Derivation of Soil Line Influence on Two-Band Vegetation Indices and Vegetation Isolines

 ,
, {kind=link}
Abstract
:1. Introduction
2. Soil Line and Vegetation Isoline Equations
2.1. Soil Line Equation
2.2. Model Assumptions
2.3. Vegetation Isoline Equations
3. Soil Line Influence on Vegetation Isoline
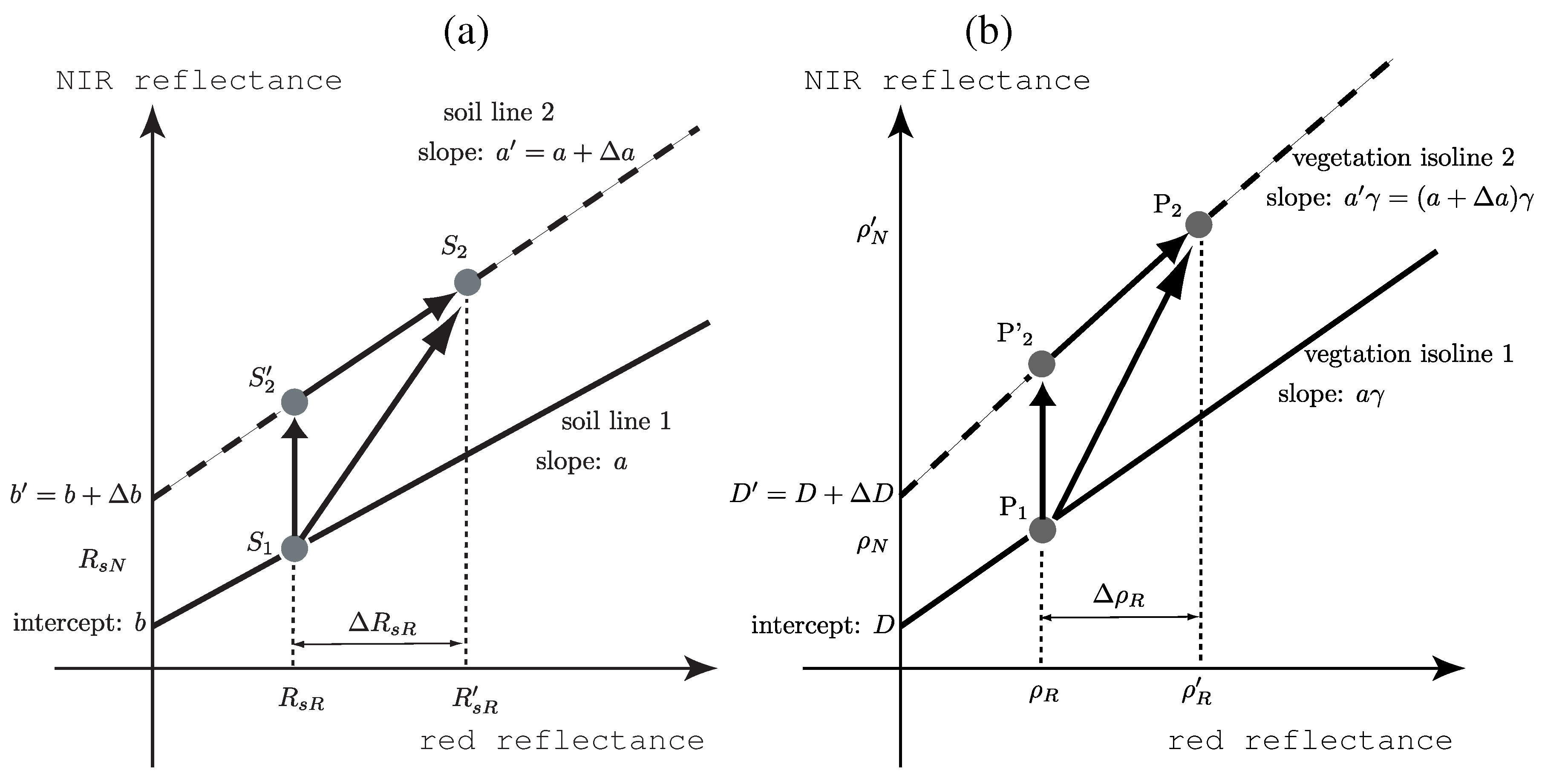
3.1. Representation of Soil Line Variation
3.2. Derivation of Soil Line Influce on Vegetation Isoline
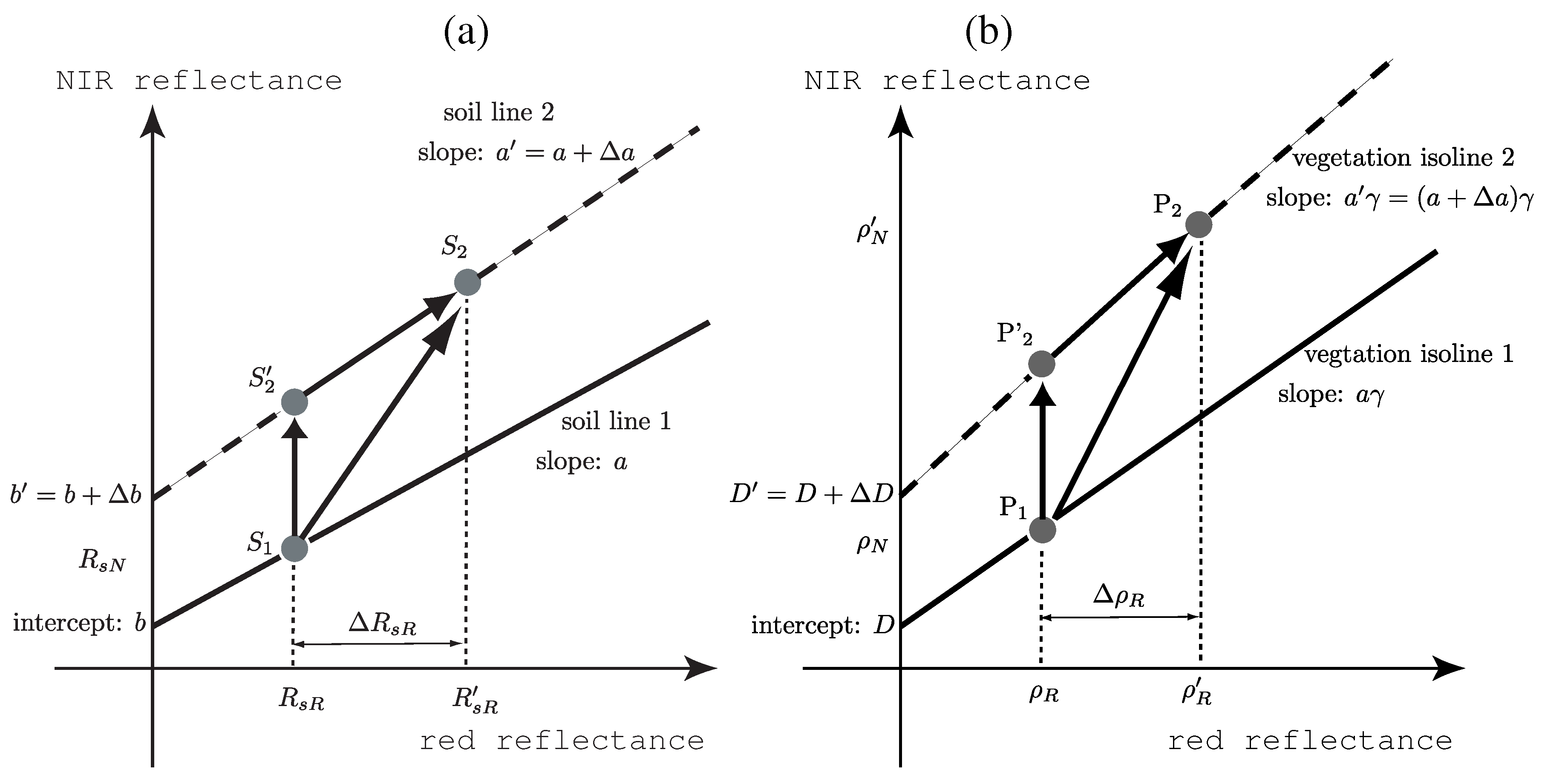
3.3. Variations of Red and NIR Reflectances by Soil Line Variation
4. Soil Line Influence on VI
4.1. Variations of VI Value by Soil Line Variation
4.2. as a function of , and
5. Discussion
5.1. Condition for Invariance of Vegetation Isoline Parameters
5.2. Iso-plane of
6. Concluding Remarks
Acknowledgements
A Derivation of Vegetation Isoline Equation
References
- Brown, J.; Wardow, B.; Tabesse, T.; Hayes, M.; Reed, B.T. The Vegetation Drought Response Index (VegDRI): A New Integrated Approach for Monitoring Drought Stress in Vegetation. GIScience and Remote Sens. 2008, 45, 16–46. [Google Scholar] [CrossRef]
- Li, A.N.; Liang, S.L.; Wang, A.S.; Qin, J. Estimating crop yield from multi-temporal satellite data using multivariate regression and neural network techniques. Photogrammetric Engineering and Remote Sens. 2007, 73, 1149–1157. [Google Scholar] [CrossRef]
- National Research Council. Issues in the integration of research and operational satellite systems for climate research: I. science and design; National Academy Press: Washington D.C., 2000. [Google Scholar]
- National Research Council. Issues in the integration of research and operational satellite systems for climate research: II. implementation; National Academy Press: Washington D.C., 2000. [Google Scholar]
- Gilabert, M.A.; Gonzaĺez-Piqueras, J.; Garciá, F.J.; Meliá, J. A generalized soil-adjusted vegetation index. Remote Sens. Environ. 2002, 82, 303–310. [Google Scholar] [CrossRef]
- Major, D.J.; Baret, F.; Guyot, G. A ratio vegetation index adjusted for soil brightness. Int. J. Remote Sens. 1990, 11(5), 727–40. [Google Scholar] [CrossRef]
