Monitoring Automotive Particulate Matter Emissions with LiDAR: A Review



Abstract
:
1. Introduction and Background
1.1. Vehicle Emissions
1.2. Measurement Challenges
1.3. Vehicle Emission Remote Sensing Systems
2. Fuel-Based Pollutant Emission Factors Calculation
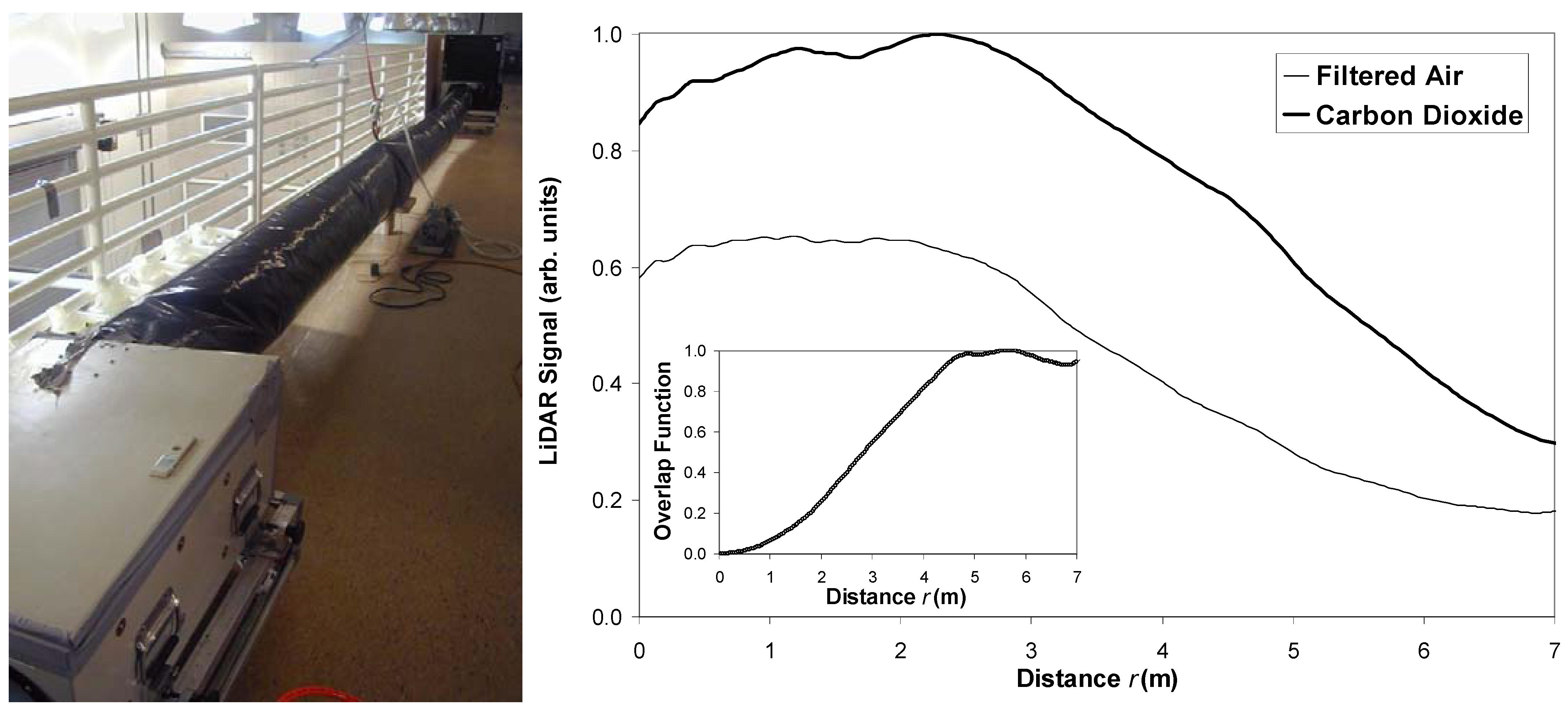
3. UV LiDAR and Transmissometer System for Vehicle PM Emission Measurements
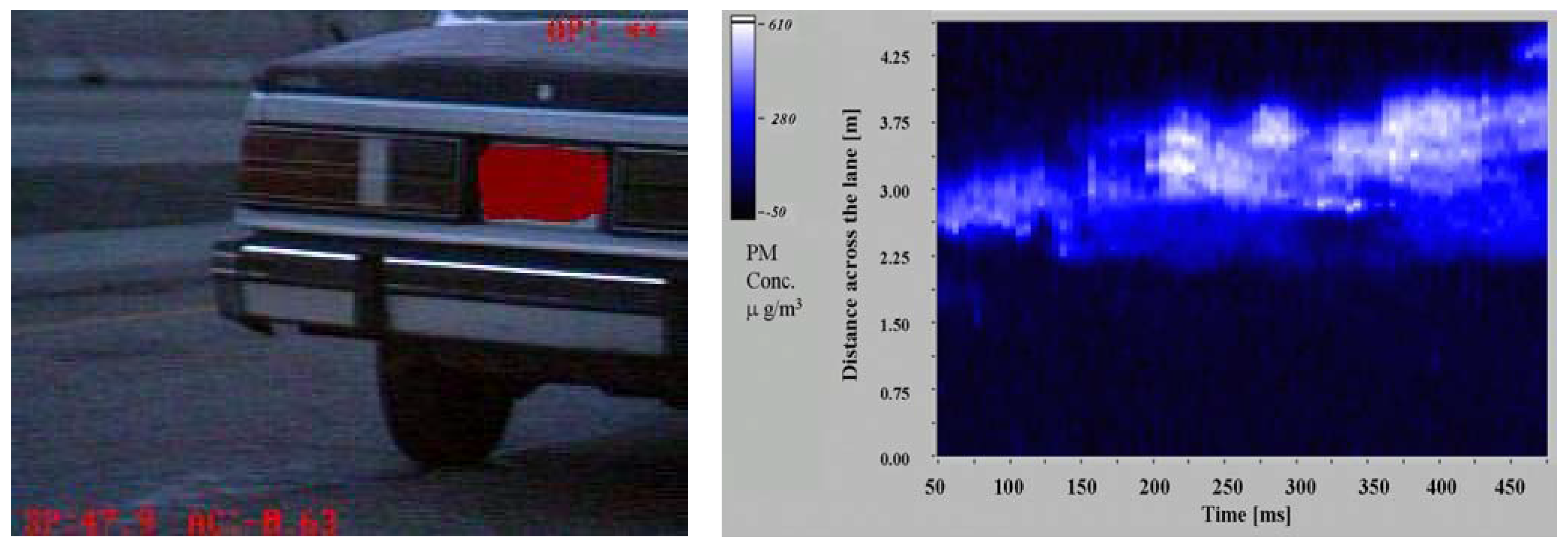
3.1. Measurement Approach and Instrument Design
3.1.1. State of the Art
3.1.2. UV LiDAR and Transmissometer Unit


3.1.3. Method



3.2. Backscattering and Extinction Mass Efficiencies: Theoretical Approach
3.2.1. Particulate Matter Extinction Mass Efficiency
3.2.2. Particulate Matter Backscattering Mass Efficiency
3.2.3. Applications to Vehicle Emitted Particulate

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Eext (m2g−1) | Ebscat (m2g−1sr−1) | LR = Eext/Ebscat (sr) | |
|---|---|---|---|
| Spark-ignition | 10 | 0.16 | 63 |
| Diesel | 13 | 0.08 | 163 |
3.2.4 Mass Efficiency Sensitivity Study
| m | Dgm | σg | Ebscat | Eext |
|---|---|---|---|---|
| 1.45 | 0.15 | 1.5 | 0.13 (−19%) | 8.1 (−19%) |
| 1.5 | 0.15 | 1.5 | 0.16 | 10 |
| 1.55 | 0.15 | 1.5 | 0.20 (+25%) | 12 (+20%) |
| 1.5-i0.05 | 0.15 | 1.5 | 0.11 (−31%) | 11 (+10%) |
| 1.5 | 0.125 | 1.5 | 0.16 (0%) | 7.8 (−22%) |
| 1.5 | 0.175 | 1.5 | 0.18 (+12%) | 11 (+10%) |
| 1.5 | 0.15 | 1.25 | 0.13 (−19%) | 10 (0%) |
| 1.5 | 0.15 | 1.75 | 0.18 (+12%) | 9.2 (−8%) |
- Values used for the emission factor calculations are shown in bold
- m = index of refraction
- Dgm = mass median diameter
- σg = geometric standard deviation
| m (core, shell) | Fractional core:shell volume | Dgm | σg | Ebscat | Eext |
|---|---|---|---|---|---|
| (1.5-i0.5, 1.45) | 0.5:0.5 | 0.15 | 1.5 | 0.08 (0%) | 13 (0%) |
| (1.5-i0.5, 1.5) | 0.5:0.5 | 0.15 | 1.5 | 0.08 | 13 |
| (1.5-i0.5, 1.55) | 0.5:0.5 | 0.15 | 1.5 | 0.08 (0%) | 13 (0%) |
| (1.45-i0.5, 1.5) | 0.5:0.5 | 0.15 | 1.5 | 0.08 (0%) | 13 (0%) |
| (1.55-i0.5, 1.5) | 0.5:0.5 | 0.15 | 1.5 | 0.09 (+12%) | 14 (+8%) |
| (1.5-i0.5, 1.5) | 0.4:0.6 | 0.15 | 1.5 | 0.09 (+12%) | 12 (−8%) |
| (1.5-i0.5, 1.5) | 0.6:0.4 | 0.15 | 1.5 | 0.08 (0%) | 14 (+8%) |
| (1.5-i0.5, 1.5) | 0.5:0.5 | 0.125 | 1.5 | 0.11 (+38%) | 13 (0%) |
| (1.5-i0.5, 1.5) | 0.5:0.5 | 0.175 | 1.5 | 0.06 (−25%) | 13 (0%) |
| (1.5-i0.5, 1.5) | 0.5:0.5 | 0.15 | 1.25 | 0.06 (−25%) | 14 (+8%) |
| (1.5-i0.5, 1.5) | 0.5:0.5 | 0.125 | 1.75 | 0.09 (+12%) | 12 (−8%) |
- Values used for the emission factor calculations are shown in bold
- m = index of refraction
- Dgm = mass median diameter
- σg = geometric standard deviation
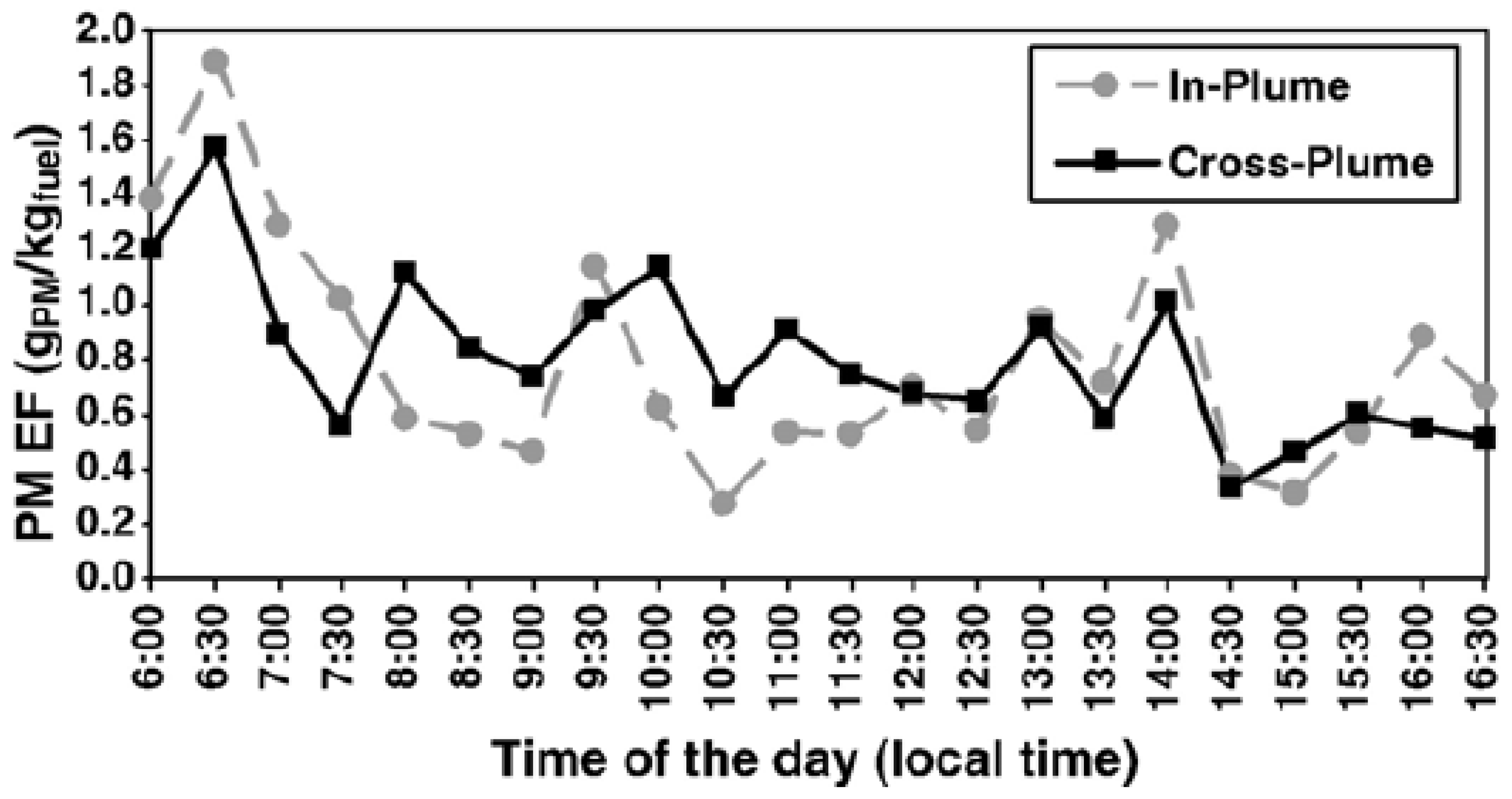
3.3. Calculation of Emission Factors from Backscattering and Extinction Measurements: An Example from the Field

3.4. Field LiDAR Validation

4. Results from Various Field Deployments
4.1. Las Vegas, Nevada 2000–2002: On-Ramp Freeway Vehicle Emissions
4.1.1. Campaign Objectives and Method
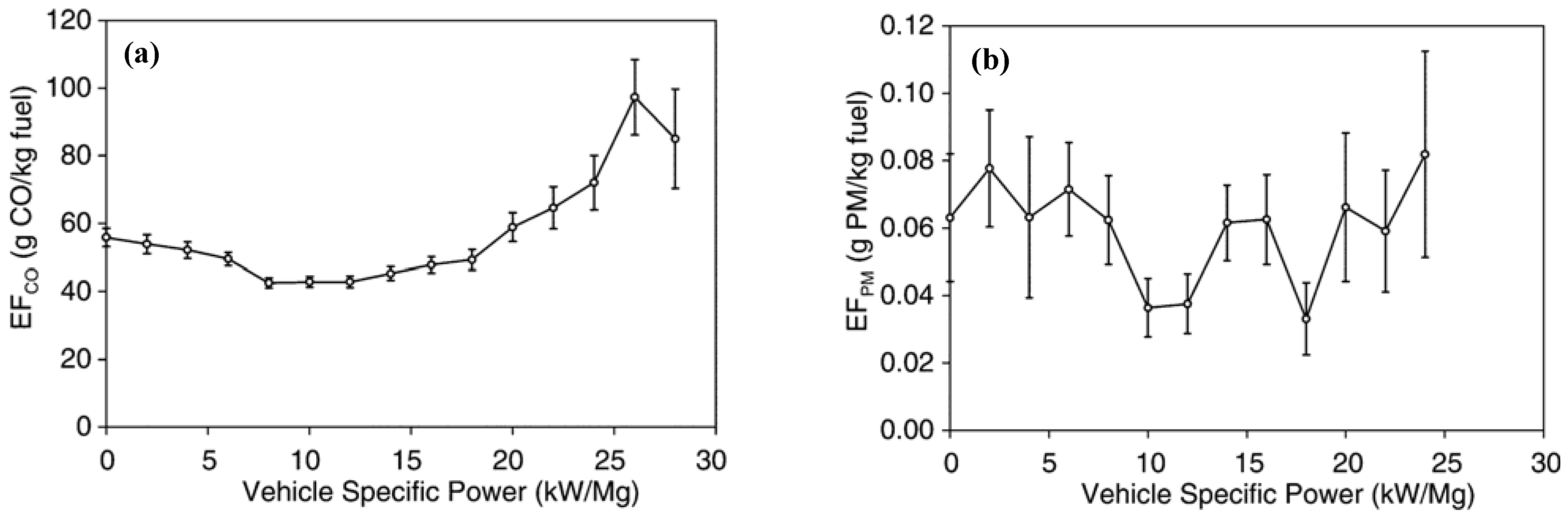
4.1.2. Emission Factors versus Vehicle Specific Power and Vehicle Age


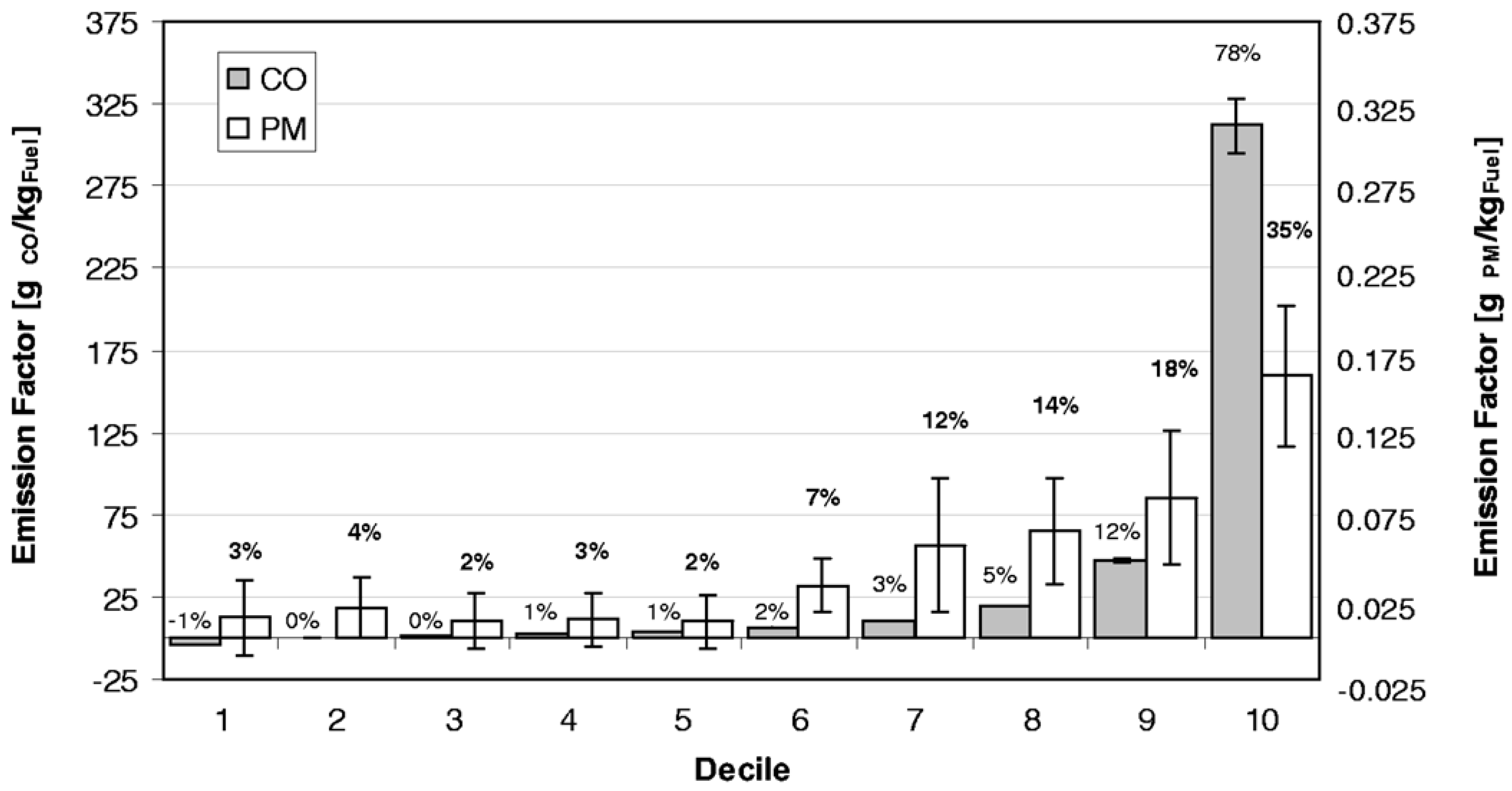
4.1.3. Particulate Matter Emission Statistics and Distribution Skewness
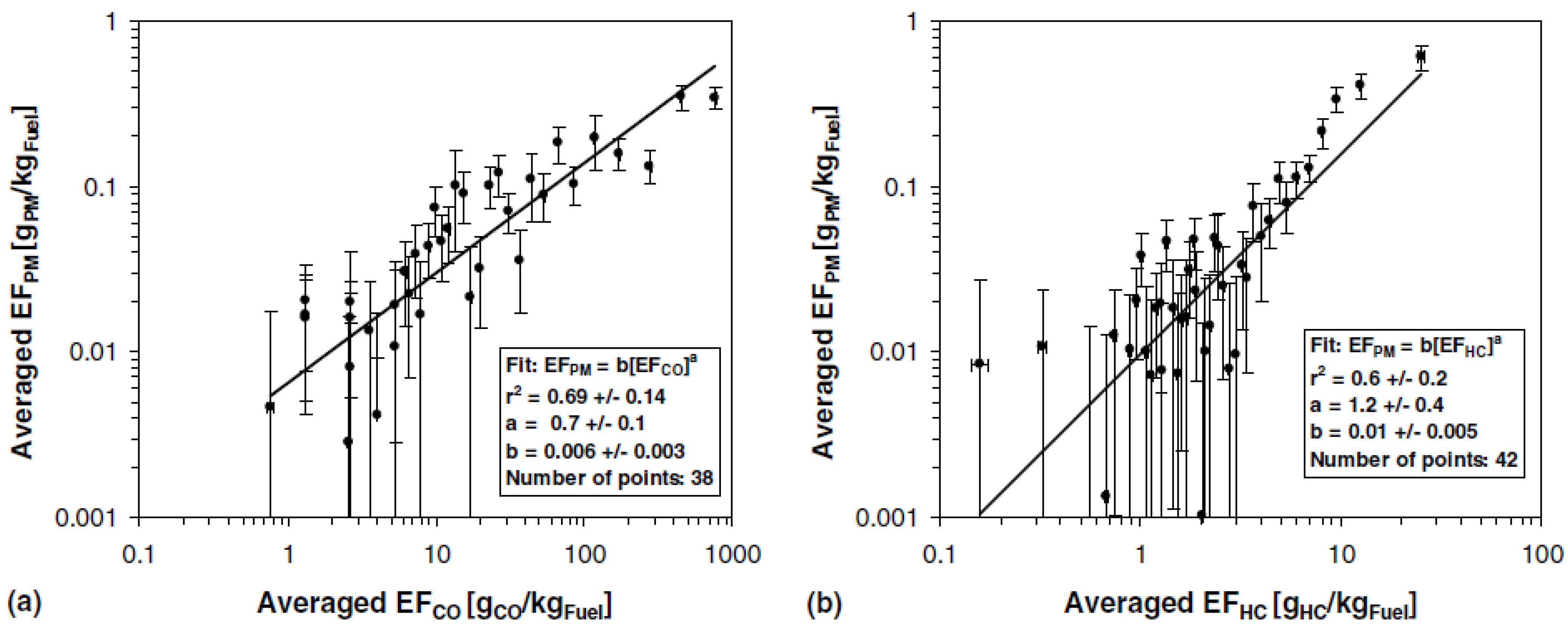
4.1.4. Correlation of Particulate Emission with Gaseous Emissions


| Number of Vehicles | Fraction of Measured Fleet | |
|---|---|---|
| Total number of vehicles | 13,786 | |
| No high emitters in any category | 9,975 | 72.36% |
