Robust Fuzzy Adaptive Sliding Mode Stabilization for Fractional-Order Chaos


1
Department of Electrical Engineering, Sétif 1 University, Sétif 19000, Algeria
2
Department of Electronics, Electrotechnics and Automatics (EEA), Office 447, BP 75 A, National Polytechnic School of Constantine, Nouvelle ville Ali Mendjli, Constantine 25100, Algeria
3
Laboratory of Signal Processing (SP-Lab), Department of Electronics, University of Mentouri Brothers Constantine 1, Route de Ain Elbey, Constantine 25000, Algeria
*
Author to whom correspondence should be addressed.
Algorithms 2018, 11(7), 101; https://doi.org/10.3390/a11070101
Submission received: 1 June 2018
/
Revised: 3 July 2018
/
Accepted: 5 July 2018
/
Published: 7 July 2018
(This article belongs to the Special Issue Fractional Order Systems and Signals: Modelling, Identification and Control Applications)
Abstract
:In this paper, a new adaptive fuzzy sliding mode control (AFSMC) design strategy is proposed for the control of a special class of three-dimensional fractional order chaotic systems with uncertainties and external disturbance. The design methodology is developed in two stages: first, an adaptive sliding mode control law is proposed for the class of fractional order chaotic systems without uncertainties, and then a fuzzy logic system is used to estimate the control compensation effort to be added in the case of uncertainties on the system’s model. Based on the Lyapunov theory, the stability analysis of both control laws is provided with elimination of the chattering action in the control signal. The developed control scheme is simple to implement and the overall control scheme guarantees the global asymptotic stability in the Lyapunov sense if all the involved signals are uniformly bounded. In the present work, simulation studies on fractional-order Chen chaotic systems are carried out to show the efficiency of the proposed fractional adaptive controllers.
1. Introduction
It is undeniable that fractional-calculus (computation of derivatives and integrals of any arbitrary real or complex order) and its applications focused much interest in the last three decades [1]. This growing popularity and importance is mainly due to its demonstrated applications in numerous seemingly diverse fields of science and engineering [2,3,4].
A great number of researchers focused their studies on fractional order systems presenting chaotic dynamics [5,6,7]. Recently, a class of fractional order piece-wise continuous systems was able to produce chaotic behavior with hidden attractors [8,9]. Many control strategies have been proposed in the related literature for the stabilization and synchronization of chaos in nonlinear fractional-order systems such as fractional-order linear controllers [10], fractional-order PID control [11], adaptive control [12], adaptive H control [13], fuzzy adaptive control [14], and adaptive backstepping control [15].
Recently, sliding-mode control (SMC) has gained much attention for the control and synchronization of fractional-order chaotic systems [16,17,18]. This is mainly due to its robustness against parameter variations and external disturbances under matching conditions [19,20]. In fact, robustness of a control system is very important because various uncertainties exist in practical applications; furthermore, noises in general are ubiquitous in natural and synthetic systems [21]. Based on the Lyapunov theory of stability, SMC is advantageous for this consideration, because it can switch the control law very fast to drive the states of the system from any initial states into a specified sliding surface, and to maintain the states on the surface for all subsequent time [22]. It is worth noticing that fuzzy sets have been extensively associated with SMC to deal with uncertainties and disturbing functions in both classical and fractional-order contexts [14,23,24].
In this paper, a novel fuzzy adaptive sliding mode controller is introduced to stabilize a class of fractional-order chaotic systems. The control law is developed in two stages: First we consider the ideal case (free from uncertainties and disturbances) for which a sliding surface and a SMC control law is proposed that guaranties the stability of the system in the sense of Lyapunov theory. In the second stage, the control problem of this class of fractional-order nonlinear systems in presence of uncertainties and external disturbances is studied. A fuzzy adaptive SMC control law is proposed to stabilize asymptotically the closed-loop system. In addition, simulation results on fractional-order Chen system show that the recurrent SMC problem of chattering phenomena is eliminated by the proposed control law.
In this design procedure, both the uncertainties in the fractional-order system model and the external disturbance signal are represented by the Takagi–Sugeno (TS) fuzzy-neural-network (FNN) model.
The rest of the paper is organized as follows. Section 2 presents some basic definitions of fractional calculus and the general fractional-order chaotic systems. Section 3 presents an introduction to fuzzy systems theory. In Section 4, a fractional order sliding mode controller design is proposed for a class of three-dimensional fractional-order chaotic systems with numerical application results to the fractional chaotic Chen system. Section 5 investigates adaptive sliding mode control design for chaotic systems with uncertainties and external disturbances using fuzzy sets. The stability analysis is performed using Lyapunov theorem and the simulation example for the control of fractional Chens system is clearly presented to show the viability and efficiency of the proposed fractional adaptive controllers. Finally, the paper is concluded in Section 6.
2. Preliminaries
Fractional calculus has three centuries of mathematical history. Over the past three centuries, this subject was the exclusive domain of mathematicians; only in the past few years, has fractional calculus been implemented in several fields of engineering science [25].
2.1. Basic Definitions
There are many mathematic definitions for fractional integration and derivation. We here present two current used ones.
2.1.1. Riemann–Liouville (R-L) Definition
It is one of the most popular definitions of the fractional order integrals and derivative [26].
The R-L integral of fractional order , () is given as,
and the R-L derivative of fractional order is:
where the integer n verifies: . Definition (2) can be represented as:
2.1.2. Grünwald–Leitnikov (G-L) Definition
The G-L integral is given by
Here, the coefficients verify and belong to the following polynomial,
The G-L derivative is:
where
and . Two general properties of the fractional-order derivative are used:
Property 1.
The additive index law
Property 2.
Caputo fractional derivative operator is a linear operator
(a, b are real constants).
2.2. Implementation of Fractional Operator
Generally, industrial control processes are sampled, so a numerical approximation of the applied fractional operator is indispensable. There exists several approximation approaches; some are temporal, while others are in frequency domain. In the literature, one of the current used approaches in frequency domain is the one of Charef [27,28]. In temporal domain, there is a lot of work about the numerical solution of the fractional differentials equations. Diethelm has proposed an efficient method based on the predictor–corrector Adams Algorithm [29]. Definitions cited above also have numerical approximations:
Grünwald–Leitnikov (G-L) Approximation
For numerical computation of fractional order integrals and derivatives, we may use the Grünwald–Letnikov (G-L) definitions and Equations (5) and (6), respectively. Thus, for a causal function , and for where h is a fixed sampling time period, the fractional order derivative is given as follows [26]:
where the coefficients are computed by using the following recursive formula:
For :
and
2.3. General Fractional-Order Chaotic System Description
In this work, we consider the class of three-dimensional fractional-order chaotic systems given by the following equations [16]:
where are fractional orders satisfying ; and x, y and z are state variables. Each of the four functions , , and is considered as a continuation of nonlinear vector functions belonging to space. are known constants, for any negative or positive values.
Remark 1.
Remark 2.
Fractional Order Chen System
The fractional order version of Chen system is a particular case of class of three-dimensional fractional-order chaotic systems (Equation (11)), with
It becomes then [31],
where , and are state variables and are fractional orders.
3. Introduction to Fuzzy Systems
A fuzzy control system (FLS) involves the control of a process using fuzzy linguistic descriptions. It has the advantage of easy development, implementation and maintenance of control systems [32]. It consists of four parts: the knowledge base, the fuzzifier, the fuzzy inference engine working on fuzzy rules, and the defuzzifier. The knowledge base for FLS is comprised of a collection of fuzzy If–then rules of the following form:
where and y are the FLS input and output, respectively. Fuzzy sets and are associated with the fuzzy functions and , respectively. N is the number of rules. Through singleton function, center average defuzzification, and product inference [33], the fuzzy logic system can be expressed as:
where is a vector of the adjustable factors of the consequence part of the fuzzy rule and is a regressive vector with the regressor (fuzzy basis functions) defined as (see [34]),
4. Sliding Mode Control Design for the General Fractional-Order Chaotic System
4.1. Sliding Mode Control Law
The control input is added to the second state equation to control the fractional-order chaotic system in Equation (11). The resulting class of fractional-order model can be expressed as [25]:
To obtain the sliding mode control law, let us define the sliding surface as [35]:
where is a function described by
For the sliding mode technique, the sliding surface and its derivative must satisfy
and
According to the sliding mode theory and using Equations (16) and (20), the equivalent control law is derived as
To design the reaching mode control scheme, which drives states onto the sliding surface, a reaching law can be chosen as
where
and the is the reach gain of the controller, .
