
Tree Stem Diameter Estimation from Mobile Laser Scanning Using Line-Wise Intensity-Based Clustering


Abstract
:1. Introduction
2. Materials and Methods
2.1. Data Collection
2.2. Reference Data
2.3. System Description
2.3.1. Laser Scanner SICK LMS 511
2.3.2. The Chameleon Positioning System
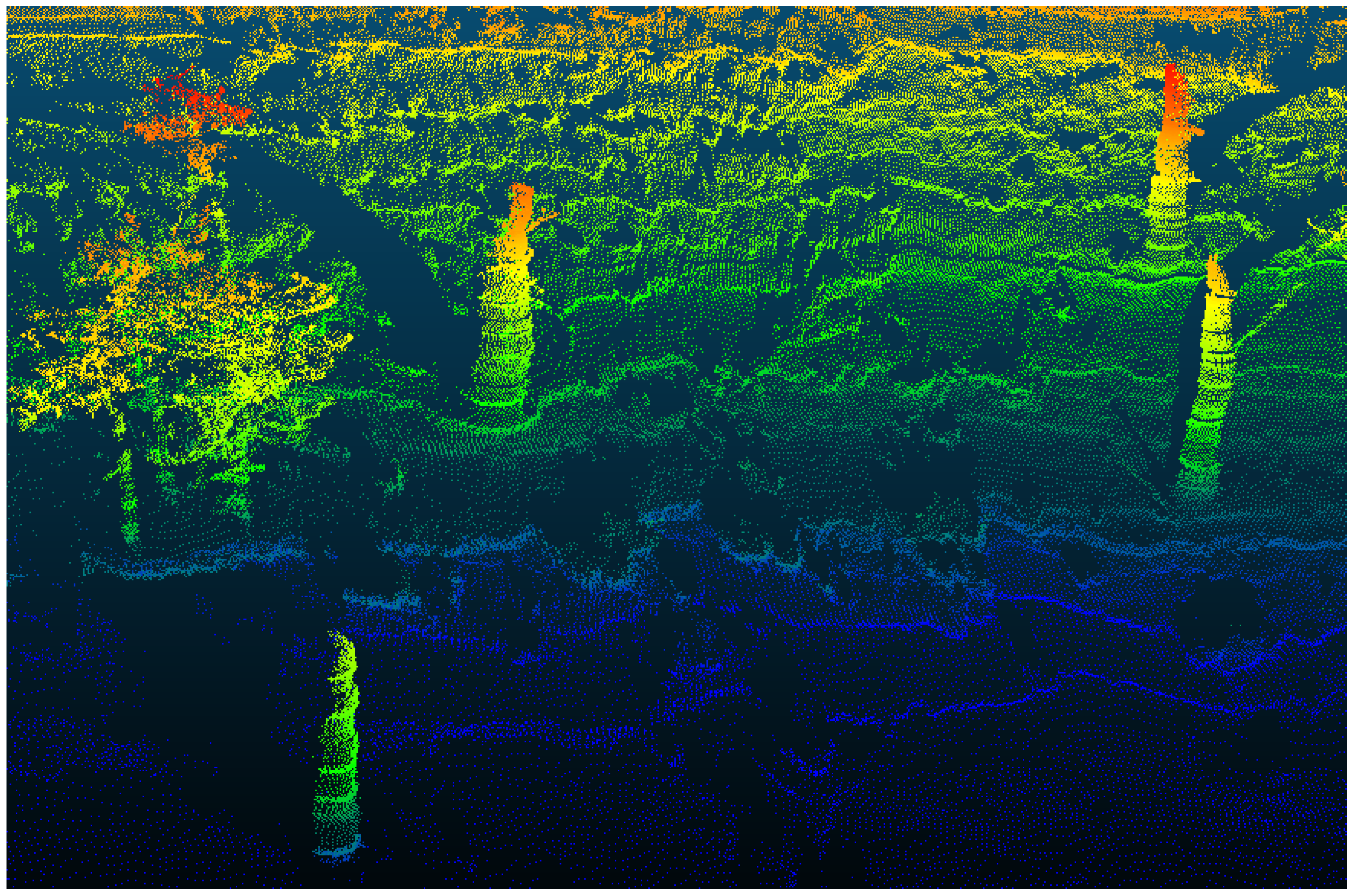
2.3.3. 3D Point Cloud
