A Merging Algorithm for Regional Snow Mapping over Eastern Canada from AVHRR and SSM/I Data


Abstract
:1. Introduction
2. Methods
2.1 AVHRR Snow Mapping Algorithm
2.2. SSM/I Snow Mapping Algorithm
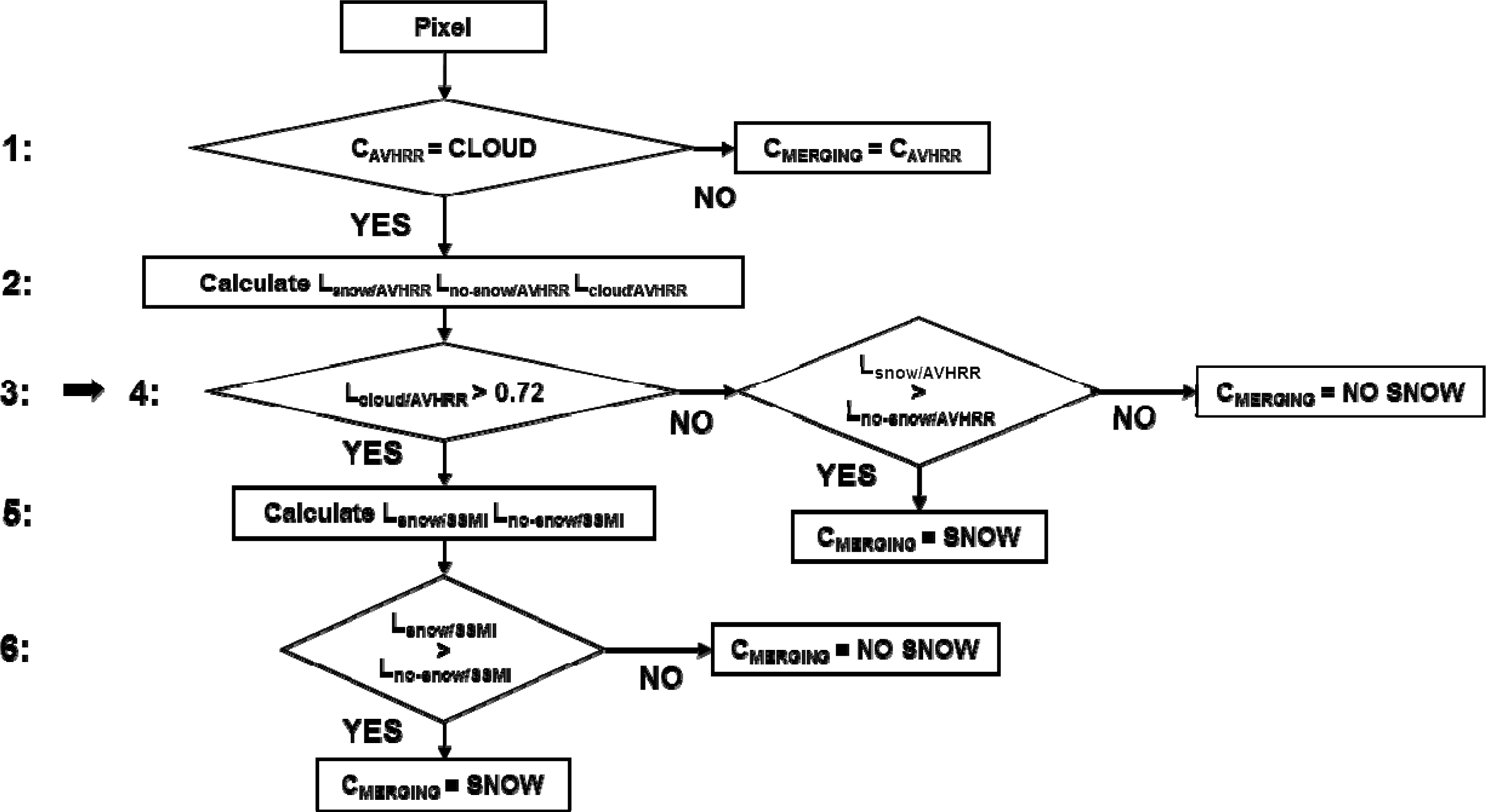
2.3. Procedure for Merging Daily AVHRR and SSM/I Snow Maps
3. Results and Discussion
3.1. Accuracy Assessment of Snow Maps from the AVHRR Algorithm
3.2. Accuracy Assessment of Snow Maps from the SSM/I Algorithm
3.3. Accuracy Assessment of the Merging Algorithm
- (1).
