Forest Planning Heuristics—Current Recommendations and Research Opportunities for s-Metaheuristics



1
Warnell School of Forestry and Natural Resources, University of Georgia, Athens, GA 30602, USA
2
Department of Forestry and Wildland Resources, Humboldt State University, Arcata, CA 95521, USA
*
Author to whom correspondence should be addressed.
Forests 2017, 8(12), 476; https://doi.org/10.3390/f8120476
Submission received: 16 October 2017
/
Revised: 15 November 2017
/
Accepted: 1 December 2017
/
Published: 3 December 2017
(This article belongs to the Special Issue Decision Support Approaches in Adaptive Forest Management—Selected Papers from the IUFRO 125th Anniversary Congress)
{kind=link}
{kind=link}
Abstract
:Adaptive forest management requires planning and implementation of activities designed to maintain or improve forest conditions, and in support of these endeavors knowledge of silviculture, economics, operations research, and other allied fields are necessary. With regard to forest planning, traditional (exact) mathematical techniques along with heuristics have been demonstrated as useful in developing alternative courses of action for forest managers to consider. In this discussion paper, we present six areas of future work with regard to investigations into the development of heuristics, along with several recommendations that are based on our experiences. These areas include process improvements, reversion strategies, destruction and reconstruction strategies, intelligent or dynamic parameterization approaches, intelligent termination or transitioning approaches, and seeding strategies. We chose the six areas based on our experiences in developing forest planning heuristics. These areas reflect our opinion of where future research might concentrate. All of these areas of work have the potential to enhance the capabilities and effectiveness of heuristic approaches when applied to adaptive forest management problems.
1. Introduction
In general, the concept of adaptive forest management allows forest managers and landowners to adjust their approaches to the management of forest resources through information obtained via monitoring programs (system reactions) regarding the capacity of a forest to react to activities and events [1,2]. Adaptive forest management processes can therefore be developed to address uncertainties facing the management of forests and associated natural resources, and to evaluate trade-offs among competing management strategies [3]. Strategies, as portrayed through forest plans, can be updated with various mathematical approaches at a frequency of one year or so to address learnings and to adapt to uncertain situations. This is the standard operating procedure for many companies in North America and elsewhere, but may represent a process change for public agencies that have a planning cycle of five or ten (or longer) years between the development of plans. Many very interesting problems in modern conservation of landscapes and adaptive forest management can be difficult to represent as linear integer programming problems due either to the spatial nature of the issue or to complex evaluation processes that link proposed activities to measureable outcomes, which we refer to as functional relationships. Some examples of spatial problems addressed today include the management green-up and adjacency issues surrounding the planning of final harvests, the development and maintenance of interior forest conservation areas, and the location and maintenance of habitat corridors. The latter two of these can be modeled as a shifting mosaic of connected older forests [4], while the former can be modeled as a shifting mosaic of early seral stage forests. These problems are inherently nonlinear, yet can be represented mathematically with integer programming relationships in either approximate or exact methods; however, their solution may require heuristic techniques. When functional relationships representing the manner in which landscape outcomes respond to proposed management activities are complex, we may be incapable of describing them in the linear equation form necessary of exact methods. However, in some cases functional relationships between proposed activities and measureable outcomes can be simplified to ensure that we can describe them in the equation form necessary of exact methods. Perhaps some of these problems may be reformulated, as quadric or second order cone problems (SOCM) [5], that relax or partition some constraints and allow optimality to be achieved. We believe additional work can be conducted to determine differences between solving these reformulated problems optimally when compared to results from heuristics with unknown solution quality. In general, we believe that heuristic methods facilitate the ability to more closely represent a complex problem, as complex logic can be accommodated (e.g., [6,7]). Yet this trade-off requires consideration on the part of the planner and manager, since a decision must be made: solve the incorrect problem optimally, or solve the correct problem sub optimally. We therefore believe that heuristics are of value in solving forest management problems due to their flexibility for addressing large, often nonlinear and integer problems. However, they do require additional energy to design and to identify the appropriate operating parameters.
There are two general forms of heuristic methods: s-metaheuristics and p-metaheuristics. When only one solution (forest plan) is being developed mathematically, and transformed by way of various stochastic or deterministic processes, the process is classified as an s-metaheuristic [8], point-based, or trajectory-based [9] method. When more than one solution is being transformed by various processes, evolutionary in nature or otherwise, the process is classified as a p-metaheuristic, or population-based method. One can imagine that a process can involve either or both of these for the development of a forest plan. In either case, appropriately designed heuristics have the ability to represent complex functional relationships between human and natural activities and the outcomes of desire to society (economic, ecological, and social). This characteristic is not unique to heuristic methods, as some traditional mathematical methods may also be conditioned to address difficult problems.
Our experiences over the last 30 years have been rewarding, yet have challenged our analytical and professional skills. We have encountered biases against and misunderstandings of our work through the peer-review process, yet we persevered because advances, however small, may still be of value to society. We continue to believe that any problem that can be quantifiably described, even through extremely complex procedures (see [7]), can be addressed using a heuristic. A heuristic exploration for a solution, whether it leads to a provable optimal solution or not, allows a forest planner to explore a range of solutions to complex problems. Additionally, the development of Geographic Information Systems (GIS) databases facilitates the collection and maintenance of fine-scale data. Recent LiDAR developments may now allow one to obtain tree-level resolution of forest data, and promote the ability to automatically create stand maps. However, the size of the problems to be solved may increase with the ability to develop dynamic groups of trees, when previously we were limited to predetermined stand units. The future planning environment (larger problems, nonlinear in nature) may require a decision framework that allows for simulation of stochastic events, quickly solving problems and displaying results in GIS, and allowing increased involvement of the decision maker in formulating and accepting the final solution. A heuristic can therefore be viewed as a tool to support the decision maker though the rapid creation and display of a number of solutions.