| High emitters in one category | Total: 18.20% | |
| CO | 556 | 4.03% |
| HC | 326 | 2.36% |
| NO | 812 | 5.89% |
| PM | 816 | 5.92% |
| High emitters in two categories | Total: 6.84% | |
| CO & HC | 436 | 3.16% |
| CO & NO | 49 | 0.36% |
| CO & PM | 56 | 0.41% |
| HC & NO | 194 | 1.41% |
| HC & PM | 70 | 0.51% |
| NO & PM | 137 | 0.99% |
| High emitters in three categories | Total: 2.35% | |
| CO & HC & NO | 62 | 0.45% |
| CO & HC & PM | 174 | 1.26% |
| CO & NO & PM | 9 | 0.07% |
| HC & NO & PM | 79 | 0.57% |
| High emitters in all four categories | 38 | 0.28% |
4.2. Meridian, Idaho 2004: School-Busses Emissions, Petroleum- versus Bio-Diesel
4.2.1. Measurements Description and Field Campaign Objectives
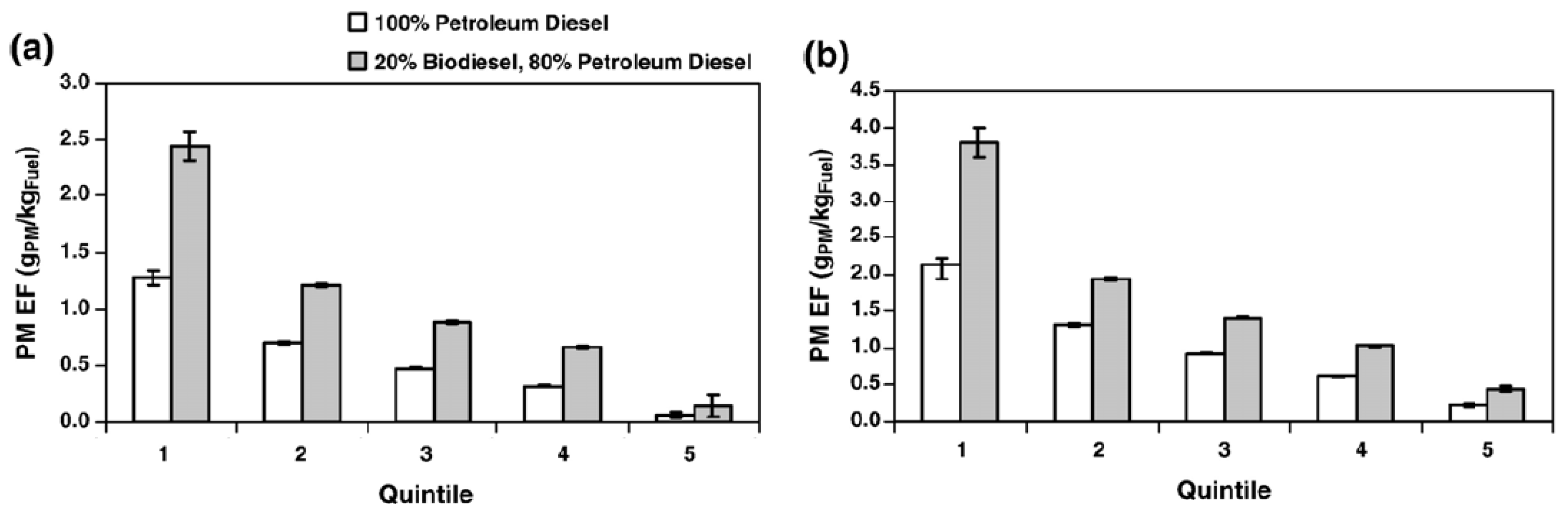
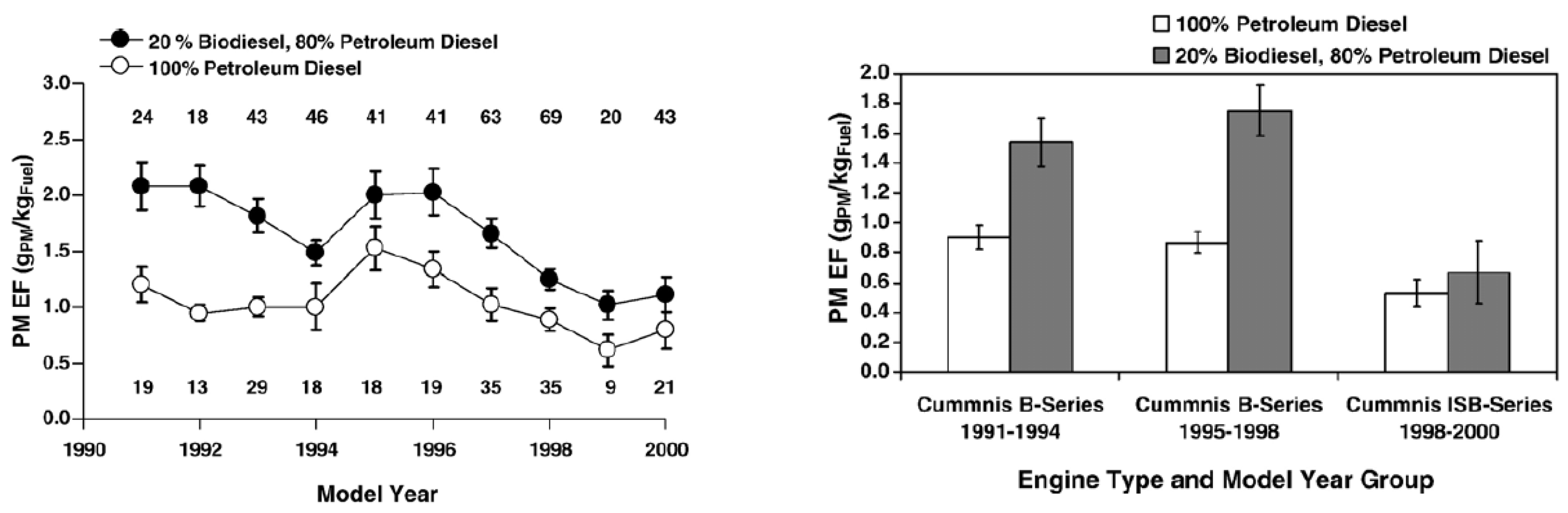
4.2.2. Buses and Passenger Vehicles Particulate Matter Emissions
| Average | Median | Number | |
|---|---|---|---|
| School Buses with Petroleum Diesel - hot engine | 0.57 ± 0.03 | 0.47 ± 0.03 | 241 |
| School Buses with Petroleum Diesel - cold engine | 1.05 ± 0.05 | 0.92 ± 0.05 | 234 |
| School Buses with B20 - hot engine | 1.07 ± 0.06 | 0.89 ± 0.03 | 291 |
| School Buses with B20 - cold engine | 1.73 ± 0.07 | 1.41 ± 0.04 | 494 |
| Control Buses Phase I – cold engine† | 1.62 ± 0.45 | - | 5 |
| Control Buses Phase II – cold engine† | 1.76 ± 0.38 | - | 11 |
| Passenger Vehicles Phase I - hot engine | 0.22 ± 0.03 | 0.16 ± 0.02 | 124 |
| Passenger Vehicles Phase I - cold engine | 0.34 ± 0.04 | 0.16 ± 0.02 | 264 |
| Passenger Vehicles Phase II - hot engine | 0.18 ± 0.04 | 0.06 ± 0.01 | 354 |
| Passenger Vehicles Phase II - cold engine | 0.43 ± 0.04 | 0.19 ± 0.02 | 483 |


5. Conclusions
Acknowledgements
References and Notes
- Pope, C.A.; Dockery, D.W. Health effects of fine particulate air pollution: Lines that connect. J. Air Waste Manage. Assoc. 2006, 56, 709–742. [Google Scholar] [CrossRef]
- Solomon, S.; Qin, D.; Manning, M.; Chen, Z.; Marquis, M.; Averyt, K.B.; Tignor, M.; Miller, H.L. Climate Change 2007: The Physical Science Basis; IPCC Secretariat: Geneva, Switzerland, 2007. [Google Scholar]
- Watson, J.G. 2002 critical review—Visibility: science and regulation. J. Air Waste Manage. Assoc. 2002, 52, 628–713. [Google Scholar] [CrossRef]
- Matsui, T.; Beltrán-Przekurat, A.; Niyogi, D.; Pielke, R.A., Sr.; Coughenour, M. Aerosol light scattering effect on terrestrial plant productivity and energy fluxes over the eastern United States. J. Geophys. Res. 2008, 113. [Google Scholar] [CrossRef]
- Bonazza, A.; Brimblecom, P.; Grossi, C.M.; Sabbioni, C. Carbon in black crusts from the tower of London. Environ. Sci. Technol. 2007, 41, 4199–4204. [Google Scholar] [CrossRef] [PubMed]
- Hansen, J.; Sato, M.; Ruedy, R.; Lacis, A.; Oinas, V. Global warming in the twenty-first century: An alternative scenario. Proc. Nat. Acad. Sci. USA 2000, 97, 9875–9880. [Google Scholar] [CrossRef] [PubMed]
- Chazette, P.; Liousse, C. A case study of optical and chemical ground apportionment for urban aerosols in Thessaloniki. Atmos. Environ. 2001, 35, 2497–2506. [Google Scholar] [CrossRef]
- Moosmüller, H.; Chakrabarty, R.K.; Arnott, W.P. Aerosol light absorption and its measurement: A review. J. Quant. Spectrosc. Radiat. 2009, 110, 844–878. [Google Scholar] [CrossRef]
- Moosmüller, H.; Arnott, W.P. Particle optics in the Rayleigh Regime. J. Air Waste Manage. Assoc. 2009, 59, 1028–1031. [Google Scholar] [CrossRef]
