Review of the CALIMAS Team Contributions to European Space Agency’s Soil Moisture and Ocean Salinity Mission Calibration and Validation

 , ,
, , 
 , , , ,
, , , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The assessment of SMOS calibration, stability and image reconstruction algorithms;
- The preliminary assessment of salinity retrieval algorithms and validation of SMOS salinity products;
- The assessment of sea surface salinity errors sources in a regional simulation of a numerical model;
- The verification of SMOS image reconstruction and ocean salinity (and soil moisture) retrieval with the small airborne MIRAS; and
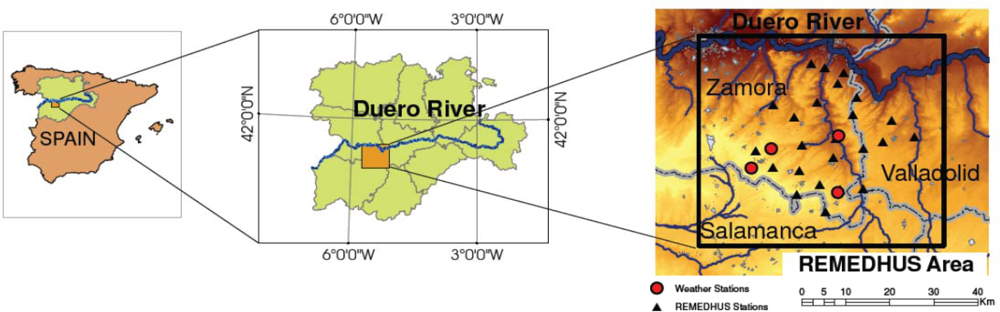
- The assessment of mixed pixel effects and disaggregation techniques in the REMEDHUS soil moisture network (Zamora, Spain).
2. Results and Discussion
2.1. Instrument Calibration
- The analysis of the PMS offset jumps was found to be linked to the signal controlling the heaters (Figure 1(a)). A correction was implemented to estimate the offset from its mean value, the physical temperature, and the heater signals. After this correction, the residual offsets presented only the random fluctuation due to thermal noise and small physical temperature drift (Figure 1(b)).