2. Recommendations
Potential areas of future work require someone interested in this area of research to be a prospector in scientific endeavors, and be able to understand how heuristics and people behave when solving problems. As with other fields, hypotheses and lines of inquiry can lead nowhere, and one would need to understand that measures of success may be difficult to achieve. However, there seem to be open avenues of inquiry regarding the ability of heuristics to solve various problems. Further, the value of a certain heuristic search process may vary depending on the status of the search (beginning, middle or end). From our experiences in publishing work in this area over the last two decades, we suggest that people new to the field be resilient enough to withstand criticism in the peer review process (e.g., for not focusing their efforts on problems with a known optimal solution), and be open to the pursuit of new ideas. Reviewers can be resistant to investigations into problems that otherwise are being addressed through the development of other standard methods, for reasons beyond speculation here.
2.1. Process Improvements to s-Metaheuristics
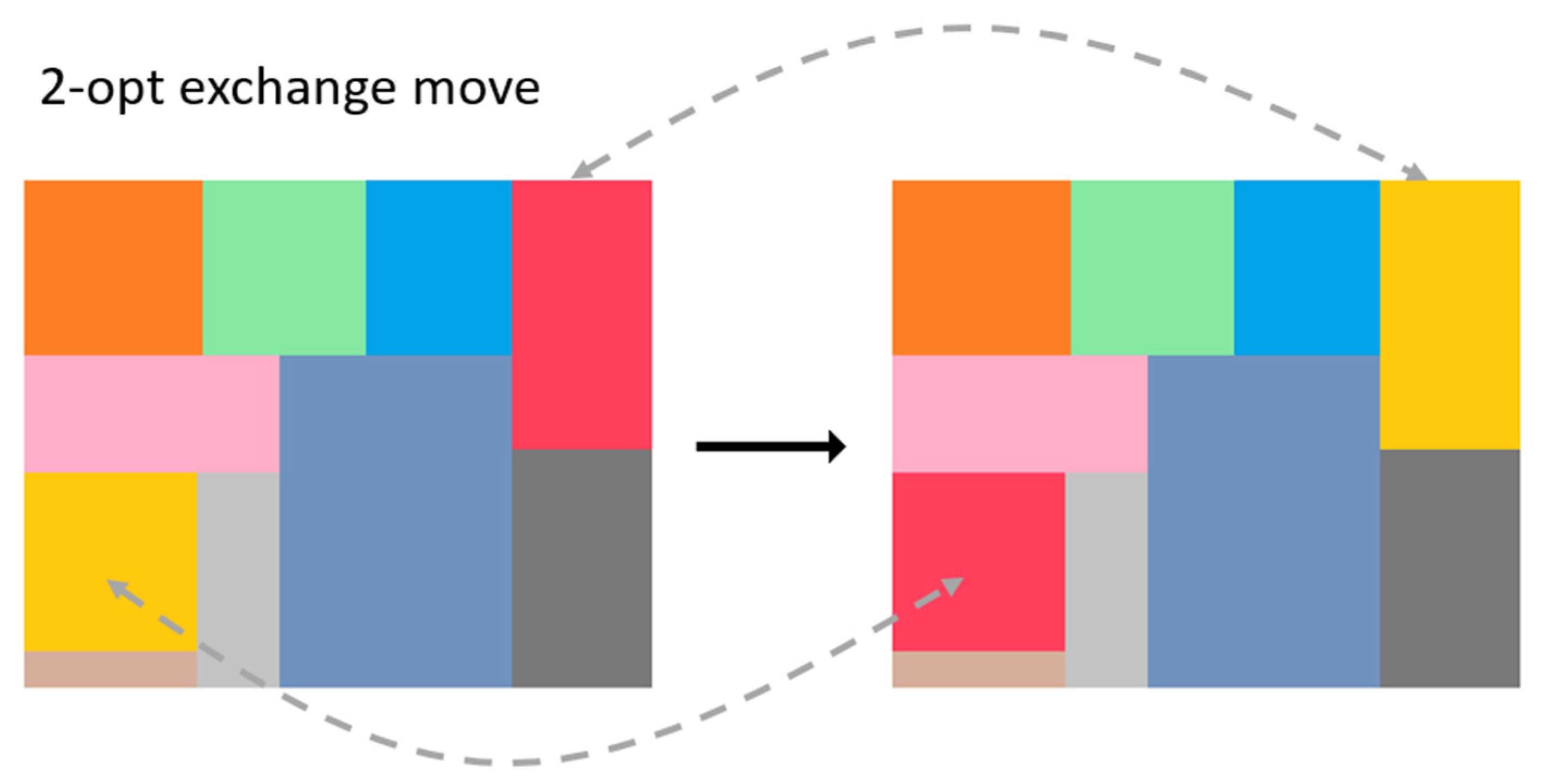
As a heuristic process navigates through a solution space, assessing new combinations of assignments for potential improvements to an objective function, the type of move or change can be important. For example, prior research has shown that while basic 1-opt moves associated with standard s-metaheuristics can lead to good quality solutions to forest planning problems, greater improvements in solution quality can be obtained with 2-opt (Figure 1), 3-opt, or greater moves [10,11,12,13,14]. Improvements in solution quality using 2-opt moves have been noted in other fields as well, such as the mining [15] and airline [16] industries. The results of these works [10,11,12,13,14] form concrete recommendations for s-metaheuristics; however, some investigation into the timing, during the navigation through a solution space, to adopt these search methods (e.g., 2-opt change or 2-opt exchange) still seems necessary. Exchange strategies swap the assignment of activities between n management units (or roads, etc.) in one simultaneous effort. Change strategies simply change the assignment of n management units or roads in one simultaneous effort. Evidence suggests that for problems containing periodic wood flow constraints, schedules of activities can be rearranged using 2-opt moves so that deviations in wood flow can be minimized, perhaps resulting in a modest improvement in an objective function value [10].
