1. Introduction
Hydraulic turbines are used extensively to stabilize power grids, because they can restart rapidly and/or change the power output according to the real-time demand. In recent years, a continuous increase in grid-connected wind and solar power has resulted in problems related to power grid stability and reliability. There have been an increasing number of incidents of power fluctuations in the grid network [
1]. When the grid parameters fluctuate beyond a manageable limit, the generator of the hydraulic turbine automatically disconnects from the grid, resulting in an unexpected transition into no load conditions (
i.e., total load rejection). Consequently, the turbine runner accelerates to a runaway speed within a few seconds [
2,
3]. The runaway speed is generally more than 150% of the synchronous speed. However, the acceleration rate for axial and other radial flow turbines may vary because this rate depends on the rotating masses, the load and the operating condition. Under common conditions, stable runaway is only reached if after a load rejection, the control and protection mechanisms both fail and the guide vanes cannot be closed. At the runaway condition, the runner is subjected to a very high amplitude unsteady pressure loading and significant vibrations that cause the blades to fatigue [
4,
5,
6,
7,
8].
Studies [
2,
6,
7,
9,
10] on hydraulic turbines during total load rejection have shown that the runner was subjected to an unsteady pressure loading with an amplitude that was more than twice that at the normal operating condition,
i.e., the best efficiency point (BEP). The amplitudes and frequency of the pressure fluctuations are primarily attributed to the rotor stator interaction (RSI), which increases with the runner angular speed. This speed rise condition may be observed for a few seconds because the guide vanes close rapidly after total load rejection [
2]. However, the closing rate depends on the operating point, the inertia of the rotating masses and the time available to prevent water hammer. The closing rate of the guide vanes significantly affects the transient pressure loading in the runner.
At the runaway condition, unsteady swirling flow develops for which the discharge is extremely low, and the runner rotates at high speed. This flow results in high-amplitude unsteady pressure fluctuations on the blade surfaces. Unsteady pressure measurements on a Francis turbine [
11,
12,
13,
14,
15,
16] have shown that a small opening of the guide vanes and high angular speed of the runner induced largely separated flow at the runner inlet. The pressure difference between the pressure and suction sides of the blades increases, which results in an increase of the runner speed. Experimental and numerical studies on pump-turbines at the runaway condition showed that the flow instabilities at the runner inlet resulted in unstable flow, e.g., the continuous formation and destruction of large eddies [
17].
The literature [
4] on current operating trends for the hydraulic turbine shows that the total load rejection and the runaway condition cause significant damage to the turbine runners. Damage due to cyclic fatigue is equivalent to the several hours of runner operation at BEP [
18,
19,
20]. The rotor deformation is also one of the main concerns, as there is a danger of touching in the labyrinth seals and generator gaps. However, this work focuses on the flow field; the mechanical consequences are not addressed in this paper.
In the present study, we primarily focus on experimental and numerical studies of the flow field and its effects on the runner blades at the runaway condition. Three operating points of a model Francis turbine were selected. The time-dependent pressure measurements were carried out using pressure sensors located at the vaneless space, the runner and the draft tube. The experimental results were used to validate the numerical model, which were then used to analyze the flow further.
2. Test Rig and Instrumentation
A scaled model of a high head Francis turbine (
DP = 1.78 m,
HP = 377 m,
QP = 31 m
3·s
−1,
NQE = 0.27) was used in the experimental studies. The turbine included 14 stay vanes that were integrated into the spiral casing, 28 guide vanes, a runner with 15 blades and 15 splitters and an elbow-type draft tube. The reference diameter (
DM) was 0.349 m. The total, random and systematic, uncertainty in the hydraulic efficiency was ±0.16% at the BEP, based on calibration of the instruments before the measurements. The calibration and uncertainty computation were performed using the procedure available in IEC 60193 [
21].
The test rig was operated with an open-loop hydraulic system to obtain a condition similar to the prototype without a significant variation of the available head during the measurement. Water from the large basement was continuously pumped to the overhead tank and flowed down to the turbine. The pump was operating at constant speed, and the water above a certain height (HM ≈ 12 m at BEP) in the overhead tank flowed down to the basement. The measured pressure head at the turbine inlet was 220 kPa absolute at the BEP. The draft tube outlet was connected to the downstream tank, where a constant water level was maintained (equal to the level of the runner outlet), and water above this level was discharged to the basement. The tank was open at atmospheric pressure, and the draft tube was submerged under the constant water level. The laboratory area of the basement is large compared to the discharge in the model turbine; therefore, there was negligible variation in the water temperature, and the maximum water temperature was 15.6 °C. A minimum pressure of 80 kPa was recorded at the blade trailing edge, which is much higher than the vapor pressure of the water. Therefore, the measurement condition was believed to be cavitation free.
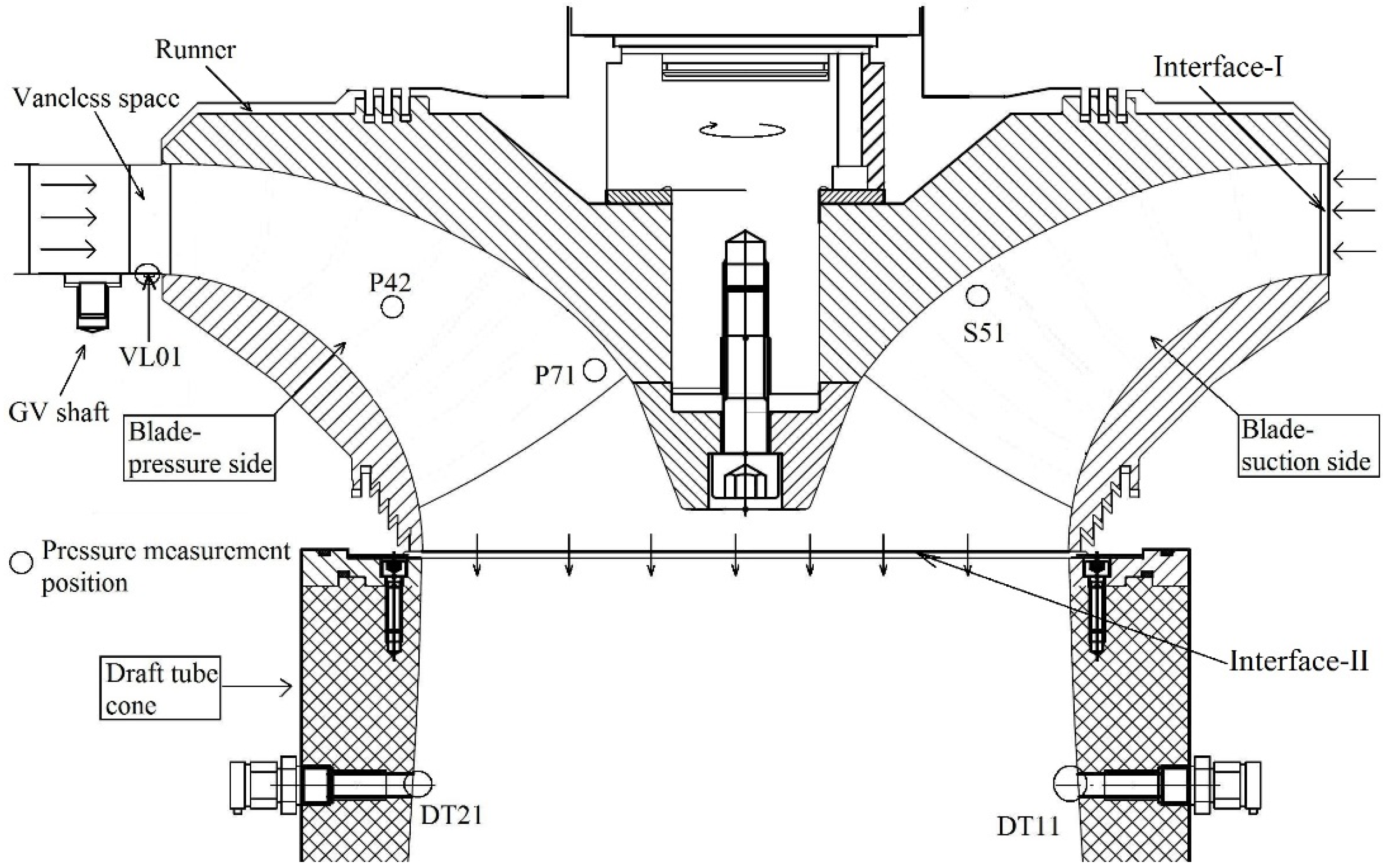
A total of eight pressure sensors were used for unsteady pressure measurement. Two pressure transmitters, PTX1 and PTX2, were located at the turbine inlet pipe. PTX1 and PTX2 were flush with the pipe surface and located at 4.87 and 0.87 m, respectively, from the inlet of the spiral casing. The other six sensors were located in the turbine (see
Figure 1). A sensor (vaneless space (VL01)) was integrated on the surface of the bottom ring in the vaneless space, a gap between the guide vanes row and the runner, to capture the effect of rotor stator interaction. Three miniature-type sensors, P42 (blade pressure side), P71 and S51 (blade suction side), were integrated on the runner blade surfaces at the pressure side, the trailing edge and the suction side, respectively. Data from the runner sensors were acquired using a wireless telemetry system, Summation Research SRI-500e. The remaining two sensors, DT11 (draft tube cone) and DT21, were mounted to the wall of the draft tube cone. Both sensors were located 180° radially apart from each other at the same axial position (
h* = 1.7). The dimensionless axial and radial positions of the sensors are listed in
Table 1. The axial position (
h) was measured from the midpoint of the breadth of the runner inlet, and the radial position (
r) was measured from the runner rotation axis. The reference radial distance (
RM) was the radius measured at the runner outlet,
i.e.,
DM/2. The reference axial distance (
href) was considered as the runner depth,
i.e., the midpoint of the breadth of the runner inlet to the runner outlet.
The measurements were divided into two parts: (i) evaluation of the performance characteristics, and (ii) evaluation of the runaway characteristics. A constant efficiency hill diagram was constructed to evaluate the turbine performance under normal operating conditions. A maximum hydraulic efficiency of 93.4% was observed for a guide vane angle (α) of 9.9°, a runner angular speed (
n) of 335.9 rpm, a net head (
H) of 11.9 m and a discharge (
Q) of 0.2 m
3·s
−1. This condition is regarded as BEP in the paper. A detailed analysis of the performance characteristics has been discussed in a previous publication [
4].
