HF Radar Bistatic Measurement of Surface Current Velocities: Drifter Comparisons and Radar Consistency Checks

Abstract
:
1. Introduction

2. Operation of a Bistatic Network

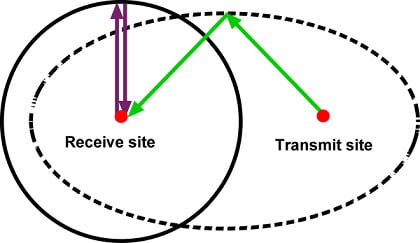
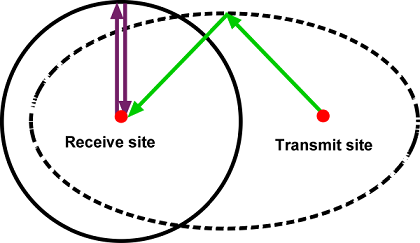
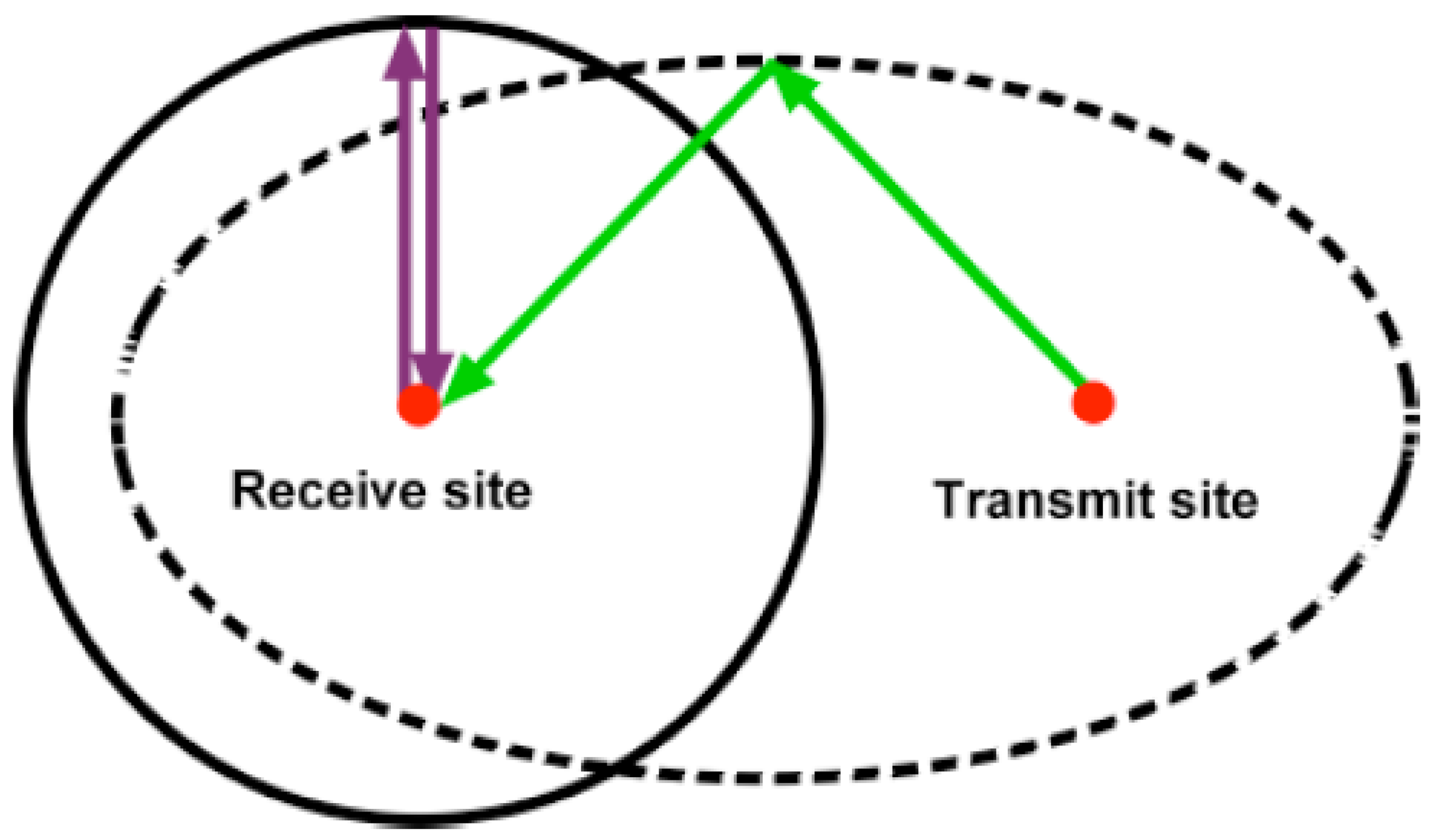
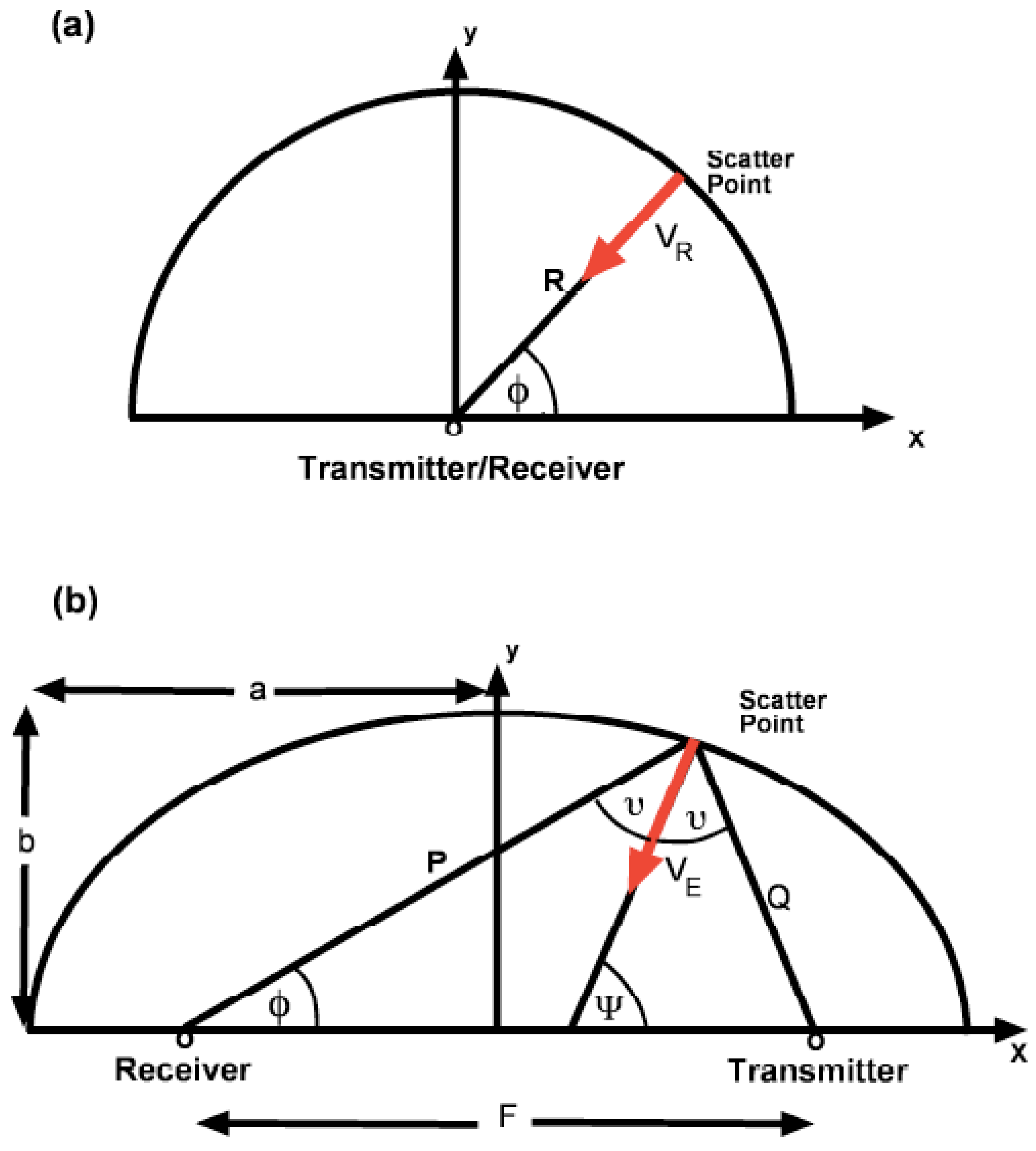
3. Derivation of Radial and Elliptical Velocities
3.1. Radial Velocities



3.2. Elliptical Velocities
3.3. Averaging and Uncertainties in Seasonde Radial and Elliptical Velocities
4. Drifter Comparisons and Radar Consistency Checks
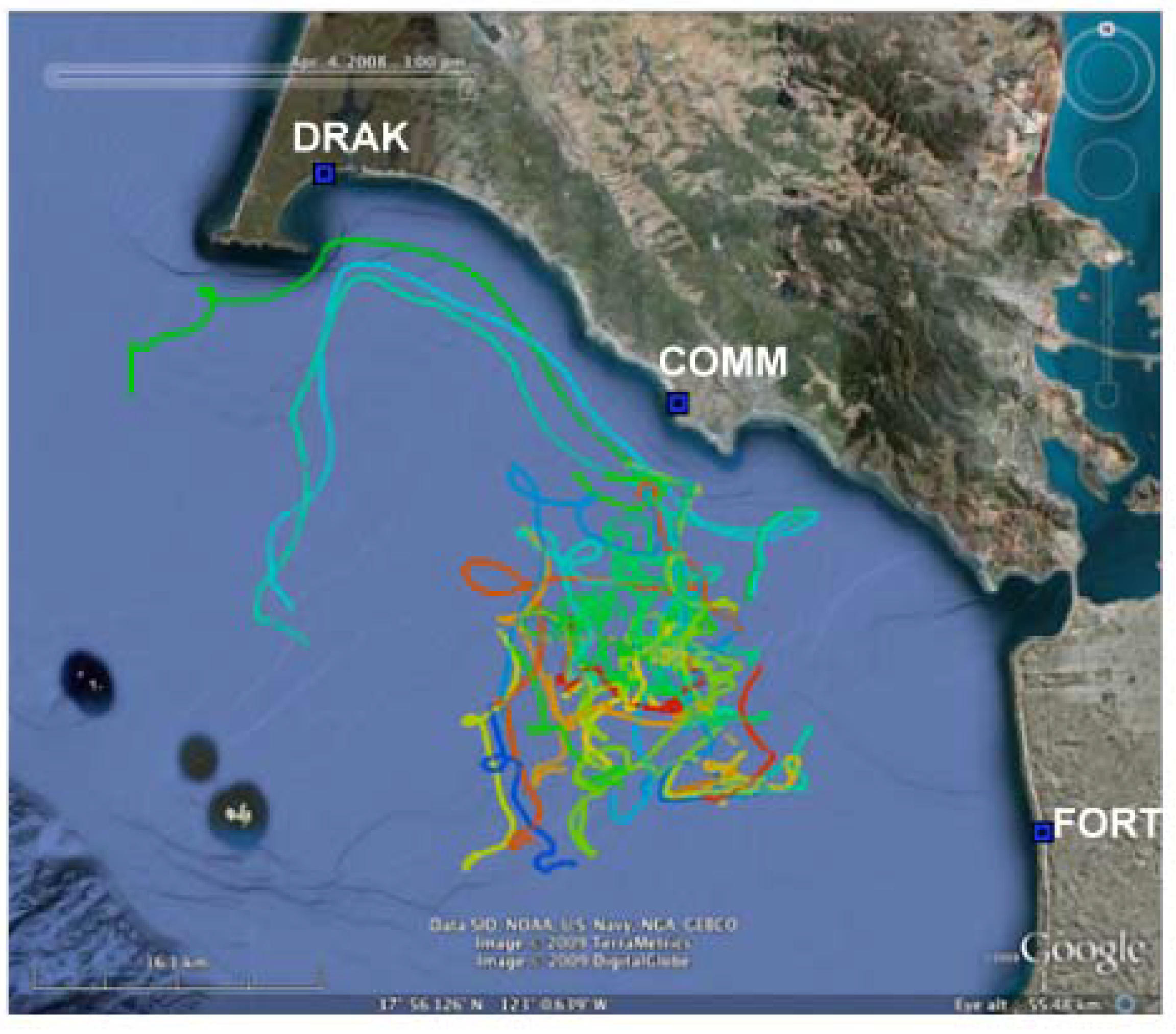
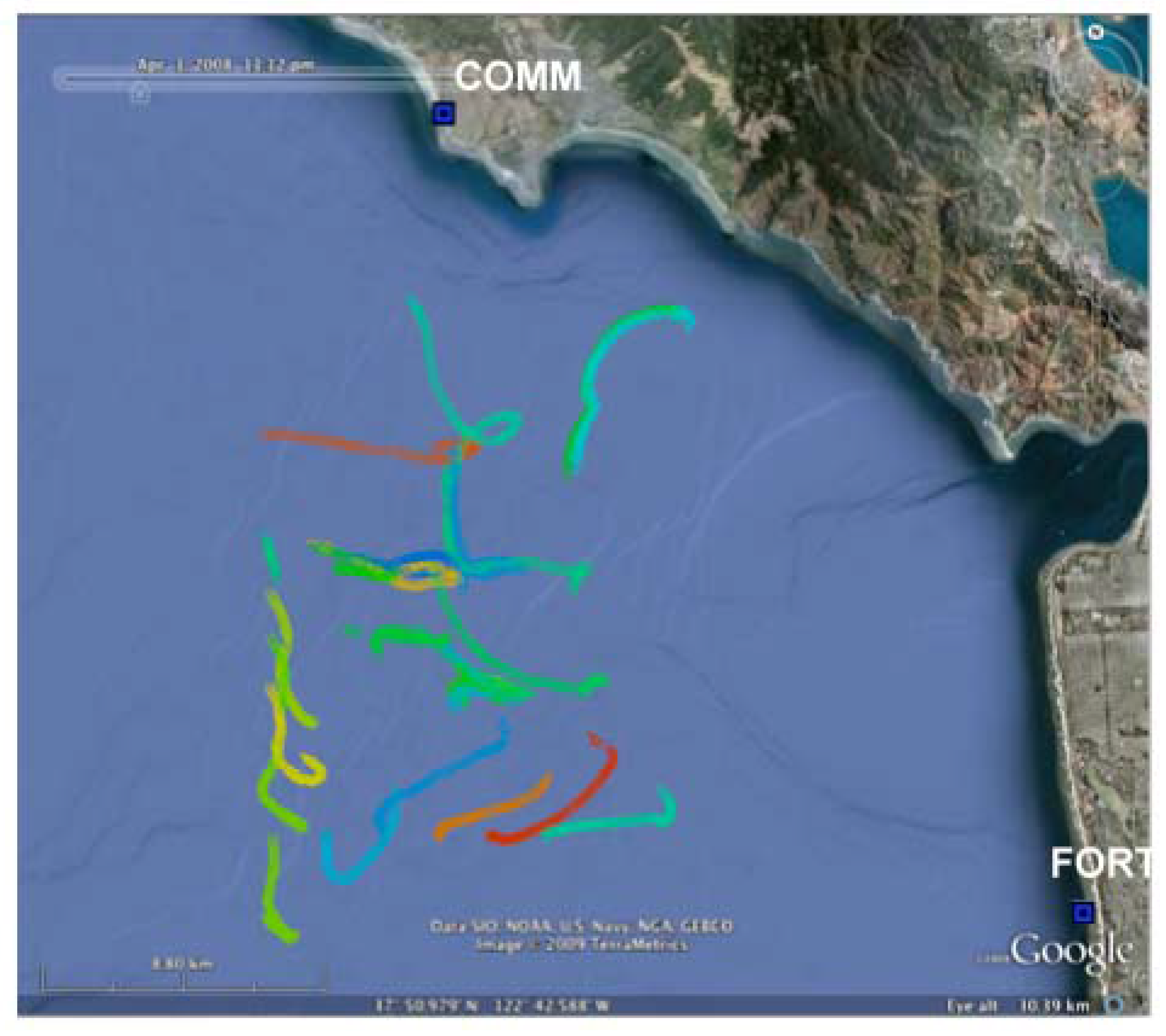
4.1. Drifter and Radar Measurements


4.2. Radar Consistency Checks

- (a)
- Consistency between measured radials and radials from a third site.The total vector calculated from COMM/FORT radials was resolved in the direction pointing towards a third radar (DRAK) and the radials obtained from the totals were compared with those measured by DRAK. The comparison was restricted to cases for which there were at least 3 radial vectors from FORT, COMM and DRAK within the averaging circle. The unstable baseline region between the radar sites was excluded.
- (b)
- Consistency between measured radials and elliptical.
