1. Introduction
A photovoltaic (PV) power generation system is composed of a PV module array, a power conditioner, and a power transmission and distribution system. Because the output power of a PV module array changes substantially under the effect of insolation and environmental temperature changes [
1], power conditioners not only function as inverters, but also require a maximum power point (MPP) tracker to control the PV module array. Consequently, power loss in the PV module array can be reduced while maintaining MPP output under different environmental conditions.
Different sets of power–voltage (
P–V) characteristic curves can be generated for different insolation and environmental temperature. To ensure the maximum power output, the duty cycles of a power converter are commonly adopted. Concerning conventional maximum power point tracking (MPPT) techniques, they include the most frequently adopted perturb and observe (P&O) [
2,
3,
4] and incremental conductance (INC) [
5,
6] methods. Although the P&O method is simple and involves only a few parameters, a drawback of this method is that users must choose between tracking speed and number of oscillations, in which favorable performance of one comes at the expense of the other. By contrast, the INC method improves tracking speed but features unfavorable tracking stability because precision sensors are required to measure the conductance. Moreover, when PV array modules are faulty or subjected to partial shading, the corresponding
P–V characteristic curves exhibit multiple peaks [
7]. Thus, applying these two conventional MPPT methods generates local MPPs rather than global MPPs. Shaded modules in a PV array are known to incur mismatching problems. In this context, the global MPP cannot be successfully tracked using a typical Field MPPT, that is to say, deteriorated power generation efficiency, due to the multiple peaks on a
P–V characteristic curve. A distributed maximum power point tracker (DMPPT) was proposed as a way to resolve this mismatching problem and hence to elevate the overall power generation efficiency [
8,
9]. However, a clear disadvantage of a DMPP tracker is a rise in the cost and more room occupied. For this sake, to develop a low cost, but high performance, global MPP tracker to deal with the multi-peak problems on a
P–V characteristic curve for the optimal performance of a PV array is an important research effort.
In recent years, numerous scholars have investigated MPPT methods for PV module arrays exhibiting multiple peaks under partial shading. Commonly adopted intelligent algorithms include the differential evolution (DE) [
10], the ant colony optimization (ACO) [
11], and the artificial bee colony (ABC) algorithms [
12]. The DE algorithm, similar to a genetic algorithm [
13,
14], performs real number coding on selected groups to search for a global optimal solution through the differential calculation of variance and one-to-one competitive survival strategies. However, as demonstrated in [
15], only simulation results were presented. In addition, individual mutation strategies were based on a total of five equations proposed by Storn [
16], which not only increases tracking-time calculations, but also requires a more accurate comparison between population codes during crossover coding with microcontrollers. The ACO algorithm is a probabilistic path optimization algorithm based on the foraging behaviors of ants. The pheromones that ants lay down when they find food are used as a food-source indicator, with which other ants can determine the optimal food-finding path; this conserves time otherwise spent on random searching. In [
17], pheromone update equations were expressed as exponential functions that yielded random values for transitioning between controlling the pheromone density and path length. Although this approach eliminates the possibility of identifying local optimal solutions, calculating the path length by using exponential functions requires considerably longer tracking time. The ABC algorithm transmits information regarding the quality and position of a food source through the “dance” performed by employed bees, which are responsible for finding larger food sources to increase profitability during the colony food-finding optimization process [
18]. However, the employed bee phase relies on random values, resulting in an unstable searching capacity. In addition, in the scout phase, the number of bees selected affects the tracking speed and steady-state performance. As mentioned in [
18], obtaining the statistical results of ABC and particle swarm optimization (PSO) algorithms requires 5–6 s, indicating that the tracking response speed can be improved. Moreover, scholars have proposed incorporating intelligent algorithms with conventional MPPT algorithms [
19,
20,
21,
22], such as incorporating PSO or genetic algorithms with P&O. Although the incorporated methods can successfully identify global optimal solutions, the dynamic response speed is too slow.
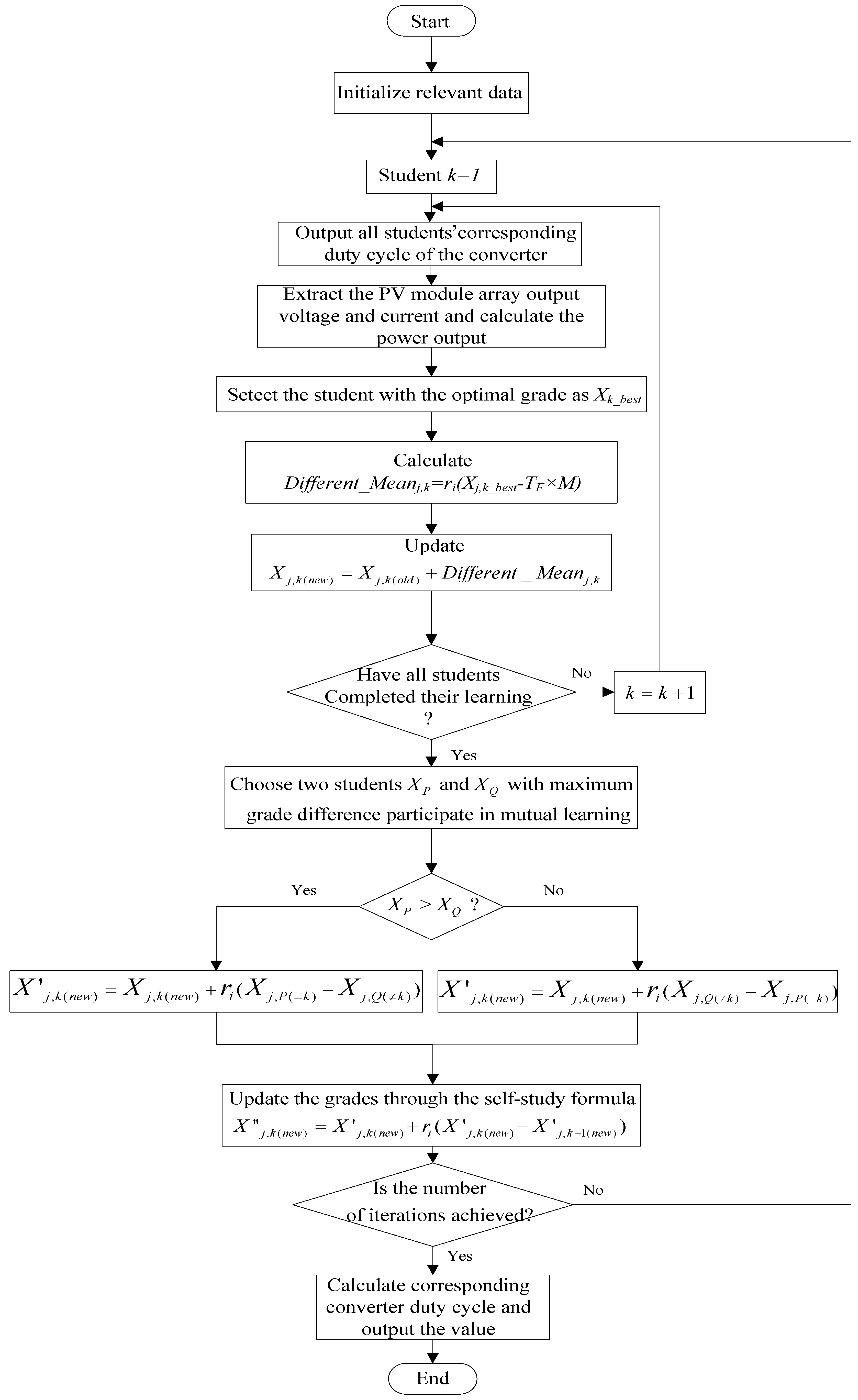
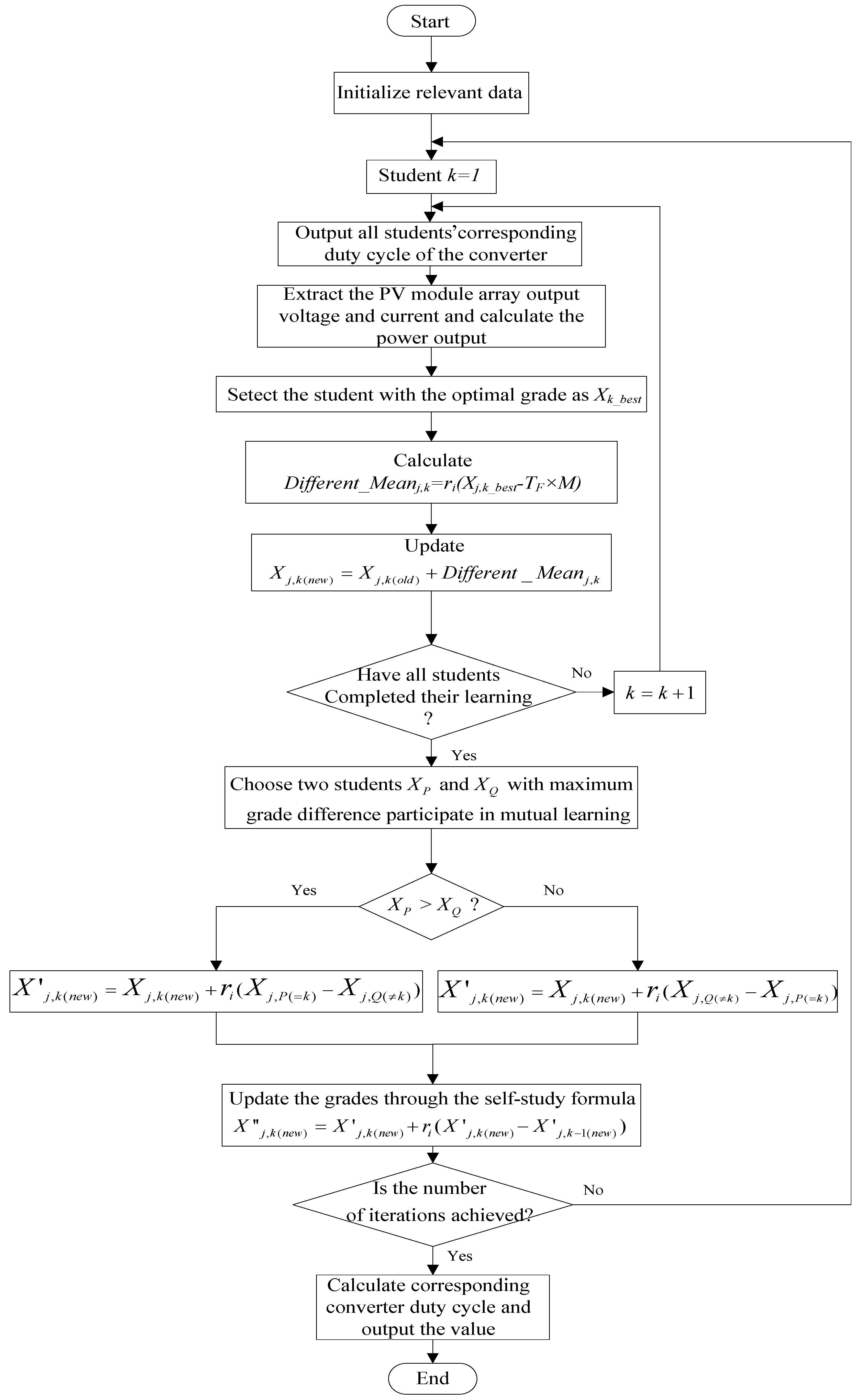
To address these problems, the present study incorporated a novel teaching-learning-based optimization (TLBO) method [
23,
24] to track the MPPs of a PV module array subjected to partial shading. The proposed method is advantageous because of its independence from population optimization, high adaptability, few design parameters, simple algorithm, and ease of understanding. In the present study, a conventional TLBO algorithm [
25] was modified to improve the convergence and reduce the tracking time to obtain a more efficient algorithm than extant MPPT algorithms. The proposed algorithm improves MPPT tracking effectiveness for PV module arrays exhibiting multiple peaks in their
P–V characteristic curves.
