Disruption Management for the Real-Time Home Caregiver Scheduling and Routing Problem

Department of Industrial Engineering & Management, Shanghai Jiao Tong University, Shanghai 200240, China
*
Author to whom correspondence should be addressed.
Sustainability 2017, 9(12), 2178; https://doi.org/10.3390/su9122178
Submission received: 5 October 2017
/
Revised: 4 November 2017
/
Accepted: 24 November 2017
/
Published: 25 November 2017
(This article belongs to the Section Economic and Business Aspects of Sustainability)
Abstract
:The aggravating trend of the aging population, the miniaturization of the family structure, and the increase of families with empty nesters greatly affect the sustainable development of the national economy and social old-age security system of China. The emergence of home health care or home care (HHC/HC) service mode provides an alternative for elderly care. How to develop and apply this new mobile service mode is crucial for the government. Therefore, the pertinent optimization problems regarding HHC/HC have constantly attracted the attention of researchers. Unexpected events, such as new requests of customers, cancellations of customers’ services, and changes of customers’ time windows, may occur during the process of executing an a priori visiting plan. These events may sometimes make the original plan non-optimal or even infeasible. To cope with this situation, we introduce disruption management to the real-time home caregiver scheduling and routing problem. The deviation measurements on customers, caregivers, and companies are first defined. A mathematical model that minimizes the weighted sum of deviation measurements is then constructed. Next, a tabu search (TS) heuristic is developed to efficiently solve the problem, and a cost recorded mechanism is used to strengthen the performance. Finally, by performing computational experiments on three real-life instances, the effectiveness of the TS heuristic is tested, and the advantages of disruption management are analyzed.
1. Introduction
The fifth overall population census of China indicates that in 2000, the population aged over 60 years old reached 129.0 million, accounting for 10.45% of the total population; in addition, the population aged over 65 years old reached 88.0 million, or 6.96% of the total population [1]. A country or region becomes an aging society when the proportion of the population aged over 60 or 65 years old is greater than 10.0% or 7.0%, respectively. By this definition, China has become an aging society since 2000. According to the sixth overall population census of China, the population aged over 60 years old reached 178.0 million in 2010, accounting for 13.26% of the total population; the population aged over 65 years old reached 119.0 million, or 8.87% of the total population [2]. These increasing figures prove that the aging of China’s population is accelerating.
Since the now-famous one-child policy of China has been implemented in late 1970s, the average size of families decreased from 4.41 in the third census [3] to 3.10 in the sixth census [2]. The number of adults without siblings increased considerably. The demographic structure of most families shows a “4-2-1” inverted pyramid, which consists of four elderly parents, two adults without siblings, and one young child. Obviously, no sibling can help adults in providing support for their elderly parents, suggesting that increased time and effort are required, and the family pension function is weakened. In addition, migrant workers leave their elderly parents and young children in their hometowns to work in other cities. These elderly parents are called “empty nesters”. According to the statistics from the Ministry of Civil Affairs of China in 2010, approximately 42 million of empty nesters were aged over 65 years old [4]. The family with empty nesters has become the main family mode in most rural areas.
The demand for health care services increases sharply with the aggravating trend of the aging population, the miniaturization of the family structure, and the increase of families with empty nesters. However, the gap between the demand for care services and the capability of current medical resources in China is immense [5]. Elderly care has become a serious social issue that significantly pressures the existing social old-age security system and hinders the sustainable development of the national economy. Furthermore, in current traditional hospitalization service mode, the elderly must visit hospitals and endure a long wait before receiving services from nurses or doctors. Given that hospitals have extremely limited medical resources, this service mode is now unsuitable for the social old-age security system.
The emergence of home health care or home care (HHC/HC) service mode provides an alternative for elderly care [6]. This mobile service mode refers to the delivery of social, medical, and paramedical services to customers at their own residence. When compared with the traditional hospitalization service mode, HHC/HC features several advantages: (1) improving clinical and psychological conditions of customers in their familiar environment; (2) reducing operating cost of public health care systems, and (3) increasing utilization rate of medical resources (e.g., hospital beds). The Chinese government and related institutions (e.g., State Council and Ministry of Health) have openly and repeatedly underlined the adoption of the HHC/HC service mode to develop a new old-age security system. Therefore, the promotion of such a mobile service mode helps the government to build a sustainable society.
Caregivers constitute an important resource of HHC/HC companies. They are trained by authorized agencies and are hired by companies that look into qualifications. Their duty is to use their skills to satisfy the assigned service requests. The type of services that are performed by them ranges from cleaning to personal hygiene to simple medical treatment, which lasts from 10 to 60 min, on average. To reduce operating cost and improve service quality, the scheduling and routing of caregivers, as one of the most crucial daily decision activities in companies, must be seriously considered. Using known information about daily service requests of customers as the basis, schedulers or managers design optimal or near-optimal visiting plans for caregivers. Caregivers then travel from the HHC/HC center to serve the assigned customers according to the plan. The above design process of the visiting plan is to solve the daily home caregiver scheduling and routing problem (HCSRP). However, our survey in some HHC/HC companies reveals that unexpected events (e.g., newly occurring requests of customers, cancellations of customers’ services, and changes of customers’ time windows) may occur during the execution of the original plan. Regardless of how superior the original plan is, these events may sometimes render it non-optimal or even infeasible. Therefore, when an unexpected event occurs, schedulers or managers must consider the incorporation of this event into the unexecuted part of the original plan.
With the development of the global positioning system, geographic information systems, real-time communication technologies, and the Internet of Things [7], schedulers or managers can automatically track the location and service status of caregivers and promptly respond to unexpected events. When such an event arises, the disruption it causes must be swiftly incorporated into the original unexecuted routes of caregivers. During decision-making, new visiting routes must be generated to minimize the negative effect of unexpected events on customers, caregivers, and companies. Thereafter, this relevant optimization problem is called the real-time HCSRP (RT-HCSRP). When compared with the traditional capacitated vehicle routing problem (VRP) [8], the RT-HCSRP exhibits the following characteristics. First, minimal costs and maximal customer satisfaction are of most interest for companies [9]. During real-time scheduling, the compatibility requirements [10] between customers and caregivers that are inherited from the periodic and daily visiting plans must still be satisfied to maximize customer satisfaction. Second, in the case of an unexpected event, caregivers are in transit or at customers’ home, In the RT-HCSRP that is derived from the time of the event, instead of the HHC/HC center, caregivers depart from different locations and arrive in the HHC/HC center. Third, responding to an unexpected event timely is necessary for companies. For example, if an unplanned service request is proposed by a customer at a specific time in a day, then schedulers or managers must consider whether or not it is suitable to incorporate this request into the unexecuted part of the original plan and must reply to the customer within a reasonable time. Fourth, various objectives associated with customers, caregivers, and companies must be considered to reflect the influence of the event. Therefore, to solve the problem efficiently, this study focuses on the definition of the problem and the development of the solution approach.
The goal of the RT-HCSRP is to adjust the original schedule to minimize the negative effect of unexpected events on customers, caregivers, and companies. Such an effect can be described by the deviations between the updated and original plans. Disruption management aims to minimize the negative effect on the original plan when unexpected events occur, which has successfully addressed various optimization problems in flight scheduling, airline crew scheduling, machine scheduling, project scheduling, and other fields [11]. In this study, disruption management will also be applied to formulate the RT-HCSRP, which is called the strategy of disruption management. Therefore, the contributions of this paper are summarized as follows. First, based on the principle of such a strategy, reasonable deviation measurements are devised. Second, a tabu search (TS) heuristic enhanced by a cost record mechanism is developed to solve the RT-HCSRP. Finally, through performing experiments on three real-life instances, the advantages of the disruption management strategy are validated.
The rest of this paper is structured as follows. Section 2 reviews the literature about the HCSRP and disruption management. Section 3 introduces the RT-HCSRP. Section 4 describes a TS heuristic with a cost record mechanism for the proposed problem. Section 5 analyzes results of three real-life instances. The last section concludes the paper and presents several future research directions.
