
Fault-Ride through Strategy for Permanent-Magnet Synchronous Generators in Variable-Speed Wind Turbines



Abstract
:1. Introduction
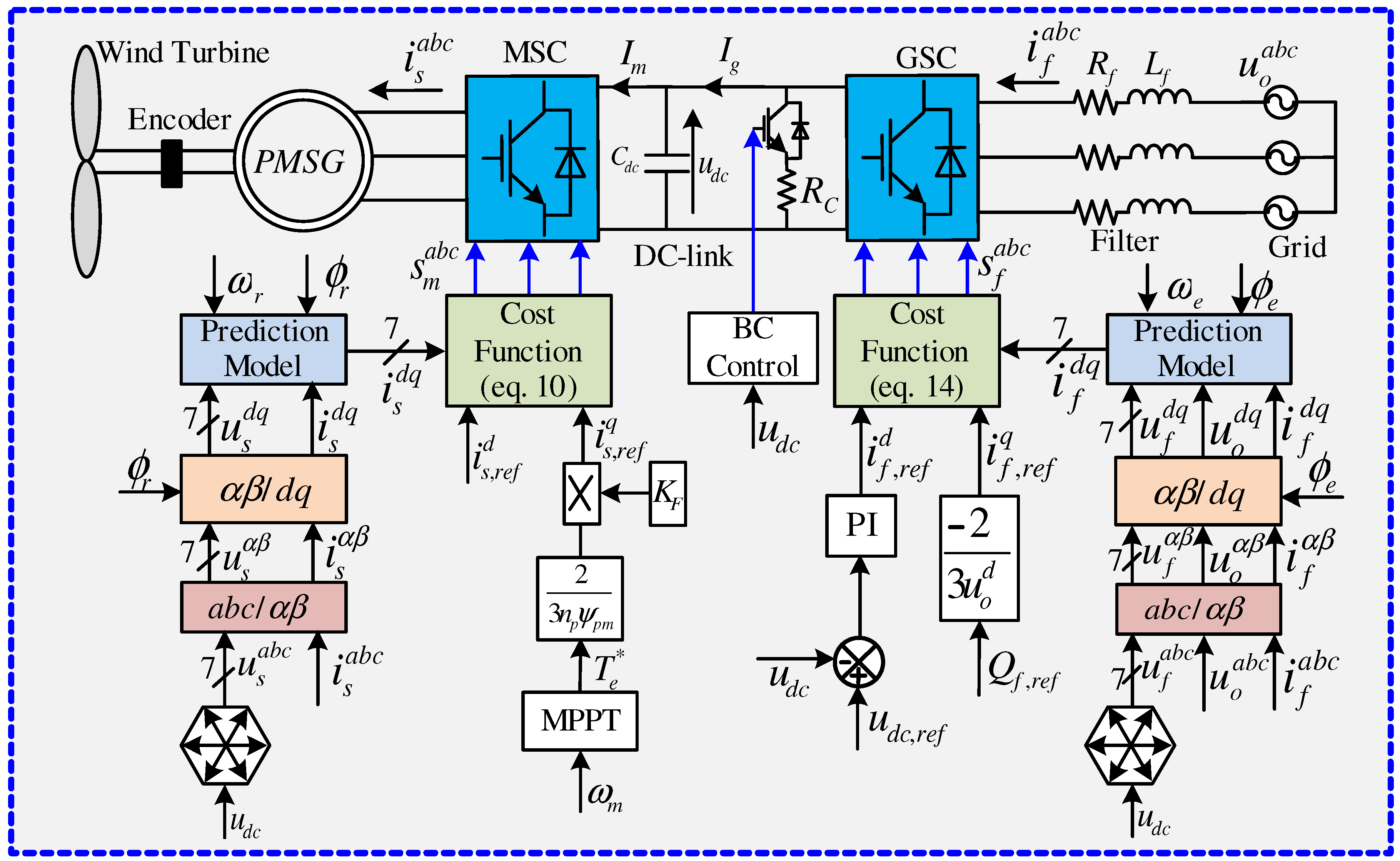
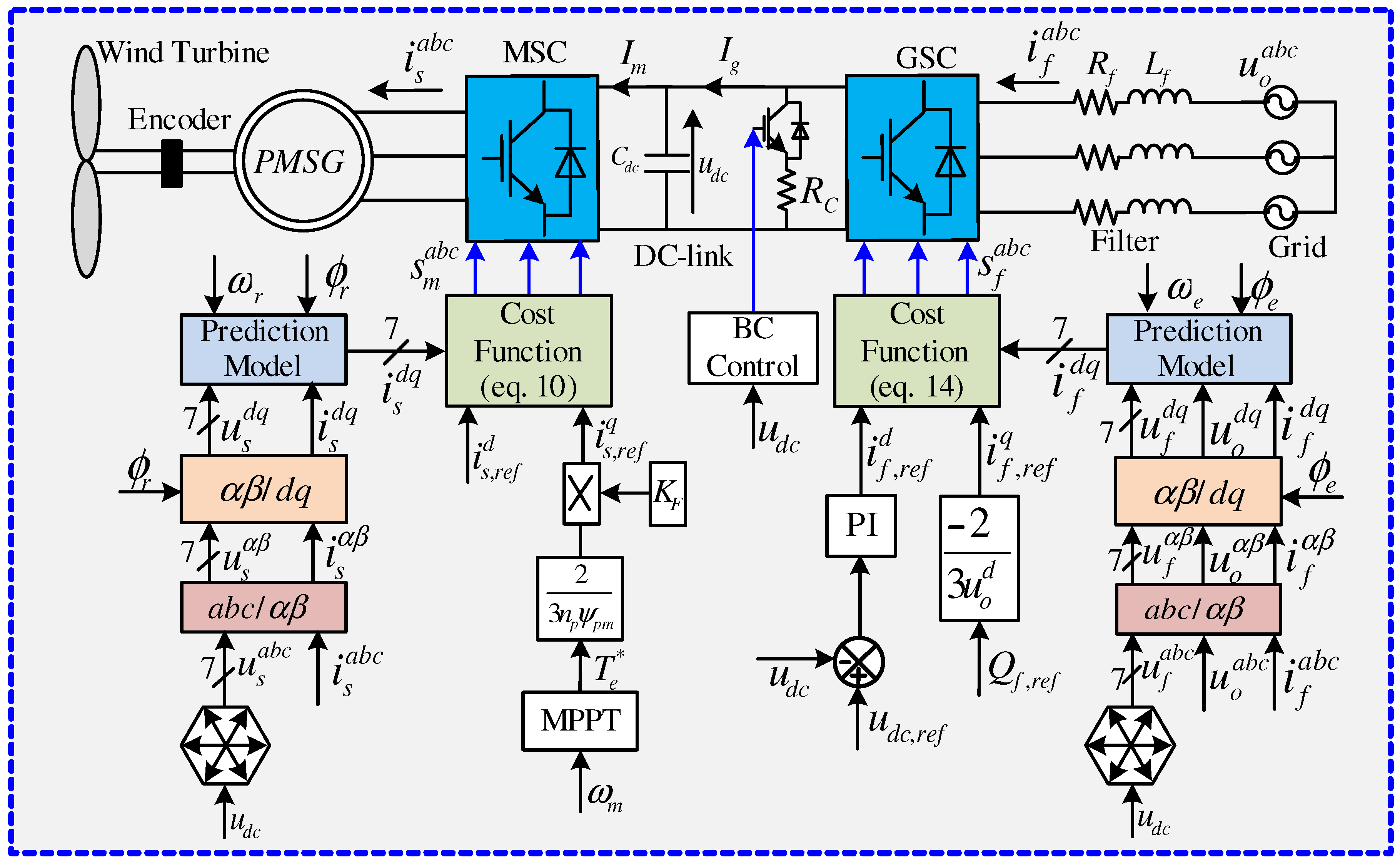
2. Modeling of the WECSs
2.1. Permanent-Magnet Synchronous Generator (PMSG)
2.2. Back-to-Back Converter and DC-Link
2.3. Filter and Grid
3. Direct Model Predictive Control (DMPC)
3.1. DMPC for MSC
3.2. DMPC for GSC
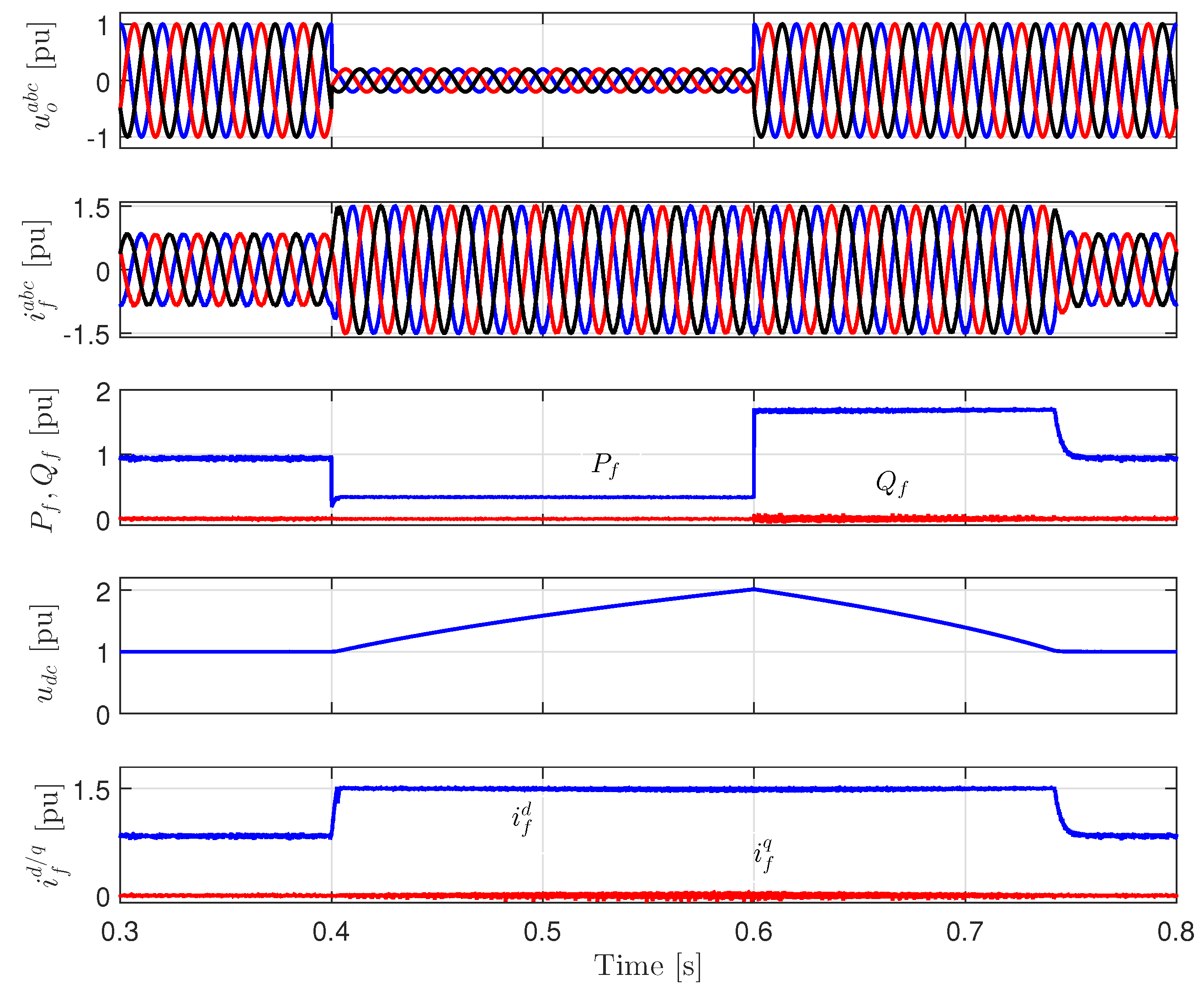
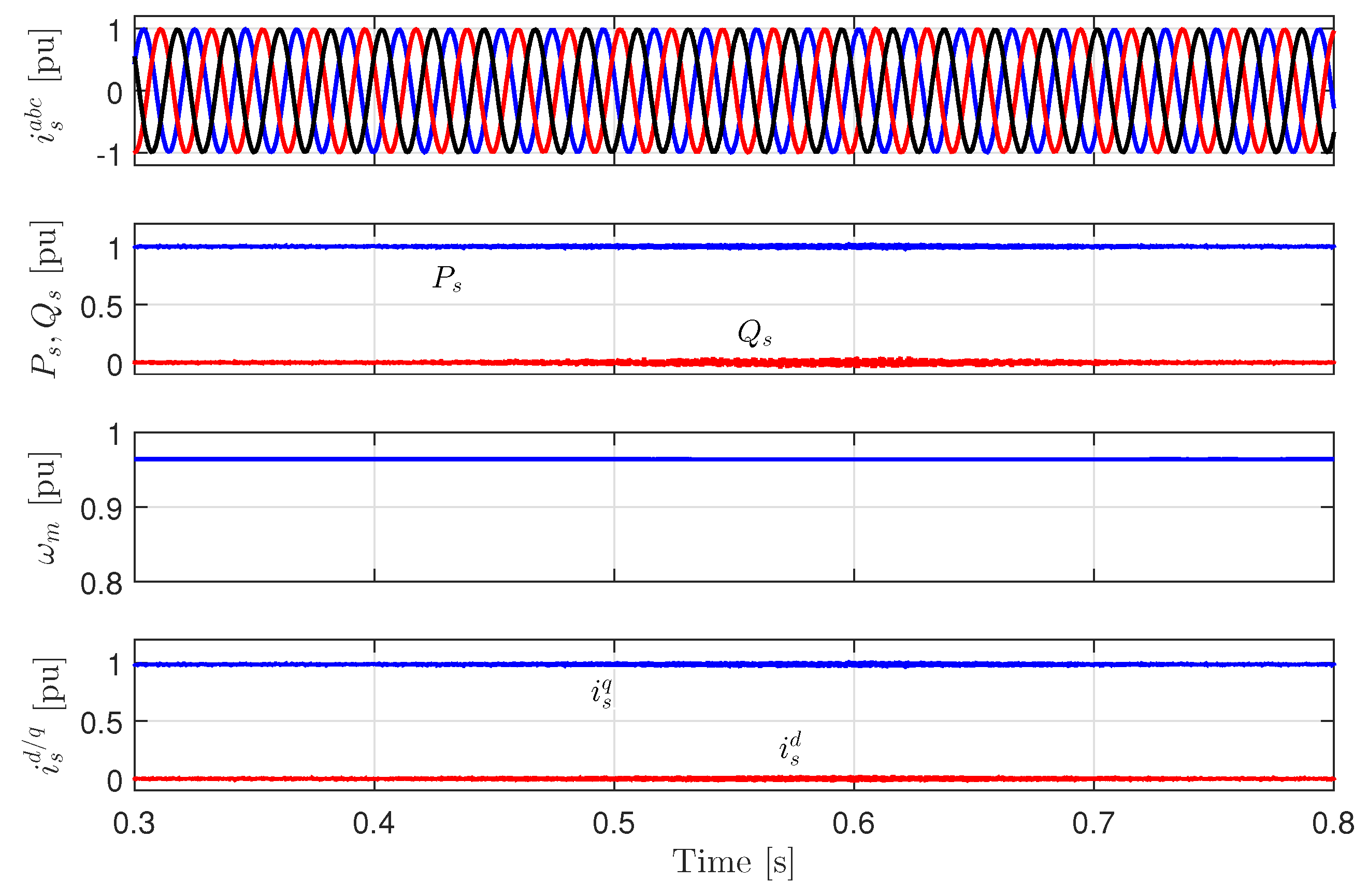
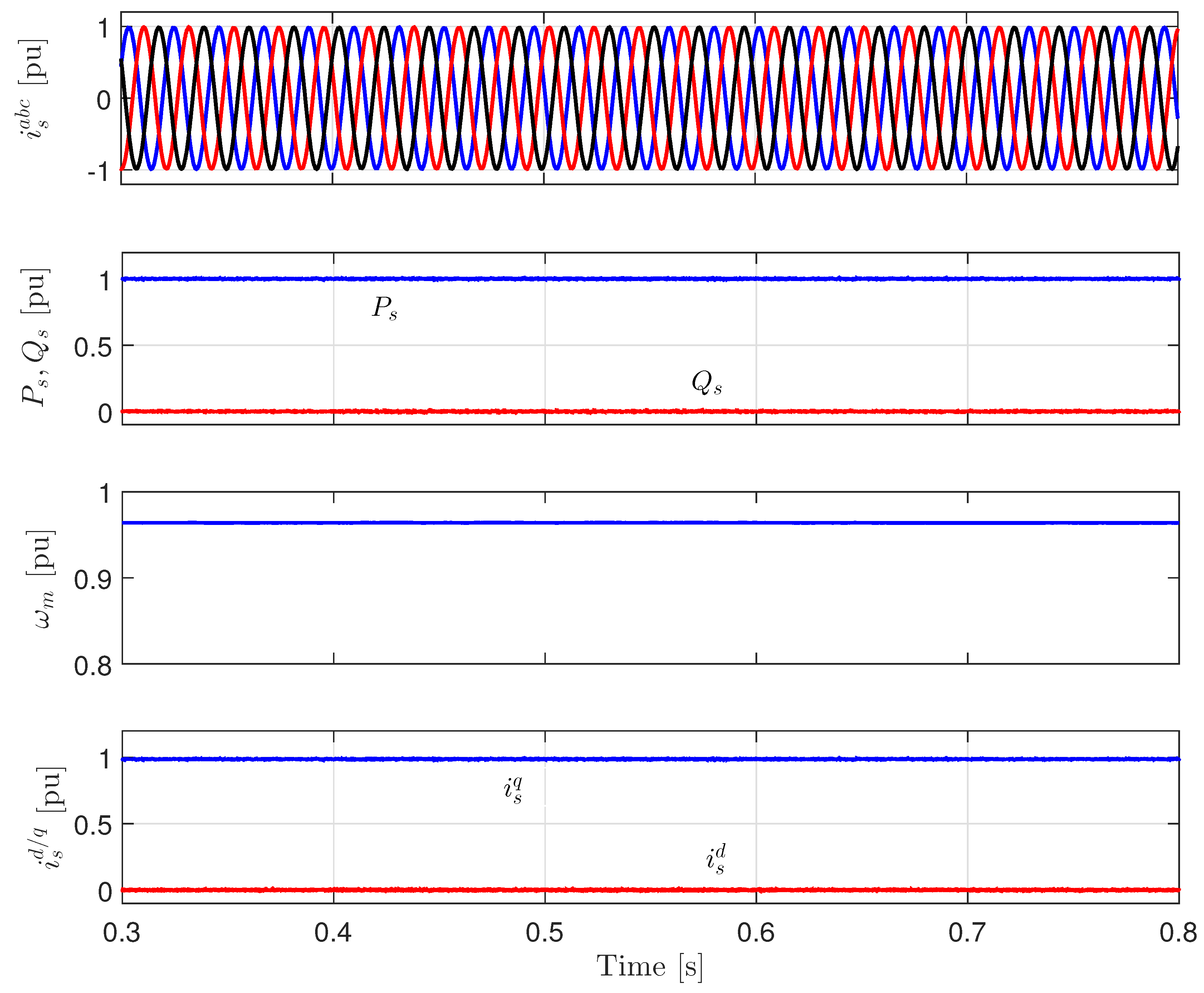
4. Proposed FRT Strategy
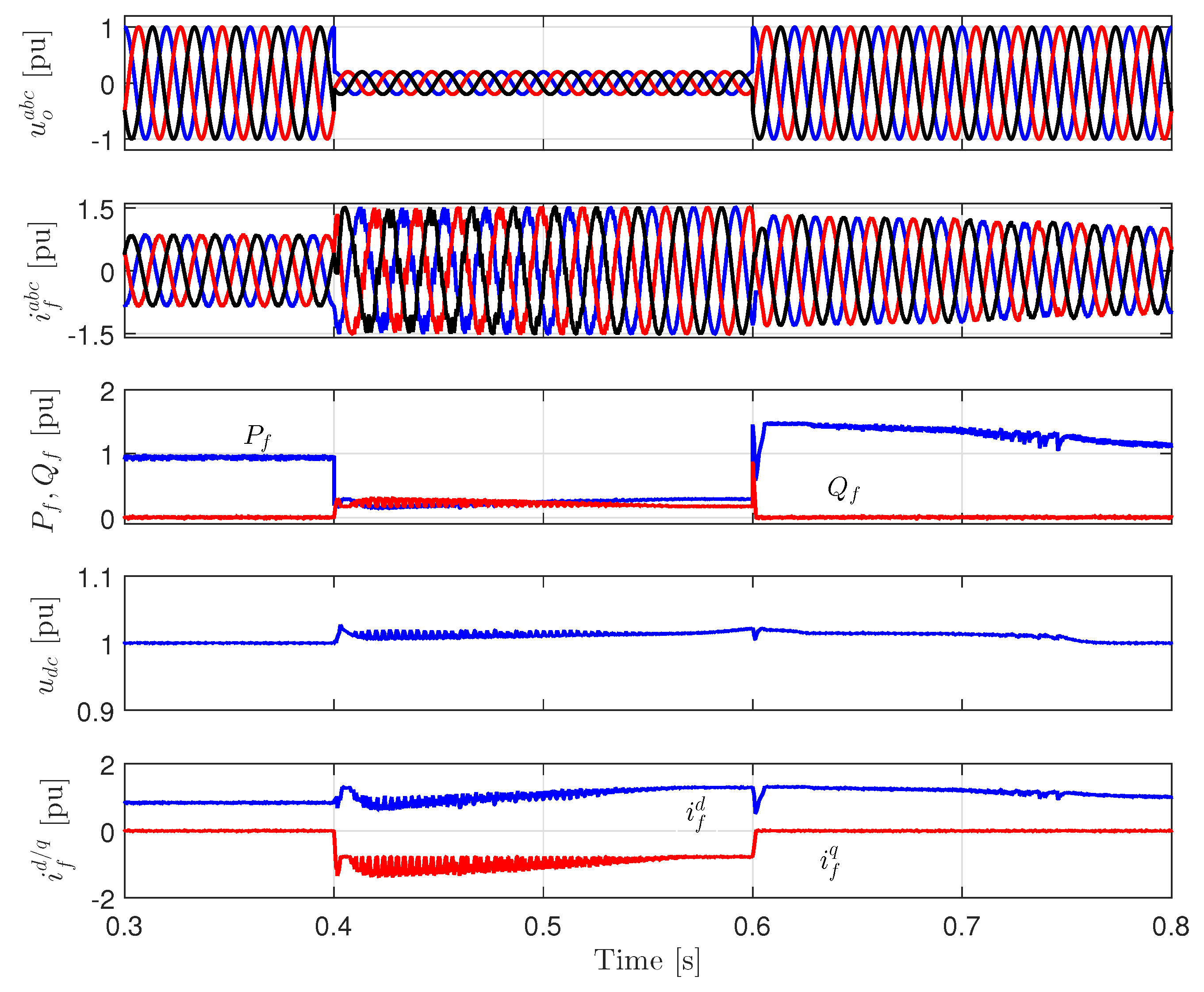
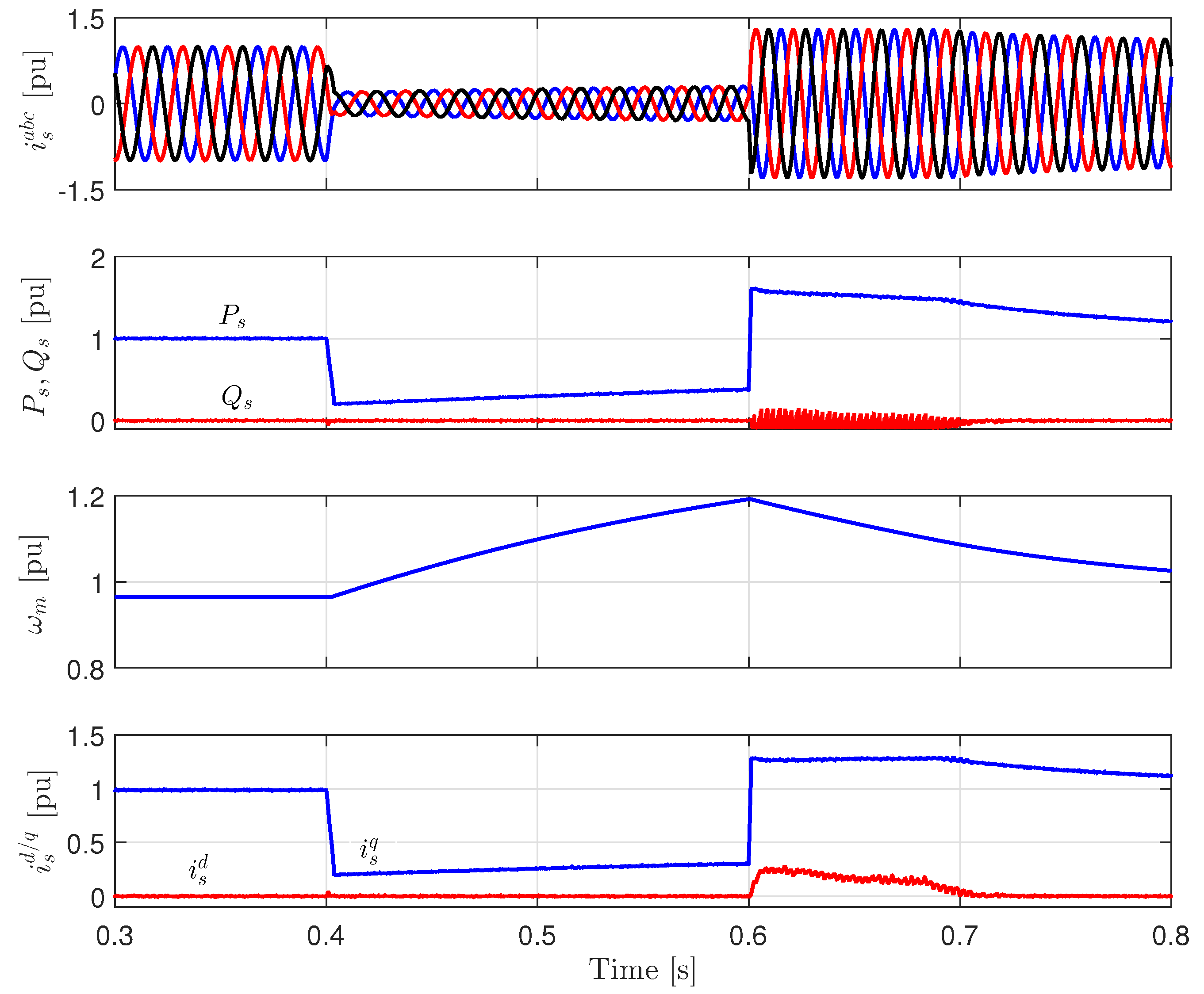
