Impact of Error in Lidar-Derived Canopy Height and Canopy Base Height on Modeled Wildfire Behavior in the Sierra Nevada, California, USA

 ,
, 
Abstract
:
1. Introduction
1.1. Spatial Inputs to Fire Behavior Models
1.2. Lidar to Measure Forest Structure
1.3. Error Influence on Model Results
2. Materials and Methods
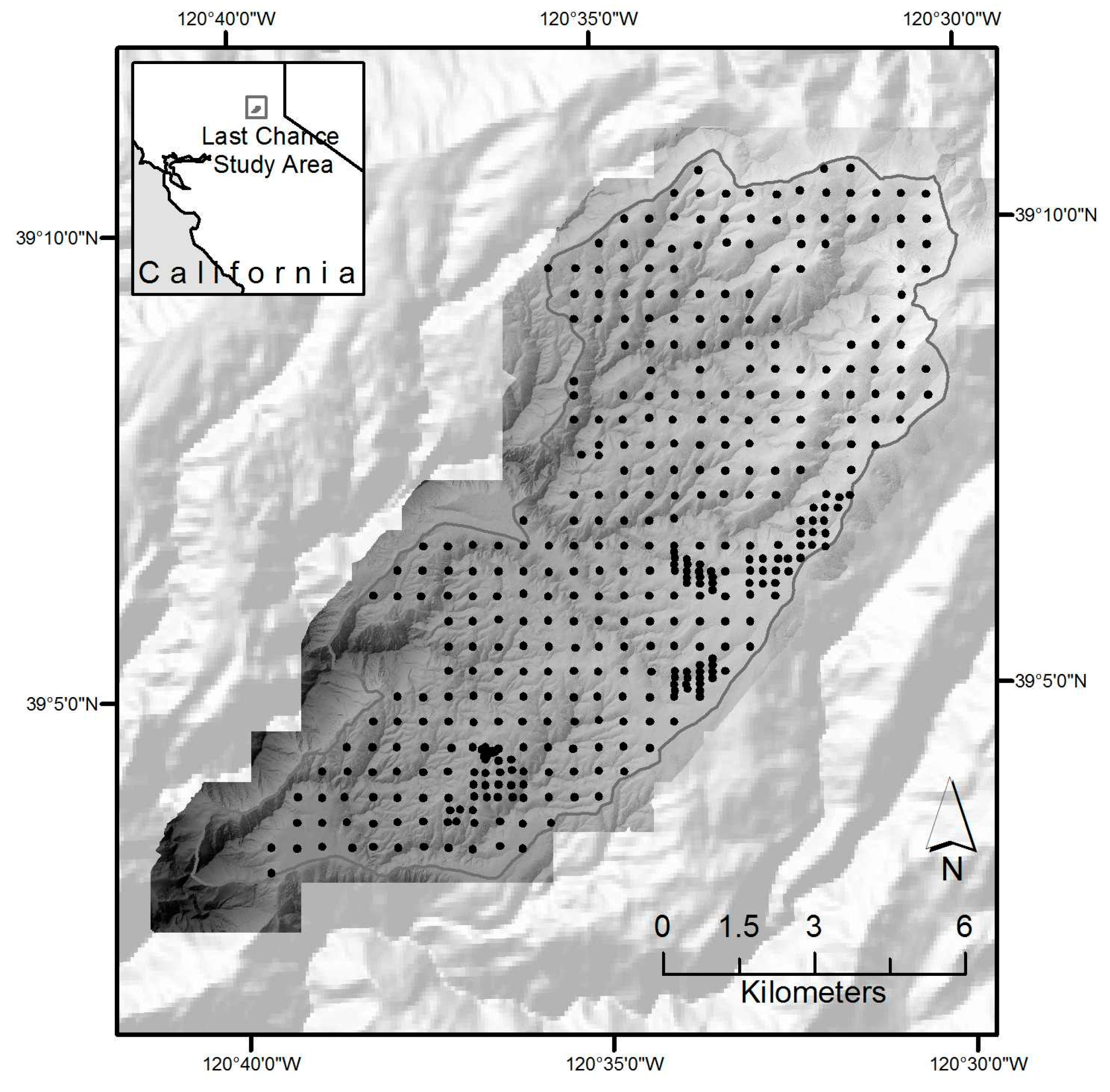
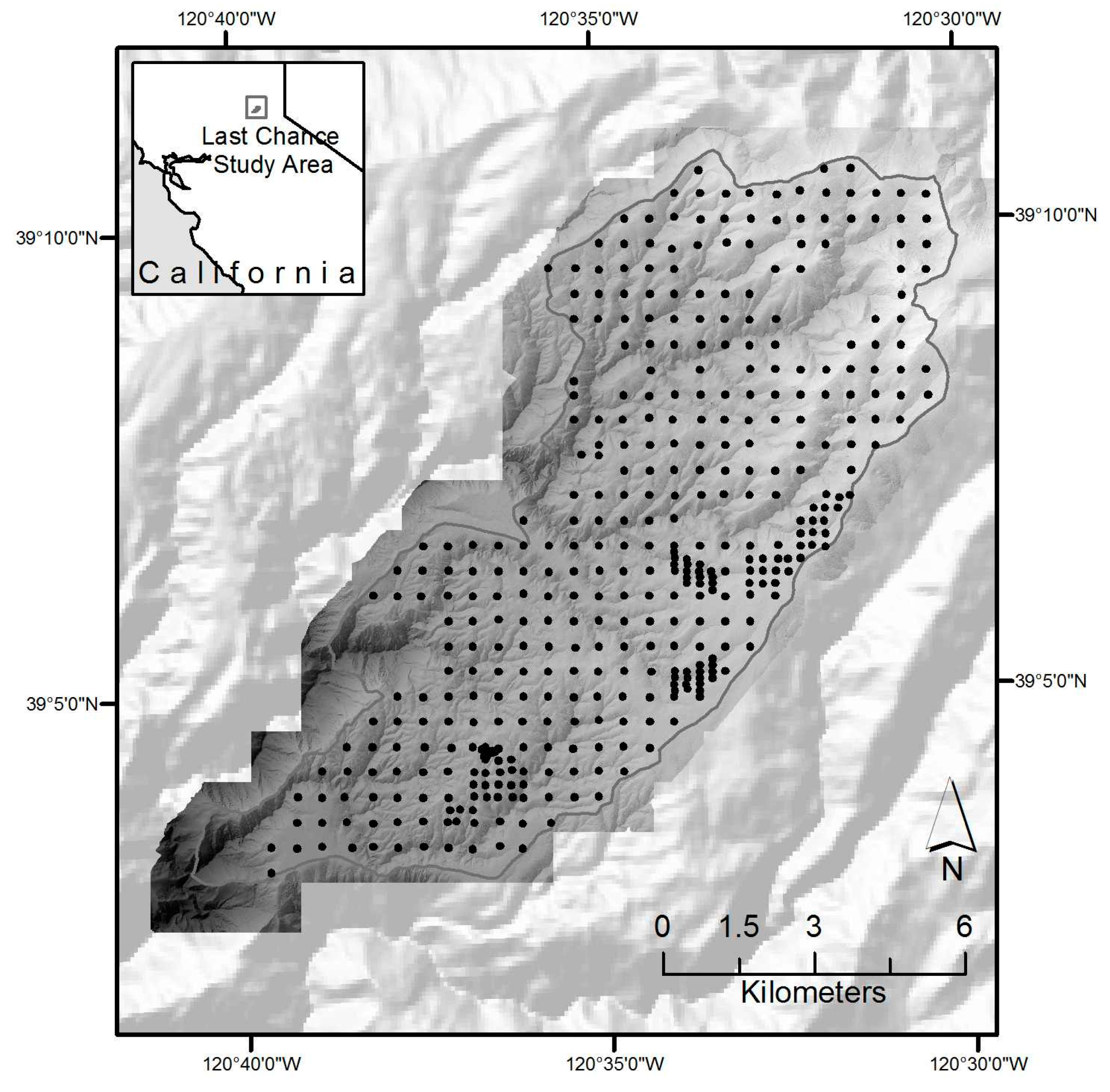
2.1. Study Area
2.2. Data Acquisition
2.2.1. Field Sampling
2.2.2. Lidar Data
2.3. Fire Behavior Model Inputs
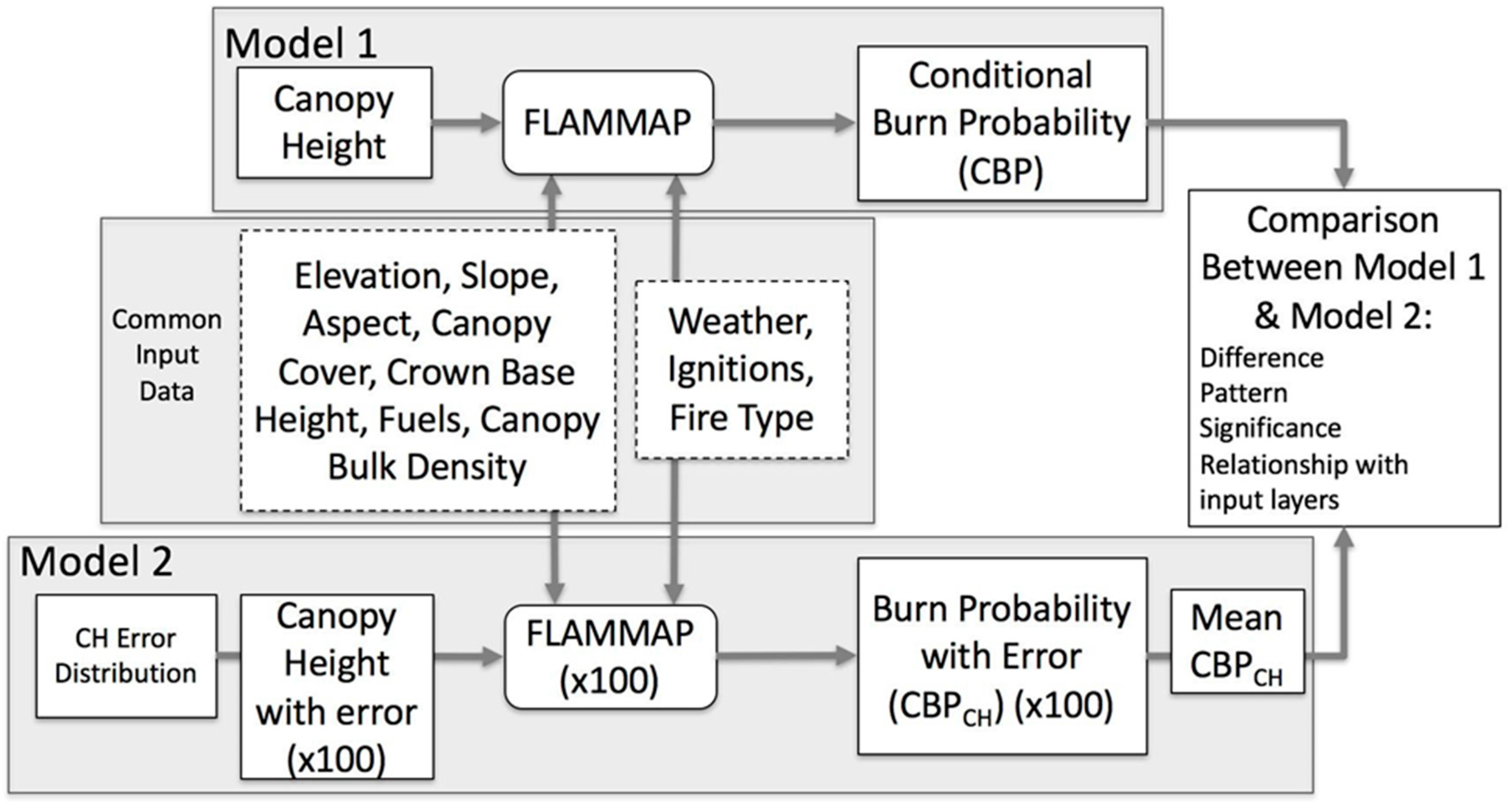
2.4. Fire Behavior Model Simulations
2.4.1. Monte Carlo Simulations
2.4.2. Evaluation of Error Impact on Model Result
3. Results
3.1. Canopy Height and Canopy Base Height
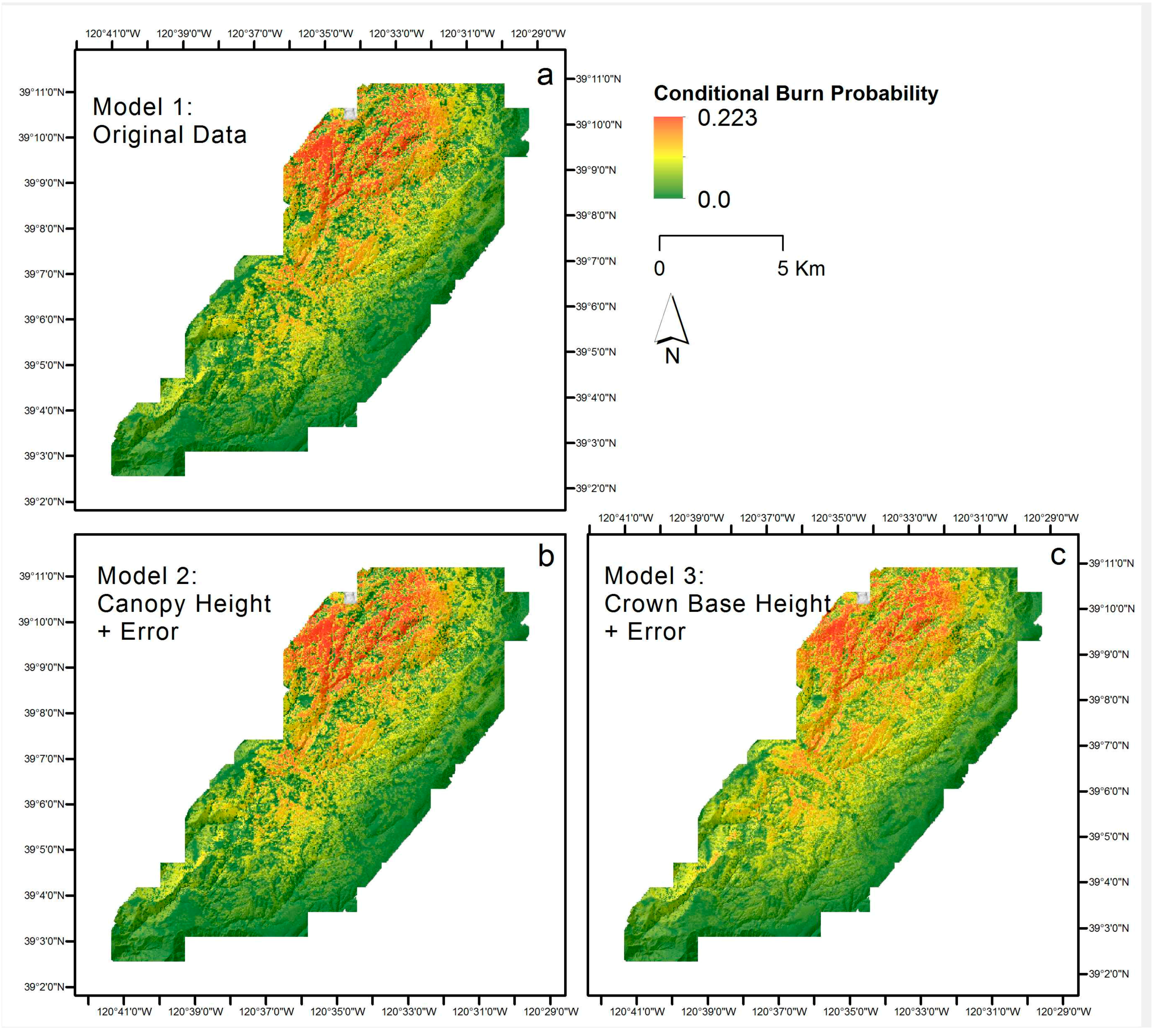
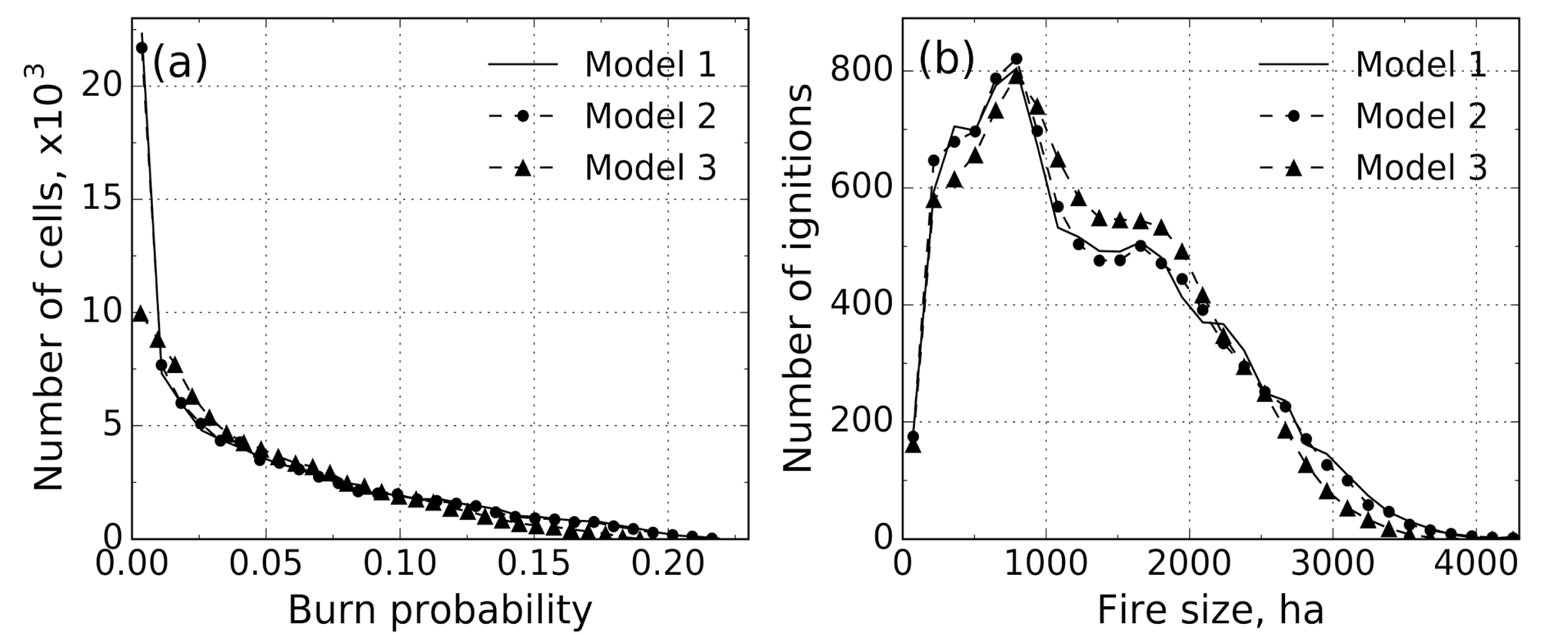
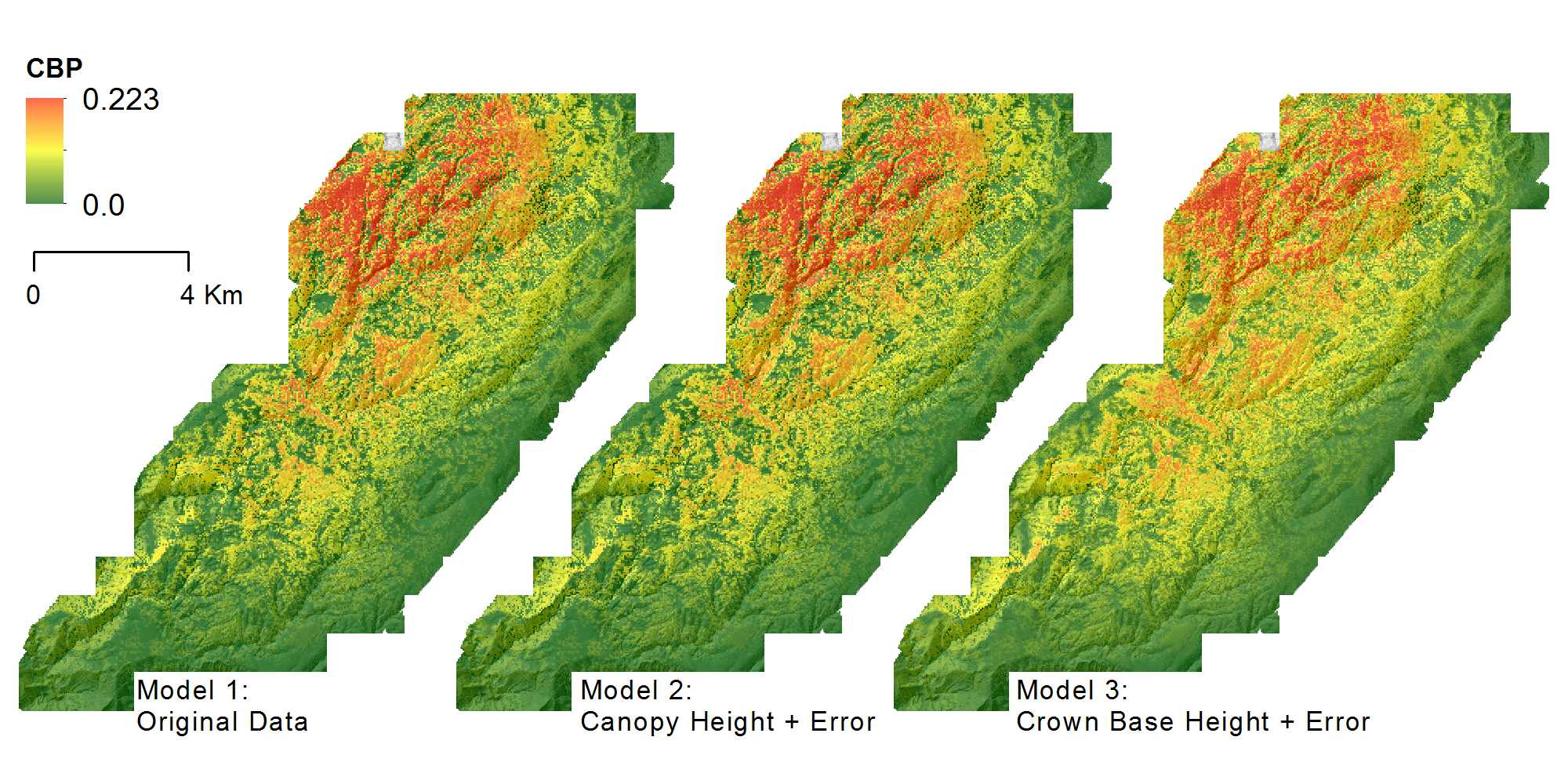
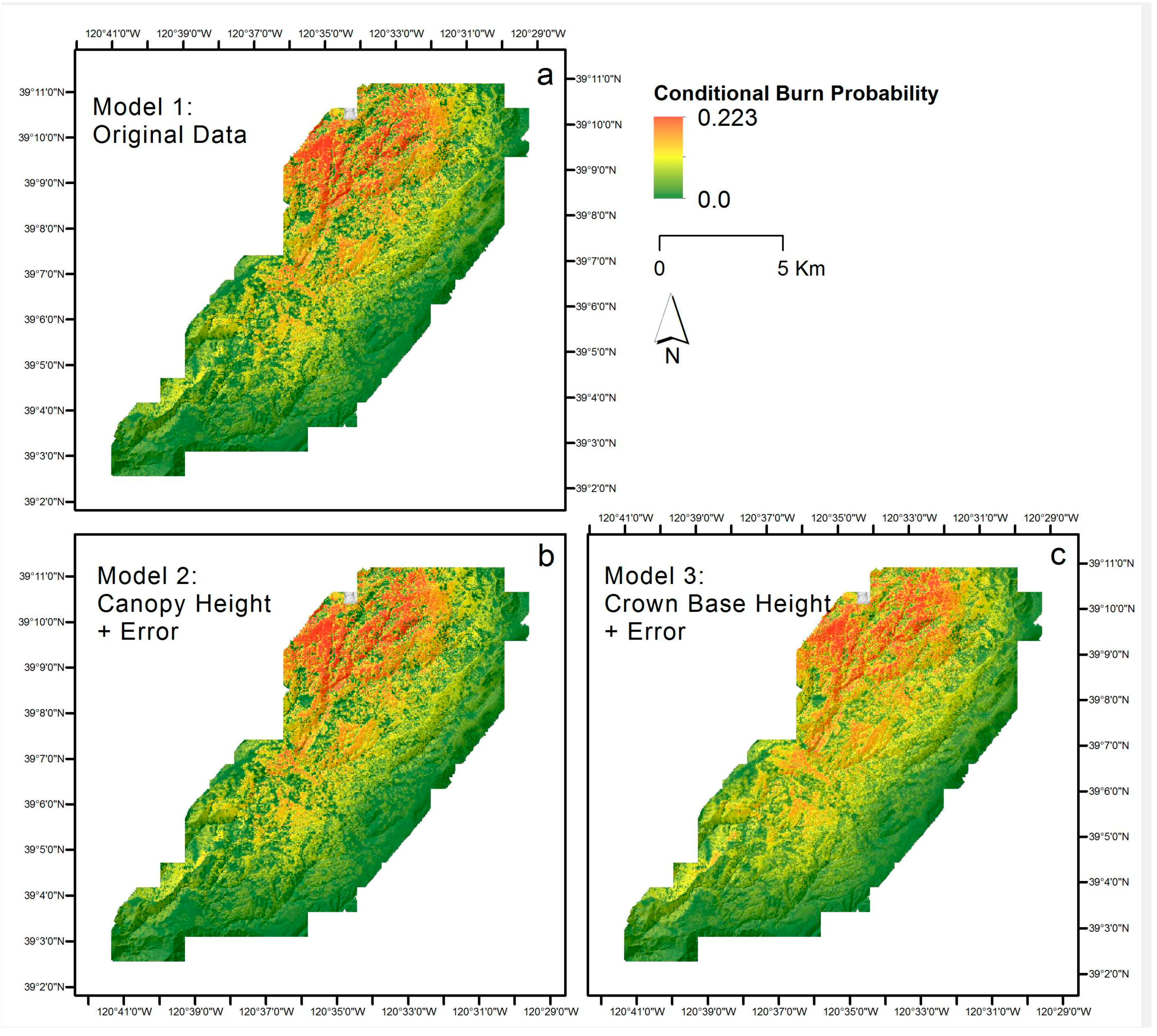
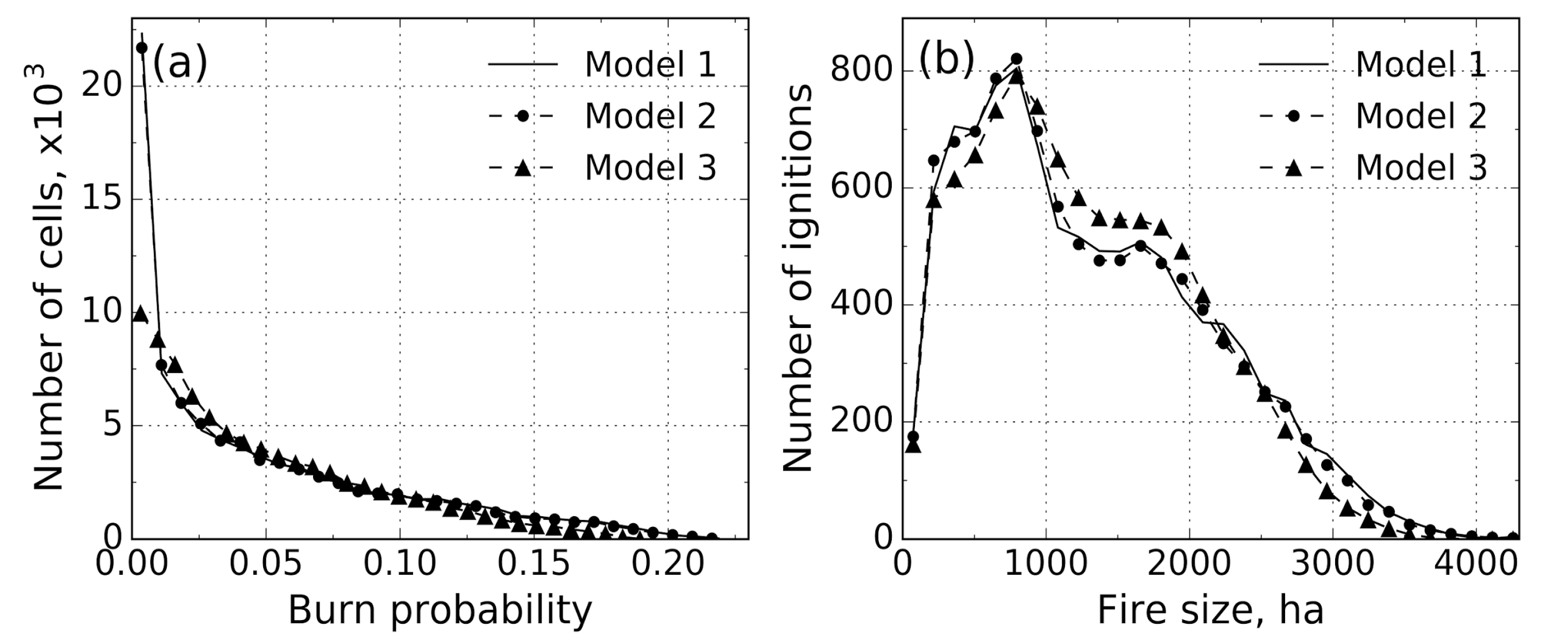
3.2. Fire Behavior Model Results
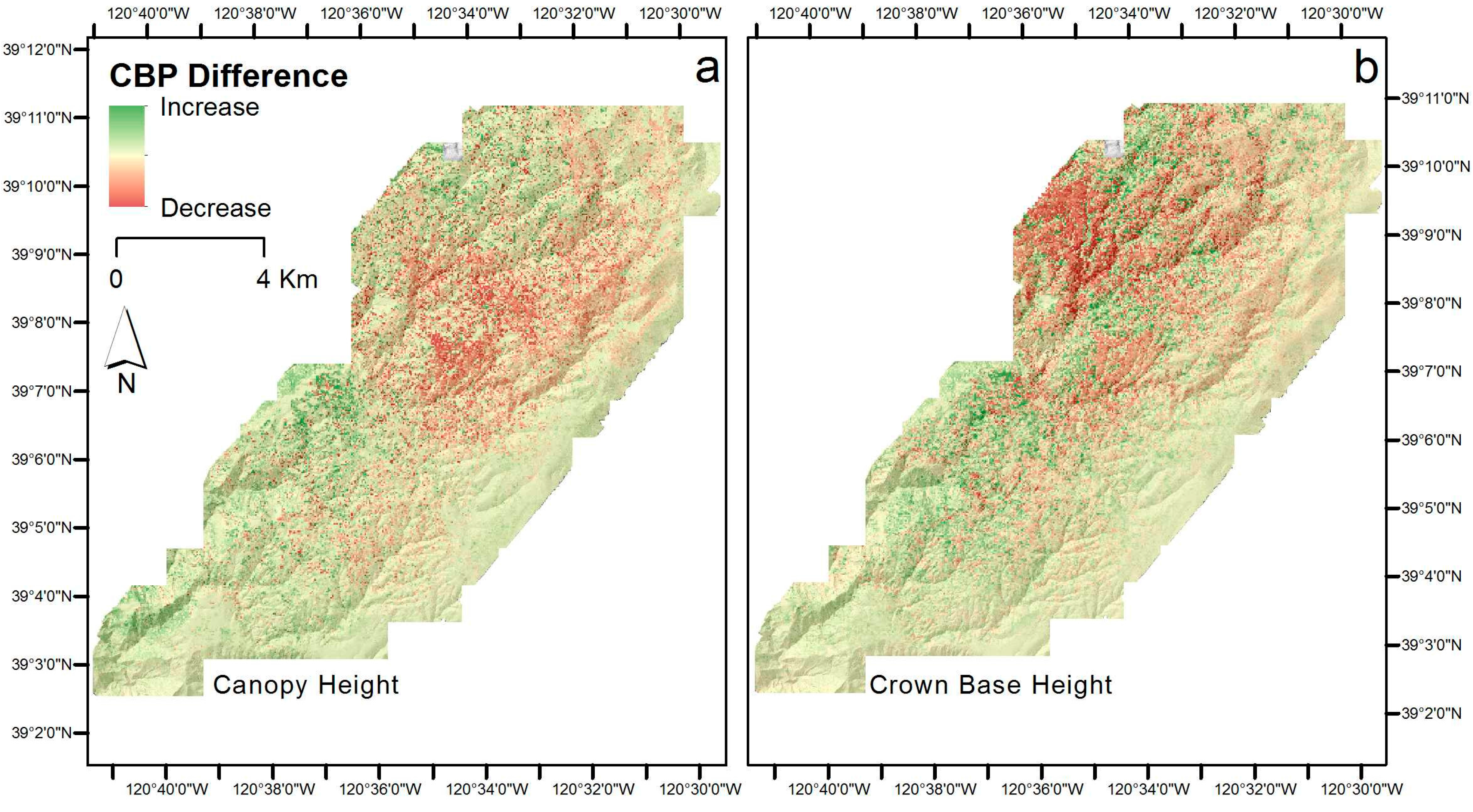
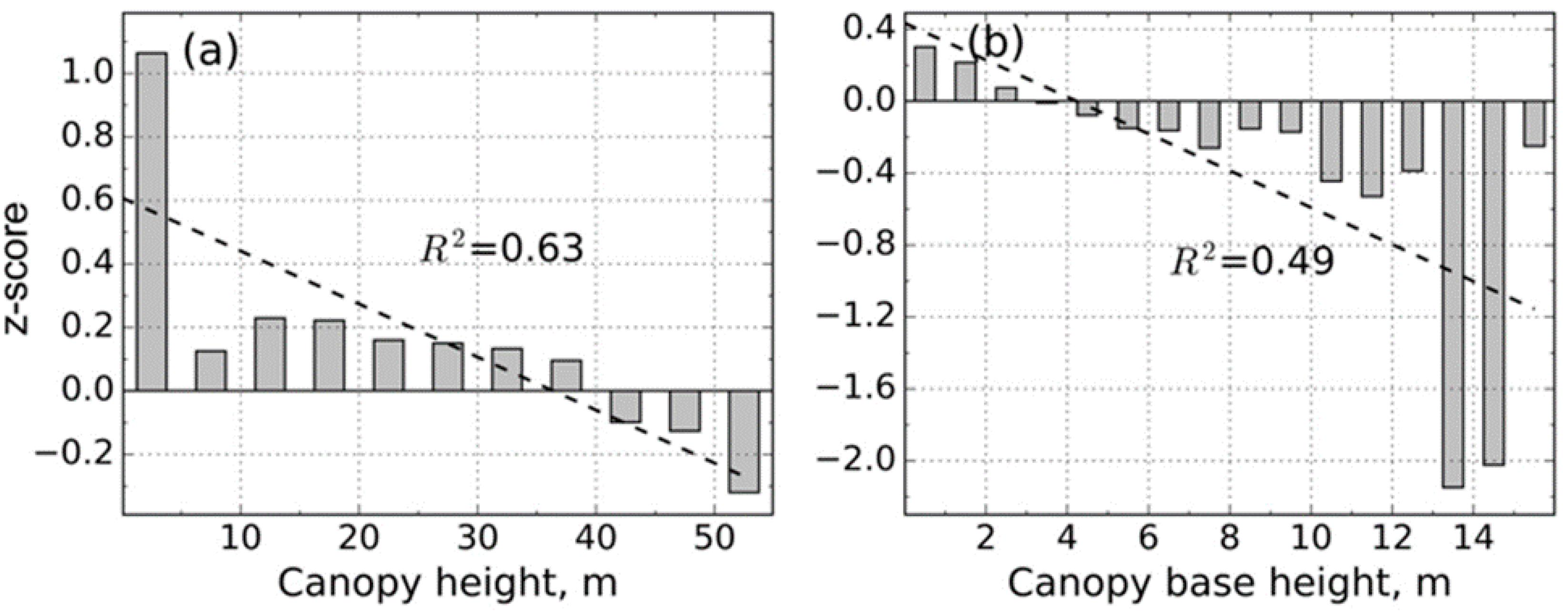
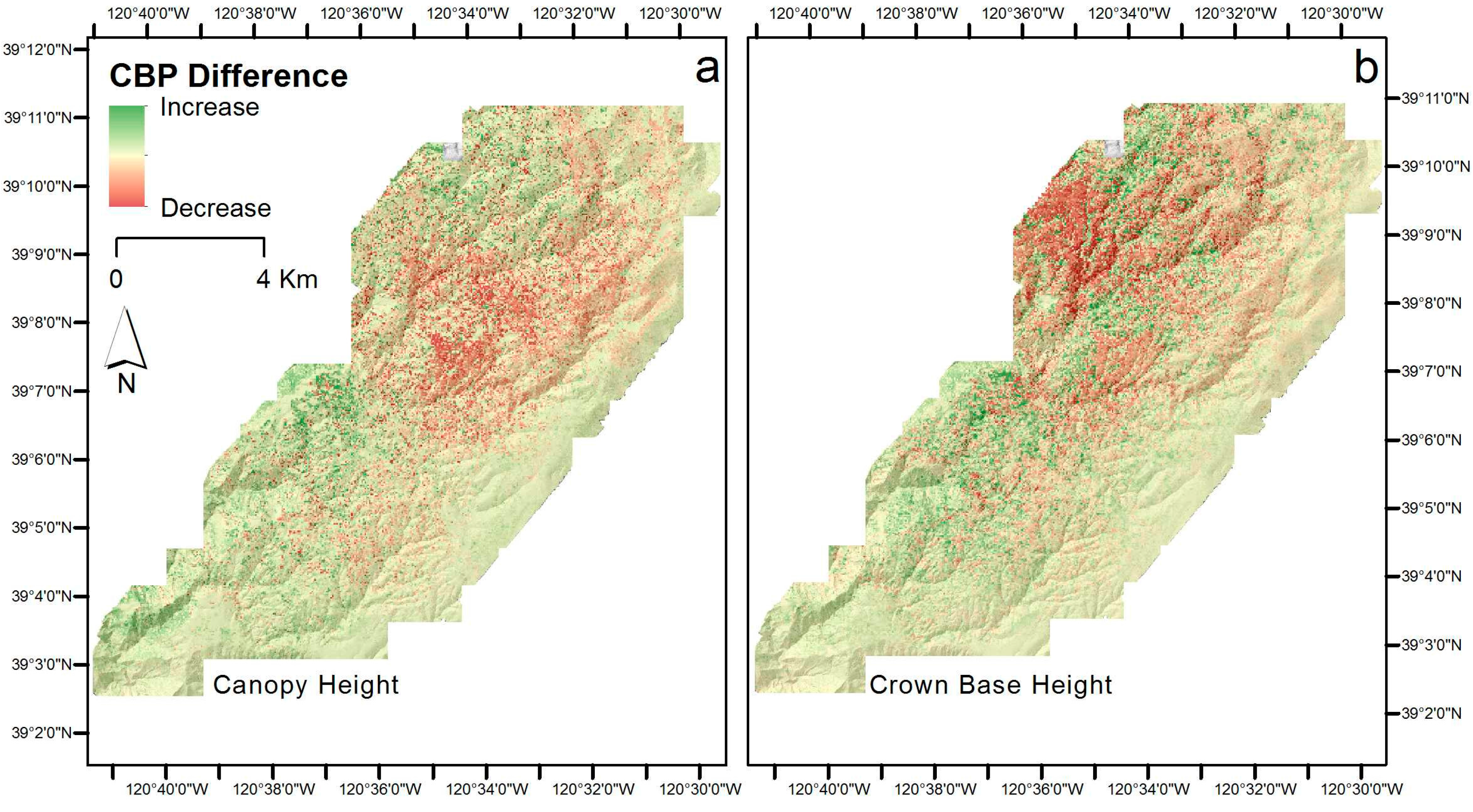
3.3. Relationship Between Significant Difference in CBP and Model Input Variables
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Stephens, S.L.; Collins, B.M.; Biber, E.; Fulé, P.Z. US federal fire and forest policy: Emphasizing resilience in dry forests. Ecosphere 2016, 7. [Google Scholar] [CrossRef]
- Hessburg, P.F.; Churchill, D.J.; Larson, A.J.; Haugo, R.D.; Miller, C.; Spies, T.A.; North, M.P.; Povak, N.A.; Belote, R.T.; Singleton, P.H. Others Restoring fire-prone Inland Pacific landscapes: Seven core principles. Landsc. Ecol. 2015, 30, 1805–1835. [Google Scholar] [CrossRef]
- Williams, A.P.; Allen, C.D.; Millar, C.I.; Swetnam, T.W.; Michaelsen, J.; Still, C.J.; Leavitt, S.W. Forest responses to increasing aridity and warmth in the southwestern United States. Proc. Natl. Acad. Sci. USA 2010, 107, 21289–21294. [Google Scholar] [CrossRef] [PubMed]
- Allen, C.D. Interactions across Spatial Scales among Forest Dieback, Fire, and Erosion in Northern New Mexico Landscapes. Ecosystems 2007, 10, 797–808. [Google Scholar] [CrossRef]
