1. Introduction
With the rapidly increasing importance of time series in remote sensing applications the need for robust change detection on multi-temporal acquisitions is increasing likewise. Synthetic Aperture Radar on the one hand is an ideal sensor because of its capability of illumination and weather independent image acquisition. On the other hand, the high noise content due to the presence of deterministic multiplicative and stochastic additive noise complicates image interpretation and, thus, image comparison as well. Robust image comparison—often referred to as change detection—is the key to any monitoring purpose in the context of remote sensing applications. Visual image comparison by a human interpreter discards because of the high amount of data. Therefore, automated methods have to be developed that extract distinct changes out of a huge amount of data points.
Concerning the field of application three types can be distinguished according to [
1]: land cover monitoring, land use monitoring, and damage mapping. While land cover monitoring cares for seasonal changes in vegetated areas (mainly slow changes in large areas), land use monitoring addresses human activities that change the environment (more structured changes in shorter time periods). Damage assessment focusses on sudden changes caused by natural disasters that can adopt any geometric form. In this context, our Curvelet-based approach is designed especially for land use monitoring and damage assessment because of its sensitivity for stronger structural changes as expected with anthropogenic activities, though seasonal changes can be analyzed as well.
Regarding the change detection algorithm the data base for making the decision “change” or “no change” plays an important role. Again three types have been mentioned in literature so far: pre-, para-, and post-classification techniques [
1] at which the classification can be supervised or unsupervised depending on whether training areas are available or not. Starting with the latter ones, both input images are classified separately and the resulting pixel- or segment-based features are compared [
2]. This approach requires a most reliable feature identification algorithm in order to avoid false alarms [
3]. The term para-classification change detection denotes the joint classification of an image pair, thus the input images are segmented and classified simultaneously. As the identification of similarities and differences is performed during the classification process the reliability increases slightly. The pre-classification techniques comprise all approaches that detect changes from the image data directly before any segmentation or classification step is performed. All of the following approaches—including the Curvelet-based change detection—can be numbered among this group.
The crucial point of the direct image comparison is the noise handling. Due to SAR image characteristics the mixture of additive and multiplicative noise contributions cause a very high false alarm rate when comparing two images pixel by pixel. There are different ways to overcome this problem. One may add further information layers to the mostly used logarithmic intensity quotient (briefly “log-ratio”)—like correlation [
4] or coherence [
5]—or take into account larger patches to feed the statistical models [
3]. In this context a wide range of so-called random field algorithms—iteratively trying to find an optimal solution for a given image subset—has been developed and published [
1,
6,
7]. Others envisage a sophisticated statistical modeling of the noise components based on common speckle models [
8–
11] often requiring a higher number of looks and, thus, a reduced geometric resolution. A quite new and still more theoretical way is the comparison of a real-noise affected-SAR image with a synthetic-quasi noise free- reference in order to simplify the noise model. With respect to the field of application this synthetic reference image is either simulated using a high resolution DEM for urban applications [
12,
13] or combined out of a large number of multi-aspect SAR acquisitions (e.g., multi-temporal and different imaging geometries) to balance seasonal, as well as SAR illumination effects in land cover monitoring [
14]. As those methods are very specialized in a certain field of application, they are quite often restricted to their original purpose.