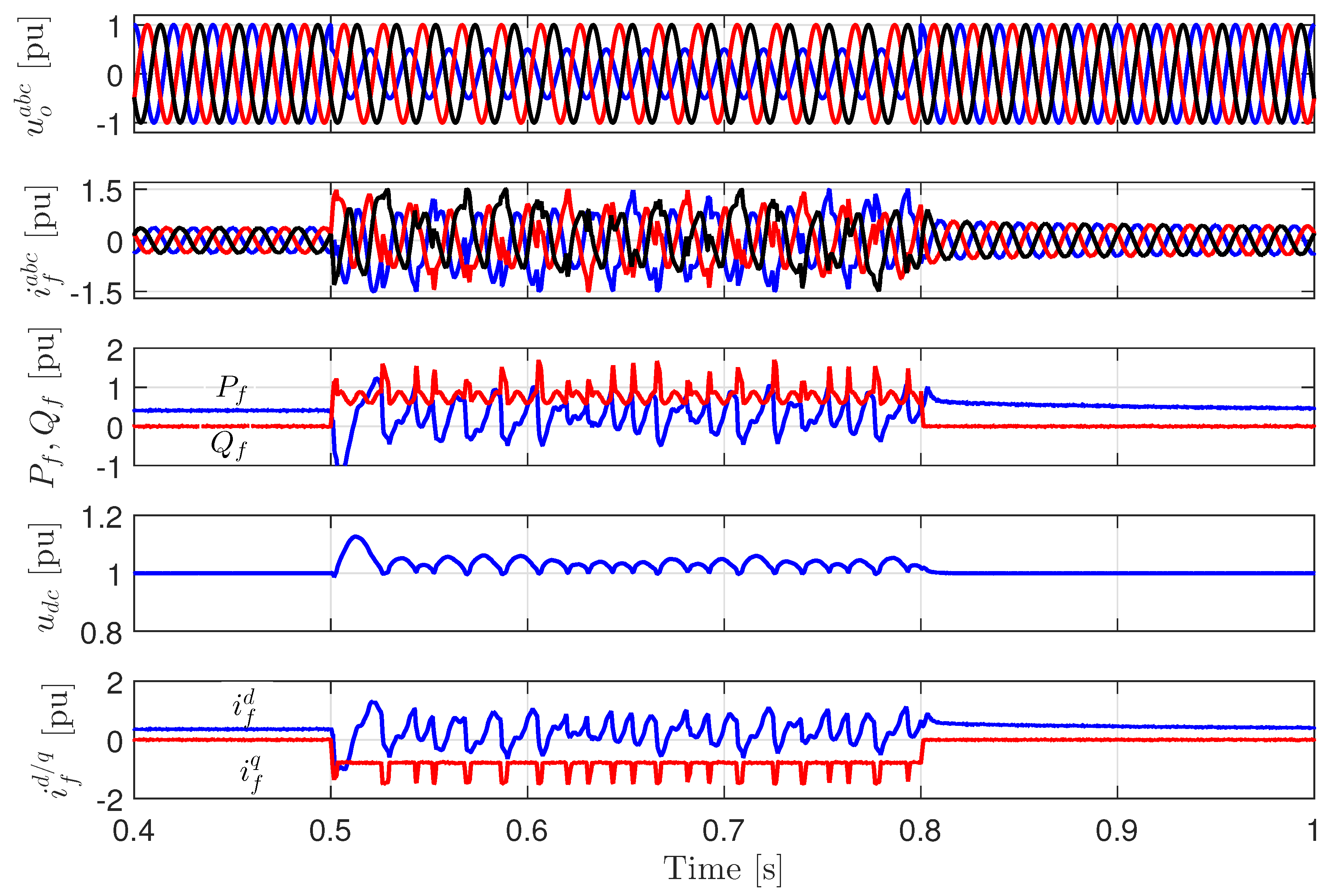
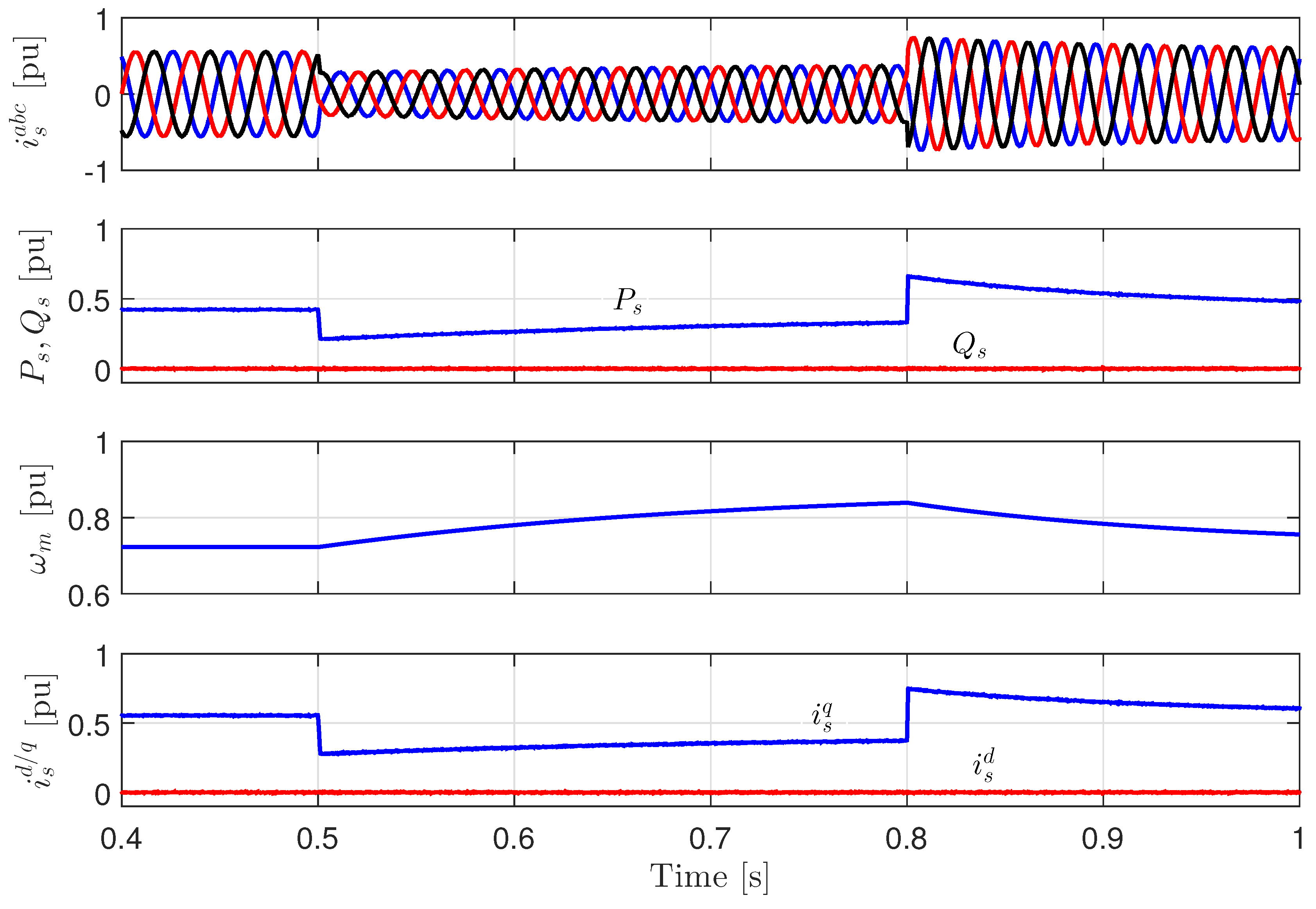
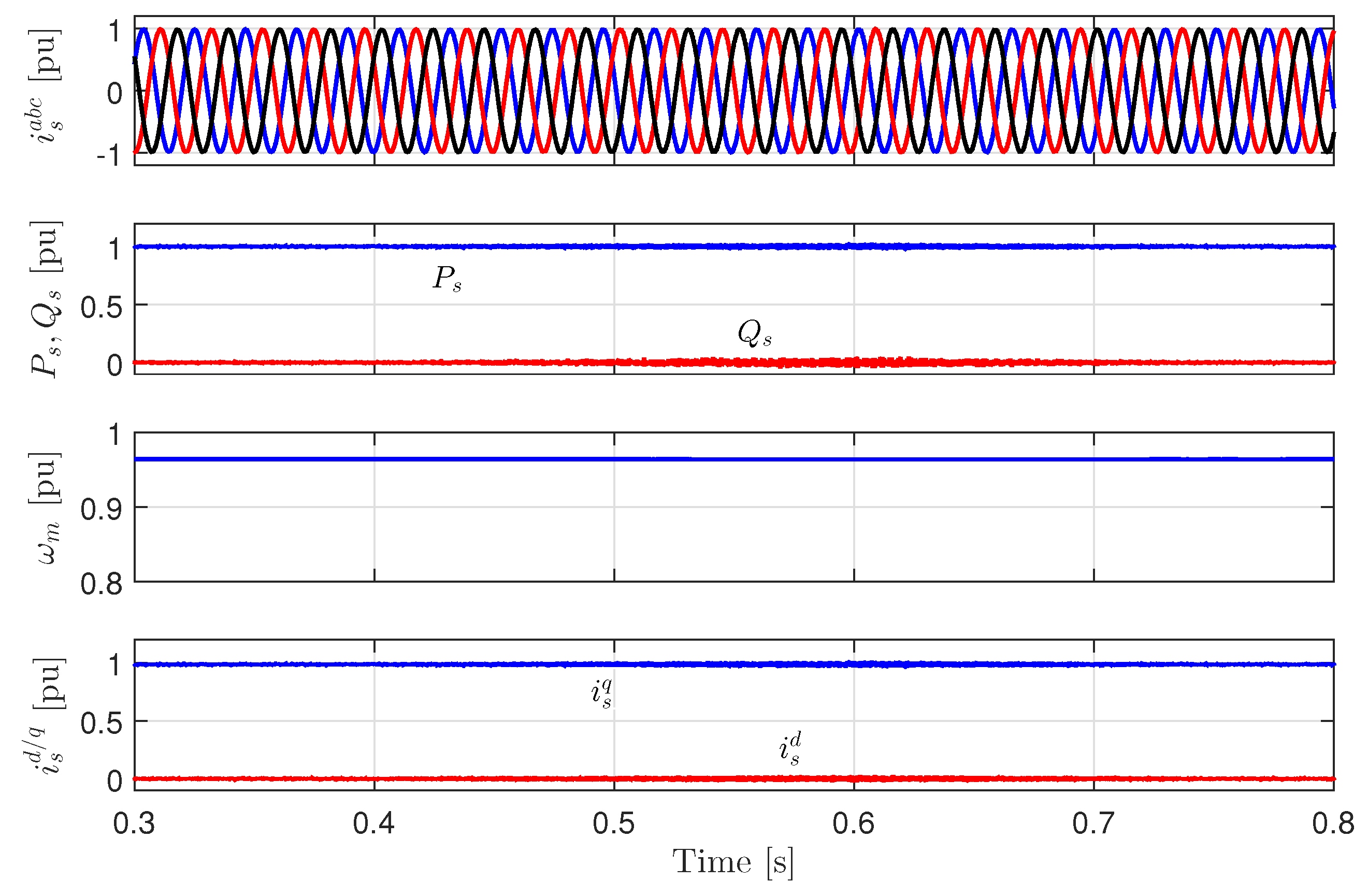
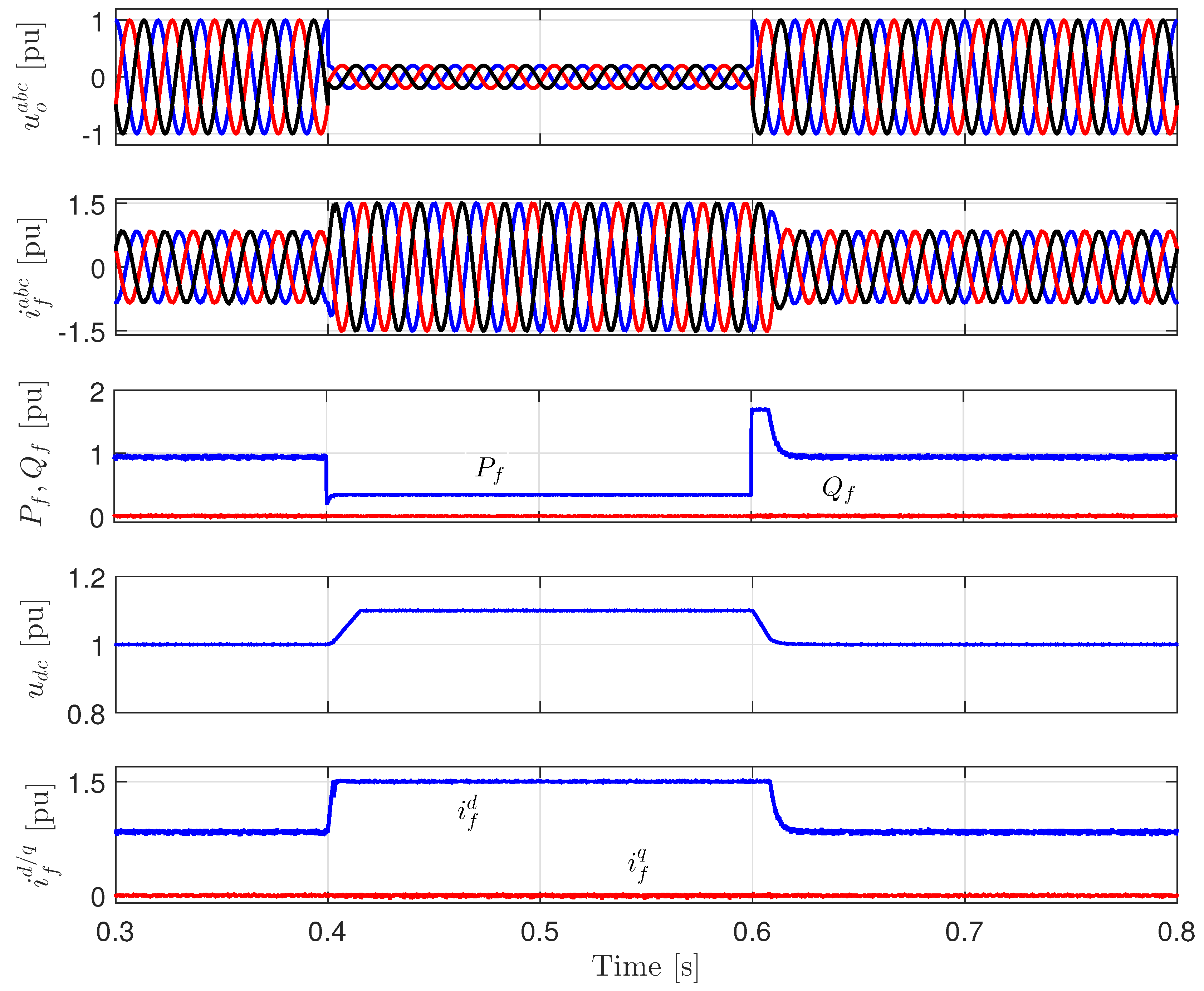
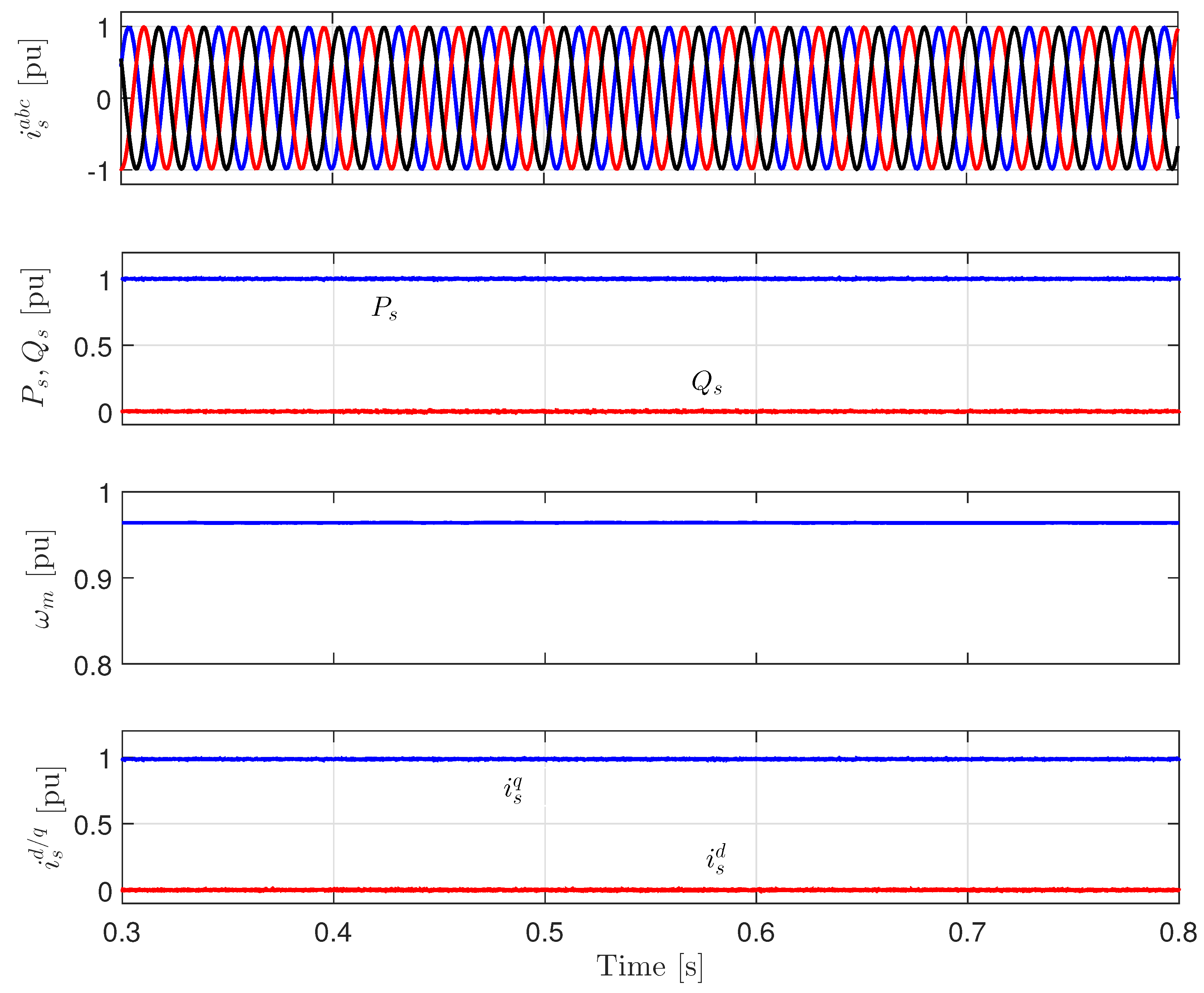
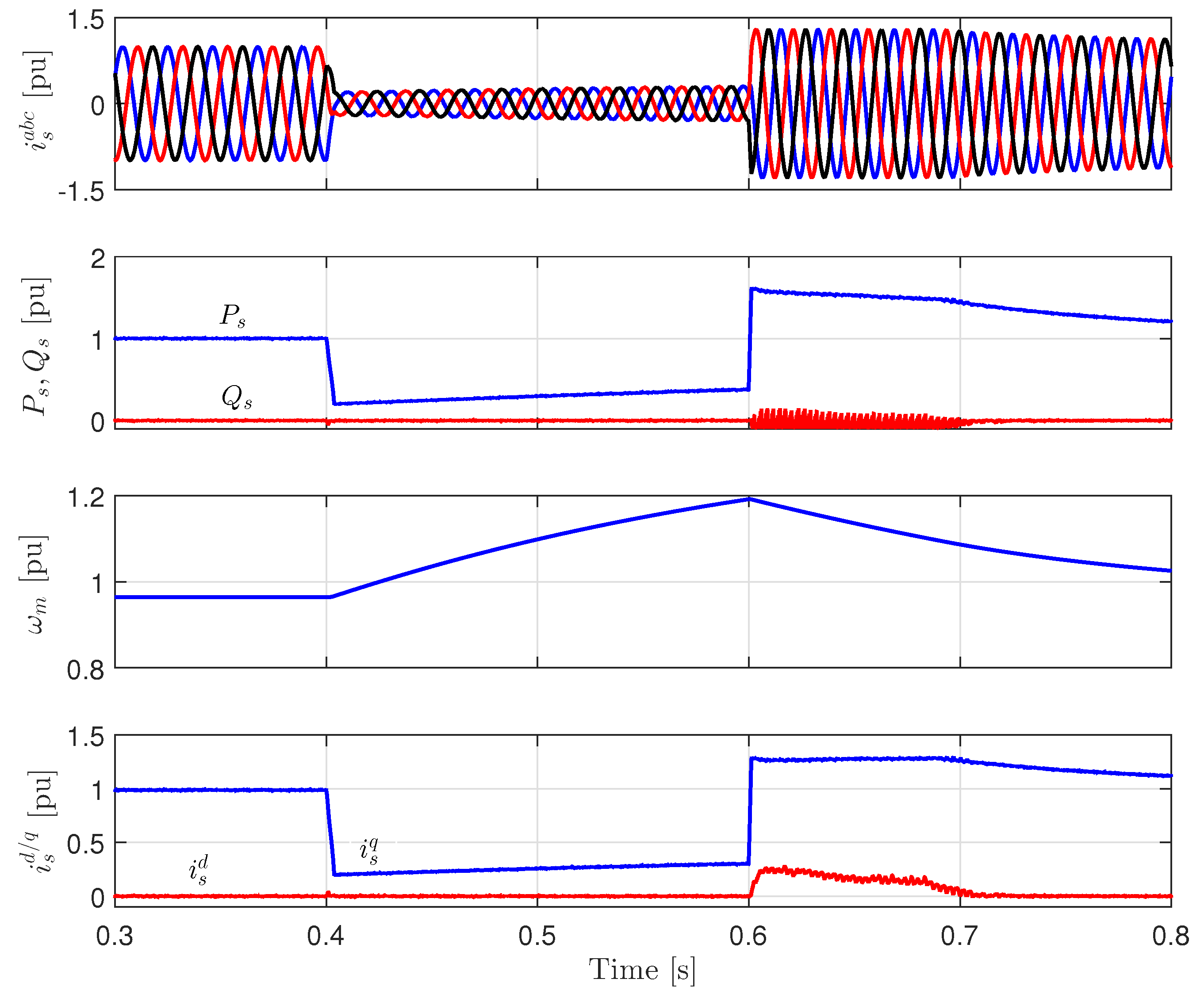
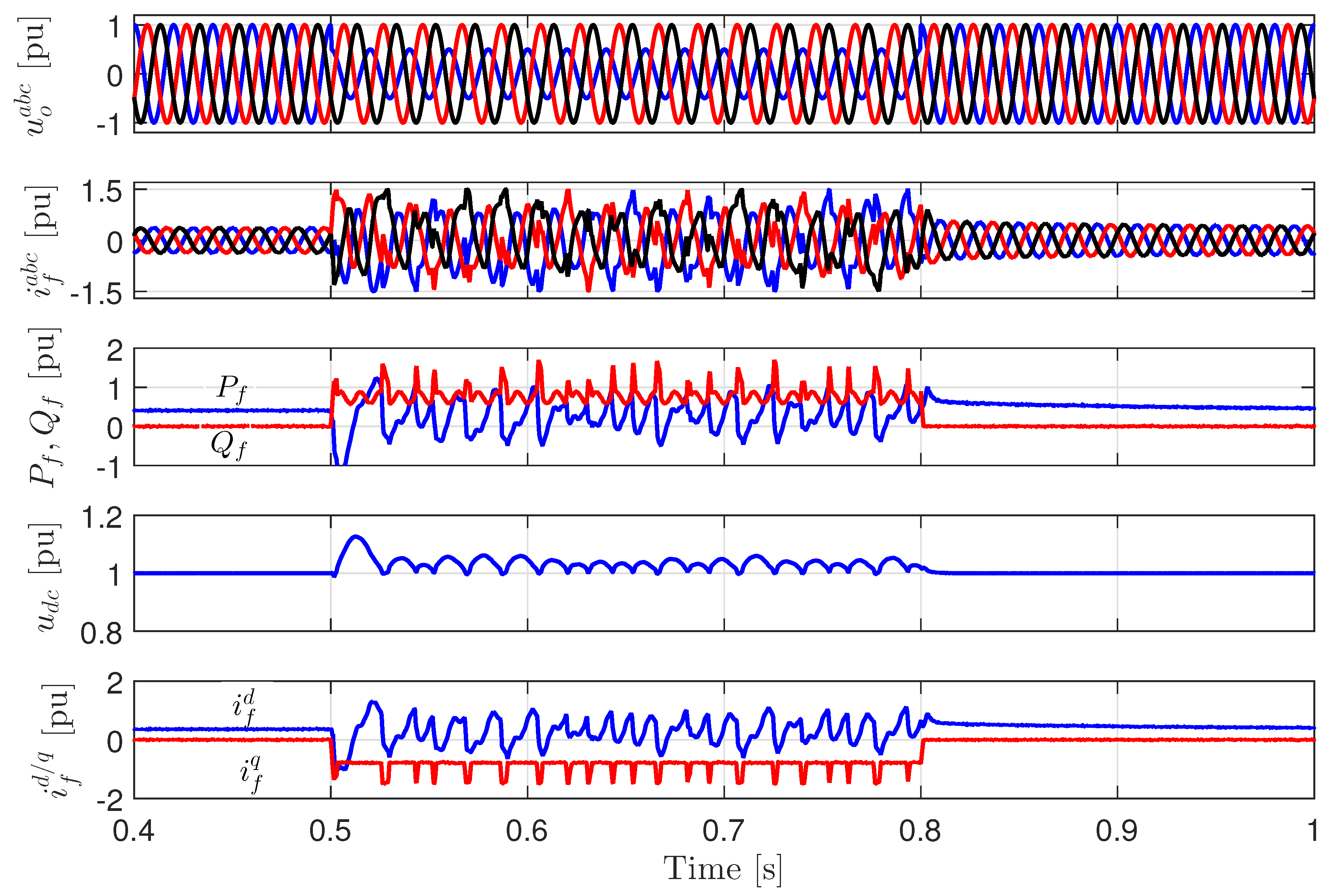
5. Simulation Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Liserre, M.; Cardenas, R.; Molinas, M.; Rodriguez, J. Overview of Multi-MW Wind Turbines and Wind Parks. IEEE Trans. Ind. Electron. 2011, 58, 1081–1095. [Google Scholar] [CrossRef]
- Li, H.; Chen, Z. Overview of different wind generator systems and their comparisons. IET Renew. Power Gener. 2008, 2, 123–138. [Google Scholar] [CrossRef]