Three angular positions of the guide vanes were used for the measurements at the runaway condition: 3.9°, 9.9° and 12.4°. A frequency controller coupled to the generator was used to increase the runner angular speed. The speed was increased until the shaft torque reached zero, while maintaining the same position of the guide vanes,
i.e., 3.9°. A similar procedure was followed for the other two angular positions of the guide vanes.
Table 2 summarizes the observed parameters at the runaway and BEP conditions. The runaway speed (
nR) for all of the points was more than 150% of the turbine synchronous speed (
n) at BEP,
i.e., 5.53 Hz. The runaway speeds for the angular positions of the guide vanes at 3.9°, 9.9° and 12.4° were 8.12, 8.74 and 8.84 Hz, respectively. The discharge (
QR) was lower at the runaway conditions than at the BEP, as expected. At the constant angular position of 9.9°, the discharge values at the runaway and BEP conditions were 0.08 and 0.2 m
3·s
−1, respectively. The shaft torque (
T),
i.e., the torque to the generator, was almost zero at all of the runaway points. The shaft torque at the BEP was 621 N m,
i.e., 75% of the maximum load. The Reynolds numbers were 2.8 × 10
6 to 3.02 × 10
6 during the runaway conditions.
5. Spectral Analysis
A power spectral density (PSD) analysis of the pressure-time signals was performed for all of the points at the runaway conditions.
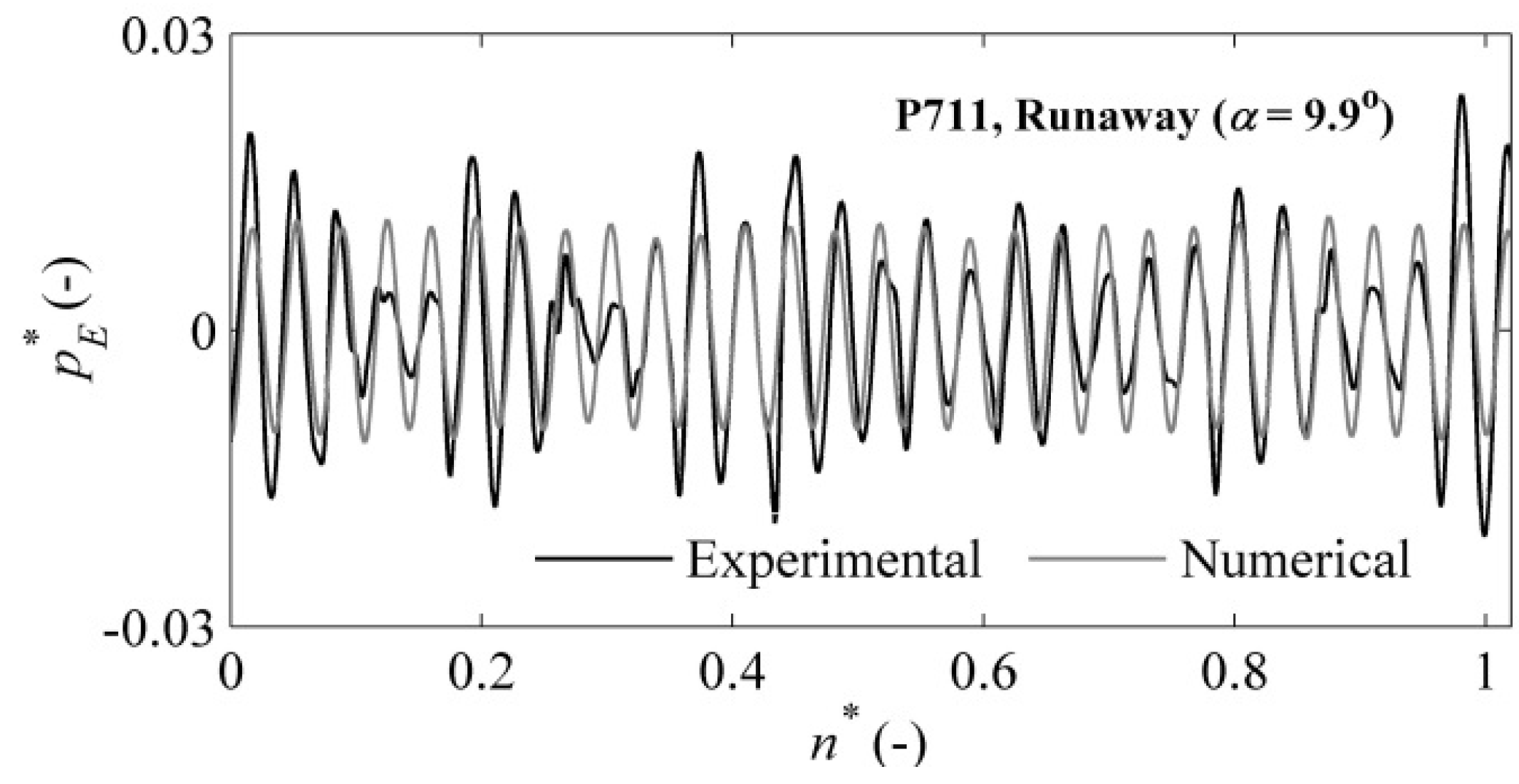
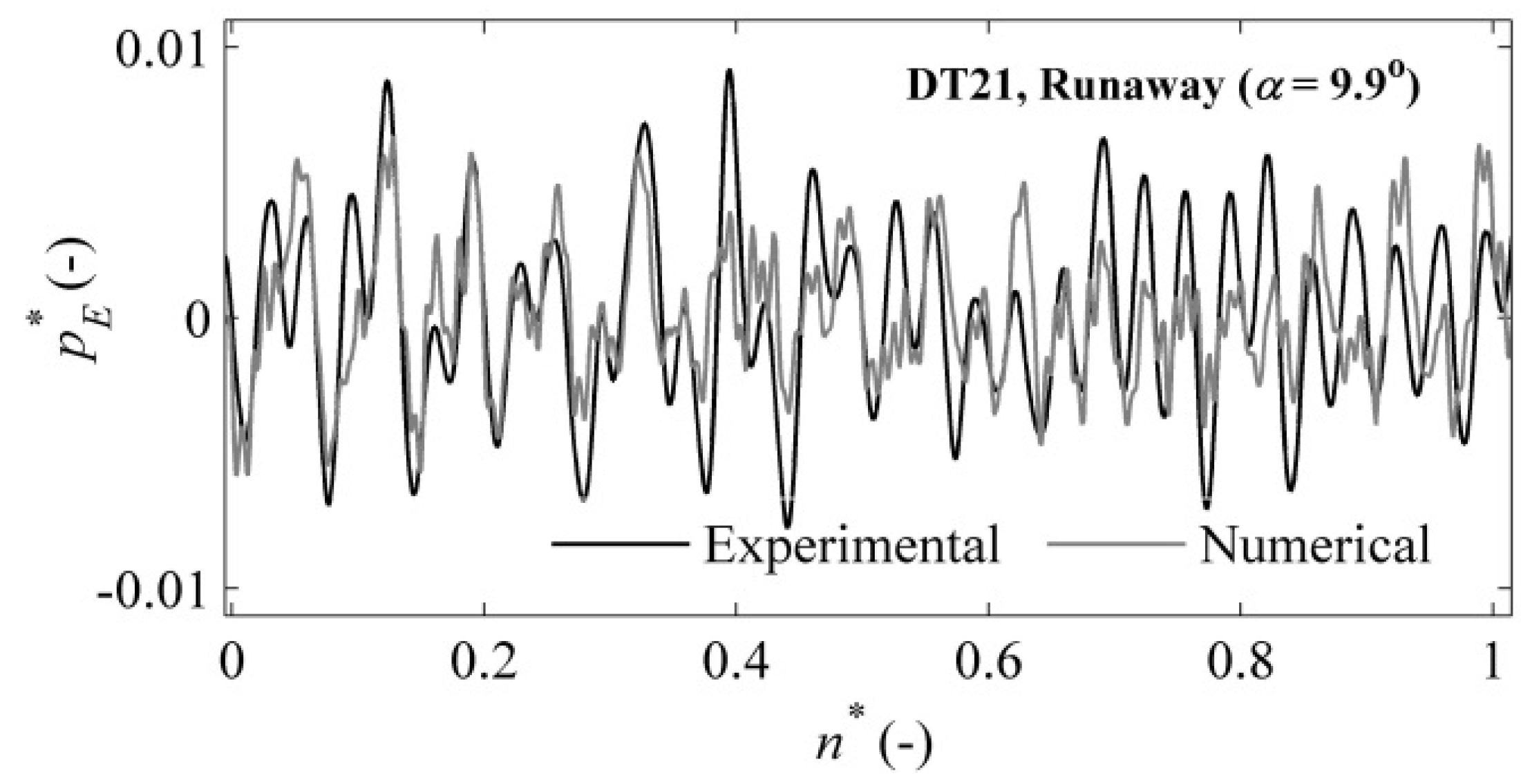
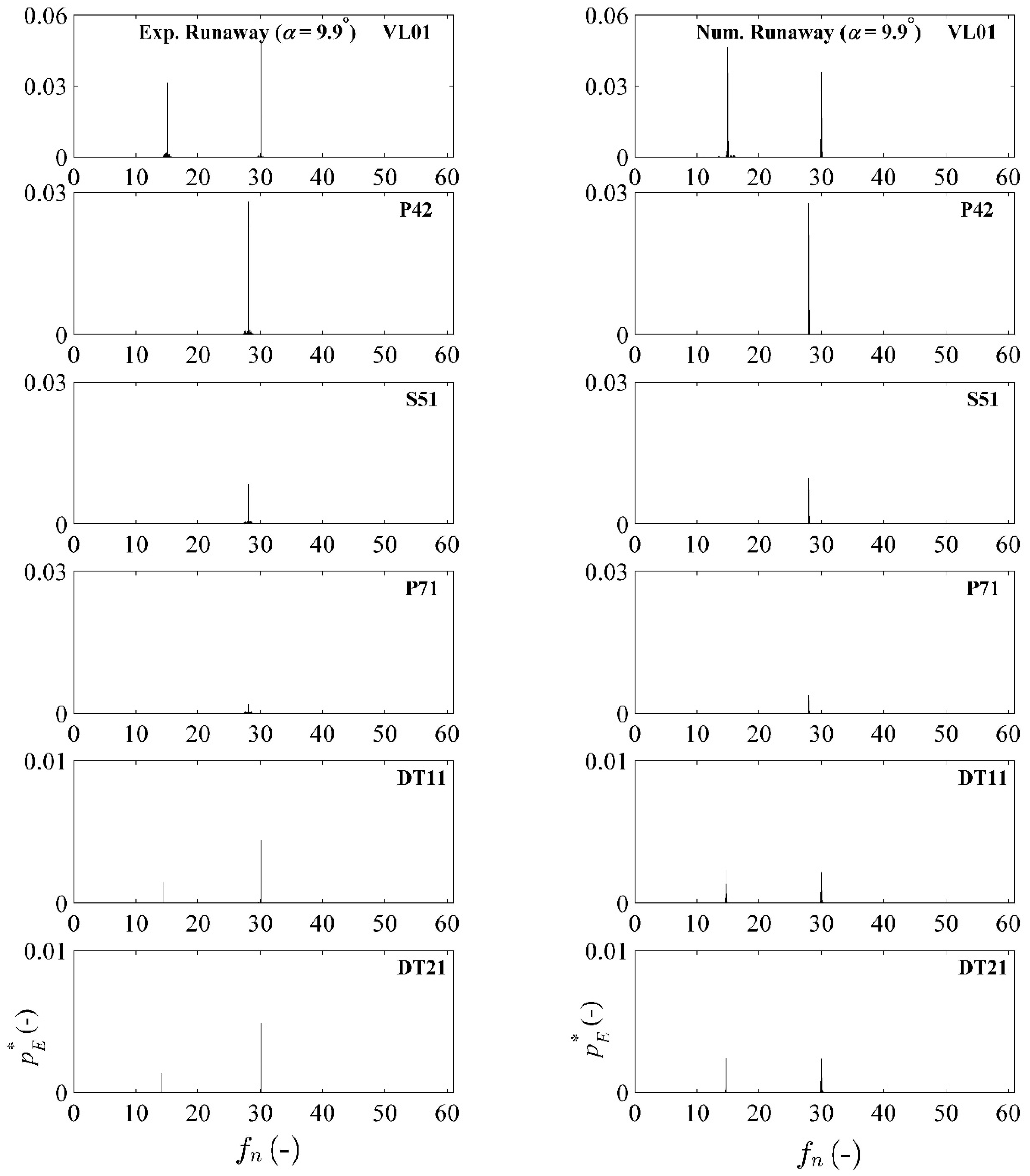
Figure 13 shows the PSD analysis of the pressure-time signals that were obtained for the runaway operating condition at an angular position of the guide vanes of 9.9°. The experimental and numerical frequency spectra at the pressure measurement at locations VL01, P42, S51, P71, DT11 and DT21 are compared in the figure. The pressure-time data of the measurement were processed through a designed filter in MATLAB to enhance the visualization of the investigated frequencies and the corresponding amplitudes. The frequencies that were not related to the flow were filtered out,
i.e., noise, vibrations and frequencies of the electrical power (50 and 100 Hz). The MATLAB designed “bandpass” and “band stop” filter were used to filter out the frequencies [
28].
The turbine consisted of 28 guide vanes and 30 blades, including 15 splitters. The obtained frequencies were normalized by the angular speed of the runner (nR = 8.74 Hz). Therefore, a dimensionless frequency (fn) of 15 with its harmonics was used to represent the blade passing frequency in the stationary domains, and a dimensionless frequency of 28 with its harmonics was used to represent the guide vanes’ passing frequency in the rotating domain. The amplitudes of these frequencies were normalized using Equation (5). Thus, the dimensionless frequency and amplitude are discussed in this section.