4.3. Comparison Methods and Results
- (1)
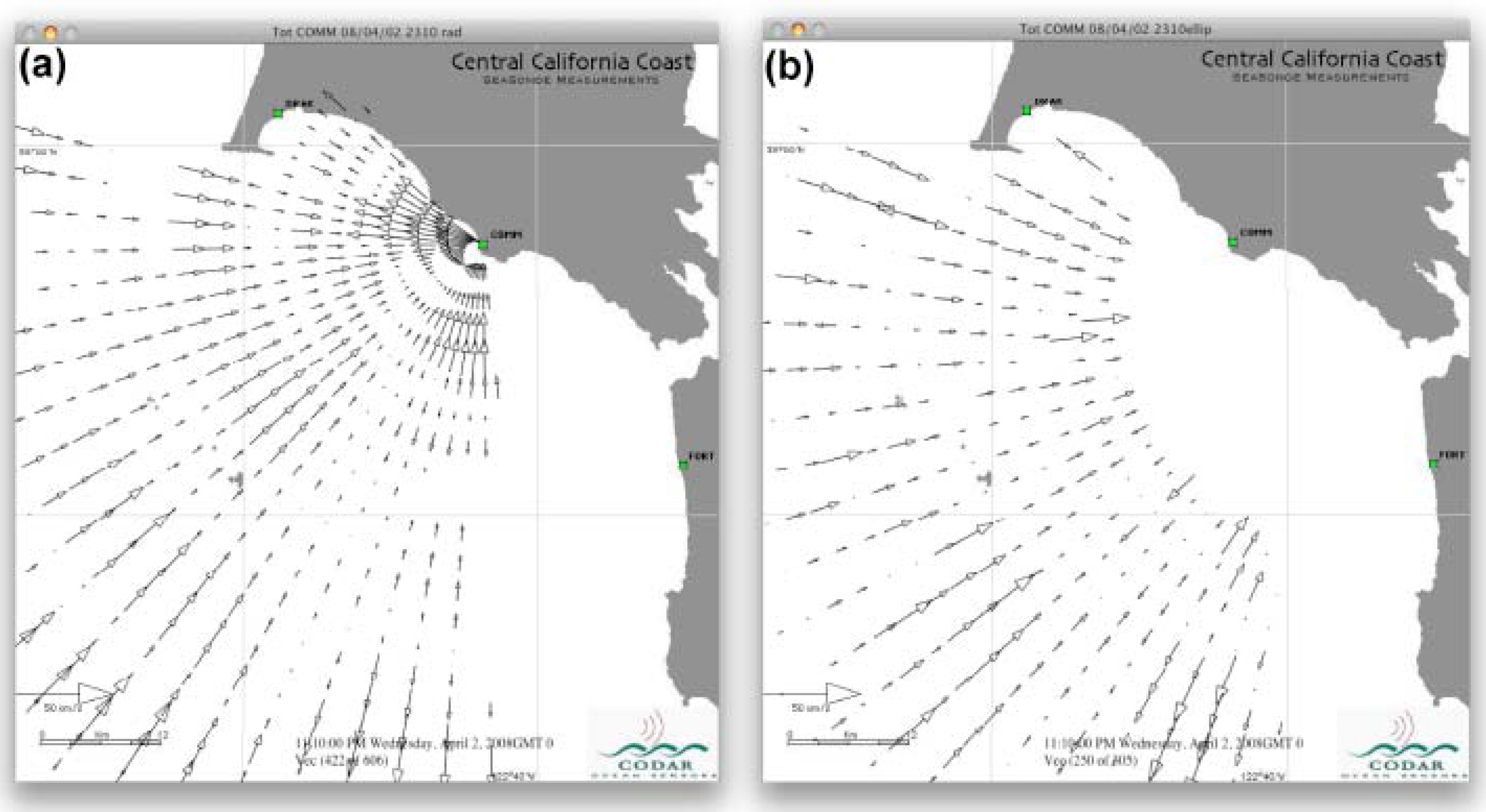
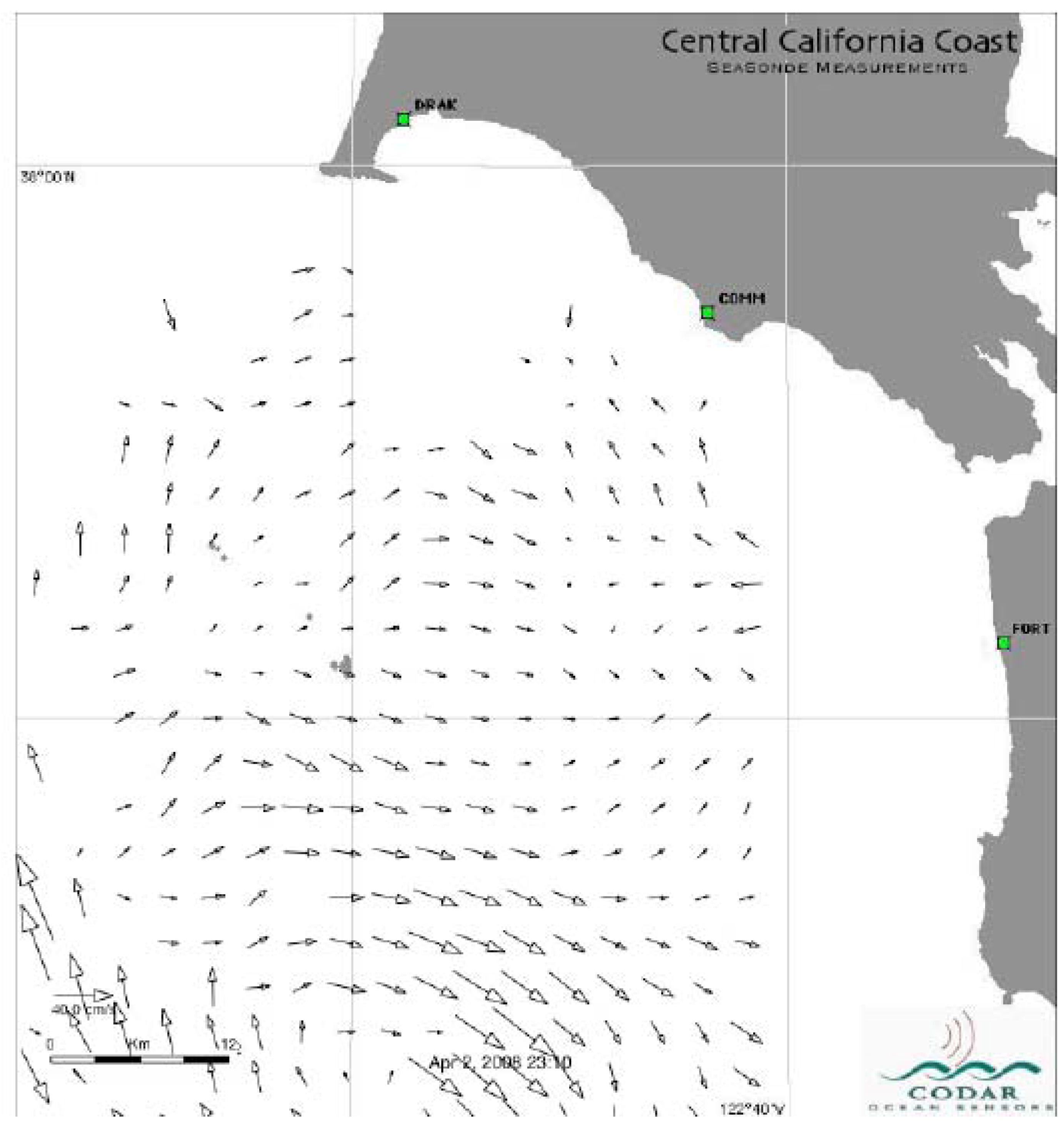
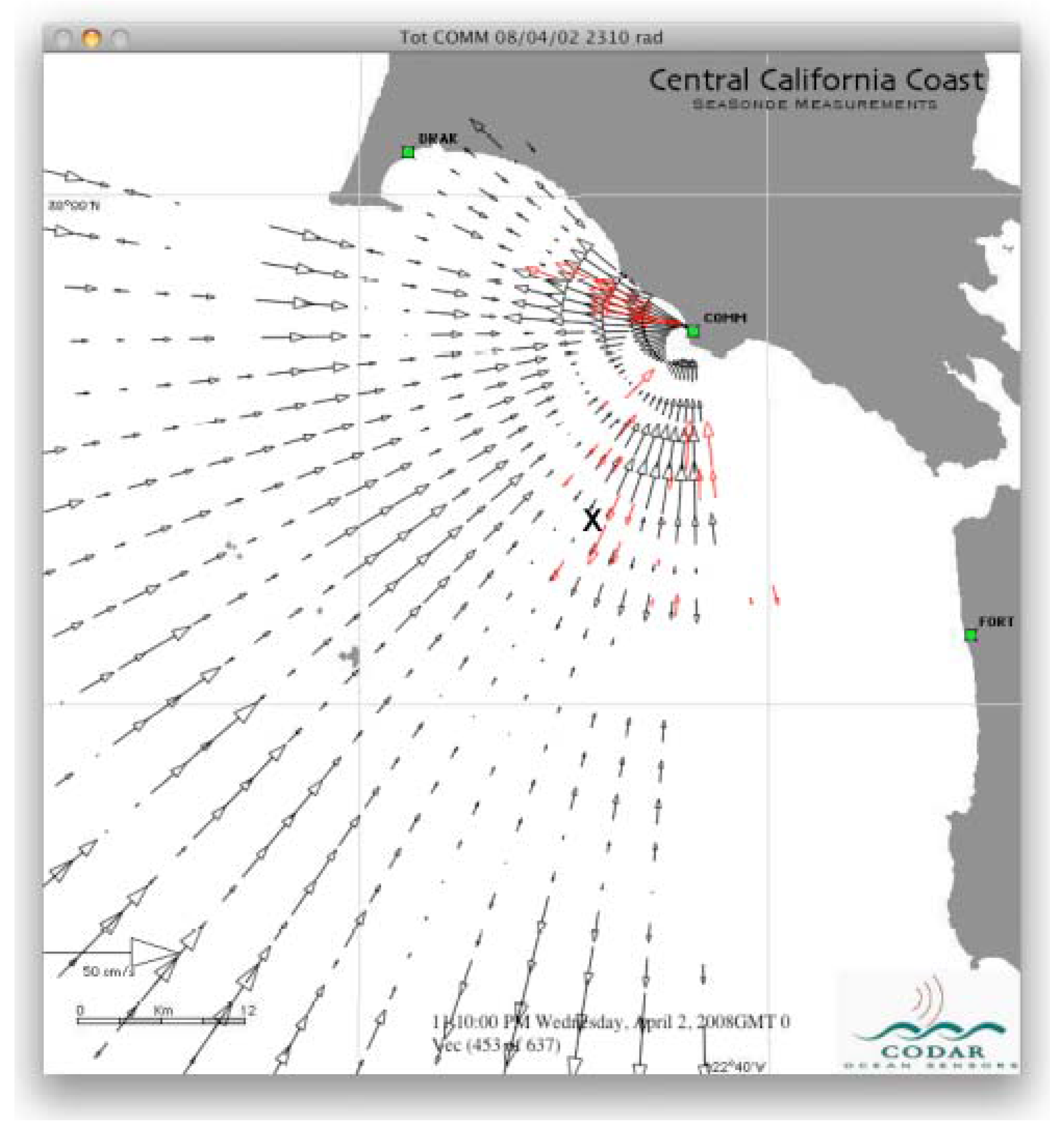
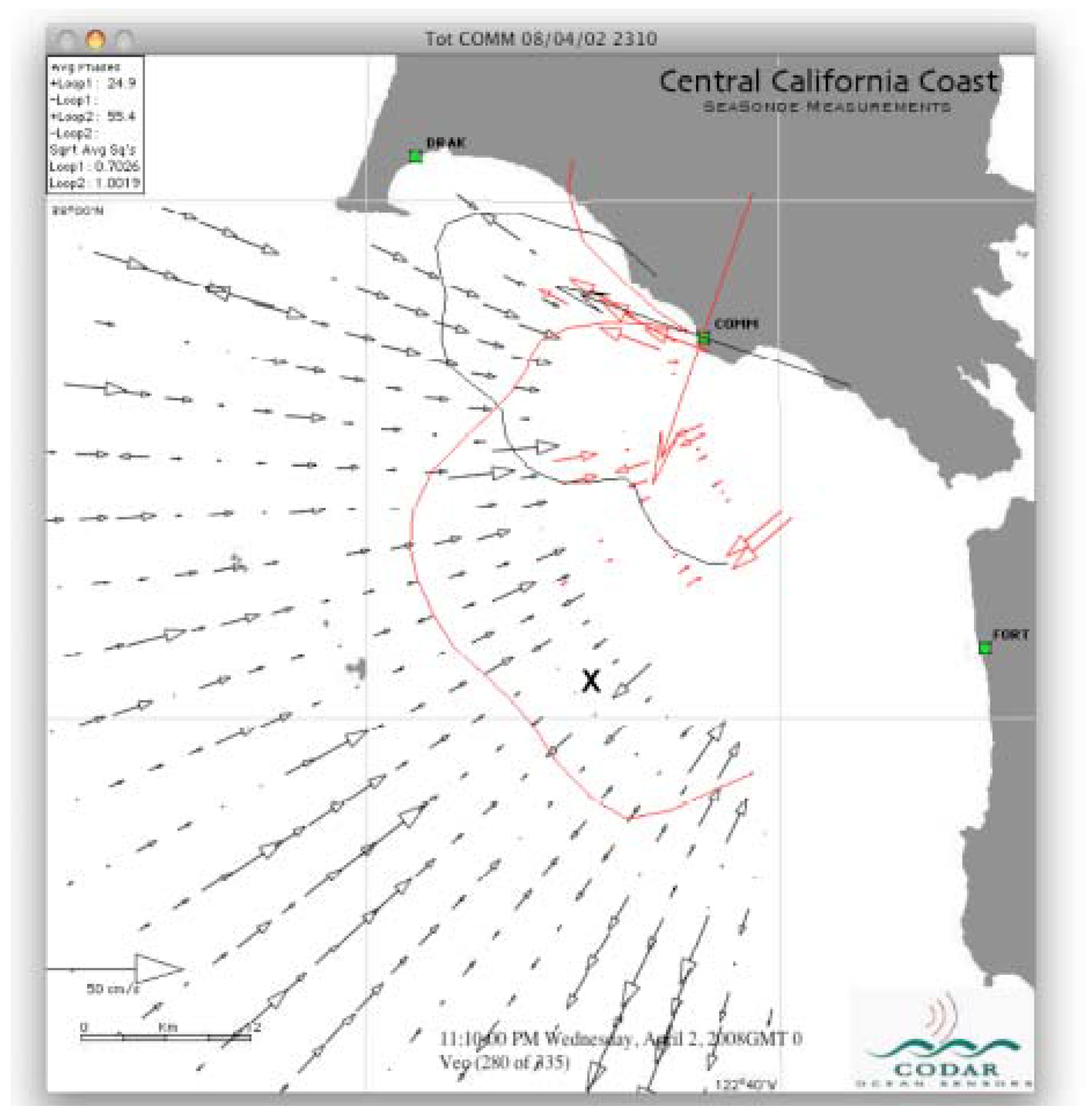
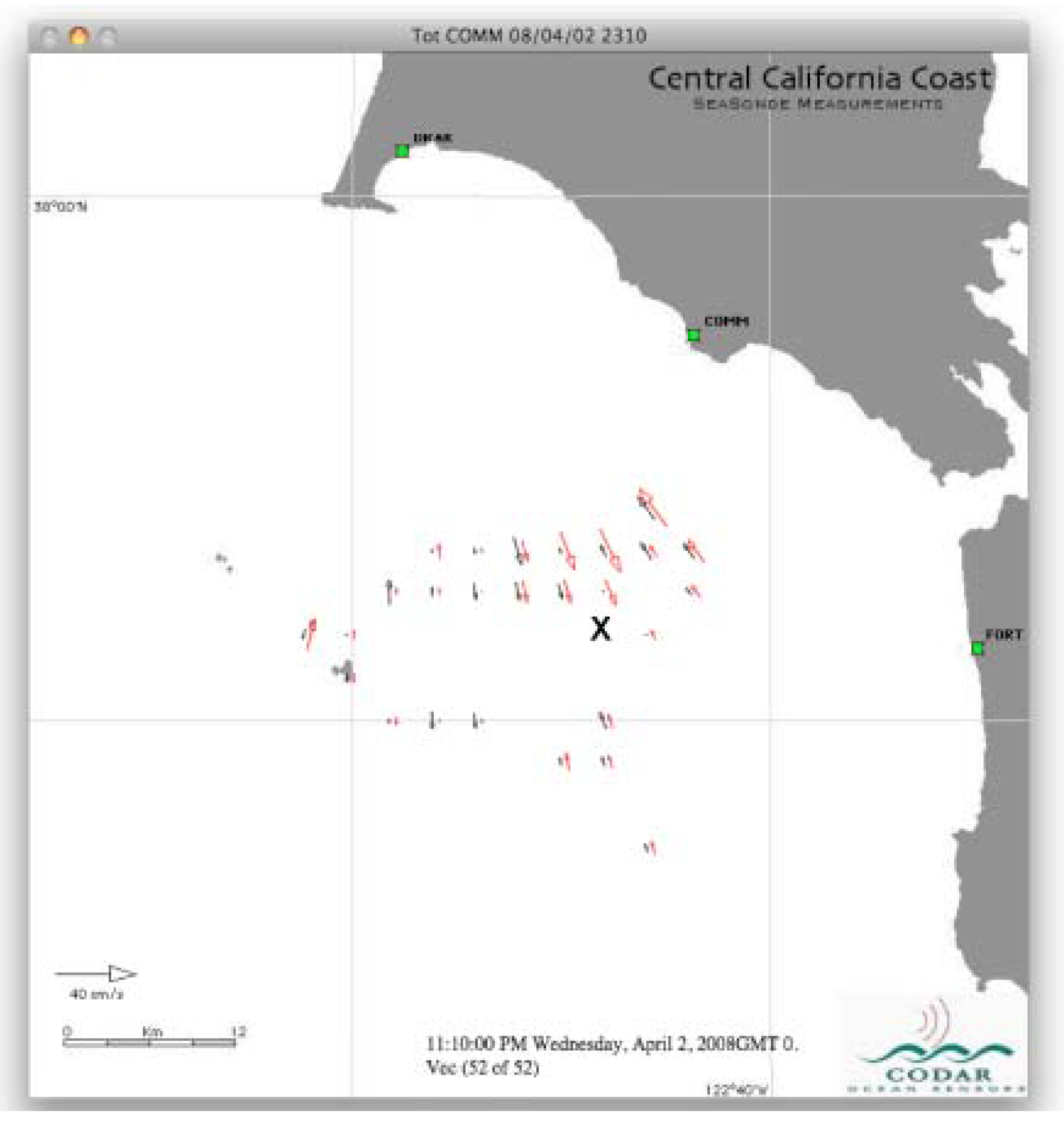
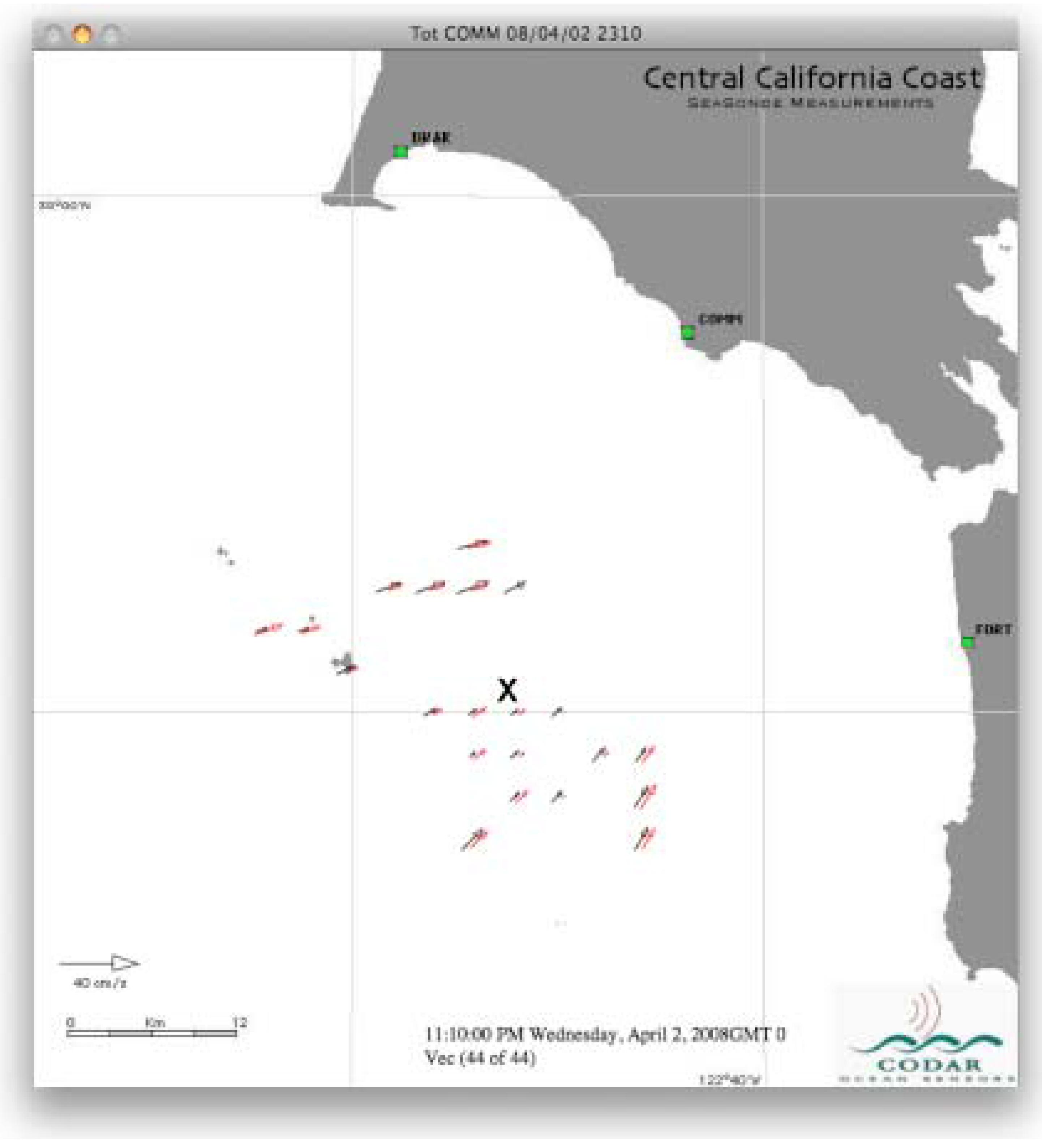
- Movies were made of current velocity maps with the vectors being compared