- Hansen, A.; Iov, F.; Blaabjerg, F.; Hansen, L. Review of contemporary wind turbine concepts and their market penetration. J. Wind Eng. Ind. Aerodyn. 2004, 28, 247–263. [Google Scholar] [CrossRef]
- Global Wind Energy Council (GWEC). Global Wind Report 2015. Available online: http://www.gwec.net/ (accessed on 13 August 2016).
- Tsili, M.; Papathanassiou, S. A review of grid code technical requirements for wind farms. IET Renew. Power Gener. 2009, 3, 308–332. [Google Scholar] [CrossRef]
- Cardenas, R.; Pena, R.; Alepuz, S.; Asher, G. Overview of Control Systems for the Operation of DFIGs in Wind Energy Applications. IEEE Trans. Ind. Electron. 2013, 60, 2776–2798. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Kennel, R. Application of Extended Kalman Filter to Parameter Estimation of Doubly-Fed Induction Generators in Variable-Speed Wind Turbine Systems. In Proceedings of the 5th International Conference on Clean Electrical Power (ICCEP), Taormina, Italy, 16–18 June 2015.
- Abdelrahem, M.; Hackl, C.; Kennel, R. Sensorless Control of Doubly-Fed Induction Generators in Variable-Speed Wind Turbine Systems. In Proceedings of the 5th International Conference on Clean Electrical Power (ICCEP), Taormina, Italy, 16–18 June 2015.
