1. Introduction
The energy needs and quality requirements of our society have been increasing in the last few decades. These improvements follow the lead of the new Smart Grid (SG) tendencies [
1,
2,
3,
4]. Moreover, the improvement of the quality of service is one of their main priorities [
5,
6]. Thus, an essential characteristic of a SG network is its strong Distributed Generation (DG) [
7] and Distributed Energy Storage (DES) [
8] presence, which together with Demand-Side Management (DSM) [
9,
10] systems make up microgrids [
11] and provide improvements in the network reliability [
12]. However, this presence shifts the traditional philosophy of Transmission and Distribution (T&D) systems, adding bidirectional energy flows along them. Unfortunately, as will be seen below, these changes in the flow directions are a significant constraint on network fault analysis, requiring complex systems to guarantee a proper operation in these environments.
In this sense, this SG network seeks the Self-Healing [
13] concept where Fault Detection, Isolation and Restoration (FDIR) [
14] philosophy is applied by the Outage Management System (OMS) to improve the network operation, automatically solving or mitigating the fault consequences. Specifically, a self-healing grid is a system which detects and isolates faults and reconfigures the distribution network, reducing the impact of an electrical fault and improving the resiliency of the network. Self-healing is not a new concept. For decades, electric utilities have been implementing automatic reclosers to restore the power supply without human intervention. However, current electric distribution utilities are big and complex systems and commonly operate in a high load factor. In this scenario, self-healing systems need to be more intelligent, acting in real-time to locate the fault and to efficiently reconfigure the topology on SG networks.
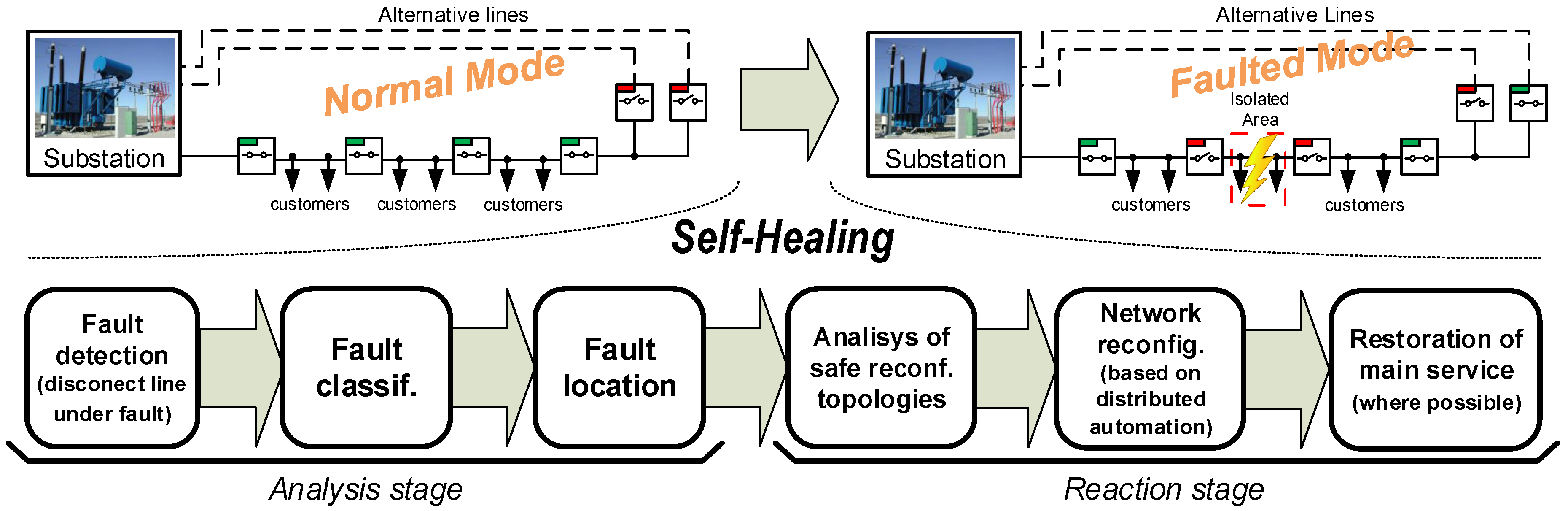
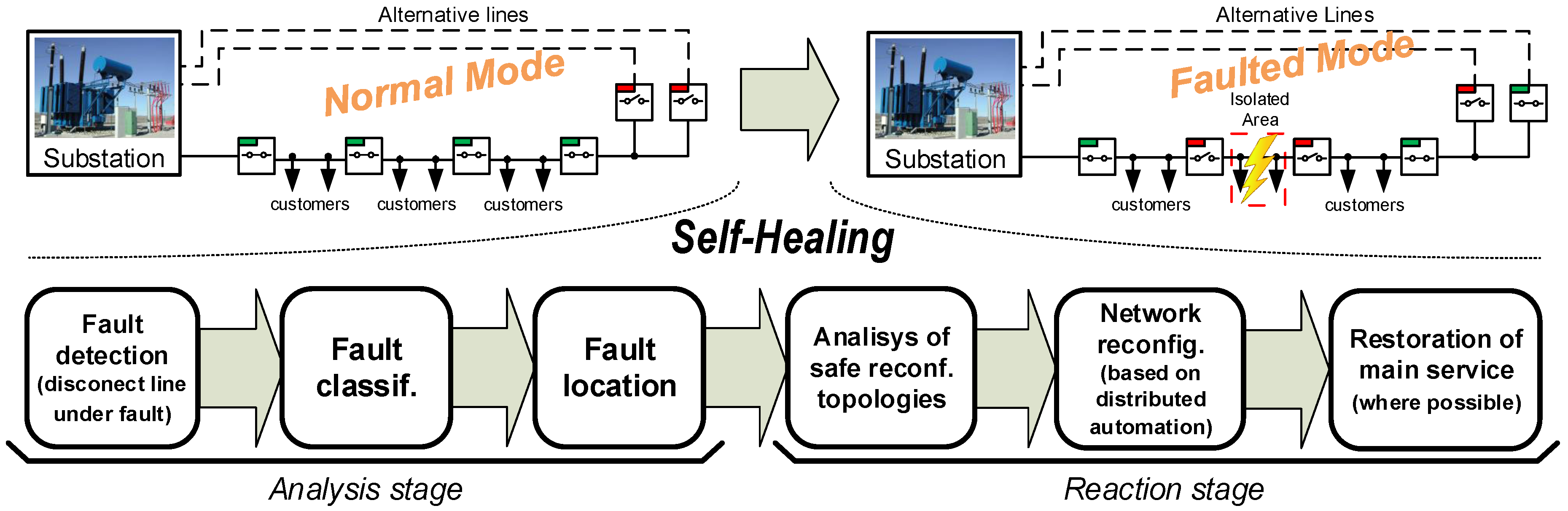
Thus, as can be seen in
Figure 1, when a fault happens in a self-healing power network, it is easy to distinguish two main stages.
