Airborne Dual-Wavelength LiDAR Data for Classifying Land Cover

Abstract
:1. Introduction
2. Methodology
2.1. Study Area and Remote Sensing Data
2.2. Data Processing
2.3. Data Integration and Feature Selection
2.4. Classification
3. Results and Discussion
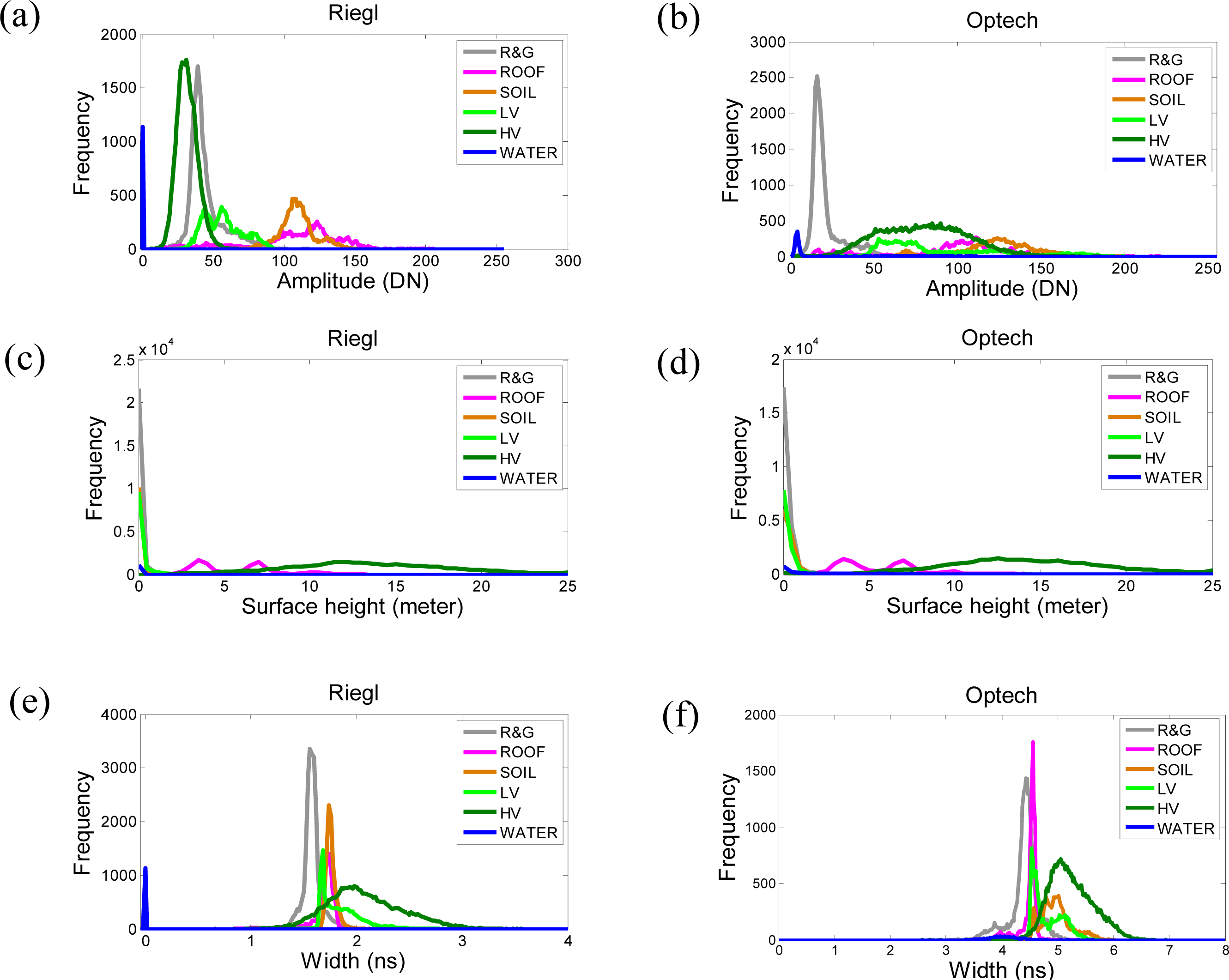
3.1. Analysis of Features
3.2. Feature Selection Using Bhattacharyya Distance
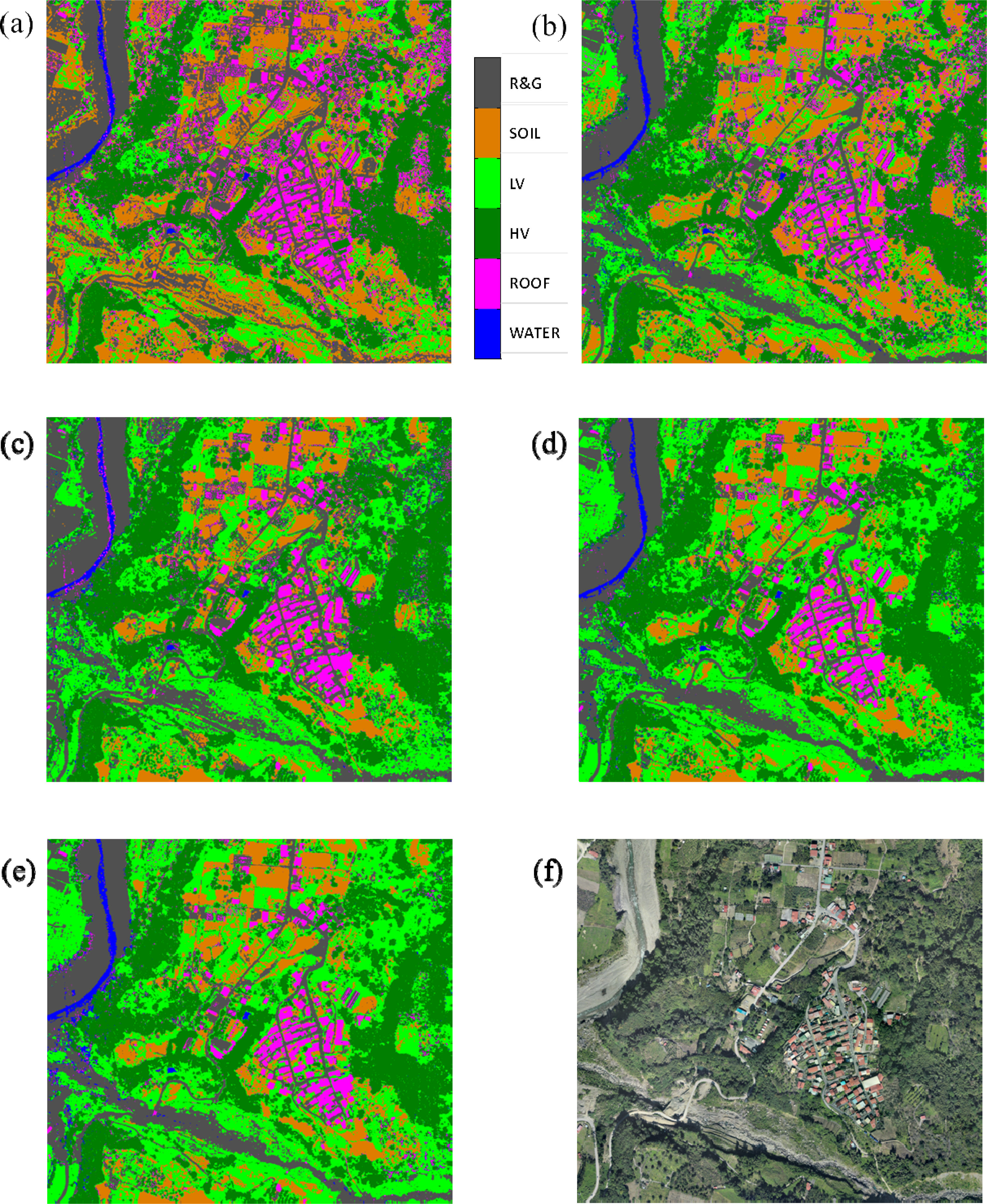
3.3. Classification Accuracies
4. Conclusion
Acknowledgments
Conflicts of Interest
References
- Korpela, I.S. Mapping of understory lichens with airborne discrete-return LiDAR data. Remote Sens. Environ 2008, 112, 3891–3897. [Google Scholar]
- Miliaresis, G.; Kokkas, N. Segmentation and object-based classification for the extraction of the building class from LIDAR DEMs. Comput. Geosci 2007, 33, 1076–1087. [Google Scholar]
- Suomalainen, J.; Hakala, T.; Kaartinen, H.; Räikkönen, E.; Kaasalainen, S. Demonstration of a virtual active hyperspectral LiDAR in automated point cloud classification. ISPRS J. Photogramm. Remote Sens 2011, 66, 637–641. [Google Scholar]
- Bork, E.W.; Su, J.G. Integrating LIDAR data and multispectral imagery for enhanced classification of rangeland vegetation: A meta analysis. Remote Sens. Environ 2007, 111, 11–24. [Google Scholar]
