Mapping Forest Degradation due to Selective Logging by Means of Time Series Analysis: Case Studies in Central Africa


Abstract
:1. Introduction
2. State-of-the-Art
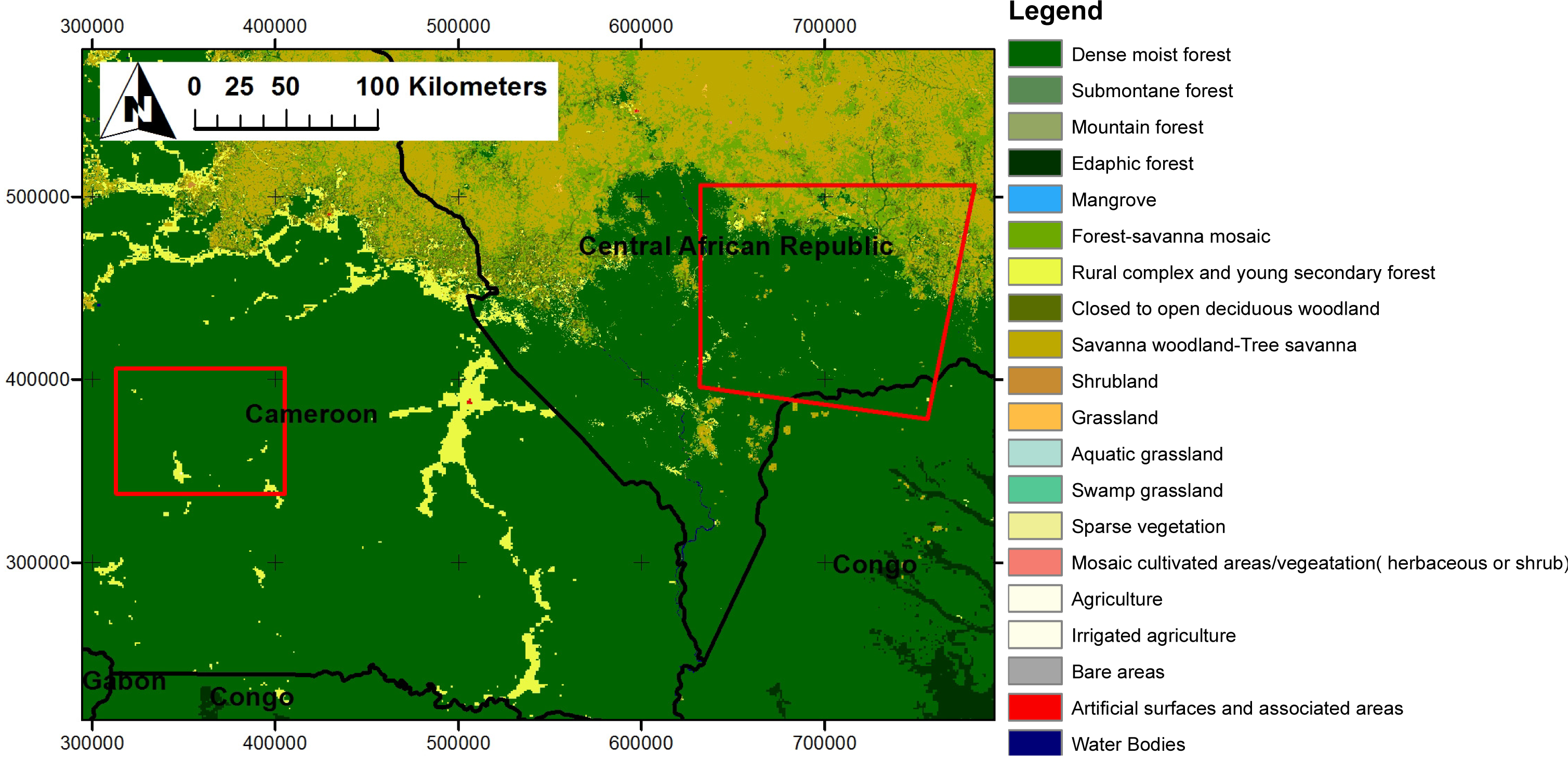
3. Data and Study Sites
4. Methods
4.1. Data Preprocessing and Feature Selection
4.2. Multi-Temporal Classification
5. Results and Discussion
5.1. Feature Selection Results
5.2. Typical Temporal Curves of Degradation Patterns
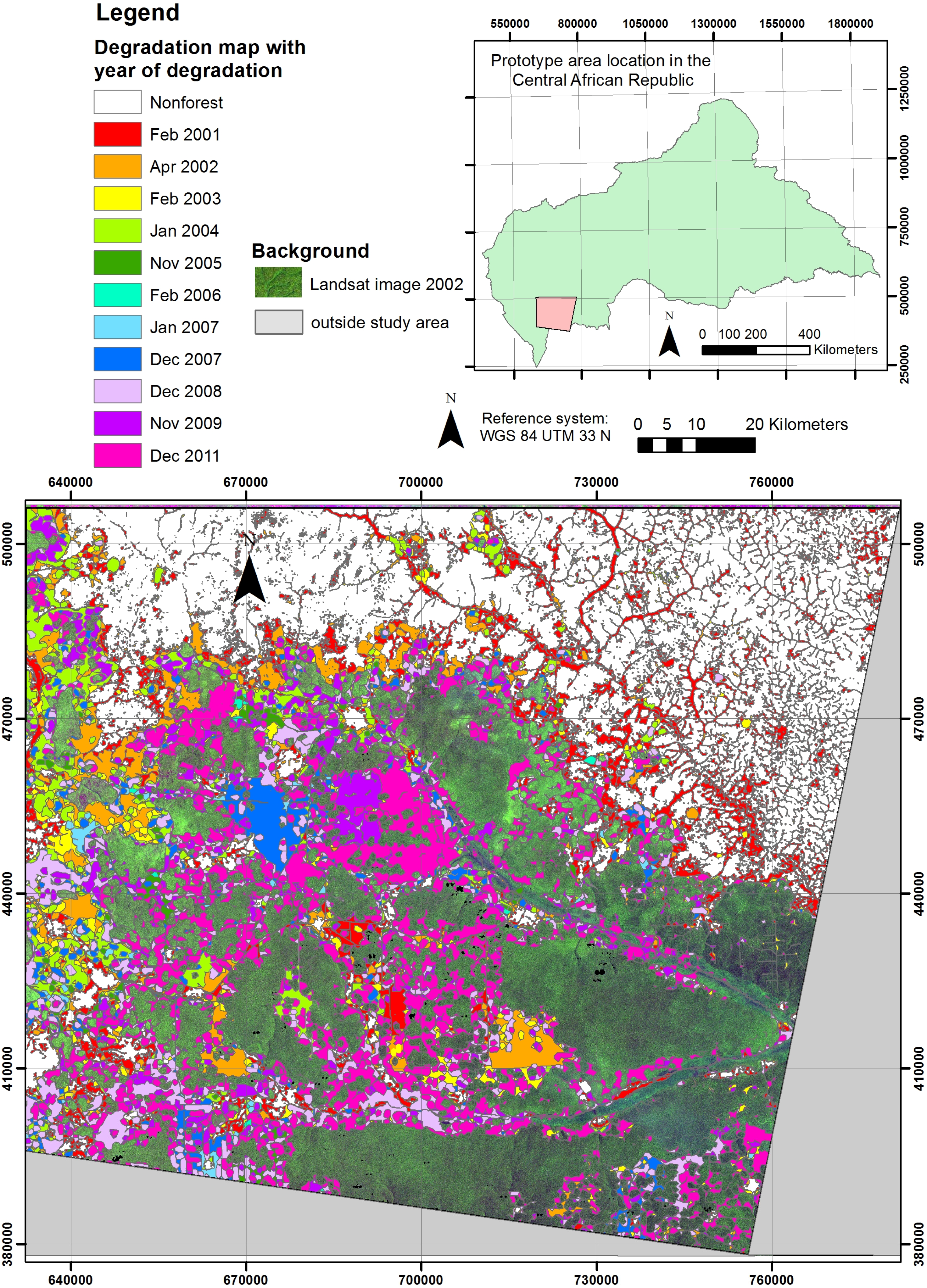
5.3. Results of Multi-Temporal Classification
6. Conclusions and Outlook
Acknowledgments
Conflicts of Interest
References
- Nepstad, D.C.; Verissimo, A.; Alencar, A.; Nobre, C.; Lima, E.; Lefebvre, P.; Schlesinger, P.; Potter, C.; Moutinho, P.; Mendoza, E. Large-scale impoverishment of Amazonian forests by logging and fire. Nature 1999, 398, 505–508. [Google Scholar]
- Collomb, J.-G.; Mikissa, J.-B.; Minnemeyer, S.; Mundunga, S.; Nzao, N.H.; Madouma, J.; de Mapaga, J.D.; Mikolo, C.; Rabenkogo, N.; Akagah, S.; et al. First look at logging in Gabon. Available online: http://www.globalforestwatch.org/common/gabon/english/report.pdf (accessed on 24 April 2012).