While n-opt change strategies can be employed without any other assistance, n-opt exchange strategies need additional assistance to interject diversity into the assignment of activities of a solution. The frequency and amount of these types of moves or changes should be further researched to understand how they can be more effectively included in a process that is computationally demanding when spatial constraints are involved. Thus, there is an opportunity to align these search strategies with the structure of the problem, such as the density or sparseness of the problem. Another area of work may involve the modification of stochastic methods typically employed away from uniform random distributions which often drive the selection of random components, and toward skewed, or biased randomization procedures. In these cases, the probability values employed to select candidate moves within an s-metaheuristic can be intentionally biased based on a set of priorities defined a priori. Recent work [17] suggests that this could be a potential area of future research for those who employ s-metaheuristics. Although biasing a search is not necessarily a new concept in the broader field of operations research, adjustments to the stochastic selection criteria association with the allocation of forest management activities have likely received little attention.
2.2. Search Reversion Strategies
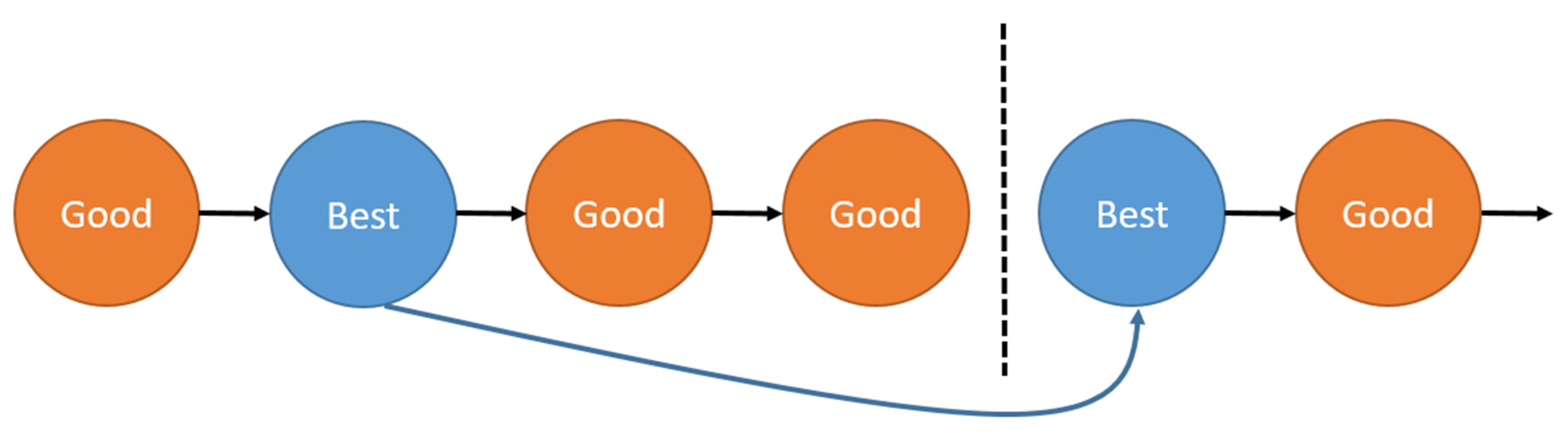
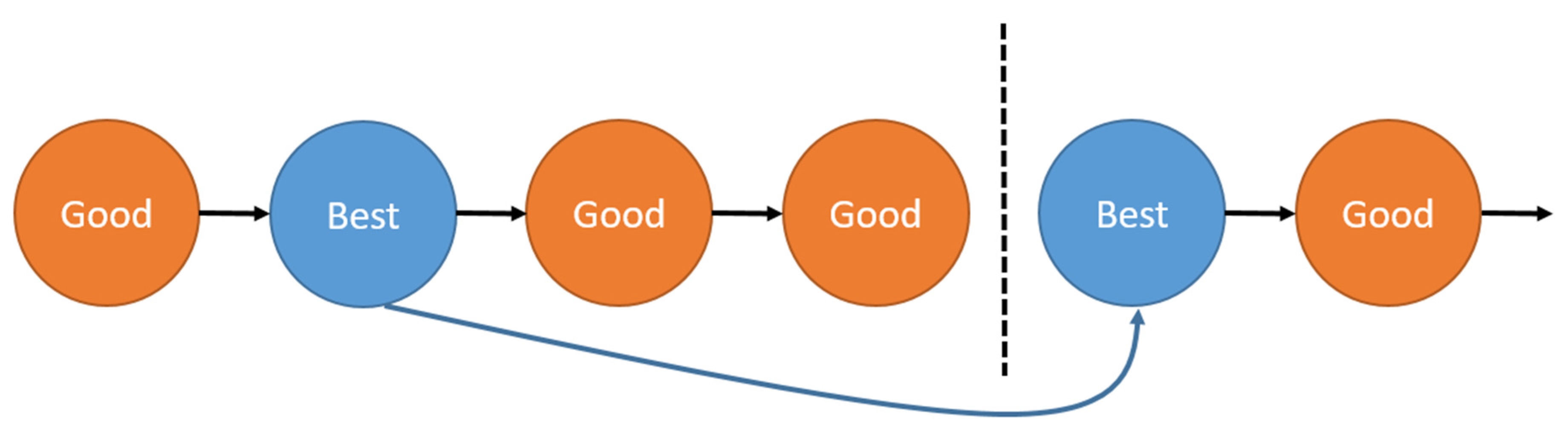
Some forms of heuristic search are representative of Markov chains [18], where the probability of the next state of a system (the next forest plan to be developed in the context of a search for the global optimum) is a function only of the current state (current plan). This strict rule for categorizing heuristic searches as Markov chains does seem to fail with heuristics that use deterministic rules. Within tabu search, for example, the move made during one iteration of the search is the one that leads to the best improvement (or least deterioration) in value over the current solution. Regardless, within an s-metaheuristic, a single feasible solution is adjusted through the changes or exchanges of activities among management units. Each change or exchange is viewed as an iteration of the search process. These operations result in the current solution to the problem. If the current solution is feasible and of greater quality than the best solution stored in memory, it simultaneously becomes both. However, given the intricacies of heuristic search process, the quality of the current solution maintained during the process will likely deviate from the best solution. With search reversion (Figure 2), after m iterations have occurred, the search process stops, interrupting the so-called Markov chain, and the best solution contained in the memory of the process replaces the current solution. The search process then begins again from this point. Within the forestry literature, evidence suggests that for problems containing periodic wood flow and harvest adjacency constraints, schedules of activities can be rearranged using search reversion so that significant improvements in objective function values can be obtained [19]. This strategy has been shown to produce better tabu search and threshold accepting results, in nearly every instance, than search strategies that lack a reversion process [19,20]. Therefore, these published results provide a concrete recommendation for s-metaheuristics: utilization of a reversion strategy seems necessary. However, an open area of research seems to involve investigation into the rate of reversion during a heuristic search, as prior research [19,20] is somewhat inconsistent in this regard. Further, an open area of research would also seem to involve investigation into whether the reversion process should be employed with a systematic or random rate of occurrence.