- Hellesen, T.; Matikainen, L. An object-based approach for mapping shrub and tree cover on grassland habitats by use of LiDAR and CIR orthoimages. Remote Sens 2013, 5, 558–583. [Google Scholar]
- Hartfield, K.A.; Landau, K.I.; van Leeuwen, W.J.D. Fusion of high resolution aerial multispectral and LiDAR data: Land cover in the context of urban mosquito habitat. Remote Sens 2011, 3, 2364–2383. [Google Scholar]
- Dalponte, M.; Bruzzone, L.; Gianelle, D. Fusion of hyperspectral and LIDAR remote sensing data for classification of complex forest areas. IEEE Trans. Geosci. Remote Sens 2008, 46, 1416–1427. [Google Scholar]
- Mallet, C.; Bretar, F. Full-waveform topographic lidar: State-of-the-art. ISPRS J. Photogramm. Remote Sens 2009, 64, 1–16. [Google Scholar]
- Neuenschwander, A.L.; Magruder, L.A.; Tyler, M. Landcover classification of small-footprint, full-waveform lidar data. J. Appl. Remote Sens 2009, 3. [Google Scholar] [CrossRef]
- Vaughn, N.R.; Moskal, L.M.; Turnblom, E.C. Fourier transformation of waveform Lidar for species recognition. Remote Sens. Lett 2011, 2, 347–356. [Google Scholar]
- Wagner, W.; Ullrich, A.; Ducic, V.; Melzer, T.; Studnicka, N. Gaussian decomposition and calibration of a novel small-footprint full-waveform digitising airborne laser scanner. ISPRS J. Photogramm. Remote Sens 2006, 60, 100–112. [Google Scholar]
