
A Hierarchical Method for Transient Stability Prediction of Power Systems Using the Confidence of a SVM-Based Ensemble Classifier


Abstract
:
1. Introduction
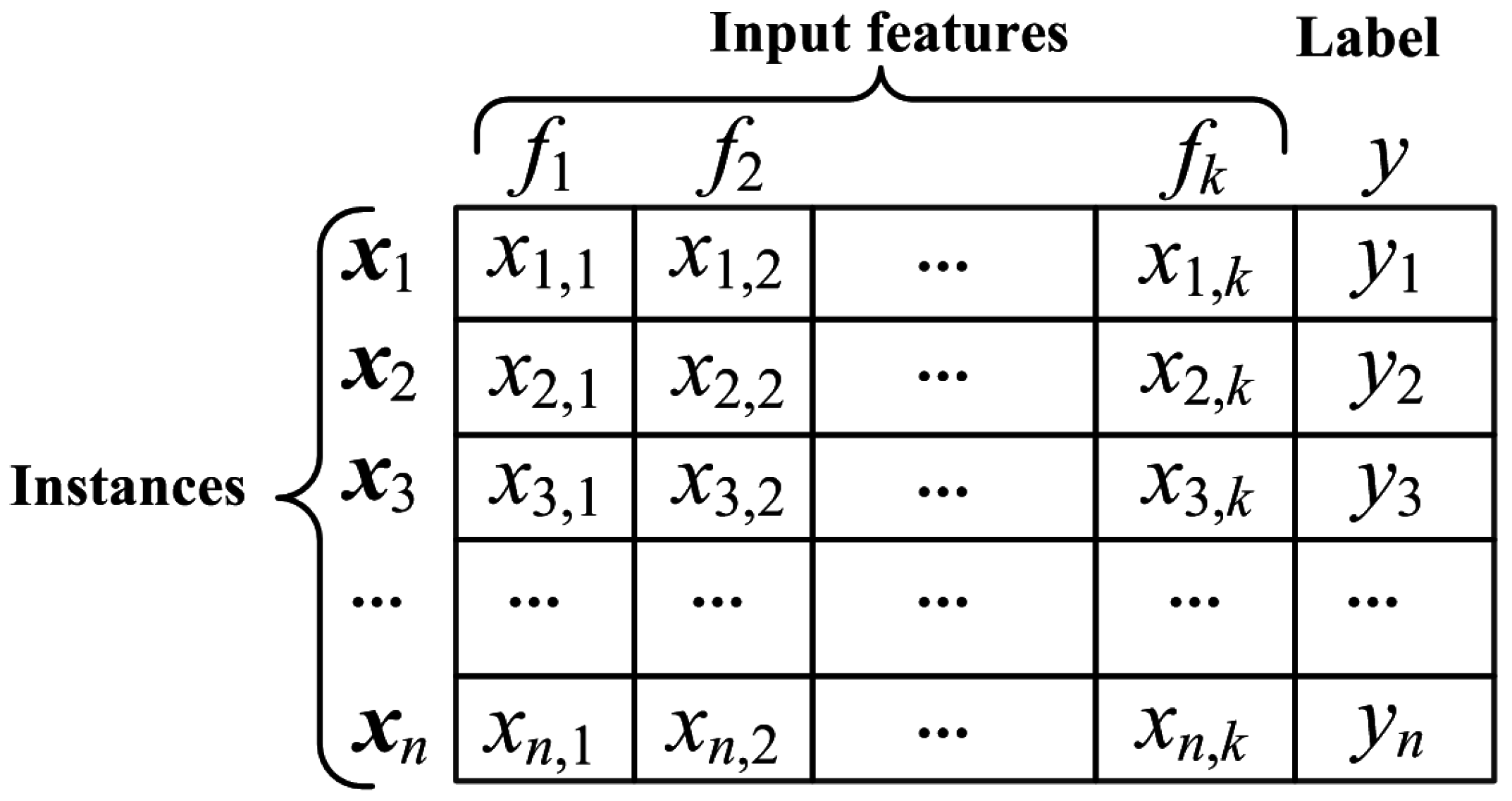
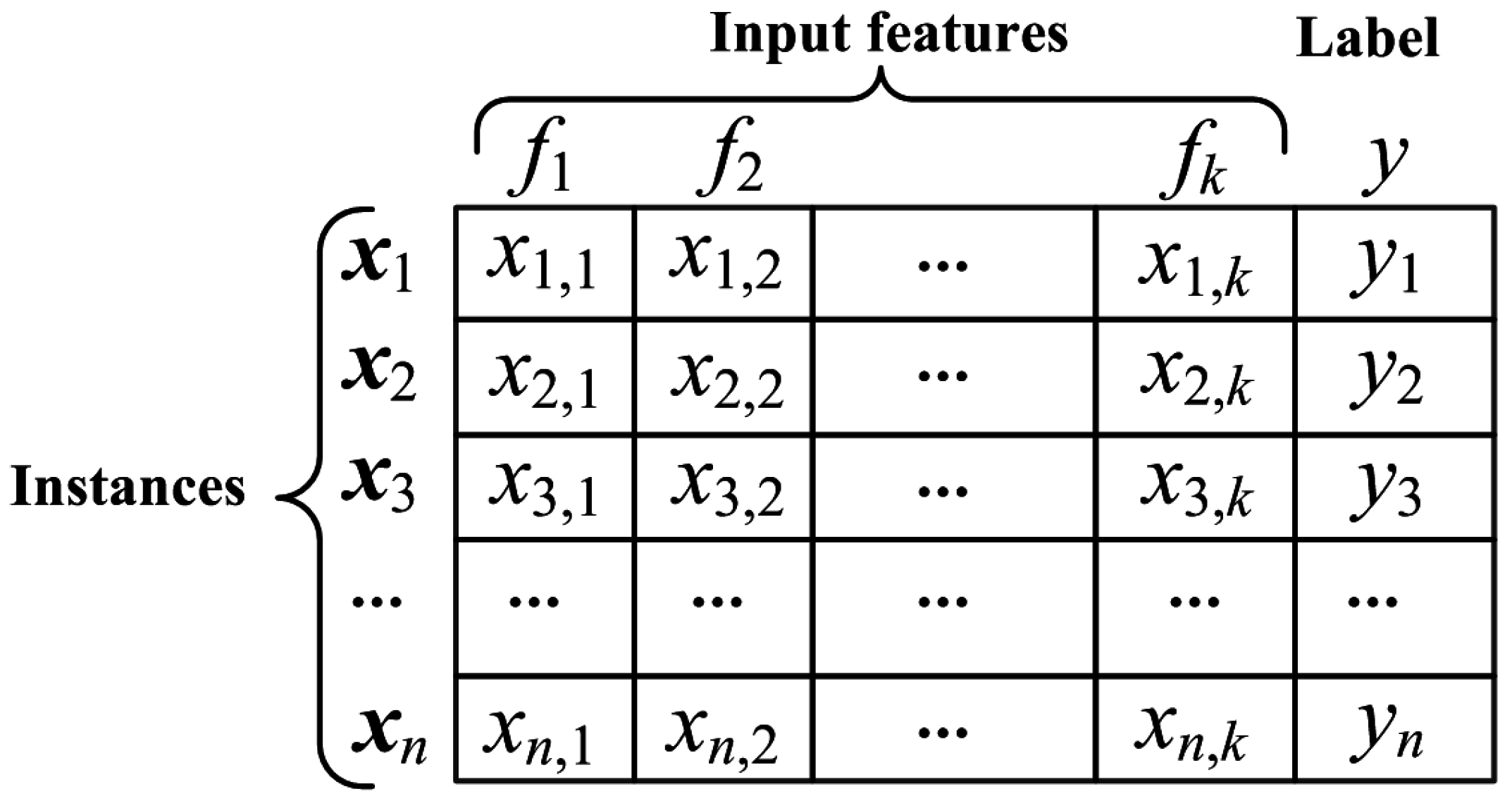
2. Generation of Dataset
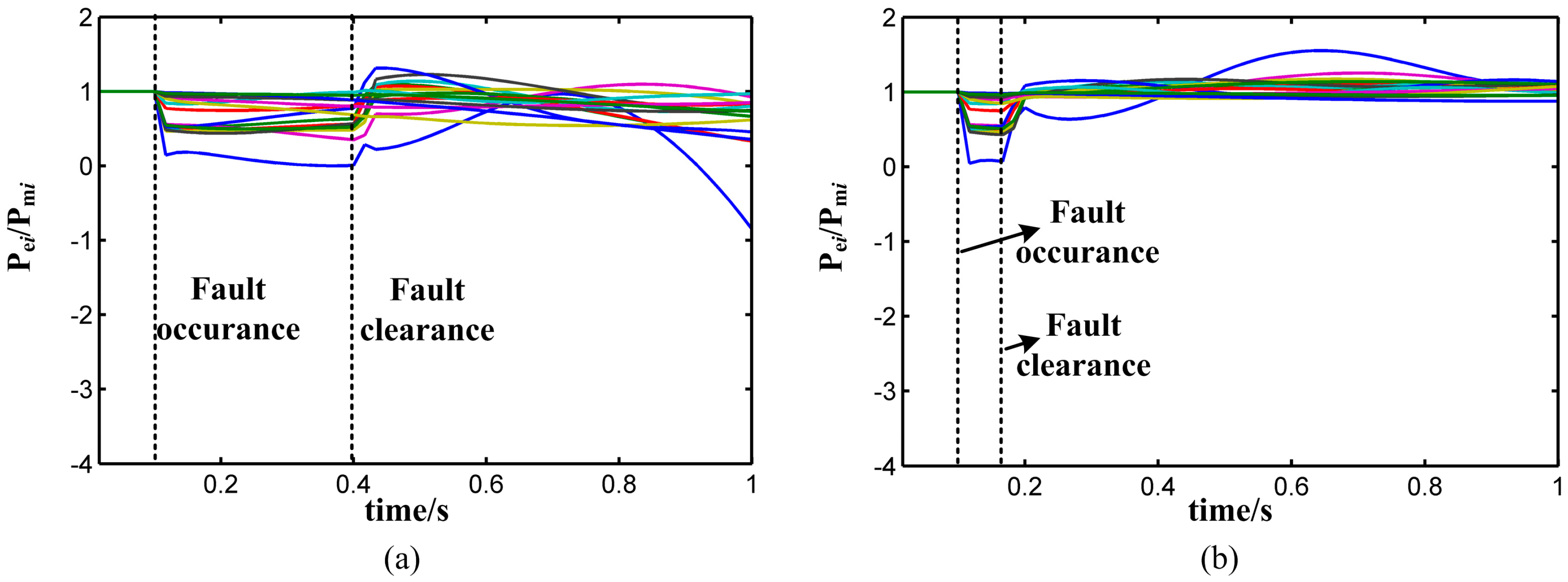
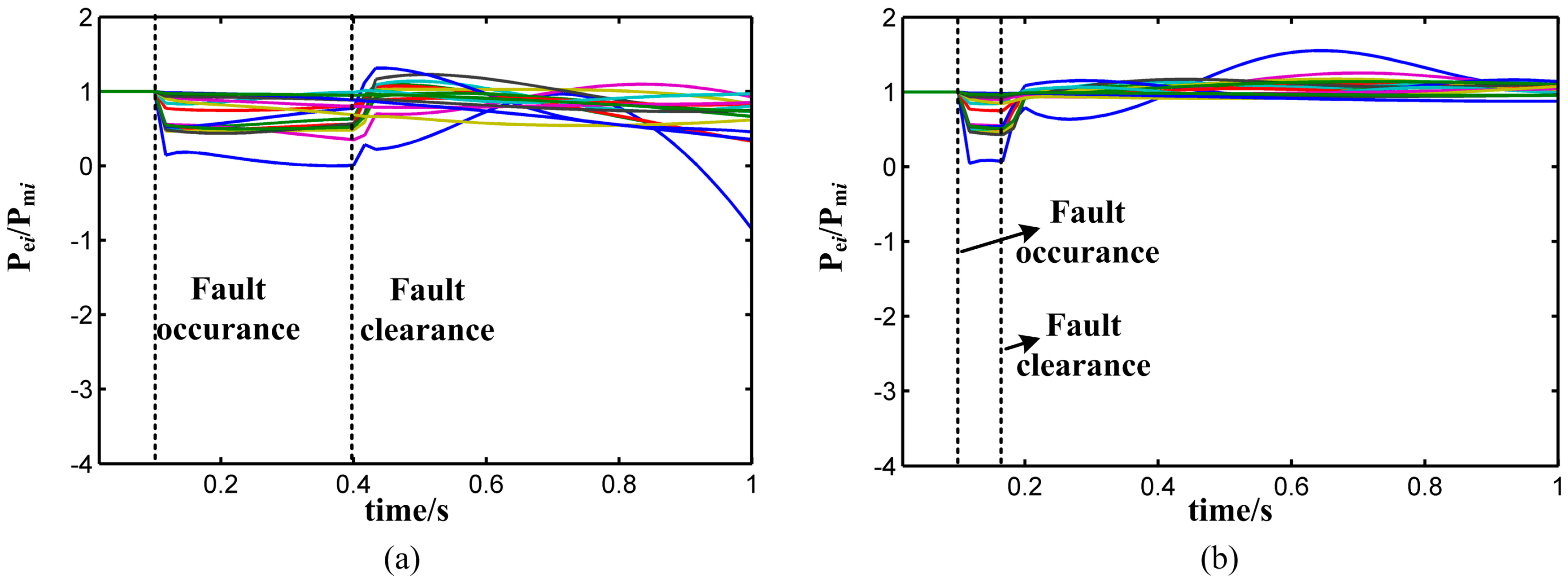
2.1. Generator Electromagnetic Powers
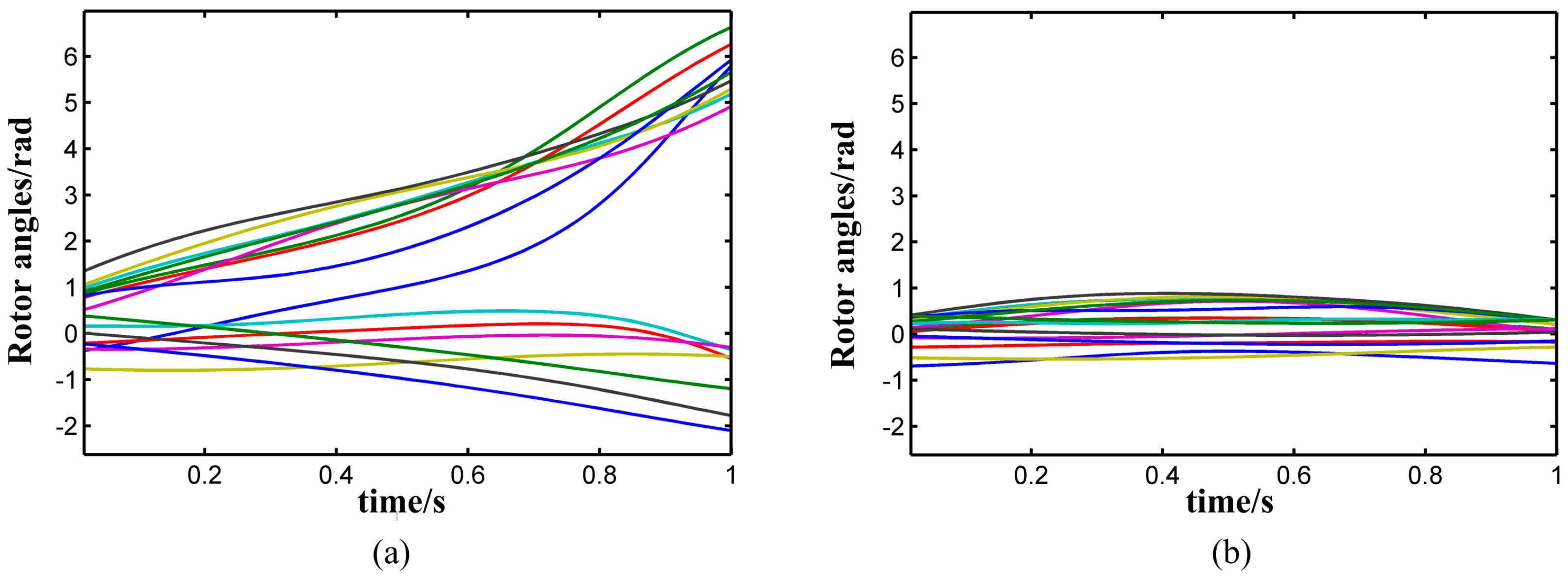
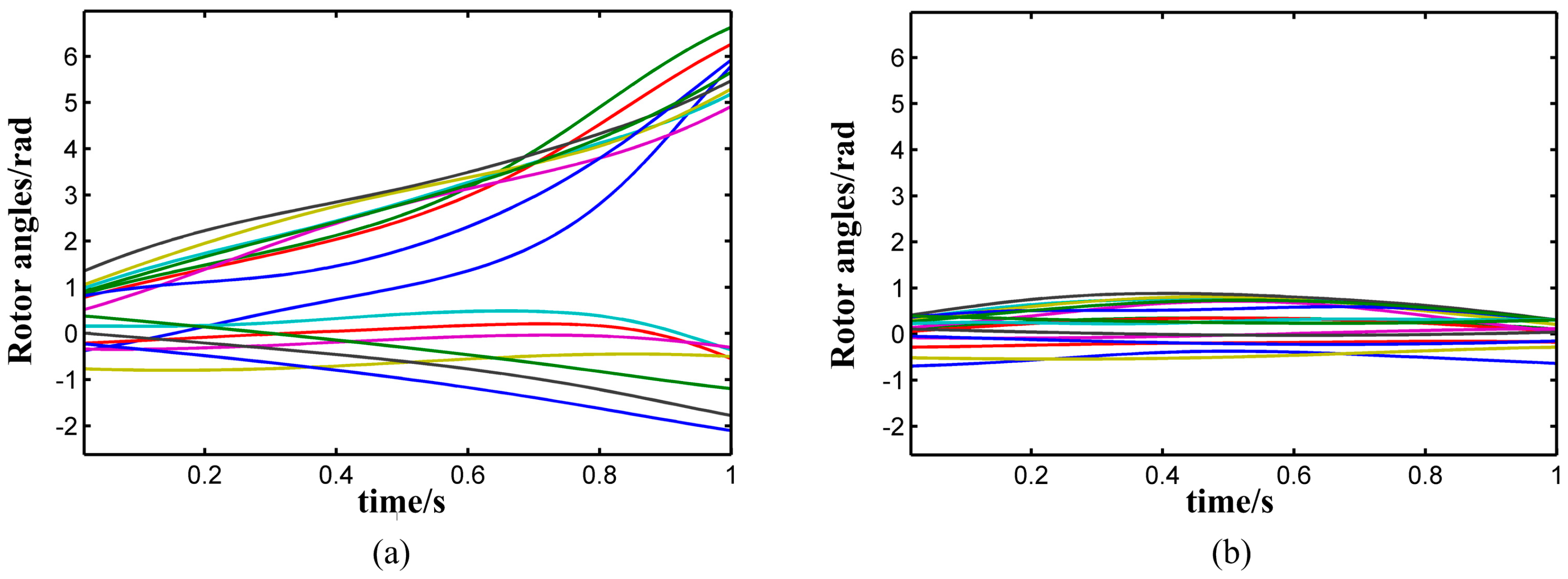
