1. Introduction
The risk, price inconsistency and environmental impact associated with oil and gas exploration and production have driven a focus on renewable energy. Wind power, the fastest growing source of renewable power generation in Europe, is a major competitor to oil and gas. The strong and stable wind at offshore locations and the increasing demand for energy have surged the application of wind turbines in deep water.
The Floating Horizontal Axis Wind Turbine (FHAWT) has been a research focus in deep water wind power production due to its commercial success in onshore applications. However, the application of Floating Vertical Axis Wind Turbines (FVAWT) in deep offshore waters has potential because of their economic advantages in installation and maintenance. The application of Vertical Axis Wind Turbines (VAWT) rotor technology in large wind turbines could reduce the cost-of-energy (COE) by over 20% [
1]. Furthermore, due to the higher maintainability of FVAWTs, their ability to capture wind energy irrespective of wind direction without a yaw control mechanism, lower center of gravity, economies of installation amongst other designs as compared with FHAWTs [
2], FVAWTs could be a better concept in deeper water applications. These aforementioned advantages have steered resurgence of interest in research on the application of FVAWTs in deep waters [
3,
4]. Studies have focused on the design, structural integrity, dynamic response and installation methodologies to better understand the performance of the various concepts and to provide the basis for detailed structural designs [
5,
6,
7,
8,
9,
10]. Hence, various concepts were developed and investigated for use as floating substructures to support wind turbines. These concepts include the spar [
11], the semi-submersibles [
7,
10] and the Tension Leg Platform (TLP) concept [
12].