2.3. Search Destruction and Reconstruction Strategies
An open area of research for forest planning heuristics may involve the design of destruction and reconstruction search strategies. In general, some of these processes can be considered repair strategies [8]. One form of repair strategy was employed in the raindrop method designed to address the green-up and adjacency problem in forestry [21,22]. However, other methods have been proposed that may be of value in redirecting a heuristic search away from local optima and toward other unexplored or more valuable areas of the solution space. Types of methods for destructing or ruining a solution during the operation of a heuristic include random, sequential or systematic, or geographic, the latter of which may make more sense for landscape-level activity allocation problems. For example, a process whereby a feasible solution would be disrupted with the removal of all choices physically (geographically) within a search radius of a randomly located point was proposed [23]. The method seemed to work very well for the travelling salesman problem, and was recommended as an all-purpose strategy for a heuristic search process. Reconstruction processes can be composed of various random, greedy, or otherwise deterministic approaches that maintain feasibility. Random selection of the pieces of a solution to de-schedule, then re-schedule using a greedy process was recently demonstrated for a p-metaheuristic [24]. Although more likely of value to p-metaheuristics, opposition-based metaheuristics that examine both a current solution and its theoretical opposite may be useful in increasing the speed of convergence by improving coverage of a solution space [25]. In the case of s-metaheuristics, this may involve an interruption to the Markov chain, as in the case of search reversion, and a transition to a solution that could be viewed as one that was destructed and reconstructed (forming the opposite). The ejection chains described in [26] for traveling salesman problems may also be of value to forestry s-metaheuristic search processes. While destruction and reconstruction strategies have been incorporated into one forest planning heuristic [21], direct concrete examples of the potential of these strategies to benefit s-metaheuristics such as tabu search and simulated annealing are lacking at this time. Therefore, as we described in the opening sentence of this section, we see this as an open area for future research endeavors.
2.4. Intelligent and Dynamic Parameterization of a Search Process
Prior to the initialization of a heuristic search process, parameters (rules) need to be defined. Each heuristic requires from one to several parameters that influence how a search proceeds. The effectiveness of some heuristics can be very sensitive to the parameter settings [27]. Often, through systematic trials and subsequent statistical analyses that illustrate the potential quality of outcomes, a satisfactory set of parameters is selected (i.e., the parameters are tuned) for the problem to be solved [28]. Hopefully, the parameters are chosen appropriately, but as they are sensitive to the problem size and type, results can vary from one problem to the next as conditions change. One of the common assaults made toward heuristics is that the stated solution time should include the time to parameterize the search strategy. Thus by allowing a heuristic to select the initial values of search parameters, this concern might be mitigated. Therefore, a future area of research involves the dynamic parameterization of a search process based on mathematical rules or features of the problems rather than human interaction. Some work in this area has been attempted [29], through the selection of the initial threshold level within threshold accepting (similar to the initial temperature within simulated annealing). Results are preliminary and unpublished but indicate that high-quality results may be obtained when basing heuristic parameters on characteristics of the problem being solved (number of decision variables, objective function value of a random or pseudo-random solution, etc.).
Demonstrated in earlier published work [30], logical processes might also be devised to optimize the parameter set. In essence, one would perform one type of optimization process in order to select the parameters to employ, then use those parameters in a second optimization process to solve the problem of interest. Time-varying strategies, those that modify the parameter set based on the amount of progress (e.g., iteration number) made during the search, may also be useful in improving the convergence toward an optimal solution [31]. Further, there likely is a need to adjust the parameters in a self-adaptive nature during a search process to adequately conduct a search as the behavior of the search changes. For example it was once suggested [6] that tabu search demonstrates three distinct phases within a single search for the global optimum solution to a problem: hill climbing, adjustment, and fine-tuning. Adaptive modifications to search parameters, based on knowledge gained through monitoring the behavior of the search, may therefore be useful in efforts to locate high-quality solutions [31] and capitalize on the behavior of the search. Perhaps there are investigations that could be conducted to further determine whether dynamic parameterization, based on the elements of the problem structure, could be developed to promote the use of these techniques to solve forest management problems. At present, we offer no concrete recommendation on how to improve the search behavior of an s-metaheuristic as these areas of investigation need further attention.
