Quantifying Dynamics in Tropical Peat Swamp Forest Biomass with Multi-Temporal LiDAR Datasets

Abstract
:1. Introduction
2. Materials and Methods
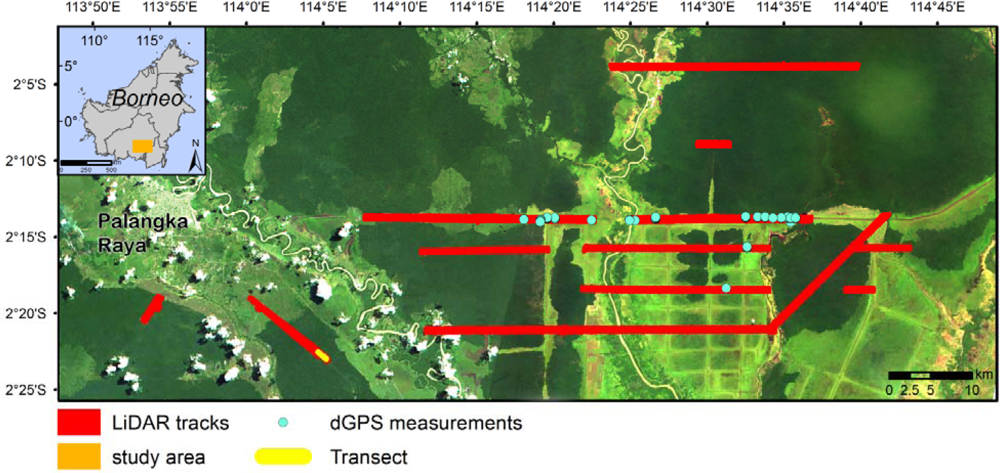
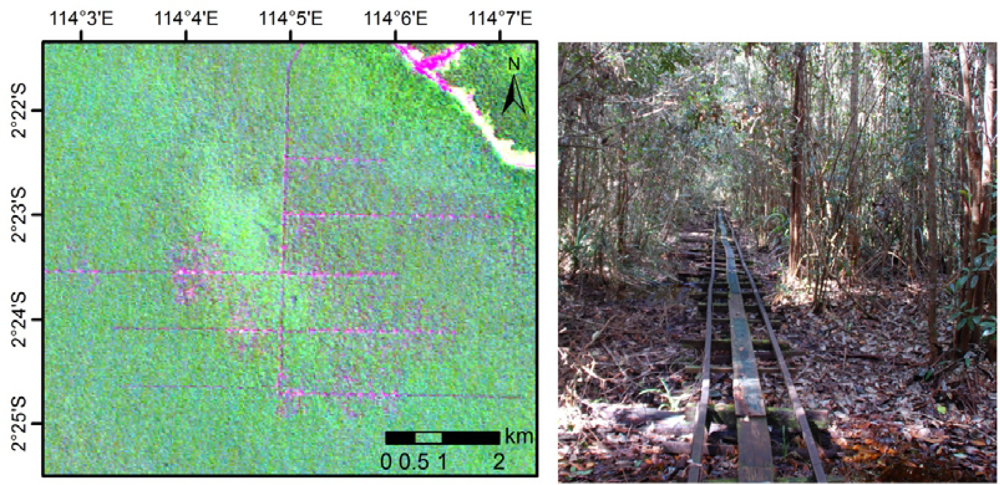
