Comparative Analysis of Intelligent Transportation Systems for Sustainable Environment in Smart Cities
by
 , and
, and
Anandkumar Balasubramaniam
1, 
Anand Paul
1,*,
Won-Hwa Hong
2,*,
HyunCheol Seo
2 and
Jeong Hong Kim
1 1
Department of Computer Science and Engineering, Kyungpook National University, Daegu 702701, Korea
2
School of Architectural, Civil, Environmental and Energy Engineering, Kyungpook National University, Daegu 702701, Korea
*
Authors to whom correspondence should be addressed.
Sustainability 2017, 9(7), 1120; https://doi.org/10.3390/su9071120
Submission received: 30 April 2017
/
Revised: 16 June 2017
/
Accepted: 26 June 2017
/
Published: 28 June 2017
(This article belongs to the Special Issue Autonomous and Sustainable Computing for preparing the Internet of Things Environment)
Abstract
:In recent works on the Internet of Vehicles (IoV), “intelligent” and “sustainable” have been the buzzwords in the context of transportation. Maintaining sustainability in IoV is always a challenge. Sustainability in IoV can be achieved not only by the use of pollution-free vehicular systems, but also by maintenance of road traffic safety or prevention of accidents or collisions. With the aim of establishing an effective sustainable transportation planning system, this study performs a short analysis of existing sustainable transportation methods in the IoV. This study also analyzes various characteristics of sustainability and the advantages and disadvantages of existing transportation systems. Toward the end, this study provides a clear suggestion for effective sustainable transportation planning aimed at the maintenance of an eco-friendly environment and road traffic safety, which, in turn, would lead to a sustainable transportation system.
1. Introduction
In recent years, tremendous development has occurred in the transportation field, specifically in vehicular transportation [1]. The term “transportation system” has been reformed to “intelligent transportation system” (ITS) owing to rapid developments of, and advancements in, recent transportation technologies [2,3]. The vehicular ad hoc network (VANET), which is a conventional technology that modifies each and every vehicle to a wireless router to enable inter-vehicular communication, has been extended to the concept of Internet of Vehicles (IoV) for ITSes; the IoV includes vehicular networking, as well as vehicular intelligence [4]. The IoV is an intelligent communication link between vehicles and public networks, for example, for vehicle-to-vehicle, vehicle-to-road, and vehicle-to-human communications, in the IoV, the systems are connected electronically and they communicate via the mobile Internet. Dedicated short-range communication (DSRC) devices, which operate in the 5.9 GHz band, are implemented in the IoV [5,6]; the communication range between the devices is approximately 1000 m.
The main objectives of the IoV are the collection or sharing of information about the vehicle, road infrastructure, or vehicle user, and processing of this information to guide or supervise vehicles efficiently in order to prevent accidents and/or road traffic congestion, and thereby make the driving experience safe and enjoyable for the drivers/passengers.
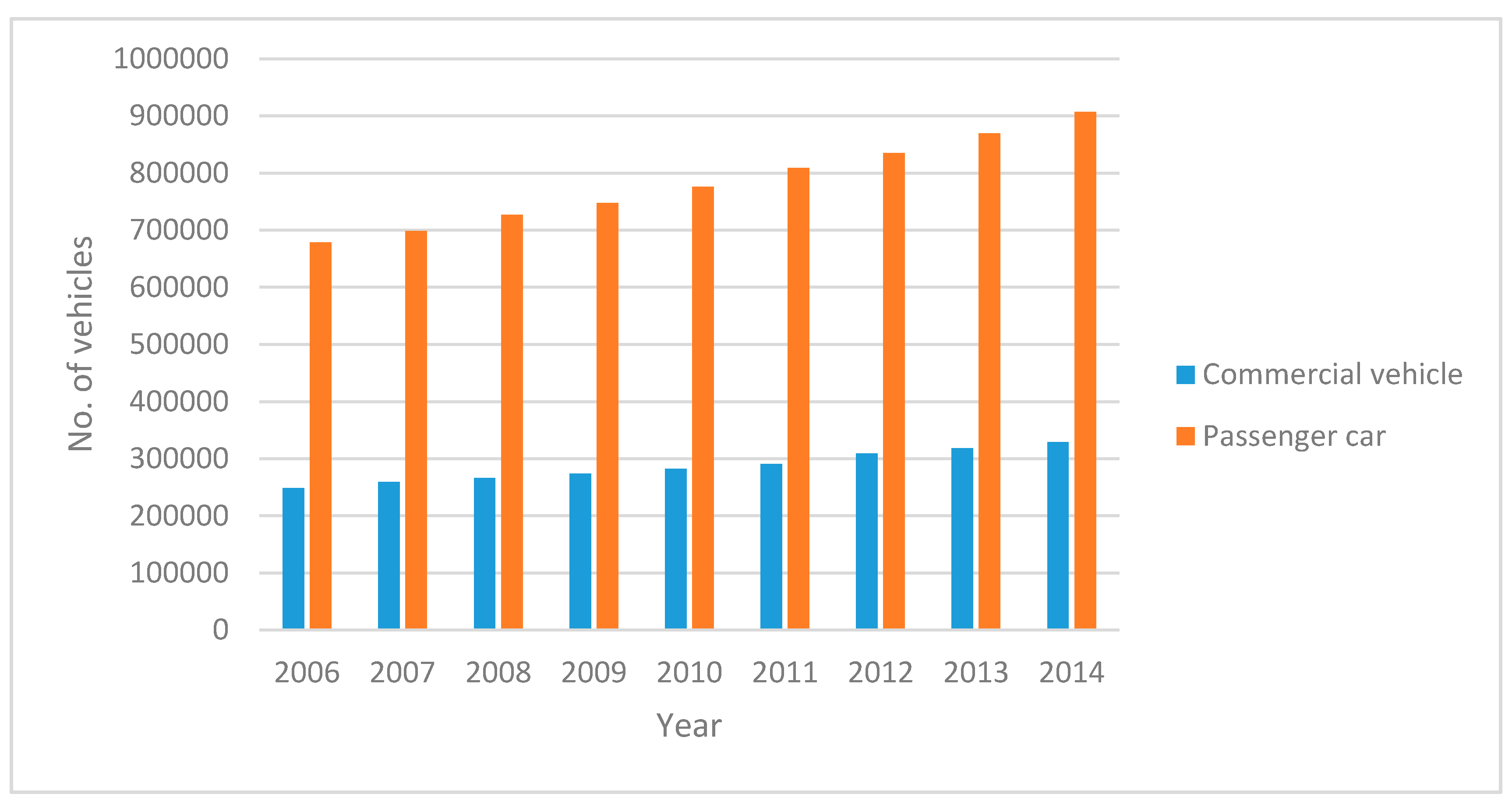
Despite the advancements in vehicular transportation, maintenance of transportation sustainability is perpetually an essential and challenging task. Sustainability of transportation involves not only managing go-green transportation, but also establishing effective transportation planning systems for ensuring road traffic safety. Statistical analysis [7] has shown that the usage of vehicles, especially cars, has been on the rise since 2006. Figure 1 shows a graphical representation of the global usage of passenger cars and commercial vehicles in the period of 2006–2014. The graph clearly reveals a consistent growth in vehicle usage.
An increase in vehicular usage has been found to be accompanied by a considerable increase in the total number of road accidents. From existing data [8], the number of deaths caused by unnecessary or careless accidents in 2013 in Asia is estimated to be more than 50,000.
There are many reasons for the occurrence of road accidents, such as distracted driving, environmental disasters, unsafe lane changes, collisions due to congestion, improper turning, and animal or pedestrian crossing. In order to ensure the sustainability of vehicular transportation, it is necessary to implement an effective intelligent transportation planning system that will improve road traffic safety and create a more eco-friendly environment. This paper presents a short analysis of green transportation, collision avoidance in transportation, electric cars, and autonomous cars, and provides a suggestion toward the end for developing an effective and efficient sustainable transportation planning system.
2. Literature Survey
2.1. Green Transportation
An increase in vehicle usage has led to the utilization of vast quantities of fossil fuels. Such a high consumption of fossil fuels for vehicles leads to carbon emissions, which, in turn, cause environmental pollution. Several research works have been conducted to enable the transition toward a sustainable world economy via the manufacture of non-polluting, environmentally-friendly vehicles. An analysis of some existing methods is presented herein.
In 2009, Grob and Iseo [9] addressed the dilemma of energy consumption in the transportation sector. The extensive utilization of nonrenewable energy resources leads to an increased demand for fuels and creates various health-related problems on account of pollution effects. The authors proposed the concept of electrically-driven transport, where electricity is generated from a vast number of renewable energy sources. An electricity network is implemented using a smart grid that acts as an intelligent interconnection between various sectors, such as the industry and the transportation sector and controls the demand and supply of power. Implementation of this electrically-driven transport will result in a considerable reduction of environmental pollution and provide a clean and efficient mode of transportation. Use of advanced batteries and credit card plug-in battery stations for electric vehicles will also pave the way for clean and efficient transportation systems. The authors concluded with recommendations to implement a smart electric grid, an electric rapid transit system, and remote metered recharging plugs at all parking lots in order to establish a clean and efficient sustainable transportation system. The advantages of this approach are a reduction in the use of nonrenewable resources, reduction of environmental pollution, and a lowered demand for the production of fuel combustion engines. The main disadvantage of this approach is the very large implementation cost for the electric battery charging system and credit card plug-in battery stations.
In 2015, Mehar et al. [10] proposed an integrated architecture for a future sustainable transportation system with a focus on electric vehicles in order to reduce pollution and greenhouse gas emissions. In this architecture, electric vehicles are deployed with various sensors to monitor engine performance, braking, and passenger safety, and energy-consumption-related information is simultaneously collected and processed to enable the driver to overcome the limitations of electric vehicles. The authors made a recommendation of increasing the amount of battery charge while reducing the charging duration in order to enable electric vehicles to be driven for long distances. They also recommended a common standard to support charging of electric vehicles of any make at different charging stations. In addition, the authors recommended the use of an efficient smart grid—given that electric vehicles consume enormous amounts of electricity—while also guaranteeing security of data transmissions in various fleet management systems.