- Bond, T.; Bergstrom, R. Light absorption by carbonaceous particles: An investigative review. Aerosol Sci. Tech. 2006, 40, 27–67. [Google Scholar] [CrossRef]
- Moosmüller, H.; Mazzoleni, C.; Barber, P.W.; Kuhns, H.D.; Keislar, R.E.; Watson, J.G. On-road measurement of automotive particle emissions by ultraviolet lidar and transmissometer: Instrument. Environ. Sci. Technol. 2003, 37, 4971–4978. [Google Scholar] [CrossRef] [PubMed]
- Barber, P.W.; Moosmüller, H.; Keislar, R.E.; Kuhns, H.D.; Mazzoleni, C.; Watson, J.G. On-road measurement of automotive particle emissions by ultraviolet Lidar and transmissometer: Theory. Meas. Sci. Technol. 2004, 15, 2295–2302. [Google Scholar] [CrossRef]
- Mazzoleni, C.; Kuhns, H.D.; Moosmüller, H.; Witt, J.; Nussbaum, N.J.; Chang, M.C.O.; Parthasarathy, G.; Nathagoundenpalayam, S.K.K.; Nikolich, G.; Watson, J.G. A case study of real-world tailpipe emissions for school buses using a 20% biodiesel blend. Sci. Total Envir. 2007, 385, 146–159. [Google Scholar] [CrossRef] [PubMed]
- Mazzoleni, C.; Kuhns, H.D.; Moosmüller, H.; Keislar, R.E.; Barber, P.W.; Robinson, N.F.; Watson, J.G. On-road vehicle particulate matter and gaseous emission distributions in Las Vegas, Nevada, compared with other areas. J. Air Waste Manage. Assoc. 2004, 54, 711–726. [Google Scholar] [CrossRef]
- Mazzoleni, C.; Moosmüller, H.; Kuhns, H.D.; Keislar, R.E.; Barber, P.W.; Nikolic, D.; Nussbaum, N.J.; Watson, J.G. Correlation between automotive CO, HC, NO, and PM emission factors from on-road remote sensing: implications for inspection and maintenance programs. Transp. Res. PT D-Transp. Enviro. 2004, 9, 477–496. [Google Scholar] [CrossRef]
- Mazzoleni, C.; Kuhns, H.D.; Moosmüller, H. Pollution reduction using biofuels: from the laboratory to the real world. In New Research on Biofuels; Wright, J.H., Evans, D.A., Eds.; Nova: New York, NY, USA, 2008; pp. 117–121. [Google Scholar]
- Kuhns, H.D.; Mazzoleni, C.; Moosmüller, H.; Nikolic, D.; Keislar, R.E.; Barber, P.W.; Li, Z.; Etyemezian, V.; Watson, J.G. Remote sensing of PM, NO, CO, and HC emission factors for on-road gasoline and diesel engine vehicles in Las Vegas, NV. Sci. Total Envir. 2004, 322, 123–137. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Collins, J.F.; Durbin, T.D.; Huai, T.; Ayala, A.; Full, G.; Mazzoleni, C.; Nussbaum, N.J.; Obrist, D.; Zhu, D.; Kuhns, H.D.; Moosmüller, H. Detection of gasoline vehicles with gross PM emissions. SAE Technical Paper Series 2007, SP-2089. 2007-2001-1113. [Google Scholar]
- Hansen, A.D.A.; Rosen, H. Individual measurements of the emission factor of aerosol black carbon in automobile plumes. J. Air Waste Manage. Assoc. 1990, 40, 1654–1657. [Google Scholar] [CrossRef]
- Zhang, Y.; Bishop, G.A.; Stedman, D.H. Automobile emissions are statistically γ-distributed. Environ. Sci. Technol. 1994, 28, 1370–1374. [Google Scholar] [CrossRef] [PubMed]
- Pierson, W.R.; Gertler, A.W.; Robinson, N.F.; Sagebiel, J.C.; Zielinska, B.; Bishop, G.A.; Stedman, D.H.; Zweidinger, R.B.; Ray, W.D. Real-world automotive emissions—Summary of studies in the Fort McHenry and Tuscarora Mountain Tunnels. Atmos. Environ. 1996, 30, 2233–2256. [Google Scholar] [CrossRef]
- Gillies, J.A.; Gertler, A.W.; Sagebiel, J.C.; Dippel, W.A. On-road particulate matter (PM2.5 and PM10) emissions in the Sepulveda Tunnel, Los Angeles, California. Environ. Sci. Technol. 2001, 35, 1054–1063. [Google Scholar] [CrossRef] [PubMed]