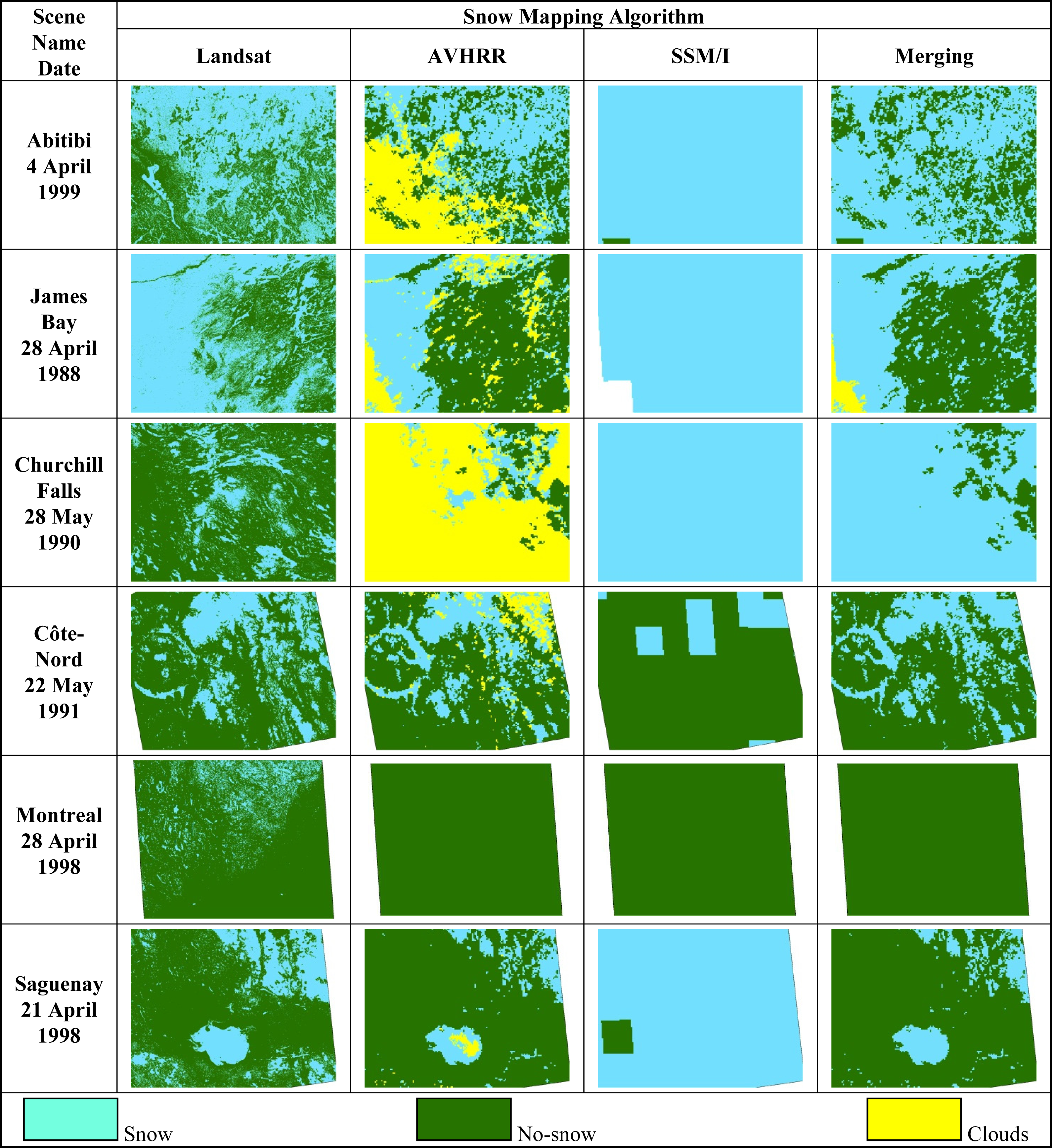
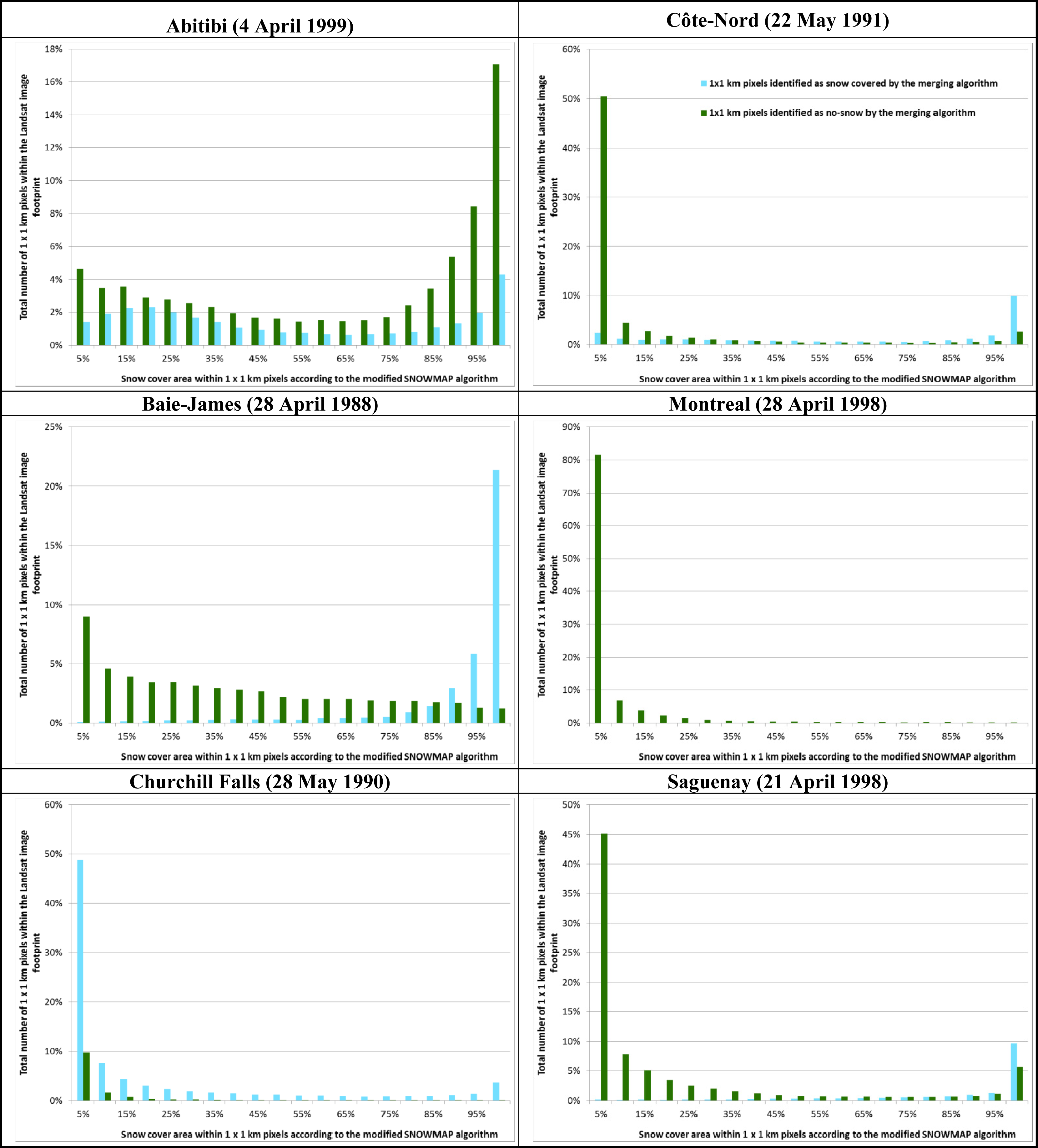
- When the AVHRR scenes are dominated by clouds (Figure 6: Abitibi and Churchill Falls), the merging algorithm tends to overestimate the presence of snow. This corroborates the 19% commission error reported in Table 6. The greater the cloud cover, the greater the error. For the Abitibi and Churchill Falls scenes, snow cover was overestimated by about 12% and 48%, respectively (Table 8). For these two scenes, the snow maps produced by the merging algorithm for cloud-free areas, which, in fact, comes from the AVHRR algorithm, were similar to the high-resolution maps from Landsat imagery (considered as reference data). By contrast, cloud-covered areas were mostly filled by the map derived from the SSM/I algorithm, which, unlike the reference maps, detected snow for both of the two scenes.
