Double-Threshold Cooperative Spectrum Sensing Algorithm Based on Sevcik Fractal Dimension

College of Information and Communication Engineering, Harbin Engineering University, Harbin 150001, China
*
Author to whom correspondence should be addressed.
†
Current address: College of Information and Communication Engineering, Harbin Engineering University, Harbin 150001, China.
‡
These authors contributed equally to this work.
Algorithms 2017, 10(3), 96; https://doi.org/10.3390/a10030096
Submission received: 15 July 2017
/
Revised: 14 August 2017
/
Accepted: 17 August 2017
/
Published: 21 August 2017
Abstract
:Spectrum sensing is of great importance in the cognitive radio (CR) networks. Compared with individual spectrum sensing, cooperative spectrum sensing (CSS) has been shown to greatly improve the accuracy of the detection. However, the existing CSS algorithms are sensitive to noise uncertainty and are inaccurate in low signal-to-noise ratio (SNR) detection. To address this, we propose a double-threshold CSS algorithm based on Sevcik fractal dimension (SFD) in this paper. The main idea of the presented scheme is to sense the presence of primary users in the local spectrum sensing by analyzing different characteristics of the SFD between signals and noise. Considering the stochastic fluctuation characteristic of the noise SFD in a certain range, we adopt the double-threshold method in the multi-cognitive user CSS so as to improve the detection accuracy, where thresholds are set according to the maximum and minimum values of the noise SFD. After obtaining the detection results, the cognitive user sends local detection results to the fusion center for reliability fusion. Simulation results demonstrate that the proposed method is insensitive to noise uncertainty. Simulations also show that the algorithm presented in this paper can achieve high detection performance at the low SNR region.
1. Introduction
With the rapidly increasing data rate requirements of mobile users on multimedia applications, the accessible radio spectrum is becoming critically scarce. Under traditionally fixed spectrum allocation policy, some licensed bands are overcrowded, while many others are underutilized. Cognitive radio (CR) arises as a tempting solution to the spectrum congestion problem by enabling secondary users (cognitive users or SUs) to have opportunistic access to underutilized licensed bands that are lightly occupied by primary users (non-cognitive users or PUs) [1]. It is crucial to sense the spectrum holes efficiently and determine the presence of primary users correctly in a CR network. Therefore, spectrum sensing is considered as the premise and foundation of cognitive radio systems [2].
Energy detection [3] possesses low computational costs and is easily implemented. However, it is sensitive to noise uncertainty and performs poorly in the low signal-to-noise ratio (SNR) region. In [4], a low-complexity heuristic decision-making system for the selection of methods was proposed aimed at detecting spectrum availability. An optimization approach for multi-band linear collaborative spectrum sensing based on harmony search heuristics was provided by [5]. The problem of maximizing the ratio of the transmission duration over the entire sensing cycle was studied in [6]. Lee et al. proposed an algorithm for the detection of unknown low-power constant-modulus signals in noise of unknown variance for cognitive radio networks [7]. An effective method for application to cooperative sensing for positioning in the presence of correlated observations, was provided by [8]. The test in [8] combines the OR and the majority voting rules at once, recovering all those unlucky detection cases that are not sensed due to strong shadowing. The authors in [9] provided a fair comparison between the soft and hard schemes in terms of energy efficiency. The cyclostationary feature detection method [10] detects the signal in terms of the characteristic of the cyclic frequency in the signal spectral correlation function. Therefore, it needs a larger amount of computation due to the fact that it is subject to the signal spectral correlation function.
Recently, fractal geometry has been widely used in signal recognition, digital image processing, and other fields. A spectrum sensing algorithm based on fractal dimension obtains the detection information of spectrum sensing without the prior information of the primary user by using the frequency domain fractal dimension of the signal. Furthermore, it has strong anti-noise ability and low computational complexity [11,12]. Owing to the above advantages, spectrum sensing algorithms based on fractal dimension has become a research focus. The authors in [13] studied the impact of the range of fractal values, ambient noise levels, and the length of the observation window on the detection result, and concluded that the environment and conditions should be considered when using the fractal dimension method. A spectrum sensing algorithm based on two-dimensional detection was proposed in [14]. Though its computational complexity was low, the detection effect in low SNR environments could not meet expectations. A dynamic cooperative spectrum sensing (CSS) based on box dimension was presented by [15]. However, this method had poor detection accuracy in the low SNR region due to limitations of box dimension. In [16], a CSS method based on the correlation box dimension was proposed, which eliminated the effect of noise by using the signal autocorrelation operation in the local detection and thus achieved better detection effect. Nevertheless, the autocorrelation operation increased its complexity. The cognitive ultra-wideband (CWUB) spectrum sensing was studied in [17], where the fractal box dimension was used for double-threshold CSS and the information dimension was used to identify the signal. However, it is difficult to identify certain signals by information dimension, and the use of two fractal dimensions increases the computational complexity. The Sevcik fractal dimension (SFD) was used in [18], with which the accuracy of local spectrum sensing was improved and the drawback that the box dimension cannot sense the signal of some modulation modes was overcome.
Noise power changes with time and physical position in the practical communication environment; moreover, there exists a certain deviation for receivers to estimate noise power. Thus, noise uncertainty can seriously affect the accuracy of spectrum sensing. The proposed algorithm senses the presence of primary users based on analyzing different characteristics of the SFD between signals and noise. The proposed scheme first transforms the received PU’s signal into a frequency signal by discrete Fourier transform (DFT) and then calculates the SFD of the frequency signal. The judgment is conducted by comparing the above SFD value with the threshold, where the noise SFD is selected as the decision threshold. Since the noise SFD changes randomly in a certain range, the single threshold method cannot meet the requirement of detection precision when the SNR is low or the noise is uncertain. To address this, we resort to the double-threshold method in local sensing. Furthermore, multi-user CSS method is adopted to promote the reliability of sensing results and the detection accuracy. The simulation results demonstrate that the proposed method achieves better detection performance at low SNR. Simulation results also show that the scheme presented in this paper has the advantage of insensitivity to noise uncertainty and is less affected by signal modulation parameters.
2. Double-Threshold Cooperative Spectrum Sensing Algorithm Based on Sevcik Fractal Dimension
2.1. The Noise Sevcik Fractal Dimension
The SFD of the modulated signal and that of noise have different randomness, so the spectrum sensing model can be constructed using this difference. In the following, we first discuss the calculation of SFD.
Assume that the signal waveform whose length is N consists of the point , . We first normalize the waveform.
where is the maximum value of , and and respectively denote the maximum and minimum value of . The total length of the curve is calculated as
The communication signal sequence is a continuous positive integer and , thus and . Equations (1) and (3) are equivalent to
The SFD of the signal is
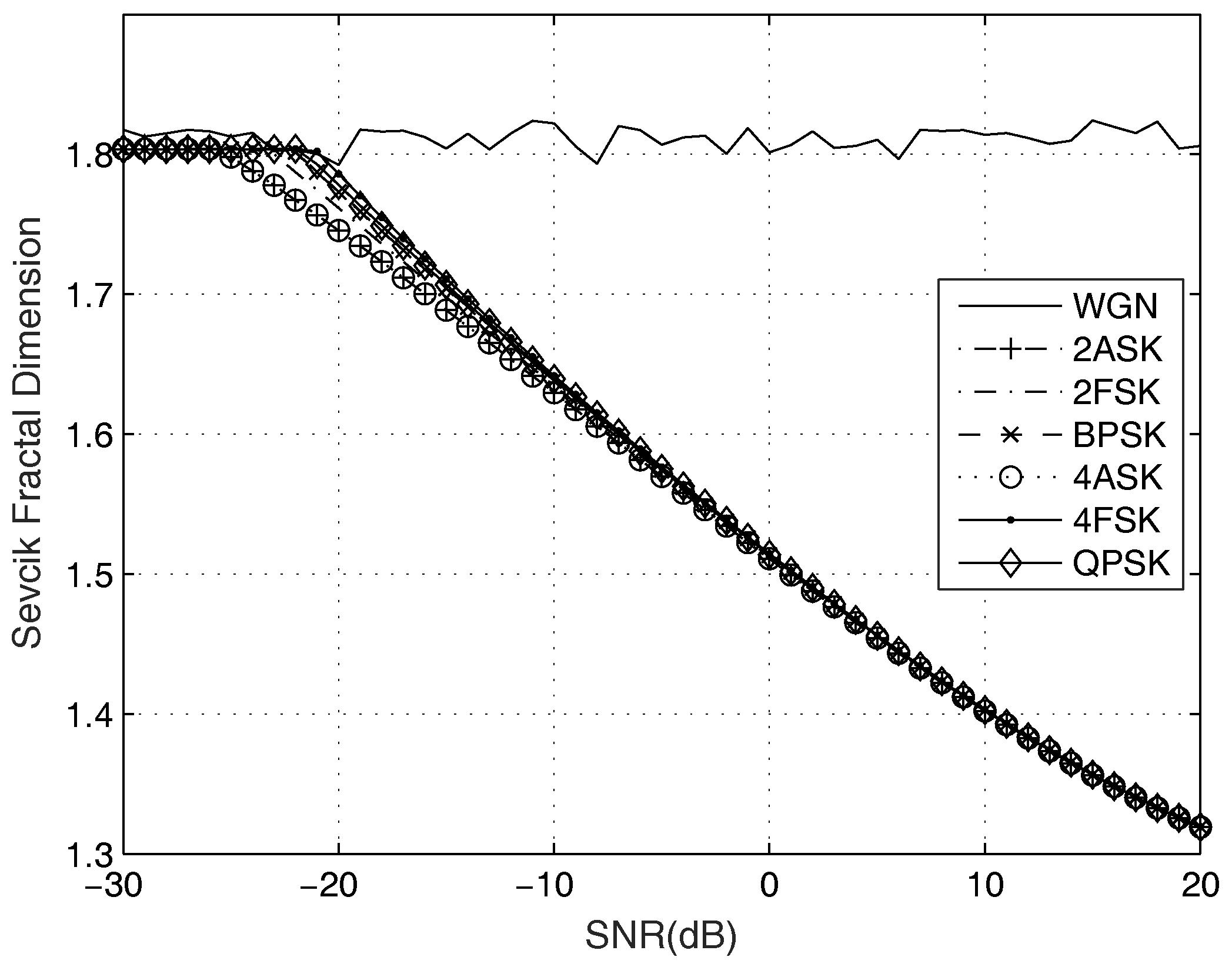
The SFDs of different kinds of signals are simulated in Figure 1, where the signals include: 2 amplitude shift keying (2ASK), 2 frequency shift keying (2FSK), 2 phase shift keying (2PSK), 4ASK, 4FSK, quadrature phase shift keying (QPSK) and white Gaussian noise signal. The simulation parameters are set as follows: bandwidth , carrier frequency , sampling frequency , baseband symbol rate , the frequency deviation of the 2FSK signal is 5000 Hz, and the frequency deviation of the 4FSK signal is 2500 Hz. The noise is additive white Gaussian noise (AWGN). Observing Figure 1, the noise SFD fluctuates randomly between 1.79 and 1.83 with the SNR increasing, whereas the SFDs of the six kinds of modulation signals are decreasing with SNR. From the figure, the SFDs of the modulation signals are gradually separated from the noise SFD for SNRs greater than −25 dB. It can be inferred that the noise SFD can be set as the threshold when using SFD in spectrum sensing, and thus the signal can be distinguished from noise when the SNR is greater than a certain value.