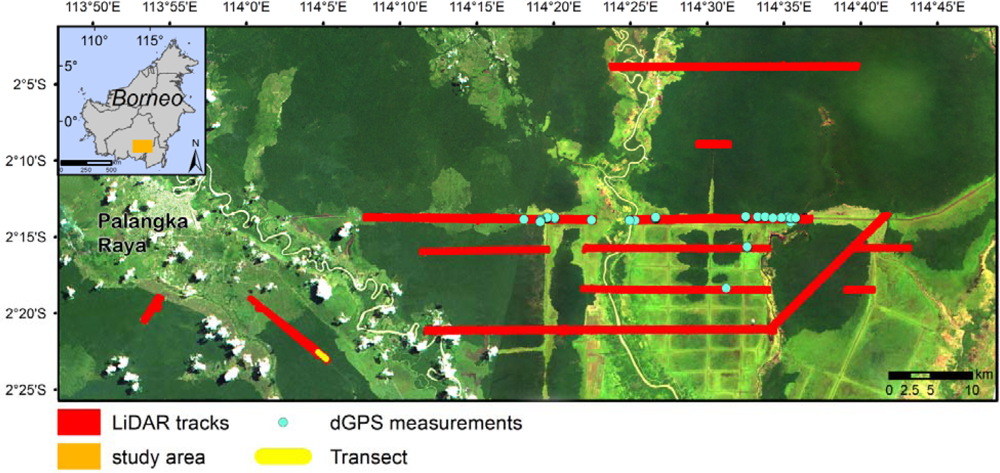
2.1. Study Site
2.2. Data
2.2.1. Field Inventory Data
2.2.2. LiDAR Data
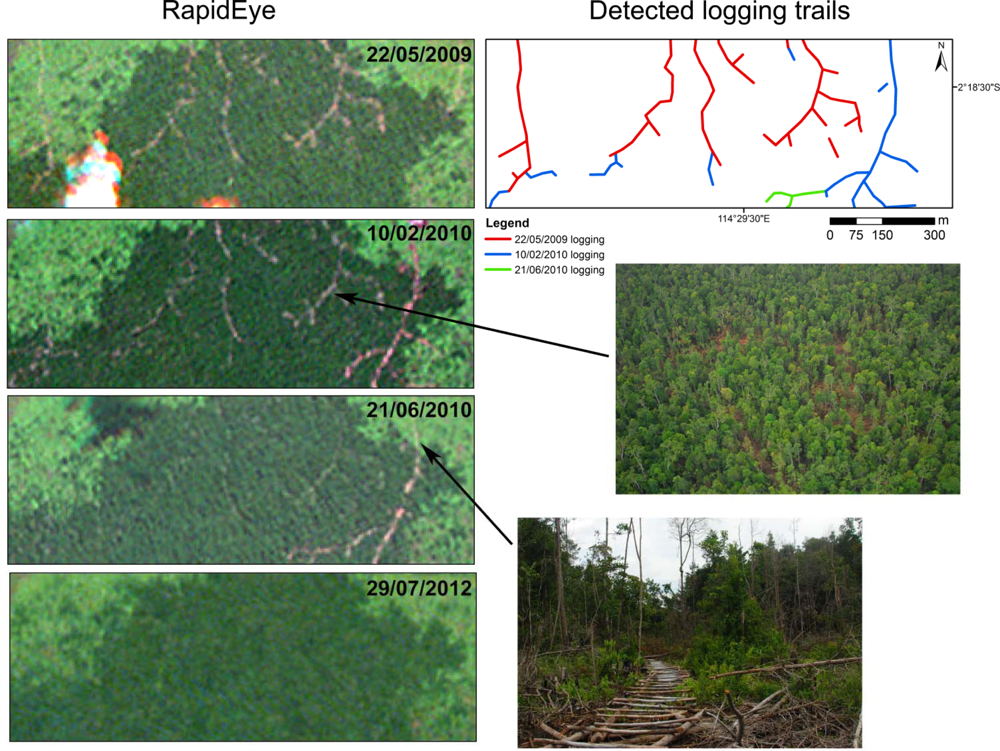
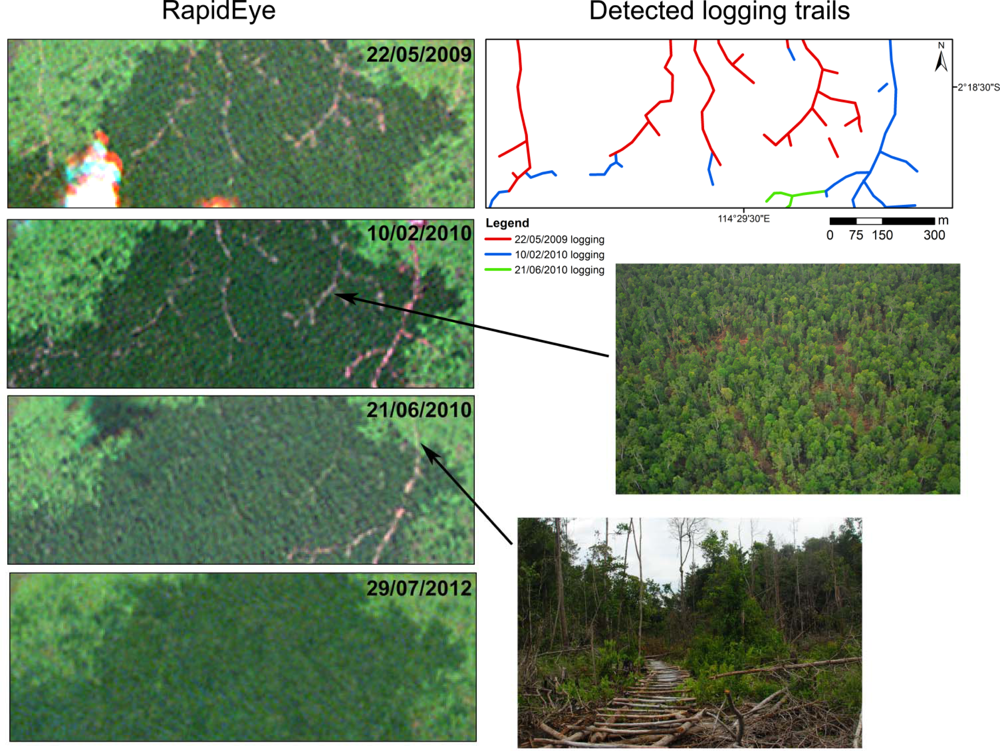
2.2.3. Multispectral Imagery
2.3. Data Analysis