- Transform from polar coordinates in the sensor system to Cartesian coordinates.
- Rotate the sensor coordinates according to the inclination.
- Rotate the sensor coordinates according to the Chameleon rotation.
- Translate the sensor coordinates to the Chameleon position.
- Store points in a coordinate system originating in the starting point.
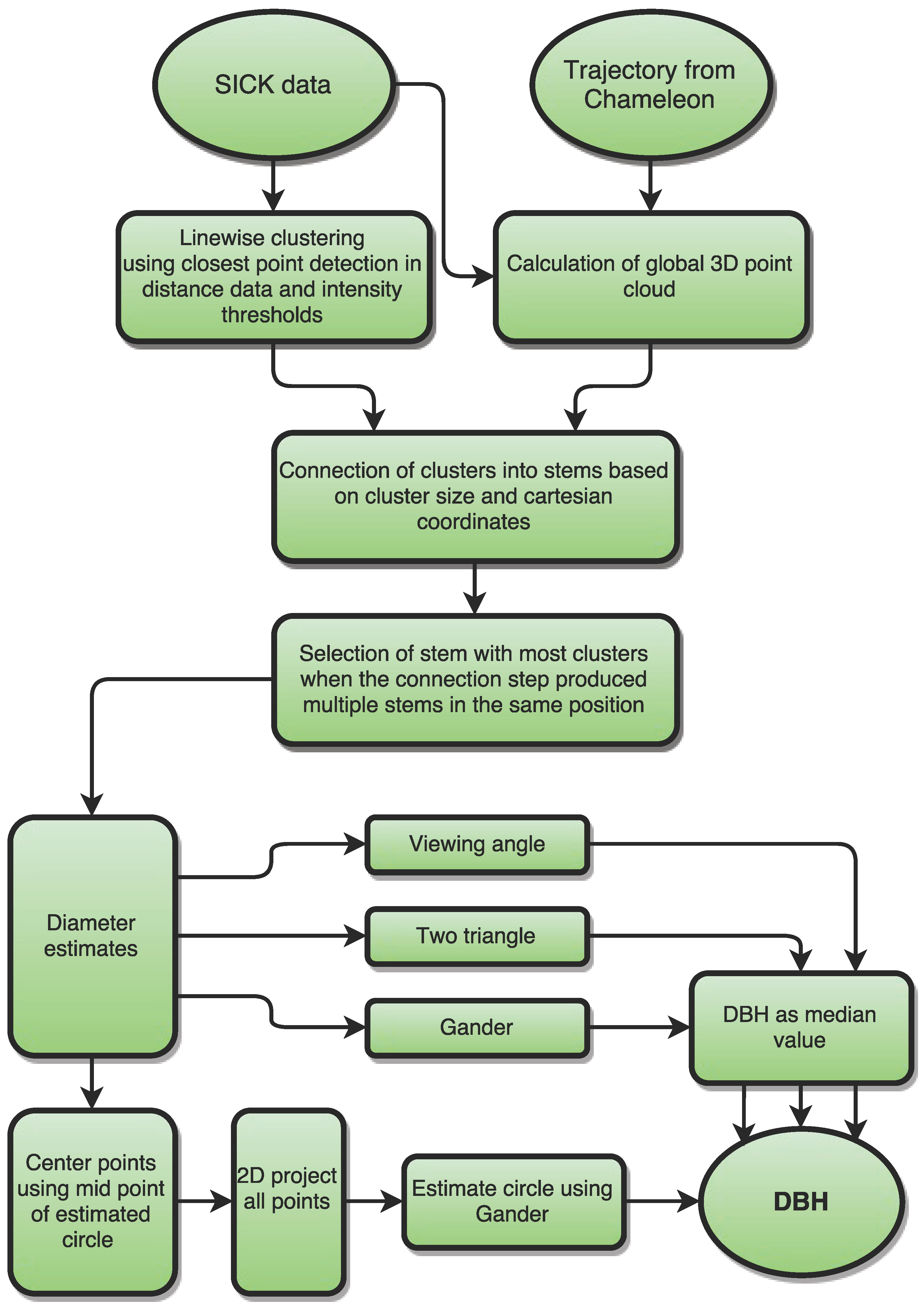
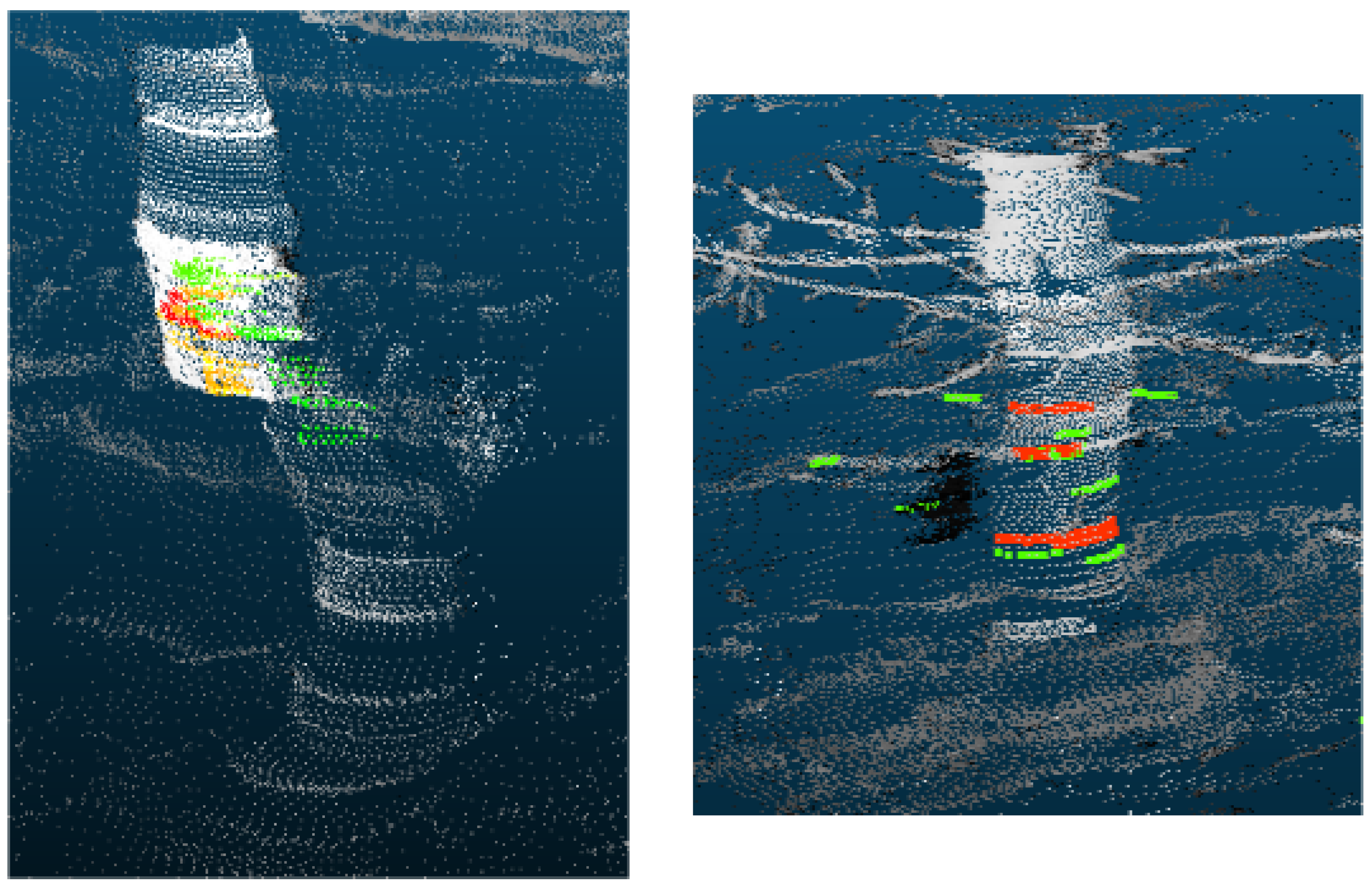