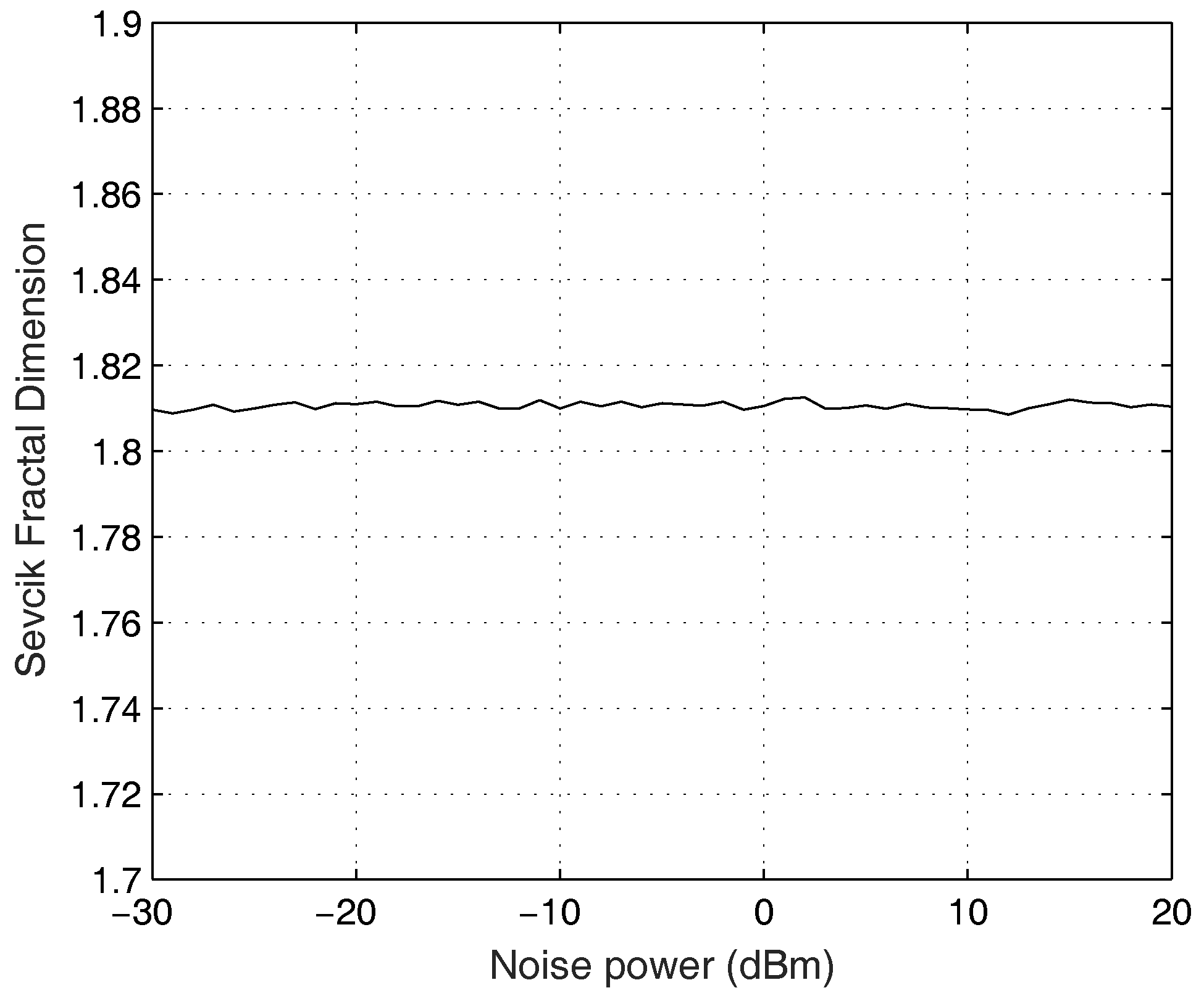
The fluctuation of noise power could affect the performance of spectrum sensing, and thus result in the detection probability decreasing or the false alarm probability increasing. In order to further prove that the calculation of SFD is insensitive to Gaussian noise, we analyze the influence of noise power on SFD.
The received signal follows the Gaussian distribution when there is no primary user. Applying N-point discrete Fourier transform (DFT) to :
Since is a linear combination of , it also follows the Gaussian distribution. The mean and variance of are expressed as
where and respectively denote mean and variance.
Assume , both the real and imaginary parts of the received signal follow the Gaussian distribution .
Let denote the modulus of , which is calculated by . Therefore, follows a Rayleigh distribution with parameter . and respectively represent the probability density function and cumulative distribution function.
Thus,
We perform normalization to according to (1) and (2). is regarded as a constant. Therefore, the mean and variance of after normalization are expressed as
According to previous analysis, because , we only discuss the expectations of in Formula (3).
has been regarded as a constant so far. However, is related to under the specific distribution:
where C is a constant which is calculated as follows:
where . According to (5), (6), (16), and (17), we have
As seen from (19), has no correlation with noise power . Thus, SFD is insensitive to noise uncertainty.
Figure 2 calculates the SFD of white Gaussian noise versus different power. Sequence length N = 4000. From the figure, the mean change range of Gaussian white noise SFD is smaller, which always fluctuates near 1.811 when noise power changes within the range –20,dBm. Simulation results validate that the noise SFD values have no correlation with noise power, which means that SFD can overcome the influence of noise uncertainty to a certain extent.
2.2. System Model of the Proposed Algorithm
Local spectrum sensing on the basis of SFD can be formulated as the following binary hypothesis problem:
where is the independently and identically distributed AWGN with mean 0 and variance . is the received signal of the cognitive user. Hypothesis and represent the absence and presence of the PU, respectively. Primary signal can either be a deterministic signal (accounting for AWGN channel) or a stochastic signal (corresponding to channel characteristics like fading) with mean and variance . and are mutually independent. follows the following distribution:
The SFD of the signal fluctuates little with the SNR, and it can be distinguished from the SFD of Gaussian white noise. Therefore, SFD can be used to distinguish the signal and noise. The block diagram of spectrum sensing system based on SFD in the frequency domain is shown in Figure 3. Firstly, the received primary user signal is transformed into the frequency domain by DFT, and then SFD is calculated.
In the following, we illustrate the spectrum sensing scheme based on SFD in detail. Firstly, applying DFT to (20), we have the frequency domain form of the received signal:
, , and respectively represent the complex spectrum of , , and . We perform normalization to .
Since is the DFT transform of , we set . Equation (23) can be simplified into:
Equation (25) is the local spectrum sensing decision expression based on SFD. If the SFD of the received signal calculated by the SU is less at than the decision threshold , the judgment that is the PU exists; otherwise, the judgment is that the PU does not exist.