2. Literature Review
The HCSRP has been considered in the mid- (e.g., a week) or short-term (e.g., a day) planning horizons [12,13]. Therefore, this section reviews the HCSRP from two planning horizons. Because the disruption management is used to define the RT-HCSRP, this section also reviews its application in literature.
Begur et al. [14] focus on the five-day weekly nurse scheduling problem and develop a spatial decision support system that is based on some simple heuristics (e.g., the Clarke and Wright savings heuristic) to solve this problem. Nickel et al. [15] use different meta-heuristics (e.g., the adaptive large neighborhood search heuristic and the TS heuristic) integrated with methods from constraint programming to address the weekly HCSRP that takes the minimization of the number of different nurses performing the service of each customer as a part of the objective function. An et al. [16] investigate the HCSRP when the intervals between visits may vary for different patients and develop a two-phase heuristic to solve the problem. Bard et al. [17,18,19] and Shao et al. [20] design a sequential greedy randomized adaptive search procedure (GRASP), a parallel GRASP, and a branch-and-price-and-cut algorithm to solve the weekly therapist routing and scheduling problem, which defines a set of therapists that can see a given patient. Trautsamwieser et al. [21] consider additional working time regulations (e.g., breaks, maximum working time per day, and daily as well as weekly rest times) for nurses into the weekly HCSRP and propose a branch-price-and-cut solution approach to exactly solve the problem using the solutions of a variable neighborhood search (VNS) algorithm as upper bounds. Cappanera et al. [22] use a pattern modeling device to jointly coordinate the assignment, scheduling, and routing decisions. In their problem, at most a given number of operators can be assigned to each patient in the considered planning horizon. In their approach, three pattern generation policies are analyzed to generate the set of patterns; the integer linear programming model constructed from the set of patterns is solved by the commercial optimization software. Maya Duque et al. [23] formulate the weekly HCSRP as a bi-objective (i.e., maximize the service level and minimize the travel distance) mathematical program, which is based on a set partitioning formulation and devise a two-stage solution approach to efficiently solve the problem. Liu et al. [24] propose the TS heuristic with feasible and infeasible local searches for the periodic VRP in HHC logistics. They extend their algorithm to solve the VRP with time windows, the min-max multiple traveling salesman problem (TSP), and the periodic TSP.
The above mentioned papers study the HCSRP in the mid-term planning horizon, whereas the following papers consider the HCSRP in the short-term planning horizon. Bertels et al. [9] apply the TS heuristic, the simulate annealing heuristic, and constraint programming to find a feasible working plan for nurses with various hard and soft constraints and preferences regarding HHC/HC. They model preferences of patients for certain nurses, preferences of nurses for certain patients. Meanwhile, they develop the optimization software PARPAP for real-world applications. Eveborn et al. [25] propose a repeated matching algorithm to obtain the visiting plan for care providers incorporating restrictions and soft objectives to the HCSRP. They define the preferred staff members for client’s visits. Furthermore, they develop a decision support system, LAPS CARE, to aid schedulers. Akjiratikarl et al. [26] design the particle swarm optimization algorithm to solve the daily HCSRP. Rasmussen et al. [27] solve the HCSRP with soft preference requirements (i.e., taking the maximization of carer-visit preferences as a part of the objective function) and temporal dependencies between the start times of visits using a branch-and-price (B & P) algorithm. Moreover, they use the visit clustering technique to accelerate the B & P algorithm. Mankowska et al. [28] propose an adaptive VNS algorithm to solve the HCSRP with interdependent services and staff member-patient compatibility. Yuan et al. [29] devise a B & P algorithm for the HCSRP with stochastic service times and skill requirements. Du et al. [5] propose the genetic algorithm to solve the HCSRP when considering patients’ priorities and time windows. Liu et al. [10] construct the model of the HCSRP with lunch break requirements and caregiver-customer compatibility, and develop a B & P algorithm to exactly solve the problem.
Uncertainty causes disruptions to an operational plan and it makes the smooth execution of the perfect plan hard. The disruption management is methodology that deals with disruptions or unexpected events in real time [11]. It has been widely used to address various optimization problems. Wang et al. [30] develop a combinational disruption recovery model for VRP with time windows and design a nested partition method to solve it. Kiefer et al. [31] deal with severe breakdowns of a public transport system and construct a mixed integer programming model to describe the problem, which is solved by commercial optimization software CPLEX. Zhang et al. [32] address the berth plan recovery problem and use a lexicographic-optimization-based approach to solve it. Dollevoet et al. [33] propose an iterative framework to reschedule time tables, rolling stocks, and crews that are associated with railway disruption management. Marla et al. [34] present both exact and approximate models for integrated aircraft and passenger recovery with flight planning to trade off delays and fuel burn. Wu et al. [35] adopt the iterative fixed-point method for integer programming to obtain feasible flight routes that are used to construct an aircraft reassignment in response to the grounding of one aircraft.
From the literature review, we can assert that the RT-HCSRP has been less attended when compared with the weekly or daily HCSRP. However, researchers must consider how to deal with unexpected events during the execution of an a priori plan. Meanwhile, as the mid- or short-term HCSRP, the RT-HCSRP is also an NP-hard problem. Exact algorithms (e.g., the branch-and-cut algorithm and the B & P algorithm) spend much more time than heuristics or meta-heuristics (e.g., the TS heuristic, the VNS heuristic, and the GRASP heuristic) in solving such optimization problems [36,37,38,39]. The use of exact algorithms is not acceptable by schedules or managers in practice. We have to resort to meta-heuristics to address the proposed problem. As the sustainable manufacturing system [40], the social old-age security system can be evolved continually by adopting these scientific approaches to solve the RT-HCSRP or other optimization problems that are associated with the HHC/HC service mode. Hence, this paper describes how to formulate the RT-HCSRP based on the idea of disruption management and solves it by the TS heuristic in reasonable computational times.
3. Problem Description
The RT-HCSRP takes the best solution of the daily HCSRP (called the original plan in the subsequent description) as input. First, in this section, the daily HCSRP is introduced. The HCSRP to generate the original plan can be defined on a complete graph G = (V, A), where V = {0, 1, 2, …, n + 1} and A = {(i, j)|i, j ∈ V, i ≠ j} are the node and arc set, respectively. Nodes 0 and n + 1 denote the HHC/HC center in practice. Other nodes N = {1, 2, …, n} represent the customers’ locations, where n is the number of known customers. Each customer i ∈ N has a service time tsi, a skill requirement ski, and an allowable service starting time window [ai, bi]. If caregivers arrive at customer i before its earliest allowable service starting time ai, then they have to wait and begin service until ai; if they arrive later than its latest allowable service starting time bi, then a penalty proportional to the lateness is incurred. Each customer is visited by a caregiver exactly once. Travel cost cij and travel time ttij are associated with each arc (i, j) ∈ A. At most m caregivers (k ∈ K) having different skills skk depart from node 0, visit several customers i (skk ≥ ski), and finish at node n + 1. To satisfy the continuity of care constraints derived from the periodic and daily visiting plans, the element pki in the caregiver-customer compatibility matrix is defined for each pair of caregiver k and customer i. If caregiver k can visit customer i, pki equals 1; otherwise, 0. The above problem is encountered when determining the visiting routes of caregivers to minimize the sum of travel cost and the penalty for lateness at customers with respect to specific constraints.
Each morning the HCSRP is solved to obtain an optimal or near-optimal solution for the original visiting routes of caregivers. If no disruption occurs during the execution of the original plan, then the caregivers follow the routes to visit customers; otherwise, caregivers must be rescheduled to absorb disruptions in remaining unexecuted routes. In this study, three types of unexpected events, including newly occurring request of customers, cancellation of customer’s services, and change of customer’s time windows, are considered. The change of customer’s time window can be seen as a combination of a new service request occurrence with the new time window and cancellation of service request with original time window. For the cancellation of a service request, caregivers can directly go to the next customer. Since the newly occurring request of customers has more influence on the adjustment of the original plan than the cancellation of service request, this paper deals with the situation in which new service requests arise.