2.2. Generator Rotor Angles
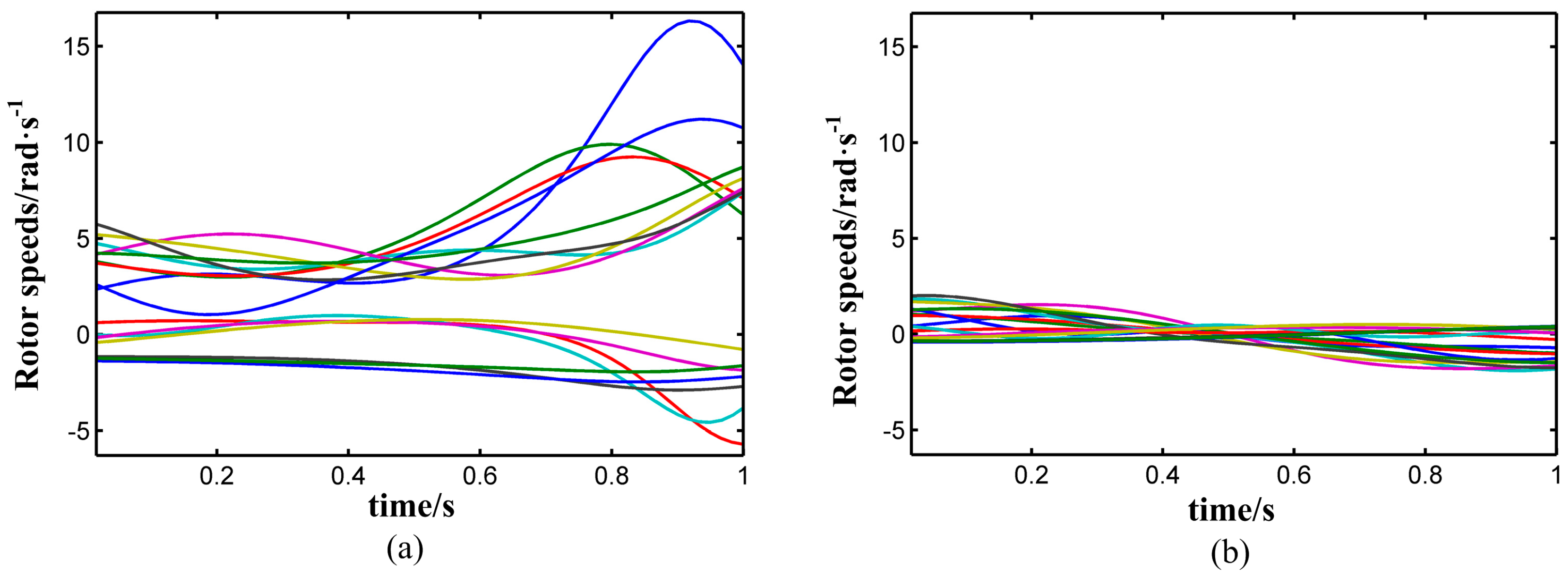
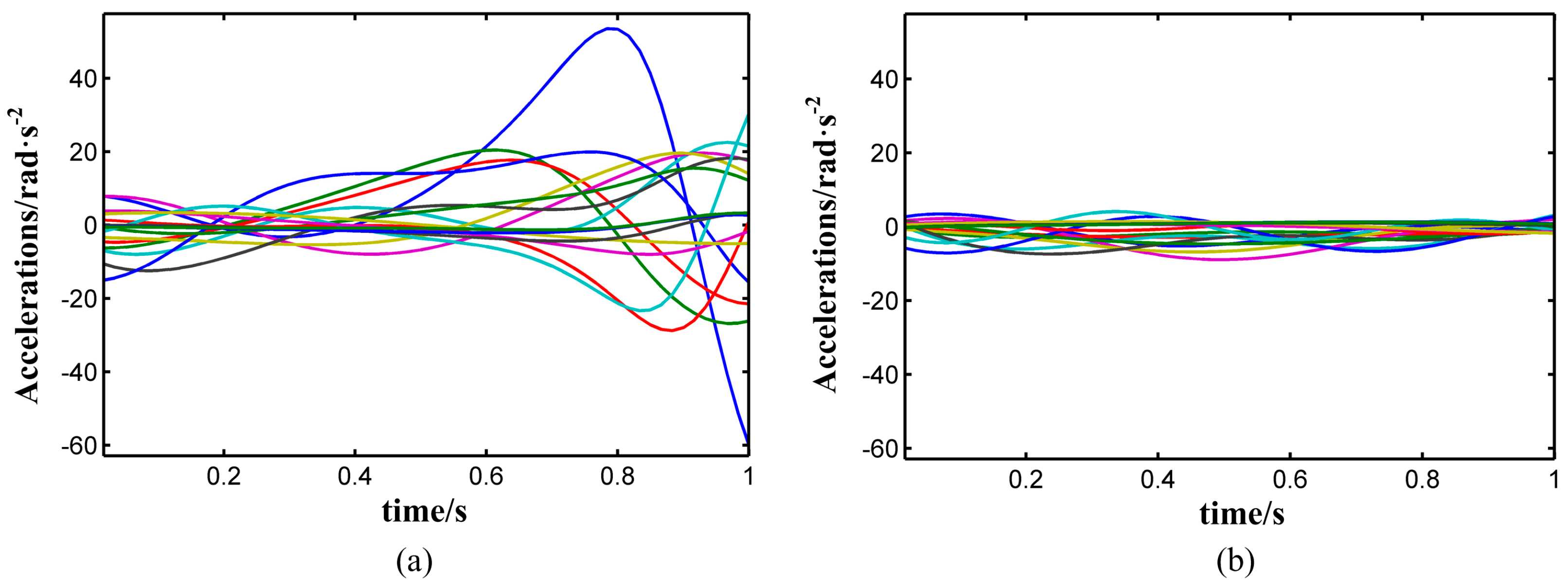
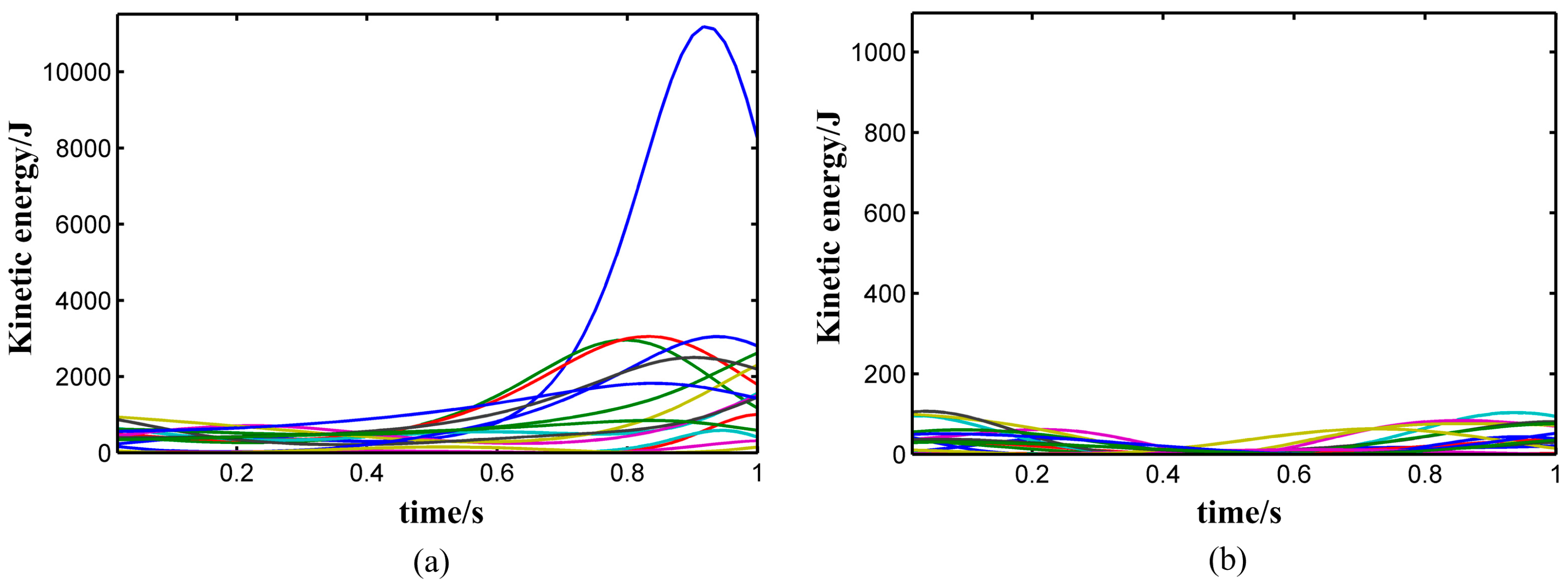
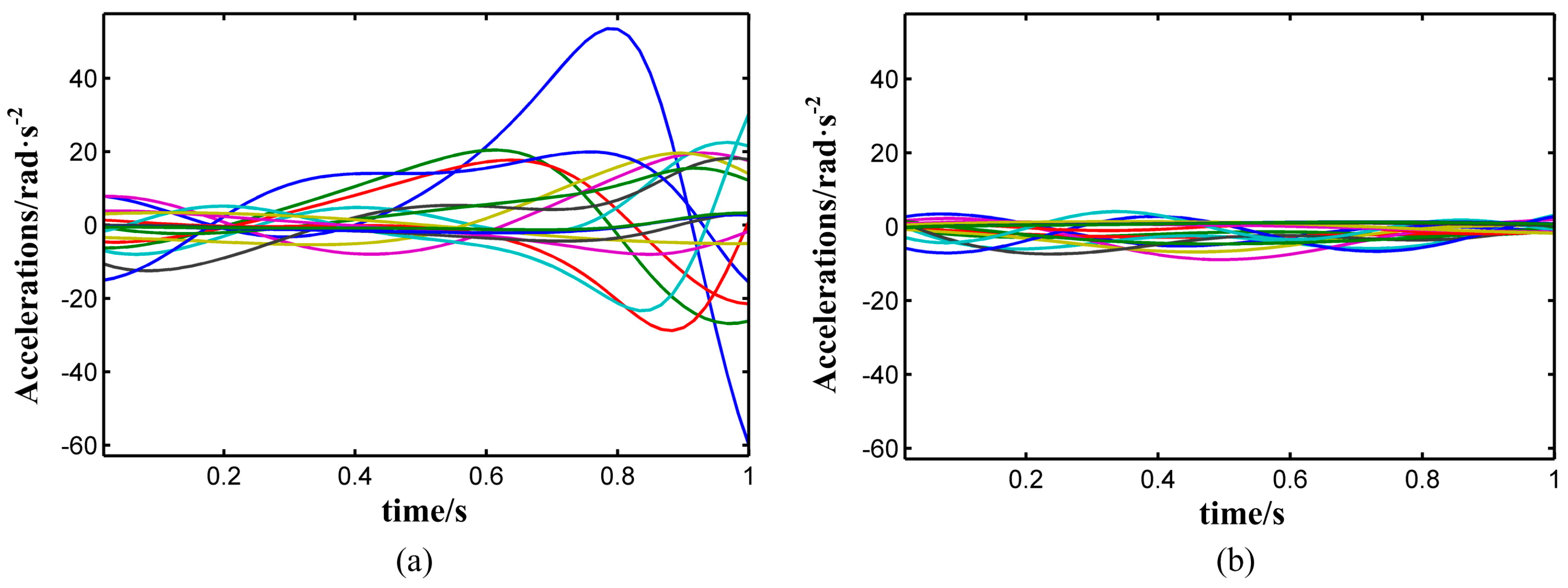
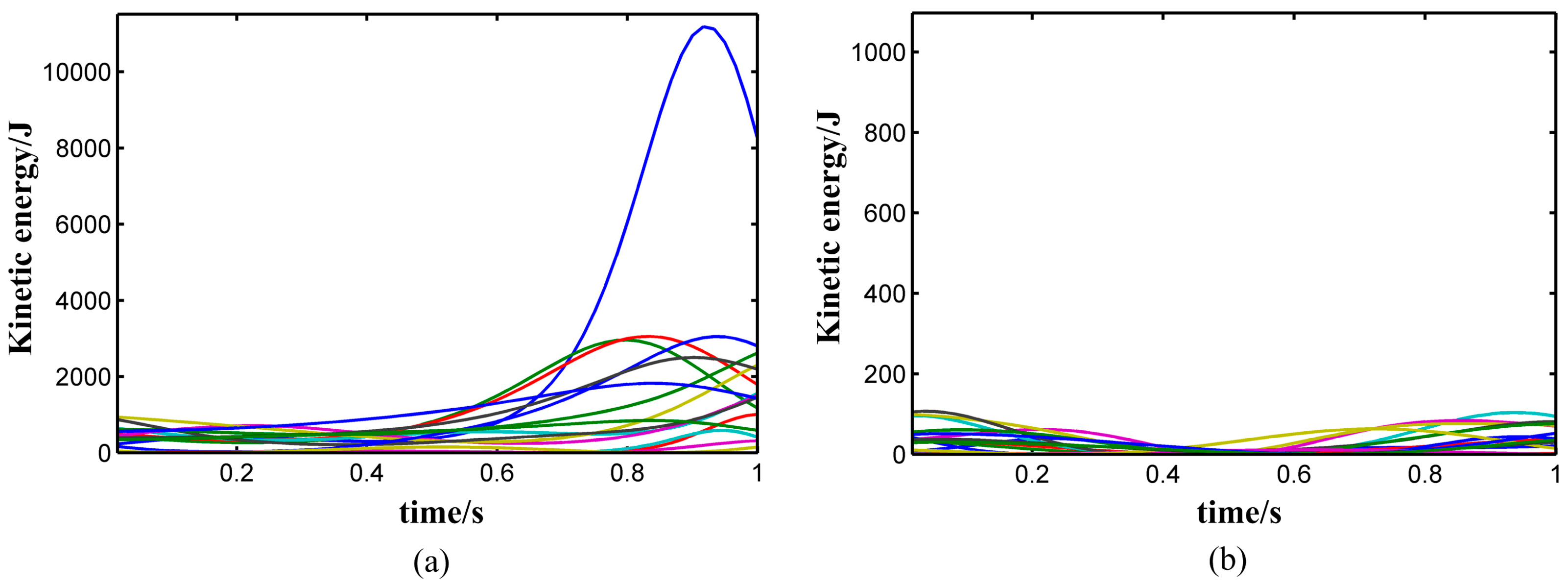
2.3. Other Useful Features
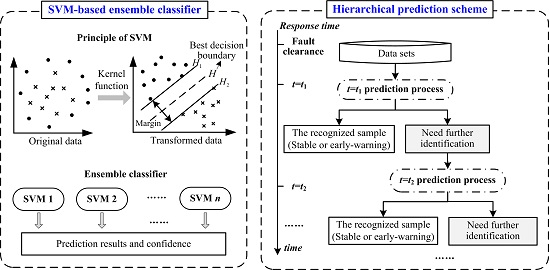
3. Support Vector Machine-Based Ensemble Classifier and Its Confidence Evaluation
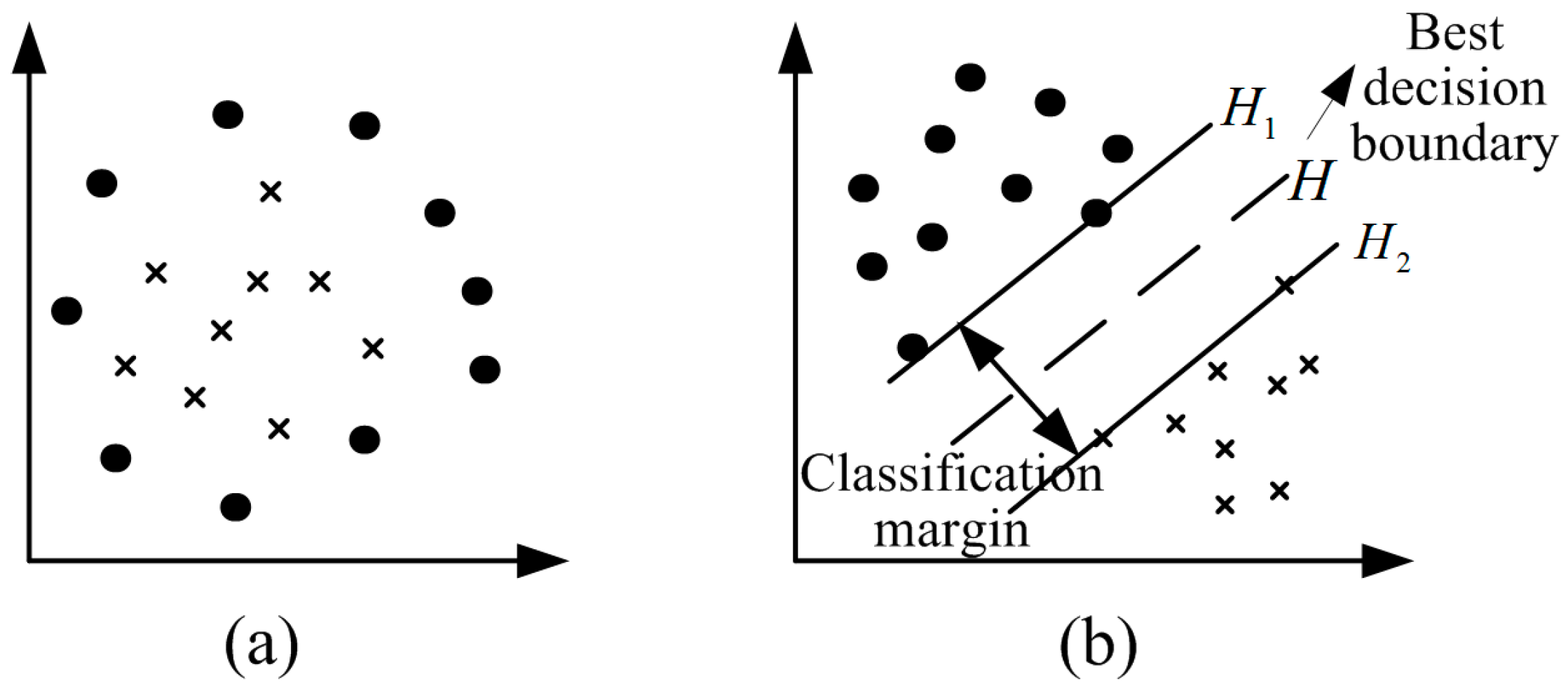