- Williams, A.P.; Seager, R.; Berkelhammer, M.; Macalady, A.K.; Crimmins, M.A.; Swetnam, T.W.; Trugman, A.T.; Buenning, N.; Hryniw, N.; McDowell, N.G.; et al. Causes and Implications of Extreme Atmospheric Moisture Demand during the Record-Breaking 2011 Wildfire Season in the Southwestern United States. J. Appl. Meteorol. Climatol. 2014, 53, 2671–2684. [Google Scholar] [CrossRef]
- Collins, B.M.; Stephens, S.L.; Moghaddas, J.J.; Battles, J. Challenges and approaches in planning fuel treatments across fire-excluded forested landscapes. J. For. 2010, 108, 24–31. [Google Scholar]
- Collins, B.M.; Stephens, S.L.; Roller, G.B.; Battles, J.J. Simulating fire and forest dynamics for a landscape fuel treatment project in the Sierra Nevada. For. Sci. 2011, 57, 77–88. [Google Scholar]
- Collins, B.M.; Kramer, H.A.; Menning, K.; Dillingham, C.; Saah, D.; Stine, P.A.; Stephens, S.L. Modeling hazardous fire potential within a completed fuel treatment network in the northern Sierra Nevada. For. Ecol. Manag. 2013, 310, 156–166. [Google Scholar] [CrossRef]
- Miller, C.; Ager, A.A. A review of recent advances in risk analysis for wildfire management. Int. J. Wildland Fire 2013, 22, 1–14. [Google Scholar] [CrossRef]
- Moghaddas, J.J.; Collins, B.M.; Menning, K.; Moghaddas, E.E.Y.; Stephens, S.L. Fuel treatment effects on modeled landscape-level fire behavior in the northern Sierra Nevada. Can. J. For. Res. 2010, 40, 1751–1765. [Google Scholar] [CrossRef]
- Hollingsworth, L.T.; Kurth, L.L.; Parresol, B.R.; Ottmar, R.D.; Prichard, S.J. A comparison of geospatially modeled fire behavior and fire management utility of three data sources in the southeastern United States. For. Ecol. Manag. 2012, 273, 43–49. [Google Scholar] [CrossRef]
- Ager, A.A.; Finney, M.A.; Kerns, B.K.; Maffei, H. Modeling wildfire risk to northern spotted owl (Strix occidentalis caurina) habitat in Central Oregon, USA. For. Ecol. Manag. 2007, 246, 45–56. [Google Scholar] [CrossRef]
- Ager, A.A.; Vaillant, N.M.; Finney, M.A. A comparison of landscape fuel treatment strategies to mitigate wildland fire risk in the urban interface and preserve old forest structure. For. Ecol. Manag. 2010, 259, 1556–1570. [Google Scholar] [CrossRef]