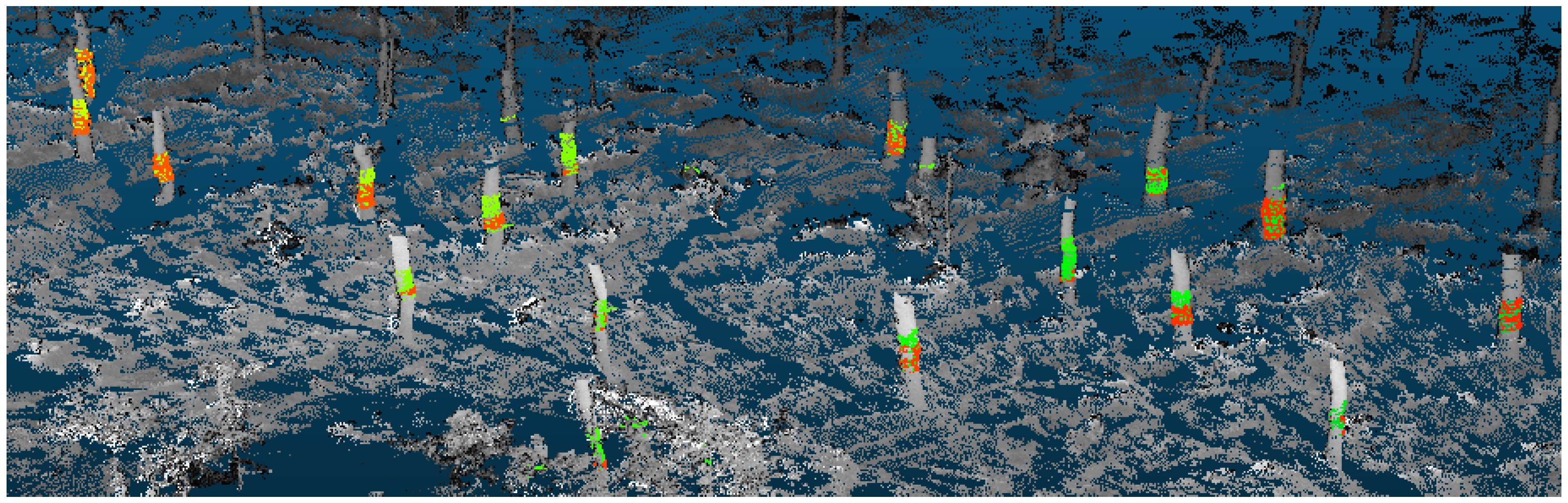
2.3.4. Tree Extraction and DBH Estimation
Clustering and Connection
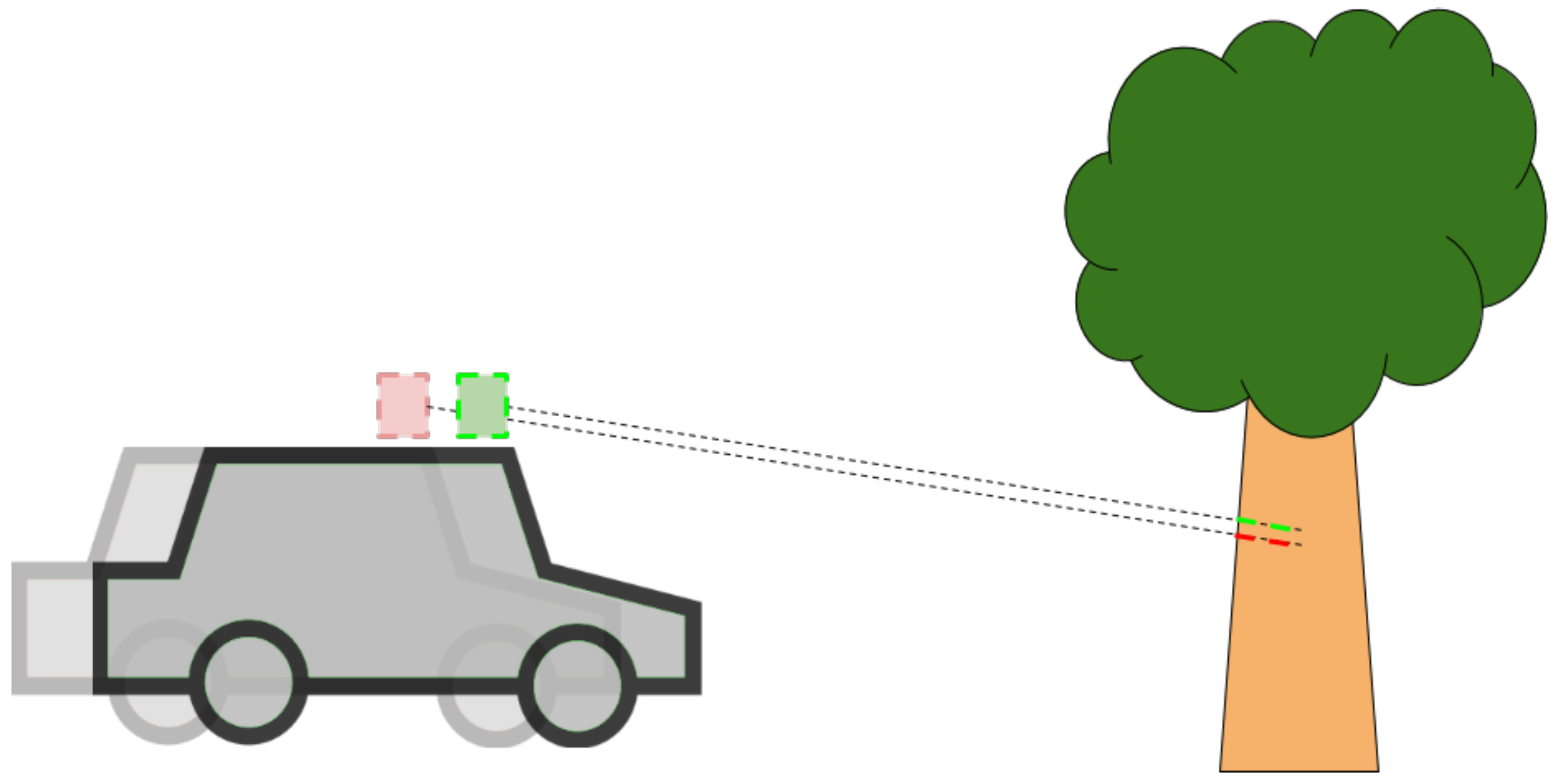
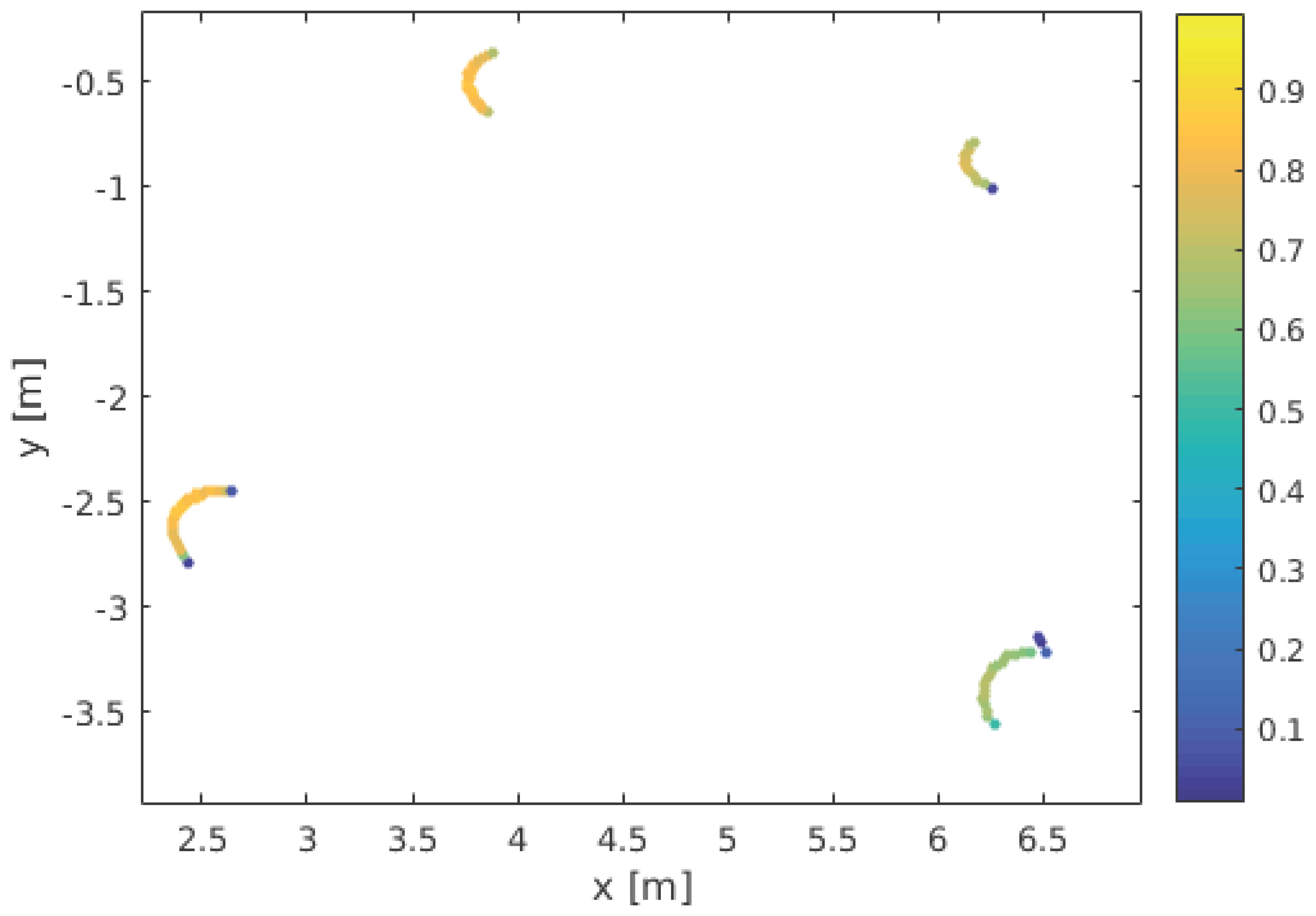
- Trees are detected line-wise in the SICK distance data by detecting negative peaks (shortest distances) that have between 5 and 300 points and are separated with a minimum of 3 points from the next peak.
