27, 065108. [Google Scholar] [CrossRef]
- Meyers, J.; Sagaut, P. Evaluation of smagorinsky variants in large-eddy simulations of wall-resolved plane channel flows. Phys. Fluids 2007, 19, 095105. [Google Scholar] [CrossRef] [Green Version]
- Delport, S.; Baelmans, M.; Meyers, J. Constrained optimization of turbulent mixing-layer evolution. J. Turbul. 2009, 10, 1–26. [Google Scholar] [CrossRef]
- Meyers, J.; Meneveau, C. Large eddy simulations of large wind-turbine arrays in the atmospheric boundary layer. In Proceedings of the 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2010; pp. 1–10.
- Smagorinsky, J. General circulation experiments with the primitive equations: I. The basic experiment. Mon. Weather Rev. 1963, 91, 99–165. [Google Scholar] [CrossRef]
- Mason, P.J.; Thomson, T.J. Stochastic backscatter in large-eddy simulations of boundary layers. J. Fluid Mech. 1992, 242, 51–78. [Google Scholar] [CrossRef]
- Calaf, M.; Meneveau, C.; Meyers, J. Large eddy simulation study of fully developed wind-turbine array boundary layers. Phys. Fluids 2010, 22, 015110. [Google Scholar] [CrossRef]
- Martinez Tossas, L.A.; Leonardi, S.; Moriarty, P. Wind Turbine Modeling for Computational Fluid Dynamics; NREL Technical Report SR-5000-55054; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2013.
- Wu, Y.-T.; Porté-Agel, F. Large-eddy simulation of wind-turbine wakes: Evaluation of turbine parametrisations. Bound.-Layer Meteorol. 2011, 138, 345–366. [Google Scholar] [CrossRef]
- Moeng, C.H. A large-eddy simulation model for the study of planetary boundary-layer turbulence. J. Atmos. Sci. 1984, 41, 2052–2062. [Google Scholar] [CrossRef]
- Bou-Zeid, E.; Meneveau, C.; Parlange, M.B. A scale-dependent Lagrangian dynamic model for large eddy simulation of complex turbulent flows. Phys. Fluids 2005, 17, 025105. [Google Scholar] [CrossRef]
- Spalart, P.R. Direct numerical study of leading edge contamination. In AGARD Conference Proceedings, Fluid Dynamics of Three-Dimensional Turbulent Shear Flows and Transition; Advisory Group for Aerospace Research and Development (AGARD): Neuilly-sur-Seine, France, 1988; Volume 438, pp. 5.1–5.13. [Google Scholar]
- Canuto, C.; Hussaini, M.Y.; Quarteroni, A.; Zang, T.A. Spectral Methods: Evolution to Complex Geometries and Application to Fluid Dynamics; Springer: Berlin, Germany, 2007. [Google Scholar]
- Verstappen, R.W.C.P.; Veldman, A.E.P. Symmetry-preserving discretization of turbulent flow. J. Comput. Phys. 2003, 187, 343–368. [Google Scholar] [CrossRef]
- Press, W.H.; Teukolsky, S.A.; Vetterling, W.T.; Flannery, B.P. Numerical Recipes in FORTRAN77: The Art of Scientific Computing, 2nd ed.; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar]
- Luenberger, D.G. Linear and Nonlinear Programming, 2nd ed.; Kluwer Academic Publishers: Boston, MA, USA, 2005. [Google Scholar]
- Nocedal, J.; Wright, S.J. Numerical Optimization, 2nd ed.; Springer: Berlin, Germany, 2006. [Google Scholar]
- Choi, H.; Hinze, M.; Kunisch, K. Instantaneous control of backward-facing step flows. Appl. Numer. Math. 1999, 31, 133–158. [Google Scholar] [CrossRef]
- Meyers, J.; Meneveau, C. Flow visualization using momentum and energy transport tubes and applications to turbulent flow in wind farms. J. Fluid Mech. 2013, 715, 335–358. [Google Scholar] [CrossRef] [Green Version]
- Stevens, R.J.A.M.; Graham, J.; Meneveau, C. A concurrent precursor inflow method for Large Eddy Simulations and applications to finite length wind farms. Renew. Energy 2014, 68, 46–50. [Google Scholar] [CrossRef]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; NREL Technical Report TP-500-38060; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2009.
- Badreddine, H.; Vandewalle, S.; Meyers, J. Sequential quadratic programming (SQP) for optimal control in direct numerical simulation of turbulent flow. J. Comput. Phys. 2014, 256, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Nita, C.; Vandewalle, S.; Meyers, J. On the efficiency of gradient based optimization algorithms for DNS-based optimal control in a turbulent channel flow. Comput. Fluids 2015, 125, 11–24. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Goit, J.P.; Munters, W.; Meyers, J. Optimal Coordinated Control of Power Extraction in LES of a Wind Farm with Entrance Effects. Energies 2016, 9, 29. https://doi.org/10.3390/en9010029
Goit JP, Munters W, Meyers J. Optimal Coordinated Control of Power Extraction in LES of a Wind Farm with Entrance Effects. Energies. 2016; 9(1):29. https://doi.org/10.3390/en9010029
Chicago/Turabian StyleGoit, Jay P., Wim Munters, and Johan Meyers. 2016. "Optimal Coordinated Control of Power Extraction in LES of a Wind Farm with Entrance Effects" Energies 9, no. 1: 29. https://doi.org/10.3390/en9010029