A Novel Satellite Mission Concept for Upper Air Water Vapour, Aerosol and Cloud Observations Using Integrated Path Differential Absorption LiDAR Limb Sounding

Abstract
:
1. Introduction
2. Motivation and Background
2.1. The Importance of Upper Air Water Vapour, Clouds and Aerosols
2.2. Current Capabilities for Measuring Water Vapour, Clouds and Aerosols in the UTLS and above
2.3. Observational Requirements for a New Mission Concept
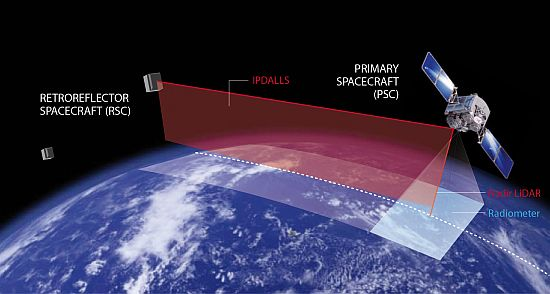
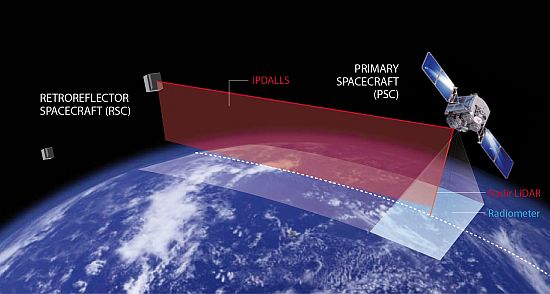
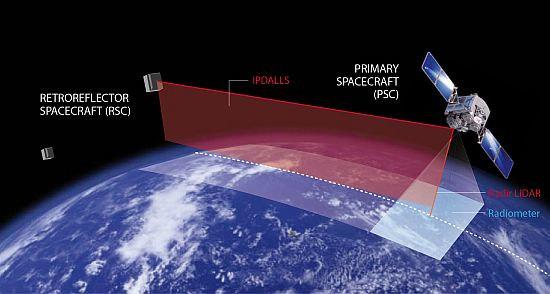
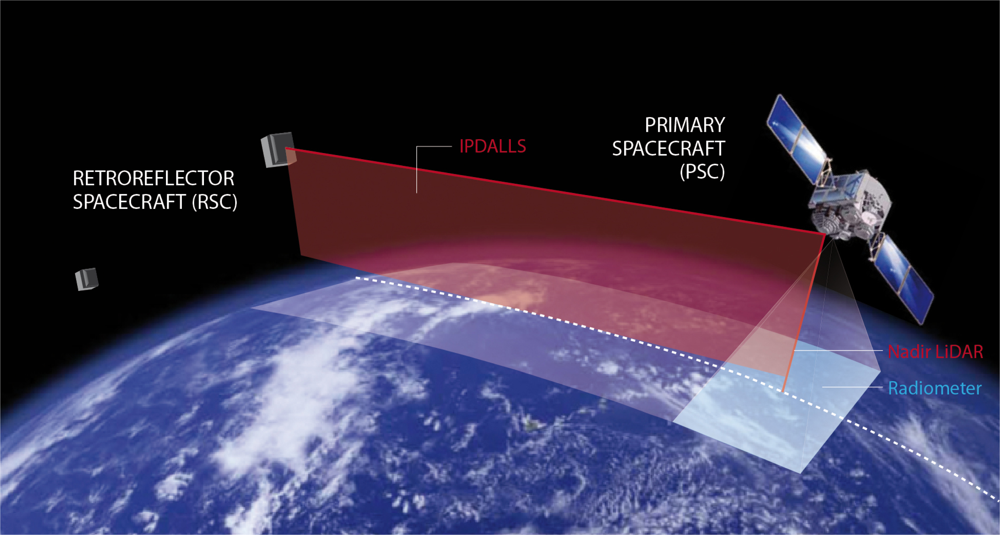
2.4. A New Measurement Technique in Space: Active Limb Sounding
3. Mission Overview
3.1. Instruments
3.2. Orbit Specification
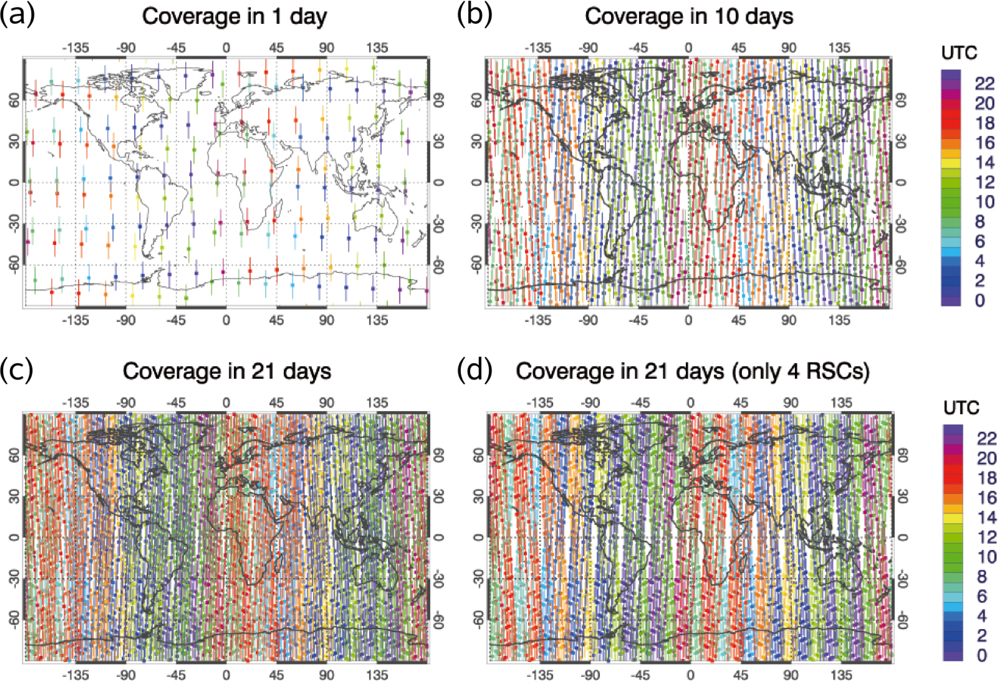
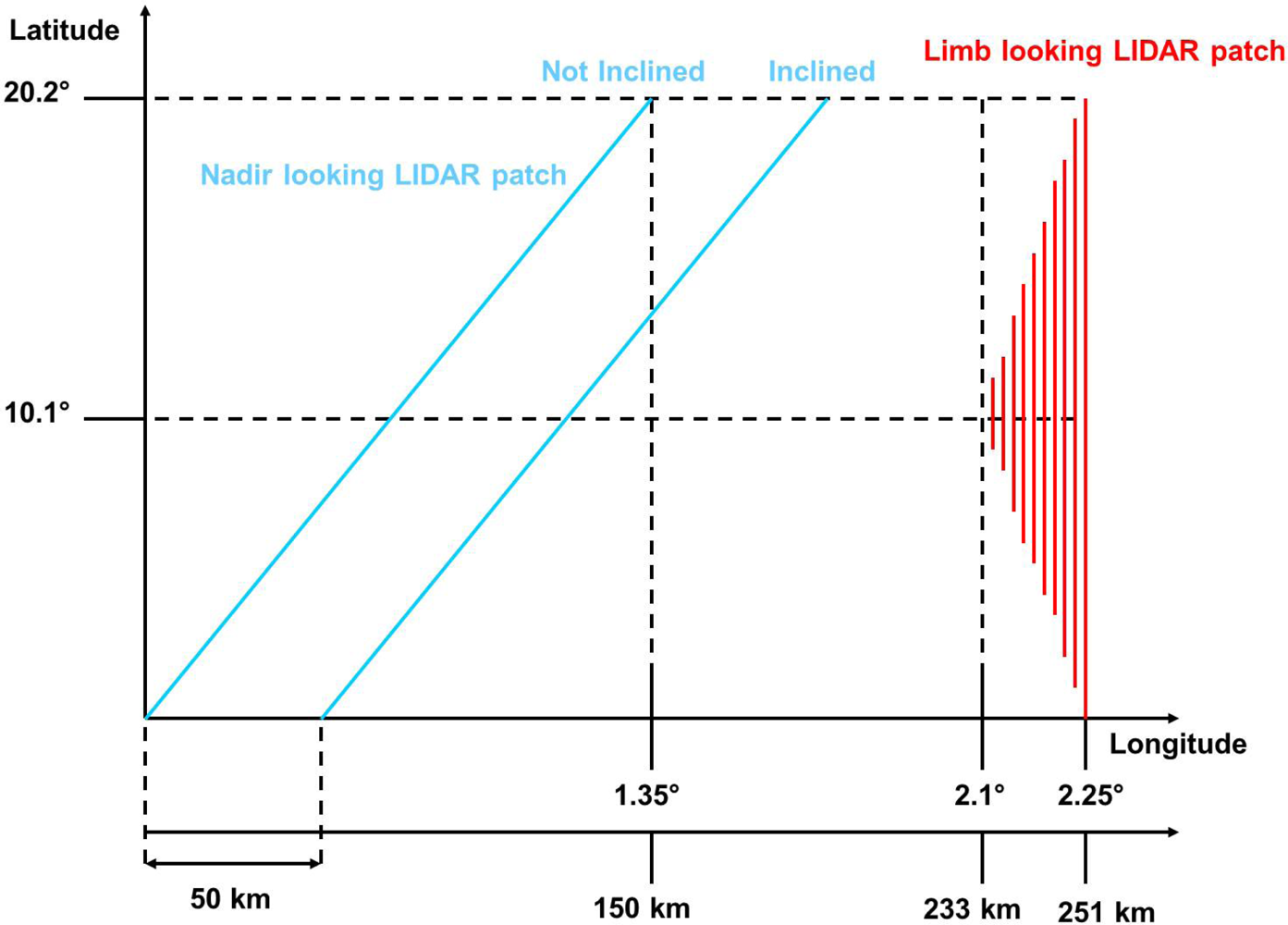
3.3. Measurement Sequence and Coverage
3.4. Data Retrieval and Use
4. Preliminary Performance Considerations for IPDALLS
4.1. First Order Estimation of the Link Budget and Measurement Accuracy
4.2. Potential Performance Limitations
5. Mission Technical Implementation
5.1. Payload Design: IPDALLS System and nadir LiDAR
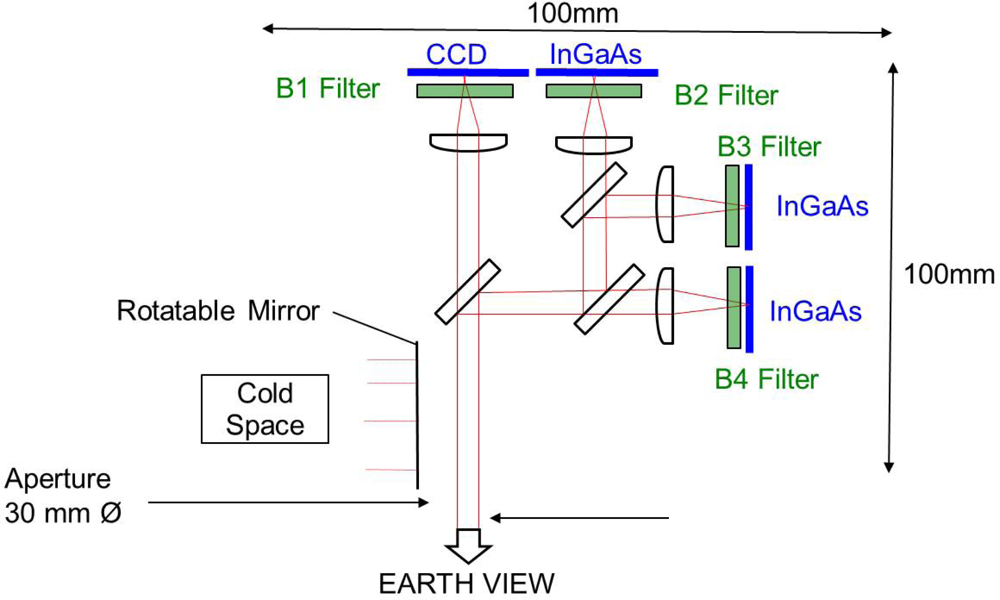
5.2. Payload Design: Radiometer
- The VIS/SWIR instrument, providing data from four spectral channels (VIS: 0.66 μm, SWIR: 1.24 μm, 1.38 μm and 1.66 μm).