2. Fault and Shading Characteristics of PV Module Arrays
To increase the power output of a PV power generation system, PV modules are generally combined in serial and parallel configurations. However, external environments can cause shading because of dust, stains, and tall buildings, which generates nonlinear changes and multiple peaks in
P–V characteristic curves. To examine the
P–V and
I–V output characteristics of serial and parallel PV module arrays subjected to partial shading, the SANYO HIP 2717 module [
26] was adopted and various shading ratios were used. In addition, various arrays of serial and parallel configurations were tested.
Table 1 lists the electricity parameter specifications of a single module under standard test conditions (i.e., air mass of 1.5, irradiance of 1000 W/m
2, and PV module temperature of 25 °C) [
26].
2.1. PV Module Simulator Circuit
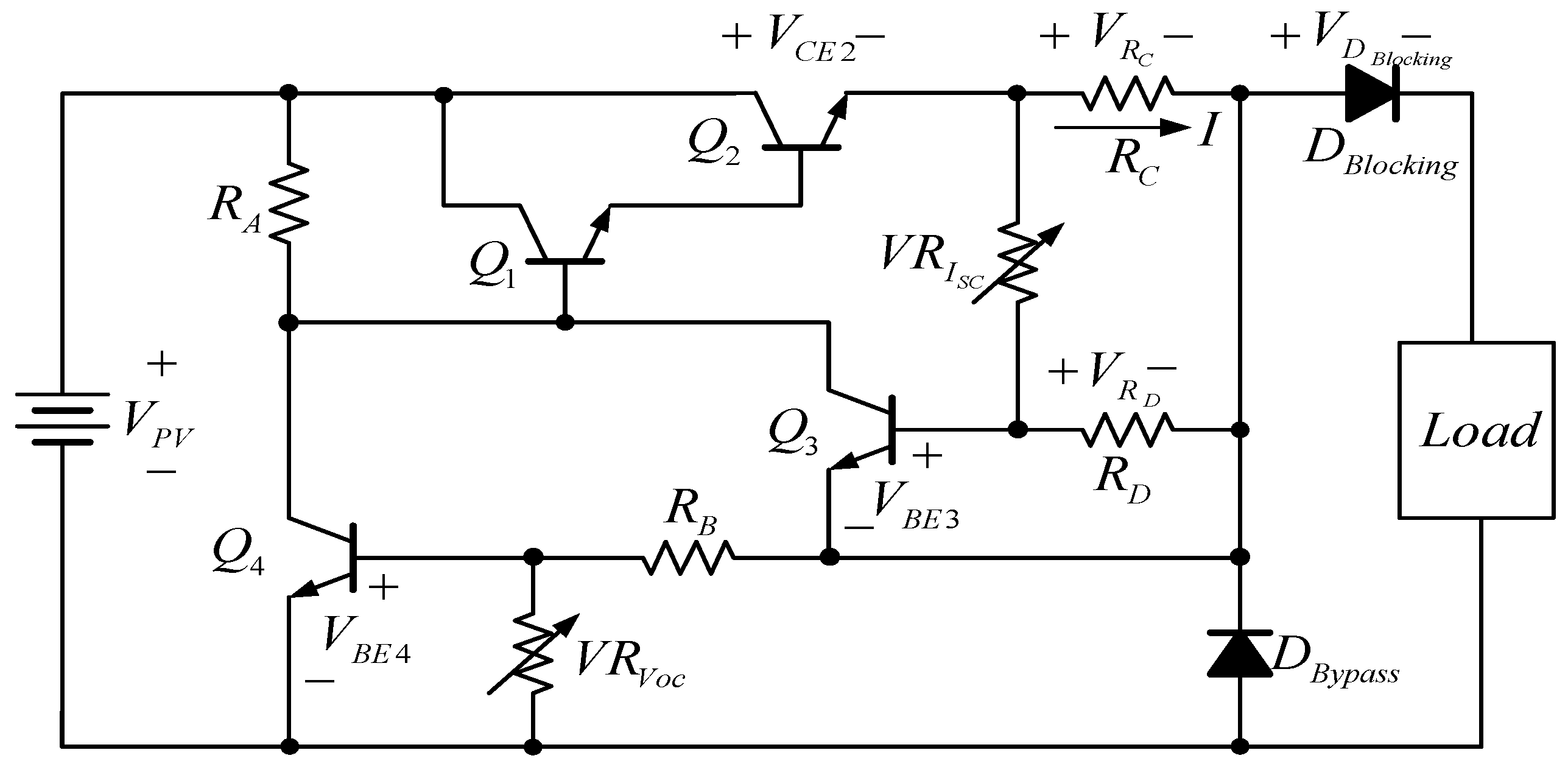
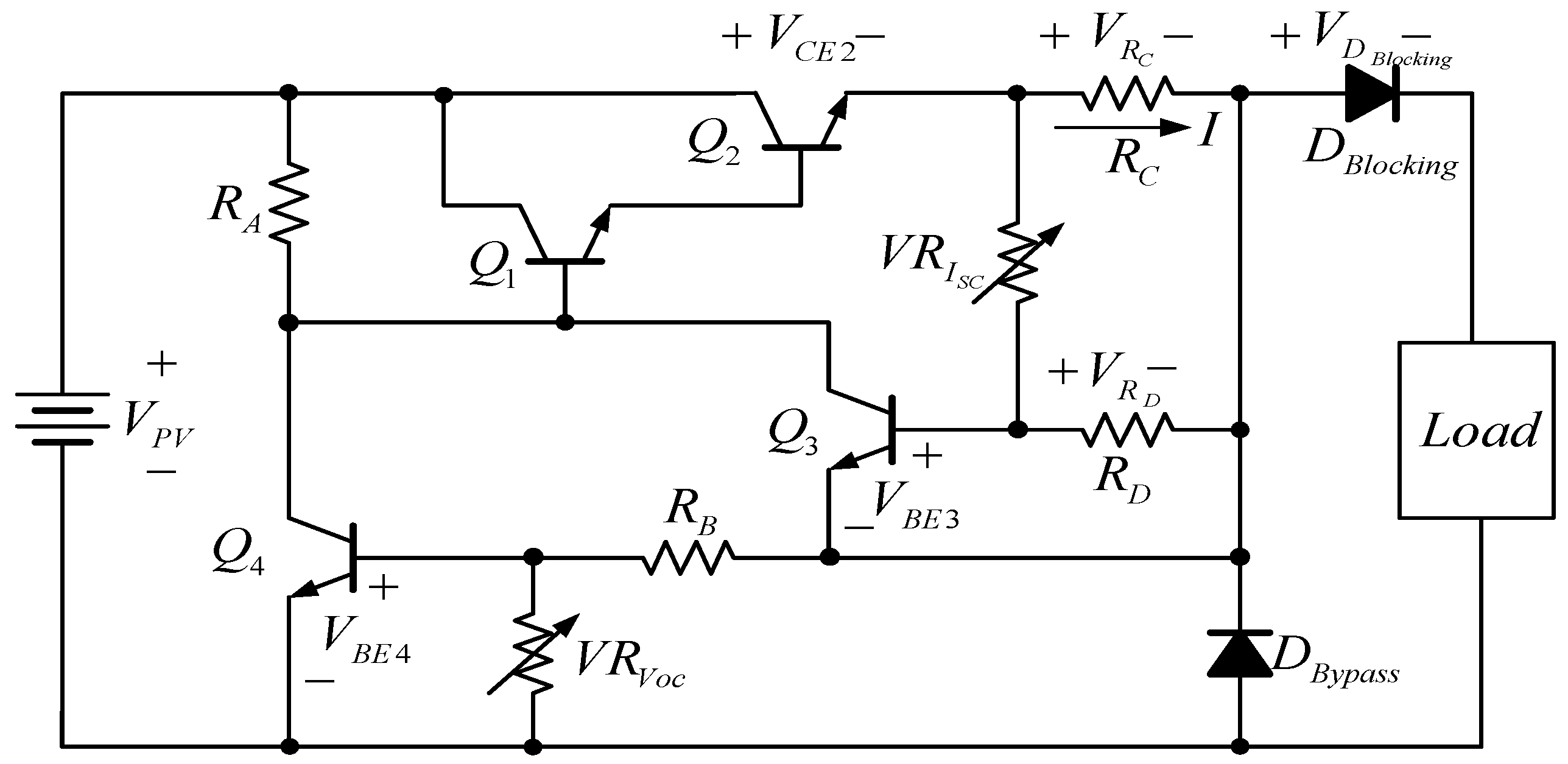
The present study adopted the circuit of a PV module simulator with adjustable shading ratios [
27], as shown in
Figure 1. The circuit structure primarily comprises a Darlington amplifier, a current limiting circuit, and a voltage regulator for attaining PV module output characteristics under varying shading ratios, which were created by adjusting variable resistors
VRIsc and
VRVoc. The variable resistor
VRVoc shown in
Figure 1 controls the open-circuit voltage of the PV module. When the circuit is open, a current-limiting transistor
Q3 is operated at the cutoff region. The open-circuit voltage is calculated using Equation (1):
Short-circuit currents can be calculated by adjusting
VRIsc to operate the current limiting transistor
Q3 at the saturation region when the
VBE3 voltage drop crosses over
RD. The short-circuit current is calculated using Equation (2):
If the VPV power source is not provided, the PV module simulator generates zero power output, which is equivalent to the fault situation of the PV module. Using a bypass diode DBypass can ensure that PV module arrays generate a certain amount of power during fault events. Accordingly, the electricity parameters of PV modules can be employed to set the required PV module output characteristics.
