Radar-to-Radar Interference Suppression for Distributed Radar Sensor Networks

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Radar-to-Radar Interference Suppression
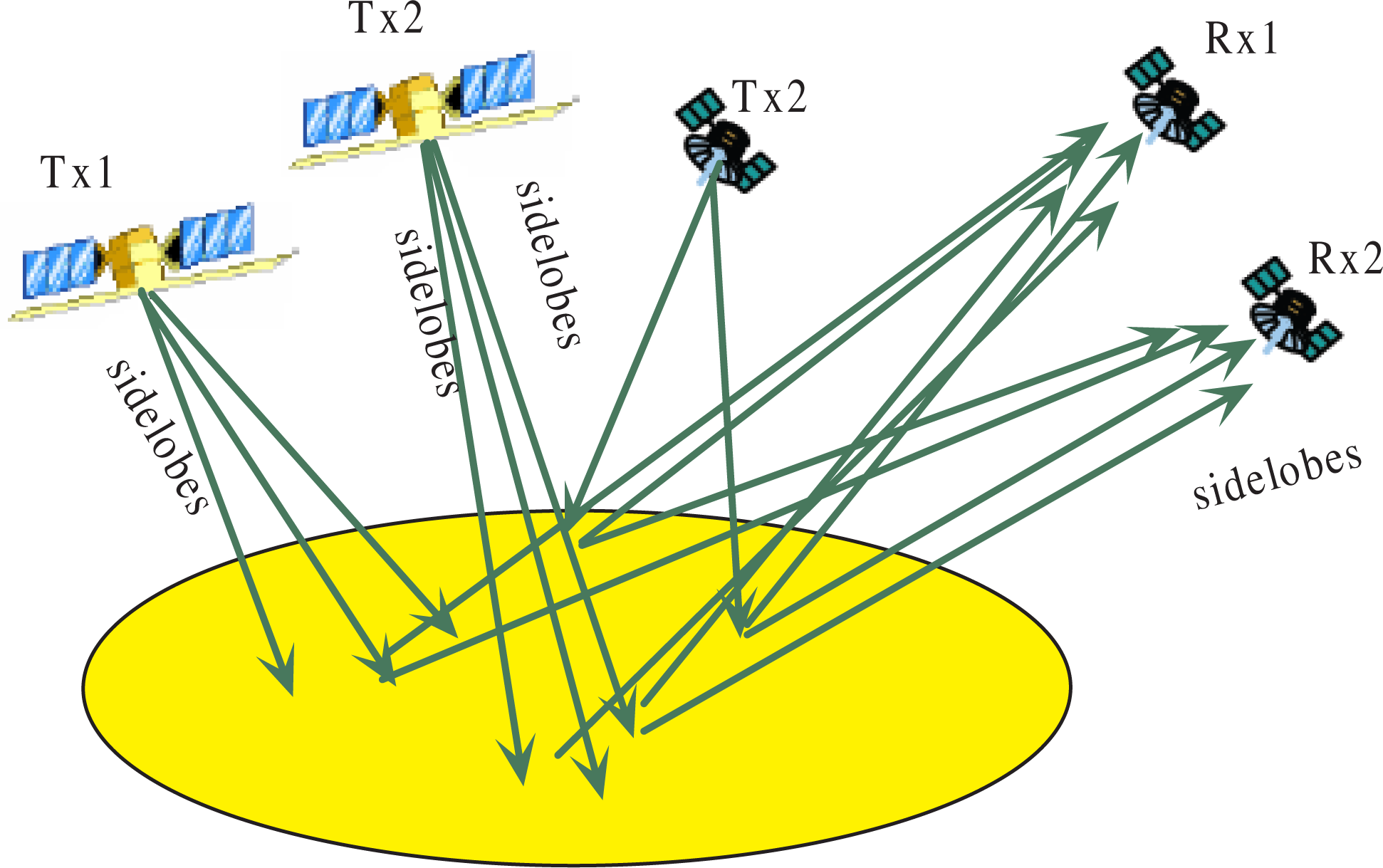
2.1. Radar-to-Radar Interference
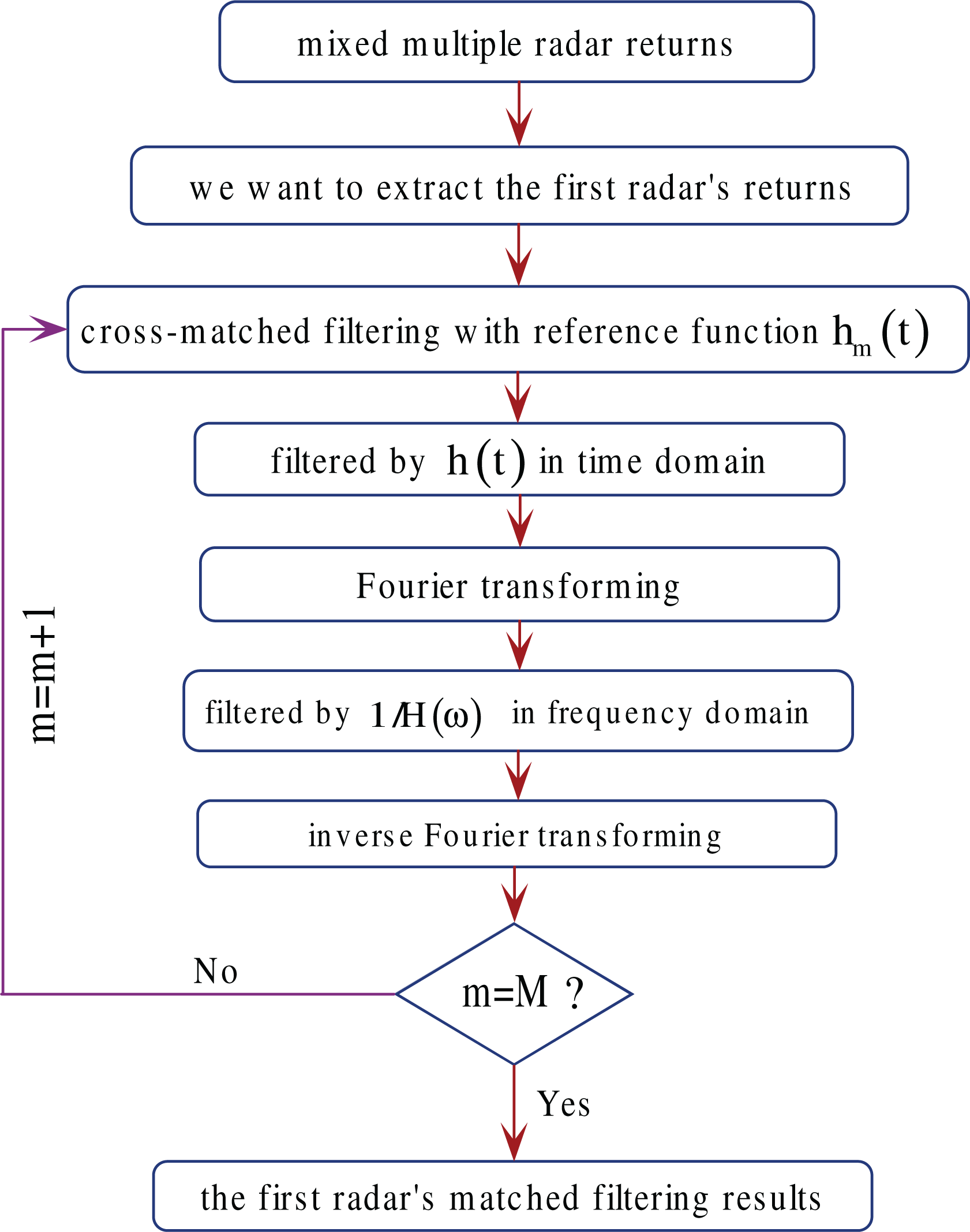
2.2. Iterative Suppression Algorithm
2.3. Interference Suppression Ratio
3. Numerical Simulation Examples
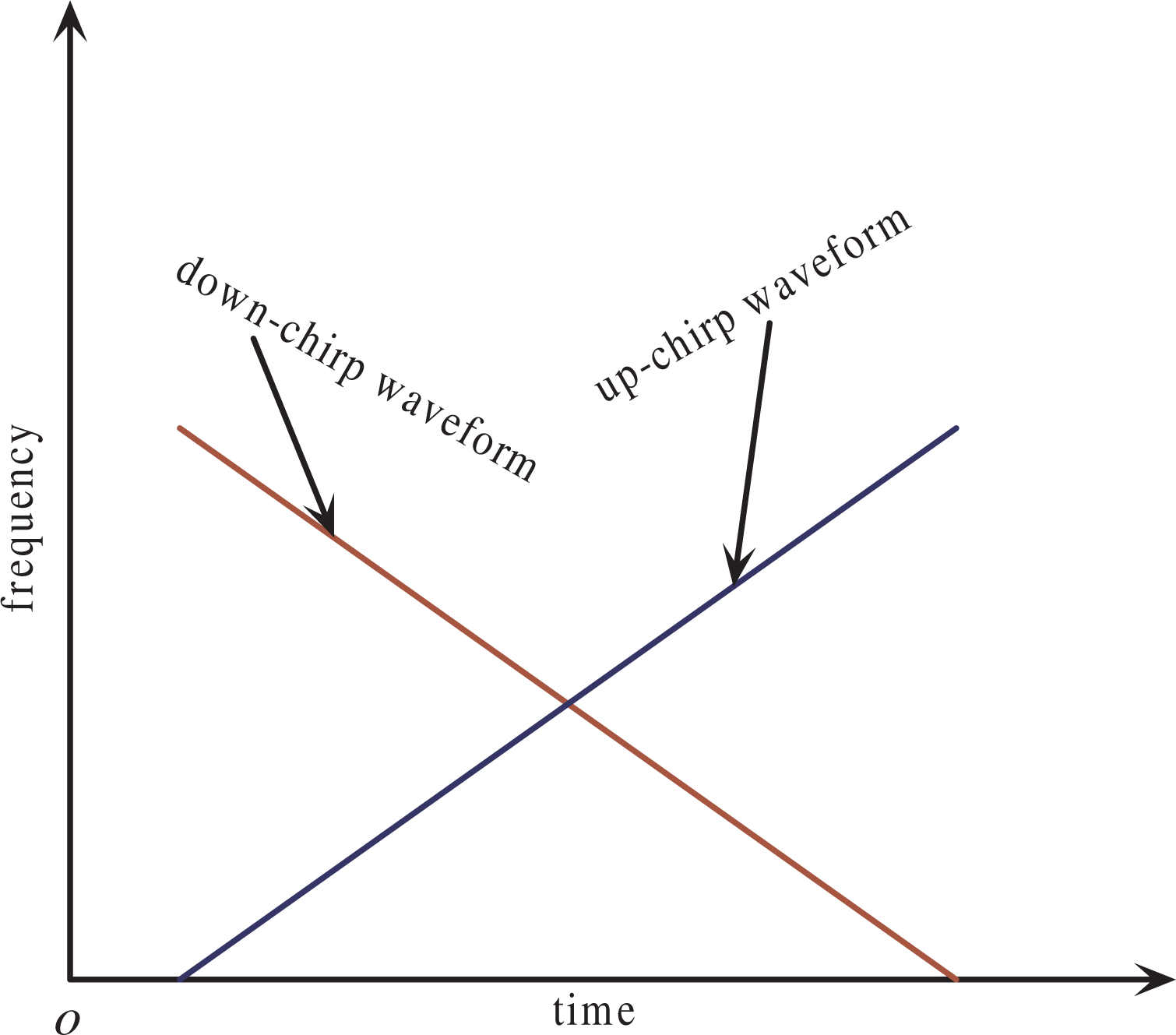
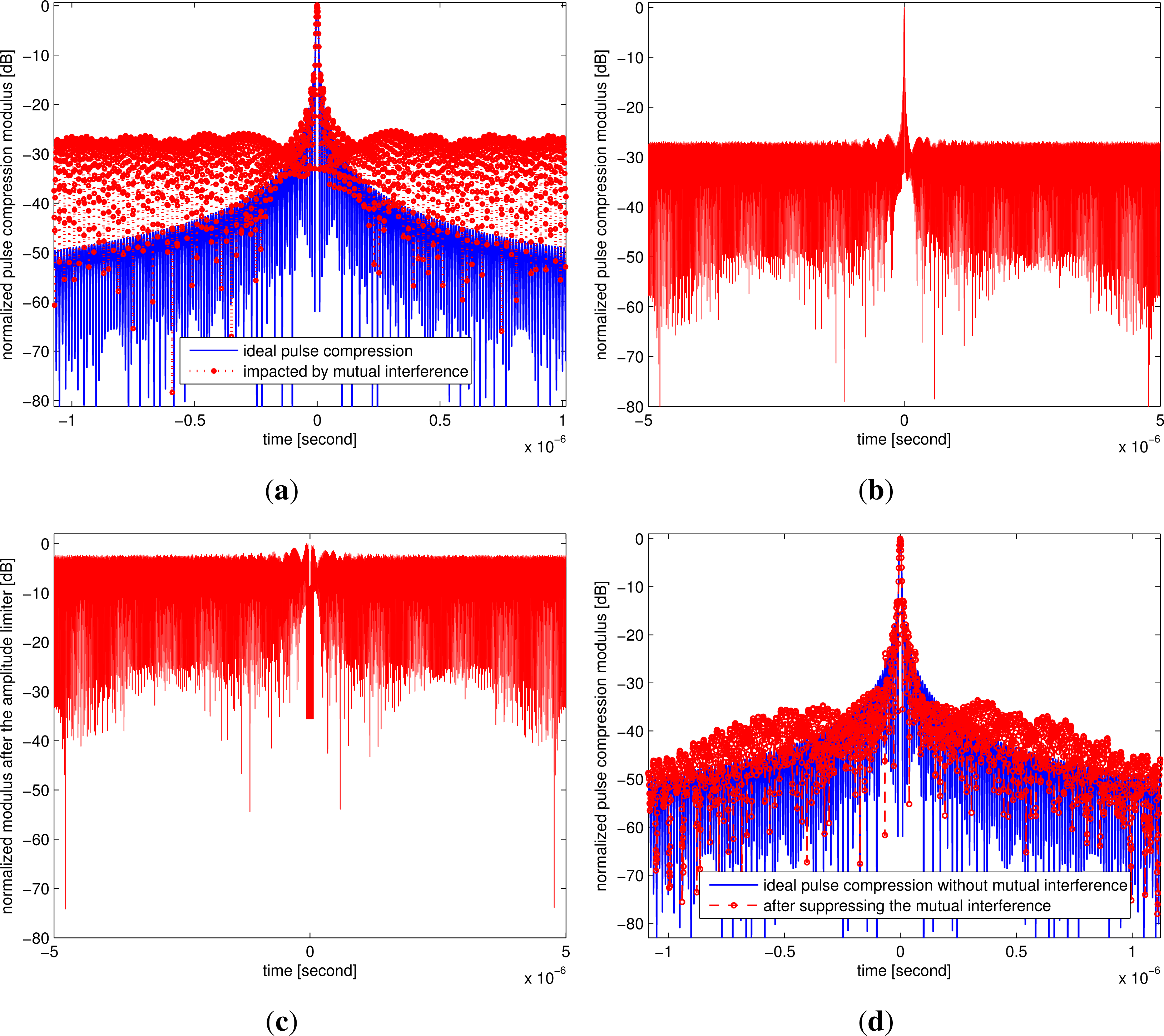
