SMOS Neural Network Soil Moisture Data Assimilation in a Land Surface Model and Atmospheric Impact

 , , , ,
, , , ,
Abstract
:
1. Introduction
2. Data
2.1. SMOS Level 3 Brightness Temperatures
2.2. HTESSEL Model Data
2.3. ECMWF Data Interpolated to the Grid of the SMOS Level 3 Brightness Temperatures Data Set
2.4. In Situ Measurements
3. Methods
3.1. Using a Neural Network to Compute a New Soil Moisture Data Set
3.2. Offline Surface-Only Land Data Assimilation System
3.3. Soil Moisture Analysis Evaluation against In Situ Measurements
3.4. Impact of the Soil Moisture Analysis on the Forecast
4. Results
4.1. Observations and Model Comparison
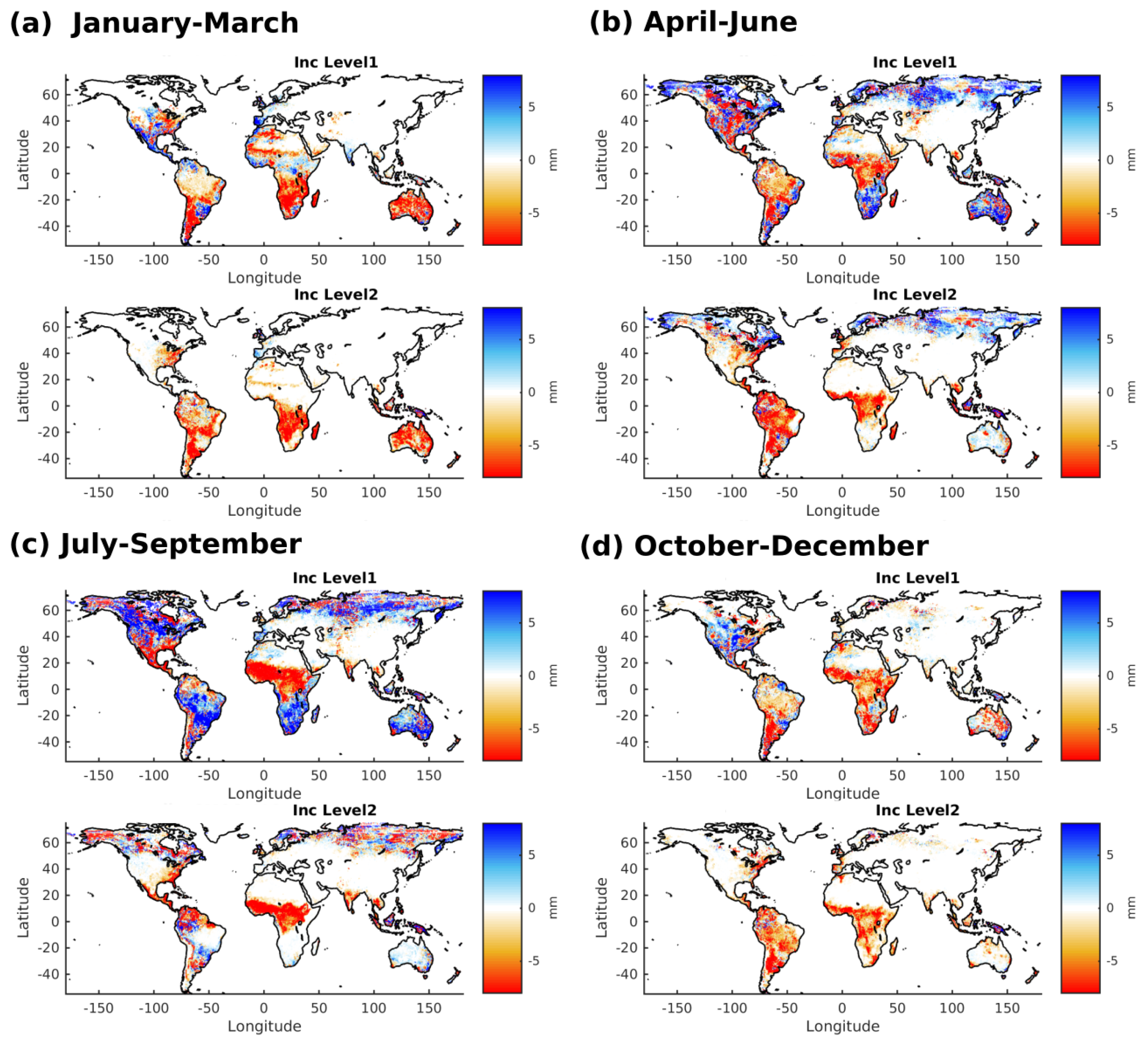
4.2. Data Assimilation
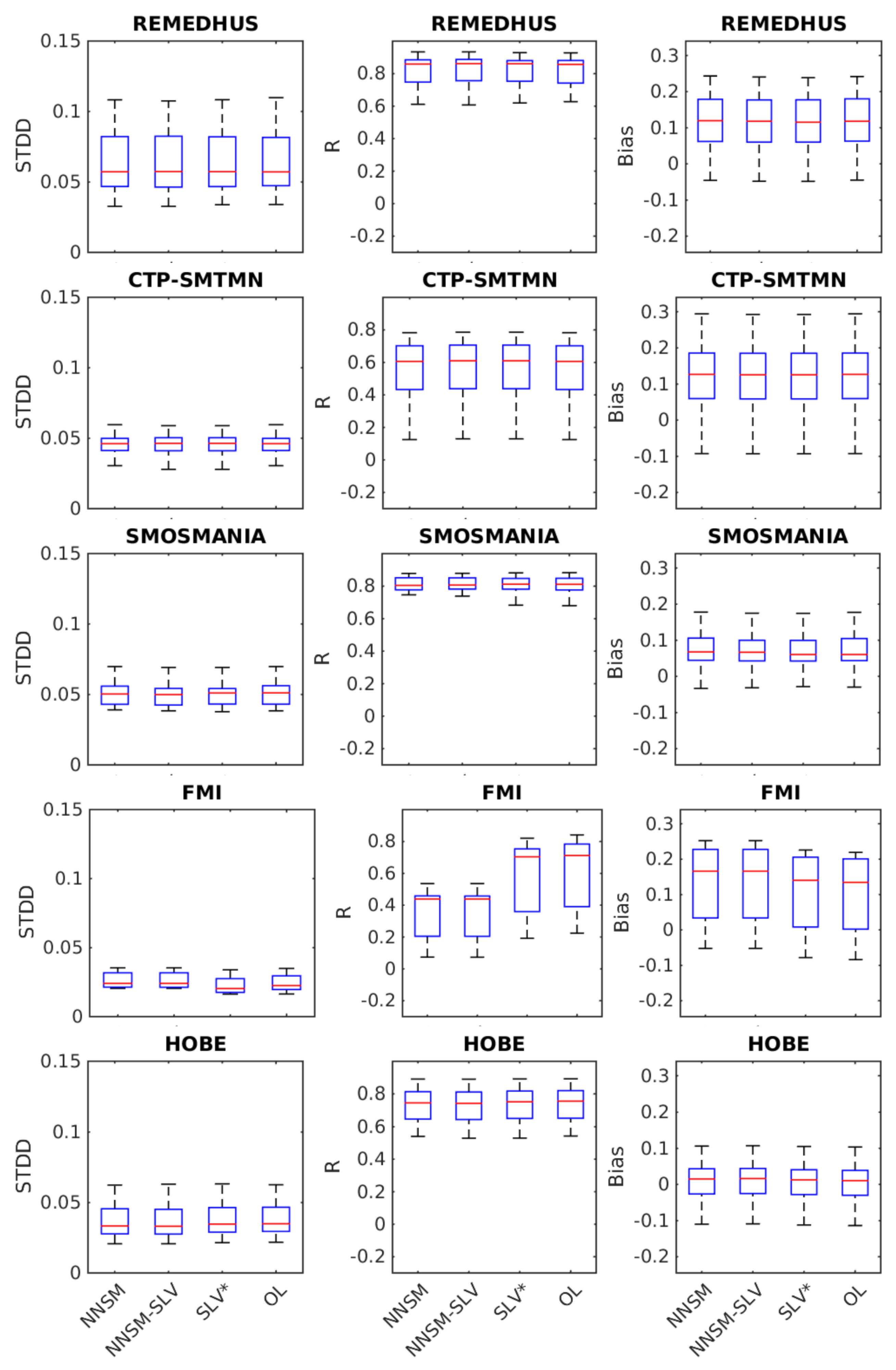
4.3. Evaluation of the Soil Moisture Analysis
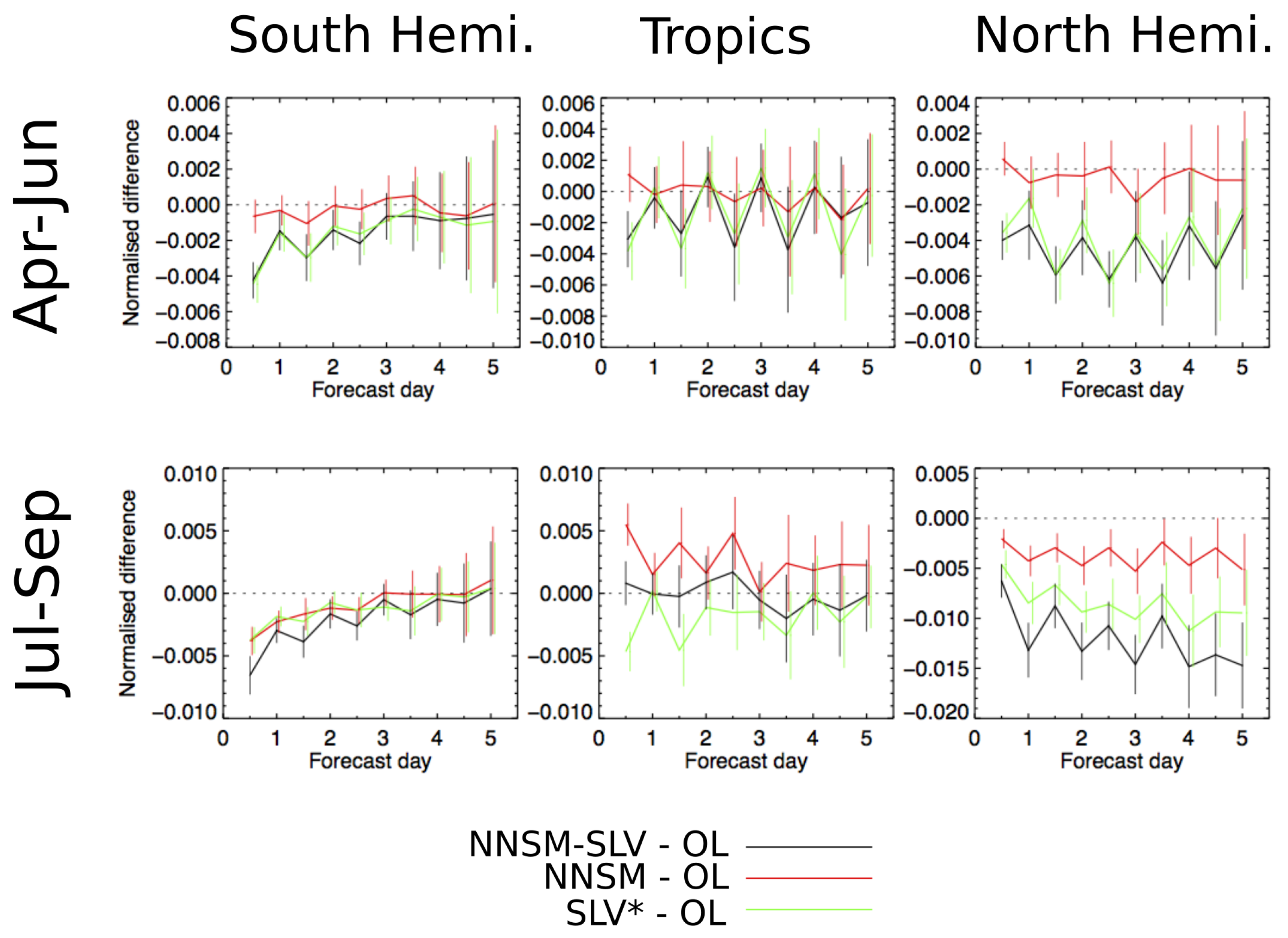
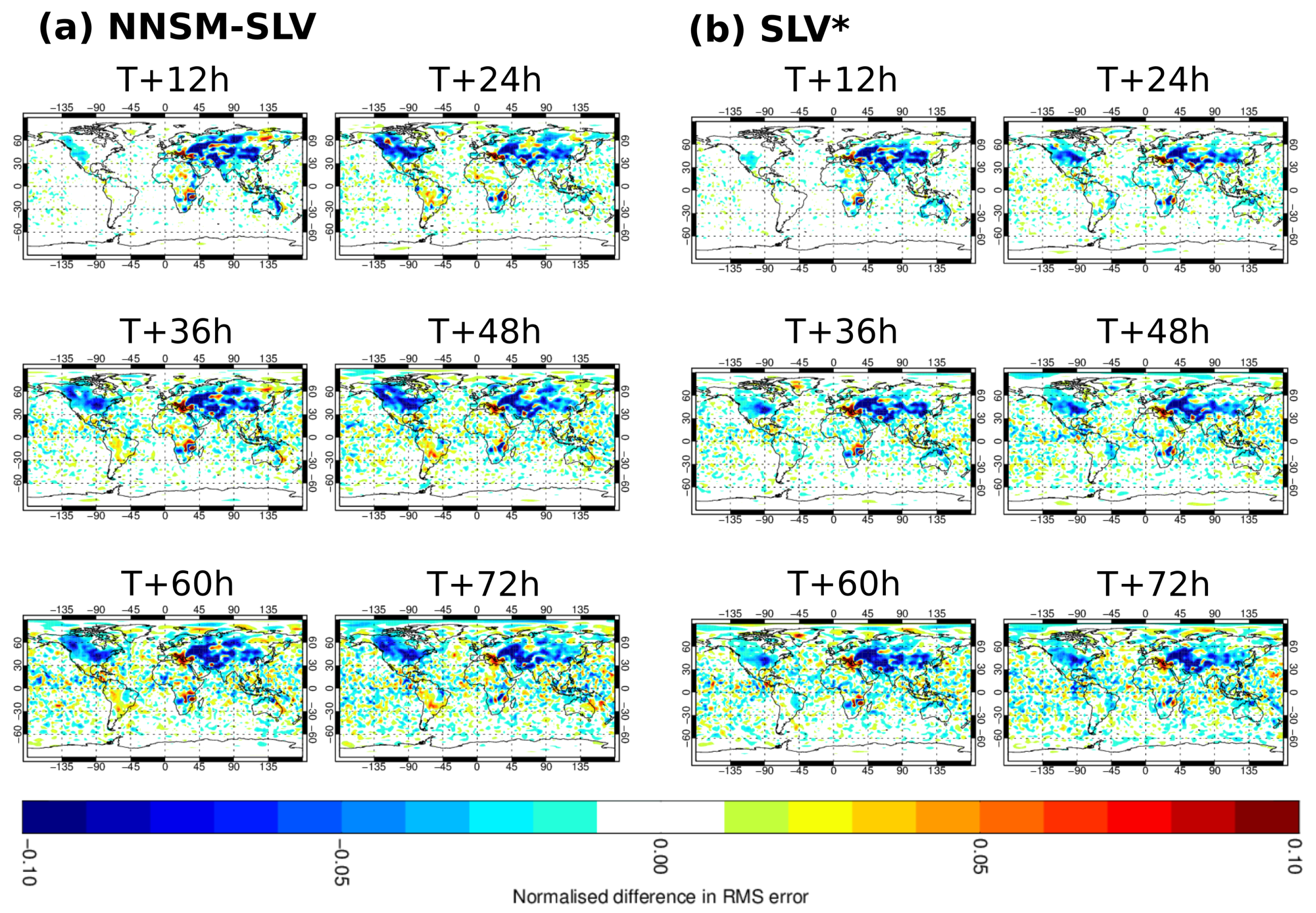
4.4. Sensitivity of the Atmosphere to the Soil Moisture Analysis
5. Discussion
5.1. On the Low Impact of the Soil Moisture Analysis at Locations with In Situ Measurements
5.2. On the Effect for Atmospheric Forecasts
6. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Koster, R.D.; Dirmeyer, P.A.; Guo, Z.; Bonan, G.; Chan, E.; Cox, P.; Gordon, C.T.; Kanae, S.; Kowalczyk, E.; Lawrence, D.; et al. Regions of strong coupling between soil moisture and precipitation. Science 2004, 305, 1138–1140. [Google Scholar] [CrossRef] [PubMed]
- Tuttle, S.; Salvucci, G. Empirical evidence of contrasting soil moisture–precipitation feedbacks across the United States. Science 2016, 352, 825–828. [Google Scholar] [CrossRef] [PubMed]
- Seneviratne, S.I.; Corti, T.; Davin, E.L.; Hirschi, M.; Jaeger, E.B.; Lehner, I.; Orlowsky, B.; Teuling, A.J. Investigating soil moisture–climate interactions in a changing climate: A review. Earth-Sci. Rev. 2010, 99, 125–161. [Google Scholar] [CrossRef]
- Parrens, M.; Mahfouf, J.F.; Barbu, A.; Calvet, J.C. Assimilation of surface soil moisture into a multilayer soil model: design and evaluation at local scale. Hydrol. Earth Syst. Sci. 2014, 18, 673–689. [Google Scholar] [CrossRef] [Green Version]
- De Lannoy, G.J.; Reichle, R.H. Global Assimilation of Multiangle and Multipolarization SMOS Brightness Temperature Observations into the GEOS-5 Catchment Land Surface Model for Soil Moisture Estimation. J. Hydrometeorol. 2016, 17, 669–691. [Google Scholar] [CrossRef] [Green Version]