In 2015, Iturrate et al. [11] undertook an investigation project for sustainable transportation, in which the University of the Basque Country and OSALAN also participated. The project focused mainly on the mobility patterns of the students of these two organizations, parking policies, and innovative mobility alternatives, such as car sharing. A large dataset of students using different modes of transportation was analyzed based on individual preferences for transportation modes. Even though the authors did not propose a definite mode of transportation, they offered alternative modes of mobility, such as public transportation and car sharing, and proposed measures to combine the implementation of the mobility modes.
In 2016, Harilakshmi and Rani [12] addressed the problem of traffic-induced air pollution, which adversely affects the environment; they proposed an intelligent vehicle counter for detecting and counting dynamic vehicles, which would aid the concerned pollution control board to take suitable action for mitigating the effects of traffic-induced air pollution. Various other vehicular pollution control measures can be implemented by analyzing the traffic flow; this aids in prevention of problems due to traffic-induced air pollution and, consequently, paves the way for sustainable transportation and pollution prevention.
In 2016, Fabbri et al. [13] implemented the K-bus project, in which ultracapacitor batteries are utilized in public transportation. In the K-bus project, a charging station is provided at each bus stop, and by the utilization of efficient energy storage and transfer systems, the bus is charged using conducting plates installed in the charging stations; the time taken for charging is shorter than that taken by passengers to exit and enter the bus. The authors performed simulations and various tests such as a bus system test, a ground station system charging test, and an integration test. The advantages of this project include a lower cost of implementation, reduced carbon emissions, and adaptability and applicability to various kinds of vehicles.
2.2. Collision Avoidance
There has been an increase in road traffic accidents in recent times. As mentioned earlier, there are several reasons for the occurrence of road accidents. One of the main reasons is the occurrence of unnecessary collisions between vehicles. Numerous collision avoidance methods have been proposed in recent years in order to prevent or reduce the occurrence of such unnecessary collisions.
In 2005, Abdalla and Abaker [14] conducted a short survey on existing collision avoidance systems, such as an alcohol detection system, automatic window opening system, blind-spot accident prevention system, long-range detection for frontal collision avoidance system, MobilEye-vision-based frontal collision warning system, and automatic speed control system. After analyzing the existing collision avoidance systems, the authors suggested implementation of ultrasonic sensors and laser sensors in smart vehicles, along with camera image processing to prevent accidents.
In 2011, Abid et al. [15] proposed V-Cloud architecture, which includes a vehicular cyber-physical system and a cloud-computing-enabled system that collect data on the primary vehicle, other vehicles inside the network, environmental surroundings, and road infrastructure, and sends these data to the cloud via a communication networks, e.g., DSRC, Wi-Fi, and various other cellular networks, by means of a smartphone deployed inside the primary vehicle. Additionally, in this architecture, the mood conditions of drivers are monitored using the smartphone and the monitored data are stored in the cloud to predict the mood of the driver; this leads to an improvement in driver safety through the provision of real-time services to a driver when he/she is unwell or in discomfort. This approach has disadvantages pertaining to security and privacy; to overcome these disadvantages, the authors implemented security modules, such as a smart author in the architecture.
In 2014, Mbachu and Onuora [16] addressed the issue of road traffic accidents and proposed the use of a vehicular accident detection and avoidance system as a solution. Ultrasonic sensors are installed in the front end of the vehicle and an automatic brake system is incorporated in the design of the accident detection and avoidance system. Two parameters—time of arrival of the reflected signal and angle of arrival of the reflected signal—are used to determine the position of the receivers, thereby providing optimal system performance. Thus, a warning alarm is sounded and the automatic brake system is activated when the distance of an obstacle to the vehicle is less than 7 m. The advantages of this approach are a low implementation cost, reliability of accidental detection, and collision avoidance.
In 2016, Jurecki [17] investigated driver behaviors and parameters such as driver response time to braking and steering response time, which are important parameters for prevention of road accidents. The author performed additional investigations and tests of driver behavior under various conditions and situations. Based on the obtained results, an appropriate driver response time was assumed and the intensity of collision avoidance maneuvers undertaken by a driver in a collision-imminent situation was determined.
In 2016, Hamid et al. [18] analyzed various collision mitigation technologies for existing advanced driver assistance systems (ADASes) such as automatic cruise control (ACC), automatic parking, collision avoidance, and lane departure warning systems. An ACC system enables maintenance of a safe distance between the primary vehicle and the vehicle in front of it by the use of environmental information collected by sensors installed in moving vehicles. Automatic parking technology enables parallel or perpendicular parking of a vehicle, thereby reducing driver stress. Collision avoidance systems are incorporated with collision avoidance algorithms, which possess threat assessment, path planning, and path tracking strategies. The lane departure warning system provides visual, audible, or haptic warning signals to the driver in the case of lane departure, and automatically controls the vehicle when no action is taken upon lane departure.
In an intelligent transportation system (ITS), a large amount of data collected from various sensors is distributed among connected vehicles and roadside units. These data need to be handled in real-time by means of effective data classification methods [19]; effective data analysis enables effective road traffic predictions, and so on. If the connected devices are handling cellular data, then the interference graph construction protocol is used for device-to-device communication [20]. Centralized and distributed cooperative vehicular communication in an ITS provides safety measures and also paves the way for improving the road traffic safety, while reducing the constraints on vehicular communication and optimizing energy consumption [21]. In addition, cooperative centralized and distributed spectrum-sensing techniques need to be utilized to minimize unnecessary spectral scarcity and mobility issues, efficiently manage the spectrum in vehicular communication, and minimize interference [22]. Frontal and side collisions of vehicles are common collision scenarios in road accidents. Utilization of a swarm intelligence approach and swarm-inspired models aids in prevention of frontal and side collisions and control of vehicles moving at different speeds; this is made possible through the initiation of lane changes in the swarm-inspired models [23] and solving of vehicle routing problems via effective utilization and implementation of particle swarm optimization [24]. Most road accidents are caused by human behavioral errors during driving. Therefore, analysis of human behaviors is much more crucial in the IoV environment. In 2016, Paul et al. [25] effectively analyzed human behaviors and human dynamics in real-time by utilizing the concept of SmartBuddy. Based on the analysis results, appropriate feedback is given to the user/driver to enable him/her to take appropriate measures depending on the situation; this is accompanied by continuous monitoring and improvisation of human behavior, as well as human dynamics, which aids in the prevention of vehicle collisions.
2.3. Electric Vehicles
In present times, a key cause of environmental pollution is carbon emissions due to the usage of fossil-fuel-based transportation. The perfect solution to minimizing these carbon emissions is the use of electric vehicles; their use would also lead to maintenance of transportation sustainability.
In 2014, Costa and Seixas [26] addressed carbon emission issues and developed a futuristic concept of replacing gasoline-powered vehicles with battery electric cars to reduce the impact of carbon emissions. The proposed scenario of replacing gasoline vehicles with electric vehicles was shown to reduce the gasoline consumption to 7% in 2020 and 13% in 2030.
In 2016, Zhang et al. [27] investigated a driving cycle for electric vehicles such as electric cars in Beijing, where a driving cycle determines the emissions and fuel/battery consumption of a vehicle. They implemented a data acquisition and management system for data collection and analyzed various characteristic parameters of driving to build a representative driving cycle.
In 2016, Sriwilai et al. [28] proposed the use of electric vehicles in view of reducing the gasoline consumption and carbon-based emissions. They implemented an adaptive neuro-fuzzy inference system to effectively analyze the energy consumptions in various sectors, such as the agriculture, commercial, residential, industrial, and transportation sectors. From the analysis, the authors found that the use of electric vehicles leads to a reduction in both gasoline consumption and carbon-based emissions.
2.4. Autonomous Vehicles
Autonomous transportation, also referred to as self-driving cars, has recently been emerging as an upcoming technology that will be a replacement for driver-based vehicles or human-operable electric vehicles. Many research works have been conducted for implementing autonomous transportation with the aim of developing a smart community that would, in turn, lead to a smart city and sustainable transportation. The first autonomous car system [29] was implemented in 1997 at Schiphol airport. In 2008, an advanced autonomous cyber-car system was introduced at Heathrow airport in London.
In 2015, Khan et al. [30] addressed the challenges faced in road marking detection and proposed a road marking detection system to overcome these challenges; in this system, a graph cut segmentation method is used for detection of road markings and an inverse perspective transform method is used for the generation of a bird’s-eye view image from images captured from various cameras. However, true detection rates achieved using this method for images with and without a background are 80% and 91%, respectively.
In 2016, Li et al. [31] presented a driver model for autonomous cars based on human behavioral dynamics, which was established through an analysis of various driver properties, such as age, gender, and emotion. The proposed driver model for autonomous cars was useful for preventing collisions, improvising driver preferences, and creating a safe driving experience; the model also eliminated human errors. The overall driving characteristics, i.e., speed, direction, and lane and traffic light changes, were simulated in the driver model, and the simulated human behavioral dynamics data were analyzed to establish an effective driver model that characterized human dynamics for autonomous cars.
In 2016, D. Kamran et al. [32] addressed navigation issues of autonomous cars in outdoor environments. The authors proposed the use of a novel online visual gyroscope, wherein images captured by a monocular camera deployed in a moving autonomous car are analyzed to estimate the car’s rotation to ensure its efficient navigation. The proposed real-time online visual gyroscope estimated the yaw degree of a moving car in various datasets at a rate of 10 fps and with an average drift of 0.08° per frame.
In 2016, V. D. Nguyen et al. [33] addressed issues pertaining to travel time and carbon emissions. They proposed a reliable green light optimal speed advisory system, in which the autonomous car communicates with traffic lights and roadside units or road infrastructure to arrive at the intersection when the traffic light is green; this system also optimizes the car speed on the basis of data collected from the roadside in order to reduce the waiting time at intersections. The authors’ analysis revealed that implementation of the proposed methodology reduced carbon emissions and improved the fuel efficiency based on the vehicle density. Power management and machine-to-machine (M2M) optimization [34,35,36] are essential tasks for battery-powered wireless sensor network systems. The autonomous operation time of battery-powered systems can be increased through utilization of reinforcement learning in intelligent dynamic power management systems [37]. Autonomous vehicles are expected to play a major role in the future transportation market. In some largely populated cities, a futuristic approach is to use autonomous vehicles along with implementation of time-of-day pricing schemes [38]; this approach is beneficial for passengers owing to minimal trip costs in peak hours, and it also promotes the growth of the taxi market.
