
State-of-Charge Estimation for Li-Ion Power Batteries Based on a Tuning Free Observer

Abstract
:1. Introduction
2. Lazy Extended Kalman Filter
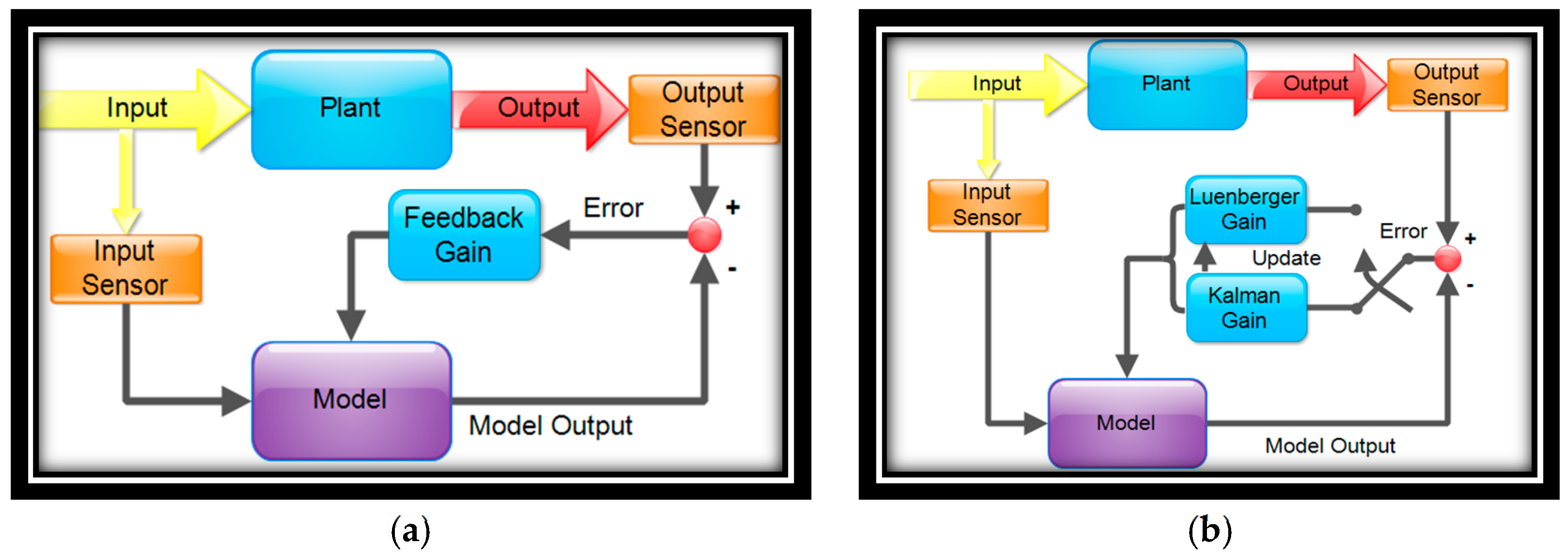
2.1. Luenberger Observer
2.2. Extended Kalman Filter
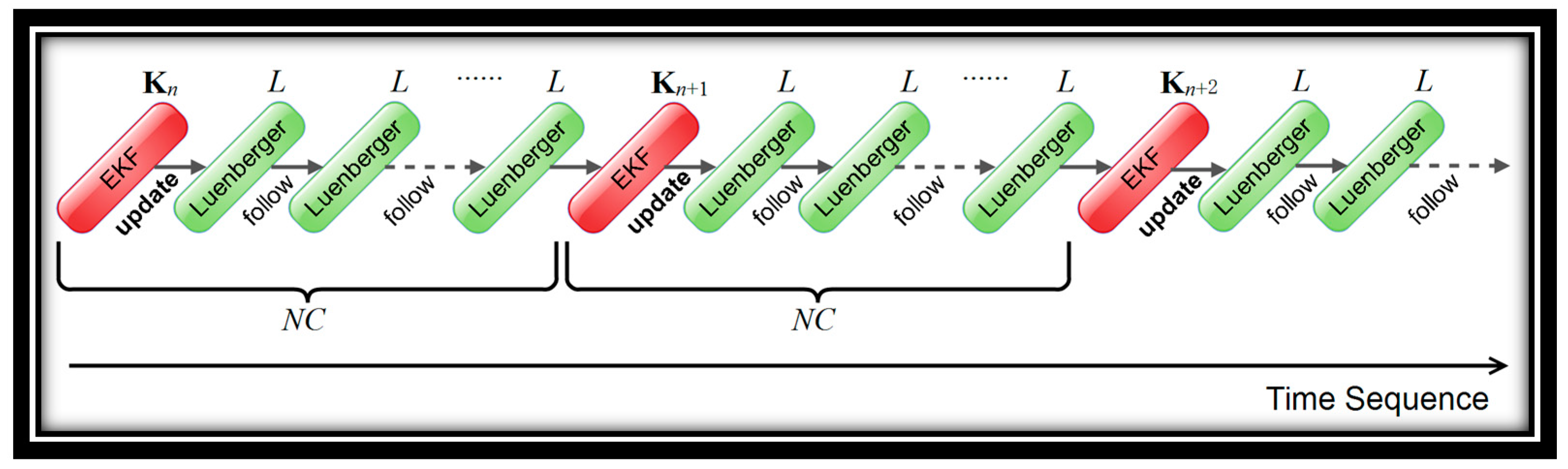
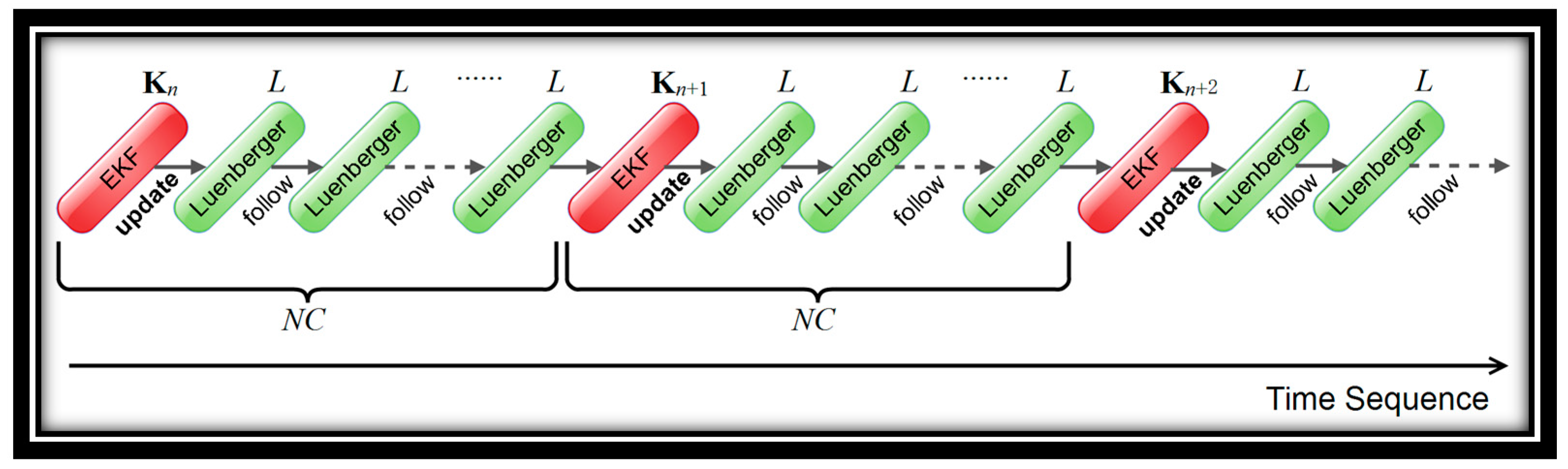
2.3. Lazy Extended Kalman Filter
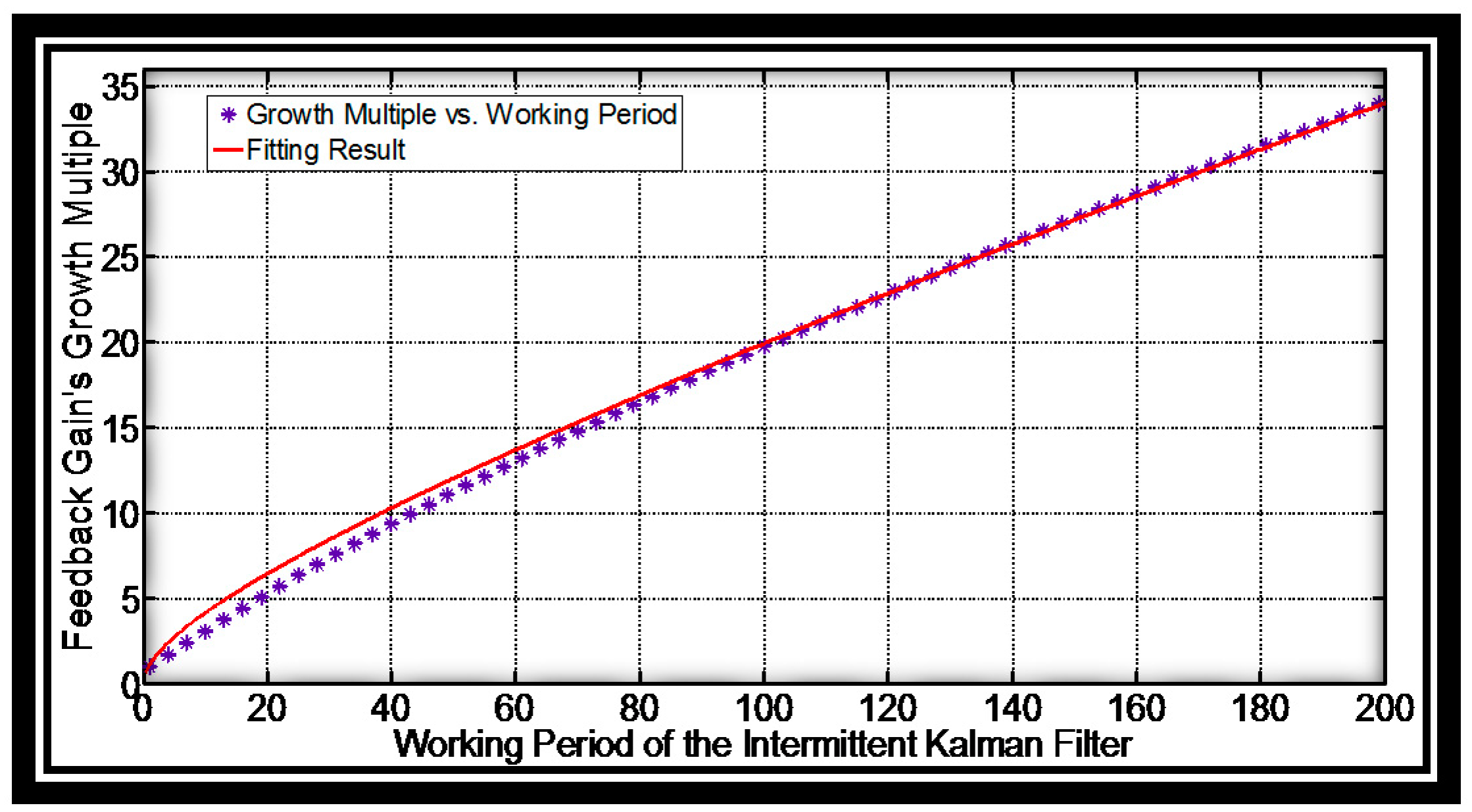
3. Derivation of the Lazy-Extended Kalman Filter
4. Experimental Design and Verification
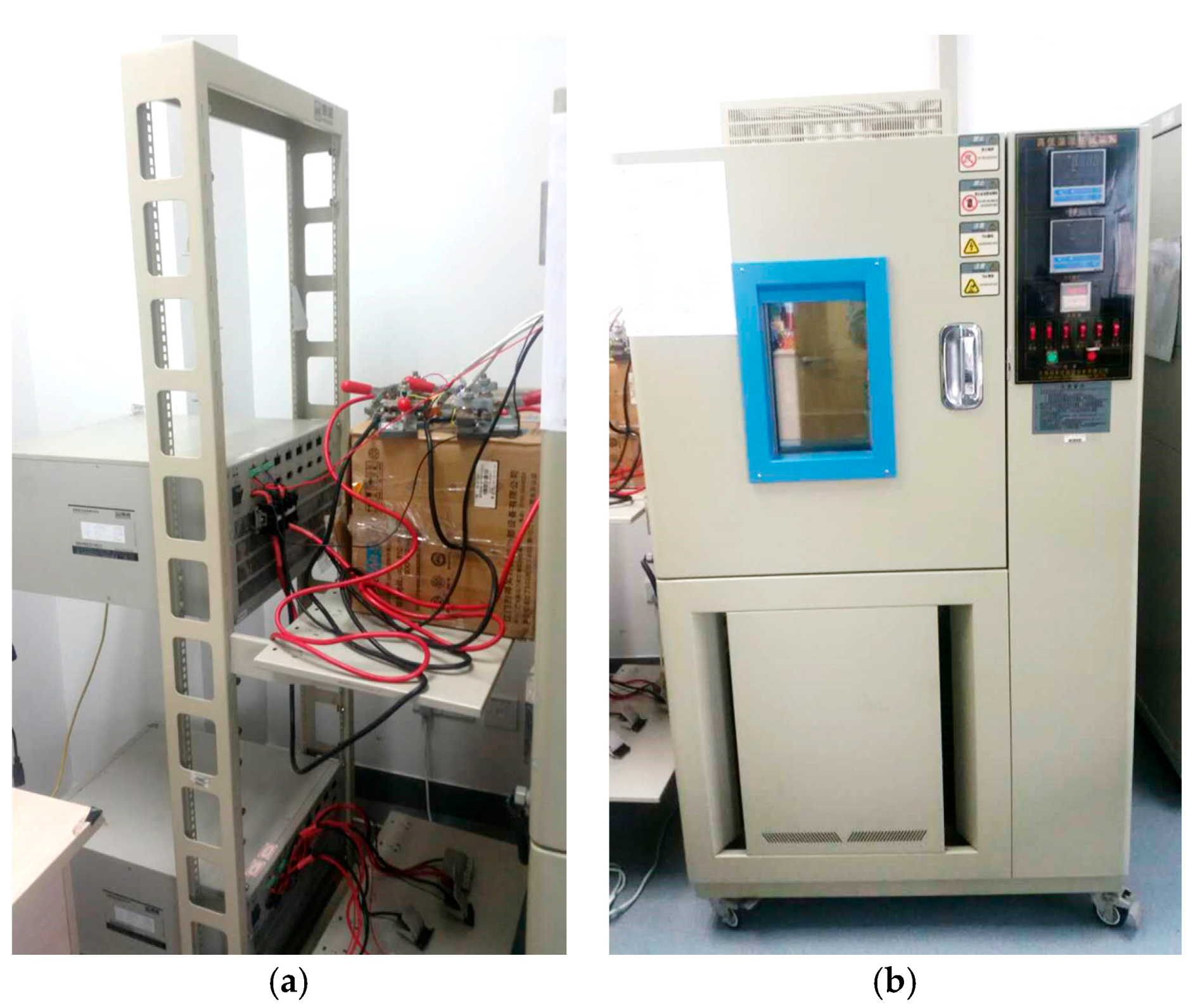
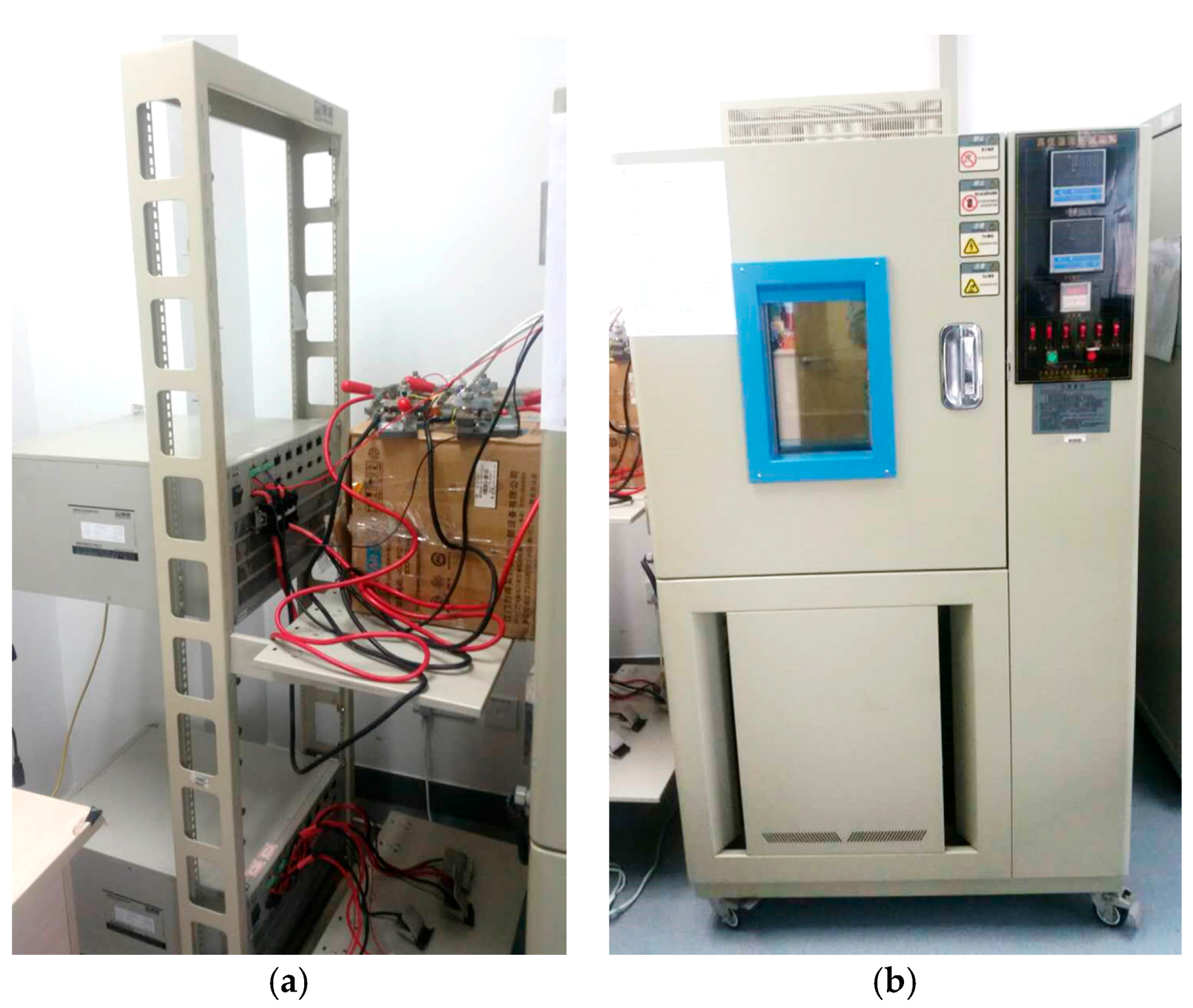
4.1. Experiment Platform
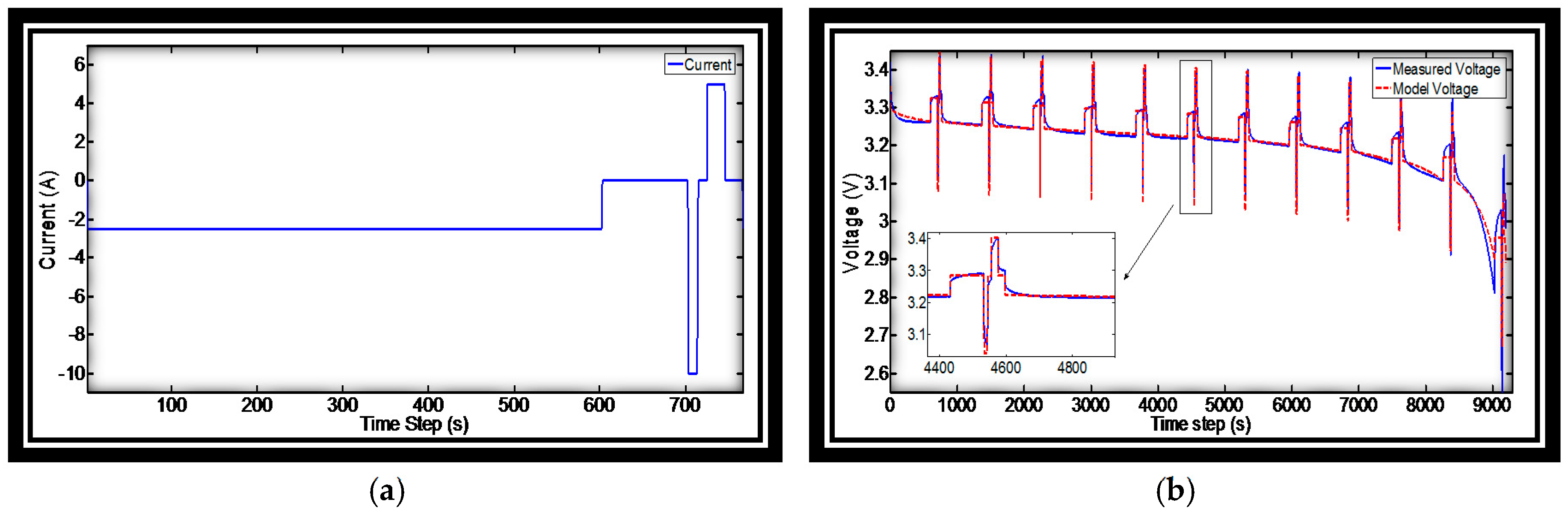