2.5. Intelligent Termination or Integration Criteria for a Search Process
Often, the rule used when employing a heuristic to develop a forest plan is to let it operate until some pre-defined event has passed. For example, when using tabu search, the process would continue until the pre-defined number of iterations has passed. When using simulated annealing, the search process would continue until the temperature cooled below some pre-defined assumed value. When using threshold accepting, the search process would continue until the threshold contracted below some pre-defined assumed value. These are arbitrary assumptions and often are defined in a manner (like with the search parameters) using experience gained from early trials of the process. In order to avoid wasting time, search processes may need to terminate earlier than planned. In fact, a heuristic might be terminated when (a) it senses that it has become trapped in a local optima, (b) little improvement in solution quality has been detected over a certain amount of processing time, or (c) there is a high probability that the best solution it has located is near the global optimum [32]. In these cases, gains from additional search can be computationally expensive, and therefore an early termination decision might take these conditions into account. Alternatively, a search process may need to continue beyond the planned length (or time) when new information is periodically located (new local optima found).
Along these lines, a method can be developed whereby a heuristic terminates after a maximum number of iterations without substantial improvement in the objective function value [15]; although substantial improvement would need to be defined. Similarly, assessments of solution quality can be monitored, and the time required to obtain improvements can be estimated [33]. Various types of convergence analyses can be examined, for example linear regression can be applied to the best solution values (the independent variable) associated with the set of the last n iterations of a model (the dependent variable) to determine whether a significant slope exists; if a slope exists in the data, further improvements might be possible. In a forestry example, cubic splines were fitted to the objective function values of the last n iterations of a model while the model was operating, and the first derivative (i.e., slope) of the line was used to determine whether to terminate one type of heuristic and initiate another [34]. Small, positive derivatives were indicative of slow and weak searches, while large positive derivatives were indicative of fast and strong searches. A negative derivative indicated that the search was not providing improvements. For this issue, further investigations may be necessary to adapt a heuristic search to conditions observed, to more soundly recommend efficient methods that will be appropriate for reacting to stalled searches or late opportunistic improvements in solution quality. A complementary, potential area of work may be to exploit multiple processor capabilities of some computer systems, enabling one computer to perform the search and another to simultaneously analyze the results and provide feedback to better guide algorithm performance. Given the amount of computer programming effort necessary to monitor these conditions, at this time we offer no concrete recommendations for improving the search behavior of an s-metaheuristic. Intelligent stopping or integration criteria both seem to need further attention before a sound recommendation can be made to employ these over pre-defined termination criteria.
2.6. Seeding the Search with a High-Quality Solution
General acceptance of the notion that heuristic planning processes should initiate from a random point in a solution space was formalized over three decades ago (e.g., [35,36]). This guidance has been followed closely by researchers under the assumption that independently generated solutions (forest plans) that used the same heuristic parameter set could be viewed as independent samples from a large population of potential samples. Under this assumption, sample statistics can be employed to describe measures of central tendency, variation, and shape of the distribution of samples (multiple runs of the model). These characteristics of the outcomes can then be used to infer aspects of quality upon the process. However, in practice, the point of initiation of a heuristic has been questioned. The fact that it could be comprised of a high-quality seed makes sense to some practitioners. Yet in some cases developing a high-quality seed can be computationally cumbersome. Nevertheless, in the quest to improve overall performance of a search strategy, one might initiate a search process from a position at (or nearby) a local optima [37] or somewhere near the center point of the solution space [38], however this is defined. Given a starting position of higher quality, seeding strategies may result in shorter computational time requirements [39]. In one forestry example, the conversion of a relaxed linear programming solution to a feasible mixed integer solution (where green-up and adjacency constraints were not violated) was illustrated in 18 different ways [20]. When applied to two different problems, no consensus was achieved for the selection of one of these conversion tactics, and it further seemed that the selection of tactic would depend on the type of problem being solved. Therefore, we offer no concrete recommendation at this time for improving an s-metaheuristic search process using high-quality seeds. More investigation into this approach seems necessary before we can firmly conclude that seeding a heuristic with a high-quality initial solution should be a required component of a robust search process.
3. Discussion
When this general topic was presented at the IUFRO 125th Anniversary Congress in Freiburg, Germany, we posed three final questions for the audience. First we asked, as a collection of professionals pursuing this work, should we continue? This was a difficult question to ask of the audience, some of whom were interested in mathematical programming approaches to adaptive forest management problems. It was not posed by us as a white flag, indicating our failure to succeed in this area, but more as a hypothetical question seeking broad, general direction. Some of the participants of the conference positively responded to the question. In a general sense, it was concluded that exploration into alternative means for solving complex problems should continue along many different lines to potentially benefit society. In response to this, where would we go? was the second question posed. Audience members suggested that one direction of future work might be to integrate heuristics with machine learning and other artificial intelligence methods. Through the information gathered and generated by these computational methods, assistance may be provided to a heuristic search process through the dynamic tuning of parameters and through a reduction in the solution space searched [40]. Efforts along these lines may be of benefit to the suggestions we posed for future research in Section 2.4. Finally, with respect to the collection of publishable works on the use of heuristics to address adaptive forest management issues, we asked what is the benefit? In essence, we were asking whether heuristics were necessary today for forest planning efforts. Discussion with the audience suggested that some common forest management scheduling and allocation problems (harvest scheduling) can be addressed successfully and efficiently with exact methods that are well known (linear programming, mixed integer programming, goal programming) given advances in technology over the last two decades. However, some problems cannot be formulated for exact methods. One may attempt to reduce the complexity of a problem by limiting or combining the decision variables into cliques for example, in order to make the problem tractable with an exact algorithm. Fewer decision variables likely leads to fewer spatial relationships that need to be recognized, yet the level of detail recognized may not be what a decision maker desires. These are difficult organizational compromises for the planner and decision-maker alike. Similarly, one might reduce the complexity of the functional relationships within a model. Converting a non-linear relationship between forest density and wildlife habitat to a linear relationship is one example. In doing so, the functional relationships between activities and outcomes are changed to allow them to be described within exact methods. These may involve the use of quadric or SOCM methods we alluded to in the Introduction that relax or partition some constraints and allow the problems to be solved optimally. However, these compromises may also not be what the planner and decision-maker desire, as they may not be defendable.