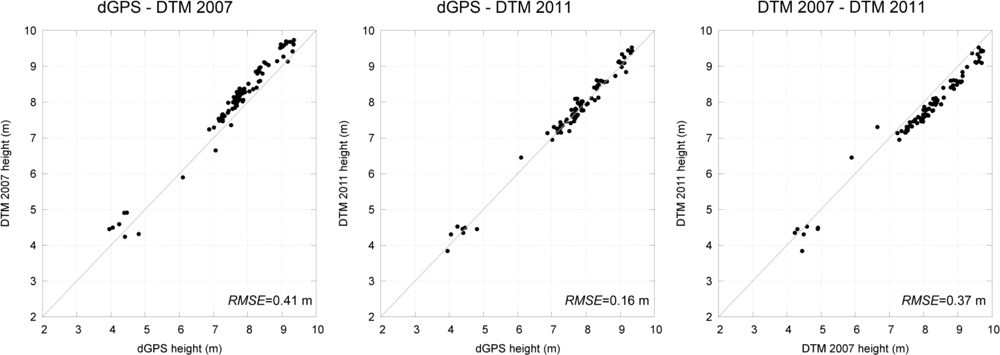
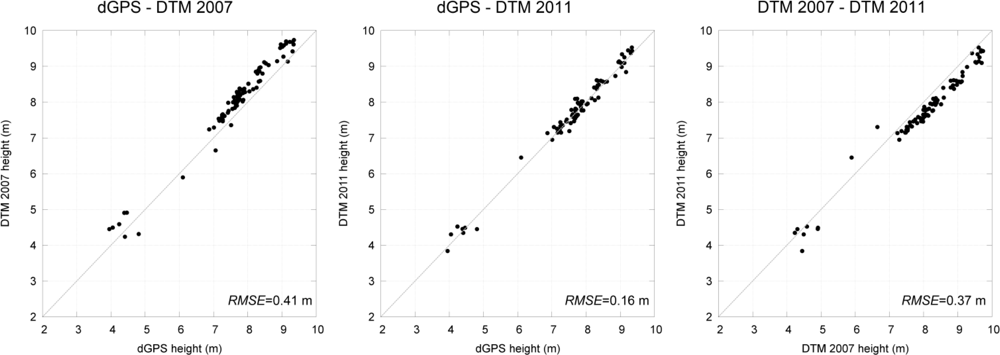
2.3.1. LiDAR Filtering and DTM Generation
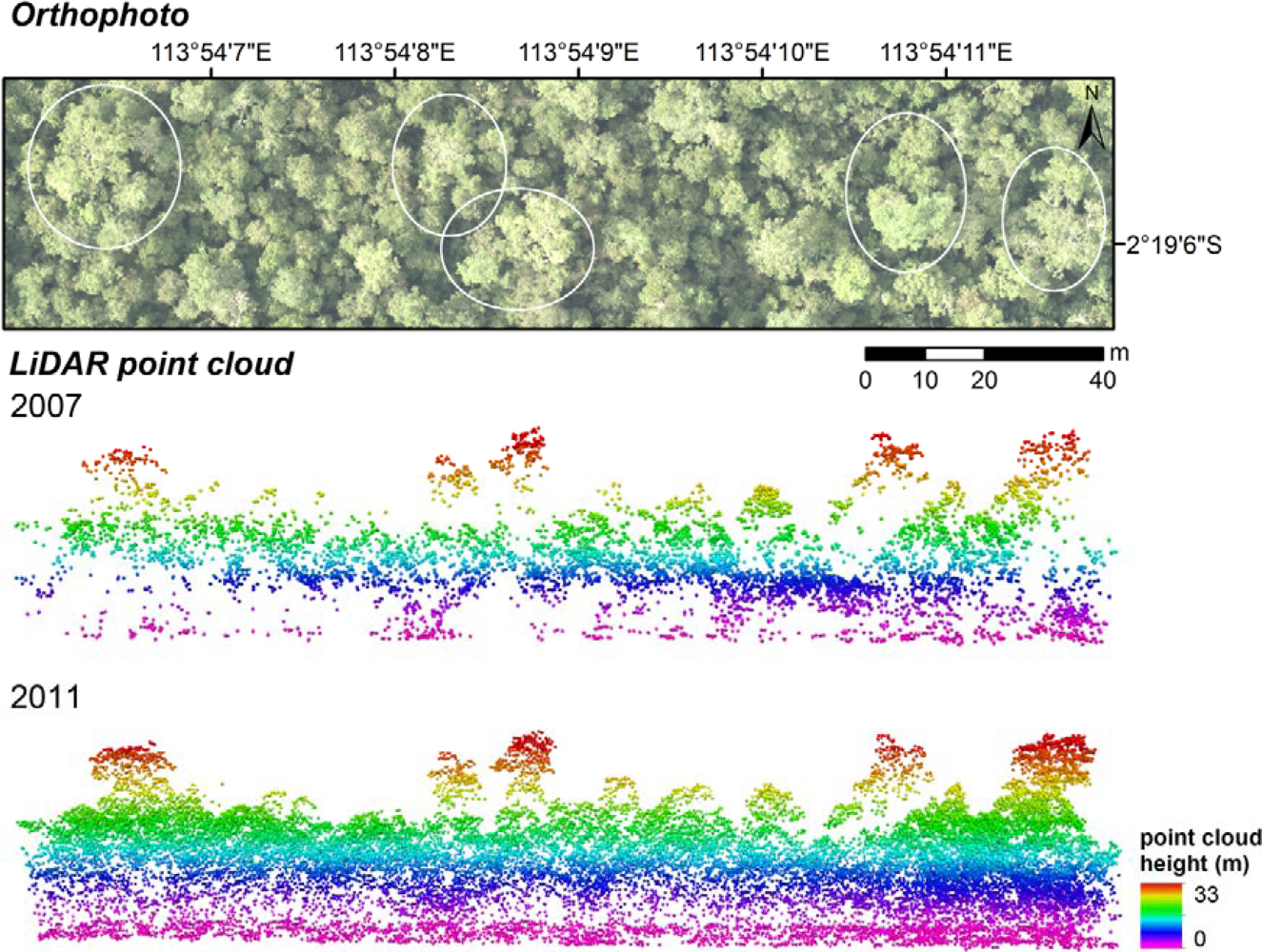
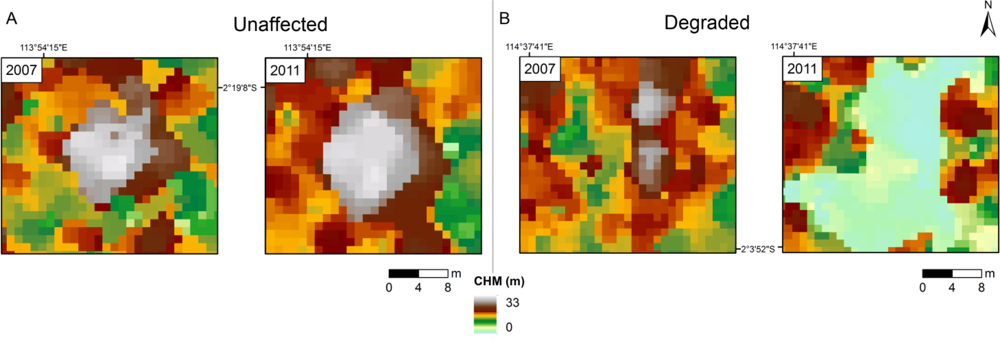
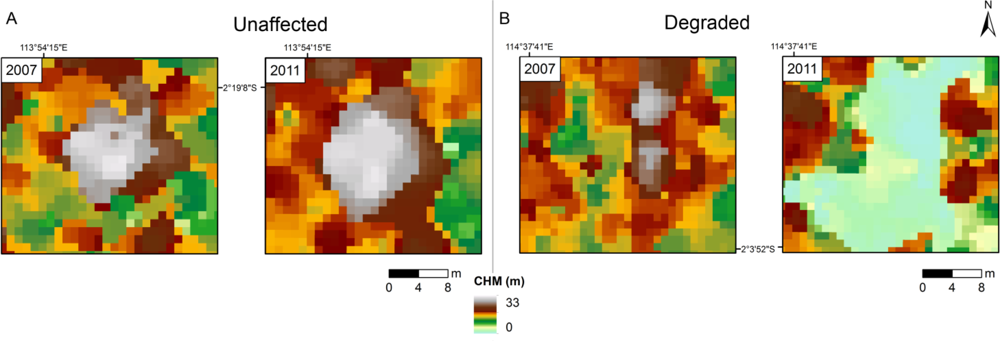