2.2. PV Module Array Fault and Shading Characteristics Analysis
2.2.1. PV Module Array Characteristics without Faults or Shading
When a PV module array has M serial and N parallel arrays without shading or faults and the MPP voltage, MPP current, and MPP power are respectively denoted as Vmp, Imp, and Pmp, the MPP voltage, MPP current, and MPP power of the M serial and N parallel arrays are expressed as M × Vmp, N × Imp, and M × N × Pmp, respectively.
2.2.2. PV Module Array Characteristics with Faults or Shading
In a PV module array, fault or shading incidences in a module can decrease the power output of the array. Similar to an actual module, a PV module simulator enables a fault module to form a loop through a bypass diode. Using a bypass diode not only ensures that the PV module array maintains a certain level of power generation, but that it also has little effect on the MPPT. However, when the module is under partial shading, the output voltage and current decrease, causing multiple peaks in the P–V characteristic curves of the PV module array, which prevents conventional MPP trackers from controlling the module array to operate at the actual MPPs.
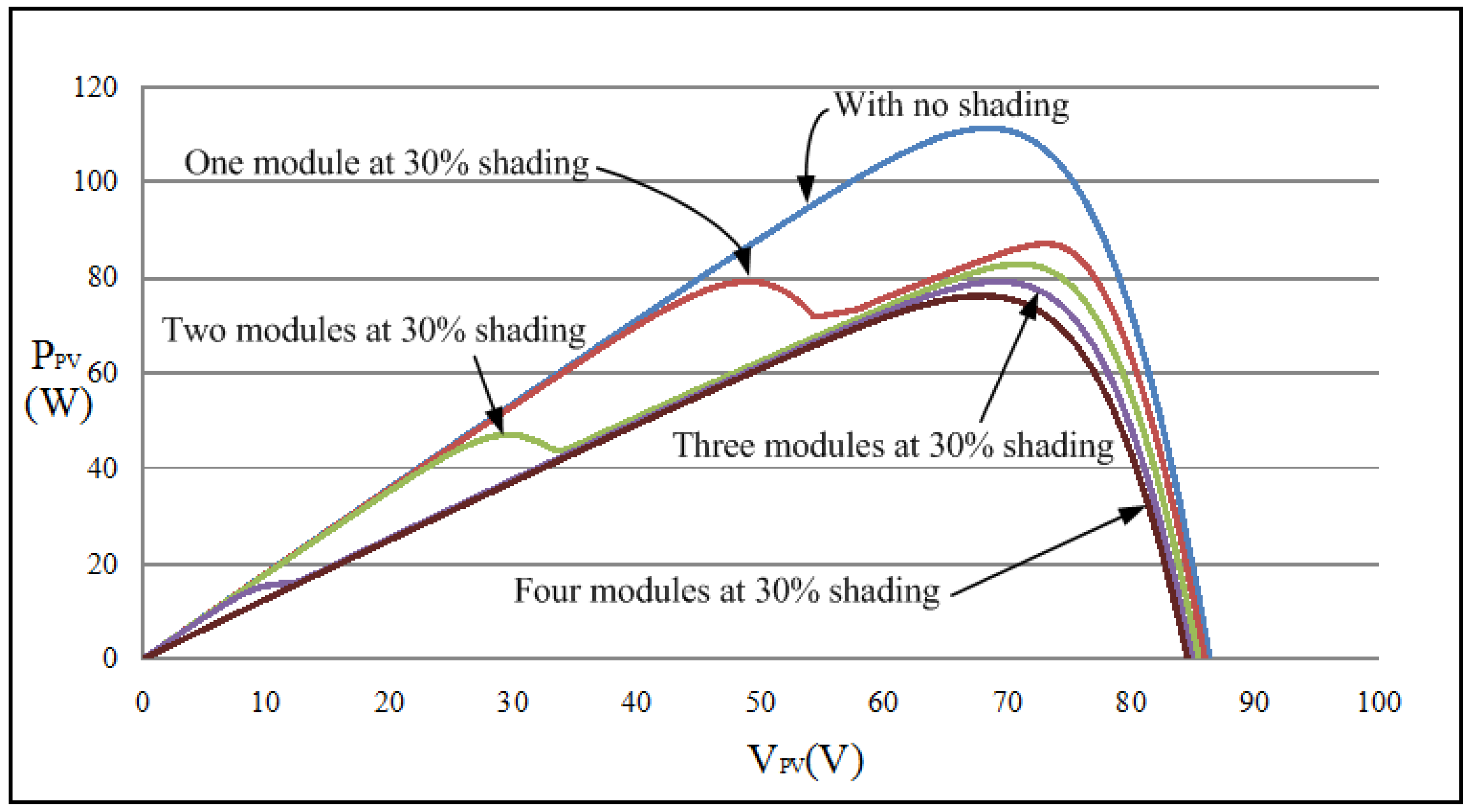
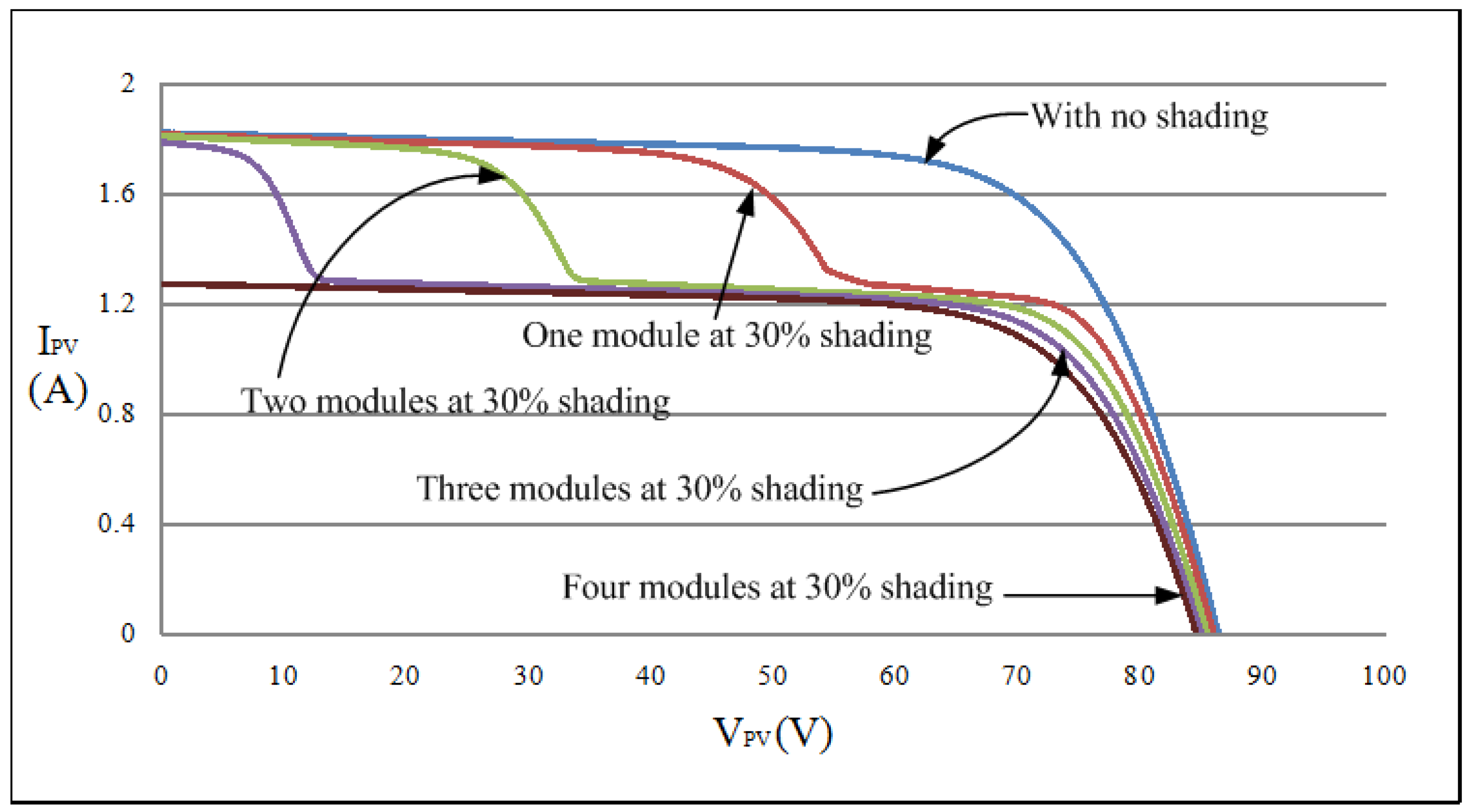
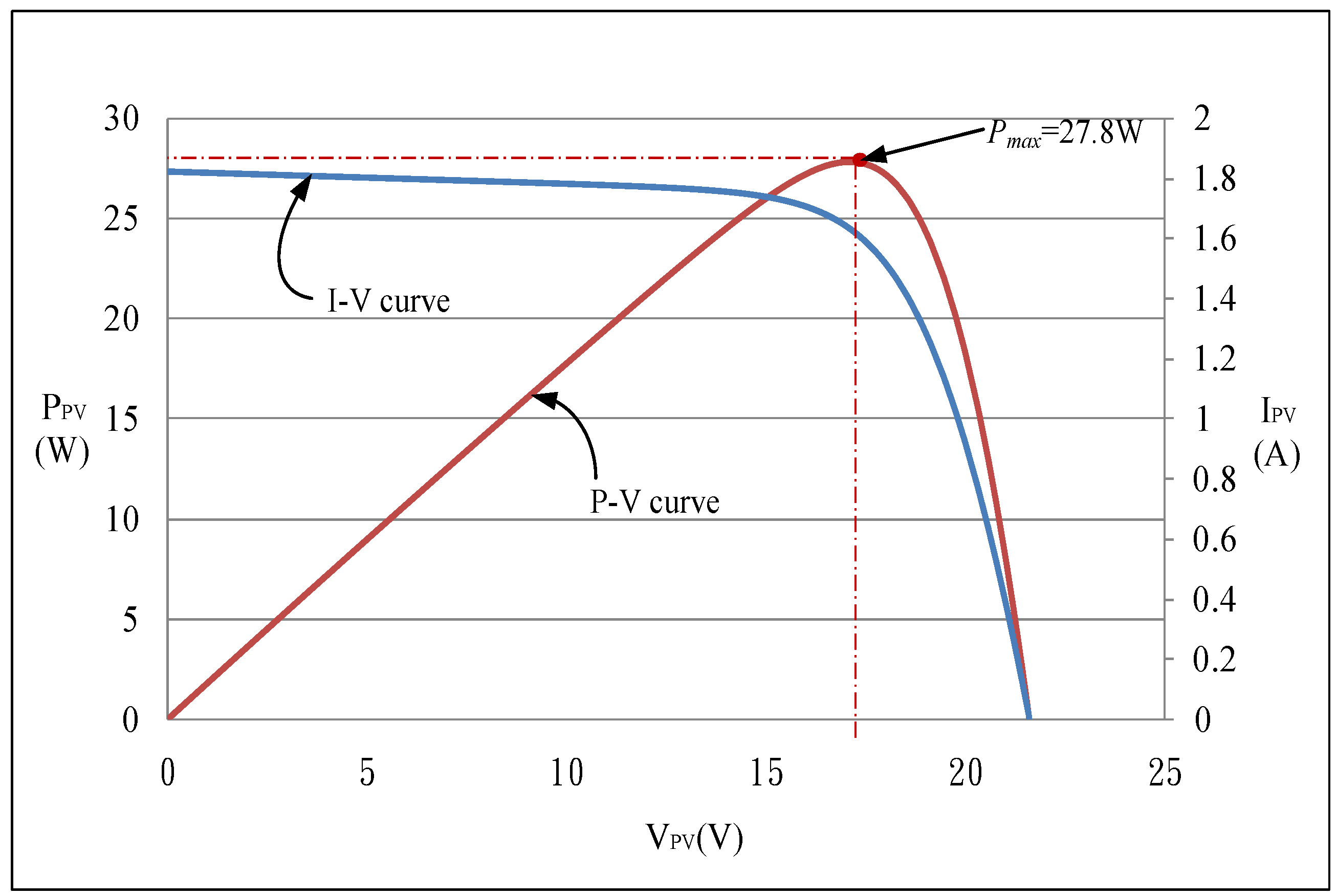