As mentioned earlier, we can select a typical noise SFD value as the decision threshold . However, the noise SFD randomly changes in a certain range, leading to better detection performance at high SNR and poor performance when the SNR is low or noise is uncertain. Therefore, the drawback would be revealed if we use the single threshold method shown in (25): when the SFD of the signal falls within the fluctuation range of the noise SFD, the signal and noise would be easily confused, leading to the inaccurate judgement of the PU’s presence, and thus increasing the false alarm probability or even misjudgment. The single threshold cannot meet the requirement of detection precision due to channel environment change and noise uncertainty in practical application. Therefore, based on the existing double-threshold spectrum sensing theory, we propose a double-threshold CSS strategy based on SFD.
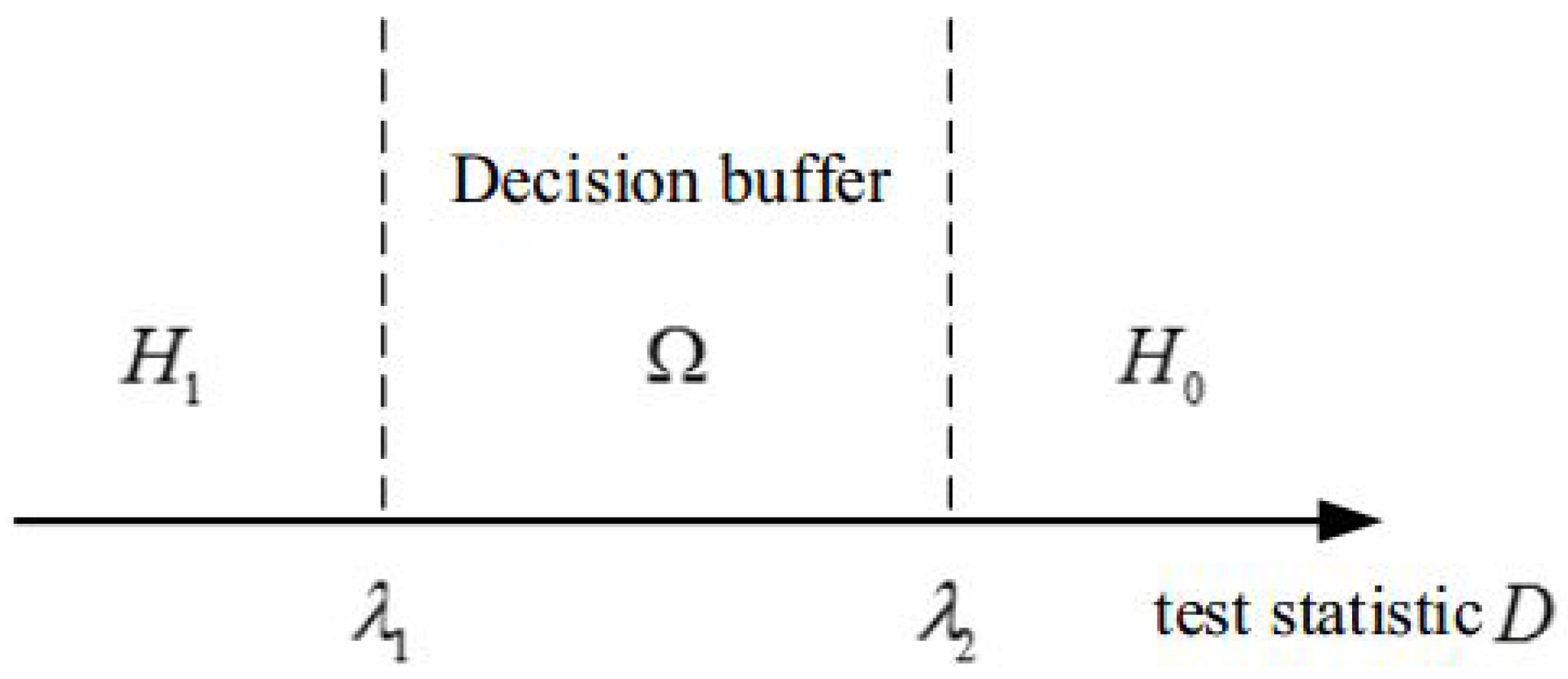
Figure 4 shows the double-threshold decision. We select the maximum and minimum values of the noise SFD as the two thresholds, where , , and .
Considering that noise power in the wireless environment has a random change, we resort to the dynamic detection method in each sensing cycle, where the best decision thresholds are decided by the real-time calculation of the noise SFD.
Condition 1: if , then the decision is .
Condition 2: if , then the decision is .
Condition 3: if , this region is called “decision buffer” and the decision is the uncertain state due to the fact that the SFD of the received signal falls within the random fluctuation range of the noise SFD.
SUs participating in the CSS send the local decision results and as hard decision information to the fusion center (FC). If the decision is uncertain state, the test statistic D is sent as the soft decision information to the FC for decision.
Assume the FC receives Z local decision results sent by SUs, in which the number of the hard decision information is K and correspondingly the number of the soft decision information is .
The fusion rule for the soft decision information at the FC is shown as follows:
where represents one of the soft decision information and is the threshold for the reliability fusion at the FC. In practice, can be calculated by
where , is the correction, . Since the two thresholds are set in terms of the maximum and minimum values of the noise SFD, their range of variation is related to the current spectral environment and the noise background, and thus needs to be adjusted according to the actual situation.
The OR rule is adopted as the final decision so as to maximize the global detection probability. The FC makes the fusion decision based on the hard decision information and the soft decision information. The final decision is expressed as:
where is the final decision result at the FC.
3. Simulation
Simulation experiments are under AWGN environment without channel fading effects. The signal of the PU is the modulated QPSK signal. Signal parameters are set the same as that of Section 2.1. Bandwidth kHz and carrier frequency kHz. The sampling frequency at the cognitive receiver is set as kHz. Baseband symbol rate bit/s. Assume that the number of collaborative SUs is 10. Simulation results are averaged over 1000 channels.
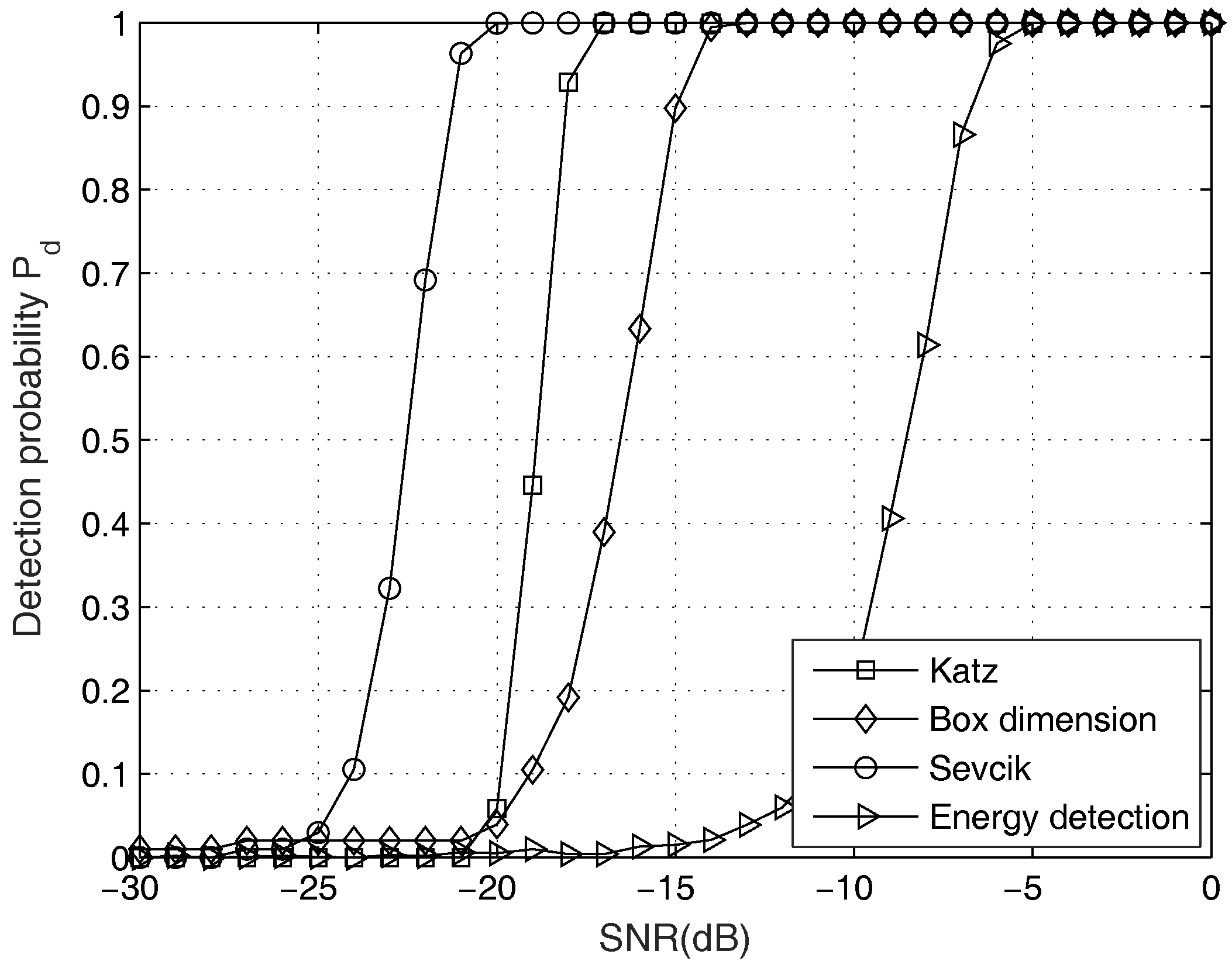
In Figure 5, we compare the detection probability of the proposed method with the Katz fractal dimension scheme (Katz), the box dimension method (Box dimension) and the energy detection algorithm. According to Figure 2, the noise fractal dimension is basically maintained, fluctuate around a mean value under different noise powers. Hence, the decision threshold can be determined by the value of the noise fractal dimension, and correspondingly the false alarm probability is a constant which is set as . The values of the threshold and the correction in different schemes are shown in Table 1.