- Canagaratna, M.R.; Jayne, J.T.; Ghertner, D.A.; Herndon, S.; Shi, Q.; Jimenez, J.L.; Silva, P.J.; Williams, P.; Lanni, T.; Drewnick, F.; Demerjian, K.L.; Kolb, C.E.; Worsnop, D.R. Chase studies of particulate emissions from in-use New York City vehicles. Aerosol Sci. Technol. 2004, 38, 555–573. [Google Scholar] [CrossRef]
- Johnson, J.P.; Kittelson, D.B.; Watts, W.F. Source apportionment of diesel and spark ignition exhaust aerosol using on-road data from the Minneapolis metropolitan area. Atmos. Environ. 2005, 39, 2111–2121. [Google Scholar] [CrossRef]
- Frey, H.C.; Unal, A.; Rouphail, N.M.; Colyar, J.D. On-road measurement of vehicle tailpipe emissions using a portable instrument. J. Air Waste Manage. Assoc. 2003, 53, 992–1002. [Google Scholar] [CrossRef]
- Huai, T.; Shah, S.D.; Miller, J.W.; Younglove, T.; Chernich, D.J.; Ayala, A. Analysis of heavy-duty diesel truck activity and emissions data. Atmos. Environ. 2006, 40, 2333–2344. [Google Scholar] [CrossRef]
- Bishop, G.A.; Stedman, D.H. A decade of on-road emissions measurements. Environ. Sci. Technol. 2008, 42, 1651–1656. [Google Scholar] [CrossRef] [PubMed]
- Stephens, R.D.; Cadle, S.H.; Qian, T.Z. Analysis of remote sensing errors of omission and commission under FTP conditions. J. Air Waste Manage. Assoc. 1996, 46, 510–516. [Google Scholar] [CrossRef]
- Bishop, G.A.; Zhang, Y.; McLaren, S.E.; Guenther, P.L.; Beaton, S.P.; Peterson, J.E.; Stedman, D.H.; Pierson, W.R.; Knapp, K.T.; Zweidinger, R.B.; Duncan, J.W.; McArver, A.Q.; Groblicki, P.J.; Day, F.J. Enhancements of remote sensing for vehicle emissions in tunnels. J. Air Waste Manage. Assoc. 1994, 44, 169–175. [Google Scholar] [CrossRef]
- Knapp, K.T. On-road vehicle emissions: US studies. Sci. Total Environ. 1994, 146-147, 209–215. [Google Scholar] [CrossRef]
- Bishop, G.A.; McLaren, S.E.; Stedman, D.H.; Pierson, W.R.; Zweidinger, R.B.; Ray, W.D. Method comparisons of vehicle emissions measurements in the Fort McHenry and Tuscarora Mountain Tunnels. Atmos. Environ. 1996, 30, 2307–2316. [Google Scholar] [CrossRef]
- Bishop, G.A.; Starkey, J.R.; Ihlenfeldt, A.; Williams, W.J.; Stedman, D.H. IR long-path photometry: A remote-sensing tool for automobile emissions. Anal. Chem. 1989, 61, 671A–677A. [Google Scholar] [CrossRef] [PubMed]
- Stedman, D.H. Automobile carbon monoxide emissions. Environ. Sci. Technol. 1989, 23, 147–149. [Google Scholar] [CrossRef]
- Lawson, D.R.; Groblicki, P.J.; Stedman, D.H.; Bishop, G.A.; Guenther, P.L. Emissions from in-use motor vehicles in Los Angeles: A pilot study of remote sensing and the inspection and maintenance program. J. Air Waste Manage. Assoc. 1990, 40, 1096–1105. [Google Scholar] [CrossRef]
- Cadle, S.H.; Stephens, R.D. Remote sensing of vehicle exhaust emissions. Environ. Sci. Technol. 1994, 28, 258A–264A. [Google Scholar] [CrossRef]
- Guenther, P.L.; Stedman, D.H.; Bishop, G.A.; Beaton, S.P.; Bean, J.H.; Quine, R.W. A hydrocarbon detector for the remote sensing of vehicle exhaust emissions. Rev. Sc. Instr. 1995, 66, 3024–3029. [Google Scholar] [CrossRef]
- Stephens, R.D.; Mulawa, P.A.; Giles, M.T.; Kennedy, K.G.; Groblicki, P.J.; Cadle, S.H. An experimental evaluation of remote sensing-based hydrocarbon measurements: A comparison to FID measurements. J. Air Waste Manage. Assoc. 1996, 46, 148–158. [Google Scholar] [CrossRef]
- Walsh, P.A.; Sagebiel, J.C.; Lawson, D.R.; Knapp, K.T.; Bishop, G.A. Comparison of auto emission measurement techniques. Sci. Total Envir. 1996, 189-190, 175–180. [Google Scholar] [CrossRef]