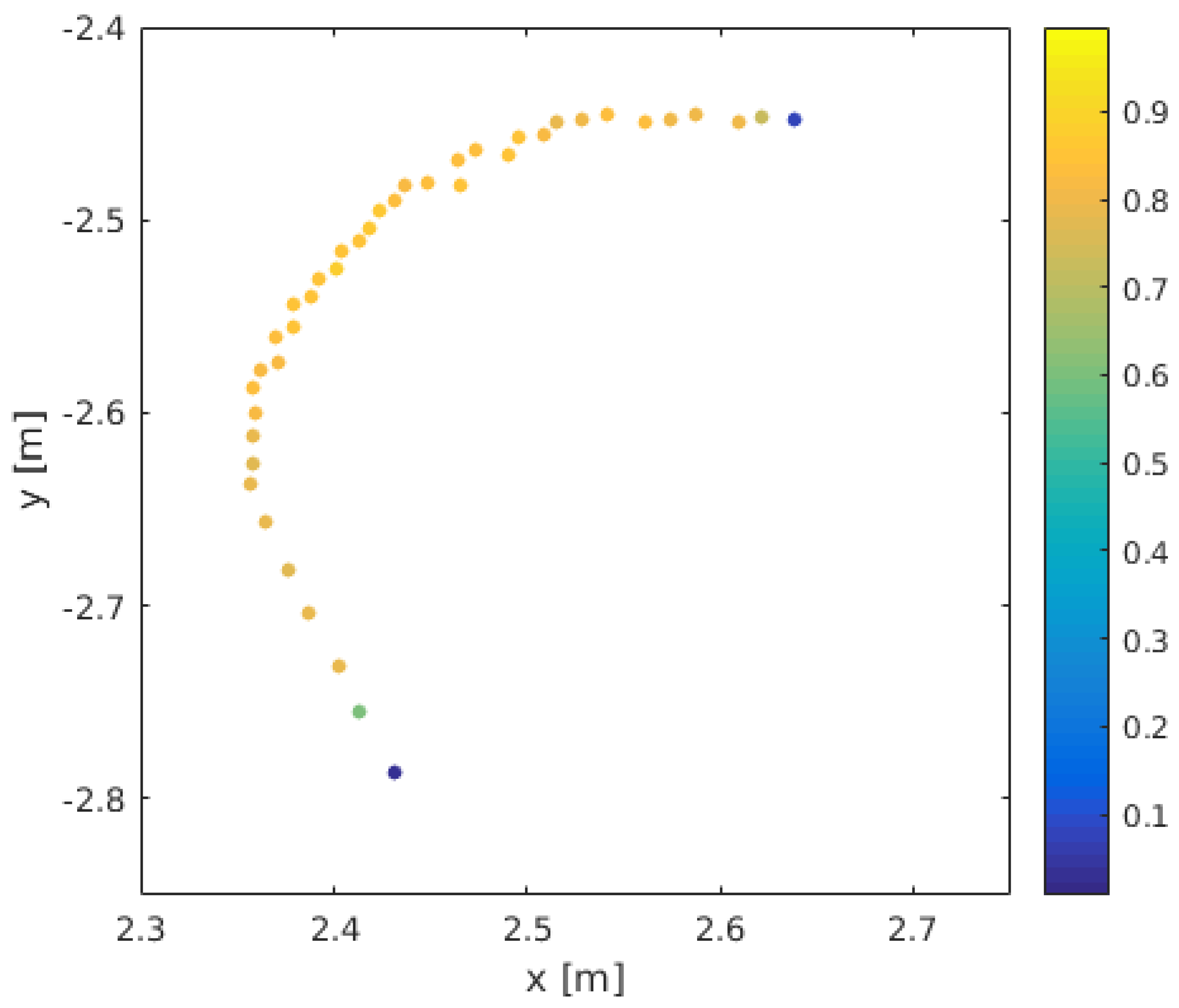
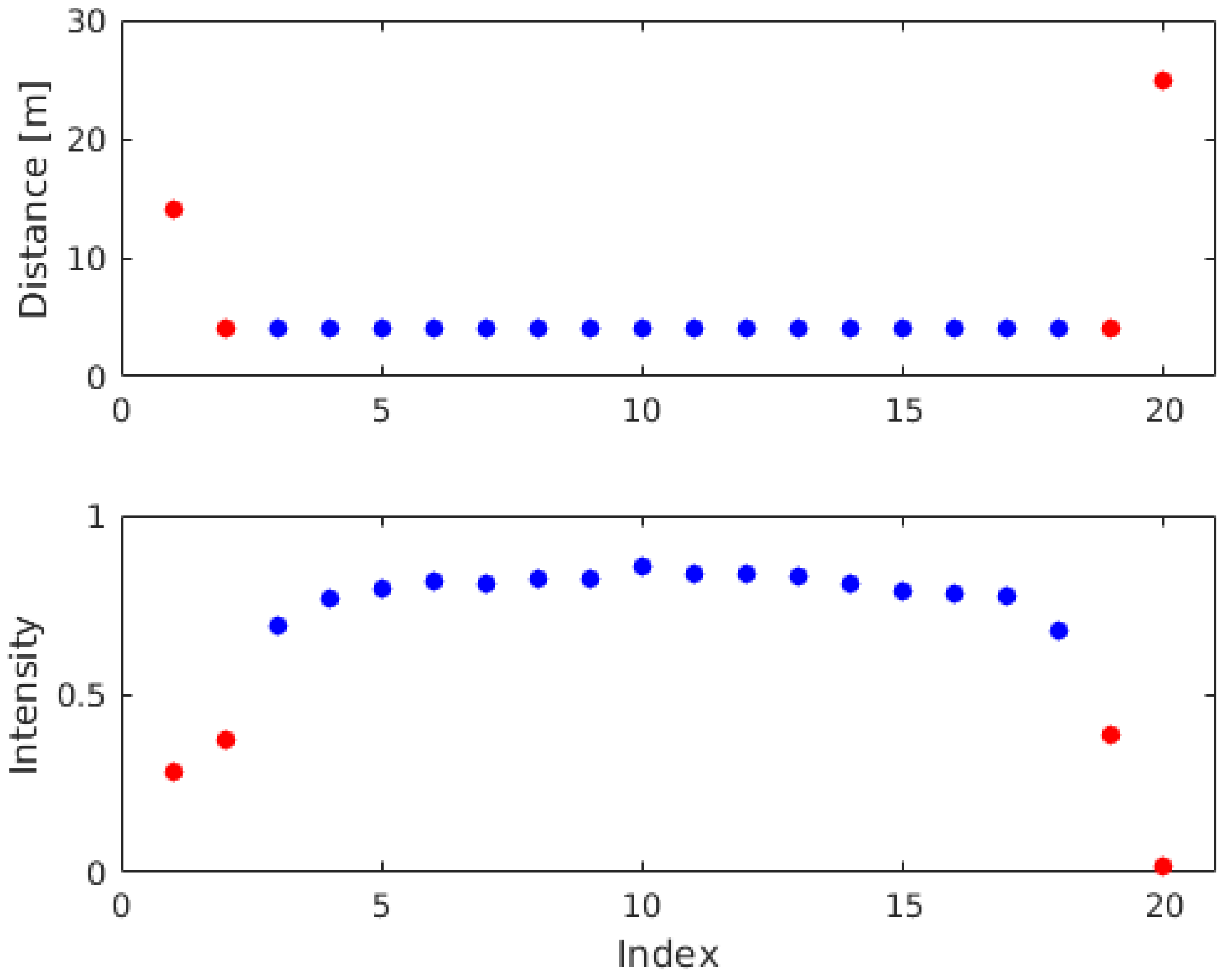
- For each peak, the intensity value of the peak point is saved as a seed point, and then, points to the left and the right are included in the cluster until
- (a)
- the intensity dips under 0.7 times the seed point intensity, or
- (b)
- the difference in distance from the scanner to two neighboring points is larger than 5 cm. A larger distance difference implies that the echo was not returned from the same stem.