- Keane, R.E.; Burgan, R.; van Wagtendonk, J. Mapping wildland fuels for fire management across multiple scales: Integrating remote sensing, GIS, and biophysical modeling. Int. J. Wildland Fire 2001, 10, 301–319. [Google Scholar] [CrossRef]
- Keane, R.E.; Reeves, M. Use of Expert Knowledge to Develop Fuel Maps for Wildland Fire Management. In Expert Knowledge and Its Application in Landscape Ecology; Springer: New York, NY, USA, 2012; pp. 211–228. ISBN 9781461410331. [Google Scholar]
- Krasnow, K.D.; Fry, D.L.; Stephens, S.L. Spatial, temporal and latitudinal components of historical fire regimes in mixed conifer forests, California. J. Biogeogr. 2017, 44, 1239–1253. [Google Scholar] [CrossRef]
- Burgan, R.E.; Rothermel, R.C. Authors BEHAVE: Fire Behavior Prediction and Fuel Modeling System—FUEL Subsystem; USDA Forest Service: Washington, DC, USA, 1984. [Google Scholar]
- Finney, M.A. FARSITE, Fire Area Simulator—Model Development and Evaluation; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 1998; Volume 3.
- Finney, M.A. An overview of FlamMap fire modeling capabilities. In Fuels Management-–How to Measure Success; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2006; pp. 213–220. [Google Scholar]
- Jakubowski, M.K.; Guo, Q.; Collins, B.; Stephens, S.; Kelly, M. Predicting Surface Fuel Models and Fuel Metrics Using Lidar and CIR Imagery in a Dense, Mountainous Forest. Photogramm. Eng. Remote Sens. 2013, 79, 37–49. [Google Scholar] [CrossRef]
- Scott, J.H.; Reinhardt, E.D. Assessing crown fire potential by linking models of surface and crown fire behavior. In USDA Forest Service Research Note; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2001; p. 1. [Google Scholar]
- Hall, S.A.; Burke, I.C. Considerations for characterizing fuels as inputs for fire behavior models. For. Ecol. Manag. 2006, 227, 102–114. [Google Scholar] [CrossRef]
- Reinhardt, E.D.; Crookston, N.L. The Fire and Fuels Extension to the Forest Vegetation Simulator; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Colorado, CO, USA, 2003.
- Van Wagner, C.E. Prediction of crown fire behavior in two stands of jack pine. Can. J. For. Res. 1993, 23, 442–449. [Google Scholar] [CrossRef]