The status of customers and caregivers is dynamically changed during the execution of the original visiting plan. When an unexpected event occurs at a given time T0, customers can be divided into four types regarding their status: customers who have been visited, customers who have not been visited, customers who are in service, and newly occurring customers. Because the service requests for the first type of customers have been satisfied before time T0, only the last three types of customers are considered in the RT-HCSRP. Caregivers can be classified into three types on the basis of their locations: caregivers who are in transit and going to next customer, caregivers who are at customer’s home, and caregivers who are at the HHC/HC center.
In the RT-HCSRP, the planning period is between time T0 and the end of the day. The locations of customers who are in service or the first customers to be served after the time T0 during the execution of the original plan are defined as critical nodes. Critical nodes in the node set CN are the starting nodes of caregivers in the updated visiting plan. The service starting time KTk of caregiver k equals the service completing time of customers at the corresponding critical node. To ensure adequate service capacity, one additional caregiver with the highest skill is assumed to be at the center, apart from the m caregivers that are used in the original plan.
For example, given three caregivers and nine customers, when an unexpected event occurs, as shown in Figure 1, caregivers C1 and C2 are going to the locations of customers 2 and 4, respectively, caregiver C3 is serving customer 8. According to the definition of critical nodes, the locations of customers 2, 4, and 8 are considered as three critical nodes.
Based on the description of the HCSRP, caregivers are assumed to depart from node 0 in the RT-HCSRP. Meanwhile, the following revisions are also made. First, for cnk ∈ CN, travel cost, and travel time between nodes 0 and cnk equal the total cost along the original route by caregiver k after serving the critical node and zero, respectively; its service duration is zero; and, node cnk is the first node to be visited in newly updated route by caregiver k. Second, for caregivers in the original plan, departure times from node 0 are KTk; for new caregiver k, the departure time from node 0 is T0 (i.e., KTk = T0). Finally, in the RT-HCSRP, the number of customers, time windows, and other parameters may change; the notation in the HCSRP is correspondingly labeled as new: V→V*, N→N*, K→K*, cij→cij*, ttij→ttij*, and pki→pki*.
The disruption management aims to minimize the original plan’s negative effect from unexpected events. Thus, the deviations must be quantitatively measured, and then taken as minimization objectives. We define the deviation measurements in terms of customers, caregivers, and companies. To formulate these deviation measurements, the notation is described: and are the starting service time and arrival time of customer i by caregiver k, respectively; and are binary decision variables, which denote whether caregiver k visits customer j after serving customer i and caregiver k is assigned to customer i or not, respectively; znew is binary decision variable, which represents whether the extra caregiver is used or not. The notation with and without stars represent variables used in the RT-HCSRP and HCSRP, respectively.
For customers, the disruption affects their starting service time and assigned customer. If the starting service time in the original plan is earlier than the end of time window of the customer, then the customer does not want a later postponement of the starting service time than the end of time window; otherwise, the customer does not want the starting service time to be delayed further. Meanwhile, the assigned customer should not be replaced by an unfamiliar caregiver to keep the caregiver consistency. Hence, the deviation measurement on customers is computed as
where wts and wcon are the weights of starting service time’s delay and caregiver consistency, respectively.
For caregivers, the disruption affects their route duration and the route segments. The route duration must not be lengthened, and the changes of route segments must be as less as possible. Therefore, the deviation measurement on caregivers is calculated as
where wtd and wpath are the weights of route duration’s increase and route segments’ changes, respectively.
For HHC/HC companies, the increase of the total cost, including the fixed cost for new caregiver, the travel cost, and the penalty for lateness at customers, is minimized. Thus, the deviation measurement on companies is described as
where cf is the fixed cost for a new caregiver and cl is the coefficient of penalty for lateness.
According to the foregoing statements, the mathematical model for the RT-HCSRP is presented as follows.
The objective function (4) minimizes the weighted sum of deviations of customers, caregivers, and companies, where ηi is the weight of the deviation measurement function fi (i = 1, 2, 3). Constraints (5) guarantee that each customer is visited by a caregiver exactly once. Constraints (6) to (8) ensure that each caregiver starts at node 0, visits some nodes, and finishes at node n + 1. Constraints (9) to (12) are used to calculate the starting service and arrival times of caregivers, where M is a considerably large positive constant. Constraints (13) impose that the critical nodes are the first ones to be visited along routes. Constraints (14) describe the relationship between decision variables and . Constraints (15)–(17) denote that decision variables are binary.
4. Solution Approach
As mentioned in previous sections, managers or schedulers must update the visiting plan in real time when the disruption occurs. Therefore, instead of exact algorithms, we have to resort to meta-heuristics to solve the RT-HCSRP.
First developed by Glover in 1986 [41], the tabu search (TS) heuristic is a local search meta-heuristic moving from the current solution to the best solution in its immediate neighborhood with each iteration exploring the solution space. During iterations, the TS heuristic also accepts the worse solution. As one of main features in the TS heuristic, the tabu list recording the recent search history is used to avoid searching recently explored solutions. The TS heuristic has successfully solved various combinatorial optimization problems, such as job shop scheduling [42], computer-aided process planning [43], and multiple yard scheduling [44]. It has solved some of VRP variants [45,46,47].
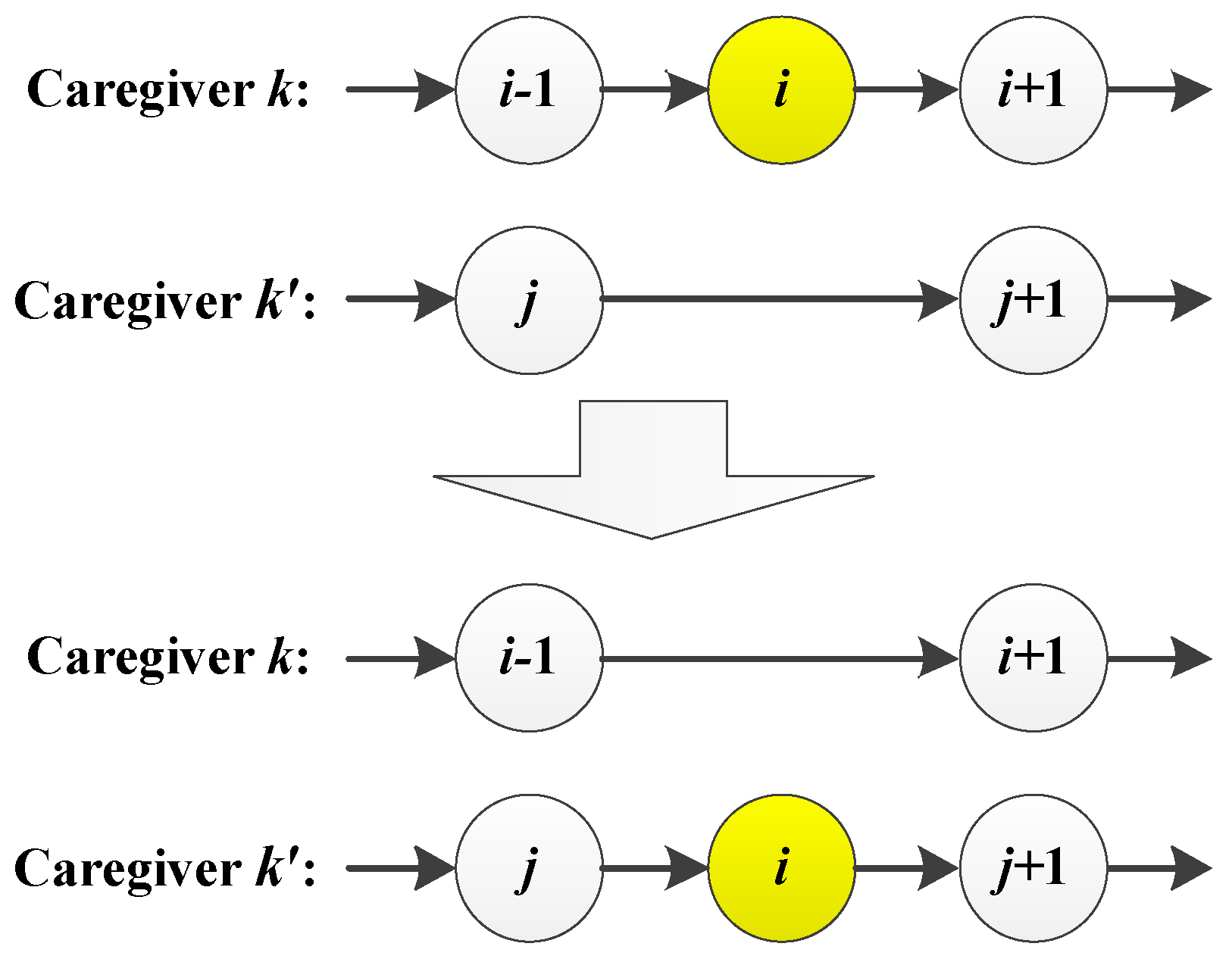
In this study, we also adopt the TS heuristic to solve the RT-HCSRP, given that the heuristic has demonstrated a powerful search ability in solving optimization problems. The TS heuristic used in this paper is similar to the framework by Cordeau et al. [48], with its flowchart described in Figure 2. The heuristic starts the search from an initial solution s, and then the tabu list and aspiration levels associated with solution s are initialized. During iterations, the neighbor set N(s) of solution s is generated using the neighborhood structures; solution s′ with the least solution evaluation value is selected from the neighbor set; solution s is replaced by solution s′; and, the tabu list and aspiration levels are updated. The iteration process continues until the stop criterion is satisfied. After the process stoppage, the GENIUS (GENeralized Insertion, Unstringing and Stringing) procedure [49] is applied to each route in the current best solution.