2.5. Summary
Although the use of nonrenewable resources is reduced in green transportation, a few factors remain to be considered, such as electric battery charging systems and prepaid plug-in charging stations. Novel standard charging stations need to be developed as a common base for vehicles manufactured by various companies. The use of electric vehicles needs to be accompanied by an analysis of the traffic flow of various kinds of vehicles in order to ensure pollution-free transportation. From another perspective, collision avoidance technologies in connected vehicles play a key role in maintaining the safety of passengers/drivers during travel. Various other technologies, such as image processing, prediction of driver behaviors, implementation of sensors, analysis of human behaviors/dynamics and driver response time, ACC, and swarm-inspired models are used to prevent unnecessary collisions between connected vehicles. Another futuristic approach is the introduction of autonomous vehicles, which are electric vehicles equipped with artificial intelligence. Although autonomous vehicles are the most suitable vehicles for green transportation, several factors, such as power management, battery consumption, artificial intelligence, and M2M optimization, need to be considered as being crucial for improvising the utilization of these vehicles in day-to-day transportation in order to achieve smart transportation.
3. Results
3.1. Road Traffic Accident Data Analysis
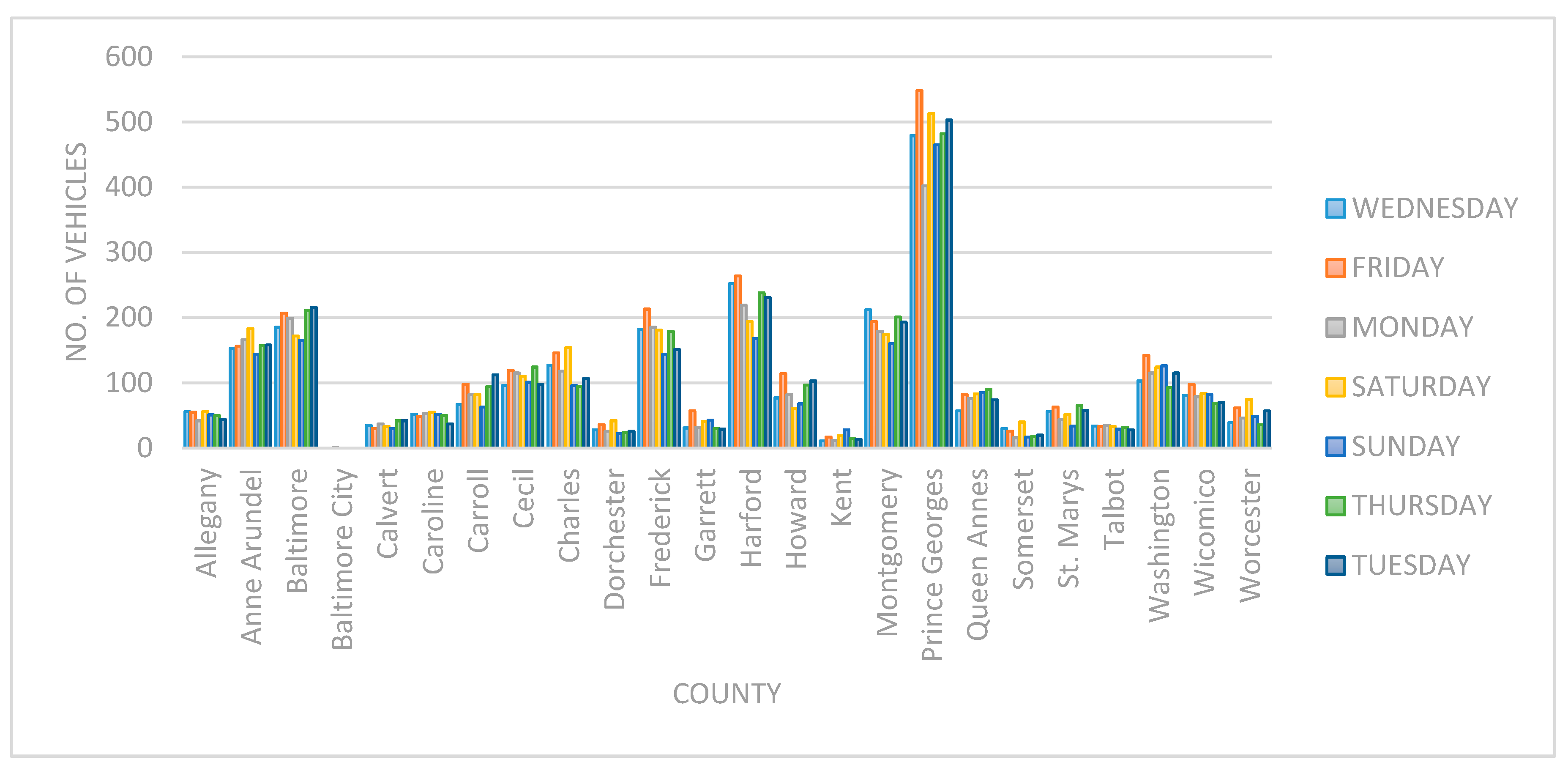
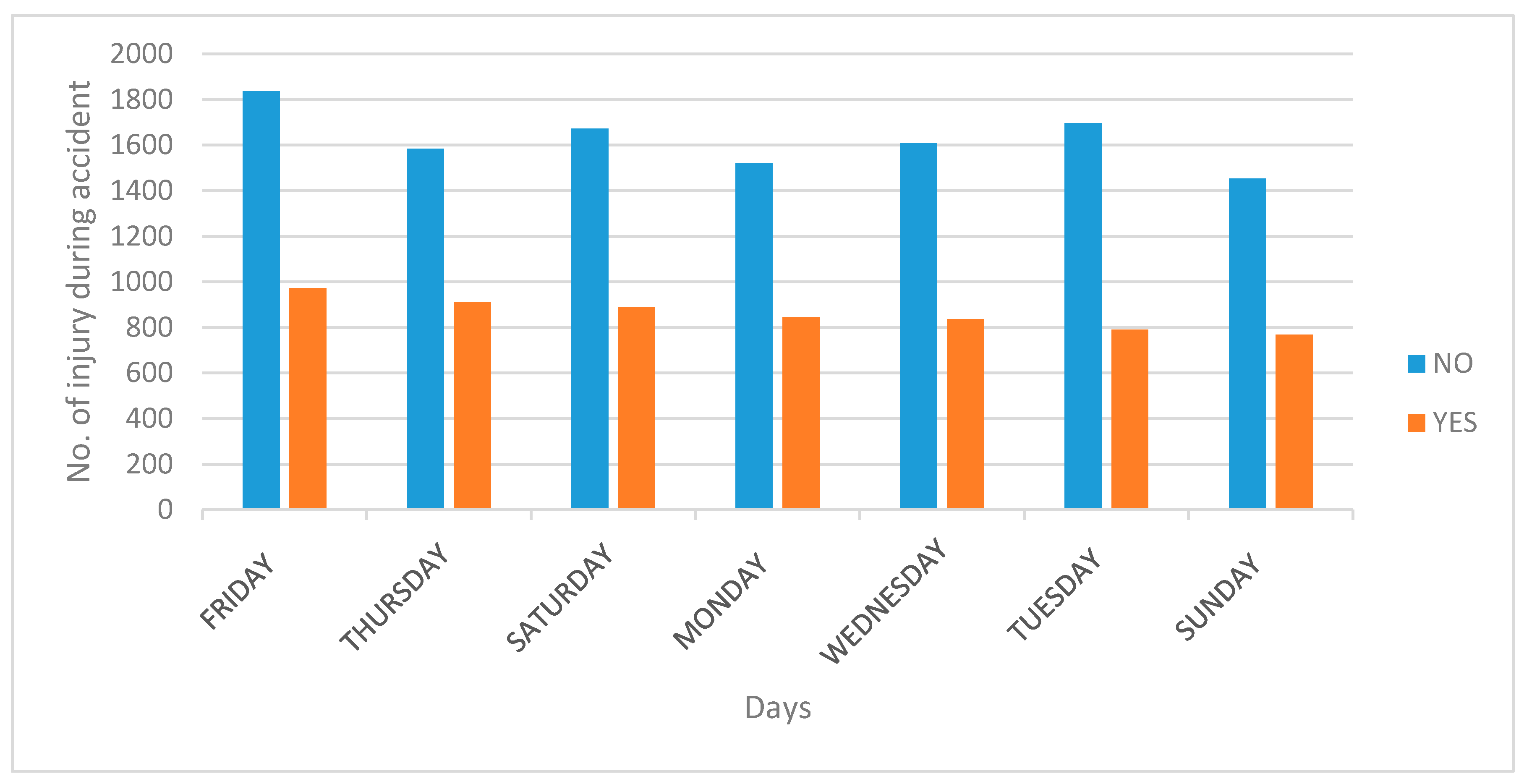
Various datasets of road traffic accidents in different places were analyzed; the results are discussed here. Figure 2 shows a graph of road traffic accident data, which were collected by the Maryland police department in the year 2012. The graph was prepared from an analysis of the accident dataset [39], which was downloaded from the US government’s data catalog. The graph shows that a higher number of road accidents, i.e., vehicle collisions, occurred during the weekends—from Friday to Sunday—in various counties of the US state of Maryland. These graph results will be applicable to most places in various countries, since road traffic flow is generally more on weekends. Hence, more attention should be paid to road traffic flow on weekends in order to prevent unnecessary road traffic accidents caused by factors such as vehicle collisions. Figure 3 shows the number of driver/passenger injuries caused by vehicle collisions or road traffic accidents. This graph was also prepared from an analysis of the accident dataset [39].