- The re-analysis of the PMS gain sensitivity to the in-orbit physical temperature drifts. These sensitivity values have been used to properly calibrate these gains (Figure 1(c), red line). The obtained calibrated values are consistent with the ones obtained during the on-ground characterization (Figure 1(c), blue line).
- The analysis of the local oscillator (LO) phase drifts impact on the phase of the complex correlators’ gain for baselines not sharing a common LO. It was found that these baselines present a significant variation, which was not related to the physical temperature drifts of the receivers involved, but to the LO phase drift [19]. In-orbit local oscillator phase drifts have also been analyzed to determine the optimum inter-calibration period. Figure 1d shows the phase evolution of a given baseline when the LO calibration rate is 6 minutes and the phase is interpolated between calibrations considering an inter-calibration period of 12 min. The optimal LO calibration frequency is still under investigation, and some studies suggest that the optimum period is around 6–7 min [20]. After a proper characterization of the calibration system (CAS) with deep sky observations and cross-check with on-ground measurements, MIRAS calibration using internal and external modes was performed [21,22].
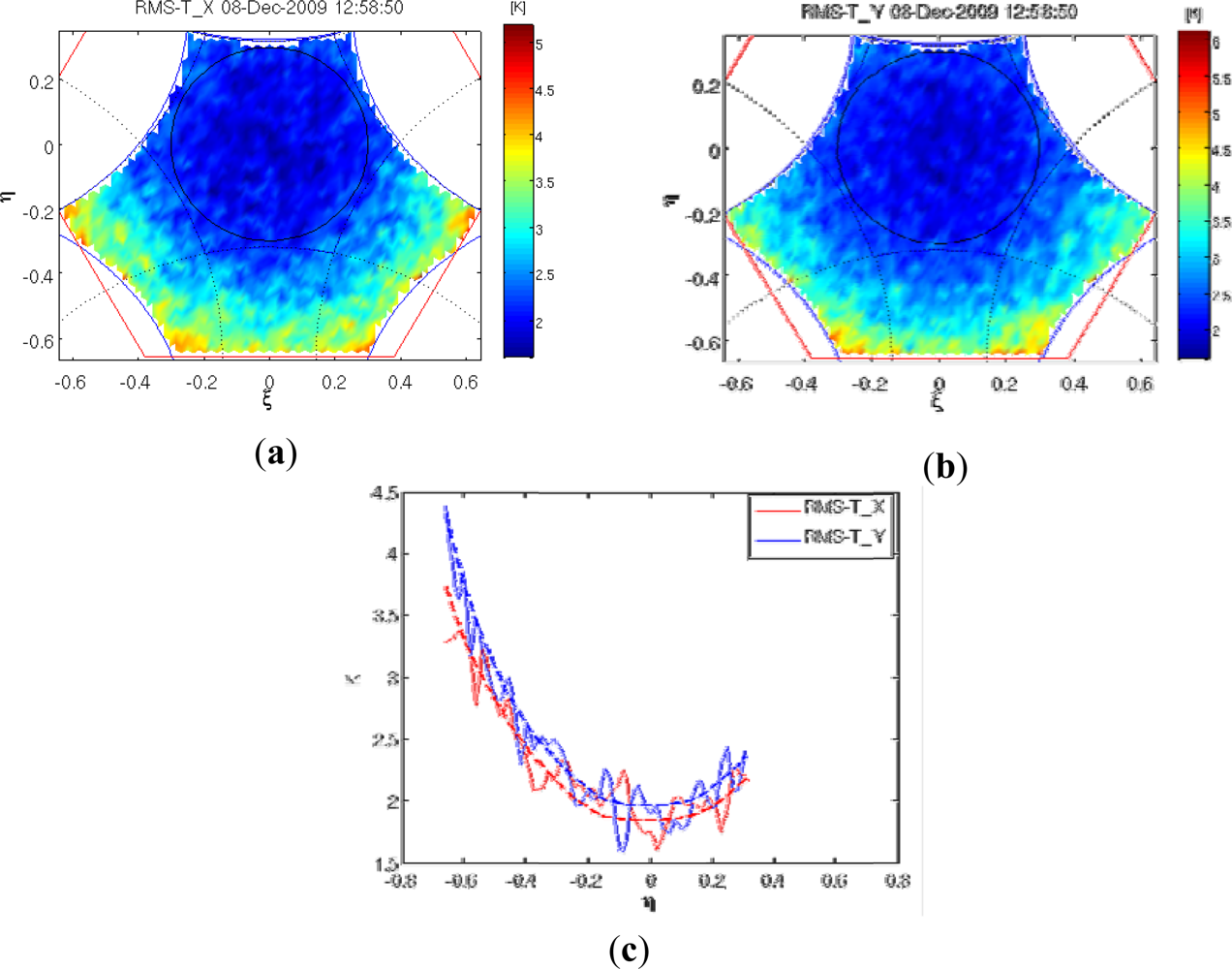
2.2. Image Reconstruction
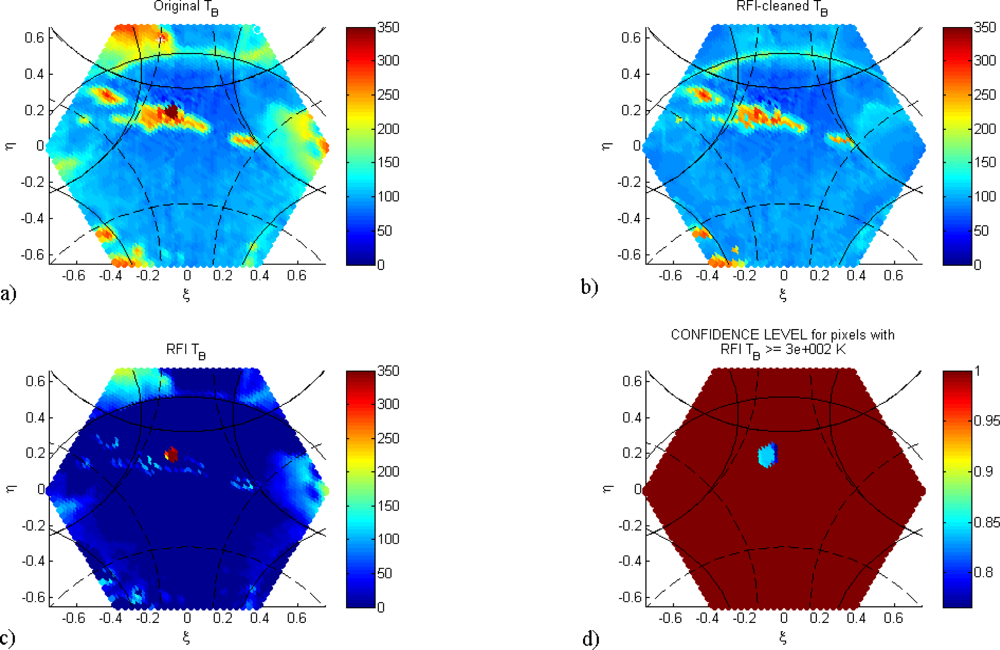
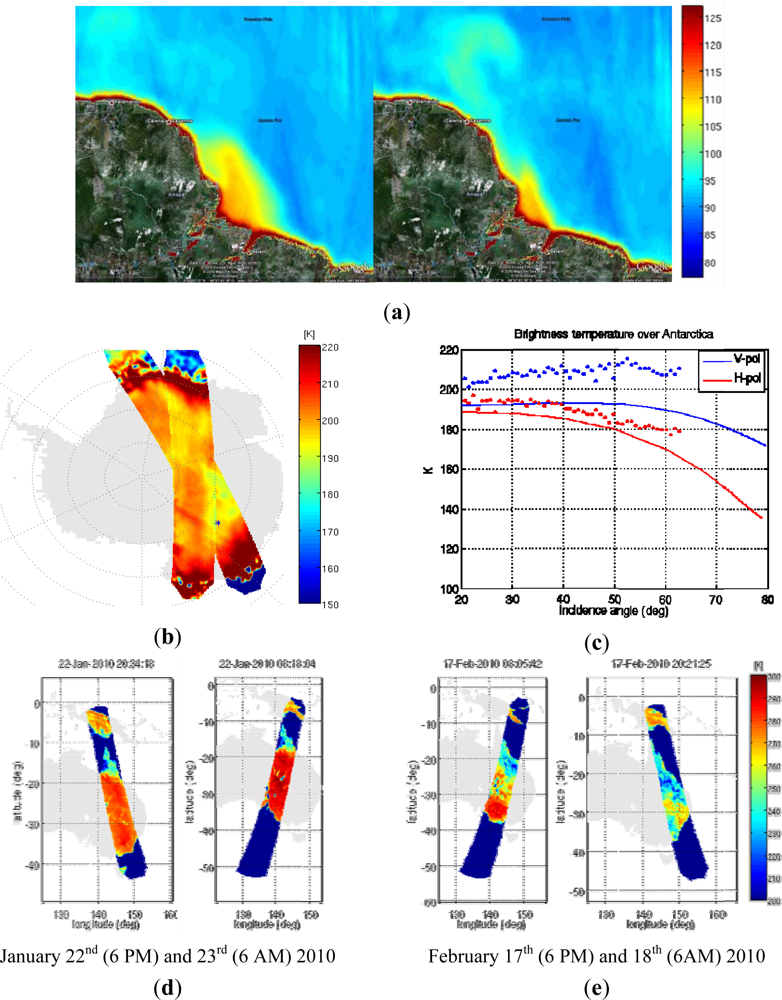
2.3. Radio Frequency Interference Detection and Mitigation
3. Preliminary Assessment of Ocean Salinity Retrieval Algorithms
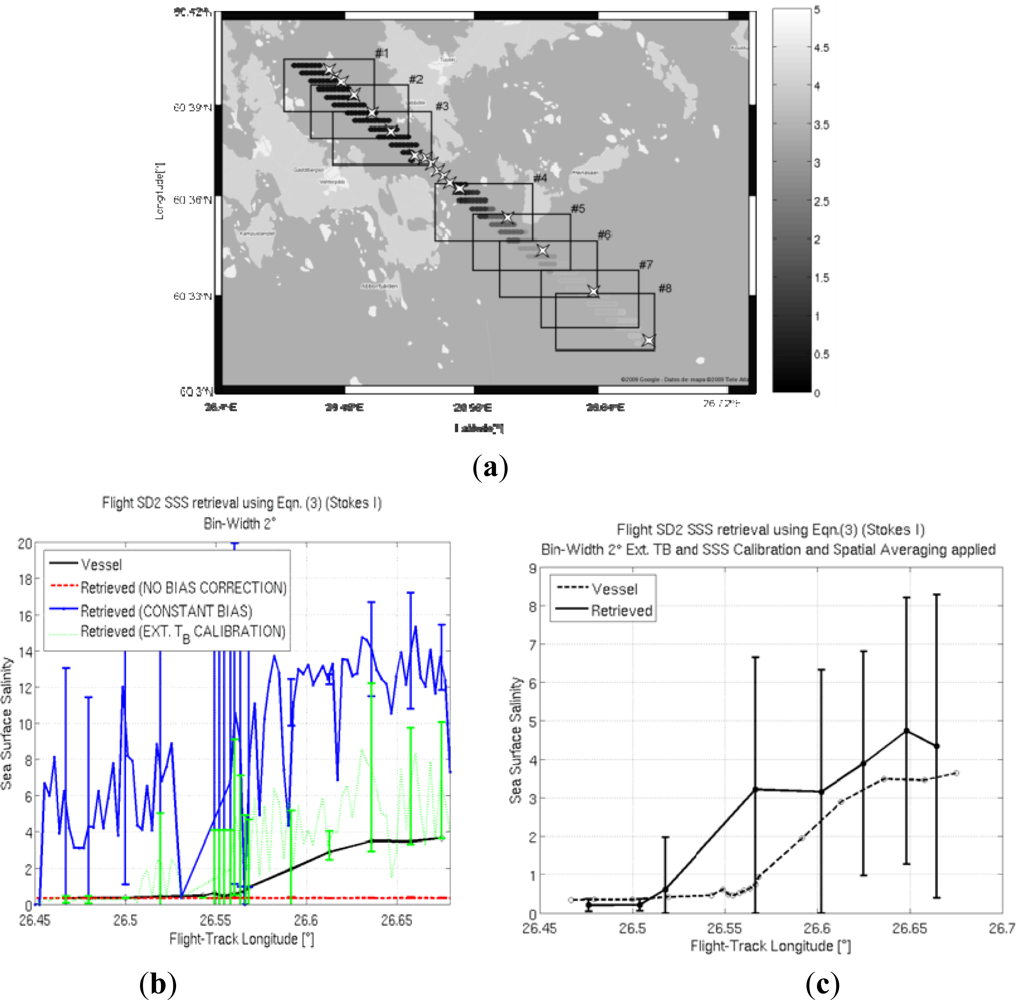
3.1. Early Sea Surface Salinity Retrievals Using Two-Dimensional L-band Interferometric Radiometers
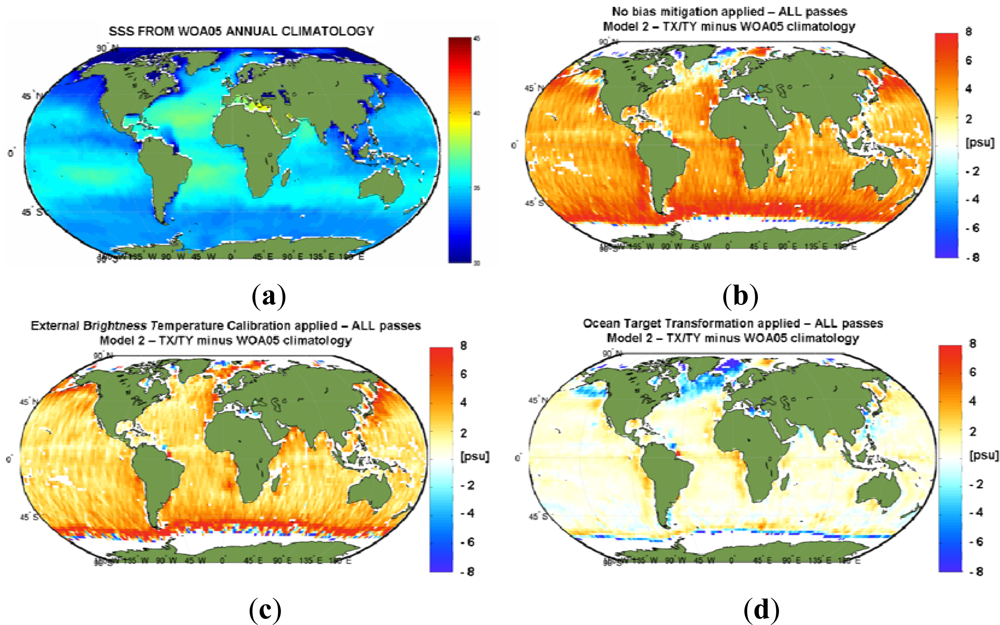
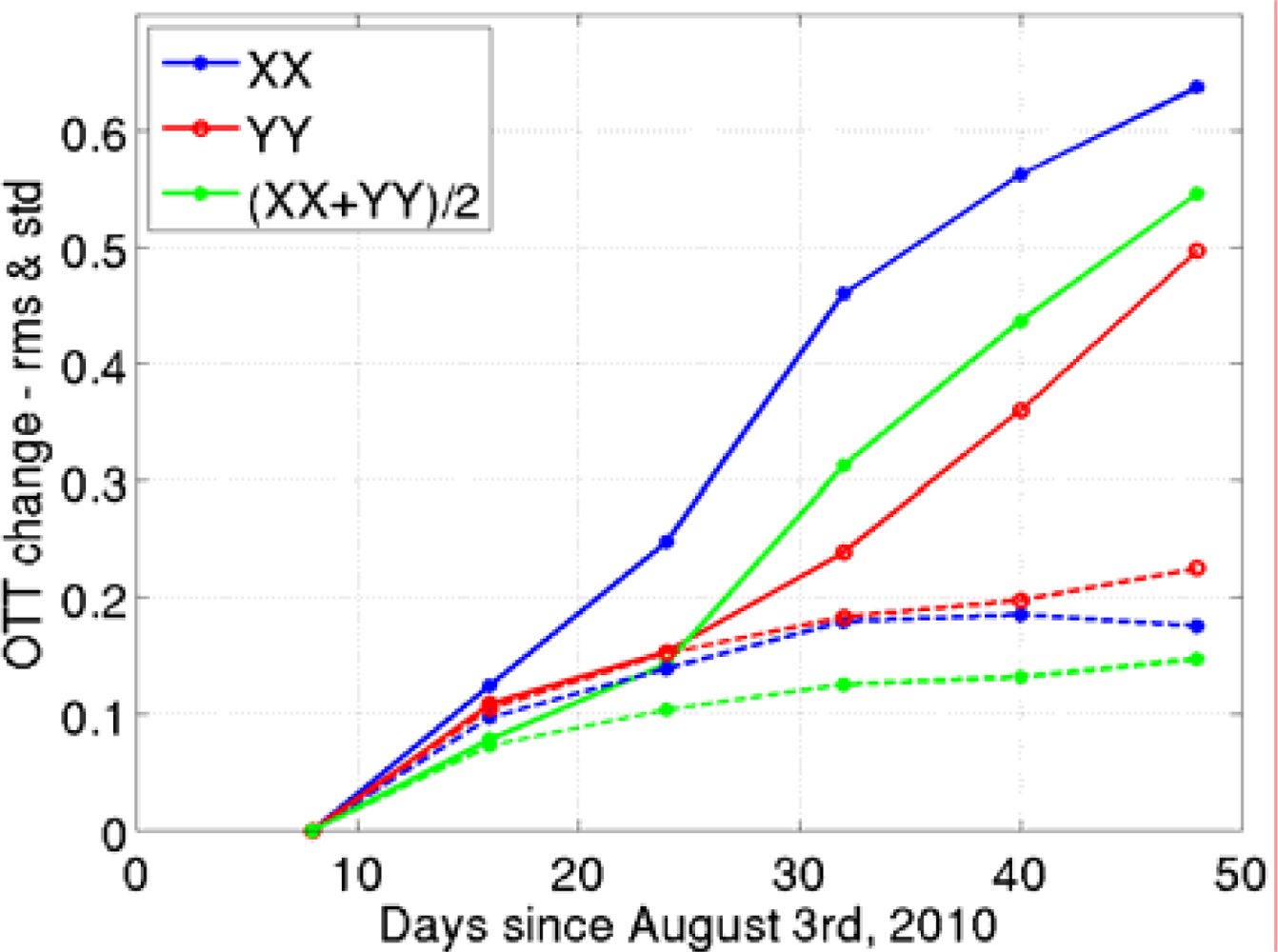
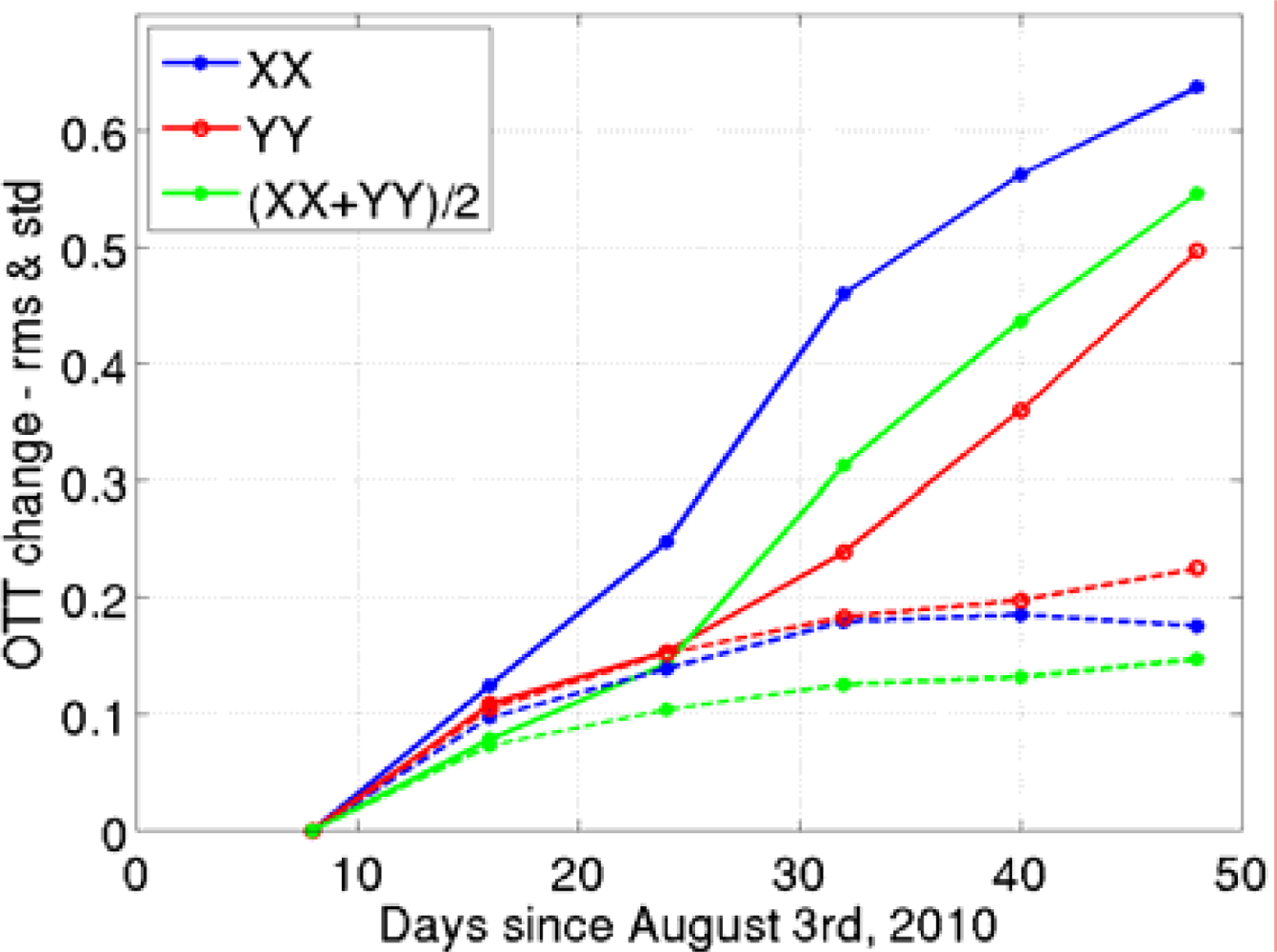
3.2. The Ocean Target Transformation
- The external brightness temperature calibration, in which an average TB is computed in the field of view using some a priori geophysical parameters, and this value is subtracted from the average TB measured in the field of view [42].