The dynamic response of a floating wind turbine differs significantly from that of a bottom-supported substructure or a land-based wind turbine. Floating wind turbines will experience large aerodynamic and hydrodynamic loads, including loads due to the rotating blades. Therefore, it is pertinent to analyze numerous substructure concepts in order to understand their respective responses and suitability for a particular sea state. Various FVAWT concepts have been evaluated, such as the DeepWind concept [
13,
14,
15], the VertiWind concept [
16] and the Aerogenerator X concept [
17], for conceptual designs and technical feasibility. The DeepWind concept and the VertiWind concept were studied, but the AeroGenerator-X concept was only proposed without any detailed report or relevant publication. A novel concept combining the DeepWind 5 MW rotor [
18] and the DeepCwind floater from the Offshore Code Comparison Collaboration Continuation (OC4) project [
19], were extensively investigated as well. Furthermore, a variety of studies applied different simulation tools to investigate the response characteristics of FVAWTs to provide the conceptual design descriptions and detailed evaluation of technical feasibilities of the various concepts.
Limited state-of-art simulation codes have been developed over the years for conceptual evaluation of FVAWTs. These include (Horizontal Axis Wind turbine simulation Code 2nd generation) HAWC2, (Floating Vertical Axis Wind Turbine) FloVAWT, Simo-Riflex-DMS, etc. HAWC2 [
20,
21,
22] was developed at Risø, Technical University of Denmark (DTU). In order to equip HAWC2 with the ability to model FVAWTs in the time domain for the DeepWind FVAWT an improved aero-elastic code based on the Actuator Cylinder (AC) model was linked to it using a Dynamic Link Library (DLL). HAWC2 is a multi-body simulation tool which allows the separate