4.1. Initial Solution
The original plan obtained from the daily HCSRP is the input of the RT-HCSRP. Therefore, by inserting the new customer into the original plan, we can generate an initial solution of the TS heuristic. Based on this idea, the new customer is assigned to the caregiver who can serve him/her with the least increase in the objective function value. The above generated solution is used as an initial solution of the TS heuristic.
4.2. Tabu List, Aspiration Criterion, and Stop Criterion
The TS heuristic uses the tabu list and tabu duration as the form of adaptive memory to escape from local optima traps. In this study, each solution s is characterized by an attribute set B(s) = {(i, k): customer i is visited by caregiver k} recorded in the tabu list. A neighbor of solution s is obtained by replacing some attributes of B(s) with other attributes. When customer i is deleted from the route that is visited by caregiver k, a tabu status is assigned to the attribute (i, k); a tabu duration θ is also assigned to this attribute. In the next θ iterations, reassigning customer i to caregiver k is prohibited.
The tabu status of an attribute can be revoked when the attribute acceptance would lead to a solution with less objective function value than the current best solution having the attribute. The objective function value of the current best solution having an attribute is called the aspiration level of the attribute. The above rule is called the aspiration criterion.
The iterative process of the TS heuristic continues until a predefined number of iterations are executed.
4.3. Neighborhood Structures
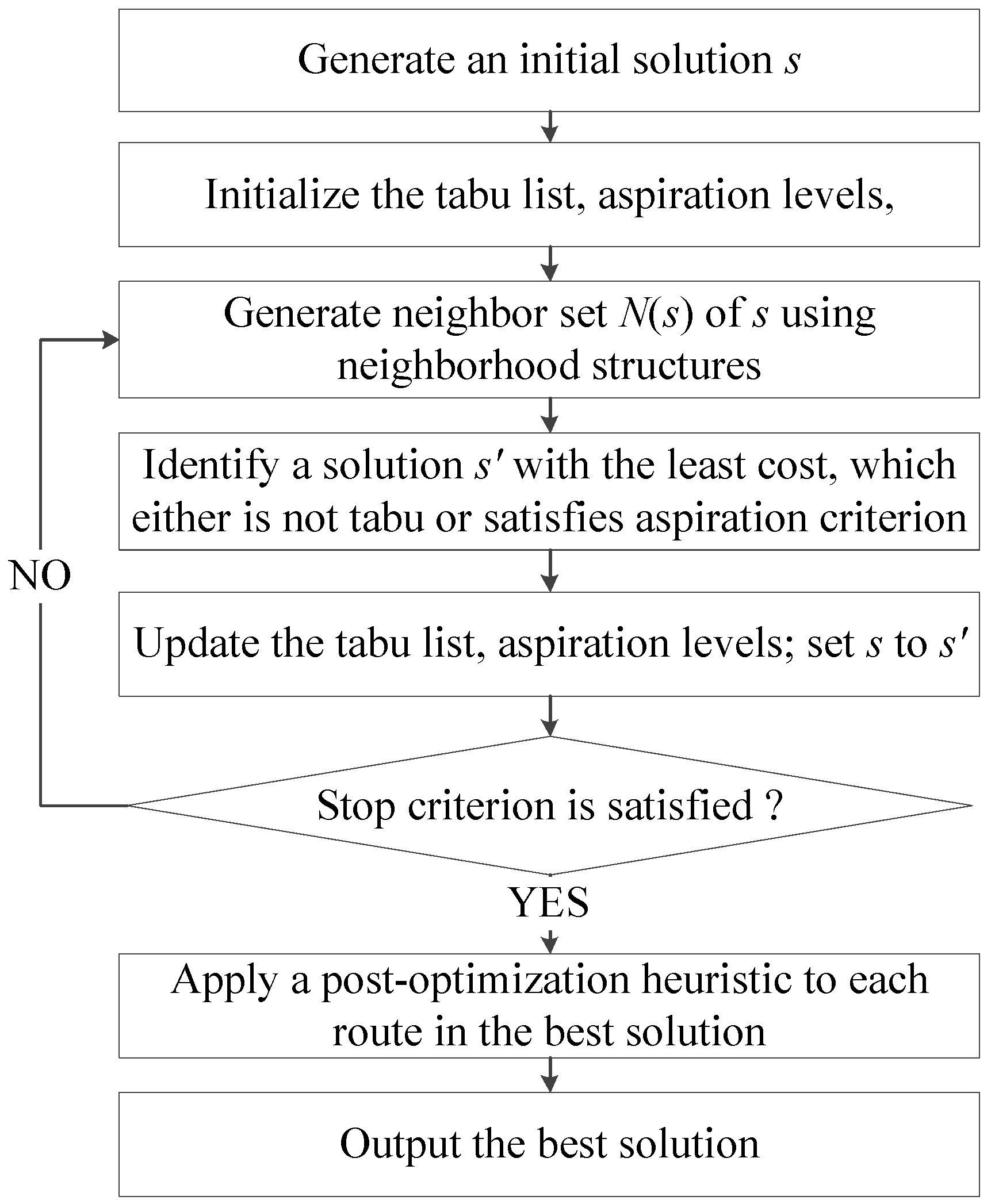
Neighborhood structures are used to generate new solutions during iterations. In the TS heuristic, new solutions are generated by removing a customer from the route visited by a caregiver and reinserting this customer into the route by another caregiver. As shown in Figure 3, when customer i (marked yellow) is removed from the route visited by caregiver k, the route of caregiver k connects the predecessor and successor customers (i.e., customers i − 1 and i + 1). The insertion of customer i in the route visited by caregiver k′ is performed between two consecutive customers j and j + 1.
4.4. Solution Evaluation
To guide the search into less explored solution space, if solution s′ is a non-improving neighborhood with respect to solution s, then solution s′ is penalized by a term proportional to the addition frequency of its attributes. The penalty (γ f(s)Σ(i,k)∈B(s′)ρik/λ) is proportional to the product of the objective function value of solution s (f(s)), the number of times that attribute (i, k) in B(s′) has been added during the search (ρik), and the factor of problem size (). Meanwhile, the parameter λ is the number of iterations that have performed so far; and, the parameter γ is the factor used to adjust the intensity of the diversification.