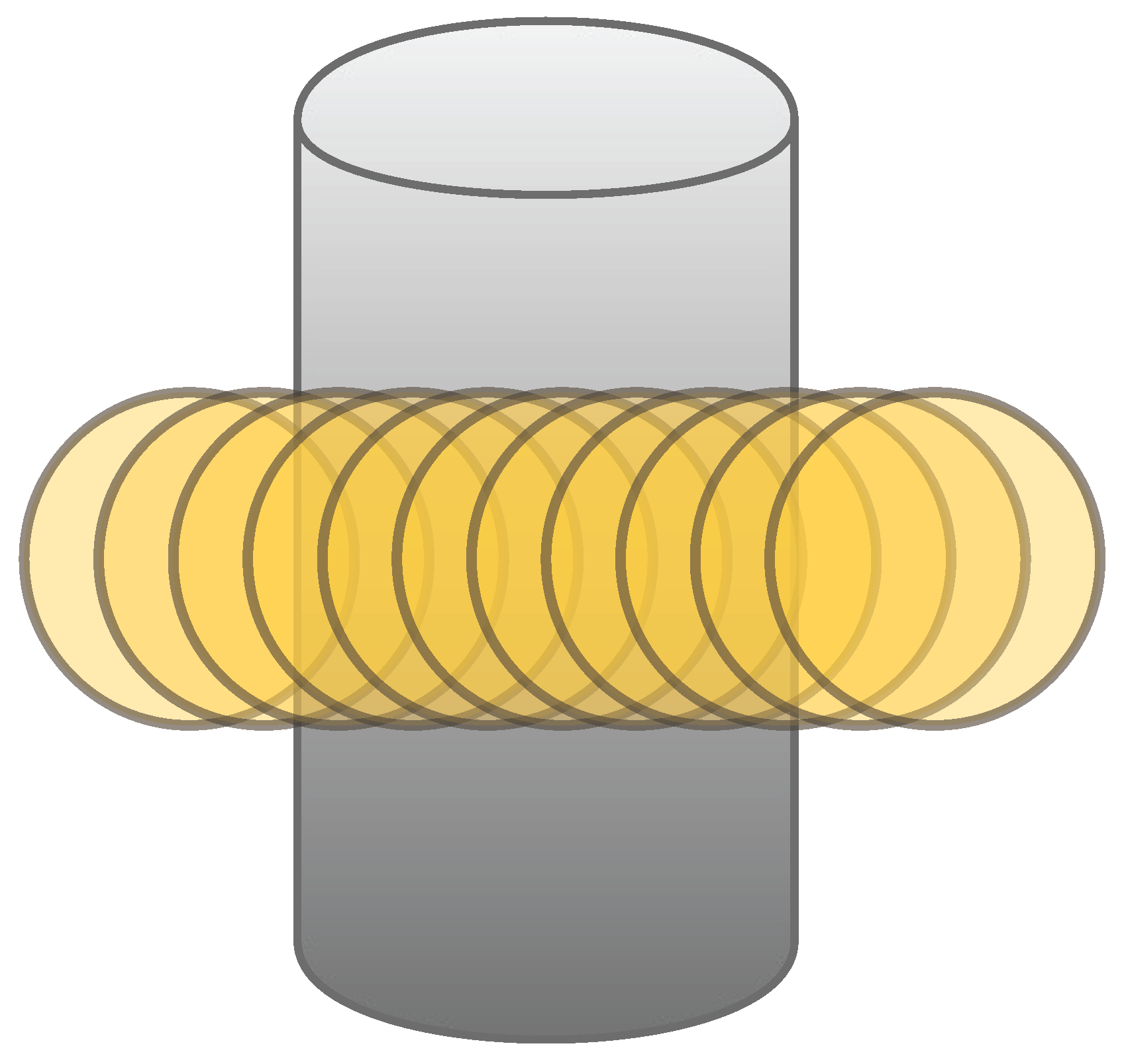
- For each cluster where the z-coordinate (height) is within an interval around breast height ( m) in the scanner coordinate system,
- (a)
- For the cluster points, a circle fit is done. If the radius is between 3 cm and 50 cm and all of the residuals to the circle are smaller than 4 cm, the cluster is kept.
- (b)
- For each accepted cluster, the Cartesian coordinates are extracted from the point cloud.
- (c)
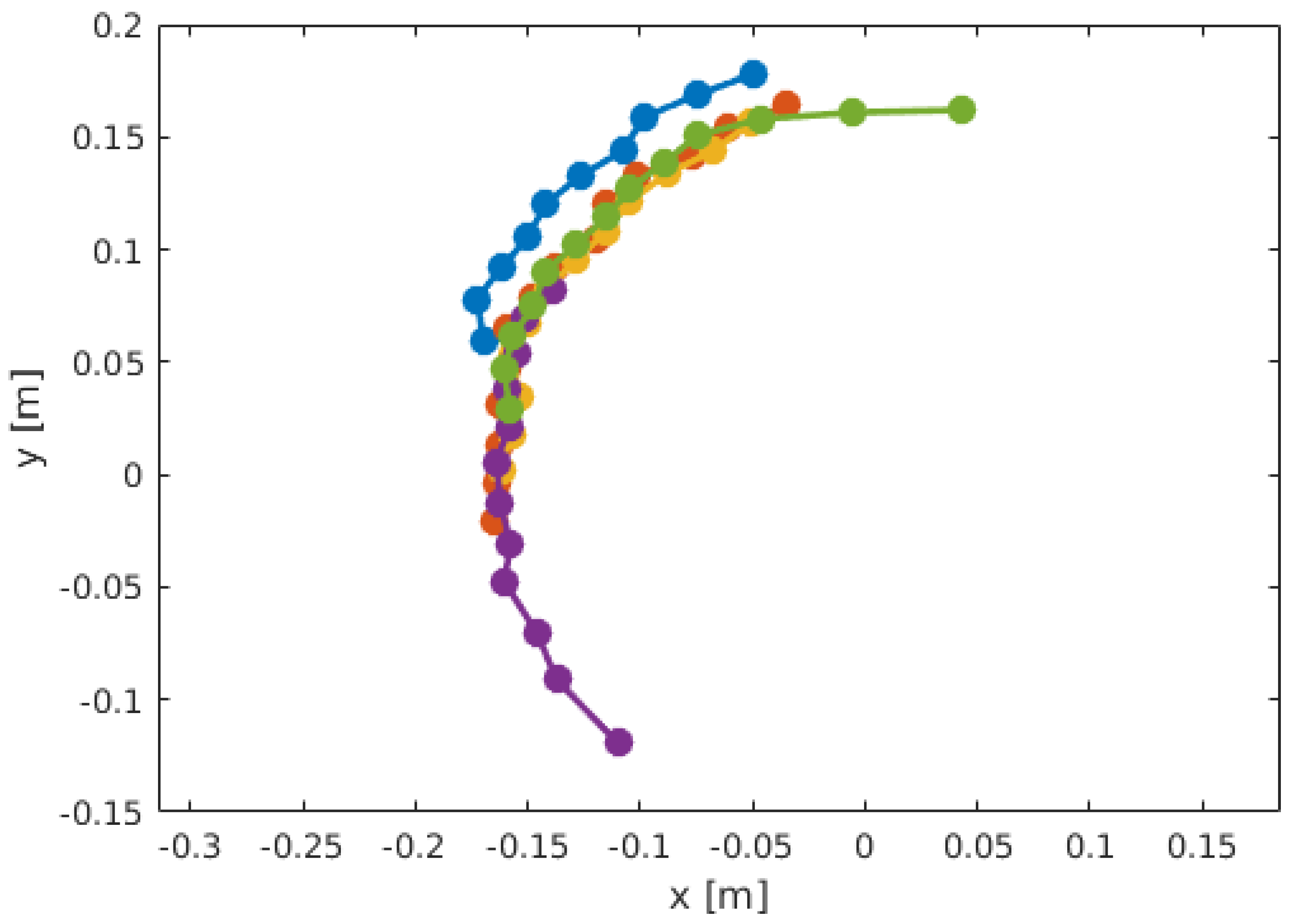
- Compare to the set of stems. The last cluster to be included in each stem, the top circle, is used as the reference. Include the cluster in a stem if:
- The x/y-coordinate of the fitted circle is within 10 cm of the top circle of the stem.