In order to develop more flexible change detection tools the logarithmic intensity quotient was investigated in terms of scale-dependent characteristics by the help of the wavelet transform [
15,
16]. Though using different statistical instruments, the crucial point that mostly is carried out by interactive parameter tuning still is the selection of the appropriate scale for the reliable change detection. To this effect, the wavelet-based methods are similar to the adaptive filtering of the difference image already mentioned in [
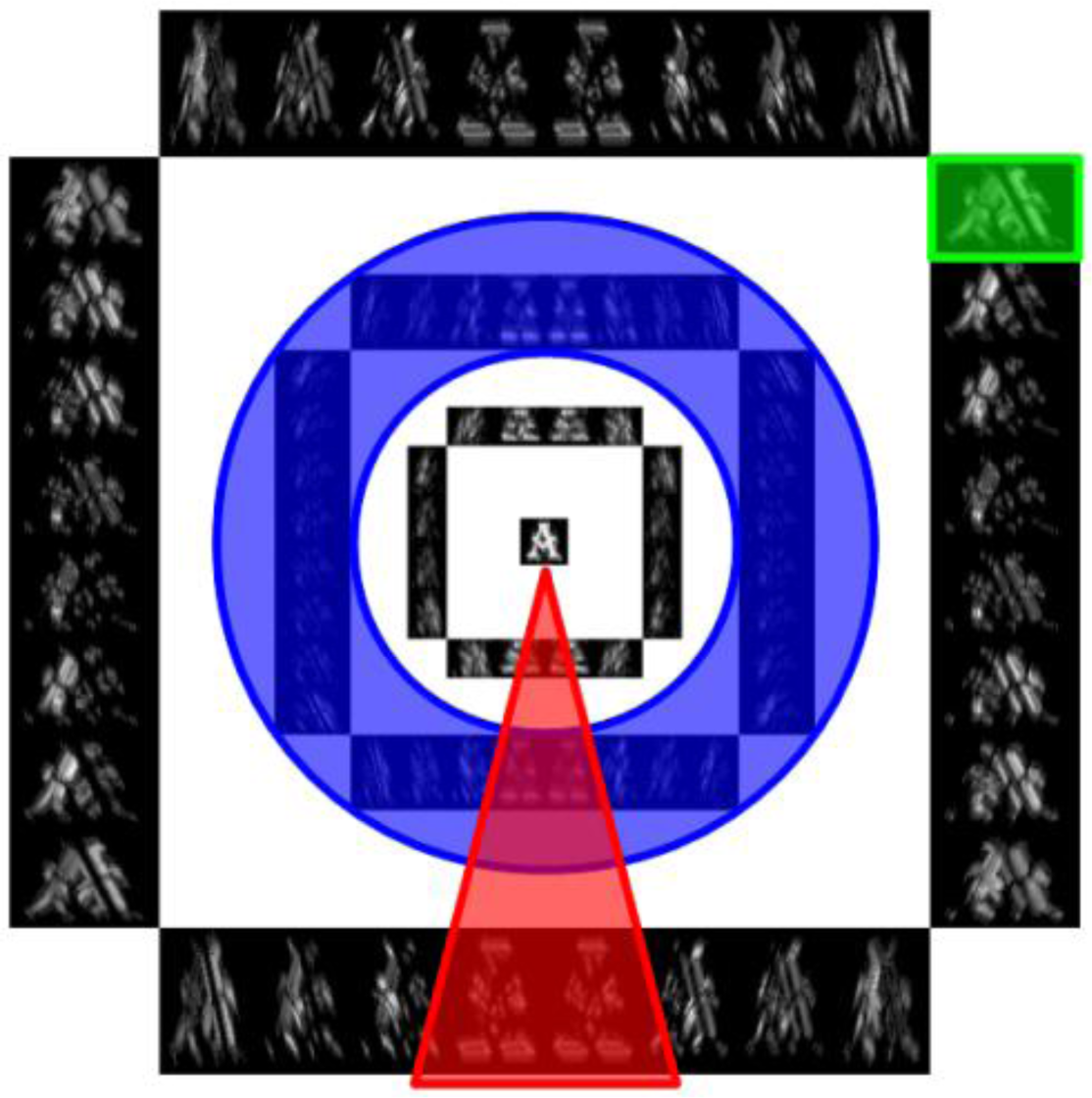
3]. The common problem of these methods is the detection of structural changes in an image—the logarithmic intensity quotient—that has no apparent structures due to the very high noise content. Therefore, the Curvelet-based approach starts with the detection of structures in the original images and proceeds with their comparison in the coefficient domain, but without any classification step common to para- and post-classification change detection algorithms. The multi-scale and multi-directional image description by the help of Curvelets is designed to describe linear features in an optimum way [
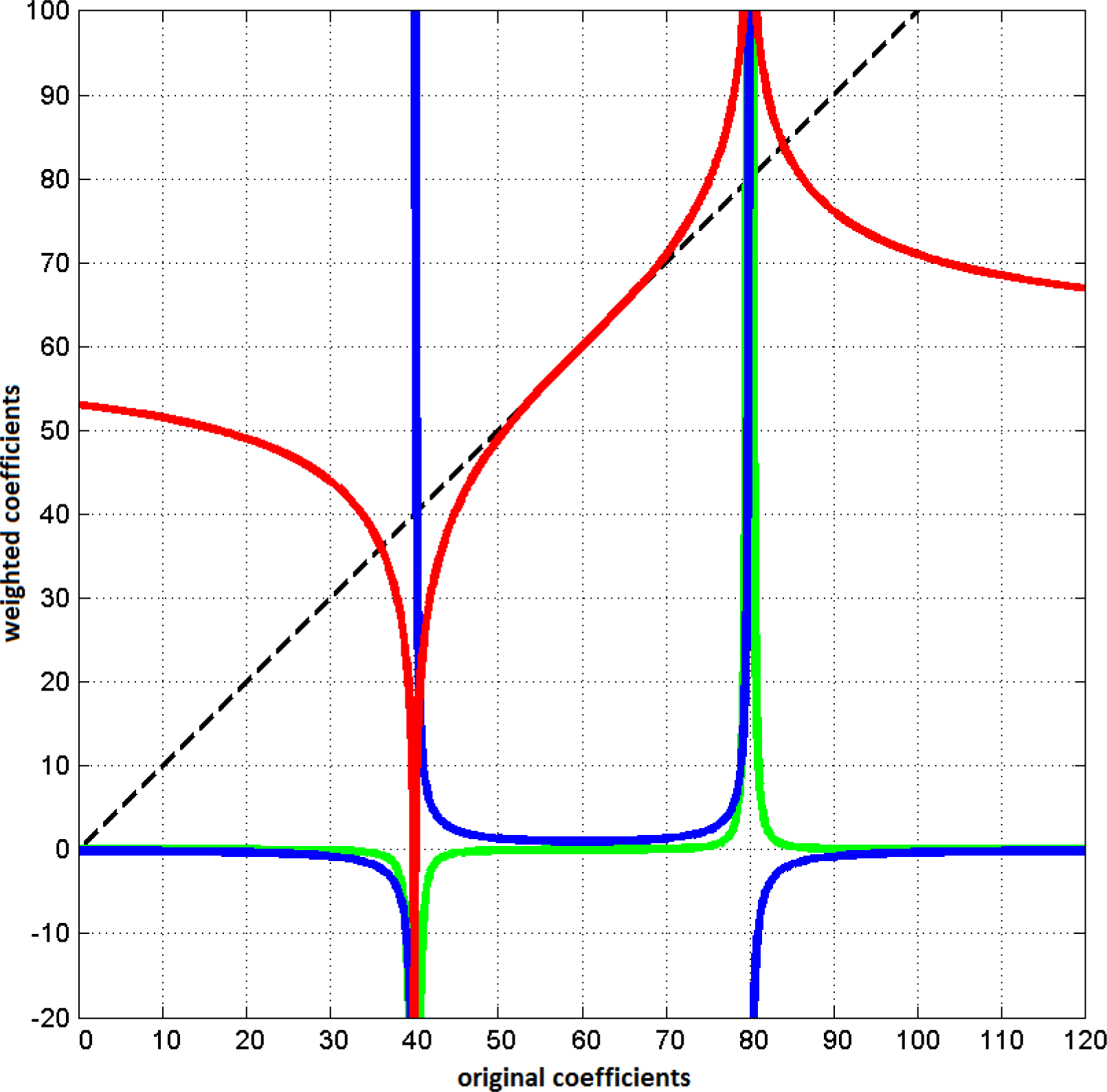
17]. Significant features are indicated by high coefficient amplitudes. Hence, in our approach the Curvelet representation only has to be reduced to a subset of the strongest coefficients which equals an image compression. Occurring artifacts are then suppressed by introducing a weighting function that smoothes the transition from rejected to maintained coefficients. Though, the output image still is continuous, it easily can be classified into significant and non-significant changes by simple thresholding the strength of the changes because unstructured noise is already completely removed.
Recently, another study dealing with time series and Curvelets was published [
18]. Although the input data as well as the tools look similar at first glance, there are striking differences that should be mentioned in the following. The aim of [
18] is to reduce a large amount of multi-temporal images to a minimum layer stack containing all the distinct changes occurring in the test site while our approach is designed for the robust and reliable comparison of two images, thus, it is a pure image processing. The Curvelet and Wavelet coefficients in [
18] are exclusively used to highlight structures in the images. Instead of comparing the coefficients directly and independently of their scale, orientation, or location—like we do—only the similarity of their distributions is checked for every sub-band separately which seems to be very intricate. Beyond that, the change itself is computed on pixel level—in the traditional way—in [
18], while we transfer for the first time ever the image comparison completely to the coefficient domain of an alternative image representation. Although the feature selection in [
18] and our image enhancement step perform in a comparative way—the reduction of the number of Curvelet coefficients—our approach excels in the use of a sophisticated weighting function for efficient artifact suppression. Thus, we are able to present for the first time an innovative Curvelet-only-based approach for image comparison and subsequent image enhancement that turns out to be an ideal tool for change detection in multi-temporal SAR imagery.