In the vaneless space (VL01), two frequencies of 15 and 30 were observed with high amplitude pressure fluctuations. The frequency of 15 corresponded to the sub-harmonic of the blade passing frequency. The blade passing frequency had a maximum amplitude of 0.05. These two frequencies were also obtained by analyzing the numerical pressure-time data at VL01. However, the frequencies had different amplitudes. The amplitude for the blade passing frequency was approximately 29% lower than the experimental value.
A spectral analysis of the numerical and experiment pressure-time signals acquired from the runner blade sensors at P42, S52 and P71 yielded a guide vane passing frequency of 28 at the maximum amplitude. At P42, the numerical amplitude of the guide vane passing frequency was 3% higher than the corresponding experimental value (0.024). For S51 and P71, the numerical amplitudes were 2 and 5% higher, respectively, than the experimental values. No other frequency with such a high amplitude was observed in the runner. However, the amplitude of the guide vane passing frequency at the runaway condition was more than two-times the amplitude at the BEP.
At DT11 and DT21 in the draft tube, a high-amplitude (0.002) blade passing frequency (fn = 15) was observed numerically. The amplitude of the numerical pressure-time data was approximately 12% higher than the corresponding experimental value. Another dimensionless frequency of 30, the first harmonic, was observed for both numerical and experimental data. No other frequency related to the vortex rope or axial pressure pulsations was observed in the spectral analysis of the data from DT11 and DT21. A vortex rope may not have developed under these conditions because the discharge to the runner was extremely low, and the runner was rotating at the runaway speed, which was more than 150% of the synchronous speed.
6. Unsteady Flow in the Runner
A small difference between the experimental and numerical results provided us with the confidence for further investigation into the complex flow passage of the runner. The turbine runner includes 15 splitters and 15 blades. The blades are highly twisted, which make a turn of 178° from the leading edge to the trailing edge. The length of the splitter is half of the blade. The analysis of the flow field in the runner showed that there was a swirling flow in the blade passages at the runaway operating conditions.
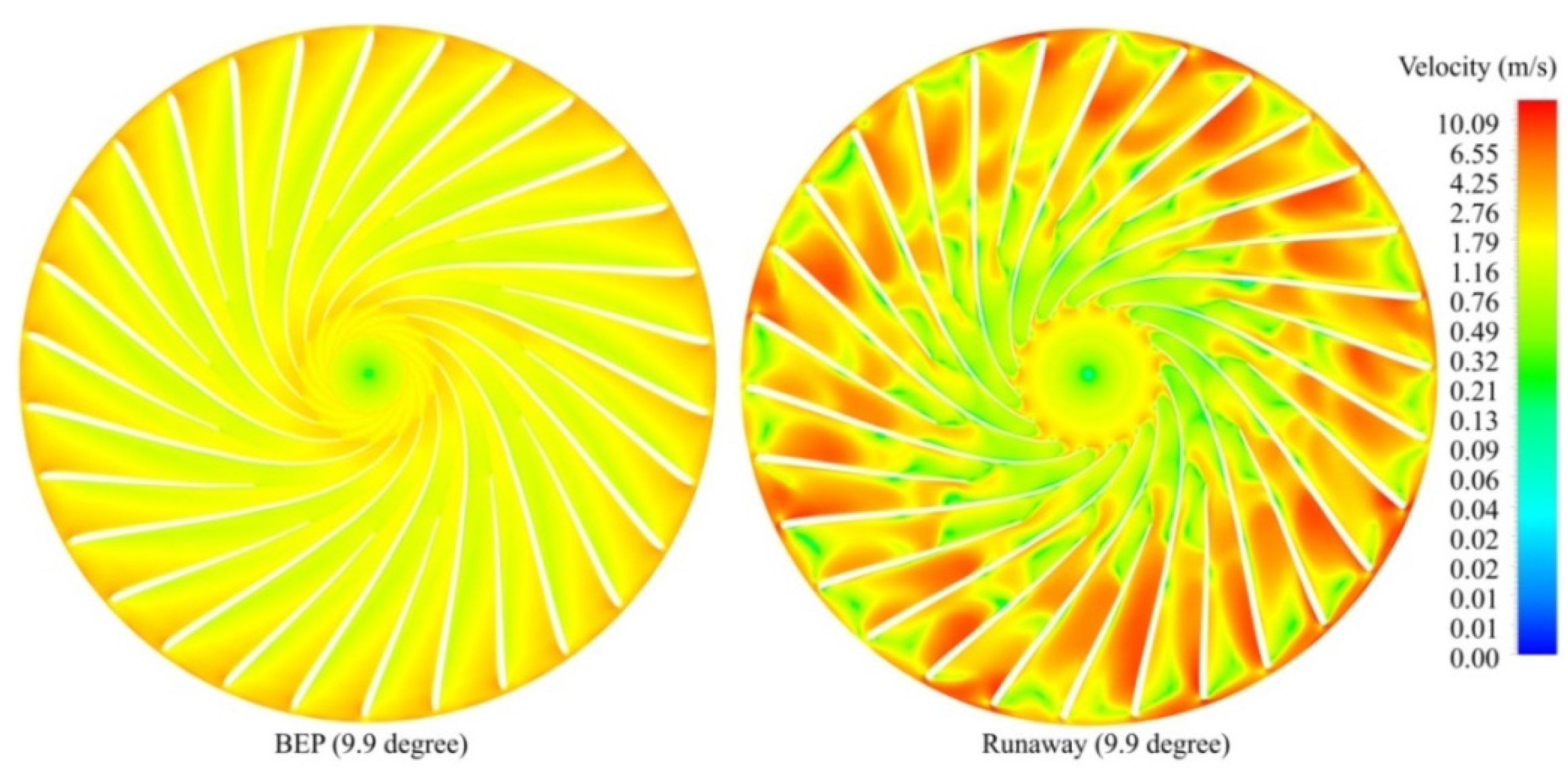
Figure 14 shows the velocity distribution contours near the surface of the runner crown at the BEP and the runaway condition at a guide vane angular position of 9.9°. A new plane was created 5 mm below the crown to extract the velocity distribution near the crown. The flow field is shown in the rotating frame of reference. The velocity contours are shown at the instant after 10 revolutions of the runner,
i.e.,
t = 1.81 and 1.14 s, for the BEP and the runaway condition, respectively. The same mesh was used for the simulation at both operating conditions. At the BEP, a uniform velocity distribution was obtained for the blade passages, and the flow was almost streamlined, whereas a non-uniform flow field was observed at the runaway condition. The flow field in the blade passages evolved with time and the angular movement of the runner.