3.1. Principle of Support Vector Machine
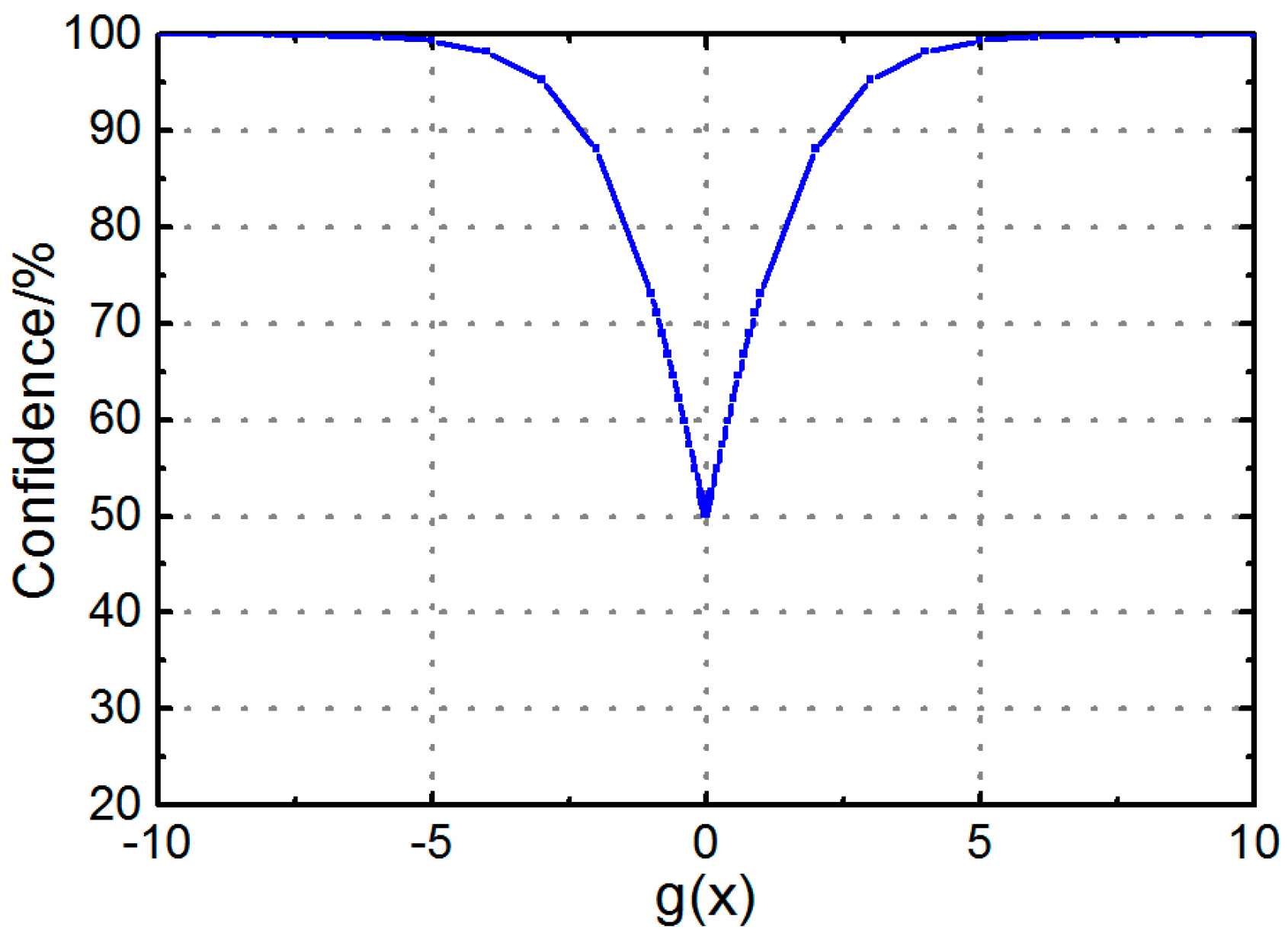
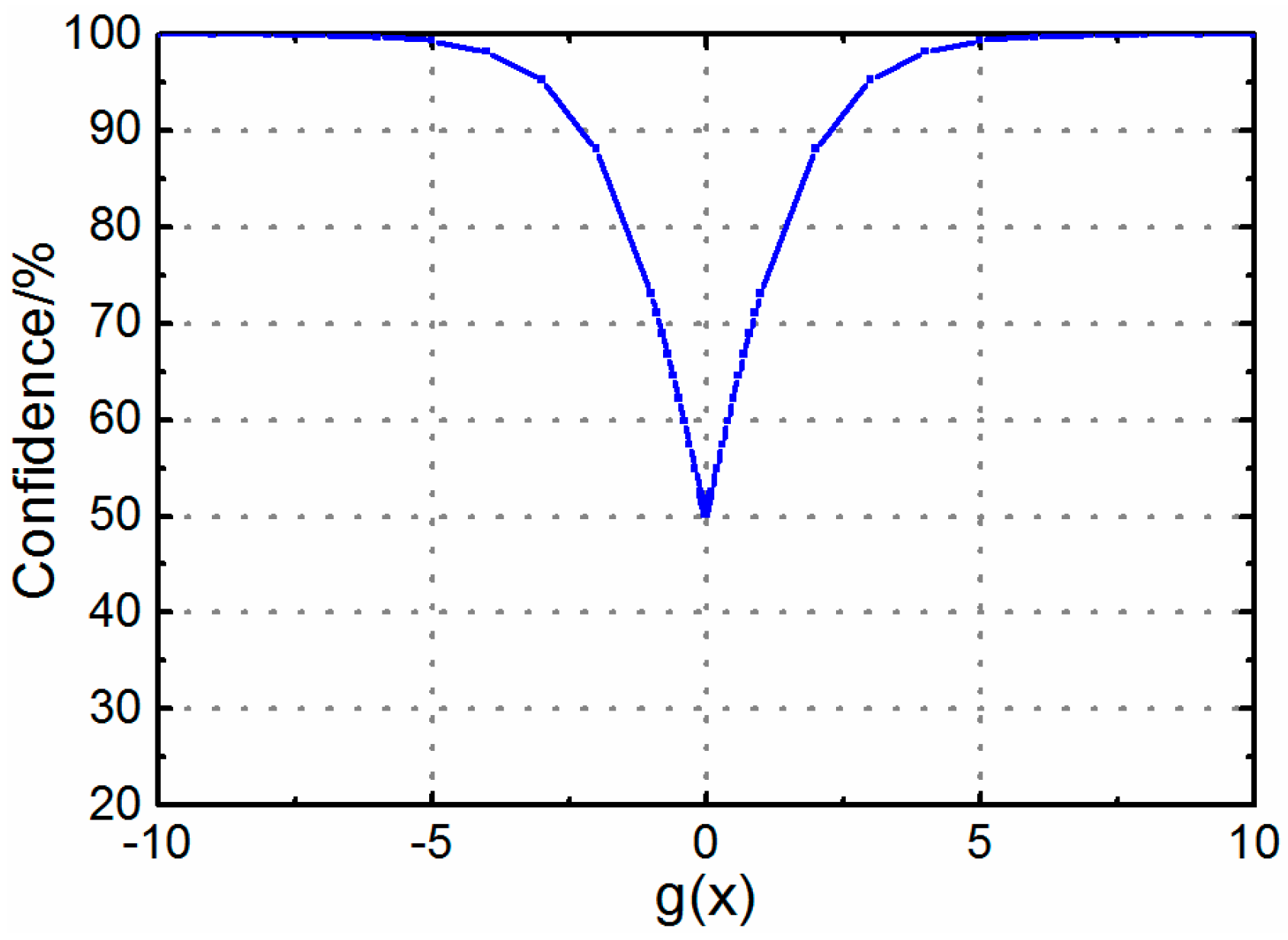
3.2. Confidence Evaluation of Support Vector Machine
3.3. Support Vector Machine-Based Ensemble Classifier
| Algorithm 1: SVM-based Ensemble Classifier | |
| Given the number of SVMs is k and a training dataset D with n instances. | |
| for i = 1 to k do: | |
| |
| end for | |
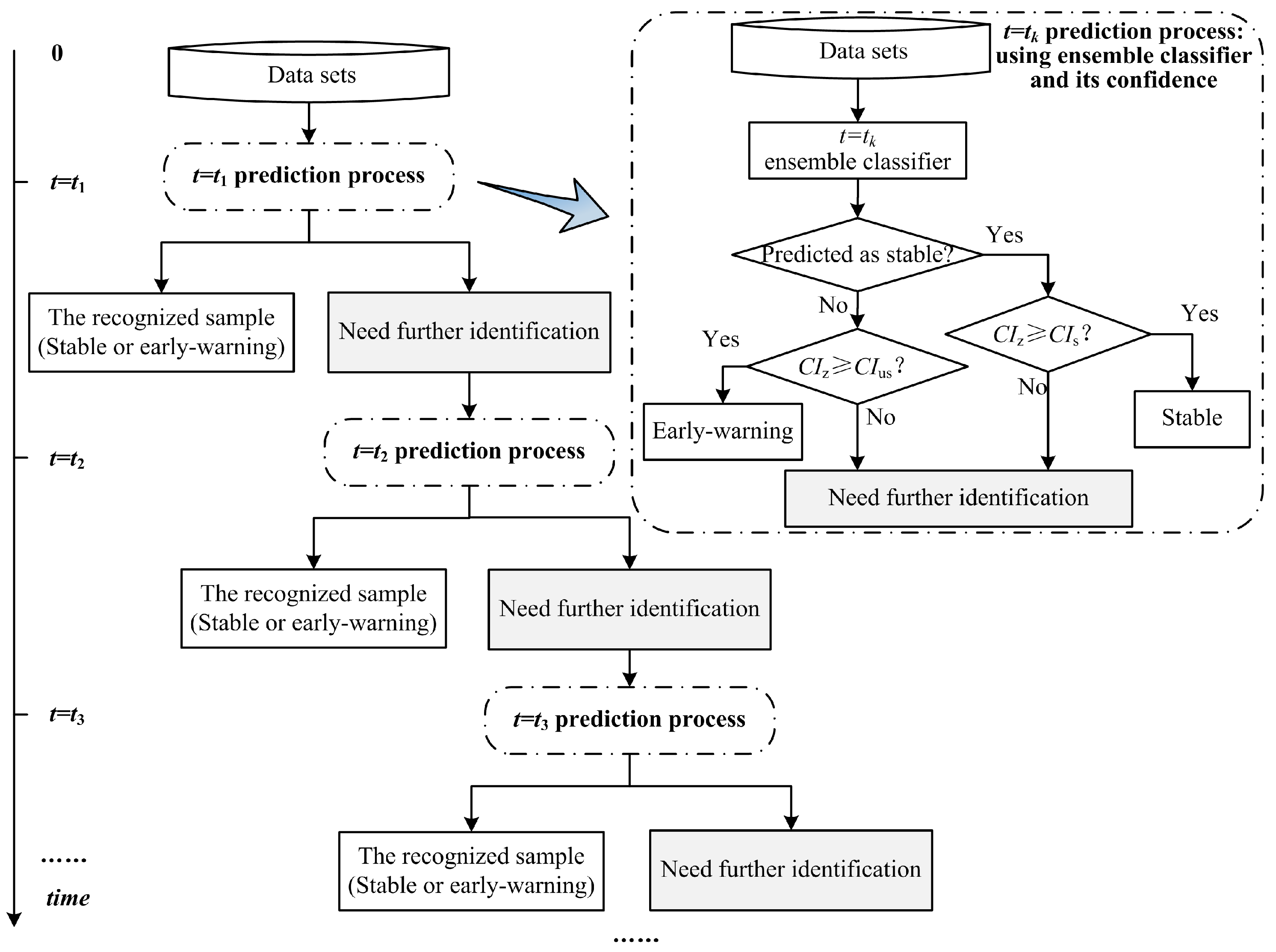