- The radius of the fitted circle is within 4 cm of the top circle of the stem.
- The line index of the clusters endpoints is close enough to the index of the top circle (Movement 1 index/line number difference is allowed).
- (d)
- Otherwise, a new stem is established from the cluster.
Post-Processing
- For all stems, calculate the mean position
- For each stem:
- (a)
- Calculate the distance to all other stems
- (b)
- For stems within a 1-m horizontal distance of the processed stem, select the stem containing the most clusters.
- (c)
- Remove the stem clusters from the set of unprocessed stems.
Finding Breast Height in the Point Cloud
DBH Estimation
2.3.5. Evaluation
3. Results
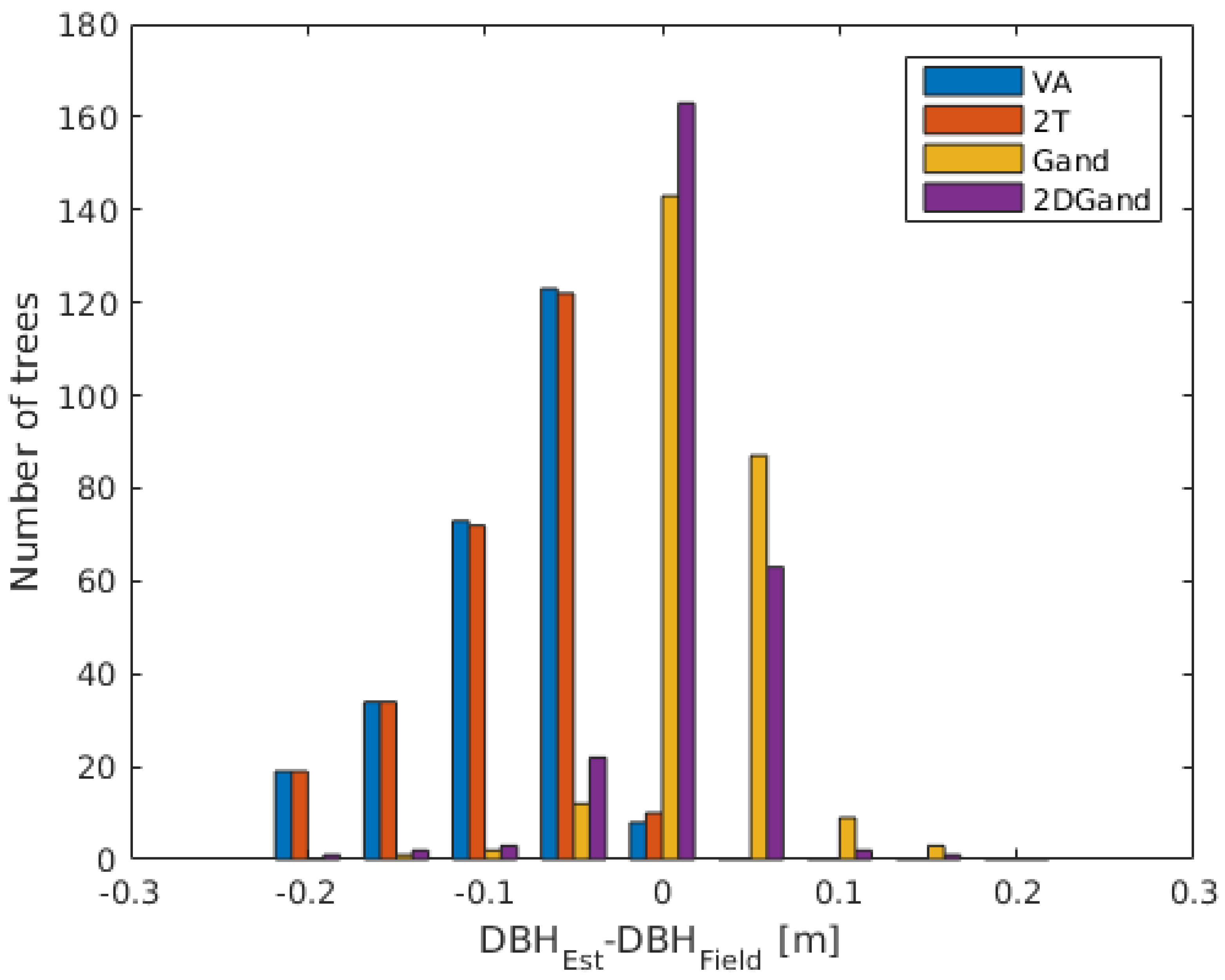
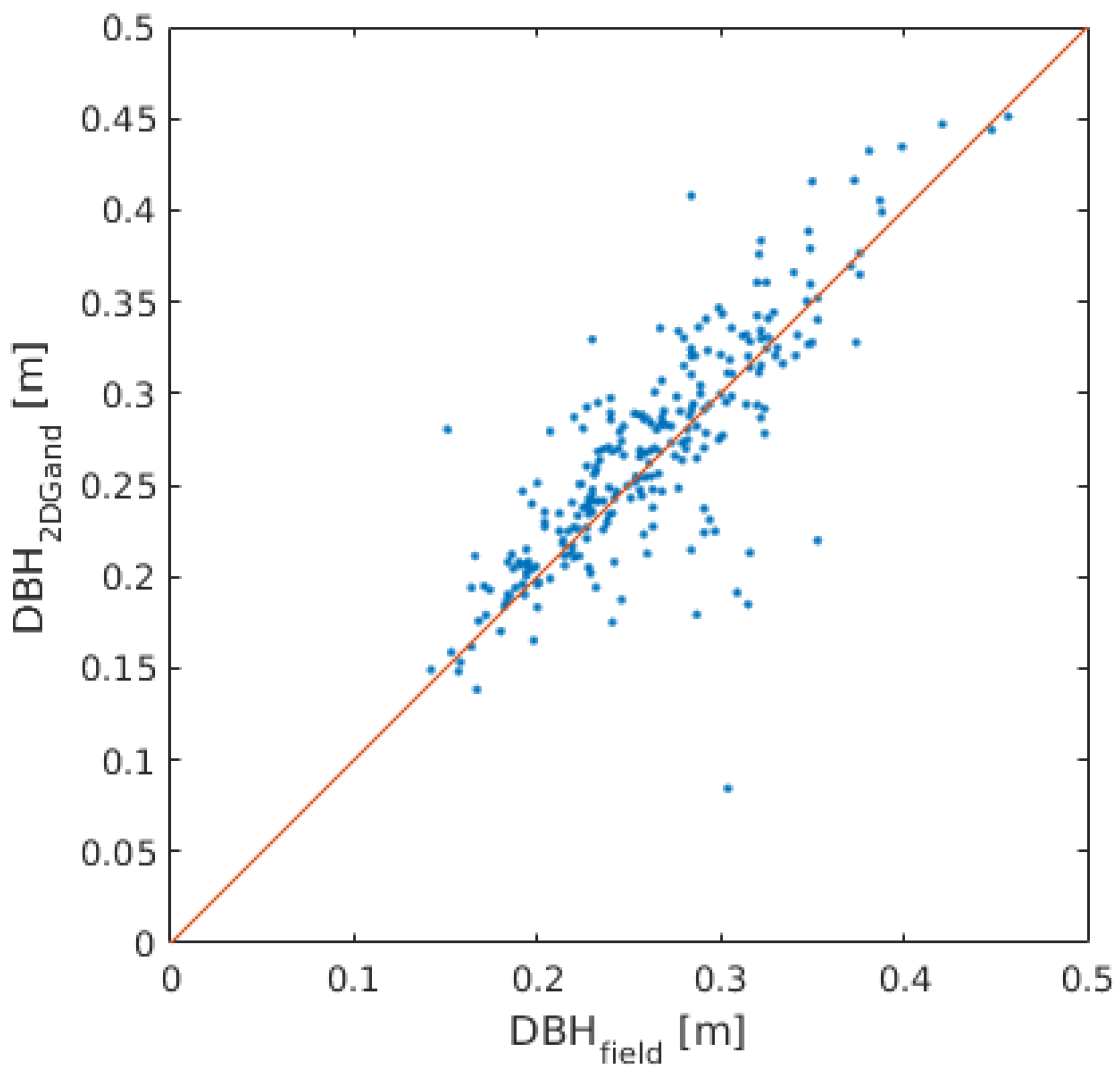
3.1. Diameter Estimation
3.2. Tree Detection
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Holopainen, M.; Vastaranta, M.; Hyyppä, J. Outlook for the Next Generation’s Precision Forestry in Finland. For. Trees Livelihoods 2014, 5, 1682–1694. [Google Scholar] [CrossRef]
- Öhman, M.; Miettinen, M.; Kannas, K.; Jutila, J.; Visala, A.; Forsman, P. Tree Measurement and Simultaneous Localization and Mapping System for Forest Harvesters. In Field and Service Robotics; Springer Tracts in Advanced Robotics; Springer (Berlin Heidelberg): Heidelberg, Germany, 2008; pp. 369–378. [Google Scholar]
- Roßmann, J.; Krahwinkler, P.; Schlette, C. Navigation of mobile robots in natural environments: Using sensor fusion in forestry. J. Syst. Cybern. Inform. 2010, 8, 67–71. [Google Scholar]
- Thies, M.; Pfeifer, N.; Winterhalder, D.; Gorteb, B.G.H. Three-dimensional Reconstruction of Stems for Assessment of Taper, Sweep and Lean Based on Laser Scanning of Standing Trees. Scand. J. For. Res. 2004, 19, 571–581. [Google Scholar] [CrossRef]
- Pfeifer, N.; Gorte, B.; Winterhalder, D. Automatic Reconstruction of Single Trees from Terrestrial Laser Scanner Data. In Proceedings of the 20th ISPRS Congress, Istanbul, Turkey, 12–23 July 2004.