Firstly, the analysis stage is executed. In this stage, the OMS protects the feeder and characterizes the fault (type, position, etc.). Immediately after, in the reaction stage, the OMS reconfigures the affected network, according to the results obtained from the analysis stage, and restores the supply to as many customers as possible. On the one hand, time spent on this second stage (associated with isolation and restoration procedures) directly depends on the automation level of each network. An example of this fact is presented in [
15], where the need of a holistic Distribution Automation (DA) integration is discussed. Additionally, a novel approach that integrates protection, control, and monitoring based on DA is also proposed. On the other hand, the analysis stage requires different studies, and it is typically divided into four steps: detection, classification, and location analyses.
Obviously, the first step (fault detection) should be fast. It is typically associated with Digital Protective Relays (DPRs), which measure voltage and current and quickly disconnect the line under fault conditions. They are typically based on sequential components [
16] and impedance [
17] analysis. Additionally, other methods use spectral analyses such as Fast Fourier Transform (FFT) [
18] or Discrete Wavelet Transform (DWT) [
19].
The purpose of the second step is to extract features and to classify faults using the information captured by DPRs or Digital Fault Recorders (DFRs). Traditionally, these techniques apply direct analysis over symmetrical components [
20] or use spectral analysis (such as FFT [
18] or DWT [
21]) to extract the fault features. These studies are commonly supported by computational intelligence, such as Artificial Neural Networks (ANNs) [
22], Fuzzy Logic (FL) [
23], Decision Trees (DTs) [
24] or Support Vector Machines (SVMs) [
25].
Finally, the fault location (third step) is responsible for finding the position where the fault occurs. Obviously, a good estimation of this position is essential for the next stages (e.g., isolate the fault). As a proof of its importance, we found the recently reedited IEEE C37.114 standard [
26], where the most relevant techniques are summarized. However, as will be seen below, these techniques are quite conditioned by the network topology [
27,
28] and especially by the presence of DG.
Thus, as was described above, fault location is an essential issue in SG systems. However, this concept has been widely used in transmission networks. Conversely, in distribution networks, they are less common because typically, this network level has complex topologies and limitations in its instrumentation. Fortunately, in the last few years, this tendency is changing. Following the SG philosophy and supported by Information and Communication Technologies (ICT), the fault location analysis is being extended to distribution networks [
29]. Besides, the use of underground lines is more common everyday in urban areas, which poses new challenges to apply some location methods.
In this sense, a review of several location methods for distribution networks has been done in this paper. As can be seen below, this work is focused on impedance-based methods because they are more applicable on distribution networks (due to it having less instrumentation requirements). This study compares several location methods highlighting their problems and dependencies, mainly associated with underground scenarios (increasingly common in modern networks, especially in urban environments). Moreover, the main advantage provided in this paper is the use of a standard network as a testbed (unusual in individual studies), allowing us to truly compare coherently amongst these analyzed methods, and providing the ability to compare with other proposals in future work.
Therefore, this paper is divided as follows;
Section 2 shows a brief overview of traditional fault location methods. Following this review,
Section 3 is focused on the impedance-based fault location methods, analyzing their two main approaches, and describing some relevant examples of them.
Section 4 describes the testbed characteristics and poses the simulation set for it. A comparative analysis of the studied methods and its dependency on the parameter variations in the simulated cases is shown in
Section 5. Finally, conclusions are shown in
Section 6.
2. Fault Location Family Methods Overview
As discussed above, a fast fault location technique is key to improving the OMS. However, theses techniques directly depend on the measurement characteristics. In this sense, they are divided into three families: based on traveling waves; based on high-frequency measurements; and based on phasor measurements.
Traveling Waves (TW) methods are based on the analysis of propagation time associated with fault effects [
30]. This time is measured at one-end (taking advantage of the wave reflections [
31]) or multi-end (analyzing the time differences or the delay between them [
32]). Unfortunately, this family poses complications under complex topologies (with many reflections). Due to this, it requires the combined use of advanced feature extraction techniques (e.g., DWT combined with Multi-Resolution Analysis, MRA [
33]) and classification techniques, the last of them being based on computational intelligence such as Artificial Neural Networks (ANN) [
34,
35] or Support Vector Machines (SVM) [
36] to solve this problem.
High frequency based methods determine the fault position using high frequency information contained within voltage and current measurements. In this sense, it is possible to distinguish two approaches: time domain methods [
37,
38,
39], or frequency domain methods where MRA [
40] is one of their most common tools. Thus, this approach traditionally is also supported by any of the classification techniques, such as ANN [
41], FL [
42], a combination of both, Adaptive-Network-based Fuzzy Inference System (ANFIS) [
43], etc.
Phasor based methods determine the fault position based on the relationship between main harmonic (or phasor) of voltages and currents. It is the most commonly used family in distribution networks because it has the least requirements for their measurements. The most traditional implementations are based on one-end measurements [
44,
45,
46,
47,
48,
49,
50,
51] and are commonly known as apparent impedance methods. These methods only need a voltage and current measurement (typically registered at line header). Conversely, two-end (or multi-end) methods [
52,
53,
54,
55,
56,
57,
58] use measurements at several nodes, analyzing the differences or imbalances between them, and using this information in order to locate the fault.
Searching in the literature, it is easy to find several comparatives of different fault location techniques. As an example, [
59] shows a general overview of the three fault location families cited above. Other works, such as [
60], make comparisons using two representative fault localization methods of different families. Work [
61], very cited in the literature, presents a general comparison of classical fault location techniques, classifying them in function of the requirement of each technique. Another classical comparison is [
62], that makes an exhaustive comparison of ten fault location methods under different fault parameters. This study focuses only on one-end impedance-based, not being therefore compatible with DG scenarios. Conversely, this DG scenario is considered in [
63], comparing methods of different families that combine measurements at different points, highlighting the necessity of synchronization between them to operate consistently. This method has good accuracy. However, it uses techniques that require complex and expensive devices, which may compromise the deployment viability.
As can be seen, most of the previous comparisons or explored techniques are not compatible with DG scenarios, or are based on complex devices not so common in underground distribution networks. Moreover, none of these works use a testbed on an underground network. However, as we show below, in the literature, there exist many localization techniques that can be used in underground networks. Therefore, this is the main motivation of the presented work: analyze fault location techniques to evaluate their performance in underground distribution networks, considering both DG and not DG compatible techniques.
Additionally, distribution networks are more complex and need more equipment than transmission networks to deploy an infrastructure. This fact hinders the use of expensive instrumentation. Due to this, if we analyze the typical infrastructure of distribution networks, it is easy to note that currently, the typical deployed instrumentation of these facilities can only be used to do low-frequency (or phasor) analysis. Due to this, TW and high-frequency based methods are not considered in this work. In this sense, the third of these studied families (phasor based method) has the lower requirements, being the best solution for this network level. This is why the authors have focused their efforts on this family of methods, as we will see in the next section.