- Zhang, Y.; Stedman, D.H.; Bishop, G.A.; Beaton, S.P.; Guenther, P.L. On-road evaluation of inspection/maintenance effectiveness. Environ. Sci. Technol. 1996, 30, 1445–1450. [Google Scholar] [CrossRef]
- Nelson, D.D.; Zahniser, M.S.; McManus, J.B.; Kolb, C.E.; Jimenez, J.L. A tunable diode laser system for the remote sensing of on-road vehicle emissions. Appl. Phys. B 1998, 67, 433–441. [Google Scholar] [CrossRef]
- Jiménez, J.L.; Koplow, M.D.; Nelson, D.D.; Zahniser, M.S.; Schmidt, S.E. Characterization of on-road vehicle NO emissions by a TILDAS remote sensor. J. Air Waste Manage. Assoc. 1999, 49, 463–470. [Google Scholar] [CrossRef]
- Popp, P.J.; Bishop, G.A.; Stedman, D.H. Development of a high-speed ultraviolet spectrometer for remote sensing of mobile source nitric oxide emissions. J. Air Waste Manage. Assoc. 1999, 49, 1463–1468. [Google Scholar] [CrossRef]
- Burgard, D.A.; Bishop, G.A.; Stedman, D.H. Remote sensing of ammonia and sulfur dioxide from on-road light duty vehicles. Environ. Sci. Technol. 2006, 40, 7018–7022. [Google Scholar] [CrossRef] [PubMed]
- Burgard, D.A.; Bishop, G.A.; Stedman, D.H.; Gessner, V.H.; Daeschlein, C. remote sensing of in-use heavy-duty diesel trucks. Environ. Sci. Technol. 2006, 40, 6938–6942. [Google Scholar] [CrossRef] [PubMed]
- Burgard, D.A.; Dalton, T.R.; Bishop, G.A.; Starkey, J.R.; Stedman, D.H. Nitrogen Dioxide, Sulfur Dioxide, and Ammonia Detector for remote sensing of vehicle emissions. Rev. Sc. Instr. 2006, 77, 014101. [Google Scholar] [CrossRef]
- Moosmüller, H.; Mazzoleni, C.; Barber, P.W.; Kuhns, H.D.; Keislar, R.E.; Watson, J.G. On-road measurement of automotive particle emissions by ultraviolet lidar and transmissometer: Instrument. Environ. Sci. Technol. 2003, 37, 4971–4978. [Google Scholar] [CrossRef] [PubMed]
- Chen, G.; Prochnau, T.J.; Hofeldt, D.L. Feasibility of remote sensing of particulate emissions from heavy-duty vehicles. SAE Technical Paper Series 1996, 960250, 14. [Google Scholar]
- Morris, J.A.; Bishop, G.A.; Stedman, D.H. On-Road Remote Sensing of Heavy-Duty Diesel Truck Emissions in the Austin-San Marcos Area; University of Denver: Denver, CO, USA, November 1998. [Google Scholar]
- Stedman, D.H.; Bishop, G.A. Opacity Enhancement of the On-Road Remote Sensor for HC, CO and NO; University of Denver: Denver, CO, USA, February 2002. [Google Scholar]
- Simpson, M.L.; Cheng, M.D.; Dam, T.Q.; Lenox, K.E.; Price, J.R.; Storey, J.M.; Wachter, E.A.; Fisher, W.G. Intensity-modulated, stepped frequency cw lidar for distributed aerosol and hard target measurements. Appl. Opt. 2005, 44, 7210–7217. [Google Scholar] [CrossRef] [PubMed]
- Koren, U.; Eichinger, W. Determination of road traffic emissions from lidar data. Advances in air pollution series in Air Pollution X; Brebbia, C.A., Martin-Duque, J.F., Eds.; WIT Press: Southampton, UK, 2002; Volume 11, pp. 103–110. [Google Scholar]
- Simeonov, V.; Larcheveque, G.; Quaglia, P.; van den Bergh, H.; Calpini, B. Influence of the photomultiplier tube spatial uniformity on lidar signals. Appl. Opt. 1999, 38, 5186–5190. [Google Scholar] [CrossRef] [PubMed]
- Measures, R.M. Laser Remote Sensing: Fundamentals and Applications; Krieger Publishing Company: Malabar, FL, USA, 1992; p. 524. [Google Scholar]
- Chazette, P.; Sanak, J.; Dulac, F. New approach for aerosol profiling with a Lidar onhoard an ultralight aircraft: Application to the African Monsoon Multidisciplinary Analysis. Environ. Sci. Technol. 2007, 41, 8335–8341. [Google Scholar] [CrossRef] [PubMed]