- Chinchilla, M.; Arnaltes, S.; Burgos, J. Control of permanent magnet generators applied to variable-speed wind-energy systems connected to the grid. IEEE Trans. Energy Convers. 2006, 21, 130–135. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Zhang, Z.; Kennel, R. Sensorless Control of Permanent Magnet Synchronous Generators in Variable-Speed Wind Turbine Systems. In Proceedings of the Power and Energy Student Summit (PESS 2016), Aachen, Germany, 19–20 January 2016.
- Nasiri, M.; Milimonfared, J.; Fathi, S.H. A review of low-voltage ride-through enhancement methods for permanent magnet synchronous generator based wind turbines. Renew. Sustain. Energy Rev. 2015, 47, 399–415. [Google Scholar] [CrossRef]
- Conroy, J.; Watson, R. Low-voltage ride-through of a full converter wind turbine with permanent magnet generator. IET Renew. Power Gener. 2007, 1, 182–189. [Google Scholar] [CrossRef]
- Mendes, V.F.; Matos, F.F.; Liu, S.Y.; Cupertino, A.F.; Pereira, H.A.; de Sousa, C.V. Low Voltage Ride-Through Capability Solutions for Permanent Magnet Synchronous Wind Generators. Energies 2016, 9, 59. [Google Scholar] [CrossRef]
- Heng, N.; Jiao, L.; Peng, Z.; Yikang, H. Improved control strategy of an active crowbar for directly-driven PM wind generation system under grid voltage dips. In Proceedings of the International Conference on Electrical Machines and Systems (ICEMS), Wuhan, China, 17–20 October 2008.
- Nauyen, T.; Lee, D. Ride-through technique for PMSG wind turbines using energy storage systems. J. Power Electron. 2010, 10, 733–738. [Google Scholar] [CrossRef]
- Bolund, B.; Bernhoff, H.; Leijon, M. Flywheel energy and power storage systems. Renew. Sustain. Energy Rev. 2007, 11, 235–258. [Google Scholar] [CrossRef]
- Xu, G.; Xu, L.; Morrow, D. Wind turbines with energy storage for power smoothing and FRT enhancement. In Proceedings of the IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 24–29 July 2011.