- Sando, R.W.; Wick, C.H. A Method of Evaluating Crown Fuels in Forest Stands; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 1972.
- Schmidt, D.A.; Taylor, A.H.; Skinner, C.N. The influence of fuels treatment and landscape arrangement on simulated fire behavior, Southern Cascade range, California. For. Ecol. Manag. 2008, 255, 3170–3184. [Google Scholar] [CrossRef]
- Andersen, H.-E.; McGaughey, R.J.; Reutebuch, S.E. Estimating forest canopy fuel parameters using LIDAR data. Remote Sens. Environ. 2005, 94, 441–449. [Google Scholar] [CrossRef]
- Kelly, M.; Di Tommaso, S. Mapping forests with Lidar provides flexible, accurate data with many uses. Calif. Agric. 2015, 69, 14–20. [Google Scholar] [CrossRef]
- Zhao, F.; Guo, Q.; Kelly, M. Allometric equation choice impacts lidar-based forest biomass estimates: A case study from the Sierra National Forest, CA. Agric. For. Meteorol. 2012, 165, 64–72. [Google Scholar] [CrossRef]
- Su, Y.; Ma, Q.; Guo, Q. Fine-resolution forest tree height estimation across the Sierra Nevada through the integration of spaceborne LiDAR, airborne LiDAR, and optical imagery. Int. J. Digit. Earth 2017, 10, 307–323. [Google Scholar] [CrossRef]
- Su, Y.; Guo, Q.; Collins, B.M.; Fry, D.L.; Hu, T.; Kelly, M. Forest fuel treatment detection using multi-temporal airborne lidar data and high-resolution aerial imagery: A case study in the Sierra Nevada Mountains, California. Int. J. Remote Sens. 2016, 37, 3322–3345. [Google Scholar] [CrossRef]
- Su, Y.; Guo, Q.; Fry, D.L.; Collins, B.M.; Kelly, M.; Flanagan, J.P.; Battles, J.J. A Vegetation Mapping Strategy for Conifer Forests by Combining Airborne LiDAR Data and Aerial Imagery. Can. J. Remote Sens. 2016, 42, 1–15. [Google Scholar] [CrossRef]
- McRoberts, R.E.; Næsset, E.; Gobakken, T. Inference for lidar-assisted estimation of forest growing stock volume. Remote Sens. Environ. 2013, 128, 268–275. [Google Scholar] [CrossRef]
- Hyde, P.; Dubayah, R.; Peterson, B.; Blair, J.B.; Hofton, M.; Hunsaker, C.; Knox, R.; Walker, W. Mapping forest structure for wildlife habitat analysis using waveform lidar: Validation of montane ecosystems. Remote Sens. Environ. 2005, 96, 427–437. [Google Scholar] [CrossRef]