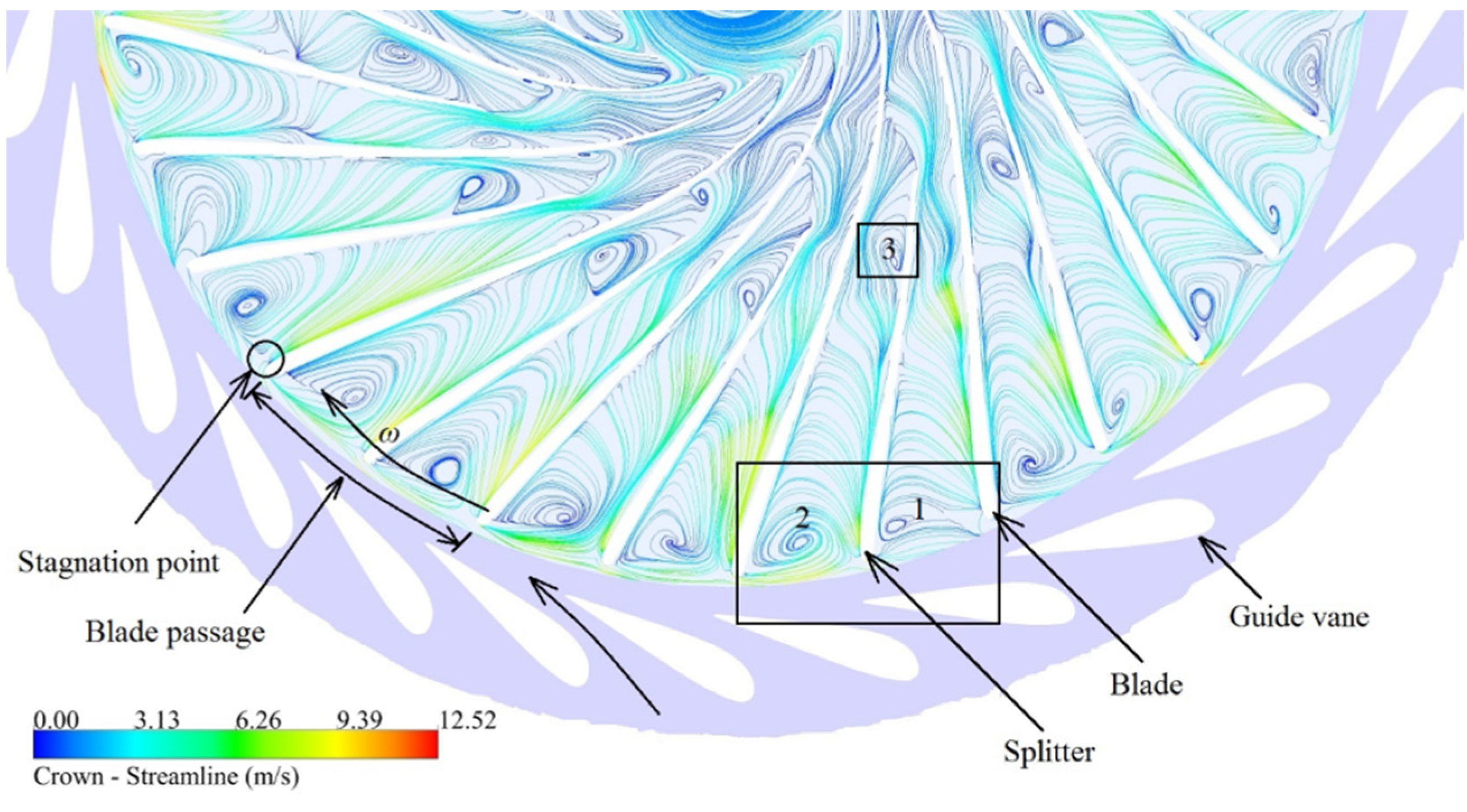
In the following, a blade passage starts from the pressure side of a blade and ends at the suction side of the opposite blade. Each passage makes an angle of 24° (=360°/15 passages), from the pressure side of a blade to the suction side of a splitter (i.e., 12°) and the pressure side of the splitter to the suction side of the opposite blade (i.e., 12°). During the runaway operating condition (α = 9.9°), a high relative velocity (~10 m·s−1) was obtained near the blade suction side from the runner upstream to the downstream. In the runner, the area of the blade passage decreased from the inlet to the outlet, and the fluid velocity also appeared to simultaneously decrease along the passage. The large variation in the relative velocity in the passage could have produced an unsteady flow. The flow appeared to accelerate near the suction side and decelerate at the pressure side. The runner rotated under a no load condition at a significantly high speed and a low discharge.
Figure 15 shows the velocity streamlines on the runner crown surface at the same instant (
i.e.,
t = 1.14 s) at the runaway operating condition (α = 9.9°). Three regions with a vortical flow can be observed. Two regions were at the inlet of the blade passage and are marked as “1” and “2”; a third region marked as “3” was located between the splitter suction side and the blade pressure side, near the splitter trailing edge. The rotating direction of the vortical flow in Regions 1 and 2 was opposite the direction of the runner rotation, whereas the direction of the vortical flow in Region 3 was the same as the runner rotation. Similar vortical regions were observed for all of the blade passages of the runner.
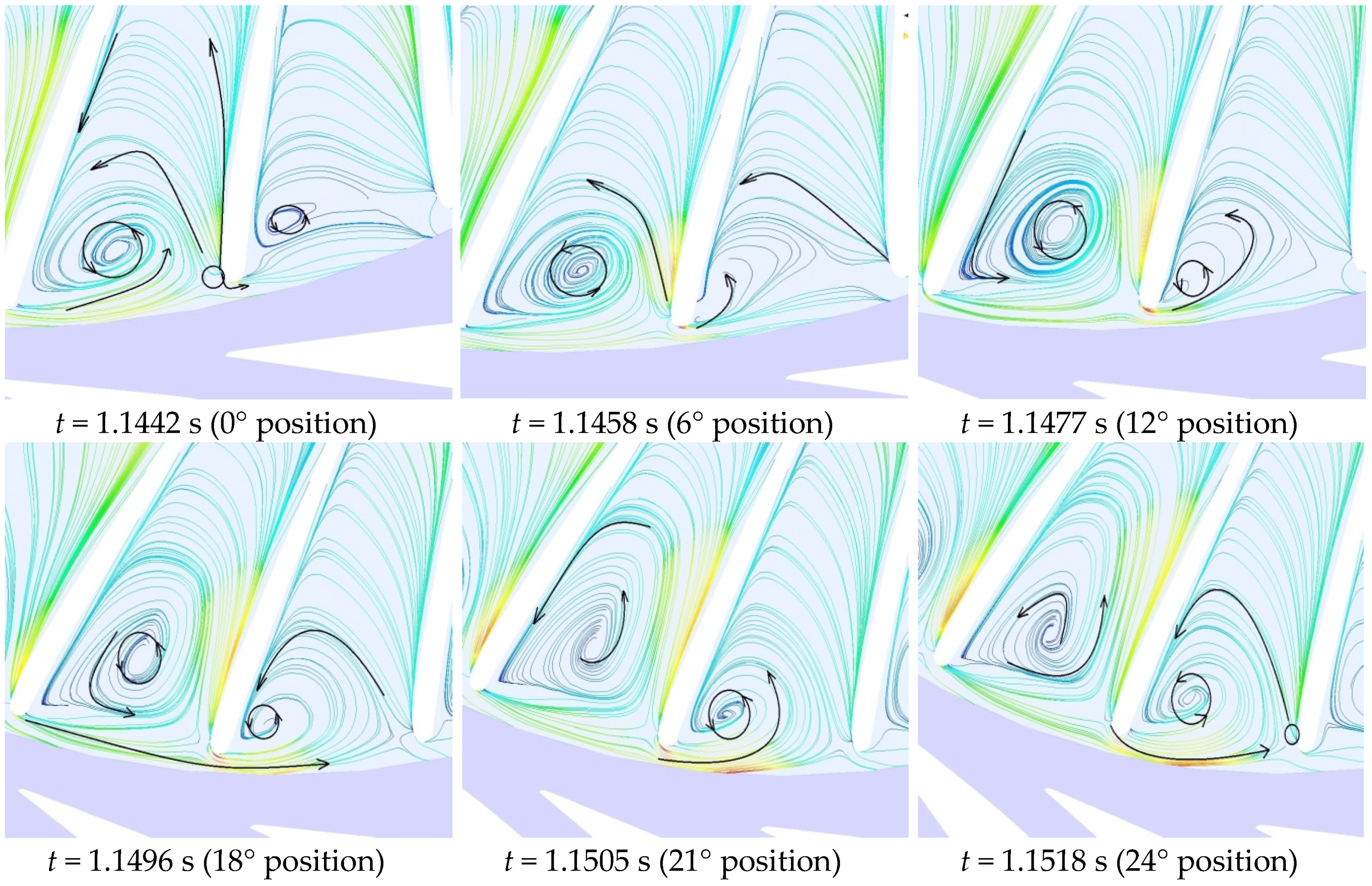
Figure 16 shows the instantaneous variation in the flow field in the rotating frame that is marked by a rectangle in
Figure 16. The velocity streamlines on the runner crown are shown for a total time of 0.0076 s (
i.e., a 24° angular movement of the runner), and the color scale is the same as that shown in
Figure 16. The vortical region may have developed based on the angular position of the blade passage. The vortical region started to form when a blade was positioned in front of a guide vane trailing edge. At an angular position of 0°, Vortical Region 1 began to form, and Vortical Region 2 had already developed because of the previous angular movement. At the splitter leading edge,
i.e., the stagnation point, the flow separated into three directions (see the blade passage at
t = 1.1442 s): (i) a portion of the flow accelerated toward the blade channel; (ii) a portion of the flow traveled toward Vortical Region 2; and (iii) a portion of the flow traveled toward the vaneless space in the direction of the runner rotation. At an angular position of 12°, Region 1 evolved further, and the flow rotated about a local axis in the counter clockwise direction. At an angular position of 24°, Region 1 became larger. Thus, the vortical flow developed with time up to an angular position of 74°. The cycle was observed and repeated for each angular movement of 74° of the runner. A similar phenomenon was observed for Vortical Region 2.