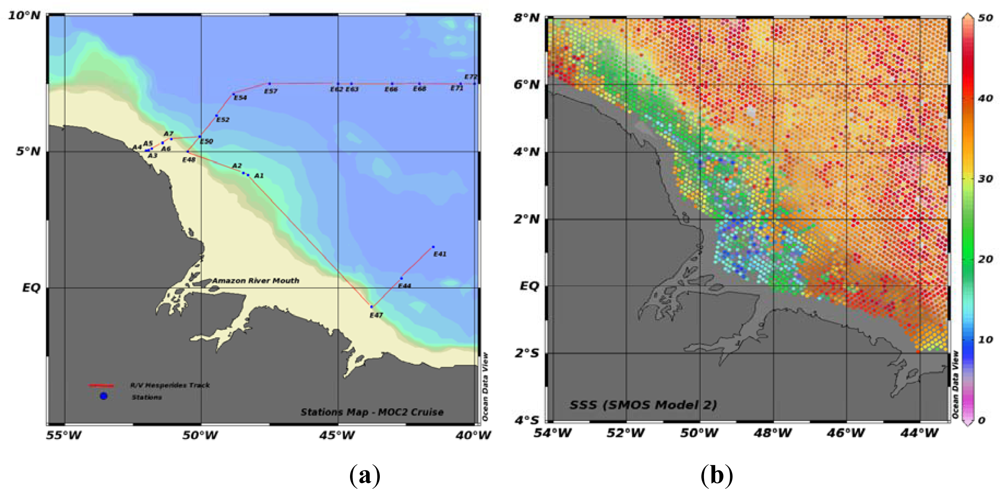
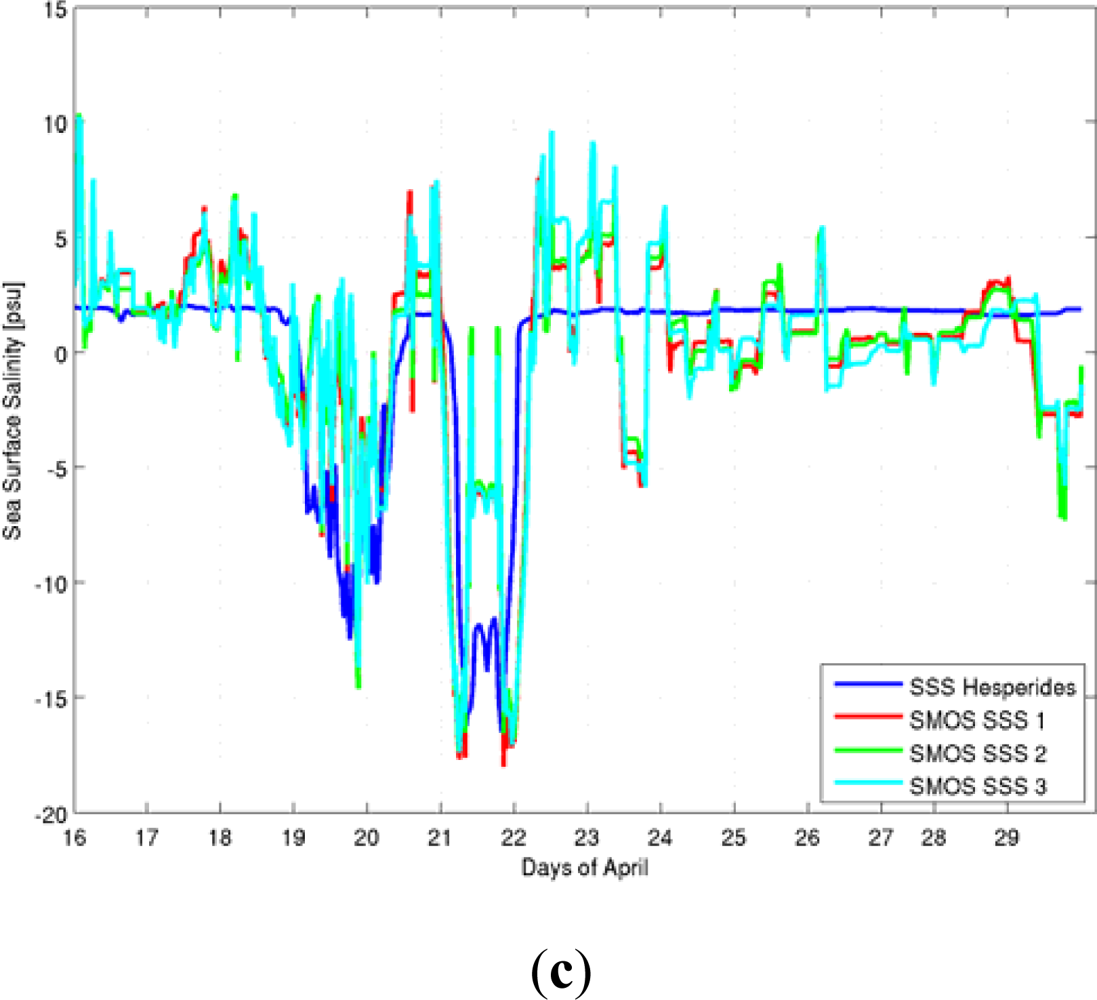
3.3. Validation of SMOS Salinity Products by in situ Oceanographic Measurements
3.4. Assessment of SSS Error Sources in a Numerical Model Regional Simulation
4. Soil Moisture Downscaling Algorithms
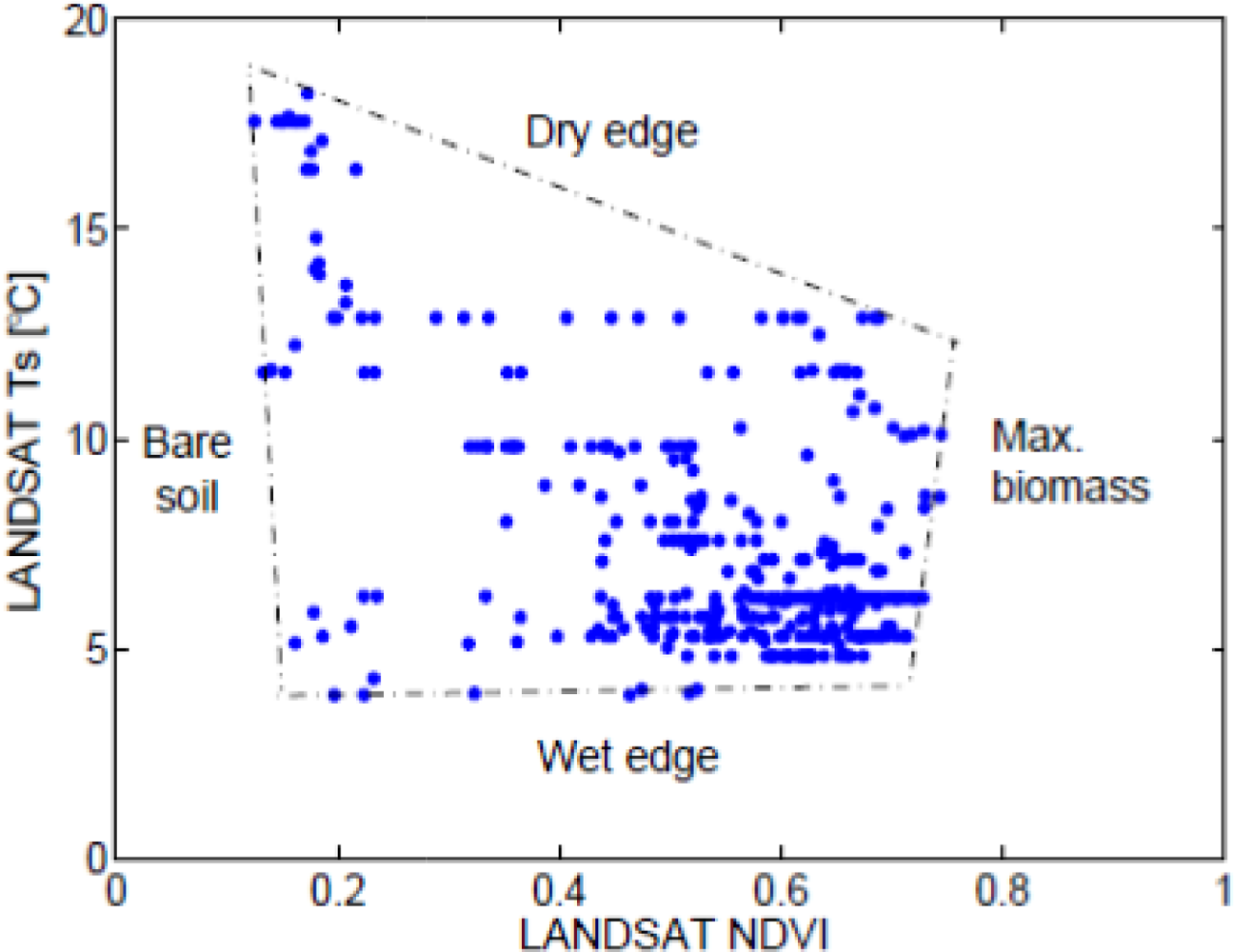
4.1. Downscaling Approach for Airborne Data at the REMEDHUS Site
4.2. Downscaling Approach for SMOS
4.3. High Resolution Soil Moisture Maps: SMOS-BEC Research Product
5. Preparatory Activities to Improve the Performance of Eventual SMOS Follow-on Missions
5.1. Application to Sea State Correction
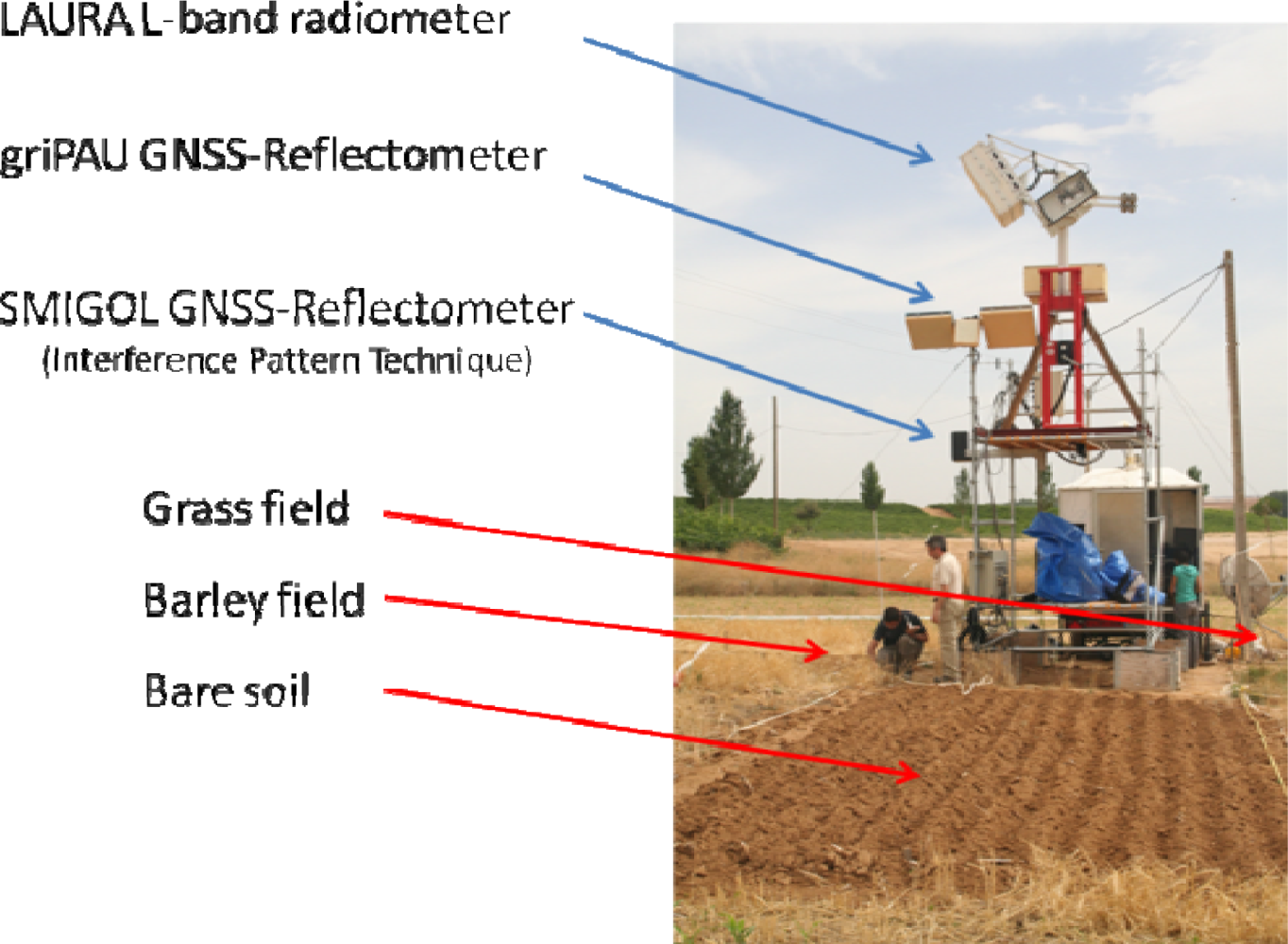
5.2. Application to Soil Moisture Monitoring
6. Summary and Conclusions
Acknowledgments
References
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.P.; Martinuzzi, J.M.; Font, J.; Berger, J.M. Soil moisture retrieval from space: The Soil Moisture and Ocean Salinity (SMOS) mission. IEEE Trans. Geosci. Remote Sens 2001, 39, 1729–1735. [Google Scholar]
- Font, J.; Camps, A.; Borges, A.; Martín-Neira, M.; Kerr, Y.H.; Hahne, A.; Macklenburg, S. The challenging sea surface salinity measurement from space. Proc. IEEE 2010, 98, 649–665. [Google Scholar]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.P.; Delwart, S.; Cabot, F.; Boutin, J.; Escorihuela, M.J.; Font, J.; Reul, N.; Gruhier, C.; et al. The SMOS mission: New tool for monitoring key elements of the global water cycle. Proc. IEEE 2010, 98, 666–687. [Google Scholar]
- Mecklenburg, S.; Drusch, M.; Kerr, Y.H.; Font, J.; Martin-Neira, M.; Delwart, S.; Buenadicha, G.; Reul, N.; Daganzo-Eusebio, E.; Oliva, R.; Crapolicchio, R. ESA’s Soil Moisture and Ocean Salinity mission: Mission performance and operations. IEEE Trans. Geosci. Remote Sens, 2011; submitted. [Google Scholar]
- McMullan, K.; Brown, M.; Martin-Neira, M.; Rits, W.; Ekholm, S.; Marti, J.; Lemanczyk, J. SMOS: The payload. IEEE Trans. Geosci. Remote Sens 2008, 46, 594–605. [Google Scholar]
- Font, J.; Camps, A.; Ballabrera-Poy, J. Microwave Aperture Synthesis Radiometry: Setting the Path for Operational Sea Salinity Measurement from Space. In Remote Sensing of European Seas; Barale, V., Gade, M., Eds.; Springer-Verlag: New York, NY, USA, 2008; pp. 223–238. [Google Scholar]
- Kerr, Y.H.; Waldteufel, P.; Richaume, P.; Wigneron, J.P.; Ferrazzoli, P.; Mahmoodi, A.; Al Bitar, A.; Cabot, F.; Gruhier, C.; Juglea, S.; et al. The SMOS soil moisture retrieval algorithm. IEEE Trans. Geosci. Remote Sens 2012. [Google Scholar] [CrossRef]