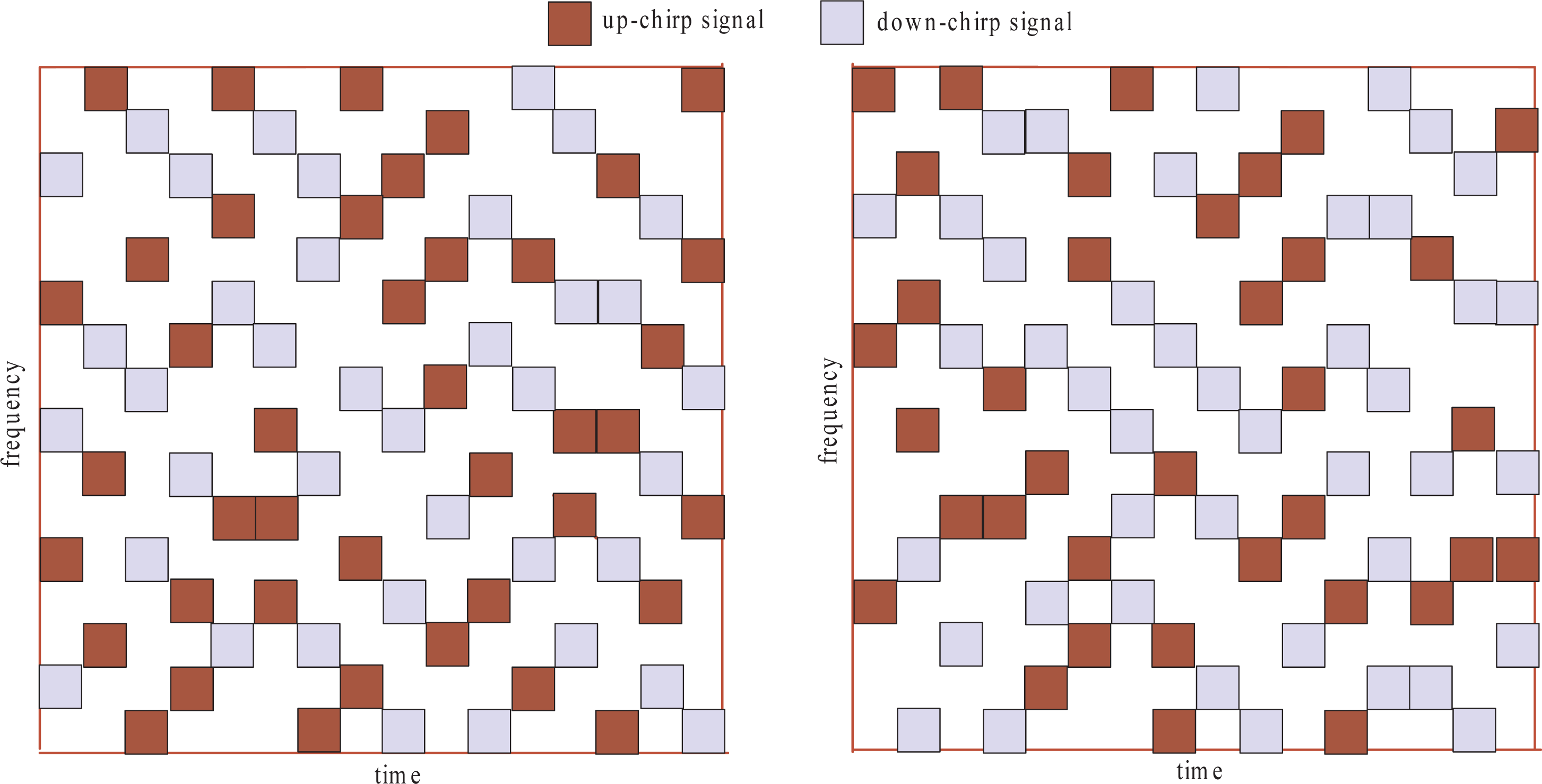
Example 1: Two Radars Using the Down-Chirp and Up-Chirp Waveforms
Example 2: Three Radars Using the Partially Overlapped or Inverse Chirp Rate Waveforms
Example 3: Two Radars Using the OFDM Chirp Waveforms
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Arik, M.; Akan, O. Collaborative mobile target imaging in UWB wireless radar sensor networks. IEEE J. Sel. Areas Commun 2010, 28, 950–961. [Google Scholar]