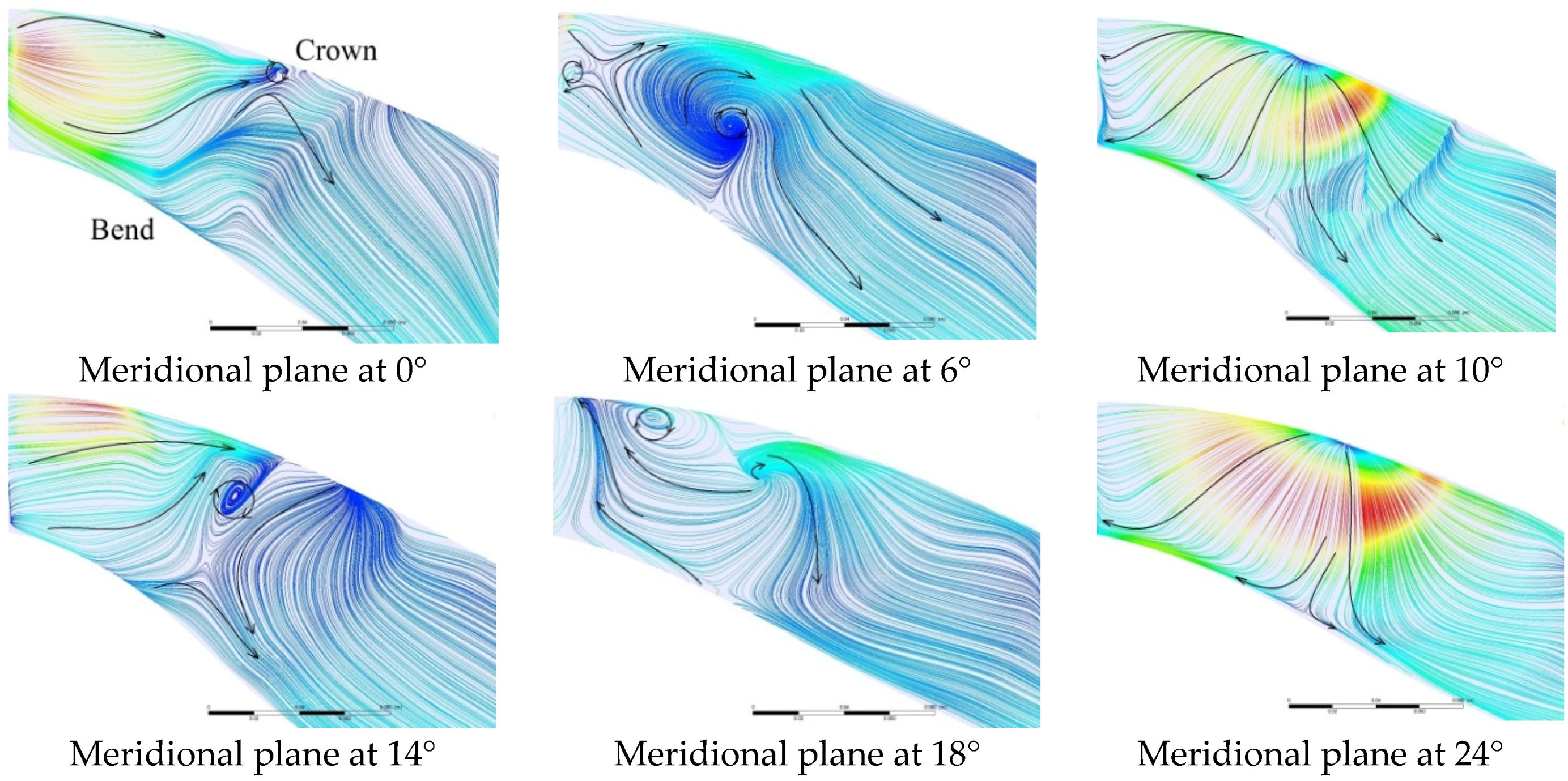
Figure 17 shows the streamlines in a meridional plane for the same blade passage at an instant in time (
t = 1.1442 s). A total of six sections are shown ranging from 0 to 24°. At the meridional plane at 0°,
i.e., the suction side of the blade, the flow generally accelerated downstream, and a small vortical region was observed near the crown. At the meridional plane at 6°,
i.e., the middle of the blade channel, the development of a large vortical region that rotated in the clockwise direction was clearly observed. The flow at the crown side accelerated more than at the band side, which may have created a large pressure difference in the channel, causing the flow to recirculate. The entire vortical flow region was pushed to the down side of the passage by the angular motion of the runner. At the meridional plane at 10°,
i.e., the pressure side of the splitter, the flow accelerated from the crown to the band side. At the meridional plane at 14°,
i.e., the suction side of the splitter, the flow field was almost similar to that observed at the 0° plane. At the meridional plane at 18°,
i.e., the middle of the blade channel, reversed flow was observed. A portion of the flow accelerated to the down side, while another portion of the flow flowed back to the up side, and a swirling region developed near the crown. The swirling flow rotated in a clockwise direction. At the meridional plane of 24°,
i.e., the pressure side of the next blade, the flow was fairly similar to that observed at the 10° plane. In summary, a strong secondary flow was created in the blade channels, producing considerable losses and pressure fluctuations.
Unsteady flow in the blade passage was observed at the runaway operating condition. The flow field may have been primarily driven by the pressure difference that developed in the blade channel along the passage length from the inlet to the outlet. On the pressure side surfaces, the flow generally traveled from the band to the crown and then accelerated to the down side of the channel. On the suction side, the flow accelerated from the crown to the band side and divided into two directions, the up and down sides of the channel. The strongest swirling flow was observed in the middle of the channel and rotated in the clockwise direction. The direction of rotation was driven by the pressure difference between the crown and band, because the flow accelerated more at the crown side than the band side.