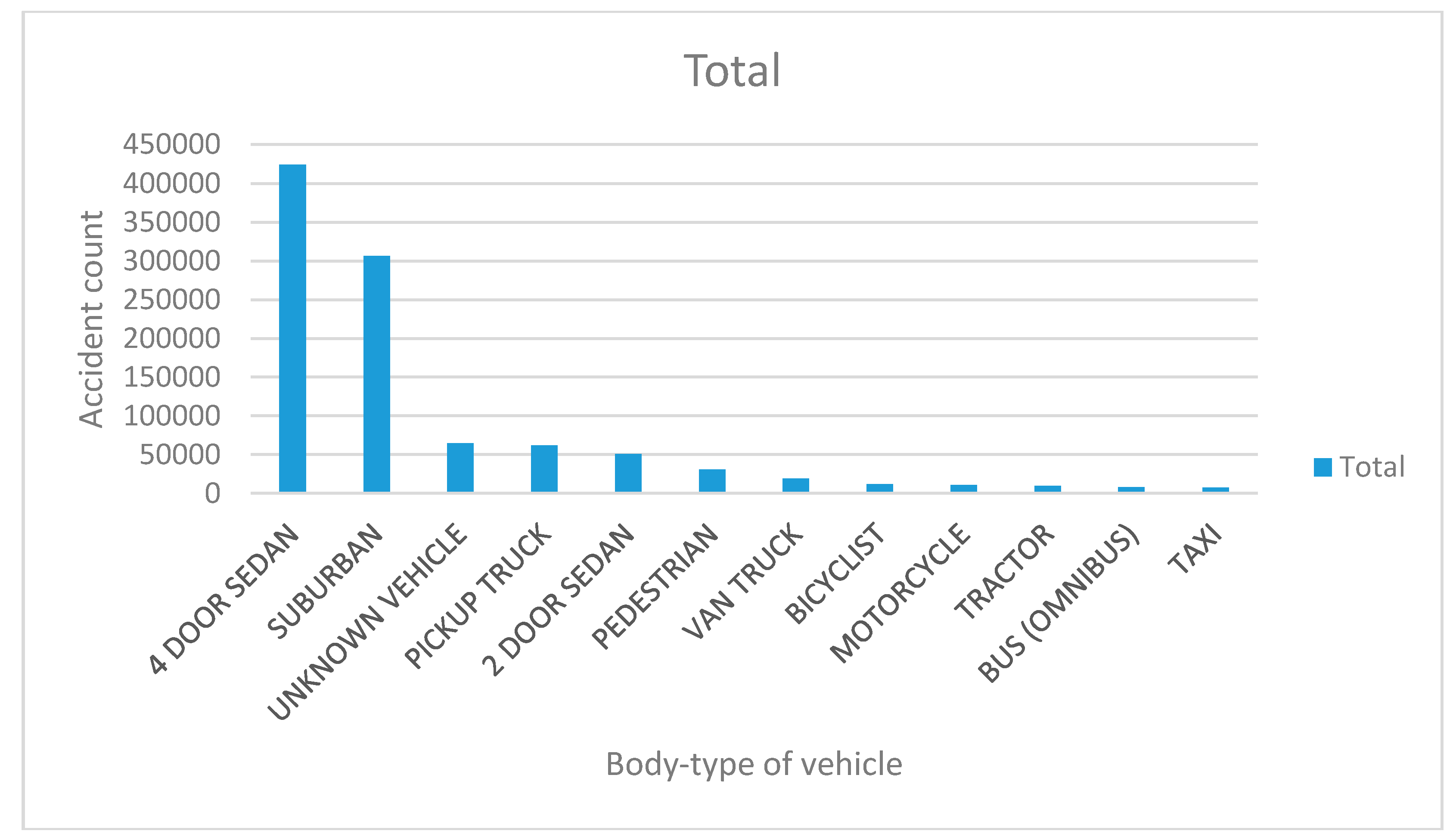
Figure 4 shows accident data for the three-year period of 2012–2014 in New York state [40]; the accident data are plotted according to the vehicle body type. From the graph, it is obvious that four-door sedans were involved in more accidents than were other vehicle body types.
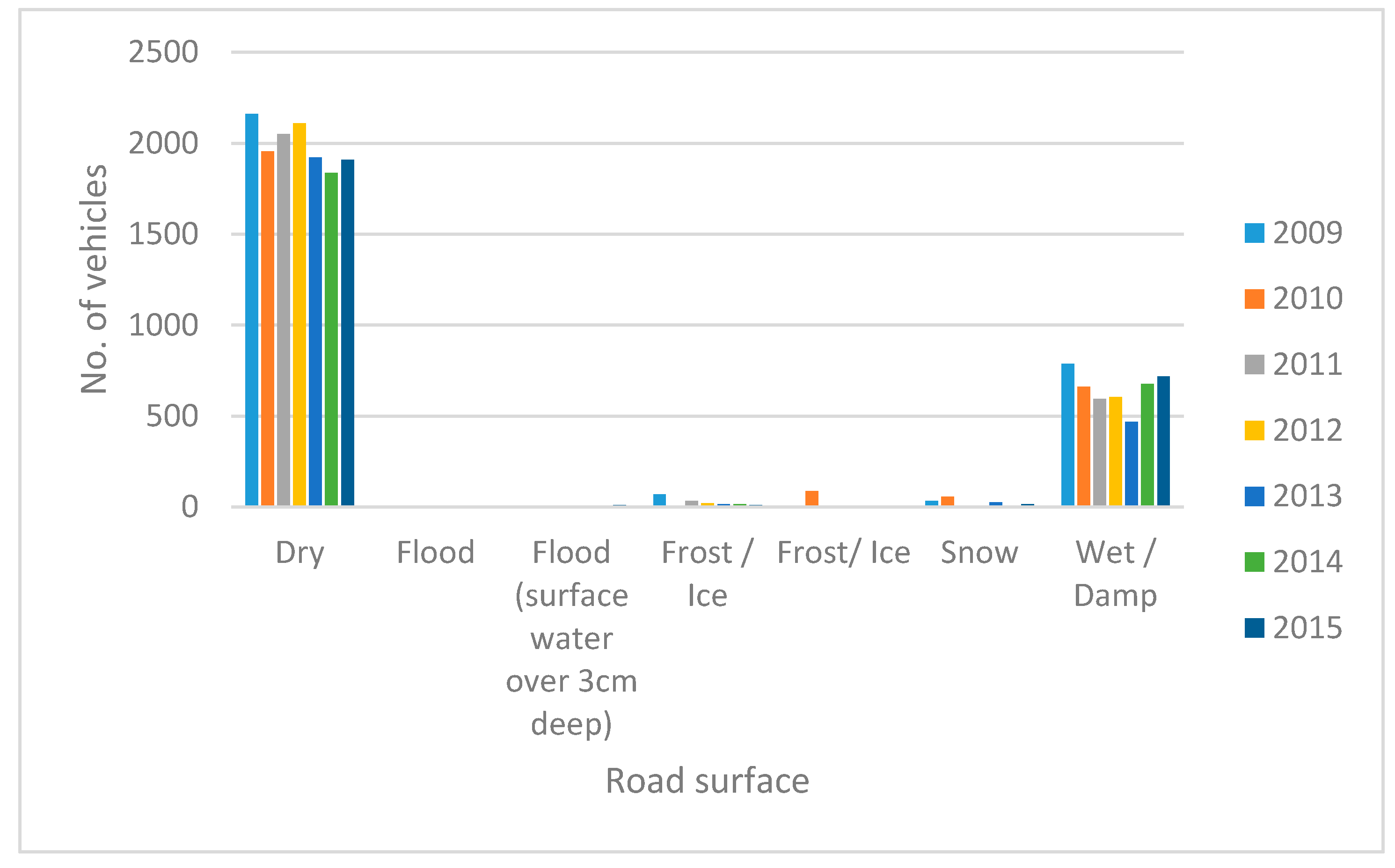
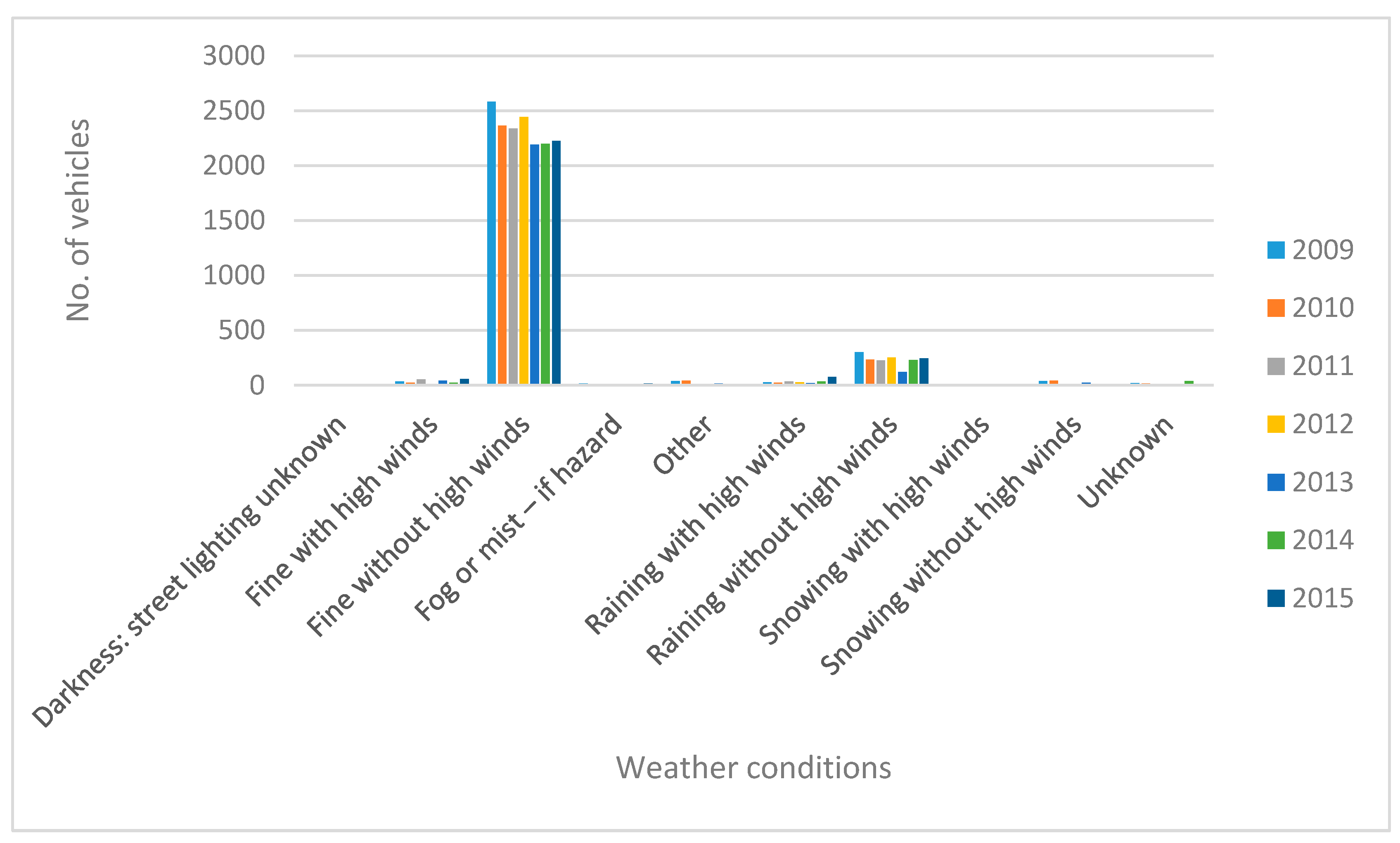
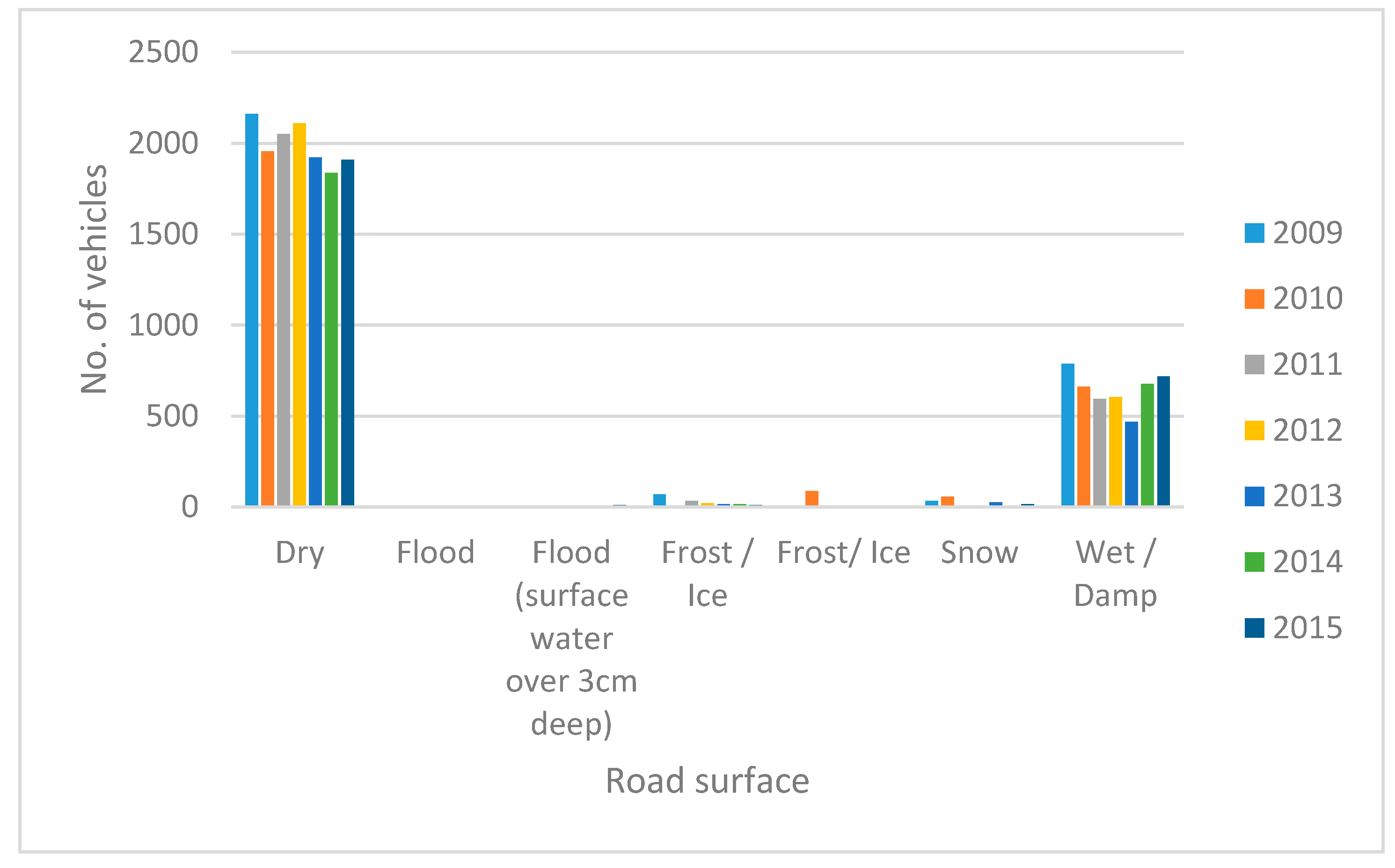
Figure 5 and Figure 6 show analysis results of accident data [41] for the city of Leeds for the period of 2009–2015. This accident dataset includes the number of people, the number of vehicles involved, the road surface conditions, the weather conditions, the severity of casualties, and so on. Figure 5 shows the number of accidents as a function of weather conditions; this figure reveals that more accidents occurred in fine weather without high winds and during rains without high winds. Furthermore, the number of accidents in these two scenarios was almost consistent in all years from 2009–2015. Figure 6 shows the number of accidents as a function of the road surface conditions; this figure reveals that more accidents occurred on dry road surfaces and wet/damp road surfaces. In this case, too, the number of accidents under these two road surface conditions was almost consistent in all years from 2009 to 2015. Road traffic accidents can be reduced to a moderate extent by taking appropriate precautionary steps based on the analysis reports of the weather-based and road-surface-based accident data. Such a moderate reduction in accidents, in turn, would lead to the development of effective transportation systems, which would further pave the way for sustainable transportation.
3.2. Comparative Analysis of Existing Methodologies
From Table 1, it is evident that the various existing methodologies are focused on sustainable transportation in terms of achieving various sustainability characteristics. For example, the methodologies that address pollution control, carbon emission control, and energy consumption do not focus on road traffic safety, and, conversely, methodologies that address road traffic safety and driver/passenger safety do not focus on pollution control, carbon emission control, and energy consumption. However, all of the above-listed sustainability characteristics need to be achieved in order to develop an efficient transportation planning system, which would lead to sustainability in the transportation sector. In the following tables √ means ‘yes’ and ‘×’ means ‘no’.
4. Discussion
The emergence of smart technologies in present times has led people to expect the implementation of smart transportation to meet their day-to-day travel needs. The authors of the present study suggest development of an autonomous smart vehicle or autonomous smart car that incorporates all the above-mentioned methodologies, along with weather- and road-surface-assistance technologies and achieves the above-listed sustainability characteristics. The above-described accident data analysis report