Our paper is organized as follows: In Section 2 the methodology comprising Curvelet-based change measure as well as the Curvelet-based image enhancement is introduced. The actual work flow and its validation towards standard techniques and human interpreters are summarized in Section 3. Section 4 gives a practical example for the use of our Curvelet-based change detection. The conclusions can be found in Section 5.
3. Validation
This chapter investigates the reliability of our new Curvelet-based change detection approach. The validation of SAR change detection results in general is a very challenging task. Regardless of the field of application any measurements should be validated with respect to a method that is known to be more accurate in the order of at least one magnitude. In the case of space-borne SAR sensors only SAR systems at the same wavelength, but with a much higher geometric resolution and a lower noise floor could deliver comparable results, e.g., air-borne SAR sensors. Unfortunately, because of the much lower altitude the incidence angle range is wider with air-borne sensors and it is well-known that the incidence angle has an important impact on the measurement that can only be corrected for isotropic and non-dispersive targets. Thus, even for an air-borne reference acquired simultaneously from the same looking direction systematic deviations cannot be eliminated. Although taking into account other data sources like optical images or in situ data would promise highly accurate information the validation would always compare the different acquisition techniques as well, e.g., optical versus radar. As we aim at validating the Curvelet-based approach against other image interpretation techniques we decided in favor of a reference produced by experienced human SAR interpreters. Additionally, two common automated techniques, the simple log-ratio and the log-ratio of GMAP filtered original images are mentioned as well. For the sake of convenience one 512 × 512 pixel subset of the HH amplitude of two high resolution spotlight enhanced ellipsoid corrected products acquired by TerraSAR-X over the industrial harbor of Mannheim (Germany) on 21 September 2008, and 2 October 2008, respectively (© DLR 2008) is chosen as input though the processing of the whole scene would also be possible. Both workflows—of the automated and of the manual procedure—are explained in the following. The results of the comparison conclude this chapter.
3.1. Automated Change Detection
The workflow of the automated approach is given in
Figure 11. The procedure starts with the overlapping parts of two geocoded images (
cf. [
29]). Thanks to the high quality of the orbit data, no further co-registration step is necessary for amplitude based change detection as reported in [