- Zine, S.; Boutin, J.; Font, J.; Reul, N.; Waldteufel, P.; Gabarró, C.; Tenerelli, J.; Petitcolin, F.; Vergely, J.L.; Talone, M.; Delwart, S. Overview of the SMOS sea surface salinity prototype processor. IEEE Trans. Geosci. Remote Sens 2008, 46, 621–645. [Google Scholar]
- Yueh, S.H.; West, R.; Wilson, W.J.; Li, F.K.; Njoku, E.G.; Rahmat-Samii, Y. Error sources and feasibility for microwave remote sensing of ocean surface salinity. IEEE Trans. Geosci. Remote Sens 2001, 39, 1049–1060. [Google Scholar]
- Lagerloef, G.S.E.; Swift, C.T.; LeVine, D.M. Sea surface salinity: The next remote sensing challenge. Oceanography 1995, 8, 44–50. [Google Scholar]
- Wigneron, J.P.; Kerr, Y.H.; Waldteufel, P.; Saleh, K.; Escorihuela, M.J.; Richaume, P.; Ferrazzoli, P.; de Rosnay, P.; Gurney, R.; Calvet, J.C.; et al. L-band microwave emission of the biosphere (L-MEB) model: Description and calibration against experimental data sets over crop fields. Remote Sens. Environ 2007, 107, 639–655. [Google Scholar]
- Oliva, R.; Martin-Neira, M.; Corbella, I.; Torres, F.; Kainulainen, J.; Tenerelli, J.; Cabot, F.; Martin-Porqueras, F. SMOS calibration and performances after one year of data. IEEE Trans. Geosci. Remote Sens 2012. submitted.. [Google Scholar]
- Font, J.; Boutin, J.; Reul, N.; Spurgeon, P.; Ballabrera-Poy, J.; Chuprin, A.; Gabarró, C.; Gourrion, J.; Guimbard, S.; Hénocq, C.; et al. SMOS first data analysis for sea surface salinity determination. Int. J. Remote Sens, 2012; in press. [Google Scholar]
- Reul, N.; Tenerelli, J.; Boutin, J. Overview of the first SMOS sea surface salinity products, Part I: Quality assessment for the second half of 2010. IEEE Trans. Geosci. Remote Sens, 2012; submitted. [Google Scholar]
- Corbella, I.; Torres, F.; Duffo, N.; González, V.; Camps, A.; Vall-llossera, M. Fast Processing Tool for SMOS Data. Proceedings of the 2008 IEEE Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008; pp. 1152–1155.
- Corbella, I.; Torres, F.; Camps, A.; Colliander, A.; Martin-Neira, M.; Ribo, S.; Rautiainen, K.; Duffo, N.; Vall-llossera, M. MIRAS end-to-end calibration: Application to SMOS L1 processor. IEEE Trans. Geosci. Remote Sens 2005, 43, 1126–1134. [Google Scholar]
- Gutierrez, A.; Barbosa, J.; Almeida, N.; Catarino, N.; Freitas, J.; Ventura, M.; Reis, J. SMOS L1 Processor Prototype: From Digital Counts to Brightness Temperatures. Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 3626–3630.