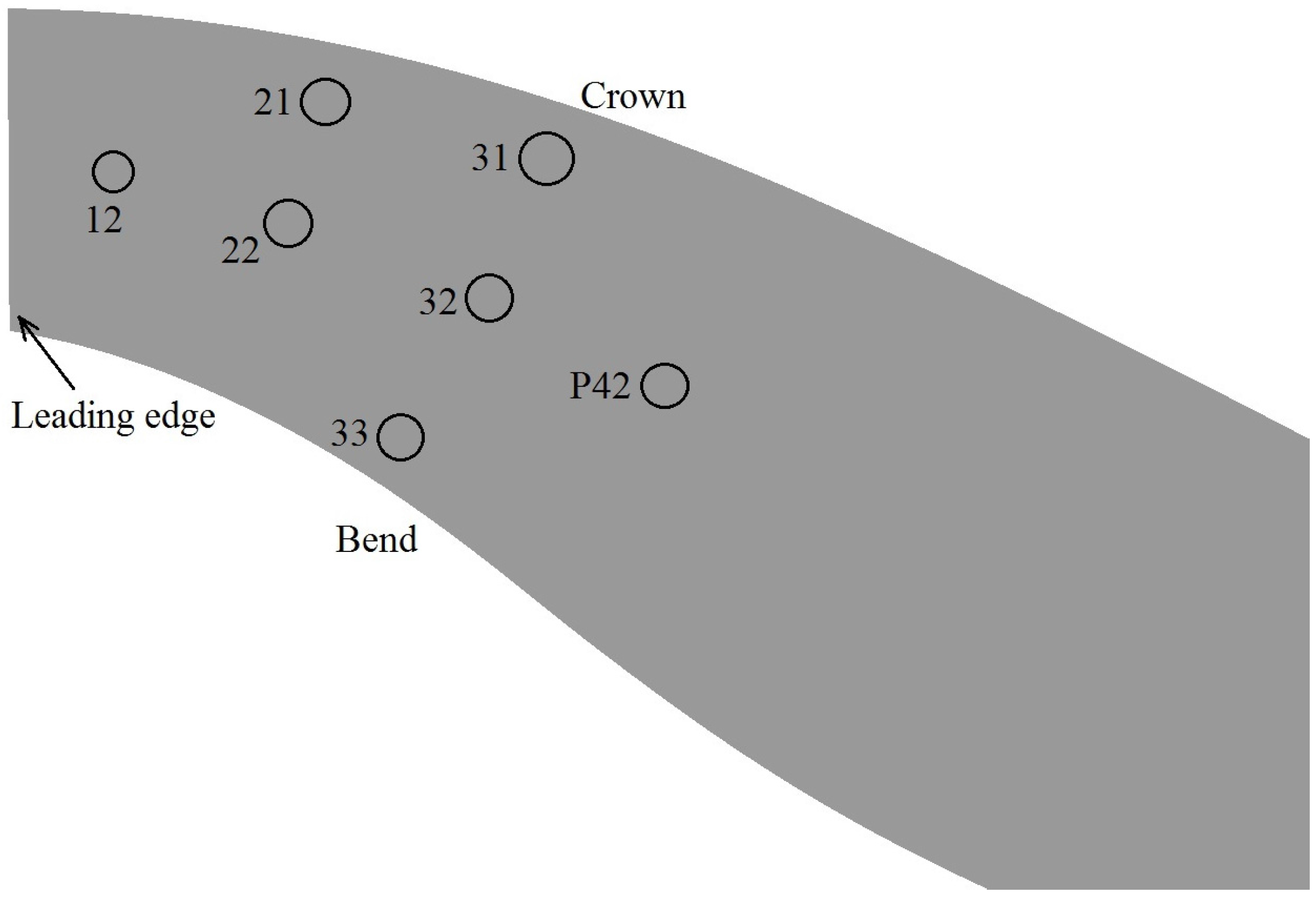
A grid of numerical points was created on the meridional plane at the blade pressure and the suction sides to monitor the pressure variation related to the angular motion of the runner. Some of the grid points are shown in
Figure 18. A PSD analysis was performed on all of the numerical pressure-time signals obtained from the grid points. A dimensionless frequency (
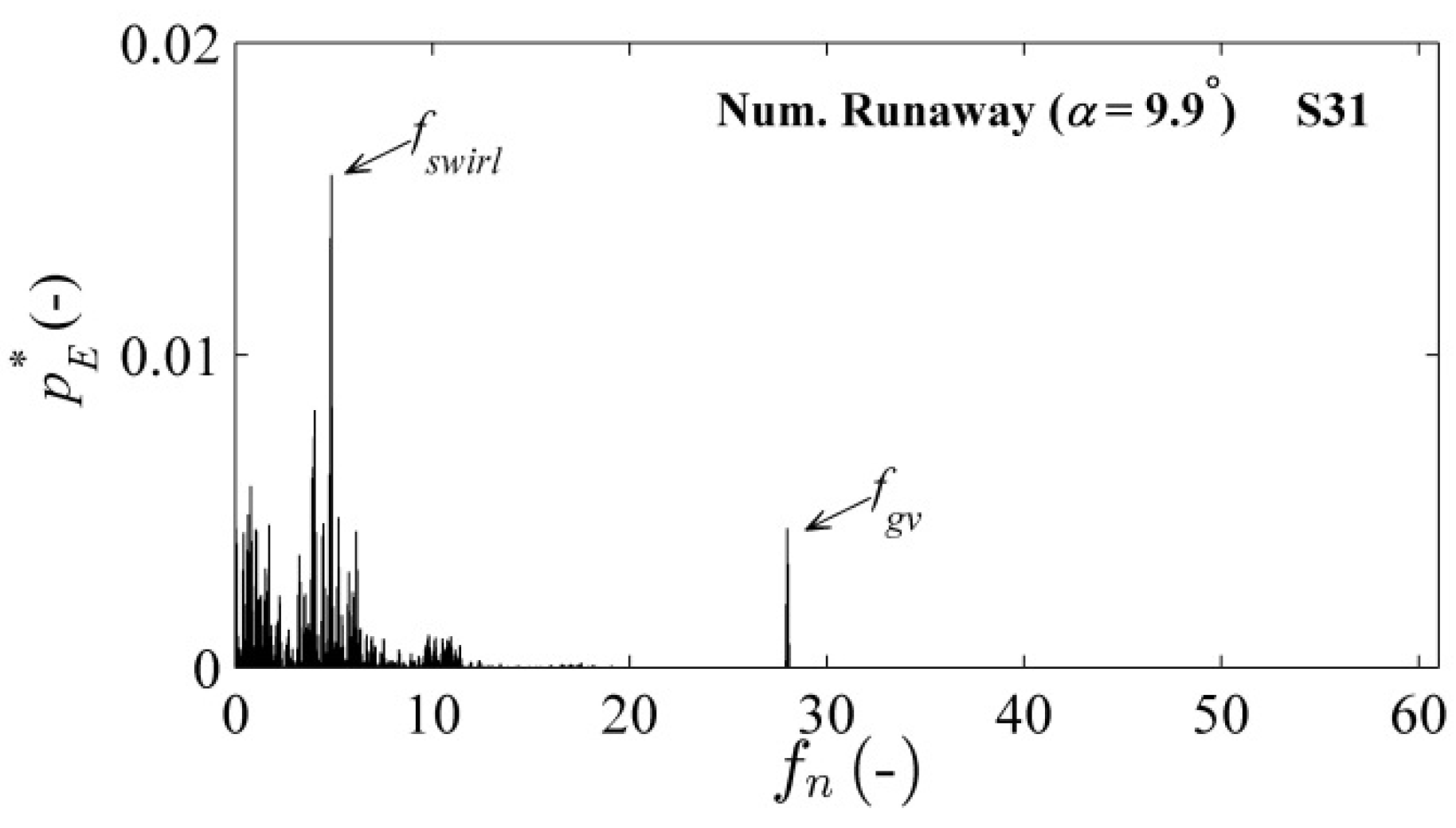
fswirl) of 4.8 (42.24 Hz) was obtained at all of the locations, and the maximum amplitude was observed at two locations, S31 and P32.
Figure 19 shows the spectral analysis of the pressure-time signals at S31. The dimensionless numerical amplitude of the frequency
fswirl was 0.015, which corresponded to an absolute value of 1.8 kPa. The dimensionless frequency of 4.8 corresponded to the angular movement of the runner of 74.5°, which matched the angle of the maximum vorticity, as was discussed for the angular movement of the blade passage.
Figure 17 shows the strong effect of the vortical flow at S31 and P32 at the instantaneous angular positions of 10 and 18°, respectively.
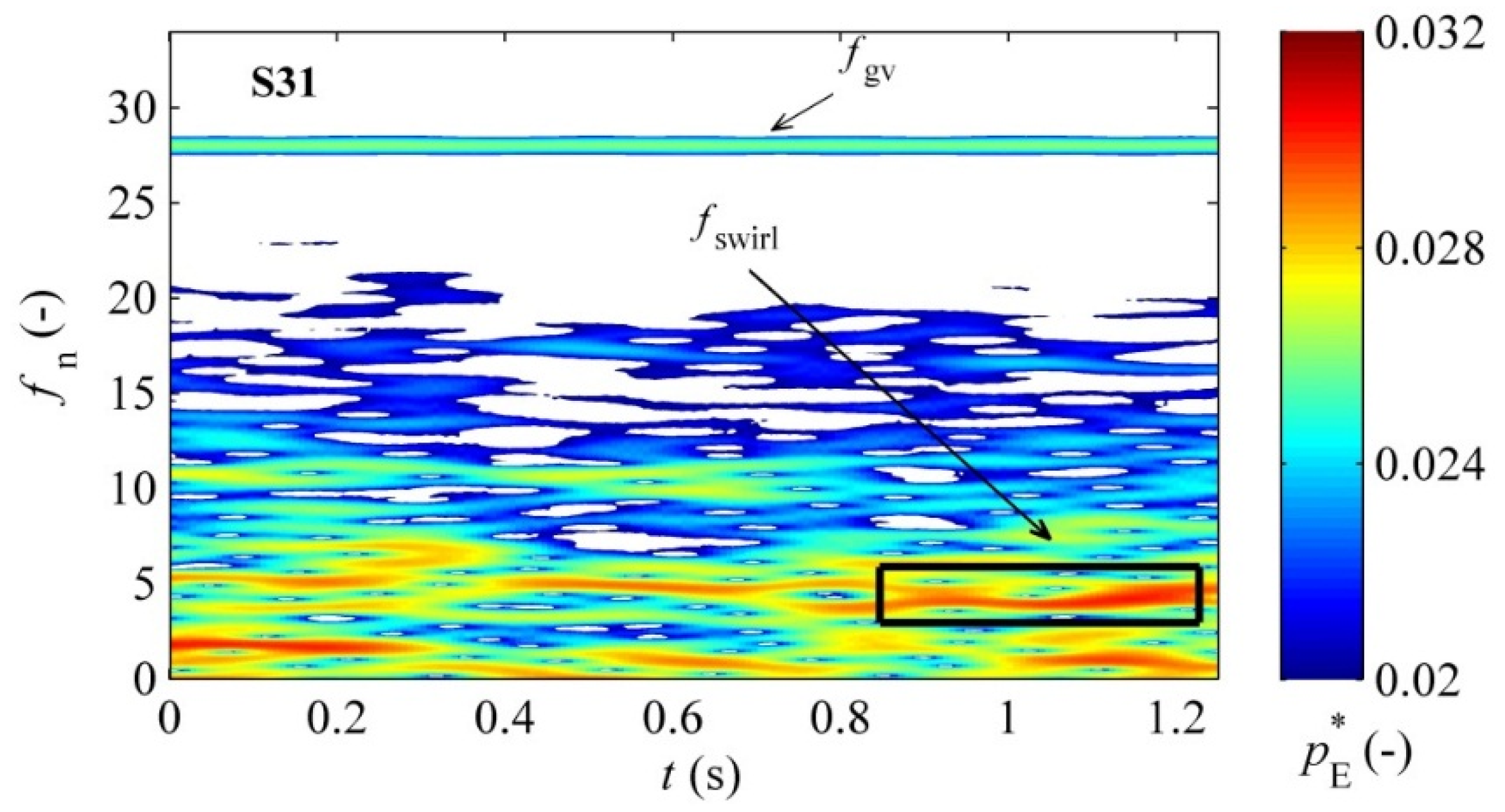
A short-time Fourier transform (STFT) analysis was also performed on all of the points around P32 and S32 to investigate the time-dependent variation of the dimensionless frequency of 4.8. The maximum amplitude of this frequency was observed at S31 (see
Figure 20). The amplitude varied with time/the angular movement of the runner. Surprisingly, this amplitude was higher than that of the guide vane passing frequency (
fgv), indicating the strong effect of the secondary swirling flow in the runner at the runaway operating conditions.
7. Conclusions
A runaway operating condition is one of the most damaging conditions for hydraulic turbines, because the associated pressure fluctuations have extremely high amplitudes, and the runner operates at a very high speed. The unsteady pressure loading in the turbine during the runaway operating condition more than doubles relative to normal operating conditions. Consequently, the runner vibrations are high because the runner rotates at a high speed with no load. The unsteady pressure loading at different locations of the turbine was investigated numerically and validated. Three operating points of the runaway condition over the turbine operating range were investigated.