modelling of individual components of a turbine. However, the hydrodynamic model employed is more accurate for slender substructures like spars (Morrison-like structures), thus, it is considered unsuitable for analysing structures such as semi-submersibles. The coupled aero-hydro-servo-elastic code, Simo-Riflex-Aerodyn was also developed [
23] to fully integrate the complete features of Aerodyn [
24] into Simo-Riflex coupled code. However, this is used for modeling FHAWT and is not suitable for FVAWT. At Cranfield University in the UK, Borg et al. [
25] developed a simplified coupled code designed using MATLAB programming for preliminary design analysis of FVAWTs. This code is called FloVAWT. The code has been in continual development and verification by Collu et al. [
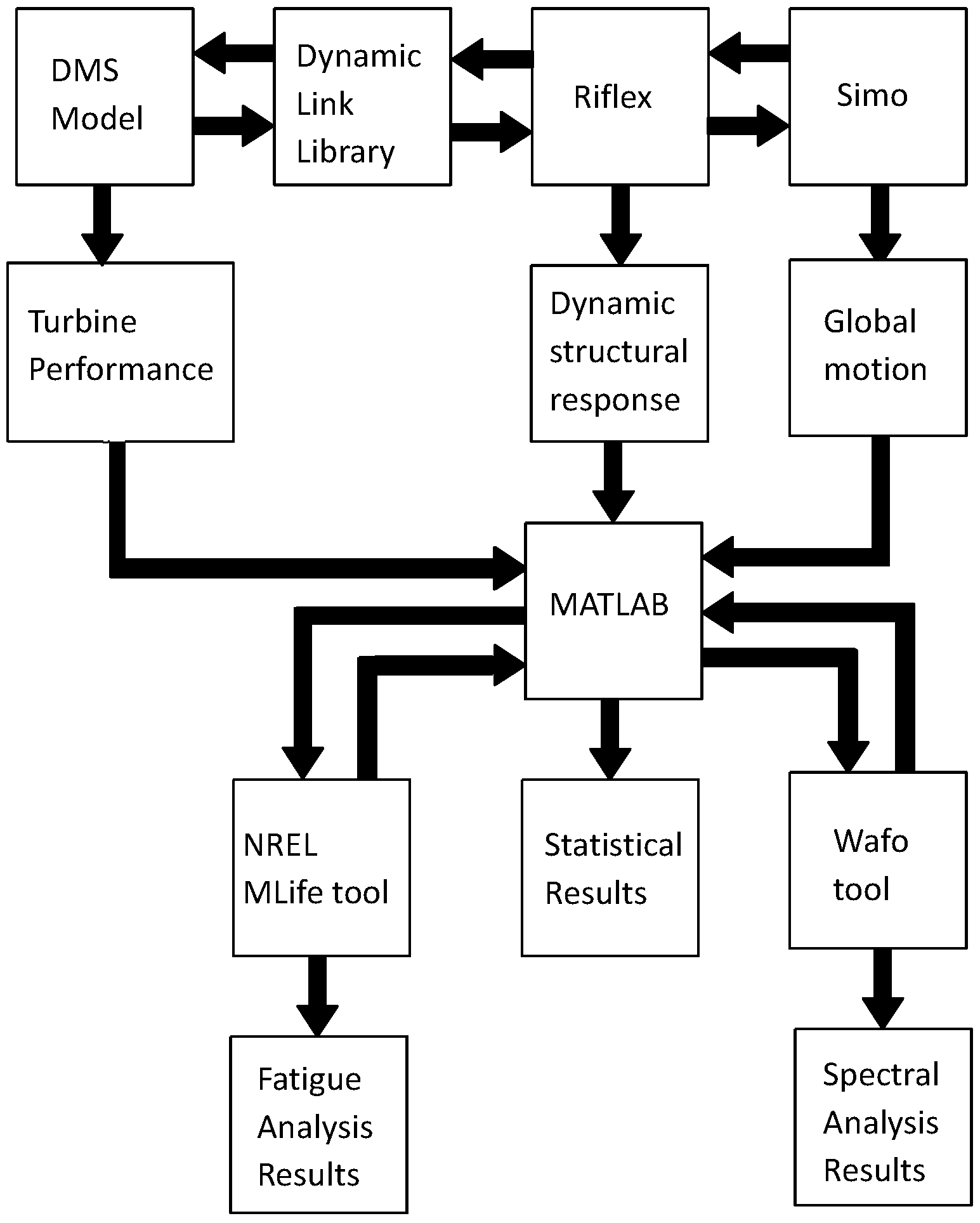
26]. However, the code was criticized for lacking a structural model, mooring line model and dynamic control model, hence, a rigid rotor is assumed to rotate at constant speed while the relationship between force-displacement is linearized. A non-linear aero-hydro-servo-elastic, Simo-Riflex-DMS was developed by Wang et al. [
27] for modeling FVAWTs with semi-submersible substructure. The Double Multiple Streamtube (DMS) code [
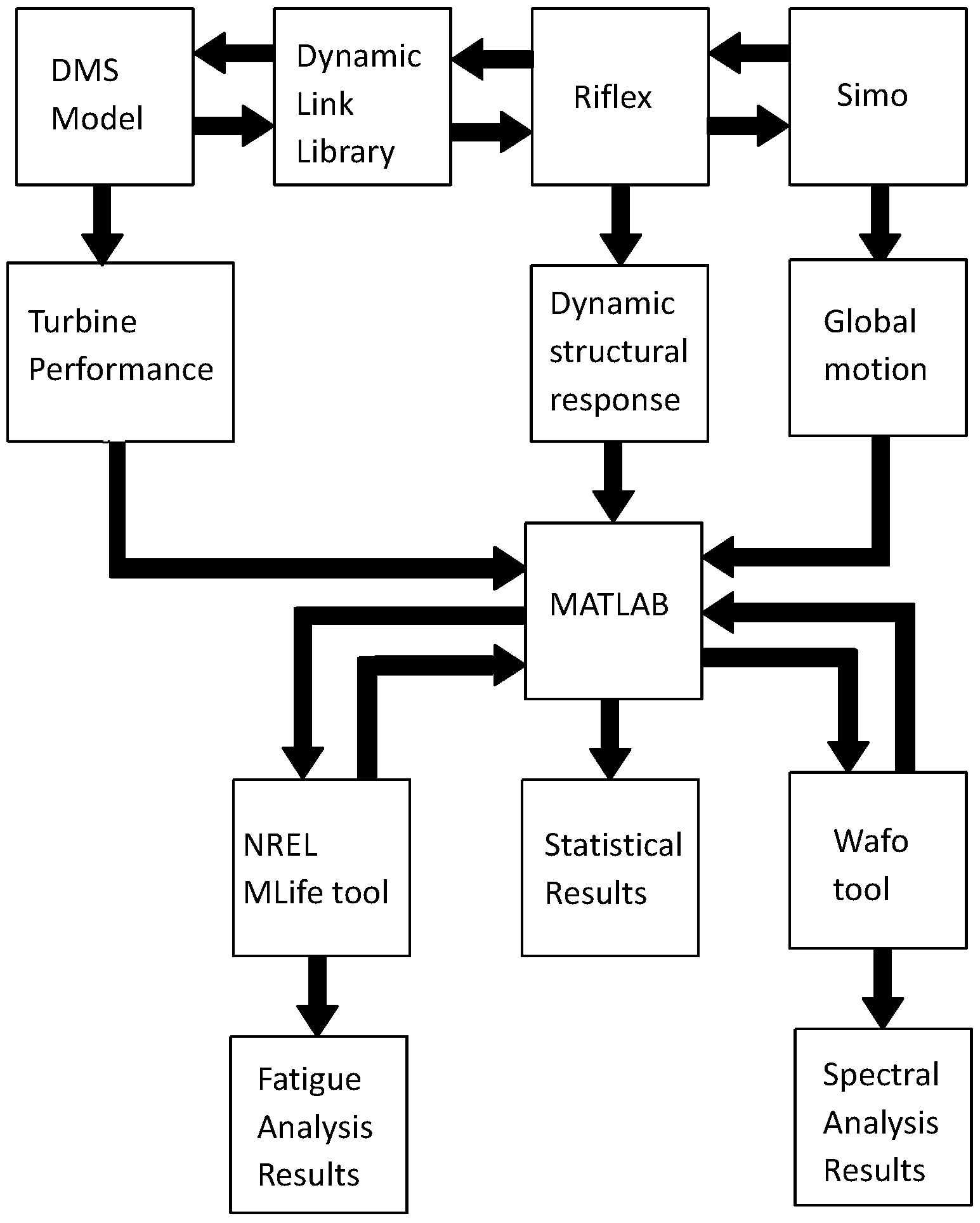
28] is an aero-elastic code used to model the aerodynamic loads on the wind turbine rotor. The Riflex code is the finite element solver and as well, serve as a link to external modules/codes while the SIMO code is used to model the floater hydrodynamics. Therefore, Simo-Riflex-DMS code coupled the aerodynamic, the hydrodynamic, the structural dynamic and the generator controller modules. The Simo-Riflex-DMS has been used to study a novel concept that combined the DeepWind 5 MW rotor [
18] and the DeepCwind floater from the OC4 project [
19], in a fully coupled time domain simulation [