- Corbella, I.; Torres, F.; Duffo, N.; Martín-Neira, M.; González-Gambau, V.; Camps, A.; Vall-llossera, M. On-ground characterization of the SMOS payload. IEEE Trans. Geosci. Remote Sens 2009, 47, 3123–3133. [Google Scholar]
- Martin-Neira, M. Analysis of LO Phase Drift Calibration; SO-TN-ESA-PLM-6052; Technical Report; European Space Agency-European Space Technology Center (ESA-ESTEC): Noordwijk, The Netherlands, 2007. [Google Scholar]
- Ramos-Perez, I.; Bosch-Lluis, X.; Camps, A.; González, V.; Rodriguez-Alvarez, N.; Valencia, E.; Park, H.; Vall·llosera, M.; Forte, G. Optimum inter-calibration time in synthetic aperture interferometric radiometers: Application to SMOS. IEEE Geosci. Remote Sens, 2012. [Google Scholar] [CrossRef]
- Corbella, I.; Torres, F.; Duffo, N.; Gonzaìlez-Gambau, V.; Pablos, M.; Duran, I.; Martiìn-Neira, M. First Results on MIRAS Calibration and Overall SMOS Performance. Proceedings of the 11th Specialist Meeting on Microwave Radiometry and Remote Sensing of the Environment (MicroRad), Washington, DC, USA, 1–4 March 2010. [CrossRef]
- Brown, M.A.; Torres, F.; Corbella, I.; Colliander, A. SMOS calibration. IEEE Trans. Geosci. Remote Sens 2008, 46, 646–658. [Google Scholar]
- Camps, A.; Bará, J.; Corbella, I.; Torres, F. The processing of hexagonally sampled signals with standard rectangular techniques: Application to 2D large aperture synthesis interferometric radiometers. IEEE Trans. Geosci. Remote Sens 1997, 35, 183–190. [Google Scholar]
- Anterrieu, E. A resolving matrix approach for synthetic aperture imaging radiometers. IEEE Trans. Geosci. Remote Sens 2004, 42, 1649–1656. [Google Scholar]
- Camps, A.; Vall-llossera, M.; Corbella, I.; Duffo, N.; Torres, F. Improved image reconstruction algorithms for aperture synthesis radiometers. IEEE Trans. Geosci. Remote Sens 2008, 46, 146–158. [Google Scholar]
- Corbella, I.; Torres, F.; Camps, A.; Duffo, N.; Vall-llossera, M. Brightness-temperature retrieval methods in synthetic aperture radiometers. IEEE Trans. Geosci. Remote Sens 2009, 47, 285–294. [Google Scholar]
- Camps, A. Aplication of Interferometric Radiometry to Earth Observation. Ph.D. Thesis, Universitat Politècnica de Catalunya, Barcelona, Spain, 1996; Available online: http://hdl.handle.net/10803/6885 (accessed on 5 March 2012).
- Camps, A.; Corbella, I.; Bará, J.; Torres, F. Radiometric sensitivity computation in aperture synthesis interferometric radiometry. IEEE Trans. Geosci. Remote Sens 1998, 35, 680–685. [Google Scholar]
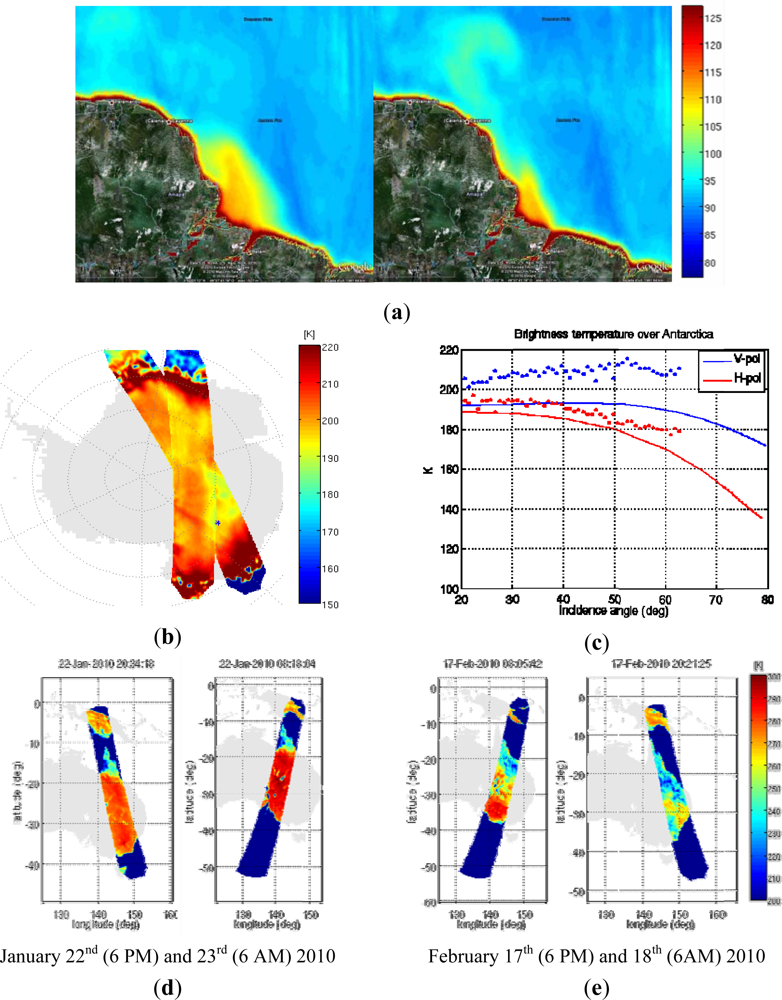
- Macelloni, G.; Brogioni, M.; Pampaloni, P.; Cagnati, A.; Drinkwater, M.R. DOMEX 2004: An experimental campaign at dome-c antarctica for the calibration of spaceborne low-frequency microwave radiometers. IEEE Trans. Geosci. Remote Sens 2006, 44, 2642–2653. [Google Scholar]
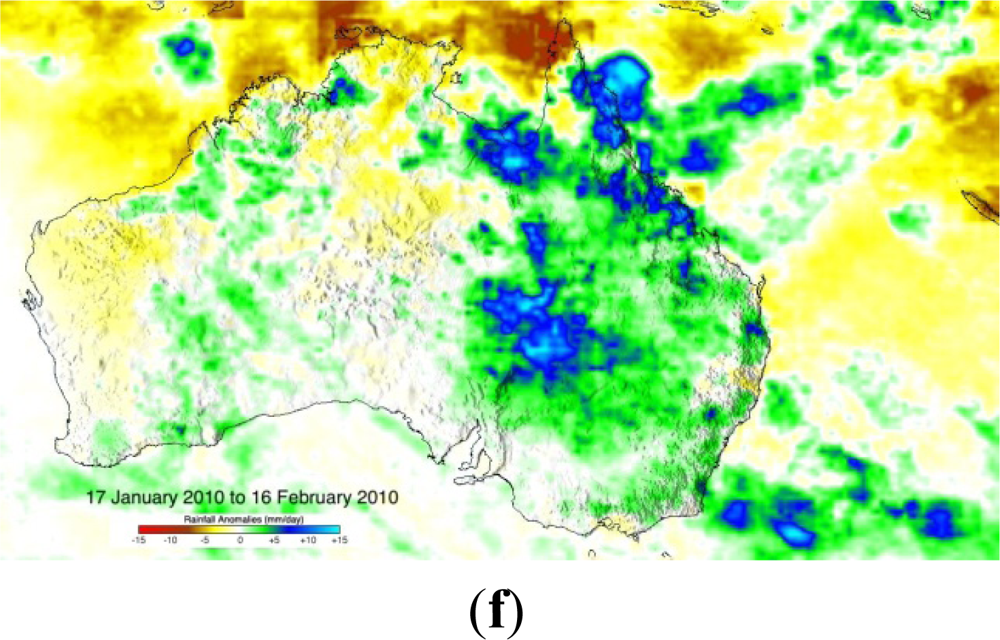
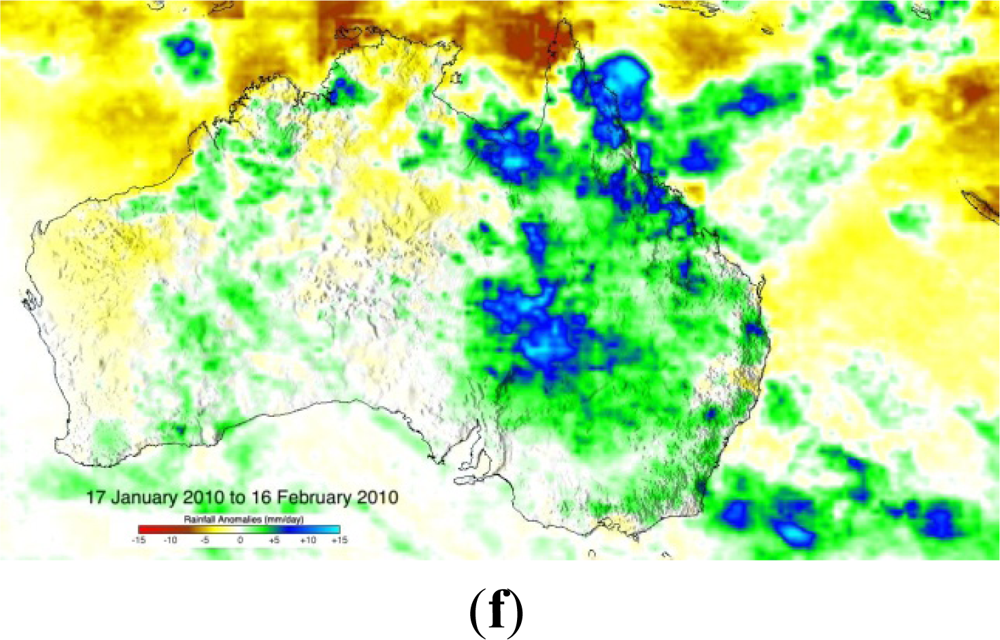
- TRMM Mission. Available online: http://trmm.gsfc.nasa.gov/publications_dir/17jan-16feb10_anomaly.html (accessed on 5 March 2012).