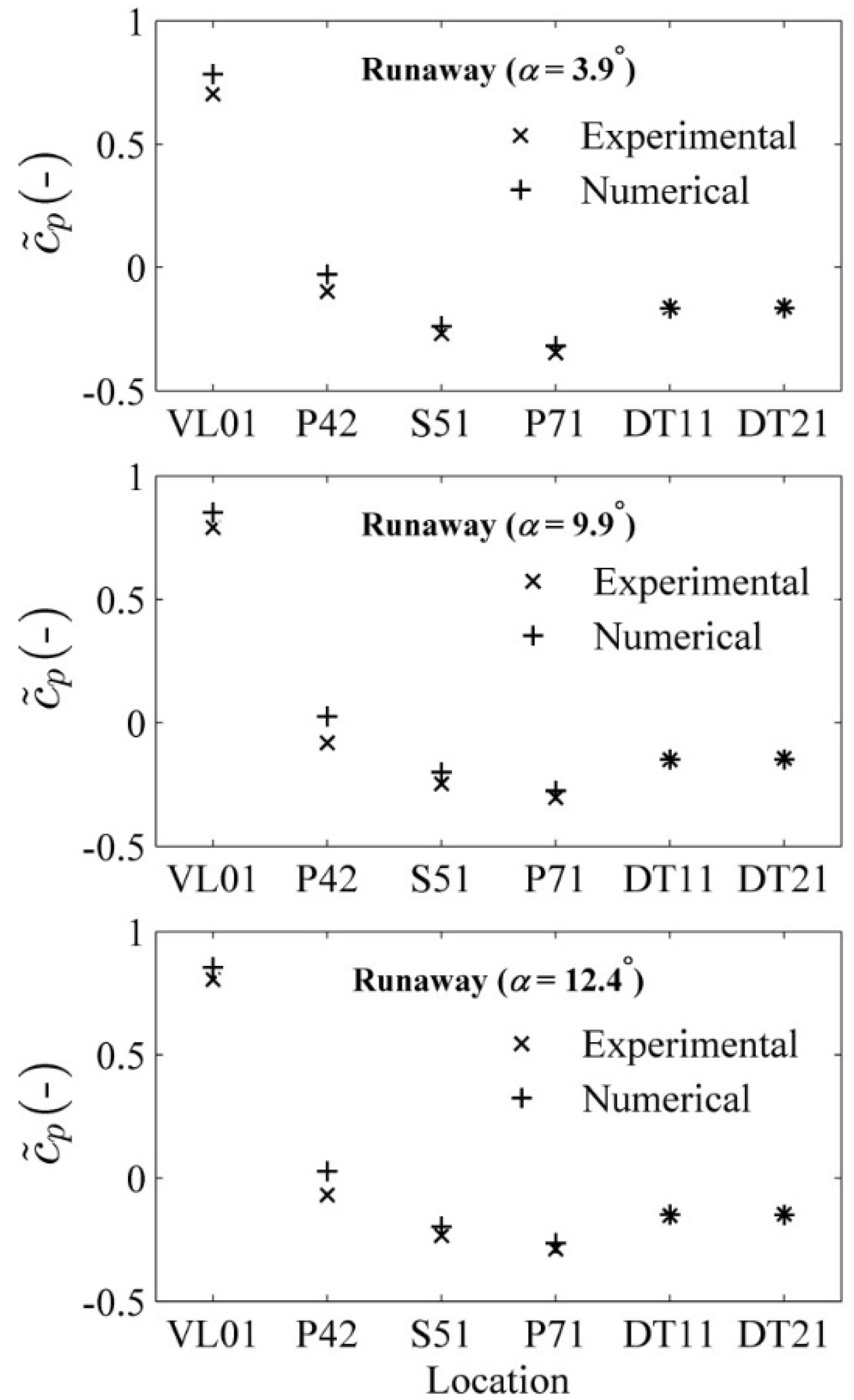
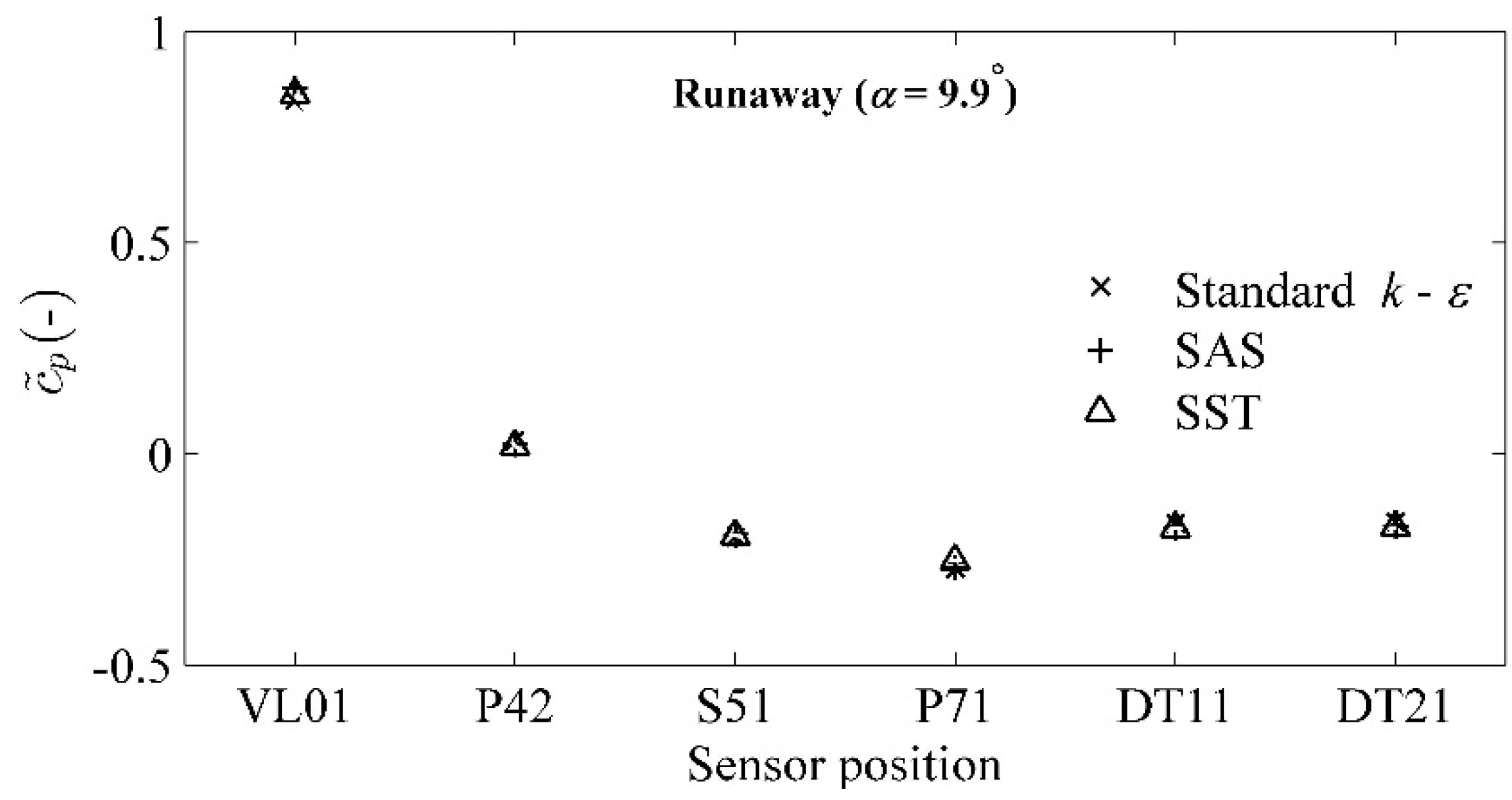
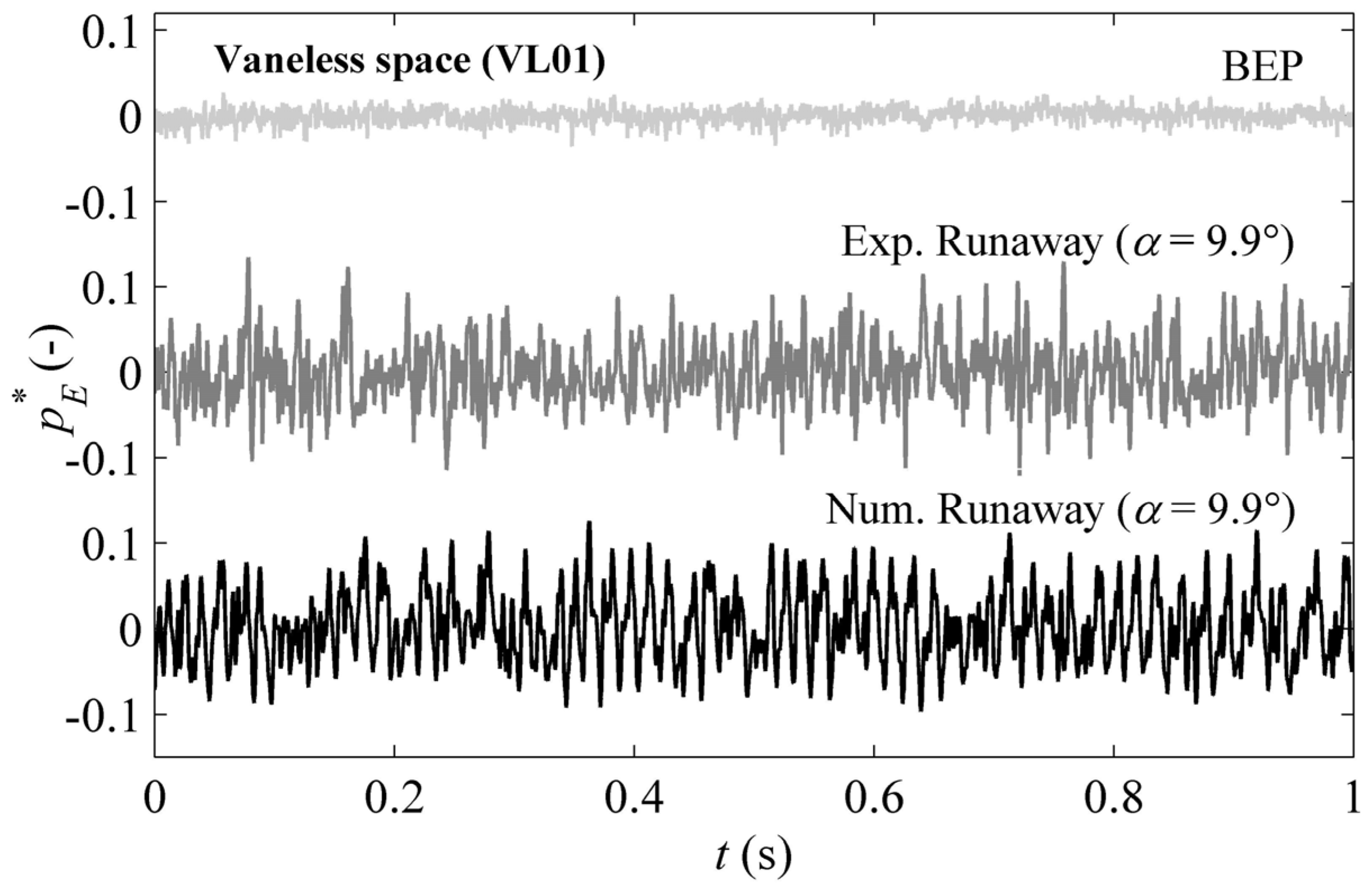
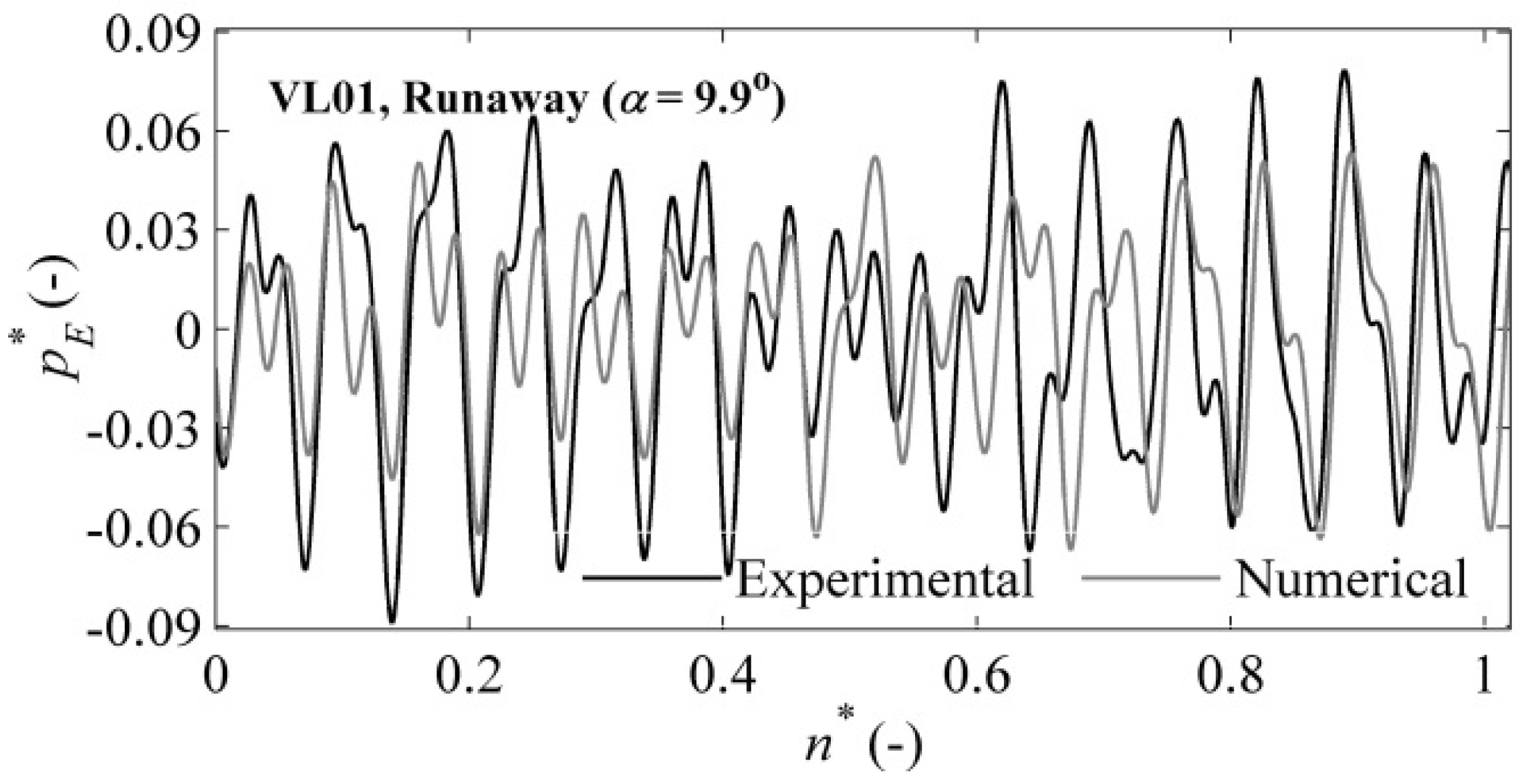
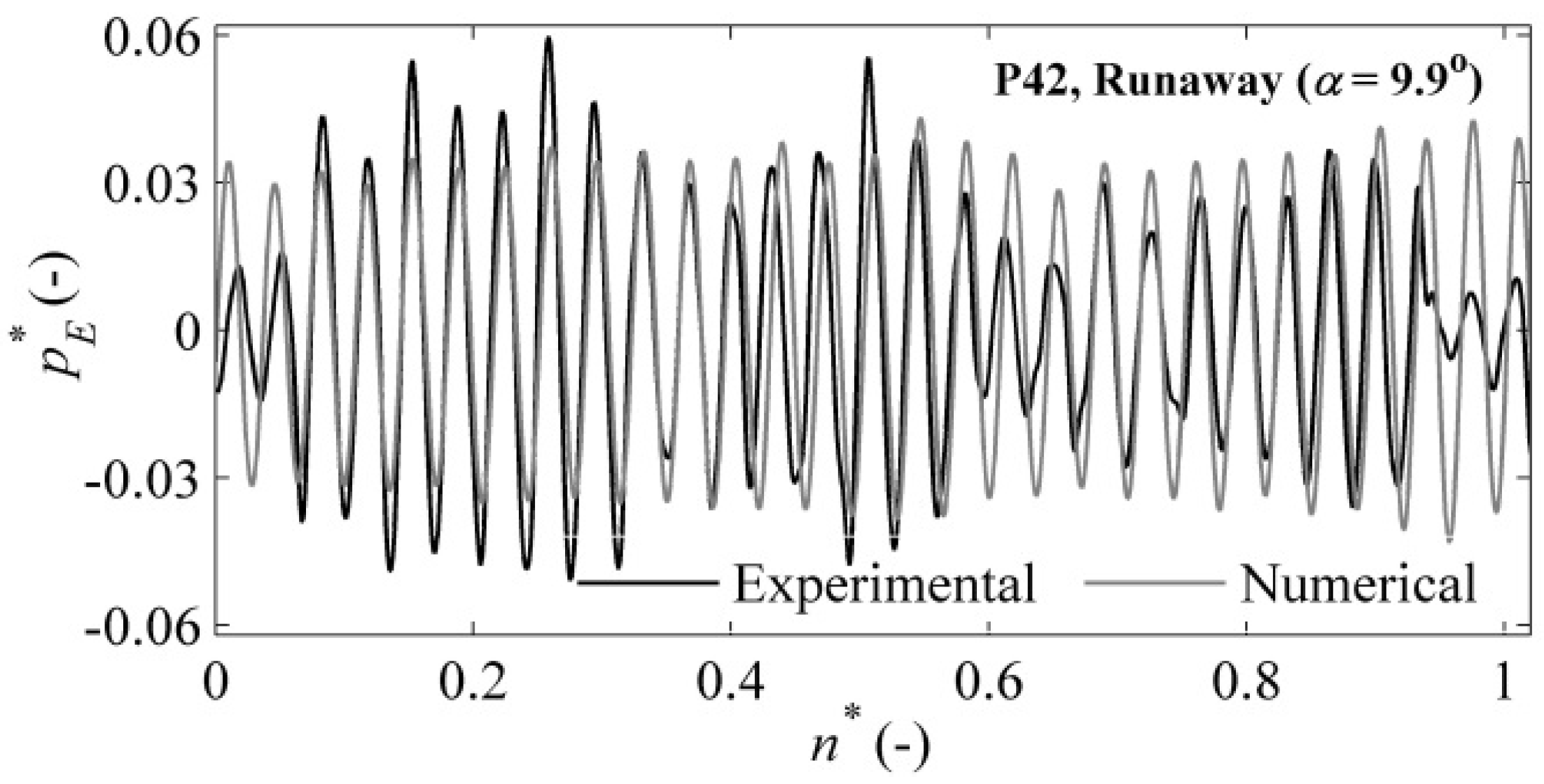
Similar differences between the experimental and numerical dimensionless pressure coefficients were obtained at the investigated points of the runaway condition. A maximum difference of 12.8% between the experimental and numerical results was observed in the runner. This result could be attributed to the under-prediction of the losses from flow separation in the runner. The deviation may be attributed to the variation in capturing the flow unsteadiness (a rotating stall-type condition) due to the large grid size at some locations of the turbine. However, the difference between the experimental and numerical values was within the band of numerical uncertainties that was estimated in the mesh performance analysis. In the draft tube, a moderate pressure difference of 2.1% was observed. Moderate differences between the time-averaged experimental and numerical pressure values were found for the vaneless space and the runner. A PSD analysis of the time-averaged pressure signal for the vaneless space yielded an extremely high amplitude at the runaway condition, which was 2.8-times the amplitude observed at the BEP.