- Antonio, P.; Grimaccia, F.; Mussetta, M. Architecture and methods for innovative heterogeneous wireless sensor network applications. Remote Sens 2012, 4, 1146–1161. [Google Scholar]
- Qiao, G.; Lu, P.; Scaioni, M.; Xu, S.Y.; Tong, X.H.; Feng, T.T.; Wu, H.B.; Chen, W.; Tian, Y.X.; Wang, W.A.; et al. Landslide investigation with remote sensing and sensor network: From susceptibility mapping and scaled-down simulation towards in situ sensor network design. Remote Sens 2013, 5, 4319–4346. [Google Scholar]
- Liang, Q.L. Radar sensor wireless channel modeling in Foliage environment: UWB versus narrowband. IEEE Sens. J 2011, 11, 1448–1457. [Google Scholar]
- Wang, W.Q. Distributed passive radar sensor networks with near-space vehicle-borne receivers. IET Wirel. Sens. Syst 2012, 2, 183–190. [Google Scholar]
- Ouchi, K. Recent trend and advance of synthetic aperture radar with selected topics. Remote Sens 2013, 5, 716–807. [Google Scholar]
- Xu, L.; Liang, Q.L. Radar sensor network using a set of ternary codes: Theory and application. IEEE Sens. J 2011, 11, 439–450. [Google Scholar]
- Krieger, G.; Moreira, A. Spaceborne bi- and multistatic SAR: Potential and challenges. IEE Proc. Radar Sonar Navig 2006, 153, 184–198. [Google Scholar]
- Hume, A.L.; Baker, C.J. Netted Radar Sensing. Proceedings of the IEEE Radar Conference, Beijing, China, 15–18 October 2001; pp. 23–26.