- Le Vine, D.M.; Haken, M. RFI at L-Band in Synthetic Aperture Radiometers. Proceedings of the 2003 IEEE Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; pp. 1742–1744.
- Skou, N.; Misra, S.; Balling, J.; Kristensen, S.; Sobjaerg, S. L-Band RFI as experienced during airborne campaigns in preparation for SMOS. IEEE Trans. Geosci. Remote Sens 2010, 48, 1398–1407. [Google Scholar]
- Oliva, R.; Daganzo, E.; Kerr, Y.; Mecklenburg, S.; Nieto, S.; Richaume, P.; Gruhier, C. SMOS RF interference scenario: Status and actions taken to improve the RFI environment in the 1400–1427 MHz passive band. IEEE Trans. Geosci. Remote Sens, 2012; submitted. [Google Scholar]
- Camps, A.; Gourrion, J.; Tarongí, J.M.; Gutiérrez, A.; Barbosa, J.; Castro, R. RFI Analysis in SMOS Imagery. Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 2007–2010.
- Camps, A.; Vall-llossera, M.; Duffo, N.; Zapata, M.; Corbella, I.; Torres, F.; Barrena, V. Sun effects in 2D aperture synthesis radiometry imaging and their cancellation. IEEE Trans. Geosci. Remote Sens 2004, 42, 1161–1167. [Google Scholar]
- Camps, A.; Vall-llossera, M.; Reul, N.; Torres, F.; Duffo, N.; Corbella, I. Impact and Compensation of Diffuse Sun Scattering in 2D Aperture Synthesis Radiometers Imagery. Proceedings of the 2005 IEEE International Geoscience and Remote Sensing Symposium, Seoul, Korea, 25–29 July 2005; pp. 4906–4909.
- Martin-Neira, M.; Ribo, S.; Martin-Polegre, J. Polarimetric mode of MIRAS. IEEE Trans. Geosci. Remote Sens 2002, 40, 1755–1768. [Google Scholar]
- Camps, A.; Gourrion, J.; Tarongí, J.M.; Vall-llossera, M.; Gutiérrez, A.; Barbosa, J.; Castro, R. Radio-frequency interference detection and mitigation in synthetic aperture radiometers. Algorithms 2011, 4, 155–182. [Google Scholar]
- Font, J.; Lagerloef, G.; LeVine, D.; Camps, A.; Zanife, O.Z. The determination of surface salinity with the european SMOS space mission. IEEE Trans. Geosci. Remote Sens 2004, 42, 2196–2205. [Google Scholar]
- Camps, A.; Font, J.; Vall-llossera, M.; Corbella, I.; Duffo, N.; Torres, F.; Blanch, S.; Aguasca, A.; Villarino, R.; Gabarró, C.; et al. Determination of the sea surface emissivity at L-band and application to smos salinity retrieval algorithms: Review of the contributions of the UPC-ICM. Radio Sci 2008. [Google Scholar] [CrossRef]
- Rautiainen, K.; Kainulainen, J.; Auer, T.; Pihlflyckt, J.; Kettunen, J.; Hallikainen, M. Helsinki university of technology L-band airborne synthetic aperture radiometer. IEEE Trans. Geosci. Remote Sens 2008, 46, 717–726. [Google Scholar]
- Camps, A.; Vall.llossera, M.; Batres, L.; Duffo, N.; Torres, F.; Corbella, I. Retrieving sea surface salinity with multi-angular L-band brightness temperatures: Improvement by spatio-temporal averaging. Radio Sci 2005. [Google Scholar] [CrossRef]
- Talone, M.; Camps, A.; Sabia, R.; Font, J. Towards a Coherent Sea Surface Salinity Product from SMOS Radiometric Measurements and Argo Buoys. Proceedings of the 2007 IEEE International Geoscience and Remote Sensing, Barcelona, Spain, 23–28 July 2007; pp. 3959–3962.
- Talone, M.; Sabia, R.; Camps, A.; Vall-llossera, M.; Gabarró, C.; Font, J. Sea surface salinity retrievals from HUT-2D L-band radiometric measurements. Remote Sens. Environ 2010, 114, 1756–1764. [Google Scholar]
- Kainulainen, J.; Colliander, A.; Closa, J.; Martin-Neira, M.; Oliva, R.; Buenadicha, G.; Rubiales, P.; Hakkarainen, A.; Hallikainen, M. Radiometric performance of the SMOS reference radiometers: Assessment after one year of operation. IEEE Trans. Geosci. Remote Sens 2012. submitted.. [Google Scholar]
- Tenerelli, J.E.; Reul, N.; Mouche, A.A.; Chapron, B. Earth-viewing L-band radiometer sensing of sea surface scattered celestial sky radiation-Part I: General characteristics. IEEE Trans. Geosci. Remote Sens 2008, 46, 659–674. [Google Scholar]
- Reul, N.; Tenerelli, J.E.; Floury, N.; Chapron, B. Earth-viewing L-band radiometer sensing of sea surface scattered celestial sky radiation-Part II: Application to SMOS. IEEE Trans. Geosci. Remote Sens 2008, 46, 675–688. [Google Scholar]
- Reul, N.; Tenerelli, J.; Chapron, B.; Waldteufel, P. Modeling sun glitter at L-band for the sea surface salinity remote sensing with SMOS. IEEE Trans. Geosci. Remote Sens 2007, 45, 2073–2087. [Google Scholar]
- Anterrieu, E. On the reduction of the reconstruction bias in synthetic aperture imaging radiometry. IEEE Trans. Geosci. Remote Sens 2007, 45, 1084–1093. [Google Scholar]
- Klein, L.A.; Swift, C.T. An improved model for the dielectric constant of sea water at microwave frequencies. IEEE Trans. Antennas Propag 1977, 25, 104–111. [Google Scholar]
- Ellison, W.; Balana, A.; Delbos, G.; Lamkaouchi, K.; Eymard, L.; Guillou, C.; Prigent, C. New permittivity measurements of seawater. Radio Sci 1998, 33, 639–648. [Google Scholar]
- Blanch, S.; Aguasca, A. Seawater dielectric permittivity model from measurements at L-band. Proceedings of the 2004 IEEE International Geoscience and Remote Sensing, Anchorage, AK, USA, 23–28 July 2004; pp. 3959–3962.
- Lang, R.; Gu, S.; Jin, Y.; Utku, C.; LeVine, D.M. New Dielectric Model Function for Seawater at L band: Recent Results and Future Plans. Proceedings of the 2010 Aquarius/SAC-D Science Team Meeting, Seattle, WA, USA, 19–21 July, 2010.
- Boutin, J.; Waldteufel, P.; Martin, N.; Caudal, G.; Dinnat, E. Surface salinity retrieved from SMOS measurements over the global ocean: Imprecisions due to sea surface roughness and temperature uncertainties. J. Atmos. Ocean. Technol 2004, 21, 1432–1447. [Google Scholar]
- Talone, M.; Gourrion, J.; Sabia, R.; Gabarroì, C.; González, V.; Camps, A.; Corbella, I.; Monerris, A.; Font, J. SMOS’ Brightness Temperatures Validation: First Results after the Commisioning Phase. Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 4306–4309.
- Meirold-Mautner, I.; Mugerin, C.; Vergely, J.-L.; Spurgeon, P.; Rouffi, F.; Meskini, N. SMOS ocean salinity performance and TB bias correction. Geophy. Res. Abstr 2009, 11. EGU2009–9856.. [Google Scholar]
- Tenerelli, J.; Reul, N. Analysis of SMOS Brightness Temperatures Obtained from March through May 2010. Proceedings of the ESA Living Planet Symposium 2010, Bergen, Norway, 28 June–2 July 2010. ESA SP-686..
- Talone, M. Contribution to the Soil Moisture and Ocean Salinity (SMOS) Mission Sea Surface Salinity retrieval Algorithm. Ph. D. Thesis, Universitat Politècnica de Catalunya, Barcelona, Spain, 2010; Available online: http://www.tdx.cat/handle/10803/48633 (accessed on 5 March 2012).
- Antonov, J.I.; Locarnini, R.A.; Boyer, T.P.; Mishonov, A.V.; Garcia, H.E. World Ocean Atlas 2005, Volume 2: Salinity; Levitus, S., Ed.; NOAA Atlas NESDIS 62; USA Government Printing Office: Washington, DC, USA, 2006; p. 182. [Google Scholar]
- Gourrion, J.; Sabia, R.; Portabella, M.; Tenerelli, J.; Guimbard, S.; Camps, A. Characterization of the SMOS instrumental error pattern correction over the ocean. IEEE Geosci. Remote Sens. Lett 2012. [Google Scholar] [CrossRef]
- Guimbard, S.; Gourrion, J.; Portabella, M.; Turiel, A.; Gabarró, C.; Font, J. SMOS semi-empirical ocean forward model adjustment. IEEE Trans. Geosci. Remote Sens, 2012; submitted. [Google Scholar]
- Torres, F.; Corbella, I.; Duffo, N.; Lin, W.; Gourrion, J.; Font, J.; Martín-Neira, M. Minimization of image distortion in SMOS brightness temperature maps over the ocean. IEEE Geosci. Remote Sens. Lett 2012, 9, 18–22. [Google Scholar]
- Srokosz, M.A. Ocean Surface Salinity-the Why, What and Whether. Proceedings of the Consultative Meeting on Soil Moisture and Ocean Salinity Measurement Requirements and Radiometer Techniques (SMOS), Noordwijk, The Netherlands, 20–21 April 1995; pp. 49–56, ESA WPP-87..