- Huete, A.R.; Jackson, R.D.; Post, D.F. Spectral response of a plant canopy with different soil backgrounds. Remote Sens. Environ. 1985, 17, 37–54. [Google Scholar] [CrossRef]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Pinty, B.; Verstraete, M.M. GEMI: a non-linear index to monitor global vegetation from satellites. Vegetatio 1992, 101, 15–20. [Google Scholar] [CrossRef]
- Qi, J.; Chehbouni, A.; Huete, A.R.; Kerr, Y.H.; Sorooshian, S. A modified soil adjusted vegetation index. Remote Sens. Environ. 1994, 48, 119–126. [Google Scholar] [CrossRef]
- Richardson, A.J.; Wiegand, C.L. Distinguishing vegetation from soil background information. Photogramm. Eng. Remote Sens. 1977, 43, 1541–1552. [Google Scholar]
- Galvao, L.S.; Vitorello, I. Variability of laboratory measured soil lines of soils from southeastern Brazil. Remote Sens. Environ. 1998, 63, 166–181. [Google Scholar] [CrossRef]
- Huete, A.R.; Jackson, R.D.; Post, D.F. Soil spectral effects on 4-space vegetation discrimination. Remote Sens. Environ. 1984, 15, 155–165. [Google Scholar] [CrossRef]
- Huete, A.R. Separation of soil plant spectral mixtures by factor analysis. Remote Sens. Environ. 1986, 61, 24–33. [Google Scholar] [CrossRef]
- Huete, A.R. Soil influences in remotely sensed vegetation-canopy spectra. In Theory and Applications of Optical Remote Sensing; Asrar, G., Ed.; Wiley: New York, 1989; pp. 107–141. [Google Scholar]
- Huete, A.R.; Tucker, C.J. Investigation of soil influences in AVHRR red and near-infrared vegetation index imagery. Int. J. Remote Sens. 1991, 12, 1223–1242. [Google Scholar] [CrossRef]
- Donohue, R.J.; Roderick, M.L.; McVicar, R.R. Deriving consistent long-term vegetation information from AVHRR reflectance data using a cover-triangle-based framework. Remote Sens. Environ. 2008, 112, 2938–2949. [Google Scholar] [CrossRef]
- Stabile, M.C.C.; Searcy, S.W. Validation of the soil line transformation technique. Trans. ASABE 2009, 52, 633–640. [Google Scholar] [CrossRef]
- Fox, G.A.; Sabbagh, G.J.; Searcy, S.W.; Yang, C. An automated soil line identification routine for remotely sensed images. Soil Sci. Soc. Am. J. 2004, 68, 1326–1331. [Google Scholar] [CrossRef]
- Baret, F.; Jackquemoud, S.; Hanocq, J.F. About the soil line concept in remote sensing. Remote Sens. Rev. 1993, 5, 281–284. [Google Scholar] [CrossRef]
- Fox, G.A.; Sabbagh, G.J. Estimation of soil organic matter from Red and Near-Infrared remotely sensed data using a soil line euclidean distance technique. Soil Sci. Soc. Am. J. 2002, 66, 1922–1929. [Google Scholar] [CrossRef]