- The MIR/TIR instrument, providing data from four spectral channels (MIR: 3.90 μm and 6.30 μm, TIR: 10.80 μm and 12 μm).
- A common optical bench module that interfaces with the platform. The bench is located outside the main platform structure, with the control unit inside.
- The instrument control unit that drives both the VIS/SWIR and the MIR/TIR instruments.
5.3. Spacecraft Design: Mass and Power Budgets
5.4. Spacecraft Tracking
5.5. Orbit Control and Launch Options
- Use of a dispenser to position the constellation, such as the one for SWARM [74]. The dispenser would distribute all the retroreflector spacecraft using its own propellant. This option offers an optimal mission lifetime but incurs the cost and design of a dispenser.
- Use of the two-tier layout in the fairing of Dnepr but no dispenser. In this option, three spacecraft would be placed on the first floor of the fairing, and two spacecraft on the second floor. The spacecraft would have to use their own propellant to achieve the correct distribution. This option shortens the mission lifetime but is cheaper as it does not incur the cost of a dispenser.
- The final option is a combination of the previous two. Two dispensers, one containing three spacecraft and another containing two spacecraft would be put on the two floors of Dnepr. The dispensers would then distribute the constellation. This option offers an optimal mission lifetime but incurs the cost of two dispensers. The advantage of using this configuration would be a reduced total amount of propellant for the dispensers and hence a potential cost saving for the mission. This option would offer an intermediate solution: same lifetime mission as option 1 but potentially cheaper, a longer mission lifetime than option 2 but more expensive.
6. Significant Challenges
7. Concluding Remarks
Acknowledgments
References
- Elliott, W.P. On detecting long-term changes in atmospheric moisture. Climatic Change 1995, 31, 349–367. [Google Scholar]
- Tost, H.; Jöckel, P.; Lelieveld, J. Influence of different convection parameterisations in a GCM. Atmos. Chem. Phys 2006, 6, 5475–5493. [Google Scholar]
- Trenberth, K.; Jones, P.; Ambenje, P.; Bojariu, R.; Easterling, D.; Tank, A.K.; Parker, D.; Rahimzadeh, F.; Renwick, J.; Rusticucci, M.; Soden, B.; Zhai, P. Observations: Surface and Atmospheric Climate Change. In Climate Change 2007: The Physical Science Basis. Contribution of Working Group I to the Fourth Assessment Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: London, UK, 2007. [Google Scholar]
- European Space Agency. WALES–Water Vapour Lidar Experiment in Space, Reports for Mission Selection, The Six Candidate Earth Explorer Missions; Technical Report; ESA: Noordwijk, The Netherlands, 2004.