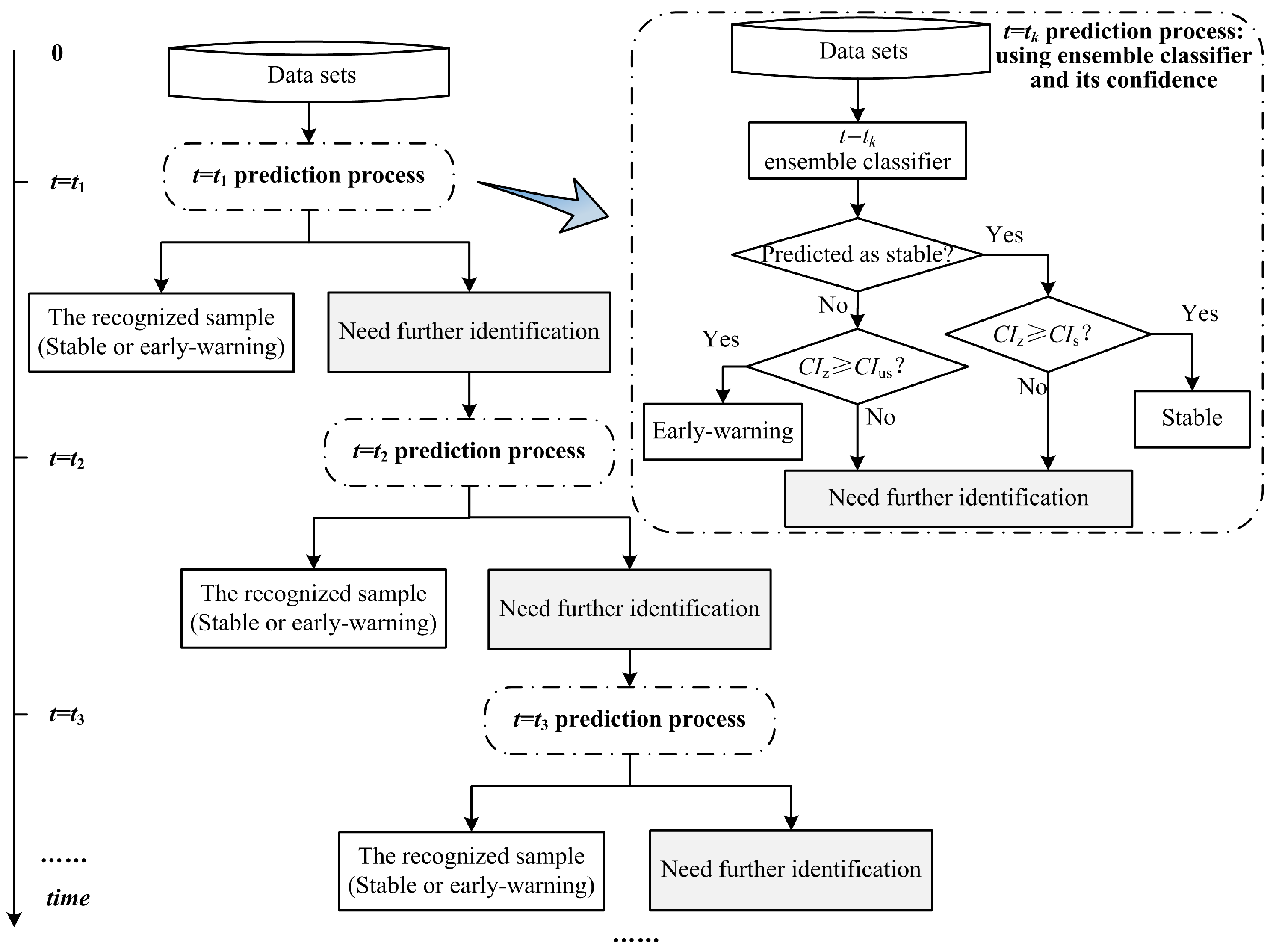
4. Proposed Hierarchical Method for Transient Stability Prediction
5. Results and Discussion
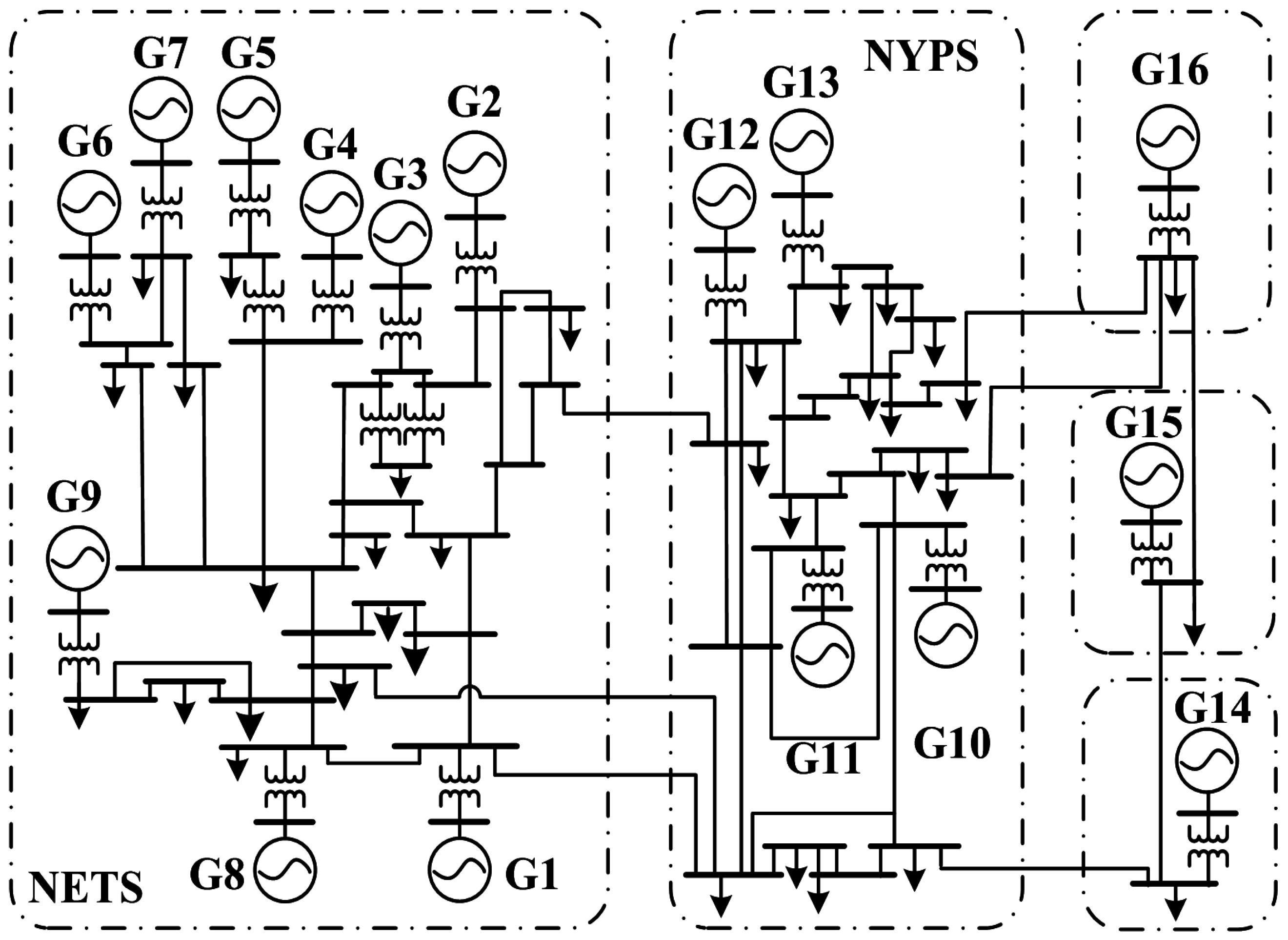
5.1. Data Generation
5.2. Performance Evaluation Method of Transient Stability Classifier
5.2.1. Cross Validation
5.2.2. Indices for Performance Evaluation
- (1)
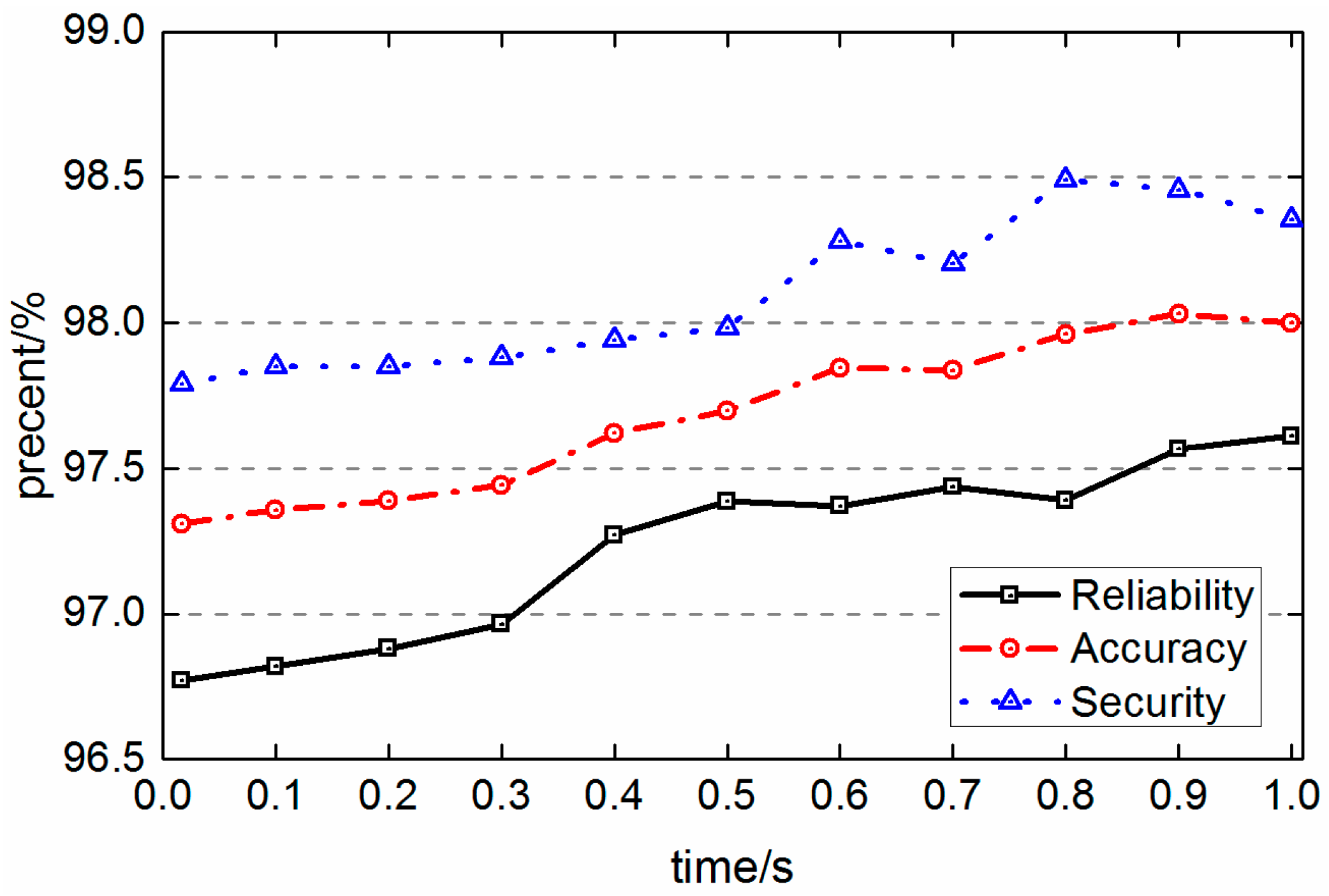
- Accuracy: (Number of instances − Number of misjudged instances)/Number of instances.
- (2)