Finally, the total control law can be defined as
We can then establish the following result,
Theorem 1.
Proof.
The Lyapunov candidate function is selected as:
Thus, the closed loop system is globally asymptotically stable via the sliding mode control. ☐
Remark 3.
The same form as Equation (17) is used for the sliding surface than in [35], however the proposed function defined in Equation (18) is augmented by the presence of the function, leading to the different (and novel) control law in Equation (21). The coefficients and verifying and , have been introduced in the sliding mode control law in Equation (21) as tuning parameters, allowing the control of the states convergence speed.
Remark 4.
From Table 1 representing different fractional order systems included in the considered class of fractional order chaotic systems, it is obvious that the control law in Equation (21) can be easily and successfully applied to all these systems, confirming former studies on the similarities of Lorenz, Lu and Chen systems (e.g., [35,36]).
4.2. Application to Fractional-Order Chen System
In this section, we present an illustrative example to verify and demonstrate the effectiveness of the proposed control scheme.
The control input to stabilize Chen system is added to the third state equation to control chaos in the fractional order system in Equation (13). The proposed class of fractional order model in Equation (16) can be described as follows:
Using the sliding mode control law in Equation (24), we derive the following control action with and to stabilize the fractional-order Chen system,
5. Fuzzy Adaptive Sliding Mode Control of Uncertain Perturbed Fractional Order Chaotic System
Let us consider the fractional-order chaotic system in Equation (16) with uncertainties in the presence of an external disturbance. It will be illustrated that the system can be stabilized under the sliding mode and fuzzy adaptive control.
where denotes an uncertainty and denotes an external disturbance against the performance of the system, which are bounded by some positive constants.
We introduce the augmented adaptive control action given by:
where is the control law of the ideal case in Equation (24), and is an additive adaptive fuzzy control law defined as,
with
where is a positive scalar value.