- Lacis, A.A.; Schmidt, G.A.; Rind, D.; Ruedy, R.A. Atmospheric CO2: Principal control knob governing Earth’s temperature. Science 2010, 330, 356–359. [Google Scholar]
- Solomon, S.; Rosenlof, K.H.; Portmann, R.W.; Daniel, J.S.; Davis, S.M.; Sanford, T.J.; Plattner, G.K. Contributions of stratospheric water vapor to decadal changes in the rate of global warming. Science 2010, 327. [Google Scholar] [CrossRef]
- Brewer, A.W. Evidence for a world circulation provided by the measurements of helium and water vapour distribution in the stratosphere. Q. J. R. Meteorol. Soc 1949, 75, 326. [Google Scholar]
- Hegglin, M.I.; Boone, C.D.; Manney, G.L.; Walker, K.A. A global view of the extratropical tropopause transition layer from Atmospheric Chemistry Experiment Fourier Transform Spectrometer O3, H2O, and CO. J. Geophys. Res 2009, 14, D00B11. [Google Scholar]
- Kirk-Davidoff, D.B.; Hintsa, E.J.; Anderson, J.G.; Keith, D.W. The effect of climate change on ozone depletion through changes in stratospheric water vapour. Nature 1999, 402, 399–401. [Google Scholar]
- Pan, L.L.; Bowman, K.P.; Shapiro, M.; Randel, W.J.; Gao, R.S.; Campos, T.; Davis, C.; Schauffler, S.; Ridley, B.A.; Wei, J.C.; Barnet, C. Chemical behavior of the tropopause observed during the Stratosphere-Troposphere Analyses of Regional Transport experiment. J. Geophys. Res 2007, 112, D18110. [Google Scholar]
- Birner, T.; Sankey, D.; Shepherd, T.G. The tropopause inversion layer in models and analyses. Geophys. Res. Lett 2006, 33, L14804. [Google Scholar]
- Randel, W.J.; Wu, F.; Forster, P. The extratropical tropopause inversion layer: Global observations with GPS data and a radiative forcing mechanism. J. Atmos. Sci 2007, 64, 4489–4496. [Google Scholar]
- Forster, P.; Ramaswamy, V.; Artaxo, P.; Berntsen, T.; Betts, R.; Fahey, D.; Haywood, J.; Lean, J.; Lowe, D.; Myhre, G.; Nganga, J.; Prinn, R.; Raga, G.; Schulz, M.; Dorland, R.V. Changes in Atmospheric Constituents and in Radiative Forcing. In Climate Change 2007: The Physical Science Basis. Contribution of Working Group I to the Fourth Assessment Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: London, UK, 2007. [Google Scholar]
- Haywood, J.M.; Ramaswamy, V.; Soden, B. Tropospheric aerosol climate forcing in clear-sky satellite observations over the oceans. Science 1999, 283, 1299–1303. [Google Scholar]
- King, M.; Kaufman, Y.; Tanre, D.; Nakajima, T. Remote sensing of tropospheric aerosols from space: Past, present and future. Bull. Am. Meteorol. Soc 1999, 80, 2229–2259. [Google Scholar]
- Kent, G.; Wang, P.; McCormick, P.; Skeens, K. Multiyear Stratospheric Aerosol and Gas Experiment—II Measurements of upper-tropospheric aerosol characteristics. J. Geophys. Res 1995, 100, 13875–13899. [Google Scholar]
- Wylie, D.; Menzel, W. Eight years of high cloud statistics using HIRS. J. Climate 1999, 12, 170–184. [Google Scholar]
- Chen, T.; Rossow, W.B.; Zhang, Y. Radiative effects of cloud-type variations. J. Climate 2000, 13, 264–286. [Google Scholar]
- Peter, T. Microphysics and heterogeneous chemistry of polar stratospheric clouds. Ann. Rev. Phys. Chem 1997, 48, 785–822. [Google Scholar]
- Pitts, M.C.; Poole, L.R.; Dörnbrack, A.; Thomason, L.W. The 2009–2010 Arctic polar stratospheric cloud season: a CALIPSO perspective. Atmos. Chem. Phys. Discuss 2010, 10, 24205–24243. [Google Scholar]
- Plane, J.M.C.; Murray, B.J.; Chu, X.; Gardner, C.S. Removal of meteoric iron on polar mesospheric clouds. Science 2004, 304, 426–428. [Google Scholar]
- Pérot, K.; Hauchecorne, A.; Montmessin, F.; Bertaux, J.L.; Blanot, L.; Dalaudier, F.; Fussen, D.; Kyrölä, E. First climatology of polar mesospheric clouds from GOMOS/ENVISAT stellar occultation instrument. Atmos. Chem. Phys 2010, 10, 2723–2735. [Google Scholar] [Green Version]
- Eyring, V.; Butchart, N.; Waugh, D.; Akiyoshi, H.; Austin, J.; Bekki, S.; Bodeker, G.; Boville, B.; Brühl, C.; Chipperfield, M.; et al. Assessment of temperature, trace species, and ozone in chemistry-climate model simulations of the recent past. J. Geophys. Res 2006, 111. [Google Scholar] [CrossRef]
- Eyring, V.; Waugh, D.; Bodeker, G.; Cordero, E.; Akiyoshi, H.; Austin, J.; Beagley, S.; Boville, B.; Braesicke, P.; Bruhl, C.; et al. Multimodel projections of stratospheric ozone in the 21st century. J. Geophys. Res 2007, 112. [Google Scholar] [CrossRef]
- Dee, D.; Uppala, S. Variational bias correction of satellite radiance data in the ERA-Interim reanalysis. Q. J. Roy. Meteorol. Soc 2009, 135, 1830–1841. [Google Scholar]
- Wang, J.; Carlson, D.J.; Parsons, D.B.; Hock, T.F.; Lauritsen, D.; Cole, H.L.; Beierle, K.; Chamberlain, E. Performance of operational radiosonde humidity sensors in direct comparison with a chilled mirror dew-point hygrometer and its climate implication. Geophys. Res. Lett 2003, 30. [Google Scholar] [CrossRef]