- (2).
- Under the cloud-free conditions, where the maps produced by the merging algorithm were derived from the AVHRR algorithm, snow cover extent was underestimated over certain scenes: James Bay (−22%), Saguenay (−13%) and Montreal (−4%) (Table 8). These were areas of discontinuous snow cover (see corresponding reference map: the central part of the James Bay scene, the northern part of the Montreal scene and the southern part of the Saguenay scene). This partly explains the merging algorithm’s omission error for snow detection (Table 6). In the absence of discontinuous snow cover, as in the Côte-Nord scene (Figure 6), the results of the merging algorithm are consistent with snow cover maps from Landsat imagery. The difference between the two snow cover extents was about 2% (Table 8).
4. Conclusions
Acknowledgments
Conflict of Interest
References and Notes
- Simic, A.; Fernandes, R.; Brown, R.; Romanov, P.; Park, W. Validation of VEGETATION, MODIS, and GOES+SSM/I snow cover products over Canada based on surface snow depth observations. Hydrol. Process 2004, 18, 1089–1104. [Google Scholar]
- Frei, A. A new generation of satellite snow observations for large scale earth system studies. Geogr. Compass 2009, 3, 879–902. [Google Scholar]
- Chen, C.; Lakhankar, T.; Romanov, P.; Helfrich, S.; Powell, A.; Khanbilvardi, R. Validation of NOAA-interactive multisensor snow and Ice Mapping System (IMS) by comparison with ground-based measurements over continental United States. Remote Sens 2012, 4, 1134–1145. [Google Scholar]
- Ramsay, B.H. The interactive multisensor snow and ice mapping system. Hydrol. Process 1998, 12, 1537–1546. [Google Scholar]
- Romanov, P.; Gutman, G.; Csisar, I. Automated monitoring of snow cover over North America with multispectral satellite data. J. Appl. Meteorol 2000, 39, 1866–1880. [Google Scholar]
- Bitner, D.; Carroll, T.; Cline, D.; Romanov, P. An assessment of the differences between three satellite snow cover mapping techniques. Hydrol. Process 2002, 16, 3723–3733. [Google Scholar]
- Hall, D.K.; Rhoads, J.D.; Salomonson, V.V. Development of methods for mapping global snow cover using Moderate Resolution Imaging Spectroradiometer data. Remote Sens. Environ 1995, 54, 127–140. [Google Scholar]
- Hall, D.K.; Riggs, G.A.; Salomonson, V.V.; DiGirolamo, N.E.; Bayr, K.J. MODIS snow-cover products. Remote Sens. Environ 2002, 83, 181–194. [Google Scholar]
- Dietz, A.J.; Kuenzer, C.; Gessner, U.; Dech, S. Remote sensing of snow—A review of available methods. Int. J. Remote Sens 2012, 33, 4094–4134. [Google Scholar]
- Notarnicola, C.; Duguay, M.; Moelg, N.; Schellenberger, T.; Tetzlaff, A.; Monsorno, R.; Costa, A.; Steurer, C.; Zebisch, M. Snow cover maps from MODIS images at 250 m resolution, part 1: Algorithm description. Remote Sens 2013, 5, 110–126. [Google Scholar]
- Solberg, R.; Wangensteen, B.; Amlien, J.; Koren, H.; Metsämäki, S.; Nagler, T.; Luojus, K.; Pulliainen, J. A New Global Snow Extent Product Based on ATSR-2 and AATSR. Proceedings of 2010 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 1780–1783.