Therefore, the present paper proposes a revision of phasor based methods focusing on underground distribution networks. The main advantage of this work is to study the advantage and constrains of different methods under a standard underground testbed, beyond the individual comparisons made by each author based on different specific networks, and which do not allow us to compare their results consistently.
4. Study Case
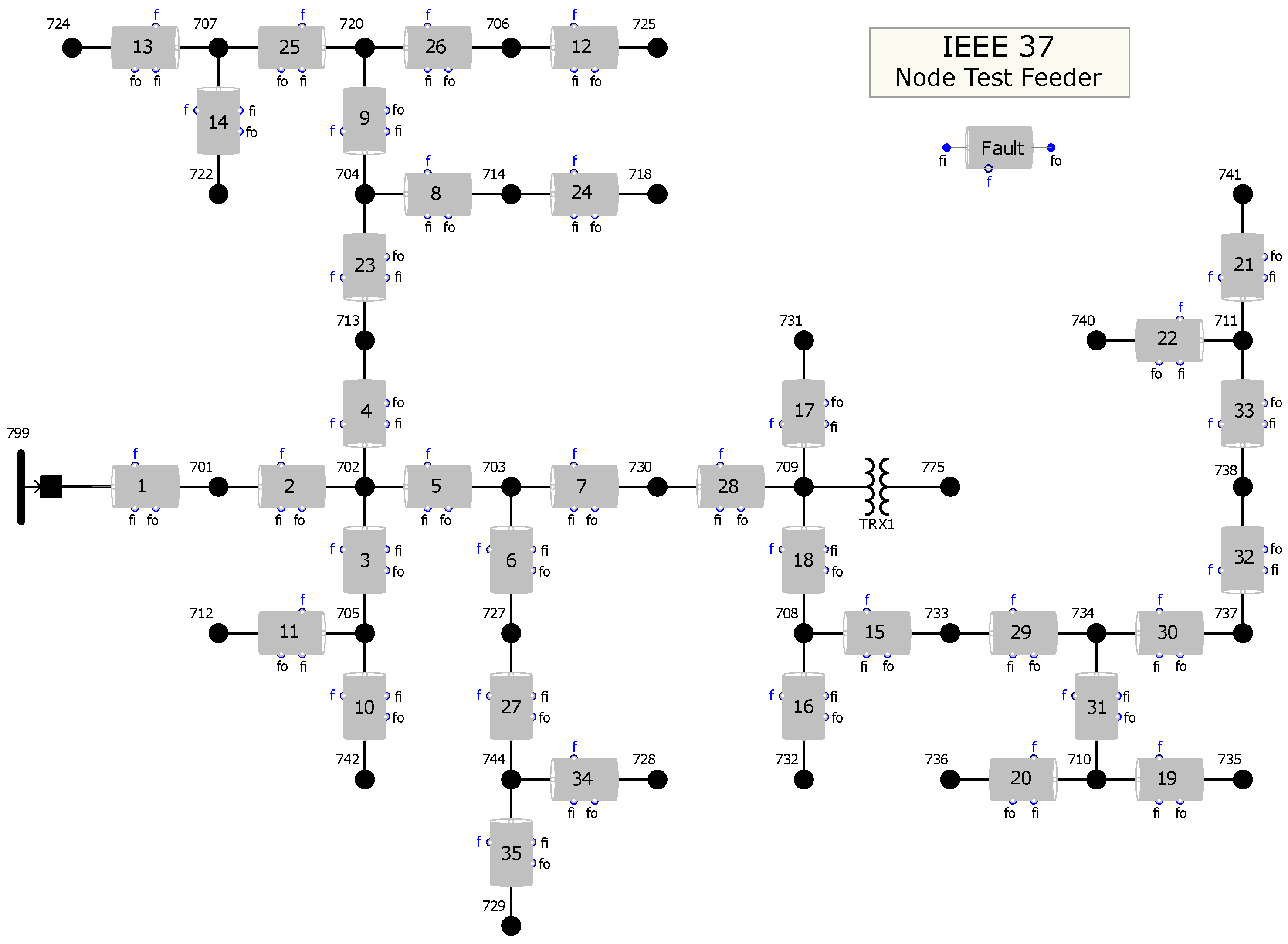
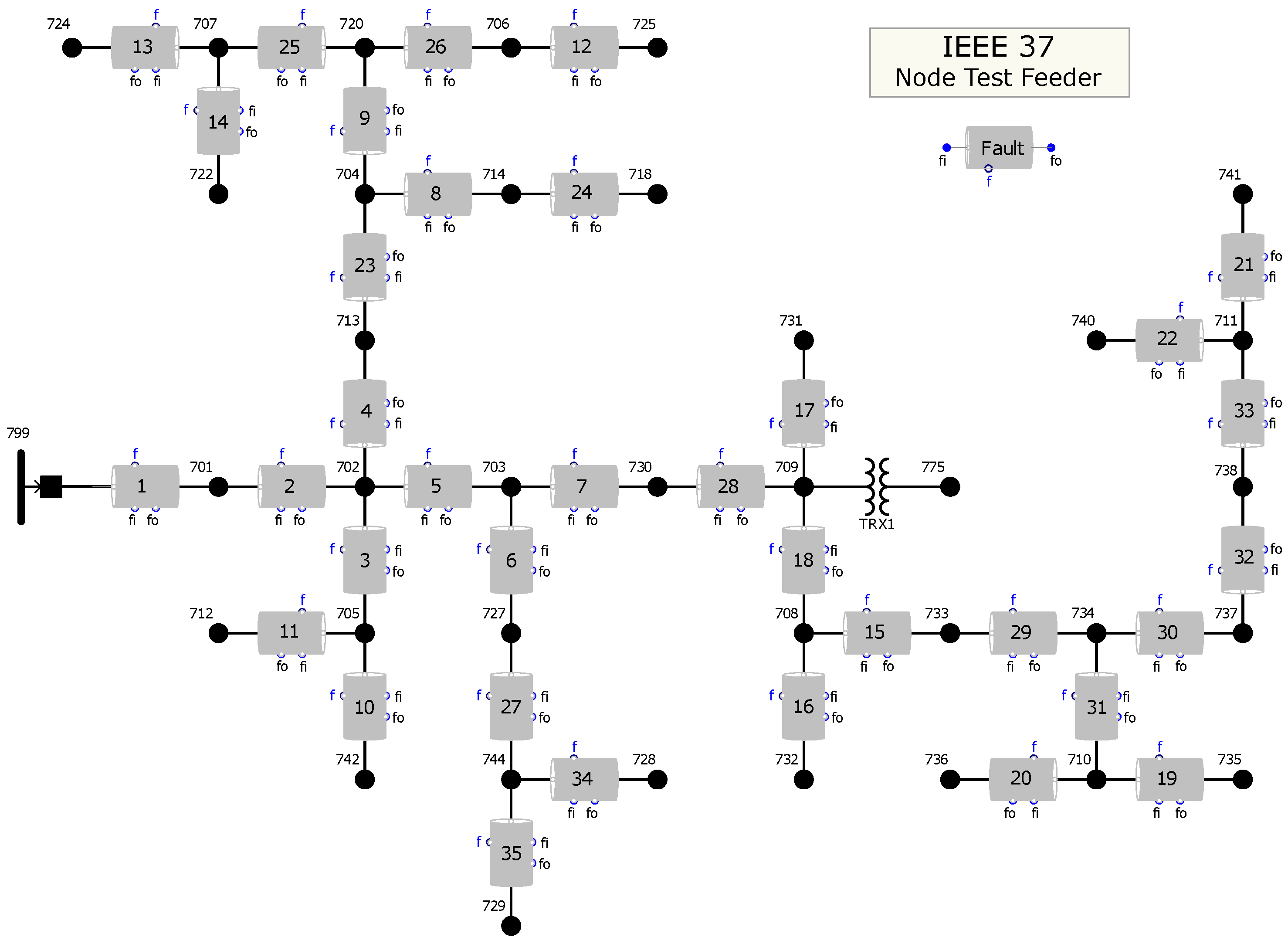
As already discussed in previous sections, this work poses an exhaustive dependency analysis for different impedance-based fault location methods. Obviously, each method has been evaluated individually. However, these results have been done over different testbed networks, making a comparison between their results difficult. In this sense, the IEEE 37 Node Test Feeder [
72] (shown in
Figure 10) was chosen as the standard underground testbed for this work.