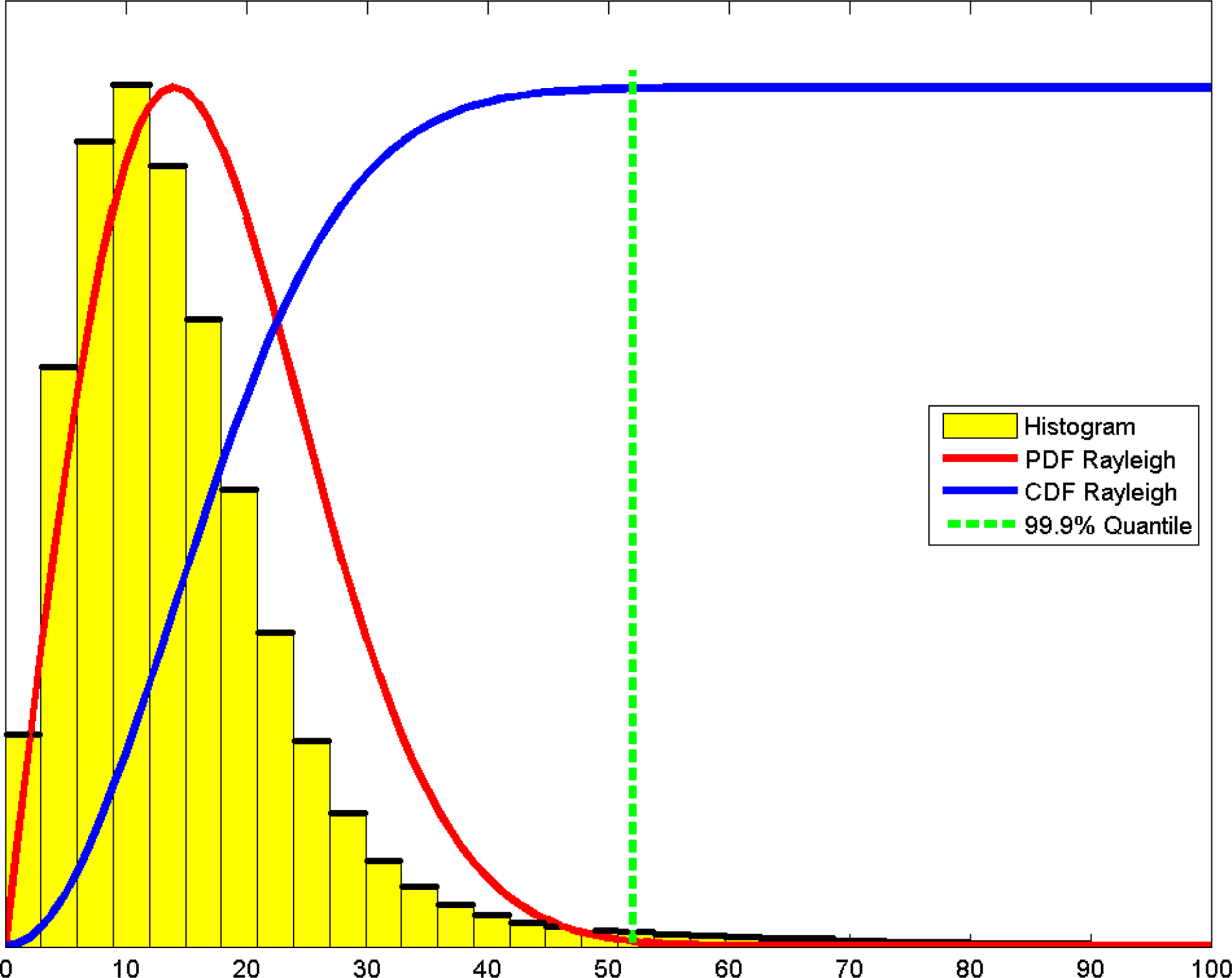
30]. The logarithmic intensities of these subsets are transformed into Curvelet coefficients and differentiated in order to generate the change image. The differential coefficients are subsequently weighted by the modified area hyperbolic tangent function derived above with the lower border at 1% and the upper border at 1‰,
i.e., in theory 99% of the coefficient are completely removed and only 1‰ of the coefficients remain unchanged, while all coefficients in-between (from 99.0% to 99.9%) are weighted continuously. Afterwards the change image is transformed back from the coefficient to the spatial domain. Both transformations are performed by MATLAB implementations available at [
31] automatically selecting the appropriate number of subbands, rotations, and locations for the optimal image description with respect to the image dimensions. In the case of the standard techniques the change image is directly generated as log-ratio of the input images with or without additional speckle suppression.
Figure 12 displays a color composition of the original amplitude images that will be used for manual classification later on. This test site is deliberately chosen because of the presence of numerous deterministic scatterers that move in-between the two acquisitions which simplifies the manual change detection by operators. Human interpreters still providing the most reliable reference we decided to choose this relatively simple scenario. In order to compare our new approach to standard techniques the pixel-based log-ratios of the radiometrically enhanced TerraSAR-X images [
32] incorporating approximately five looks with and without supplementary speckle suppression using the GMAP filter [
33] are considered as well, see
Figures 13 and
14. The results of our automated change detection approach—performed in 15 seconds by a MATLAB implementation on a SPARC-SOLARIS server—are shown in
Figure 15. Obviously only few distinct structural changes remain after coefficient weighting. Small-scale changes mainly caused by noise are completely removed while the standard techniques (
Figures 13 and
14) still deliver numerous small change patterns mainly on open water surfaces. The continuous change image is classified as follows: less than −10 dB equals negative change (in blue), more than +10 dB equals positive change (in red), otherwise no change detected (transparent). The high threshold of 10 dB—corresponding to an increase to ten times or a decrease to the tenth of the original value—is adequate because it is hard for human interpreters to recognize lower changes on the one hand. And on the other hand, as the scene covers mostly changes on deterministic targets, it is far sufficient,
i.e., lower more sensitive thresholds are not necessary.