The control signal is employed to attenuate the error and external disturbance . This leads us to the main result given as follows.
Theorem 2.
Proof.
The Lyapunov candidate function is selected as:
where and is the optimal parameter vectors. The time derivative of the Lyapunov function is given by
where and . Thus, we get,
where the uncertainty and disturbance term is defined as,
Fuzzy logic systems are known as universal approximations, i.e., they are able to approximate a smooth function on a compact space [34]. Thus, we can obtain such that:
and then the following result is obtained,
☐
Application to the Uncertain and Disturbed Fractional-Order Chen System
To illustrate the performance of the proposed robust adaptive control approach, we consider the fractional-order chaotic Chen system in Equation (28), subject to model uncertainties and additional disturbances.
The fractional uncertain perturbed version of Chen system is given by:
We use the same parameter values of the fractional-order Chen system given in Section 4.2. The uncertainty term applied to the system is given by,
and the external disturbances are defined as:
We define five fuzzy membership functions for each error and derivative of error , , given as
For the given application, the adaptive gain is set to . The simulation results are given in Figure 6, Figure 7, Figure 8, Figure 9 and Figure 10.
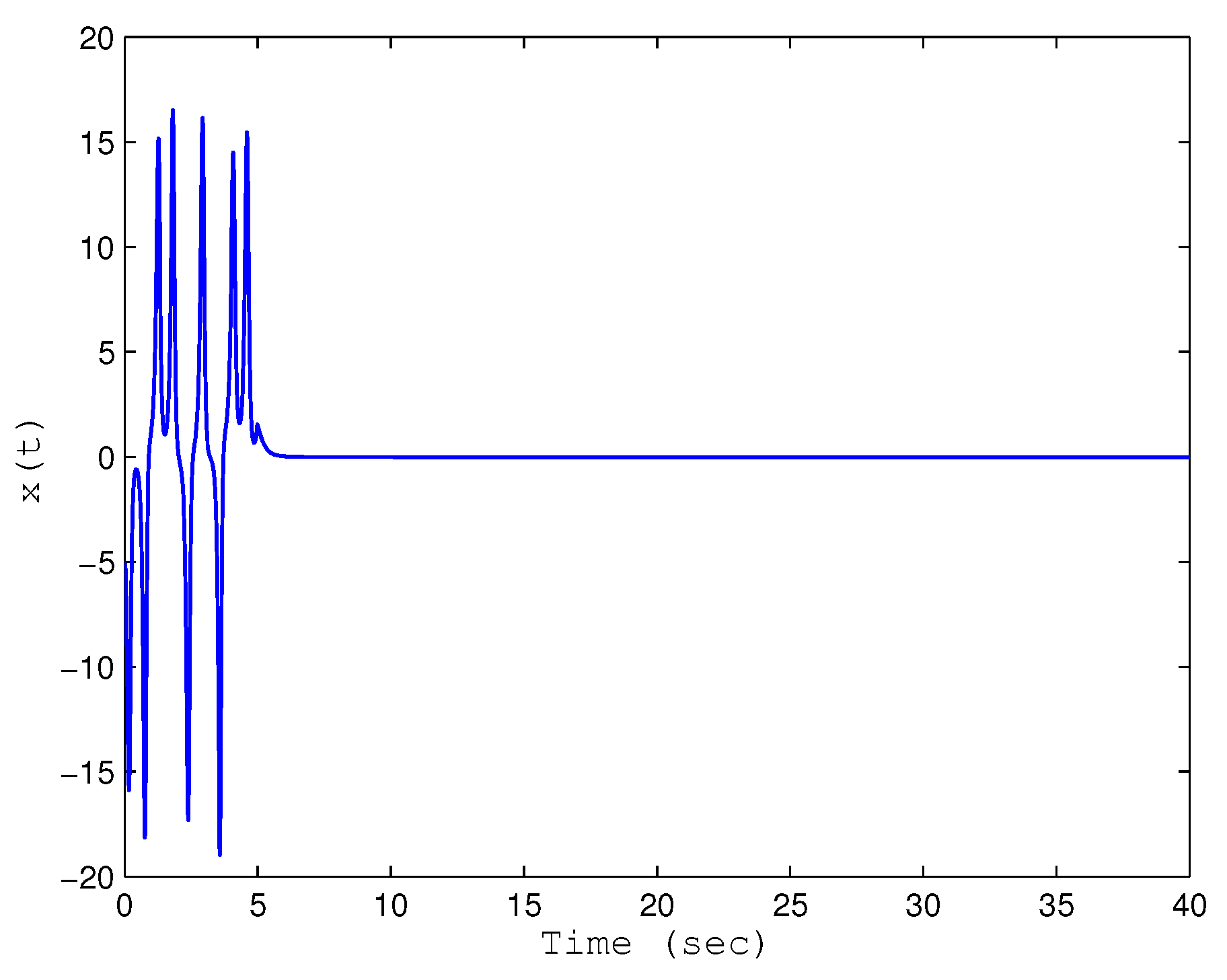
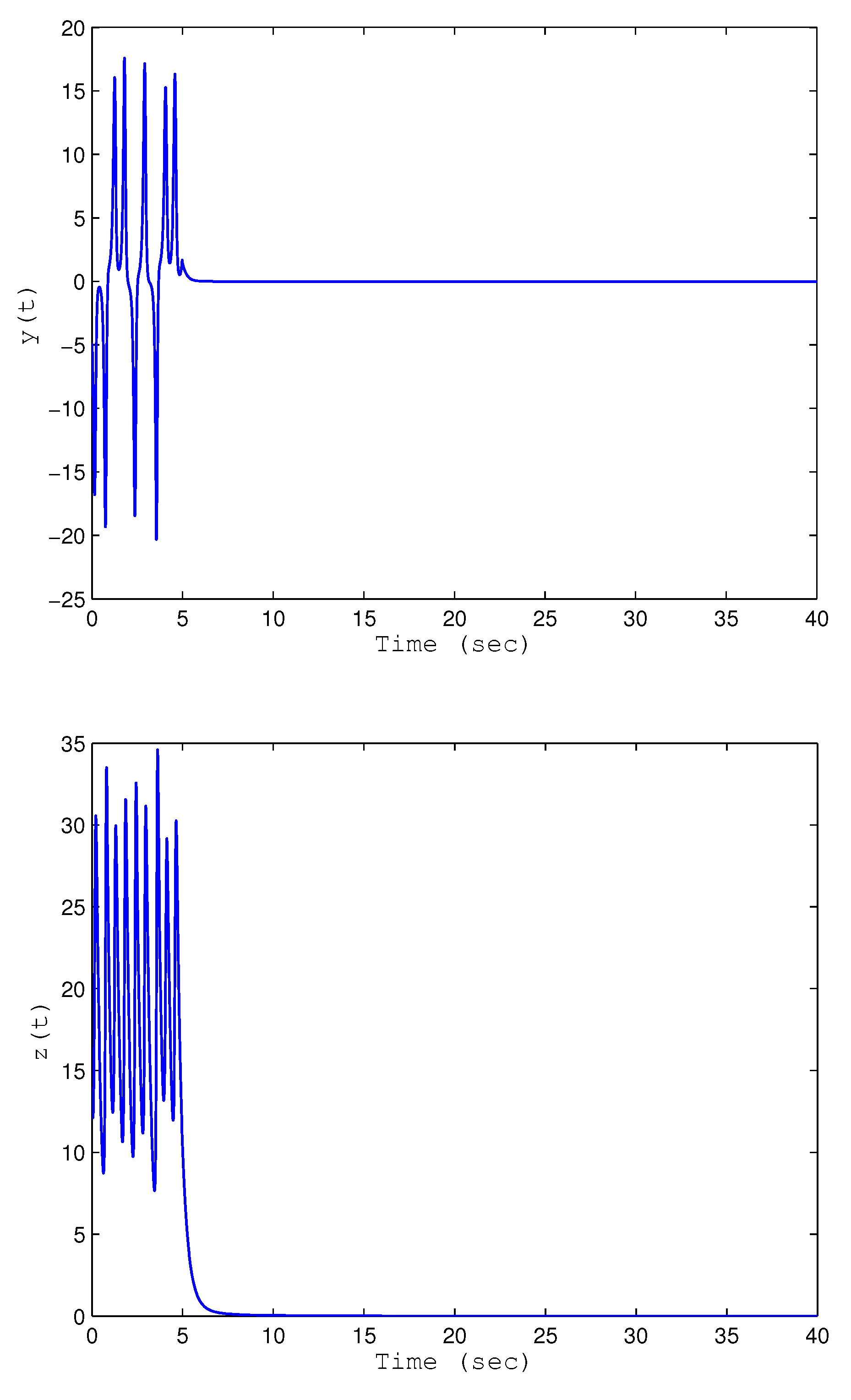
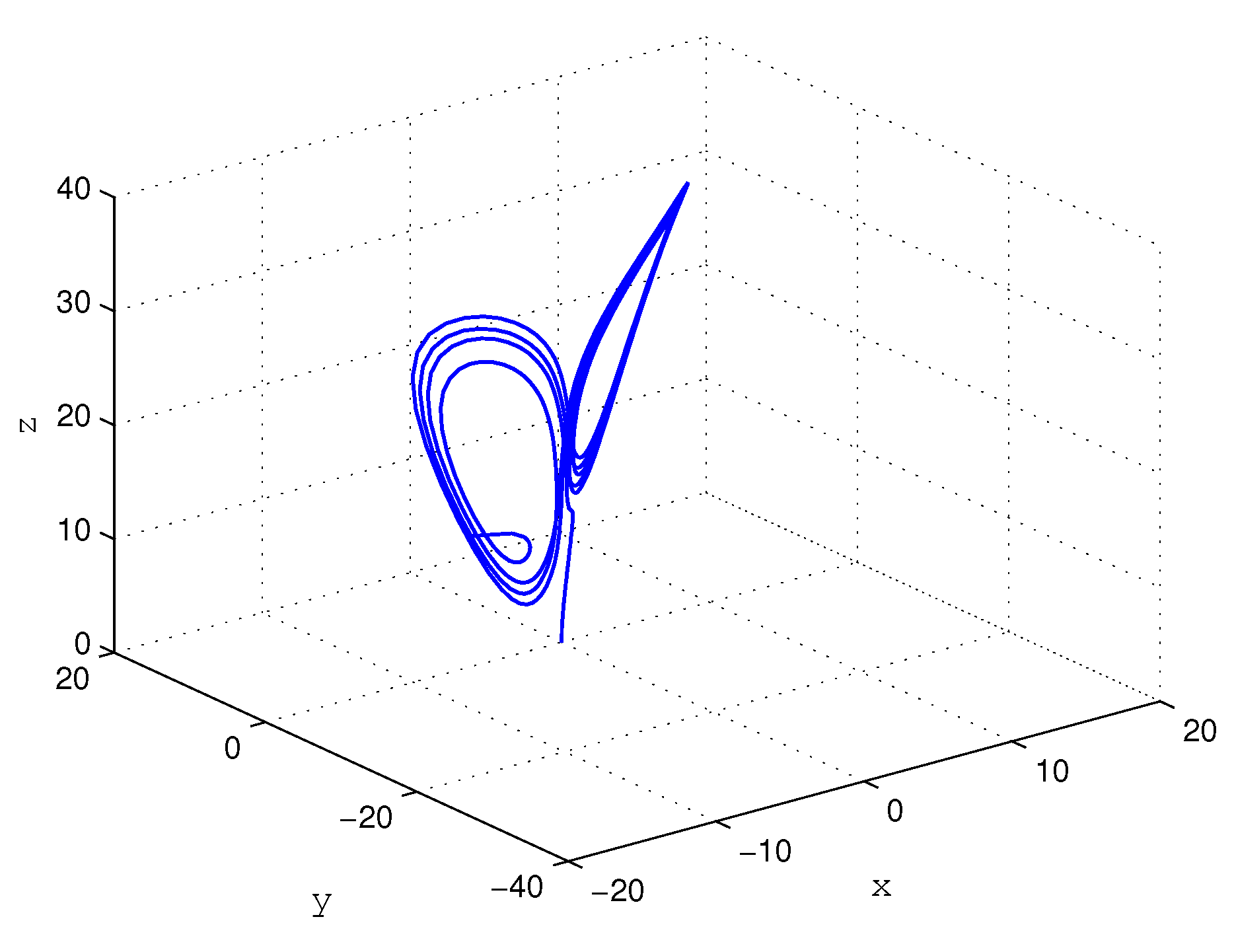
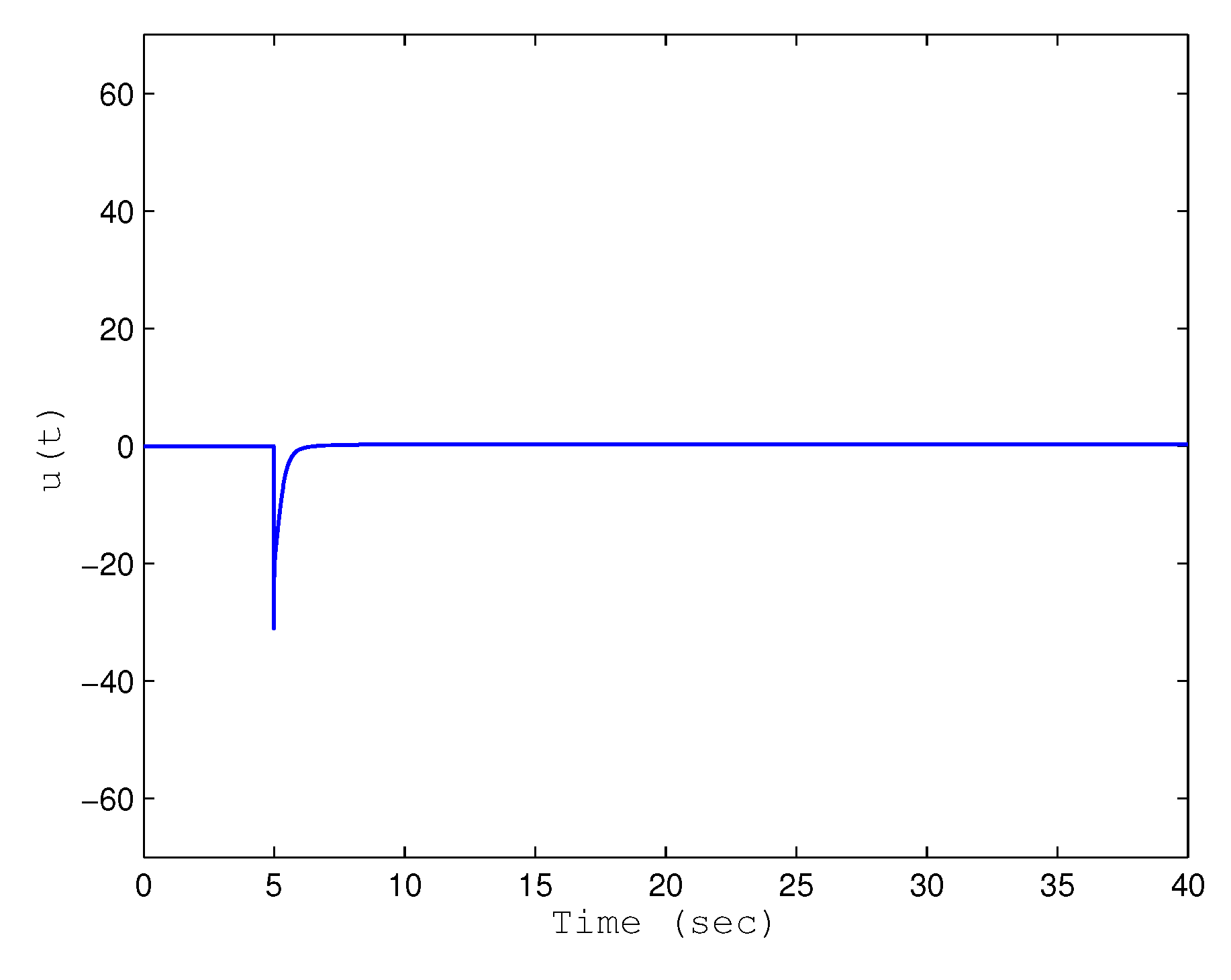
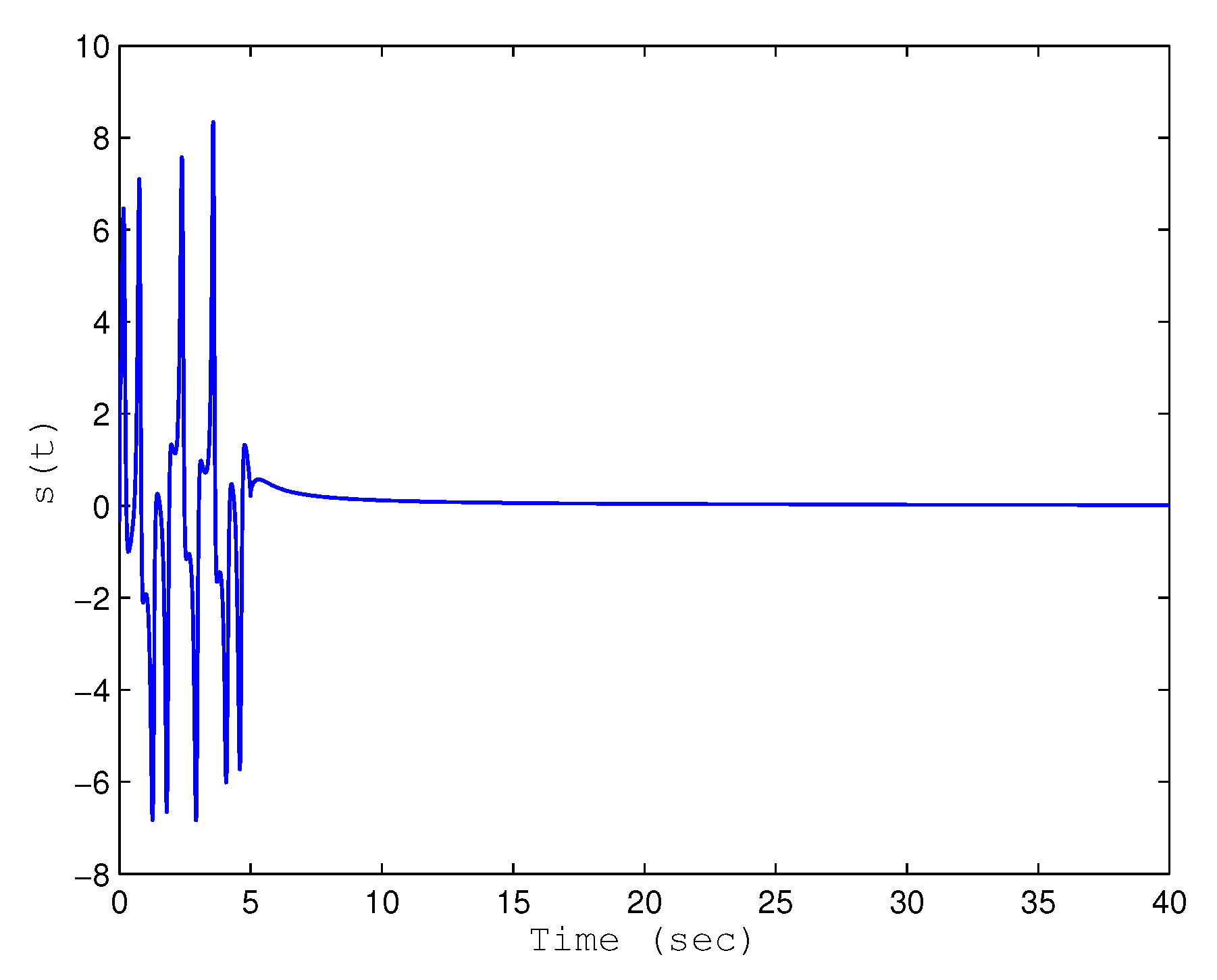
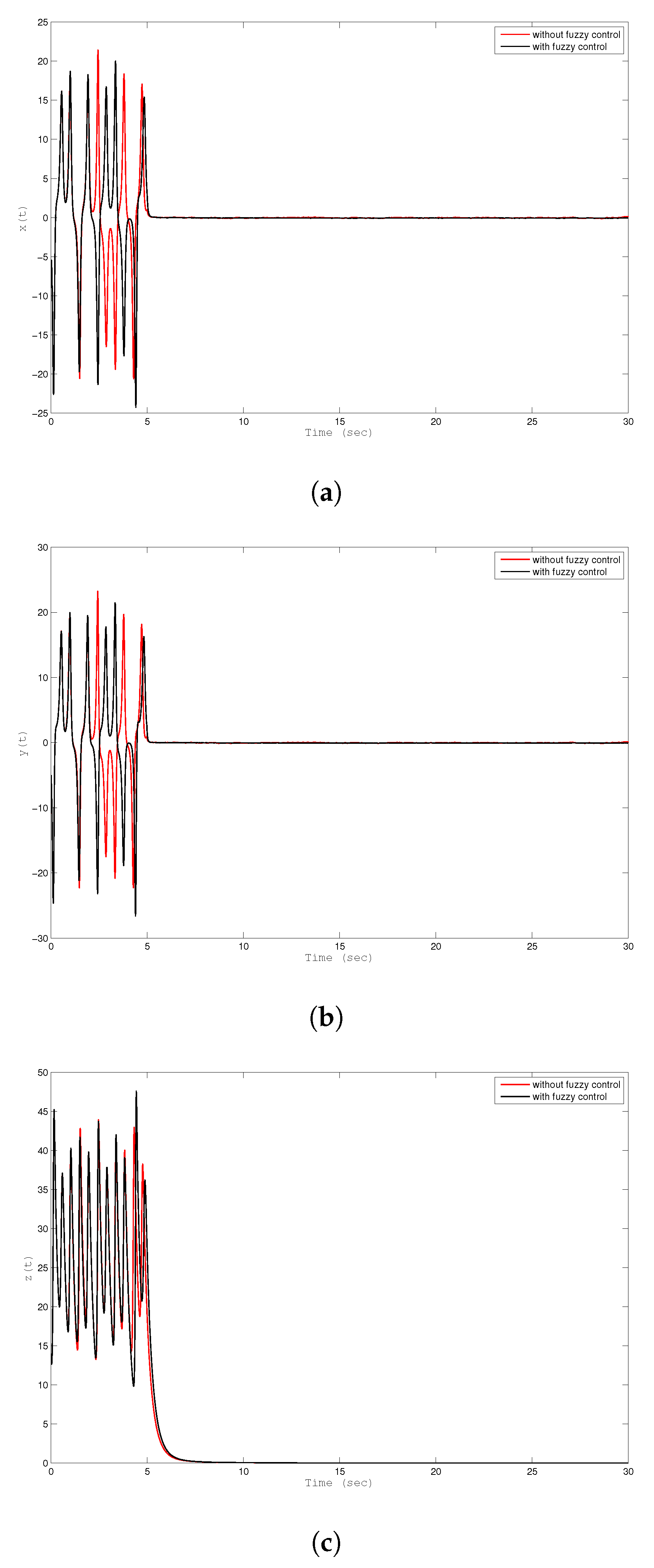
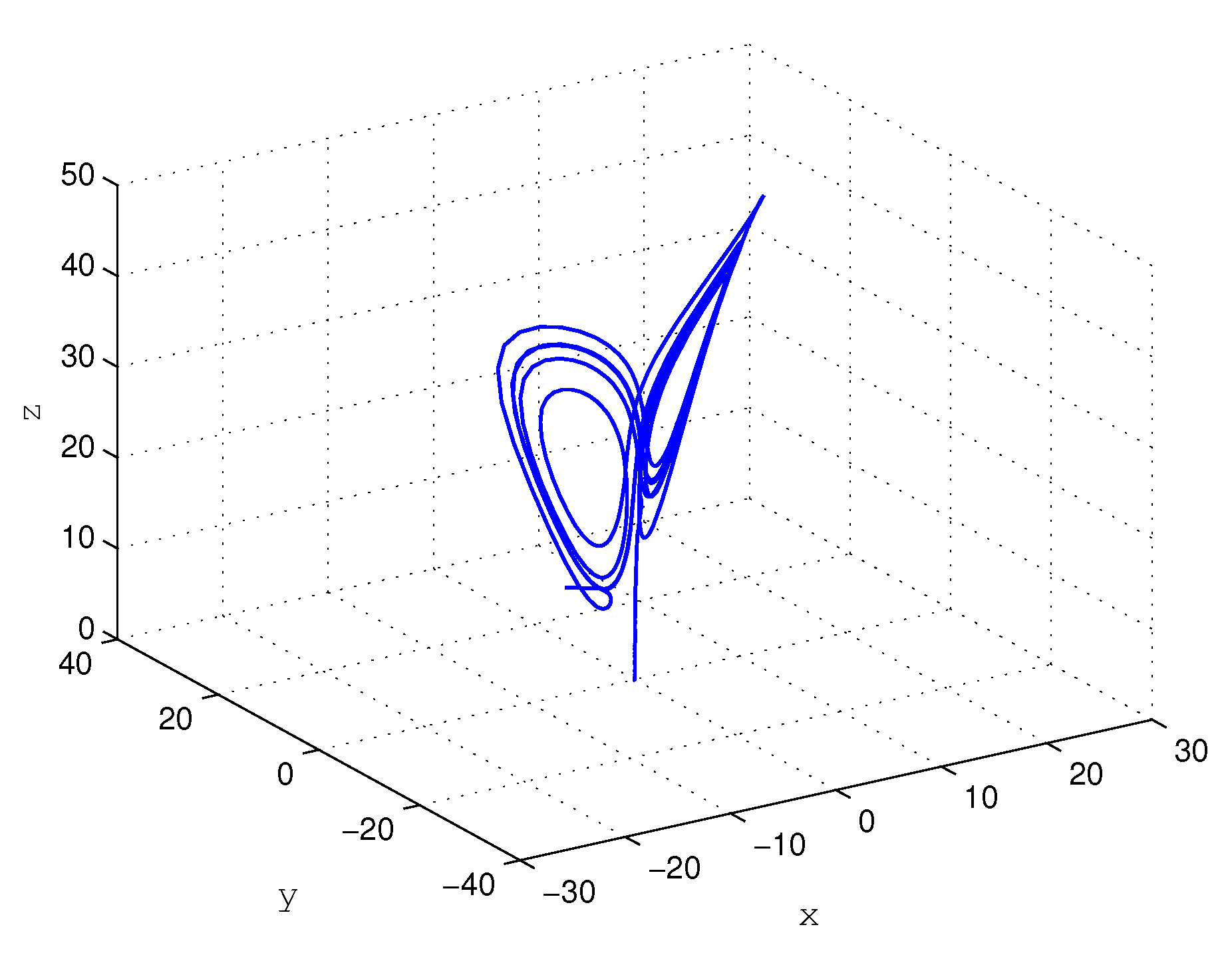
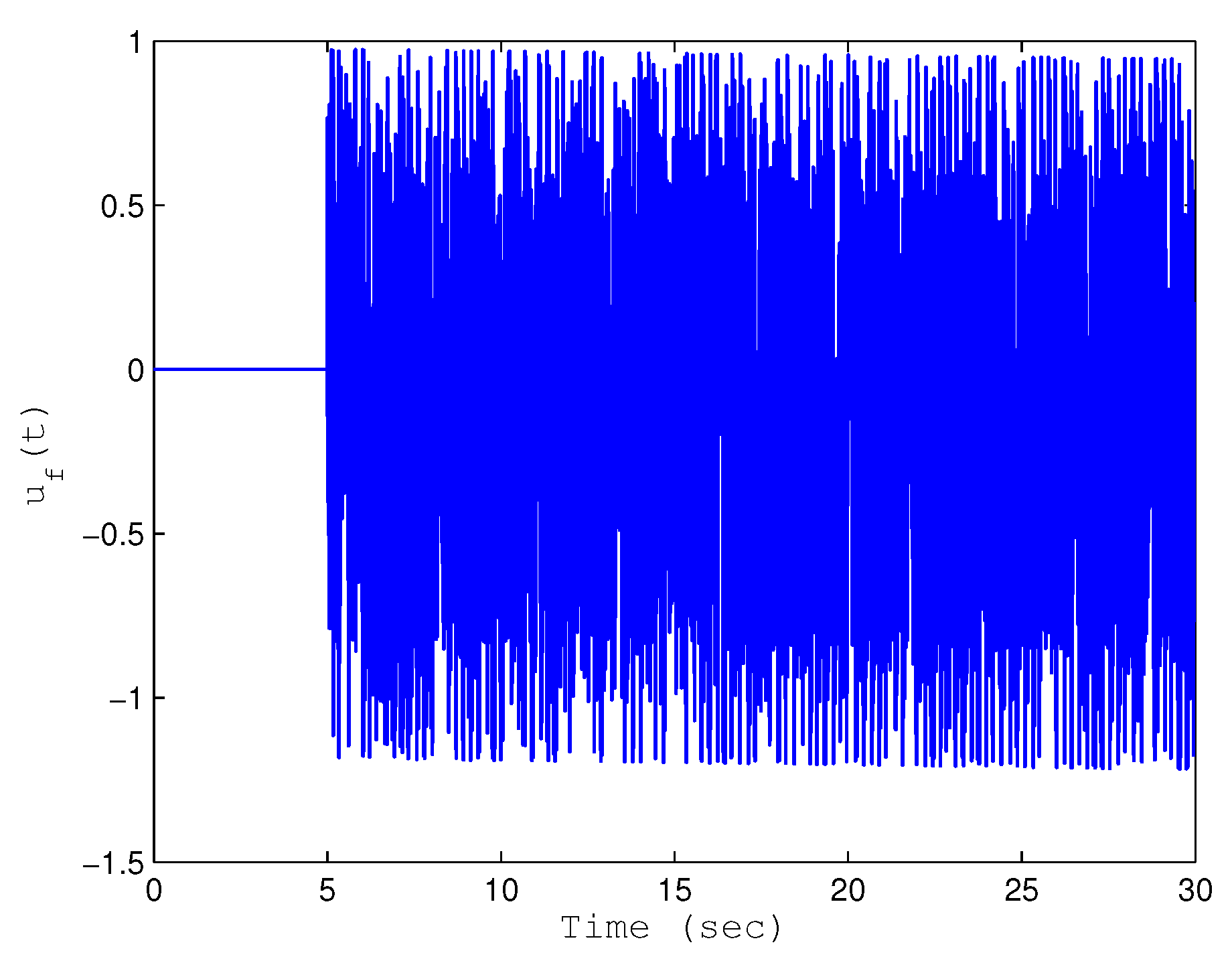
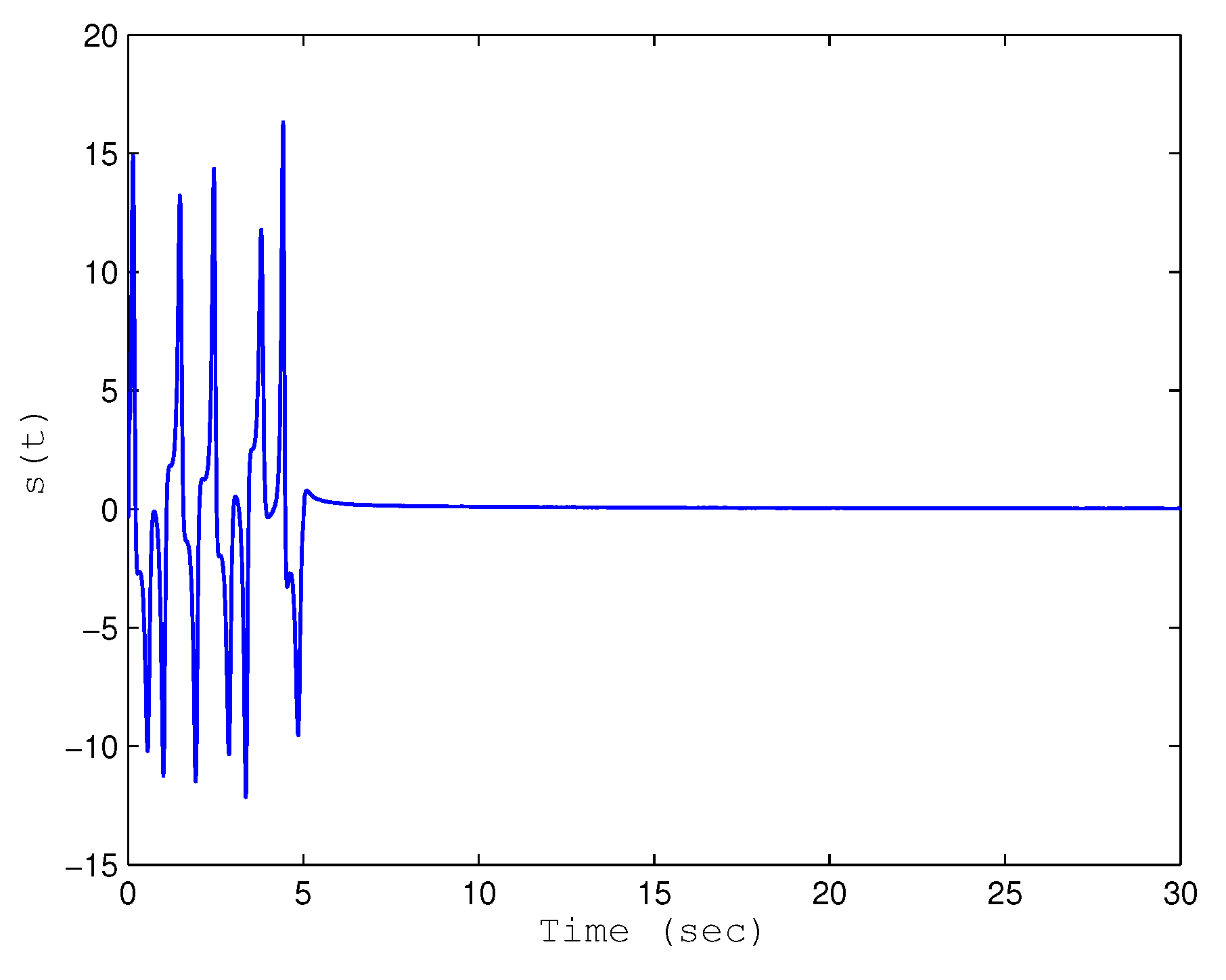
To show the robustness of the proposed AFSMC, the control effort is activated at t = 5 s. Figure 6 shows the state trajectories and z of stabilized uncertain fractional-order Chen system. Figure 7 presents a phase portrait of the uncertain chaotic system under the control action. We can see that a fast convergence to 0 is achieved as the control effort is activated. The global control-effort trajectory is shown in Figure 9, and trajectory of the sliding surface is shown in Figure 10.
We remark that the performance of the designed controller is satisfactory and the robustness of the designed fuzzy adaptive controller is also verified and approved. Even the disturbance magnitude in this numerical study is widely increased when compared with similar control designs in the literature, we cite for instance the work presented in [35] with and [22] with . This illustrates the superiority of the proposed control design to reject additive disturbances.
6. Conclusions
In this paper, a new adaptive sliding mode control law has been designed according to the Lyapunov stability theorem, to control a class of fractional-order chaotic systems. Based on the fuzzy sets theory, an additive adaptive control law is introduced to compensate the uncertainties and disturbances. Stability analysis of the robust adaptive controller is performed. Finally, a numerical example on the sub-class of fractional-order Chen system has been included to demonstrate the effectiveness of the proposed control scheme.
Author Contributions
B.B. and S.L. contributed the initial ideas; B.B. conceived and designed the simulations model; B.B. and S.L. analyzed the data; and S.L. wrote the paper.
Funding
This research was funded by the Ministry of Higher Education and Scientific Research, Algeria (CNEPRU No. A10N01UN210120150002).