Ultimately, a successful heuristic search process that addresses adaptive forest management problems would need to balance exploration and exploitation (diversification and intensification) in search of the optimal solution. This type of algorithm may contain complex computer programming code, and preclude the use of it by others. In our associations with consultants, managers, and planners (public and private), we have found that most want a scheduling system that is easy to use with limited technical assistance. In reality, the spectrum of capabilities among analysts varies considerably, and each person’s impression of easy depends on that person’s background and training. Some companies and organizations have had some success in developing customized harvest scheduling software, yet aside from a few moderately successful examples, a purely heuristic software solution is still elusive. Consultants, managers, and planners also need to be able to understand and interpret the results provided by a heuristic. Given the stochastic nature of some search processes, the plans developed may not necessarily be the same each time a model is operated, and this is a source of concern to these people. We may be headed for an environment where (a) specialists operate the software and provide the consultants, managers, and planners the results, and perhaps (b) the consultants, managers, and planners operate the software with limited understanding of what it is doing. This seems similar to the environment of the 1990s, when geographic information systems were the new software of interest to forestry organizations. In those times, specialists were mainly designated to make the maps requested by the land managers (and others), yet through advancements in the usability of software, land managers became empowered to address their own needs. Perhaps, as in this case, the evolution of our profession may allow the development of distributed systems, as was the case of geographic information systems [41]. While it would naturally be beneficial to planning processes to be able to assess as closely as possible policies (e.g., harvest adjacency) and environmental considerations, the dynamic nature of analysis windows or timelines may both preclude the contracting of specialists and limit the information used in making decisions [42]. Finally, finite windows of opportunity may also be associated with forest certification processes (audits, recertification, etc.), which may preclude the use or employment of methods that require extensive amounts of time to learn or develop.
4. Conclusions
Advances in computational methods that involve the use of metaheuristics for the development of forest plans can still be made by motivated individuals (or groups) who can identify the untested gaps in science and design tests that address important hypotheses. In this opinion paper, we have offered two concrete recommendations (n-opt moves and search reversion) that can improve the quality of results obtained through s-metaheuristics. We have also offered our opinion of several areas of research (involving parameterization, termination criteria, seeding and others) that may offer further improvements to s-metaheuristics if they can be reasonably deployed. As with other fields of research (e.g., testing global positioning systems in forests), our area of research has evolved from observational studies (here it is) to hypothesis-driven studies (this is why). However, we envision new observational studies that illustrate major breakthroughs without having to test any hypothesis other than this method may be better. These advances, yet to be discovered, are waiting for dedicated analysts.
Acknowledgments
This work was supported by the U.S. Department of Agriculture, National Institute of Food and Agriculture, McIntire-Stennis project 1012166, administered by the University of Georgia.
Author Contributions
P.B. and K.B. conceived and designed this commentary, and both wrote the paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Bettinger, P.; Boston, K.; Siry, J.P.; Grebner, D.L. Forest Management and Planning, 2nd ed.; Academic Press: New York, NY, USA, 2017; ISBN 978-0-128-09476-1. [Google Scholar]
- Nocentini, S.; Buttoud, G.; Ciancio, O.; Corona, P. Managing forests in a changing world: The need for a systemic approach: A review. For. Syst. 2017, 26. [Google Scholar] [CrossRef]
- Reyer, C.P.O.; Bugmann, H.; Nabuurs, G.-J.; Hanewinkel, M. Models for adaptive forest management. Reg. Environ. Chang. 2015, 15, 1483–1487. [Google Scholar] [CrossRef]
- Boston, K.; Sessions, J. Development of a spatial harvest scheduling system to promote the conservation between indigenous and exotic forests. Int. For. Rev. 2006, 8, 297–306. [Google Scholar] [CrossRef]
- Ding, T.; Sun, K.; Yang, Q.; Khan, A.W.; Bie, Z. Mixed integer second order cone relaxation with dynamic simulation for proper power system islanding operations. IEEE J. Emerg. Sel. Top. C 2017, 7, 295–306. [Google Scholar] [CrossRef]
- Bettinger, P.; Sessions, J.; Boston, K. Using Tabu search to schedule timber harvests subject to spatial wildlife goals for big game. Ecol. Model. 1997, 94, 111–123. [Google Scholar] [CrossRef]
- Bettinger, P.; Sessions, J.; Johnson, K.N. Ensuring the compatibility of aquatic habitat and commodity production goals in eastern Oregon with a Tabu search procedure. For. Sci. 1998, 44, 96–112. [Google Scholar]
- Talbi, E.-G. Metaheuristics: From Design to Implementation; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2009; ISBN 978-0-470-27858-1. [Google Scholar]
- De León-Aldaco, S.E.; Calleja, H.; Alquicira, J.A. Metaheuristic optimization methods applied to power converters: A review. IEEE Trans. Power Electr. 2015, 30, 6791–6803. [Google Scholar] [CrossRef]
- Bettinger, P.; Boston, K.; Sessions, J. Intensifying a heuristic forest harvest scheduling search procedure with 2-opt decision choices. Can. J. For. Res. 1999, 29, 1784–1792. [Google Scholar] [CrossRef]
- Heinonen, T.; Pukkala, T. A comparison of one- and two-compartment neighbourhoods in heuristic search with spatial forest management goals. Silva Fenn. 2004, 38, 319–332. [Google Scholar] [CrossRef]