- Alexander, C.; Tansey, K.; Kaduk, J.; Holland, D.; Tate, N.J. Backscatter coefficient as an attribute for the classification of full-waveform airborne laser scanning data in urban areas. ISPRS J. Photogramm. Remote Sens 2010, 65, 423–432. [Google Scholar]
- Wagner, W.; Hollaus, M.; Briese, C.; Ducic, V. 3D vegetation mapping using small-footprint full-waveform airborne laser scanners. Int. J. Remote Sens 2008, 29, 1433–1452. [Google Scholar]
- Hollaus, M.; Aubrecht, C.; Höfle, B.; Steinnocher, K.; Wagner, W. Roughness mapping on various vertical scales based on full-waveform airborne laser scanning data. Remote Sens 2011, 3, 503–523. [Google Scholar]
- Heinzel, J.; Koch, B. Exploring full-waveform LiDAR parameters for tree species classification. Int. J. Appl. Earth Obs. Geoinf 2011, 13, 152–160. [Google Scholar]
- Vaughn, N.R.; Moskal, L.M.; Turnblom, E.C. Tree species detection accuracies using discrete point lidar and airborne waveform lidar. Remote Sens 2012, 4, 377–403. [Google Scholar]
- Wei, G.; Shalei, S.; Bo, Z.; Shuo, S.; Faquan, L.; Xuewu, C. Multi-wavelength canopy LiDAR for remote sensing of vegetation: Design and system performance. ISPRS J. Photogramm. Remote Sens 2012, 69, 1–9. [Google Scholar]
- Rall, J.A.R.; Knox, R.G. Spectral ratio biospheric lidar. Proceedings of the 2004 IEEE International, Geoscience and Remote Sensing Symposium, 2004, IGARSS’04, Anchorage, AK, USA, 20–24 September 2004; 3, pp. 1951–1954.