Observing Figure 5, the detection probabilities of the three fractal dimension algorithms all outperform energy detection. The proposed scheme achieves 100% detection probability at −20 dB, whereas Katz fractal dimension and box dimension attains 100% detection probability at −17 dB and −13 dB, respectively. It can be inferred that the double-threshold CSS algorithm based on SFD improves the detection performance in low SNR environment.
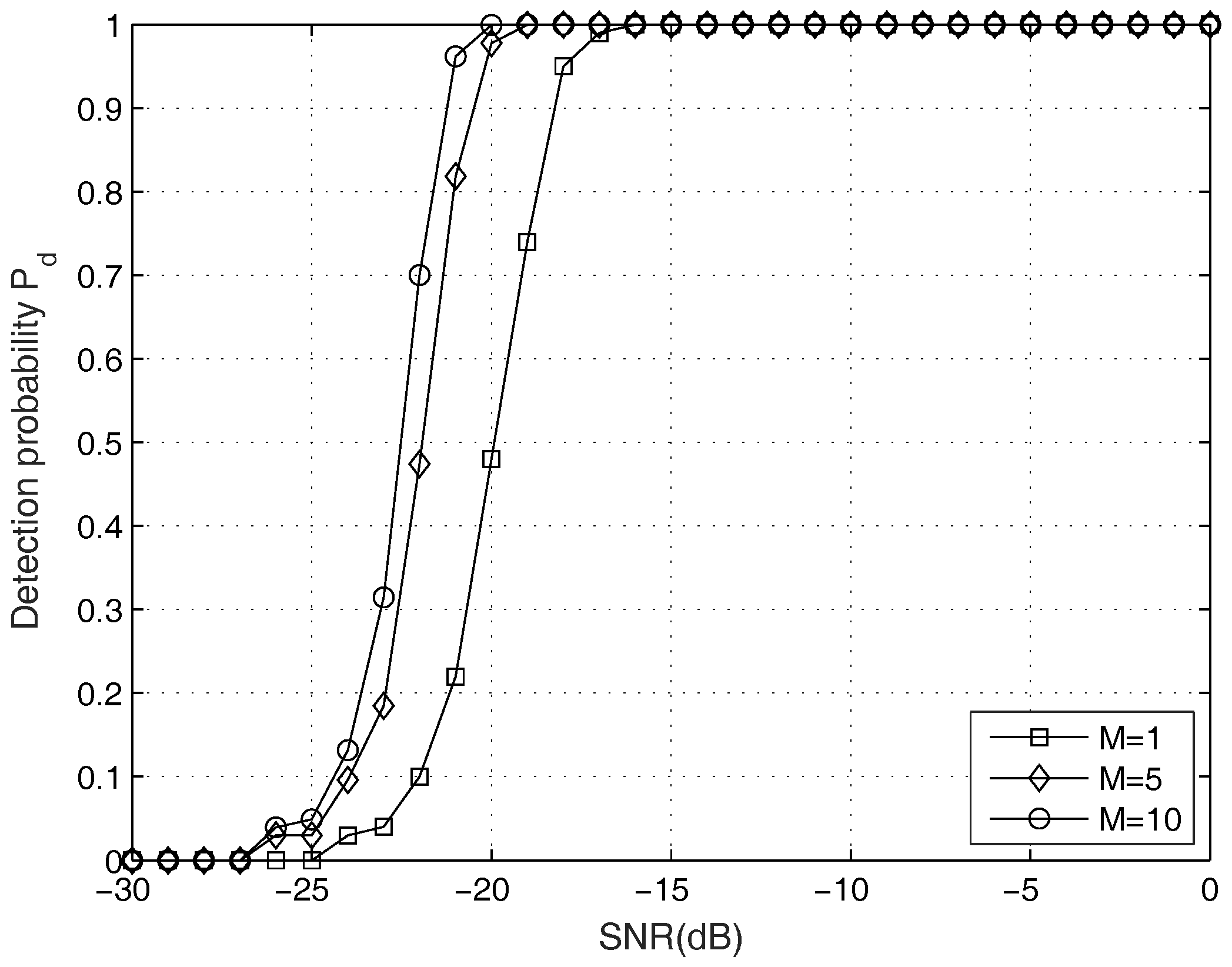
Figure 6 investigates the influence of the number of SUs on the detection performance when applying the proposed algorithm. We consider and let the average SNR at each secondary receiver be the same. As seen from the figure, the detection performance of the proposed scheme gets better when the number of cognitive users involved in collaborative sensing increases. We compare the detection performance of the proposed algorithm with that of the single threshold CSS algorithm based on SFD in Figure 7, where the threshold in the single threshold detection equals to the average noise SFD . The double-threshold method achieves 100% detection probability at −20 dB, which is 1 dB higher than that of the single threshold method. It can be demonstrated that the proposed approach benefits from higher detection performance compared with the single threshold CSS scheme based on SFD.
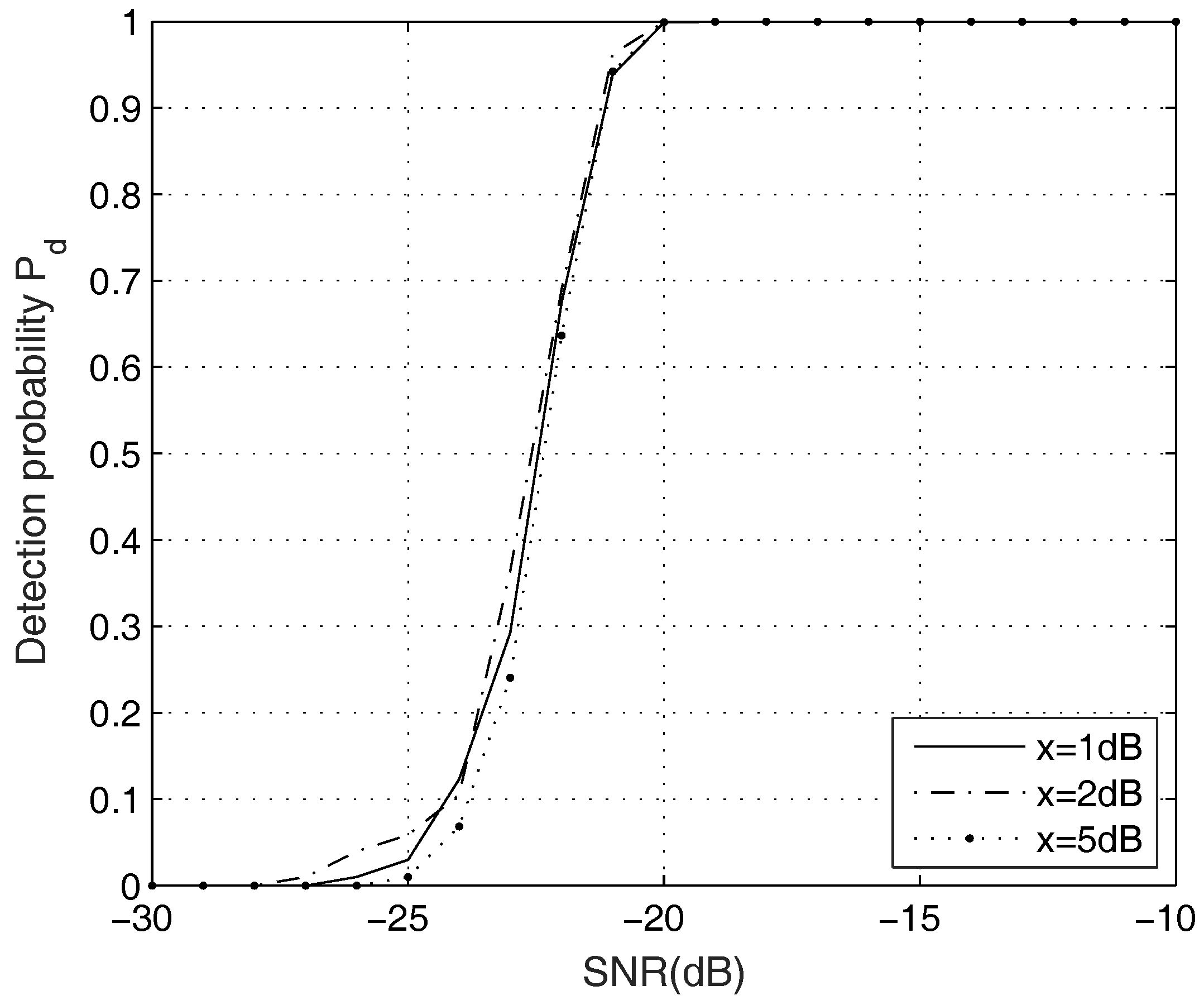
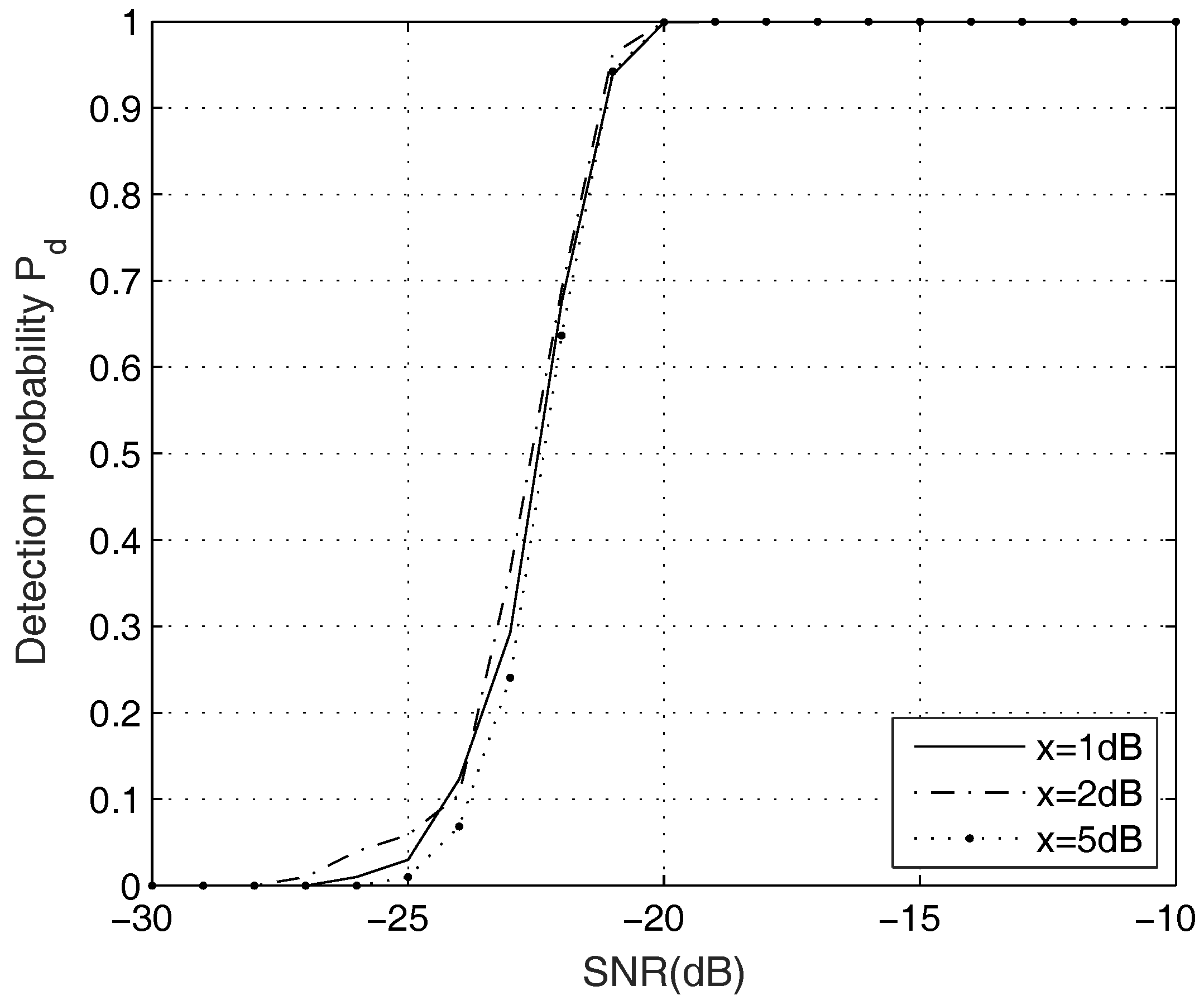
In Figure 8, the detection performance of the proposed algorithm is plotted when the noise uncertainty is 1 dB, 2 dB, and 5 dB, respectively. As expected, noise uncertainty had little impact on the detection performance of the proposed method, which means the proposed scheme is insensitive to noise uncertainty. Furthermore, even in the case of 5 dB noise uncertainty, the proposed scheme still obtains 100% detection probability when the SNR is greater than −20 dB, and it can achieve more than 90% detection probability when the SNR is greater than −21 dB. Therefore, the algorithm presented by this paper can not only be insensitive to noise uncertainty, but also achieve high detection performance at low SNR.
4. Conclusions
According to the different SFD characteristics of the signal and noise, a double-threshold CSS algorithm based on SFD is proposed in this paper. Theoretical analysis and simulation show that the proposed scheme can sense some modulation signals that cannot be sensed by the box dimension; meanwhile, it is insensitive to noise uncertainty. Considering the characteristic of the noise SFD fluctuating within a certain range, the double-threshold is adopted in the multi-user cooperation sensing. Simulation experiments are under AWGN environment without channel fading effects. The results show that the SFD algorithm can achieve high detection probability at low SNR region and the double-threshold cooperative sensing effectively improves the accuracy of CSS. The proposed algorithm achieves a stable detection result in the case of noise uncertainty. In conclusion, the double-threshold CSS algorithm based on SFD is suitable for the fast blind spectrum sensing with low SNR and noise uncertainty, at the same time obtaining better detection results.
Acknowledgments