- Peng, Y.; Li, Y.; Xu, Z.; Wen, M.; Luo, L.; Cao, Y.; Leonowicz, Z. Power Quality Improvement and LVRT Capability Enhancement of Wind Farms by Means of an Inductive Filtering Method. Energies 2016, 9, 302. [Google Scholar] [CrossRef]
- Mohod, S.W.; Aware, M.V. A STATCOM-control scheme for grid connected wind energy system for power quality improvement. IEEE Syst. J. 2010, 4, 346–352. [Google Scholar] [CrossRef]
- Wang, L.; Truong, D.N. Dynamic stability improvement of four parallel-operated PMSG-based offshore wind turbine generators fed to a power system using a STATCOM. IEEE Trans. Power Deliv. 2013, 28, 111–119. [Google Scholar] [CrossRef]
- Goweily, K.; El Moursi, M.; Abdel-Rahman, M.; Badr, M.A.L. Voltage booster scheme for enhancing the fault ride-through of wind turbines. IET Power Electron. 2015, 8, 1853–1863. [Google Scholar] [CrossRef]
- Causebrook, A.; Atkinson, D.J.; Jack, A.G. Fault ride-through of large wind farms using series dynamic braking resistors. IEEE Trans. Power Syst. 2007, 22, 966–975. [Google Scholar] [CrossRef]
- Tongzhou, J.; Xiongfeng, H.; Xianyun, L.; Kun, L.; Mei, Z. Performance analysis and research on LVRT of PMSG wind power system with SDBR. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014.
- Wu, Z.; Dou, X.; Chu, J.; Hu, M. Operation and Control of a Direct-Driven PMSG-Based Wind Turbine System with an Auxiliary Parallel Grid-Side Converter. Energies 2013, 6, 3405–3421. [Google Scholar]
- Huang, H.; Mao, C.; Lu, J.; Wang, D. Electronic Power Transformer Control Strategy in Wind Energy Conversion Systems for Low Voltage Ride-through Capability Enhancement of Directly Driven Wind Turbines with Permanent Magnet Synchronous Generators (D-PMSGs). Energies 2014, 7, 7330–7347. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, C.; Li, G. Power coordinated control of wind turbines with permanent magnet synchronous generator for low voltage ride through. In Proceedings of the IEEE Power & Energy Society General Meeting, National Harbor, MD, USA, 27–31 July 2014.
- Hansen, A.D.; Michalke, G. Modelling and control of variable-speed multi-pole permanent magnet synchronous generator wind turbine. Wind Energy 2008, 11, 537–554. [Google Scholar] [CrossRef]
- Alepuz, S.; Calle, A.; Busquets-Monge, S.; Kouro, S.; Wu, B. Use of Stored Energy in PMSG Rotor Inertia for Low-Voltage Ride-Through in Back-to-Back NPC Converter-Based Wind Power Systems. IEEE Trans. Ind. Electron. 2013, 60, 1787–1796. [Google Scholar] [CrossRef]
- Yaramasu, V.; Wu, B.; Alepuz, S.; Kouro, S. Predictive Control for Low-Voltage Ride-Through Enhancement of Three-Level-Boost and NPC-Converter-Based PMSG Wind Turbine. IEEE Trans. Ind. Electron. 2014, 61, 6832–6843. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Kennel, R. Model Predictive Control of Permanent Magnet Synchronous Generators in Variable-Speed Wind Turbine Systems. In Proceedings of the Power and Energy Student Summit (PESS 2016), Aachen, Germany, 19–20 January 2016.
- Mobarak, M.; Abdelrahem, M.; Stati, N.; Kennel, R. Model Predictive Control for Low-Voltage Ride-Through Capability Improvement of Variable-Speed Wind Energy Conversion Systems. In Proceedings of the IEEE International Symposium on Industrial Electronics (INDEL), Banja Luka, Bosnia and Herzegovina, 3–5 November 2016.
- Cortes, P.; Kazmierkowski, M.; Kennel, R.; Quevedo, D.; Rodriguez, J. Predictive Control in Power Electronics and Drives. IEEE Trans. Ind. Electron. 2008, 55, 4312–4324. [Google Scholar] [CrossRef]
- Linder, A.; Kanchan, R.; Kennel, R.; Stolze, P. Model-Based Predictive Control of Electric Drives; Cuvillier Verlag: Göttingen, Germany, 2010. [Google Scholar]
- Kouro, S.; Cortes, P.; Vargas, R.; Ammann, U.; Rodriguez, J. Model Predictive Control—A Simple and Powerful Method to Control Power Converters. IEEE Trans. Ind. Electron. 2009, 56, 1826–1838. [Google Scholar] [CrossRef]
- Rodriguez, J.; Cortes, P. Predictive Control of Power Converters and Electrical Drives, 1st ed.; Wiley-IEEE Press: New York, NY, USA, 2012. [Google Scholar]
- Zhang, Z.; Hackl, C.; Abdelrahem, M.; Kennel, R. Voltage Sensorless Direct Model Predictive Control of 3L-NPC Back-to-Back Power Converter PMSG Wind Turbine Systems with Fast Dynamics. In Proceedings of the Power and Energy Student Summit (PESS 2016), Aachen, Germany, 19–20 January 2016.
- Nguyen, T.-T.; Yoo, H.-J.; Kim, H.-M. Application of Model Predictive Control to BESS for Microgrid Control. Energies 2015, 8, 8798–8813. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Kennel, R. Encoderless Model Predictive Control of Doubly-Fed Induction Generators in Variable-Speed Wind Turbine Systems. In Proceedings of the Science of Making Torque from Wind (TORQUE 2016) Conference, Munich, Germany, 5–7 October 2016.
- Abdelrahem, M.; Mobarak, M.; Kennel, R. Realization of Low-Voltage Ride Through Requirements for PMSGs in Wind Turbines Systems Using Generator-Rotor Inertia. In Proceedings of the IEEE 9th International Conference on Electrical and Computer Engineering (ICECE), Dhaka, Bangladesh, 20–22 December 2016.
- Abdelrahem, M.; Hackl, C.; Kennel, R. Simplified Model Predictive Current Control without Mechanical Sensors for Variable-Speed Wind Energy Conversion Systems. Electr. Eng. J. 2016. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Nomenclature | Value |
|---|---|---|
| Wind turbine radius | 1.65 m | |
| Rated wind speed | 20 m/s | |
| PMSG rated power | 20 kW | |
| PMSG rated voltage (line–line) | 400 V | |
| Number of pair poles | 3 | |
| Stator resistance | 0.2 Ω | |
| Stator inductance | 15 mH | |
| Permanent magnet flux | 0.85 Vs | |
| PMSG moment of inertia | Θ | 0.9 |
| DC capacitor | 3 mF | |
| DC-link voltage | 700 V | |
| Grid line–line voltage | 400 V | |
| Grid normal frequency | 50 Hz | |
| Filter resistance | 0.16 Ω | |
| Filter inductance | 12 mH | |
| Sampling time | 40 μs | |
| Simulation step | 1 μs | |
| Base active power | 20 kW | |
| Base reactive power | 20 kvar | |
| Base current of the PMSG (peak) | 54 A | |
| Base mechanical speed | 102 rad/s | |
| Base DC-link voltage | 700 V | |
| Base line–line voltage of the grid | 400 V | |
| Base current of the GSC (peak) | 46 A |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdelrahem, M.; Kennel, R. Fault-Ride through Strategy for Permanent-Magnet Synchronous Generators in Variable-Speed Wind Turbines. Energies 2016, 9, 1066. https://doi.org/10.3390/en9121066
Abdelrahem M, Kennel R. Fault-Ride through Strategy for Permanent-Magnet Synchronous Generators in Variable-Speed Wind Turbines. Energies. 2016; 9(12):1066. https://doi.org/10.3390/en9121066
Chicago/Turabian StyleAbdelrahem, Mohamed, and Ralph Kennel. 2016. "Fault-Ride through Strategy for Permanent-Magnet Synchronous Generators in Variable-Speed Wind Turbines" Energies 9, no. 12: 1066. https://doi.org/10.3390/en9121066