- Sun, B.; Reale, A.; Seidel, D.J.; Hunt, D.C. Comparing radiosonde and COSMIC atmospheric profile data to quantify differences among radiosonde types and the effects of imperfect collocation on comparison statistics. J. Geophys. Res 2010, 115. [Google Scholar] [CrossRef]
- Noël, S.; Bramstedt, K.; Rozanov, A.; Bovensmann, H.; Burrows, J. Water vapour profiles from SCIAMACHY solar occultation measurements derived with an onion peeling approach. Atmos. Meas. Tech 2010, 3, 523–535. [Google Scholar]
- Nassar, R.; Bernath, P.F.; Boone, C.D.; Manney, G.L.; McLeod, S.D.; Rinsland, C.P.; Skelton, R.; Walker, K.A. Stratospheric abundances of water and methane based on ACE-FTS measurements. Geophys. Res. Lett 2005, 32, L15S04. [Google Scholar]
- Kyrölfä, E.; Tamminen, J.; Sofieva, V.; Bertaux, J.L.; Hauchecorne, A.; Dalaudier, F.; Fussen, D.; Vanhellemont, F.; d’Andon, O.F.; Barrot, G.; Guirlet, M.; Mangin, A.; Blanot, L.; Fehr, T.; de Miguel, L.S.; Fraisse, R. Retrieval of atmospheric parameters from GOMOS data. Atmos. Chem. Phys. Discuss 2010, 10, 10145–10217. [Google Scholar]
- WMO. WMO Observational Requirements and Capabilities Database. 2010. Available online: http://www.wmo.int/pages/prog/sat/Databases.html (accessed on 26 March 2012).
- US EPA. Air Quality Criteria for Ozone and Related Photochemical Oxidants; Volume 1, Technical Report; US Environmental Protection Agency: Research Triangle Park, NC, USA, 2005.
- Ehret, G.; Kiemle, C.; Wirth, M.; Amediek, A.; Fix, A.; Houweling, S. Space-borne remote sensing of CO2, CH4, and N2O by integrated path differential absorption lidar: A sensitivity analysis. Appl. Phys. B 2008, 90, 593–608. [Google Scholar]
- Platt, U.; Stutz, J. Differential Optical Absorption Spectroscopy: Principles and Applications; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Platt, U.; Perner, D.; Pätz, H. Simultaneous measurement of atmospheric CH2O, O3 and NO2 by differential optical absorption spectroscopy. J. Geophys. Res 1979, 84, 6329–6335. [Google Scholar]
- Plane, J.M.C.; Nien, C. Differential optical absorption spectrometer for measuring atmospheric trace gases. Rev. Sci. Instrum 1992, 63, 1867. [Google Scholar]
- Calpini, B.; Simeonov, V. Trace Gas Species Detection in the Lower Atmosphere by Lidar from Remote Sensing of Atmospheric Pollutants to Possible Air Pollution Abatement Strategies. In Laser Remote Sensing; Fuji, T., Fukuchi, T., Eds.; Chapter 4; CRC Press: Boca Raton, FL, USA, 2005; pp. 123–178. [Google Scholar]
- Thomason, L.; Pitts, M.; Winker, D. CALIPSO observations of stratospheric aerosols: A preliminary assessment. Atmos. Chem. Phys 2007, 7, 5283–5290. [Google Scholar]
- Larchevêque, G.; Balin, I.; Nessler, R.; Quaglia, P.; Simeonov, V.; van den Bergh, H.; Calpini, B. Development of a multiwavelength aerosol and water-vapor lidar at the Jungfraujoch Alpine Station (3580 m above sea level) in Switzerland. Appl. Opt 2002, 41, 2781–2790. [Google Scholar]
- Chen, W.N.; Chiang, C.W.; Nee, J.B. Lidar ratio and depolarization ratio for cirrus clouds. Appl. Opt 2002, 41, 6470–6476. [Google Scholar]
- Kirchengast, G.; Schweitzer, S. Climate benchmark profiling of greenhouse gases and thermodynamic structure and wind from space. Geophys. Res. Lett 2011, 38, L13701. [Google Scholar]
- Wirth, M.; Fix, A.; Mahnke, P.; Schwarzer, H.; Schrandt, F.; Ehret, G. The airborne multi-wavelength water vapour differential absorption lidar WALES: System design and performance. Appl. Phys. B 2009, 96, 201–203. [Google Scholar]
- Rosenfeld, D.; Lensky, I. Satellite-based insights into precipitation formation processes in continental and maritime convective clouds. Bull. Am. Meteorol. Soc 1998, 79, 2457–2476. [Google Scholar]
- Cooper, S.J.; LEcuyer, T.S.; Gabriel, P.; Baran, A.J.; Stephens, G.L. Objective assessment of the information content of visible and infrared radiance measurements for cloud microphysical property retrievals over the global oceans. Part II: Ice clouds. J. Appl. Meteor. Climatol 2006, 45, 42–62. [Google Scholar]
- Bizzari, B.; Carboni, E.; Di Paolo, F.; Liberti, G. MTG Imaging Channels in the Solar Domain and 3.7 Microns for Retrieval of Cloud and Aerosol Microphysical Properties; Technical Report Report of Study Contract EUM/CO/04/1293/RSt; Consiglio Nazionale delle Ricerche (CNR), Istituto di Scienze dellAtmosfera e del Clima (ISAC): Roma, Italy, 2004. [Google Scholar]
- Gao, B.C.; Kaufman, Y.J.; Tanre, D.; Li, R.R. Distinguishing tropospheric aerosols from thin cirrus clouds for improved aerosol retrievals using the ratio of 1.38μm and 1.24μm channels. Geophys. Res. Lett 2002, 29, 1890. [Google Scholar]
- Eshagh, M.; Alamadri, M. Perturbations in orbital elements of a low earth orbiting satellite. J. Earth Space Phys 2007, 33, 1–12. [Google Scholar]
- Summa, D.; di Girolamo, P.; Bauer, H.; Wulfmeyer, V. End-To-End Simulation of the Performance of WALES: Retrieval Module. Proceedings of 22nd Internation Laser Radar Conference (ILRC 2004), Matera, Italy, 12–16 July 2004.