- Reliability: (Number of unstable instances − Number of unstable instances judged as stable)/Number of unstable instances.
- (3)
- Security: (Number of stable instances − Number of stable instances judged as unstable)/Number of stable instances.
5.3. Simulation Results
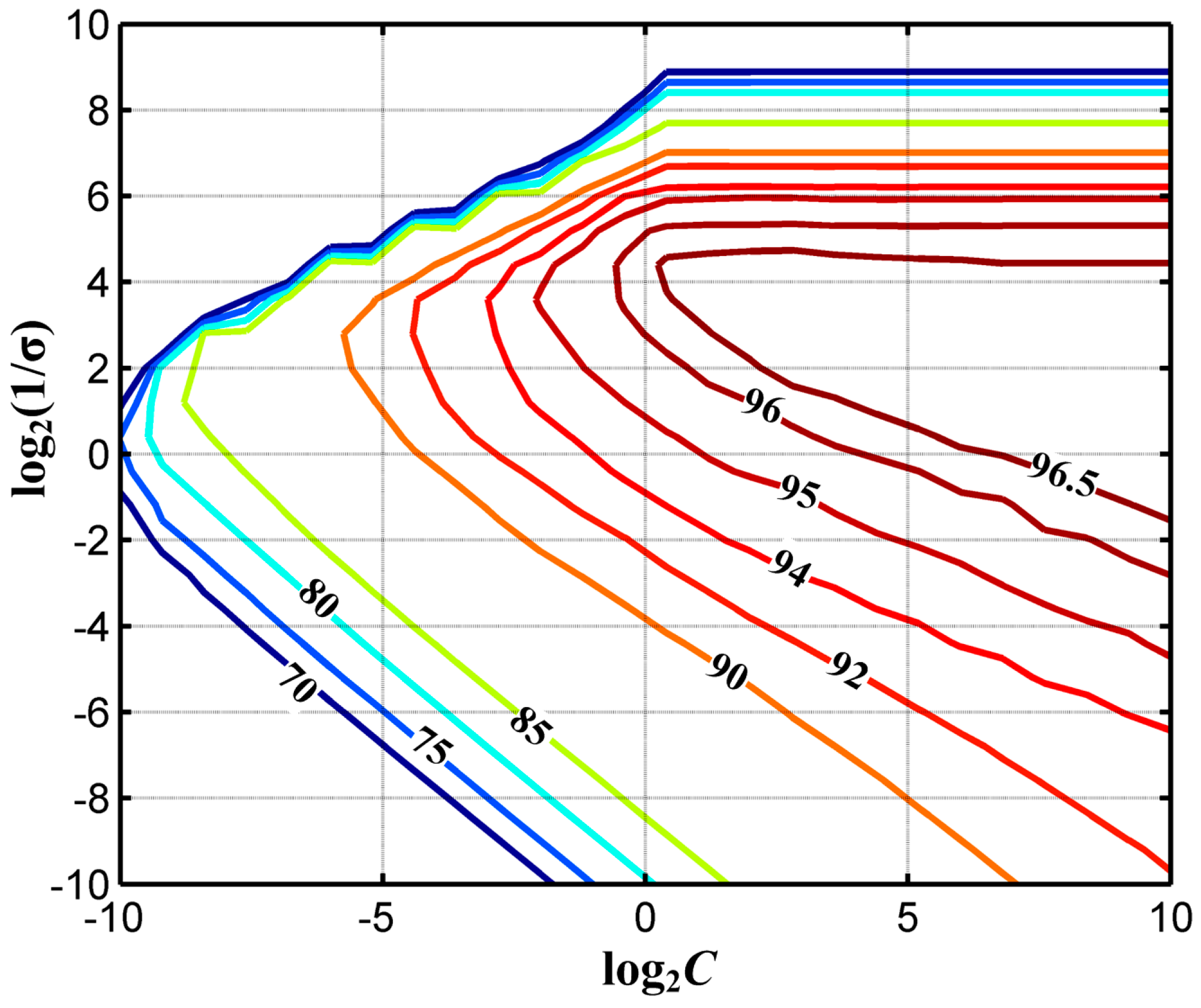
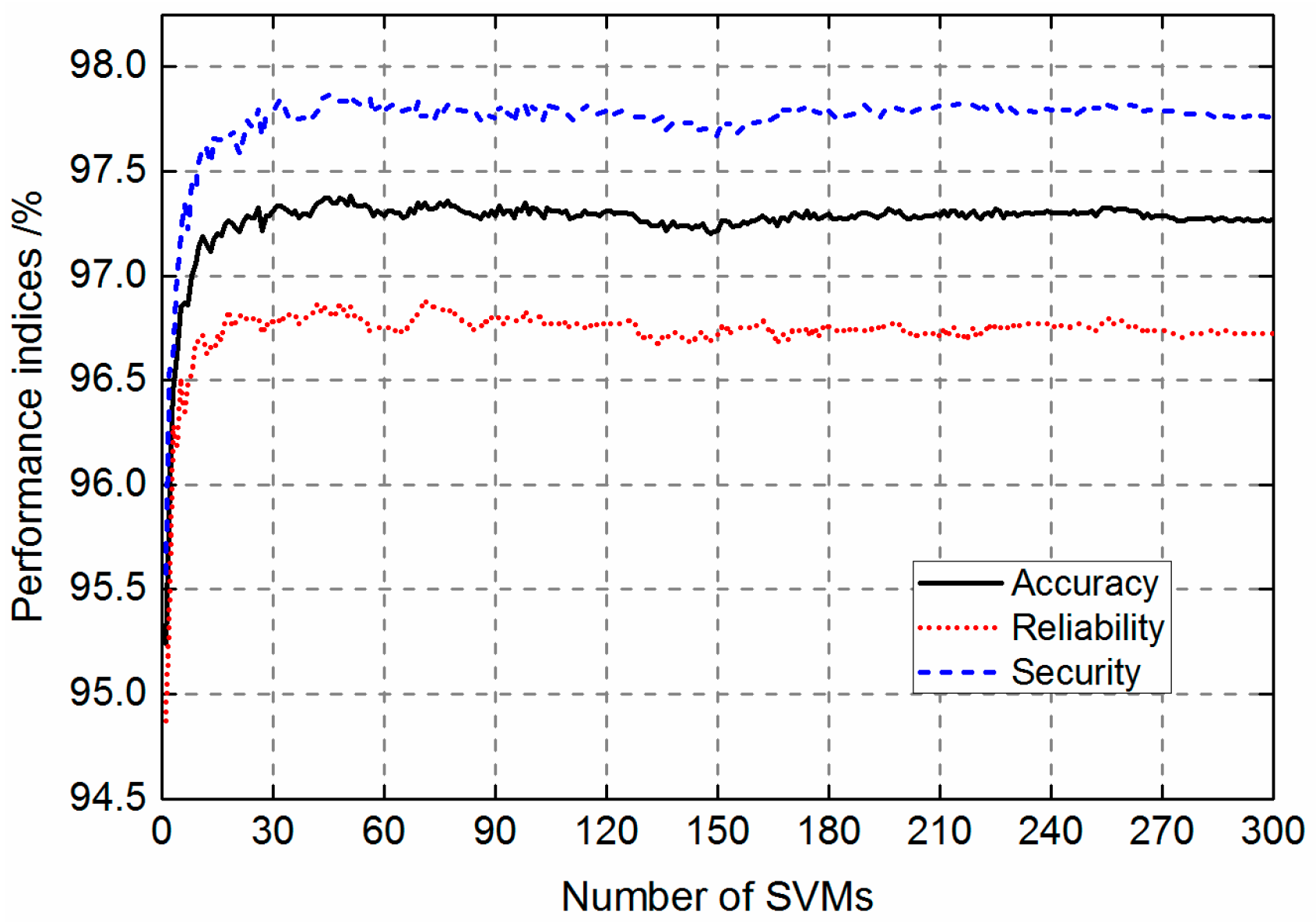
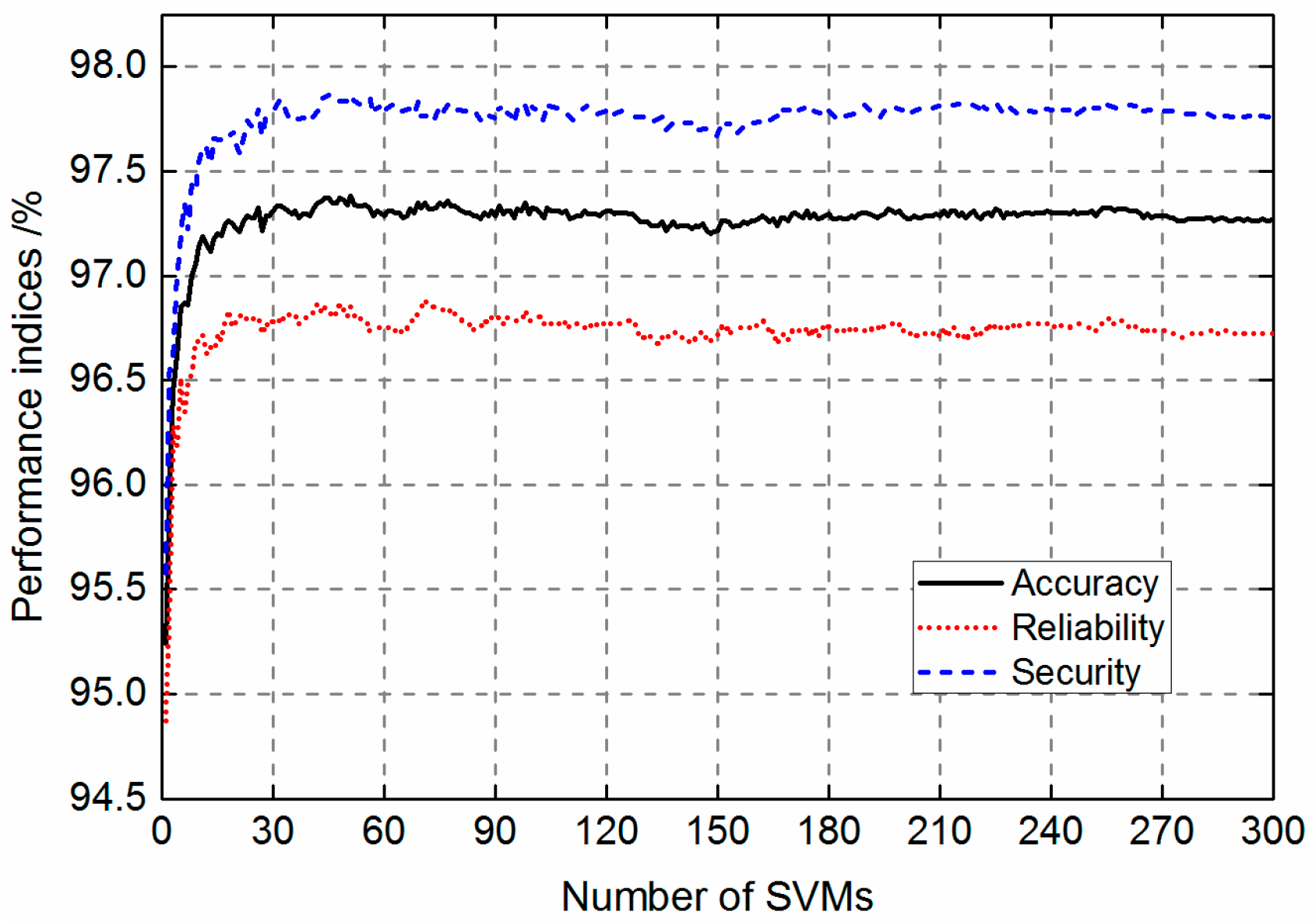
5.3.1. Parameter Determination
5.3.2. Performance Evaluation