- Lievens, H.; Lannoy, G.D.; Bitar, A.A.; Drusch, M.; Dumedah, G.; Franssen, H.J.H.; Kerr, Y.; Tomer, S.; Martens, B.; Merlin, O.; et al. Assimilation of SMOS soil moisture and brightness temperature products into a land surface model. Remote Sens. Environ. 2016, 180, 292–304. [Google Scholar] [CrossRef]
- Muñoz Sabater, J.; Lawrence, H.; Albergel, C.; de Rosnay, P.; Isaken, L.; Mecklenburg, S.; Kerr, Y.; Drusch, M. Assimilation of SMOS Brightness Temperatures in the ECMWF Integrated Forecasting System. QJRMS 2019, in press. [Google Scholar]
- Kerr, Y.; Waldteufel, P.; Wigneron, J.P.; Delwart, S.; Cabot, F.; Boutin, J.; Escorihuela, M.J.; Font, J.; Reul, N.; Gruhier, C.; et al. The SMOS Mission: New Tool for Monitoring Key Elements ofthe Global Water Cycle. Proc. IEEE 2010, 98, 666–687. [Google Scholar] [CrossRef] [Green Version]
- Muñoz-Sabater, J. Incorporation of passive microwave Brightness Temperatures in the ECMWF soil moisture analysis. Remote Sens. 2015, 7, 5758–5784. [Google Scholar] [CrossRef]
- De Rosnay, P.; Muñoz Sabater, J.; Albergel, C.; Isaken, L.; English, S.; Drusch, M.; Wigneron, J. SMOS brightness temperature forward modelling and long term monitoring at ECMWF. RSE 2019. submitted. [Google Scholar]
- Aires, F.; Prigent, C.; Buehler, S.A.; Eriksson, P.; Milz, M.; Crewell, S. Towards more realistic hypotheses for the information content analysis of cloudy/precipitating situations–Application to a hyperspectral instrument in the microwave. Q. J. R. Meteorol. Soc. 2019, 145, 1–14. [Google Scholar] [CrossRef]
- Rodríguez-Fernández, N.J.; Muñoz-Sabater, J.; Richaume, P.; Albergel, C.; de Rosnay, P.; Kerr, Y.H.; Drusch, M.; Mecklenburg, S. SMOS near real time soil moisture product: Processor overview and first validation results. Hydrol. Earth Syst. Sci. 2017, 21, 5201–5216. [Google Scholar] [CrossRef]
- Xu, X.; Tolson, B.A.; Li, J.; Staebler, R.M.; Seglenieks, F.; Haghnegahdar, A.; Davison, B. Assimilation of SMOS soil moisture over the Great Lakes basin. Remote Sens. Environ. 2015, 169, 163–175. [Google Scholar] [CrossRef]
- Leroux, D.J.; Pellarin, T.; Vischel, T.; Cohard, J.M.; Gascon, T.; Gibon, F.; Mialon, A.; Galle, S.; Peugeot, C.; Seguis, L. Assimilation of SMOS soil moisture into a distributed hydrological model and impacts on the water cycle variables over the Ouémé catchment in Benin. Hydrol. Earth Syst. Sci. 2016, 20, 2827–2840. [Google Scholar] [CrossRef]