This research was supported by the National Natural Science Foundation of China (Grant No. 61701134), the National Natural Science Foundation of China (Grant No. 51509049), the Natural Science Foundation of Heilongjiang Province, China (Grant No. F2017004), National key research and development program of China (Grant No. 2016YFF0102806).
Author Contributions
The idea of this work was proposed by Xueying Diao and Zijian Yang. Xueying Diao and Qianhui Dong performed the experiments and analyzed the simulation results. Yibing Li assisted in the research work and wrote the paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Visotsky, E.; Kuffner, S.; Peterson, R. On collaborative detection of TV transmissions in support of dynamic spectrum sharing. In Proceedings of the IEEE International Symposium on New Frontiers in Dynamic Spectrum Access Networks, Baltimore, MD, USA, 8–11 November 2005; pp. 338–345. [Google Scholar]
- Guzzon, E.; Benedetto, F.; Giunta, G. Performance improvements of OFDM signals spectrum sensing in cognitive radio. In Proceedings of the IEEE Vehicular Technology Conference, Quebec City, QC, Canada, 3–6 September 2012; pp. 1–5. [Google Scholar]
- Sobron, I.; Diniz, P.S.R.; Martins, W.A.; Velez, M. Energy detection technique for adaptive spectrum sensing. IEEE Trans. Commun. 2015, 63, 617–627. [Google Scholar] [CrossRef]
- Matinmikko, M.; Rauma, T.; Mustonen, M.; Del Ser, J. Architecture and Approach for Obtaining Spectrum Availability Information. In Proceedings of the IEEE Vehicular Technology Conference, Yokohama, Japan, 15–18 May 2011; pp. 1–5. [Google Scholar]
- Del Ser, J.; Alonso, A.; Gil-Lopez, S.; Garay, M.; Kretzschmar, U.; Astarloa, A. On the Design of an Heuristically Optimized Multiband Spectrum Sensing Approach for Cognitive Radio Systems. In Proceedings of the IEEE 17th International Workshop on Computer Aided Modeling and Design of Communication Links and Networks, Barcelona, Spain, 17–19 September 2012; pp. 168–169. [Google Scholar]
- Lee, W.Y.; Akyildiz, I.F. Optimal Spectrum Sensing Framework for Cognitive Radio Networks. IEEE Trans. Commun. 2008, 7, 3845–3857. [Google Scholar]
- Benedetto, F.; Giunta, G.; Guzzon, E.; Renfors, M. Detection of hidden users in cognitive radio networks. In Proceedings of the IEEE the International Symposium on Personal, Indoor and Mobile Radio Communications, London, UK, 8–11 September 2013; pp. 2296–2300. [Google Scholar]
- Benedetto, F.; Tedeschi, A.; Giunta, G. Cooperative spectrum sensing for positioning in cognitive radios. In Proceedings of the 11th International Symposium on Wireless Communications Systems, Barcelona, Spain, 26–29 August 2014; pp. 670–674. [Google Scholar]
- Althunibat, S.; Granelli, F. Energy efficiency analysis of soft and hard cooperative spectrum sensing schemes in cognitive radio networks. In Proceedings of the IEEE Vehicular Technology Conference, Seoul, Korea, 18–21 May 2014; pp. 1–5. [Google Scholar]
- Yang, M.; Li, Y.; Liu, X.; Tang, W. Cyclostationary feature detection based spectrum sensing algorithm under complicated electromagnetic environment in cognitive radio networks. China Commun. 2015, 12, 35–44. [Google Scholar] [CrossRef]
- Sevcik, C. A procedure to Estimate the Fractal Dimension of Waveforms. arXiv 2010, arXiv:1003.5266. Available online: https://arxiv.org/abs/1003.5266 (accessed on 18 August 2017).