in different colors. We here show single frames; the movies can be downloaded from our web site at http://www.codar.com/.
- (2)
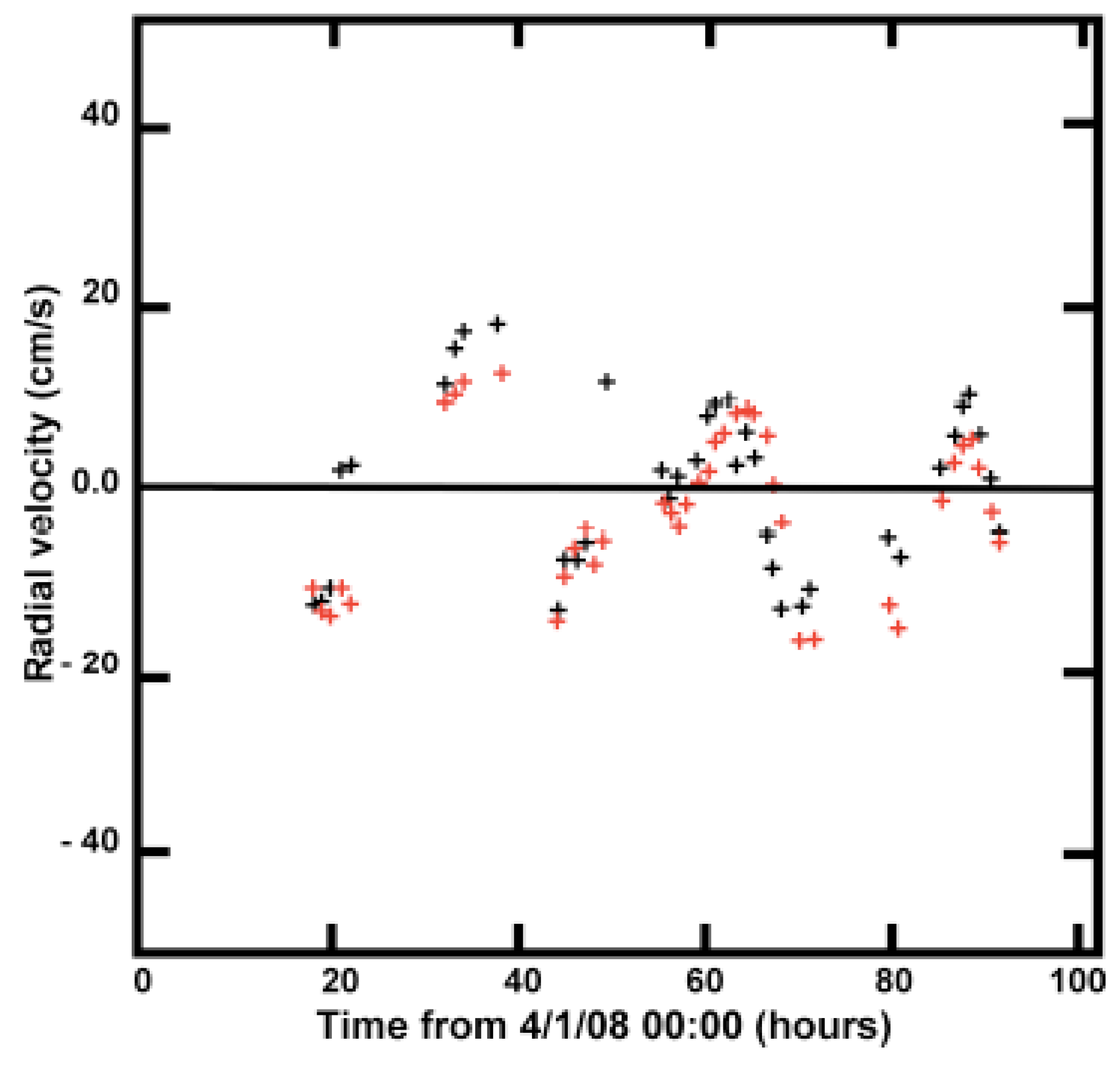
- For illustration purposes only, compared vector components at a single location (marked X in the following maps) are plotted as a function of time. The location is chosen at random to include several drifter readings over time.
- (3)
- Comparison statistics calculated include standard deviations, biases, spatial and temporal uncertainties. These quantities are averaged over the map and plotted as a function of time. These values are further averaged over time and tabulated in Table 1 shown at the end of this section. Scatter plots are presented.