27]. The Simo-Riflex-DMS model, as developed by Wang et al. [
27], is adopted for this work.
The dynamic analysis and comparative studies of different FVAWT concepts have been performed. These include the dynamic analysis of a 5 MW Darrieus curved bladed VAWT with rotating foundation [
29]. However, the VAWT was coupled to a spar platform. A further analysis of this concept has been carried out at DTU, to reduce the VAWT’s weight and the bending loads on the rotor [
30]. A novel concept that combines the 5 MW Darrieus curved blade VAWT with a semi-submersible platform has been extensively studied by Wang et al. [
2,
4,
31]. Additionally, a comparative study of the FVAWT concept by Wang with two similar FVAWT concepts (a combination of the 5 MW Darrieus curved bladed VAWT with: 1) a spar platform and 2) a TLP, has been performed by Cheng et al. [
32]. He concluded that the semi-submersible and the spar abated the 2P effects on structural loads and mooring line tensions as compared to the TLP concept, at the expense of larger platform motions. A further study has been carried out to evaluate the effect of difference-frequency forces on a FVAWT with semi-submersible platform under misaligned wind-wave conditions [
33]. The effect of wind-wave misalignment and the second order difference frequency force on the FVAWT were more significant at extreme values of the responses, especially at wind speeds above the rated wind speed.
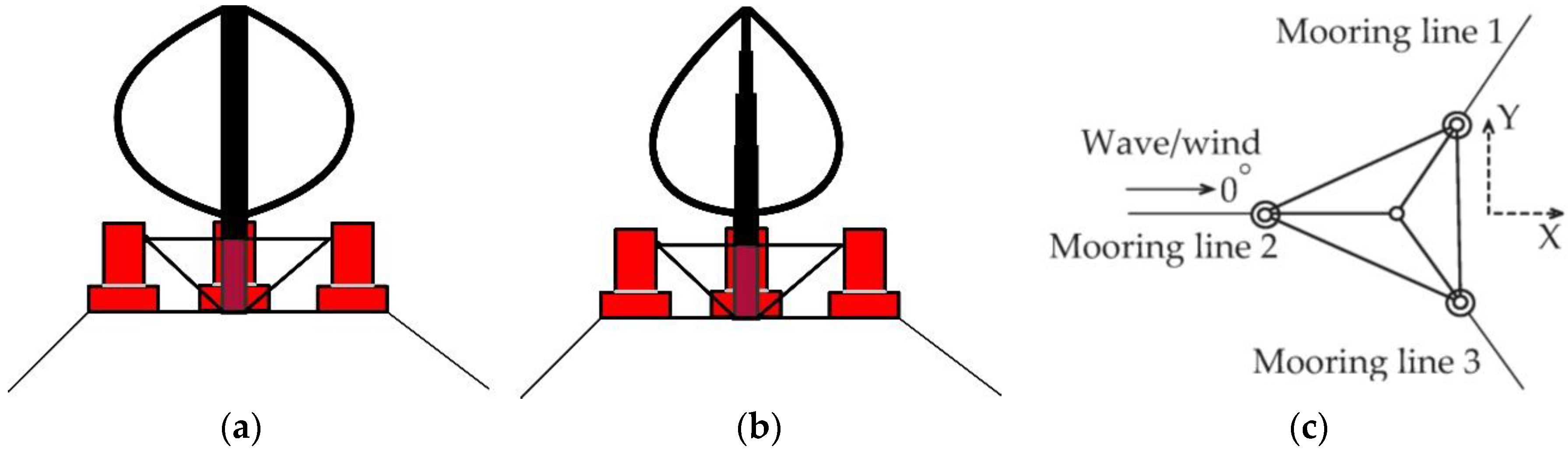
In this work, a baseline semi-submersible FVAWT concept [
34] is adopted. This concept has been studied in a systematic manner: a method for the analysis has been developed; global motion for the floating support structure was comprehensively analyzed—considering normal operating condition and emergency shutdown; a comparative analysis between the proposed model and an equivalent model of an Horizontal Axis Wind Turbine (HAWT) rotor has been carried out including a stochastic analysis of the model [