- Pfeifer, N.; Winterhalder, D. Modelling of Tree Cross Sections from Terrestrial Laser Scanning Data with Free-form Curves. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, XXXVI, 76–81. [Google Scholar]
- Lindberg, E.; Holmgren, J.; Kenneth, O.; Olsson, H. Estimation of stem attributes using a combination of terrestrial and airborne laser scanning. Eur. J. For. Res. 2012, 131, 1917–1931. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Yu, X.; Hyyppä, J.; Holopainen, M. Automated stem curve measurement using terrestrial laser scanning. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1739–1748. [Google Scholar] [CrossRef]
- Olofsson, K.; Holmgren, J.; Olsson, H. Tree Stem and Height Measurements Using Terrestrial Laser Scanning and the RANSAC Algorithm. Remote Sens. 2014, 6, 4323–4344. [Google Scholar] [CrossRef]
- Treemetrics. Available online: http://www.treemetrics.com (accessed on 13 September 2016).
- Hackenberg, J.; Wassenberg, M.; Spiecker, H.; Sun, D. Non Destructive Method for Biomass Prediction Combining TLS Derived Tree Volume and Wood Density. For. Trees Livelihoods 2015, 6, 1274–1300. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Hauglin, M.; Astrup, R.; Gobakken, T.; Næsset, E. Estimating single-tree branch biomass of Norway spruce with terrestrial laser scanning using voxel-based and crown dimension features. Scand. J. For. Res. 2013, 28, 456–469. [Google Scholar] [CrossRef]
- Kankare, V.; Holopainen, M.; Vastaranta, M.; Puttonen, E.; Yu, X.; Hyyppä, J.; Vaaja, M.; Hyyppä, H.; Alho, P. Individual tree biomass estimation using terrestrial laser scanning. ISPRS J. Photogramm. Remote Sens. 2013, 75, 64–75. [Google Scholar] [CrossRef]
- Pueschel, P.; Newnham, G.; Rock, G.; Udelhoven, T.; Werner, W.; Hill, J. The influence of scan mode and circle fitting on tree stem detection, stem diameter and volume extraction from terrestrial laser scans. ISPRS J. Photogramm. Remote Sens. 2013, 77, 44–56. [Google Scholar] [CrossRef]
- Krooks, A.; Kaasalainen, S.; Hakala, T.; Nevalainen, O. Correction of Intensity Incidence Angle Effect in Terrestrial Laser Scanning. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, II-5/W2, 145–150. [Google Scholar] [CrossRef]
- Kelbe, D.; Romanczyk, P.; van Aardt, J.; Cawse-Nicholson, K. Reconstruction of 3D tree stem models from low-cost terrestrial laser scanner data. In Proceedings of the SPIE 8731, Laser Radar Technology and Applications XVIII, 2013, Baltimore, MD, USA, 29 April–3 May 2013. [CrossRef]
- Kelbe, D.; van Aardt, J.; Romanczyk, P.; van Leeuwen, M.; Cawse-Nicholson, K. Single-Scan Stem Reconstruction Using Low-Resolution Terrestrial Laser Scanner Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3414–3427. [Google Scholar] [CrossRef]
- Brunner, A.; Gizachew, B. Rapid detection of stand density, tree positions, and tree diameter with a 2D terrestrial laser scanner. Eur. J. For. Res. 2014, 133, 819–831. [Google Scholar] [CrossRef]
- Ringdahl, O.; Hohnloser, P.; Hellström, T.; Holmgren, J.; Lindroos, O. Enhanced Algorithms for Estimating Tree Trunk Diameter Using 2D Laser Scanner. Remote Sens. 2013, 5, 4839–4856. [Google Scholar] [CrossRef]
- Jutila, J.; Kannas, K.; Visala, A. Tree Measurement in Forest by 2D Laser Scanning. In Proceedings of the 2007 IEEE International Symposium on Computational Intelligence in Robotics and Automation, Jacksonville, FL, USA, 20–23 June 2007.
- Wang, D.; Liu, J.; Wang, J. Diameter Fitting by Least Square Algorithm Based on the Data Acquired with a 2-D Laser Scanner. Procedia Eng. 2011, 15, 1560–1564. [Google Scholar]
- Kong, J.; Ding, X.; Liu, J.; Yan, L.; Wang, J. New Hybrid Algorithms for Estimating Tree Stem Diameters at Breast Height Using a Two Dimensional Terrestrial Laser Scanner. Sensors 2015, 15, 15661–15683. [Google Scholar] [CrossRef] [PubMed]
- Brach, M.; Zasada, M. The effect of mounting height on GNSS receiver positioning accuracy in forest conditions. Croat. J. For. Eng. 2014, 35, 245–253. [Google Scholar]
- Antonio, A. GNSS/INS Integration Methods; University of Calgary: Calgary, AB, Canada, 2010. [Google Scholar]
- Dissanayake, M.W.M.G.; Newman, P.; Clark, S.; Whyte, H.F.W.; Csorba, M. A solution to the simultaneous localization and map building (SLAM) problem. IEEE Trans. Rob. Autom. 2001, 17, 229–241. [Google Scholar] [CrossRef]
- Pesyna, K.M., Jr.; Heath, R.W., Jr.; Humphreys, T.E. Centimeter positioning with a smartphone-quality GNSS antenna. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 1568–1577.