- Raut, J.C.; Chazette, P. Vertical profiles of urban aerosol complex refractive index in the frame of ESQUIF airborne measurements (vol 8, pg 901, 2008). Atmos. Chem. Phys. 2008, 8, 3865–3865. [Google Scholar] [CrossRef]
- Kunz, G.J. Transmission as an input boundary value for an analytical solution of a single-scatter lidar equation. Appl. Opt. 1996, 35, 3255–3260. [Google Scholar] [CrossRef] [PubMed]
- Hartman, D.H. Pulse mode saturation properties of photomultiplier tubes. Rev. Sc. Instr. 1978, 49, 1130–1133. [Google Scholar] [CrossRef] [PubMed]
- Bishop, G.A.; Stedman, D.H. Measuring the emissions of passing cars. Account. Chem. Res. 1996, 29, 489–495. [Google Scholar] [CrossRef]
- Lee, K.O.; Cole, R.; Sekar, R.; Choi, M.Y.; Kang, J.S.; Bae, C.S.; Shin, H.D. Morphological Investigation of the microstructure, dimensions, and fractal geometry of diesel particulates. Proc. Combust. Inst. 2002, 29, 647–653. [Google Scholar] [CrossRef]
- Chakrabarty, R.K.; Moosmüller, H.; Arnott, W.P.; Garro, M.A.; Walker, J.W. Structural and Fractal Properties of Particles Emitted from Spark Ignition Engines. Environ. Sci. Technol. 2006, 40, 6647–6654. [Google Scholar] [CrossRef] [PubMed]
- Huang, P.F.; Turpin, B.J.; Pipho, M.J.; Kittelson, D.B.; McMurry, P.H. Effects of water condensation and evaporation on diesel chain-agglomerate morphology. J. Aerosol Sci. 1994, 25, 447–459. [Google Scholar] [CrossRef]
- Lee, K.; Zhu, J. Effects of exhaust system components on particulate morphology in a light-duty diesel engine. SAE Trans. 2005, 114, 52–60. [Google Scholar]
- Shi, J.P.; Mark, D.; Harrison, R.M. Characterization of particles from a current technology heavy-duty diesel engine. Environ. Sci. Technol. 2000, 34, 748–755. [Google Scholar] [CrossRef]
- Virtanen, A.K.K.; Ristimaki, J.M.; Vaaraslahti, K.M.; Keskinen, J. Effect of engine load on diesel soot particles. Environ. Sci. Technol. 2004, 38, 2551–2556. [Google Scholar] [CrossRef] [PubMed]
- Rogers, C.F.; Sagebiel, J.C.; Zielinska, B.; Arnott, W.P.; Fujita, E.M.; McDonald, J.D.; Griffin, J.B.; Kelly, K.; Overacker, D.; Wagner, D.; Lighty, J.S.; Sarofim, A.; Palmer, G. Characterization of submicron exhaust particles from engines operating without load on diesel and JP-8 fuels. Aerosol Sci. Technol. 2003, 37, 355–368. [Google Scholar] [CrossRef]
- Shi, J.P.; Harrison, R.M.; Brear, F. Particle size distribution from a modern heavy duty diesel engine. Sci. Total Envir. 1999, 235, 305–317. [Google Scholar] [CrossRef]
- Robert, M.A.; Kleeman, M.J.; Jakober, C.A. Size and composition distributions of particulate matter emissions: Part 2- heavy-duty diesel vehicles. J. Air Waste Manage. Assoc. 2007, 57, 1429–1438. [Google Scholar] [CrossRef]
- Mathis, U.; Mohr, M.; Kaegi, R.; Bertola, A.; Boulouchos, K. Influence of diesel engine combustion parametes on primary soot particle diameter. Environ. Sci. Technol. 2005, 39, 1887–1892. [Google Scholar] [CrossRef] [PubMed]
- Maricq, M.M.; Podsiadlik, D.H.; Chase, R.E. Size distributions of motor vehicle exhaust PM: A comparison between ELPI and SMPS measurements. Aerosol Sci. Technol. 2000, 33, 239–260. [Google Scholar] [CrossRef]
- Lehmann, U.; Mohr, M.; Schweizer, T.; Rutter, J. Number size distribution of particulate emissions of heavy-duty engines in real world test cycles. Atmos. Environ. 2003, 37, 5247–5259. [Google Scholar] [CrossRef]