2.3.2. Canopy Height Models
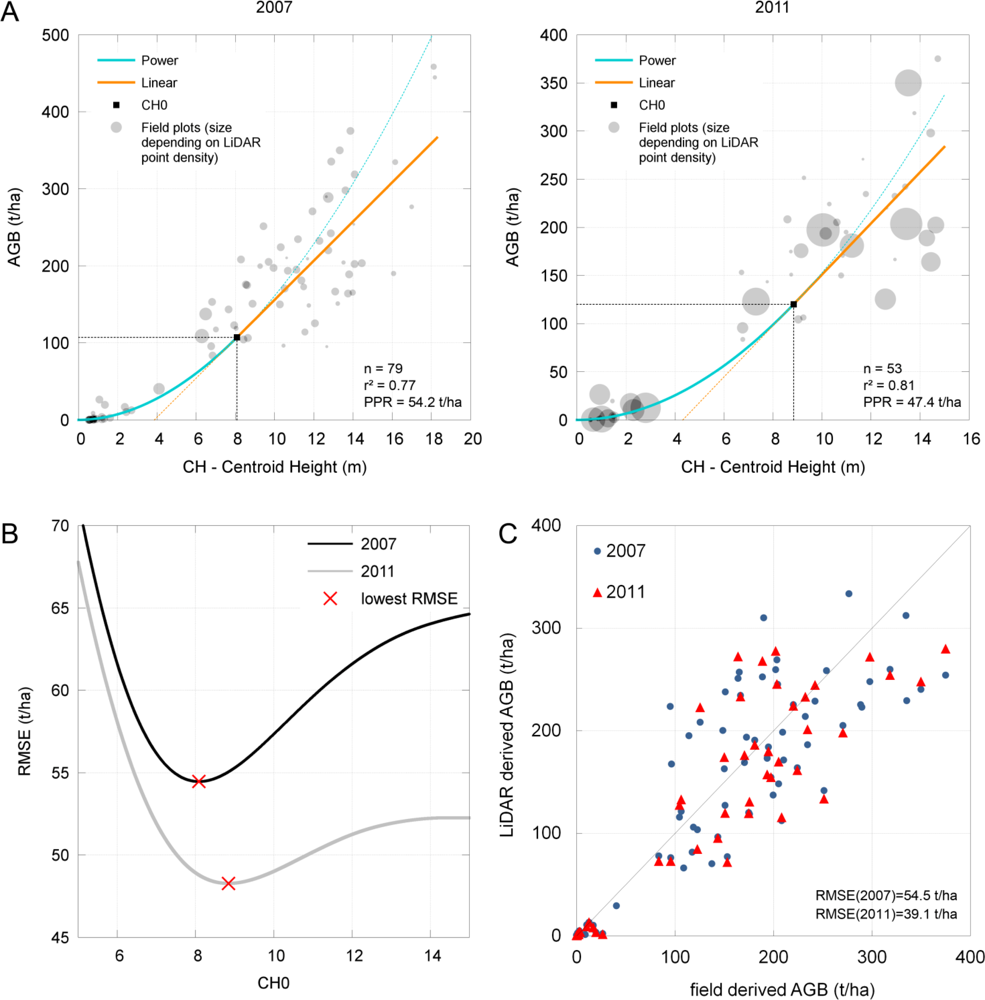
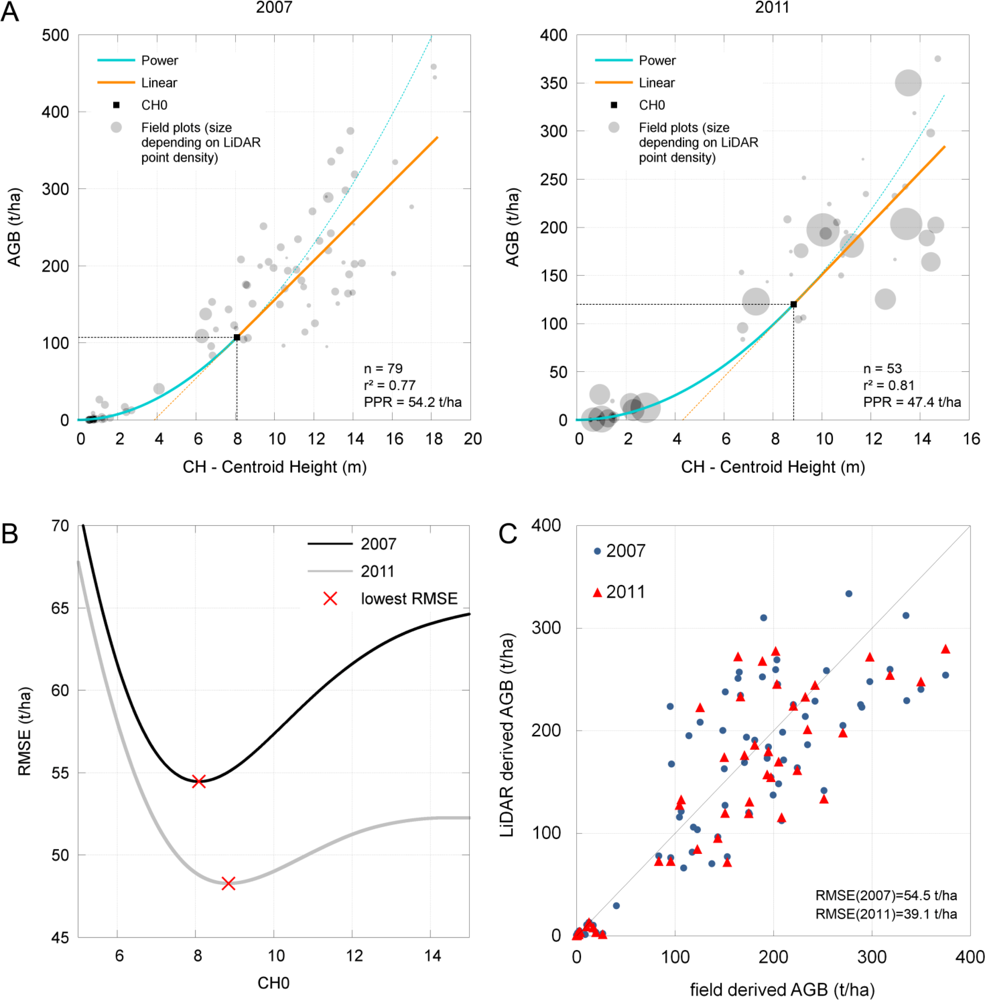
2.3.3. Biomass Estimation
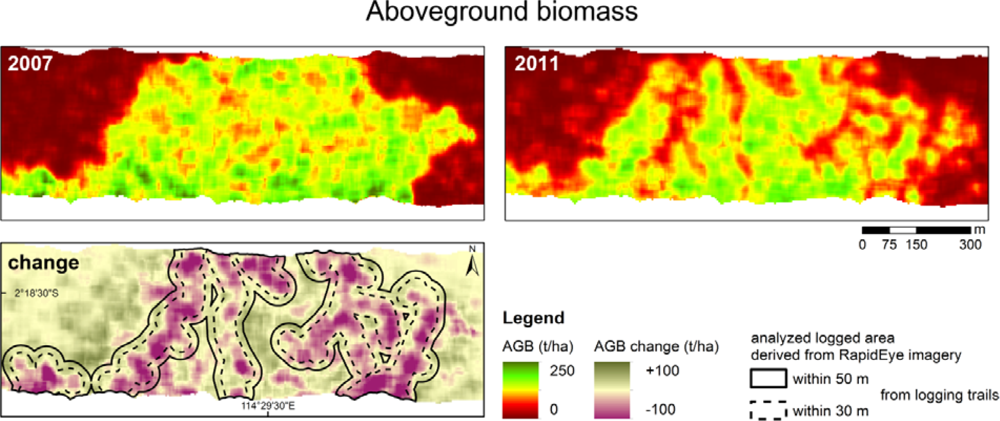
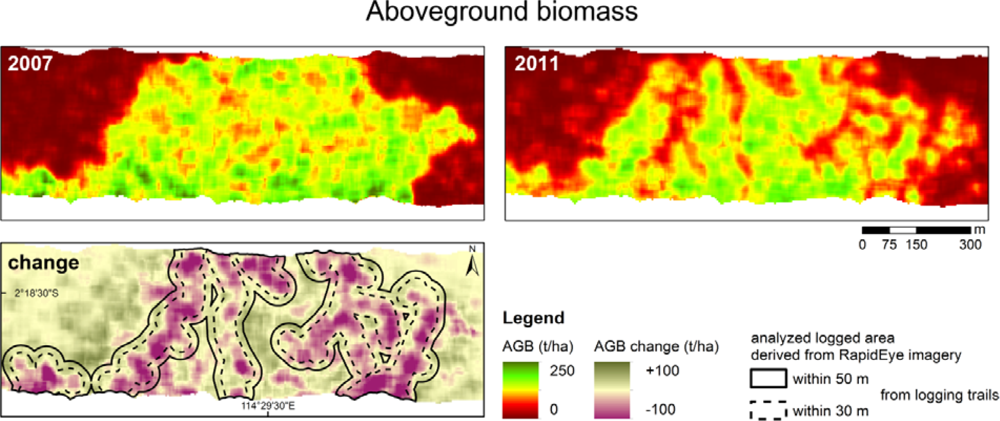
2.3.4. Change Analysis