2,
4,
25,
27,
31,
33,
35,
36]. Furthermore, the response of the concept in combination with an hydrodynamic brake under emergency condition has been investigated [
31]. However, extensive investigations of structural responses of flexible components such as the blades, the tower and the mooring lines, include the blade bending moment distributions and fatigue responses have not been carried out. For FVAWTs, the continuously varying aerodynamic loads on the rotor lead to a considerably higher load level and increasing number of load cycles. Therefore, it is significant to evaluate fatigue damage based on the time history of FVAWTs responses. The rainflow counting technique is used for the fatigue cycle counting while the Mlife tool from the National Renewable Energy Laboratory (NREL) is used to calculate the short-term fatigue damage equivalent loads for the FVAWT.
The dynamic responses of the 5 MW baseline FVAWT were investigated by analyzing the platform global motion, the analysis of structural loads of flexible components, and the estimation of the short-term fatigue damage equivalent loads of the structural components. Furthermore, this work is extended to evaluate the performance of a 5 MW optimized FVAWT in terms of power production, structural dynamic response, global motion and short-term fatigue damage on structural components. The 5 MW optimized FVAWT is a concept combining the optimized 5 MW DeepWind rotor [
30] from the Technical University of Denmark (DTU) and the DeepCwind semi-submersible from the OC4 project [
19]. The 5 MW DeepWind rotor was optimised by a group of researchers at DTU. The tower of the rotor is optimized to weighs 67% less than the tower for the baseline 5 MW DeepWind rotor with lower bending moments [