- Cochrane, M.A.; Skole, D.L.; Matricardi, E.A.T.; Barber, C.; Chomentowski, W. Selective Logging, Forest Fragmentation and Fire Disturbance: Implications of Interaction and Synergy for Conservation. In Working Forests in the Neotropics: Conservation through Sustainable Management; Columbia University Press: New York, NY, USA, 2004; pp. 301–324. [Google Scholar]
- Nasi, R.; VanVliet, N. Case Studies on Measuring and Assessing Forest Degradation: Defaunation and Forest Degradation in Central African Logging Concession: How to Measure the Impacts of Bushmeat Hunting on the Ecosystem. Available online: http://www.fao.org/docrep/012/k7178e/k7178e00.pdf (accessed on 21 December 2013).
- Potapov, P.; Yaroshenko, A.; Turubanova, S.; Dubinin, M.; Laestadius, L.; Thies, C.; Aksenov, D.; Egorov, A.; Yesipova, Y.; Glushkov, I.; et al. Mapping the world’s intact forest landscapes by remote sensing. Ecol. Soc 2008, 13, 51. [Google Scholar]
- FAO. Forests and Climate Change Working Paper. Available online: http://www.fao.org/docrep/009/j9345e/j9345e08.htm (accessed on 21 December 2013).
- GOFC-GOLD (Global Observation of Forest and Land Cover Dynamics). A Sourcebook of Methods and Procedures for Monitoring and Reporting Anthropogenic Greenhouse Gas Emissions and Removals Associated with Deforestation, Gains and Losses of Carbon Stocks in Forests Remaining Forests, and Forestation; GOFC-GOLD Land Cover Project Office, Wageningen University: Wageningen, The Netherlands, 2012. [Google Scholar]
- Stone, T.A.; Lefebvre, P. Using multi-temporal satellite data to evaluate selective logging in Para, Brazil. Int. J. Remote Sens 1998, 19, 2517–2526. [Google Scholar]
- Duveiller, G.; Defourny, P.; Desclée, B.; Mayaux, P. Deforestation in central africa: Estimates at regional, national and landscape levels by advanced processing of systematically-distributed landsat extracts. Remote Sens. Environ 2008, 112, 1969–1981. [Google Scholar]
- Laporte, N.T.; Stabach, J.A.; Grosch, R.; Lin, T.S.; Goetz, S.J. Expansion of industrial logging in Central Africa—Supporting online material. Science 2007. [Google Scholar] [CrossRef]
- de Wasseige, C.; Defourny, P. Remote sensing of selective logging impact for tropical forest management. For. Ecol. Manag 2004, 188, 161–173. [Google Scholar]
- Deutscher, J.; Perko, R.; Gutjahr, K.; Hirschmugl, M.; Schardt, M. Mapping tropical rainforest canopy disturbances in 3D by COSMO-SkyMed spotlight InSAR-Stereo data to detect areas of forest degradation. Remote Sens 2013, 5, 648–663. [Google Scholar]
- Asner, G.P.; Knapp, D.E.; Cooper, A.N.; Bustamente, M.M.C.; Olander, L.P. Ecosystem structure throughout the Brazilian Amazon from Landsat observations and automated spectral unmixing. Earth Interact 2005, 9, 1–31. [Google Scholar]
- Souza, C.M.; Roberts, D.A.; Cochrane, M.A. Combining spectral and spatial information to map canopy damage from selective logging and forest fires. Remote Sens. Environ 2005, 98, 329–343. [Google Scholar]
- Asner, G.P.; Keller, M.; Pereira, R.; Zweede, J.C. Remote sensing of selective logging in Amazonia assessing limitations based on detailed field observations, Landsat ETM+, and textural analysis. Remote Sens. Environ 2002, 80, 483–496. [Google Scholar]
- Souza, C.M.; Roberts, D.A.; Monteiro, A.L. Multitemporal analysis of degraded forests in the Southern Brazilian Amazon. Earth Interact 2005, 9, 1–25. [Google Scholar]
- Jackson, R.D.; Huete, A.R. Interpreting vegetation indices. Prev. Vet. Med 1991, 11, 185–200. [Google Scholar]