- Fox, G.A.; Metla, R. Soil property analysis using principal components analysis, soil line, and regression models. Soil Sci. Soc. Am. J. 2005, 69, 1782–1788. [Google Scholar] [CrossRef]
- Nanni, M.R.; Demattê, J.A.M. Spectral reflectance methodology in comparison to traditional soil analysis. Soil Sci. Soc. Am. J. 2006, 70, 393–407. [Google Scholar] [CrossRef]
- Jordan, C.F. Derivation of leaf area index from quality of light on the forest floor. Ecology 1969, 50, 663–666. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Clevers, J.G.P.W. The application of a weighted infrared-red vegetation index for estimating leaf area index by correcting for soil moisture. Remote Sens. Environ. 1989, 29, 25–37. [Google Scholar] [CrossRef]
- Demattê, J.A.M.; Huete, A.R.; Guimaraes, L.; Nanni, M.R.; Alves, M.C.; Fiorio, P.R. Methodology for bare soil detection and discrimination by Landsat-TM image. Open Remote Sens. J. 2009, 2, 24–35. [Google Scholar] [CrossRef]
- Elvidge, C.D.; Lyon, R.J.P. Influence of rock-soil spectral variation on the assessment of green biomass. Remote Sens. Environ. 1985, 17, 265–269. [Google Scholar] [CrossRef]
- Yoshioka, H.; Huete, A.R.; Miura, T. Derivation of vegetation isoline equations in red-NIR reflectance space. IEEE Trans. Geosci. Remote. Sens. 2000, 38, 838–848. [Google Scholar] [CrossRef]
- Yoshioka, H.; Miura, T.; Huete, A.R.; Ganapol, B.D. Analyses of vegetation isoline equations in red-NIR reflectance space. Remote Sens. Environ. 2000, 74, 313–326. [Google Scholar] [CrossRef]
- Ben-Dor, E.; Irons, J.R.; Epema, G.F. Remote sensing for the earth science. In Manual of remote sensing vol.3; Rencz, A.N., Ed.; Wiley: New York, 1999; pp. 111–188. [Google Scholar]
- Valeriano, M.M.; Epiphanio, J.C.N.; Formaggio, A.R.; Oliveira, J.B. Bidirectional reflectance factor of 14 soil classes from Brazil. Int. Journal of Remote Sens. 1995, 16, 113–128. [Google Scholar] [CrossRef]
- Elvidge, C.D.; Chen, Z. Comparison of broad-band and narrow-band red and near-infrared vegetation indices. Remote Sens. Environ. 1995, 51, 38–48. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J. MODIS NDVI optimization to fit the AVHRR data series-spectral considerations. Remote Sens. Environ. 1998, 66, 343–350. [Google Scholar] [CrossRef]