37]. The two FVAWT models were evaluated under the same environmental conditions. A comparative analysis of the response results of both FVAWT models are presented to explore the advantages of the optimized 5 MW DeepWind rotor.
4. Conclusions
This work centers on the structural dynamic analysis of FVAWTs with major contribution on the distribution of bending loads along the blade and fatigue damage on flexible components which has not been fully explored for the rotor blade in the literature. Furthermore, the work is extended to compare the performance of two FVAWTs models, the 5 MW optimised FVAWT with the 5 MW baseline FVAWT, in terms of power production, dynamic structural response, global motion and short-term fatigue damage of structural components to scrutinize the advantages of the 5 MW DeepWind rotor.
The dynamic response characteristics of the FVAWTs were comprehensively using a coupled non-linear aero-hydro-servo-elastic code (the Simo-Riflex-DMS code), developed by Wang for modeling FVAWTs. This coupled code incorporates the models for the turbulent wind field, aerodynamics, hydrodynamics, structural dynamics, and controller dynamics. The simulations were performed in a fully coupled manner in time domain.
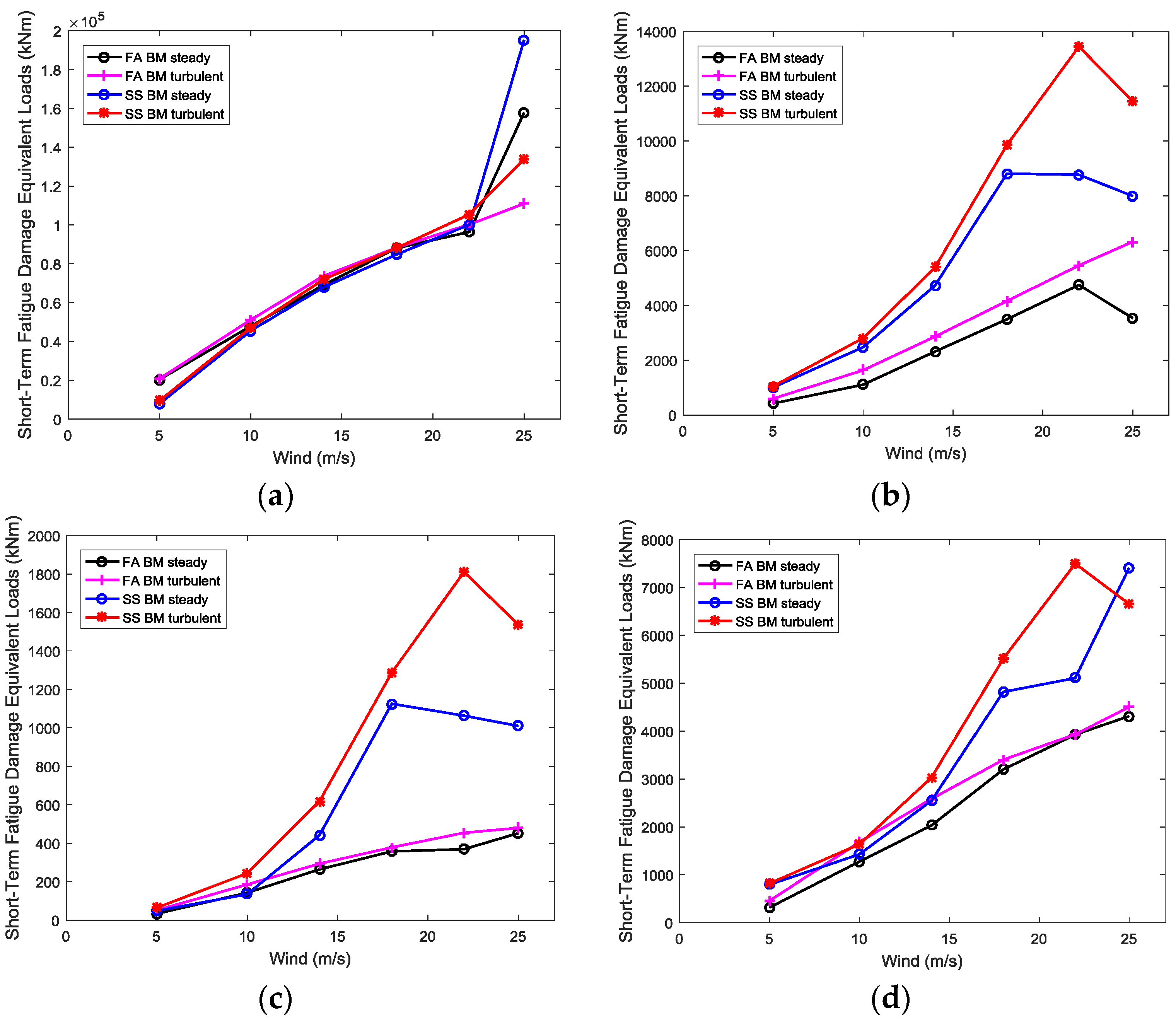
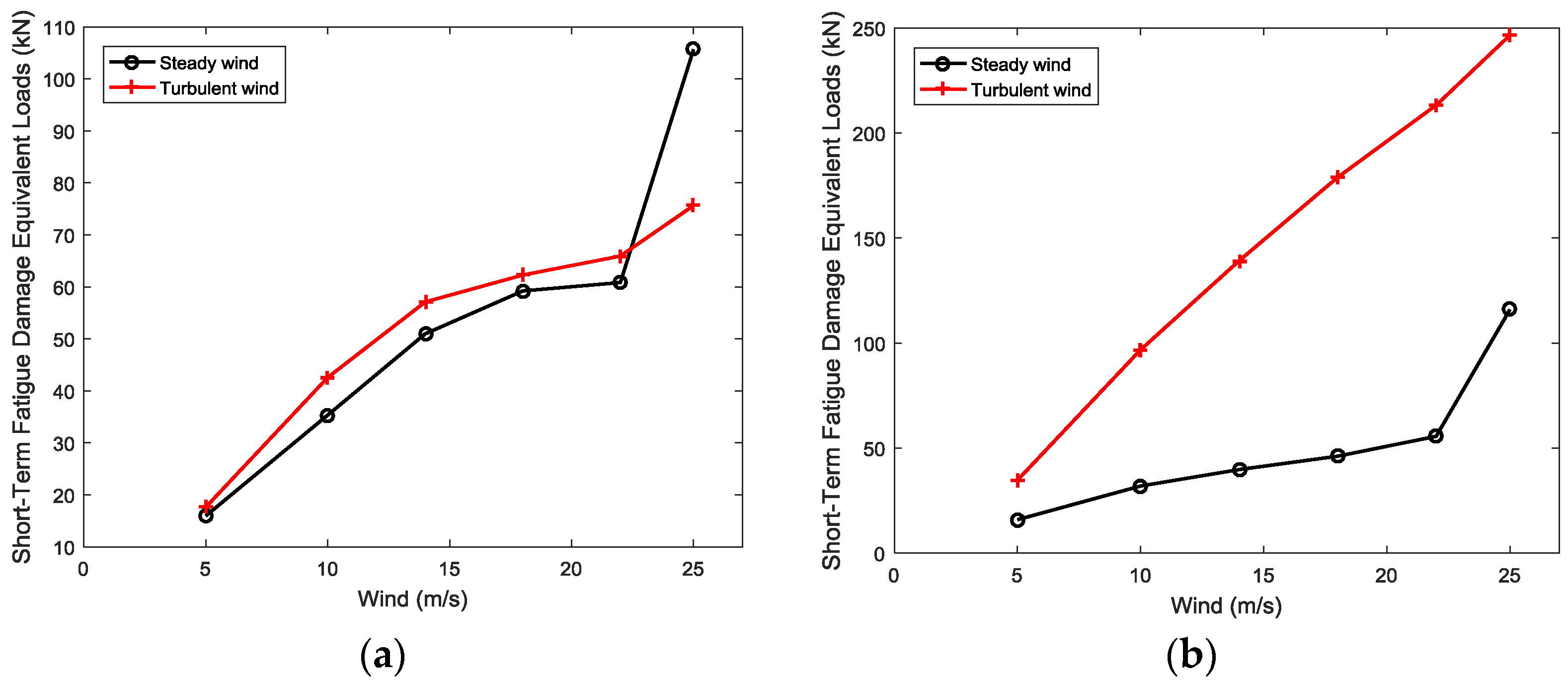
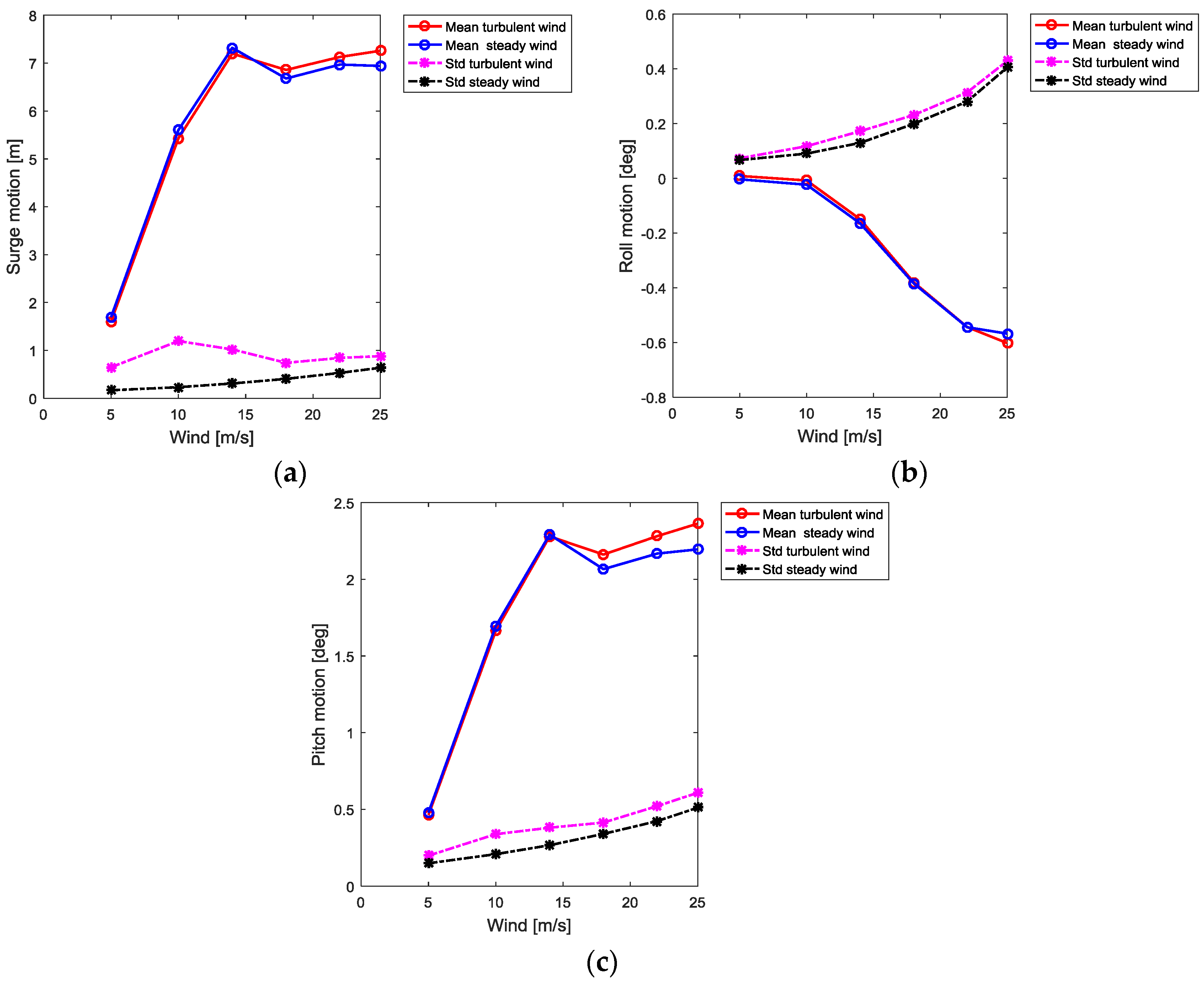
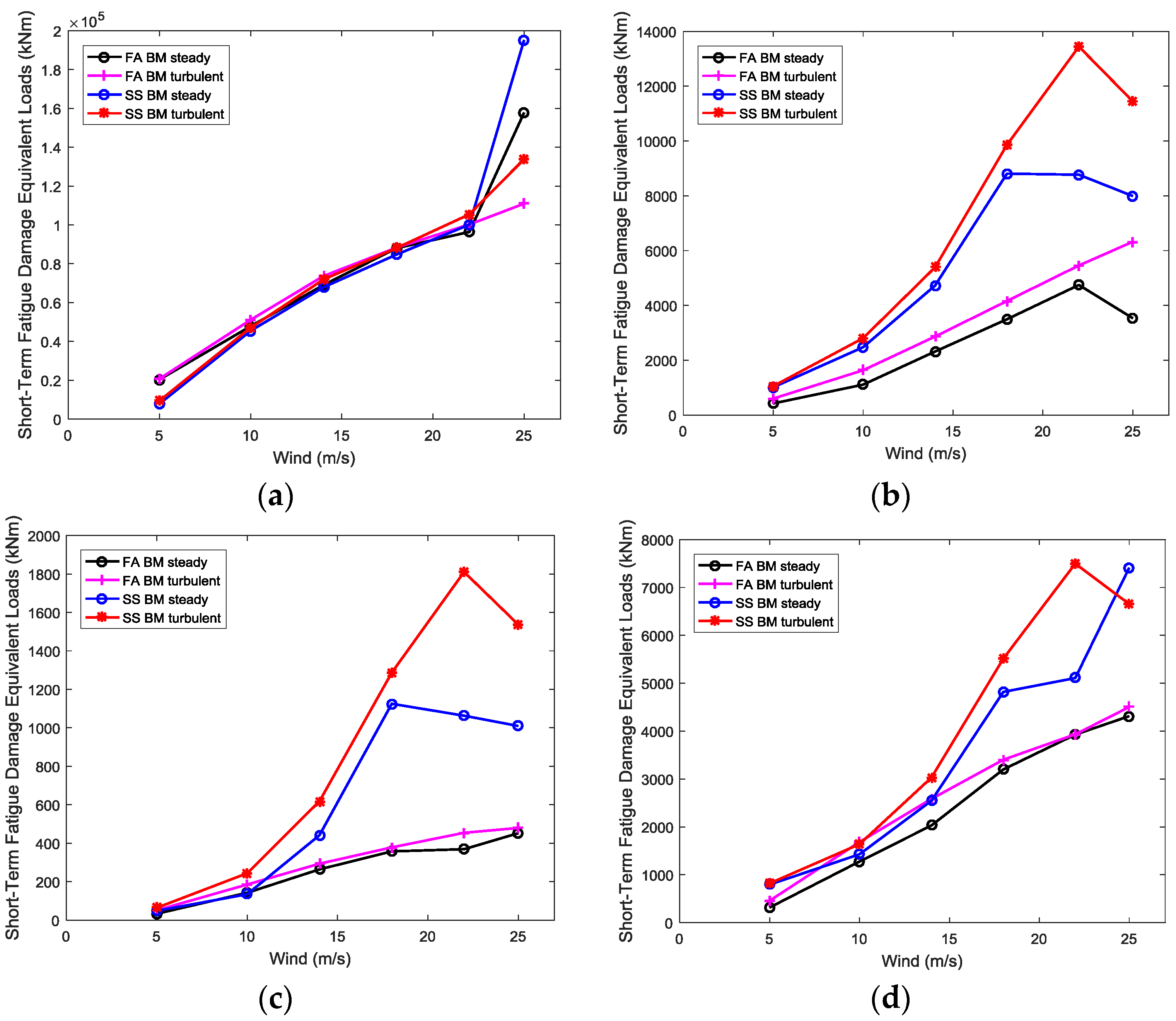
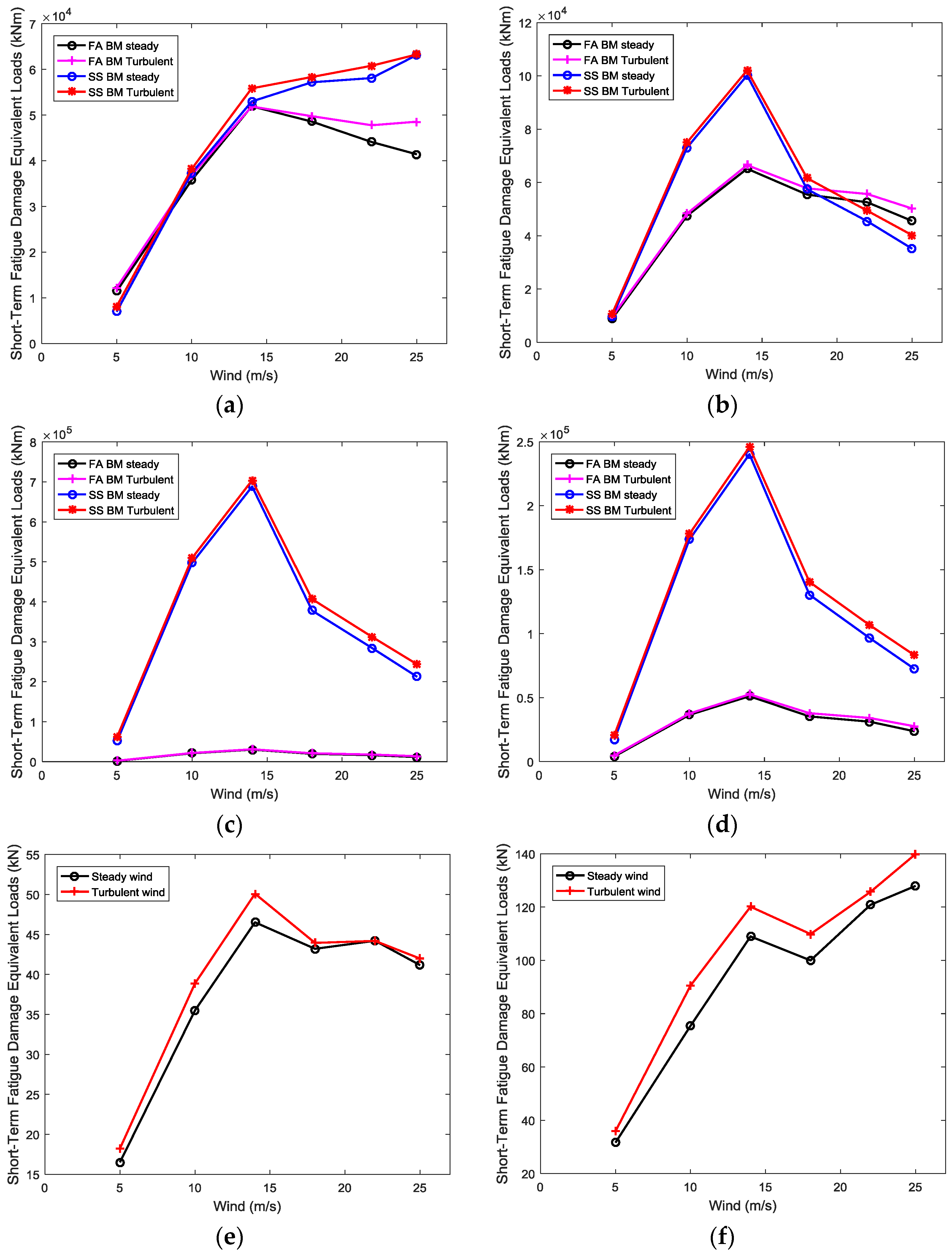
The platform global motions and the structural responses of flexible components of the FVAWTs were studied in a systematic manner under normal operating condition. Furthermore, the fatigue analysis of flexible components such as blades, tower and mooring lines were performed based on the time history of calculated responses considering the continuously varying aerodynamic loads on the rotor which leads to higher load level of the fatigue loads and number of load cycles. The rainflow counting technique is used for short-term fatigue cycle counting. The Mlife tool from NREL is used to calculate the short-term fatigue damage equivalent loads for the FVAWT.