3.2. Manually-Derived Reference
The combined image in
Figure 12 is given to five SAR experts who are asked to mark positive as well as negative changes. According to the color composition positive changes appear in orange and negative changes in blue while gray tones indicate similar backscattering values for both acquisitions. If the images were compared visually using neither overlaying nor color coding, no difference could be recognized. The time needed for the classification was about 15 min. As the five manually-derived results are not identical, the mode (majority) was chosen as reference,
i.e., if three or more interpreters agree that a pixel has changed in a certain direction, this change is accepted, see
Figure 16. Obviously the class “stable” (
i.e., no change) dominates as expected. Increases and decreases in the amplitude data appear nearly equally frequent.
In order to estimate the reliability of the reference data, the accordance of the five interpreters is evaluated per class in
Table 1. The class “stable” was congruently classified by all five interpreters in more than 90% of the samples in the reference image. Due to the numerous occurrence of that class the high concordance is not surprising. When looking at the other classes the values for three to five identical classifications range between 20% and 40%. Further tests report even lower values for the same scenario [
19]. As the concordance in classifying changes is surprisingly low, the location of the discrepancies is checked in
Figure 17. The colors in the image refer to the colors used in
Table 1.
Obviously the high discrepancy can be referred—in most cases—to the size of the observed changes. That means that the interpreters used finer or coarser tools to mark the changes. Additionally, some small-sized changes have not been detected by all interpreters. In this example all larger changes were found by all human interpreters. According to [
19] even obvious changes are sometimes missed by human interpreters. As automated approaches in general do not use semantic information, they indicate each deviation in the backscattering independent of its location or environment. In contrast to that, human interpreters pre-classify the image in interesting parts, e.g., the harbor, and regions of no interest, e.g., open water. Thus, they save time because the area to be process significantly reduces. Apart from that, distinct changes lying inside or across regions of no interest are sometimes completely missed,
cf. [
19]. In summary, even human interpreters are not able to deliver an optimal reference for the validation of the automated change detection approach, but they are still most reliable in contrast to other automated methods, which will become obvious in the next subsection.
3.3. Accuracy Assessment
In the following, the changes marked by the human interpreters are compared to changes over 10 dB produced by the pixel-based log-ratios with and without supplementary GMAP speckle suppression—referred to as standard techniques—as well as by the novel Curvelet-based change detection. The confusion matrix is generated pixel-by-pixel although an object-based accuracy assessment would promise better results. However, as there are no standards for the choice of parameters (object size, buffer size, overlay ratio,
etc.) the results could be manipulated arbitrarily. The listed values are normalized by the total number of pixels and output as percentage. The color of the boxes is equal to the color used to illustrate the corresponding locations in
Figures 18 and
20. Gray tones mark correctly classified pixels. Blue and turquois indicate missed hits and false alarms respectively of negative changes while red and yellow refer to missed hits and false alarms of positive changes.
The confusion matrix for the simplest method,
i.e., the pixel-based log-ratio on radiometrically enhanced TerraSAR-X amplitude images, is given in the upper part of
Table 2. The surprisingly high total accuracy can be referred to the numerous occurrence of the class “stable” covering nearly 95% of the image. The completeness—related to missed hits—is quite good ranging around 70%. Considering
Figure 18 which shows the location of the missed hits reveals that they usually surround larger change patterns,
i.e., the missed hits are caused by a different estimation of the size of the change. The correctness—associated with the false alarm rate—is very low reaching 22% for false alarms of negative changes. These are almost exclusively small-scale changes on the open water surface presumably caused by noise, see
Figure 18. As water in general causes a very weak backscattering signal, even slight changes can provoke high change rates in the log-ratio. Those noise-induced hits have to be removed by an adequate filtering.
Therefore, the input images have been pre-processed by the GMAP filtering method (using ERDAS IMAGINE® 2011, window size: 7, coefficient of variation: 0.2). The confusion matrix in the middle of
Table 2 proves that there is a significant increase in the total accuracy to more than 95%. Although the completeness slightly decreases, the missed hits mass around larger change patterns (
Figure 19) and thus, can be attributed to the different size of the changes: these detected by the automated approach and those marked by the human interpreters. In contrary to that, the correctness improves to 47% for negative changes and even to 70% for positive changes. Looking at
Figure 19, there are still too many false alarms on the river as well as in the upper right corner of the image. In order to achieve reliable results, those false alarms need to be removed.