- Dong, L.; Bettinger, P.; Liu, Z.; Qin, H. A comparison of a neighborhood search technique for forest spatial harvest scheduling problems: A case study of the simulated annealing algorithm. For. Ecol. Manag. 2015, 356, 124–135. [Google Scholar] [CrossRef]
- Bachmatiuk, J.; Garcia-Gonzalo, J.; Borges, J.G. Analysis of the performance of different implementations of a heuristic method to optimize forest harvest scheduling. Silva Fenn. 2015, 49. [Google Scholar] [CrossRef]
- Glover, F. Finding a best traveling salesman 4-opt move in the same time as a best 2-opt move. J. Heuristics 1996, 2, 169–179. [Google Scholar] [CrossRef]
- Montiel, L.; Dimitrakopoulos, R. A heuristic approach for the stochastic optimization of mine production schedules. J. Heuristics 2017, 23, 397–415. [Google Scholar] [CrossRef]
- Ding, H.; Lim, A.; Rodrigues, B.; Zhu, Y. New heuristics for over-constrained flight to gate assignments. J. Oper. Res. Soc. 2004, 55, 760–768. [Google Scholar] [CrossRef]
- Grasas, A.; Juan, A.A.; Faulin, J.; de Armas, J.; Ramalhinho, H. Biased randomization of heuristics using skewed probability distributions: A survey and some applications. Comput. Ind. Eng. 2017, 110, 216–228. [Google Scholar] [CrossRef]
- López, C.L. Heuristics as Markov chains. Ann. Math. Artif. Intell. 2015, 73, 275–309. [Google Scholar] [CrossRef]
- Bettinger, P.; Demirci, M.; Boston, K. Search reversion within s-metaheuristics: Impacts illustrated with a forest planning problem. Silva Fenn. 2015, 49. [Google Scholar] [CrossRef]
- Akbulut, R.; Bettinger, P.; Ucar, Z.; Obata, S.; Boston, K.; Siry, J. Spatial forest plan development using heuristic processes seeded with a relaxed linear programming solution. For. Sci. 2017, 63, 518–528. [Google Scholar] [CrossRef]
- Bettinger, P.; Zhu, J. A new heuristic for solving spatially constrained forest planning problems based on mitigation of infeasibilities radiating outward from a forced choice. Silva Fenn. 2006, 40, 315–333. [Google Scholar] [CrossRef]
- Zhu, J.; Bettinger, P.; Li, R. Additional insight into the performance of a new heuristic for solving spatially constrained forest planning problems. Silva Fenn. 2007, 41, 687–698. [Google Scholar] [CrossRef]
- Schrimpf, G.; Schneider, J.; Stamm-Wilbrandt, H.; Dueck, G. Record breaking optimization results using the ruin and recreate principle. J. Comput. Phys. 2000, 159, 139–171. [Google Scholar] [CrossRef]
- Lozano, M.; García-Martínez, C.; Rodríguez, F.J.; Trujillo, H.M. Optimizing network attacks by artificial bee colony. Inf. Sci. 2017, 377, 30–50. [Google Scholar] [CrossRef]
- Rojas-Morales, N.; Riff Rojas, M.-C.; Ureta, E.M. A survey and classification of opposition-based metaheuristics. Comput. Ind. Eng. 2017, 110, 424–435. [Google Scholar] [CrossRef]
- Glover, F. Ejection chains, reference structures and alternating path methods for traveling salesman problems. Discret. Appl. Math. 1996, 65, 223–253. [Google Scholar] [CrossRef]
- Derigs, U.; Vogel, U. Experience with a framework for developing heuristics for solving rich vehicle routing problems. J. Heuristics 2014, 20, 75–106. [Google Scholar] [CrossRef]
- Almeida, F.; Giménez, D.; López-Espín, J.J.; Pérez-Pérez, M. Parameterized schemes of metaheuristics: Basic ideas and applications with genetic algorithms, scatter search, and GRASP. IEEE Trans. Syst. Man Cybern. A 2013, 43, 570–586. [Google Scholar] [CrossRef]
- Bettinger, P. SOFIE (Scheduling of Forest Investment Endeavors), Version 1.0. U.S. Copyright Registration Number TXu 2-008-943. 20 June 2016. [Google Scholar]
- Pukkala, T.; Heinonen, T. Optimizing heuristic search in forest planning. Nonlinear Anal. Real World Appl. 2006, 7, 1284–1297. [Google Scholar] [CrossRef]
- Nickabadi, A.; Ebadzadeh, M.M.; Safabakhsh, R. A novel particle swarm optimization algorithm with adaptive inertial weight. Appl. Soft Comput. 2011, 11, 3658–3670. [Google Scholar] [CrossRef]
- Zabinsky, Z.B.; Bulger, D.; Khompatraporn, C. Stopping and restarting strategy for stochastic sequential search in global optimization. J. Glob. Optim. 2010, 46, 273–286. [Google Scholar] [CrossRef]
- Ribeiro, C.C.; Rosseti, I.; Souza, R.C. Probabilistic stopping rules for GRASP heuristics and extensions. Int. Trans. Oper. Res. 2013, 20, 301–323. [Google Scholar] [CrossRef]
- Li, R.; Bettinger, P.; Boston, K. Informed development of meta heuristics for spatial forest planning problems. Open Oper. Res. J. 2010, 4, 1–11. [Google Scholar] [CrossRef]
- Golden, B.L.; Alt, F.B. Interval estimation of a global optimum for large combinatorial problems. Nav. Res. Logist. Q. 1979, 26, 69–77. [Google Scholar] [CrossRef]
- Los, M.; Lardinois, C. Combinatorial programming, statistical optimization and the optimal transportation network problem. Transp. Res. B-Meth. 1982, 16, 89–124. [Google Scholar] [CrossRef]
- Rojas, J.M.; Fraser, G.; Arcuri, A. Seeding strategies in search-based unit test generation. Softw. Test. Verif. Reliab. 2016, 26, 366–401. [Google Scholar] [CrossRef]
- Esmailzadeh, A.; Rahnamayan, S. Center-point-based simulated annealing. In Proceedings of the 25th IEEE Canadian Conference on Electrical and Computer Engineering, Montreal, QC, Canada, 29 April–2 May 2012; Institute of Electrical and Electronics Engineers: New York, NY, USA, 2012; pp. 1–4. [Google Scholar] [CrossRef]
- Manfrini, F.A.L.; Bernardino, H.S.; Barbosa, H.J.C. On heuristics for seeding the initial population of Cartesian genetic programming applied to combinational logic circuits. In Proceedings of the 2016 Conference on Genetic and Evolutionary Computation Conference Companion, Denver, CO, USA, 20–24 July 2016; Association of Computing Machinery: New York, NY, USA, 2016; pp. 105–106. [Google Scholar] [CrossRef]
- Calvet, L.; de Armas, J.; Masip, D.; Juan, A.A. Learnheuristics: hybridizing metaheuristics with machine learning for optimization with dynamic inputs. Open Math. 2017, 15, 261–280. [Google Scholar] [CrossRef]
- Bettinger, P. Distributing geographic information systems capabilities to field offices: Benefits and challenges. J. Forest. 1999, 97, 22–26. [Google Scholar]
- Bettinger, P.; Boston, K. A conceptual model for describing decision-making situations in integrated natural resource planning and modeling projects. Environ. Manag. 2001, 28, 1–7. [Google Scholar] [CrossRef]
Figure 1.