based on weather conditions and road surface conditions would aid in taking necessary precautionary measures to prevent vehicle collisions. Autonomous vehicles are expected to be the next-generation vehicles in the transportation sector; hence, smarter utilization of autonomous vehicles in various ways, for example, in the form of autonomous taxis, will potentially enhance transportation to make it smarter. The realization of this futuristic suggestion will require considerable effort; however, development of such futuristic technology will pave the way for easier, smarter, safer, and more sustainable transportation.
Acknowledgments
This study was supported by the National Research Foundation of Korea (NRF) grant funded by the Korean government (NRF-2017R1C1B5017464). This study was also supported by the National Research Foundation of Korea (NRF) grant funded by the Korean government (MSIP) (NRF-2016R1A2A1A05005459). The grant covered the research work, as well as the publication costs for open access publishing.
Author Contributions
Anandkumar Balasubramaniam prepared the comparative analysis report. Anand Paul established the entire framework of the study and selected the tools to be used. Won-Hwa Hong reviewed this work and suggested improving it by making use of various datasets. Hyuncheol Seo used the selected tools for performing simulations.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Figueiredo, L.; Jesus, I.; Machado, J.A.T.; Ferreira, J.R.; Martins de Carvalho, J.L. Towards the Development of Intelligent Transportation Systems. In Proceedings of the 2001 IEEE Intelligent Transportation Systems, Oakland, CA, USA, 25–29 August 2001; pp. 1206–1211. [Google Scholar]
- Datta, S.K.; Harri, J.; Bonnet, C.; Rui, F.D.C. Vehicles as Connected Resources. IEEE Veh. Technol. Mag. 2017, 12, 26–35. [Google Scholar] [CrossRef]
- Paul, A.; Chilamkurti, N.; Daniel, A.; Rho, S. Intelligent Vehicular Networks and Communications: Fundamentals, Architectures and Solutions; Elsevier: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Yang, F.; Wang, S.; Li, J.; Liu, Z.; Sun, Q. An overview of Internet of Vehicles. China Commun. 2014, 11, 1–15. [Google Scholar] [CrossRef]
- Uhlemann, E. ITS frequency bands are being debated [Connected Vehicles]. IEEE Veh. Technol. Mag. 2016, 11, 12–14. [Google Scholar] [CrossRef]
- Cheng, L.; Henty, B.E.; Stancil, D.D.; Bai, F.; Mudalige, P. Mobile vehicle-to-vehicle narrow-band channel measurement and characterization of the 5.9 GHz Dedicated Short Range Communication (DSRC) frequency band. IEEE J. Sel. Areas Commun. 2007, 25, 1501–1516. [Google Scholar] [CrossRef]
- Statista. Number of Vehicles in Use Worldwide 2006–2014. Available online: https://www.statista.com/statistics/281134/number-of-vehicles-in-use-worldwide/ (accessed on 12 February 2017).
- World Health Organization. Road Safety, Estimated Number of Road Traffic Deaths. 2013. Available online: http://gamapserver.who.int/gho/interactive_charts/road_safety/road_traffic_deaths/atlas.html (accessed on 12 February 2017).