- Kleeman, M.J.; Schauer, J.J.; Cass, G.R. Size and composition distribution of fine particulate matter emitted from motor vehicles. Environ. Sci. Technol. 2000, 34, 1132–1142. [Google Scholar] [CrossRef]
- Huang, X.F.; Yu, J.Z.; He, L.Y.; Hu, M. Size distribution characteristics of elemental carbon emitted from Chinese vehicles: Results of a tunnel study and atmospheric implications. Environ. Sci. Technol. 2006, 40, 5355–5360. [Google Scholar] [CrossRef] [PubMed]
- Harris, S.J.; Maricq, M.M. Signature size distributions for diesel and gasoline engine exhaust particulate matter. J. Aerosol Sci. 2001, 32, 749–764. [Google Scholar] [CrossRef]
- Chakrabarty, R.K.; Moosmüller, H.; Garro, M.A.; Arnott, W.P.; Walker, J.; Susott, R.A.; Babbitt, R.E.; Wold, C.E.; Lincoln, E.N.; Hao, W.M. Emissions from the laboratory combustion of wildland fuels: particle morphology and size. J. Geophys. Res. 2006, 111, D07204. [Google Scholar] [CrossRef]
- Morawska, L.; Bofinger, N.D.; Kocis, L.; Nwankwoala, A. Submicrometer and supermicrometer particles from diesel vehicle emissions. Environ. Sci. Technol. 1998, 32, 2033–2042. [Google Scholar] [CrossRef]
- Ristovski, Z.D.; Morawska, L.; Bofinger, N.D.; Hitchins, J. Submicrometer and supermicrometer particulate emission from spark ignition vehicles. Environ. Sci. Technol. 1998, 32, 3845–3852. [Google Scholar] [CrossRef]
- Bond, C.T.; Bergstrom, W.R. Light absorption by carbonaceous particles: An investigative review. Aerosol Sci. Technol. 2006, 40, 27–67. [Google Scholar] [CrossRef]
- Wentzel, M.; Gorzawski, H.; Naumann, K.H.; Saathoff, H.; Weinbruch, S. Transmission electron microscopical and aerosol dynamical characterization of soot aerosols. J. Aerosol Sci. 2003, 34, 1347–1370. [Google Scholar] [CrossRef]
- Kittelson, D.B. Engines and nanoparticles: A review. J. Aerosol Sci. 1998, 29, 575–588. [Google Scholar] [CrossRef]
- Kuhns, H.; Etyemezian, V.; Landwehr, D.; MacDougall, C.; Pitchford, M.; Green, M. Testing re-entrained aerosol kinetic emissions from roads (TRAKER): A new approach to infer silt loading on roadways. Atmos. Environ. 2001, 35, 2815–2825. [Google Scholar] [CrossRef]
- Moosmüller, H.; Gillies, J.A.; Rogers, C.F.; DuBois, D.W.; Chow, J.C.; Watson, J.G.; Langston, R. Particulate emission rates for unpaved shoulders along a paved road. J. Air Waste Manage. Assoc. 1998, 48, 398–407. [Google Scholar] [CrossRef]
- Chazette, P.; Randriamiarisoa, H.; Sanak, J.; Couvert, P. Optical properties of urban aerosol from airborne and ground-based in situ measurements performed during the Etude et Simulation de la Qualite de l’air en Ile de France (ESQUIF) program. J. Geophys. Res. 2005, 110. [Google Scholar] [CrossRef]
- Kovalev, V.A.; Eichinger, W.E. Elastic Lidar: Theory, Practice, and Analysis Methods; Wiley & Sons, Inc.: Hoboken, NJ, USA, 2004; p. 615. [Google Scholar]
- Ackermann, J. The extinction-to-backscatter ratio of tropospheric aerosol: A numerical study. J. Atmos. Ocean. Technol. 1998, 15, 1043–1050. [Google Scholar] [CrossRef]
- Franke, K.; Ansmann, A.; Muller, D.; Althausen, D.; Wagner, A.; Scheele, R. One-year observations of particle lidar ratio over the tropical Indian Ocean with Raman lidar. Geophys. Res. Lett. 2001, 28, 4559–4562. [Google Scholar] [CrossRef]
- Andreae, M.O. A new look at aging aerosols. Science 2009, 326, 1493–1494. [Google Scholar] [CrossRef] [PubMed]