- Bauer, H.; Bauer, H.S.; Wulfmeyer, V.; Wirth, M.; Mayer, B.; Ehret, G.; Summa, D.; di Girolamo, P. End-To Simulation of the Performance of Wales: Forward Module. Proceedings of 22nd Internation Laser Radar Conference (ILRC 2004), Matera, Italy, 12–16 July 2004; 561, p. 1011.
- di Girolamo, P.; Summa, D.; Bauer, H.; Wulfmeyer, V.; Behrendt, A.; Ehret, G.; Mayer, B.; Wirth, M.; Kiemle, C. Simulation of the Performance of Wales Based on an End-To-End Model. Proceedings of 22nd Internation Laser Radar Conference (ILRC 2004), Matera, Italy, 12–16 July 2004; 561, p. 957.
- Proschek, V.; Kirchengast, G.; Schweitzer, S. Greenhouse gas profiling by infrared-laser and microwave occultation: retrieval algorithm and demonstration results from end-to-end simulations. Atmos. Meas. Tech 2011, 4, 2035–2058. [Google Scholar]
- Sofieva, V.F.; Vira, J.; Kyrölä, E.; Tamminen, J.; Kan, V.; Dalaudier, F.; Hauchecorne, A.; Bertaux, J.; Fussen, D.; Vanhellemont, F.; Barrot, G.; d’Andon, O.F. Retrievals from GOMOS stellar occultation measurements using characterization of modeling errors. Atmos. Meas. Tech 2010, 3, 1019–1027. [Google Scholar] [Green Version]
- Rothman, L.; Gordon, I.; Barbe, A.; Benner, D.; Bernath, P.; Birk, M.; Boudon, V.; Brown, L.; Campargue, A.; Champion, J.P.; et al. The HITRAN 2008 molecular spectroscopic database. J. Quant. Spectrosc. Radiative Transfer 2009, 110, 533–572. [Google Scholar]
- Dalaudier, F.; Kan, V.; Gurvich, A.S. Chromatic refraction with global ozone monitoring by occultation of stars. I. Description and scintillation correction. Appl. Opt 2001, 40, 866–877. [Google Scholar]
- Sugimoto, N.; Koga, N.; Matsui, I.; Sasano, Y.; Minato, A.; Ozawa, K.; Saito, Y.; Nomura, A.; Aoki, T.; Itabe, T.; Kunimori, H.; Murata, I.; Fukunishi, H. Earth-satellite-earth laser long-path absorption experiment using the retroreflector in space (RIS) on the Advanced Earth Observing Satellite (ADEOS). J. Opt. A: Pure Appl. Opt 1999, 1, 201–209. [Google Scholar]
- Northend, C.; Honey, R.; Evans, W. Laser radar (Lidar) for meteorological observations. Rev. Sci. Instrum 1966, 37, 393–400. [Google Scholar]
- Gurvich, A.S.; Kan, V.; Savchenko, S.A.; Pakhomov, A.I.; Padalka, G.I. Studying the turbulence and internal waves in the stratosphere from spacecraft observations of stellar scintillation: II. Probability distributions and scintillation spectra. Izvestiya Atmos. Oceanic Phys 2001, 37, 452–465. [Google Scholar]
- Sofieva, V.F.; Gurvich, A.S.; Dalaudier, F.; Kan, V. Reconstruction of internal gravity wave and turbulence parameters in the stratosphere using GOMOS scintillation measurements. J. Geophys. Res 2007, 112, D12113. [Google Scholar]
- Sofieva, V.F.; Kyrölä, E.; Hassinen, S.; Backman, L.; Tamminen, J.; Seppälä, A.; Thölix, L.; Gurvich, A.S.; Kan, V.; Dalaudier, F.; Hauchecorne, A.; Bertaux, J.L.; Fussen, D.; Vanhellemont, F.; et al. Global analysis of scintillation variance: Indication of gravity wave breaking in the polar winter upper stratosphere. Geophys. Res. Lett 2007, 34, L03812. [Google Scholar]
- Sofieva, V.; Kan, V.; Dalaudier, F.; Kyrola, E.; Tamminen, J.; Bertaux, J.L.; Hauchecorne, A.; Fussen, D.; Vanhellemont, F. Influence of scintillation on quality of ozone monitoring by GOMOS. Atmos. Chem. Phys 2009, 9, 9197–9207. [Google Scholar] [Green Version]
- Loescher, A. Atmospheric influence on a laser beam observed on the OICETS–ARTEMIS communication demonstration link. Atmos. Meas. Tech 2010, 3, 1233–1239. [Google Scholar]
- Takayama, Y.; Jono, T.; Koyama, Y.; Kura, N.; Shiratama, K.; Demelenne, B.; Sodnik, Z.; Bird, A.; Arai, K. Observation of atmospheric influence on OICETS inter-orbit laser communication demonstrations. Proc. SPIE 2007, 6709, 67091B. [Google Scholar]