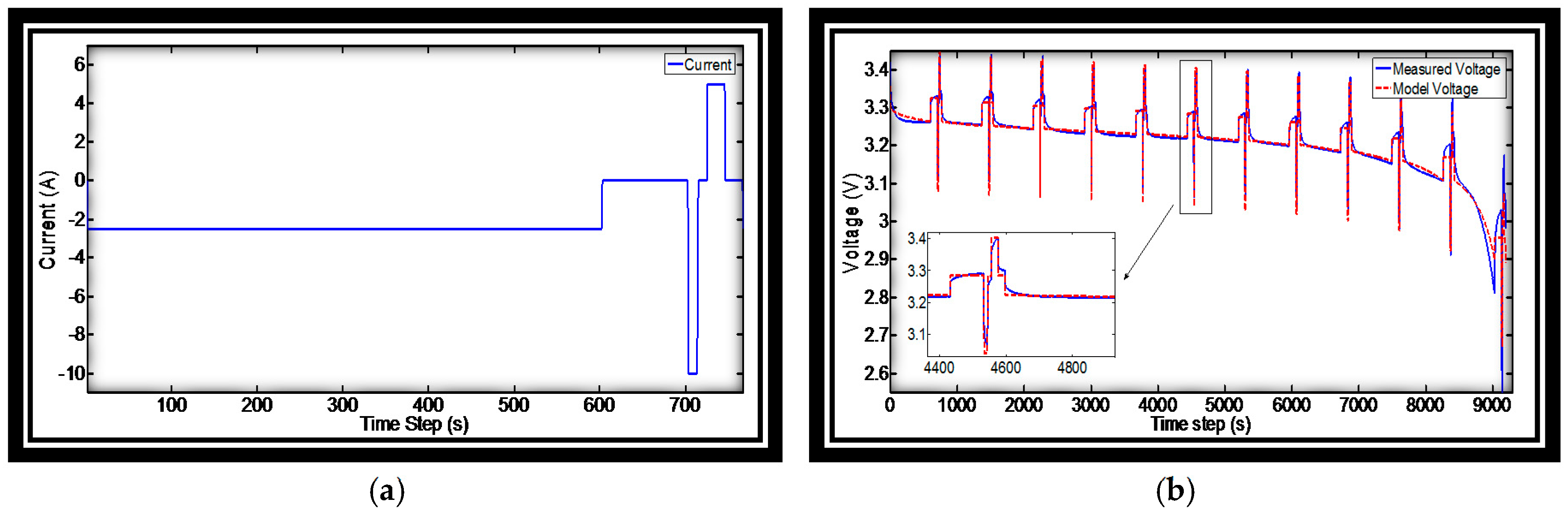
4.2. System Model Parameter Identification
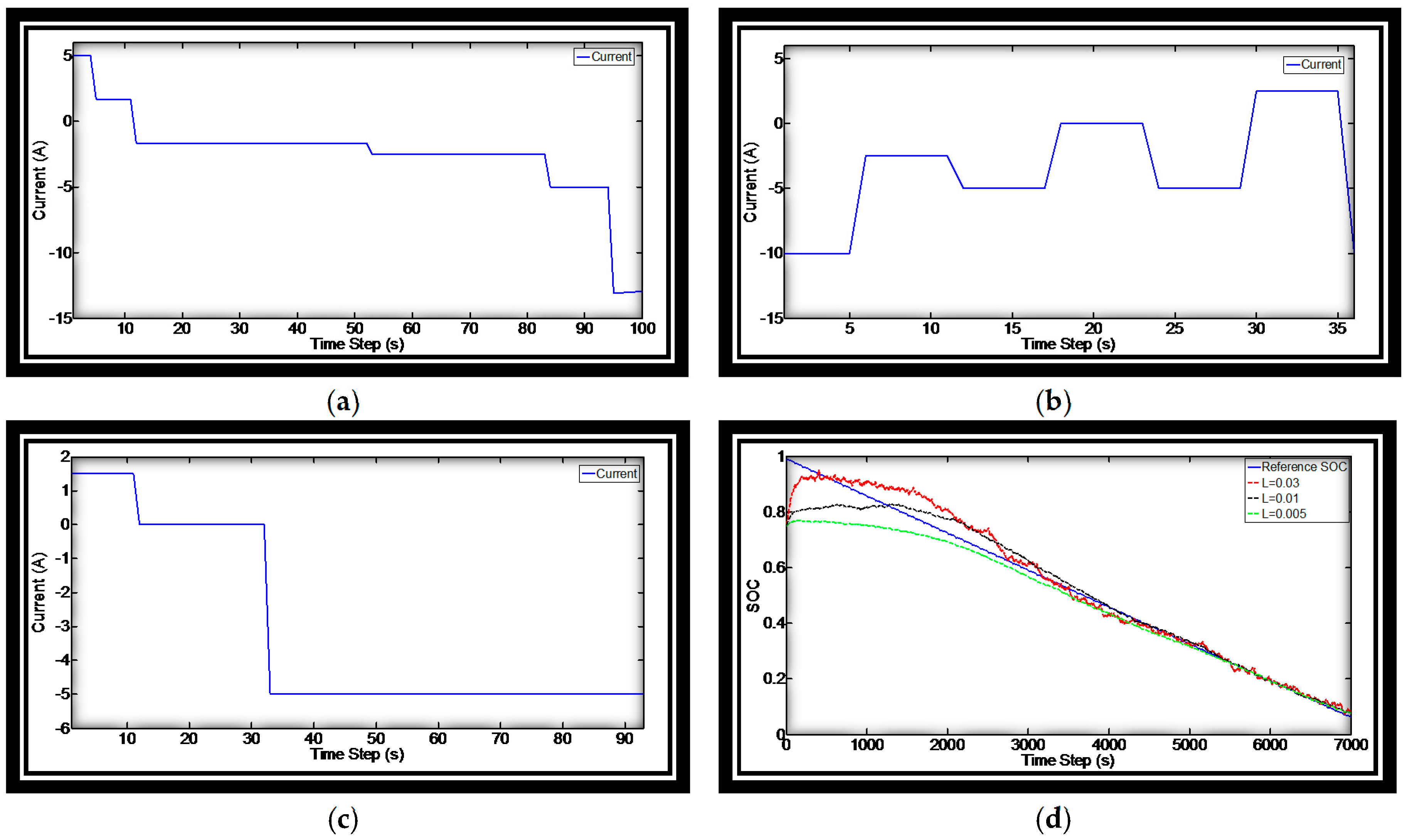
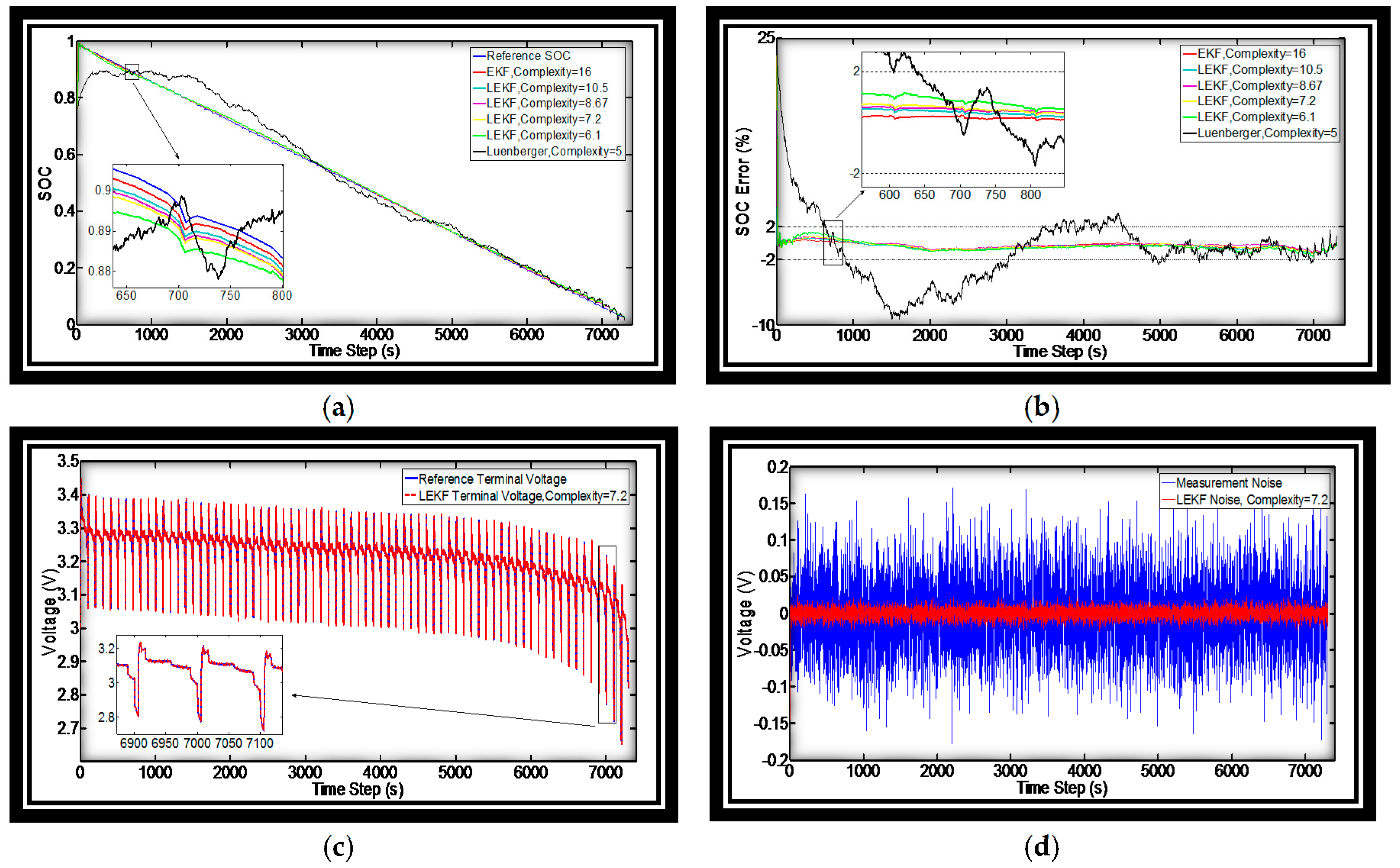
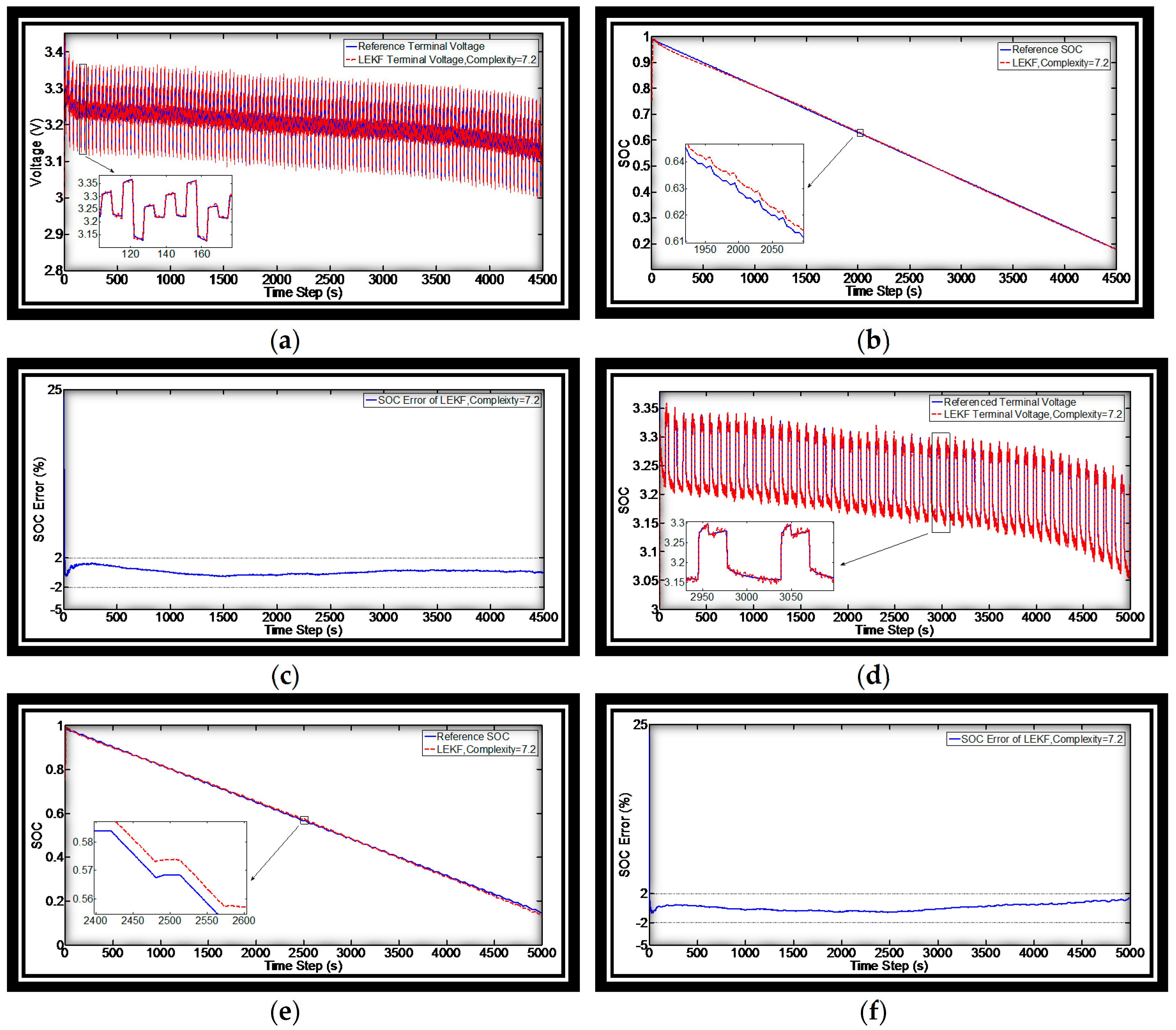
4.3. Verification of the Lazy-Extended Kalman Filter Method
5. Conclusions
- (1)
- Lower computational complexity while maintaining the estimation with near optimal accuracy;
- (2)
- Incorporating a tuning-free observer with no gain parameters to be tuned based on experience or by trial-and-error; and
- (3)
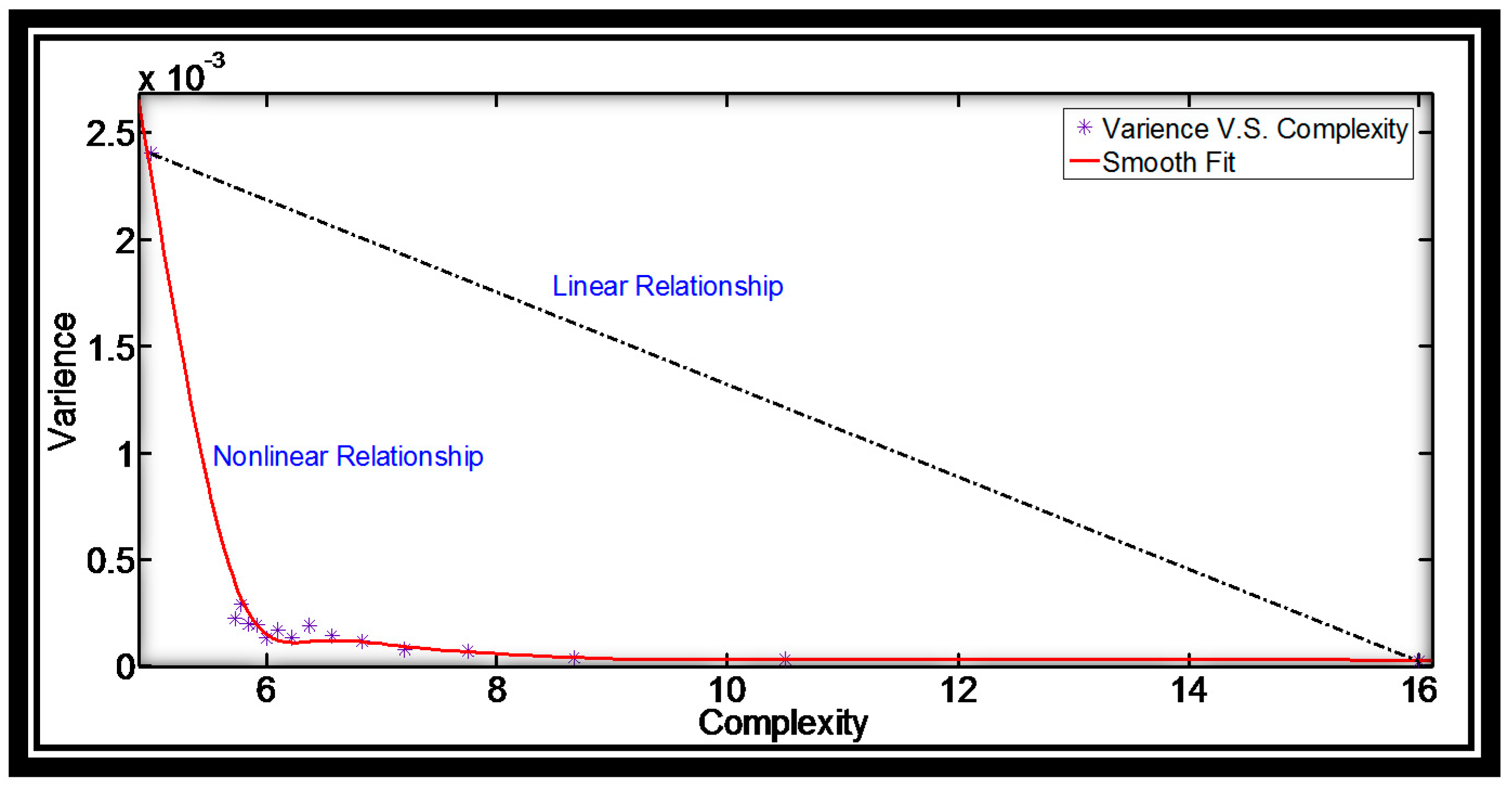
- Algorithm complexity is controlled by a single variable, NC.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lim, K.; Bastawrous, H.A.; Duong, V.