- Kaasalainen, S.; Lindroos, T.; Hyyppa, J. Toward hyperspectral lidar: Measurement of spectral backscatter intensity with a supercontinuum laser source. IEEE Geosci. Remote Sens. Lett 2007, 4, 211–215. [Google Scholar]
- Hakala, T.; Suomalainen, J.; Kaasalainen, S.; Chen, Y. Full waveform hyperspectral LiDAR for terrestrial laser scanning. Opt. Express 2012, 20, 7119–7127. [Google Scholar]
- Woodhouse, I.H.; Nichol, C.; Sinclair, P.; Jack, J.; Morsdorf, F.; Malthus, T.J.; Patenaude, G. A multispectral canopy liDAR demonstrator project. IEEE Geosci. Remote Sens. Lett 2011, 8, 839–843. [Google Scholar]
- Wallace, A.; Nichol, C.; Woodhouse, I. Recovery of forest canopy parameters by Inversion of multispectral LiDAR data. Remote Sens 2012, 4, 509–531. [Google Scholar]
- Morsdorf, F.; Nichol, C.; Malthus, T.; Woodhouse, I.H. Assessing forest structural and physiological information content of multi-spectral LiDAR waveforms by radiative transfer modelling. Remote Sens. Environ 2009, 113, 2152–2163. [Google Scholar]
- Hancock, S.; Lewis, P.; Foster, M.; Disney, M.; Muller, J.-P. Measuring forests with dual wavelength lidar: A simulation study over topography. Agric. For. Meteorol 2012, 161, 123–133. [Google Scholar]
- Irish, J.L.; Lillycrop, W.J. Scanning laser mapping of the coastal zone: The SHOALS system. ISPRS J. Photogramm. Remote Sens 1999, 54, 123–129. [Google Scholar]
- Chen, Y.; Raikkonen, E.; Kaasalainen, S.; Suomalainen, J.; Hakala, T.; Hyyppa, J.; Chen, R. Two-channel hyperspectral LiDAR with a supercontinuum laser source. Sensors 2010, 10, 7057–7066. [Google Scholar]
- Gaulton, R.; Danson, F.M.; Ramirez, F.A.; Gunawan, O. The potential of dual-wavelength laser scanning for estimating vegetation moisture content. Remote Sens. Environ 2013, 132, 32–39. [Google Scholar]
- Optech. Airborne Surveying. Available online: http://www.optech.ca/ (accessed on 20 March 2011).
- Riegl Laser Measurement Systems. Products of Airborne Scanning. Available online: http://www.riegl.com/ (accessed on 20 March 2011).
- Höfle, B.; Pfeifer, N. Correction of laser scanning intensity data: Data and model-driven approaches. ISPRS J. Photogramm. Remote Sens 2007, 62, 415–433. [Google Scholar]
- Briese, C.; Pfennigbauer, M.; Lehner, H.; Ullrich, A.; Wagner, W.; Pfeifer, N. Radiometric calibration of multi-wavelength airborne laser scanning data. Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXII ISPRS Congress, Melbourne, Australia, 25 August–1 September 2012.