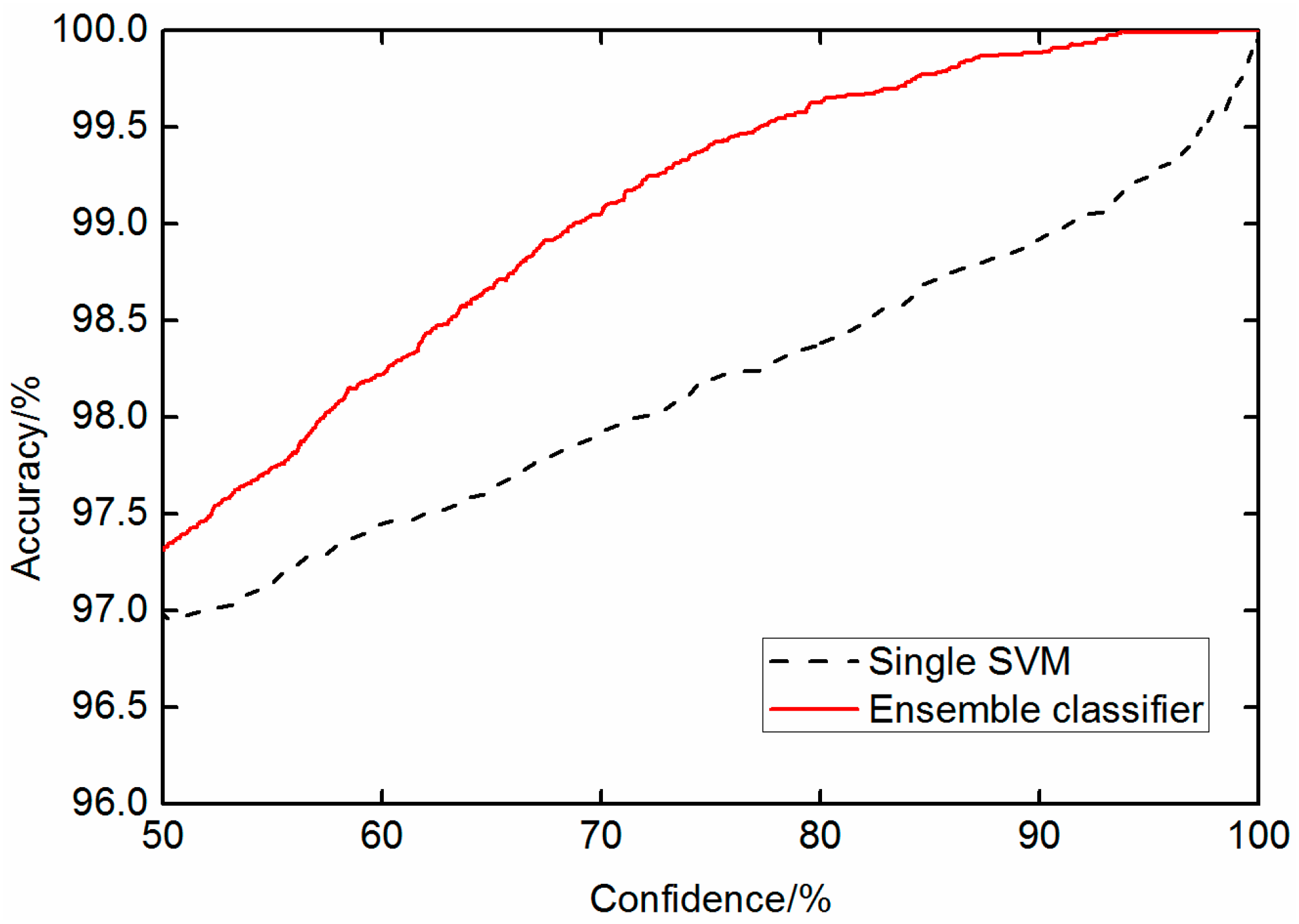
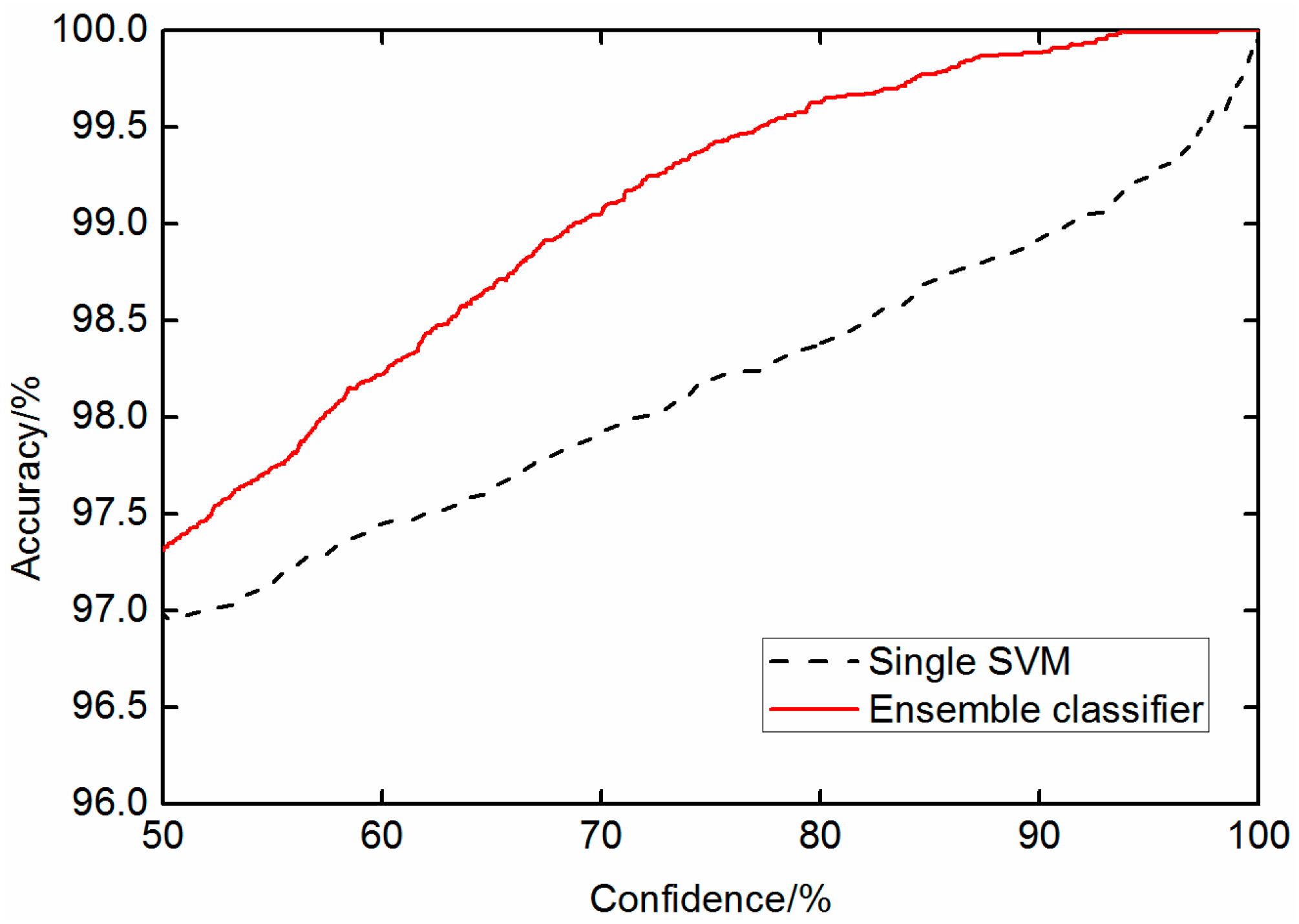
5.3.3. Confidence Evaluation
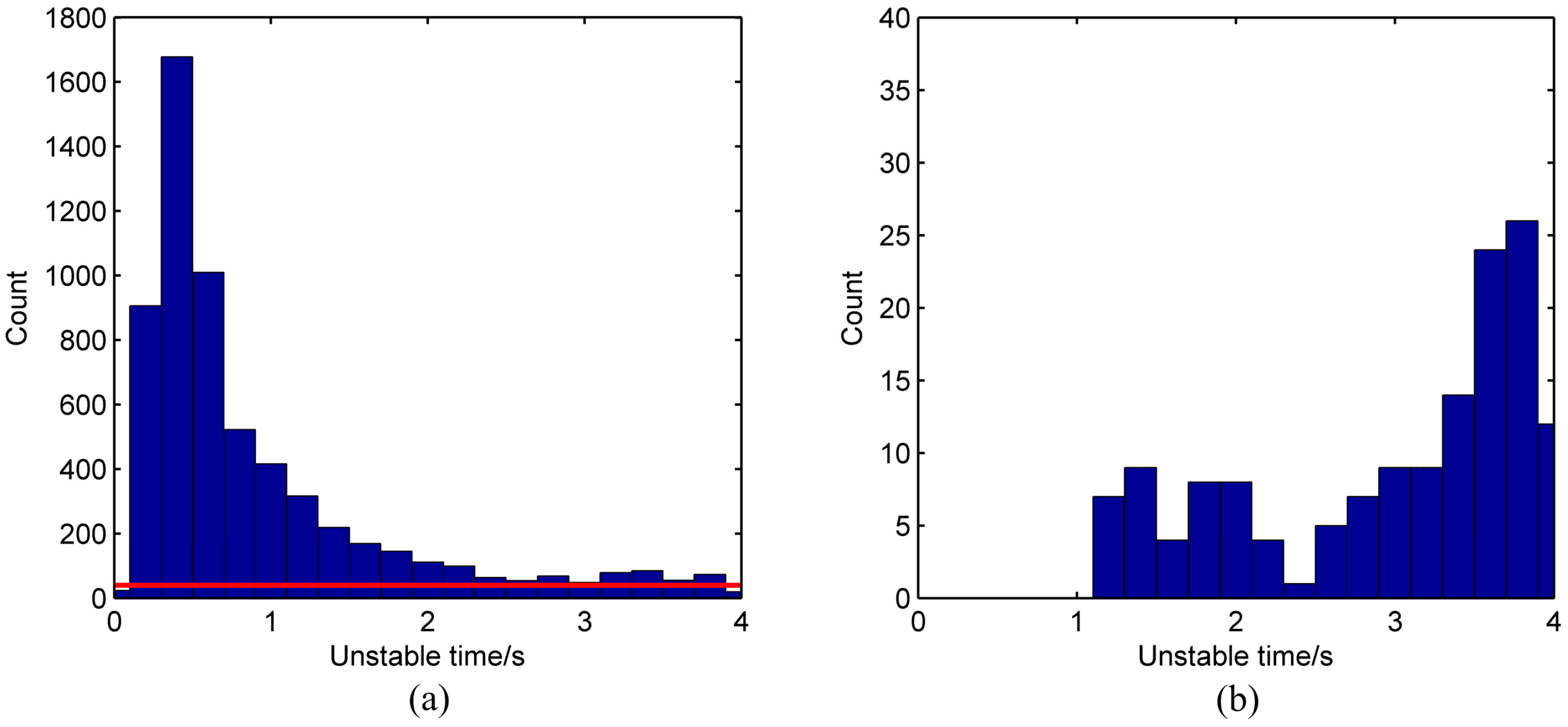
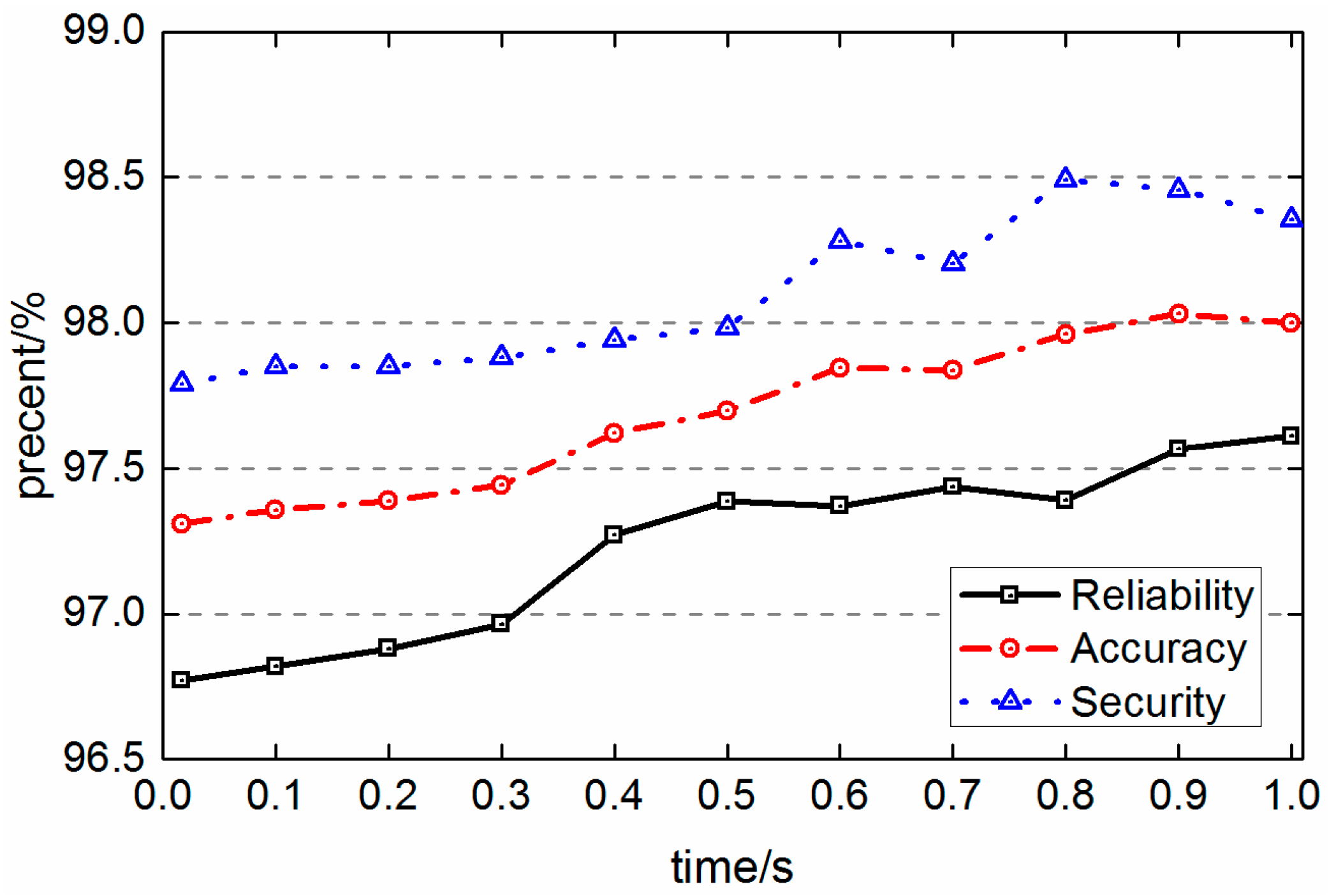
5.3.4. Hierarchical Method for Transient Stability Prediction
5.4. Discussion
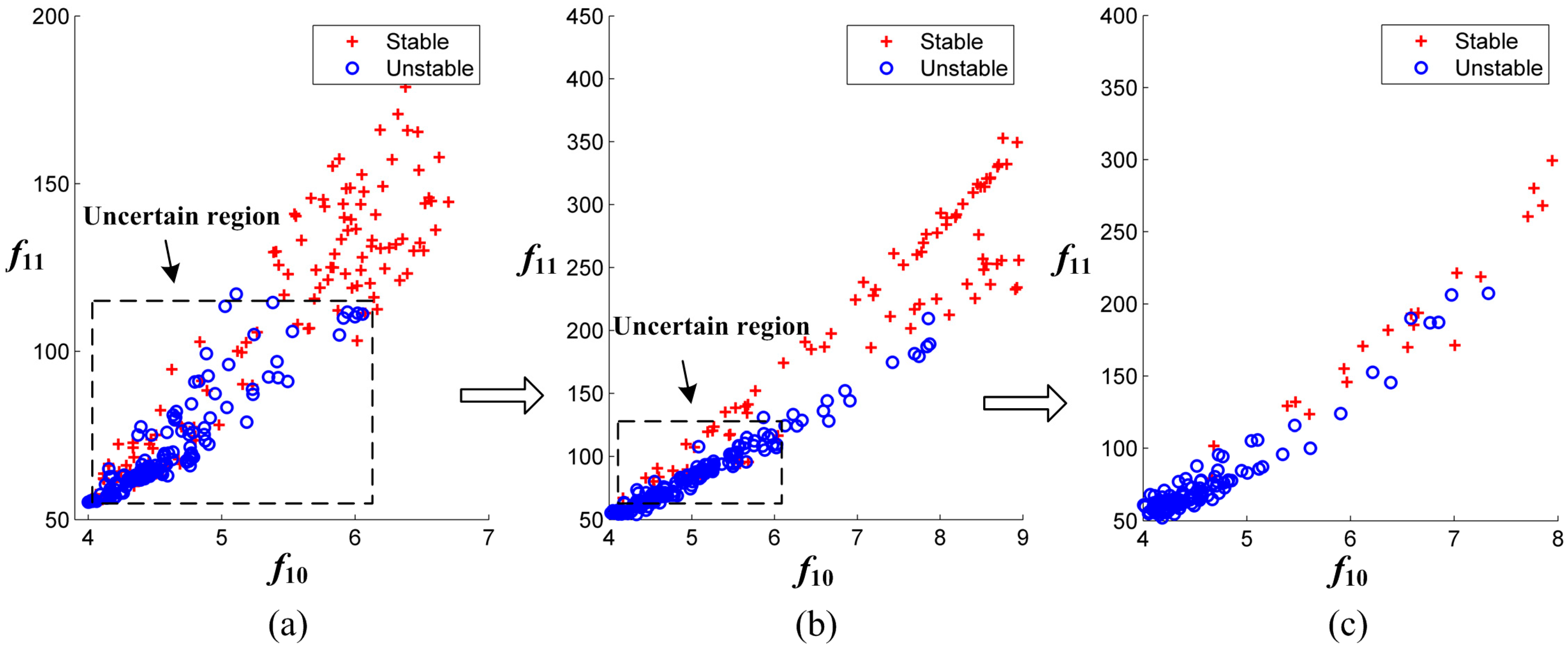
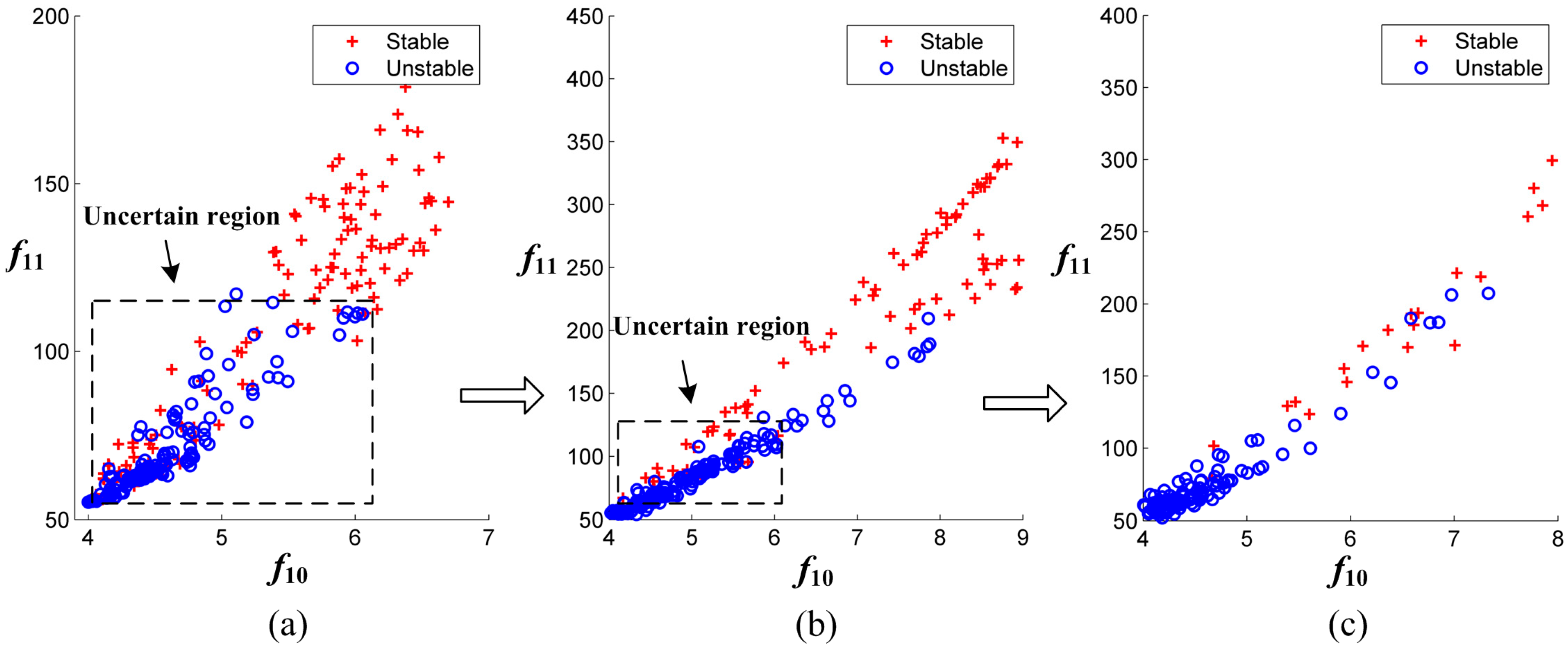
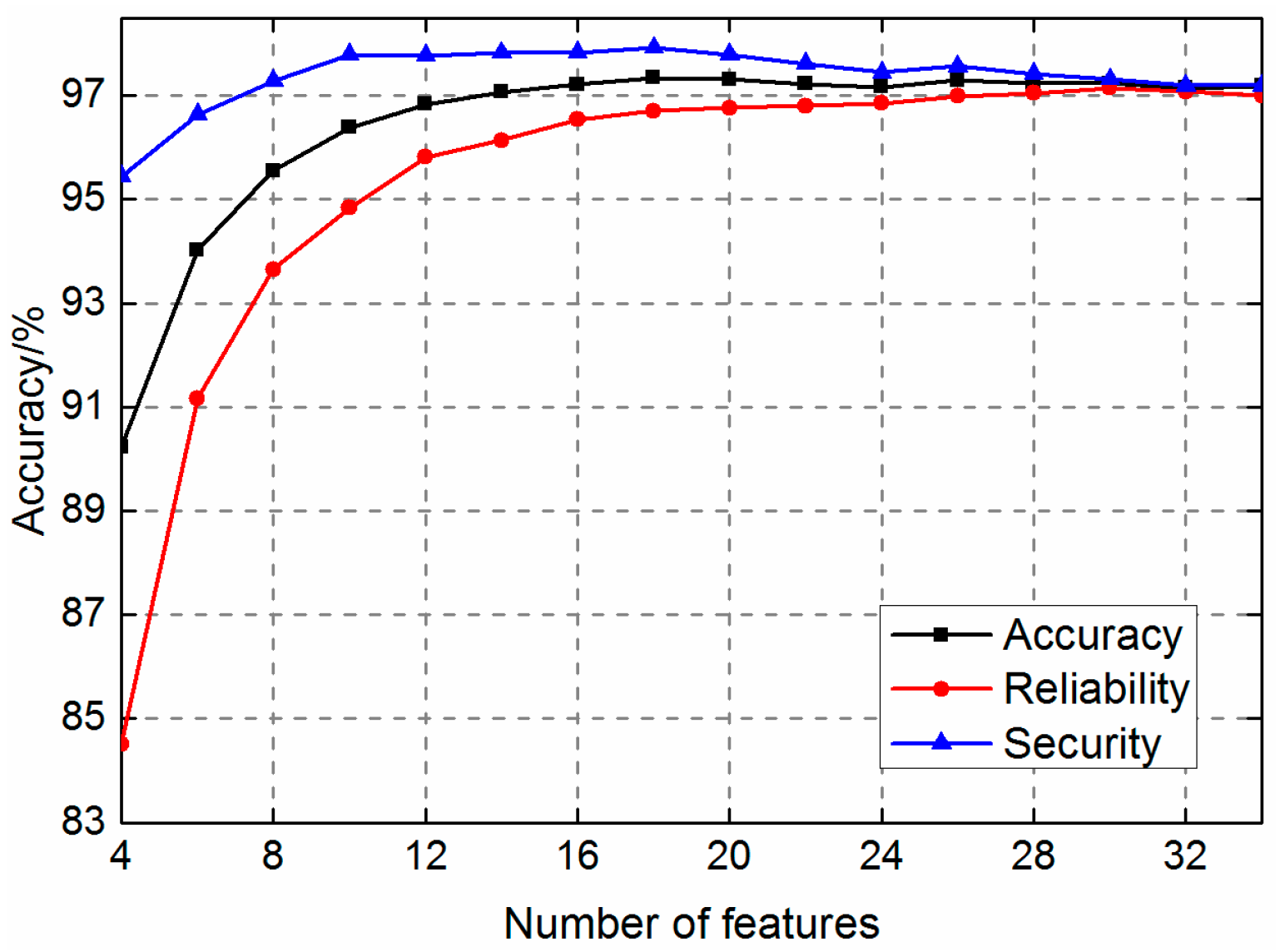
5.4.1. The Construction and Selection of Input Features
5.4.2. The Communication Delay and Computation Time
5.4.3. The Instance Selection Problems
5.4.4. The Role of Machine Learning-Based Method
6. Conclusions
- (1)
- The proposed SVM-based ensemble classifier can provide more accurate prediction results; most importantly, the confidence index proposed in this paper can indicate the credibility of the prediction results, and the SVM-based ensemble classifier possesses a higher confidence level.