- Erdody, T.L.; Moskal, L.M. Fusion of LiDAR and imagery for estimating forest canopy fuels. Remote Sens. Environ. 2010, 114, 725–737. [Google Scholar] [CrossRef]
- Heuvelink, G.B.M. Error Propagation in Environmental Modelling with GIS; CRC Press: Boca Raton, FL, USA, 1998; ISBN 9780748407446. [Google Scholar]
- White, J.C.; Coops, N.C.; Wulder, M.A.; Vastaranta, M.; Hilker, T.; Tompalski, P. Remote Sensing Technologies for Enhancing Forest Inventories: A Review. Can. J. Remote Sens. 2016, 42, 619–641. [Google Scholar] [CrossRef]
- Kramer, H.; Collins, B.; Lake, F.; Jakubowski, M.; Stephens, S.; Kelly, M. Estimating Ladder Fuels: A New Approach Combining Field Photography with LiDAR. Remote Sens. 2016, 8, 766. [Google Scholar] [CrossRef]
- Ferraz, A.; Saatchi, S.; Mallet, C.; Jacquemoud, S.; Gonçalves, G.; Silva, C.A.; Soares, P.; Tomé, M.; Pereira, L. Airborne Lidar Estimation of Aboveground Forest Biomass in the Absence of Field Inventory. Remote Sens. 2016, 8, 653. [Google Scholar] [CrossRef]
- González-Ferreiro, E.; Arellano-Pérez, S.; Castedo-Dorado, F.; Hevia, A.; Vega, J.A.; Vega-Nieva, D.; Álvarez-González, J.G.; Ruiz-González, A.D. Modelling the vertical distribution of canopy fuel load using national forest inventory and low-density airbone laser scanning data. PLoS ONE 2017, 12, e0176114. [Google Scholar] [CrossRef] [PubMed]
- Riano, D.; Meier, E.; Allgöwer, B.; Chuvieco, E.; Ustin, S.L. Modeling airborne laser scanning data for the spatial generation of critical forest parameters in fire behavior modeling. Remote Sens. Environ. 2003, 86, 177–186. [Google Scholar] [CrossRef]
- González-Olabarria, J.-R.; Rodríguez, F.; Fernández-Landa, A.; Mola-Yudego, B. Mapping fire risk in the Model Forest of Urbión (Spain) based on airborne LiDAR measurements. For. Ecol. Manag. 2012, 282, 149–156. [Google Scholar] [CrossRef]
- Mutlu, M.; Popescu, S.C.; Zhao, K. Sensitivity analysis of fire behavior modeling with LIDAR-derived surface fuel maps. For. Ecol. Manag. 2008, 256, 289–294. [Google Scholar] [CrossRef]
- Mutlu, M.; Popescu, S.C.; Stripling, C.; Spencer, T. Mapping surface fuel models using lidar and multispectral data fusion for fire behavior. Remote Sens. Environ. 2008, 112, 274–285. [Google Scholar] [CrossRef]