Finally, the changes detected by the Curvelet-based approach are compared to the manually-derived changes see the bottom of
Table 2. Apparently, there is no confusion between positive and negative changes
i.e., the direction of the changes always is correctly determined in contrast to the standard techniques above. The total accuracy now almost reaches 97%. The correctness once again raises and ranges around 72% for negative changes and even 86% for positive changes,
i.e., the Curvelet-based technique is robust and the automatically detected changes are quite reliable. The completeness again is lower ranging around 54%,
i.e., the reference is indicating more changed pixels than the automated approach produces. It was stated before that some of the interpreters used quite coarse tools to mark the changes. Therefore, the changes in the reference might be wider than the changes measured by the automated approach. Due to the pixels at the edges captured by the reference, but not captured by the automated approach the completeness values drop down. The confused pixels (see
Figure 20)—mainly the missed hits—are all restricted to the edges of detected objects. Apart from that, some false alarms are visible in the harbor area. Those are small objects that have not been identified by the human interpreters. However, it is reasonable that these are real changes, e.g., the neighbored blue and red points in the middle of
Figure 20 certainly refer to vehicles that have been moved from the blue positions the red positions in-between the two image acquisitions. Finally, it has to be mentioned that the very high accuracy stated in
Table 2 relativizes keeping in mind the quite low concordance of the visual interpreters who produced the reference data set. Apart from that, the visual interpretation still provides the most reliable even though most expensive image interpretation technique.
We can conclude that all changed objects that have been identified by the human interpreters have been detected by the automated approaches as well. Significant deviations can be observed only in the size of the objects. In comparison to the human interpreters the automated approaches deliver much faster and in general more complete results. But, the reliability of the indicated changes is highly variable. None of the standard techniques tested here could compete with our Curvelet-based approach in reducing the false alarm rate and, thus, guaranteeing reliable results. In contrast to the visual interpretation, the automated methods are repeatable: Even if the same image was given to same human interpreter several times, each product will be different from the others [
19]. However, human interpreters are able to pre-classify the image and then distinguish between changes of interest (e.g., changes on industrial facilities) and changes of no interest (e.g., changes on water surfaces caused by varying wind conditions). For automated approaches, this “masking” of areas of interest has to be done in a further step using additional geo-information on the land cover in the observed scene.
5. Conclusions
Novel image representations—especially the Curvelet coefficients—have proven a high potential for SAR image processing. The advantage of describing structures apparent in an image instead of single pixel values enables the distinction between significant image content and noise. Therefore, image comparison in terms of change detection is transported for the first time directly to the Curvelet coefficient domain. Out of the resulting differential Curvelet coefficients the ones holding distinct information can easily be selected by statistical methods. Artifacts in the enhanced images—that normally are quite frequent with novel image representations—are avoided by applying a newly developed weighting function that guarantees a smooth transition from coefficients kept unchanged and coefficients removed. The changes detected by the automated method are compared to the changes detected by today’s standard techniques, as well as by five human SAR interpreters. As a simple quality check already proved that even the results of human interpreters are highly variable, the majority of all five classifications is calculated as reference map. Although the three automated methods do not differ that much in numbers, checking the location of the missed hits and false alarms in a visual quality assessment documents that the standard techniques cannot compete with our new Curvelet-based approach in terms of reliability,
i.e., removing false alarms by small-scale noise-induced changes. Above all, the automated Curvelet-based approach still is much faster than any human interpreter. In order to underline the suitability of this approach time series of TerraSAR-X high resolution spotlight data over a construction site are processed. The change images clearly show the progress from one acquisition to the other. Especially for progress monitoring, it is convenient to display all new objects together in one single diagram showing their first appearance during the construction activities. Hence, construction stages become evident. As this approach is completely independent of any manual interaction, it is qualified for automated processing chains. Supplementary, being able to deliver reliable change detection results in a very short time, the Curvelet-based change detection excels as suitable tool for any rapid change detection application. The Curvelet approach designed for structural changes thus has proven its suitability in predominantly man-made environments while its usability for large-scale laminar changes expected in natural environments still has to be further investigated though preliminary studies reported surprisingly good results [
36]. The inclusion of multi-layer images like multi-polarized SAR acquisitions promises not only robust change detection results, but even a detailed change characterization which has already shown a high potential in wetland monitoring,
cf., previous studies in [
37]. At last, this innovative Curvelet-only-based image comparison technique—though developed and presented in the context of SAR remote sensing—turned out to be suitable for numerous other robust change detection purposes based on any kind of noisy image data during preliminary studies.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}