3. Results
3.1. Canopy Height Models
3.2. AGB Regression Models
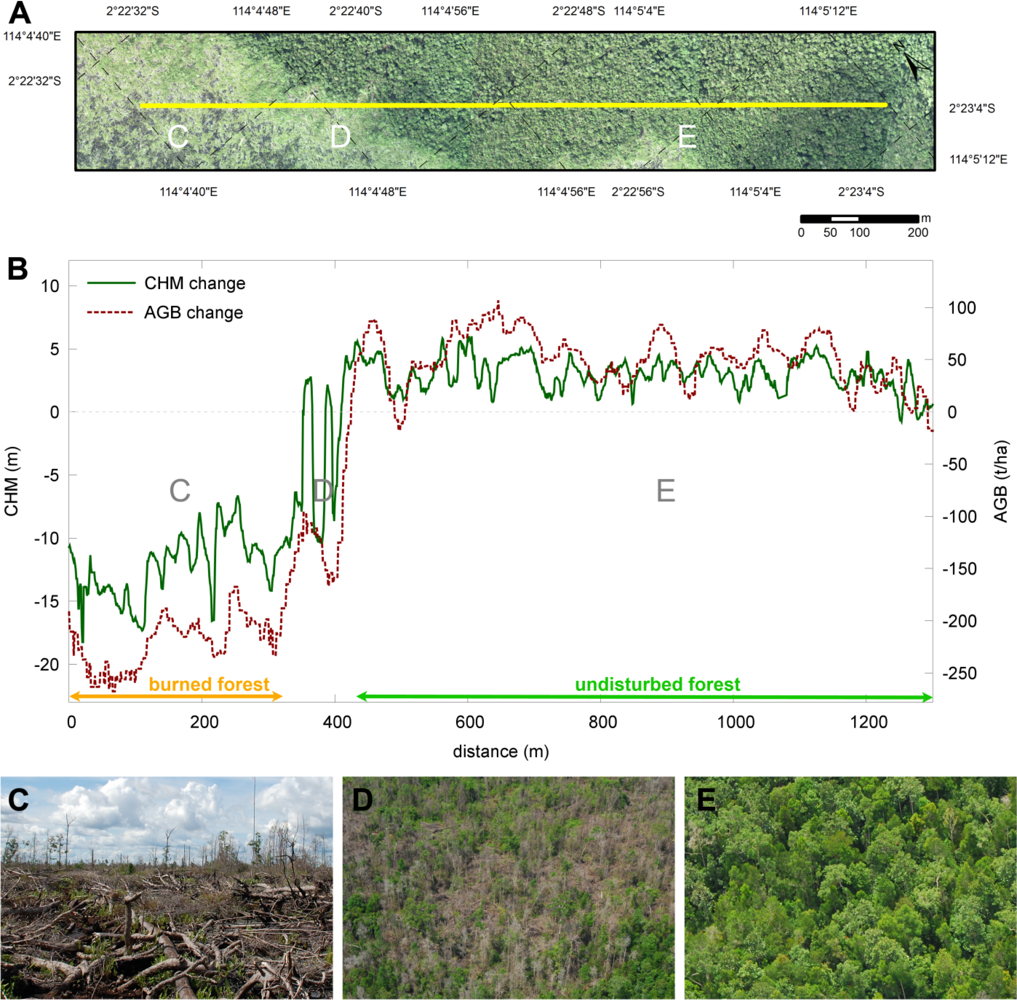
3.3. Change Analyses
4. Discussion
5. Conclusion
Acknowledgments
- Conflict of InterestThe authors declare no conflict of interest.