- Wulder, M.A.; Bater, C.W.; Coops, N.C.; Hilker, T.; White, J.C. The role of LiDAR in sustainable forest management. For. Chron. 2008, 84, 807–826. [Google Scholar] [CrossRef]
- Akay, A.E.; Oğuz, H.; Karas, I.R.; Aruga, K. Using LiDAR technology in forestry activities. Environ. Monit. Assess. 2009, 151, 117–125. [Google Scholar] [CrossRef] [PubMed]
- Jakubowski, M.K.; Guo, Q.; Kelly, M. Tradeoffs between lidar pulse density and forest measurement accuracy. Remote Sens. Environ. 2013, 130, 245–253. [Google Scholar] [CrossRef]
- Butterfield, H.S.; Malmstrom, C.M. Experimental Use of Remote Sensing by Private Range Managers and Its Influence on Management Decisions. Rangel. Ecol. Manag. 2006, 59, 541–548. [Google Scholar] [CrossRef]
- Trigg, S.N.; Roy, D.P. A focus group study of factors that promote and constrain the use of satellite-derived fire products by resource managers in southern Africa. J. Environ. Manag. 2007, 82, 95–110. [Google Scholar] [CrossRef] [PubMed]
- Heuvelink, G.B.M.; Burrough, P.A. Error propagation in cartographic modelling using Boolean logic and continuous classification. Int. J. Geogr. Inf. Syst. 1993, 7, 231–246. [Google Scholar] [CrossRef]
- Heuvelink, G.B.M.; Burrough, P.A.; Stein, A. Propagation of errors in spatial modelling with GIS. Int. J. Geogr. Inf. Syst. 1989, 3, 303–322. [Google Scholar] [CrossRef]
- Crosetto, M.; Tarantola, S.; Saltelli, A. Sensitivity and uncertainty analysis in spatial modelling based on GIS. Agric. Ecosyst. Environ. 2000, 81, 71–79. [Google Scholar] [CrossRef]
- Goodchild, M.F. Integrating GIS and remote sensing for vegetation analysis and modeling: Methodological issues. J. Veg. Sci. 1994, 5, 615–626. [Google Scholar] [CrossRef]
- Goodchild, M.F.; Gopal, S. The Accuracy of Spatial Databases; CRC Press: Boca Raton, FL, USA, 1989; ISBN 9780203490235. [Google Scholar]
- Stephens, S.L.; Collins, B.M. Fire regimes of mixed conifer forests in the north-central Sierra Nevada at multiple spatial scales. Northwest Sci. 2004, 78, 12–23. [Google Scholar]
- Stephens, S.L.; Ruth, L.W. Federal Forest-Fire Policy in the United States. Ecol. Appl. 2005, 15, 532–542. [Google Scholar] [CrossRef]