- Asner, G.P.; Hicke, J.A.; Lobell, D.B. Per-Pixel Analysis of Forest Structure: Vegetation Indices, Spectral Mixture Analysis and Canopy Reflectance Modeling. In Remote Sensing of Forest Environments: Concepts and Case Studies; Springer: New York, NY, USA, 2003; pp. 209–254. [Google Scholar]
- Al Mohamed, I. Erfassung und Bewertung von degradierten Böden mit Fernerkundung und GIS in Nordwest-Syrien. Technical University of Dresden, Dresden, Germany, 2011. [Google Scholar]
- Matricardi, E.A.T.; Skole, D.L.; Pedlowski, M.A.; Chomentowski, W.; Fernandes, L.C. Assessment of tropical forest degradation by selective logging and fire using landsat imagery. Remote Sens. Environ 2010, 114, 1117–1129. [Google Scholar]
- Thenkabail, P.S.; Enclona, E.A.; Ashton, M.S.; Legg, C.; de Dieu, M.J. Hyperion IKONOS, ALI, and ETM+ sensors in the study of African rainforests. Remote Sens. Environ 2004, 90, 23–43. [Google Scholar]
- Ponzoni, F.J.; Galvao, L.S.; Liesenberg, V.; Santos, J.R. Impact of multi-angular CHRIS/PROBA data on their empirical relationships with tropical forest biomass. Int. J. Remote Sens 2010, 31, 5257–5273. [Google Scholar]
- Souza, C.; Barreto, P. An alternative approach for detecting and monitoring selectively logged forests in the Amazon. Int. J. Remote Sens 2000, 21, 173–179. [Google Scholar]
- Asner, G.P. The Carnegie Landsat Analysis System (Version 1.0 21); Asner Lab: Stanford, CA, USA, 2005. [Google Scholar]
- Haas, S. Monitoring Forest Degradation for Redd in Cameroon. University of Karlsruhe, Karlsruhe, Germany, 2009. [Google Scholar]
- Sanderson, E.W.; Jaiteh, M.; Levy, M.A.; Redford, K.H.; Wannebo, A.V.; Woolmer, G. The human footprint and the last of the wild. BioScience 2002, 52, 891–904. [Google Scholar]
- Bontemps, S.; Langner, A.; Defourny, P. Monitoring forest changes in borneo on a yearly basis by an object-based change detection algorithm using spot-vegetation time series. Int. J. Remote Sens 2012, 33, 4673–4699. [Google Scholar]
- Verbesselt, J.; Zeileis, A.; Herold, M. Near real-time disturbance detection using satellite image time series: Drought detection in Somalia. Remote Sens. Environ 2012, 123, 98–108. [Google Scholar]
- Koltunov, A.; Ustin, S.L.; Asner, G.P.; Fung, I. Selective logging changes forest phenology in the Brazilian Amazon: Evidence from MODIS image time series analysis. Remote Sens. Environ 2009, 113, 2431–2440. [Google Scholar]
- Eklundh, L.; Johansson, T.; Solberg, S. Mapping insect defoliation in Scots pine with MODIS time-series data. Remote Sens. Environ 2009, 113, 1566–1573. [Google Scholar]
- Jin, S.; Sader, S.A. MODIS time-series imagery for forest disturbance detection and quantification of patch size effects. Remote Sens. Environ 2005, 99, 462–470. [Google Scholar]
- Margono, B.A.; Turubanova, S.; Zhuravleva, I.; Potapov, P.; Tyukavina, A.; Baccini, A.; Goetz, S.; Hansen, M.C. Mapping and monitoring deforestation and forest degradation in sumatra (Indonesia) using Landsat time series data sets from 1990 to 2010. Environ. Res. Lett 2012, 7, 1–16. [Google Scholar]
- Healey, S.; Moisen, R.; Masek, J.; Cohen, W.; Goward, S.; Powell, S.; Nelson, M.; Jacobs, D.; Lister, A.; Kennedy, R.; et al. Measurement of Forest Disturbance and Regrowth with Landsat and Forest Inventory and Analysis Data: Anticipated Benefits from Forest and Inventory Analysis? Proceedings of the Seventh Annual Forest Inventory and Analysis Symposium, Portland, OR, USA, 3–6 October 2005; pp. 171–178.