- Schweitzer, S.; Kirchengast, G.; Proschek, V. Atmospheric influences on infrared-laser signals used for occultation measurements between Low Earth Orbit satellites. Atmos. Meas. Tech 2011, 4, 2273–2292. [Google Scholar]
- Sofieva, V. Atmospheric Impacts on ILO Signals: Assessment of Infrared Scintillations; ESA-ESTEC Technical Note 3, Part of the TR-IRPERF Report; Technical Report; Finnish Meteorological Institute (FMI): Helsinki, Finland, 2009. [Google Scholar]
- MacKerrow, E.P.; Schmitt, M.J.; Thompson, D.C. Effect of speckle on lidar pulse-pair ratio statistics. Appl. Opt 1997, 36, 8650–8669. [Google Scholar]
- Bufton, J.L.; Iyer, R.S.; Taylor, L.S. Scintillation statistics caused by atmospheric turbulence and speckle in satellite laser ranging. Appl. Opt 1977, 16, 2408–2413. [Google Scholar]
- Killinger, D.K.; Menyuk, N. Effect of turbulence-induced correlation on laser remote sensing error. Appl. Phys. Lett 1981, 38, 968–970. [Google Scholar]
- Belen’kii, M.S. Effect of residual turbulent scintillation and a remote-sensing technique for simultaneous determination of turbulence and scattering parameters of the atmosphere. J. Opt. Soc. Am 1994, 11, 1150–1158. [Google Scholar]
- Ertel, K. Application and Development of Water Vapour DIAL Systems. University of Hamburg, Hamburg, Germany, 2004. [Google Scholar]
- Griseri, G. SILEX Pointing Acquisition and Tracking: Ground Test and Flight Performances. Proceedings of the 4th ESA International Conference on Spacecraft Guidance, Navigation and Control Systems, Noordwijk, The Netherlands, 18–21 October 1999.
- Govaerts, Y.; Arriaga, A.; Schmetz, J. Operational vicarious calibration of the MSG/SEVIRI solar channels. Adv. Space Res 2001, 28, 21–30. [Google Scholar]
- Kucharski, D.; Kirchner, G.; Koidl, F.; Cristea, E. 10 Years of LAGEOS-1 and 15 years of LAGEOS-2 spin period determination from SLR data. Adv. Space Res 2009, 43, 1926–30. [Google Scholar]
- Wang, S.; Jin, G.; Xu, K. Design of simulation platform for high precision laser communication small satellite constellation. Opt. Precision Eng 2008, 16, 1554–1559. [Google Scholar]
- Lübberstedt, H.; Koebel, D.; Hansen, F.; Brauer, P. MAGNAS—Magnetic Nanoprobe Swarm. Acta Astronautica 2005, 56, 209–212. [Google Scholar]
- Fields, R.; Lunde, C.; Wong, R.; Wicker, J.; Kozlowski, D.; Jordan, J.; Hansen, B.; Muehlnikel, G.; Scheel, W.; Sterr, U.; Kahle, R.; Rolf, M. NFIRE-to-TerraSAR-X laser communication results: Satellite pointing, disturbances, and other attributes consistent with successful performance. Proc. SPIE 2009, 7330, 73300Q. [Google Scholar]
- Edwards, D. Michelson Interferometer for Passive Atmospheric Sounding: Development of a Reference forward Algorithm for the Simulation of MIPAS Atmospheric Limb Emission Spectral; Technical Report ESTEC11886/96/NL/GS; Institute of Atmospheric, Oceanic and Planetary Physics, University of Oxford: Oxford, UK, 1996. [Google Scholar]
- Anderson, G.; Clough, S.; Kneizys, F.; Chetwynd, J.; Shettle, E. AFGL Atmopsheric Constituent Profiles (0–120 km); Technical Report 954; Air Force Geophysics Laboratory: Hanscom AFB, MA, USA, 1986. [Google Scholar]
- Measures, R.M. Laser Remote Sensing: Fundamentals and Applications; Wiley: New York, NY, USA, 1984. [Google Scholar]
- Rees, G. Physical Principles of Remote Sensing; Cambridge University Press: Cambridge, UK, 2001. [Google Scholar]
- Laforce, F. Low noise optical receiver using Si APD. Proc. SPIE 2009, 7212, 721210. [Google Scholar]
- Kirchengast, G.; Schweitzer, S.; Proschek, V.; Bernath, P.; Thomas, B.; Harrison, J.; Allen, N.; Li, G.; Abad, G.G. ALPS (ACCURATE LIO Performance Simulator) User Guide and Documentation; WEGC Technical Report for ESA-ESTEC No. 3/2010; Wegener Center, University of Graz: Graz, Austria, 2010. [Google Scholar]