- Blankenship, C.B.; Case, J.L.; Zavodsky, B.T.; Crosson, W.L. Assimilation of SMOS Retrievals in the Land Information System. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6320–6332. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Martens, B.; Miralles, D.; Lievens, H.; Fernández-Prieto, D.; Verhoest, N. Improving terrestrial evaporation estimates over continental Australia through assimilation of SMOS soil moisture. Int. J. Appl. Earth Obs. Geoinf. 2016, 48, 146–162. [Google Scholar] [CrossRef]
- Ridler, M.E.; Madsen, H.; Stisen, S.; Bircher, S.; Fensholt, R. Assimilation of SMOS-derived soil moisture in a fully integrated hydrological and soil-vegetation-atmosphere transfer model in Western Denmark. Water Resour. Res. 2014, 50, 8962–8981. [Google Scholar] [CrossRef]
- Scholze, M.; Kaminski, T.; Knorr, W.; Blessing, S.; Vossbeck, M.; Grant, J.; Scipal, K. Simultaneous assimilation of SMOS soil moisture and atmospheric CO2 in-situ observations to constrain the global terrestrial carbon cycle. Remote Sens. Environ. 2016, 180, 334–345. [Google Scholar] [CrossRef]
- Drusch, M.; Wood, E.; Gao, H. Observation operators for the direct assimilation of TRMM microwave imager retrieved soil moisture. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef]
- De Rosnay, P.; Drusch, M.; Vasiljevic, D.; Balsamo, G.; Albergel, C.; Isaksen, L. A simplified Extended Kalman Filter for the global operational soil moisture analysis at ECMWF. Q. J. R. Meteorol. Soc. 2013, 139, 1199–1213. [Google Scholar] [CrossRef]
- Aires, F.; Prigent, C.; Rossow, W.B. Sensitivity of satellite microwave and infrared observations to soil moisture at a global scale: 2. Global statistical relationships. J. Geophys. Res. 2005, 110. [Google Scholar] [CrossRef] [Green Version]
- Aires, F.; Prigent, C. Toward a new generation of satellite surface products? J. Geophys. Res. Atmos. (1984–2012) 2006, 111. [Google Scholar] [CrossRef] [Green Version]
- Rodríguez-Fernández, N.J.; Aires, F.; Richaume, P.; Kerr, Y.H.; Prigent, C.; Kolassa, J.; Cabot, F.; Jiménez, C.; Mahmoodi, A.; Drusch, M. Soil moisture retrieval using neural networks: Application to SMOS. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5991–6007. [Google Scholar] [CrossRef]
- Jiménez, C.; Clark, D.B.; Kolassa, J.; Aires, F.; Prigent, C. A joint analysis of modeled soil moisture fields and satellite observations. J. Geophys. Res. Atmos. 2013, 118, 6771–6782. [Google Scholar] [CrossRef] [Green Version]