Conceptual representation of 2-opt exchange moves.
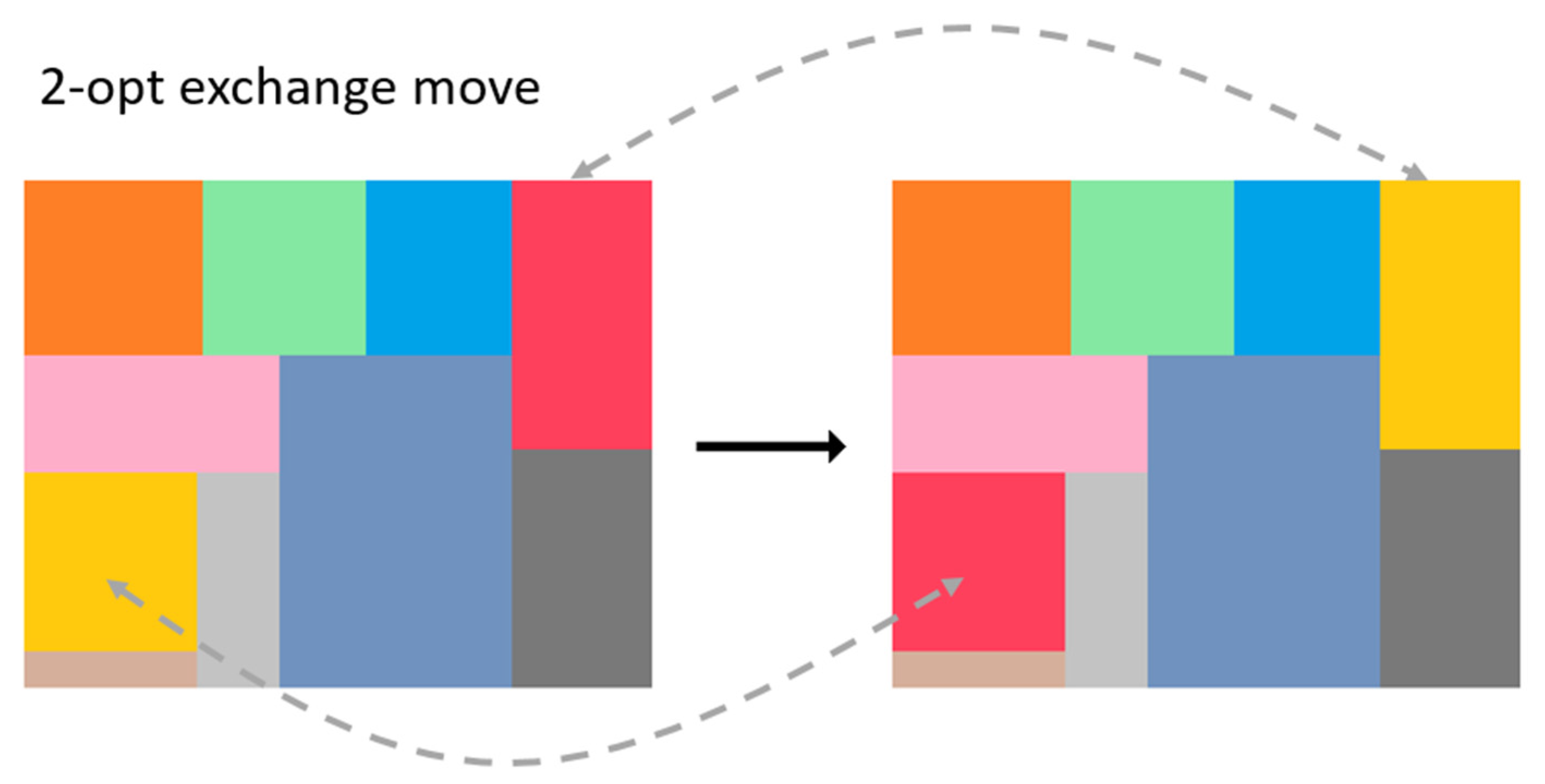
Figure 2.
Conceptual model of a reversion strategy during a heuristic search process.
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Bettinger, P.; Boston, K. Forest Planning Heuristics—Current Recommendations and Research Opportunities for s-Metaheuristics. Forests 2017, 8, 476. https://doi.org/10.3390/f8120476
AMA Style
Bettinger P, Boston K. Forest Planning Heuristics—Current Recommendations and Research Opportunities for s-Metaheuristics. Forests. 2017; 8(12):476. https://doi.org/10.3390/f8120476
Chicago/Turabian StyleBettinger, Pete, and Kevin Boston. 2017. "Forest Planning Heuristics—Current Recommendations and Research Opportunities for s-Metaheuristics" Forests 8, no. 12: 476. https://doi.org/10.3390/f8120476
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.