- Diaz, M.H.; Cordova, F.M.; Canete, L. Order and Chaos in the Brain: Fractal Time Series Analysis of the EEG Activity During a Cognitive Problem Solving Task. Procedia Comput. Sci. 2015, 55, 1410–1419. [Google Scholar] [CrossRef]
- Esteller, R.; Vachtsevanos, G.; Echauz, J.; Litt, B. A comparison of waveform fractal dimension algorithms. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2001, 48, 177–183. [Google Scholar] [CrossRef]
- Kordan, S.B.; Abolhassani, B. Blind spectrum sensing for cognitive radio based on complexity measurement. In Proceedings of the Iranian Conference on Electrical Engineering, Tehran, Iran, 17–19 May 2011; pp. 1–4. [Google Scholar]
- Wang, R.L.; Huang, Y.; Zhang, J.Z.; Zhang, Y.C. Dynamic Cooperative Sensing Based on Fractal Dimension. Comput. Eng. 2012, 38, 89–92. [Google Scholar]
- Liu, W.T.; Chen, H.; Cai, X.X.; Yuan-Hong, W.U. Step Cooperative Spectrum Sensing Based on Related Box Dimension. Electr. Inf. Warf. Technol. 2014, 6, 97–99. [Google Scholar]
- Chen, X.; Chen, H.; Liu, J.; Cai, X. Cooperative Spectrum Sensing Based on Double Threshold Box Dimension and Information Dimension. J. Detect. Control 2011, 33, 72–76. [Google Scholar]
- Shuang, F.U.; Li, Y.B.; Ye, F.; Gao, Z.G. Fast blind spectrum sensing using Sevcik fractal dimension in frequency domain. J. Jilin Univ. 2014, 44, 854–860. [Google Scholar]
Figure 1.
Sevcik fractal dimension of different kinds of signals. ASK: amplitude shift keying; FSK: frequency shift keying; QPSK: quadrature phase shift keying; WGN: white Gaussian noise.
Figure 1.
Sevcik fractal dimension of different kinds of signals. ASK: amplitude shift keying; FSK: frequency shift keying; QPSK: quadrature phase shift keying; WGN: white Gaussian noise.
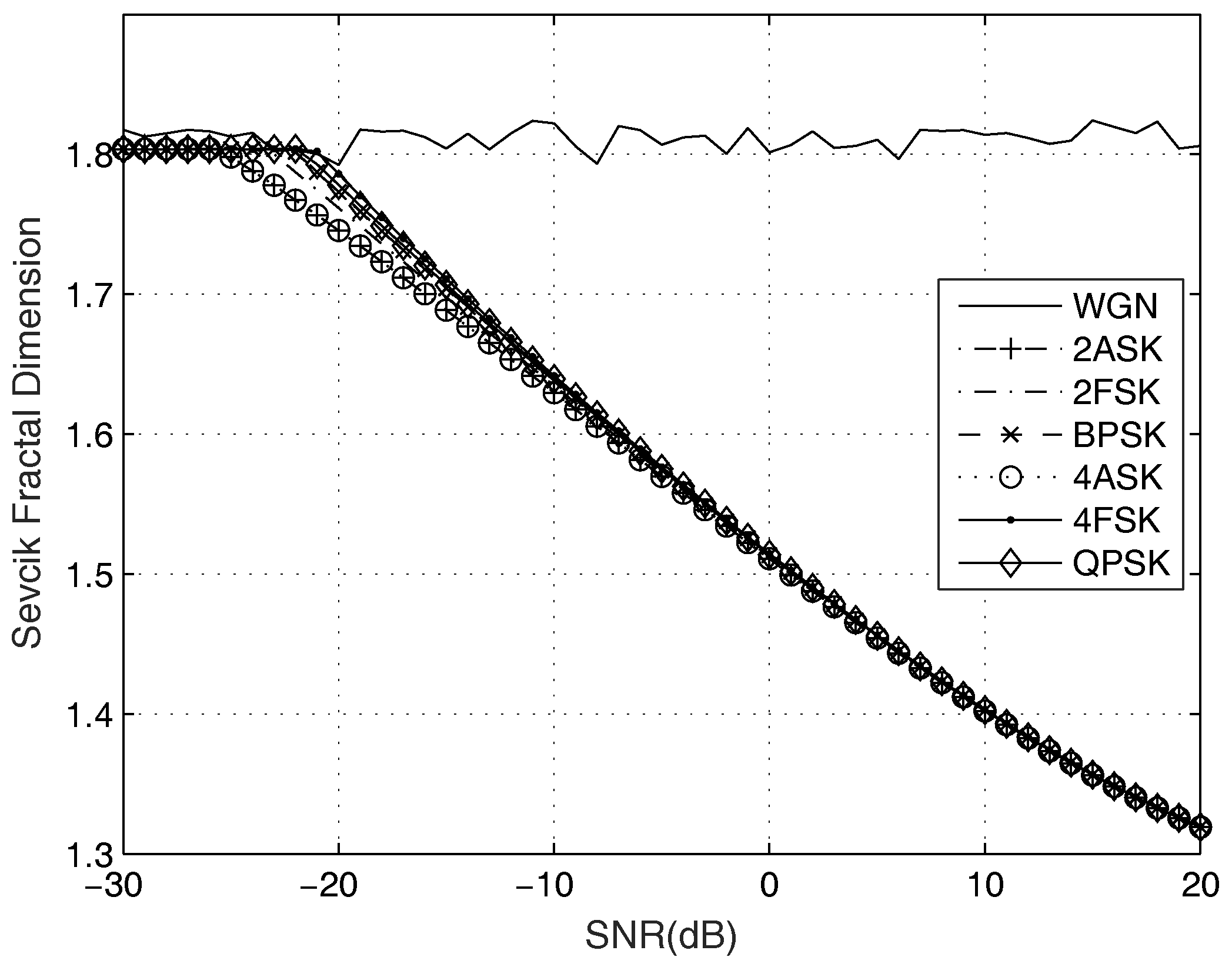
Figure 2.
The relationship between noise power and the noise Sevcik fractal dimension.
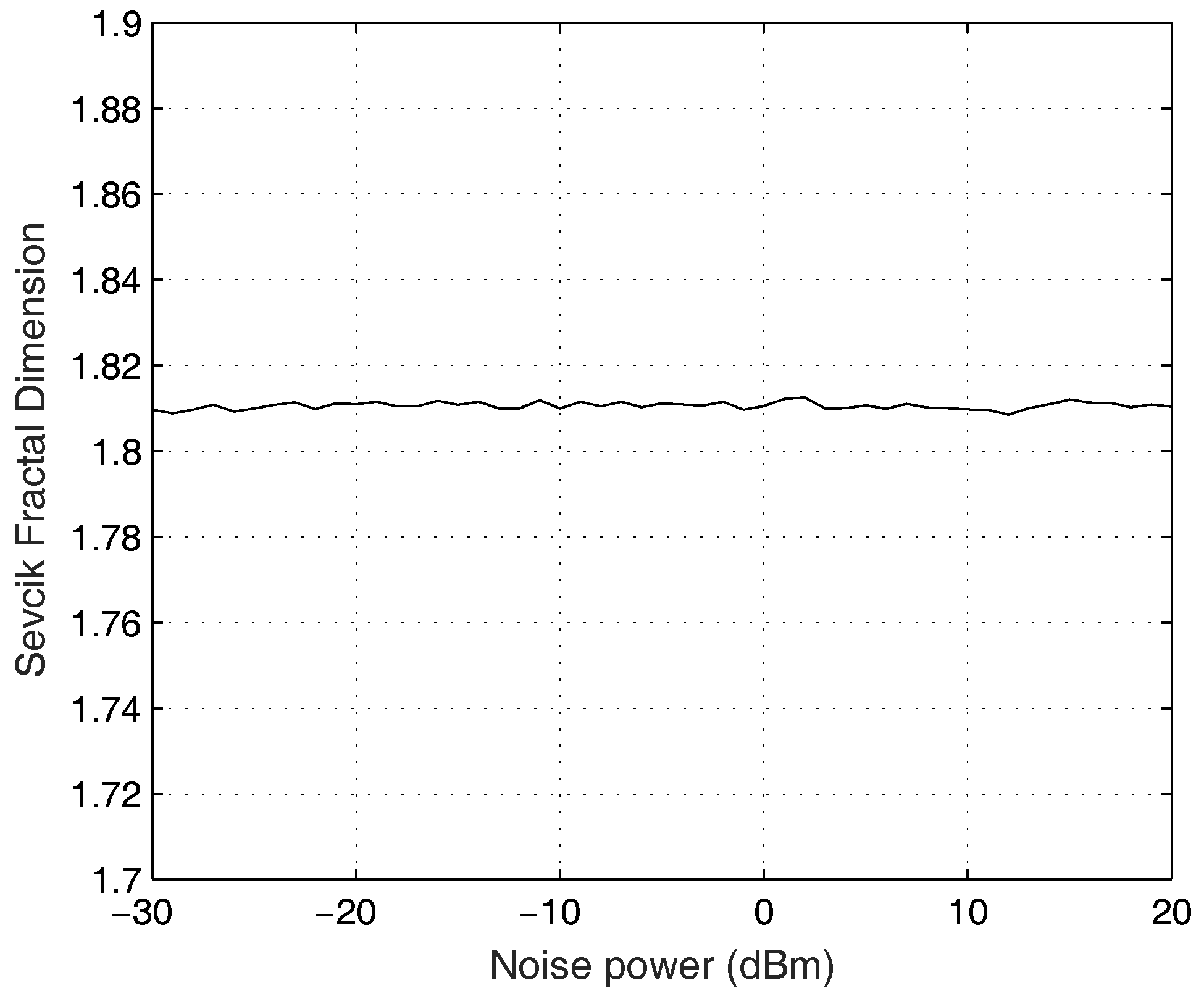
Figure 3.