This feeder is one IEEE Node Test Feeders [
73] and models a real line located in California. It has an operating voltage of 4.8 kV and its main characteristic (and the reason why it was selected) is that all its line segments are underground (modeled as
π-sections characterized by their mutual coupling matrices and their shunt capacities). Moreover, this standardized test network was chosen because of the relative ease with which it could be followed up on with other future location methods. Thus, this line feeder has been implemented in the PSCAD
TM simulation tool [
74]. This model provides the main advantage that it can be used to simulate many fault configurations, without subjecting the cabling to extreme conditions typically associated with a fault event which could degrade it.
Thus, a large number of simulations have been done. Each simulation represents a different fault and network configuration (see
Table 2), reaching a total of 176400 cases, storing their associated measurement.
This simulation set allows us to study the method behavior under different configurations, highlighting their advantages and dependencies in each case.
5. Results
Once the model and its simulation set have been defined, and the resulting information from its execution over PSCADTM has been generated, the next step is to analyze the results of applying the six methods selected for this study on it. In this sense, a global evaluation (with the complete simulation set) of them is proposed as the first analysis. Specifically, this analysis has been divided into two stages:
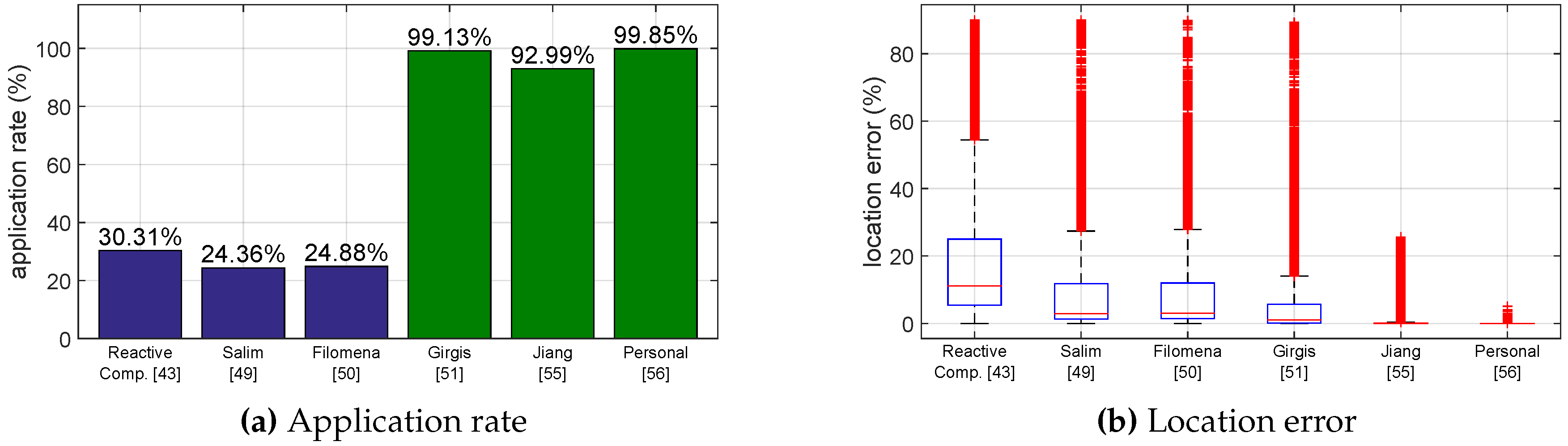
The first stage evaluates the methods’ applicability (when a method obtains a valid result). It allows us to identify when a method offers a valid fault position estimation. This validation criteria considers the limitation of methods (e.g., Reactive Component is only applicable to simple fault) and rejects incoherent results when they are outside of the section (
or
). This analysis is shown in
Figure 11a.
In
Figure 11a, it is easy to note that one-end methods (the blue ones) have a significantly lower application rate than multi-end methods (the green ones). This fact is mainly caused because these methods fail when the fault appears in segments away from the network header (measurement point). Thus, this problem slightly decreases in the Reactive Component method. This is due to the fact that this method compensates its inability in three-phase faults with its greater applicability under low value load cases. As opposed, multi-end methods provide excellent application rates. However, this comparison must take into account that one-end methods require less information (only measurements at the network header), so that they are at a disadvantage to get a result.
Thus, the Personal et al. method highlights with its highest applicability index, only with a of inability cases. This small percentage is associated with three-phase faults and lowers sheath-to-ground resistance values under which the sheath currents are insufficient to apply this method.
In the second stage, the methods’ errors in the estimated position (
d) are compared amongst them (see
Figure 11b). These errors are represented by box-and-whisker diagrams, it is possible to note how the error dispersion of Jiang et al. and Personal et al. methods are significantly lower than others. Besides, Filomena et al. is the best option of studied one-end methods. This fact is logical because this method is aimed at underground networks. However, many outliers can be observed in this figure. These values mainly correspond to sets of cases where each analyzed method has trouble. Specifically, this fact will be easily noted in the dependency study (
Section 5.1,
Section 5.2,
Section 5.3,
Section 5.4,
Section 5.5,
Section 5.6 and
Section 5.7), where parameters such as line-to-sheath resistance, which has a high error when it increases, concentrates many cases on outlier area, especially for one-end methods.