-H.; See, K.W.; Zhang, P.; Dou, S.X. Fading Kalman filter-based real-time state of charge estimation in LiFePO4 battery-powered electric vehicles. Appl. Energy 2016, 169, 40–48. [Google Scholar] [CrossRef]
- Thackeray, M.M.; Wolverton, C.; Isaacs, E.D. Electrical energy storage for transportation—Approaching the limits of, and going beyond, lithium-ion batteries. Energy Environ. Sci. 2012, 5, 7854–7863. [Google Scholar] [CrossRef]
- Etacheri, V.; Marom, R.; Elazari, R.; Salitra, G.; Aurbach, D. Challenges in the development of advanced Li-ion batteries: A review. Energy Environ. Sci. 2011, 4, 3243–3262. [Google Scholar] [CrossRef]
- Lu, L.; Han, X.; Li, J.; Hua, J.; Ouyang, M. A review on the key issues for lithium-ion battery management in electric vehicles. J. Power Sources 2013, 226, 272–288. [Google Scholar] [CrossRef]
- Kalawoun, J.; Biletska, K.; Suard, F.; Montaru, M. From a novel classification of the battery state of charge estimators toward a conception of an ideal one. J. Power Sources 2015, 279, 694–706. [Google Scholar] [CrossRef]
- Ng, K.S.; Moo, C.-S.; Chen, Y.-P.; Hsieh, Y.-C. Enhanced coulomb counting method for estimating state-of-charge and state-of-health of lithium-ion batteries. Appl. Energy 2009, 86, 1506–1511. [Google Scholar] [CrossRef]