- Reagan, J.A.; Apte, M.V.; Bruhns, T.V.; Youngbluth, O. Lidar and balloon-borne cascade impactor measurements of aerosols—A case-study. Aerosol Sci. Technol. 1984, 3, 259–275. [Google Scholar] [CrossRef]
- Tegen, I.; Lacis, A.A. Modeling of particle size distribution and its influence on the radiative properties of mineral dust aerosol. J. Geophys. Res.-Atmospheres 1996, 101, 19237–19244. [Google Scholar] [CrossRef]
- Nussbaum, N.J.; Zhu, D.Z.; Kuhns, H.D.; Mazzoleni, C.; Chang, M.C.O.; Moosmüller, H.; Watson, J.G. The in-plume emission test stand: an instrument platform for the real-time characterization of fuel-based combustion emissions. J. Air Waste Manage. Assoc. 2009, 59, 1437–1445. [Google Scholar] [CrossRef]
- Zhu, D.Z.; Nussbaum, N.J.; Kuhns, H.D.; Chang, M.C.O.; Sodeman, D.; Uppapalli, S.; Moosmüller, H.; Chow, J.C.; Watson, J.G. In-Plume Emission Test Stand 2: Emission Factors for 10-to 100-kW US Military Generators. J. Air Waste Manage. Assoc. 2009, 59, 1446–1457. [Google Scholar] [CrossRef]
- Maricq, M.M.; Xu, N.; Chase, R.E. Measuring particulate mass emissions with the electrical low pressure impactor. Aerosol Sci. Technol. 2006, 40, 68–79. [Google Scholar] [CrossRef]
- EPA. MOBILE6 Technical Documentation Index. Available online: http://www.epa.gov/otaq/models/mobile6/m6tech.htm (accessed on 4 March 2010).
- Kuhns, H.D.; Mazzoleni, C.; Moosmüller, H.; Nikolic, D.; Keislar, R.E.; Barber, P.W.; Li, Z.; Etyemezian, V.; Watson, J.G. Remote sensing of PM, NO, CO and HC emission factors for on-road gasoline and diesel engine vehicles in Las Vegas, NV. Sci. Total Envir. 2004, 322, 123–137. [Google Scholar] [CrossRef] [PubMed]
- Pokharel, S.S.; Bishop, G.A.; Stedman, D.H. On-Road Remote Sensing of Automobile Emissions in the Phoenix Area: Year 2; Contract CRC-E-23-4; University of Denver: Denver, CO, USA, 2001. [Google Scholar]
- Mazzoleni, C.; Kuhns, H.D.; Moosmüller, H.; Keislar, R.E.; Barber, P.W.; Robinson, N.F.; Watson, J.G.; Nikolic, D. On-road vehicle particulate matter and gaseous emission distributions in Las Vegas, Nevada, compared with other areas. J. Air Waste Manage. Assoc. 2004, 54, 711–726. [Google Scholar] [CrossRef]
- Graboski, M.S.; McCormick, R.L. Combustion of fat and vegetable oil derived fuels in diesel engines. Prog. Energ. Combust. Sci. 1998, 24, 125–164. [Google Scholar] [CrossRef]
- Marshall, J.D.; Behrentz, E. Vehicle self-pollution intake fraction: Children’s exposure to school bus emissions. Environ. Sci. Technol. 2005, 39, 2559–2563. [Google Scholar] [CrossRef] [PubMed]
- EPA. A Comprehensive Analysis of Biodiesel Impacts on Exhaust Emissions; EPA420-P-02-001; Environmental Protection Agency: Ann Arbor, MI, USA, 2002. Available online: http://www.epa.gov/otaq/models/analysis/biodsl/p02001.pdf (accessed on 07 March 2010).
© 2010 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Mazzoleni, C.; Kuhns, H.D.; Moosmüller, H. Monitoring Automotive Particulate Matter Emissions with LiDAR: A Review. Remote Sens. 2010, 2, 1077-1119. https://doi.org/10.3390/rs2041077
Mazzoleni C, Kuhns HD, Moosmüller H. Monitoring Automotive Particulate Matter Emissions with LiDAR: A Review. Remote Sensing. 2010; 2(4):1077-1119. https://doi.org/10.3390/rs2041077
Chicago/Turabian StyleMazzoleni, Claudio, Hampden D. Kuhns, and Hans Moosmüller. 2010. "Monitoring Automotive Particulate Matter Emissions with LiDAR: A Review" Remote Sensing 2, no. 4: 1077-1119. https://doi.org/10.3390/rs2041077