The block diagram of spectrum sensing system based on Sevcik fractal dimension (SFD) in the frequency domain. DFT: discrete Fourier transform.
Figure 3.
The block diagram of spectrum sensing system based on Sevcik fractal dimension (SFD) in the frequency domain. DFT: discrete Fourier transform.

Figure 4.
Double-threshold decision.
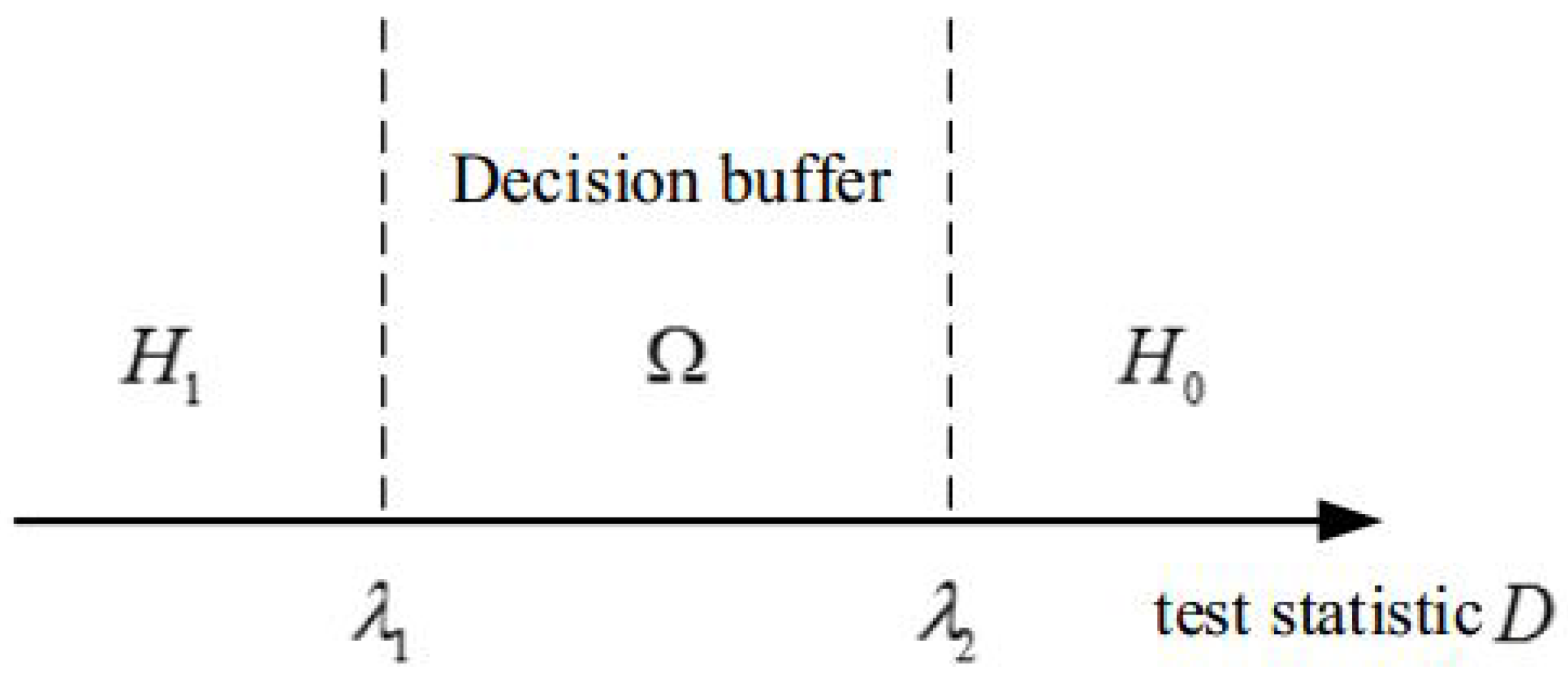
Figure 5.
Detection probability comparison of the proposed method with the other three methods. SNR: signal-to-noise ratio.
Figure 5.
Detection probability comparison of the proposed method with the other three methods. SNR: signal-to-noise ratio.
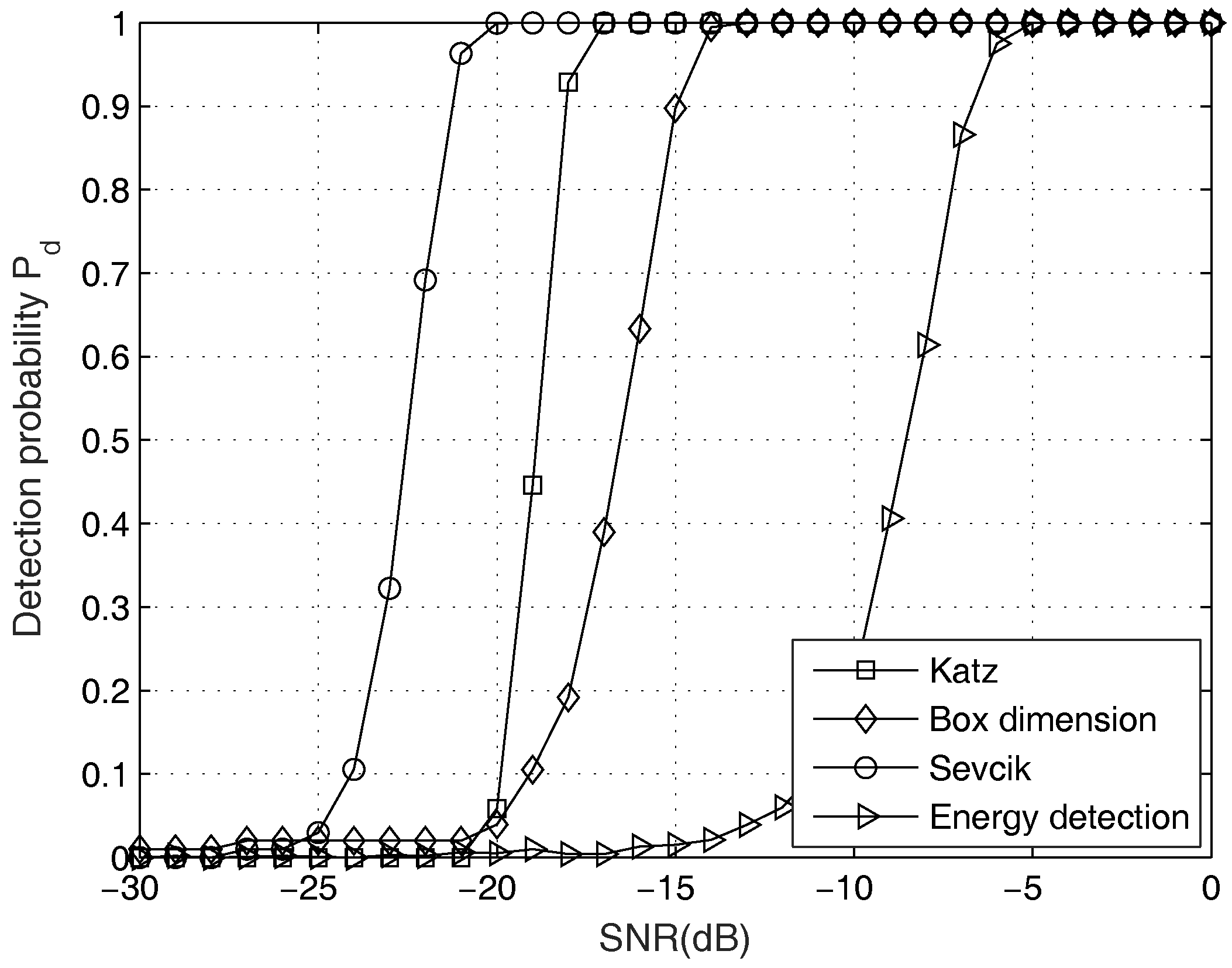
Figure 6.