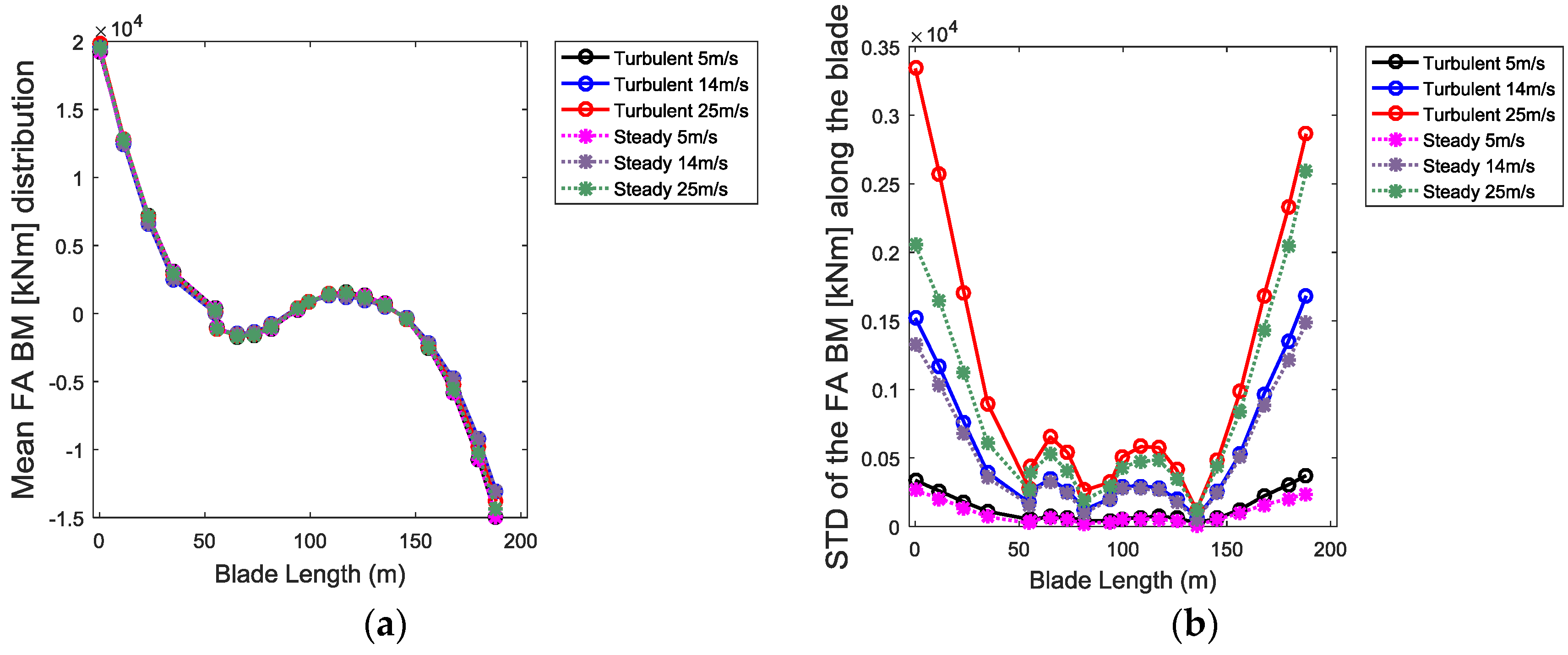
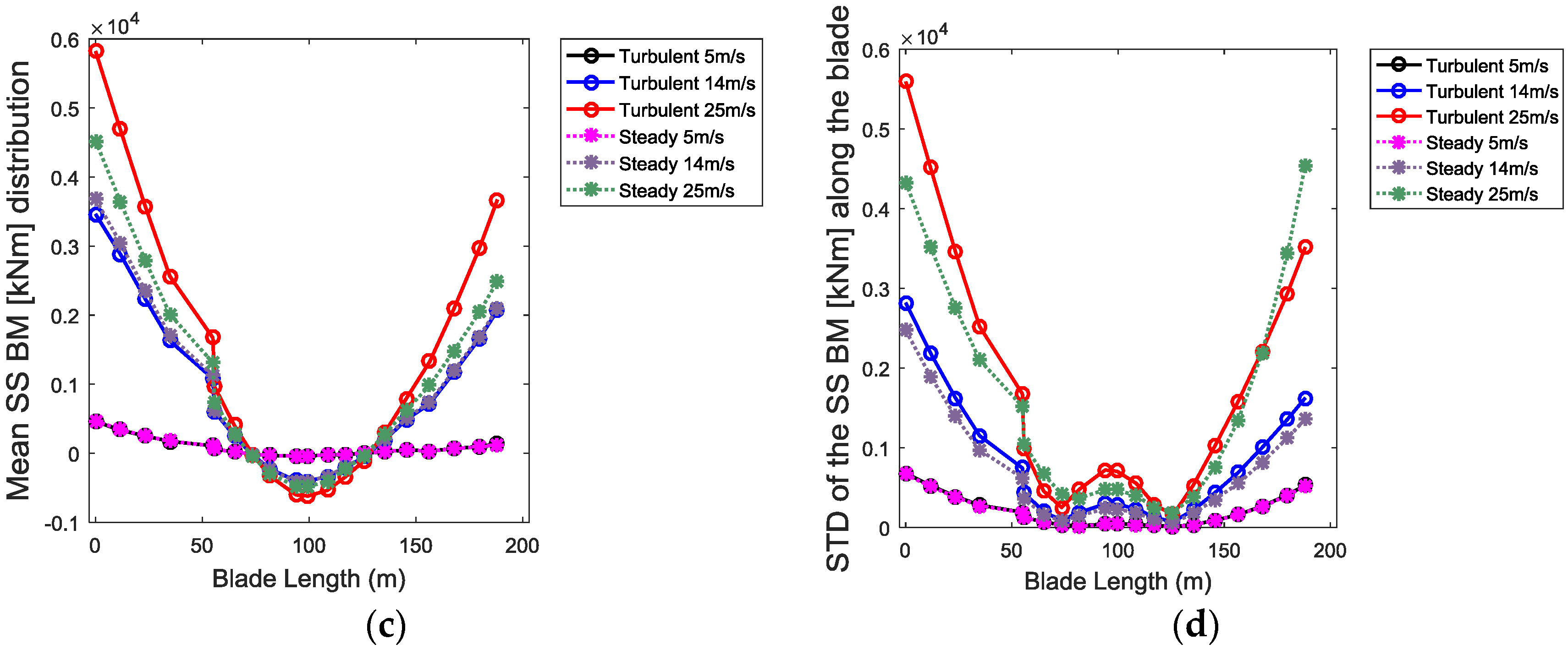
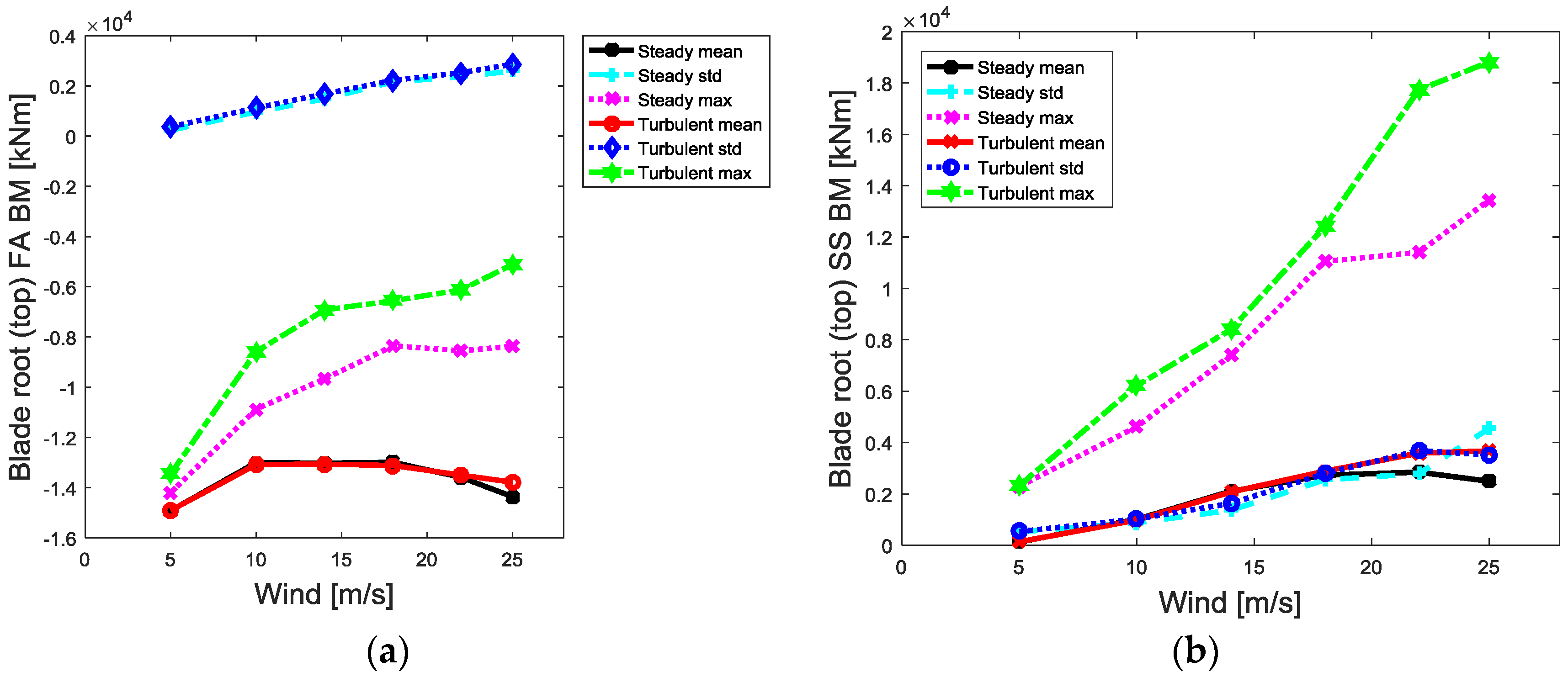
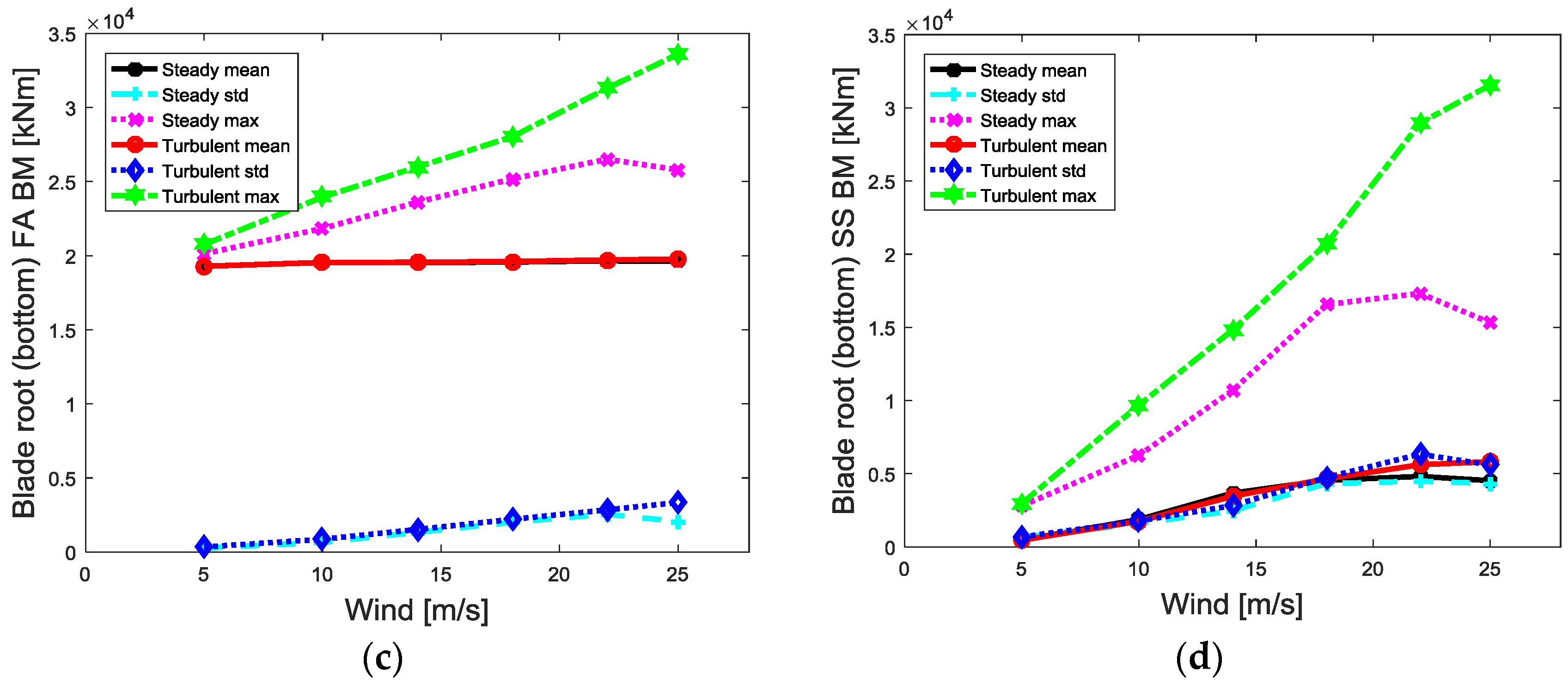
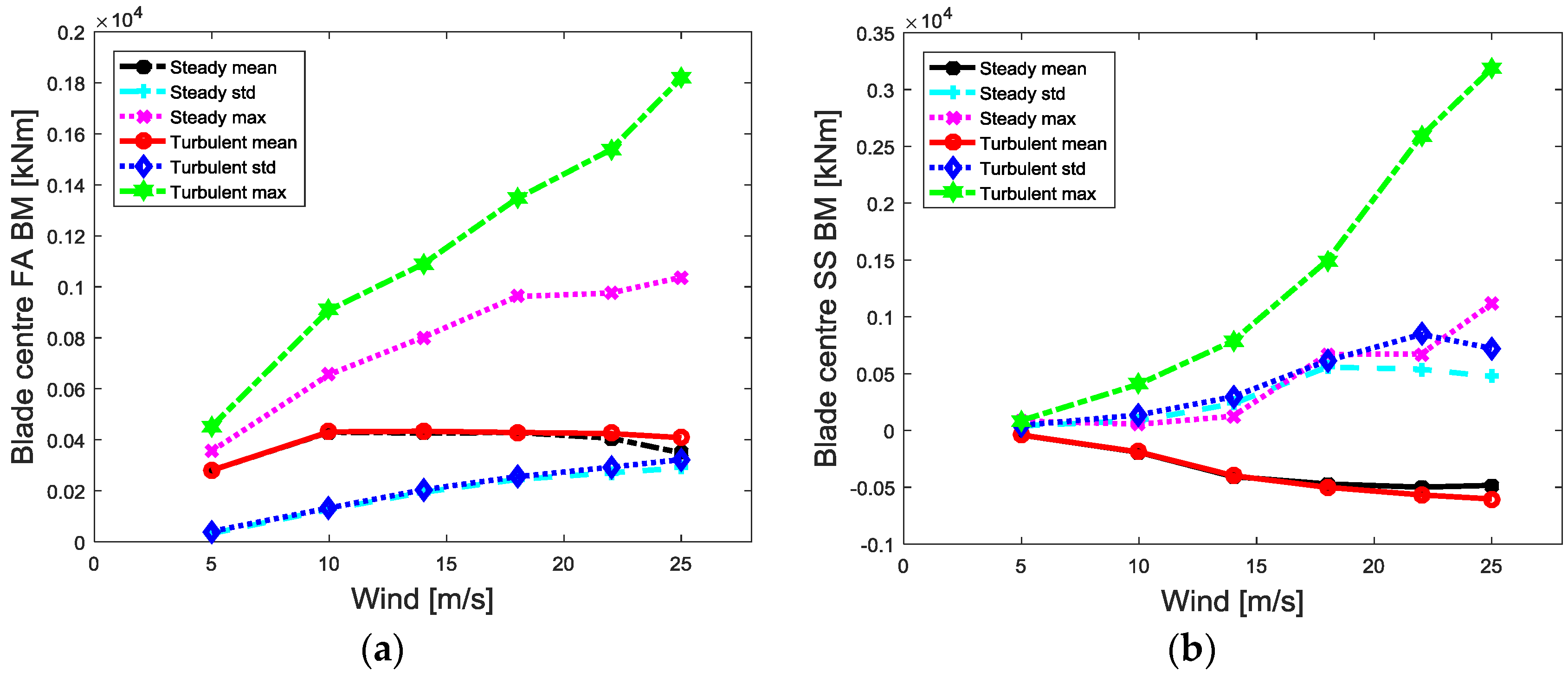
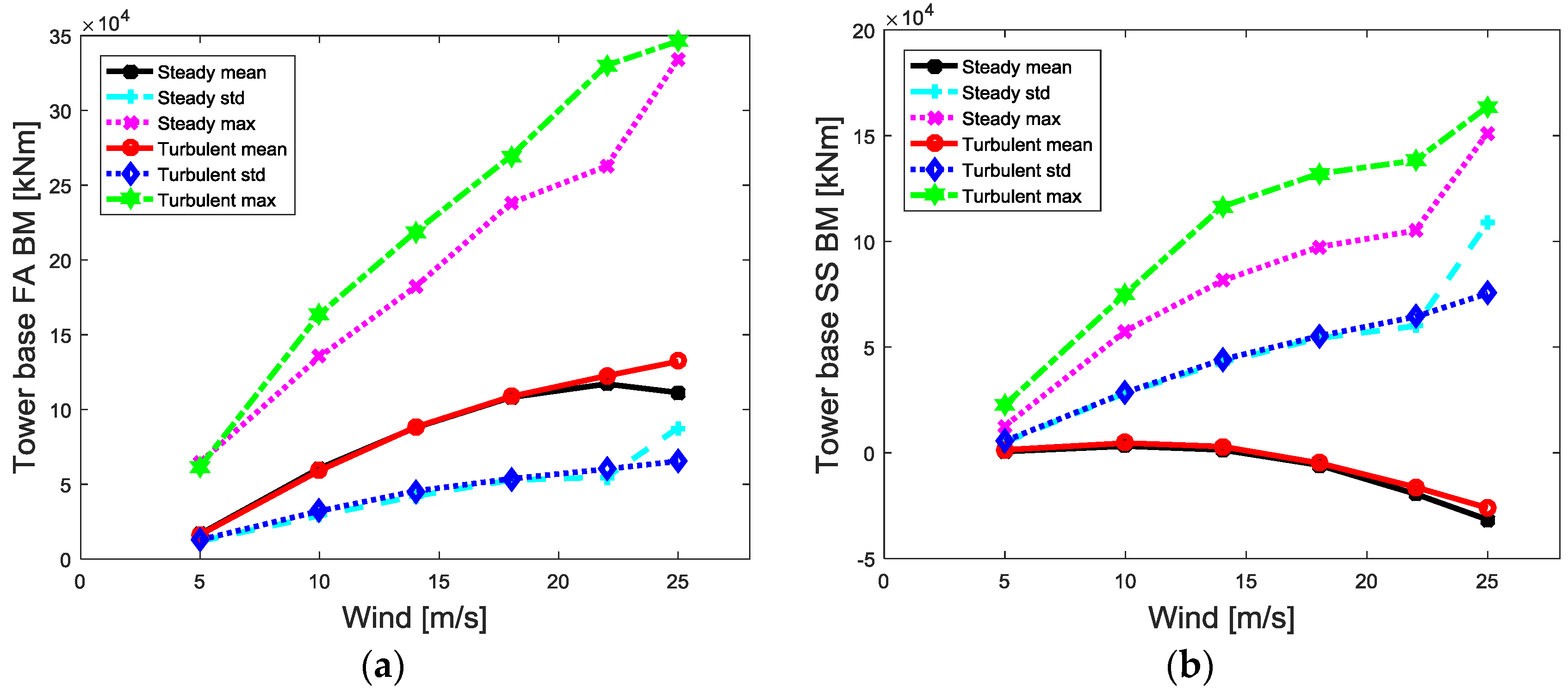
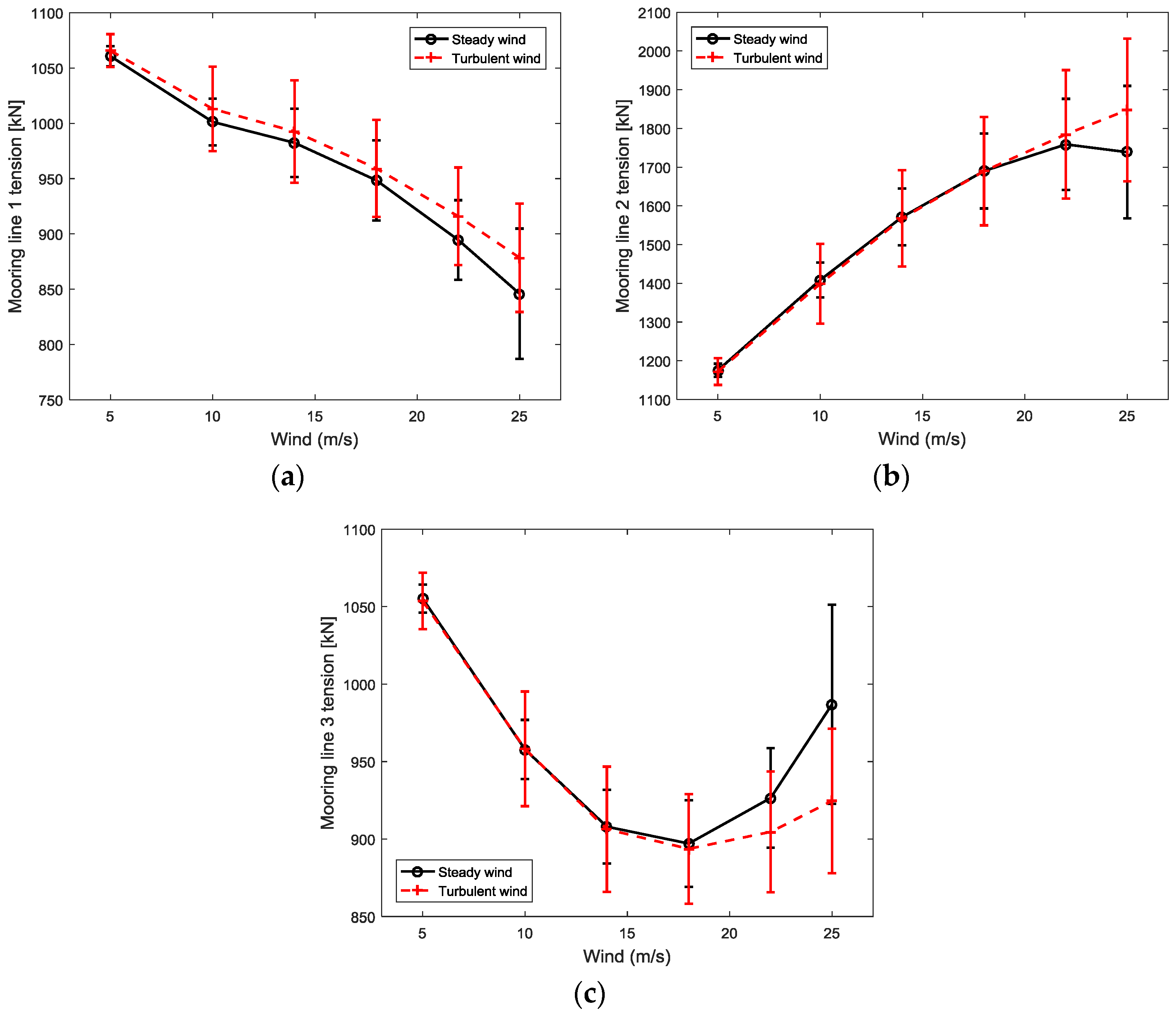
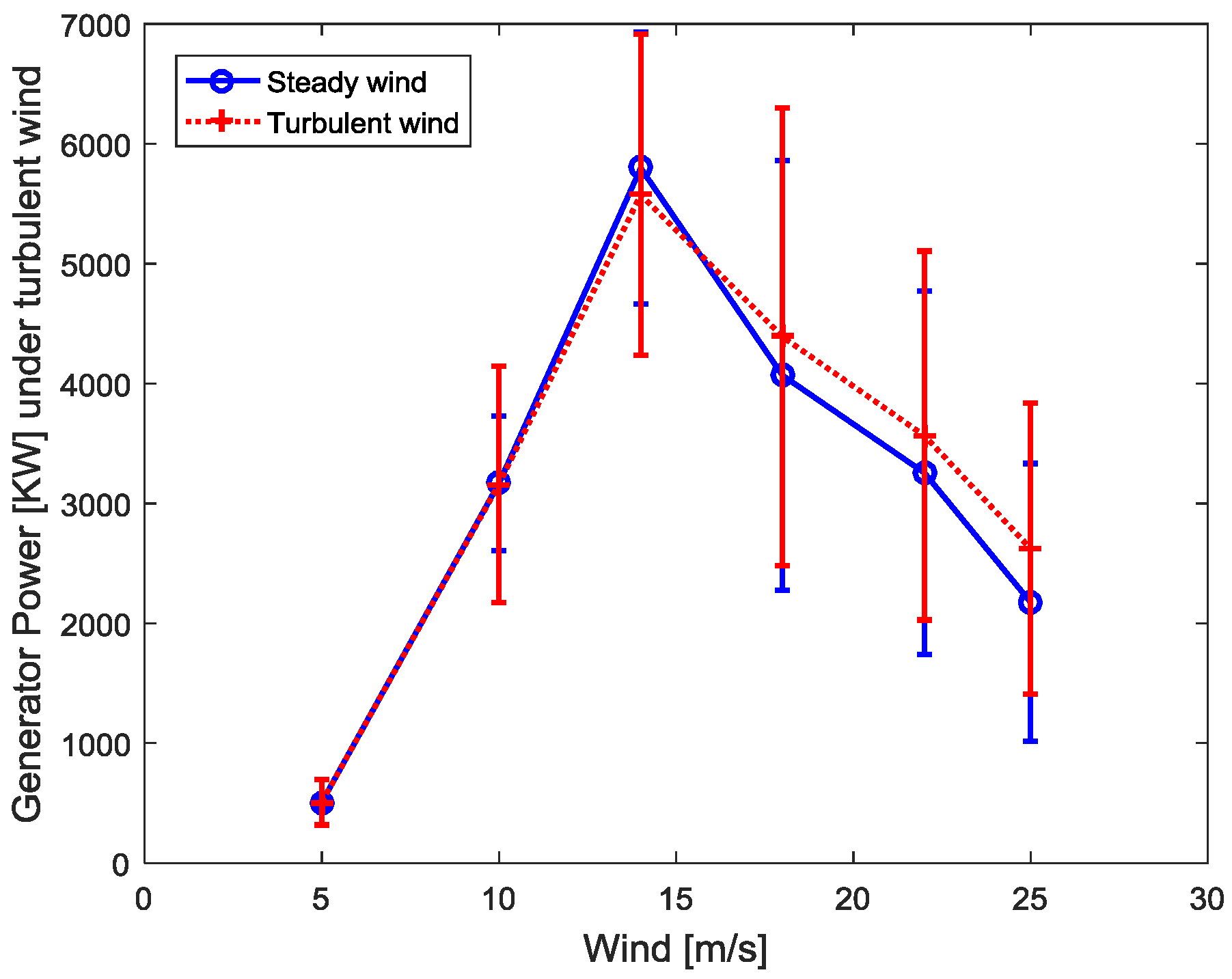
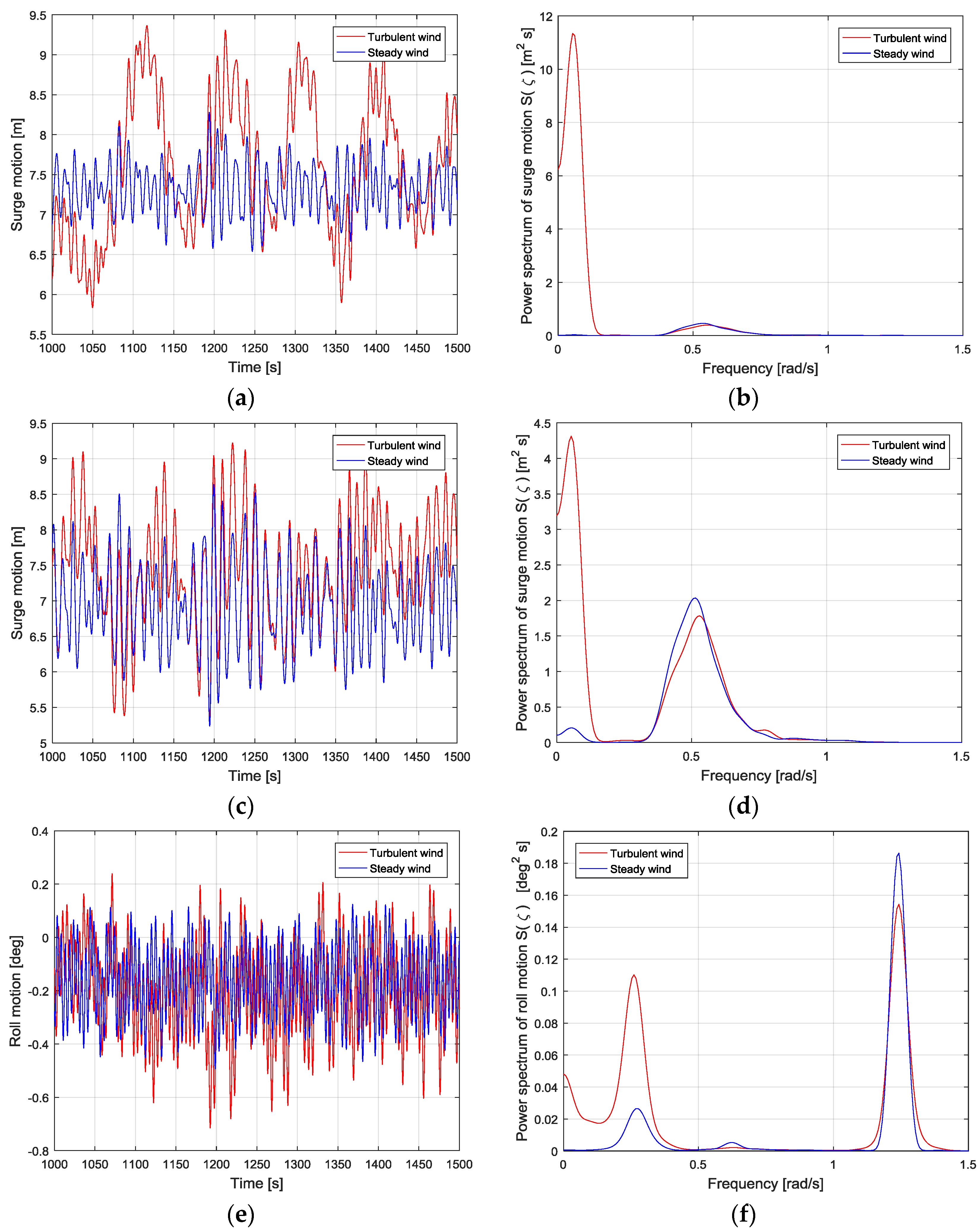
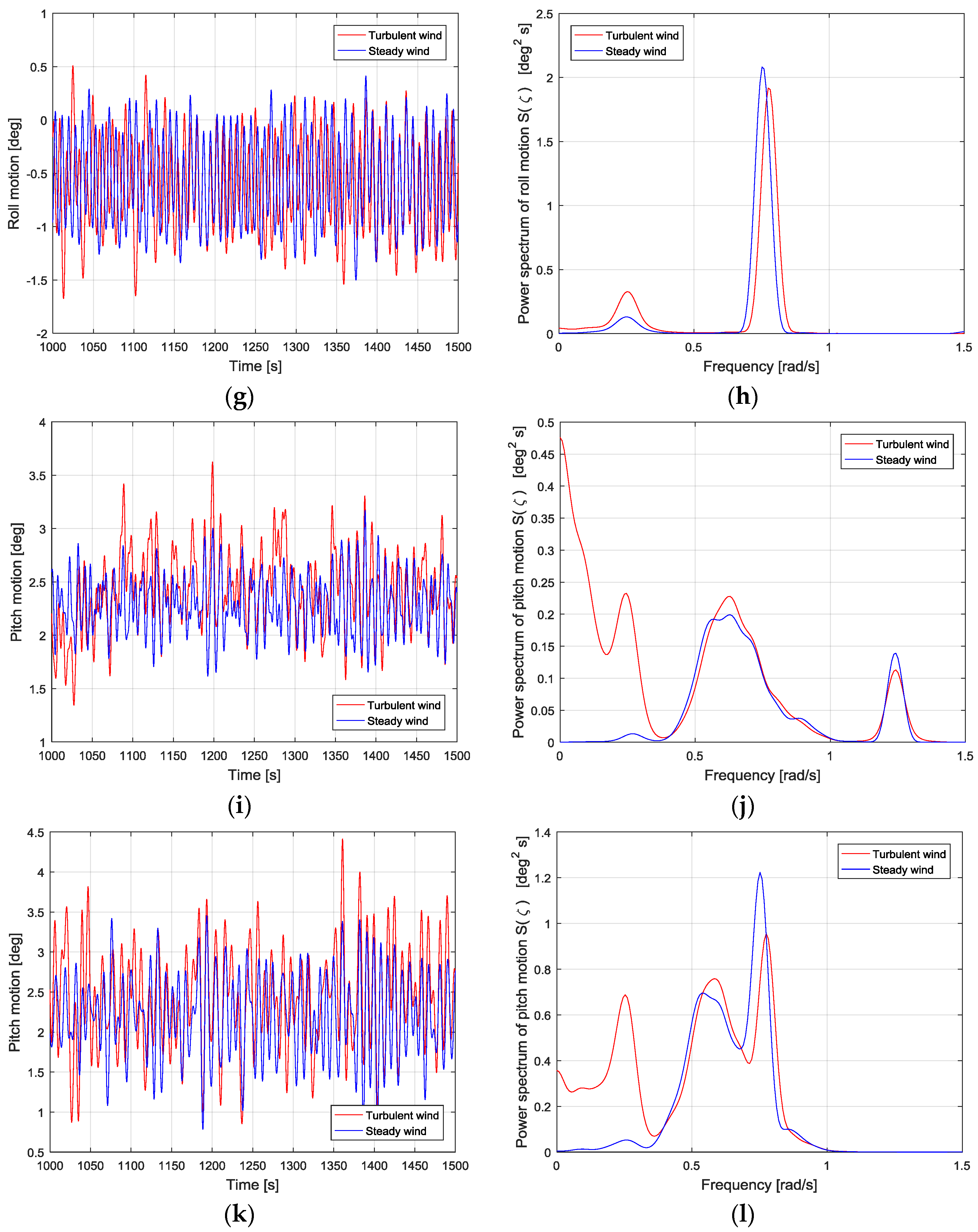
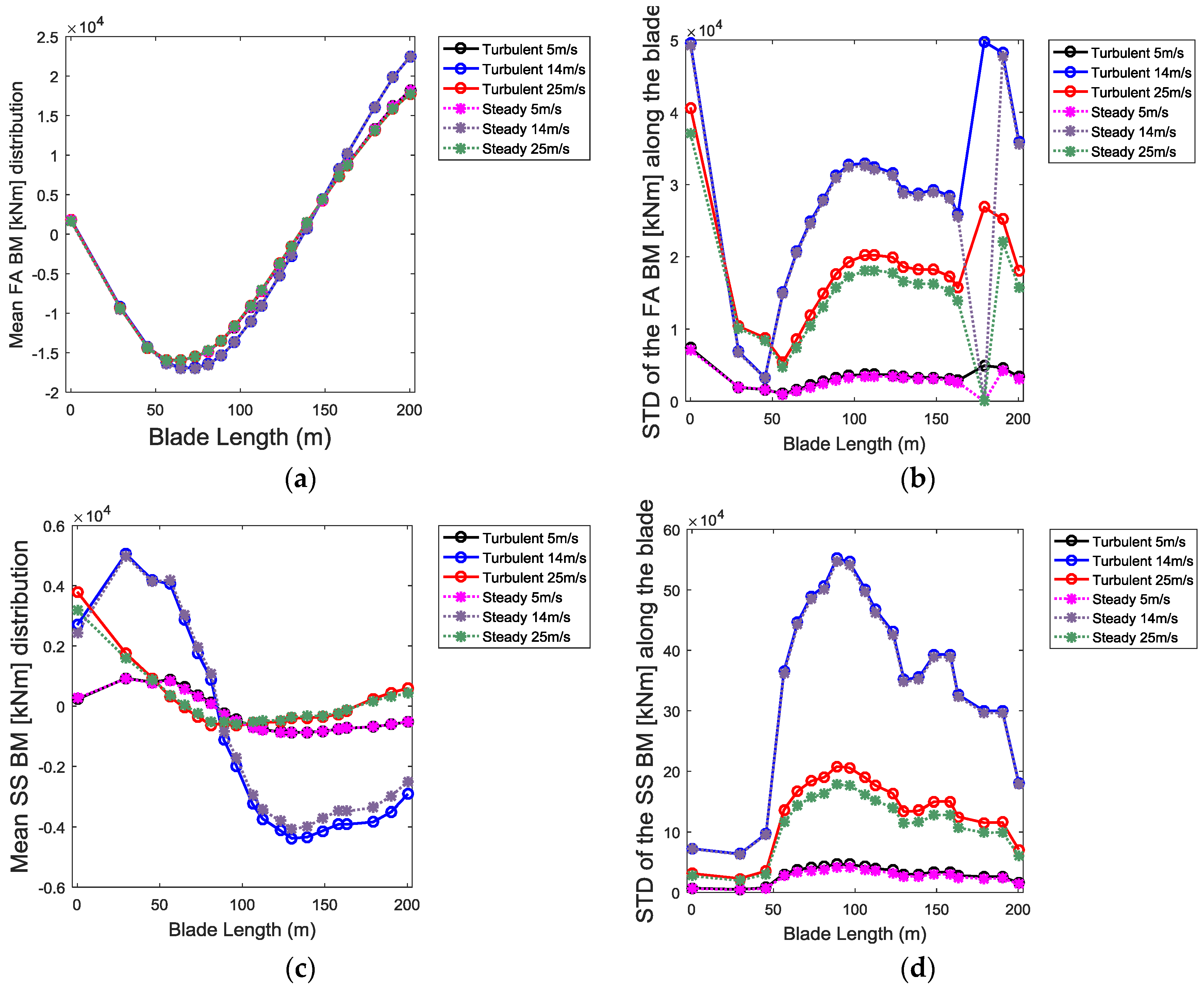
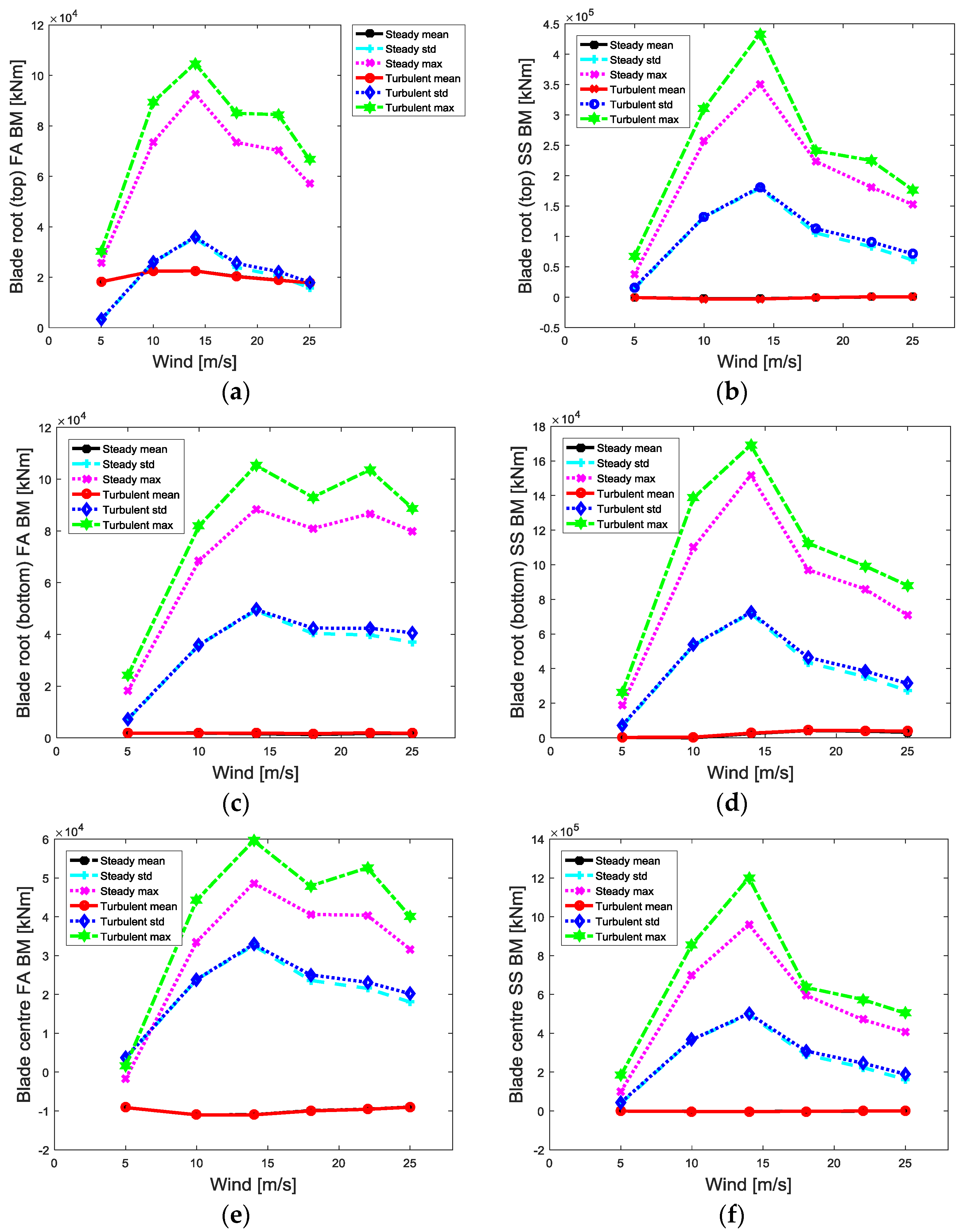
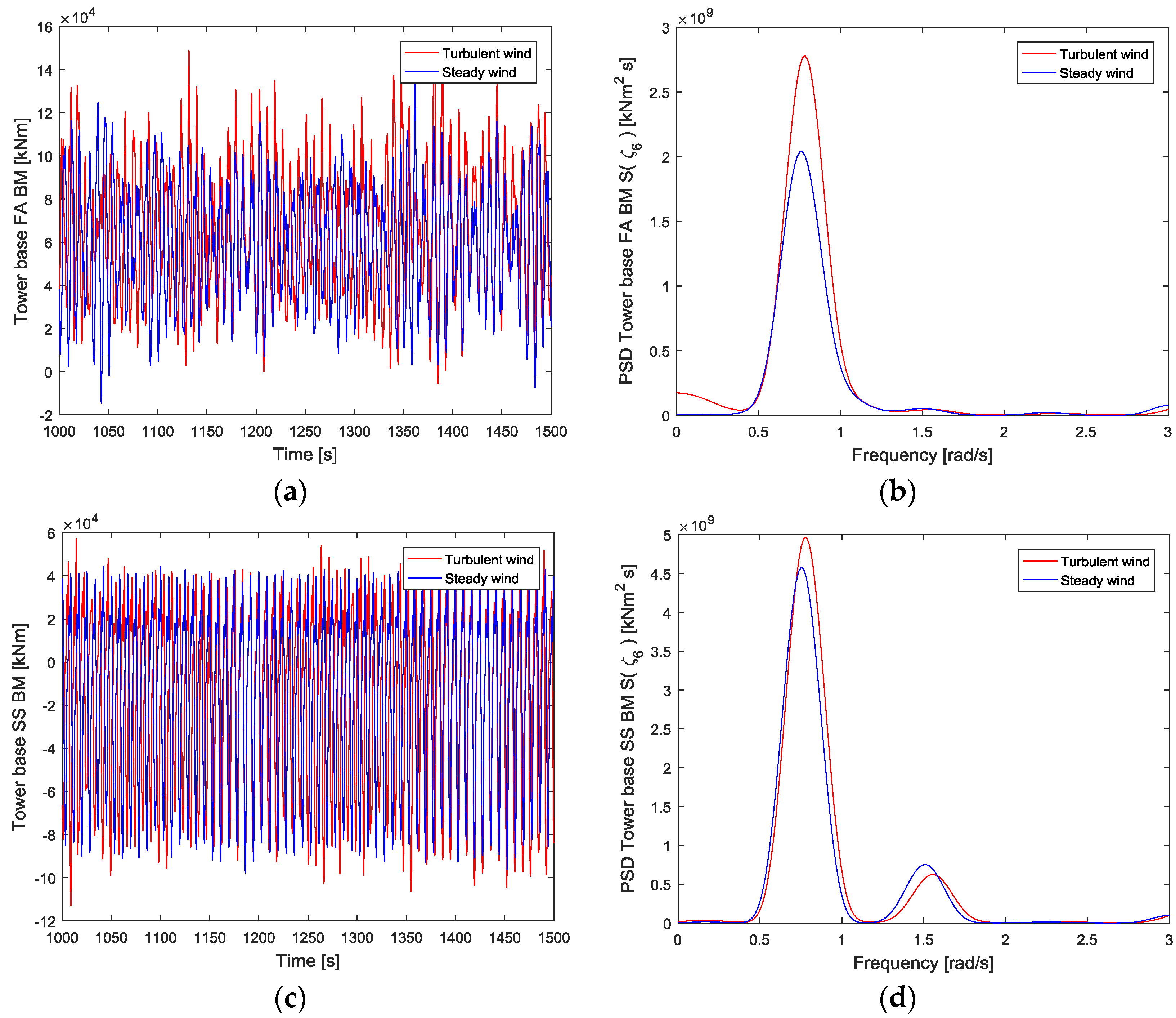
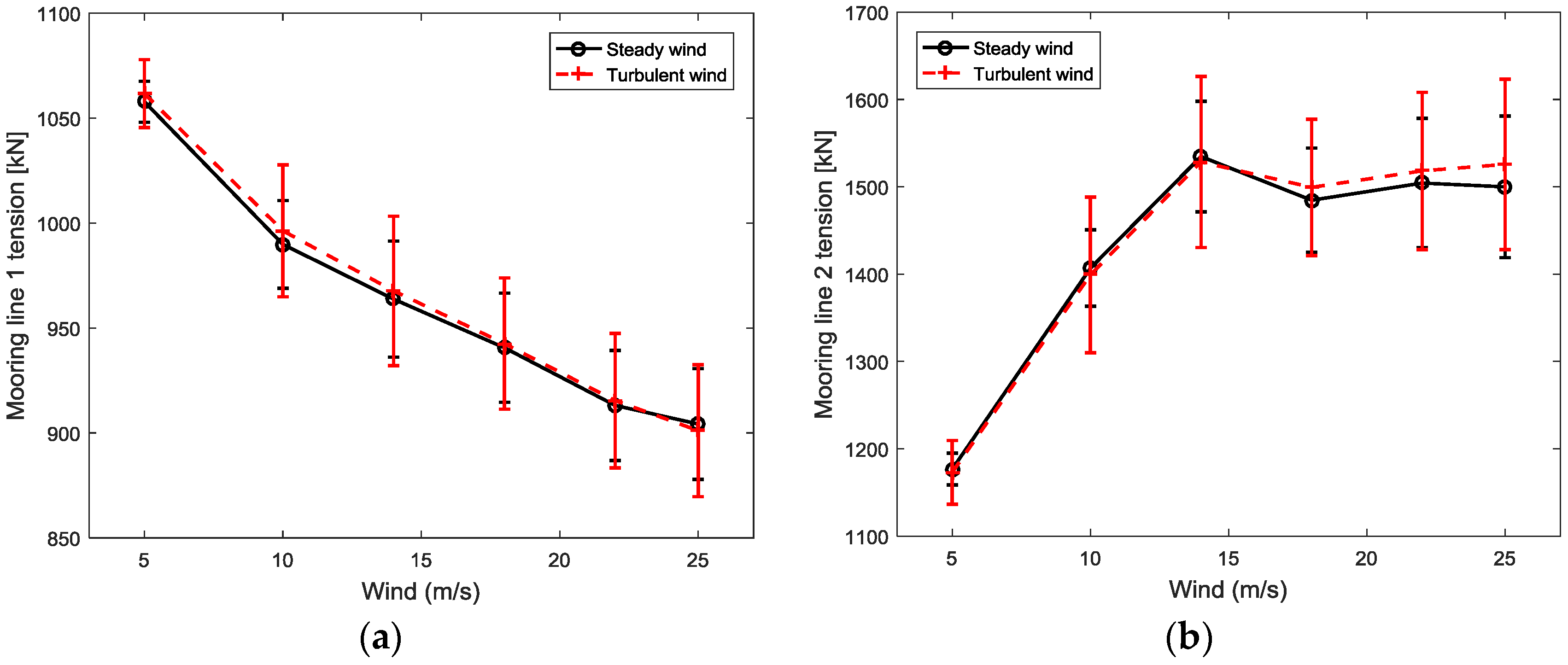
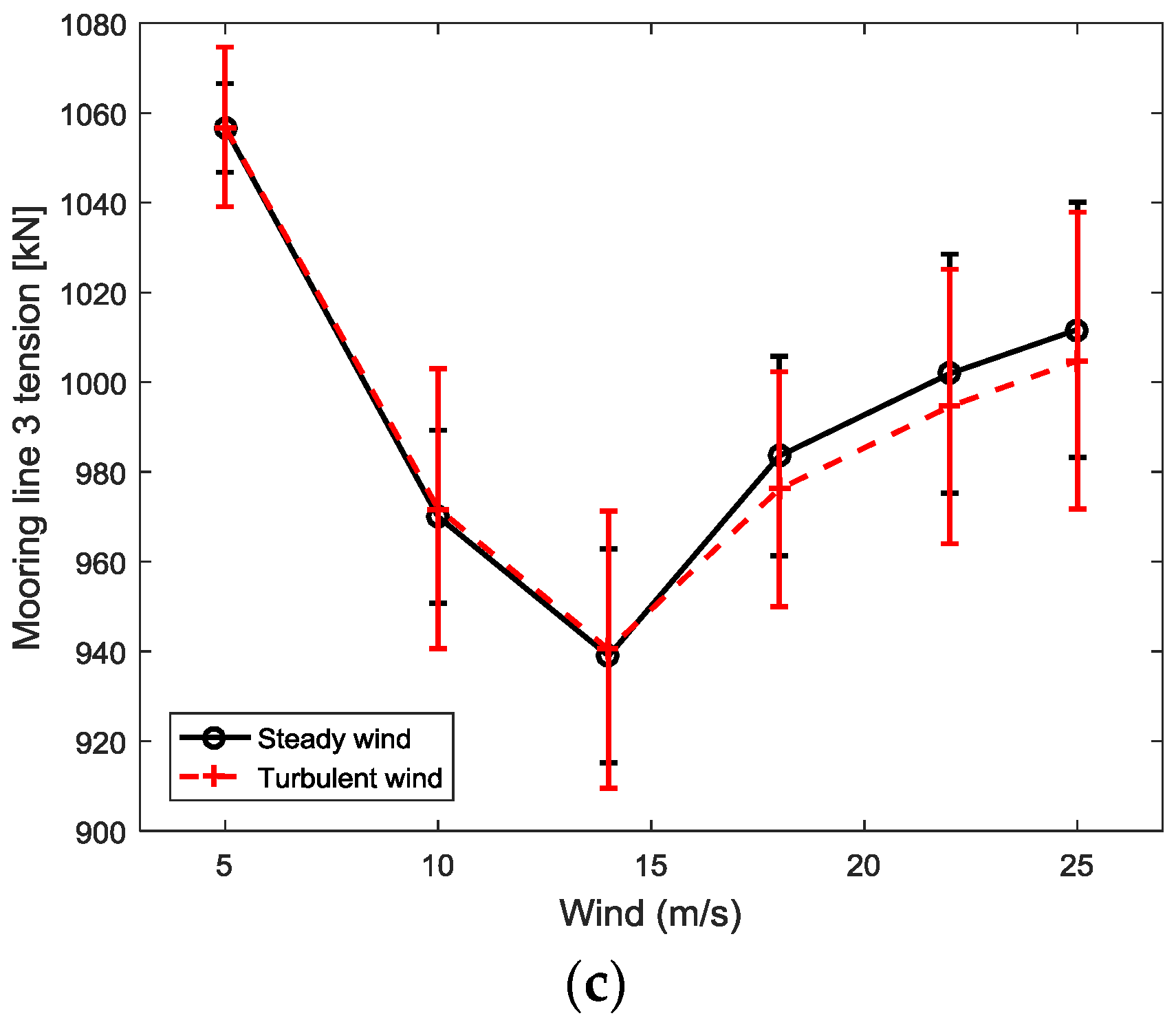
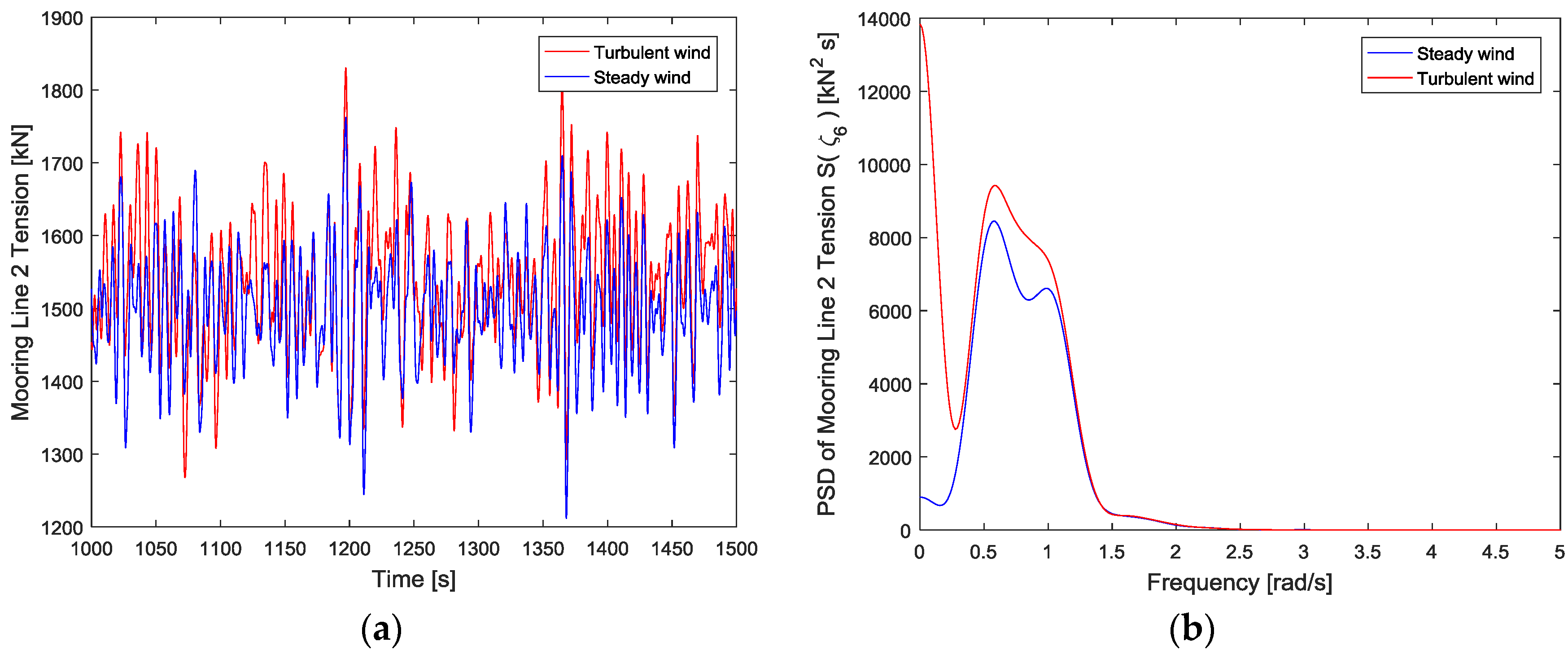
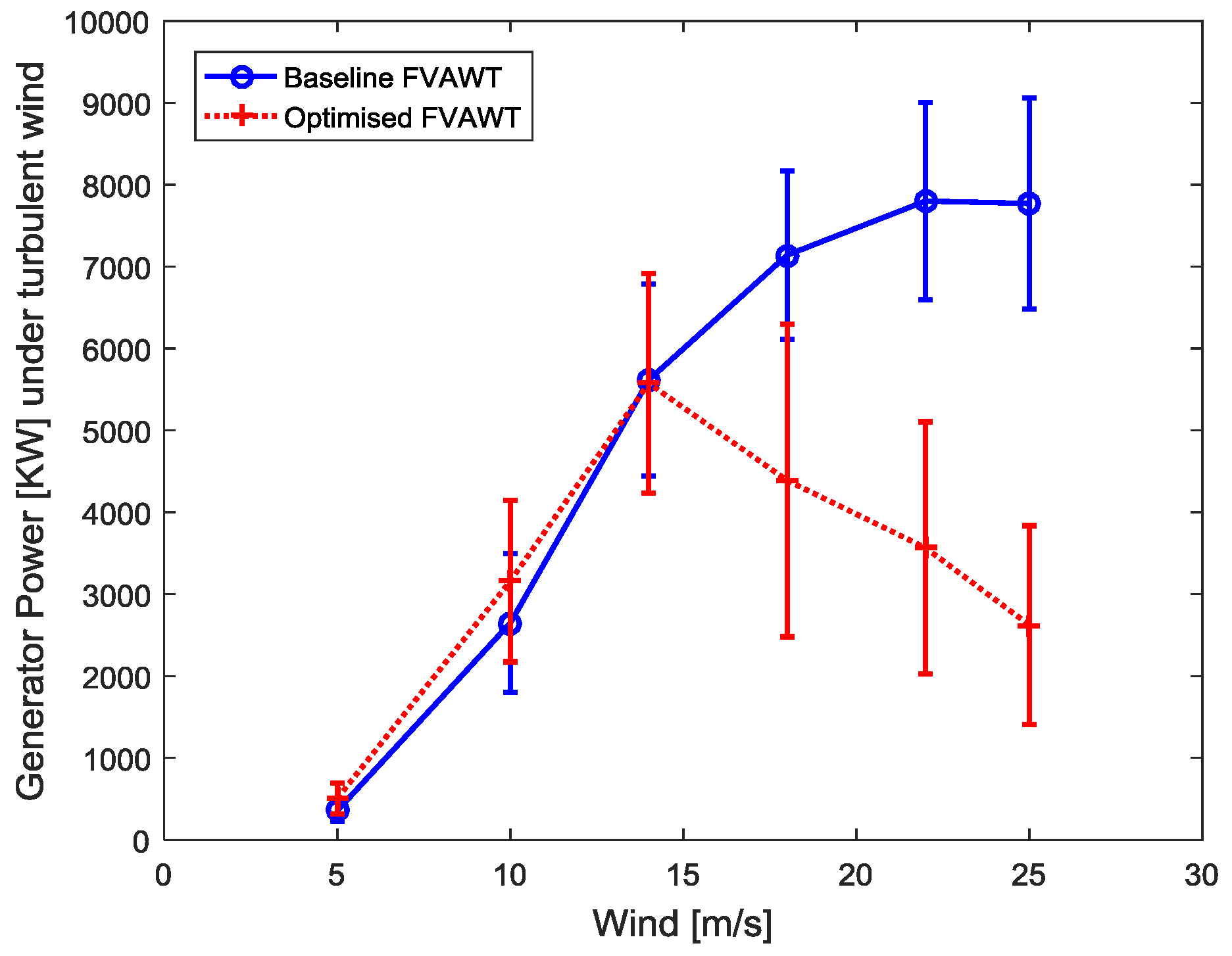
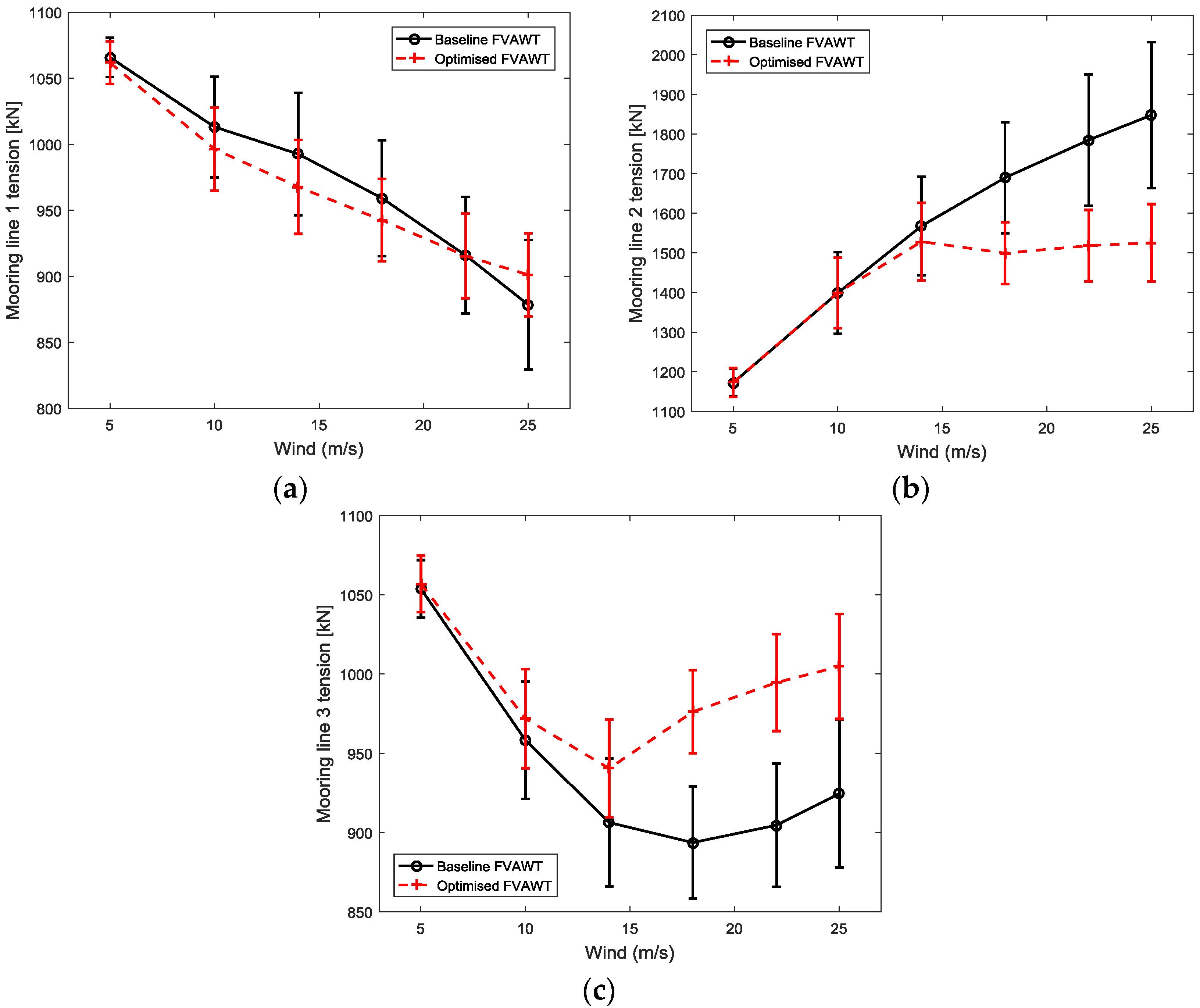
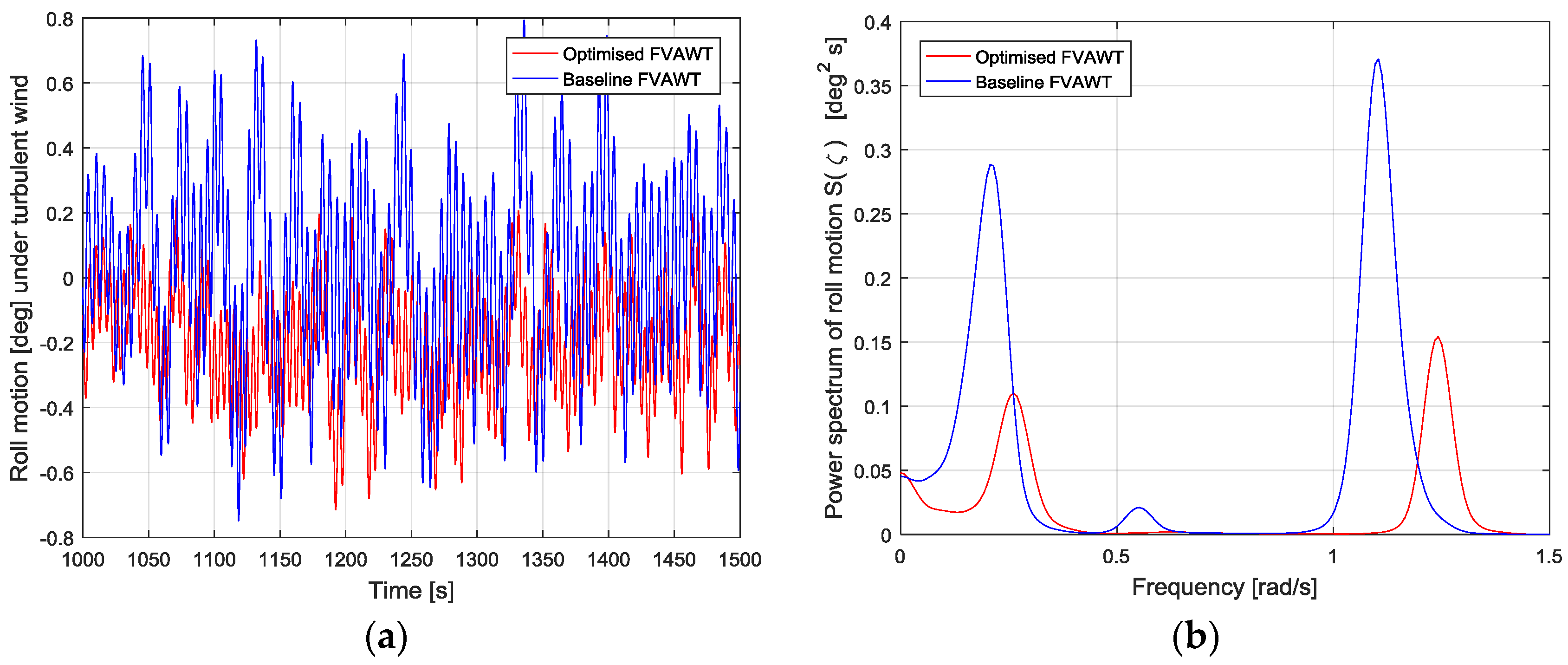
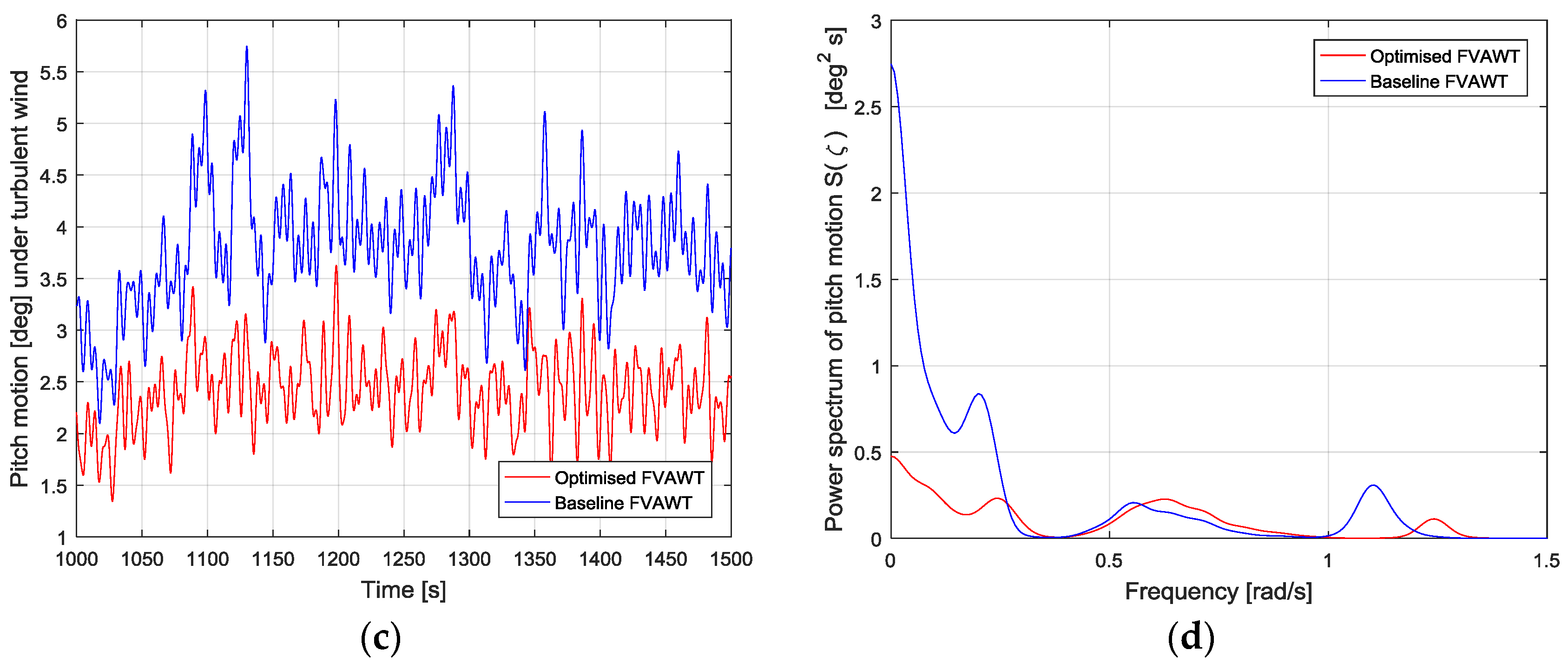
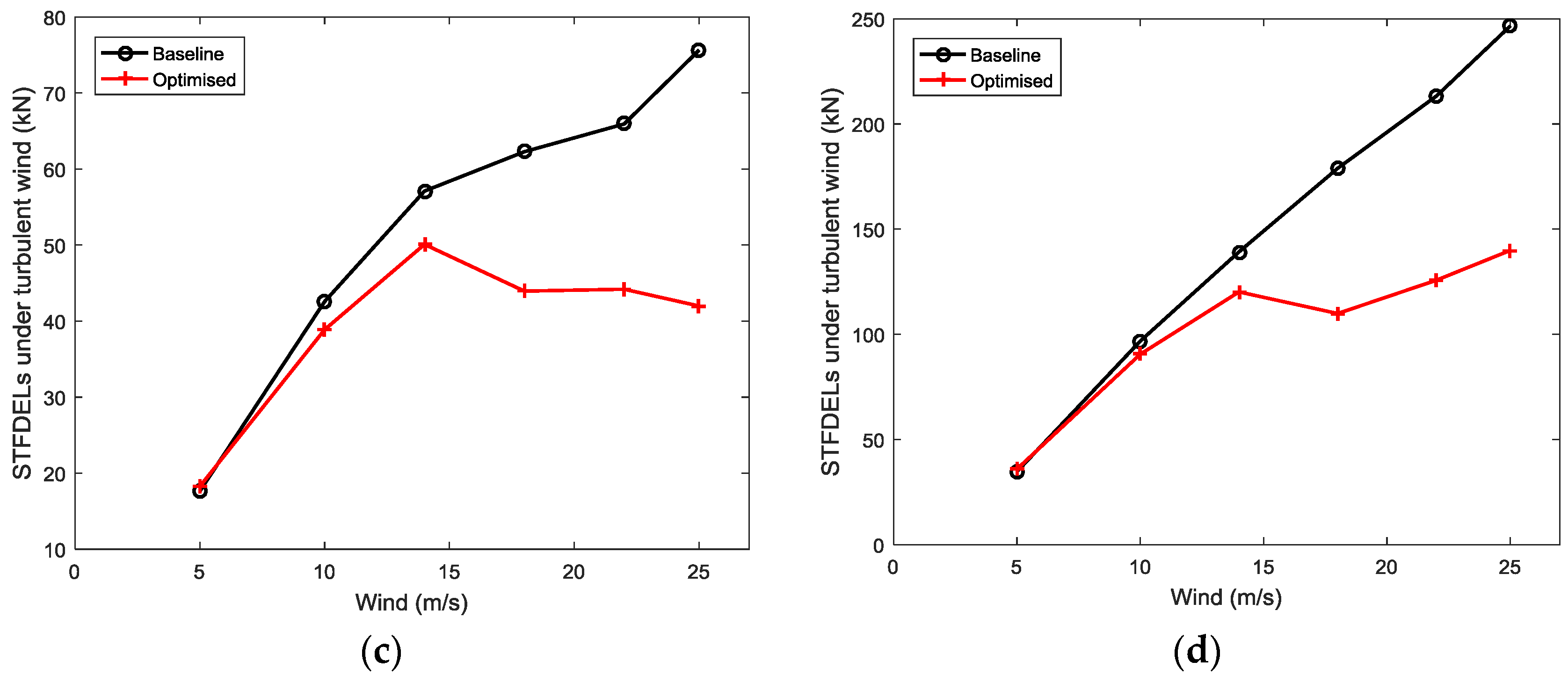
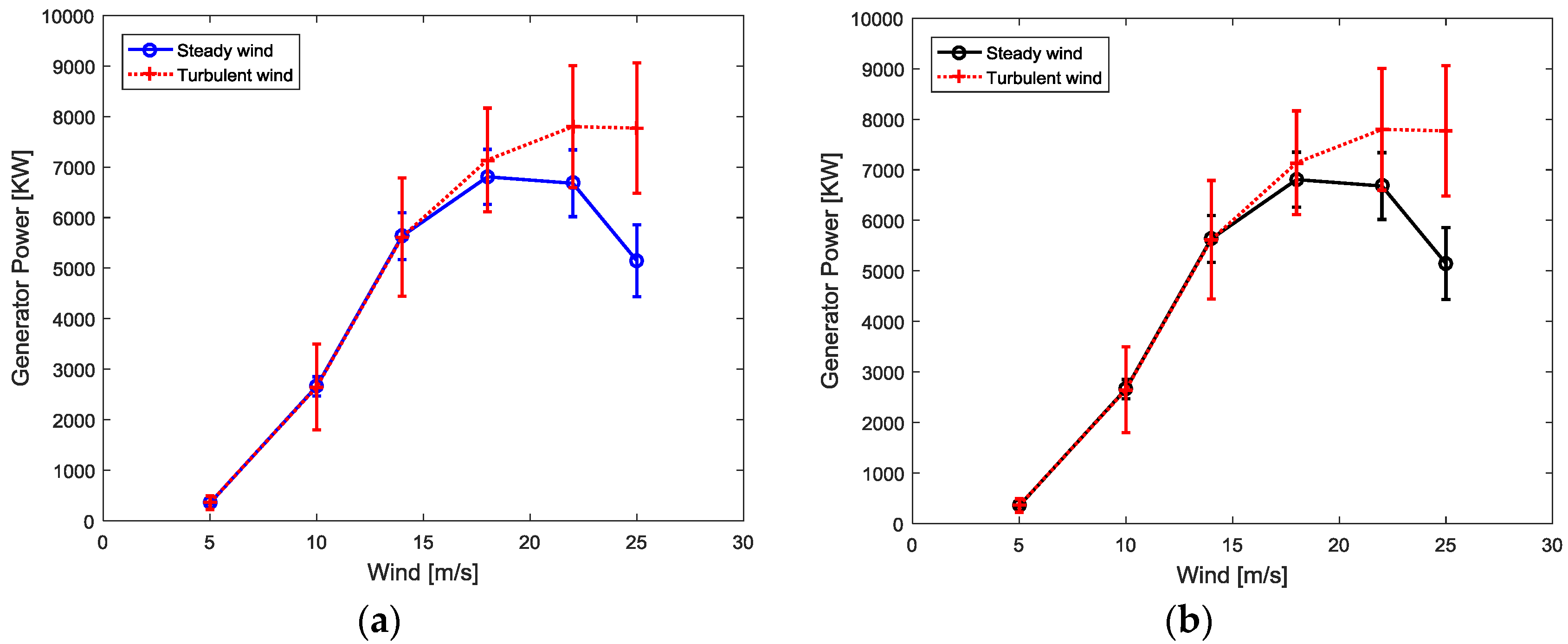
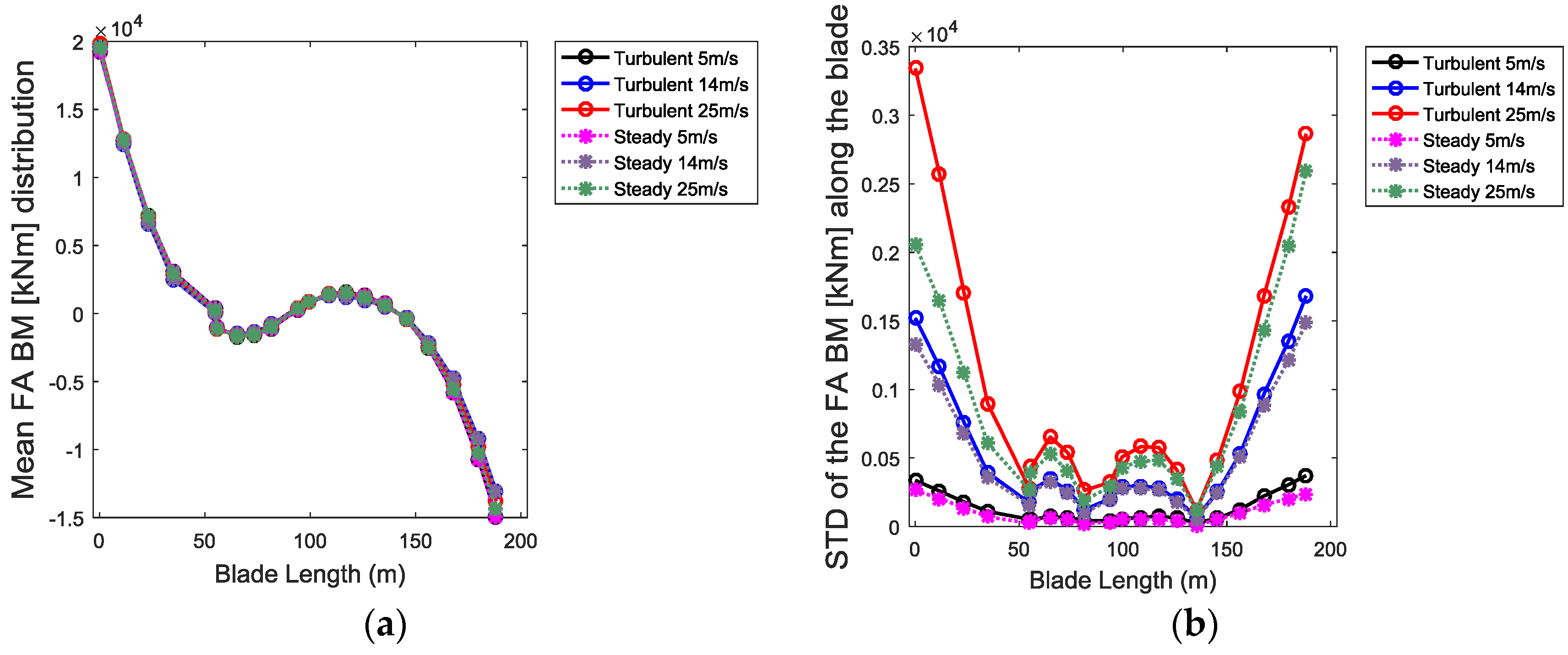
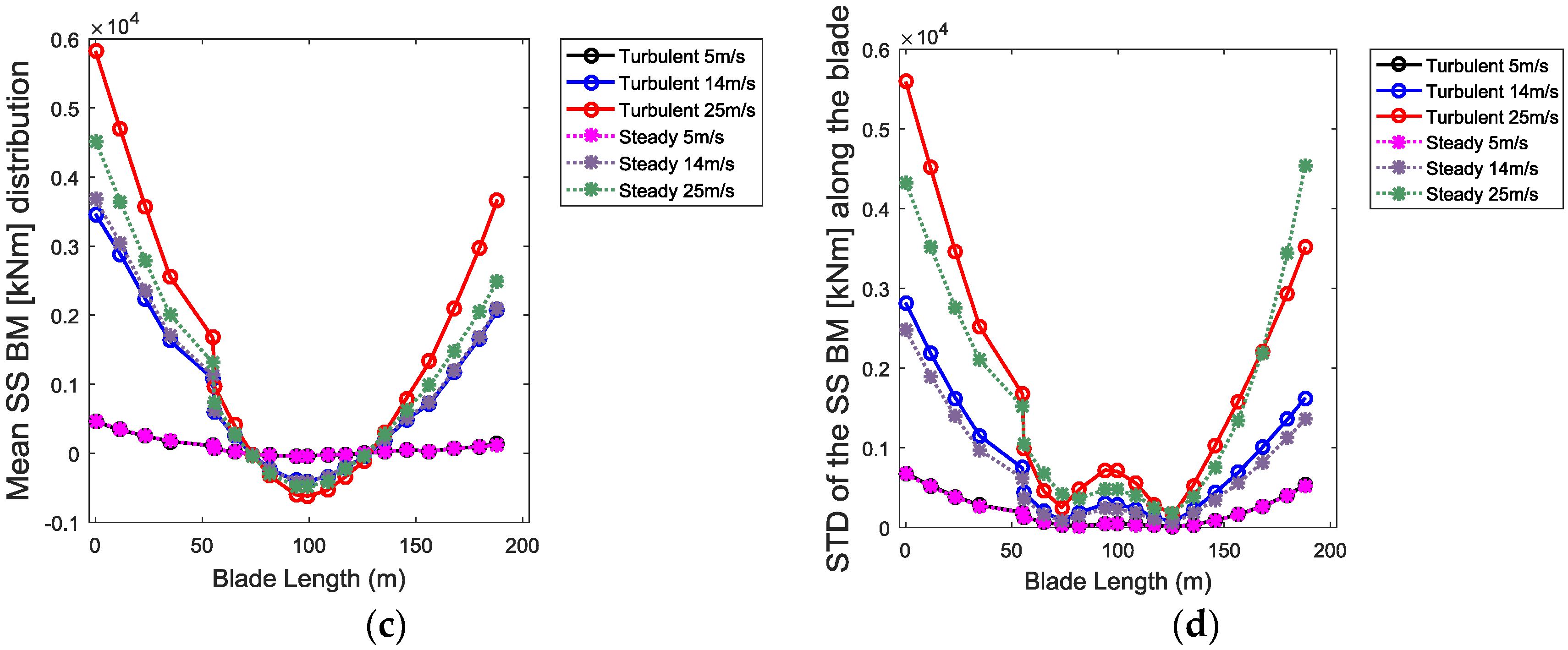
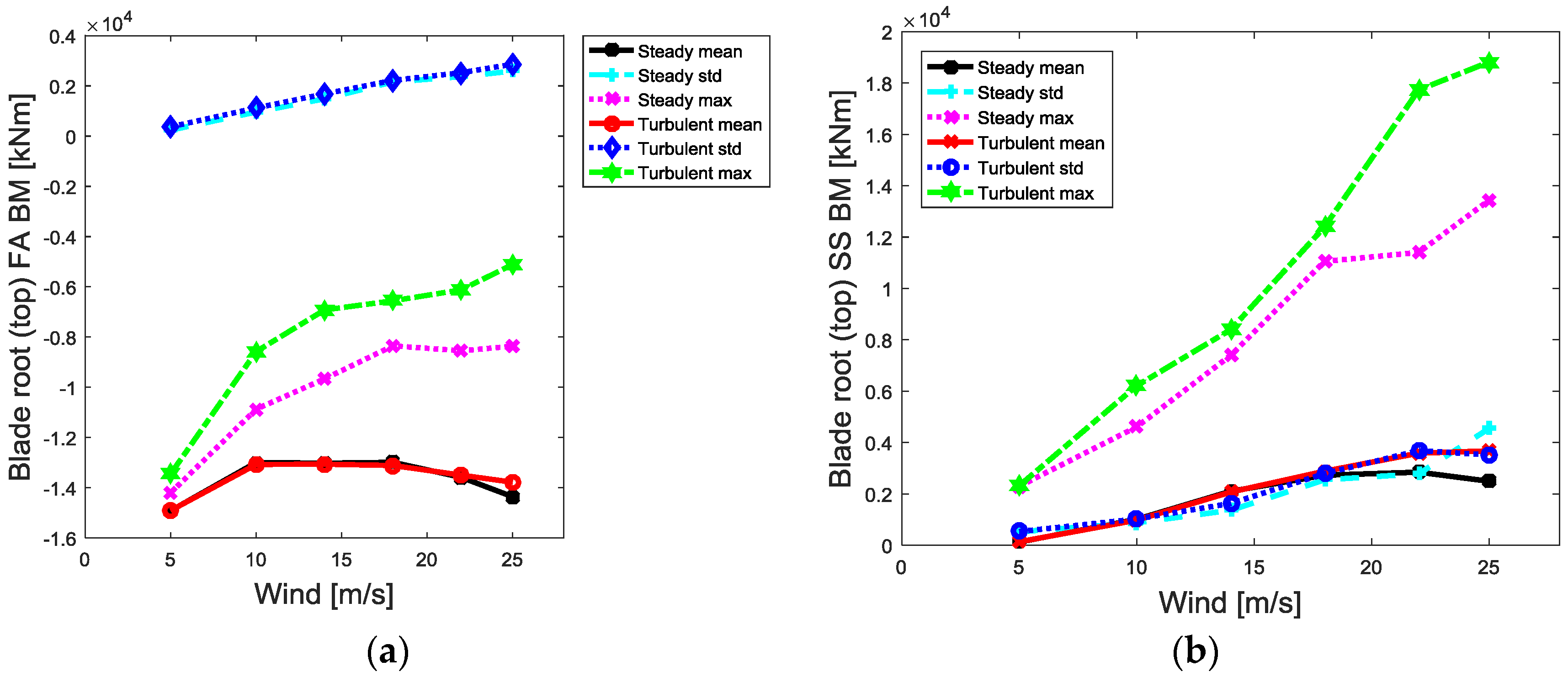
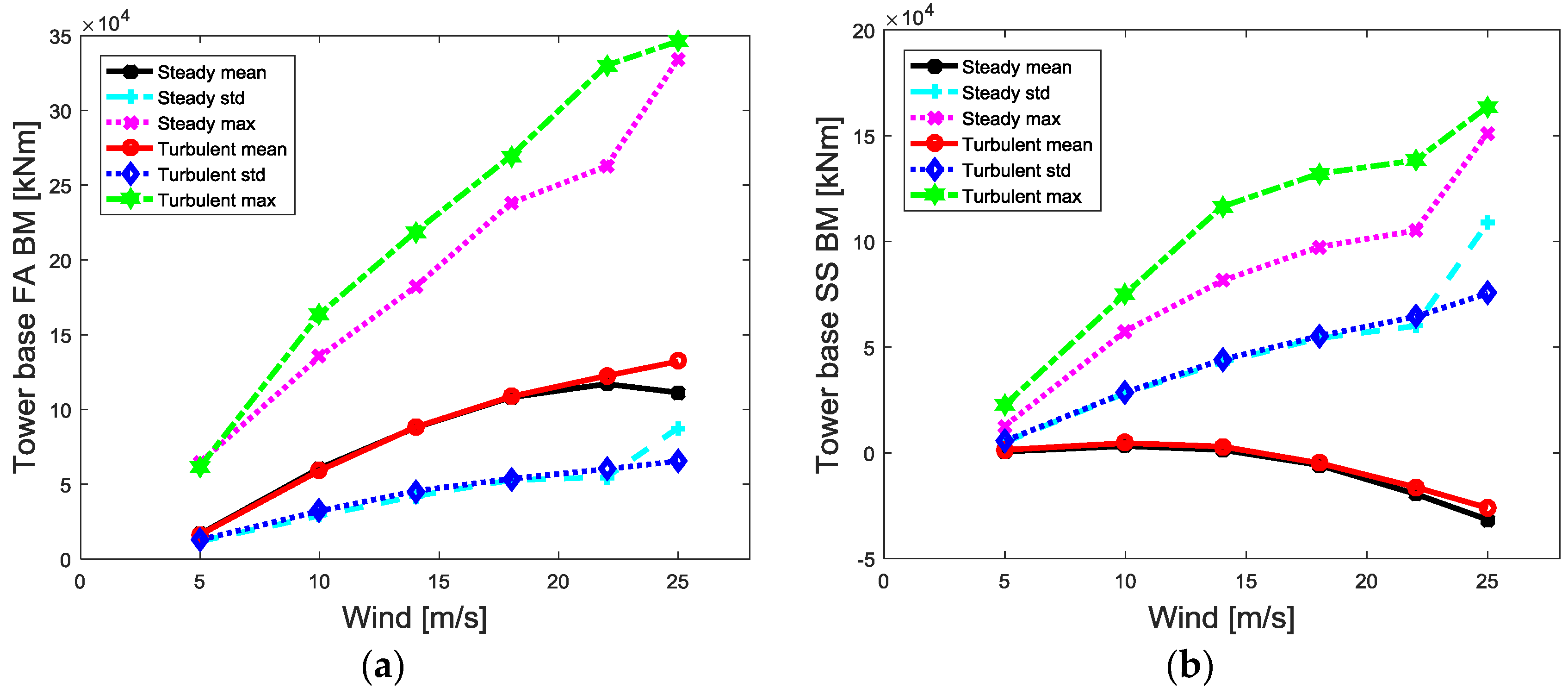
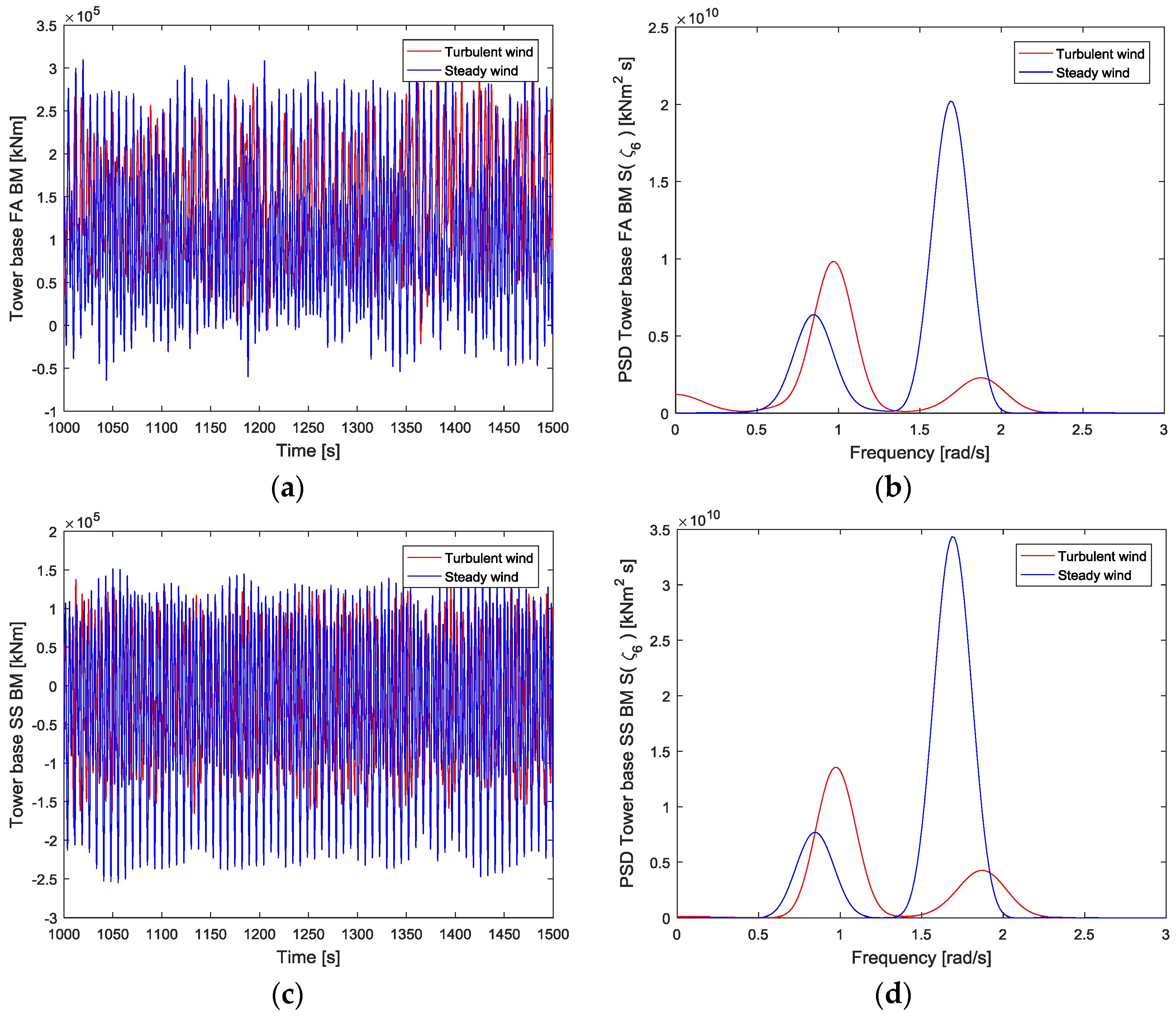
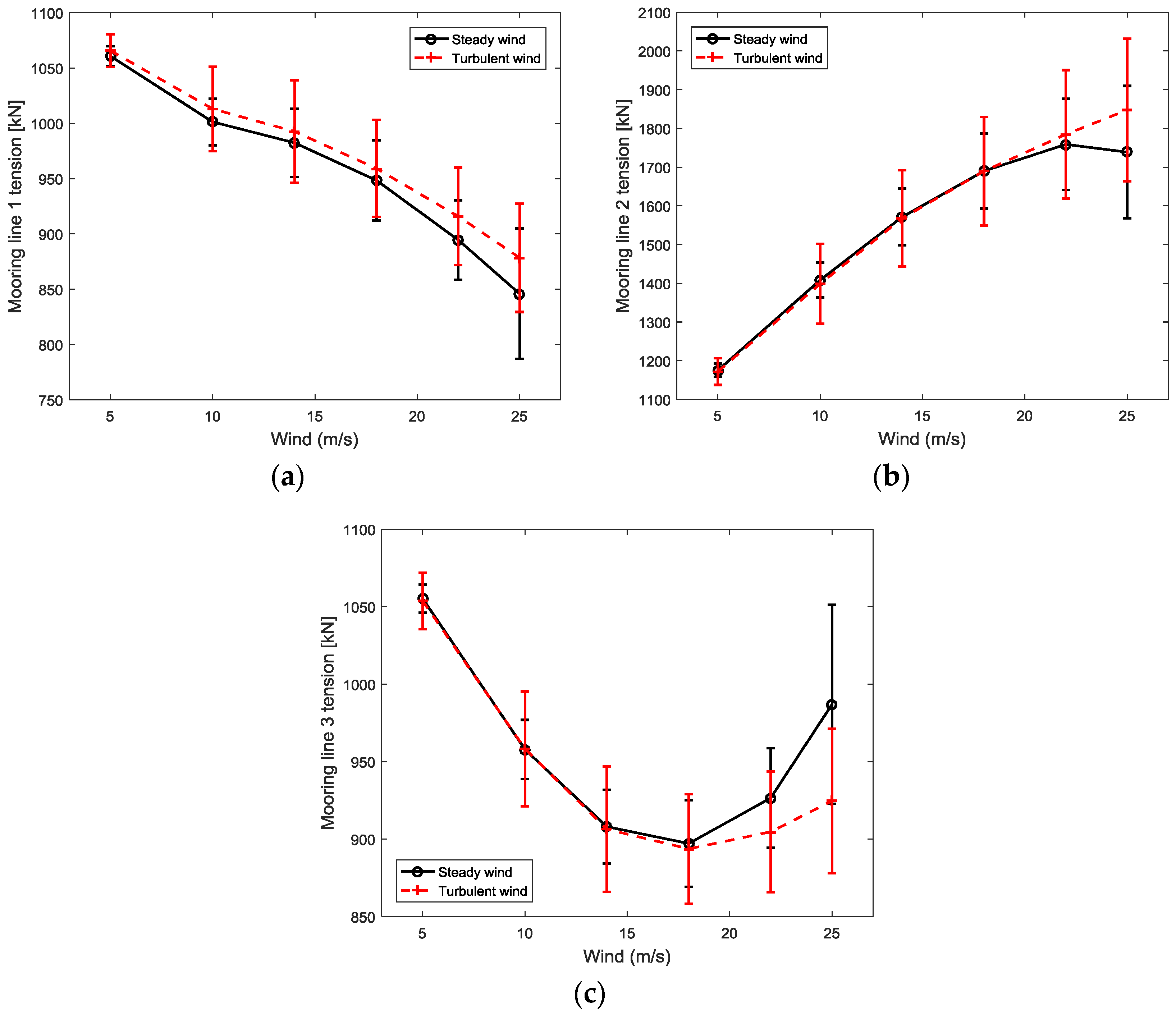
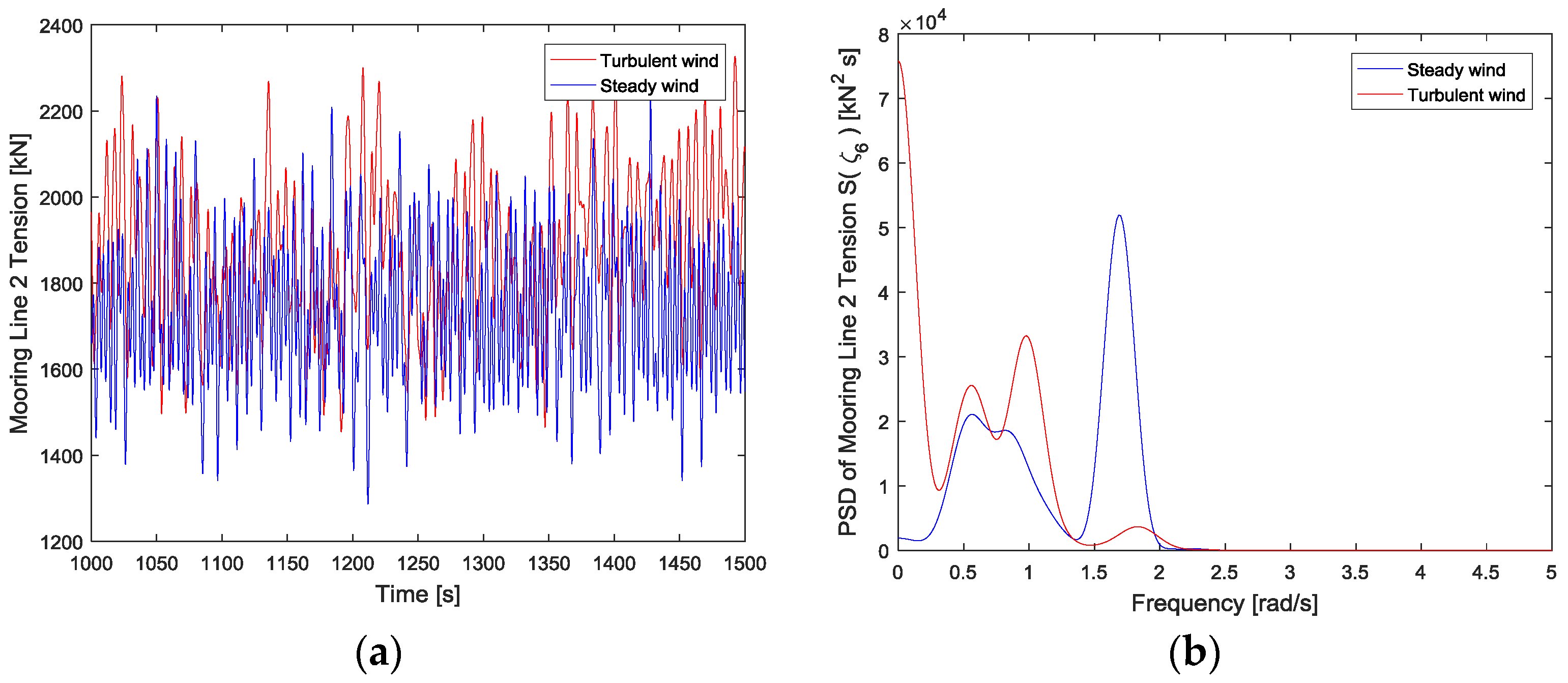
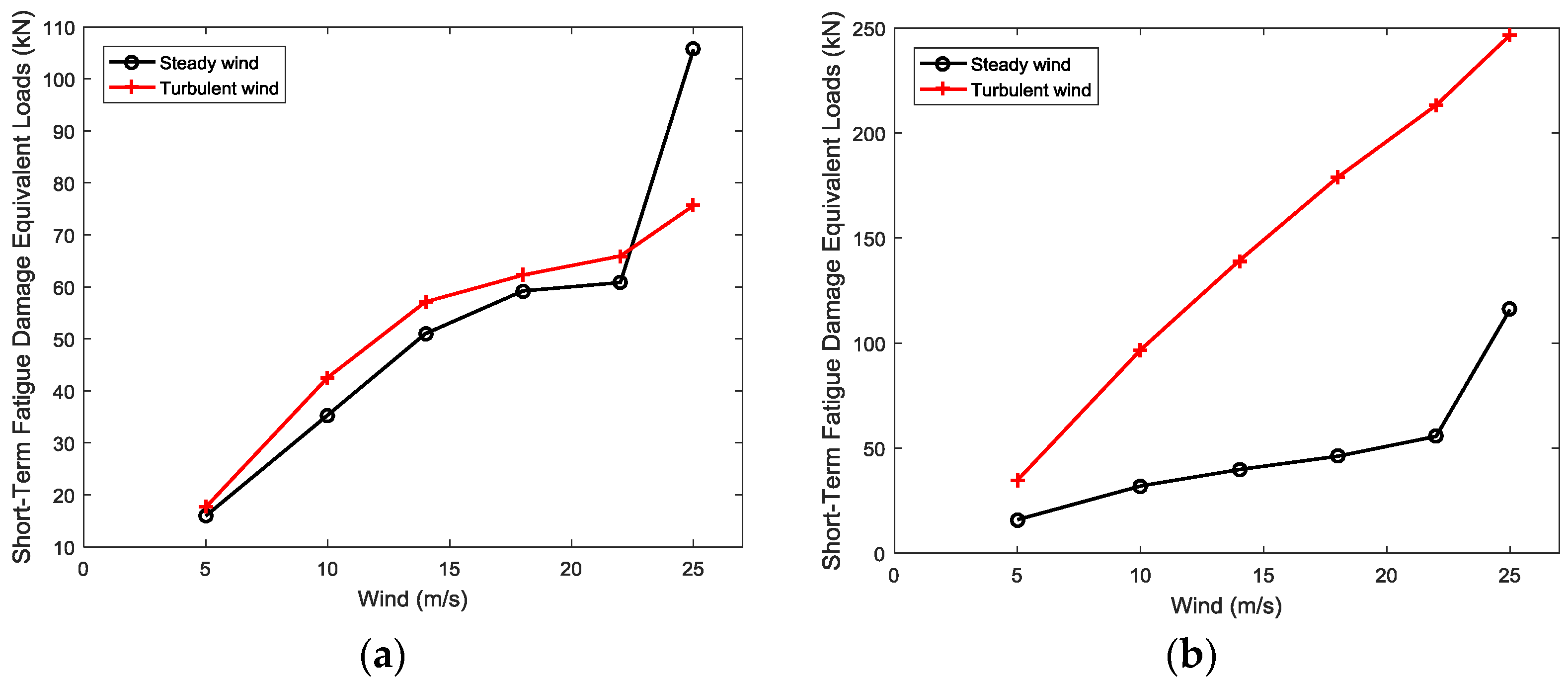
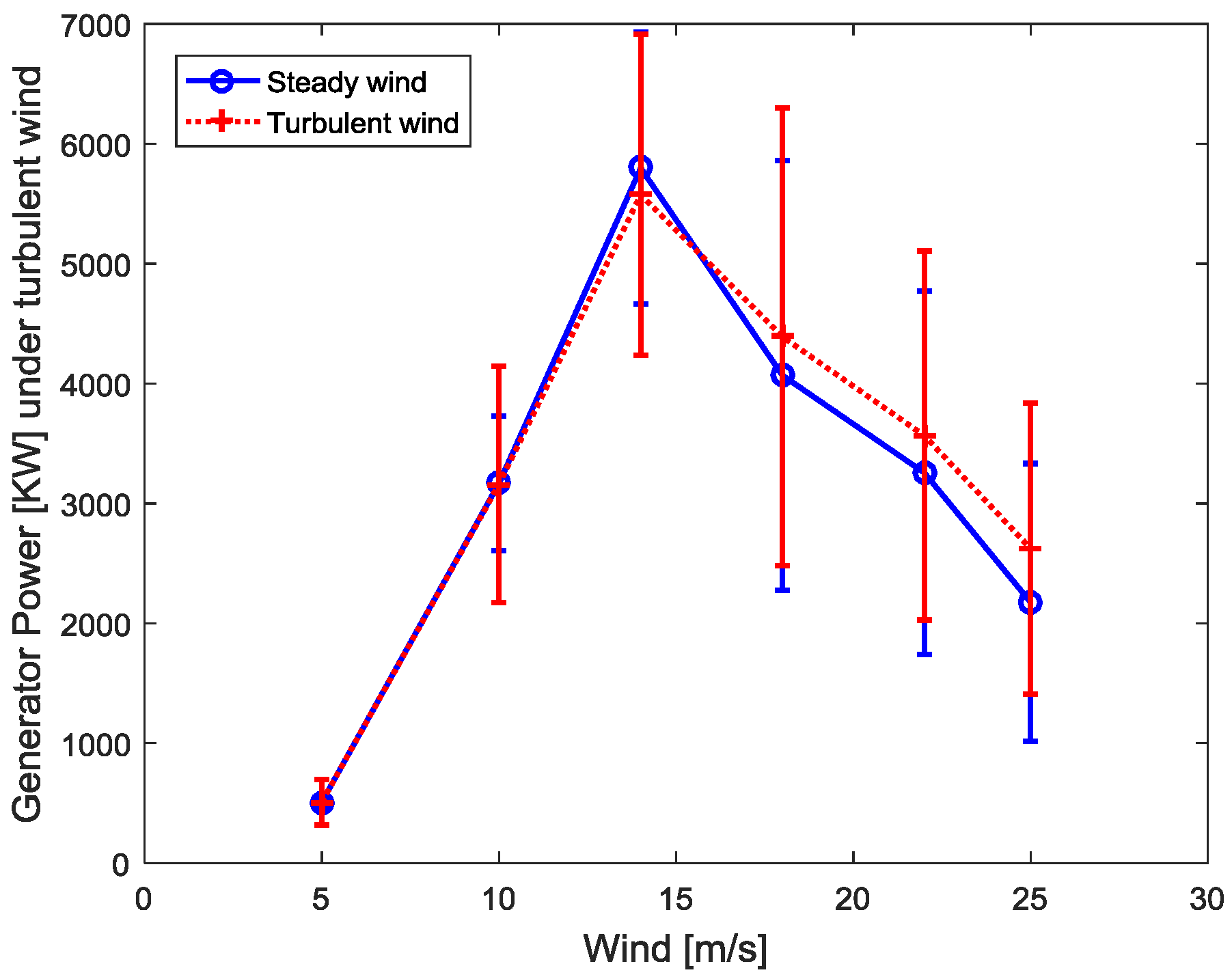
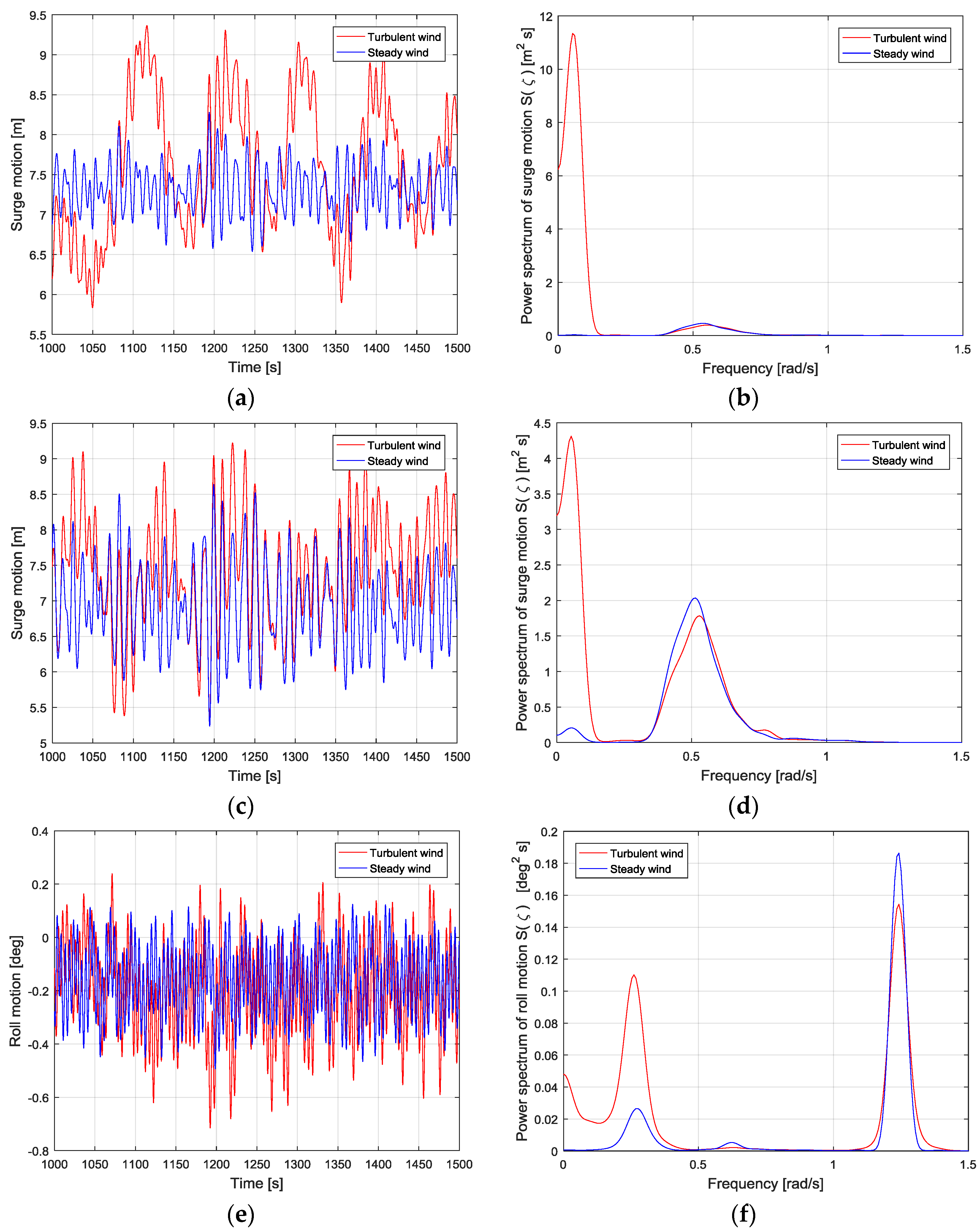
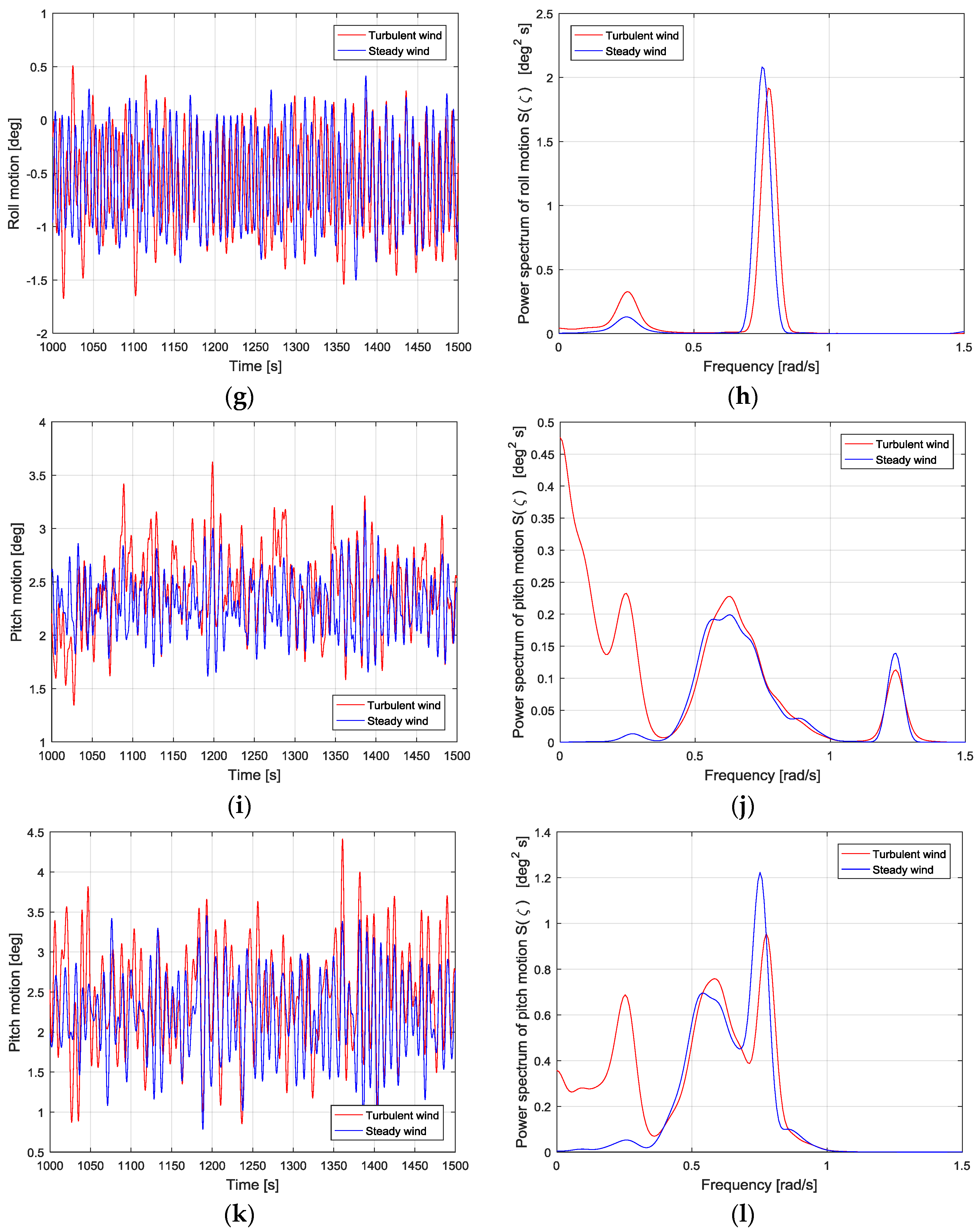
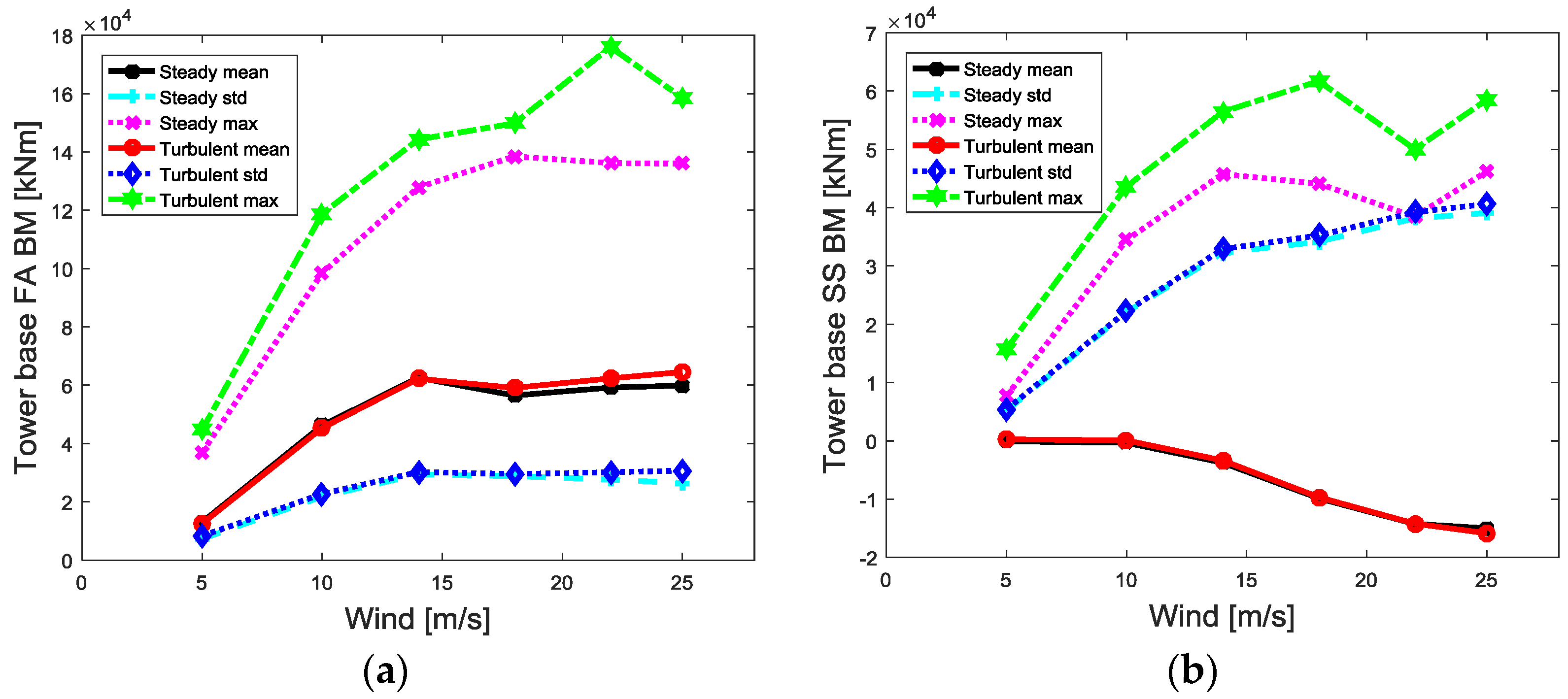
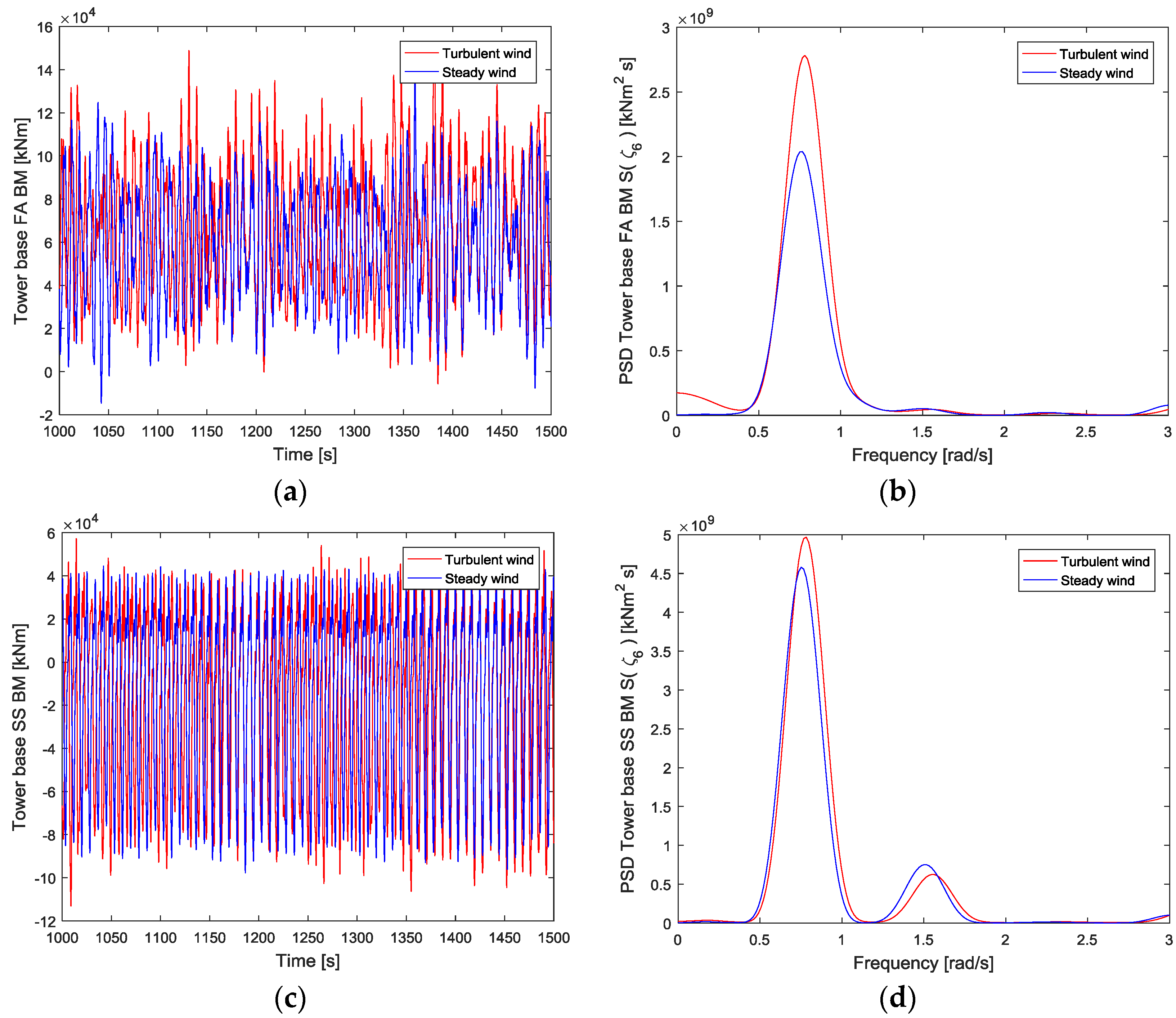
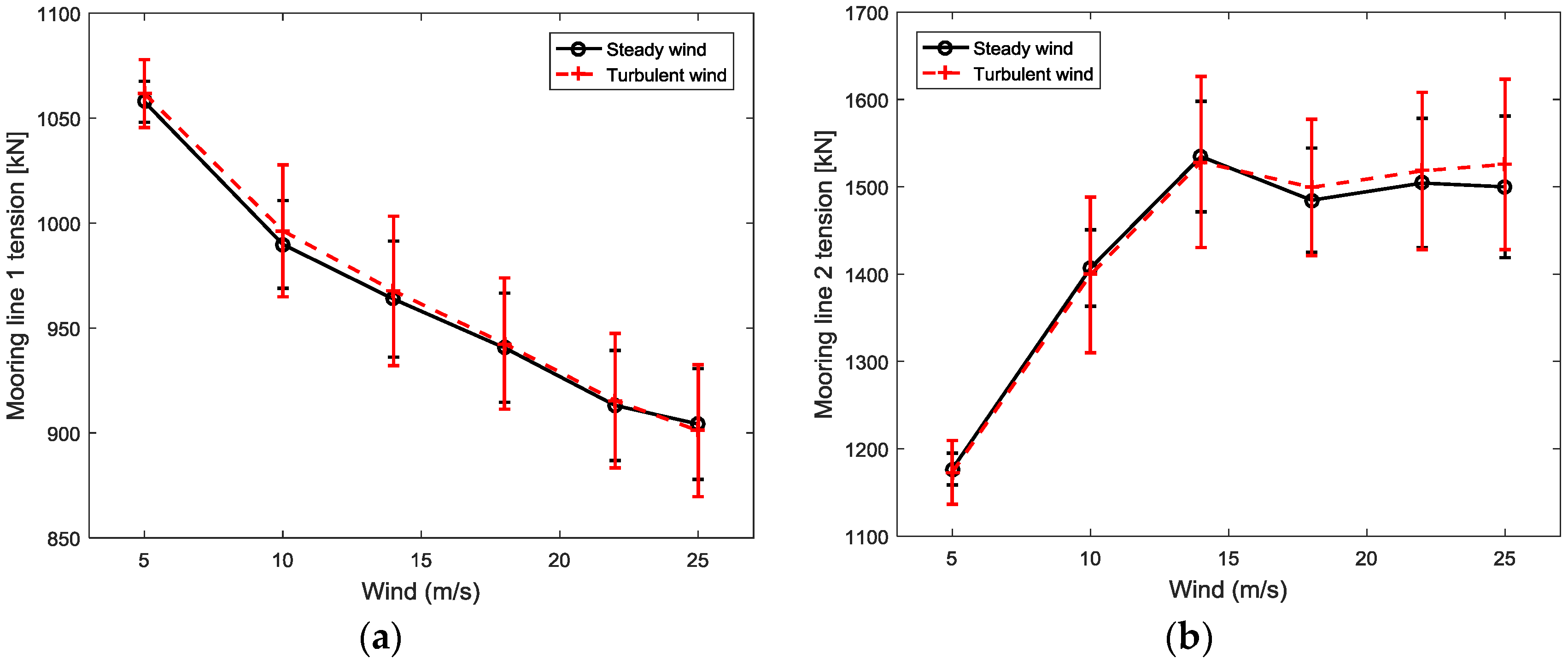
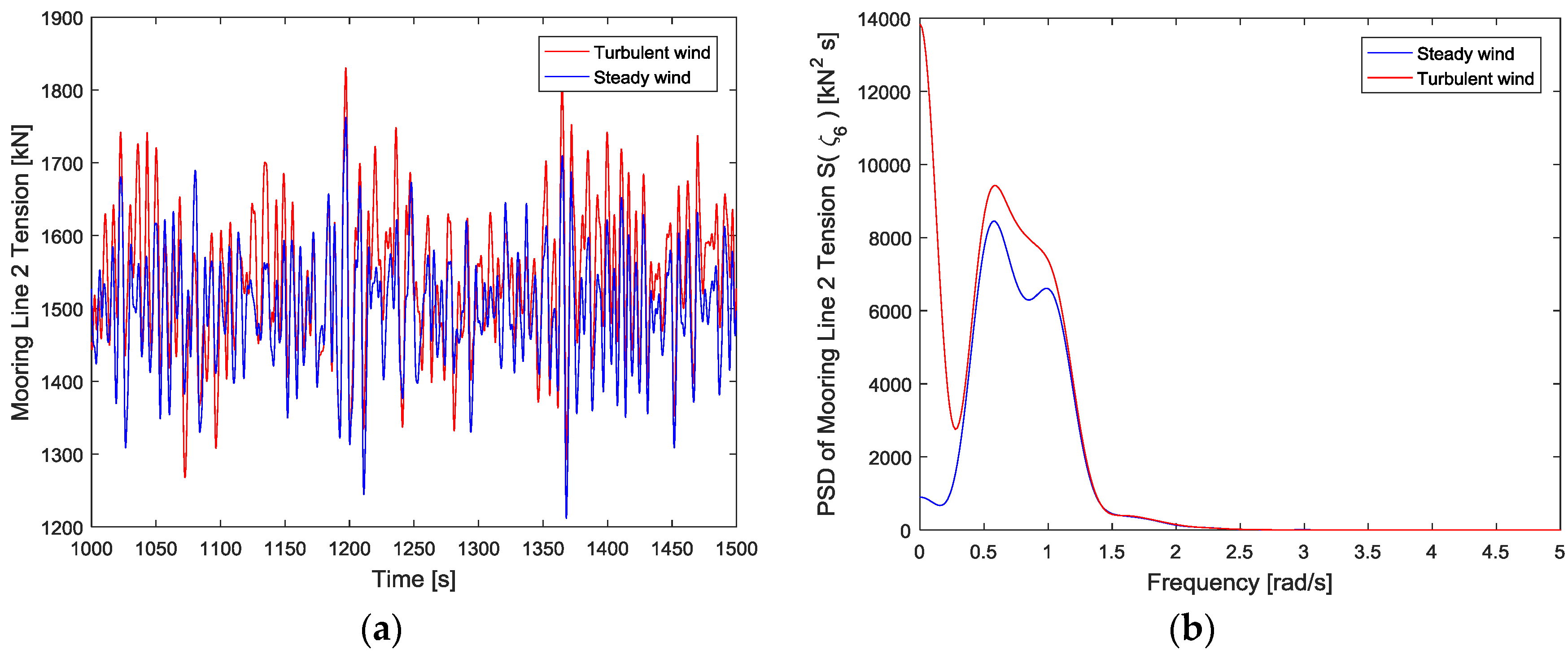
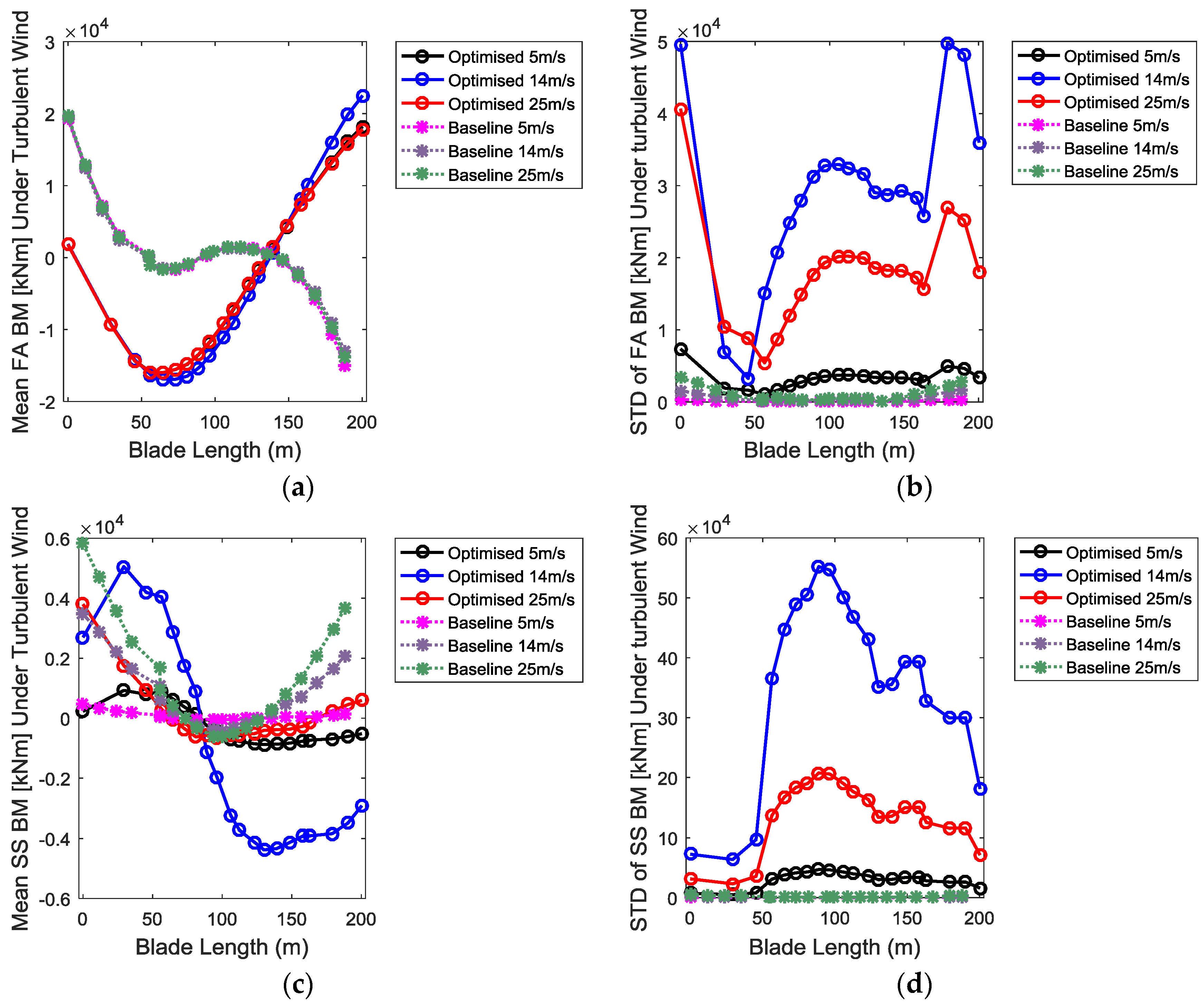
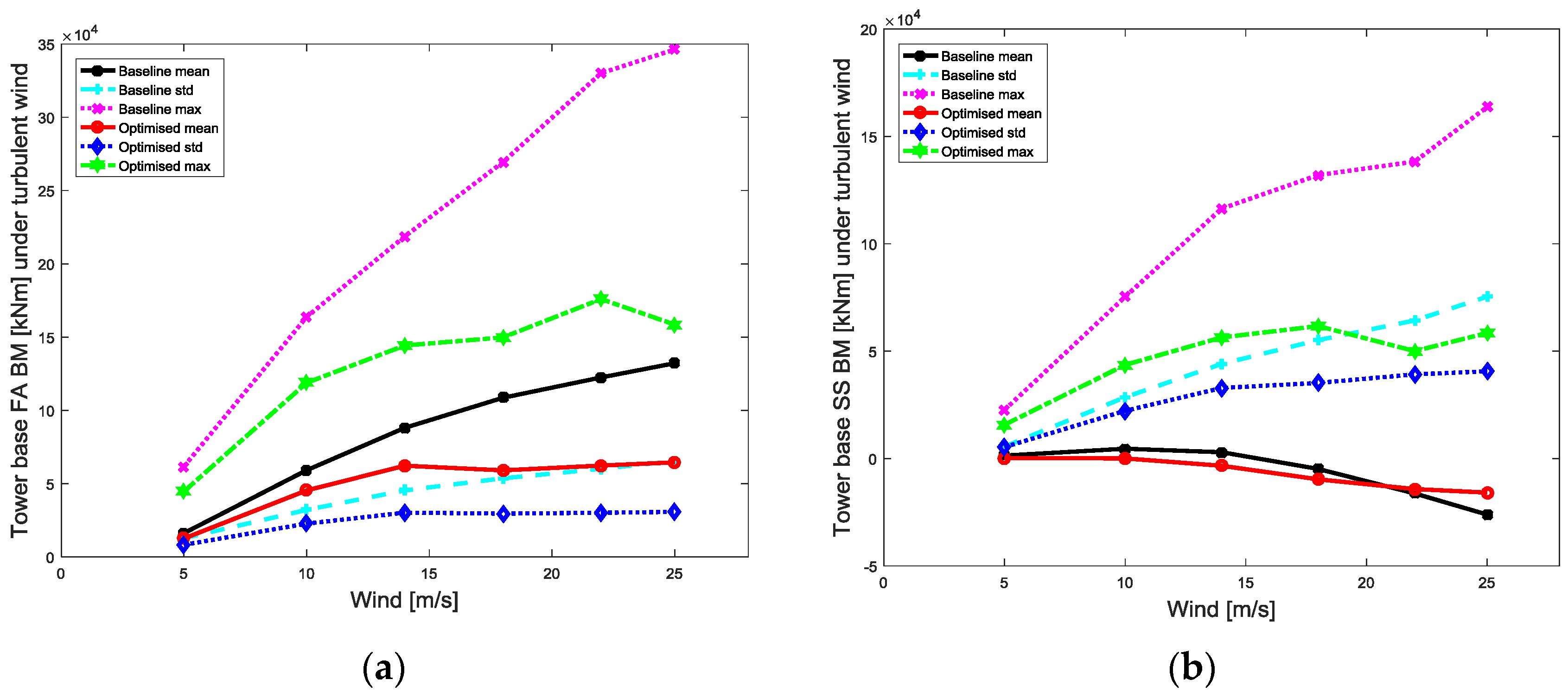
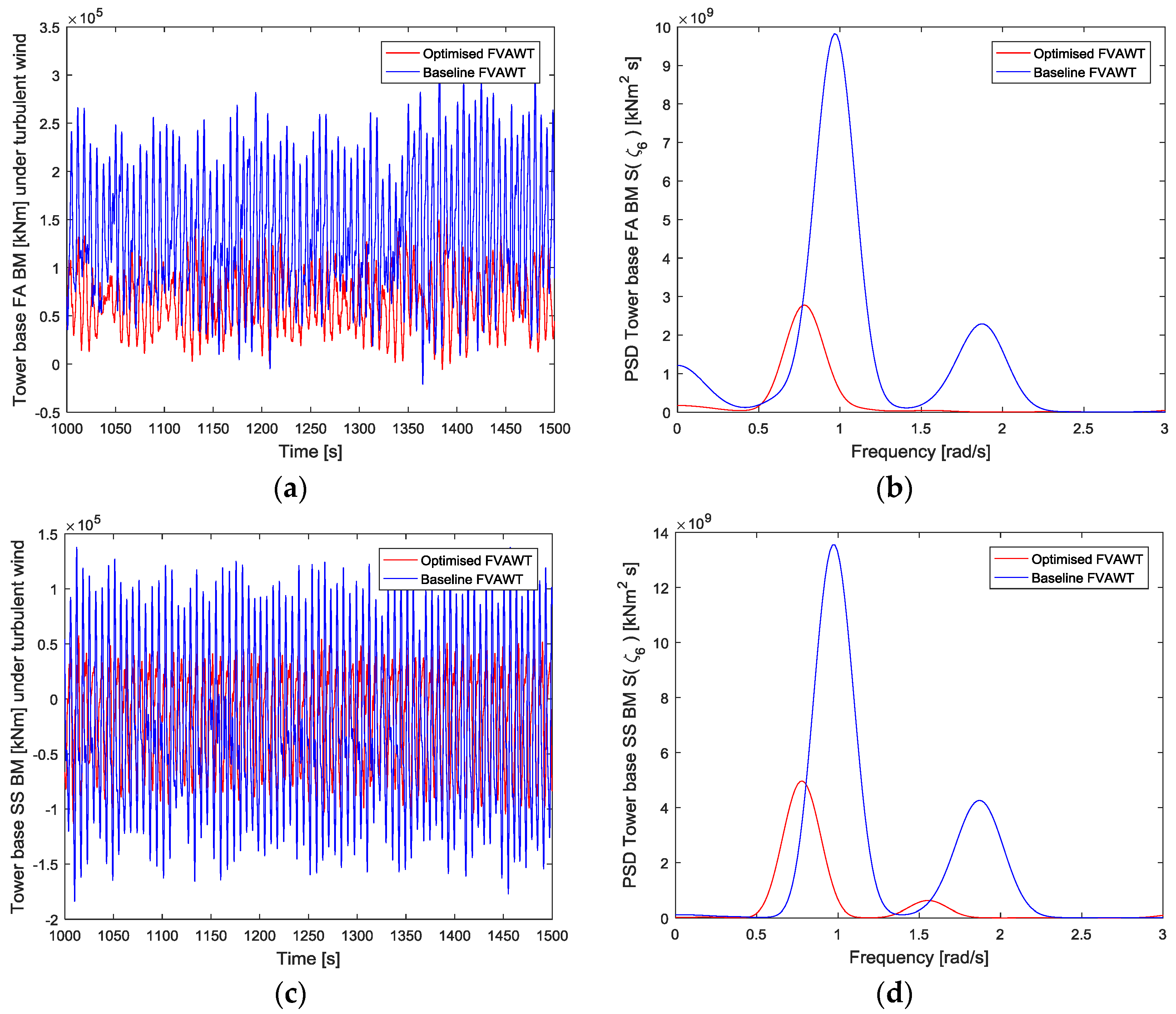