- Chokmani, K.; Bernier, M.; Gauthier, Y. Suivi spatio-temporel du couvert nival du Québec à l’aide des données NOAA-AVHRR. Revue des Sciences de l'Eau 2006, 19, 163–179. [Google Scholar]
- Chokmani, K.; Bernier, M.; Slivitzky, M. Validation of a method for snow cover extent monitoring over Quebec (Canada) using NOAA-AVHRR data. EARSeL eProc 2005, 4, 106–118. [Google Scholar]
- Langlois, A. Étude de la Variation Spatio-Temporelle du Couvert Nival par Télédétection Micro-Ondes Passives et Validation du Modèle Régional Canadien du Climat (MRCC). Université de Sherbrooke, Sherbrooke, QC, Canada, 2003. [Google Scholar]
- Langlois, A.; Royer, A.; Fillol, E.; Frigon, A.; Laprise, R. Evaluation of the snow cover variation in the Canadian regional climate model over eastern Canada using passive microwave satellite data. Hydrol. Process 2004, 18, 1127–1138. [Google Scholar]
- Caya, D.; Laprise, R. A semi-implicit semi-lagrangian regional climate model: The Canadian RCM. Mon. Wea. Rev 1999, 127, 341–362. [Google Scholar]
- Liang, T.; Zhang, X.; Xie, H.; Wu, C.; Feng, Q.; Huang, X.; Chen, Q. Toward improved daily snow cover mapping with advanced combination of MODIS and AMSR-E measurements. Remote Sens. Environ 2008, 112, 3750–3761. [Google Scholar]
- Gao, Y.; Xie, H.; Lu, N.; Yao, T.; Liang, T. Toward advanced daily cloud-free snow cover and snow water equivalent products from Terra-Aqua MODIS and Aqua AMSR-E measurements. J. Hydrol 2010, 385, 23–35. [Google Scholar]
- Cordisco, E.; Prigent, C.; Aires, F. Sensitivity of Satellite Observations to Snow Characteristics. Proceedings of 2003 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Toulouse, France, 21–25 July 2003.
- Koskinen, J.; Metsamaki, S.; Grandell, J.; Janne, S.; Matikainen, L.; Hallikainen, M. Snow monitoring using radar and optical satellite data. Remote Sens. Environ 1999, 69, 16–29. [Google Scholar]
- Tait, A.; Barton, J.S.; Hall, D.K. A prototype MODIS-SSM/I snow-mapping algorithm. Int. J. Remote Sens 2001, 22, 3275–3284. [Google Scholar]
- Brodzik, M.J.; Armstrong, R.L.; Savoie, M. Global EASE-Grid 8-Day Blended SSM/I and MODIS Snow Cover; National Snow and Ice Data Center: Boulder, CO, USA, 2007. [Google Scholar]
- Latifovic, R.; Trishchenko, A.P.; Chen, J.; Park, W.B.; Khlopenkov, K.V.; Fernandes, R.; Pouliot, D.; Ungureanu, C.; Luo, Y.; Wang, S.; et al. Generating historical AVHRR 1 km baseline satellite data records over Canada suitable for climate change studies. Can. J. Remote Sens 2005, 31, 324–346. [Google Scholar]
- Voigt, S.; Koch, M.; Baumgartner, M.F. A multichannel threshold technique for NOAA AVHRR data to monitor the extent of snow cover in the Swiss Alps. IAHS-AISH Publ 1999, 256, 35–43. [Google Scholar]
- Chokmani, K.; Bernier, M.; Beaulieu, V.; Philippin, M.; Slivitzky, M. Suivi Spatio-Temporel du Couvert Nival à l’Aide des Données NOAA-AVHRR; R-719; Institut National de la Recherche Scientifique-Eau, Terre et Environnement: Québec, QC, Canada, 2004; p. 73. [Google Scholar]
- Mialon, A.; Fily, M.; Roy, A. Seasonal snow cover extent from microwave remote sensing data: Comparison with existing ground and satellite based measurements. EARSeL eProc 2005, 4, 215–225. [Google Scholar]
- Côté, J.; Gravel, S.; Méthot, A.; Patoine, A.; Roch, M.; Staniforth, A. The operational CMC-MRB global environmental multiscale (GEM) model. Part I: Design considerations and formulation. Mon. Wea. Rev 1998, 126, 1373–1395. [Google Scholar]
- Royer, A.; Goïta, K.; Kohn, J.; De Sève, D. Monitoring dry, wet, and no-snow conditions from microwave satellite observations. IEEE Geosci. Remote Sens. Lett 2010, 7, 670–674. [Google Scholar]
- Fernandes, R.; Zhao, H. Mapping Daily Snow Cover Extent over Land Surfaces Using NOAA AVHRR Imagery. Proceedings of 5th EARSeL Workshop: Remote Sensing of Land Ice and Snow, Bern, Switzerland, 11–13 February 2008; pp. 1–8.