References
- Campbell, B.M. Beyond Copenhagen: REDD plus, agriculture, adaptation strategies and poverty. Glob. Environ. Chang. 2009, 19, 397–399. [Google Scholar]
- Food and Agriculture Organization (FAO). State of the World’s Forests 2009; Food and Agriculture Organization of the United Nations: Rome, Italy, 2009; Available online: http://www.fao.org/docrep/011/i0350e/i0350e00.htm (accessed on 4 February 2013).
- Page, S.E.; Hoscilo, A.; Langner, A.; Tansey, K.; Siegert, F.; Limin, S.; Rieley, J.O. Tropical Peatland Fires in Southeast Asia. In Tropical Fire Ecology: Climate Change, Land Use, and Ecosystems Dynamics; Cochrane, M.A., Ed.; Springer-Praxis: Berlin, Germany, 2009; Chapter 9; pp. 263–287. [Google Scholar]
- Page, S.E.; Rieley, J.O.; Banks, C.J. Global and regional importance of the tropical peatland carbon pool. Glob. Change Biol. 2011, 17, 798–818. [Google Scholar]
- Jaenicke, J.; Rieley, J.O.; Mott, C.; Kimman, P.; Siegert, F. Determination of the amount of carbon stored in Indonesian peatlands. Geoderma 2008, 147, 151–158. [Google Scholar]
- Baccini, A.; Goetz, S.; Walker, W.; Laporte, N.; Sun, M.; Sulla-Menashe, D.; Hackler, J.; Beck, P.; Dubayah, R.; Friedl, M.; et al. Estimated carbon dioxide emissions from tropical deforestation improved by carbon-density maps. Nat. Clim. Change 2012, 2, 182–185. [Google Scholar]
- Couwenberg, J.; Dommain, R.; Joosten, H. Greenhouse gas fluxes from tropical peatlands in south-east Asia. Glob. Change Biol. 2010, 16, 1715–1732. [Google Scholar]
- Murdiyarso, D.; Hergoualc’h, K.; Verchot, L.V. Opportunities for reducing greenhouse gas emissions in tropical peatlands. Proc. Natl. Acad. Sci. USA 2010, 107, 19655–19660. [Google Scholar]
- Van der Werf, G.R.; Morton, D.C.; DeFries, R.S.; Olivier, J.G.J.; Kasibhatla, P.S.; Jackson, R.B.; Collatz, G.J.; Randerson, J.T. CO2 emissions from forest loss. Nat. Geosci. 2009, 2, 829. [Google Scholar]
- Miettinen, J.; Liew, S.C. Two decades of destruction in Southeast Asia’s peat swamp forests. Front. Ecol. Environ. 2012, 10, 124–128. [Google Scholar]
- Siegert, F.; Ruecker, G.; Hinrichs, A.; Hoffmann, A.A. Increased damage from fires in logged forests during droughts caused by El Nino. Nature 2001, 414, 437–440. [Google Scholar]
- Edwards, D.P.; Koh, L.P.; Laurance, W.F. Indonesia’s REDD+ pact: Saving imperilled forests or business as usual? Biol. Conserv. 2012, 151, 41–44. [Google Scholar]
- Boehm, H.D.V.; Siegert, F. The impact of logging and land use change in Central Kalimantan, Indonesia. Int. Peat J. 2004, 12, 3–10. [Google Scholar]
- Pinard, M.A.; Putz, F.E. Retaining forest biomass by reducing logging damage. Biotropica 1996, 28, 278–295. [Google Scholar]
- Berry, N.J.; Phillips, O.L.; Lewis, S.L.; Hill, J.K.; Edwards, D.P.; Tawatao, N.B.; Ahmad, N.; Magintan, D.; Khen, C.V.; Maryati, M.; et al. The high value of logged tropical forests: Lessons from northern Borneo. Biodivers. Conserv. 2010, 19, 985–997. [Google Scholar]
- Whitmore, T.C. Tropical Rain Forests of the Far East; Clarendon Press: Oxford, UK, 1984. [Google Scholar]
- Felton, A.M.; Engstrom, L.M.; Felton, A.; Knott, C.D. Orangutan population density, forest structure and fruit availability in hand-logged and unlogged peat swamp forests in West Kalimantan, Indonesia. Biol. Conserv. 2003, 114, 91–101. [Google Scholar]
- Goetz, S.; Dubayah, R. Advances in remote sensing technology and implications for measuring and monitoring forest carbon stocks and change. Carbon Manag. 2011, 2, 231–244. [Google Scholar]
- Gibbs, H.K.; Brown, S.; Niles, J.O.; Foley, J.A. Monitoring and estimating tropical forest carbon stocks: Making REDD a reality. Envrion. Res. Lett. 2007, 2, 1–13. [Google Scholar]
- Jung, J.; Crawford, M.M. Extraction of features from LIDAR waveform data for characterizing forest structure. IEEE Geosci. Remote Sens. Lett. 2012, 9, 492–496. [Google Scholar]
- Vincent, G.; Sabatier, D.; Blanc, L.; Chave, J.; Weissenbacher, E.; Pélissier, R.; Fonty, E.; Molino, J.F.; Couteron, P. Accuracy of small footprint airborne LiDAR in its predictions of tropical moist forest stand structure. Remote Sens. Environ. 2012, 125, 23–33. [Google Scholar]
- Duncanson, L.; Niemann, K.; Wulder, M. Estimating forest canopy height and terrain relief from GLAS waveform metrics. Remote Sens. Environ. 2010, 114, 138–154. [Google Scholar]
- Gleason, C.J.; Im, J. A review of remote sensing of forest biomass and biofuel: Options for small-area applications. GISci. Remote Sens. 2011, 48, 141–170. [Google Scholar]