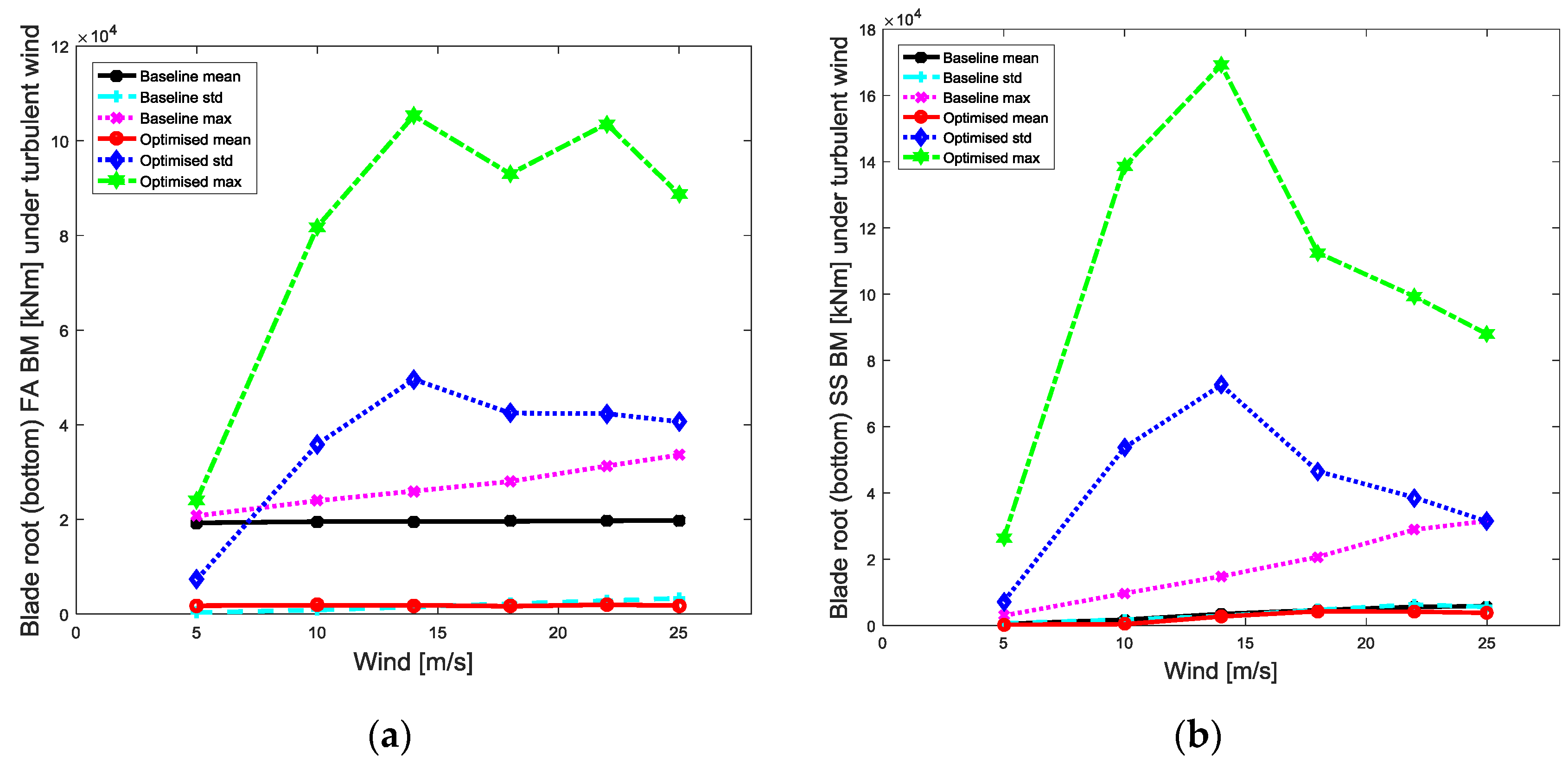
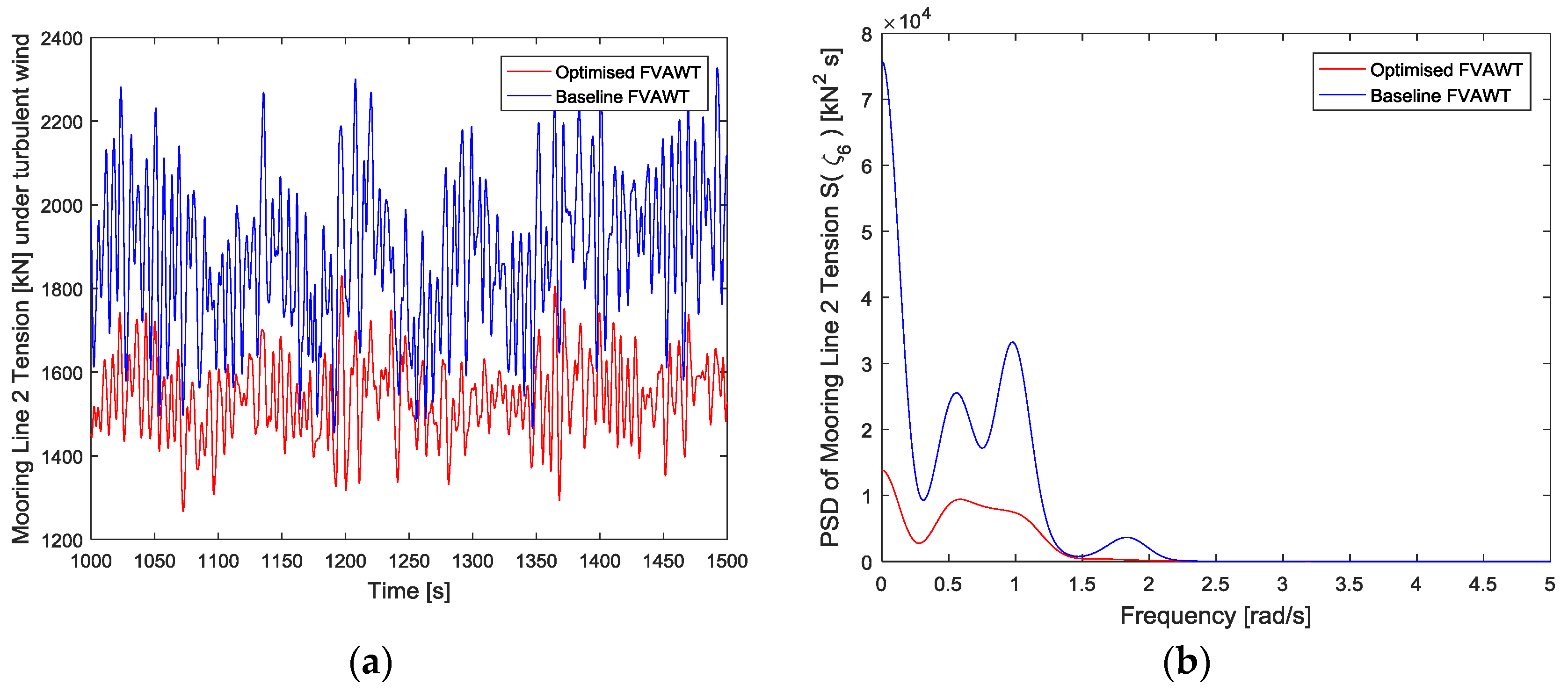
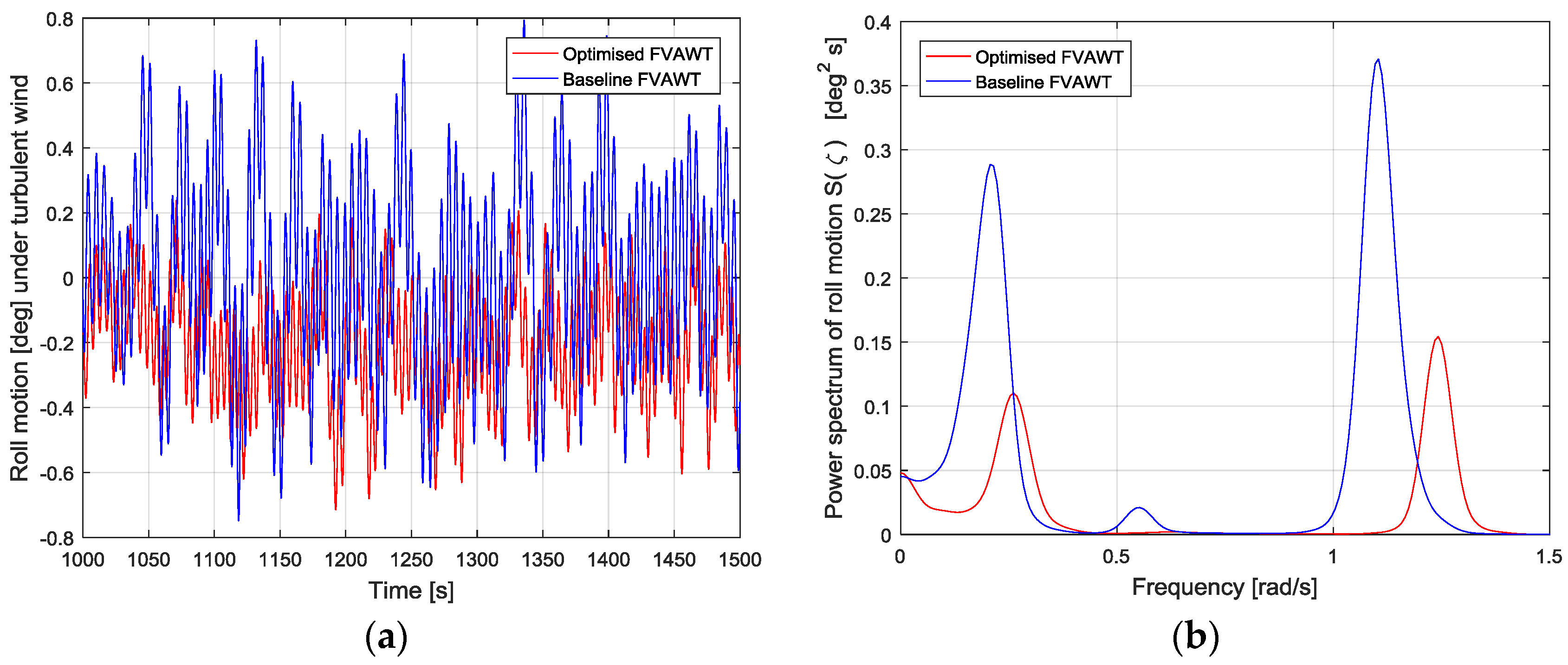
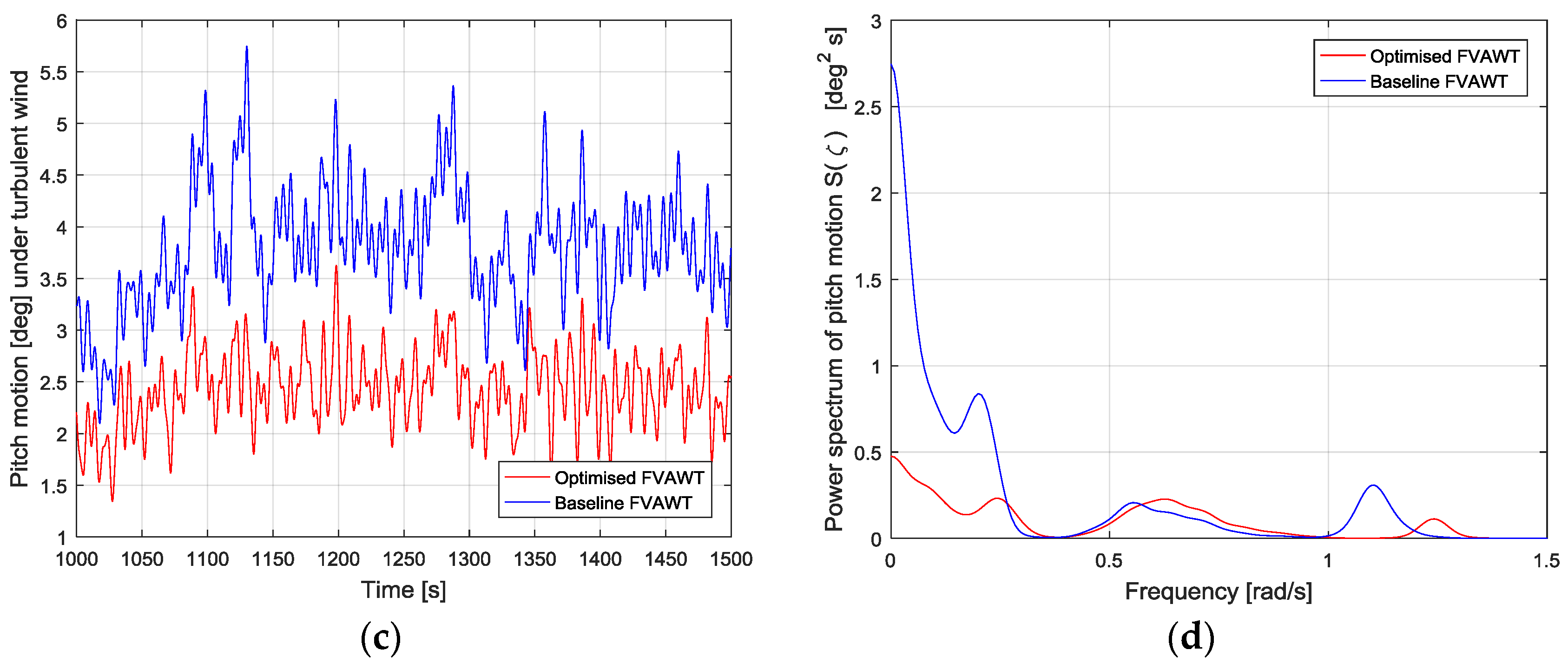
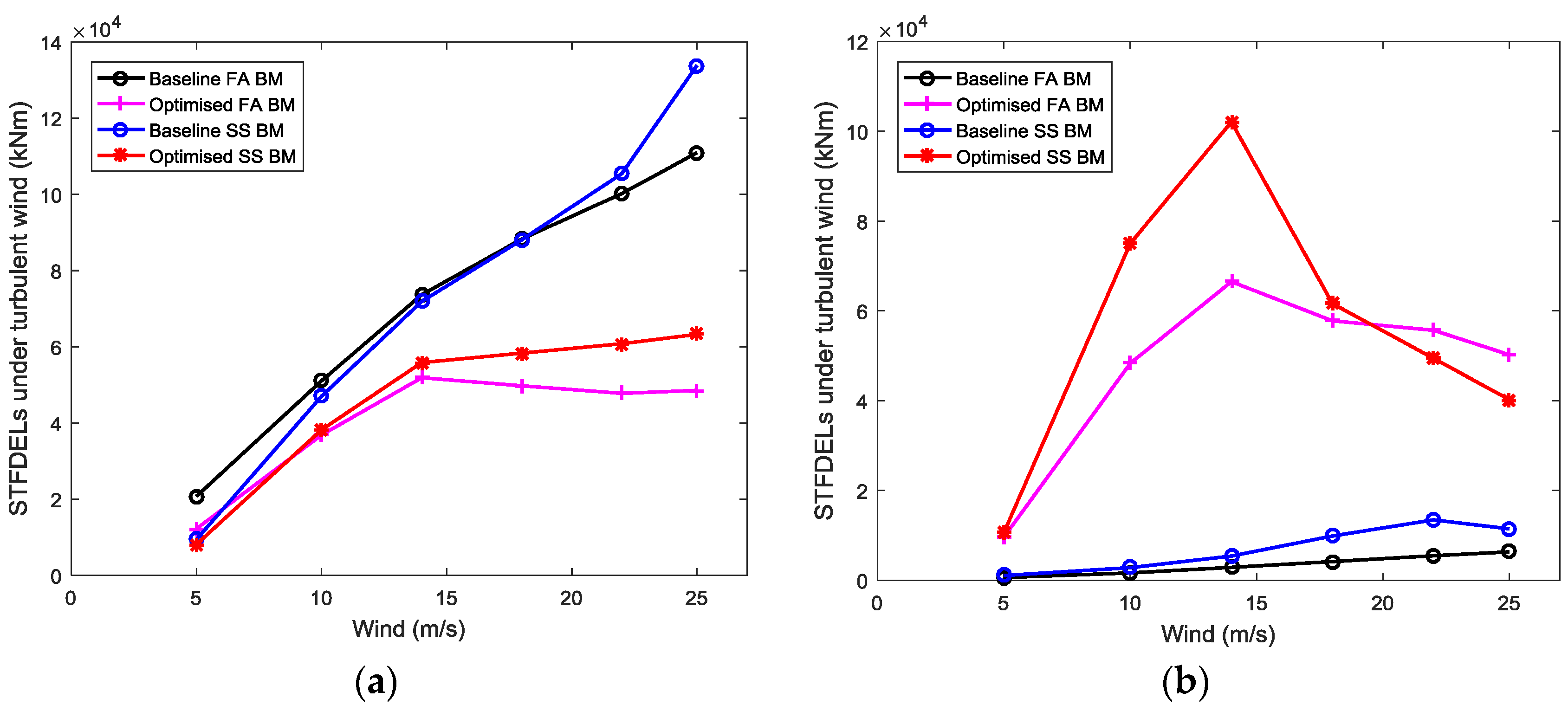
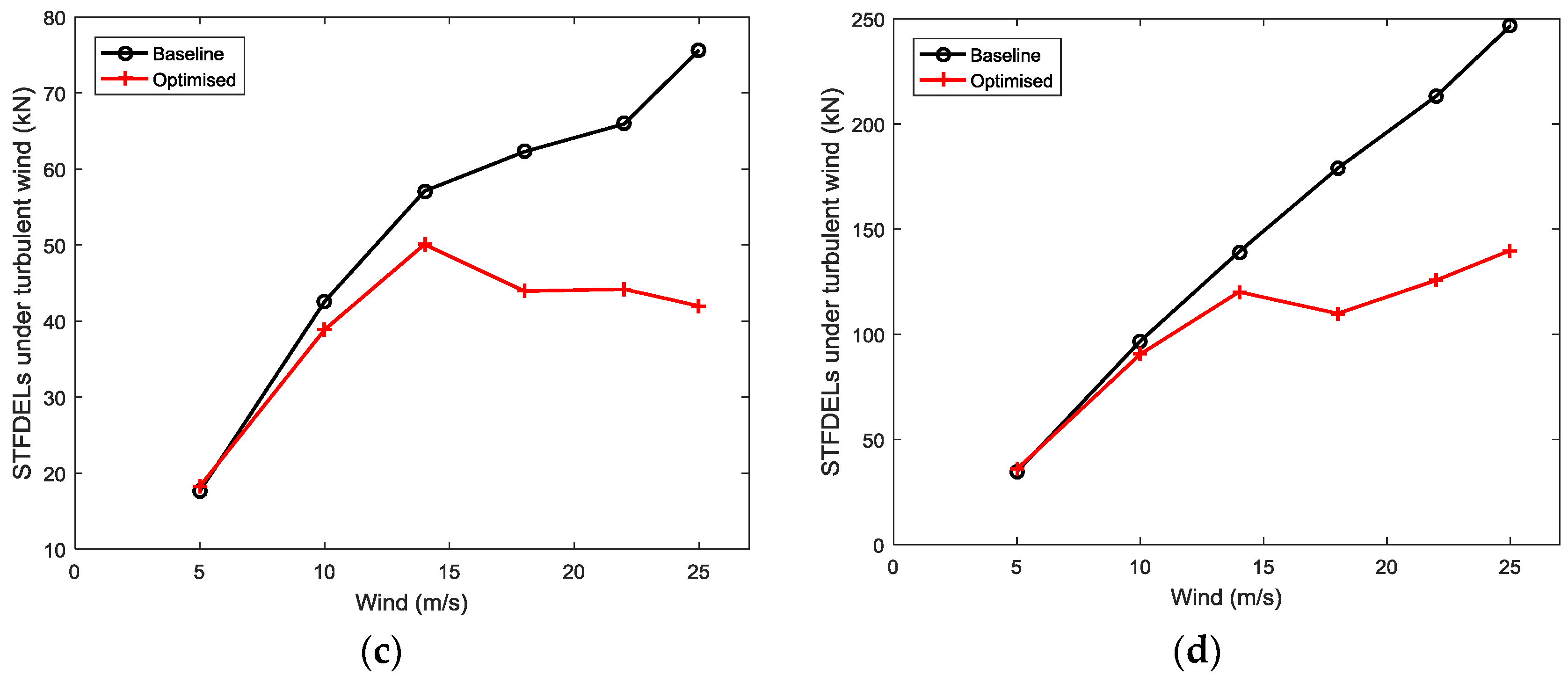
The two FVAWT concepts were evaluated under the same environmental conditions. The stochastic response characteristics of both FVAWTs were studied under steady wind and turbulent wind conditions based on the statistical analysis and the spectral analysis of their responses to explore the effects of turbulence. The results identified that the effect of turbulence on the both FVAWTs resulted in an increased power generation, higher power variation, higher excitation for low frequency motions, greater fatigue damage but a reduction in the 2P effects. However, the effect of turbulence is negligible on the mean bending moment at the blade extremes but leads to higher loads level in mooring lines and at the tower base especially at wind speeds above the rated wind speed. Furthermore, the results of the fatigue analysis showed that at wind speeds farther from the rated wind speed (14 m/s), the internal loads could have lower damaging effects than at wind speeds closer to the rated wind speed for the 5 MW optimised FVAWT.
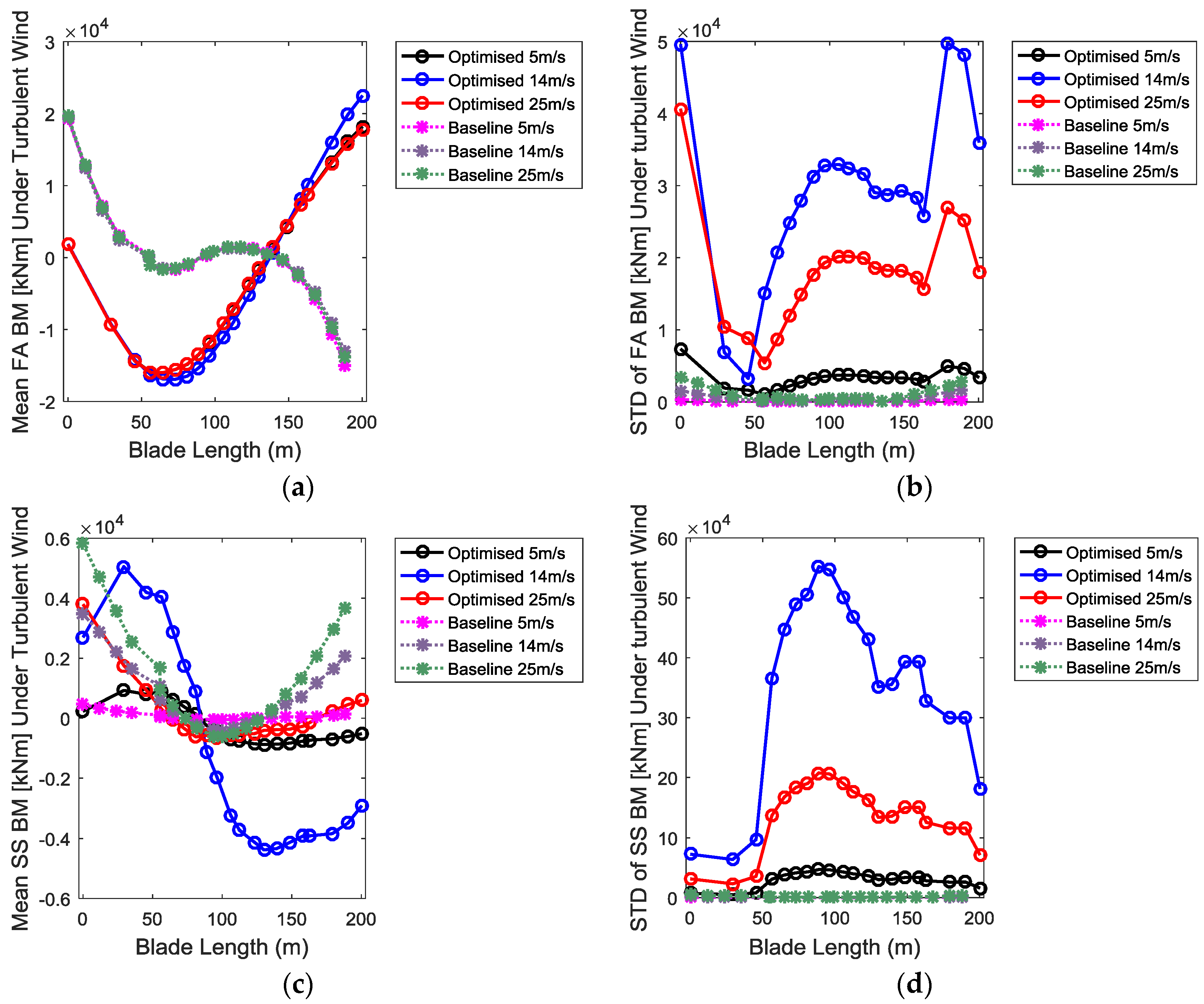
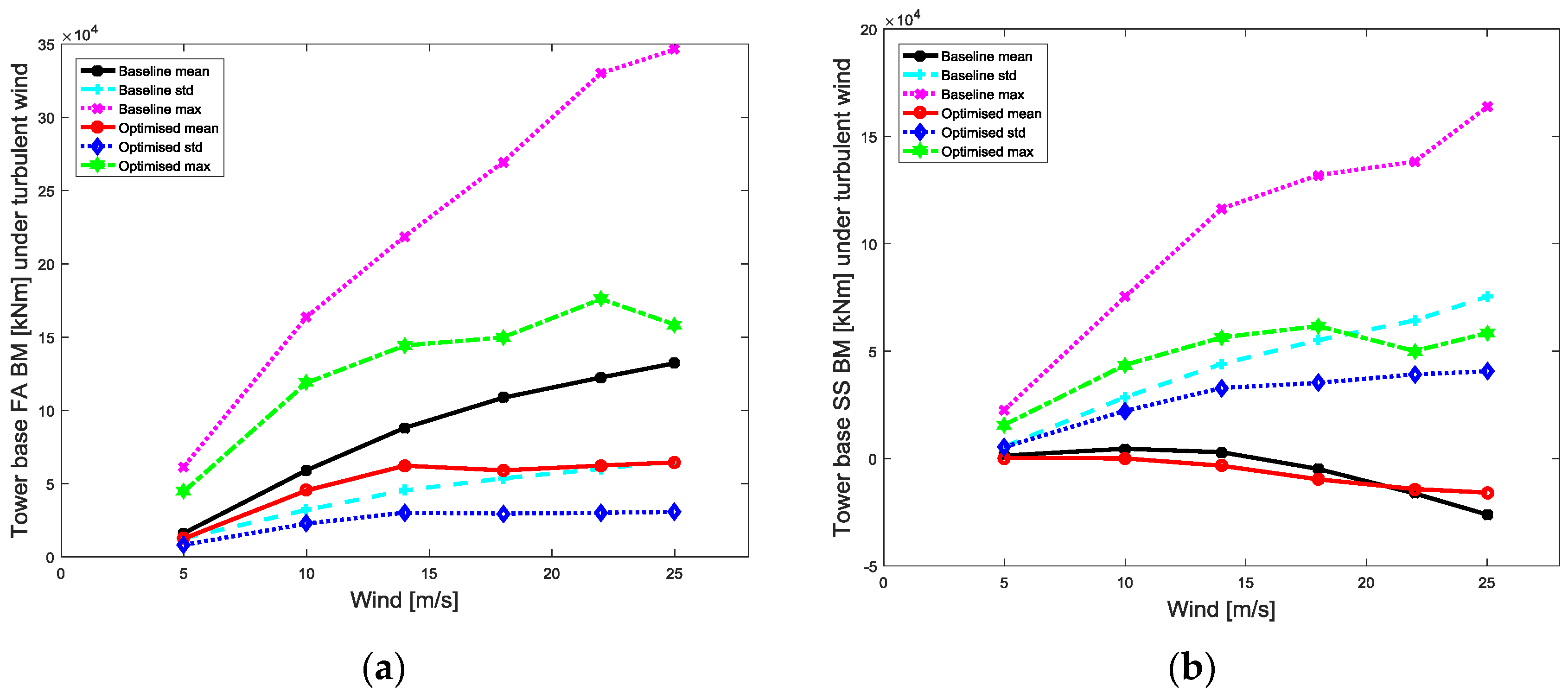
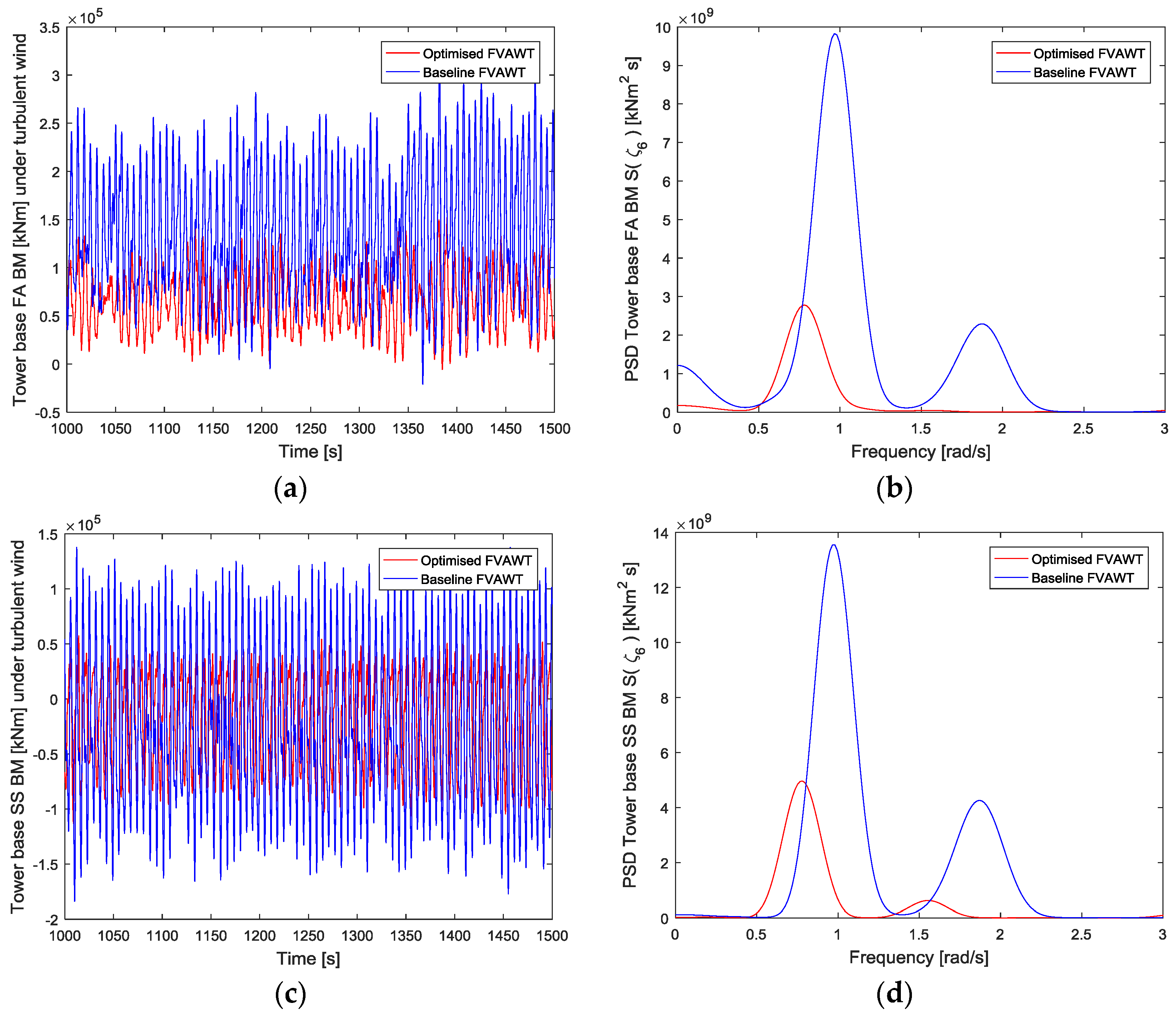
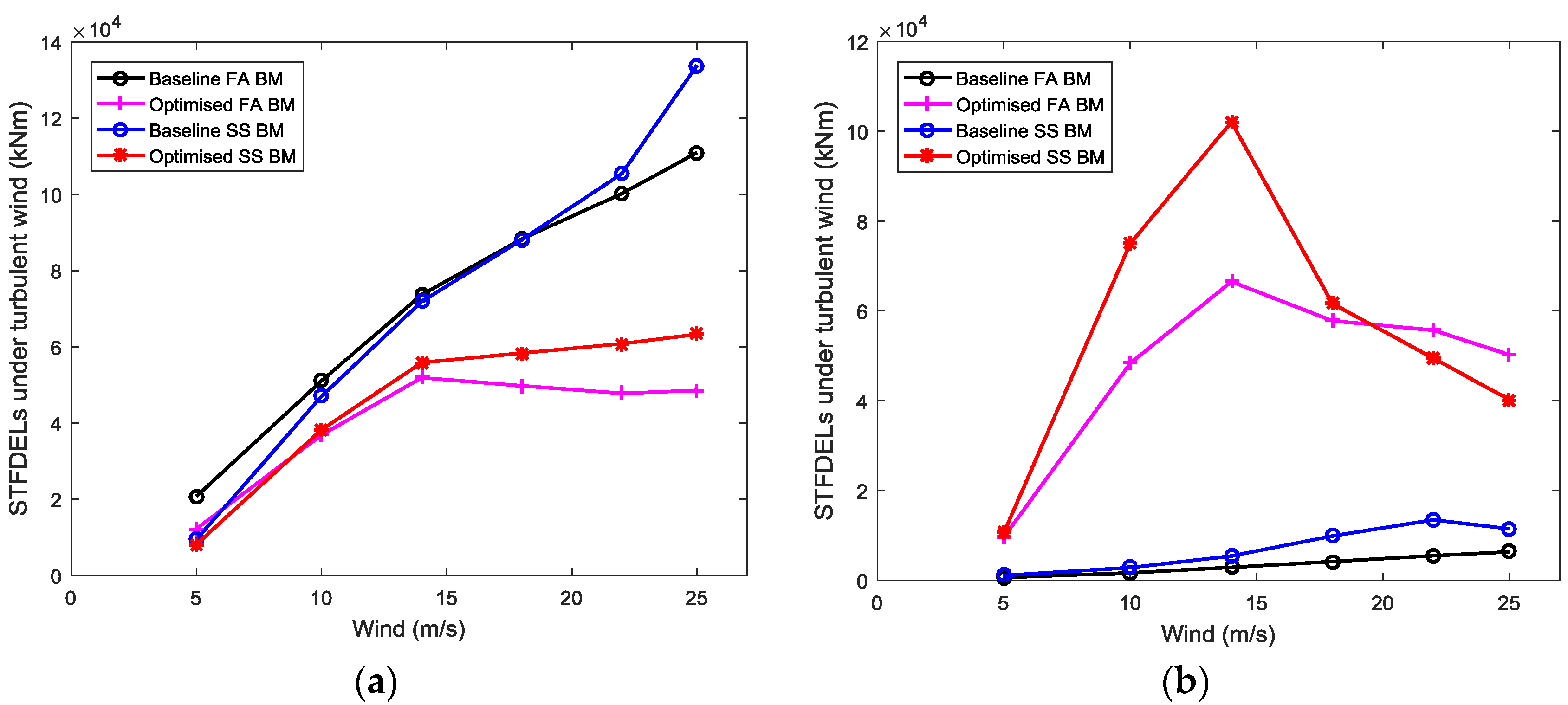
Finally, a comparison of dynamic responses between the 5 MW baseline FVAWT and the 5 MW optimised FVAWT identified the 5 MW optimised FVAWT to have lower Fore-Aft (FA) bending moments but higher lower Side-Side (SS) bending moment in flexible components, lower motions amplitude, lower short-term fatigue damage equivalent loads and a further reduced 2P effects under turbulent wind condition.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}