- Antonarakis, A.S.; Richards, K.S.; Brasington, J. Object-based land cover classification using airborne LiDAR. Remote Sens. Environ 2008, 112, 2988–2998. [Google Scholar]
- Cobby, D.M.; Mason, D.C.; Davenport, I.J. Image processing of airborne scanning laser altimetry data for improved river flood modelling. ISPRS J. Photogramm. Remote Sens 2001, 56, 121–138. [Google Scholar]
- Jinha, J.; Crawford, M.M. Extraction of features from LIDAR waveform data for characterizing forest structure. IEEE Geosci. Remote Sens. Lett 2012, 9, 492–496. [Google Scholar]
- Reitberger, J.; Schnörr, C.; Krzystek, P.; Stilla, U. 3D segmentation of single trees exploiting full waveform LIDAR data. ISPRS J. Photogramm. Remote Sens 2009, 64, 561–574. [Google Scholar]
- Choi, E.; Lee, C. Feature extraction based on the Bhattacharyya distance. Pattern Recognit 2003, 36, 1703–1709. [Google Scholar]
- Bretar, F.; Chauve, A.; Bailly, J.S.; Mallet, C.; Jacome, A. Terrain surfaces and 3-D landcover classification from small footprint full-waveform lidar data: Application to badlands. Hydrol. Earth Syst. Sci 2009, 13, 1531–1544. [Google Scholar]
- Mallet, C.; Bretar, F.; Roux, M.; Soergel, U.; Heipke, C. Relevance assessment of full-waveform lidar data for urban area classification. ISPRS J. Photogramm. Remote Sens 2011, 66, S71–S84. [Google Scholar]
- Ke, Y.; Quackenbush, L.J.; Im, J. Synergistic use of QuickBird multispectral imagery and LIDAR data for object-based forest species classification. Remote Sens. Environ 2010, 114, 1141–1154. [Google Scholar]
- Tooke, T.R.; Coops, N.C.; Goodwin, N.R.; Voogt, J.A. Extracting urban vegetation characteristics using spectral mixture analysis and decision tree classifications. Remote Sens. Environ 2009, 113, 398–407. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Optech ALTM Pegasus HD400 | Riegl LMS-Q680i | |
|---|---|---|
| Laser wavelength (nm) | 1,064 | 1,550 |
| Pulse width (FWHM, full width at half maximum) (ns) | 7 | 4 |
| Beam divergence (mrad) | 0.20 | 0.50 |
| Field of view (degree) | 40 | 60 |
| Footprint size (m) | 0.2 at 1 km | 0.5 at 1 km |
| Pulse rate (kHZ) | 150 | 220 |
| Range accuracy (cm) | 1 | 2 |
| Date of survey | 7 October 2011 | 8 January 2012 |
| Flying height (m) | 2,000 | 1,900 |
| Point density (pts/m2) | 1.81 | 2.07 |
| Bhattacharyya Distance Using h * | ||||||
| R&G | SOIL | LV | HV | ROOF | WATER | |
| R&G | 0 | 0.28 (0.25) | 0.00 (0.16) | 3.21 (2.52) | 2.27 (1.30) | 19.52 (0.24) |
| SOIL | 0 | 0.29 (0.02) | 3.79 (3.10) | 2.87 (1.94) | 18.98 (0.11) | |