Acknowledgments
The authors would like to thank Manuel Duarte-Mermoud and Rafael Castro-Linares for their kind invitation to contribute to this Special Issue. They are also very thankful to Mohamed Lashab for his useful comments on the paper presentation.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ladaci, S.; Bensafia, Y. Indirect fractional order pole assignment based adaptive control. Eng. Sci. Technol. Int. J. 2016, 19, 518–530. [Google Scholar] [CrossRef]
- Ladaci, S.; Loiseau, J.J.; Charef, A. Adaptive internal model control with fractional order parameter. Int. J. Adapt. Control Signal Process. 2010, 24, 944–960. [Google Scholar] [CrossRef]
- Neçaibia, A.; Ladaci, S.; Charef, A.; Loiseau, J.J. Fractional order extremum seeking approach for maximum power point tracking of photovoltaic panels. Front. Energy 2015, 9, 43–53. [Google Scholar] [CrossRef] [Green Version]
- Bourouba, B.; Ladaci, S. Comparative performance analysis of AG, PSO, CA and ABC algorithm’s for fractional pid controller. In Proceedings of the International Conference on Modelling, Identification and Control (ICMIC 2016), Algiers, Algeria, 15–17 November 2016; Volume 8, pp. 960–965. [Google Scholar]
- Tsai, J.S.; Chien, T.H.; Guo, S.M.; Chang, Y.P.; Shieh, L.S. State-space self-tuning control for stochastic fractional-order chaotic systems. IEEE Trans. Circuits Syst. 2007, 54, 632–642. [Google Scholar] [CrossRef]
- Yang, L.; Jiang, J. Complex dynamical behavior and modified projective synchronization in fractional-order hyper-chaotic complex Lü system. Chaos Solitons Fractals 2015, 78, 267–276. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, H.; Li, Y.; Pei, B. Image encryption based on synchronization of fractional chaotic systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 3735–3744. [Google Scholar] [CrossRef]
- Danca, M.F.; Feckan, M.; Kuznetsov, N.V.; Chen, G. Complex dynamics, hidden attractors and continuous approximation of a fractional-order hyperchaotic PWC system. Nonlinear Dyn. 2018, 91, 2523–2540. [Google Scholar] [CrossRef]
- Danca, M.F.; Feckan, M.; Kuznetsov, N.V.; Chen, G. Fractional-order PWC systems without zero Lyapunov exponents. Nonlinear Dyn. 2018, 92, 1061–1078. [Google Scholar] [CrossRef]
- Tavazoei, M.S.; Haeri, M. Stabilization of unstable fixed points of fractional-order systems by fractional-order linear controllers and its applications in suppression of chaotic oscillations. J. Dyn. Syst. Meas. Control 2010, 132, 021008. [Google Scholar] [CrossRef]
- Rabah, K.; Ladaci, S.; Lashab, M. Bifurcation-based fractional-order piλdμ controller design approach for nonlinear chaotic systems. Front. Inf. Technol. Electron. Eng. 2017. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Delgado-Aguilera, E. Adaptive synchronization of fractional lorenz systems using a reduced number of control signals and parameters. Chaos Solitons Fractals 2016, 87, 1–11. [Google Scholar] [CrossRef]
- Lin, T.C.; Kuo, C.H. H∞ synchronization of uncertain fractional order chaotic systems: Adaptive fuzzy approach. ISA Trans. 2011, 50, 548–556. [Google Scholar] [CrossRef] [PubMed]
- Khettab, K.; Ladaci, S.; Bensafia, Y. Fuzzy adaptive control of fractional order chaotic systems with unknown control gain sign using a fractional order nussbaum gain. IEEE/CAA J. Autom. Sin. 2017, 1–8. [Google Scholar] [CrossRef]
- Shukla, M.K.; Sharma, B.B. Stabilization of a class of uncertain fractional order chaotic systems via adaptive backstepping control. In Proceedings of the Indian Control Conference (ICC), Guwahati, India, 4–6 January 2017; Volume 17, pp. 462–467. [Google Scholar]
- Chen, D.; Liu, Y.; Ma, X.; Zhang, R. Control of a class of fractional-order chaotic systems via sliding mode. Nonlinear Dyn. 2012, 67, 893–901. [Google Scholar] [CrossRef]
- Lin, T.C.; Lee, T.Y. Chaos synchronization of uncertain fractional-order chaotic systems with time delay based on adaptive fuzzy sliding mode control. IEEE Trans. Fuzzy Syst. 2011, 19, 623–635. [Google Scholar]
- Rabah, K.; Ladaci, S. Fractional adaptive sliding mode control laws for fractional-order chaotic systems synchronization. In Proceedings of the International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA’2016), Sousse, Tunisia, 19 December 2016; Volume 17, pp. 293–302. [Google Scholar]
- Huang, Y.J.; Kuo, T.C.; Chang, S.H. Adaptive sliding-mode control for nonlinear systems with uncertain parameters. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2008, 38, 534–539. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Wang, H.; Liu, D.; Huang, H. Sliding mode control of a class of fractional chaotic systems in the presence of parameter perturbations. J. Vib. Control 2015, 21, 435–448. [Google Scholar] [CrossRef]