As a summary,
Table 3 shows all of this information, reflecting both studies numerically. In this table, average, maximum and standard deviation of error values can be compared amongst all studied methods. Thus, after analyzing the results of the complete data set, the following sections will focus on the dependence analysis with the different parameters covered by the simulated cases.
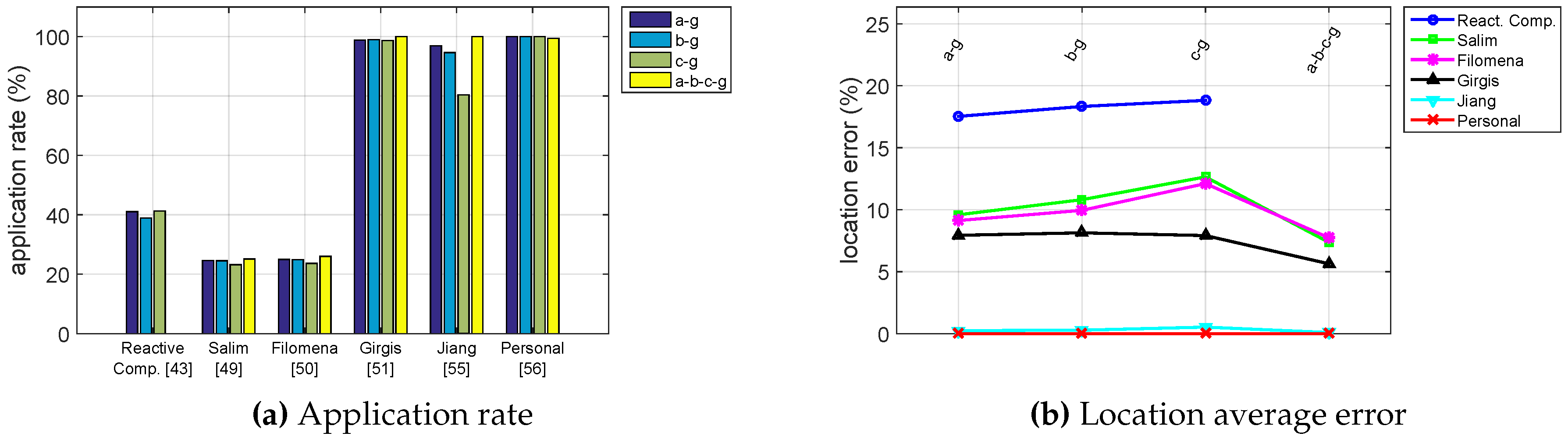
5.1. Fault Type Analysis
In this section, a fault type analysis has been selected as the first study. Following the philosophy of the global analysis, it has also been divided into two stages: an applicability study (see
Figure 12a) and an error study (see
Figure 12b). Additionally, numerical results of both stages are summarized in
Table A1 (in the
Appendix section).
From this study, it is easy to note the lack of information for three-phase fault in the Reactive Component method. It is due to its inability to estimate a position under this situation. Thus, a reduction in the effectiveness in some of these methods (on the application rate in Jiang et al., and on the location error in Salim et al. and Filomena et al.) for single fault in line c cases is detected. However, this error is not an effect of the fault type. It is due to the fact that this line is unbalanced and has a higher load than others.
In summary, based on the obtained data, it could be argued that the studied methods do not have a strong dependency on the type of fault.
5.2. Insertion Angle Analysis
This analysis evaluates the dependency on the instant when the fault occurs, sweeping values of
,
,
and
. In this sense,
Figure 13a shows an applicability study and
Figure 13b shows an error study for each method. Additionally, numerical results are summarized in
Table A2 (in the
Appendix section).
From this study, it is possible to determine that the insertion angle is not a critical parameter for the estimation of fault position in analyzed methods.
5.3. Normalized Position Analysis
The next analyzed parameter is the normalized position (
d) within the line section. In this case, the studied cases sweep the values
,
,
,
and
. From this analysis,
Figure 14 is generated, showing the application rates and location errors for each method. Additionally,
Table A3 (in the