- Yang, N.; Zhang, X.; Li, G. State of charge estimation for pulse discharge of a LiFePO4 battery by a revised Ah counting. Electrochim. Acta 2015, 151, 63–71. [Google Scholar] [CrossRef]
- Lee, S.; Kim, J.; Lee, J.; Cho, B. State-of-charge and capacity estimation of lithium-ion battery using a new open-circuit voltage versus state-of-charge. J. Power Sources 2008, 185, 1367–1373. [Google Scholar] [CrossRef]
- Dang, X.; Yan, L.; Xu, K.; Wu, X.; Jiang, H.; Sun, H. Open-circuit voltage-based state of charge estimation of lithium-ion battery using dual neural network fusion battery model. Electrochim. Acta 2016, 188, 356–366. [Google Scholar] [CrossRef]
- Rodrigues, S.; Munichandraiah, N.; Shukla, A. A review of state-of-charge indication of batteries by means of ac impedance measurements. J. Power Sources 2000, 87, 12–20. [Google Scholar] [CrossRef]
- Hu, X.; Sun, F.; Zou, Y. Estimation of state of charge of a lithium-ion battery pack for electric vehicles using an adaptive Luenberger observer. Energies 2010, 3, 1586–1603. [Google Scholar] [CrossRef]
- Luenberger, D.G. Observers for multivariable systems. IEEE Trans. Autom. Control 1966, 11, 190–197. [Google Scholar] [CrossRef]
- Tang, X.; Wang, Y.; Chen, Z. A method for state-of-charge estimation of LiFePO4 batteries based on a dual-circuit state observer. J. Power Sources 2015, 296, 23–29. [Google Scholar] [CrossRef]
- Xu, J.; Mi, C.C.; Cao, B.; Deng, J.; Chen, Z.; Li, S. The state of charge estimation of lithium-ion batteries based on a proportional-integral observer. IEEE Trans. Veh. Technol. 2014, 63, 1614–1621. [Google Scholar]
- Cai, C.; Du, D.; Liu, Z.; Ge, J. State-of-charge (SOC) estimation of high power Ni-MH rechargeable battery with artificial neural network. In Proceedings of the 9th International Conference on Neural Information Processing (ICONIP’02), Orchid Country Club, Singapore, 18–22 November 2002; pp. 824–828.