- Sun, X.; Krainak, M.A.; Abshire, J.B.; Spinhirne, J.D.; Trottier, C.; Davies, M.; Dautet, H.; Allan, G.R.; Lukemire, A.T.; Vandiver, J.C. Space-qualified silicon avalanche-photodiode single-photo-counting modules. J. Modern Opt 2004, 51, 1333–1350. [Google Scholar]
- McIntyre, R. Multiplication noise in uniform avalanche diodes. IEEE Trans. Electron Dev 1966, 13, 164–168. [Google Scholar]
- PerkinElmer Optoelectronics. Avalanche Photodiodes (APDs), A User Guide: Understanding Avalanche Photodiode for Improving System Performance; PerkinElmer Optoelectronics: Fremont, CA, USA, 2010. Available online: http://www.perkinelmer.com/CMSResources/Images/44-6538APP_AvalanchePhotodiodesUsersGuide.pdf (accessed on 26 March 2012).
Appendix: Details of SNR and Error Calculations for the IPDALLS System










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instrument key parameter | Unit | Value | Comment/Origin |
|---|---|---|---|
| Transmitter | |||
| Pulse energy @ 935 nm | [mJ] | 75 | aligned with [4] |
| Effective pulse length (τL) | [ns] | 75 | aligned with [33] |
| Laser beam divergence (θl) | [μrad] | 15 | system preliminary design (minimize beam broadening) |
| Receiver | |||
| Telescope diameter (Drec) | [m] | 0.50 | system preliminary design |
| Telescope field-of-view (FOVrec) | [μrad] | 280 | system preliminary design, aligned with [33] |
| System optical efficiency (ηsys) | [-] | 0.40 | estimate, aligned with [33] |
| Detector (Excelitas/PerkinElmer Si APD C30954E-DTC) | |||
| Nominal gain (M) | [-] | 120 | product specification |
| Responsivity @ 900 nm (R) | [A/W] | 75 | spec, unit gain responsivity estimated as R0 = R/M |
| Maximum peak rating | [mA] | 10 | product specification |
| Surface dark current @ 22 °C (Ids) | [nA] | 50 | value obtained from manufacturer |
| Bulk dark current @ 22 °C (Idb) | [pA] | 200 | value obtained from manufacturer (range 1–200) |
| Retroreflector | |||
| Effective reflector area (Aref) | [m2] | 0.20 | system preliminary design |
| Reflector efficiency (ηref) | [-] | 0.80 | estimate |
| Reflector beam divergence (θr) | [μrad] | 40 | estimate, larger than twice the laser beam divergence |
| Primary Spacecraft | Retroreflector Spacecraft | |||
|---|---|---|---|---|
| Component | Mass (kg) | Power (W) | Mass (kg) | Power (W) |
| Payload | 1,100 | 1,500 | 44 | – |
| Spacecraft Bus | 1,280 | 700 | 45 | 16 |
| Margin | 600 | 530 | 21 | 4 |
| Spacecraft Dry Mass | 2,980 | – | 110 | – |
| Propellant | 280 | – | 16 | – |
| Total | 3,260 | 2,730 | 126 | 20 |
Share and Cite
Hoffmann, A.; Clifford, D.; Aulinas, J.; Carton, J.G.; Deconinck, F.; Esen, B.; Hüsing, J.; Kern, K.; Kox, S.; Krejci, D.; et al. A Novel Satellite Mission Concept for Upper Air Water Vapour, Aerosol and Cloud Observations Using Integrated Path Differential Absorption LiDAR Limb Sounding. Remote Sens. 2012, 4, 867-910. https://doi.org/10.3390/rs4040867
Hoffmann A, Clifford D, Aulinas J, Carton JG, Deconinck F, Esen B, Hüsing J, Kern K, Kox S, Krejci D, et al. A Novel Satellite Mission Concept for Upper Air Water Vapour, Aerosol and Cloud Observations Using Integrated Path Differential Absorption LiDAR Limb Sounding. Remote Sensing. 2012; 4(4):867-910. https://doi.org/10.3390/rs4040867
Chicago/Turabian StyleHoffmann, Alex, Debbie Clifford, Josep Aulinas, James G. Carton, Florian Deconinck, Berivan Esen, Jakob Hüsing, Katharina Kern, Stephan Kox, David Krejci, and et al. 2012. "A Novel Satellite Mission Concept for Upper Air Water Vapour, Aerosol and Cloud Observations Using Integrated Path Differential Absorption LiDAR Limb Sounding" Remote Sensing 4, no. 4: 867-910. https://doi.org/10.3390/rs4040867