Three turbulence models, standard k-ε, SST k-ω and SAS-SST, were used for the numerical simulations at the runaway condition. The SAS-SST model was used for detailed analysis in the turbine as this hybrid model has the advantage of capturing unsteady flow features over standard k-ε and SST k-ω models. A detailed analysis of the flow field in the runner showed a generally unstable and unsteady vortical flow in the blade passages during the runaway operating condition. The vortical flow was observed at three locations for each blade passage. At two of the locations, the flow rotated in a counter clockwise direction, and at one location, the flow rotated in the same direction as the runner, i.e., clockwise. The frequency of the vortical flow was 4.8·nR, which corresponded to an angular movement of the runner of 74.5° at the runaway speed (nR = 8.74 s−1). A PSD analysis of the numerical pressure signal at these locations yielded similar frequencies, indicating the presence of swirling flow with an absolute amplitude of 1.8 kPa. The amplitude was more than twice that of the guide vanes’ passing frequency in the swirling flow regions. Thus, the unsteady flow that resulted from the rotating swirl at a frequency of 4.8·nR was observed at the runaway operating conditions where the pressure and velocity distribution was non-uniform, as was observed under normal operating conditions. This behavior may have been one of the causes of the high-amplitude unsteady pressure loading. The unsteady pressure loading induce fatigue to the blades, which affects the operating life of the turbine runner, specifically when the transition from total load rejection to the runaway condition takes place.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}