Appendix section) summarizes their numerical results.
From this study, it is possible to note that the Reactive Component method performs better in the central portion of the line sections. Salim et al., Filomena et al. and Girgis et al. behavior methods worsen by the increase of d. The Jiang et al. method keeps the error retaining its approximately constant value, but worsens its application rate (about 10%) by moving away from the center of the line sections. Conversely, the Personal et al. method shows a similar behavior for the entire analysis.
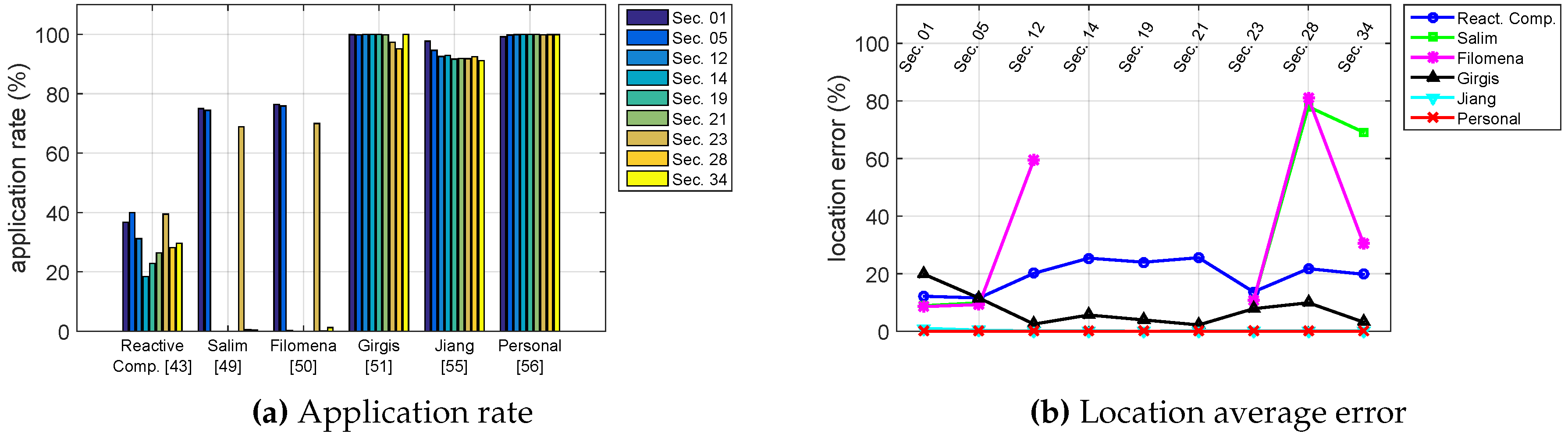
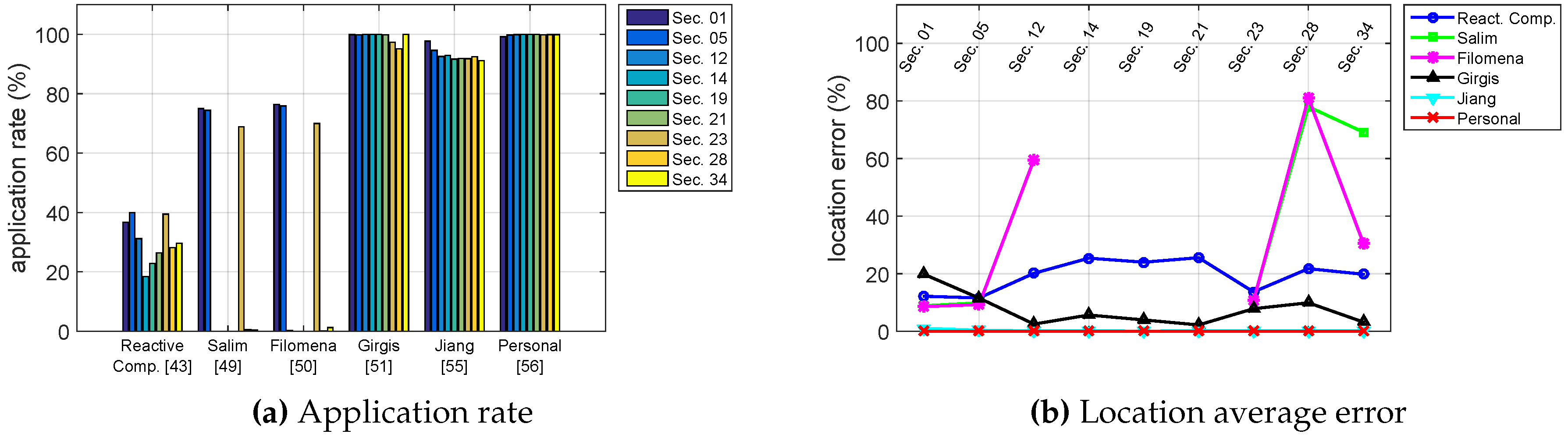
5.4. Affected Fault Section Analysis
In the same direction as the previous section, this study analyzes the behavior of each method result related to the fault position. However, in this case, it is associated with different line sections (see network topology,
Figure 10). Specifically, this parameter has been swept for sections 1, 5, 23, 28, 34, 12, 19, 21 and 14 (in order of distance), their results being shown in
Figure 15. Thus, numerical results are summarized in
Table A4 (in the
Appendix section).
In this Figure, it is easy to note that the methods of Salim et al. and Filomena et al. exhibit a bad performance, if we turn away from the measuring point (obtaining acceptable results only for the three closest segments). The Reactive Component method is also affected by this parameter, but to a lesser degree. Conversely, as was expected, multi-end methods are not affected by this parameter, because their estimation is directly based on the measurements at both sides of each segment.
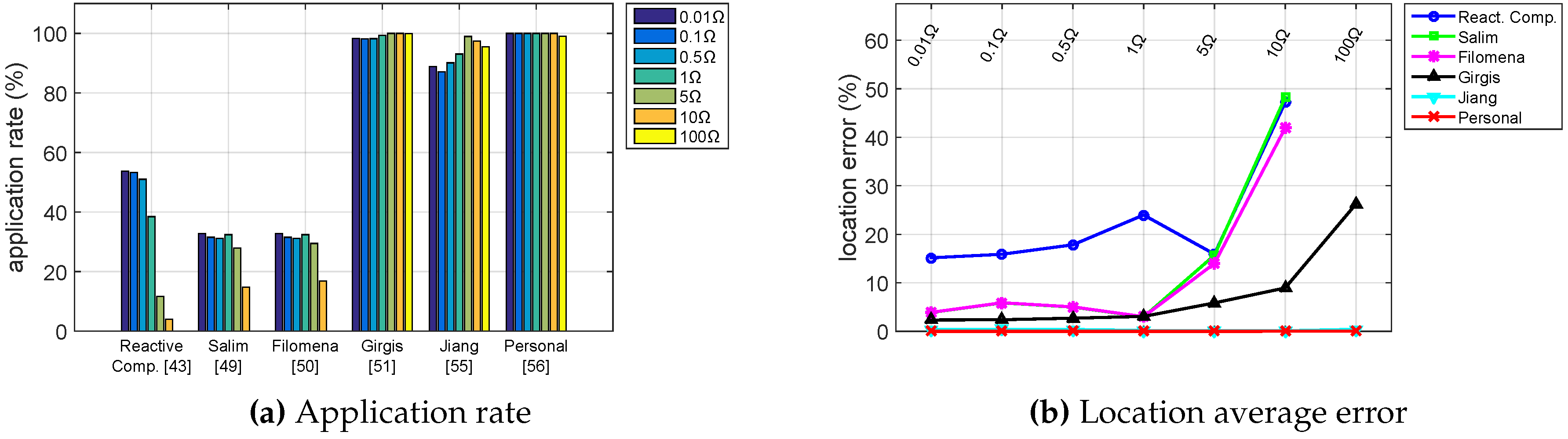
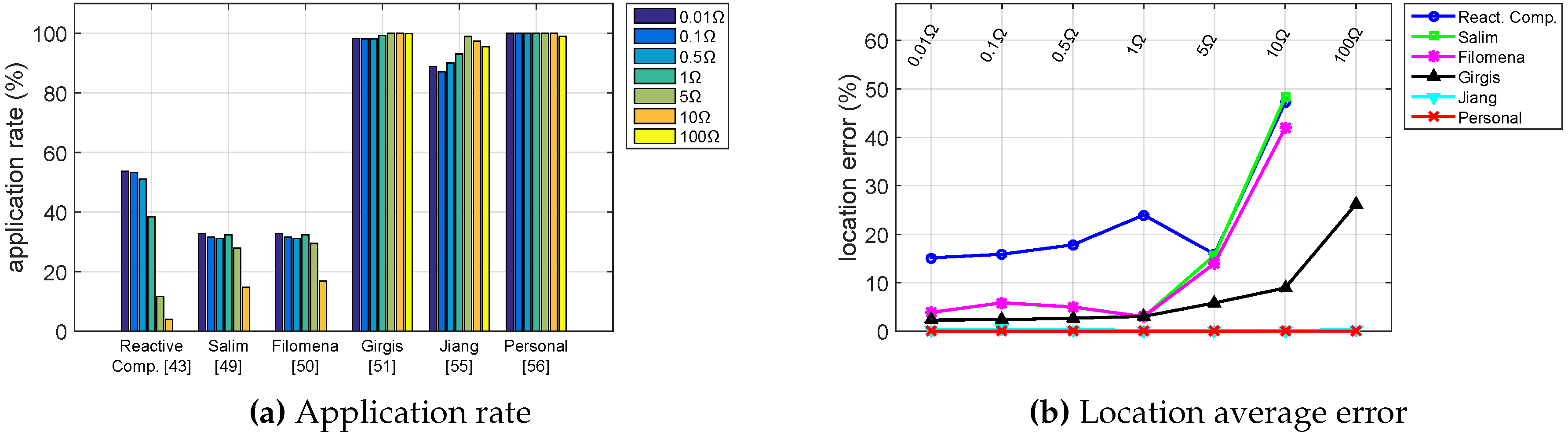
5.5. Line-To-Sheath Resistance Analysis
A typical trouble in fault location methods is their dependency on the fault resistance value. In this work, in order to achieve better characterization of the underground network behavior, this resistance is divided into two parts. Specifically, dependency related to the resistance between the conductor and cable sheath in a fault situation will be analyzed in this section. This line-to-sheath resistance (
) has been swept for 0.01, 0.1, 0.5, 1, 5, 10 and 100 Ω values; their results being shown in
Figure 16 and their numerical results in
Table A5 (in the
Appendix section).