4.3.1. Radial Velocity, Radar vs. Drifter



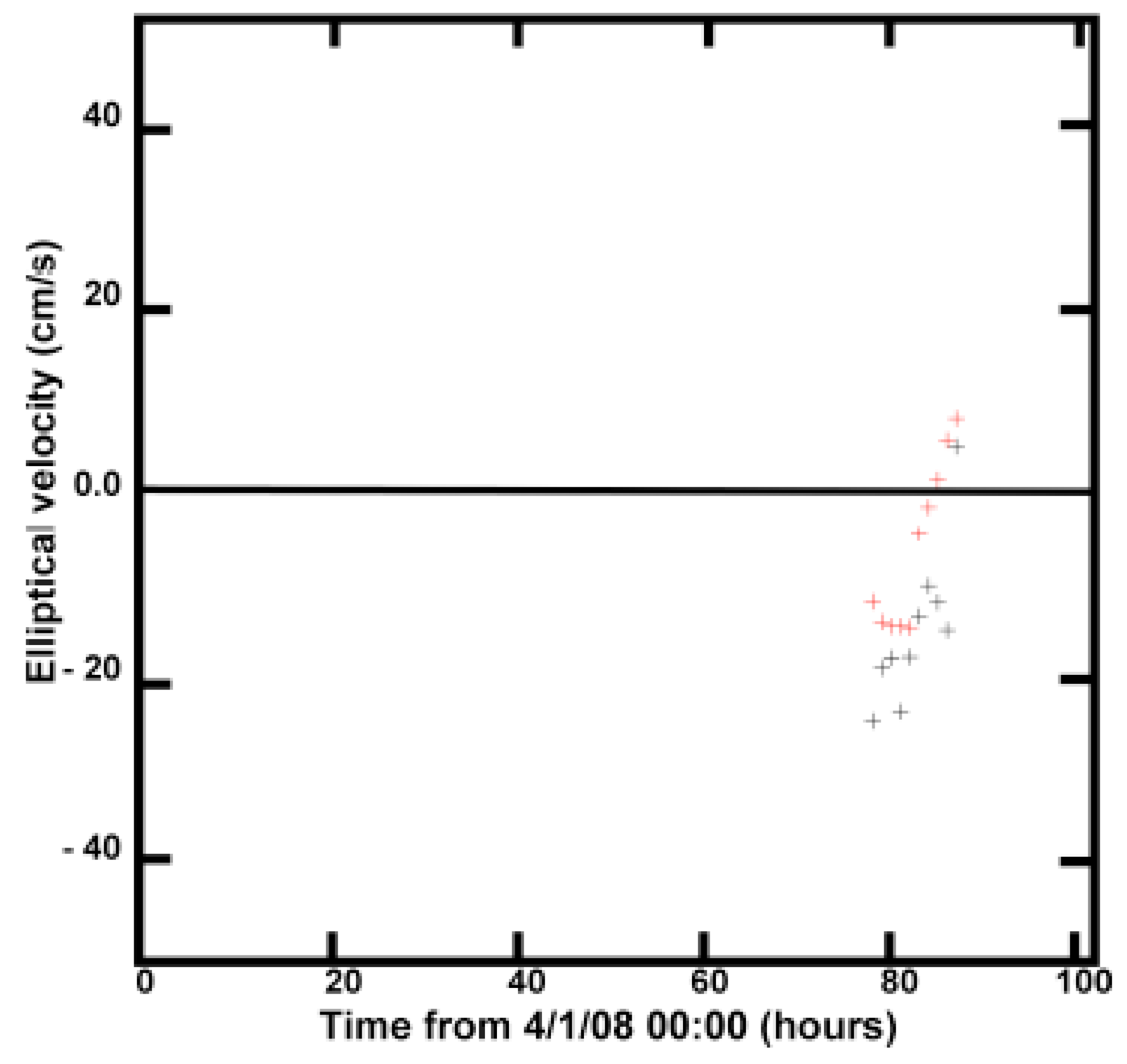
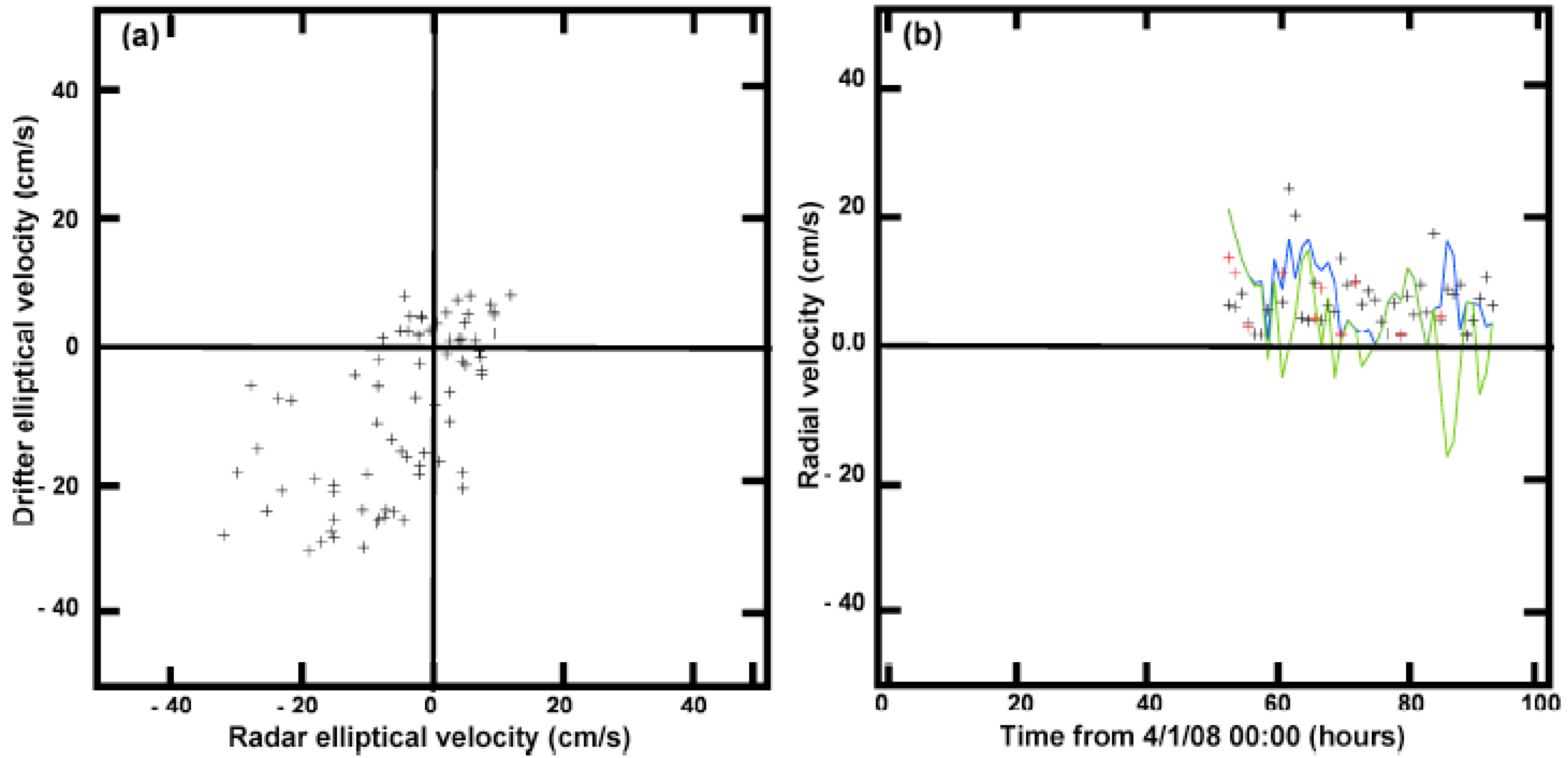
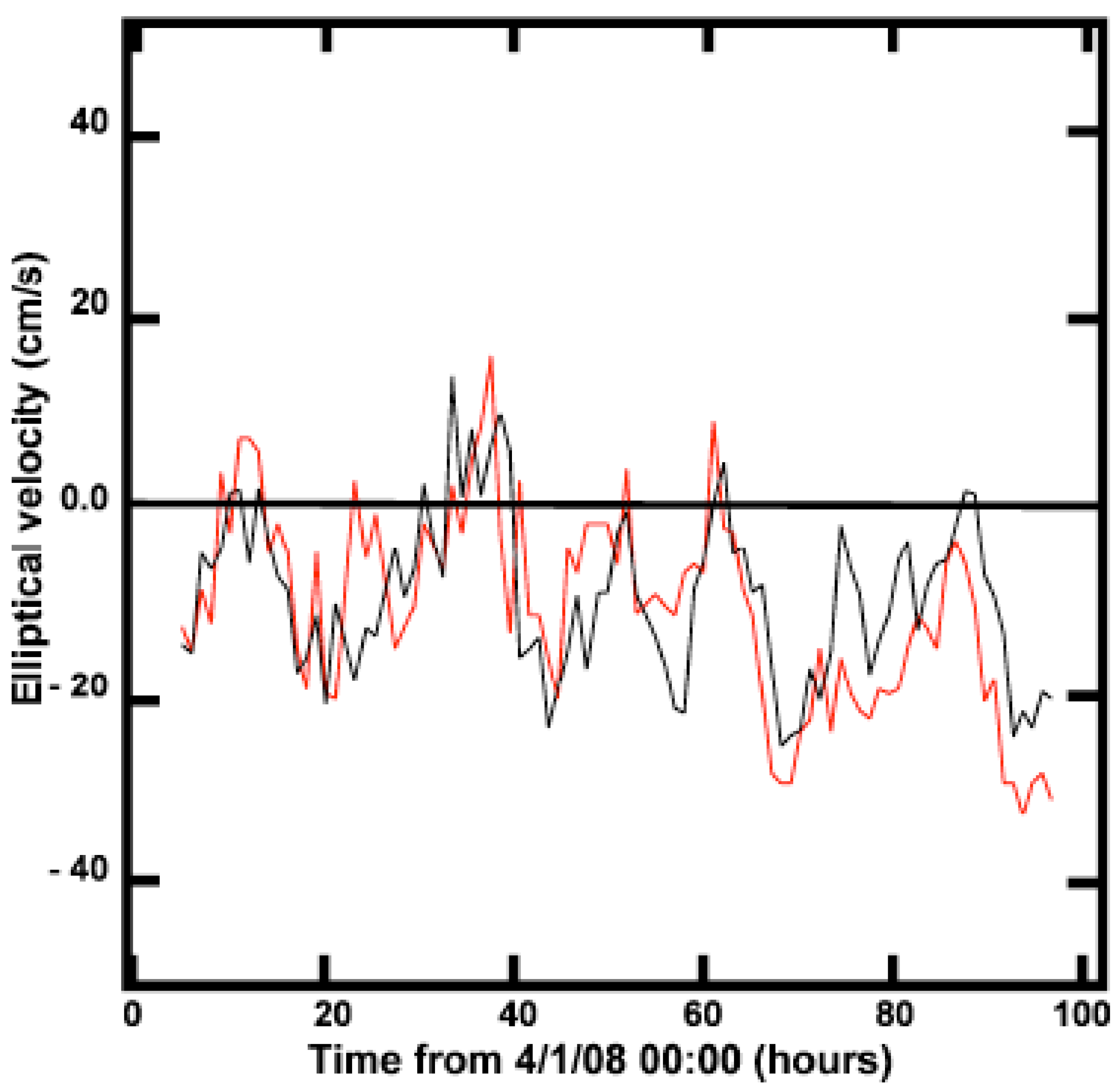
4.3.2. Elliptical Velocity, Radar vs. Drifter






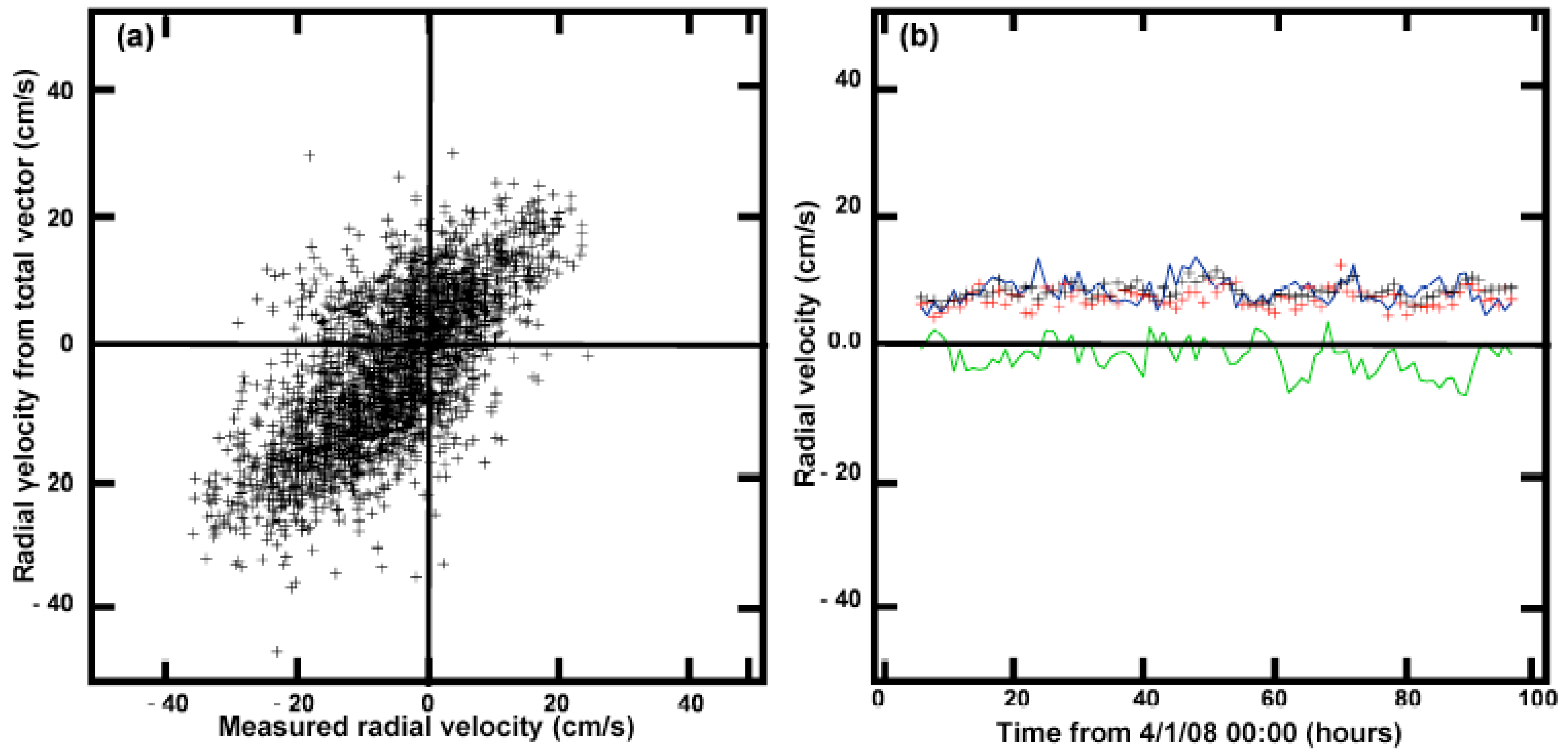
4.3.3. Radar Radial Velocity, Measured vs. Calculated from Total Vectors
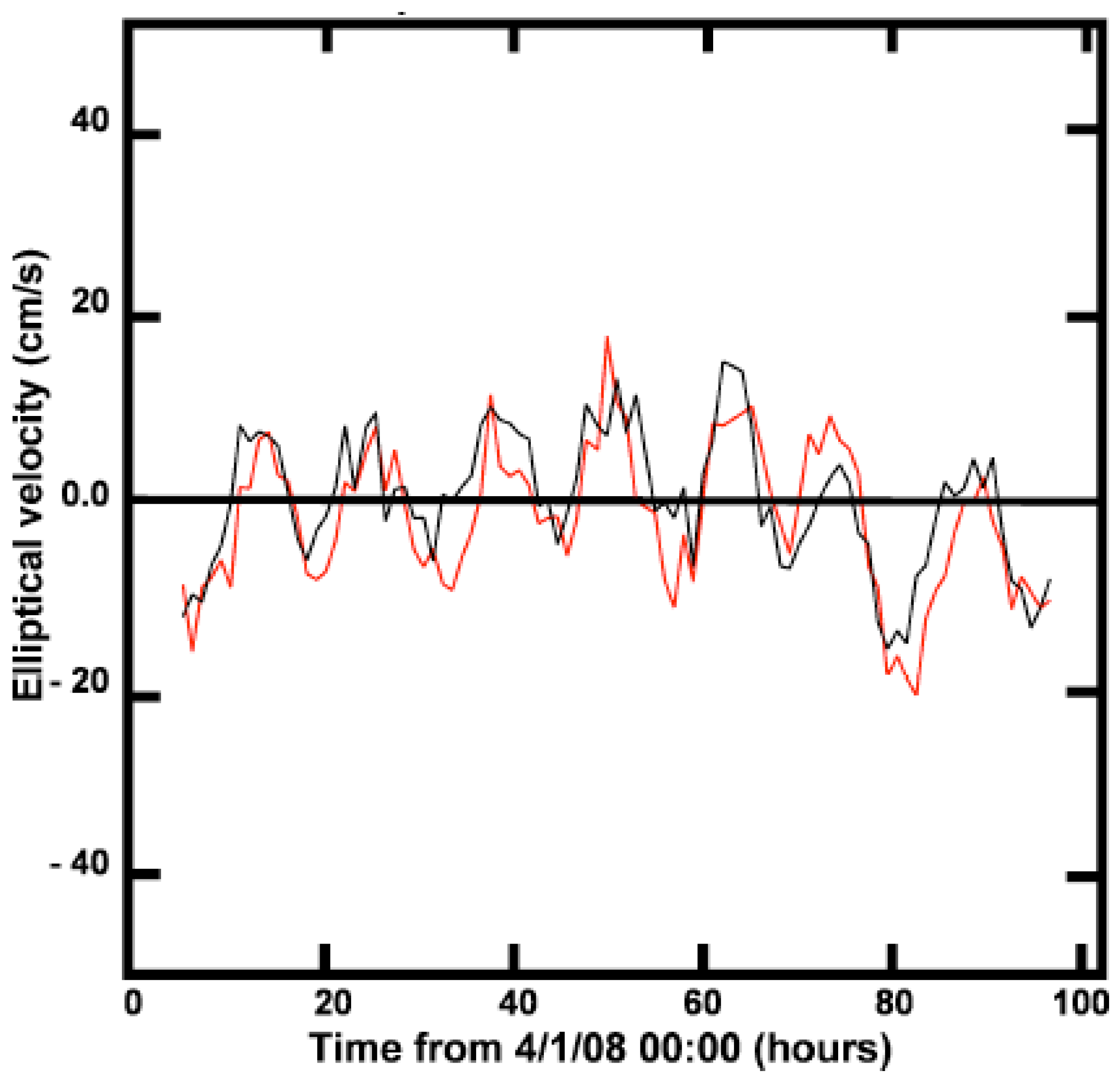
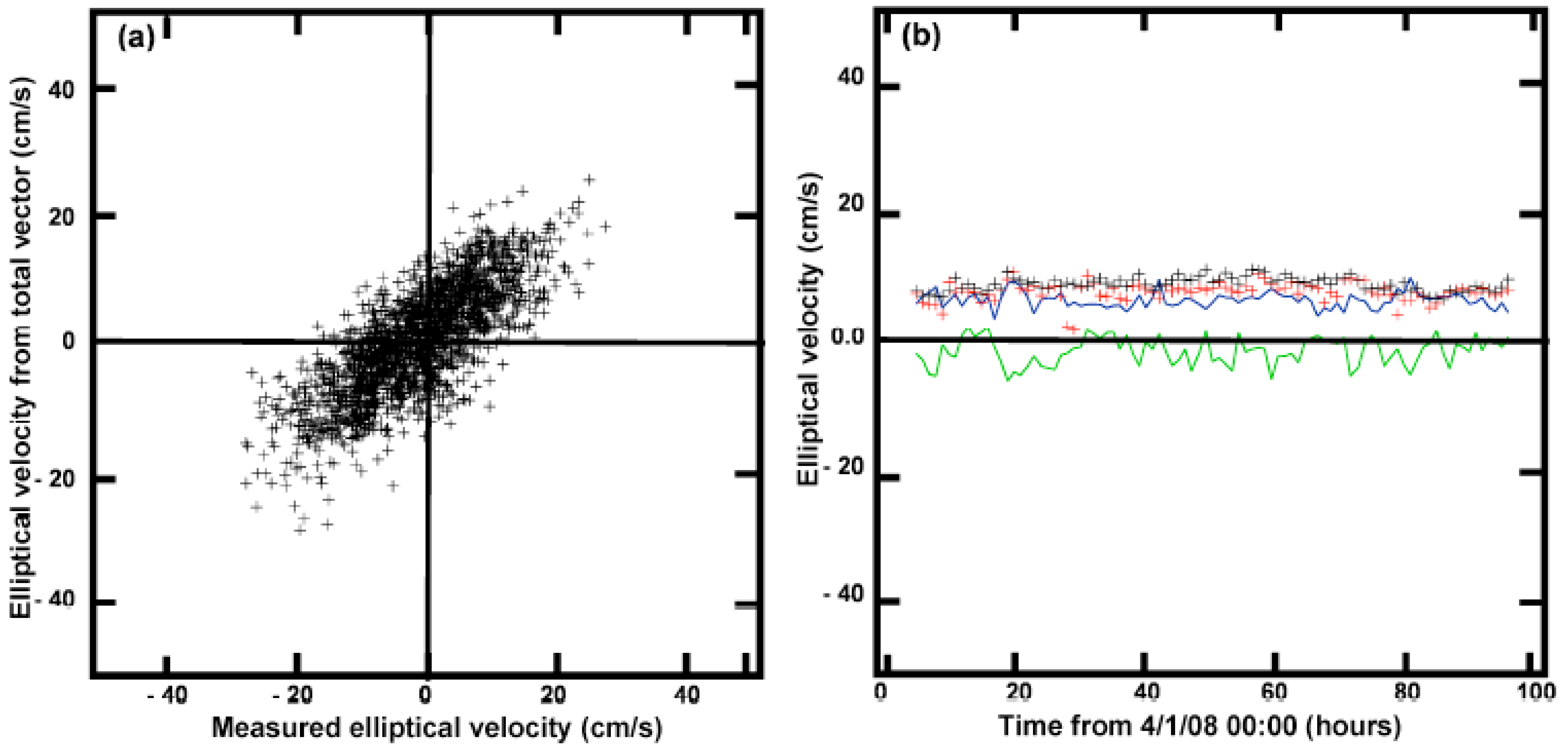
4.3.4. Radar elliptical Velocity, Measured vs. Calculated from Total Vectors




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Drifter vs. radar | Measured vs. calculated | |||
| Radial | Elliptical | Radial | Elliptical | |
| Velocity stats cm/s | ||||
| Standard deviation | 8.5 | 10.9 | 8.5 | 6.1 |
| Bias | 2 | 4.1 | −1.8 | −1.9 |
| Radar uncerts cm/s | ||||
| Spatial | 6 | 7.4 | 7.4 | 7.3 |
| Temporal | 6.4 | 7.1 | 8.5 | 8.5 |
- Drifter vs. Radar:
- Column 1: Comparison between COMM and drifter radials
- Column 2: Comparison between COMM and drifter ellipticals
- Measured vs. calculated:
- Column 1: Comparison between DRAK radials and radials from COMM/FORT totals
- Column 2: Comparison between COMM ellipticals and ellipticals from COMM/FORT totals
- (Totals were calculated from COMM, FORT radials)
5. Conclusions
Acknowledgements
References