- Chokmani, K.; Dever, K.; Bernier, M.; Gauthier, Y.; Paquet, L.M. Adaptation of the SNOWMAP algorithm for snow mapping over eastern Canada using Landsat-TM imagery. Hydrol. Sci. J 2010, 55, 649–660. [Google Scholar]
- Hall, D.K.; Riggs, G.A.; Salomonson, V.V. Algorithm Theoretical Basis Document (ATBD) for the MODIS Snow and Sea Ice-Mapping Algorithms. Available online: http://eospso.nasa.gov/sites/default/files/atbd/atbd_mod10.pdf (accessed on 23/10/2013).
- Klein, A.G.; Hall, D.K.; Riggs, G.A. Improving snow cover mapping in forests through the use of a canopy reflectance model. Hydrol. Process 1998, 12, 1723–1744. [Google Scholar]
- Riggs, G.; Hall, D.K. Snow Mapping with the MODIS Aqua Instrument. Proceedings of 61st Eastern Snow Conference, Portland, ME, USA, 9–11 June 2004; pp. 81–84.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Threshold | Threshold as a Function of DOY |
|---|---|
| (1) T4max 99th percentile of T4 from snow calibration pixels |  T4max = 1.68 × 10−3 × DOY2 − 0.21 × DOY + 281.5 |
| (2) T4min 1st percentile of T4 from snow calibration pixels |  T4min = 0.36 × 10−3 × DOY2 + 0.09 × DOY + 247.4 |
| (3) ΔT45max Time independent | ΔT45max = 2 °K |
| (4) NDVImax 99th percentile of NDVI from snow calibration pixels |  NDVImax = 0.13 × 10−3 × DOY2 − 0.03 × DOY + 1.83 |
| (5) ΔT34max 95th percentile of T3–T4 from snow calibration pixels |  ΔT34max = 2.70 × 10−3 × DOY2 − 0.61 ×DOY + 40.97 |
| (6) A1min 1st percentile of A1 from snow calibration pixels |  A1min = −0.05 × 10−3 × DOY2 + 0.01 × DOY −0.36 |
| Total Pixels Used in Validation | Classification | ||||
|---|---|---|---|---|---|
| Snow | No-Snow | Clouds | |||
| Validation | Snow | 62,430 | 93% | 4% | 3% |
| No-snow | 14,533 | 1% | 98% | 1% | |
| Clouds | 62,542 | 0% | 0% | 100% | |
| Overall success rate | 97% | ||||
| Classification | |||||
|---|---|---|---|---|---|
| Snow | No-Snow | Clouds | Total | ||
| Observations | Snow | 1,379 | 215 | 1,594 | |
| No-snow | 174 | 2,061 | 2,235 | ||
| Total | 1,553 | 2,276 | 8,627 | 12,456 | |
| Success rate | Omission Error | Commission Error | |||
| Snow | 87% | 13% | 11% | ||
| No-snow | 92% | 8% | 9% | ||
| Overall success rate | 90% | ||||
| Kappa coefficient | 0.79 | ||||
| a) Initial Version | Classification | ||||
| Snow | No-Snow | Clouds | Total | ||
| Observations | Snow | 222 | 13 | 235 | |
| No-snow | 35 | 168 | 203 | ||
| Total | 257 | 181 | 446 | 884 | |
| Success Rate | Omission Error | Commission Error | |||
| Snow | 94% | 6% | 14% | ||
| No-snow | 83% | 17% | 7% | ||
| Overall success rate | 89% | ||||
| Kappa coefficient | 0.78 | ||||
| b) New version | Classification | ||||
| Snow | No-Snow | Clouds | Total | ||
| Observations | Snow | 136 | 30 | 166 | |
| No-snow | 7 | 177 | 184 | ||