- Grob, G.R.; Iseo, E.S. Future Transportation with Smart Grids & Sustainable Energy. In Proceedings of the SSD 2009 6th International Multi-Conference on Systems, Signals and Devices, Djerba, Tunisia, 23–26 March 2009. [Google Scholar]
- Mehar, S.; Zeadally, S.; Remy, G.; Senouci, S.M. Sustainable transportation management system for a fleet of electric vehicles. IEEE Trans. Intell. Trans. Syst. 2015, 16, 1–14. [Google Scholar] [CrossRef]
- Iturrate, M.; Gurrutxaga, I.; Oses, U.; Calvo, P.M. Sustainable Transport at the University of the Basque Country in San Sebastian. In Proceedings of the 2015 4th International Work Conference on Bioinspired Intelligence (IWOBI), San Sebastian, Spain, 10–12 June 2015; pp. 15–20. [Google Scholar]
- Harilakshmi, V.S.; Rani, P.A.J. Intelligent Vehicle Counter—A Road to Sustainable Development and Pollution Prevention (P2). In Proceedings of the 2016 International Conference on Energy Efficient Technologies for Sustainability (ICEETS), Nagercoil, India, 7–8 April 2016; pp. 877–880. [Google Scholar]
- Fabbri, G.; Medaglia, C.M.; Ippolito, M.; Saraceno, E.; Antonucci, M.; Fiorentino, L.; Bistolfi, M.; Cozzolino, P.; Gallarate, M. An Innovative System for a Clean and Sustainable Public Transport System in Smart Cities. In Proceedings of the 2016 IEEE 25th International Symposium on Industrial Electronics (ISIE), Santa Clara, CA, USA, 8–10 June 2016; pp. 974–979. [Google Scholar]
- Abdalla, A.M.; Abaker, M. A Survey on Automobile Collision Avoidance System. Int. J. Recent Trends Eng. Res. 2016, 2, 1–6. [Google Scholar]
- Abid, H.; Phuong, L.T.T.; Wang, J.; Lee, S.; Qaisar, S. V-Cloud: Vehicular Cyber-Physical Systems and Cloud Computing. In Proceedings of the 4th International Symposium on Applied Sciences in Biomedical and Communication Technologies, Barcelona, Spain, 26–29 October 2011; pp. 1–5. [Google Scholar]
- Mbachu, C.B.; Onuora, O.N. A vehicular accident detection and avoidance system for protecting passengers and vehicles. Eur. J. Eng. Technol. 2014, 2, 70–76. [Google Scholar]
- Jurecki, R.S. An analysis of collision avoidance maneuvers in emergency traffic situations. Arch. Automot. Eng. Arch. Motoryzac. 2016, 72, 73–93. [Google Scholar]
- Hamid, U.Z.A.; Pushkin, K.; Zamzuri1, H.; Gueraiche, D.; Rahman, M.A.A. Current Collision Mitigation Technologies for Advanced Driver Assistance Systems—A Survey. Perintis. J. 2016, 6, 78–90. [Google Scholar]
- Daniel, A.; Karthik; Paul, A.; Rajkumar, N.; Rho, S. Big autonomous vehicular data classifications: Towards procuring intelligence in ITS. Veh. Commun. 2017, 1, 1–7. [Google Scholar] [CrossRef]
- Zhang, Y.; Zheng, J.; Lu, P.S.; Sun, C. Interference Graph Construction for Cellular D2D Communications. IEEE Trans. Veh. Technol. 2017, 66, 3293–3305. [Google Scholar] [CrossRef]
- Daniel, A.; Paul, A.; Ahmad, A.; Rho, S. Cooperative Intelligence of Vehicles for Intelligent Transportation Systems (ITS). Wirel. Pers. Commun. 2016, 87, 461–484. [Google Scholar] [CrossRef]
- Paul, A.; Daniel, A.; Ahmad, A.; Rho, S. Cooperative cognitive intelligence for internet of vehicles. IEEE Syst. J. 2015, PP, 99. [Google Scholar] [CrossRef]
- Fredette, D. Swarm-Inspired Modeling of a Highway System. IEEE Trans. Intell. Trans. Syst. 2017, 18, 1371–1379. [Google Scholar]
- Paul, A. Graph Based M2M Optimization in an IoT Environment. Proceeding of the 2013 Research in Adaptive and Convergent Systems, Montreal, QC, Canada, 1–4 October 2013; pp. 45–46. [Google Scholar]
- Paul, A.; Ahmad, A.; Rathore, M.M.; Jabbar, S. Smartbuddy: Defining human behaviors using big data analytics in social internet of things. IEEE Wirel. Commun. 2016, 23, 68–74. [Google Scholar] [CrossRef]
- Costa, E.; Seixas, J. Contribution of Electric Cars to the Mitigation of CO2 Emissions in the City of São Paulo. In Proceedings of the 2014 IEEE Vehicle Power and Propulsion Conference (VPPC), Coimbra, Portugal, 27–30 October 2014. [Google Scholar]
- Zhang, F.; Guo, F.; Huang, H. A Research on Driving Cycle for Electric Cars in Beijing. In Proceedings of the 28th Chinese Control and Decision Conference (2016 CCDC), Yinchuan, China, 28–30 May 2016; Volume 100081, pp. 4450–4455. [Google Scholar]
- Sriwilai, A.; Pattaraprakorn, W. The Study on the Effect of Electric Car to Energy. In Proceedings of the 2016 13th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Chiang Mai, Thailand, 28 June–1 July 2016. [Google Scholar]
- Parent, M. Advanced urban transport: Automation is on the way. IEEE Intell. Syst. 2007, 22, 9–11. [Google Scholar] [CrossRef]
- Khan, B.S.; Hanafi, M.; Mashohor, S. Automated road marking detection system for autonomous car. In Proceedings of the 2015 IEEE Student Conference on Research and Development (SCOReD), Kuala Lumpur, Malaysia, 13–14 December 2015; pp. 398–401. [Google Scholar]
- Li, L.; Liu, Y.; Wang, J.; Deng, W.; Oh, H. Human dynamics based driver model for autonomous car. IET Intell. Transp. Syst. 2016, 10, 545–554. [Google Scholar] [CrossRef]
- Kamran, D.; Karimian, M.; Nazemipour, A.; Manzuri, M.T. Online Visual Gyroscope for Autonomous Cars. In Proceedings of the 2016 ICEE 24th Iranian Conference on Electrical Engineering, Shiraz University, Shiraz, Iran, 10–12 May 2016; pp. 113–118. [Google Scholar]
- Nguyen, V.; Tran, O.; Kim, T.; Dang, T.N.; Moon, S.I.; Hong, C.S. An Efficient and Reliable Green Light Optimal Speed Advisory System for Autonomous Cars. In Proceedings of the 18th Asia-Pacific Network Operations and Management Symposium, Kanazawa, Japan, 5–7 October 2016; pp. 7–10. [Google Scholar]
- Paul, A.; Rho, S. Probabilistic Model for M2M in IoT Networking and Communication. Telecommun. Syst. 2016, 62, 59–66. [Google Scholar] [CrossRef]
- Shen, H.; Zhu, Y.; Liu, T.; Jin, L. Particle Swarm Optimization in Solving Vehicle Routing Problem. In Proceedings of the Second International Conference on Intelligent Computation Technology and Automation, Changsha, China, 10–11 October 2009; Volume 1, pp. 287–291. [Google Scholar]
- Paul, A.; Victoire, T.A.A.; Jeyakumar, A.E. Particle Swarm Approach for Retiming in VLSI. In Proceedings of the 2003 IEEE 46th Midwest Symposium on Circuits and Systems, Cairo, Egypt, 27–30 December 2003. [Google Scholar]
- Paul, A. Real-Time Power Management for Embedded M2M Using Intelligent Learning Methods. ACM Trans. Embed. Comput. Syst. 2014, 13, 1–22. [Google Scholar] [CrossRef]
- Qian, X.; Ukkusuri, S.V. Time-of-Day Pricing in Taxi Markets. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1610–1622. [Google Scholar] [CrossRef]
- Data Catalog. 2012 Vehicle Collisions Investigated by State Police. Available online: https://catalog.data.gov/dataset/2012-vehicle-collisions-investigated-by-state-police-4fcd0 (accessed on 14 February 2017).
- Data.gov. Motor Vehicle Crashes—Vehicle Information: Three Year Window. Available online: https://catalog.data.gov/dataset/motor-vehicle-crashes-vehicle-information-beginning-2009 (accessed on 14 February 2017).
- Data.gov.UK. Datasets—Road Traffic Accidents. Available online: https://data.gov.uk/dataset/road-traffic-accidents (accessed on 15 February 2017).
Figure 1.
Global usage of passenger cars and commercial vehicles in the 2006–2014 period.
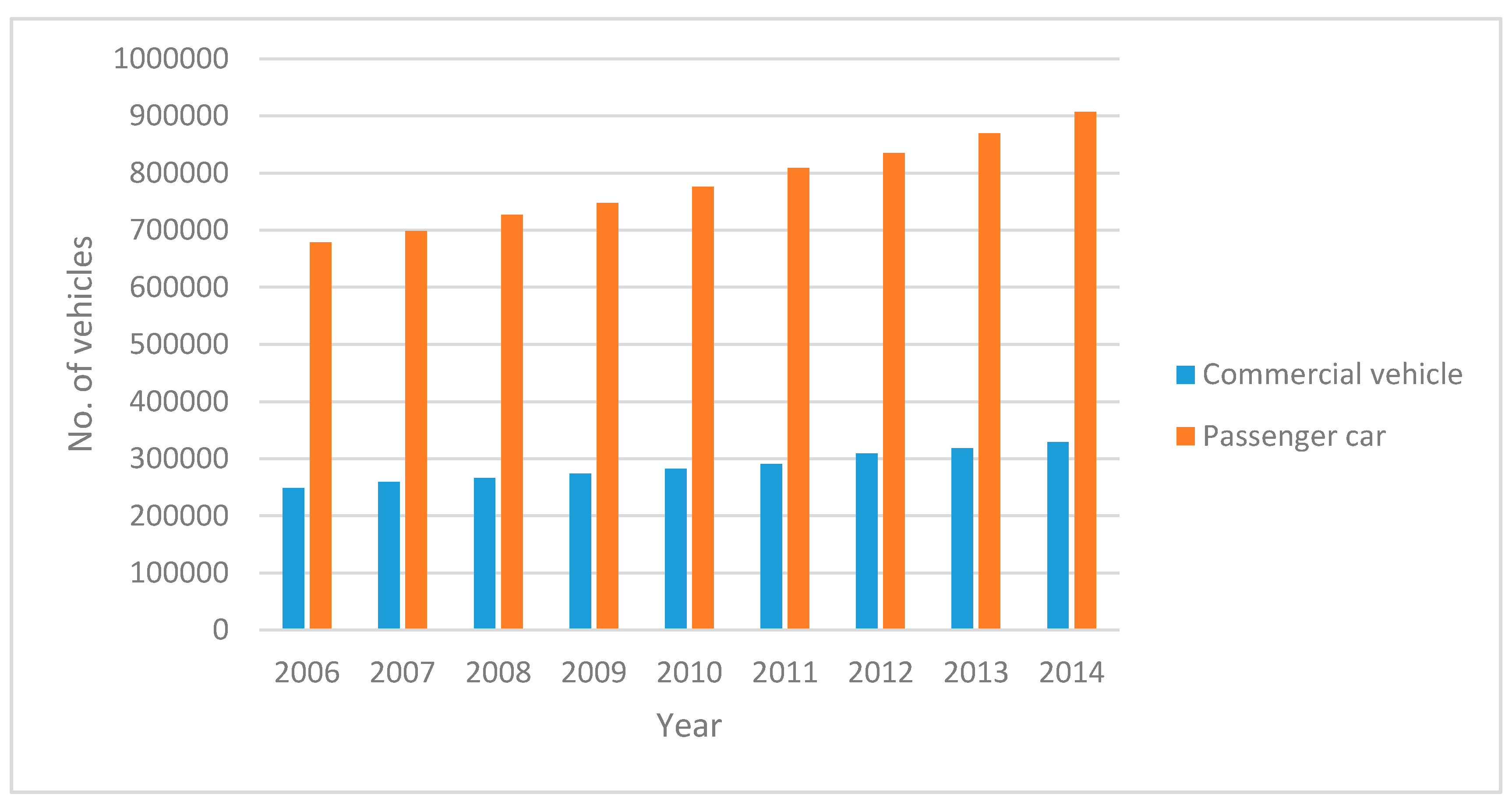
Figure 2.