- Seuffert, G.; Wilker, H.; Viterbo, P.; Drusch, M.; Mahfouf, J. The usage of screen-level parameters and microwave brightness temperature for soil moisture analysis. J. Hydrometeorol. 2004, 5, 516–531. [Google Scholar] [CrossRef]
- Kalnay, E. Atmospheric Modeling, Data Assimilation and Predictability; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar] [CrossRef]
- Mahfouf, J.F. Analysis of soil moisture from near-surface parameters: A feasibility study. J. Appl. Meteorol. 1991, 30, 1534–1547. [Google Scholar] [CrossRef]
- Douville, H.; Viterbo, P.; Mahfouf, J.F.; Beljaars, A.C. Evaluation of the optimum interpolation and nudging techniques for soil moisture analysis using FIFE data. Mon. Weather Rev. 2000, 128, 1733–1756. [Google Scholar] [CrossRef]
- Balsamo, G.; Bouyssel, F.; Noilhan, J. A simplified bi-dimensional variational analysis of soil moisture from screen-level observations in a mesoscale numerical weather-prediction model. Q. J. R. Meteorol. Soc. 2004, 130, 895–915. [Google Scholar] [CrossRef]
- Mahfouf, J.F.; Bergaoui, K.; Draper, C.; Bouyssel, F.; Taillefer, F.; Taseva, L. A comparison of two off-line soil analysis schemes for assimilation of screen level observations. J. Geophys. Res. Atmos. 2009, 114. [Google Scholar] [CrossRef]
- Balsamo, G.; Mahfouf, J.; Bélair, S.; Deblonde, G. A land data assimilation system for soil moisture and temperature: An information content study. J. Hydrometeorol. 2007, 8, 1225–1242. [Google Scholar] [CrossRef]
- Drusch, M.; Scipal, K.; De Rosnay, P.; Balsamo, G.; Andersson, E.; Bougeault, P.; Viterbo, P. Towards a Kalman Filter based soil moisture analysis system for the operational ECMWF Integrated Forecast System. Geophys. Res. Lett. 2009, 36. [Google Scholar] [CrossRef]
- Drusch, M. Initializing numerical weather prediction models with satellite-derived surface soil moisture: Data assimilation experiments with ECMWF’s Integrated Forecast System and the TMI soil moisture data set. J. Geophys. Res. Atmos. (1984–2012) 2007, 112. [Google Scholar] [CrossRef]
- Scipal, K.; Drusch, M.; Wagner, W. Assimilation of a ERS scatterometer derived soil moisture index in the ECMWF numerical weather prediction system. Adv. Water Resour. 2008, 31, 1101–1112. [Google Scholar] [CrossRef]