| Total | 143 | 207 | 534 | 884 | |
| Success Rate | Omission Error | Commission Error | |||
| Snow | 82% | 18% | 5% | ||
| No-snow | 96% | 4% | 14% | ||
| Overall success rate | 89% | ||||
| Kappa coefficient | 0.79 | ||||
| Classification | ||||
|---|---|---|---|---|
| Snow | No-Snow | Total | ||
| Observations | Snow | 3,583 | 194 | 3,777 |
| No-snow | 1,413 | 4,286 | 5,699 | |
| Total | 4,996 | 4,480 | 9,476 | |
| Success Rate | Omission Error | Commission Error | ||
| Snow | 95% | 5% | 28% | |
| No-snow | 75% | 25% | 4% | |
| Overall success rate | 83% | |||
| Kappa coefficient | 0.66 | |||
| Classification | ||||
|---|---|---|---|---|
| Snow | No-Snow | Total | ||
| Observations | Snow | 4,721 | 529 | 5,250 |
| No-snow | 1,135 | 5,746 | 6,881 | |
| Total | 5,856 | 6,275 | 12,131 | |
| Success Rate | Omission Error | Commission Error | ||
| Snow | 90% | 10% | 19% | |
| No-snow | 84% | 16% | 8% | |
| Overall success rate | 86% | |||
| Kappa coefficient | 0.72 | |||
| Year | [Estimated DEMS] − [Observed DEMS] (in days) | |
|---|---|---|
| Mean Value | Standard Deviation | |
| 1988 | 5.5 | 13.9 |
| 1989 | 1.6 | 10.6 |
| 1990 | 0.9 | 8.2 |
| 1991 | 5.8 | 7.8 |
| 1992 | 2.1 | 12.2 |
| 1993 | −6.7 | 9.8 |
| 1994 | 1.9 | 8.1 |
| 1995 | −0.2 | 7.1 |
| 1996 | −3.3 | 12.0 |
| 1997 | −2.4 | 11.0 |
| 1998 | −3.6 | 10.1 |
| 1999 | −0.2 | 8.5 |
| All years | −0.1 | 10.7 |
| Scene Name Date |  Landsat Landsat  Merging Merging | Percentage of Landsat Footprint Covered by Snow | |
|---|---|---|---|
| Abitibi 4 April 1999 |  | Landsat | 60% |
| Merging | 72% | ||
| Merging − Landsat | 12% | ||
| Baie-James 28 April 1988 |  | Landsat | 58% |
| Merging | 36% | ||
| Merging − Landsat | −22% | ||
| Churchill Falls 28 May 1990 |  | Landsat | 17% |
| Merging | 65% | ||
| Merging − Landsat | 48% | ||
| Côte-Nord 22 May 1991 |  | Landsat | 27% |
| Merging | 29% | ||
| Merging − Landsat | 2% | ||
| Montreal 28 April 1998 |  | Landsat | 04% |
| Merging | 00% | ||
| Merging − Landsat | −04% | ||
| Saguenay 21 April 1998 |  | Landsat | 31% |
| Merging | 18% | ||
| Merging − Landsat | −13% | ||
© 2013 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Chokmani, K.; Bernier, M.; Royer, A. A Merging Algorithm for Regional Snow Mapping over Eastern Canada from AVHRR and SSM/I Data. Remote Sens. 2013, 5, 5463-5487. https://doi.org/10.3390/rs5115463
Chokmani K, Bernier M, Royer A. A Merging Algorithm for Regional Snow Mapping over Eastern Canada from AVHRR and SSM/I Data. Remote Sensing. 2013; 5(11):5463-5487. https://doi.org/10.3390/rs5115463
Chicago/Turabian StyleChokmani, Karem, Monique Bernier, and Alain Royer. 2013. "A Merging Algorithm for Regional Snow Mapping over Eastern Canada from AVHRR and SSM/I Data" Remote Sensing 5, no. 11: 5463-5487. https://doi.org/10.3390/rs5115463