- Guo, Q.; Li, W.; Yu, H.; Alvarez, O. Effects of topographic variability and lidar sampling density on several DEM interpolation methods. Photogramm. Eng. Remote Sens. 2010, 76, 701–712. [Google Scholar] [CrossRef]
- Collins, B.M.; Stevens, J.T.; Miller, J.D.; Stephens, S.L.; Brown, P.M.; North, M.P. Alternative characterization of forest fire regimes: Incorporating spatial patterns. Landsc. Ecol. 2017, 1–10. [Google Scholar] [CrossRef]
- Lucas, R.M.; Cronin, N.; Lee, A.; Moghaddam, M.; Witte, C.; Tickle, P. Empirical relationships between AIRSAR backscatter and LiDAR-derived forest biomass, Queensland, Australia. Remote Sens. Environ. 2006, 100, 407–425. [Google Scholar] [CrossRef]
- Scott, J.H.; Burgan, R.E. Standard Fire Behavior Fuel Models: A Comprehensive Set for Use with Rothermel’s Surface Fire Spread Model (RMRS-GTR-153); USDA Forest Service: Fort Collins, CO, USA, 2005.
- Lasaponara, R.; Lanorte, A.; Pignatti, S. Characterization and Mapping of Fuel Types for the Mediterranean Ecosystems of Pollino National Park in Southern Italy by Using Hyperspectral MIVIS Data. Earth Interact. 2006, 10, 1–11. [Google Scholar] [CrossRef]
- Ottmar, R.D.; Sandberg, D.V.; Riccardi, C.L.; Prichard, S.J. An overview of the Fuel Characteristic Classification System—Quantifying, classifying, and creating fuelbeds for resource planning. Can. J. For. Res. 2007, 37, 2383–2393. [Google Scholar] [CrossRef]
- Wagenbrenner, N.S.; Forthofer, J.M.; Lamb, B.K.; Shannon, K.S.; Butler, B.W. Downscaling surface wind predictions from numerical weather prediction models in complex terrain with WindNinja. Atmos. Chem. Phys. 2016, 16, 5229–5241. [Google Scholar] [CrossRef]
- Finney, M.A. Fire growth using minimum travel time methods. Can. J. For. Res. 2002, 32, 1420–1424. [Google Scholar] [CrossRef]
- Richards, G.D. An elliptical growth model of forest fire fronts and its numerical solution. Int. J. Numer. Methods Eng. 1990, 30, 1163–1179. [Google Scholar] [CrossRef]
- Rothermel, R.C. A Mathematical Model for Predicting Fire Spread in Wildland Fuels; USDA Forest Service, Intermountain Forest and Range Experiment Station: Fort Collins, CO, USA, 1972.