- Kennedy, R.E.; Cohen, W.B.; Schroeder, T.A. Trajectory-based change detection for automated characterization of forest disturbance dynamics. Remote Sens. Environ 2007, 110, 370–386. [Google Scholar]
- Kennedy, R.E.; Yang, Z.; Cohen, W.B. Detecting trends in forest disturbance and recovery using yearly Landsat time series: 1. LandTrendr—Temporal segmentation algorithms. Remote Sens. Environ 2010, 114, 2897–2910. [Google Scholar]
- Huang, C.; Goward, S.N.; Masek, J.G.; Thomas, N.; Zhu, Z.; Vogelmann, J.E. An automated approach for reconstructing recent forest disturbance history using dense Landsat time series stacks. Remote Sens. Environ 2010, 114, 183–198. [Google Scholar]
- Brooks, E.B.; Wynne, R.H.; Thomas, V.A.; Blinn, C.E.; Coulston, J.W. On-the-fly massively multitemporal change detection using statistical quality control charts and landsat data. IEEE Trans. Geosci. Remote Sens 2013, 1–17. [Google Scholar]
- Zhu, Z.; Woodcock, C.E.; Olofsson, P. Continuous monitoring of forest disturbance using all available Landsat imagery. Remote Sens. Environ 2012, 122, 75–91. [Google Scholar]
- Mertens, B.; Steil, M.; Nsoyuni, L.A.; Shu, G.N.; Minnemeyer, S. Interactive Forestry Atlas of Cameroon (Version 2.0). http://www.wri.org/publication/interactive-forestry-atlas-cameroon-version-2-0 (accessed on 16 February 2009).
- Verhegghen, A.; Mayaux, P.; de Wasseige, C.; Defourny, P. Mapping Congo Basin vegetation types from 300 m and 1 km multi-sensor time series for carbon stocks and forest areas estimation. Biogeosciences 2012, 9, 5061–5079. [Google Scholar] [Green Version]
- GSE FM REDD (GMES Service Elements for Forest Monitoring—Extensions for REDD). Available online: http://www.redd-services.info/content/gse-fm-redd (accessed on 21 December 2013).
- Schmitt, U.; Deutscher, J. Integration to REDD Toolbox; GSE-REDD-TN1-RT-Ph2; Joanneum Research: Graz, Austria, 2012. [Google Scholar]
- Pereira, R.; Zweede, J.; Asner, G.P.; Keller, M. Forest canopy damage and recovery in reduced-impact and conventional selective logging in eastern Para, Brazil. For. Ecol. Manag 2002, 168, 77–89. [Google Scholar]
- Asner, G.P.; Keller, M.; Pereira, R.; Zweede, J.C.; Silva, J.N.M. Canopy damage and recovery after selective logging in Amazonia: Field and satellite studies. Ecol. Appl 2004, 14, 280–298. [Google Scholar]
- Fichet, L.; Sannier, C. Development of an Operational System for Monitoring Forest Cover at National Scale in 1990, 2000 and 2010. Proceedings of the XV Symposium SELPER, Cayenne, France, 19–23 November 2012.