- Al Bitar, A.; Mialon, A.; Kerr, Y.; Cabot, F.; Richaume, P.; Jacquette, E.; Quesney, A.; Mahmoodi, A.; Tarot, S.; Parrens, M.; et al. The Global SMOS Level 3 daily soil moisture and brightness temperature maps. Earth Syst. Sci. Data 2017, 9, 293–315. [Google Scholar] [CrossRef]
- Brodzik, M.J.; Billingsley, B.; Haran, T.; Raup, B.; Savoie, M.H. EASE-Grid 2.0: Incremental but Significant Improvements for Earth-Gridded Data Sets. ISPRS Int. J. Geo-Inf. 2012, 1, 32–45. [Google Scholar] [CrossRef] [Green Version]
- Balsamo, G.; Beljaars, A.; Scipal, K.; Viterbo, P.; van den Hurk, B.; Hirschi, M.; Betts, A.K. A revised hydrology for the ECMWF model: Verification from field site to terrestrial water storage and impact in the Integrated Forecast System. J. Hydrometeorol. 2009, 10, 623–643. [Google Scholar] [CrossRef]
- Balsamo, G.; Dutra, E.; Boussetta, S.; Beljaars, A.; Viterbo, P.; van den Hurk, B. Recent advances in land surface modelling at ECMWF. In Proceedings of the ECMWF/GLASS workshop on Land Surface Modelling, Reading, UK, 9–12 November 2009; pp. 9–12. [Google Scholar]
- Albergel, C.; Balsamo, G.; Rosnay, P.d.; Muñoz-Sabater, J.; Boussetta, S. A bare ground evaporation revision in the ECMWF land-surface scheme: Evaluation of its impact using ground soil moisture and satellite microwave data. Hydrol. Earth Syst. Sci. 2012, 16, 3607–3620. [Google Scholar] [CrossRef]
- Boussetta, S.; Balsamo, G.; Beljaars, A.; Kral, T.; Jarlan, L. Impact of a satellite-derived leaf area index monthly climatology in a global numerical weather prediction model. Int. J. Remote Sens. 2013, 34, 3520–3542. [Google Scholar] [CrossRef]
- Balsamo, G.; Albergel, C.; Beljaars, A.; Boussetta, S.; Brun, E.; Cloke, H.; Dee, D.; Dutra, E.; Muñoz-Sabater, J.; Pappenberger, F.; et al. ERA-Interim/Land: A global land surface reanalysis data set. Hydrol. Earth Syst. Sci. 2015, 19, 389–407. [Google Scholar] [CrossRef]
- Dee, D.; Uppala, S.; Simmons, A.; Berrisford, P.; Poli, P.; Kobayashi, S.; Andrae, U.; Balmaseda, M.; Balsamo, G.; Bauer, P.; et al. The ERA-Interim reanalysis: Configuration and performance of the data assimilation system. Q. J. R. Meteorol. Soc. 2011, 137, 553–597. [Google Scholar] [CrossRef]
- De Rosnay, P.; Balsamo, G.; Albergel, C.; Muñoz-Sabater, J.; Isaksen, L. Initialisation of land surface variables for numerical weather prediction. Surv. Geophys. 2014, 35, 607–621. [Google Scholar] [CrossRef]