- Teague, C.C.; Barrick, D.E.; Lilleboe, P.M. Geometries for streamflow measurement using a UHF RiverSonde. In Proceedings of the 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; pp. 4286–4288.
- Barrick, D.; Teague, C.; Lilleboe, P.; Cheng, R.; Gartner, J. Profiling river surface velocities and volume flow estimation with bistatic UHF RiverSonde radar. In Proceedings of the IEEE/OES Seventh Working Conference on Current Measurement Technology, San Diego, CA, USA, 13–15 March 2003; Rizoli, J.A., Ed.; pp. 55–59.
- Teague, C.C.; Barrick, D.E.; Lilleboe, P.; Cheng, R.T. Canal and river tests of a RiverSonde streamflow measurement system. In IEEE 2001 International Geoscience and Remote Sensing Symposium Proceedings, Sydney, Australia, July 9–13, 2001; pp. 1288–1290.
- Barrick, D.E.; Lilleboe, P.M.; Lipa, B.J.; Isaacson, J. Ocean surface current mapping with bistatic HF radar. U.S. Patent 6,774,837, 2004. [Google Scholar]
- Barrick, D.E.; Lipa, B.J.; Lilleboe, P.M.; Isaacson, J. Gated FMCW DF radar and signal processing for range/Doppler/angle determination. U.S. Patent 5,361,072, 1994. [Google Scholar]
- Barrick, D.E.; Lilleboe, P.M.; Teague, C.C. Multi-station HF FMCW radar frequency sharing with GPS time modulation multiplexing. U.S. Patent 6,856,276, 2001. [Google Scholar]