- Boutin, J.; Martin, N. ARGO upper salinity measurements: Perspectives for L-band radiometers calibration and retrieved sea surface salinity validation. IEEE Geosci. Remote Sens. Lett 2006, 3, 202–206. [Google Scholar]
- Salvador, J.; Fernández, P.; Julià, A.; Font, J.; Pelegrí, J.L. A New Buoy for Measurement and Real Time Transmission of Surface Salinity. Proceedings of the 39th CIESM Congress, Venice, Italy, 10–14 May 2010.
- de la Fuente, P.; Talone, M.; Marrasé, C.; Romera, C.; Pelegrí, J.L. The Amazon river plume as viewed from remotely sensed and in situ acquisitions. IEEE Trans. Geosci. Remote Sens. (submitted).
- Kalman, R.E.; Bucy, R.S. A new approach to linear filtering and prediction problems. Trans. ASME–J. Basic Eng 1960, 82, 35–45. [Google Scholar]
- Roullet, G.; Madec, G. Salt conservation, free surface and varying levels: A new formulation for ocean general circulation models. J. Geophy. Res 2000, 105, 23927–23942. [Google Scholar] [CrossRef]
- Mourre, B.; Ballabrera-Poy, J.; García-Ladona, E.; Font, J. Surface salinity response to changes in the model parameter and forcings in a climatological simulation of the eastern North-Atlantic Ocean. Ocean Model 2008, 23, 21–32. [Google Scholar]
- Mourre, B.; Ballabrera-Poy, J. Salinity model errors induced by wind stress uncertainties in the Macaronesian region. Ocean Model 2009, 29, 213–221. [Google Scholar]
- Merlin, O.; Walker, J.P.; Chehbouni, A.; Kerr, Y. Towards deterministic downscaling of SMOS soil moisture using MODIS derived soil evaporative efficiency. Remote Sens. Environ 2008, 112, 3935–3946. [Google Scholar] [Green Version]
- Acevo-Herrera, R.; Aguasca, A.; Bosch-Lluis, X.; Camps, A.; Martínez-Fernández, J.; Sánchez-Martín, N.; Pérez-Gutiérrez, C. Design and first results of an uav-borne L-band radiometer for multiple monitoring purposes. Remote Sens 2010, 2, 1662–1679. [Google Scholar]
- Carlson, T. An overview of the ‘triangle method’ for estimating surface evapotranspiration and soil moisture from satellite Imagery. Sensors 2007, 7, 1612–1629. [Google Scholar]
- Piles, M. Multiscale Soil Moisture Retrievals from Microwave Remote Sensing Observations. Ph. D. Thesis, Universitat Politècnica de Catalunya, Barcelona, Spain, 2010. Available online: http://www.tdx.cat/handle/10803/77910 (accessed on 5 March 2012).
- Piles, M.; Camps, A.; Vall-llossera, M.; Corbella, I.; Panciera, R.; Rudiger, C.; Kerr, Y.; Walker, J. Downscaling SMOS-derived soil moisture using MODIS visible/infrared data. IEEE Trans. Geosci. Remote Sens 2011, 49, 3156–3166. [Google Scholar]
- Valencia, E.; Camps, A.; Marchan-Hernandez, J.F.; Rodriguez-Alvarez, N.; Ramos-Perez, I.; Bosch-Lluis, X. Experimental determination of the sea correlation time using GNSS-R coherent data. IEEE Geosci. Remote Sens. Lett 2010, 7, 675–679. [Google Scholar]
- Valencia, E.; Camps, A.; Bosch-Lluis, X.; Rodríguez-Álvarez, N.; Ramos-Perez, I.; Marchan-Hernandez, J.F.; Eugenio, F.; Marcello, J. On the use of GNSS-R DATA TO Correct L-band brightness temperatures for sea state effects: Results of the ALBATROSS field Experiments. IEEE Trans. Geosci. Remote Sens 2011, 49, 3225–3235. [Google Scholar]
- Delwart, S.; Bouzinac, C.; Wursteisen, P.; Berger, M.; Drinkwater, M.; Martín-Neira, M.; Kerr, Y. SMOS validation and COSMOS campaigns. IEEE Trans. Geosci. Remote Sens 2008, 46, 695–704. [Google Scholar]
- Valencia, E.; Camps, A.; Rodriguez-Alvarez, N.; Ramos-Perez, I.; Bosch-Lluis, X.; Park, H. Improving the accuracy of sea surface salinity retrieval using GNSS-R data to correct the sea state effect. Radio Sci 2011, 46, RS0C02. [Google Scholar] [CrossRef]
- Valencia, E.; Camps, A.; Marchán-Hernandez, J.F.; Bosch-Lluis, X.; Rodríguez-Álvarez, N.; Ramos-Pérez, I. Advanced architectures for real time delay-doppler map GNSS-reflectometers: the GPS reflectometer instrument for PAU (griPAU). Adv. Space Res 2010, 46, 196–207. [Google Scholar]
- Nogués, O.; Cardellach, E.; Sanz Campderros, J.; Rius, A.A. GPS-reflections receiver that computes doppler/delay maps in real time. IEEE Trans. Geosci. Remote Sens 2007, 45, 156–174. [Google Scholar]
- Camps, A.; Font, J.; Vall-llossera, M.; Gabarró, C.; Corbella, I.; Duffo, N.; Torres, F.; Blanch, S.; Aguasca, A.; Villarino, R.; et al. The WISE 2000 and 2001 field experiments in support of the SMOS mission: Sea surface L-band brightness temperature observations and their application to multi-angular salinity retrieval. IEEE Trans. Geosci. Remote Sens 2004, 42, 804–823. [Google Scholar]
- Rodriguez-Alvarez, N.; Camps, A.; Vall-llossera, M.; Bosch-Lluis, X.; Monerris, A.; Ramos-Perez, I.; Valencia, E.; Marchan-Hernandez, J.F. Land geophysical parameters retrieval using the interference pattern GNSS-R technique. IEEE Trans. Geosci. Remote Sens 2011, 49, 71–84. [Google Scholar]
- Valencia, E.; Camps, A.; Vall-llossera, M.; Monerris, A.; Bosch-Lluis, X.; Rodriguez-Alvarez, N.; Ramos-Perez, I.; Marchan-Hernandez, J.F.; Martinez-Fernandez, J.; Sanchez-Martin, N.; et al. GNSS-R Delay-Doppler Maps over Land: Preliminary Results of the GRAJO Field Experiment. Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 3805–3808.
- Delta-T Devices. Available online: http://www.delta-t.co.uk/product-display.asp?id=ML2x%20Product&div=Soil%20Science (accessed on 5 March 2011).
- Spurgeon, P.; Font, J.; Boutin, J.; Reul, N.; Tenerelli, J.; Vergely, J.L.; Gabaro, C.; Yin, X.; Lavender, S.; Chuprin, A.; et al. Ocean Salinity Retrieval Approaches for the SMOS Satellite. Proceedings of the ESA Living Planet Symposium, Bergen, Norway, June 28–July 2 2010. ESA Special Publication SP-686..


















Share and Cite
Camps, A.; Font, J.; Corbella, I.; Vall-Llossera, M.; Portabella, M.; Ballabrera-Poy, J.; González, V.; Piles, M.; Aguasca, A.; Acevo, R.; et al. Review of the CALIMAS Team Contributions to European Space Agency’s Soil Moisture and Ocean Salinity Mission Calibration and Validation. Remote Sens. 2012, 4, 1272-1309. https://doi.org/10.3390/rs4051272
Camps A, Font J, Corbella I, Vall-Llossera M, Portabella M, Ballabrera-Poy J, González V, Piles M, Aguasca A, Acevo R, et al. Review of the CALIMAS Team Contributions to European Space Agency’s Soil Moisture and Ocean Salinity Mission Calibration and Validation. Remote Sensing. 2012; 4(5):1272-1309. https://doi.org/10.3390/rs4051272
Chicago/Turabian StyleCamps, Adriano, Jordi Font, Ignasi Corbella, Mercedes Vall-Llossera, Marcos Portabella, Joaquim Ballabrera-Poy, Verónica González, María Piles, Albert Aguasca, René Acevo, and et al. 2012. "Review of the CALIMAS Team Contributions to European Space Agency’s Soil Moisture and Ocean Salinity Mission Calibration and Validation" Remote Sensing 4, no. 5: 1272-1309. https://doi.org/10.3390/rs4051272