4.5. Cost Record Mechanism
According to the definition of neighborhood structures in the TS heuristic, new neighbors of a solution are generated by modifying its two routes. The objective function values of removing each customer from visited route by the original caregiver and inserting the customer into every possible position in another route are stored. Therefore, only the objective function values that are associated with the two changed routes require updating, whereas the rest are still used for the next iteration. Obviously, this cost record mechanism [50] can accelerate the computational speed of the TS heuristic by avoiding possible repetitive computations. Brandão [51] reported that using this mechanism can reduce at least 30% of the computational effort.
5. Computational Experiments
In this section, we first introduce the generation of test instances from real-life date that is provided by an HHC company. Then, we report the results that were obtained by using the strategy of disruption management. The algorithms of this paper are coded in C++ language and compiled on Microsoft Visual Studio 2008. All tests run on the computer with the Intel Core E7500 2.93 GHz CPU and 2 GB RAM under Windows 7 operating system.
5.1. Generation of Test Instances
We generate three test instances from the real-life data provided by an HHC company in Shanghai, China. The company mainly provides HHC services (e.g., cleaning, injection, and hospitalpice) for the elderly. The relevant information of customers, including locations, service time windows, and service durations, are available. Three instances, including 30 customers and five caregivers, 40 customers and seven caregivers, and 50 customers and nine caregivers, are generated from the dataset. A new customer occurring during the execution of the original plan (i.e., the unexpected event) is also selected from the dataset. The additional caregiver located at the HHC center is assumed to have own the highest skill and to be capable of serving all of the customers.
Through consulting managers in the company, the weights and the fixed cost for new caregivers in the model (1)–(17) are set as follows. In Equation (1), the weight of starting service time’s delay (wts) and the weight of caregiver consistency (wcon) are set to 1.0 and 50.0, respectively. In Equation (2), the weight of route duration’s increase (wtd) and the weight of route segments’ changes (wpath) are set to 1.0 and 5.0, respectively. In Equation (3), the fixed cost for new caregiver (cf) is set to 100.0, and the coefficient of penalty for lateness (cl) is set to 5.0. In Equation (4), the weights of the deviation measurement functions (ηi, i = 1, 2, 3) are set to 0.4, 0.1, and 0.5, respectively.
5.2. Parameter Settings
After performing a series of preliminary experiments on the three instances, the tabu duration θ is dynamically selected from the interval [0, ⌊7.5log10|N*|⌋] during the search; the factor used to adjust the intensity of diversification γ is 0.015; and, the total number of iterations defined in the terminal criterion is 15,000.
5.3. Results of Instances
Most previous studies about real-time VRPs focus on minimizing the total operating cost when updating the visiting plan [52,53,54,55]. Thereafter, the strategy of taking the minimization of total operating cost as the objective function is called the strategy of rescheduling, which can be achieved by ignoring the deviations on customers and caregivers (i.e., set the objective functions (1) and (2) to zero). To demonstrate the advantages of using the strategy of disruption management, we compare it with the strategy of rescheduling. Both of the strategies have different objective functions, as mentioned in previous statements. In the tests, the TS heuristic is first used to obtain the best solution of the daily HCSRP, and then used to solve the RT-HCSRP with the two strategies.
Table 1, Table 2 and Table 3 report the detailed results of the three instances. In these tables, the deviations from the updated plan that is generated by both strategies to the original plan are described in terms of companies, caregivers, and customers. For the deviations on companies, the total cost (i.e., the sum of the travel cost, the fixed cost for new caregivers, and the penalty for delayed services; Column “Total Cost”) and the number of caregivers used in the updated or original plan (Column “Number of Used Customers”) are reported. For the deviations on caregivers, the increase of total route duration (Column “Route Duration”) and the changes of route segments (Column “Route Segments”) are presented. For the deviations on customers, the delay of the starting service time (Column “Starting Service Time”) and the number of customers that are served by unfamiliar caregivers (Column “Caregiver Consistency”) are introduced. The computational time (Column “CPU”) is also reported. The notation “-” denotes not applicable in the corresponding term.
Taking the results of the instance with 30 customers as an example, we analyze the differences between the rescheduling and disruption management strategies. For companies, the total cost of using the rescheduling strategy is smaller than using the disruption management strategy. One more caregiver is used by the strategy of rescheduling than the strategy of disruption management. For caregivers, using the strategy of rescheduling does not lengthen the route duration, whereas using the strategy of disruption management prolongs the route duration by 44 min. The changes of route segments by the strategy of rescheduling are approximately two times larger than that by the strategy of disruption management. For customers, the starting service time is not extended using both strategies. Five customers are assigned to unfamiliar caregivers using the strategy of rescheduling, which greatly impair the satisfaction of these customers, whereas all of the customers are visited by their familiar caregivers in the strategy of disruption management. This similar analysis is also applicable for the results of instances with 40 and 50 customers in Table 2 and Table 3. From the analysis of these results, we can observe that the rescheduling strategy tends to use more caregivers, prolong the route duration of caregivers or change route segments of caregivers, and delay the starting service time of customers or assign unfamiliar caregivers to customers in order to minimize total operating cost of companies; whereas, the disruption management strategy incurs less deviations on customers and caregivers between the original and updated plans to improve the satisfaction of caregivers and customers.
If the fixed cost for the new caregiver (i.e., cf equals 100.0) is subtracted from the total cost that is obtained by the strategy of rescheduling, and then the sum of travel cost and penalty for lateness of the updated plan is less than that of the original plan even though the former serves one more customer than the latter. This is because to ensure sufficient service capacity, the new caregiver can serve all of the customers without considering the customer compatibility, which has significant influence on the design of the visiting plan. Although the total cost of companies using the strategy of rescheduling is smaller than using the strategy of disruption management, the latter can keep the satisfaction of most customers and has less influence on the original plan than the former. Therefore, HHC/HC companies should not only take the minimization of the total cost as the objective, but also consider the satisfaction of caregivers and customers when dealing with unexpected events.
The proposed TS heuristic is able to obtain high-quality solutions for the daily HCSRP and RT-HCSRP within a reasonable computational time. For example, solving the instance with 50 customers takes less than three seconds, which is acceptable by the HHC/HC companies in practice. Therefore, managers can make timely responses to the unexpected events.
6. Conclusions and Future Research Works
This study addresses the RT-HCSRP to handle the occurrence of new service requests. Based on the principle of disruption management, we define the disruption measurements on three types of participants (i.e., customers, caregivers, and companies) that are involved in delivering care services. The mathematical model is constructed to describe the RT-HCSRP. The TS heuristic is proposed to efficiently solve the problem. Moreover, the performance of the proposed algorithm is enhanced by a cost record mechanism. To demonstrate the advantages of the disruption management strategy, we compared it with the rescheduling strategy and analyze the details of the results of three real-life instances that were obtained by the two strategies. These numerical results show that although the rescheduling strategy spends less than the disruption management strategy to incorporate the unexpected event into the unexecuted part of the original plan, the former strategy incurs more deviations on customers and caregivers between the original and updated plans than the latter strategy. Obviously, using the solutions by the rescheduling strategy ignores the satisfaction of caregivers and customers. This will impair the competitiveness of companies and hinders the sustainable development of companies. Therefore, managers must make some trade-offs in these objectives involved in companies, customers, and caregivers.
This study can be extended from the following future research directions. First, the prototype management system that is based on the proposed TS heuristic is implemented for HHC/HC companies. Second, real-life instances from various companies are increased to validate the accuracy of the model and the effectiveness of the heuristic. Third, different types of unexpected events are simultaneously considered in the RT-HCSRP. Fourth, reducing the idle time of caregivers is considered in the objective function to increase the utilization rate.
Acknowledgments
The authors thank the three anonymous reviewers for their valuable comments and suggestions. This work is supported by the research grant from the National Natural Science Foundation of China (71432006, 61374095).