In this sense, it is easy to note in
Figure 16 that the applicability of one-end methods decreases dramatically for high values of this resistance. Additionally, the location error of these methods also gets worse, as was commented in
Section 3.1. Conversely, multi-end methods keep their behavior approximately constant, with only Girgis et al. showing an increase in the error for very high values of this parameter.
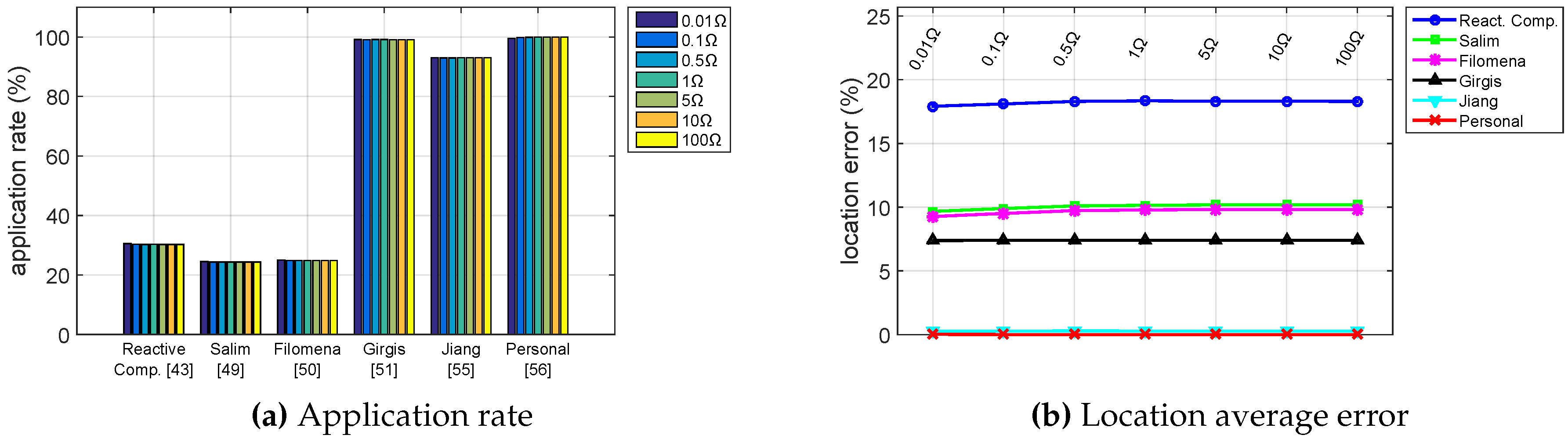
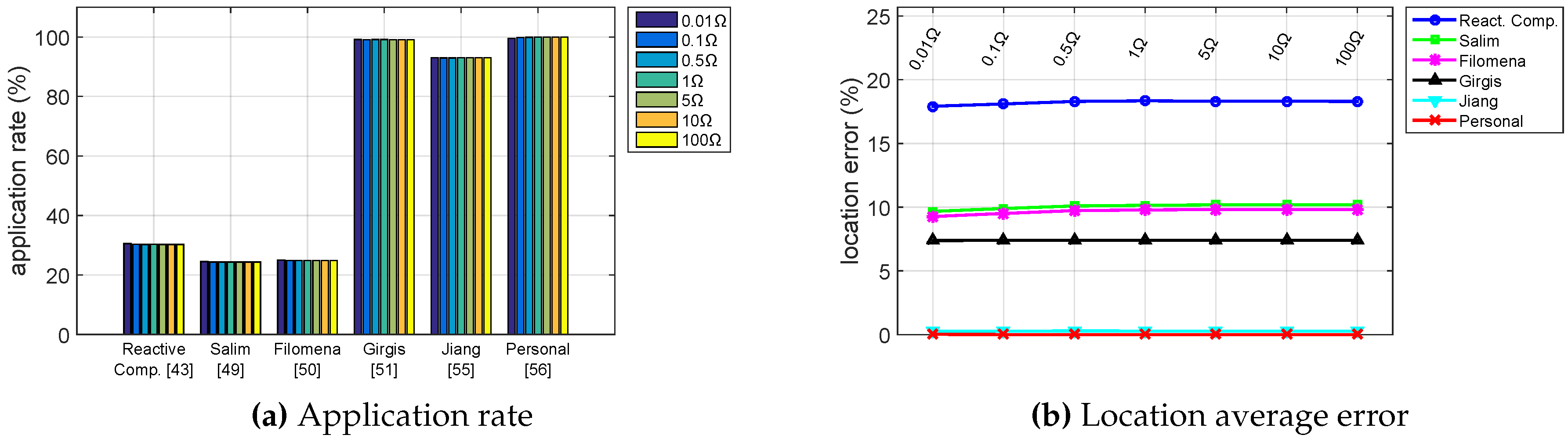
5.6. Sheath-To-Ground Resistance Analysis
This section analyzes the second part of the fault resistance model. It characterizes the resistance which appears between the cable sheath and earth potential in a fault event. As in the previous section, this sheath-to-ground resistance (
) has been swept for 0.01, 0.1, 0.5, 1, 5, 10 and 100 Ω values; their results being shown in
Figure 17 and their numerical results in
Table A6 (in the
Appendix section).
As can be seen in both Figures, it is not only the behavior of the six studied methods that is affected by this parameter. This fact can be explained because the sheath acts as a better way (with less resistance) for the fault current than ground potential, only appreciating small variations for very small values of this parameter.