- Dorigo, W.; Wagner, W.; Hohensinn, R.; Hahn, S.; Paulik, C.; Xaver, A.; Gruber, A.; Drusch, M.; Mecklenburg, S.; Oevelen, P.v.; et al. The International Soil Moisture Network: A data hosting facility for global in situ soil moisture measurements. Hydrol. Earth Syst. Sci. 2011, 15, 1675–1698. [Google Scholar] [CrossRef]
- Tagesson, T.; Fensholt, R.; Guiro, I.; Rasmussen, M.O.; Huber, S.; Mbow, C.; Garcia, M.; Horion, S.; Sandholt, I.; Holm-Rasmussen, B.; et al. Ecosystem properties of semiarid savanna grassland in West Africa and its relationship with environmental variability. Glob. Chang. Biol. 2015, 21, 250–264. [Google Scholar] [CrossRef] [PubMed]
- Martínez-Fernández, J.; Ceballos, A. Mean soil moisture estimation using temporal stability analysis. J. Hydrol. 2005, 312, 28–38. [Google Scholar] [CrossRef]
- Calvet, J.C.; Fritz, N.; Froissard, F.; Suquia, D.; Petitpa, A.; Piguet, B. In situ soil moisture observations for the CAL/VAL of SMOS: The SMOSMANIA network. In Proceedings of the IGARSS 2007 Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–27 July 2007; pp. 1196–1199. [Google Scholar]
- Bircher, S.; Skou, N.; Jensen, K.H.; Walker, J.P.; Rasmussen, L. A soil moisture and temperature network for SMOS validation in Western Denmark. Hydrol. Earth Syst. Sci. 2012, 16, 1445–1463. [Google Scholar] [CrossRef] [Green Version]
- Morbidelli, R.; Saltalippi, C.; Flammini, A.; Rossi, E.; Corradini, C. Soil water content vertical profiles under natural conditions: Matching of experiments and simulations by a conceptual model. Hydrol. Process. 2014, 28, 4732–4742. [Google Scholar] [CrossRef]
- Schaefer, G.; Cosh, M.; Jackson, T. The USDA natural resources conservation service soil climate analysis network (SCAN). J. Atmos. Ocean. Technol. 2007, 24, 2073–2077. [Google Scholar] [CrossRef]
- Leavesley, G.; David, O.; Garen, D.; Lea, J.; Marron, J.; Pagano, T.; Perkins, T.; Strobel, M. A modeling framework for improved agricultural water supply forecasting. In Proceedings of the AGU Fall Meeting Abstracts, San Francisco, CA, USA, 15–19 December 2008; Volume 1, p. 0497. [Google Scholar]
- Bell, J.; Palecki, M.; Baker, C.; Collins, W.; Lawrimore, J.; Leeper, R.; Hall, M.; Kochendorfer, J.; Meyers, T.; Wilson, T.; et al. U.S. Climate Reference Network soil moisture and temperature observations. J. Hydrometeorol. 2013, 14, 977–988. [Google Scholar] [CrossRef]