Author Contributions
Biao Yuan proposes the research idea, writes the manuscript, and designs the experiments. Zhibin Jiang proposes constructive suggestions to improve the manuscript and rewrites some parts of the manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
Nomenclature
To describe the RT-HCSRP, we first introduce the daily HCSRP. There are some identical symbols in the description of the two problems. The symbols without and with stars are used in the daily HCSRP and the RT-HCSRP, respectively. For ease of description, if the following symbol is labeled with a star in Section 3, it is used in the RT-HCSRP.
| V | the set of nodes |
| A | the set of arcs |
| N | the set of customers’ locations |
| CN | the set of critical nodes |
| K | the set of caregivers |
| M | a considerably large positive constant |
| n | the number of known customers |
| m | the number of caregivers |
| tsi | service time of customer i |
| ski | skill requirement of customer i |
| [ai, bi] | the time window of customer i |
| cij | travel cost of arc (i, j) |
| ttij | travel time of arc (i, j) |
| skk | skill owned by caregiver k |
| pki | equals 1 if caregiver k can serve customer i, and 0 otherwise |
| T0 | the time of unexpected events |
| KTk | the service completing time of customers at the corresponding critical node cnk |
| wts | the weight of starting service time’s delay |
| wcon | the weight of caregiver consistency |
| wtd | the weight of route duration’s increase |
| wpath | the weight of route segments’ changes |
| cf | the fixed cost for new caregiver |
| cl | the coefficient of penalty for lateness |
| f1 | the function of deviation measurement on customers |
| f2 | the function of deviation measurement on caregivers |
| f3 | the function of deviation measurement on companies |
| ηi | the weight of the deviation measurement function fi |
| tiks | decision variable, the starting service time of customer i by caregiver k |
| tika | decision variable, the arrival time of customer i by caregiver k |
| xijk | decision variable, equals 1 if caregiver k visits customer j after serving i, and 0 otherwise |
| yik | decision variable, equals 1 if caregiver k is assigned to customer i, and 0 otherwise |
| znew | decision variable, equals 1 if the new caregiver is used, and 0 otherwise |
References
- The Fifth National Census Office of the State Council. Main Data of the Fifth National Census in 2000; China Statistics Press: Beijing, China, 2000.
- The Sixth National Census Office of the State Council. Main Data of the Sixth National Census in 2010; China Statistics Press: Beijing, China, 2011.
- The Census Bureau of the State Council; Population Statistics Division of the National Bureau of Statistics. Census Data of China in 1982; Foreign Language Printing Factory: Beijing, China, 1982.
- The phenomenon of empty nest elderly in China highlights the low level of pension institutions. Available online: http://news.eastday.com/c/20120212/u1a6359071.html (accessed on 25 November 2017).
- Du, G.; Liang, X.; Sun, C. Scheduling optimization of home health care service considering patients’ priorities and time windows. Sustainability 2017, 9, 253. [Google Scholar] [CrossRef]
- Du, G.; Sun, C. Location planning problem of service centers for sustainable home healthcare: Evidence from the empirical analysis of Shanghai. Sustainability 2015, 7, 15812–15832. [Google Scholar] [CrossRef]
- Internet of things. Available online: https://en.wikipedia.org/wiki/Internet_of_things (accessed on 25 November 2017).
- Laporte, G. What you should know about the vehicle routing problem. Naval Res. Logist. 2007, 54, 811–819. [Google Scholar] [CrossRef]
- Bertels, S.; Fahle, T. A hybrid setup for a hybrid scenario: Combining heuristics for the home health care problem. Comput. Oper. Res. 2006, 33, 2866–2890. [Google Scholar] [CrossRef]
- Liu, R.; Yuan, B.; Jiang, Z. Mathematical model and exact algorithm for the home care worker scheduling and routing problem with lunch break requirements. Int. J. Prod. Res. 2017, 55, 558–575. [Google Scholar] [CrossRef]
- Yu, G.; Qi, X. Disruption Management: Framework, Model and Applications; World Scientific Publishing: Singapore, 2004. [Google Scholar]
- Fikar, C.; Hirsch, P. Home health care routing and scheduling: A review. Comput. Oper. Res. 2017, 77, 86–95. [Google Scholar] [CrossRef]
- Cissé, M.; Yalçındağ, S.; Kergosien, Y.; Şahin, E.; Lenté, C.; Matta, A. OR problems related to Home Health Care: A review of relevant routing and scheduling problems. Oper. Res. Health Care 2017, 13, 1–22. [Google Scholar] [CrossRef]
- Begur, S.V.; Miller, D.M.; Weaver, J.R. An integrated spatial DSS for scheduling and routing home-health-care nurses. Interfaces 1997, 27, 35–48. [Google Scholar] [CrossRef]
- Nickel, S.; Schroder, M.; Steeg, J. Mid-term and short-term planning support for home health care services. Eur. J. Oper. Res. 2012, 219, 574–587. [Google Scholar] [CrossRef]
- An, Y.-J.; Kim, Y.; Jeong, B.; Kim, S.-D. Scheduling healthcare services in a home healthcare system. J. Oper. Res. Soc. 2012, 63, 1589–1599. [Google Scholar] [CrossRef]
- Bard, J.F.; Shao, Y.; Wang, H. Weekly scheduling models for traveling therapists. Socio-Econ. Plan. Sci. 2013, 47, 191–204. [Google Scholar] [CrossRef]
- Bard, J.F.; Shao, Y.F.; Jarrah, A.I. A sequential GRASP for the therapist routing and scheduling problem. J. Sched. 2014, 17, 109–133. [Google Scholar] [CrossRef]
- Bard, J.F.; Shao, Y.F.; Qi, X.T.; Jarrah, A.I. The traveling therapist scheduling problem. IIE Trans. 2014, 46, 683–706. [Google Scholar] [CrossRef]
- Shao, Y.; Bard, J.F.; Jarrah, A.I. The therapist routing and scheduling problem. IIE Trans. 2012, 44, 868–893. [Google Scholar] [CrossRef]
- Trautsamwieser, A.; Hirsch, P. A branch-price-and-cut approach for solving the medium-term home health care planning problem. Networks 2014, 64, 143–159. [Google Scholar] [CrossRef]
- Cappanera, P.; Scutellà, M.G. Joint assignment, scheduling, and routing models to home care optimization: A pattern-based approach. Transp. Sci. 2015, 49, 830–852. [Google Scholar] [CrossRef]
- Maya Duque, P.A.; Castro, M.; Sörensen, K.; Goos, P. Home care service planning. The case of Landelijke Thuiszorg. Eur. J. Oper. Res. 2015, 243, 292–301. [Google Scholar] [CrossRef]