| LV | 0 | 3.20 (2.98) | 2.26 (1.82) | 19.54 (0.15) | ||
| HV | 0 | 0.76 (0.92) | 23.07 (3.41) | |||
| ROOF | 0 | 22.16 (2.31) | ||||
| WATER | 0 | |||||
| Bhattacharyya Distance Using σ * | ||||||
| R&G | SOIL | LV | HV | ROOF | WATER | |
| R&G | 0 | 0.74 (0.70) | 0.48 (0.31) | 0.83 (0.56) | 0.12 (0.05) | 80.07 (0.28) |
| SOIL | 0 | 0.30 (0.12) | 0.85 (0.11) | 0.30 (0.60) | 301.67 (1.68) | |
| LV | 0 | 0.27 (0.20) | 0.11 (0.23) | 51.78 (1.06) | ||
| HV | 0 | 0.47 (0.54) | 28.45 (1.02) | |||
| ROOF | 0 | 51.23 (0.53) | ||||
| WATER | 0 | |||||
| Bhattacharyya Distance Using AOptech ** | ||||||
| R&G | SOIL | LV | HV | ROOF | WATER | |
| R&G | 0 | 5.44 | 1.68 | 1.06 | 1.92 | 2.58 |
| SOIL | 0 | 0.21 | 0.63 | 0.14 | 7.66 | |
| LV | 0 | 0.09 | 0.01 | 2.88 | ||
| HV | 0 | 0.14 | 2.12 | |||
| ROOF | 0 | 3.15 | ||||
| WATER | 0 | |||||
| Bhattacharyya Distance Using ARiegl ** | ||||||
| R&G | SOIL | LV | HV | ROOF | WATER | |
| R&G | 0 | 5.34 | 0.44 | 0.29 | 1.42 | 28.47 |
| SOIL | 0 | 1.98 | 7.29 | 0.18 | 38.63 | |
| LV | 0 | 1.06 | 0.68 | 26.63 | ||
| HV | 0 | 1.81 | 25.36 | |||
| ROOF | 0 | 24.70 | ||||
| WATER | 0 | |||||
| Bhattacharyya Distance Using ARiegl, AOptech | ||||||
| R&G | SOIL | LV | HV | ROOF | WATER | |
| R&G | 0 | 8.94 | 1.69 | 1.55 | 2.17 | 29.98 |
| SOIL | 0 | 2.09 | 7.36 | 0.05 | 40.48 | |
| LV | 0 | 1.17 | 0.48 | 26.10 | ||
| HV | 0 | 1.58 | 25.00 | |||
| ROOF | 0 | 24.95 | ||||
| WATER | 0 | |||||
| Bhattacharyya Distance Using ARiegl, AOptech, h, σ | ||||||
| R&G | SOIL | LV | HV | ROOF | WATER | |
| R&G | 0 | 9.52 | 2.34 | 7.53 | 4.66 | 111.44 |
| SOIL | 0 | 2.91 | 13.79 | 4.03 | 376.15 | |
| LV | 0 | 5.47 | 4.42 | 103.44 | ||
| HV | 0 | 5.21 | 56.45 | |||
| ROOF | 0 | 112.30 | ||||
| WATER | 0 | |||||
| Bhattacharyya Distance Using ARiegl, AOptech, h | ||||||
| R&G | SOIL | LV | HV | ROOF | WATER | |
| R&G | 0 | 8.23 | 1.70 | 5.45 | 3.82 | 107.14 |
| SOIL | 0 | 2.55 | 12.07 | 3.58 | 60.54 | |
| LV | 0 | 4.97 | 3.39 | 98.71 | ||
| HV | 0 | 3.22 | 46.58 | |||
| ROOF | 0 | 44.97 | ||||
| WATER | 0 | |||||
| Feature Set | Reference Pixels | Classified Pixels | Producer’s Accuracy (%) | |||||
|---|---|---|---|---|---|---|---|---|
| R&G | SOIL | LV | HV | ROOF | WATER | |||
| ϕ1 | R&G | 21,231 | 1,731 | 70 | 0 | 23 | 3 | 92.07 |
| SOIL | 508 | 9,758 | 59 | 0 | 2 | 0 | 94.49 | |
| LV | 3,029 | 5,174 | 2,602 | 3 | 0 | 0 | 24.07 | |
| HV | 22 | 0 | 166 | 29,402 | 1,473 | 60 | 94.47 | |
| ROOF | 233 | 0 | 21 | 1,001 | 8,664 | 8 | 87.28 | |
| WATER | 0 | 0 | 0 | 0 | 0 | 1,254 | 100.00 | |