Detection probability comparison of different numbers of secondary users (SUs).
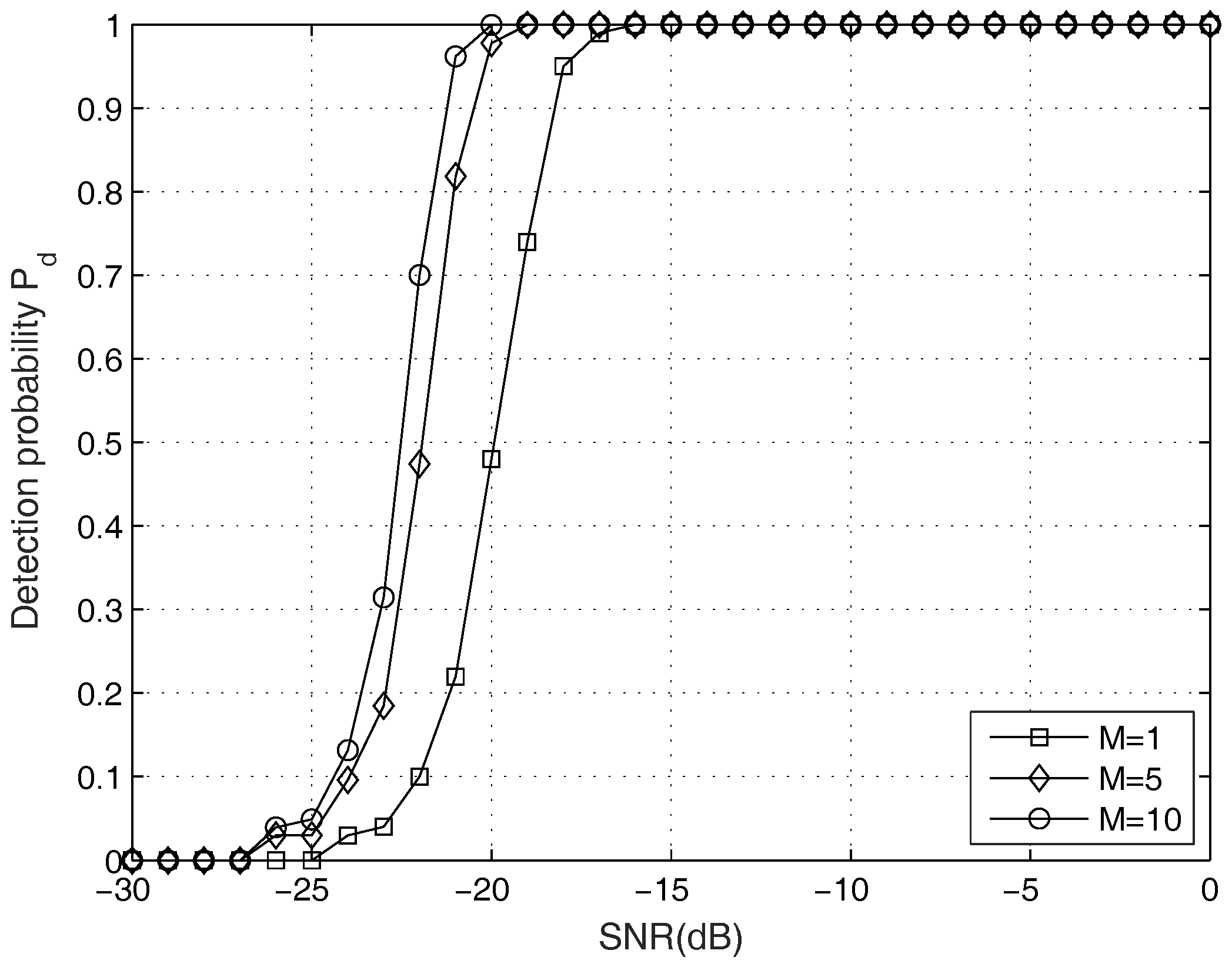
Figure 7.
Detection performance comparison of the proposed algorithm with the single threshold detection.
Figure 7.
Detection performance comparison of the proposed algorithm with the single threshold detection.
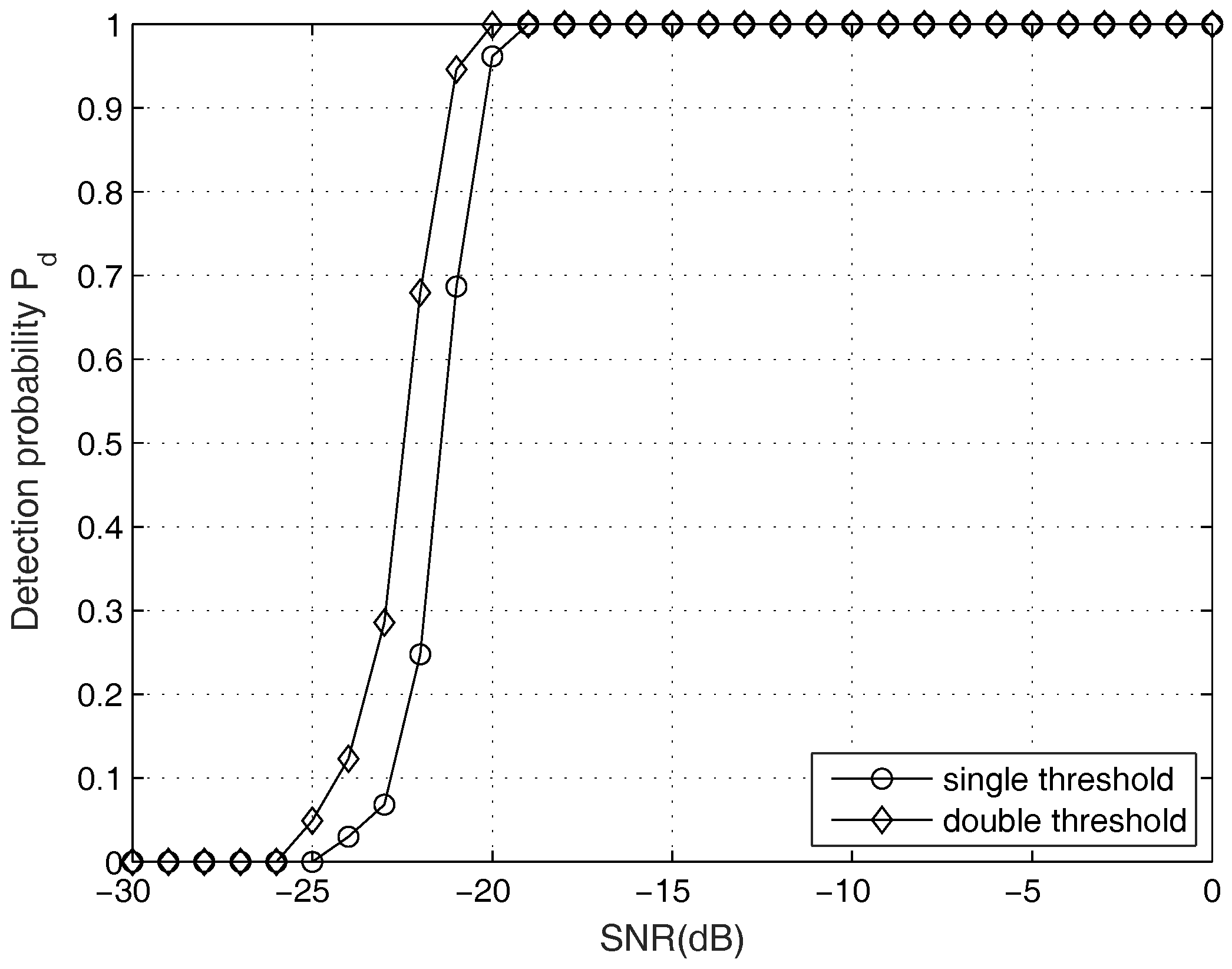
Figure 8.
The influence of noise uncertainty on detection probability.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
The values of the threshold and the correction in different schemes.
| Fractal Dimension Schemes | Threshold 1 | Threshold 2 | Correction |
|---|---|---|---|
| Sevcik | |||
| Katz | |||
| Box dimension |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Diao, X.; Dong, Q.; Yang, Z.; Li, Y. Double-Threshold Cooperative Spectrum Sensing Algorithm Based on Sevcik Fractal Dimension. Algorithms 2017, 10, 96. https://doi.org/10.3390/a10030096
AMA Style
Diao X, Dong Q, Yang Z, Li Y. Double-Threshold Cooperative Spectrum Sensing Algorithm Based on Sevcik Fractal Dimension. Algorithms. 2017; 10(3):96. https://doi.org/10.3390/a10030096
Chicago/Turabian StyleDiao, Xueying, Qianhui Dong, Zijian Yang, and Yibing Li. 2017. "Double-Threshold Cooperative Spectrum Sensing Algorithm Based on Sevcik Fractal Dimension" Algorithms 10, no. 3: 96. https://doi.org/10.3390/a10030096
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.