- Liang, J.; Liang, Q. Design and analysis of distributed radar sensor networks. IEEE Trans. Parallel Distrib. Syst 2011, 22, 1926–1933. [Google Scholar]
- Liang, Q. Radar Sensor Networks for Automatic Target Recognition with Delay-Doppler Uncertainty. Proceedings of the IEEE Military Communication Conference, Washington, DC, USA, 23–25 October 2006; pp. 1–7.
- Wang, W.Q. GPS-based time & phase synchronization processing for distributed SAR. IEEE Trans. Aerosp. Electron. Syst 2009, 45, 1041–1052. [Google Scholar]
- Krieger, G.; Younis, M. Impact of oscillator noise in bistatic and multisatic SAR. IEEE Geosci. Remote Sens. Lett 2006, 3, 424–429. [Google Scholar]
- Foreman, T.L. A model to quantify the effects of sensitivity time control on radar radar-to-radar interference. IEEE Trans. Electromagn. Compat 1995, 37, 299–301. [Google Scholar]
- Brooker, G.M. Mutual interference of millimeter-wave radar systems. IEEE Trans. Electromagn. Compat 2007, 49, 170–181. [Google Scholar]
- Zhou, H.; Wen, B.Y.; Wu, S.C. Dense radio frequency interference suppression in HF radars. IEEE Signal Process. Lett 2005, 12, 361–364. [Google Scholar]
- Wang, W.; Wyatt, L.R. Radio frequency interference cancellation for sea-state remote sensing by high-frequency radar. IET Radar Sonar Navig 2010, 5, 2085–2099. [Google Scholar]
- Anandan, V.K.; Jagannatham, D.B.V. An automomous interference detection and filtering approach applied to wind profilers. IEEE Trans. Geosci. Remote Sens 2010, 48, 1660–1666. [Google Scholar]
- Tarongi, J.M.; Camps, A. Normality analysis for RFI detection in microwave radiometry. Remote Sens 2010, 2, 191–210. [Google Scholar]
- Elgamel, S.A.; Soraghan, J.J. Using EMD-FrFT filtering to mitigate very high power interference in chirp tracking radars. IEEE Signal Process. Lett 2011, 18, 263–266. [Google Scholar]
- Zhou, H.; Wen, B.Y. Radio frequency interference suppression in small-aperture high-frequency radars. IEEE Geosci. Remote Sens. Lett 2012, 9, 788–792. [Google Scholar]
- Thayaparan, M.D.T.; Djukanović, S.; Stanković, L.J. Time-frequency-based non-stationary interference suppression for noise radar systems. IET Radar Sonar Navig 2008, 2, 306–314. [Google Scholar]
- Gurgel, K.W.; Barbin, Y.; Schlick, T. Radio Frequency Interference Suppression Techniques in FMCW Modulated HF Radars. Proceedings of the IEEE OCEANS Conference, Aberdeen, UK, 18–21 June 2007; pp. 538–541.