- Sheng, H.; Xiao, J. Electric vehicle state of charge estimation: Nonlinear correlation and fuzzy support vector machine. J. Power Sources 2015, 281, 131–137. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, C.; Chen, Z. A method for state-of-charge estimation of LiFePO4 batteries at dynamic currents and temperatures using particle filter. J. Power Sources 2015, 279, 306–311. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, C.; Chen, Z. On-line battery state-of-charge estimation based on an integrated estimator. Appl. Energy 2015. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 2. Modeling and identification. J. Power Sources 2004, 134, 262–276. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, C.; Chen, Z. A method for state-of-charge estimation of Li-ion batteries based on multi-model switching strategy. Appl. Energy 2015, 137, 427–434. [Google Scholar] [CrossRef]
- Li, D.; Ouyang, J.; Li, H.; Wan, J. State of charge estimation for LiMn2O4 power battery based on strong tracking sigma point Kalman filter. J. Power Sources 2015, 279, 439–449. [Google Scholar] [CrossRef]
- Dong, G.; Zhang, X.; Zhang, C.; Chen, Z. A method for state of energy estimation of lithium-ion batteries based on neural network model. Energy 2015, 90, 879–888. [Google Scholar] [CrossRef]
- Sepasi, S.; Roose, L.R.; Matsuura, M.M. Extended Kalman filter with a fuzzy method for accurate battery pack state of charge estimation. Energies 2015, 8, 5217–5233. [Google Scholar] [CrossRef]
- Sepasi, S.; Ghorbani, R.; Liaw, B.Y. Inline state of health estimation of lithium-ion batteries using state of charge calculation. J. Power Sources 2015, 299, 246–254. [Google Scholar] [CrossRef]
- Sepasi, S.; Ghorbani, R.; Liaw, B.Y. A novel on-board state-of-charge estimation method for aged Li-ion batteries based on model adaptive extended Kalman filter. J. Power Sources 2014, 245, 337–344. [Google Scholar] [CrossRef]
- Nikdel, M. Various battery models for various simulation studies and applications. Renew. Sustain. Energy Rev. 2014, 32, 477–485. [Google Scholar]
- Barillas, J.K.; Li, J.; Günther, C.; Danzer, M.A. A comparative study and validation of state estimation algorithms for Li-ion batteries in battery management systems. Appl. Energy 2015, 155, 455–462. [Google Scholar] [CrossRef]
- Shi, L.; Epstein, M.; Murray, R.M. Kalman filtering over a packet-dropping network: A probabilistic perspective. IEEE Trans. Autom. Control 2010, 55, 594–604. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 1. Background. J. Power Sources 2004, 134, 252–261. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]
- Sinopoli, B.; Schenato, L.; Franceschetti, M.; Poolla, K.; Jordan, M.; Sastry, S.S. Kalman filtering with intermittent observations. IEEE Trans. Autom. Control 2004, 49, 1453–1464. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Battery Type | Battery Capacity | Device Model |
|---|---|---|
| OPTIMUM 32650 | 5.00 Ah (Manufacturer Data) | Electronic Load: Sunway CT3002W |
| Battery 1 | 5.13 Ah (Experimental Data) | Thermal Chamber: Bole GDS150 |
| Parameter | Battery 1 | Unit |
|---|---|---|
| Eo | 3.3451 | V |
| r | 0.0242 | Ω |
| k0 | 0.0080 | V |
| k1 | 0.0500 | V |
| k2 | 0.0477 | V |
| k3 | −0.0154 | V |
| Algorithms | Complexity (Based on Equation (15)) | Operating Time | Mean Absolute SOC Estimation Error |
|---|---|---|---|
| EKF | 16 | 0.166132 s | 0.70% |
| LEKF, NC = 2 | 10.2 | 0.108353 s | 0.75% |
| LEKF, NC = 3 | 8.67 | 0.075501 s | 0.92% |
| LEKF, NC = 5 | 7.2 | 0.049359 s | 1.12% |
| LEKF, NC = 10 | 6.1 | 0.040920 s | 1.48% |
| LEKF, NC = 20 | 5.55 | 0.022172 s | 2.52% |
| Luenberger | 5 | 0.016095 s | 4.67% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, X.; Liu, B.; Gao, F.; Lv, Z. State-of-Charge Estimation for Li-Ion Power Batteries Based on a Tuning Free Observer. Energies 2016, 9, 675. https://doi.org/10.3390/en9090675
Tang X, Liu B, Gao F, Lv Z. State-of-Charge Estimation for Li-Ion Power Batteries Based on a Tuning Free Observer. Energies. 2016; 9(9):675. https://doi.org/10.3390/en9090675
Chicago/Turabian StyleTang, Xiaopeng, Boyang Liu, Furong Gao, and Zhou Lv. 2016. "State-of-Charge Estimation for Li-Ion Power Batteries Based on a Tuning Free Observer" Energies 9, no. 9: 675. https://doi.org/10.3390/en9090675