- Liu, R.; Xie, X.; Garaix, T. Hybridization of tabu search with feasible and infeasible local searches for periodic home health care logistics. Omega 2014, 47, 17–32. [Google Scholar] [CrossRef] [Green Version]
- Eveborn, P.; Flisberg, P.; Rönnqvist, M. LAPS CARE—An operational system for staff planning of home care. Eur. J. Oper. Res. 2006, 171, 962–976. [Google Scholar] [CrossRef]
- Akjiratikarl, C.; Yenradee, P.; Drake, P.R. PSO-based algorithm for home care worker scheduling in the UK. Comput. Ind. Eng. 2007, 53, 559–583. [Google Scholar] [CrossRef]
- Rasmussen, M.S.; Justesen, T.; Dohn, A.; Larsen, J. The home care crew scheduling problem: Preference-based visit clustering and temporal dependencies. Eur. J. Oper. Res. 2012, 219, 598–610. [Google Scholar] [CrossRef]
- Mankowska, D.; Meisel, F.; Bierwirth, C. The home health care routing and scheduling problem with interdependent services. Health Care Manag. Sci. 2014, 17, 15–30. [Google Scholar] [CrossRef] [PubMed]
- Yuan, B.; Liu, R.; Jiang, Z. A branch-and-price algorithm for the home health care scheduling and routing problem with stochastic service times and skill requirements. Int. J. Prod. Res. 2015, 53, 7450–7464. [Google Scholar] [CrossRef]
- Wang, X.; Ruan, J.; Shi, Y. A recovery model for combinational disruptions in logistics delivery: Considering the real-world participators. Int. J. Prod. Econ. 2012, 140, 508–520. [Google Scholar] [CrossRef]
- Kiefer, A.; Kritzinger, S.; Doerner, K.F. Disruption management for the Viennese public transport provider. Public Transp. 2016, 8, 161–183. [Google Scholar] [CrossRef]
- Zhang, Q.; Zeng, Q.; Yang, H. A lexicographic optimization approach for berth schedule recovery problem in container terminals. Transport 2016, 31, 76–83. [Google Scholar] [CrossRef]
- Dollevoet, T.; Huisman, D.; Kroon, L.G.; Veelenturf, L.P.; Wagenaar, J.C. Application of an iterative framework for real-time railway rescheduling. Comput. Oper. Res. 2017, 78, 203–217. [Google Scholar] [CrossRef]
- Marla, L.; Vaaben, B.; Barnhart, C. Integrated disruption management and flight planning to trade off delays and fuel burn. Transp. Sci. 2017, 51, 88–111. [Google Scholar] [CrossRef]
- Wu, Z.; Li, B.; Dang, C.; Hu, F.; Zhu, Q.; Fu, B. Solving long haul airline disruption problem caused by groundings using a distributed fixed-point computational approach to integer programming. Neurocomputing 2017, 269, 232–255. [Google Scholar] [CrossRef]
- Yuan, B.; Zhang, C.; Shao, X.; Jiang, Z. An effective hybrid honey bee mating optimization algorithm for balancing mixed-model two-sided assembly lines. Comput. Oper. Res. 2015, 53, 32–41. [Google Scholar] [CrossRef]
- Yuan, B.; Zhang, C.; Shao, X. A late acceptance hill-climbing algorithm for balancing two-sided assembly lines with multiple constraints. J. Intell. Manuf. 2015, 26, 159–168. [Google Scholar] [CrossRef]
- Memari, A.; Abdul Rahim, A.R.; Absi, N.; Ahmad, R.; Hassan, A. Carbon-capped distribution planning: A JIT perspective. Comput. Ind. Eng. 2016, 97, 111–127. [Google Scholar] [CrossRef]
- Sadeghi, J.; Niaki, S.T.A.; Malekian, M.R.; Wang, Y. A Lagrangian relaxation for a fuzzy random EPQ problem with shortages and redundancy allocation: Two tuned meta-heuristics. Int. J. Fuzzy Syst. 2017, in press. [Google Scholar] [CrossRef]
- Alsaffar, A.J.; Raoufi, K.; Kim, K.-Y.; Okudan Kremer, G.E.; Haapala, K.R. Simultaneous consideration of unit manufacturing processes and supply chain activities for reduction of product environmental and social impacts. J. Manuf. Sci. Eng. Trans. ASME 2016, 138, 101009. [Google Scholar] [CrossRef]
- Glover, F. Future paths for integer programming and links to artificial intelligence. Comput. Oper. Res. 1986, 13, 533–549. [Google Scholar] [CrossRef]
- Zhang, C.; Li, P.; Guan, Z.; Rao, Y. A tabu search algorithm with a new neighborhood structure for the job shop scheduling problem. Comput. Oper. Res. 2007, 34, 3229–3242. [Google Scholar] [CrossRef]
- Lian, K.; Zhang, C.; Shao, X.; Zeng, Y. A multi-dimensional tabu search algorithm for the optimization of process planning. Sci. China Technol. Sci. 2011, 54, 3211–3219. [Google Scholar] [CrossRef]
- Chen, L.; Langevin, A. Multiple yard cranes scheduling for loading operations in a container terminal. Eng. Optim. 2011, 43, 1205–1221. [Google Scholar] [CrossRef]
- Liu, L.; Li, K.; Liu, Z. A capacitated vehicle routing problem with order available time in e-commerce industry. Eng. Optim. 2017, 49, 449–465. [Google Scholar] [CrossRef]
- Cordeau, J.-F.; Maischberger, M. A parallel iterated tabu search heuristic for vehicle routing problems. Comput. Oper. Res. 2012, 39, 2033–2050. [Google Scholar] [CrossRef]
- Liu, R.; Tao, Y.; Hu, Q.; Xie, X. Simulation-based optimisation approach for the stochastic two-echelon logistics problem. Int. J. Prod. Res. 2016, 55, 187–201. [Google Scholar] [CrossRef]
- Cordeau, J.F.; Laporte, G.; Mercier, A. A unified tabu search heuristic for vehicle routing problems with time windows. J. Oper. Res. Soc. 2001, 52, 928–936. [Google Scholar] [CrossRef]
- Gendreau, M.; Hertz, A.; Laporte, G. New insertion and postoptimization procedures for the traveling salesman problem. Oper. Res. 1992, 40, 1086–1094. [Google Scholar] [CrossRef]
- Zhang, J.L.; Lam, W.H.K.; Chen, B.Y. A stochastic vehicle routing problem with travel time uncertainty: Trade-off between cost and customer service. Netw. Spat. Econ. 2013, 13, 471–496. [Google Scholar] [CrossRef]
- Brandão, J. A tabu search algorithm for the open vehicle routing problem. Eur. J. Oper. Res. 2004, 157, 552–564. [Google Scholar] [CrossRef]
- Li, J.-Q.; Mirchandani, P.B.; Borenstein, D. The vehicle rescheduling problem: Model and algorithms. Networks 2007, 50, 211–229. [Google Scholar] [CrossRef]
- Li, J.-Q.; Mirchandani, P.B.; Borenstein, D. Real-time vehicle rerouting problems with time windows. Eur. J. Oper. Res. 2009, 194, 711–727. [Google Scholar] [CrossRef]
- Pillac, V.; Gendreau, M.; Guéret, C.; Medaglia, A.L. A review of dynamic vehicle routing problems. Eur. J. Oper. Res. 2013, 225, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Spliet, R.; Gabor, A.F.; Dekker, R. The vehicle rescheduling problem. Comput. Oper. Res. 2014, 43, 129–136. [Google Scholar] [CrossRef]
Figure 1.
Unexpected event: illustration for critical nodes.
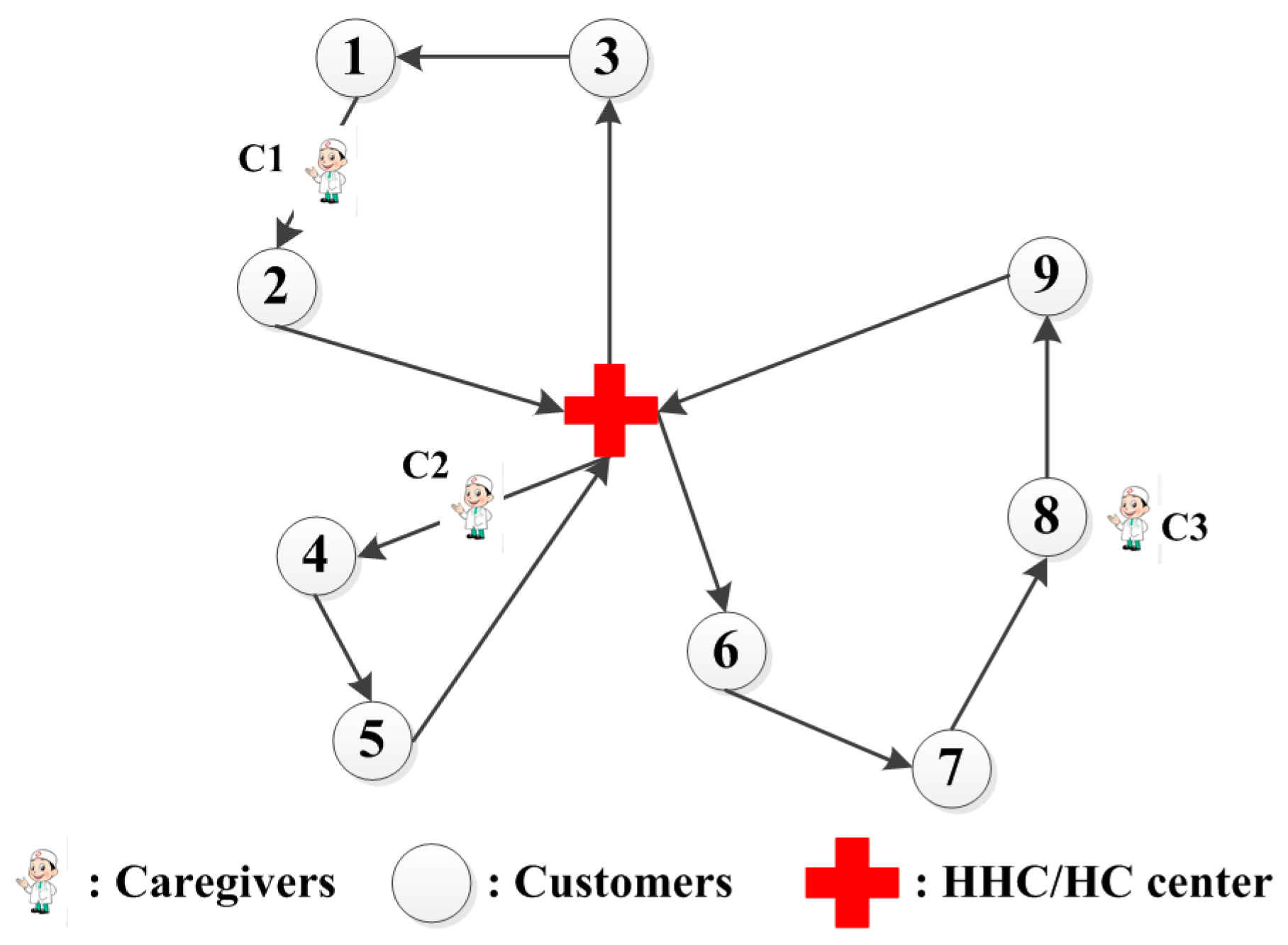
Figure 2.