- Larson, K.M.; Small, E.E.; Gutmann, E.D.; Bilich, A.L.; Braun, J.J.; Zavorotny, V.U. Use of GPS receivers as a soil moisture network for water cycle studies. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef] [Green Version]
- Yang, K.; Qin, J.; Zhao, L.; Chen, Y.; Tang, W.; Han, M.; Chen, Z.; Lv, N.; Ding, B.; Wu, H.; et al. A multiscale soil moisture and freeze–thaw monitoring network on the third pole. Bull. Am. Meteorol. Soc. 2013, 94, 1907–1916. [Google Scholar] [CrossRef]
- Moré, J.J. The Levenberg-Marquardt algorithm: Implementation and theory. In Numerical Analysis; Springer: Berlin/Heidelberg, Germany, 1978; pp. 105–116. [Google Scholar] [Green Version]
- Noilhan, J.; Mahfouf, J.F. The ISBA land surface parameterisation scheme. Glob. Planet Chang. 1996, 14, 145–159. [Google Scholar] [CrossRef]
- De Lannoy, G.J.M.; de Rosnay, P.; Reichle, R. Soil Moisture Data Assimilation; Springer: New York, NY, USA, 2016. [Google Scholar]
- Muñoz-Sabater, J.; de Rosnay, P.; Albergel, C.; Isaksen, L. Sensitivity of soil moisture analyses to contrasting background and observation error scenarios. Water 2018, 10, 890. [Google Scholar] [CrossRef]
- Lievens, H.; Martens, B.; Verhoest, N.; Hahn, S.; Reichle, R.; Miralles, D. Assimilation of global radar backscatter and radiometer brightness temperature observations to improve soil moisture and land evaporation estimates. Remote Sens. Environ. 2017, 189, 194–210. [Google Scholar] [CrossRef]
- Kolassa, J.; Reichle, R.H.; Liu, Q.; Cosh, M.; Bosch, D.D.; Caldwell, T.G.; Colliander, A.; Holifield Collins, C.; Jackson, T.J.; Livingston, S.J.; et al. Data assimilation to extract soil moisture information from SMAP observations. Remote Sens. 2017, 9, 1179. [Google Scholar] [CrossRef]
- Gevaert, A.I.; Renzullo, L.J.; Van Dijk, A.I.; Woerd, H.J.; Weerts, A.H.; De Jeu, R.A. Joint assimilation of soil moisture retrieved from multiple passive microwave frequencies increases robustness of soil moisture state estimation. Hydrol. Earth Syst. Sci. 2018, 22, 4605–4619. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network | Depth (m) | Sensors | N | Location | Reference |
|---|---|---|---|---|---|
| DAHRA | 0.05–0.05 | 1 | 1137 | Senegal | [45] |
| REMEDHUS | 0.00–0.05 | 23 | 1016 | Spain | [46] |
| SMOSMANIA | 0.05–0.05 | 19 | 1009 | France | [47] |
| HOBE | 0.00–0.05 | 46 | 687 | Denmark | [48] |
| PERUGIA | 0.05–0.05 | 2 | 719 | Italy | [49] |