County-wise road traffic accident data collected by Maryland police departments in 2012.
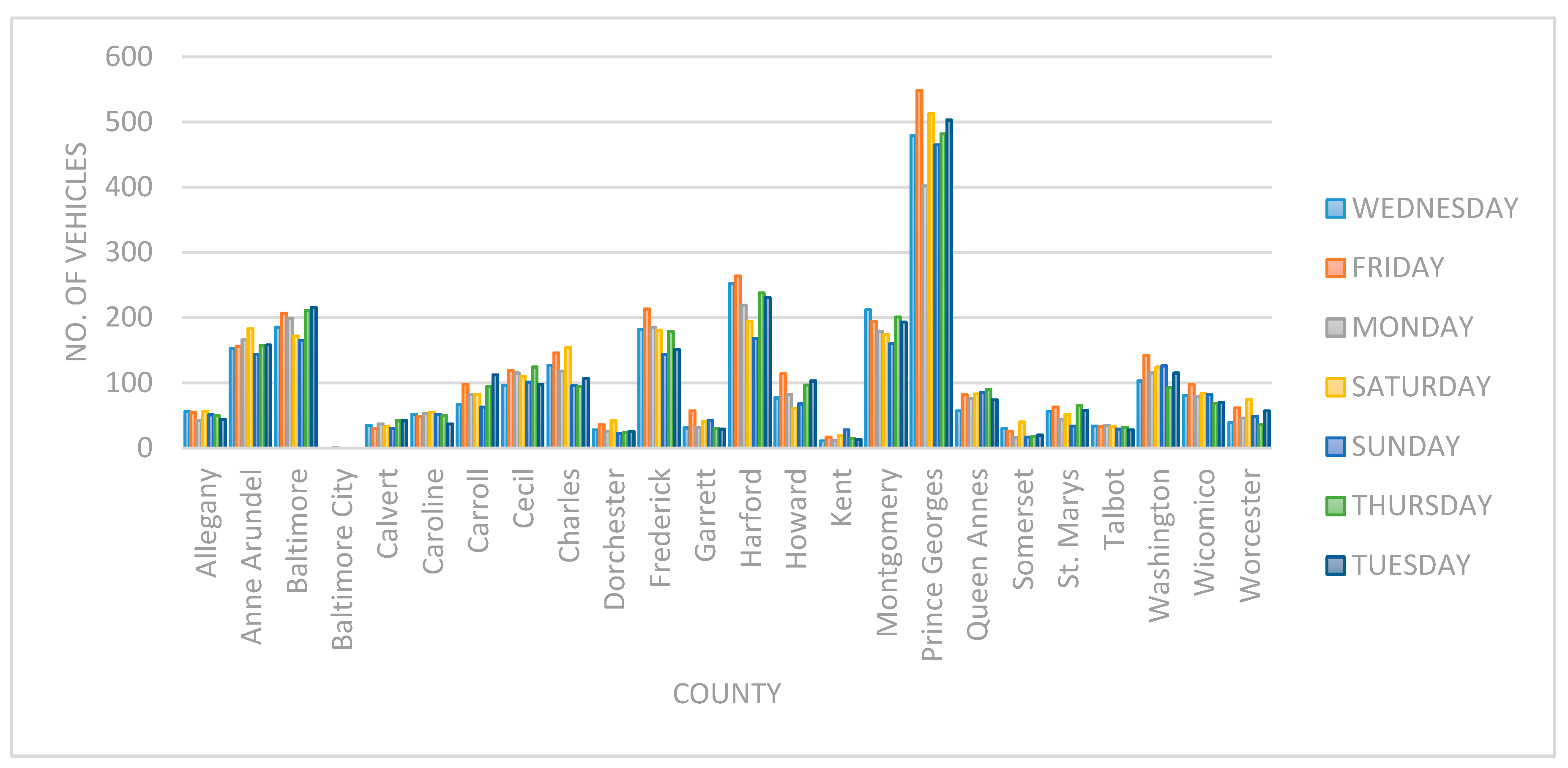
Figure 3.
Data on injuries caused by road traffic accidents.
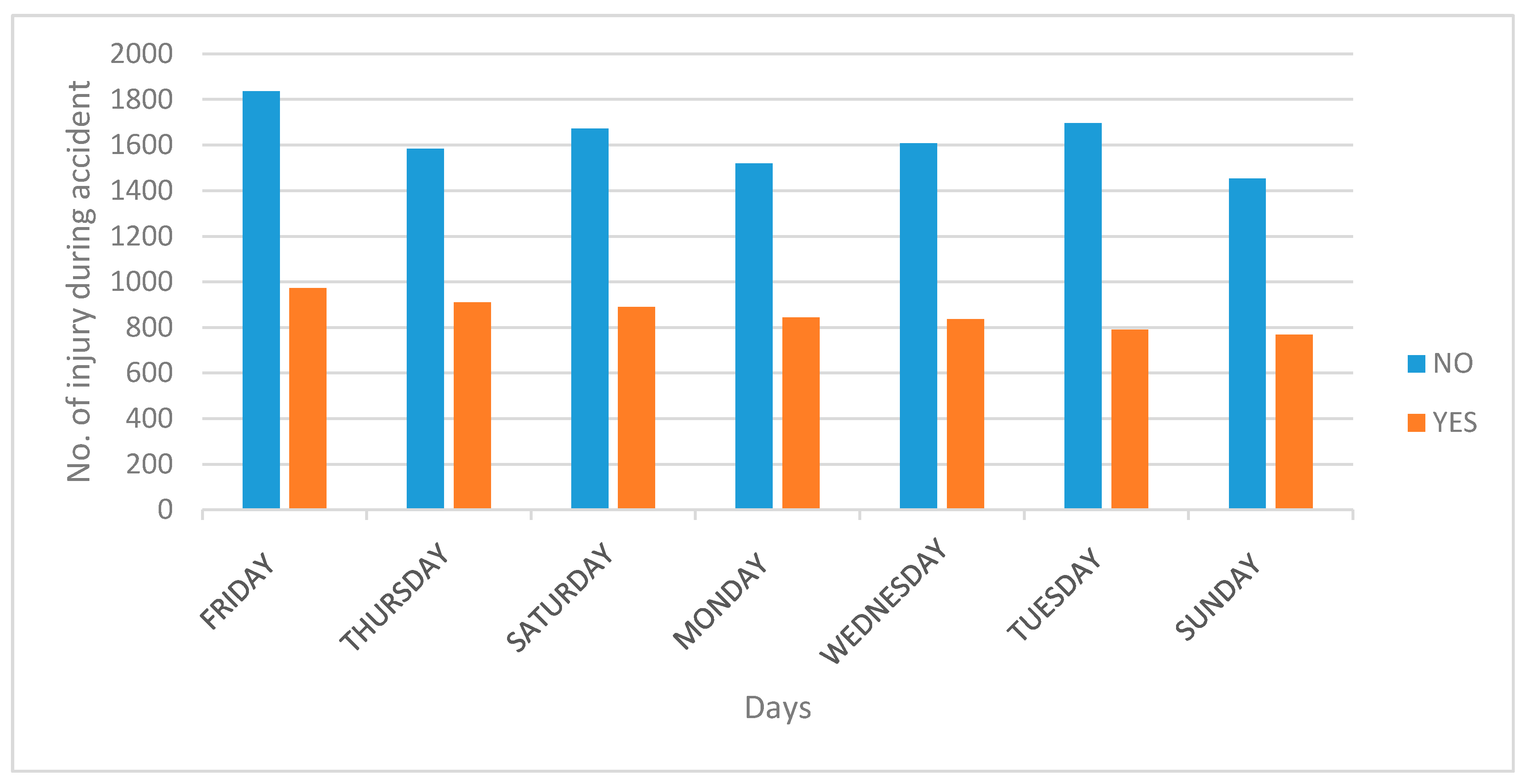
Figure 4.
Accident data for three-year period in New York state.