- Morari, M.; Zafiriou, E. Robust Process Control; Prentice-Hall: Englewood Cliffs, NJ, USA, 1989. [Google Scholar]
- Hosseinnia, S.H.; Ghaderi, R.; Ranjbar, N.A.; Mahmoudiana, M.; Momani, S. Sliding mode synchronization of an uncertain fractional order chaotic system. Comput. Math. Appl. 2010, 59, 1637–1643. [Google Scholar] [CrossRef]
- Ho, H.F.; Wong, Y.K.; Rad, A.B. Adaptive fuzzy sliding mode control with chattering elimination for nonlinear siso systems. Simul. Model. Prac. Theory 2009, 17, 1199–1210. [Google Scholar] [CrossRef]
- Lin, T.C.; Lee, T.Y.; Balas, V.E. Adaptive fuzzy sliding mode control for synchronization of uncertain fractional order chaotic systems. Chaos Solitons Fractals 2011, 44, 791–801. [Google Scholar] [CrossRef]
- Sutha, S.; Lakshmi, P.; Sankaranarayanan, S. Fractional-order sliding mode controller design for a modified quadruple tank process via multi-level switching. Comput. Electr. Eng. 2015, 45, 10–21. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Bourouba, B.; Ladaci, S.; Chaabi, A. Reduced order model approximation of fractional order systems using differential evolution algorithm. J. Control Autom. Electr. Syst. 2018, 29, 32–43. [Google Scholar] [CrossRef]
- Ladaci, S.; Charef, A. On fractional adaptive control. Nonlinear Dyn. 2006, 43, 365–378. [Google Scholar] [CrossRef]
- Diethlem, K. Efficient solution of multi-term fractional differential equations using P(EC)mE methods. Computing 2003, 71, 305–319. [Google Scholar] [CrossRef]
- Yin, C.; Dadras, S.; Zhong, S.; Chen, Y.Q. Control of a novel class of fractional-order chaotic systems via adaptive sliding mode control approach. Appl. Math. Model. 2013, 37, 2469–2483. [Google Scholar] [CrossRef]
- Lu, J.G.; Chen, G. A note on the fractional-order chen system. Chaos Solitons Fractals 2006, 27, 685–688. [Google Scholar] [CrossRef]
- Gomez, J.F.; Jamshidi, M. Fuzzy adaptive control for a uav. J. Intell. Robot. Syst. 2011, 62, 271–293. [Google Scholar] [CrossRef]
- Ren, C.; Tong, S.; Li, Y. Fuzzy adaptive high-gain-based observer backstepping control for siso nonlinear systems with dynamical uncertainties. Nonlinear Dyn. 2012, 67, 941–955. [Google Scholar] [CrossRef]
- Chen, B.S.; Lee, C.H.; Chang, Y.C. H∞ tracking design of uncertain nonlinear siso systems: Adaptive fuzzy approach. IEEE Trans. Fuzzy Syst. 1996, 4, 32–43. [Google Scholar] [CrossRef]
- Yin, C.; Zhong, S.; Chen, W. Design of sliding mode controller for a class of fractional-order chaotic systems. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 356–366. [Google Scholar] [CrossRef]
- Leonov, G.A.; Kuznetsov, N.V. On differences and similarities in the analysis of Lorenz, Chen and Lu systems. Appl. Math. Comput. 2015, 256, 334–343. [Google Scholar] [CrossRef]
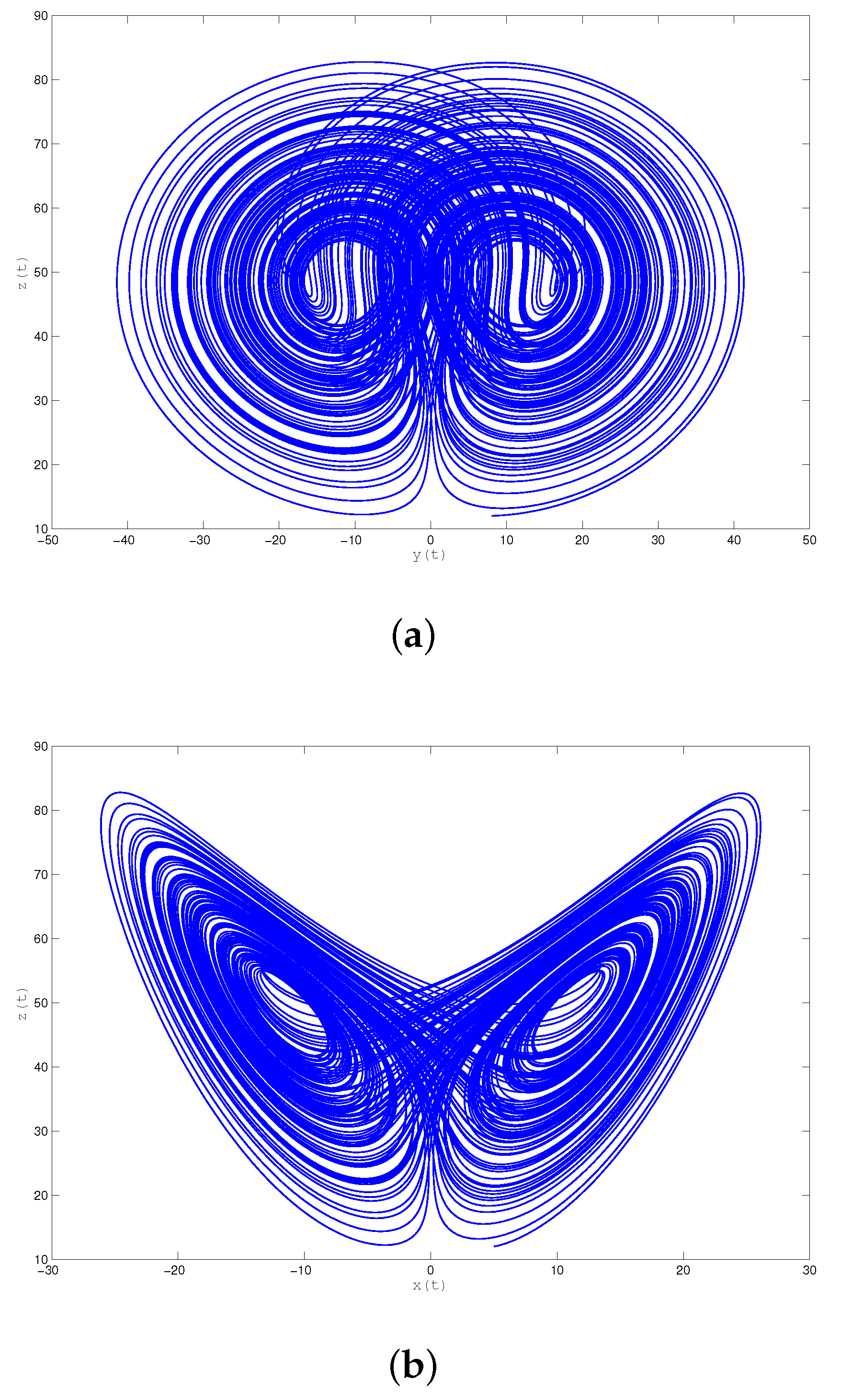
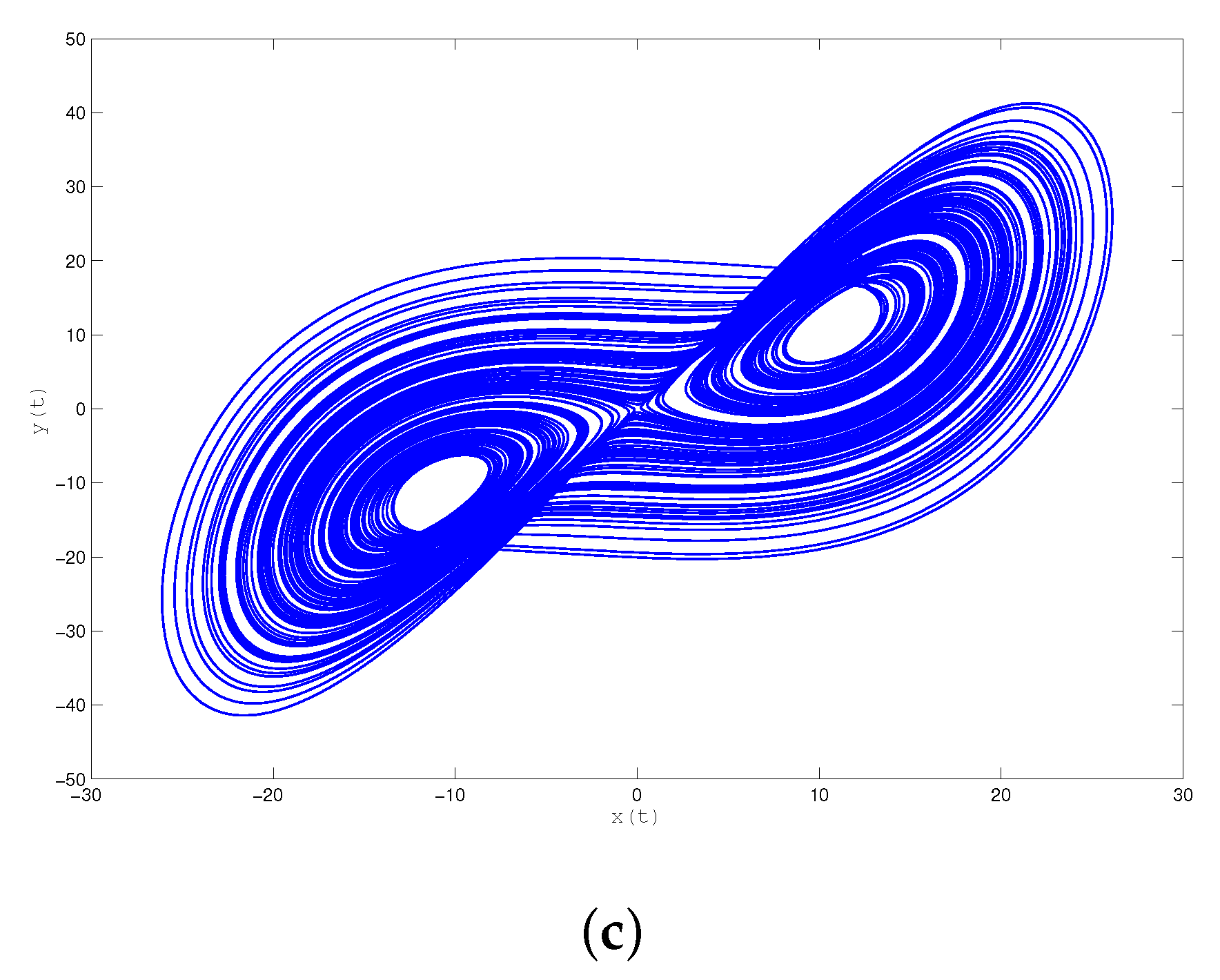
Figure 1.
Chaotic State trajectories of the fractional-order Chen system: (a) states z-y; (b) states z-x; and (c) states y-x.
Figure 1.
Chaotic State trajectories of the fractional-order Chen system: (a) states z-y; (b) states z-x; and (c) states y-x.


Figure 2.
State trajectories of stabilized fractional-order Chen system.


Figure 3.
Phase portrait of the controlled system.

Figure 4.
The time response of the controller .

Figure 5.
The sliding surface.

Figure 6.
State trajectories of stabilized uncertain fractional-order Chen system: (a) x state; (b) y state; and (c) z state.
Figure 6.
State trajectories of stabilized uncertain fractional-order Chen system: (a) x state; (b) y state; and (c) z state.

Figure 7.
Phase portrait of the controlled uncertain system.

Figure 8.
Fuzzy control signal .

Figure 9.
Global control signal .

Figure 10.
The sliding surface.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Class of nonlinear fractional-order systems characterized by Equation (11).
Table 1.
Class of nonlinear fractional-order systems characterized by Equation (11).
| Name | Model | ||||
|---|---|---|---|---|---|
| Chen’s system | a | x | 0 | ||
| Lorenz system | a | x | 0 | ||
| Lu’s system | a | x | 0 | ||
| Liu system | x | 0 | |||
| Financial system | x | 0 | 1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Bourouba, B.; Ladaci, S. Robust Fuzzy Adaptive Sliding Mode Stabilization for Fractional-Order Chaos. Algorithms 2018, 11, 101. https://doi.org/10.3390/a11070101
AMA Style
Bourouba B, Ladaci S. Robust Fuzzy Adaptive Sliding Mode Stabilization for Fractional-Order Chaos. Algorithms. 2018; 11(7):101. https://doi.org/10.3390/a11070101
Chicago/Turabian StyleBourouba, Bachir, and Samir Ladaci. 2018. "Robust Fuzzy Adaptive Sliding Mode Stabilization for Fractional-Order Chaos" Algorithms 11, no. 7: 101. https://doi.org/10.3390/a11070101
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.