- Zhou, H.; Wen, B.; Luo, Y. Radio frequency interference suppression in HF radars. Electron. Lett 2003, 39, 925–927. [Google Scholar]
- Chen, G.; Wen, B.; Wu, S.; Luo, Y. HF radio-frequency interference mitigation. IEEE Geosci. Remote Sens. Lett 2010, 7, 479–482. [Google Scholar]
- Blunt, S.D.; Gerlach, K. Multistatic adaptive pulse compression. IEEE Trans. Aerosp. Electron. Syst 2006, 42, 891–903. [Google Scholar]
- Huang, P.P. Method of removing the cross-correlation noise for dual-input and dual-output SAR. J. Radar 2012, 1, 91–95. [Google Scholar]
- Meng, C.Z.; Xu, J.; Peng, S.B.; Yang, J.; Wang, X.J.; Peng, P.Y. Suppress Cross-Correlation Noise of Same Frequency Coding Orthogonal Signals in MIMO-SAR. Proceedings of the IET International Radar Conference, Xi’an, China, 14–16 April 2013; pp. 1–6.
- Sverdlik, H.B.; Levanon, N. Family of multicarrier bi-phase radar signals represented by ternary arrays. IEEE Trans. Aerosp. Electron. Syst 2006, 42, 933–953. [Google Scholar]
- Dai, F.Z.; Liu, H.W.; Wang, P.H.; Xia, S.Z. Adaptive waveform design for range-spread target tracking. Electron. Lett 2010, 46, 793–794. [Google Scholar]
- Sen, S.; Nehorai, A. Adaptive OFDM radar for target detection in multipath scenarios. IEEE Trans. Signal Process 2011, 59, 78–90. [Google Scholar]
- Wang, W.Q.; Cai, J.Y. MIMO SAR using chirp diverse waveform for wide-swath remote sensing. IEEE Trans. Aerosp. Electron. Syst 2012, 48, 3171–3185. [Google Scholar]
- Daum, F.; Huang, J. MIMO radar: Snake oil or good idea. IEEE Aerosp. Electron. Syst. Mag 2009, 24, 8–12. [Google Scholar]
- Hassanien, A.; Vorobyov, S.A. Transmit energy focusing for DOA estimation in MIMO radar with colocated antennas. IEEE Trans. Signal Process 2011, 59, 2669–2682. [Google Scholar]
- Wang, W.Q.; Peng, Q.C.; Cai, J.Y. Waveform diversity-based millimeter-wave UAV SAR remote sensing. IEEE Trans. Geosci. Remote Sens 2009, 45, 691–700. [Google Scholar]
- Levanon, N. Multifrequency complementary phased-coded radar signal. IEE Proc. Radar Sonar Navig 2000, 147, 276–284. [Google Scholar]
- Surender, S.C.; Narayanan, R.M. UWB noise-OFDM netted radar: Physical layer design and analysis. IEEE Trans. Aerosp. Electron. Syst 2011, 47, 1380–1400. [Google Scholar]
- Garmatyuk, D.; Schuerger, J.; Morton, Y.; Binns, K.; Durbin, M.; Kimani, J. Feasibility Study of a Multi-Carrier Dual-Use Imaging Radar and Communication Systems. Proceedings of the European Radar Conference, Munich, Germany, 10–12 October 2007; pp. 194–197.
- Franken, G.; Nikookar, H.; Genderen, P.V. Doppler Tolerance of OFDM-Coded Radar Signals. Proceedings of the European Radar Conference, Manchester, UK, 13–15 September 2006; pp. 108–111.
- Wang, W.Q. Mitigating range ambiguities in high PRF SAR with OFDM waveform diversity. IEEE Geosci. Remote Sens. Lett 2013, 10, 101–105. [Google Scholar]
- Hall, G.M.; Holder, E.J.; Cohen, S.D.; Gauthier, D.J. Low-Cost Chaotic Radar Design. Proceedings of the XVI Conference on Radar Sensor Technology, Baltimore, MD, USA, 23–25 April 2012; pp. 836112:1–836112:13.











© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Wang, W.-Q.; Shao, H. Radar-to-Radar Interference Suppression for Distributed Radar Sensor Networks. Remote Sens. 2014, 6, 740-755. https://doi.org/10.3390/rs6010740
Wang W-Q, Shao H. Radar-to-Radar Interference Suppression for Distributed Radar Sensor Networks. Remote Sensing. 2014; 6(1):740-755. https://doi.org/10.3390/rs6010740
Chicago/Turabian StyleWang, Wen-Qin, and Huaizong Shao. 2014. "Radar-to-Radar Interference Suppression for Distributed Radar Sensor Networks" Remote Sensing 6, no. 1: 740-755. https://doi.org/10.3390/rs6010740