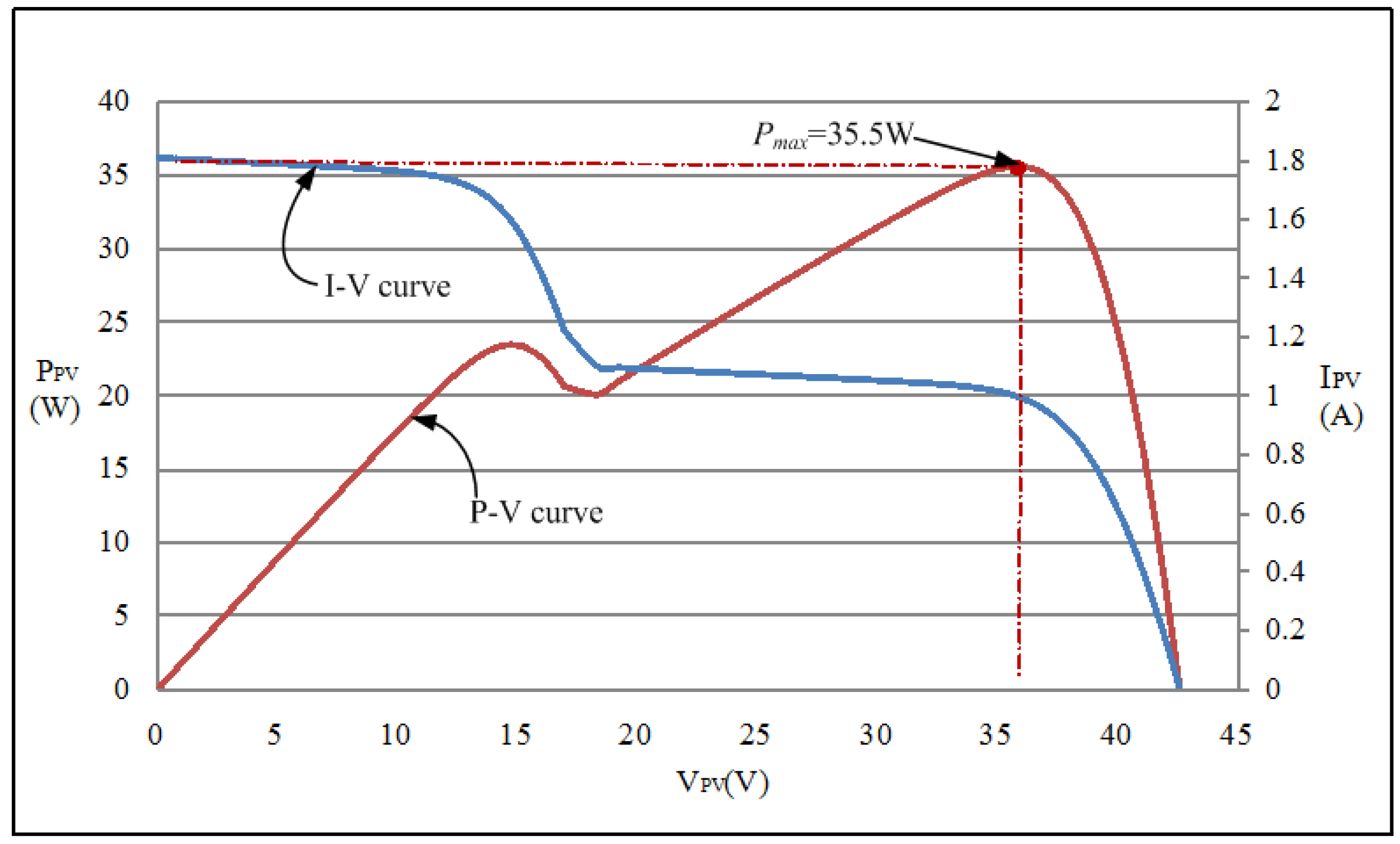
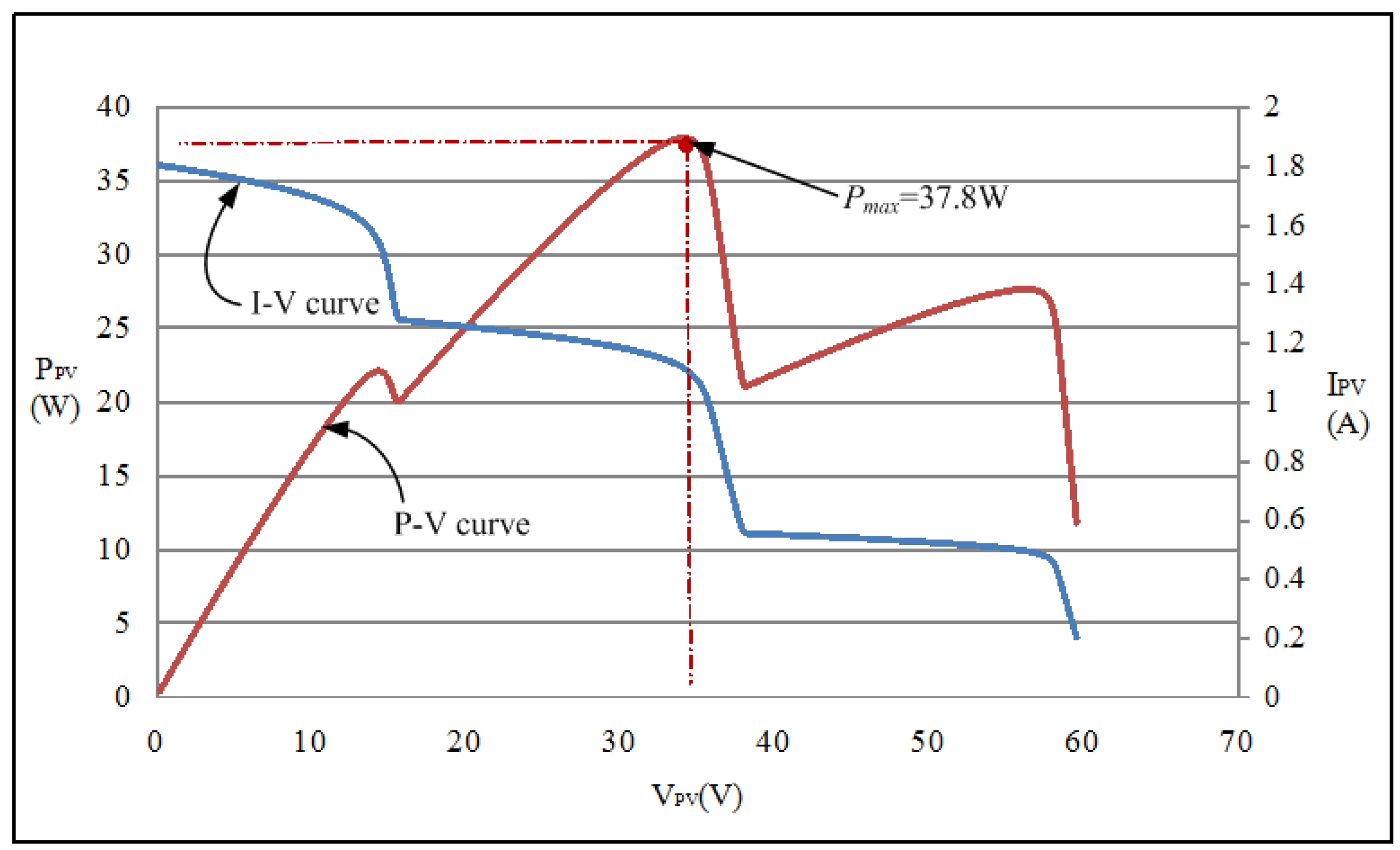
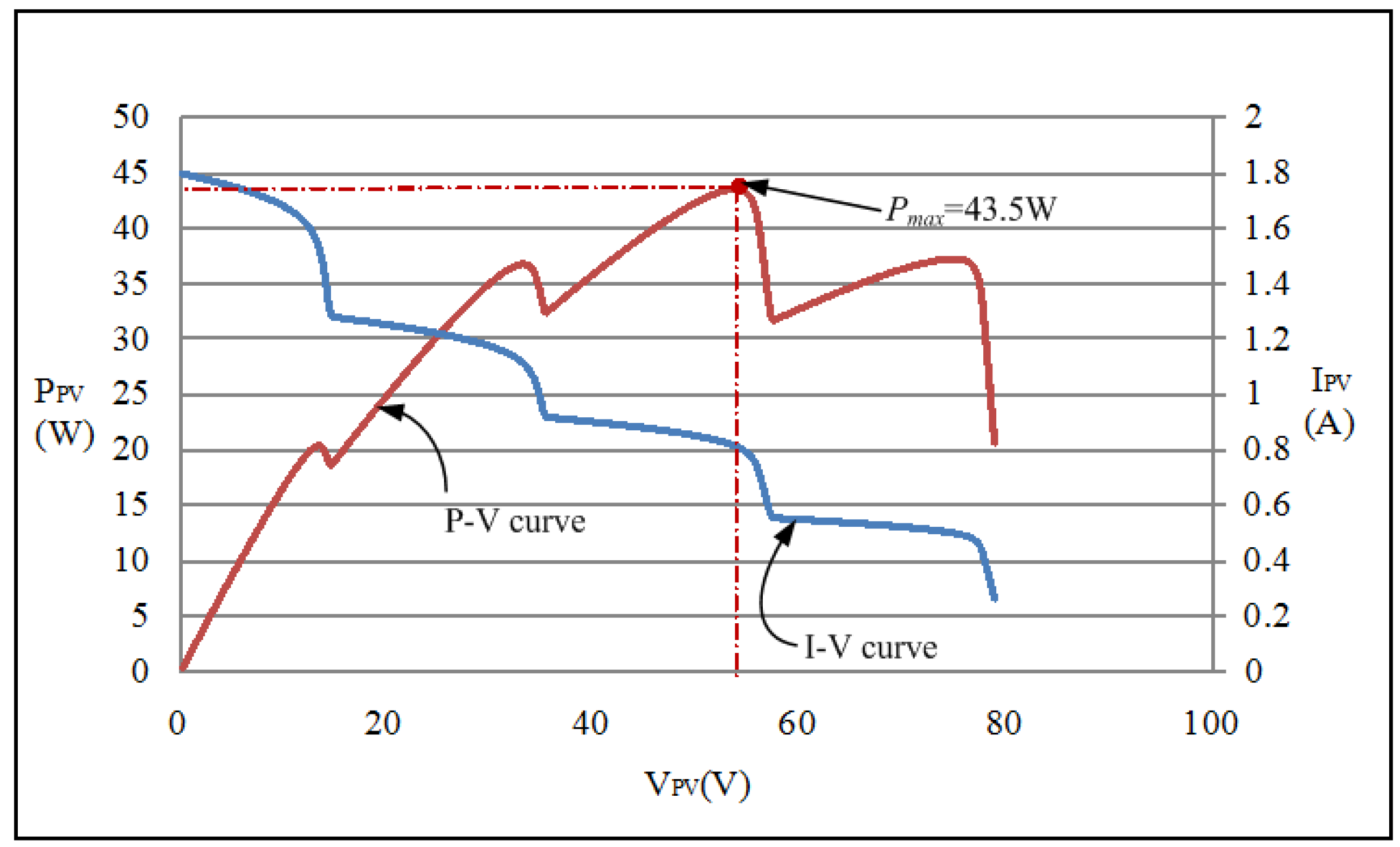
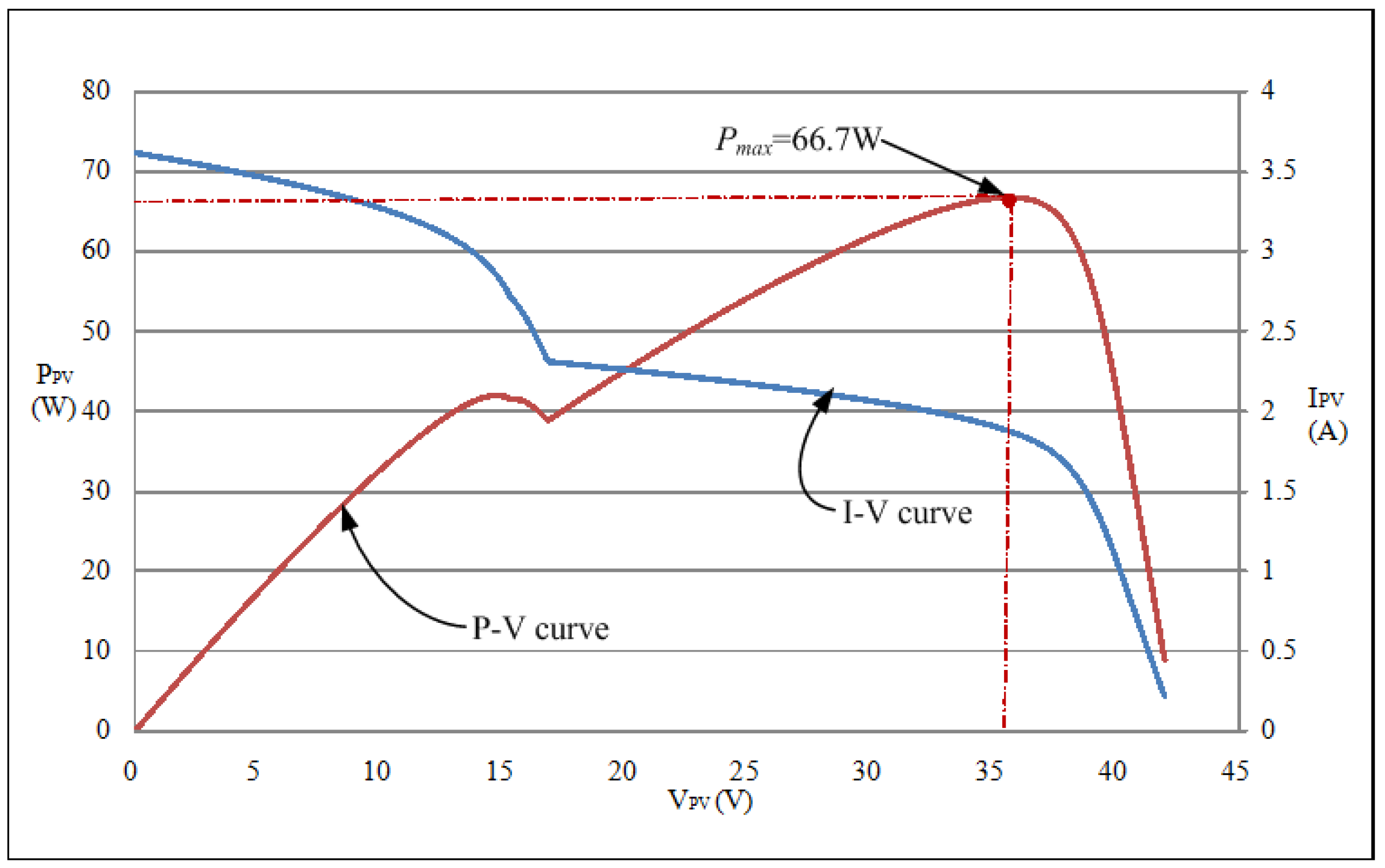
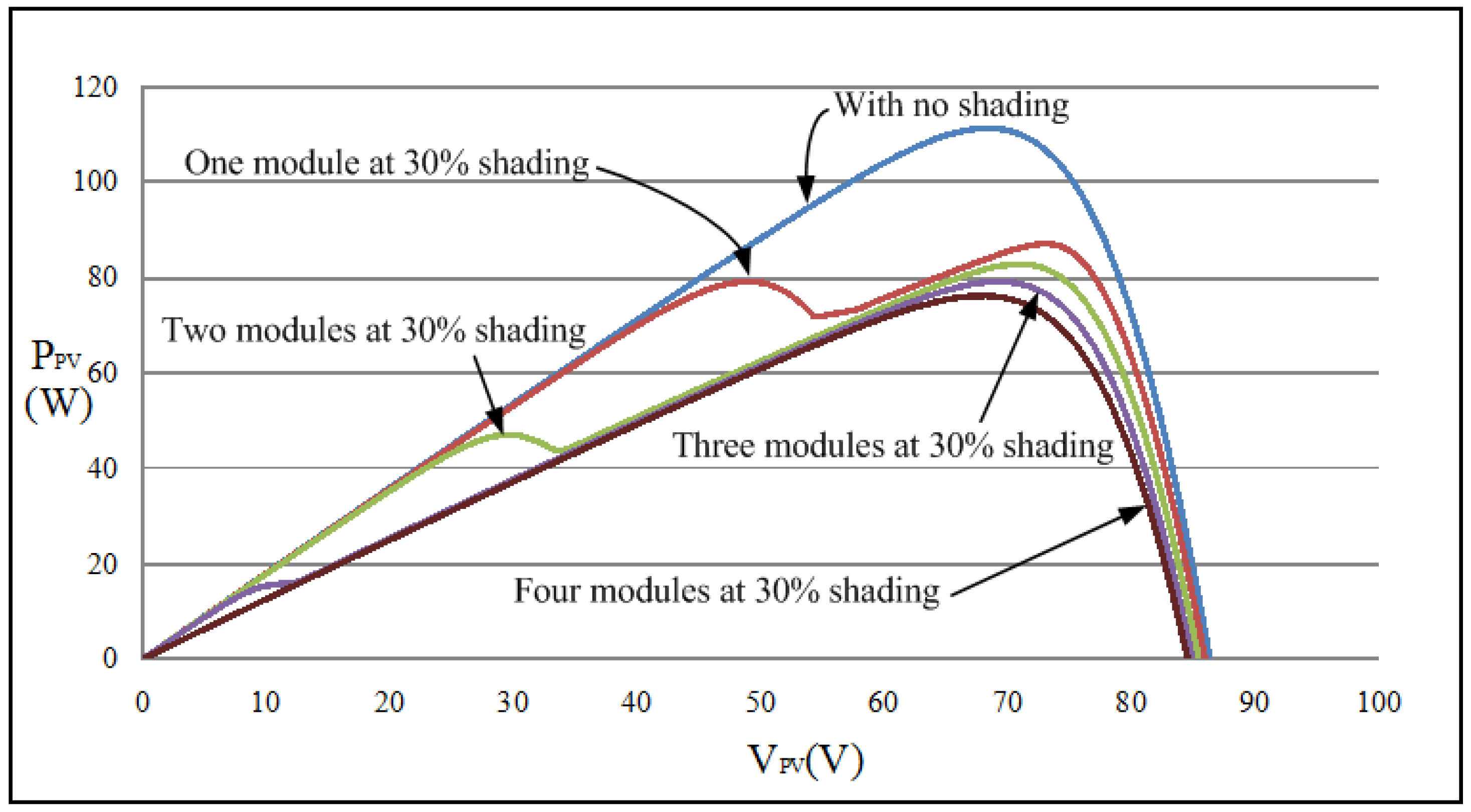
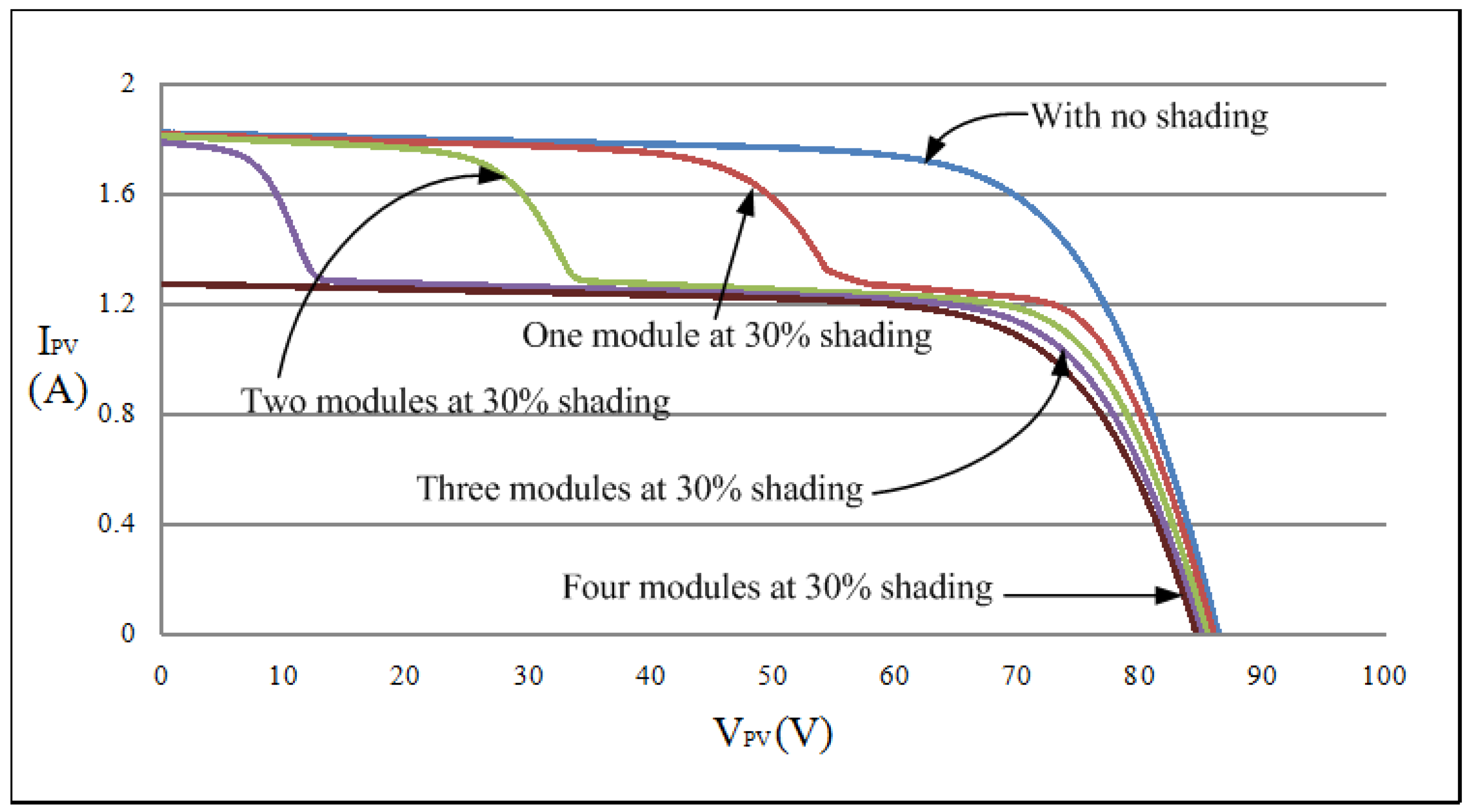
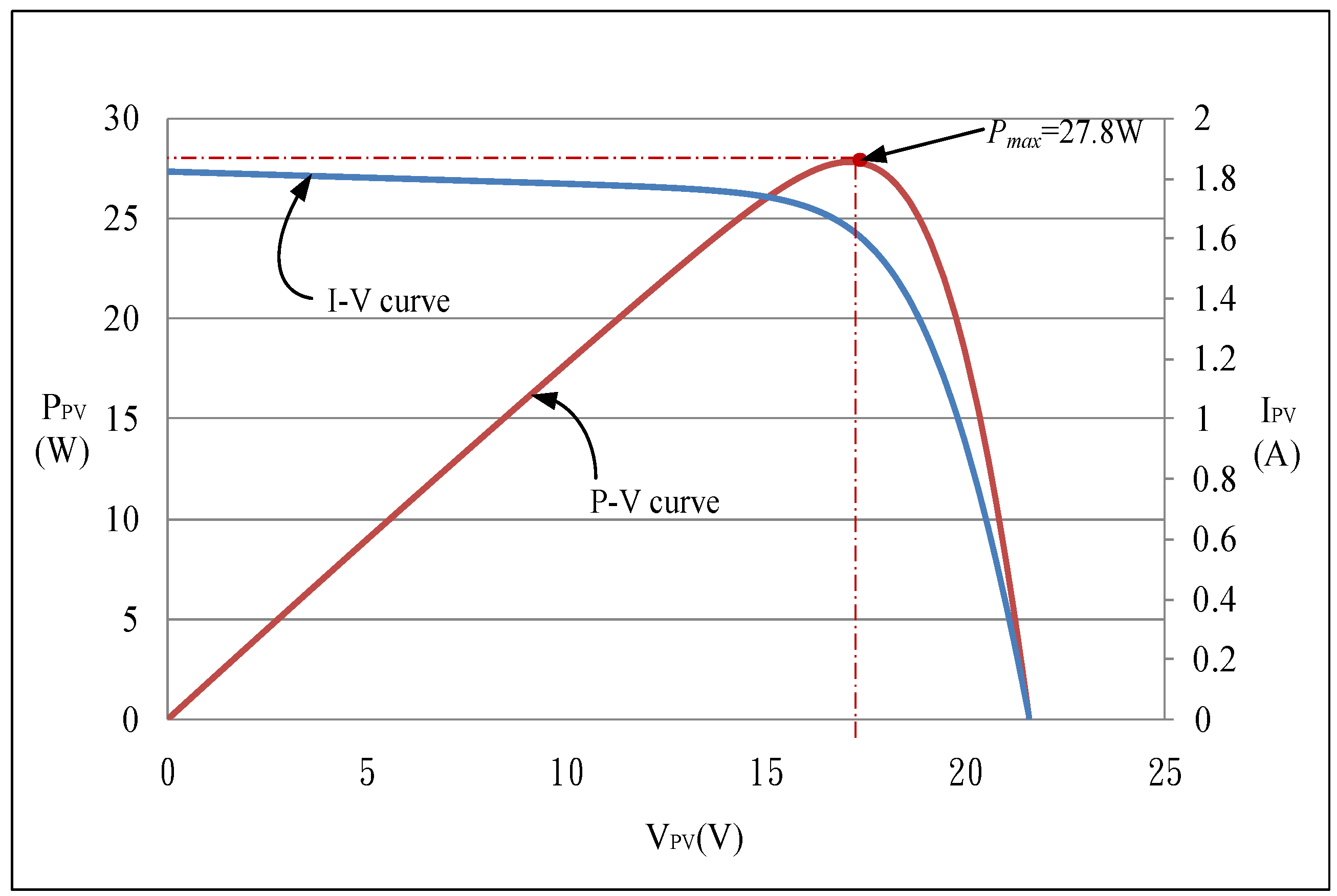
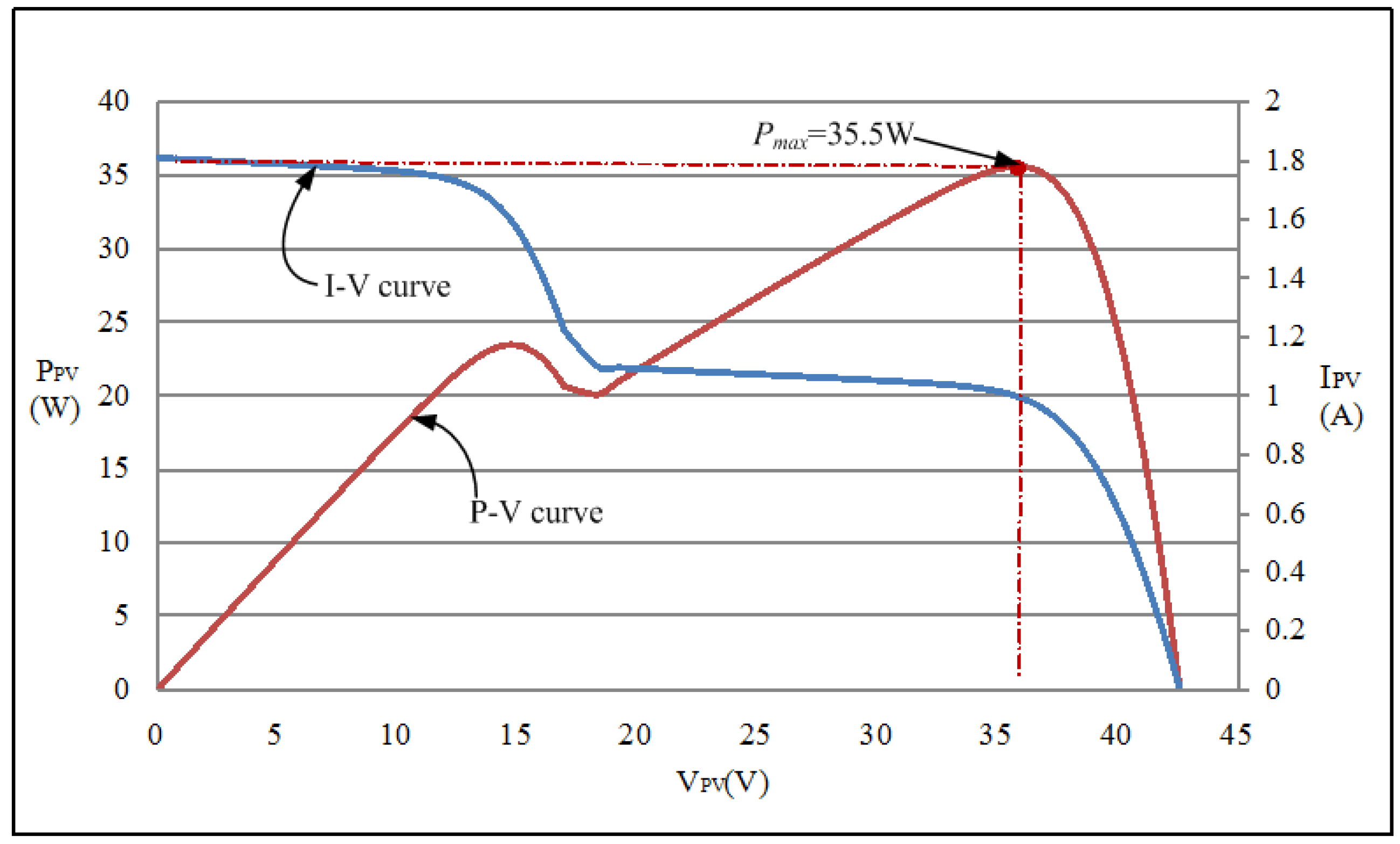
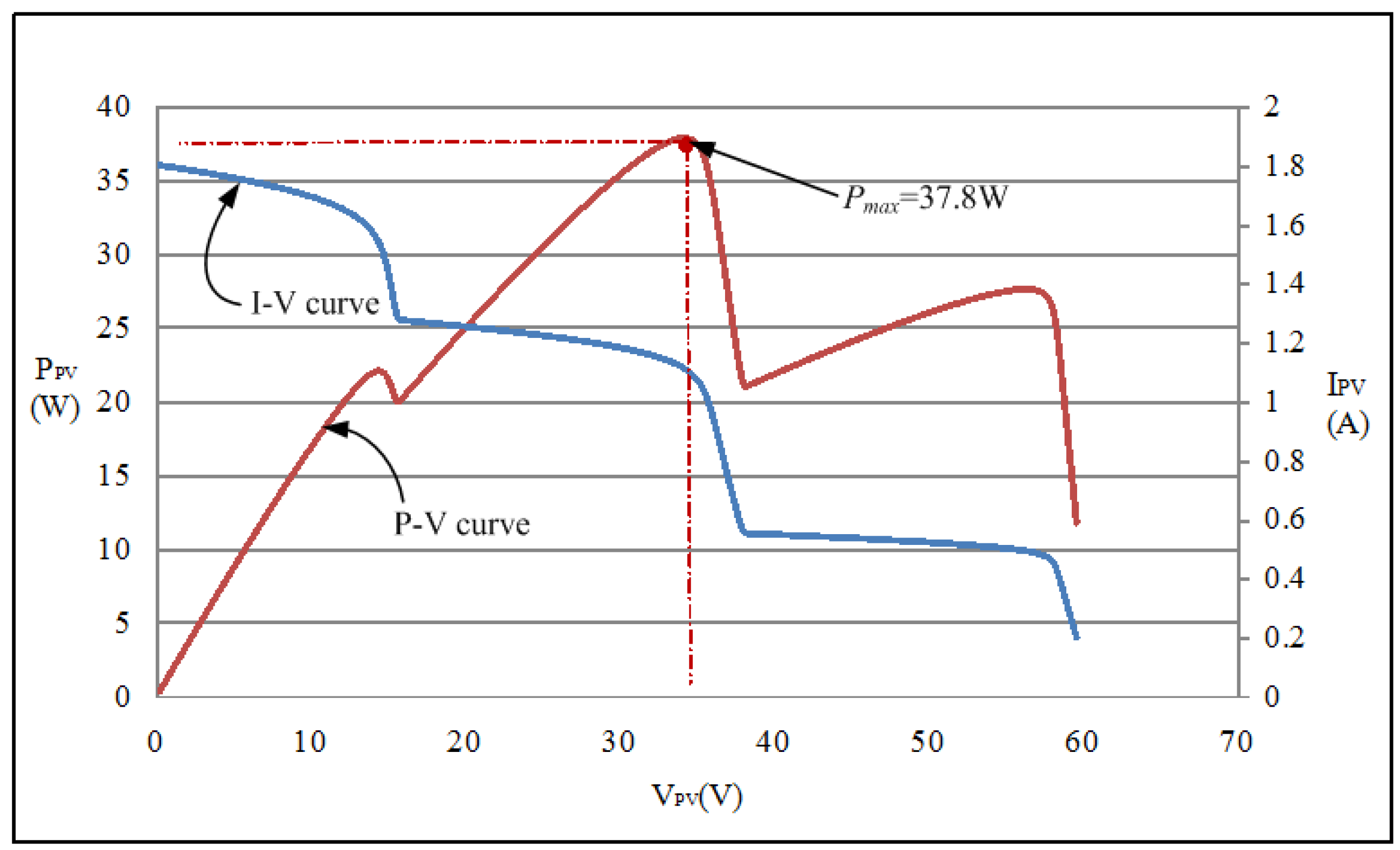
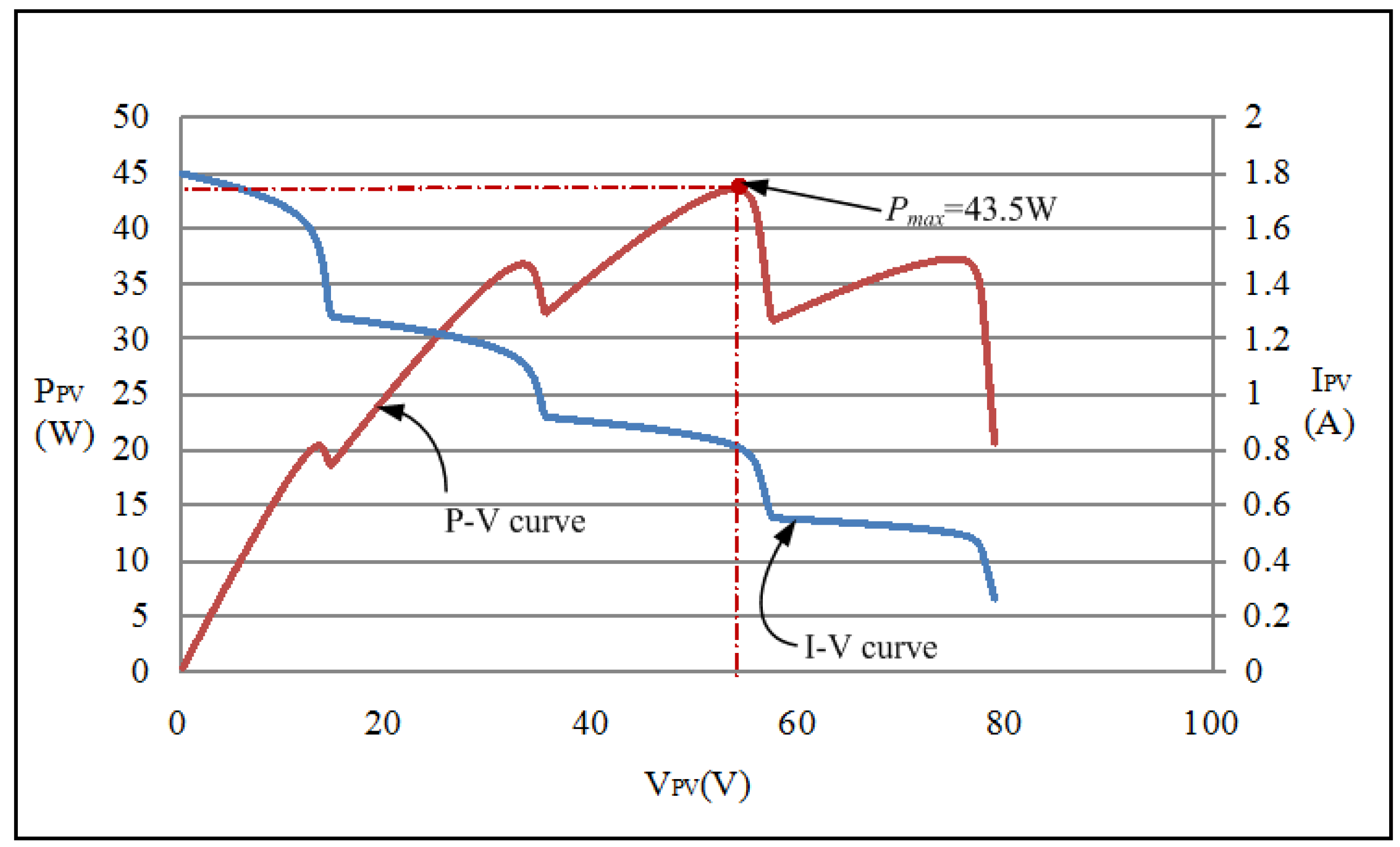