| FMI | 0.05–0.05 | 8 | 245 | Finland | ... |
| SCAN | 0.05–0.05 | 240 | 816 | USA | [50] |
| SNOTEL | 0.05–0.05 | 347 | 537 | USA | [51] |
| USCRN | 0.05–0.05 | 122 | 931 | USA | [52] |
| ARM | 0.05–0.05 | 31 | 717 | USA | ... |
| PBO-H2O | 0.00–0.05 | 101 | 206 | USA | [53] |
| CTP-SMTMN | 0.00–0.05 | 33 | 365 | China | [54] |
| IFS-LDAS | so-LDAS | |
|---|---|---|
| Assimilation technique | SEKF | SEKF |
| Assimilation window | 12 h | 24 h |
| Surface-atmosphere coupling | fully coupled | uncoupled, surface forced by ERA-Interim |
| Observation input grid | Independent of the model grid | Same grid as the model grid |
| Analysis | RH2m, T2m, SM, soil temperature, snow cover and snow temperature | SM |
| Observation input | RH2m, T2m, ASCAT SM, LST, snow cover and snow temperature, SMOS TBs (in development) | RH2m and T2m analysed with IFS-LDAS, ASCAT SM, SMOS SM |
| Increment applied | analysis time | Initial time step and additional trajectory |
| Background error | 0.01 mm | 5% of water holding capacity |
| Label | SM | SLV | |
|---|---|---|---|
| OL | no | ... | no |
| NNSM | yes | no | |
| NNSM-SLV | yes | yes | |
| NNSM | yes | no | |
| SLV* | yes | yes |
| DAHRA | PERUGIA | |||||
|---|---|---|---|---|---|---|
| STDD | R | Bias | STDD | R | Bias | |
| NNSM | 0.048 | 0.71 | 0.112 | 0.057 | 0.79 | 0.079 |
| NNSM-SLV | 0.050 | 0.72 | 0.115 | 0.057 | 0.79 | 0.075 |
| SLV* | 0.054 | 0.72 | 0.118 | 0.057 | 0.79 | 0.075 |
| OL | 0.053 | 0.72 | 0.117 | 0.057 | 0.79 | 0.079 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez-Fernández, N.; de Rosnay, P.; Albergel, C.; Richaume, P.; Aires, F.; Prigent, C.; Kerr, Y. SMOS Neural Network Soil Moisture Data Assimilation in a Land Surface Model and Atmospheric Impact. Remote Sens. 2019, 11, 1334. https://doi.org/10.3390/rs11111334
Rodríguez-Fernández N, de Rosnay P, Albergel C, Richaume P, Aires F, Prigent C, Kerr Y. SMOS Neural Network Soil Moisture Data Assimilation in a Land Surface Model and Atmospheric Impact. Remote Sensing. 2019; 11(11):1334. https://doi.org/10.3390/rs11111334
Chicago/Turabian StyleRodríguez-Fernández, Nemesio, Patricia de Rosnay, Clement Albergel, Philippe Richaume, Filipe Aires, Catherine Prigent, and Yann Kerr. 2019. "SMOS Neural Network Soil Moisture Data Assimilation in a Land Surface Model and Atmospheric Impact" Remote Sensing 11, no. 11: 1334. https://doi.org/10.3390/rs11111334