- Bossard, M.; Feranec, J.; Otahel, J. CORINE Land Cover Technical Guide—Addedum 2000; European Environment Agency: Copenhagen, Denmark, 2000. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Acquisition Date | Extent | Used for |
|---|---|---|---|
| Test Area Cameroon | |||
| Landsat ETM+ | 5 December 2000 | 6,356 km2 | Time series mapping |
| Landsat ETM+ | 25 January 2002 | ||
| Landsat ETM+ | 27 December 2002 | ||
| Landsat SLC-off | 7 April 2005 | ||
| Landsat SLC-off | 20 January 2006 | ||
| Landsat SLC-off | 7 January 2007 | ||
| Landsat SLC-off | 25 December 2007 | ||
| Landsat SLC-off | 27 December 2008 | ||
| Landsat SLC-off | 30 December 2009 | ||
| Landsat SLC-off | 17 December 2010 | ||
| Landsat SLC-off | 18 January 2011 | ||
| Landsat SLC-off | 26 April 2012 | ||
| Quickbird | 27 November 2007 | 6.2 × 5.7 km | Training and accuracy assessment |
| Quickbird | 30 May 2008 | 8 × 11.2 km | |
| Quickbird | 2 December 2010 | 5 × 5 km | |
| Worldview-2 | 12 June 2012 | 8.5 × 11.7 km | |
| Test Area CAR | |||
| Landsat ETM+ | 9 February 2001 | 16,702 km2 | Time series mapping |
| Landsat ETM+ | 1 April 2002 | ||
| Landsat ETM+ | 15 February 2003 | ||
| Landsat SLC-off | 1 January 2004 | ||
| Landsat SLC-off | 19 November 2005 | ||
| Landsat SLC-off | 7 February 2006 | ||
| Landsat SLC-off | 9 January 2007 | ||
| Landsat SLC-off | 27 December 2007 | ||
| Landsat SLC-off | 29 December 2008 | ||
| Landsat SLC-off | 30 November 2009 | ||
| Landsat SLC-off | 6 December 2011 | ||
| Worldview | 6 January 2011 | 5 × 5 km | Accuracy assessment |
| Quickbird | 4 March 2010 | 5 × 5 km | |
| Quickbird | 26 March 2011 | 5 × 5 km | |
| Quickbird | 18 March 2011 | 5 × 3.5 km | |
| Feature | Correlation Landsat—VHR 2010 (R2) |
|---|---|
| SMA 45 Soil fraction | 0.56 |
| NDII7 (Normalized Difference Infrared Index with Landsat band 7) | 0.55 |
| TVI (Transformed Vegetation Index) | 0.52 |
| SAVI (Soil-Adjusted Vegetation Index) | 0.47 |
| NDVI (Normalized Difference Vegetation Index) | 0.47 |
| NDII5 (Normalized Difference Infrared Index with Landsat band 5) | 0.35 |
| Band 3 (red) | 0.30 |
| Band 5 (short wave infrared) | 0.19 |
| Band 4 (near infrared) | 0.07 |
| mNDFI (Modified Normalised Difference Fraction Index) | 0.05 |
| RVI (Ratio-Vegetation Index) | 0.00 |
| GEMI (Global Environment Monitoring Index) | 0.00 |
| Reference | |||||
|---|---|---|---|---|---|
| Undegraded Forest | Degraded Forest | Total | User's Accuracy | ||
| Classification | Undegraded forest | 697 | 25 | 722 | 96.5% |
| Degraded forest | 100 | 200 | 300 | 66.7% | |
| Total | 797 | 225 | 1,022 | ||
| Producer's accuracy | 87.5% | 88.9% | Overall accuracy: 87.8% Kappa coefficient: 0.68 | ||
| Reference | |||||
|---|---|---|---|---|---|
| Undegraded Forest | Degraded Forest | Total | User's Accuracy | ||
| Classification | Undegraded forest | 421 | 24 | 445 | 94.6% |
| Degraded forest | 44 | 114 | 158 | 72.2% | |
| Total | 465 | 138 | 603 | ||
| Producer's accuracy | 90.5% | 82.6% | Overall accuracy: 88.7% Kappa coefficient: 0.7 | ||
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Hirschmugl, M.; Steinegger, M.; Gallaun, H.; Schardt, M. Mapping Forest Degradation due to Selective Logging by Means of Time Series Analysis: Case Studies in Central Africa. Remote Sens. 2014, 6, 756-775. https://doi.org/10.3390/rs6010756
Hirschmugl M, Steinegger M, Gallaun H, Schardt M. Mapping Forest Degradation due to Selective Logging by Means of Time Series Analysis: Case Studies in Central Africa. Remote Sensing. 2014; 6(1):756-775. https://doi.org/10.3390/rs6010756
Chicago/Turabian StyleHirschmugl, Manuela, Martin Steinegger, Heinz Gallaun, and Mathias Schardt. 2014. "Mapping Forest Degradation due to Selective Logging by Means of Time Series Analysis: Case Studies in Central Africa" Remote Sensing 6, no. 1: 756-775. https://doi.org/10.3390/rs6010756