- Asner, G.P.; Powell, G.V.N.; Mascaro, J.; Knapp, D.E.; Clark, J.K.; Jacobson, J.; Kennedy-Bowdoin, T.; Balaji, A.; Paez-Acosta, G.; Victoria, E.; et al. High-resolution forest carbon stocks and emissions in the Amazon. Proc. Natl. Acad. Sci. USA 2010, 107, 16738–16742. [Google Scholar]
- Asner, G.P.; Mascaro, J.; Muller-Landau, H.C.; Vieilledent, G.; Vaudry, R.; Rasamoelina, M.; Hall, J.S.; van Breugel, M. A universal airborne LiDAR approach for tropical forest carbon mapping. Oecologia 2012, 168, 1147–1160. [Google Scholar]
- Mascaro, J.; Detto, M.; Asner, G.P.; Muller-Landau, H.C. Evaluating uncertainty in mapping forest carbon with airborne LiDAR. Remote Sens. Environ. 2011, 115, 3770–3774. [Google Scholar]
- Kronseder, K.; Ballhorn, U.; Böhm, V.; Siegert, F. Aboveground biomass estimation across forest types at different degradation levels in Central Kalimantan using LiDAR data. Int. J. Appl. Earth Obs. 2012, 18, 37–48. [Google Scholar]
- Ballhorn, U.; Jubanski, J.; Siegert, F. ICESat/GLAS Data as a measurement tool for peatland topography and peat swamp forest biomass in Kalimantan, Indonesia. Remote Sens. 2011, 3, 1957–1982. [Google Scholar]
- Jubanski, J.; Ballhorn, U.; Kronseder, K.; Franke, J.; Siegert, F. Detection of large above ground biomass variability in lowland forest ecosystems by airborne LiDAR. Biogeosci. Discuss. 2012, 9, 11815–11842. [Google Scholar]
- Sweda, T.; Tsuzuki, H.; Maeda, Y.; Boehm, V.; Limin, S.H. Above- and Below-Ground Carbon Budget of Degraded Tropical Peatland Revealed by Multi-temporal Airborne Laser Altimetry. Proceedings of the 14th International Peat Congress, Stockholm, Sweden, 3–8 June 2012.
- Meyer, V.; Saatchi, S.S.; Chave, J.; Dalling, J.; Bohlman, S.; Fricker, G.A.; Robinson, C.; Neumann, M. Detecting tropical forest biomass dynamics from repeated airborne Lidar measurements. Biogeosci. Discuss. 2013, 10, 1957–1992. [Google Scholar]
- Bater, C.W.; Wulder, M.A.; Coops, N.C.; Nelson, R.F.; Hilker, T.; Naesset, E. Stability of sample-based scanning-LiDAR-derived vegetation metrics for forest monitoring. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2385–2392. [Google Scholar]
- Vepakomma, U.; St-Onge, B.; Kneeshaw, D. Spatially explicit characterization of boreal forest gap dynamics using multi-temporal LiDAR data. Remote Sens. Environ. 2008, 112, 2326–2340. [Google Scholar]
- Dubayah, R.; Sheldon, S.; Clark, D.; Hofton, M.; Blair, J.; Hurtt, G.; Chazdon, R. Estimation of tropical forest height and biomass dynamics using lidar remote sensing at La Selva, Costa Rica. J. Geophys. Res.-Biogeo. 2010, 115, 1–17. [Google Scholar]
- Hooijer, A.; Page, S.; Canadell, J.G.; Silvius, M.; Kwadijk, J.; Wosten, H.; Jauhiainen, J. Current and future CO2 emissions from drained peatlands in Southeast Asia. Biogeosciences 2010, 7, 1505–1514. [Google Scholar]
- Pearson, T.; Walker, S.; Brown, S. Sourcebook for Land Use, Land-use Change and Forestry Projects; Winrock International: Little Rock, AR, USA, 2005. [Google Scholar]
- Chudnoff, M. Tropical Timbers of the World. In Agriculture Handbook 607; US Department of Agriculture, Forest Service, Forest Product Labratory: Madison, WI, USA, 1984. [Google Scholar]
- World Agroforestry Centre Wood Density Database. 2011. Available online: http://www.worldagroforestrycentre.org/Sea/Products/AFDbases/WD/Index.htm (accessed on 1 March 2012).
- National Greenhouse Gas Inventories Programme. Intergovernmental Panel on Climate Change. 2006 IPCC Guidelines for National Greenhouse Gas Inventories; Eggleston, H.S., Buendia, L., Miwa, K., Ngara, T., Tanabe, K., Eds.; Institute for Global Environmental Strategies (IGES): Kamiyamaguchi, Japan, 2006. [Google Scholar]
- Brown, S. Estimation Biomass and Biomass Change of Tropical Forests: A Primer; FAO Forest Paper 134; FAO: Rome, Italy, 1997; pp. 1–55. [Google Scholar]
- Hughes, R.F.; Kauffman, J.B.; Jaramillo, V.J. Biomass, carbon, and nutrient dynamics of secondary forests in a humid tropical region of Mexico. Ecology 1999, 80, 1892–1907. [Google Scholar]
- Chave, J.; Andalo, C.; Brown, S.; Cairns, M.A.; Chambers, J.Q.; Eamus, D.; Folster, H.; Fromard, F.; Higuchi, N.; Kira, T.; et al. Tree allometry and improved estimation of carbon stocks and balance in tropical forests. Oecologia 2005, 145, 87–99. [Google Scholar]
- Franke, J.; Navratil, P.; Keuck, V.; Peterson, K.; Siegert, F. Monitoring fire and selective logging activities in tropical peat swamp forests. IEEE J. Sel. Top. Appl. Earth Observ. 2012, 5, 1811–1820. [Google Scholar]
- Pfeifer, N.; Stadler, P.; Briese, C. Derivation of Digital Terrain Models in the SCOP++ Environment. Proceedings of OEEPE Workshop on Airborne Laserscanning and Interferometric SAR for Detailed Digital Terrain Models, Stockholm, Sweden, 1–3 March 2001.