- Van Wagner, C.E. Conditions for the start and spread of crown fire. Can. J. For. Res. 1977, 7, 23–34. [Google Scholar] [CrossRef]
- Carmel, Y.; Paz, S.; Jahashan, F.; Shoshany, M. Assessing fire risk using Monte Carlo simulations of fire spread. For. Ecol. Manag. 2009, 257, 370–377. [Google Scholar] [CrossRef]
- Knight, I.; Coleman, J. A fire perimeter expansion algorithm-based on Huygens wavelet propagation. Int. J. Wildland Fire 1993, 3, 73–84. [Google Scholar] [CrossRef]
- LaCroix, J.J.; Ryu, S.-R.; Zheng, D.; Chen, J. Simulating fire spread with landscape management scenarios. For. Sci. 2006, 52, 522–529. [Google Scholar]
- Massada, A.B.; Radeloff, V.C.; Stewart, S.I.; Hawbaker, T.J. Wildfire risk in the wildland—Urban interface: A simulation study in northwestern Wisconsin. For. Ecol. Manag. 2009, 258, 1990–1999. [Google Scholar] [CrossRef]
- Sanderlin, J.C.; Van Gelder, R.J. A simulation of fire behavior and suppression effectiveness for operation support in wildland fire management. In Proceedings of the 1st International Conference on Mathematical Modeling, Huajuapan de León, Oaxaca, Mexico, 13–14 November 2014; pp. 619–630. [Google Scholar]
- Ager, A.A.; Vaillant, N.M.; Finney, M.A.; Preisler, H.K. Analyzing wildfire exposure and source—Sink relationships on a fire prone forest landscape. For. Ecol. Manag. 2012, 267, 271–283. [Google Scholar] [CrossRef]
- Finney, M.A.; Grenfell, I.C.; McHugh, C.W.; Seli, R.C.; Trethewey, D.; Stratton, R.D.; Brittain, S. A method for ensemble wildland fire simulation. Environ. Model. Assess. 2011, 16, 153–167. [Google Scholar] [CrossRef]
- Arca, B.; Duce, P.; Pellizzaro, G.; Laconi, M.; Salis, M.; Spano, D. Evaluation of FARSITE simulator in Mediterranean shrubland. For. Ecol. Manag. 2006, 234, S110. [Google Scholar] [CrossRef]
- Chiono, L.A.; Fry, D.L.; Collins, B.M.; Chatfield, A.H.; Stephens, S.L. Landscape-scale fuel treatment and wildfire impacts on carbon stocks and fire hazard in California spotted owl habitat. Ecosphere 2017, 8. [Google Scholar] [CrossRef]
- Lydersen, J.M.; Collins, B.M.; Knapp, E.E.; Roller, G.B.; Stephens, S. Relating fuel loads to overstorey structure and composition in a fire-excluded Sierra Nevada mixed conifer forest. Int. J. Wildland Fire 2015, 24, 484–494. [Google Scholar] [CrossRef]
- Maguya, A.S.; Tegel, K.; Junttila, V.; Kauranne, T.; Korhonen, M.; Burns, J.; Leppanen, V.; Sanz, B. Moving Voxel Method for Estimating Canopy Base Height from Airborne Laser Scanner Data. Remote Sens. 2015, 7, 8950–8972. [Google Scholar] [CrossRef]
- Kramer, H.; Collins, B.; Kelly, M.; Stephens, S. Quantifying Ladder Fuels: A New Approach Using LiDAR. For. Trees Livelihoods 2014, 5, 1432–1453. [Google Scholar] [CrossRef]
- Agee, J.K.; Skinner, C.N. Basic principles of forest fuel reduction treatments. For. Ecol. Manag. 2005, 211, 83–96. [Google Scholar] [CrossRef]
- Menning, K.M.; Stephens, S.L. Fire Climbing in the Forest: A Semiqualitative, Semiquantitative Approach to Assessing Ladder Fuel Hazards. West. J. Appl. For. 2007, 22, 88–93. [Google Scholar]
- Dubayah, R.O.; Drake, J.B. Lidar Remote Sensing for Forestry. J. For. 2000, 98, 44–46. [Google Scholar]
- Bye, I.J.; North, P.R.J.; Los, S.O.; Kljun, N.; Rosette, J.A.B.; Hopkinson, C.; Chasmer, L.; Mahoney, C. Estimating forest canopy parameters from satellite waveform LiDAR by inversion of the FLIGHT three-dimensional radiative transfer model. Remote Sens. Environ. 2017, 188, 177–189. [Google Scholar] [CrossRef]
- Peterson, B. Canopy Fuels Inventory and Mapping Using Large-Footprint LiDAR. Ph.D. Thesis, University of Maryland, College Park, MD, USA, 2005. [Google Scholar]
- McMahon, S.M.; Bebber, D.P.; Butt, N.; Crockatt, M.; Kirby, K.; Parker, G.G.; Riutta, T.; Slade, E.M. Ground based LiDAR demonstrates the legacy of management history to canopy structure and composition across a fragmented temperate woodland. For. Ecol. Manag. 2015, 335, 255–260. [Google Scholar] [CrossRef]
- De Almeida, D.R.A.; Nelson, B.W.; Schietti, J.; Gorgens, E.B.; Resende, A.F.; Stark, S.C.; Valbuena, R. Contrasting fire damage and fire susceptibility between seasonally flooded forest and upland forest in the Central Amazon using portable profiling LiDAR. Remote Sens. Environ. 2016, 184, 153–160. [Google Scholar] [CrossRef]
- Tempel, D.J.; Gutiérrez, R.J.; Battles, J.J.; Fry, D.L.; Su, Y.; Guo, Q.; Reetz, M.J.; Whitmore, S.A.; Jones, G.M.; Collins, B.M.; et al. Evaluating short- and long-term impacts of fuels treatments and simulated wildfire on an old-forest species. Ecosphere 2015, 6, art261. [Google Scholar] [CrossRef]
- Brosofske, K.D.; Froese, R.E.; Falkowski, M.J.; Banskota, A. A Review of Methods for Mapping and Prediction of Inventory Attributes for Operational Forest Management. For. Sci. 2014, 60, 733–756. [Google Scholar] [CrossRef]
- Woods, M.; Pitt, D.; Penner, M.; Lim, K.; Nesbitt, D.; Etheridge, D.; Treitz, P. Operational implementation of a LiDAR inventory in Boreal Ontario. For. Chron. 2011, 87, 512–528. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spatial Layer | Development Method |
|---|---|
| Topography (Elevation, Slope, Aspect) | Created directly from interpolated Lidar last return, and resampled from 1 m DEM |
| Canopy Cover | Directly calculated with Lidar |
| Canopy Height | Regression between field plot data and Lidar metrics |
| Canopy Base Height | Regression between field plot data and Lidar metrics |
| Canopy Bulk Density | Fire and Fuels Extension in Forest Vegetation Simulator, then regression with Lidar metrics |
| Fuel Model | Regression between plot-measured surface fuels and Lidar metrics |
| Weather | Remote Automated Weather Station (RAWS) |
| Scott and Burgan (2005) Fuel Model | Description of Stands with Fuel Model Assigned | % of Study Area |
|---|---|---|
| SH3 (143) | Basal Area < 50 m2 ha−1, Canopy Cover < 40%, moderate fuel load dominated by shrubs and forest litter | 26 |
| TU2 (162) | Basal Area 60 m2 ha−1, Canopy Cover > 30%, moderate fuel load dominated by shrubs and forest litter | 1 |
| TU5 (165) | Basal Area 20–80 m2 ha−1, Canopy Cover > 40%, high fuel load dominated by shrubs and forest litter | 29 |
| TL (189) | Basal Area 40–80 m2 ha−1, Canopy Cover > 30%, moderate to low site productivity | 52 |
| SB2 (202) | Basal Area > 40 m2 ha−1, Canopy Cover > 40%, high site productivity, moderate fuel load with coarse fuels present | 10 |
| Weather Input | Specific Parameter/Value | ||||
|---|---|---|---|---|---|
| Speed (km/h) | Direction (Degrees az.) | Relative Frequency | |||
| Wind | 19 | 225 | 0.75 | ||
| 20 | 45 | 0.10 | |||
| 19 | 180 | 0.05 | |||
| Fuel Type | 1 h | 10 h | 100 h | Live Herbaceous | Live Woody |
| Moisture Content (%) | 2 | 3 | 5 | 30 | 60 |
| Forest Variables | Mean (SD) | Minimum-Maximum | Regression Equation | R2 (RMSE) |
|---|---|---|---|---|
| Canopy Height (m) | 23.3 (10.1) | 0–51.9 | 4.73 − 0.82 × L25th + 1.88 × Lmean | 0.81 (4.12 m) |
| Crown base height (m) | 3.7 (2.4) | 0–12.7 | 0.17 + 0.25 × L10th + 0.30 × L25th | 0.51 (1.62 m) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kelly, M.; Su, Y.; Di Tommaso, S.; Fry, D.L.; Collins, B.M.; Stephens, S.L.; Guo, Q. Impact of Error in Lidar-Derived Canopy Height and Canopy Base Height on Modeled Wildfire Behavior in the Sierra Nevada, California, USA. Remote Sens. 2018, 10, 10. https://doi.org/10.3390/rs10010010
Kelly M, Su Y, Di Tommaso S, Fry DL, Collins BM, Stephens SL, Guo Q. Impact of Error in Lidar-Derived Canopy Height and Canopy Base Height on Modeled Wildfire Behavior in the Sierra Nevada, California, USA. Remote Sensing. 2018; 10(1):10. https://doi.org/10.3390/rs10010010
Chicago/Turabian StyleKelly, Maggi, Yanjun Su, Stefania Di Tommaso, Danny L. Fry, Brandon M. Collins, Scott L. Stephens, and Qinghua Guo. 2018. "Impact of Error in Lidar-Derived Canopy Height and Canopy Base Height on Modeled Wildfire Behavior in the Sierra Nevada, California, USA" Remote Sensing 10, no. 1: 10. https://doi.org/10.3390/rs10010010