- (2)
- The proposed hierarchical method can balance the accuracy and speed of the transient stability prediction. It can provide accurate results of those instances far away from the stable boundary immediately after the fault is cleared. By identification of successive layers with longer response times, more and more uncertain instances are identified with high credibility. The hierarchical method can reduce the misjudgments of unstable instances as much as possible and cooperate with the time domain simulation to insure the security and stability of power systems.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kundur, P.; Paserba, J.; Ajjarapu, V.; Andersson, G.; Bose, A.; Canizares, C.; Hatziargyriou, N.; Hill, D.; Stankovic, A.; Taylor, C.; et al. Definition and classification of power system stability. IEEE Trans. Power Syst. 2004, 19, 1387–1401. [Google Scholar]
- Xu, Y.; Dong, Z.Y.; Zhao, J.H.; Zhang, P.; Wong, K.P. A reliable intelligent system for real-time dynamic security assessment of power systems. IEEE Trans. Power Syst. 2012, 27, 1253–1263. [Google Scholar] [CrossRef]
- Xu, Y.; Dong, Z.Y.; Guan, L.; Dong, Z.Y. Preventive dynamic security control of power systems based on pattern discovery technique. IEEE Trans. Power Syst. 2012, 27, 1236–1244. [Google Scholar] [CrossRef]
- Liu, C.X.; Sun, K.; Rather, Z.H.; Chen, Z.; Bak, C.L.; Thøgersen, P.; Lund, P. A systematic approach for dynamic security assessment and the corresponding preventive control scheme based on decision trees. IEEE Trans. Power Syst. 2014, 29, 717–730. [Google Scholar] [CrossRef]
- Luo, F.; Dong, Z.Y.; Chen, G.; Xu, Y.; Meng, K.; Chen, Y.Y.; Wong, K. Advance pattern discovery-based fuzzy classification method for power system dynamic security assessment. IEEE Trans. Power Syst. 2015, 11, 416–426. [Google Scholar]
- Liu, C.W.; Su, M.C.; Tsay, S.S.; Wang, Y.J. Application of a novel fuzzy neural network to real-time transient stability swings prediction based on synchronized phasor measurements. IEEE Trans. Power Syst. 1999, 14, 685–692. [Google Scholar]
- Sawhney, H.; Jeyasurya, B. A feed-forward artificial neural network with enhanced feature selection for power system transient stability assessment. Electr. Power Syst. Res. 2006, 76, 1047–1054. [Google Scholar] [CrossRef]
- Amjady, N.; Mahedi, S.F. Transient stability prediction by a hybrid intelligent system. IEEE Trans. Power Syst. 2007, 22, 1275–1283. [Google Scholar] [CrossRef]
- Guo, T.Y.; Milanović, J.V. Probabilistic framework for assessing the accuracy of data mining tool for online prediction of transient stability. IEEE Trans. Power Syst. 2014, 29, 377–384. [Google Scholar] [CrossRef]
- Amraee, T.; Ranjbar, S. Transient instability prediction using decision tree technique. IEEE Trans. Power Syst. 2013, 28, 3028–3037. [Google Scholar] [CrossRef]
- Li, M.Y.; Pal, A.; Phadke, A.G.; Thorp, J.S. Transient stability prediction based on apparent impedance trajectory recorded by PMUs. Int. J. Electr. Power Energy Syst. 2014, 54, 498–504. [Google Scholar] [CrossRef]
- Rajapakse, A.D.; Gomez, F.R.; Nanayakkara, K.; Crossley, P.A.; Terzija, V.V. Rotor angle instability prediction using post-disturbance voltage trajectories. IEEE Trans. Power Syst. 2010, 25, 947–956. [Google Scholar] [CrossRef]
- Gomez, F.R.; Rajapakse, A.D.; Annakkage, U.D.; Fernando, I.T. Support vector machine-based algorithm for post-fault transient stability status prediction using synchronized measurements. IEEE Trans. Power Syst. 2011, 26, 1474–1483. [Google Scholar] [CrossRef]
- You, D.; Wang, K.; Ye, L.; Wu, J.; Huang, R. Transient stability assessment of power system using support vector machine with generator combinatorial trajectories inputs. Int. J. Electr. Power Energy Syst. 2013, 44, 318–325. [Google Scholar] [CrossRef]
- Geeganage, J.; Annakkage, U.D.; Weekes, T.; Archer, B.A. Application of energy-based power system features for dynamic security assessment. IEEE Trans. Power Syst. 2015, 30, 1957–1965. [Google Scholar] [CrossRef]
- Abdelaziz, A.Y.; Abbas, A.A.; Naiem, A.F.; Elsharkawy, M.A. Transient stability assessment using an adaptive fuzzy classification technique. Electr. Power Compon. Syst. 2006, 34, 927–940. [Google Scholar] [CrossRef]
- Kamwa, I.; Samantaray, S.R.; Joós, G. Development of rule-based classifiers for rapid stability assessment of wide-area post-disturbance records. IEEE Trans. Power Syst. 2009, 24, 258–270. [Google Scholar] [CrossRef]
- Dora Arul Selvi, B.; Kamaraj, N. Transient stability assessment using fuzzy combined support vector machines. Electr. Power Compon. Syst. 2010, 38, 737–751. [Google Scholar] [CrossRef]
- Guo, T.Y.; Milanović, J.V. Online identification of power system dynamic signature using PMU measurements and data mining. IEEE Trans. Power Syst. 2016, 31, 1760–1768. [Google Scholar] [CrossRef]
- Fang, D.Z.; David, A.K. A normalized energy function for fast transient stability assessment. Electr. Power Syst. Res. 2004, 69, 287–293. [Google Scholar] [CrossRef]
- Cherkassky, V.S.; Mulier, F. Learning from Data: Concepts Theory and Method, 2nd ed.; IEEE Press: Hoboken, NJ, USA, 2007. [Google Scholar]
- Hartman, E.J.; Keller, J.D.; Kowalski, J.M. Layered neural networks with Gaussian hidden units as universal approximations. Neural Comput. 1990, 2, 210–215. [Google Scholar] [CrossRef]
- Platt, J.C. Probabilistic output for support vector machine and comparisons to regularized likelihood methods. In Advances in Large Margin Classifiers; MIT Press: Cambridge, MA, USA, 1999; pp. 61–74. [Google Scholar]
- Han, J.; Kamber, M.; Pei, J. Data Ming: Concept and Techniques, 3rd ed.; Elsevier: Amsterdam, The Netherlands, 2012; pp. 363–385. [Google Scholar]
- Rogers, G. Power System Oscillations; Kluwer: Norwell, MA, USA, 2000; pp. 171–185. [Google Scholar]
- Chow, J.H.; Cheung, K.W. A toolbox for power system dynamics and control engineering education and research. IEEE Trans. Power Syst. 1992, 7, 1559–1564. [Google Scholar] [CrossRef]
- Kamwa, I.; Samantaray, S.R.; Joós, G. On the accuracy versus transparency trade-off of data-mining models for fast-response PMU-based catastrophe predictors. IEEE Trans. Smart Grid. 2012, 3, 152–161. [Google Scholar] [CrossRef]
- Chang, C.C.; Lin, C.J. Libsvm: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Naduvathuparambil, B.; Valenti, M.C.; Feliachi, A. Communication delays in wide area measurement systems. In Proceedings of the Thirty-Fourth Southeastern Symposium on System Theory, Huntsville, AL, USA, 18–19 March 2002; pp. 118–122.
- Guo, T.; Milanović, J.V. The effect of quality and availability of measurement signals on accuracy of on-line prediction of transient stability using decision tree method. In Proceedings of 2013 4th IEEE/PES Innovative Smart Grid Technologies Europe (ISGT Europe), Copenhagen, Denmark, 6–9 October 2013.
- He, M.; Vittal, V.; Zhang, J.S. Online dynamic security assessment with missing PMU Measurements: A data mining approach. IEEE Trans. Power Syst. 2013, 28, 1969–1977. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, C.; Xue, X.; Liu, C.L. Fast instance selection for speeding up support vector machines. Knowl.-Based Syst. 2013, 45, 1–7. [Google Scholar] [CrossRef]
- Jiang, Q.Y.; Jiang, H. OpenMP-based parallel transient stability simulation for large-scale power systems. Sci. China Technol. Sci. 2012, 55, 2837–2846. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Description | Feature | Description |
|---|---|---|---|
| f1 | Average{Pmi(tb)} | f18 | Max{ῶi(tk)} + Min{ῶi(tk)} |
| f2 | Average{Pei(tFOT)/Pmi(tFOT)} | f19 | Coefficient of variation{ῶi(tk)} |
| f3 | Max{Pei(tFOT)/Pmi(tFOT)} | f20 | αCOI(tk) |
| f4 | Min{Pei(tFOT)/Pmi(tFOT)} | f21 | Average{|ᾶi(tk)|} |
| f5 | Average{Pei(tk)/Pmi(tk)} | f22 | Variance{ᾶi(tk)} |
| f6 | Max{Pei(tk)/Pmi(tk)} | f23 | Max{ᾶi(tk)} − Min{ᾶi(tk)} |
| f7 | Min{Pei(tk)/Pmi(tk)} | f24 | Max{ᾶi(tk)} + Min{ᾶi(tk)} |
| f8 | δCOI(tk) | f25 | Coefficient of variation{ᾶi(tk)} |
| f9 | Average{|(tk)|} | f26 | Average{EKi(tk)} |
| f10 | Variance{(tk)} | f27 | Variance(EKi(tk)) |
| f11 | Max{(tk)} − Min{(tk)} | f28 | Max{EKi(tk)} − Min{EKi(tk)} |
| f12 | Max{(tk)} + Min{(tk)} | f29 | Max{EKi(tk)} + Min{EKi(tk)} |
| f13 | Coefficient of variation{(tk)} | f30 | Coefficient of variation{EKi(tk)} |
| f14 | ωCOI(tk) | f31 | Max{dEKi/dt} − Min{dEKi/dt}|t = tk |
| f15 | Average{|ῶi(tk)|} | f32 | v(tk) |
| f16 | Variance{ῶi(tk)} | f33 | δGL(tk) − δGB(tk) |
| f17 | Max{ῶi(tk)} − Min{ῶi(tk)} | f34 | ωGL(tk) − ωGB(tk) |
| Classifier | Accuracy (%) | Reliability (%) | Security (%) |
|---|---|---|---|
| C5.0 DT | 95.02 | 94.90 | 95.13 |
| ELM | 95.23 | 93.51 | 96.81 |
| Boosting C5.0 | 96.76 | 95.97 | 97.48 |
| RF | 96.94 | 96.25 | 96.25 |
| Single SVM | 96.94 | 96.72 | 97.14 |
| Proposed Method | 97.31 | 96.77 | 97.79 |
| Response Time | Classified as Stable | Classified as Unstable | Uncertain Instances | ||
|---|---|---|---|---|---|
| Total | Misdetection | Total | False-Alarm | ||
| t1 = 0.0167 s | 3821 | 0 | 5973 | 92 | 3106 |
| t2 = 0.2 s | 685 | 0 | 105 | 25 | 2316 |
| t3 = 0.4 s | 287 | 0 | 44 | 14 | 1985 |
| t4 = 0.6 s | 170 | 0 | 30 | 7 | 1785 |
| … | … | ... | ... | … | … |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Wu, J.; Yu, Z.; Ji, L.; Hao, L. A Hierarchical Method for Transient Stability Prediction of Power Systems Using the Confidence of a SVM-Based Ensemble Classifier. Energies 2016, 9, 778. https://doi.org/10.3390/en9100778
Zhou Y, Wu J, Yu Z, Ji L, Hao L. A Hierarchical Method for Transient Stability Prediction of Power Systems Using the Confidence of a SVM-Based Ensemble Classifier. Energies. 2016; 9(10):778. https://doi.org/10.3390/en9100778
Chicago/Turabian StyleZhou, Yanzhen, Junyong Wu, Zhihong Yu, Luyu Ji, and Liangliang Hao. 2016. "A Hierarchical Method for Transient Stability Prediction of Power Systems Using the Confidence of a SVM-Based Ensemble Classifier" Energies 9, no. 10: 778. https://doi.org/10.3390/en9100778