- Hudak, A.T.; Strand, E.K.; Vierling, L.A.; Byrne, J.C.; Eitel, J.U. H.; Martinuzzi, S.; Falkowski, M.J. Quantifying aboveground forest carbon pools and fluxes from repeat LiDAR surveys. Remote Sens. Environ. 2012, 123, 25–40. [Google Scholar]
- Jenkins, R.B. Airborne laser scanning for vegetation structure quantification in a south east Australian scrubby forest-woodland. Austral Ecol. 2012, 37, 44–55. [Google Scholar]
- Dougherty, E.R.; Lotufo, R.A. Hands-On Morphological Image Processing; SPIE Bellingham: Bellingham, WA, USA, 2003. [Google Scholar]
- Lefsky, M.A.; Cohen, W.B.; Harding, D.J.; Parker, G.G.; Acker, S.A.; Gower, S.T. Lidar remote sensing of above-ground biomass in three biomes. Glob. Ecol. Biogeogr. 2002, 11, 393–399. [Google Scholar]
- Asner, G.P.; Knapp, D.E.; Balaji, A.; Paez-Acosta, G. Automated mapping of tropical deforestation and forest degradation: CLASlite. J. Appl. Remote Sens. 2009, 3, 1–24. [Google Scholar]
- Saatchi, S.S.; Harris, N.L.; Brown, S.; Lefsky, L.; Mitchard, E.T.A.; Salas, W.; Zutta, B.R.; Buermann, W.; Lewis, S.L.; Hagen, S.; et al. Benchmark map of forest carbon stocks in tropical regions across three continents. Proc. Natl. Acad. Sci. USA 2011, 108, 9899–9904. [Google Scholar]
- Mascaro, J.; Asner, G.; Muller-Landau, H.; van Breugel, M.; Hall, J.; Dahlin, K. Controls over aboveground forest carbon density on Barro Colorado Island, Panama. Biogeosciences 2011, 8, 1615–1629. [Google Scholar]
- Boehm, V.; Liesenberg, V.; Sweda, T.; Tsuzuki, H.; Limin, S.H. Multi-temporal Airborne LiDAR-Surveys in 2007 and 2011 over Tropical Peat Swamp Forest Environments in Central Kalimantan, Indonesia. Proceedings of the 14th International Peat Congress, Stockholm, Sweden, 3–8 June 2012.
- Mazzei, L.; Sist, P.; Ruschel, A.; Putz, F.E.; Marco, P.; Pena, W.; Ribeiro Ferreira, J.E. Above-ground biomass dynamics after reduced-impact logging in the Eastern Amazon. For. Ecol. Manag. 2010, 259, 367–373. [Google Scholar]
- Hashimotio, T.; Kojima, K.; Tange, T.; Sasaki, S. Changes in carbon storage in fallow forests in the tropical lowlands of Borneo. For. Ecol. Manag. 2000, 126, 331–337. [Google Scholar]
- Hiratsuka, M.; Toma, T.; Diana, R.; Hadriyanto, D.; Morikawa, Y. Biomass recovery of naturally regenerated vegetation after the 1998 forest fire in East Kalimantan, Indonesia. JARQ-Jpn. Agr. Res. Quart. 2006, 40, 277–282. [Google Scholar]
- Shepherd, P.A.; Rieley, J.O.; Page, S.E. The Relationship between Forest Vegetation and Peat Characteristics in the Upper Catchment of Sungai Sebangau, Central Kalimantan. In Biodiversity and Sustainability of Tropical Peatlands; Rieley, J.O., Page, S.E., Eds.; Samara Publishing Limited: Cardigan, UK, 1997; pp. 191–207. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | 2007 | 2011 |
|---|---|---|
| LiDAR system | Riegl LMS-Q560 | Optech Orion M200 |
| Acquisition date | 5–10 August | 15 August–14 October |
| Power | 100 KHz | 100 KHz |
| Nominal Altitude | 500 m | 800 m |
| Wavelength | 1.5 μm | 1.064 μm |
| Half Scan angle | ±30° | ±11° |
| Average point density | 1.5 points/m2 | 10.7 points/m2 |
| Forest Condition | Unaffected | Selective Logged within | Burned | |||||
|---|---|---|---|---|---|---|---|---|
| 30 m | 50 m | |||||||
| Mean | std | Mean | std | Mean | std | Mean | std | |
| area (ha) | 3,393 | 67 | 113 | 555 | ||||
| CHM 2007 (m) | 14.0 | 5.8 | 13.5 | 6.0 | 13.2 | 6.0 | 11.1 | 6.7 |
| CHM 2011 (m) | 16.3 | 4.7 | 13.9 | 5.9 | 14.2 | 5.8 | 1.7 | 4.0 |
| CHM change (m) | +2.3 | 1.9 | +0.5 | 3.1 | +1.0 | 3.0 | −9.4 | 5.3 |
| AGB 2007 (t/ha) | 203 | 58 | 215 | 62 | 209 | 63 | 154 | 80 |
| AGB 2011 (t/ha) | 223 | 47 | 160 | 57 | 167 | 57 | 12 | 21 |
| AGB change (t/ha) | +20 | 33 | −55 | 41 | −42 | 44 | −142 | 77 |
© 2013 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Englhart, S.; Jubanski, J.; Siegert, F. Quantifying Dynamics in Tropical Peat Swamp Forest Biomass with Multi-Temporal LiDAR Datasets. Remote Sens. 2013, 5, 2368-2388. https://doi.org/10.3390/rs5052368
Englhart S, Jubanski J, Siegert F. Quantifying Dynamics in Tropical Peat Swamp Forest Biomass with Multi-Temporal LiDAR Datasets. Remote Sensing. 2013; 5(5):2368-2388. https://doi.org/10.3390/rs5052368
Chicago/Turabian StyleEnglhart, Sandra, Juilson Jubanski, and Florian Siegert. 2013. "Quantifying Dynamics in Tropical Peat Swamp Forest Biomass with Multi-Temporal LiDAR Datasets" Remote Sensing 5, no. 5: 2368-2388. https://doi.org/10.3390/rs5052368