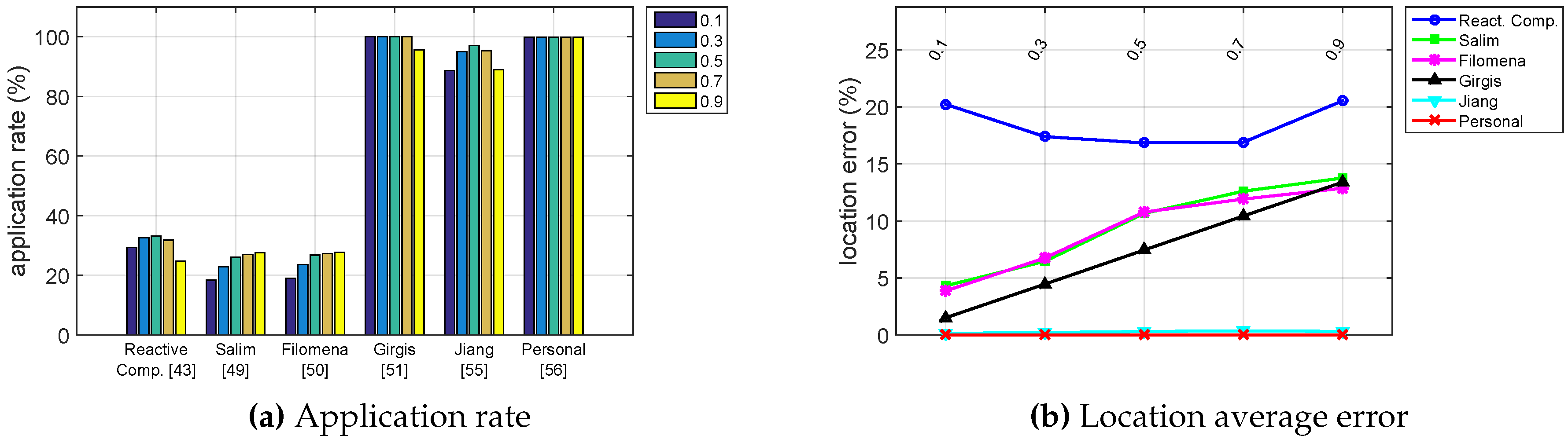
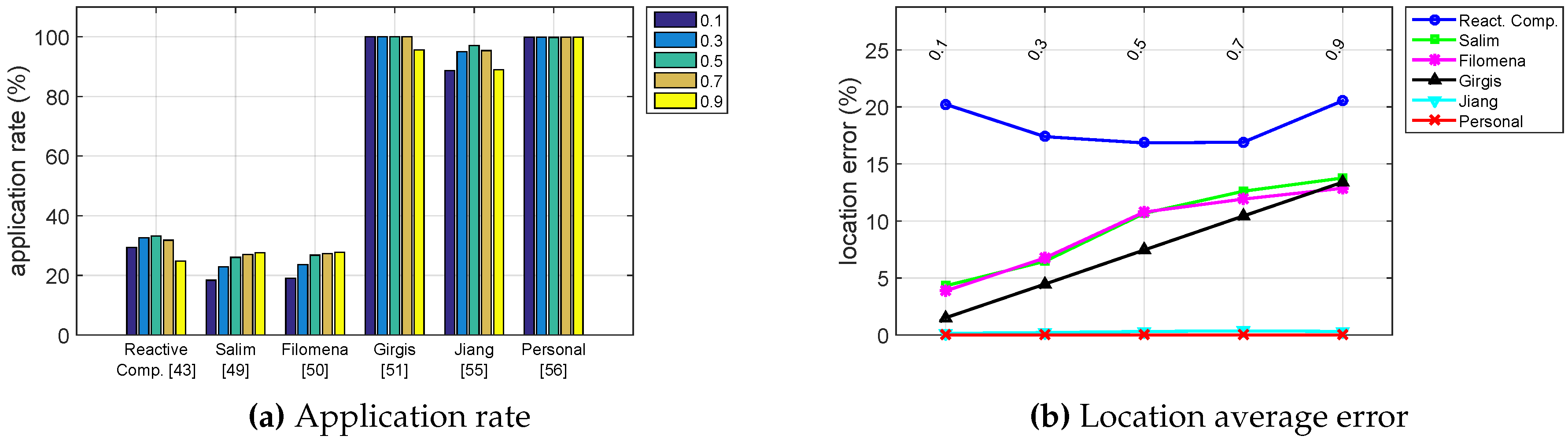
5.7. Applied Load Percentages Analysis
The last study is related to the network load level. For this study, several percentages of a load factor have been applied over the network. Specifically, this parameter has been swept for
,
,
,
and
of the load associated with this network. Following the philosophy of previous sections, it has also been divided into two stages: an applicability study (see
Figure 18a) and an error study (see
Figure 18b). Additionally, numerical results of both stages are summarized in
Table A7 (in the
Appendix section).
In this sense, on the one hand, the Reactive Component method is highlighted by its strong dependency on this parameter. This fact occurs because, as already discussed above, this method assumes that overall registered current is completely due to the fault event (dismissing the load effects). Obviously, it operates significantly worse when this load current is not negligible. Thus, the behavior of the other one-end methods remains approximately stable under changes in this parameter. In the other one-end methods, their behavior remains approximately stable with this parameter. On the other hand, regarding the multi-end methods, Jiang et al. and Personal et al. show a fairly stable behavior. This fact is logical, due to their multi-end philosophy (with measurements at both ends of the line section). However, the Girgis et al. method does not have this characteristic, increasing its error with this parameter.
6. Conclusions
Throughout this paper, the needs for better strategies on operation and planning tasks are highlighted as a key factor in SG networks. In this sense, fault location is a cornerstone of the OMS, allowing this system to identify the fault position and mitigate its consequences.
In this paper, a comparative review of different fault location techniques has been done. Specifically, this study is focused on impedance-based methods because they are more in line with typical instrumentation deployed in the distribution systems, distinguishing two sets of methods. On the one had, one-end methods have been analyzed, the main advantage being less deployment needs (only one measuring point). However, they have higher errors than the second set of methods, and have the significant drawback of not being compatible with DG scenarios. Reactive Component, Salim et al. and Filomena et al. methods have been chosen as relevant examples for their evaluation. On the other hand, multi-end methods have also been studied. This set provides better results than one-end methods. However, this fact mainly occurs because they are supported by a greater measurement infrastructure, which is significantly more expensive than one-end method deployments. Additionally, multi-end methods are compatible with DG scenarios, thus being a perfect solution for SG networks. For this second set, the methods of Girgis et al., Jiang et al. and Personal et al. have been the chosen methods as relevant examples for their evaluation.
In this sense, these six chosen methods have been widely tested, studying their dependencies under different conditions. All of these studies have been based on an implementation over PSCADTM of a standard test network (the IEEE 37 Node Test Feeder). The use of a common testbed has allowed this study to coherently compare the different method results, beyond typical individual analyses in these methods. Thus, for these studies, the multi-end methods of Personal et al. and Jiang et al. are the best options due to their excellent results. However, Filomena et al. is the best option of the analyzed one-end method, being a good option for underground networks where a multi-end deployment is not possible.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}