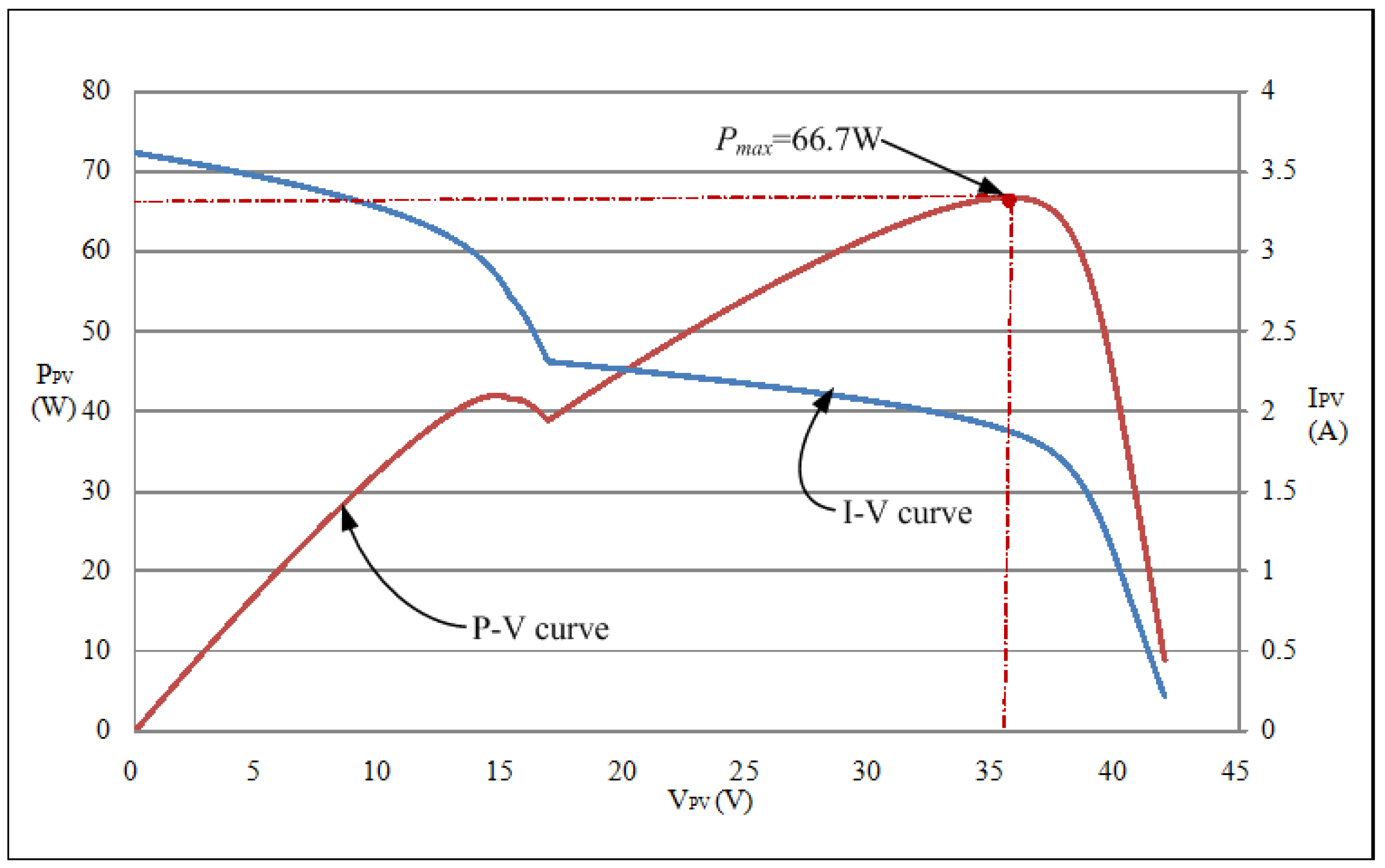
Given the aforementioned features of PV module arrays, the SANYO HIP 2717 module simulator was used to compose PV module arrays with different serial and parallel configurations under distinct shading ratios to perform a MPPT test. As shown in
Figure 2 and
Figure 3, SANYO HIP 2717 PV modules, built using the Solar Pro software [
28], were adopted to compose a four-serial and one-parallel array. The
P–V characteristic curves of an array with different numbers of muddles under a shading ratio of 30% were simulated. According to
Figure 2 and
Figure 3, partial shading of the modules in the array resulted in multiple peaks on the
P–V characteristic curves, and the maximum power point (MPP) decreased with an increase in the number of modules under shading.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}