Flowchart of the tabu search (TS) heuristic.
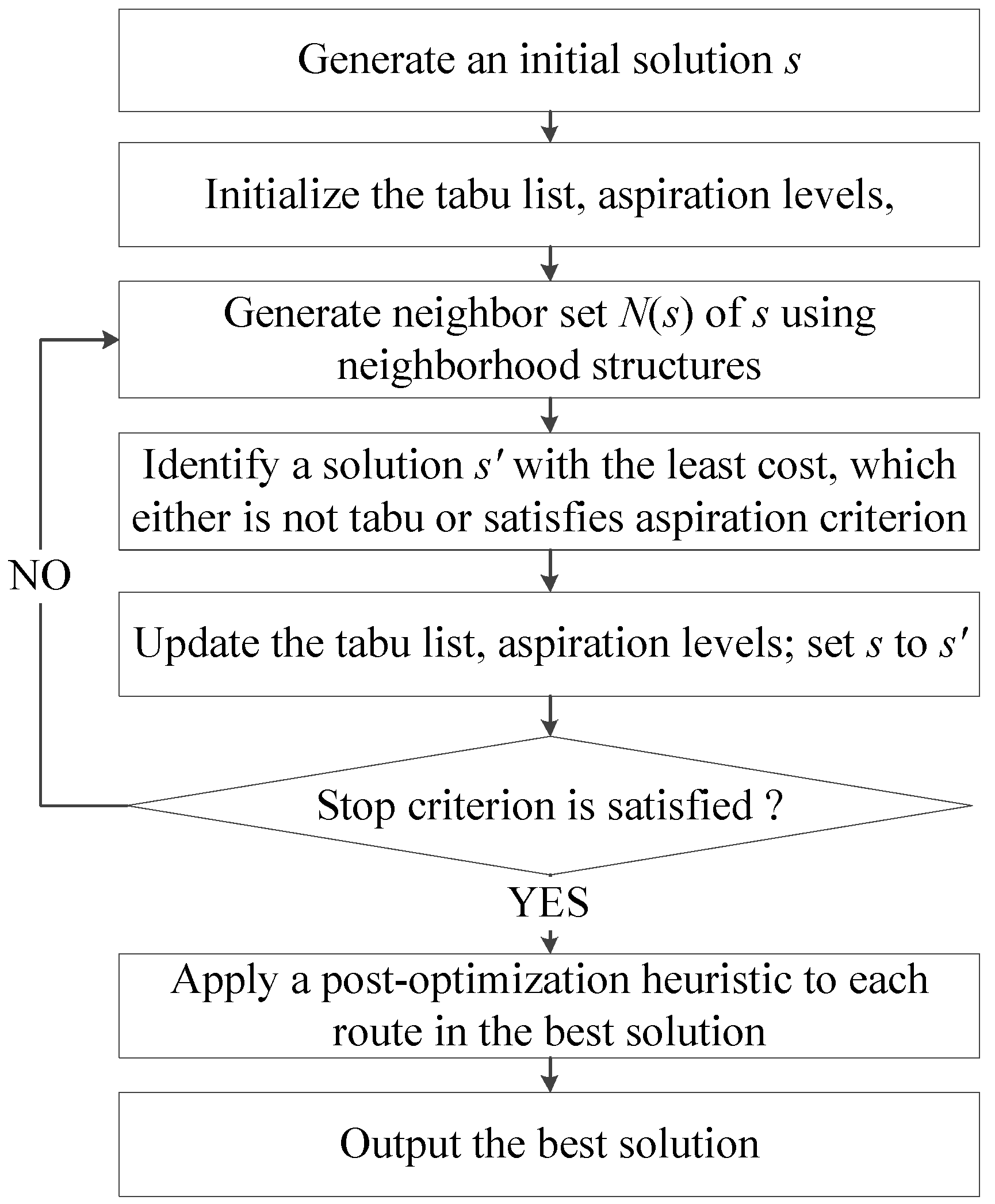
Figure 3.
Illustration for neighborhood structure.


{kind=link}
{kind=link}
{kind=link}
Table 1.
Results of the instance with 30 customers.
| Strategy | Companies | Caregivers | Customers | CPU (s) | |||
|---|---|---|---|---|---|---|---|
| Total Cost | Number of Used Caregivers | Route Duration | Route Segments | Starting Service Time | Caregiver Consistency | ||
| Original Plan | 1374.0 | 5 | - | - | - | - | - |
| Rescheduling | 1332.0 | 6 | 0 | 13 | 0 | 5 | 0.7 |
| Disruption Management | 1473.0 | 5 | 44 | 7 | 0 | 0 | 1.3 |
Table 2.
Results of the instance with 40 customers.
| Strategy | Companies | Caregivers | Customers | CPU (s) | |||
|---|---|---|---|---|---|---|---|
| Total Cost | Number of Used Caregivers | Route Duration | Route Segments | Starting Service Time | Caregiver Consistency | ||
| Original Plan | 1622.0 | 7 | - | - | - | - | - |
| Rescheduling | 1646.0 | 8 | 0 | 35 | 0 | 5 | 1.4 |
| Disruption Management | 1697.0 | 7 | 0 | 3 | 0 | 0 | 2.1 |
Table 3.
Results of the instance with 50 customers.
| Strategy | Companies | Caregivers | Customers | CPU (s) | |||
|---|---|---|---|---|---|---|---|
| Total Cost | Number of Used Caregivers | Route Duration | Route Segments | Starting Service Time | Caregiver Consistency | ||
| Original Plan | 2529.0 | 9 | - | - | - | - | - |
| Rescheduling | 2157.0 | 10 | 41 | 57 | 5 | 6 | 2.6 |
| Disruption Management | 2652.0 | 9 | 22 | 9 | 0 | 0 | 2.5 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Yuan, B.; Jiang, Z. Disruption Management for the Real-Time Home Caregiver Scheduling and Routing Problem. Sustainability 2017, 9, 2178. https://doi.org/10.3390/su9122178
AMA Style
Yuan B, Jiang Z. Disruption Management for the Real-Time Home Caregiver Scheduling and Routing Problem. Sustainability. 2017; 9(12):2178. https://doi.org/10.3390/su9122178
Chicago/Turabian StyleYuan, Biao, and Zhibin Jiang. 2017. "Disruption Management for the Real-Time Home Caregiver Scheduling and Routing Problem" Sustainability 9, no. 12: 2178. https://doi.org/10.3390/su9122178
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.