- Lipa, B.J.; Nyden, B.; Ullman, D.; Terrill, E. SeaSonde radial velocities: derivation and internal Consistency. IEEE J. Oceanic Eng. 2006, 31, 850–861. [Google Scholar] [CrossRef]
- Kohut, J.; Roarty, H.; Licthenwalner, S.; Glenn, S.; Barrick, D.; Lipa, B.; Allen, A. Surface current and wave validation of a nested regional HF radar Network in the Mid-Atlantic Bight, Current Measurement Technology. In Proceedings of the IEEE/OES 9th Working Conference, Charleston, NC, USA, 17–19 March 2008; pp. 203–207.
© 2009 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Lipa, B.; Whelan, C.; Rector, B.; Nyden, B. HF Radar Bistatic Measurement of Surface Current Velocities: Drifter Comparisons and Radar Consistency Checks. Remote Sens. 2009, 1, 1190-1211. https://doi.org/10.3390/rs1041190
Lipa B, Whelan C, Rector B, Nyden B. HF Radar Bistatic Measurement of Surface Current Velocities: Drifter Comparisons and Radar Consistency Checks. Remote Sensing. 2009; 1(4):1190-1211. https://doi.org/10.3390/rs1041190
Chicago/Turabian StyleLipa, Belinda, Chad Whelan, Bill Rector, and Bruce Nyden. 2009. "HF Radar Bistatic Measurement of Surface Current Velocities: Drifter Comparisons and Radar Consistency Checks" Remote Sensing 1, no. 4: 1190-1211. https://doi.org/10.3390/rs1041190