- Chen, Y.; Zhao, S.; Farrell, J.A. Computationally Efficient Carrier Integer Ambiguity Resolution in Multiepoch GPS/INS: A Common-Position-Shift Approach. IEEE Trans. Control Syst. Technol. 2015, 24, 1541–1556. [Google Scholar] [CrossRef]
- Barth, A.; Willén, E.; Holmgren, J.; Olofsson, K.; Bilock, E.; Engström, P.; Larsson, H.; Rydell, J. Mobilt Mätsystem för Insamling av Träd- och Beståndsdata; Technical Report; Forestry Research Agency of Sweden: Skogforsk, Sweden, 2014. [Google Scholar]
- Haglöf. Available online: http://www.haglofcg.com (accessed on 31 May 2016).
- Nilsson, M.; Nordkvist, K.; Jonzén, J.; Lindgren, L.; Axensten, P.; Wallerman, J.; Egberth, M.; Larsson, S.; Nilsson, L.; Eriksson, J.; et al. A Nationwide Forest Attribute Map of Sweden Derived using Airborne laser scanning data and field data from the national forest inventory. In Proceedings of the SilviLaser 2015, La Grande Motte, France, 28–30 September 2015; pp. 211–213.
- Swedish Forest Agency. Available online: http://www.skogsstyrelsen.se/Aga-och-bruka/Skogsbruk/Karttjanster/Laserskanning/ (accessed on 23 August 2016).
- Rydell, J.; Emilsson, E. Chameleon: Visual-inertial indoor navigation. In Proceedings of the Position Location and Navigation Symposium (PLANS), 2012 IEEE/ION, Myrtle Beach, SC, USA, 23–26 April 2012; pp. 541–546.
- Gander, W.; Golub, G.H.; Strebel, R. Least-squares fitting of circles and ellipses. BIT Numer. Math. 1994, 34, 558–578. [Google Scholar] [CrossRef]
- Börlin, N.; Grussenmeyer, P. Bundle Adjustment with and without Damping. Photogramm. Rec. 2013, 28, 396–415. [Google Scholar] [CrossRef]
- Hellström, T.; Hohnloser, P.; Ringdahl, O. Tree Diameter Estimation Using Laser Scanner; Technical Report UMINF 12.20; Umeå University: Umeå, Sweden, 2012. [Google Scholar]
- Liang, X.; Hyyppä, J.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Yu, X. The Use of a Mobile Laser Scanning System for Mapping Large Forest Plots. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1504–1508. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | Stems/ha | DBH Mean (cm) | Height (m) | Species | Terrain Type |
|---|---|---|---|---|---|
| Basal Area (m2/ha) | Range (cm) | Understory | |||
| Älvan | 812 | 23 | 23 | Spruce | Flat |
| 44 | 5–38 | (Picea abies L.) | Low | ||
| Malmköping 1 | 366 | 24 | 26 | Young pine | Flat |
| 17 | 5–39 | (Pinus sylvestris L.) | Occasional | ||
| Malmköping 2 | 509 | 18 | 15 | Young pine | Broken |
| 17 | 3–34 | (Pinus sylvestris L.) | Occasional | ||
| Sonstorp 1 | 668 | 27 | 32 | Spruce | Flat |
| 37 | 6–46 | (Picea abies L.) | Occasional | ||
| Sonstorp 2 | 573 | 23 | 25 | Spruce | Broken |
| 35 | 7–37 | (Picea abies L.) | Occasional |
| Parameter | Value |
|---|---|
| Beam width | 0.68 deg |
| Separation angle | 0.1667 deg |
| Min distance | 0.7 m |
| Max distance | 65 m |
| Wavelength | 950 nm |
| Scanning frequency | 25 Hz |
| Field of view | 190 deg |
| Point separation @10 m | 2.9 cm |
| Spot size on front screen | 1.4 cm |
| Footprint @10 m | 13.3 cm |
| 2T | VA | Gand | 2DGand | ||
|---|---|---|---|---|---|
| Älvan | Bias (m) | −0.086 | −0.085 | 0.012 | 0.001 |
| RMSE (m) | 0.097 | 0.096 | 0.027 | 0.032 | |
| rBias (%) | −32.68 | −32.42 | 4.50 | 0.30 | |
| rRMSE (%) | 36.95 | 36.74 | 10.32 | 12.35 | |
| Sonstorp 1 | Bias (m) | −0.086 | −0.085 | 0.029 | 0.020 |
| RMSE (m) | 0.097 | 0.097 | 0.046 | 0.042 | |
| rBias (%) | −32.07 | −31.83 | 10.81 | 7.60 | |
| rRMSE (%) | 36.42 | 36.24 | 17.18 | 15.90 | |
| Sonstorp 2 | Bias (m) | −0.095 | −0.094 | 0.010 | −0.000 |
| RMSE (m) | 0.108 | 0.107 | 0.039 | 0.035 | |
| rBias (%) | −32.49 | −32.24 | 3.41 | −0.14 | |
| rRMSE (%) | 37.01 | 36.82 | 13.46 | 12.16 | |
| Malmköping 1 | Bias (m) | −0.085 | −0.085 | 0.030 | 0.005 |
| RMSE (m) | 0.096 | 0.096 | 0.041 | 0.035 | |
| rBias (%) | −33.13 | −32.92 | 11.74 | 2.04 | |
| rRMSE (%) | 37.36 | 37.20 | 15.77 | 13.70 | |
| Malmköping 2 | Bias (m) | −0.079 | −0.079 | 0.025 | 0.012 |
| RMSE (m) | 0.094 | 0.093 | 0.044 | 0.041 | |
| rBias (%) | −35.43 | −35.24 | 11.16 | 5.41 | |
| rRMSE (%) | 41.84 | 41.71 | 19.79 | 18.22 | |
| All | Bias (m) | −0.087 | −0.086 | 0.019 | 0.006 |
| RMSE (m) | 0.099 | 0.099 | 0.038 | 0.037 | |
| rBias (%) | −33.00 | −32.77 | 7.12 | 2.30 | |
| rRMSE (%) | 37.72 | 37.54 | 14.61 | 13.97 | |
| 2T | VA | Gand | 2DGand | ||
|---|---|---|---|---|---|
| All | Bias (m) | −0.072 | −0.071 | 0.042 | 0.025 |
| RMSE (m) | 0.091 | 0.091 | 0.064 | 0.054 | |
| rBias (%) | −28.50 | −28.26 | 16.76 | 10.08 | |
| rRMSE (%) | 36.06 | 35.89 | 25.26 | 21.34 |
| Test Site | Found Trees Total | Field Trees Total | Matched Trees | Field Trees D < 10 m | Matched Trees D < 10 m | Commission D < 10 m | Omission D < 10 m |
|---|---|---|---|---|---|---|---|
| Älvan | 369 | 194 | 77 | 93 | 62 | 0 | 31 |
| Sonstorp 1 | 168 | 101 | 39 | 51 | 33 | 0 | 19 |
| Sonstorp 2 | 163 | 152 | 62 | 62 | 48 | 0 | 14 |
| Malmköping 1 | 170 | 85 | 34 | 38 | 27 | 0 | 11 |
| Malmköping 2 | 156 | 117 | 45 | 49 | 38 | 2 | 11 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Forsman, M.; Holmgren, J.; Olofsson, K. Tree Stem Diameter Estimation from Mobile Laser Scanning Using Line-Wise Intensity-Based Clustering. Forests 2016, 7, 206. https://doi.org/10.3390/f7090206
Forsman M, Holmgren J, Olofsson K. Tree Stem Diameter Estimation from Mobile Laser Scanning Using Line-Wise Intensity-Based Clustering. Forests. 2016; 7(9):206. https://doi.org/10.3390/f7090206
Chicago/Turabian StyleForsman, Mona, Johan Holmgren, and Kenneth Olofsson. 2016. "Tree Stem Diameter Estimation from Mobile Laser Scanning Using Line-Wise Intensity-Based Clustering" Forests 7, no. 9: 206. https://doi.org/10.3390/f7090206