- Gobron, N.; Pinty, B.; Verstraete, M.M.; Widlowski, J. Advanced vegetation indices optimized for up-coming sensors: design, performance, and applications. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2489–2505. [Google Scholar]
- Clevers, J.G.P.W. The derivation of a simplified reflectance model for the estimation of leaf area index. Remote Sens. Environ. 1988, 25, 53–69. [Google Scholar] [CrossRef]
- Verhoef, W. Light scattering by leaf layers with application to canopy reflectance modeling: the SAIL model. Remote Sens. Environ. 1984, 16, 125–141. [Google Scholar] [CrossRef]
- Verhoef, W. Earth observation modeling based on layer scattering matrices. Remote Sens. Environ. 1984, 17, 165–78. [Google Scholar] [CrossRef]
- Cooper, K.; Smith, J.A.; Pitts, D. Reflectance of a vegetation canopy using the adding method. Applied Optics 1982, 21(22), 4112–4119. [Google Scholar] [CrossRef] [PubMed]
- Van de Hulst, H.C. Multiple light scattering: tables, formulas, and applications, 1; Academic Press: New York, 1980. [Google Scholar]
- Baret, F.; Guyot, G. Potentials and limits of vegetation indices for LAI and APAR assessment. Remote Sens. Environ. 1991, 35, 161–173. [Google Scholar] [CrossRef]
- Verstraete, M.M.; Pinty, B. Designing optimal spectral indices for remote sensing applications. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1254–1265. [Google Scholar] [CrossRef]
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license http://creativecommons.org/licenses/by/3.0/.
Share and Cite
Yoshioka, H.; Miura, T.; Demattê, J.A.M.; Batchily, K.; Huete, A.R. Derivation of Soil Line Influence on Two-Band Vegetation Indices and Vegetation Isolines. Remote Sens. 2009, 1, 842-857. https://doi.org/10.3390/rs1040842
Yoshioka H, Miura T, Demattê JAM, Batchily K, Huete AR. Derivation of Soil Line Influence on Two-Band Vegetation Indices and Vegetation Isolines. Remote Sensing. 2009; 1(4):842-857. https://doi.org/10.3390/rs1040842
Chicago/Turabian StyleYoshioka, Hiroki, Tomoaki Miura, José A. M. Demattê, Karim Batchily, and Alfredo R. Huete. 2009. "Derivation of Soil Line Influence on Two-Band Vegetation Indices and Vegetation Isolines" Remote Sensing 1, no. 4: 842-857. https://doi.org/10.3390/rs1040842