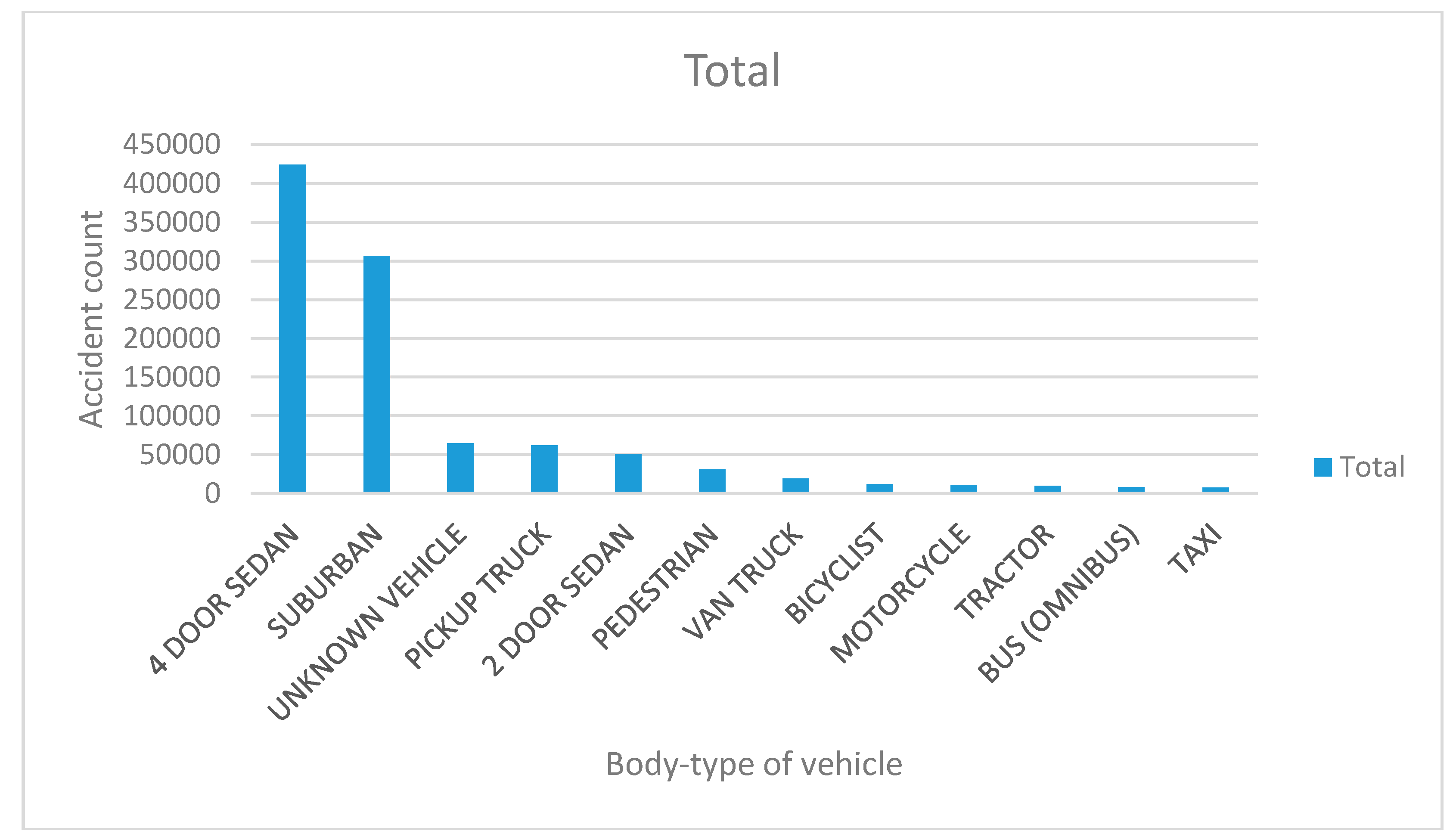
Figure 5.
Number of accidents as a function of weather conditions.
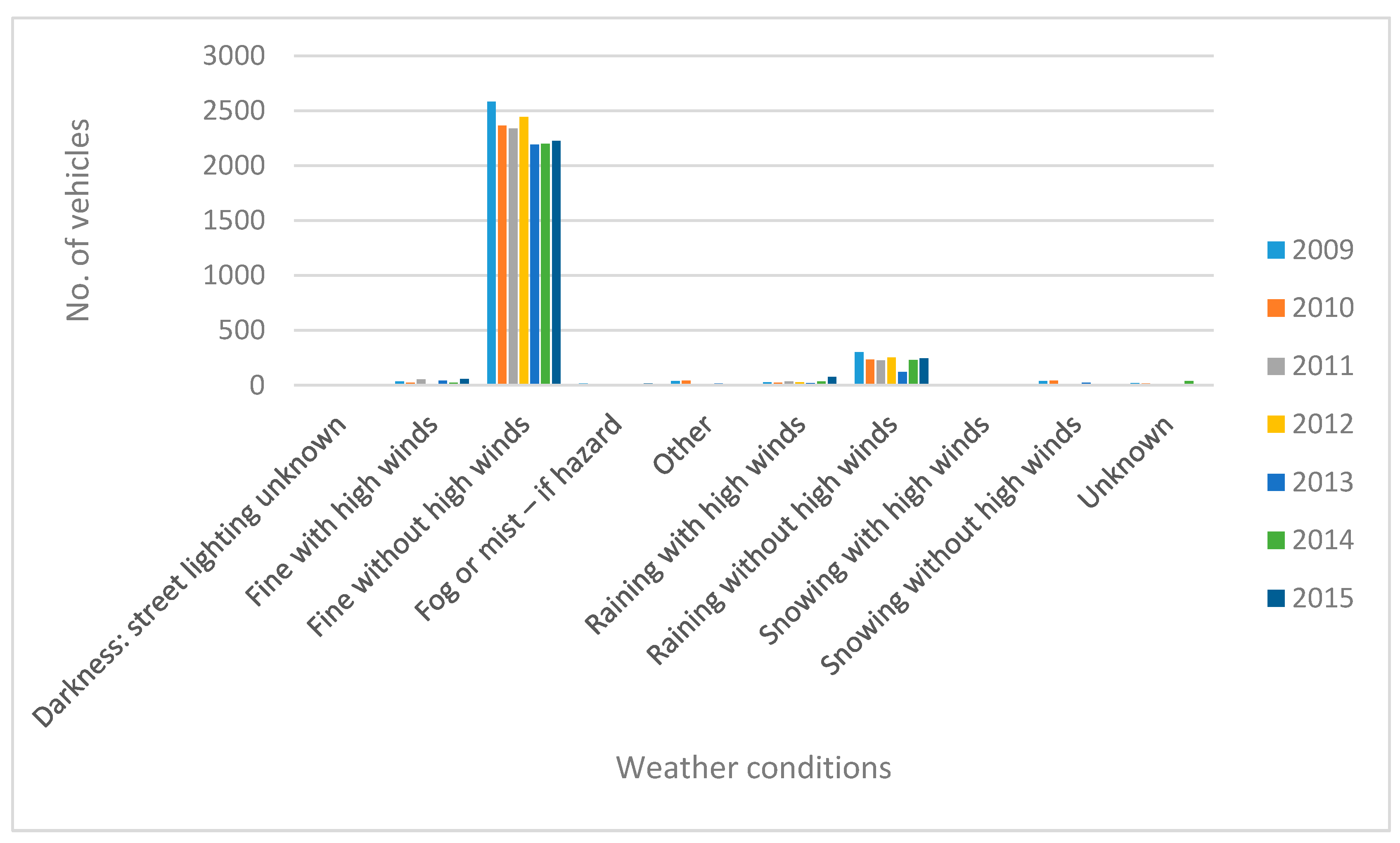
Figure 6.
Number of accidents as a function of road surface conditions.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Comparative analysis of various existing methodologies.
| Sr. No. | Publication | Year | Methodology | Pollution-Free 1 | Carbon Emission Control 1 | Efficient Energy Consumption 1 | Road Traffic Safety 1 | Driver/Passenger Safety 1 |
|---|---|---|---|---|---|---|---|---|
| 1 | [9] | 2009 | Green Transportation | √ | √ | √ | × | × |
| 2 | [10] | 2015 | Green Transportation | √ | √ | √ | × | × |
| 3 | [11] | 2015 | Green Transportation | √ | √ | √ | × | × |
| 4 | [12] | 2016 | Green Transportation | √ | × | × | × | × |
| 5 | [13] | 2016 | Green Transportation | √ | √ | √ | Weak focus | Weak focus |
| 6 | [14] | 2005 | Collision Avoidance | × | × | × | √ | √ |
| 7 | [15] | 2011 | Collision Avoidance | × | × | × | √ | √ |
| 8 | [16] | 2014 | Collison Avoidance | × | × | × | √ | √ |
| 9 | [17] | 2016 | Collision Avoidance | × | × | × | √ | √ |
| 10 | [18] | 2016 | Collision Avoidance | Weak focus | × | Weak focus | √ | √ |
| 11 | [26] | 2014 | Electric Vehicle | √ | √ | √ | × | × |
| 12 | [27] | 2016 | Electric Vehicle | √ | Weak focus | × | √ | × |
| 13 | [28] | 2016 | Electric Vehicle | √ | √ | √ | × | × |
| 14 | [30] | 2015 | Autonomous Vehicle | √ | × | × | Weak focus | × |
| 15 | [31] | 2016 | Autonomous Vehicle | √ | × | × | Weak focus | × |
| 16 | [32] | 2016 | Autonomous Vehicle | √ | × | × | Weak focus | × |
| 17 | [33] | 2016 | Autonomous Vehicle | √ | Weak focus | Weak focus | Weak focus | Weak focus |
1 Sustainability characteristics.
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Balasubramaniam, A.; Paul, A.; Hong, W.-H.; Seo, H.; Kim, J.H. Comparative Analysis of Intelligent Transportation Systems for Sustainable Environment in Smart Cities. Sustainability 2017, 9, 1120. https://doi.org/10.3390/su9071120
AMA Style
Balasubramaniam A, Paul A, Hong W-H, Seo H, Kim JH. Comparative Analysis of Intelligent Transportation Systems for Sustainable Environment in Smart Cities. Sustainability. 2017; 9(7):1120. https://doi.org/10.3390/su9071120
Chicago/Turabian StyleBalasubramaniam, Anandkumar, Anand Paul, Won-Hwa Hong, HyunCheol Seo, and Jeong Hong Kim. 2017. "Comparative Analysis of Intelligent Transportation Systems for Sustainable Environment in Smart Cities" Sustainability 9, no. 7: 1120. https://doi.org/10.3390/su9071120
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.