| User’s accuracy (%) | 84.85 | 58.56 | 89.17 | 96.70 | 85.26 | 94.64 | ||
| Overall accuracy (%) | 84.29 | |||||||
| Kappa | 0.804 | |||||||
| ϕ2 | R&G | 22,790 | 14 | 208 | 1 | 4 | 41 | 98.84 |
| SOIL | 0 | 10,275 | 50 | 0 | 2 | 0 | 99.50 | |
| LV | 409 | 5,540 | 4,844 | 13 | 0 | 2 | 44.82 | |
| HV | 19 | 1 | 119 | 30,001 | 946 | 37 | 96.39 | |
| ROOF | 193 | 39 | 40 | 974 | 8,680 | 1 | 87.44 | |
| WATER | 0 | 0 | 0 | 0 | 0 | 1,254 | 100.00 | |
| User’s accuracy (%) | 97.35 | 64.75 | 92.07 | 96.81 | 90.12 | 93.93 | ||
| Overall accuracy (%) | 90.00 | |||||||
| Kappa | 0.872 | |||||||
| ϕ3 | R&G | 22,173 | 259 | 526 | 0 | 91 | 9 | 96.16 |
| SOIL | 83 | 10,230 | 13 | 0 | 1 | 0 | 99.06 | |
| LV | 3,893 | 1,301 | 5,609 | 2 | 0 | 3 | 51.90 | |
| HV | 49 | 0 | 228 | 30,624 | 192 | 30 | 98.40 | |
| ROOF | 351 | 3 | 10 | 196 | 9,365 | 2 | 94.34 | |
| WATER | 0 | 0 | 0 | 0 | 0 | 1,254 | 100.00 | |
| User’s accuracy (%) | 83.52 | 86.75 | 87.83 | 99.36 | 97.06 | 96.61 | ||
| Overall accuracy (%) | 91.63 | |||||||
| Kappa | 0.892 | |||||||
| ϕ4 | R&G | 22,924 | 12 | 93 | 0 | 8 | 21 | 99.42 |
| SOIL | 0 | 10,283 | 43 | 0 | 1 | 0 | 99.57 | |
| LV | 309 | 943 | 9,543 | 6 | 0 | 7 | 88.30 | |
| HV | 30 | 0 | 249 | 30,767 | 54 | 23 | 98.86 | |
| ROOF | 360 | 19 | 55 | 14 | 9,477 | 2 | 95.47 | |
| WATER | 0 | 0 | 0 | 0 | 0 | 1,254 | 100.00 | |
| User’s accuracy (%) | 97.04 | 91.35 | 95.59 | 99.93 | 99.34 | 95.94 | ||
| Overall accuracy (%) | 97.40 | |||||||
| Kappa | 0.966 | |||||||
| ϕ5 | R&G | 22,942 | 24 | 73 | 1 | 1 | 17 | 99.50 |
| SOIL | 0 | 10,289 | 38 | 0 | 0 | 0 | 99.63 | |
| LV | 307 | 869 | 9,631 | 0 | 0 | 1 | 89.11 | |
| HV | 8 | 0 | 251 | 30,702 | 131 | 31 | 98.65 | |
| ROOF | 658 | 79 | 41 | 204 | 8,944 | 1 | 90.10 | |
| WATER | 0 | 0 | 0 | 0 | 0 | 1,254 | 100.00 | |
| User’s accuracy (%) | 95.93 | 91.37 | 95.98 | 99.34 | 98.55 | 96.17 | ||
| Overall accuracy (%) | 96.84 | |||||||
| Kappa | 0.959 | |||||||
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Wang, C.-K.; Tseng, Y.-H.; Chu, H.-J. Airborne Dual-Wavelength LiDAR Data for Classifying Land Cover. Remote Sens. 2014, 6, 700-715. https://doi.org/10.3390/rs6010700
Wang C-K, Tseng Y-H, Chu H-J. Airborne Dual-Wavelength LiDAR Data for Classifying Land Cover. Remote Sensing. 2014; 6(1):700-715. https://doi.org/10.3390/rs6010700
Chicago/Turabian StyleWang, Cheng-Kai, Yi-Hsing Tseng, and Hone-Jay Chu. 2014. "Airborne Dual-Wavelength LiDAR Data for Classifying Land Cover" Remote Sensing 6, no. 1: 700-715. https://doi.org/10.3390/rs6010700